
車両用ベルト式無段変速機の制御装置
【課題】停車時の変速比のバラツキを、次回の発進時のショックに影響させない。
【解決手段】プライマリプーリ11と、セカンダリプーリ12と、プライマリプーリ11とセカンダリプーリ12とに巻き掛けられたVベルト13と、締結状態であるときにエンジン1からの回転をプライマリプーリ11に伝達する発進クラッチ3bと、プライマリ圧Ppriとセカンダリ圧Psecを制御するCVTコントロールユニット20および油圧コントロールユニット30と、を備えた車両用ベルト式無段変速機の制御装置において、車両が停車中で、かつ発進クラッチ3bが解放状態であるときに、停車時のプーリ比を維持したままで、プライマリ圧Ppriとセカンダリ圧Psecの油圧バランスを、車両の発進時における目標プーリ比を実現する油圧バランスとし、車両の発進時に、油圧バランスを保持したままで発進クラッチ3bの締結を行うようにした。
【解決手段】プライマリプーリ11と、セカンダリプーリ12と、プライマリプーリ11とセカンダリプーリ12とに巻き掛けられたVベルト13と、締結状態であるときにエンジン1からの回転をプライマリプーリ11に伝達する発進クラッチ3bと、プライマリ圧Ppriとセカンダリ圧Psecを制御するCVTコントロールユニット20および油圧コントロールユニット30と、を備えた車両用ベルト式無段変速機の制御装置において、車両が停車中で、かつ発進クラッチ3bが解放状態であるときに、停車時のプーリ比を維持したままで、プライマリ圧Ppriとセカンダリ圧Psecの油圧バランスを、車両の発進時における目標プーリ比を実現する油圧バランスとし、車両の発進時に、油圧バランスを保持したままで発進クラッチ3bの締結を行うようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用ベルト式無段変速機の制御装置に関する。
【背景技術】
【0002】
ベルト式無段変速機を搭載した車両では、車両が停止する前の減速時に、停車後の次回の発進に備えて、変速比(プーリ比)を最ローに戻して停車させるようにすることが行われている。
近年、停車後の次回の発進時におけるクラッチの締結ショックを抑えることを目的として、最ローよりもハイ側のプーリ比を、減速時に戻す目標のプーリ比としたものがある(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−310795号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に開示されたような従来例にかかるベルト式無段変速機では、例えば車両の減速度が非常に大きい場合に、目標のプーリ比に到達する前に車両が停止してしまい、プーリ比が、目標のプーリ比とは異なるプーリ比で固定されることがある。
この車両が停止したときのプーリ比は、車両の減速度によりバラツキが大きく、停車後の次回の発進時におけるクラッチの締結ショックの程度や駆動力を、常に同じようにすることが難しいため、運転者に違和感を与えることがあった。
【0005】
そこで、本発明は、停車時のプーリ比のバラツキが、停車後の次回の発進時におけるショックなどに影響しないようにすることを目的とする。
【課題を解決するための手段】
【0006】
本発明は、油圧に応じて溝幅が変化する入力側のプライマリプーリと、油圧に応じて溝幅が変化する出力側のセカンダリプーリと、プライマリプーリとセカンダリプーリとに巻き掛けられ、プライマリプーリの回転時に溝幅に応じたプーリ接触半径に変化してプーリ比を変化させるベルトと、エンジンとプライマリプーリとの間に設けられており、締結状態であるときにエンジンからの回転をプライマリプーリに伝達する摩擦締結要素と、プライマリプーリとセカンダリプーリに作用する油圧を制御する油圧制御手段と、を備えた車両用ベルト式無段変速機の制御装置において、油圧制御手段は、車両の発進時における目標プーリ比を決定すると共に、車両が停車中で、かつ摩擦締結要素が解放状態であるときに、停車時のプーリ比を維持したまま、プライマリプーリに作用する油圧とセカンダリプーリに作用する油圧とを、目標プーリ比を実現する油圧バランスとし、車両の発進時に、油圧バランスを保持したままで摩擦締結要素の締結を行う構成とした。
【発明の効果】
【0007】
本発明によれば、摩擦締結要素が締結されてエンジンの回転駆動力がプライマリプーリに入力される前に、プライマリプーリに作用する油圧とセカンダリプーリに作用する油圧とを、目標プーリ比を実現する油圧バランスとしておくことで、車両の発進時の摩擦締結要素の締結が開始されたときにプライマリプーリに入力される捩りトルクと回転により、プーリ比がメカ的に変更されて、車両が停車した時点のプーリ比から目標のプーリ比へと速やかに収束する。
よって、車両の停車時のプーリ比(変速比)にバラツキがあった場合でも、停車後の次回の発進時におけるプーリ比を一定の値にすることができるので、発進時におけるクラッチの締結ショックと駆動力とを安定させることができ、運転者に違和感を与えることを防止できる。すなわち、停車時のプーリ比のバラツキが、停車後の次回の発進時におけるショックなどに影響しない。
さらに、摩擦締結要素の締結の進行度にかかわらず、プーリ比がメカ的に変更されるように構成されているので、摩擦締結要素の締結の進行度を測るためのセンサ(タービン回転速度センサ)を必要としないので、部品点数を削減できる。
【図面の簡単な説明】
【0008】
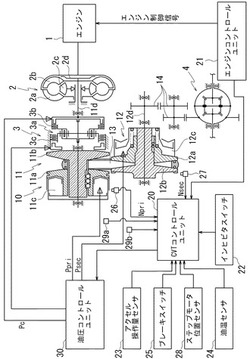
【図1】実施形態にかかる車両用ベルト式無段変速機の概略構成図である。
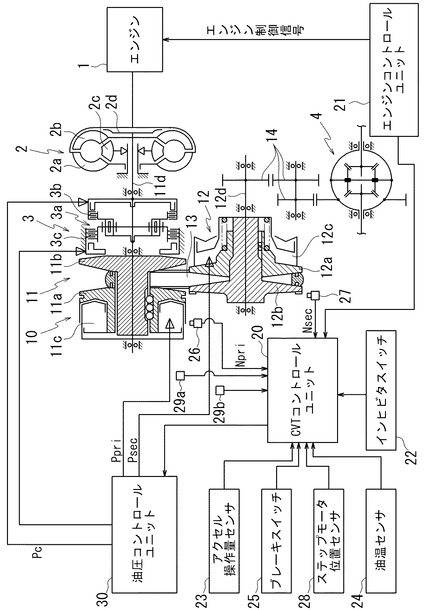
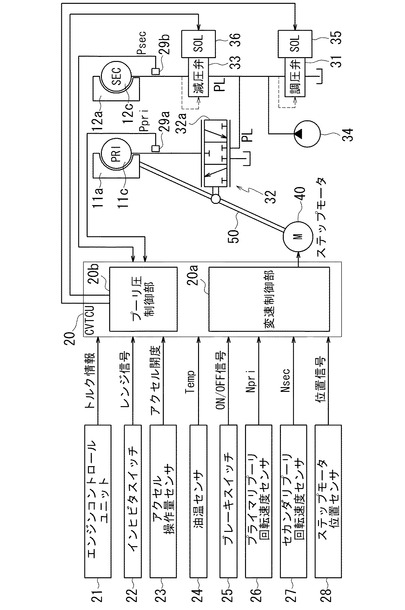
【図2】CVTコントロールユニットと油圧コントロールユニットの詳細構成を説明する構成図である。
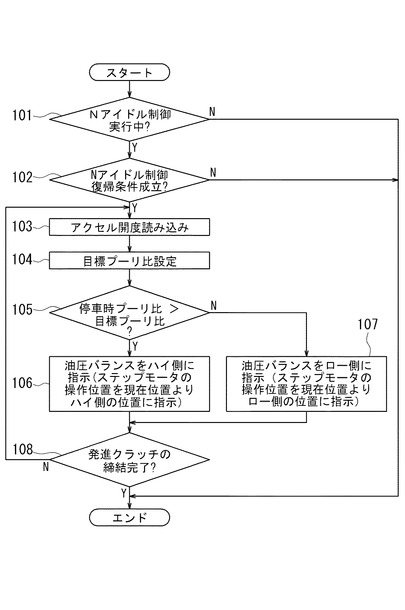
【図3】本発明にかかる油圧制御を説明するフローチャートである。
【図4】本発明にかかる油圧制御を説明するタイムチャートである。
【発明を実施するための形態】
【0009】
以下、本発明にかかるベルト式無段変速機の実施形態を説明する。
ベルト式無段変速機10は、プライマリプーリ11と、セカンダリプーリ12と、Vベルト13と、CVTコントロールユニット20と、油圧コントロールユニット30とを備える。
【0010】
プライマリプーリ11は、エンジン1と同軸に配置されており、エンジン1とプライマリプーリ11の間には、エンジン1側から順に、トルクコンバータ2、前後進切換え機構3が設けられている。
【0011】
トルクコンバータ2は、エンジン1の出力軸に連結されるポンプインペラ2a、前後進切換え機構3の入力軸に連結されるタービンランナ2b、ステータ2c、およびロックアップクラッチ2dを備える。
【0012】
前後進切換え機構3は、ダブルピニオン遊星歯車組3aを主たる構成要素とし、そのサンギヤはトルクコンバータ2のタービンランナ2bに結合され、キャリアはプライマリプーリ11に結合される。
前後進切換え機構3は、ダブルピニオン遊星歯車組3aのサンギヤとキャリアとの間を直結する発進クラッチ3b、およびリングギヤを固定する後進ブレーキ3cをさらに備える。そして、発進クラッチ3bの締結時には、エンジン1からトルクコンバータ2を経由した入力回転がそのままプライマリプーリ11に伝達され、後進ブレーキ3cの締結時には、エンジン1からトルクコンバータ2を経由した入力回転が逆転され、プライマリプーリ11に伝達される。
【0013】
プライマリプーリ11は、このベルト式無段変速機10にエンジン1の回転を入力する入力軸側のプーリである。プライマリプーリ11は、入力軸11dと一体となって回転する固定円錐板11bと、この固定円錐板11bに対向配置されてV字状のプーリ溝を形成するとともに、プライマリプーリシリンダ室11cへ作用する油圧(プライマリ圧Ppri)によって軸方向へ変位可能な可動円錐板11aとを備える。
プライマリプーリ11には、前後進切換え機構3と、トルクコンバータ2とを介して、エンジン1の回転駆動力が入力される。
プライマリプーリ11の回転速度は、プライマリプーリ回転速度センサ26によって検出される。
【0014】
セカンダリプーリ12は、出力軸12dと一体となって回転する固定円錐板12bと、この固定円錐板12bに対向配置されてV字状のプーリ溝を形成するとともに、セカンダリプーリシリンダ室12cへ作用する油圧(セカンダリ圧Psec)によって軸方向へ変位可能な可動円錐板12aとを備える。
【0015】
セカンダリプーリ12は、アイドラギア14とアイドラシャフトとを介して、ディファレンシャル4と連結しており、Vベルト13によって伝達された回転を、ディファレンシャル4に出力する。
セカンダリプーリ12の回転速度は、セカンダリプーリ回転速度センサ27によって検出される。
【0016】
Vベルト13は、プライマリプーリ11およびセカンダリプーリ12に巻き掛けられており、プライマリプーリ11の回転をセカンダリプーリ12に伝達する。
【0017】
CVTコントロールユニット20は、目標プーリ比やVベルト13の接触摩擦力などを決定し、油圧コントロールユニット30に指令を送信して、ベルト式無段変速機10を制御する。ここで、プーリ比は、セカンダリプーリ12の有効半径をプライマリプーリ11の有効半径で除した値であり、変速比と同義である。
さらに、CVTコントロールユニット20は、油圧コントロールユニット30に指令を送信して、前後進切換え機構3の摩擦締結要素(発進クラッチ3b、後進ブレーキ3c)や、トルクコンバータ2のロックアップクラッチ2dの締結・解放などを制御する。
【0018】
油圧コントロールユニット30は、CVTコントロールユニット20からの指令に基づいて、プライマリプーリ11のプライマリプーリシリンダ室11cに作用する油圧(プライマリ圧Ppri)と、セカンダリプーリ12のセカンダリプーリシリンダ室12cに作用する油圧(セカンダリ圧Psec)とを制御する。
【0019】
ベルト式無段変速機10では、プライマリプーリ11に入力された回転が、Vベルト13を介してセカンダリプーリ12に伝達されて、プライマリプーリ11とセカンダリプーリ12とが回転している際に、可動円錐板11aと可動円錐板12aとが、プライマリ圧とセカンダリ圧に応じて、回転軸方向に往復移動する。
可動円錐板11aと可動円錐板12aが移動すると、プーリ溝幅が変化して、Vベルト13がプライマリプーリ11およびセカンダリプーリ12上で径方向に移動するので、Vベルト13のプライマリプーリ11およびセカンダリプーリ12に対する接触半径が連続的に変わり、プーリ比とVベルト13の接触摩擦力とが、プライマリ圧とセカンダリ圧に応じて決まる値に制御される。
【0020】
さらに、油圧コントロールユニット30は、CVTコントロールユニット20からの指令に基づいて、前後進切換え機構3に供給する油圧(Pc)を制御して、摩擦締結要素(発進クラッチ3b、後進ブレーキ3c)の締結・解放を行う。
【0021】
図2は、実施形態にかかるベルト式無段変速機のCVTコントロールユニット20および油圧コントロールユニット30の概念図である。
【0022】
図2に示すように、CVTコントロールユニット20には、エンジンコントロールユニット21、インヒビタスイッチ22、アクセル操作量センサ23、油温センサ24、ブレーキスイッチ25、プライマリプーリ回転速度センサ26、セカンダリプーリ回転速度センサ27、ステップモータ位置センサ28、そして油圧センサ29a、29bからの信号が入力される。
【0023】
エンジンコントロールユニット21は、エンジン1からベルト式無段変速機10に入力される入力トルクの情報(トルク情報)を、CVTコントロールユニット20に出力する。
【0024】
インヒビタスイッチ22は、図示しないセレクトレバーの選択レンジが、例えばP(駐車)レンジ、R(後退)レンジ、N(中立)レンジ、D(走行)レンジの何れであるのかを示すレンジ信号を、CVTコントロールユニット20に出力する。
ここで、セレクトレバーの選択レンジがDレンジまたはRレンジに位置している場合に、ベルト式無段変速機10が走行状態にされている。
【0025】
アクセル操作量センサ23は、図示しないアクセルペダルの操作量を示す信号(アクセル開度)をCVTコントロールユニット20に出力する。
【0026】
油温センサ24は、潤滑油の温度を示す信号(Temp)を、CVTコントロールユニット20に出力する。
【0027】
ブレーキスイッチ25は、図示しないブレーキが、オン状態とオフ状態の何れであるのかを示す信号(ON/OFF信号)をCVTコントロールユニット20に出力する。
【0028】
プライマリプーリ回転速度センサ26は、プライマリプーリ11の回転速度を示す信号(Npri)をCVTコントロールユニット20に出力する。
セカンダリプーリ回転速度センサ27は、セカンダリプーリ12の回転速度を示す信号(Nsec)をCVTコントロールユニット20に出力する。
なお、CVTコントロールユニット20では、プライマリプーリ11の回転速度を示す信号(Npri)と、セカンダリプーリ12の回転速度を示す信号(Nsec)とに基づいて、実プーリ比(速度比)が算出されると共に、セカンダリプーリ12の回転速度を示す信号(Nsec)により、車両の速度(車速)が特定される。
【0029】
ステップモータ位置センサ28は、後記する変速制御弁32(図2参照)を変位させるステップモータ40の位置を示す信号(位置信号)を、CVTコントロールユニット20に出力する。
【0030】
油圧センサ29aは、プライマリプーリシリンダ室11cに作用する油圧(プライマリ圧Ppri)を示す信号を、CVTコントロールユニット20に出力する。
油圧センサ29bは、セカンダリプーリシリンダ室12cに作用する油圧(セカンダリ圧Psec)を示す信号を、CVTコントロールユニット20に出力する。
【0031】
CVTコントロールユニット20の変速制御部20aは、車速、アクセル開度、レンジ信号、プライマリプーリの回転速度Npriに応じて目標プーリ比(変速比)を決定し、ステップモータ40を駆動して実プーリ比を目標プーリ比に向けて制御する。
【0032】
プライマリプーリ11およびセカンダリプーリ12のプーリ比は、CVTコントロールユニット20(変速制御部20a)からの変速指令信号に応じて駆動されるステップモータ40によって制御され、ステップモータ40に応動するサーボリンク50の変位に応じて変速制御弁32のスプール32aが駆動され、変速制御弁32に供給されたライン圧PLが調整されてプライマリ圧をプライマリプーリ11へ供給し、溝幅が可変制御されて所定のプーリ比に設定される。
【0033】
CVTコントロールユニット20のプーリ圧制御部20bは、トルク情報、プライマリプーリの回転速度Npriとセカンダリプーリの回転速度Nsecとに基づくプーリ比(速度比)、油温Tempなどから、ライン圧の目標値を決定し、調圧弁31のソレノイド35を駆動することでライン圧の制御を行う。
また、プーリ圧制御部20bは、セカンダリ圧の目標値を決定して、油圧センサ29bの検出値と、目標値とに応じて減圧弁33のソレノイド36を駆動して、フィードバック制御(閉ループ制御)によりセカンダリ圧を制御する。
【0034】
油圧コントロールユニット30は、調圧弁31と、変速制御弁32と、減圧弁33とを備える。
調圧弁31は、ソレノイド35を有し、エンジン駆動される油圧ポンプ34から圧送された油の圧力を、CVTコントロールユニット20からの指令(例えば、デューティ信号など)に応じて運転状態に応じて決まる所定のライン圧PLに調圧する。
調圧弁31によって調圧されたライン圧PLは、変速制御弁32と、減圧弁33にそれぞれ供給される。
【0035】
変速制御弁32は、プライマリプーリシリンダ室11cへ供給される油圧(プライマリ圧)制御する制御弁である。
変速制御弁32は、メカニカルフィードバック機構を構成するサーボリンク50に連結され、サーボリンク50の一端に連結されたステップモータ40によって駆動されると共に、サーボリンク50の他端に連結したプライマリプーリ11の可動円錐板11aから溝幅、つまり実プーリ比のフィードバックを受ける。
変速制御弁32は、スプール32aの変位によってプライマリプーリシリンダ室11cへの油圧の吸排を行って、ステップモータ40の駆動位置で指令された目標プーリ比となるようにプライマリ圧を調整し、実際に変速が終了するとサーボリンク50からの変位を受けてスプール32aを閉弁位置に保持する。
【0036】
減圧弁33は、セカンダリプーリシリンダ室12cへ供給される油圧(セカンダリ圧)を制御する制御弁である。
減圧弁33は、ソレノイド36を有し、CVTコントロールユニット20からの指令(例えば、デューティ信号など)に応じて、セカンダリ圧を調圧する。
【0037】
実施形態にかかるベルト式無段変速機のCVTコントロールユニット20は、セレクトレバーが走行レンジ(Dレンジ、Rレンジ)に入れられて、ベルト式無段変速機10が走行状態にされたままで車両が停車した際に、Nアイドル制御(ニュートラル制御)を実行し、Nアイドル制御の実行中に車両が再発進する際に、Nアイドル抜け制御を行うようになっている。
【0038】
Nアイドル制御は、セレクトレバーが走行レンジ(Dレンジ、Rレンジ)に入れたままで車両が停車したときに行われる制御である。
【0039】
例えば、セレクトレバーが走行レンジ(Dレンジ)に入れられたままで車両が停車状態になると、トルクコンバータ2(図1参照)は、タービンランナ2bの回転速度(タービン回転速度)Ntがゼロのストール状態になるので、エンジン1の負荷が増大し、燃料消費量が増大する。
そのため、CVTコントロールユニット20は、前後進切換え機構3の発進クラッチ3bに供給される油圧(クラッチ油圧)Pcを下げて、発進クラッチ3bをNアイドル状態にさせるNアイドル制御を実行する。
【0040】
ここで、Nアイドル状態とは、発進クラッチ3bのクラッチ板の隙間がほぼゼロで、かつ、発進クラッチ3bが伝達することのできる上限トルクであるクラッチ容量が限りなくゼロに近い状態である。
この発進クラッチ3bをNアイドル状態にするNアイドル制御が実行されると、プライマリプーリ11を回転させずにタービンランナ2bが回転して、トルクコンバータ2がストール状態から解放されるので、エンジン1の負荷が下がり、燃料消費量を低減することができる。
なお、発進クラッチは、発進時の動力伝達系路上に存在する摩擦締結要素であり、実施形態においては、前進時(Dレンジ)は発進クラッチ3b、後進時(Rレンジ)は後進ブレーキ3cである。
また、Nアイドル制御の詳細は、特開2008−75709号公報に記載されている。
【0041】
Nアイドル抜け制御は、Nアイドル制御を終了する際に行われる制御である。
CVTコントロールユニット20は、車両が停車する前の減速時に、停車後の次回の発進時に備えて、プーリ比(変速比)を最ロー側に変化させ、停車時に目標とする最ロー側のプーリ比となるように制御している。
しかし、車両の減速度が大きい場合には、目標のプーリ比に到達する前に車両が停止して、プーリ比が目標のプーリ比とは異なるプーリ比で固定されるので、車両が停車した時点でのプーリ比は、減速度に応じて異なり、常に同じ値にならない。
【0042】
そのため、Nアイドル制御が行われている状況のもとで車両が再発進する場合、Nアイドル制御を終了してそのまま通常の制御に復帰させると、車両が停車した時点のプーリ比は常に同じ値にならないので、再発進のたびに異なる大きさの締結ショックなどが発生して、運転者に違和感を与えてしまう。
よって、車両が停車した時点のプーリ比が常に同じ値にならない場合であっても、再発進時の締結ショックの大きさのバラツキを抑えるために、Nアイドル抜け制御は行われる。
【0043】
以下、Nアイドル抜け制御を詳細に説明する。
図3は、図示しないセレクトレバーが走行レンジ(Dレンジ)に入れられて、ベルト式無段変速機10が走行状態にされたままで車両が停車して、Nアイドル制御が実行されている場合におけるNアイドル抜け制御を説明するフローチャートであり、図4は、Nアイドル抜け制御を説明するタイムチャートである。
【0044】
ステップ101においてNアイドル制御が実行中であると判断されると、ステップ102において、CVTコントロールユニット20は、Nアイドル制御を終了させて通常の制御に復帰させるための条件(Nアイドル制御復帰条件)が成立したか否かを確認する。
【0045】
Nアイドル制御は、セレクトレバーが走行レンジ(Dレンジ)に入れられたままで車両が停車している時に実施されるので、CVTコントロールユニット20は、例えば、オン状態であったブレーキがオフ状態になった時点で、Nアイドル制御復帰条件が成立したと判断する。
なお、ブレーキがオフ状態になったか否かは、ブレーキスイッチ25から入力されるON/OFF信号に基づいて特定される。
【0046】
ステップ102においてNアイドル制御復帰条件が成立したと判断されると、CVTコントロールユニット20は、Nアイドル抜け制御を開始する。
これにより、前後進切換え機構3の摩擦締結要素(発進クラッチ3b)に供給される油圧と、プライマリプーリ11とセカンダリプーリ12とに供給される油圧の、Nアイドル抜け制御が並行して行われる。
【0047】
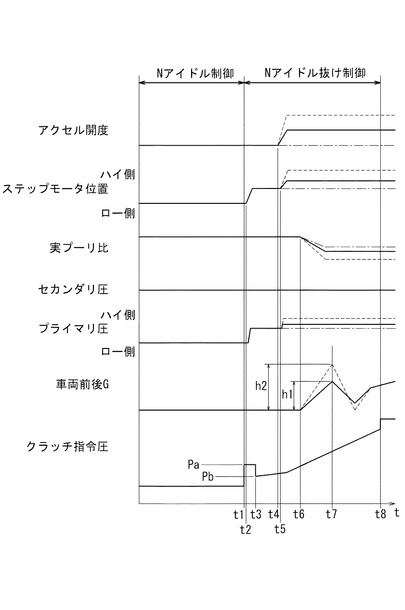
前後進切換え機構3に供給される油圧のNアイドル抜け制御では、CVTコントロールユニット20は、油圧コントロールユニット30に指令を出力して、図4に示すように、前後進切換え機構3の発進クラッチ3b(図1参照)に供給する作動油圧の指令圧(クラッチ指令圧)を、Nアイドル制御復帰条件が成立したと判断された時刻t1から時刻t3までの間、プリチャージ圧Paで保持したのち、プリチャージ圧Paよりも低い圧Pbに低下させる。そして、クラッチ指令圧を、圧Pbから所定勾配で上昇させて、発進クラッチ3bの締結・解放を行う図示しないピストンを、発進クラッチ3bを締結させる方向にストロークさせる。
【0048】
一方、プライマリプーリ11とセカンダリプーリ12とに供給される油圧のNアイドル抜け制御では、ステップ103において、CVTコントロールユニット20が、アクセル操作量センサ23から入力される信号に基づいて、アクセル開度を特定する。
【0049】
ステップ104において、CVTコントロールユニット20は、特定したアクセル開度に基づいて、目標プーリ比を設定する。
ここで、目標プーリ比は、プーリ比(変速比)が最大となる最ロー値よりもハイ側の値(変速比が小さくなる側の値)に設定される。停車後の次回の発進時のショックを抑えるためである。
【0050】
なお、実施形態では、目標プーリ比は、アクセル開度に応じて補正されるようになっており、アクセル開度が大きくなるほど、目標プーリ比の値は、ハイ側の値にシフトする。
ちなみに、図4の場合には、Nアイドル抜け制御が開始された時刻t1におけるアクセル開度はゼロなので、設定される目標プーリ比の値は、予め設定された初期値である。
【0051】
ステップ105において、CVTコントロールユニット20は、車両が停車した時のプーリ比(停車時プーリ比)と、目標プーリ比とを比較する。
なお、車両が停車したときのプーリ比は、停車直前のセカンダリプーリ回転速度Nsecを停車直前のプライマリプーリ回転速度Npriで除算することで算出される。
【0052】
そして、停車時プーリ比のほうが目標プーリ比よりも大きい(停車時プーリ比>目標プーリ比)場合、目標プーリ比は、停車時プーリ比から見てハイ側(プーリ比が小さくなる側)にあるので、ステップ106において、CVTコントロールユニット20は、再発進時に目標プーリ比を実現するために、プライマリ圧とセカンダリ圧とが、目標プーリ比を実現する圧力となるように、ステップモータ40と減圧弁33とを駆動させる。
すなわち、プライマリプーリ11のプライマリ圧と、セカンダリプーリ12のセカンダリ圧との油圧バランスを、ハイ側に指示する。
【0053】
例えば図4の場合には、時刻t2において、ステップモータ40の操作位置を現在位置よりもハイ側の位置に移動させてプライマリ圧のみを上昇させることで、停車時プーリ比よりもハイ側の目標プーリ比が与えられる油圧バランスにしている。
【0054】
ここで、Nアイドル制御の実行中には、前後進切換え機構3の発進クラッチ3bはNアイドル状態にされており、プライマリプーリ11を回転させずにタービンランナ2bのみが回転している。ベルト式無段変速機10では、プライマリプーリ11とセカンダリプーリ12とが回転することで、プライマリプーリ11の溝幅とセカンダリプーリ12の溝幅とが、それぞれプライマリ圧とセカンダリ圧とで決まる溝幅に変化して、プーリ比が決まるようになっている。
そのため、プライマリプーリ11に回転が入力されていないNアイドル抜け制御の初期の段階では、前後進切換え機構3の発進クラッチ3bが係合しておらずプライマリプーリ11に回転トルクは入力されていない。よって、プライマリ圧が上昇させられて、プライマリ圧とセカンダリ圧とが目標プーリ比を与える油圧バランスに変更された時点(時刻t2)では、実プーリ比は、車両が停車したときのプーリ比のままで変化しない。
【0055】
そして、Nアイドル抜け制御の進行により、発進クラッチ3bのクラッチ容量が増加して、プライマリプーリ11に回転トルクが入力され始めた時点(時刻t6)で、油圧バランスと釣り合う位置まで固定円錐板11b、固定円錐板12bが変位してプーリ溝幅が変更される。これにより、実プーリ比が油圧バランスと釣り合う位置までシフトして、目標プーリ比に変更される。
よって、発進クラッチ3bの締結が完了して、エンジン1の回転がプライマリプーリ11に入力される時点(時刻t8)では、目標プーリ比が達成されており、停車時のプーリ比に拘わらず常に目標プーリ比で車両の再発進が行われる。
【0056】
一方、ステップ105において、停車時のプーリ比が目標プーリ比よりも大きくない(停車時プーリ比≦目標プーリ比)場合、目標プーリ比は、停車時プーリ比から見てロー側(プーリ比が大きくなる側)にあるので、ステップ107において、CVTコントロールユニット20は、再発進時に目標プーリ比を実現するために、プライマリ圧とセカンダリ圧とが、目標プーリ比を実現する圧力となるように、ステップモータ40と減圧弁33とを駆動させる。
すなわち、プライマリプーリ11のプライマリ圧と、セカンダリプーリ12のセカンダリ圧との油圧バランスを、ロー側に指示する。
【0057】
このようにすることによっても、発進クラッチ3bのクラッチ容量が増加して、プライマリプーリ11が回転し始めた時点で、油圧バランスと釣り合う位置まで固定円錐板11b、固定円錐板12bが変位して溝幅が変更されて、プーリ比が目標プーリ比に変更される。
よって、発進クラッチ3bの締結が完了して、エンジン1の回転がプライマリプーリ11に入力された時点では、目標プーリ比が達成されており、停車時のプーリ比に拘わらず常に同じプーリ比で車両の再発進が行われる。
【0058】
そして、ステップ108において、発進クラッチ3bの締結が完了したと判定された時点で、CVTコントロールユニット20は、Nアイドル抜け制御を終了する。
【0059】
なお、発進クラッチ3bの締結が完了したと判定されるまでの間は、アクセル開度の取得から目標プーリ比の設定、油圧バランスの指示までの処理(ステップ103〜ステップ107)が繰り返し実行される。
そのため、発進クラッチの締結が完了する時刻t8までの間で、アクセル開度が変化した場合には、目標プーリ比は、アクセル開度の変化量に応じて変更される。
【0060】
例えば図4の場合、図中実線で示すように、締結が開始される前の時刻t4においてアクセル開度が大きくなっているので、目標プーリ比の値がハイ側(プーリ比が小さくなる側)に変更される。そうすると、変更後の目標プーリ比を実現するために、時刻t5において、ステップモータ40の操作位置が現在位置よりもハイ側の位置に移動させられる。
これにより、プライマリ圧のみが、アクセル開度に応じて大きくなり、プライマリ圧とセカンダリ圧の油圧バランスが、変更後の目標プーリ比を実現する油圧バランスに変更される。
よって、発進クラッチ3bのクラッチ容量が増加して、プライマリプーリ11に回転トルクが入力され始めた時点(時刻t6)で、図中実線で示すように、実プーリ比が、変更後の目標プーリ比に変更される。
【0061】
なお、前記したように目標プーリ比の値は、アクセル開度が大きくなるほどよりハイ側に変更される。
よって、図4において点線で示すように時刻t5におけるアクセル開度がより大きくなるほど、ステップモータ40の操作位置がよりハイ側に移動させられて、プライマリ圧がハイ側にシフトするので、プライマリプーリ11に回転トルクが入力され始めた時点(時刻t6)以降の実プーリ比も、プーリ比が小さくなるハイ側にシフトする。
【0062】
また、実施形態では、目標プーリ比は、プーリ比(変速比)が最大となる最ロー値よりも若干ハイ側(最大となるプーリ比よりも若干小さい値のプーリ比)に設定されているので、図4に示す車両前後Gの振れ幅h1、h2は、目標プーリ比を最ロー値とした場合(図中点線で示す)よりも、若干ハイ側の値とした場合(図中実線で示す)のほうが小さくなる。従って、発進クラッチ3bが締結されるとき(時刻t7の前後)の締結ショックが、より抑えられるようになっている。
【0063】
ちなみに、発進クラッチの締結が完了する時刻t8までの間で、アクセル開度が変化しない場合には、時刻t2において設定された目標プーリ比は変更されないので、図中一点鎖線で示すように、ステップモータ位置、プライマリ圧は、時刻t2で変更された位置、値のままで保持される。
【0064】
ここで、実施形態における発進クラッチ3b、後進ブレーキ3cが、発明における摩擦締結要素に相当し、実施形態におけるCVTコントロールユニット20および油圧コントロールユニット30で、発明における油圧制御手段が構成される。
【0065】
以上の通り、実施形態では、図1に示すように、油圧に応じて溝幅が変化する入力側のプライマリプーリ11と、油圧に応じて溝幅が変化する出力側のセカンダリプーリ12と、プライマリプーリ11とセカンダリプーリ12とに巻き掛けられ、プライマリプーリ11の回転により溝幅に応じたプーリ接触半径に変化してプーリ比を変化させるVベルト13と、エンジン1とプライマリプーリ11との間に設けられており、締結状態であるときにエンジン1からの回転をプライマリプーリ11に伝達する後進切換え機構3の発進クラッチ3bと、プライマリプーリ11とセカンダリプーリ12に作用する油圧を制御する油圧制御手段(CVTコントロールユニット20および油圧コントロールユニット30)と、を備えた車両用ベルト式無段変速機の制御装置において、油圧制御手段は、図4に示すように、車両の発進時における目標プーリ比を決定すると共に、車両が停車中で、かつ発進クラッチ3bが解放状態であるときに、停車時のプーリ比を維持したまま、プライマリプーリシリンダ室11cに作用するプライマリ圧とセカンダリプーリシリンダ室12cに作用するセカンダリ圧とを、目標プーリ比を実現する油圧バランスとし、車両の発進時に、油圧バランスを保持したままで発進クラッチ3bの締結を行う構成とした。
これにより、発進クラッチ3bが締結されてエンジン1の回転駆動力がプライマリプーリ11に入力される前に、プライマリ圧とセカンダリ圧とを、目標プーリ比を実現する油圧バランスとしておくことで、車両の発進時の発進クラッチ3bの締結が開始されたときにプライマリプーリ11に入力される捩りトルクと回転により、プーリ比がメカ的に変更されて、車両が停車して時点のプーリ比から目標のプーリ比へと速やかに収束する。
よって、車両の停車時のプーリ比(変速比)にバラツキがあった場合でも、停車後の次回の発進時におけるプーリ比を一定の値にすることができるので、発進時における発進クラッチ3bの係合ショックと、エンジン1から入力される回転駆動力とを安定させることができ、運転者に違和感を与えることを防止できる。
さらに、発進クラッチ3bの締結の進行度にかかわらず、プーリ比がメカ的に変更されるように構成されているので、発進クラッチ3bの締結の進行度を測るためのセンサ(タービン回転数センサ)を必要としないので、部品点数を削減できる。
また、タービン回転数センサを搭載していない自動変速機にも適用可能となる。
【0066】
さらに、セレクトレバーが走行レンジ(Dレンジ、Rレンジ)に入れられて、ベルト式無段変速機10が走行状態にされたままで車両が停車した場合には、Nアイドル制御が実施されているので、目標プーリ比の値を、プーリ比が最大となる最ローよりもハイ側(プーリ比が小さくなる側)の値に設定する構成とした。
ベルト式無段変速機10が走行状態にされたままで車両が停車した場合には、Nアイドル制御が行われており、このNアイドル制御を終了する際には、発進クラッチ3bを早急に締結して車両の発進性を確保するために、締結油圧が上げられている。そのため、発進クラッチ3bが締結される際の締結ショックが大きくなる傾向がある。目標プーリ比をハイ側の値にすると、発進クラッチ3bが締結された時点のプーリ比(変速比)が小さくなるので、その分だけドライブシャフトに伝達されるトルクが小さくなり、発進クラッチ3bの締結に伴うショックを抑えることができる。
また、締結ショックの低減が可能なので、さらに発進クラッチ3bの締結を早めることができるので、トルクダウン解放を前出しすることで発進性能が向上する。
【0067】
また、ブレーキペダルが離されてブレーキがオフ状態とされた時点のように、車両の再発進時における発進クラッチ3bの締結開始の直前に、プライマリ圧とセカンダリ圧とを、目標プーリ比を実現する油圧バランスとする構成とした。
これにより、プライマリプーリ11、セカンダリプーリ12、そしてVベルト13に負荷がかかる時間を短くすることができるので、耐久性の向上を図ることができる。
【0068】
さらに、アクセルペダルの踏み込み量に応じて変化するアクセル開度に応じて、目標プーリ比を補正すると共に、アクセル開度が大きいほど、目標プーリ比の値を、ハイ側(プーリ比の値が小さくなる側)に補正する構成とした。
アクセルペダルが踏み込まれてアクセル開度が大きくなると、エンジン1から入力される回転駆動力がアクセル開度に応じて大きくなると共に、発進クラッチ3bの締結速度が速くなるので、締結ショックが大きくなる。
アクセル開度の大きさに応じて目標プーリ比の値をハイ側に補正して、アップシフトの量を可変とすることで、アクセル開度が大きく、プライマリプーリ11に入力される捩れトルクが大きいときであっても締結ショックが大きくなることを防止できる。
【0069】
実施形態では、セレクトレバーの選択レンジが、前進レンジであるDレンジである場合を例に挙げて説明をしたが、選択レンジが後退レンジであるRレンジである場合にも、本発明は適用可能である。
この場合、車両の発進時には、プライマリ圧とセカンダリ圧とが目標プーリ比を実現する油圧バランスに保持されたままで、後退ブレーキ3cの締結が行なわれることになる。このようにすることによっても、実施形態の場合と同様の作用効果が奏される。
【0070】
さらに、実施形態では、プライマリ圧とセカンダリ圧の油圧バランスをハイ側に指令する場合(図3参照)の具体例として、プライマリ圧のみを上昇させる場合を例示した(図4参照)が、セカンダリ圧のみを下げることで、またはプライマリ圧とセカンダリ圧の両方を変更することで、プーリ比がハイ側にシフトするようにしても良い。
【0071】
また、実施形態では、オン状態であったブレーキがオフ状態となった場合に、Nアイドル制御復帰条件が成立していると判断する構成としたが、アクセルペダルが踏み込まれてアクセル開度が閾値よりも大きくなった場合や、図示しないパーキングブレーキがオフ状態となった場合のように、車両の発進に関与する機器の出力信号から車両が発進するか否かを判断することで、Nアイドル制御復帰条件が成立しているか否かを判断するようにしても良い。
【符号の説明】
【0072】
1 エンジン
2 トルクコンバータ
3 前後進切換え機構
3b 発進クラッチ
3c 後進ブレーキ
4 ディファレンシャル
10 ベルト式無段変速機
11 プライマリプーリ
12 セカンダリプーリ
13 Vベルト(ベルト)
14 アイドラギア
20 CVTコントロールユニット
20a 変速制御部
20b プーリ圧制御部
21 エンジンコントロールユニット
22 インヒビタスイッチ
23 アクセル操作量センサ
24 油温センサ
25 ブレーキスイッチ
26 プライマリプーリ回転速度センサ
27 セカンダリプーリ回転速度センサ
28 ステップモータ位置センサ
29a、29b 油圧センサ
30 油圧コントロールユニット
31 調圧弁
32 変速制御弁
33 減圧弁
34 油圧ポンプ
35 ソレノイド
36 ソレノイド
40 ステップモータ
50 サーボリンク
【技術分野】
【0001】
本発明は、車両用ベルト式無段変速機の制御装置に関する。
【背景技術】
【0002】
ベルト式無段変速機を搭載した車両では、車両が停止する前の減速時に、停車後の次回の発進に備えて、変速比(プーリ比)を最ローに戻して停車させるようにすることが行われている。
近年、停車後の次回の発進時におけるクラッチの締結ショックを抑えることを目的として、最ローよりもハイ側のプーリ比を、減速時に戻す目標のプーリ比としたものがある(例えば、特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平7−310795号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、特許文献1に開示されたような従来例にかかるベルト式無段変速機では、例えば車両の減速度が非常に大きい場合に、目標のプーリ比に到達する前に車両が停止してしまい、プーリ比が、目標のプーリ比とは異なるプーリ比で固定されることがある。
この車両が停止したときのプーリ比は、車両の減速度によりバラツキが大きく、停車後の次回の発進時におけるクラッチの締結ショックの程度や駆動力を、常に同じようにすることが難しいため、運転者に違和感を与えることがあった。
【0005】
そこで、本発明は、停車時のプーリ比のバラツキが、停車後の次回の発進時におけるショックなどに影響しないようにすることを目的とする。
【課題を解決するための手段】
【0006】
本発明は、油圧に応じて溝幅が変化する入力側のプライマリプーリと、油圧に応じて溝幅が変化する出力側のセカンダリプーリと、プライマリプーリとセカンダリプーリとに巻き掛けられ、プライマリプーリの回転時に溝幅に応じたプーリ接触半径に変化してプーリ比を変化させるベルトと、エンジンとプライマリプーリとの間に設けられており、締結状態であるときにエンジンからの回転をプライマリプーリに伝達する摩擦締結要素と、プライマリプーリとセカンダリプーリに作用する油圧を制御する油圧制御手段と、を備えた車両用ベルト式無段変速機の制御装置において、油圧制御手段は、車両の発進時における目標プーリ比を決定すると共に、車両が停車中で、かつ摩擦締結要素が解放状態であるときに、停車時のプーリ比を維持したまま、プライマリプーリに作用する油圧とセカンダリプーリに作用する油圧とを、目標プーリ比を実現する油圧バランスとし、車両の発進時に、油圧バランスを保持したままで摩擦締結要素の締結を行う構成とした。
【発明の効果】
【0007】
本発明によれば、摩擦締結要素が締結されてエンジンの回転駆動力がプライマリプーリに入力される前に、プライマリプーリに作用する油圧とセカンダリプーリに作用する油圧とを、目標プーリ比を実現する油圧バランスとしておくことで、車両の発進時の摩擦締結要素の締結が開始されたときにプライマリプーリに入力される捩りトルクと回転により、プーリ比がメカ的に変更されて、車両が停車した時点のプーリ比から目標のプーリ比へと速やかに収束する。
よって、車両の停車時のプーリ比(変速比)にバラツキがあった場合でも、停車後の次回の発進時におけるプーリ比を一定の値にすることができるので、発進時におけるクラッチの締結ショックと駆動力とを安定させることができ、運転者に違和感を与えることを防止できる。すなわち、停車時のプーリ比のバラツキが、停車後の次回の発進時におけるショックなどに影響しない。
さらに、摩擦締結要素の締結の進行度にかかわらず、プーリ比がメカ的に変更されるように構成されているので、摩擦締結要素の締結の進行度を測るためのセンサ(タービン回転速度センサ)を必要としないので、部品点数を削減できる。
【図面の簡単な説明】
【0008】
【図1】実施形態にかかる車両用ベルト式無段変速機の概略構成図である。
【図2】CVTコントロールユニットと油圧コントロールユニットの詳細構成を説明する構成図である。
【図3】本発明にかかる油圧制御を説明するフローチャートである。
【図4】本発明にかかる油圧制御を説明するタイムチャートである。
【発明を実施するための形態】
【0009】
以下、本発明にかかるベルト式無段変速機の実施形態を説明する。
ベルト式無段変速機10は、プライマリプーリ11と、セカンダリプーリ12と、Vベルト13と、CVTコントロールユニット20と、油圧コントロールユニット30とを備える。
【0010】
プライマリプーリ11は、エンジン1と同軸に配置されており、エンジン1とプライマリプーリ11の間には、エンジン1側から順に、トルクコンバータ2、前後進切換え機構3が設けられている。
【0011】
トルクコンバータ2は、エンジン1の出力軸に連結されるポンプインペラ2a、前後進切換え機構3の入力軸に連結されるタービンランナ2b、ステータ2c、およびロックアップクラッチ2dを備える。
【0012】
前後進切換え機構3は、ダブルピニオン遊星歯車組3aを主たる構成要素とし、そのサンギヤはトルクコンバータ2のタービンランナ2bに結合され、キャリアはプライマリプーリ11に結合される。
前後進切換え機構3は、ダブルピニオン遊星歯車組3aのサンギヤとキャリアとの間を直結する発進クラッチ3b、およびリングギヤを固定する後進ブレーキ3cをさらに備える。そして、発進クラッチ3bの締結時には、エンジン1からトルクコンバータ2を経由した入力回転がそのままプライマリプーリ11に伝達され、後進ブレーキ3cの締結時には、エンジン1からトルクコンバータ2を経由した入力回転が逆転され、プライマリプーリ11に伝達される。
【0013】
プライマリプーリ11は、このベルト式無段変速機10にエンジン1の回転を入力する入力軸側のプーリである。プライマリプーリ11は、入力軸11dと一体となって回転する固定円錐板11bと、この固定円錐板11bに対向配置されてV字状のプーリ溝を形成するとともに、プライマリプーリシリンダ室11cへ作用する油圧(プライマリ圧Ppri)によって軸方向へ変位可能な可動円錐板11aとを備える。
プライマリプーリ11には、前後進切換え機構3と、トルクコンバータ2とを介して、エンジン1の回転駆動力が入力される。
プライマリプーリ11の回転速度は、プライマリプーリ回転速度センサ26によって検出される。
【0014】
セカンダリプーリ12は、出力軸12dと一体となって回転する固定円錐板12bと、この固定円錐板12bに対向配置されてV字状のプーリ溝を形成するとともに、セカンダリプーリシリンダ室12cへ作用する油圧(セカンダリ圧Psec)によって軸方向へ変位可能な可動円錐板12aとを備える。
【0015】
セカンダリプーリ12は、アイドラギア14とアイドラシャフトとを介して、ディファレンシャル4と連結しており、Vベルト13によって伝達された回転を、ディファレンシャル4に出力する。
セカンダリプーリ12の回転速度は、セカンダリプーリ回転速度センサ27によって検出される。
【0016】
Vベルト13は、プライマリプーリ11およびセカンダリプーリ12に巻き掛けられており、プライマリプーリ11の回転をセカンダリプーリ12に伝達する。
【0017】
CVTコントロールユニット20は、目標プーリ比やVベルト13の接触摩擦力などを決定し、油圧コントロールユニット30に指令を送信して、ベルト式無段変速機10を制御する。ここで、プーリ比は、セカンダリプーリ12の有効半径をプライマリプーリ11の有効半径で除した値であり、変速比と同義である。
さらに、CVTコントロールユニット20は、油圧コントロールユニット30に指令を送信して、前後進切換え機構3の摩擦締結要素(発進クラッチ3b、後進ブレーキ3c)や、トルクコンバータ2のロックアップクラッチ2dの締結・解放などを制御する。
【0018】
油圧コントロールユニット30は、CVTコントロールユニット20からの指令に基づいて、プライマリプーリ11のプライマリプーリシリンダ室11cに作用する油圧(プライマリ圧Ppri)と、セカンダリプーリ12のセカンダリプーリシリンダ室12cに作用する油圧(セカンダリ圧Psec)とを制御する。
【0019】
ベルト式無段変速機10では、プライマリプーリ11に入力された回転が、Vベルト13を介してセカンダリプーリ12に伝達されて、プライマリプーリ11とセカンダリプーリ12とが回転している際に、可動円錐板11aと可動円錐板12aとが、プライマリ圧とセカンダリ圧に応じて、回転軸方向に往復移動する。
可動円錐板11aと可動円錐板12aが移動すると、プーリ溝幅が変化して、Vベルト13がプライマリプーリ11およびセカンダリプーリ12上で径方向に移動するので、Vベルト13のプライマリプーリ11およびセカンダリプーリ12に対する接触半径が連続的に変わり、プーリ比とVベルト13の接触摩擦力とが、プライマリ圧とセカンダリ圧に応じて決まる値に制御される。
【0020】
さらに、油圧コントロールユニット30は、CVTコントロールユニット20からの指令に基づいて、前後進切換え機構3に供給する油圧(Pc)を制御して、摩擦締結要素(発進クラッチ3b、後進ブレーキ3c)の締結・解放を行う。
【0021】
図2は、実施形態にかかるベルト式無段変速機のCVTコントロールユニット20および油圧コントロールユニット30の概念図である。
【0022】
図2に示すように、CVTコントロールユニット20には、エンジンコントロールユニット21、インヒビタスイッチ22、アクセル操作量センサ23、油温センサ24、ブレーキスイッチ25、プライマリプーリ回転速度センサ26、セカンダリプーリ回転速度センサ27、ステップモータ位置センサ28、そして油圧センサ29a、29bからの信号が入力される。
【0023】
エンジンコントロールユニット21は、エンジン1からベルト式無段変速機10に入力される入力トルクの情報(トルク情報)を、CVTコントロールユニット20に出力する。
【0024】
インヒビタスイッチ22は、図示しないセレクトレバーの選択レンジが、例えばP(駐車)レンジ、R(後退)レンジ、N(中立)レンジ、D(走行)レンジの何れであるのかを示すレンジ信号を、CVTコントロールユニット20に出力する。
ここで、セレクトレバーの選択レンジがDレンジまたはRレンジに位置している場合に、ベルト式無段変速機10が走行状態にされている。
【0025】
アクセル操作量センサ23は、図示しないアクセルペダルの操作量を示す信号(アクセル開度)をCVTコントロールユニット20に出力する。
【0026】
油温センサ24は、潤滑油の温度を示す信号(Temp)を、CVTコントロールユニット20に出力する。
【0027】
ブレーキスイッチ25は、図示しないブレーキが、オン状態とオフ状態の何れであるのかを示す信号(ON/OFF信号)をCVTコントロールユニット20に出力する。
【0028】
プライマリプーリ回転速度センサ26は、プライマリプーリ11の回転速度を示す信号(Npri)をCVTコントロールユニット20に出力する。
セカンダリプーリ回転速度センサ27は、セカンダリプーリ12の回転速度を示す信号(Nsec)をCVTコントロールユニット20に出力する。
なお、CVTコントロールユニット20では、プライマリプーリ11の回転速度を示す信号(Npri)と、セカンダリプーリ12の回転速度を示す信号(Nsec)とに基づいて、実プーリ比(速度比)が算出されると共に、セカンダリプーリ12の回転速度を示す信号(Nsec)により、車両の速度(車速)が特定される。
【0029】
ステップモータ位置センサ28は、後記する変速制御弁32(図2参照)を変位させるステップモータ40の位置を示す信号(位置信号)を、CVTコントロールユニット20に出力する。
【0030】
油圧センサ29aは、プライマリプーリシリンダ室11cに作用する油圧(プライマリ圧Ppri)を示す信号を、CVTコントロールユニット20に出力する。
油圧センサ29bは、セカンダリプーリシリンダ室12cに作用する油圧(セカンダリ圧Psec)を示す信号を、CVTコントロールユニット20に出力する。
【0031】
CVTコントロールユニット20の変速制御部20aは、車速、アクセル開度、レンジ信号、プライマリプーリの回転速度Npriに応じて目標プーリ比(変速比)を決定し、ステップモータ40を駆動して実プーリ比を目標プーリ比に向けて制御する。
【0032】
プライマリプーリ11およびセカンダリプーリ12のプーリ比は、CVTコントロールユニット20(変速制御部20a)からの変速指令信号に応じて駆動されるステップモータ40によって制御され、ステップモータ40に応動するサーボリンク50の変位に応じて変速制御弁32のスプール32aが駆動され、変速制御弁32に供給されたライン圧PLが調整されてプライマリ圧をプライマリプーリ11へ供給し、溝幅が可変制御されて所定のプーリ比に設定される。
【0033】
CVTコントロールユニット20のプーリ圧制御部20bは、トルク情報、プライマリプーリの回転速度Npriとセカンダリプーリの回転速度Nsecとに基づくプーリ比(速度比)、油温Tempなどから、ライン圧の目標値を決定し、調圧弁31のソレノイド35を駆動することでライン圧の制御を行う。
また、プーリ圧制御部20bは、セカンダリ圧の目標値を決定して、油圧センサ29bの検出値と、目標値とに応じて減圧弁33のソレノイド36を駆動して、フィードバック制御(閉ループ制御)によりセカンダリ圧を制御する。
【0034】
油圧コントロールユニット30は、調圧弁31と、変速制御弁32と、減圧弁33とを備える。
調圧弁31は、ソレノイド35を有し、エンジン駆動される油圧ポンプ34から圧送された油の圧力を、CVTコントロールユニット20からの指令(例えば、デューティ信号など)に応じて運転状態に応じて決まる所定のライン圧PLに調圧する。
調圧弁31によって調圧されたライン圧PLは、変速制御弁32と、減圧弁33にそれぞれ供給される。
【0035】
変速制御弁32は、プライマリプーリシリンダ室11cへ供給される油圧(プライマリ圧)制御する制御弁である。
変速制御弁32は、メカニカルフィードバック機構を構成するサーボリンク50に連結され、サーボリンク50の一端に連結されたステップモータ40によって駆動されると共に、サーボリンク50の他端に連結したプライマリプーリ11の可動円錐板11aから溝幅、つまり実プーリ比のフィードバックを受ける。
変速制御弁32は、スプール32aの変位によってプライマリプーリシリンダ室11cへの油圧の吸排を行って、ステップモータ40の駆動位置で指令された目標プーリ比となるようにプライマリ圧を調整し、実際に変速が終了するとサーボリンク50からの変位を受けてスプール32aを閉弁位置に保持する。
【0036】
減圧弁33は、セカンダリプーリシリンダ室12cへ供給される油圧(セカンダリ圧)を制御する制御弁である。
減圧弁33は、ソレノイド36を有し、CVTコントロールユニット20からの指令(例えば、デューティ信号など)に応じて、セカンダリ圧を調圧する。
【0037】
実施形態にかかるベルト式無段変速機のCVTコントロールユニット20は、セレクトレバーが走行レンジ(Dレンジ、Rレンジ)に入れられて、ベルト式無段変速機10が走行状態にされたままで車両が停車した際に、Nアイドル制御(ニュートラル制御)を実行し、Nアイドル制御の実行中に車両が再発進する際に、Nアイドル抜け制御を行うようになっている。
【0038】
Nアイドル制御は、セレクトレバーが走行レンジ(Dレンジ、Rレンジ)に入れたままで車両が停車したときに行われる制御である。
【0039】
例えば、セレクトレバーが走行レンジ(Dレンジ)に入れられたままで車両が停車状態になると、トルクコンバータ2(図1参照)は、タービンランナ2bの回転速度(タービン回転速度)Ntがゼロのストール状態になるので、エンジン1の負荷が増大し、燃料消費量が増大する。
そのため、CVTコントロールユニット20は、前後進切換え機構3の発進クラッチ3bに供給される油圧(クラッチ油圧)Pcを下げて、発進クラッチ3bをNアイドル状態にさせるNアイドル制御を実行する。
【0040】
ここで、Nアイドル状態とは、発進クラッチ3bのクラッチ板の隙間がほぼゼロで、かつ、発進クラッチ3bが伝達することのできる上限トルクであるクラッチ容量が限りなくゼロに近い状態である。
この発進クラッチ3bをNアイドル状態にするNアイドル制御が実行されると、プライマリプーリ11を回転させずにタービンランナ2bが回転して、トルクコンバータ2がストール状態から解放されるので、エンジン1の負荷が下がり、燃料消費量を低減することができる。
なお、発進クラッチは、発進時の動力伝達系路上に存在する摩擦締結要素であり、実施形態においては、前進時(Dレンジ)は発進クラッチ3b、後進時(Rレンジ)は後進ブレーキ3cである。
また、Nアイドル制御の詳細は、特開2008−75709号公報に記載されている。
【0041】
Nアイドル抜け制御は、Nアイドル制御を終了する際に行われる制御である。
CVTコントロールユニット20は、車両が停車する前の減速時に、停車後の次回の発進時に備えて、プーリ比(変速比)を最ロー側に変化させ、停車時に目標とする最ロー側のプーリ比となるように制御している。
しかし、車両の減速度が大きい場合には、目標のプーリ比に到達する前に車両が停止して、プーリ比が目標のプーリ比とは異なるプーリ比で固定されるので、車両が停車した時点でのプーリ比は、減速度に応じて異なり、常に同じ値にならない。
【0042】
そのため、Nアイドル制御が行われている状況のもとで車両が再発進する場合、Nアイドル制御を終了してそのまま通常の制御に復帰させると、車両が停車した時点のプーリ比は常に同じ値にならないので、再発進のたびに異なる大きさの締結ショックなどが発生して、運転者に違和感を与えてしまう。
よって、車両が停車した時点のプーリ比が常に同じ値にならない場合であっても、再発進時の締結ショックの大きさのバラツキを抑えるために、Nアイドル抜け制御は行われる。
【0043】
以下、Nアイドル抜け制御を詳細に説明する。
図3は、図示しないセレクトレバーが走行レンジ(Dレンジ)に入れられて、ベルト式無段変速機10が走行状態にされたままで車両が停車して、Nアイドル制御が実行されている場合におけるNアイドル抜け制御を説明するフローチャートであり、図4は、Nアイドル抜け制御を説明するタイムチャートである。
【0044】
ステップ101においてNアイドル制御が実行中であると判断されると、ステップ102において、CVTコントロールユニット20は、Nアイドル制御を終了させて通常の制御に復帰させるための条件(Nアイドル制御復帰条件)が成立したか否かを確認する。
【0045】
Nアイドル制御は、セレクトレバーが走行レンジ(Dレンジ)に入れられたままで車両が停車している時に実施されるので、CVTコントロールユニット20は、例えば、オン状態であったブレーキがオフ状態になった時点で、Nアイドル制御復帰条件が成立したと判断する。
なお、ブレーキがオフ状態になったか否かは、ブレーキスイッチ25から入力されるON/OFF信号に基づいて特定される。
【0046】
ステップ102においてNアイドル制御復帰条件が成立したと判断されると、CVTコントロールユニット20は、Nアイドル抜け制御を開始する。
これにより、前後進切換え機構3の摩擦締結要素(発進クラッチ3b)に供給される油圧と、プライマリプーリ11とセカンダリプーリ12とに供給される油圧の、Nアイドル抜け制御が並行して行われる。
【0047】
前後進切換え機構3に供給される油圧のNアイドル抜け制御では、CVTコントロールユニット20は、油圧コントロールユニット30に指令を出力して、図4に示すように、前後進切換え機構3の発進クラッチ3b(図1参照)に供給する作動油圧の指令圧(クラッチ指令圧)を、Nアイドル制御復帰条件が成立したと判断された時刻t1から時刻t3までの間、プリチャージ圧Paで保持したのち、プリチャージ圧Paよりも低い圧Pbに低下させる。そして、クラッチ指令圧を、圧Pbから所定勾配で上昇させて、発進クラッチ3bの締結・解放を行う図示しないピストンを、発進クラッチ3bを締結させる方向にストロークさせる。
【0048】
一方、プライマリプーリ11とセカンダリプーリ12とに供給される油圧のNアイドル抜け制御では、ステップ103において、CVTコントロールユニット20が、アクセル操作量センサ23から入力される信号に基づいて、アクセル開度を特定する。
【0049】
ステップ104において、CVTコントロールユニット20は、特定したアクセル開度に基づいて、目標プーリ比を設定する。
ここで、目標プーリ比は、プーリ比(変速比)が最大となる最ロー値よりもハイ側の値(変速比が小さくなる側の値)に設定される。停車後の次回の発進時のショックを抑えるためである。
【0050】
なお、実施形態では、目標プーリ比は、アクセル開度に応じて補正されるようになっており、アクセル開度が大きくなるほど、目標プーリ比の値は、ハイ側の値にシフトする。
ちなみに、図4の場合には、Nアイドル抜け制御が開始された時刻t1におけるアクセル開度はゼロなので、設定される目標プーリ比の値は、予め設定された初期値である。
【0051】
ステップ105において、CVTコントロールユニット20は、車両が停車した時のプーリ比(停車時プーリ比)と、目標プーリ比とを比較する。
なお、車両が停車したときのプーリ比は、停車直前のセカンダリプーリ回転速度Nsecを停車直前のプライマリプーリ回転速度Npriで除算することで算出される。
【0052】
そして、停車時プーリ比のほうが目標プーリ比よりも大きい(停車時プーリ比>目標プーリ比)場合、目標プーリ比は、停車時プーリ比から見てハイ側(プーリ比が小さくなる側)にあるので、ステップ106において、CVTコントロールユニット20は、再発進時に目標プーリ比を実現するために、プライマリ圧とセカンダリ圧とが、目標プーリ比を実現する圧力となるように、ステップモータ40と減圧弁33とを駆動させる。
すなわち、プライマリプーリ11のプライマリ圧と、セカンダリプーリ12のセカンダリ圧との油圧バランスを、ハイ側に指示する。
【0053】
例えば図4の場合には、時刻t2において、ステップモータ40の操作位置を現在位置よりもハイ側の位置に移動させてプライマリ圧のみを上昇させることで、停車時プーリ比よりもハイ側の目標プーリ比が与えられる油圧バランスにしている。
【0054】
ここで、Nアイドル制御の実行中には、前後進切換え機構3の発進クラッチ3bはNアイドル状態にされており、プライマリプーリ11を回転させずにタービンランナ2bのみが回転している。ベルト式無段変速機10では、プライマリプーリ11とセカンダリプーリ12とが回転することで、プライマリプーリ11の溝幅とセカンダリプーリ12の溝幅とが、それぞれプライマリ圧とセカンダリ圧とで決まる溝幅に変化して、プーリ比が決まるようになっている。
そのため、プライマリプーリ11に回転が入力されていないNアイドル抜け制御の初期の段階では、前後進切換え機構3の発進クラッチ3bが係合しておらずプライマリプーリ11に回転トルクは入力されていない。よって、プライマリ圧が上昇させられて、プライマリ圧とセカンダリ圧とが目標プーリ比を与える油圧バランスに変更された時点(時刻t2)では、実プーリ比は、車両が停車したときのプーリ比のままで変化しない。
【0055】
そして、Nアイドル抜け制御の進行により、発進クラッチ3bのクラッチ容量が増加して、プライマリプーリ11に回転トルクが入力され始めた時点(時刻t6)で、油圧バランスと釣り合う位置まで固定円錐板11b、固定円錐板12bが変位してプーリ溝幅が変更される。これにより、実プーリ比が油圧バランスと釣り合う位置までシフトして、目標プーリ比に変更される。
よって、発進クラッチ3bの締結が完了して、エンジン1の回転がプライマリプーリ11に入力される時点(時刻t8)では、目標プーリ比が達成されており、停車時のプーリ比に拘わらず常に目標プーリ比で車両の再発進が行われる。
【0056】
一方、ステップ105において、停車時のプーリ比が目標プーリ比よりも大きくない(停車時プーリ比≦目標プーリ比)場合、目標プーリ比は、停車時プーリ比から見てロー側(プーリ比が大きくなる側)にあるので、ステップ107において、CVTコントロールユニット20は、再発進時に目標プーリ比を実現するために、プライマリ圧とセカンダリ圧とが、目標プーリ比を実現する圧力となるように、ステップモータ40と減圧弁33とを駆動させる。
すなわち、プライマリプーリ11のプライマリ圧と、セカンダリプーリ12のセカンダリ圧との油圧バランスを、ロー側に指示する。
【0057】
このようにすることによっても、発進クラッチ3bのクラッチ容量が増加して、プライマリプーリ11が回転し始めた時点で、油圧バランスと釣り合う位置まで固定円錐板11b、固定円錐板12bが変位して溝幅が変更されて、プーリ比が目標プーリ比に変更される。
よって、発進クラッチ3bの締結が完了して、エンジン1の回転がプライマリプーリ11に入力された時点では、目標プーリ比が達成されており、停車時のプーリ比に拘わらず常に同じプーリ比で車両の再発進が行われる。
【0058】
そして、ステップ108において、発進クラッチ3bの締結が完了したと判定された時点で、CVTコントロールユニット20は、Nアイドル抜け制御を終了する。
【0059】
なお、発進クラッチ3bの締結が完了したと判定されるまでの間は、アクセル開度の取得から目標プーリ比の設定、油圧バランスの指示までの処理(ステップ103〜ステップ107)が繰り返し実行される。
そのため、発進クラッチの締結が完了する時刻t8までの間で、アクセル開度が変化した場合には、目標プーリ比は、アクセル開度の変化量に応じて変更される。
【0060】
例えば図4の場合、図中実線で示すように、締結が開始される前の時刻t4においてアクセル開度が大きくなっているので、目標プーリ比の値がハイ側(プーリ比が小さくなる側)に変更される。そうすると、変更後の目標プーリ比を実現するために、時刻t5において、ステップモータ40の操作位置が現在位置よりもハイ側の位置に移動させられる。
これにより、プライマリ圧のみが、アクセル開度に応じて大きくなり、プライマリ圧とセカンダリ圧の油圧バランスが、変更後の目標プーリ比を実現する油圧バランスに変更される。
よって、発進クラッチ3bのクラッチ容量が増加して、プライマリプーリ11に回転トルクが入力され始めた時点(時刻t6)で、図中実線で示すように、実プーリ比が、変更後の目標プーリ比に変更される。
【0061】
なお、前記したように目標プーリ比の値は、アクセル開度が大きくなるほどよりハイ側に変更される。
よって、図4において点線で示すように時刻t5におけるアクセル開度がより大きくなるほど、ステップモータ40の操作位置がよりハイ側に移動させられて、プライマリ圧がハイ側にシフトするので、プライマリプーリ11に回転トルクが入力され始めた時点(時刻t6)以降の実プーリ比も、プーリ比が小さくなるハイ側にシフトする。
【0062】
また、実施形態では、目標プーリ比は、プーリ比(変速比)が最大となる最ロー値よりも若干ハイ側(最大となるプーリ比よりも若干小さい値のプーリ比)に設定されているので、図4に示す車両前後Gの振れ幅h1、h2は、目標プーリ比を最ロー値とした場合(図中点線で示す)よりも、若干ハイ側の値とした場合(図中実線で示す)のほうが小さくなる。従って、発進クラッチ3bが締結されるとき(時刻t7の前後)の締結ショックが、より抑えられるようになっている。
【0063】
ちなみに、発進クラッチの締結が完了する時刻t8までの間で、アクセル開度が変化しない場合には、時刻t2において設定された目標プーリ比は変更されないので、図中一点鎖線で示すように、ステップモータ位置、プライマリ圧は、時刻t2で変更された位置、値のままで保持される。
【0064】
ここで、実施形態における発進クラッチ3b、後進ブレーキ3cが、発明における摩擦締結要素に相当し、実施形態におけるCVTコントロールユニット20および油圧コントロールユニット30で、発明における油圧制御手段が構成される。
【0065】
以上の通り、実施形態では、図1に示すように、油圧に応じて溝幅が変化する入力側のプライマリプーリ11と、油圧に応じて溝幅が変化する出力側のセカンダリプーリ12と、プライマリプーリ11とセカンダリプーリ12とに巻き掛けられ、プライマリプーリ11の回転により溝幅に応じたプーリ接触半径に変化してプーリ比を変化させるVベルト13と、エンジン1とプライマリプーリ11との間に設けられており、締結状態であるときにエンジン1からの回転をプライマリプーリ11に伝達する後進切換え機構3の発進クラッチ3bと、プライマリプーリ11とセカンダリプーリ12に作用する油圧を制御する油圧制御手段(CVTコントロールユニット20および油圧コントロールユニット30)と、を備えた車両用ベルト式無段変速機の制御装置において、油圧制御手段は、図4に示すように、車両の発進時における目標プーリ比を決定すると共に、車両が停車中で、かつ発進クラッチ3bが解放状態であるときに、停車時のプーリ比を維持したまま、プライマリプーリシリンダ室11cに作用するプライマリ圧とセカンダリプーリシリンダ室12cに作用するセカンダリ圧とを、目標プーリ比を実現する油圧バランスとし、車両の発進時に、油圧バランスを保持したままで発進クラッチ3bの締結を行う構成とした。
これにより、発進クラッチ3bが締結されてエンジン1の回転駆動力がプライマリプーリ11に入力される前に、プライマリ圧とセカンダリ圧とを、目標プーリ比を実現する油圧バランスとしておくことで、車両の発進時の発進クラッチ3bの締結が開始されたときにプライマリプーリ11に入力される捩りトルクと回転により、プーリ比がメカ的に変更されて、車両が停車して時点のプーリ比から目標のプーリ比へと速やかに収束する。
よって、車両の停車時のプーリ比(変速比)にバラツキがあった場合でも、停車後の次回の発進時におけるプーリ比を一定の値にすることができるので、発進時における発進クラッチ3bの係合ショックと、エンジン1から入力される回転駆動力とを安定させることができ、運転者に違和感を与えることを防止できる。
さらに、発進クラッチ3bの締結の進行度にかかわらず、プーリ比がメカ的に変更されるように構成されているので、発進クラッチ3bの締結の進行度を測るためのセンサ(タービン回転数センサ)を必要としないので、部品点数を削減できる。
また、タービン回転数センサを搭載していない自動変速機にも適用可能となる。
【0066】
さらに、セレクトレバーが走行レンジ(Dレンジ、Rレンジ)に入れられて、ベルト式無段変速機10が走行状態にされたままで車両が停車した場合には、Nアイドル制御が実施されているので、目標プーリ比の値を、プーリ比が最大となる最ローよりもハイ側(プーリ比が小さくなる側)の値に設定する構成とした。
ベルト式無段変速機10が走行状態にされたままで車両が停車した場合には、Nアイドル制御が行われており、このNアイドル制御を終了する際には、発進クラッチ3bを早急に締結して車両の発進性を確保するために、締結油圧が上げられている。そのため、発進クラッチ3bが締結される際の締結ショックが大きくなる傾向がある。目標プーリ比をハイ側の値にすると、発進クラッチ3bが締結された時点のプーリ比(変速比)が小さくなるので、その分だけドライブシャフトに伝達されるトルクが小さくなり、発進クラッチ3bの締結に伴うショックを抑えることができる。
また、締結ショックの低減が可能なので、さらに発進クラッチ3bの締結を早めることができるので、トルクダウン解放を前出しすることで発進性能が向上する。
【0067】
また、ブレーキペダルが離されてブレーキがオフ状態とされた時点のように、車両の再発進時における発進クラッチ3bの締結開始の直前に、プライマリ圧とセカンダリ圧とを、目標プーリ比を実現する油圧バランスとする構成とした。
これにより、プライマリプーリ11、セカンダリプーリ12、そしてVベルト13に負荷がかかる時間を短くすることができるので、耐久性の向上を図ることができる。
【0068】
さらに、アクセルペダルの踏み込み量に応じて変化するアクセル開度に応じて、目標プーリ比を補正すると共に、アクセル開度が大きいほど、目標プーリ比の値を、ハイ側(プーリ比の値が小さくなる側)に補正する構成とした。
アクセルペダルが踏み込まれてアクセル開度が大きくなると、エンジン1から入力される回転駆動力がアクセル開度に応じて大きくなると共に、発進クラッチ3bの締結速度が速くなるので、締結ショックが大きくなる。
アクセル開度の大きさに応じて目標プーリ比の値をハイ側に補正して、アップシフトの量を可変とすることで、アクセル開度が大きく、プライマリプーリ11に入力される捩れトルクが大きいときであっても締結ショックが大きくなることを防止できる。
【0069】
実施形態では、セレクトレバーの選択レンジが、前進レンジであるDレンジである場合を例に挙げて説明をしたが、選択レンジが後退レンジであるRレンジである場合にも、本発明は適用可能である。
この場合、車両の発進時には、プライマリ圧とセカンダリ圧とが目標プーリ比を実現する油圧バランスに保持されたままで、後退ブレーキ3cの締結が行なわれることになる。このようにすることによっても、実施形態の場合と同様の作用効果が奏される。
【0070】
さらに、実施形態では、プライマリ圧とセカンダリ圧の油圧バランスをハイ側に指令する場合(図3参照)の具体例として、プライマリ圧のみを上昇させる場合を例示した(図4参照)が、セカンダリ圧のみを下げることで、またはプライマリ圧とセカンダリ圧の両方を変更することで、プーリ比がハイ側にシフトするようにしても良い。
【0071】
また、実施形態では、オン状態であったブレーキがオフ状態となった場合に、Nアイドル制御復帰条件が成立していると判断する構成としたが、アクセルペダルが踏み込まれてアクセル開度が閾値よりも大きくなった場合や、図示しないパーキングブレーキがオフ状態となった場合のように、車両の発進に関与する機器の出力信号から車両が発進するか否かを判断することで、Nアイドル制御復帰条件が成立しているか否かを判断するようにしても良い。
【符号の説明】
【0072】
1 エンジン
2 トルクコンバータ
3 前後進切換え機構
3b 発進クラッチ
3c 後進ブレーキ
4 ディファレンシャル
10 ベルト式無段変速機
11 プライマリプーリ
12 セカンダリプーリ
13 Vベルト(ベルト)
14 アイドラギア
20 CVTコントロールユニット
20a 変速制御部
20b プーリ圧制御部
21 エンジンコントロールユニット
22 インヒビタスイッチ
23 アクセル操作量センサ
24 油温センサ
25 ブレーキスイッチ
26 プライマリプーリ回転速度センサ
27 セカンダリプーリ回転速度センサ
28 ステップモータ位置センサ
29a、29b 油圧センサ
30 油圧コントロールユニット
31 調圧弁
32 変速制御弁
33 減圧弁
34 油圧ポンプ
35 ソレノイド
36 ソレノイド
40 ステップモータ
50 サーボリンク
【特許請求の範囲】
【請求項1】
油圧に応じて溝幅が変化する入力側のプライマリプーリと、
油圧に応じて溝幅が変化する出力側のセカンダリプーリと、
前記プライマリプーリと前記セカンダリプーリとに巻き掛けられ、前記プライマリプーリの回転時に前記溝幅に応じたプーリ接触半径に変化してプーリ比を変化させるベルトと、
エンジンと前記プライマリプーリとの間に設けられており、締結状態であるときに前記エンジンからの回転を前記プライマリプーリに伝達する摩擦締結要素と、
前記プライマリプーリと前記セカンダリプーリに作用する油圧を制御する油圧制御手段と、を備えた車両用ベルト式無段変速機の制御装置において、
前記油圧制御手段は、車両の発進時における目標プーリ比を決定すると共に、前記車両が停車中で、かつ前記摩擦締結要素が解放状態であるときに、停車時のプーリ比を維持したまま、プライマリプーリに作用する油圧とセカンダリプーリに作用する油圧とを、前記目標プーリ比を実現する油圧バランスとし、前記車両の発進時に、前記油圧バランスを保持したままで前記摩擦締結要素の締結を行うことを特徴とする車両用ベルト式無段変速機の制御装置。
【請求項2】
前記油圧制御手段は、前記車両用ベルト式無段変速機が走行状態にされたままで前記車両が停車中である場合には、前記目標プーリ比を、最ローよりもハイ側のプーリ比に設定することを特徴とする請求項1に記載の車両用ベルト式無段変速機の制御装置。
【請求項3】
前記油圧制御手段は、前記車両の発進時における前記摩擦締結要素の締結開始の直前に、前記プライマリプーリに作用する油圧と前記セカンダリプーリに作用する油圧とを、前記目標プーリ比を実現する油圧バランスとすることを特徴とする請求項2に記載の車両用ベルト式無段変速機の制御装置。
【請求項4】
前記油圧制御手段は、アクセル開度に応じて前記目標プーリ比を補正すると共に、前記アクセル開度が大きいほど、目標プーリ比をハイ側に補正することを特徴とする請求項3に記載の車両用ベルト式無段変速機の制御装置。
【請求項1】
油圧に応じて溝幅が変化する入力側のプライマリプーリと、
油圧に応じて溝幅が変化する出力側のセカンダリプーリと、
前記プライマリプーリと前記セカンダリプーリとに巻き掛けられ、前記プライマリプーリの回転時に前記溝幅に応じたプーリ接触半径に変化してプーリ比を変化させるベルトと、
エンジンと前記プライマリプーリとの間に設けられており、締結状態であるときに前記エンジンからの回転を前記プライマリプーリに伝達する摩擦締結要素と、
前記プライマリプーリと前記セカンダリプーリに作用する油圧を制御する油圧制御手段と、を備えた車両用ベルト式無段変速機の制御装置において、
前記油圧制御手段は、車両の発進時における目標プーリ比を決定すると共に、前記車両が停車中で、かつ前記摩擦締結要素が解放状態であるときに、停車時のプーリ比を維持したまま、プライマリプーリに作用する油圧とセカンダリプーリに作用する油圧とを、前記目標プーリ比を実現する油圧バランスとし、前記車両の発進時に、前記油圧バランスを保持したままで前記摩擦締結要素の締結を行うことを特徴とする車両用ベルト式無段変速機の制御装置。
【請求項2】
前記油圧制御手段は、前記車両用ベルト式無段変速機が走行状態にされたままで前記車両が停車中である場合には、前記目標プーリ比を、最ローよりもハイ側のプーリ比に設定することを特徴とする請求項1に記載の車両用ベルト式無段変速機の制御装置。
【請求項3】
前記油圧制御手段は、前記車両の発進時における前記摩擦締結要素の締結開始の直前に、前記プライマリプーリに作用する油圧と前記セカンダリプーリに作用する油圧とを、前記目標プーリ比を実現する油圧バランスとすることを特徴とする請求項2に記載の車両用ベルト式無段変速機の制御装置。
【請求項4】
前記油圧制御手段は、アクセル開度に応じて前記目標プーリ比を補正すると共に、前記アクセル開度が大きいほど、目標プーリ比をハイ側に補正することを特徴とする請求項3に記載の車両用ベルト式無段変速機の制御装置。
【図1】


【図2】
【図3】
【図4】
【図2】
【図3】
【図4】
【公開番号】特開2010−180892(P2010−180892A)
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願番号】特願2009−22169(P2009−22169)
【出願日】平成21年2月3日(2009.2.3)
【出願人】(000231350)ジヤトコ株式会社 (899)
【Fターム(参考)】
【公開日】平成22年8月19日(2010.8.19)
【国際特許分類】
【出願日】平成21年2月3日(2009.2.3)
【出願人】(000231350)ジヤトコ株式会社 (899)
【Fターム(参考)】
[ Back to top ]