
車両用モータ駆動装置および自動車
【課題】2ウェイローラクラッチを用いた車両用モータ駆動装置において、アクセルペダルを踏み込んだ状態からアクセルペダルを戻し、その後、再びアクセルペダルを踏み込んだときの振動・異音を防止する。
【解決手段】電動モータ3の回転が入力される入力軸7と、入力軸7に設けられた1速入力ギヤ9Aおよび2速入力ギヤ9Bと、1速入力ギヤ9Aおよび2速入力ギヤ9Bにそれぞれ噛合する1速出力ギヤ10Aおよび2速出力ギヤ10Bと、1速の2ウェイローラクラッチ16Aと、2速の2ウェイローラクラッチ16Bと、電動モータ3のモータトルク制御装置59とを設け、モータトルク制御装置59は、アクセルペダル61が踏み込まれていないときに現変速段の2ウェイローラクラッチ16Aを係合位置に保持するトルクを電動モータ3で発生する制御を実行する。
【解決手段】電動モータ3の回転が入力される入力軸7と、入力軸7に設けられた1速入力ギヤ9Aおよび2速入力ギヤ9Bと、1速入力ギヤ9Aおよび2速入力ギヤ9Bにそれぞれ噛合する1速出力ギヤ10Aおよび2速出力ギヤ10Bと、1速の2ウェイローラクラッチ16Aと、2速の2ウェイローラクラッチ16Bと、電動モータ3のモータトルク制御装置59とを設け、モータトルク制御装置59は、アクセルペダル61が踏み込まれていないときに現変速段の2ウェイローラクラッチ16Aを係合位置に保持するトルクを電動モータ3で発生する制御を実行する。
【発明の詳細な説明】
【技術分野】
【0001】
この発明は、電動モータの回転を変速して車輪へ伝達する車両用モータ駆動装置およびそのモータ駆動装置を搭載した自動車に関する。
【背景技術】
【0002】
電気自動車およびハイブリッド自動車の駆動装置に用いられる車両用モータ駆動装置として、電動モータと、その電動モータの回転を変速する変速機と、その変速機から出力された回転を左右の車輪に分配するディファレンシャルギヤとからなるものが従来から知られている。
【0003】
この車両用モータ駆動装置を使用すると、走行条件に応じて変速機の変速比を切り換えることにより、駆動および回生時において、効率の高い回転数およびトルク領域で電動モータを使用することが可能となる。また、適切な変速比とすることで、高速走行時の変速機の回転部材の回転速度が下がり、変速機の動力損失が低減して車両のエネルギ効率を向上させることができる。
【0004】
このような車両用モータ駆動装置として、例えば特許文献1に記載のものが知られている。特許文献1に記載の車両用モータ駆動装置は、変速比の異なる2つの回転伝達経路にそれぞれ設けられた摩擦クラッチと、その摩擦クラッチを選択的に係合させる変速アクチュエータを有する。
【0005】
ここで、摩擦クラッチは、回転伝達経路の上流側に接続されたプレッシャプレートと、回転伝達経路の下流側に接続されたクラッチプレートとを軸方向に対向して配置したものであり、プレッシャプレートがクラッチプレートから離反した状態では回転の伝達が遮断され、プレッシャプレートをクラッチプレートに接触させると、その接触面間の摩擦力を介して回転が伝達される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−223298号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、本願発明の発明者らは、変速比の異なる2つの回転伝達経路を切り換えるクラッチとして、上記の摩擦クラッチではなく、2ウェイローラクラッチを用いた車両用モータ駆動装置を検討し、そのような車両用モータ駆動装置として以下の構成のものを考案した。
【0008】
電動モータと、その電動モータの回転が入力される入力軸と、入力軸に対して間隔をおいて平行に配置された出力軸と、入力軸に設けられた1速入力ギヤおよび2速入力ギヤと、出力軸に設けられ、1速入力ギヤおよび2速入力ギヤにそれぞれ噛合する1速出力ギヤおよび2速出力ギヤと、出力軸の回転を左右の車輪に分配するディファレンシャルギヤとを有し、
1速出力ギヤと2速出力ギヤは軸受を介して出力軸で回転可能に支持され、
1速出力ギヤと出力軸との間でトルクの伝達と遮断の切換えを行なう1速の2ウェイローラクラッチと、2速出力ギヤと出力軸との間でトルクの伝達と遮断の切換えを行なう2速の2ウェイローラクラッチと、1速の2ウェイローラクラッチと2速の2ウェイローラクラッチとを選択的に係合させる変速アクチュエータを設けた車両用モータ駆動装置。
【0009】
ここで、1速の2ウェイローラクラッチは、1速出力ギヤの内周と出力軸の外周のうち一方に設けられた円筒面と、他方に設けられたカム面と、そのカム面と円筒面の間に組み込まれたローラと、そのローラを保持し、カム面と円筒面の間にローラを係合させる係合位置とローラの係合を解除する中立位置との間で出力軸に対して相対回転可能に設けられた1速保持器と、その1速保持器を中立位置に弾性保持する1速スイッチばねとからなる構成のものであり、1速保持器を係合位置と中立位置の間で周方向に移動させることにより、トルクの伝達と遮断を切り換えることができるようになっている。2速の2ウェイローラクラッチも、1速の2ウェイローラクラッチと同様の構成である。
【0010】
また、変速アクチュエータは、1速保持器に対して回り止めされかつ1速出力ギヤの側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた1速摩擦板と、その1速摩擦板を1速出力ギヤの側面から離反する方向に付勢する1速離反ばねと、2速保持器に対して回り止めされかつ2速出力ギヤの側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた2速摩擦板と、その2速摩擦板を2速出力ギヤの側面から離反する方向に付勢する2速離反ばねと、1速摩擦板を押圧して1速出力ギヤの側面に接触させる1速シフト位置と2速摩擦板を押圧して2速出力ギヤの側面に接触させる2速シフト位置との間で軸方向に移動可能に設けられたシフトリングと、そのシフトリングを軸方向に移動させるシフト機構とからなる。
【0011】
上記構成からなる車両用モータ駆動装置は、シフト機構の作動により、シフトリングを1速シフト位置に移動させたときは、1速摩擦板が1速出力ギヤの側面に接触し、その接触面間の摩擦力によって1速摩擦板が出力軸に対して相対回転し、この1速摩擦板に回り止めされた1速保持器が1速スイッチばねの弾性力に抗して中立位置から係合位置に移動するので、1速保持器に保持されたローラがカム面と円筒面の間に係合し、1速出力ギヤと出力軸との間でトルクの伝達が行われる。同様に、シフトリングを2速シフト位置に移動させたときは、2速保持器に保持されたローラがカム面と円筒面の間に係合し、2速出力ギヤと出力軸との間でトルクの伝達が行われる。
【0012】
ところで、この発明の発明者は、上記構成の車両用モータ駆動装置を採用した場合、1速の2ウェイローラクラッチまたは2速の2ウェイローラクラッチのローラがカム面と円筒面の間に係合した状態において、アクセルペダルを踏み込んだ状態からアクセルペダルを戻し、その後、再びアクセルペダルを踏み込んだときに、不快な振動・異音が発生するおそれがある問題を見出した。この問題を以下に説明する。
【0013】
例えば、1速の2ウェイローラクラッチが係合した状態において、アクセルペダルを踏み込んだ状態からアクセルペダルを戻すと、アクセル操作量の減少に伴って電動モータの発生するトルクが小さくなるので、電動モータから1速出力ギヤと1速摩擦板とを介して1速保持器に伝達するトルクが1速スイッチばねの弾性力よりも小さくなり、その結果、1速スイッチばねの弾性力により1速保持器が係合位置から中立位置に移動し、1速の2ウェイローラクラッチの係合が解除される。
【0014】
その後、再びアクセルペダルを踏み込むと、アクセル操作量の増大に伴って電動モータの発生するトルクが大きくなるので、電動モータから1速出力ギヤと1速摩擦板とを介して1速保持器に伝達するトルクが1速スイッチばねの弾性力よりも大きくなり、そのトルクにより1速保持器が1速スイッチばねの弾性力に抗して中立位置から係合位置に移動し、1速の2ウェイローラクラッチのローラがカム面と円筒面の間に再び係合し、このローラが再係合する衝撃により不快な振動・異音が発生するおそれがある。
【0015】
同様に、2速の2ウェイローラクラッチが係合した状態においても、アクセルペダルを踏み込んだ状態からアクセルペダルを戻すと、2速スイッチばねの弾性力により2速保持器が係合位置から中立位置に移動し、2速の2ウェイローラクラッチの係合が解除され、その後、再びアクセルペダルを踏み込んだときに、2速の2ウェイローラクラッチのローラが再係合するので、この再係合の衝撃により不快な振動・異音が発生するおそれがある。
【0016】
この発明が解決しようとする課題は、2ウェイローラクラッチを用いた車両用モータ駆動装置において、アクセルペダルを踏み込んだ状態からアクセルペダルを戻し、その後、再びアクセルペダルを踏み込んだときの振動・異音を防止することである。
【課題を解決するための手段】
【0017】
上記の課題を解決するため、この発明においては、電動モータと、その電動モータの回転が入力される入力軸と、前記入力軸に対して間隔をおいて平行に配置された出力軸と、前記入力軸に設けられた第1入力ギヤおよび第2入力ギヤと、前記出力軸に設けられ、前記第1入力ギヤおよび第2入力ギヤにそれぞれ噛合する第1出力ギヤおよび第2出力ギヤと、前記出力軸の回転を左右の車輪に分配するディファレンシャルギヤと、前記電動モータの発生トルクを制御するモータトルク制御装置とを有し、
前記第1入力ギヤと第2入力ギヤと入力軸の組と、前記第1出力ギヤと第2出力ギヤと出力軸の組とのうち一方を、第1クラッチギヤと第2クラッチギヤとこれらのクラッチギヤを軸受を介して回転可能に支持するクラッチギヤ支持軸とし、
前記第1クラッチギヤとクラッチギヤ支持軸との間でトルクの伝達と遮断の切換えを行なう第1の2ウェイローラクラッチと、前記第2クラッチギヤとクラッチギヤ支持軸との間でトルクの伝達と遮断の切換えを行なう第2の2ウェイローラクラッチと、前記第1の2ウェイローラクラッチと第2の2ウェイローラクラッチとを選択的に係合させる変速アクチュエータを設け、
前記第1の2ウェイローラクラッチは、第1クラッチギヤの内周とクラッチギヤ支持軸の外周のうち一方に設けられた円筒面と、他方に設けられたカム面と、そのカム面と前記円筒面の間に組み込まれたローラと、そのローラを保持し、前記カム面と円筒面の間にローラを係合させる係合位置とローラの係合を解除する中立位置との間で前記クラッチギヤ支持軸に対して相対回転可能に設けられた第1保持器と、その第1保持器を前記中立位置に弾性保持する第1スイッチばねとからなり、
前記第2の2ウェイローラクラッチは、第2クラッチギヤの内周とクラッチギヤ支持軸の外周のうち一方に設けられた円筒面と、他方に設けられたカム面と、そのカム面と前記円筒面の間に組み込まれたローラと、そのローラを保持し、前記カム面と円筒面の間にローラを係合させる係合位置とローラの係合を解除する中立位置との間で前記クラッチギヤ支持軸に対して相対回転可能に設けられた第2保持器と、その第2保持器を前記中立位置に弾性保持する第2スイッチばねとからなり、
前記変速アクチュエータは、前記第1保持器に対して回り止めされかつ前記第1クラッチギヤの側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた第1摩擦板と、その第1摩擦板を前記第1クラッチギヤの側面から離反する方向に付勢する第1離反ばねと、前記第2保持器に対して回り止めされかつ前記第2クラッチギヤの側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた第2摩擦板と、その第2摩擦板を前記第2クラッチギヤの側面から離反する方向に付勢する第2離反ばねと、前記第1摩擦板を押圧して前記第1クラッチギヤの側面に接触させる第1シフト位置と前記第2摩擦板を押圧して前記第2クラッチギヤの側面に接触させる第2シフト位置との間で軸方向に移動可能に設けられたシフトリングと、そのシフトリングを軸方向に移動させるシフト機構とからなり、
前記モータトルク制御装置は、アクセルペダルが踏み込まれているか否かを判定するアクセル操作判定手段と、そのアクセル操作判定手段でアクセルペダルが踏み込まれていないと判定されたときに、現変速段の2ウェイローラクラッチの保持器を係合位置から中立位置に戻そうとする前記スイッチばねの弾性力に抗して現変速段の2ウェイローラクラッチの保持器を係合位置に保持するトルクを前記電動モータで発生するローラ係合保持制御を実行するローラ係合保持制御手段とを有する構成を車両用モータ駆動装置に採用した。
【0018】
この構成を採用した車両用モータ駆動装置は、シフトリングが第1シフト位置にあるときは、第1摩擦板が第1クラッチギヤの側面に接触し、その接触面間の摩擦力によって第1摩擦板がクラッチギヤ支持軸に対して相対回転し、この第1摩擦板に回り止めされた第1保持器が第1スイッチばねの弾性力に抗して中立位置から係合位置に移動するので、第1保持器に保持されたローラがカム面と円筒面の間に係合し、第1クラッチギヤとクラッチギヤ支持軸との間でトルクの伝達が行われる。
【0019】
そして、上記構成の車両用モータ駆動装置を採用した場合、第1の2ウェイローラクラッチが係合した状態において、アクセルペダルを踏み込んだ状態からアクセルペダルを戻すと、アクセル操作量の減少に伴って電動モータの発生するトルクが小さくなるが、前記アクセル操作判定手段でアクセルペダルが踏み込まれていないと判定されたときに、前記ローラ係合保持制御手段が、第1保持器を係合位置から中立位置に戻そうとする第1スイッチばねの弾性力に抗して第1保持器を係合位置に保持するトルクを前記電動モータで発生するローラ係合保持制御を実行するので、第1保持器が係合位置から中立位置に移動せず、第1の2ウェイローラクラッチの係合が保持される。第2の2ウェイローラクラッチが係合した状態においても同様である。このように、アクセルペダルを戻してから再びアクセルペダルを踏み込むまでの一連の動作の間、現変速段の2ウェイローラクラッチの係合が解除されないので、ローラの再係合による振動・異音が発生しない。
【0020】
前記モータトルク制御装置は、ブレーキペダルが踏み込まれているか否かを問わず、前記ローラ係合保持制御を実行するように構成することも可能であるが、前記モータトルク制御装置は、運転者のブレーキ操作量が予め設定されたしきい値よりも大きいか否かを判定するブレーキ操作判定手段を更に設け、前記ローラ係合保持制御手段は、そのブレーキ操作判定手段で運転者のブレーキ操作量が前記しきい値よりも大きいと判定されたときに前記ローラ係合保持制御を解除するように構成すると好ましい。このようにすると、ブレーキペダルが踏み込まれたときに、ローラ係合保持制御によるトルクの発生を中止するので速やかに減速することが可能となり、安全性を高めることができる。
【0021】
また、前記モータトルク制御装置に、ブレーキペダルが踏み込まれているか否か判定するブレーキ操作判定手段を更に設け、前記ローラ係合保持制御手段は、そのブレーキ操作判定手段でブレーキペダルが踏み込まれていると判定されたときに前記ローラ係合保持制御を解除するように構成してもよい。このようにしても、ブレーキペダルが踏み込まれたときに、ローラ係合保持制御によるトルクの発生を中止するので速やかに減速することが可能となり、安全性を高めることができる。
【0022】
前記ローラ係合保持制御手段は、前記ローラ係合保持制御により前記電動モータで発生するトルクの大きさを車速によらず一定とすることも可能である。このようにした場合、車速が遅い状態においてアクセルペダルの踏み込みを解除し、前記ローラ係合保持制御が実行されたときは、車両の走行抵抗が小さいので、車両の走行抵抗と車両駆動力(すなわち前記ローラ係合保持制御により電動モータが発生するトルク)の差が小さく、車両の速度を維持することができる。しかしながら、車速が速い状態においてアクセルペダルの踏み込みを解除し、前記ローラ係合保持制御が実行されたときは、車両の走行抵抗が大きいので、車両の走行抵抗が車両駆動力を大きく上回ってしまい、車両が減速しやすくなる。その結果、減速した車速を元に戻そうと運転者がアクセルペダルを踏み込むので、無駄な電気が消費される。
【0023】
そこで、前記ローラ係合保持制御により前記電動モータで発生するトルクの大きさは、車速が速いほど大きくなるように設定すると好ましい。このようにすると、車速が速いときは、前記ローラ係合保持制御により電動モータが発生するトルクも大きくなるので、車速が速い状態においてアクセルペダルの踏み込みを解除して前記ローラ係合保持制御が実行されたときに、車両の走行抵抗と車両駆動力の差を小さく抑えることができ、車両の速度を維持しやすくなる。その結果、運転者が無駄にアクセルペダルを踏み込むのを抑制することができ、電気消費量を抑えることが可能となる。
【0024】
また、前記ローラ係合保持制御により前記電動モータで発生するトルクの大きさは、変速段に応じて設定することができる。このようにすると、前記ローラ係合保持制御が実行されるときの変速段にかかわらず、前記ローラ係合保持制御により電動モータで発生するトルクの大きさを最適な大きさに調整することができる。
【0025】
また、この発明では、上記の車両用モータ駆動装置を用いた電気自動車として、左右一対の前輪と左右一対の後輪のうち少なくとも一方を上記の車両用モータ駆動装置で駆動するようにした電気自動車を提供する。
【0026】
また、この発明では、上記の車両用モータ駆動装置を用いたハイブリッド自動車として、左右一対の前輪と左右一対の後輪のうち一方をエンジンで駆動し、他方を上記の車両用モータ駆動装置で駆動するようにしたハイブリッド自動車を提供する。
【発明の効果】
【0027】
この発明の車両用モータ駆動装置を採用すると、アクセルペダルを踏み込んだ状態からアクセルペダルを戻したときに、電動モータが、現変速段の保持器を係合位置から中立位置に戻そうとするスイッチばねの弾性力に抗して現変速段の保持器を係合位置に保持するトルクを発生するので、現変速段の保持器が係合位置から中立位置に移動せず、現変速段の2ウェイローラクラッチの係合が保持される。したがって、アクセルペダルを戻してから再びアクセルペダルを踏み込んだときに、ローラの再係合による振動・異音が発生しない。
【図面の簡単な説明】
【0028】
【図1】この発明に係る車両用モータ駆動装置を採用した電気自動車の概略図
【図2】この発明に係る車両用モータ駆動装置を採用したハイブリッド自動車の概略図
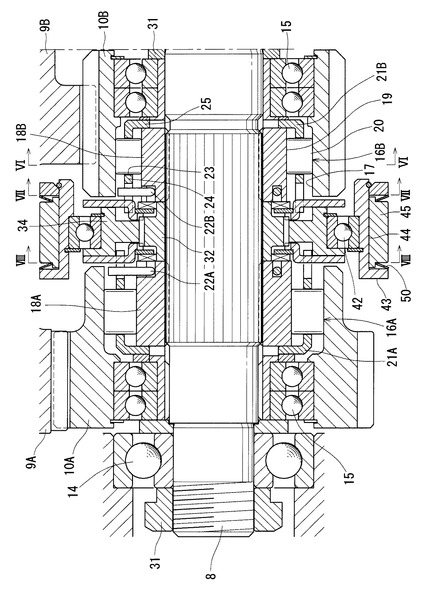
【図3】この発明に係る車両用モータ駆動装置の断面図
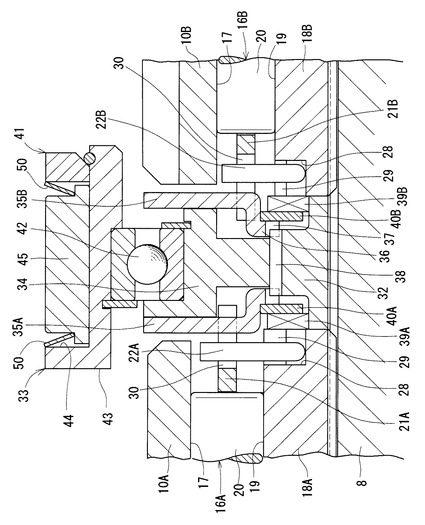
【図4】図3の1速出力ギヤおよび2速出力ギヤ近傍の拡大断面図
【図5】図4のシフトリング近傍の拡大断面図
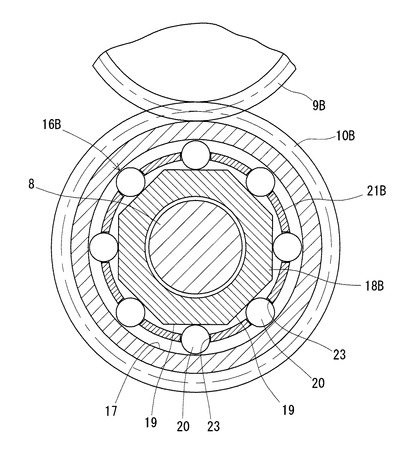
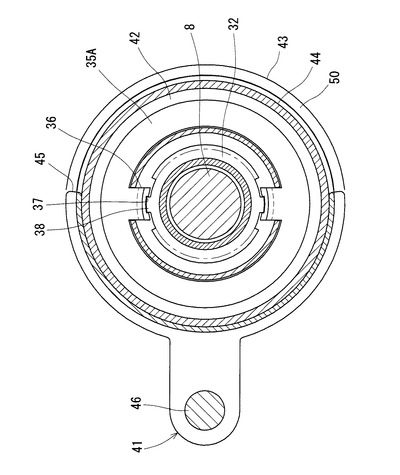
【図6】図4のVI−VI線に沿った断面図
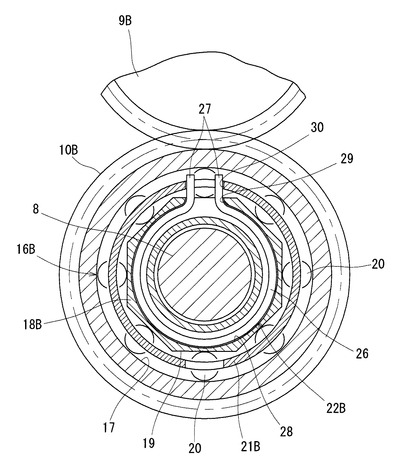
【図7】図4のVII−VII線に沿った断面図
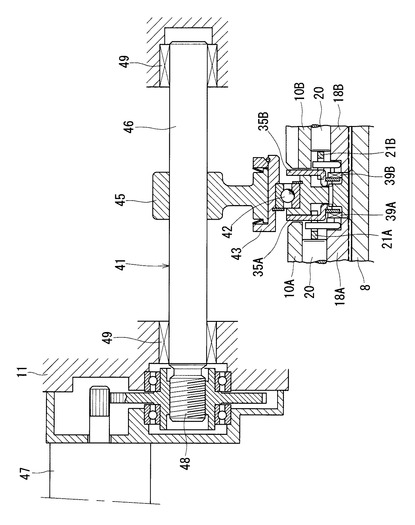
【図8】図4のVIII−VIII線に沿った断面図
【図9】シフト機構を示す断面図
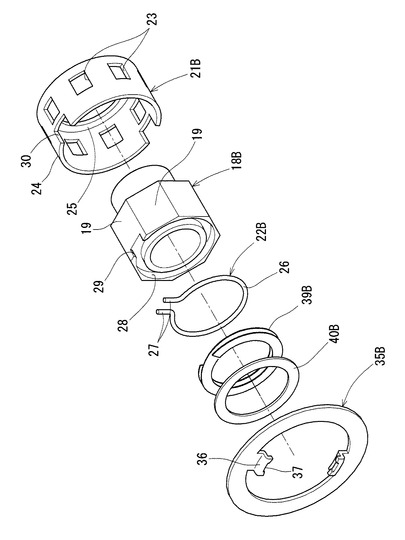
【図10】図4の2速カム部材近傍の分解斜視図
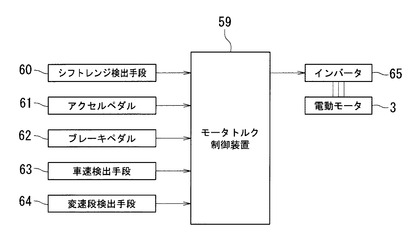
【図11】図3に示す電動モータのモータトルク制御装置のブロック図
【図12】図11に示すモータトルク制御装置の制御を示すフロー図
【図13】図12に示すローラ係合保持制御を実行したときに電動モータで発生するトルクと、車速との対応関係を示す図
【発明を実施するための形態】
【0029】
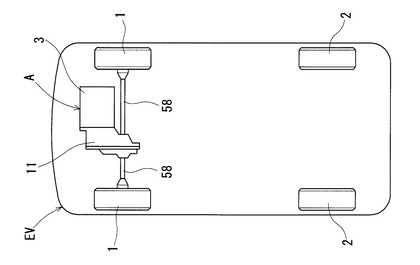
図1は、左右一対の前輪1をこの発明に係る車両用モータ駆動装置Aで駆動される駆動輪とし、左右一対の後輪2を従動輪とした電気自動車EVを示す。
【0030】
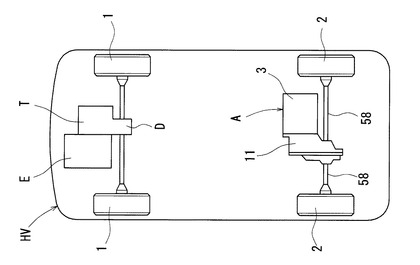
図2は、左右一対の前輪1をエンジンEによって駆動される主駆動輪とし、左右一対の後輪2をこの発明に係る車両用モータ駆動装置Aで駆動される補助駆動輪としたハイブリッド自動車HVを示す。ハイブリッド自動車HVには、エンジンEの回転を変速するトランスミッションTと、トランスミッションTから出力された回転を左右の前輪1に分配するディファレンシャルギヤDとが設けられている。
【0031】
この電気自動車EVおよびハイブリッド自動車HVに組み込まれたこの発明に係る車両用モータ駆動装置Aについて以下に説明する。
【0032】
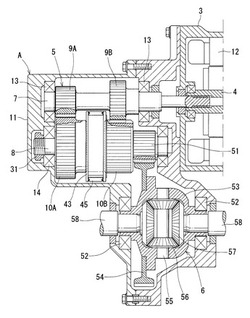
図3に示すように、車両用モータ駆動装置Aは、電動モータ3と、電動モータ3のモータ軸4の回転を変速して出力する変速機5と、その変速機5から出力された回転を図1に示す電気自動車EVの左右一対の前輪1に分配し、または、図2に示すハイブリッド自動車HVの左右一対の後輪2に分配するディファレンシャルギヤ6とを有する。
【0033】
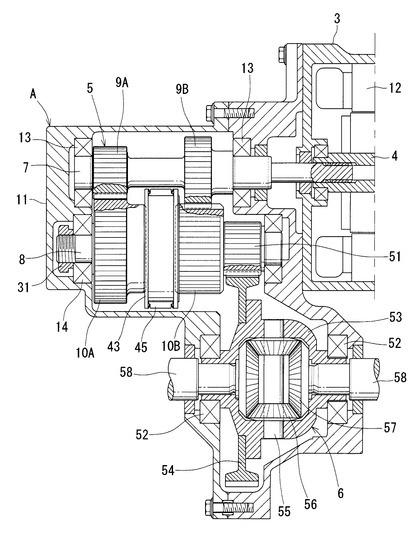
変速機5は、図3に示すように、モータ軸4の回転が入力される入力軸7と、入力軸7に対して間隔をおいて平行に配置された出力軸8と、入力軸7に設けられた1速入力ギヤ9Aおよび2速入力ギヤ9Bと、出力軸8に設けられた1速出力ギヤ10Aおよび2速出力ギヤ10Bとを有する。
【0034】
モータ軸4は、入力軸7と同軸上に直列に配置されており、ハウジング11に固定された電動モータ3のステータ12で回転駆動される。入力軸7は、ハウジング11内に組込まれた対向一対の軸受13により回転可能に支持され、入力軸7の軸端はスプライン嵌合によってモータ軸4に接続されている。出力軸8は、ハウジング11内に組込まれた対向一対の軸受14により回転可能に支持されている。
【0035】
1速入力ギヤ9Aと2速入力ギヤ9Bは軸方向に間隔をおいて配置され、入力軸7を中心として入力軸7と一体に回転するように入力軸7に固定されている。1速出力ギヤ10Aと2速出力ギヤ10Bも軸方向に間隔をおいて配置されている。
【0036】
図4に示すように、1速出力ギヤ10Aは、出力軸8を貫通させる環状に形成され、軸受15を介して出力軸8で支持されており、出力軸8を中心として出力軸8に対して回転可能となっている。同様に、2速出力ギヤ10Bも、軸受15を介して出力軸8で回転可能に支持されている。
【0037】
1速入力ギヤ9Aと1速出力ギヤ10Aは互いに噛合しており、その噛合によって1速入力ギヤ9Aと1速出力ギヤ10Aの間で回転が伝達するようになっている。2速入力ギヤ9Bと2速出力ギヤ10Bも噛合しており、その噛合によって2速入力ギヤ9Bと2速出力ギヤ10Bの間で回転が伝達するようになっている。2速入力ギヤ9Bと2速出力ギヤ10Bの減速比は、1速入力ギヤ9Aと1速出力ギヤ10Aの減速比よりも小さい。
【0038】
1速出力ギヤ10Aと出力軸8の間には、1速出力ギヤ10Aと出力軸8の間でトルクの伝達と遮断の切換えを行なう1速の2ウェイローラクラッチ16Aが組込まれている。また、2速出力ギヤ10Bと出力軸8の間には、2速出力ギヤ10Bと出力軸8の間でトルクの伝達と遮断の切換えを行なう2速の2ウェイローラクラッチ16Bが組込まれている。
【0039】
1速の2ウェイローラクラッチ16Aと2速の2ウェイローラクラッチ16Bは、左右対称の同一構成なので、2速の2ウェイローラクラッチ16Bを以下に説明し、1速の2ウェイローラクラッチ16Aについては、2速の2ウェイローラクラッチ16Bに対応する部分に同一の符号または末尾のアルファベットBをAに置き換えた符号を付して説明を省略する。
【0040】
図5〜図7に示すように、2速の2ウェイローラクラッチ16Bは、2速出力ギヤ10Bの内周に設けられた円筒面17と、出力軸8の外周に回り止めした環状の2速カム部材18Bに形成されたカム面19と、カム面19と円筒面17の間に組み込まれたローラ20と、ローラ20を保持する2速保持器21Bと、2速スイッチばね22Bとからなる。カム面19は、円筒面17との間で周方向中央から周方向両端に向かって次第に狭くなるくさび形空間を形成するような面であり、例えば、図6に示すように円筒面17と対向する平坦面である。
【0041】
図4、図10に示すように、2速保持器21Bは、ローラ20を収容する複数のポケット23が周方向に間隔をおいて形成された円筒部24と、円筒部24の一端から径方向内方に延び出す内向きフランジ部25とを有する。内向きフランジ部25の径方向内端は、2速カム部材18Bの外周で周方向にスライド可能に支持され、この周方向のスライドによって、2速保持器21Bは、カム面19と円筒面17の間にローラ20を係合させる係合位置とローラ20の係合を解除する中立位置との間で出力軸8に対して相対回転可能となっている。また、2速保持器21Bの内向きフランジ部25は軸方向両側への移動が規制され、これにより2速保持器21Bが軸方向に非可動とされている。
【0042】
図6に示すように、各カム面19は、回転中心を含む仮想平面に対して対称に形成され、これにより、各カム面19と円筒面17の間に配置されたローラ20は、正転方向と逆転方向の両方向で係合可能となっている。すなわち、電動モータ3が発生するトルクにより車両を前進させるときは、2速保持器21Bを出力軸8に対して正転方向に相対回転させることにより、2速保持器21Bに保持されたローラ20を、カム面19と円筒面17の間の正転方向側の狭小空間に係合させ、そのローラ20を介して2速出力ギヤ9Bと出力軸8の間で正転方向のトルクを伝達することが可能となっており、一方、電動モータ3が発生するトルクにより車両を後退させるときは、2速保持器21Bを出力軸8に対して逆転方向に相対回転させることにより、2速保持器21Bに保持されたローラ20を、カム面19と円筒面17の間の逆転方向側の狭小空間に係合させ、そのローラ20を介して2速出力ギヤ9Bと出力軸8の間で逆転方向のトルクを伝達することが可能となっている。
【0043】
図7、図10に示すように、2速スイッチばね22Bは、鋼線をC形に巻いたC形環状部26と、C形環状部26の両端からそれぞれ径方向外方に延出する一対の延出部27,27とからなる。C形環状部26は、2速カム部材18Bの軸方向端面に形成された円形のスイッチばね収容凹部28に嵌め込まれ、一対の延出部27,27は、2速カム部材18Bの軸方向端面に形成された径方向溝29に挿入されている。
【0044】
径方向溝29は、スイッチばね収容凹部28の内周縁から径方向外方に延びて2速カム部材18Bの外周に至るように形成されている。2速スイッチばね22Bの延出部27は、径方向溝29の径方向外端から突出しており、その延出部27の径方向溝29からの突出部分が、2速保持器21Bの円筒部24の軸方向端部に形成された切欠き30に挿入されている。径方向溝29と切欠き30は同じ幅に形成されている。
【0045】
延出部27,27は、径方向溝29の周方向で対向する内面と、切欠き30の周方向で対向する内面にそれぞれ接触しており、その接触面に作用する周方向の力によって2速保持器21Bを中立位置に弾性保持している。
【0046】
すなわち、2速保持器21Bを出力軸8に対して相対回転させて、図7に示す中立位置から周方向に移動させると、径方向溝29の位置と切欠き30の位置が周方向にずれるので、一対の延出部27,27の間隔が狭まる方向にC形環状部26が弾性変形し、その弾性復元力によって2速スイッチばね22Bの一対の延出部27,27が径方向溝29の内面と切欠き30の内面を押圧し、その押圧によって2速保持器21Bを中立位置に戻す方向の力が作用するようになっている。
【0047】
図4に示すように、1速カム部材18Aと2速カム部材18Bの出力軸8に対する回り止めは、スプライン嵌合によって行なわれている。1速カム部材18Aのカム面19と2速カム部材18Bのカム面19は同数かつ同位相となっている。また、1速カム部材18Aと2速カム部材18Bは、出力軸8の外周に嵌合した一対の止め輪31によって軸方向に非可動となっている。1速カム部材18Aと2速カム部材18Bの間には間座32が組み込まれている。
【0048】
1速の2ウェイローラクラッチ16Aと2速の2ウェイローラクラッチ16Bは、変速アクチュエータ33により選択的に係合することができるようになっている。
【0049】
図5に示すように、変速アクチュエータ33は、1速出力ギヤ10Aと2速出力ギヤ10Bの間に軸方向に移動可能に設けられたシフトリング34と、1速出力ギヤ10Aとシフトリング34の間に組み込まれた1速摩擦板35Aと、2速出力ギヤ10Bとシフトリング34の間に組み込まれた2速摩擦板35Bとを有する。
【0050】
ここで、1速摩擦板35Aと2速摩擦板35Bは、左右対称の同一構成なので、2速摩擦板35Bを以下に説明し、1速摩擦板35Aについては、2速摩擦板35Bに対応する部分に同一の符号または末尾のアルファベットBをAに置き換えた符号を付して説明を省略する。
【0051】
2速摩擦板35Bには、2速保持器21Bの切欠き30に係合する突片36が設けられ、この突片36と切欠き30の係合によって、2速摩擦板35Bが2速保持器21Bに回り止めされている。2速保持器21Bの切欠き30は、2速摩擦板35Bの突片36を軸方向にスライド可能に収容しており、このスライドによって、2速摩擦板35Bは、2速保持器21Bに回り止めされた状態のまま、2速出力ギヤ10Bの側面に接触する位置と離反する位置との間で、2速保持器21Bに対して軸方向に移動可能となっている。
【0052】
2速摩擦板35Bの突片36の先端に凹部37が形成されて、間座32の外周には、凹部37に係合する凸部38が形成されている。そして、凹部37と凸部38は、2速摩擦板35Bが2速出力ギヤ10Bの側面から離反した位置にある状態では、凹部37と凸部38が係合することで、2速摩擦板35Bを間座32を介して出力軸8に回り止めし、このとき、2速摩擦板35Bに回り止めされた2速保持器21Bが中立位置に保持されるようになっている。また、2速摩擦板35Bが2速出力ギヤ10Bの側面に接触する位置にある状態では、凹部37と凸部38の係合が解除することで、2速摩擦板35Bの回り止めが解除されるようになっている。
【0053】
2速摩擦板35Bと2速カム部材18Bの間には、軸方向に圧縮された状態で2速離反ばね39Bが組み込まれており、この2速離反ばね39Bの弾性復元力によって2速摩擦板35Bが2速出力ギヤ10Bの側面から離反する方向に付勢されている。
【0054】
2速離反ばね39Bは、間座32の外周に沿って巻回されたコイルスプリングであり、その一端が2速ワッシャ39Bを介して2速カム部材18Bの軸方向端面で支持されている。2速ワッシャ39Bは、2速カム部材18Bの軸方向端面の径方向溝29を覆うように環状に形成されている。
【0055】
シフトリング34は、1速摩擦板35Aを押圧して1速出力ギヤ10Aの側面に接触させる1速シフト位置と、2速摩擦板35Bを押圧して2速出力ギヤ10Bの側面に接触させる2速シフト位置との間で軸方向に移動可能に支持されている。また、シフトリング34を1速シフト位置と2速シフト位置の間で軸方向に移動させるシフト機構41が設けられている。
【0056】
図8、図9に示すように、シフト機構41は、シフトリング34を転がり軸受42を介して回転可能に支持するシフトスリーブ43と、そのシフトスリーブ43の外周に設けられた環状溝44に係合する二股状のシフトフォーク45と、シフトフォーク45が固定されたシフトロッド46と、シフトモータ47と、シフトモータ47の回転をシフトロッド46の直線運動に変換する運動変換機構48(送りねじ機構等)とからなる。
【0057】
図9に示すように、シフトロッド46は、出力軸8に対して間隔をおいて平行に配置され、ハウジング11内に組み込まれた一対の滑り軸受49で軸方向にスライド可能に支持されている。シフトリング34とシフトスリーブ43の間に組み込まれた転がり軸受42は、シフトリング34とシフトスリーブ43のいずれに対しても軸方向に非可動となるように組み付けられている。
【0058】
このシフト機構41は、シフトモータ47の回転が運動変換機構48により直線運動に変換されてシフトフォーク45に伝達し、そのシフトフォーク45の直線運動が転がり軸受42を介してシフトリング34に伝達することにより、シフトリング34を軸方向に移動させる。
【0059】
図5に示すように、シフトフォーク45と環状溝44の間の両側の軸方向隙間には、軸方向に圧縮可能な予圧ばね50が組み込まれている。これにより、シフトリング34で1速摩擦板35Aを押圧して1速出力ギヤ10Aの側面に接触させるときに、シフトスリーブ43に対するシフトフォーク45の軸方向の相対位置を調節することによって予圧ばね50のばね力を調節し、1速摩擦板35Aと1速出力ギヤ10Aの接触面間の摩擦力を調整することが可能となっている。また、シフトリング34で2速摩擦板35Bを押圧して2速出力ギヤ10Bの側面に接触させるときも、2速摩擦板35Bと2速出力ギヤ10Bの接触面間の摩擦力を調整することが可能となっている。
【0060】
図3に示すように、出力軸8には、出力軸8の回転をディファレンシャルギヤ6に伝達するディファレンシャル駆動ギヤ51が固定されている。
【0061】
ディファレンシャルギヤ6は、一対の軸受52で回転可能に支持されたデフケース53と、デフケース53の回転中心と同軸にデフケース53に固定され、ディファレンシャル駆動ギヤ51に噛合するリングギヤ54と、デフケース53の回転中心と直角な方向にデフケース53に固定されたピニオン軸55と、ピニオン軸55に回転可能に支持された一対のピニオン56と、その一対のピニオン56に噛合する左右一対のサイドギヤ57とからなる。左側のサイドギヤ57には、左側の車輪に接続されたアクスル58の軸端部が接続され、右側のサイドギヤ57には、右側の車輪に接続されたアクスル58の軸端部が接続されている。出力軸8が回転するとき、出力軸8の回転はディファレンシャル駆動ギヤ51を介してデフケース53に伝達され、そのデフケース53の回転がピニオン56とサイドギヤ57を介して左右の車輪に分配される。
【0062】
電動モータ3の発生するトルクは、図11に示すモータトルク制御装置59で制御される。このモータトルク制御装置59には、シフトレンジ検出手段60からシフトレンジ(すなわち、運転者により操作されるシフトレバーが、Dレンジ、Rレンジ、Nレンジ、Pレンジ等のいずれにあるか)に対応する信号が、アクセルペダル61からアクセルペダル61の操作量に対応する信号が、ブレーキペダル62からブレーキペダル62の操作量に対応する信号が、車速検出手段63からは車両の走行速度に対応する信号が、変速段検出手段64からは、現在の変速段(1速と2速のいずれか)を示す信号が入力される。また、モータトルク制御装置59は、電動モータ3の発生するトルクの指令値をインバータ65に出力する。インバータ65は、電動モータ3に電力を供給するとともに、その供給電力を、モータトルク制御装置59からの指令値に対応するトルクが電動モータ3で発生するよう制御する。
【0063】
以下に、車両用モータ駆動装置Aの動作例を説明する。
【0064】
まず、図5に示すように、1速摩擦板35Aが1速出力ギヤ10Aの側面から離反し、かつ、2速摩擦板35Bも2速出力ギヤ10Bの側面から離反した状態では、1速保持器21Aは1速スイッチばね22Aの弾性力により中立位置に保持され、2速保持器21Bも2速スイッチばね22Bの弾性力により中立位置に保持されるので、1速の2ウェイローラクラッチ16Aはローラ20の係合が解除された状態となり、2速の2ウェイローラクラッチ16Bもローラ20の係合が解除された状態となる。
【0065】
この状態では、図3に示す電動モータ3の駆動により入力軸7が回転しても、1速の2ウェイローラクラッチ16Aと2速の2ウェイローラクラッチ16Bによって回転の伝達が遮断されるので、1速出力ギヤ10Aおよび2速出力ギヤ10Bは空転し、入力軸7の回転は出力軸8に伝達されない。
【0066】
次に、シフト機構41を作動させて、図5に示すシフトリング34を1速出力ギヤ10Aに向けて移動させると、1速摩擦板35Aが1速出力ギヤ10Aの側面に接触し、その接触面間の摩擦力によって1速摩擦板35Aが出力軸8に対して相対回転し、この1速摩擦板35Aに回り止めされた1速保持器21Aが1速スイッチばね22Aの弾性力に抗して中立位置から係合位置に移動するので、1速保持器21Aに保持されたローラ20が、円筒面17とカム面19の間のくさび形空間の狭小部分に押し込まれて係合した状態となる。
【0067】
この状態では、1速出力ギヤ10Aの回転は、1速の2ウェイローラクラッチ16Aを介して出力軸8に伝達され、出力軸8の回転が、ディファレンシャルギヤ6を介してアクスル58に伝達される。その結果、図1に示す電気自動車EVにおいては、駆動輪としての前輪1が回転駆動され、図2に示すハイブリッド自動車HVにおいては補助駆動輪としての後輪2が回転駆動される。
【0068】
次に、シフト機構41の作動により、シフトリング34を1速シフト位置から2速シフト位置に向かって軸方向移動させると、1速摩擦板35Aと1速出力ギヤ10Aの接触面間の摩擦力が小さくなるので、1速スイッチばね22Aの弾性力により1速保持器21Aが係合位置から中立位置に移動し、この1速保持器21Aの移動によって1速の2ウェイローラクラッチ16Aの係合が解除される。
【0069】
シフトリング34が2速シフト位置に到達すると、2速摩擦板35Bがシフトリング34で押圧されて2速出力ギヤ10Bの側面に接触し、その接触面間の摩擦力によって2速摩擦板35Bが出力軸8に対して相対回転し、2速摩擦板35Bに回り止めされた2速保持器21Bが2速スイッチばね22Bの弾性力に抗して中立位置から係合位置に移動するので、2速保持器21Bに保持されたローラ20が、円筒面17とカム面19の間のくさび形空間の狭小部分に押し込まれて係合した状態となる。
【0070】
この状態では、2速出力ギヤ10Bの回転は、2速の2ウェイローラクラッチ16Bを介して出力軸8に伝達され、出力軸8の回転がディファレンシャルギヤ6を介してアクスル58に伝達される。
【0071】
同様に、シフトリング34を2速シフト位置から1速シフト位置に軸方向移動させることにより、2速の2ウェイローラクラッチ16Bの係合を解除して、1速の2ウェイローラクラッチ16Aを係合させることができる。
【0072】
ところで、上記構成の車両用モータ駆動装置Aにおいては、1速の2ウェイローラクラッチ16Aまたは2速の2ウェイローラクラッチ16Bのローラ20がカム面19と円筒面17の間に係合した状態において、アクセルペダル61を踏み込んだ状態からアクセルペダル61を戻し、その後、再びアクセルペダル61を踏み込んだときに、不快な振動・異音が発生する可能性がある。
【0073】
例えば、1速保持器21Aに保持されたローラ20がカム面19と円筒面17の間に係合した状態において、アクセルペダル61を踏み込んだ状態からアクセルペダル61を戻すと、アクセル操作量の減少に伴って電動モータ3の発生するトルクが小さくなる。このとき、電動モータ3から1速出力ギヤ10Aと1速摩擦板35Aとを介して1速保持器21Aに伝達するトルクが1速スイッチばね22Aの弾性力よりも小さくなってしまうと、1速スイッチばね22Aの弾性力により1速保持器21Aが係合位置から中立位置に移動し、1速の2ウェイローラクラッチ16Aのローラ20の係合が解除される。
【0074】
この場合、再びアクセルペダル61を踏み込むと、アクセル操作量の増大に伴って電動モータ3の発生するトルクが大きくなるので、電動モータ3から1速出力ギヤ10Aと1速摩擦板35Aとを介して1速保持器21Aに伝達するトルクが1速スイッチばね22Aの弾性力よりも大きくなり、そのトルクにより1速保持器21Aが1速スイッチばね22Aの弾性力に抗して中立位置から係合位置に移動し、1速の2ウェイローラクラッチ16Aのローラ20がカム面19と円筒面17の間に再び係合し、このローラ20が再係合する衝撃により不快な振動・異音が発生するおそれがある。
【0075】
同様に、2速保持器21Bに保持されたローラ20がカム面19と円筒面17の間に係合した状態においても、アクセルペダル61を踏み込んだ状態からアクセルペダル61を戻したときに、電動モータ3から2速出力ギヤ10Bと2速摩擦板35Bとを介して2速保持器21Bに伝達するトルクが2速スイッチばね22Bの弾性力よりも小さくなってしまうと、2速スイッチばね22Bの弾性力により2速保持器21Bが係合位置から中立位置に移動し、2速の2ウェイローラクラッチ16Bのローラ20の係合が解除され、その後、再びアクセルペダル61を踏み込んだときに、2速の2ウェイローラクラッチ16Bのローラ20が再係合するので、この再係合の衝撃により不快な振動・異音が発生するおそれがある。
【0076】
そこで、図11に示すモータトルク制御装置59は、シフトレンジ検出手段60、アクセルペダル61、ブレーキペダル62、車速検出手段63、変速段検出手段64からの信号に基づいて電動モータ3の発生するトルクを制御し、この制御によって、ローラ20の再係合による振動・異音を防止するようにしている。
【0077】
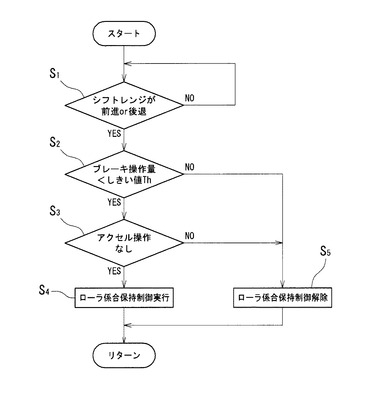
以下、このモータトルク制御装置59による制御を図12に示すフロー図に基づいて説明する。
【0078】
まず、シフトレンジ検出手段60からの信号に基づいて、シフトレンジが前進レンジまたは後退レンジ(Dレンジ、Rレンジ等)にあるか、それ以外のシフトレンジ(Nレンジ、Pレンジ等)にあるかを判定する(ステップS1)。シフトレンジが前進レンジまたは後退レンジにあると判定されたときは、次に、ブレーキペダル62およびアクセルペダル61からの信号に基づいて、現在のブレーキ操作量が予め設定されたしきい値Thよりも小さいか否か(ステップS2)、また、アクセルペダル61が踏み込まれているか否かを判定する(ステップS3)。
【0079】
ブレーキ操作量がしきい値Thよりも小さく、かつ、アクセルペダル61が踏み込まれていないと判定されたときは、現変速段の2ウェイローラクラッチ16A(または16B)の係合を保持するトルク(以下「ローラ係合保持トルク」という)を電動モータ3で発生するローラ係合保持制御を実行する(ステップS4)。
【0080】
ここで、ローラ係合保持トルクは、現変速段として1速の2ウェイローラクラッチ16Aが係合しているときは、1速保持器21Aを係合位置から中立位置に戻そうとする1速スイッチばね22Aの弾性力に抗して1速保持器21Aを係合位置に保持するトルクである。また、現変速段として2速の2ウェイローラクラッチ16Bが係合しているときは、2速保持器21Bを係合位置から中立位置に戻そうとする2速スイッチばね22Bの弾性力に抗して2速保持器21Bを係合位置に保持するトルクである。
【0081】
また、シフトレンジが前進レンジのとき、ローラ係合保持トルクは正転方向のトルクであり、現変速段の2ウェイローラクラッチ16A(または16B)のローラ20を、カム面19と円筒面17の間の正転方向側の狭小空間に保持する。一方、シフトレンジが後退レンジのとき、ローラ係合保持トルクは逆転方向のトルクであり、現変速段の2ウェイローラクラッチ16A(または16B)のローラ20を、カム面19と円筒面17の間の逆転方向側の狭小空間に保持する。
【0082】
ブレーキ操作量がしきい値Thよりも大きくなったときは(ステップS2)、ブレーキペダル62が踏み込まれたと考えられるので、ローラ係合保持制御を解除して通常のトルク制御に切り替える(ステップS5)。ここで、通常のトルク制御としては、例えば、車両が前進しているときに電動モータ3をブレーキとして使用する場合であれば、電動モータ3に逆転方向のトルクを発生させる制御が挙げられ、各車輪1,2に設置した図示しない摩擦ブレーキ装置を作動させる場合であれば、電動モータ3の発生トルクをゼロにする制御が挙げられる。
【0083】
また、アクセルペダル61が踏み込まれたと判定されたときも(ステップS3)、ローラ係合保持制御を解除して通常のトルク制御に切り替える(ステップS5)。ここで、通常のトルク制御としては、例えば、アクセルペダル61の操作量に応じた大きさのトルクを電動モータ3に発生させる制御が挙げられる。
【0084】
上述した構成の車両用モータ駆動装置Aを用いると、現変速段として1速の2ウェイローラクラッチ16Aが係合した状態において、アクセルペダル61を踏み込んだ状態からアクセルペダル61を戻したときに、1速保持器21Aを係合位置から中立位置に戻そうとする1速スイッチばね22Aの弾性力に抗して1速保持器21Aを係合位置に保持するトルクを電動モータ3が発生するので、1速保持器21Aが係合位置から中立位置に移動せず、1速の2ウェイローラクラッチ16Aのローラ20の係合が保持される。2速の2ウェイローラクラッチ16Bのローラ20がカム面19と円筒面17の間に係合した状態においても同様である。このように、アクセルペダル61を戻してから再びアクセルペダル61を踏み込むまでの一連の動作の間、現変速段の2ウェイローラクラッチ16A(または16B)のローラ20の係合が解除されないので、ローラ20の再係合による振動・異音が発生しない。
【0085】
モータトルク制御装置59は、ブレーキペダル62が踏み込まれているか否かを問わず、ローラ係合保持制御(ステップS4)を実行するように構成することも可能である。しかしながら、上記実施形態で示すように、運転者のブレーキ操作量がしきい値Thよりも大きいときに(ステップS2)、ローラ係合保持制御(ステップS4)を解除するように構成すると、ブレーキペダル62が踏み込まれたときに、ローラ係合保持トルクの発生を中止するので速やかに減速することが可能となり、安全性を高めることができる。
【0086】
上記実施形態では、運転者のブレーキ操作量がしきい値Thよりも大きいと判定されたときにローラ係合保持制御(ステップS4)が解除されるように構成したが、ブレーキペダル62が踏み込まれているか否かを示す二値信号に基づいてブレーキペダル62が踏み込まれたと判定されたときにローラ係合保持制御(ステップS4)が解除されるように構成してもよい。このようにしても、ブレーキペダル62が踏み込まれたときに、ローラ係合保持トルクの発生を中止するので速やかに減速することが可能となり、安全性を高めることができる。
【0087】
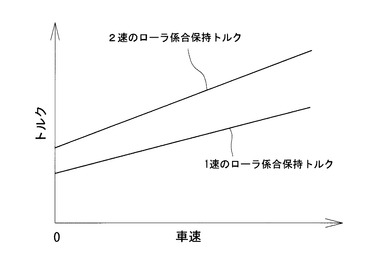
ローラ係合保持トルクの大きさは、車速によらず一定とすることも可能である。このようにした場合、車速が遅い状態においてアクセルペダル61の踏み込みを解除し、ローラ係合保持制御(ステップS4)が実行されたときは、車両の走行抵抗が小さいので、車両の走行抵抗と車両駆動力(すなわちローラ係合保持トルク)の差が小さく、車両の速度を維持することができる。しかしながら、車速が速い状態においてアクセルペダル61の踏み込みを解除し、ローラ係合保持制御(ステップS4)が実行されたときは、車両の走行抵抗が大きいので、車両の走行抵抗が車両駆動力を大きく上回ってしまい、車両が減速しやすくなる。その結果、減速した車速を元に戻そうと運転者がアクセルペダル61を踏み込むので、無駄な電気が消費される。
【0088】
そこで、ローラ係合保持トルクの大きさは、図13に示すように、車速が速いほど大きくなるように設定すると好ましい。このようにすると、車速が速いときは、ローラ係合保持トルクも大きくなるので、車速が速い状態においてアクセルペダル61の踏み込みを解除してローラ係合保持制御が実行されたときに、車両の走行抵抗と車両駆動力の差を小さく抑えることができ、車両の速度を維持しやすくなる。その結果、運転者が無駄にアクセルペダル61を踏み込むのを抑制することができ、電気消費量を抑えることが可能となる。
【0089】
ここで、車両速度がゼロのとき、ローラ係合保持トルクの大きさを、車両の走行抵抗よりも大きく設定すると好ましい。このようにすると、シフトレンジが前進レンジまたは後退レンジのとき、車両が停止した状態からブレーキペダル62の足を離すだけで、電動モータ3の発生トルクにより車両がクリープ走行するので、車庫入れや渋滞時の運転操作が容易となる。
【0090】
また、図13に示すように、ローラ係合保持トルクの大きさは、変速段に応じて設定することができる。このようにすると、ローラ係合保持制御が実行されるときの変速段にかかわらず、ローラ係合保持トルクの大きさを最適な大きさに調整することができる。
【符号の説明】
【0091】
1 前輪
2 後輪
3 電動モータ
6 ディファレンシャルギヤ
7 入力軸
8 出力軸
9A 1速入力ギヤ
9B 2速入力ギヤ
10A 1速出力ギヤ
10B 2速出力ギヤ
15 軸受
16A 1速の2ウェイローラクラッチ
16B 2速の2ウェイローラクラッチ
17 円筒面
19 カム面
20 ローラ
21A 1速保持器
21B 2速保持器
22A 1速スイッチばね
22B 2速スイッチばね
33 変速アクチュエータ
34 シフトリング
35A 1速摩擦板
35B 2速摩擦板
39A 1速離反ばね
39B 2速離反ばね
41 シフト機構
59 モータトルク制御装置
61 アクセルペダル
62 ブレーキペダル
A 車両用モータ駆動装置
E エンジン
EV 電気自動車
HV ハイブリッド自動車
【技術分野】
【0001】
この発明は、電動モータの回転を変速して車輪へ伝達する車両用モータ駆動装置およびそのモータ駆動装置を搭載した自動車に関する。
【背景技術】
【0002】
電気自動車およびハイブリッド自動車の駆動装置に用いられる車両用モータ駆動装置として、電動モータと、その電動モータの回転を変速する変速機と、その変速機から出力された回転を左右の車輪に分配するディファレンシャルギヤとからなるものが従来から知られている。
【0003】
この車両用モータ駆動装置を使用すると、走行条件に応じて変速機の変速比を切り換えることにより、駆動および回生時において、効率の高い回転数およびトルク領域で電動モータを使用することが可能となる。また、適切な変速比とすることで、高速走行時の変速機の回転部材の回転速度が下がり、変速機の動力損失が低減して車両のエネルギ効率を向上させることができる。
【0004】
このような車両用モータ駆動装置として、例えば特許文献1に記載のものが知られている。特許文献1に記載の車両用モータ駆動装置は、変速比の異なる2つの回転伝達経路にそれぞれ設けられた摩擦クラッチと、その摩擦クラッチを選択的に係合させる変速アクチュエータを有する。
【0005】
ここで、摩擦クラッチは、回転伝達経路の上流側に接続されたプレッシャプレートと、回転伝達経路の下流側に接続されたクラッチプレートとを軸方向に対向して配置したものであり、プレッシャプレートがクラッチプレートから離反した状態では回転の伝達が遮断され、プレッシャプレートをクラッチプレートに接触させると、その接触面間の摩擦力を介して回転が伝達される。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2010−223298号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、本願発明の発明者らは、変速比の異なる2つの回転伝達経路を切り換えるクラッチとして、上記の摩擦クラッチではなく、2ウェイローラクラッチを用いた車両用モータ駆動装置を検討し、そのような車両用モータ駆動装置として以下の構成のものを考案した。
【0008】
電動モータと、その電動モータの回転が入力される入力軸と、入力軸に対して間隔をおいて平行に配置された出力軸と、入力軸に設けられた1速入力ギヤおよび2速入力ギヤと、出力軸に設けられ、1速入力ギヤおよび2速入力ギヤにそれぞれ噛合する1速出力ギヤおよび2速出力ギヤと、出力軸の回転を左右の車輪に分配するディファレンシャルギヤとを有し、
1速出力ギヤと2速出力ギヤは軸受を介して出力軸で回転可能に支持され、
1速出力ギヤと出力軸との間でトルクの伝達と遮断の切換えを行なう1速の2ウェイローラクラッチと、2速出力ギヤと出力軸との間でトルクの伝達と遮断の切換えを行なう2速の2ウェイローラクラッチと、1速の2ウェイローラクラッチと2速の2ウェイローラクラッチとを選択的に係合させる変速アクチュエータを設けた車両用モータ駆動装置。
【0009】
ここで、1速の2ウェイローラクラッチは、1速出力ギヤの内周と出力軸の外周のうち一方に設けられた円筒面と、他方に設けられたカム面と、そのカム面と円筒面の間に組み込まれたローラと、そのローラを保持し、カム面と円筒面の間にローラを係合させる係合位置とローラの係合を解除する中立位置との間で出力軸に対して相対回転可能に設けられた1速保持器と、その1速保持器を中立位置に弾性保持する1速スイッチばねとからなる構成のものであり、1速保持器を係合位置と中立位置の間で周方向に移動させることにより、トルクの伝達と遮断を切り換えることができるようになっている。2速の2ウェイローラクラッチも、1速の2ウェイローラクラッチと同様の構成である。
【0010】
また、変速アクチュエータは、1速保持器に対して回り止めされかつ1速出力ギヤの側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた1速摩擦板と、その1速摩擦板を1速出力ギヤの側面から離反する方向に付勢する1速離反ばねと、2速保持器に対して回り止めされかつ2速出力ギヤの側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた2速摩擦板と、その2速摩擦板を2速出力ギヤの側面から離反する方向に付勢する2速離反ばねと、1速摩擦板を押圧して1速出力ギヤの側面に接触させる1速シフト位置と2速摩擦板を押圧して2速出力ギヤの側面に接触させる2速シフト位置との間で軸方向に移動可能に設けられたシフトリングと、そのシフトリングを軸方向に移動させるシフト機構とからなる。
【0011】
上記構成からなる車両用モータ駆動装置は、シフト機構の作動により、シフトリングを1速シフト位置に移動させたときは、1速摩擦板が1速出力ギヤの側面に接触し、その接触面間の摩擦力によって1速摩擦板が出力軸に対して相対回転し、この1速摩擦板に回り止めされた1速保持器が1速スイッチばねの弾性力に抗して中立位置から係合位置に移動するので、1速保持器に保持されたローラがカム面と円筒面の間に係合し、1速出力ギヤと出力軸との間でトルクの伝達が行われる。同様に、シフトリングを2速シフト位置に移動させたときは、2速保持器に保持されたローラがカム面と円筒面の間に係合し、2速出力ギヤと出力軸との間でトルクの伝達が行われる。
【0012】
ところで、この発明の発明者は、上記構成の車両用モータ駆動装置を採用した場合、1速の2ウェイローラクラッチまたは2速の2ウェイローラクラッチのローラがカム面と円筒面の間に係合した状態において、アクセルペダルを踏み込んだ状態からアクセルペダルを戻し、その後、再びアクセルペダルを踏み込んだときに、不快な振動・異音が発生するおそれがある問題を見出した。この問題を以下に説明する。
【0013】
例えば、1速の2ウェイローラクラッチが係合した状態において、アクセルペダルを踏み込んだ状態からアクセルペダルを戻すと、アクセル操作量の減少に伴って電動モータの発生するトルクが小さくなるので、電動モータから1速出力ギヤと1速摩擦板とを介して1速保持器に伝達するトルクが1速スイッチばねの弾性力よりも小さくなり、その結果、1速スイッチばねの弾性力により1速保持器が係合位置から中立位置に移動し、1速の2ウェイローラクラッチの係合が解除される。
【0014】
その後、再びアクセルペダルを踏み込むと、アクセル操作量の増大に伴って電動モータの発生するトルクが大きくなるので、電動モータから1速出力ギヤと1速摩擦板とを介して1速保持器に伝達するトルクが1速スイッチばねの弾性力よりも大きくなり、そのトルクにより1速保持器が1速スイッチばねの弾性力に抗して中立位置から係合位置に移動し、1速の2ウェイローラクラッチのローラがカム面と円筒面の間に再び係合し、このローラが再係合する衝撃により不快な振動・異音が発生するおそれがある。
【0015】
同様に、2速の2ウェイローラクラッチが係合した状態においても、アクセルペダルを踏み込んだ状態からアクセルペダルを戻すと、2速スイッチばねの弾性力により2速保持器が係合位置から中立位置に移動し、2速の2ウェイローラクラッチの係合が解除され、その後、再びアクセルペダルを踏み込んだときに、2速の2ウェイローラクラッチのローラが再係合するので、この再係合の衝撃により不快な振動・異音が発生するおそれがある。
【0016】
この発明が解決しようとする課題は、2ウェイローラクラッチを用いた車両用モータ駆動装置において、アクセルペダルを踏み込んだ状態からアクセルペダルを戻し、その後、再びアクセルペダルを踏み込んだときの振動・異音を防止することである。
【課題を解決するための手段】
【0017】
上記の課題を解決するため、この発明においては、電動モータと、その電動モータの回転が入力される入力軸と、前記入力軸に対して間隔をおいて平行に配置された出力軸と、前記入力軸に設けられた第1入力ギヤおよび第2入力ギヤと、前記出力軸に設けられ、前記第1入力ギヤおよび第2入力ギヤにそれぞれ噛合する第1出力ギヤおよび第2出力ギヤと、前記出力軸の回転を左右の車輪に分配するディファレンシャルギヤと、前記電動モータの発生トルクを制御するモータトルク制御装置とを有し、
前記第1入力ギヤと第2入力ギヤと入力軸の組と、前記第1出力ギヤと第2出力ギヤと出力軸の組とのうち一方を、第1クラッチギヤと第2クラッチギヤとこれらのクラッチギヤを軸受を介して回転可能に支持するクラッチギヤ支持軸とし、
前記第1クラッチギヤとクラッチギヤ支持軸との間でトルクの伝達と遮断の切換えを行なう第1の2ウェイローラクラッチと、前記第2クラッチギヤとクラッチギヤ支持軸との間でトルクの伝達と遮断の切換えを行なう第2の2ウェイローラクラッチと、前記第1の2ウェイローラクラッチと第2の2ウェイローラクラッチとを選択的に係合させる変速アクチュエータを設け、
前記第1の2ウェイローラクラッチは、第1クラッチギヤの内周とクラッチギヤ支持軸の外周のうち一方に設けられた円筒面と、他方に設けられたカム面と、そのカム面と前記円筒面の間に組み込まれたローラと、そのローラを保持し、前記カム面と円筒面の間にローラを係合させる係合位置とローラの係合を解除する中立位置との間で前記クラッチギヤ支持軸に対して相対回転可能に設けられた第1保持器と、その第1保持器を前記中立位置に弾性保持する第1スイッチばねとからなり、
前記第2の2ウェイローラクラッチは、第2クラッチギヤの内周とクラッチギヤ支持軸の外周のうち一方に設けられた円筒面と、他方に設けられたカム面と、そのカム面と前記円筒面の間に組み込まれたローラと、そのローラを保持し、前記カム面と円筒面の間にローラを係合させる係合位置とローラの係合を解除する中立位置との間で前記クラッチギヤ支持軸に対して相対回転可能に設けられた第2保持器と、その第2保持器を前記中立位置に弾性保持する第2スイッチばねとからなり、
前記変速アクチュエータは、前記第1保持器に対して回り止めされかつ前記第1クラッチギヤの側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた第1摩擦板と、その第1摩擦板を前記第1クラッチギヤの側面から離反する方向に付勢する第1離反ばねと、前記第2保持器に対して回り止めされかつ前記第2クラッチギヤの側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた第2摩擦板と、その第2摩擦板を前記第2クラッチギヤの側面から離反する方向に付勢する第2離反ばねと、前記第1摩擦板を押圧して前記第1クラッチギヤの側面に接触させる第1シフト位置と前記第2摩擦板を押圧して前記第2クラッチギヤの側面に接触させる第2シフト位置との間で軸方向に移動可能に設けられたシフトリングと、そのシフトリングを軸方向に移動させるシフト機構とからなり、
前記モータトルク制御装置は、アクセルペダルが踏み込まれているか否かを判定するアクセル操作判定手段と、そのアクセル操作判定手段でアクセルペダルが踏み込まれていないと判定されたときに、現変速段の2ウェイローラクラッチの保持器を係合位置から中立位置に戻そうとする前記スイッチばねの弾性力に抗して現変速段の2ウェイローラクラッチの保持器を係合位置に保持するトルクを前記電動モータで発生するローラ係合保持制御を実行するローラ係合保持制御手段とを有する構成を車両用モータ駆動装置に採用した。
【0018】
この構成を採用した車両用モータ駆動装置は、シフトリングが第1シフト位置にあるときは、第1摩擦板が第1クラッチギヤの側面に接触し、その接触面間の摩擦力によって第1摩擦板がクラッチギヤ支持軸に対して相対回転し、この第1摩擦板に回り止めされた第1保持器が第1スイッチばねの弾性力に抗して中立位置から係合位置に移動するので、第1保持器に保持されたローラがカム面と円筒面の間に係合し、第1クラッチギヤとクラッチギヤ支持軸との間でトルクの伝達が行われる。
【0019】
そして、上記構成の車両用モータ駆動装置を採用した場合、第1の2ウェイローラクラッチが係合した状態において、アクセルペダルを踏み込んだ状態からアクセルペダルを戻すと、アクセル操作量の減少に伴って電動モータの発生するトルクが小さくなるが、前記アクセル操作判定手段でアクセルペダルが踏み込まれていないと判定されたときに、前記ローラ係合保持制御手段が、第1保持器を係合位置から中立位置に戻そうとする第1スイッチばねの弾性力に抗して第1保持器を係合位置に保持するトルクを前記電動モータで発生するローラ係合保持制御を実行するので、第1保持器が係合位置から中立位置に移動せず、第1の2ウェイローラクラッチの係合が保持される。第2の2ウェイローラクラッチが係合した状態においても同様である。このように、アクセルペダルを戻してから再びアクセルペダルを踏み込むまでの一連の動作の間、現変速段の2ウェイローラクラッチの係合が解除されないので、ローラの再係合による振動・異音が発生しない。
【0020】
前記モータトルク制御装置は、ブレーキペダルが踏み込まれているか否かを問わず、前記ローラ係合保持制御を実行するように構成することも可能であるが、前記モータトルク制御装置は、運転者のブレーキ操作量が予め設定されたしきい値よりも大きいか否かを判定するブレーキ操作判定手段を更に設け、前記ローラ係合保持制御手段は、そのブレーキ操作判定手段で運転者のブレーキ操作量が前記しきい値よりも大きいと判定されたときに前記ローラ係合保持制御を解除するように構成すると好ましい。このようにすると、ブレーキペダルが踏み込まれたときに、ローラ係合保持制御によるトルクの発生を中止するので速やかに減速することが可能となり、安全性を高めることができる。
【0021】
また、前記モータトルク制御装置に、ブレーキペダルが踏み込まれているか否か判定するブレーキ操作判定手段を更に設け、前記ローラ係合保持制御手段は、そのブレーキ操作判定手段でブレーキペダルが踏み込まれていると判定されたときに前記ローラ係合保持制御を解除するように構成してもよい。このようにしても、ブレーキペダルが踏み込まれたときに、ローラ係合保持制御によるトルクの発生を中止するので速やかに減速することが可能となり、安全性を高めることができる。
【0022】
前記ローラ係合保持制御手段は、前記ローラ係合保持制御により前記電動モータで発生するトルクの大きさを車速によらず一定とすることも可能である。このようにした場合、車速が遅い状態においてアクセルペダルの踏み込みを解除し、前記ローラ係合保持制御が実行されたときは、車両の走行抵抗が小さいので、車両の走行抵抗と車両駆動力(すなわち前記ローラ係合保持制御により電動モータが発生するトルク)の差が小さく、車両の速度を維持することができる。しかしながら、車速が速い状態においてアクセルペダルの踏み込みを解除し、前記ローラ係合保持制御が実行されたときは、車両の走行抵抗が大きいので、車両の走行抵抗が車両駆動力を大きく上回ってしまい、車両が減速しやすくなる。その結果、減速した車速を元に戻そうと運転者がアクセルペダルを踏み込むので、無駄な電気が消費される。
【0023】
そこで、前記ローラ係合保持制御により前記電動モータで発生するトルクの大きさは、車速が速いほど大きくなるように設定すると好ましい。このようにすると、車速が速いときは、前記ローラ係合保持制御により電動モータが発生するトルクも大きくなるので、車速が速い状態においてアクセルペダルの踏み込みを解除して前記ローラ係合保持制御が実行されたときに、車両の走行抵抗と車両駆動力の差を小さく抑えることができ、車両の速度を維持しやすくなる。その結果、運転者が無駄にアクセルペダルを踏み込むのを抑制することができ、電気消費量を抑えることが可能となる。
【0024】
また、前記ローラ係合保持制御により前記電動モータで発生するトルクの大きさは、変速段に応じて設定することができる。このようにすると、前記ローラ係合保持制御が実行されるときの変速段にかかわらず、前記ローラ係合保持制御により電動モータで発生するトルクの大きさを最適な大きさに調整することができる。
【0025】
また、この発明では、上記の車両用モータ駆動装置を用いた電気自動車として、左右一対の前輪と左右一対の後輪のうち少なくとも一方を上記の車両用モータ駆動装置で駆動するようにした電気自動車を提供する。
【0026】
また、この発明では、上記の車両用モータ駆動装置を用いたハイブリッド自動車として、左右一対の前輪と左右一対の後輪のうち一方をエンジンで駆動し、他方を上記の車両用モータ駆動装置で駆動するようにしたハイブリッド自動車を提供する。
【発明の効果】
【0027】
この発明の車両用モータ駆動装置を採用すると、アクセルペダルを踏み込んだ状態からアクセルペダルを戻したときに、電動モータが、現変速段の保持器を係合位置から中立位置に戻そうとするスイッチばねの弾性力に抗して現変速段の保持器を係合位置に保持するトルクを発生するので、現変速段の保持器が係合位置から中立位置に移動せず、現変速段の2ウェイローラクラッチの係合が保持される。したがって、アクセルペダルを戻してから再びアクセルペダルを踏み込んだときに、ローラの再係合による振動・異音が発生しない。
【図面の簡単な説明】
【0028】
【図1】この発明に係る車両用モータ駆動装置を採用した電気自動車の概略図
【図2】この発明に係る車両用モータ駆動装置を採用したハイブリッド自動車の概略図
【図3】この発明に係る車両用モータ駆動装置の断面図
【図4】図3の1速出力ギヤおよび2速出力ギヤ近傍の拡大断面図
【図5】図4のシフトリング近傍の拡大断面図
【図6】図4のVI−VI線に沿った断面図
【図7】図4のVII−VII線に沿った断面図
【図8】図4のVIII−VIII線に沿った断面図
【図9】シフト機構を示す断面図
【図10】図4の2速カム部材近傍の分解斜視図
【図11】図3に示す電動モータのモータトルク制御装置のブロック図
【図12】図11に示すモータトルク制御装置の制御を示すフロー図
【図13】図12に示すローラ係合保持制御を実行したときに電動モータで発生するトルクと、車速との対応関係を示す図
【発明を実施するための形態】
【0029】
図1は、左右一対の前輪1をこの発明に係る車両用モータ駆動装置Aで駆動される駆動輪とし、左右一対の後輪2を従動輪とした電気自動車EVを示す。
【0030】
図2は、左右一対の前輪1をエンジンEによって駆動される主駆動輪とし、左右一対の後輪2をこの発明に係る車両用モータ駆動装置Aで駆動される補助駆動輪としたハイブリッド自動車HVを示す。ハイブリッド自動車HVには、エンジンEの回転を変速するトランスミッションTと、トランスミッションTから出力された回転を左右の前輪1に分配するディファレンシャルギヤDとが設けられている。
【0031】
この電気自動車EVおよびハイブリッド自動車HVに組み込まれたこの発明に係る車両用モータ駆動装置Aについて以下に説明する。
【0032】
図3に示すように、車両用モータ駆動装置Aは、電動モータ3と、電動モータ3のモータ軸4の回転を変速して出力する変速機5と、その変速機5から出力された回転を図1に示す電気自動車EVの左右一対の前輪1に分配し、または、図2に示すハイブリッド自動車HVの左右一対の後輪2に分配するディファレンシャルギヤ6とを有する。
【0033】
変速機5は、図3に示すように、モータ軸4の回転が入力される入力軸7と、入力軸7に対して間隔をおいて平行に配置された出力軸8と、入力軸7に設けられた1速入力ギヤ9Aおよび2速入力ギヤ9Bと、出力軸8に設けられた1速出力ギヤ10Aおよび2速出力ギヤ10Bとを有する。
【0034】
モータ軸4は、入力軸7と同軸上に直列に配置されており、ハウジング11に固定された電動モータ3のステータ12で回転駆動される。入力軸7は、ハウジング11内に組込まれた対向一対の軸受13により回転可能に支持され、入力軸7の軸端はスプライン嵌合によってモータ軸4に接続されている。出力軸8は、ハウジング11内に組込まれた対向一対の軸受14により回転可能に支持されている。
【0035】
1速入力ギヤ9Aと2速入力ギヤ9Bは軸方向に間隔をおいて配置され、入力軸7を中心として入力軸7と一体に回転するように入力軸7に固定されている。1速出力ギヤ10Aと2速出力ギヤ10Bも軸方向に間隔をおいて配置されている。
【0036】
図4に示すように、1速出力ギヤ10Aは、出力軸8を貫通させる環状に形成され、軸受15を介して出力軸8で支持されており、出力軸8を中心として出力軸8に対して回転可能となっている。同様に、2速出力ギヤ10Bも、軸受15を介して出力軸8で回転可能に支持されている。
【0037】
1速入力ギヤ9Aと1速出力ギヤ10Aは互いに噛合しており、その噛合によって1速入力ギヤ9Aと1速出力ギヤ10Aの間で回転が伝達するようになっている。2速入力ギヤ9Bと2速出力ギヤ10Bも噛合しており、その噛合によって2速入力ギヤ9Bと2速出力ギヤ10Bの間で回転が伝達するようになっている。2速入力ギヤ9Bと2速出力ギヤ10Bの減速比は、1速入力ギヤ9Aと1速出力ギヤ10Aの減速比よりも小さい。
【0038】
1速出力ギヤ10Aと出力軸8の間には、1速出力ギヤ10Aと出力軸8の間でトルクの伝達と遮断の切換えを行なう1速の2ウェイローラクラッチ16Aが組込まれている。また、2速出力ギヤ10Bと出力軸8の間には、2速出力ギヤ10Bと出力軸8の間でトルクの伝達と遮断の切換えを行なう2速の2ウェイローラクラッチ16Bが組込まれている。
【0039】
1速の2ウェイローラクラッチ16Aと2速の2ウェイローラクラッチ16Bは、左右対称の同一構成なので、2速の2ウェイローラクラッチ16Bを以下に説明し、1速の2ウェイローラクラッチ16Aについては、2速の2ウェイローラクラッチ16Bに対応する部分に同一の符号または末尾のアルファベットBをAに置き換えた符号を付して説明を省略する。
【0040】
図5〜図7に示すように、2速の2ウェイローラクラッチ16Bは、2速出力ギヤ10Bの内周に設けられた円筒面17と、出力軸8の外周に回り止めした環状の2速カム部材18Bに形成されたカム面19と、カム面19と円筒面17の間に組み込まれたローラ20と、ローラ20を保持する2速保持器21Bと、2速スイッチばね22Bとからなる。カム面19は、円筒面17との間で周方向中央から周方向両端に向かって次第に狭くなるくさび形空間を形成するような面であり、例えば、図6に示すように円筒面17と対向する平坦面である。
【0041】
図4、図10に示すように、2速保持器21Bは、ローラ20を収容する複数のポケット23が周方向に間隔をおいて形成された円筒部24と、円筒部24の一端から径方向内方に延び出す内向きフランジ部25とを有する。内向きフランジ部25の径方向内端は、2速カム部材18Bの外周で周方向にスライド可能に支持され、この周方向のスライドによって、2速保持器21Bは、カム面19と円筒面17の間にローラ20を係合させる係合位置とローラ20の係合を解除する中立位置との間で出力軸8に対して相対回転可能となっている。また、2速保持器21Bの内向きフランジ部25は軸方向両側への移動が規制され、これにより2速保持器21Bが軸方向に非可動とされている。
【0042】
図6に示すように、各カム面19は、回転中心を含む仮想平面に対して対称に形成され、これにより、各カム面19と円筒面17の間に配置されたローラ20は、正転方向と逆転方向の両方向で係合可能となっている。すなわち、電動モータ3が発生するトルクにより車両を前進させるときは、2速保持器21Bを出力軸8に対して正転方向に相対回転させることにより、2速保持器21Bに保持されたローラ20を、カム面19と円筒面17の間の正転方向側の狭小空間に係合させ、そのローラ20を介して2速出力ギヤ9Bと出力軸8の間で正転方向のトルクを伝達することが可能となっており、一方、電動モータ3が発生するトルクにより車両を後退させるときは、2速保持器21Bを出力軸8に対して逆転方向に相対回転させることにより、2速保持器21Bに保持されたローラ20を、カム面19と円筒面17の間の逆転方向側の狭小空間に係合させ、そのローラ20を介して2速出力ギヤ9Bと出力軸8の間で逆転方向のトルクを伝達することが可能となっている。
【0043】
図7、図10に示すように、2速スイッチばね22Bは、鋼線をC形に巻いたC形環状部26と、C形環状部26の両端からそれぞれ径方向外方に延出する一対の延出部27,27とからなる。C形環状部26は、2速カム部材18Bの軸方向端面に形成された円形のスイッチばね収容凹部28に嵌め込まれ、一対の延出部27,27は、2速カム部材18Bの軸方向端面に形成された径方向溝29に挿入されている。
【0044】
径方向溝29は、スイッチばね収容凹部28の内周縁から径方向外方に延びて2速カム部材18Bの外周に至るように形成されている。2速スイッチばね22Bの延出部27は、径方向溝29の径方向外端から突出しており、その延出部27の径方向溝29からの突出部分が、2速保持器21Bの円筒部24の軸方向端部に形成された切欠き30に挿入されている。径方向溝29と切欠き30は同じ幅に形成されている。
【0045】
延出部27,27は、径方向溝29の周方向で対向する内面と、切欠き30の周方向で対向する内面にそれぞれ接触しており、その接触面に作用する周方向の力によって2速保持器21Bを中立位置に弾性保持している。
【0046】
すなわち、2速保持器21Bを出力軸8に対して相対回転させて、図7に示す中立位置から周方向に移動させると、径方向溝29の位置と切欠き30の位置が周方向にずれるので、一対の延出部27,27の間隔が狭まる方向にC形環状部26が弾性変形し、その弾性復元力によって2速スイッチばね22Bの一対の延出部27,27が径方向溝29の内面と切欠き30の内面を押圧し、その押圧によって2速保持器21Bを中立位置に戻す方向の力が作用するようになっている。
【0047】
図4に示すように、1速カム部材18Aと2速カム部材18Bの出力軸8に対する回り止めは、スプライン嵌合によって行なわれている。1速カム部材18Aのカム面19と2速カム部材18Bのカム面19は同数かつ同位相となっている。また、1速カム部材18Aと2速カム部材18Bは、出力軸8の外周に嵌合した一対の止め輪31によって軸方向に非可動となっている。1速カム部材18Aと2速カム部材18Bの間には間座32が組み込まれている。
【0048】
1速の2ウェイローラクラッチ16Aと2速の2ウェイローラクラッチ16Bは、変速アクチュエータ33により選択的に係合することができるようになっている。
【0049】
図5に示すように、変速アクチュエータ33は、1速出力ギヤ10Aと2速出力ギヤ10Bの間に軸方向に移動可能に設けられたシフトリング34と、1速出力ギヤ10Aとシフトリング34の間に組み込まれた1速摩擦板35Aと、2速出力ギヤ10Bとシフトリング34の間に組み込まれた2速摩擦板35Bとを有する。
【0050】
ここで、1速摩擦板35Aと2速摩擦板35Bは、左右対称の同一構成なので、2速摩擦板35Bを以下に説明し、1速摩擦板35Aについては、2速摩擦板35Bに対応する部分に同一の符号または末尾のアルファベットBをAに置き換えた符号を付して説明を省略する。
【0051】
2速摩擦板35Bには、2速保持器21Bの切欠き30に係合する突片36が設けられ、この突片36と切欠き30の係合によって、2速摩擦板35Bが2速保持器21Bに回り止めされている。2速保持器21Bの切欠き30は、2速摩擦板35Bの突片36を軸方向にスライド可能に収容しており、このスライドによって、2速摩擦板35Bは、2速保持器21Bに回り止めされた状態のまま、2速出力ギヤ10Bの側面に接触する位置と離反する位置との間で、2速保持器21Bに対して軸方向に移動可能となっている。
【0052】
2速摩擦板35Bの突片36の先端に凹部37が形成されて、間座32の外周には、凹部37に係合する凸部38が形成されている。そして、凹部37と凸部38は、2速摩擦板35Bが2速出力ギヤ10Bの側面から離反した位置にある状態では、凹部37と凸部38が係合することで、2速摩擦板35Bを間座32を介して出力軸8に回り止めし、このとき、2速摩擦板35Bに回り止めされた2速保持器21Bが中立位置に保持されるようになっている。また、2速摩擦板35Bが2速出力ギヤ10Bの側面に接触する位置にある状態では、凹部37と凸部38の係合が解除することで、2速摩擦板35Bの回り止めが解除されるようになっている。
【0053】
2速摩擦板35Bと2速カム部材18Bの間には、軸方向に圧縮された状態で2速離反ばね39Bが組み込まれており、この2速離反ばね39Bの弾性復元力によって2速摩擦板35Bが2速出力ギヤ10Bの側面から離反する方向に付勢されている。
【0054】
2速離反ばね39Bは、間座32の外周に沿って巻回されたコイルスプリングであり、その一端が2速ワッシャ39Bを介して2速カム部材18Bの軸方向端面で支持されている。2速ワッシャ39Bは、2速カム部材18Bの軸方向端面の径方向溝29を覆うように環状に形成されている。
【0055】
シフトリング34は、1速摩擦板35Aを押圧して1速出力ギヤ10Aの側面に接触させる1速シフト位置と、2速摩擦板35Bを押圧して2速出力ギヤ10Bの側面に接触させる2速シフト位置との間で軸方向に移動可能に支持されている。また、シフトリング34を1速シフト位置と2速シフト位置の間で軸方向に移動させるシフト機構41が設けられている。
【0056】
図8、図9に示すように、シフト機構41は、シフトリング34を転がり軸受42を介して回転可能に支持するシフトスリーブ43と、そのシフトスリーブ43の外周に設けられた環状溝44に係合する二股状のシフトフォーク45と、シフトフォーク45が固定されたシフトロッド46と、シフトモータ47と、シフトモータ47の回転をシフトロッド46の直線運動に変換する運動変換機構48(送りねじ機構等)とからなる。
【0057】
図9に示すように、シフトロッド46は、出力軸8に対して間隔をおいて平行に配置され、ハウジング11内に組み込まれた一対の滑り軸受49で軸方向にスライド可能に支持されている。シフトリング34とシフトスリーブ43の間に組み込まれた転がり軸受42は、シフトリング34とシフトスリーブ43のいずれに対しても軸方向に非可動となるように組み付けられている。
【0058】
このシフト機構41は、シフトモータ47の回転が運動変換機構48により直線運動に変換されてシフトフォーク45に伝達し、そのシフトフォーク45の直線運動が転がり軸受42を介してシフトリング34に伝達することにより、シフトリング34を軸方向に移動させる。
【0059】
図5に示すように、シフトフォーク45と環状溝44の間の両側の軸方向隙間には、軸方向に圧縮可能な予圧ばね50が組み込まれている。これにより、シフトリング34で1速摩擦板35Aを押圧して1速出力ギヤ10Aの側面に接触させるときに、シフトスリーブ43に対するシフトフォーク45の軸方向の相対位置を調節することによって予圧ばね50のばね力を調節し、1速摩擦板35Aと1速出力ギヤ10Aの接触面間の摩擦力を調整することが可能となっている。また、シフトリング34で2速摩擦板35Bを押圧して2速出力ギヤ10Bの側面に接触させるときも、2速摩擦板35Bと2速出力ギヤ10Bの接触面間の摩擦力を調整することが可能となっている。
【0060】
図3に示すように、出力軸8には、出力軸8の回転をディファレンシャルギヤ6に伝達するディファレンシャル駆動ギヤ51が固定されている。
【0061】
ディファレンシャルギヤ6は、一対の軸受52で回転可能に支持されたデフケース53と、デフケース53の回転中心と同軸にデフケース53に固定され、ディファレンシャル駆動ギヤ51に噛合するリングギヤ54と、デフケース53の回転中心と直角な方向にデフケース53に固定されたピニオン軸55と、ピニオン軸55に回転可能に支持された一対のピニオン56と、その一対のピニオン56に噛合する左右一対のサイドギヤ57とからなる。左側のサイドギヤ57には、左側の車輪に接続されたアクスル58の軸端部が接続され、右側のサイドギヤ57には、右側の車輪に接続されたアクスル58の軸端部が接続されている。出力軸8が回転するとき、出力軸8の回転はディファレンシャル駆動ギヤ51を介してデフケース53に伝達され、そのデフケース53の回転がピニオン56とサイドギヤ57を介して左右の車輪に分配される。
【0062】
電動モータ3の発生するトルクは、図11に示すモータトルク制御装置59で制御される。このモータトルク制御装置59には、シフトレンジ検出手段60からシフトレンジ(すなわち、運転者により操作されるシフトレバーが、Dレンジ、Rレンジ、Nレンジ、Pレンジ等のいずれにあるか)に対応する信号が、アクセルペダル61からアクセルペダル61の操作量に対応する信号が、ブレーキペダル62からブレーキペダル62の操作量に対応する信号が、車速検出手段63からは車両の走行速度に対応する信号が、変速段検出手段64からは、現在の変速段(1速と2速のいずれか)を示す信号が入力される。また、モータトルク制御装置59は、電動モータ3の発生するトルクの指令値をインバータ65に出力する。インバータ65は、電動モータ3に電力を供給するとともに、その供給電力を、モータトルク制御装置59からの指令値に対応するトルクが電動モータ3で発生するよう制御する。
【0063】
以下に、車両用モータ駆動装置Aの動作例を説明する。
【0064】
まず、図5に示すように、1速摩擦板35Aが1速出力ギヤ10Aの側面から離反し、かつ、2速摩擦板35Bも2速出力ギヤ10Bの側面から離反した状態では、1速保持器21Aは1速スイッチばね22Aの弾性力により中立位置に保持され、2速保持器21Bも2速スイッチばね22Bの弾性力により中立位置に保持されるので、1速の2ウェイローラクラッチ16Aはローラ20の係合が解除された状態となり、2速の2ウェイローラクラッチ16Bもローラ20の係合が解除された状態となる。
【0065】
この状態では、図3に示す電動モータ3の駆動により入力軸7が回転しても、1速の2ウェイローラクラッチ16Aと2速の2ウェイローラクラッチ16Bによって回転の伝達が遮断されるので、1速出力ギヤ10Aおよび2速出力ギヤ10Bは空転し、入力軸7の回転は出力軸8に伝達されない。
【0066】
次に、シフト機構41を作動させて、図5に示すシフトリング34を1速出力ギヤ10Aに向けて移動させると、1速摩擦板35Aが1速出力ギヤ10Aの側面に接触し、その接触面間の摩擦力によって1速摩擦板35Aが出力軸8に対して相対回転し、この1速摩擦板35Aに回り止めされた1速保持器21Aが1速スイッチばね22Aの弾性力に抗して中立位置から係合位置に移動するので、1速保持器21Aに保持されたローラ20が、円筒面17とカム面19の間のくさび形空間の狭小部分に押し込まれて係合した状態となる。
【0067】
この状態では、1速出力ギヤ10Aの回転は、1速の2ウェイローラクラッチ16Aを介して出力軸8に伝達され、出力軸8の回転が、ディファレンシャルギヤ6を介してアクスル58に伝達される。その結果、図1に示す電気自動車EVにおいては、駆動輪としての前輪1が回転駆動され、図2に示すハイブリッド自動車HVにおいては補助駆動輪としての後輪2が回転駆動される。
【0068】
次に、シフト機構41の作動により、シフトリング34を1速シフト位置から2速シフト位置に向かって軸方向移動させると、1速摩擦板35Aと1速出力ギヤ10Aの接触面間の摩擦力が小さくなるので、1速スイッチばね22Aの弾性力により1速保持器21Aが係合位置から中立位置に移動し、この1速保持器21Aの移動によって1速の2ウェイローラクラッチ16Aの係合が解除される。
【0069】
シフトリング34が2速シフト位置に到達すると、2速摩擦板35Bがシフトリング34で押圧されて2速出力ギヤ10Bの側面に接触し、その接触面間の摩擦力によって2速摩擦板35Bが出力軸8に対して相対回転し、2速摩擦板35Bに回り止めされた2速保持器21Bが2速スイッチばね22Bの弾性力に抗して中立位置から係合位置に移動するので、2速保持器21Bに保持されたローラ20が、円筒面17とカム面19の間のくさび形空間の狭小部分に押し込まれて係合した状態となる。
【0070】
この状態では、2速出力ギヤ10Bの回転は、2速の2ウェイローラクラッチ16Bを介して出力軸8に伝達され、出力軸8の回転がディファレンシャルギヤ6を介してアクスル58に伝達される。
【0071】
同様に、シフトリング34を2速シフト位置から1速シフト位置に軸方向移動させることにより、2速の2ウェイローラクラッチ16Bの係合を解除して、1速の2ウェイローラクラッチ16Aを係合させることができる。
【0072】
ところで、上記構成の車両用モータ駆動装置Aにおいては、1速の2ウェイローラクラッチ16Aまたは2速の2ウェイローラクラッチ16Bのローラ20がカム面19と円筒面17の間に係合した状態において、アクセルペダル61を踏み込んだ状態からアクセルペダル61を戻し、その後、再びアクセルペダル61を踏み込んだときに、不快な振動・異音が発生する可能性がある。
【0073】
例えば、1速保持器21Aに保持されたローラ20がカム面19と円筒面17の間に係合した状態において、アクセルペダル61を踏み込んだ状態からアクセルペダル61を戻すと、アクセル操作量の減少に伴って電動モータ3の発生するトルクが小さくなる。このとき、電動モータ3から1速出力ギヤ10Aと1速摩擦板35Aとを介して1速保持器21Aに伝達するトルクが1速スイッチばね22Aの弾性力よりも小さくなってしまうと、1速スイッチばね22Aの弾性力により1速保持器21Aが係合位置から中立位置に移動し、1速の2ウェイローラクラッチ16Aのローラ20の係合が解除される。
【0074】
この場合、再びアクセルペダル61を踏み込むと、アクセル操作量の増大に伴って電動モータ3の発生するトルクが大きくなるので、電動モータ3から1速出力ギヤ10Aと1速摩擦板35Aとを介して1速保持器21Aに伝達するトルクが1速スイッチばね22Aの弾性力よりも大きくなり、そのトルクにより1速保持器21Aが1速スイッチばね22Aの弾性力に抗して中立位置から係合位置に移動し、1速の2ウェイローラクラッチ16Aのローラ20がカム面19と円筒面17の間に再び係合し、このローラ20が再係合する衝撃により不快な振動・異音が発生するおそれがある。
【0075】
同様に、2速保持器21Bに保持されたローラ20がカム面19と円筒面17の間に係合した状態においても、アクセルペダル61を踏み込んだ状態からアクセルペダル61を戻したときに、電動モータ3から2速出力ギヤ10Bと2速摩擦板35Bとを介して2速保持器21Bに伝達するトルクが2速スイッチばね22Bの弾性力よりも小さくなってしまうと、2速スイッチばね22Bの弾性力により2速保持器21Bが係合位置から中立位置に移動し、2速の2ウェイローラクラッチ16Bのローラ20の係合が解除され、その後、再びアクセルペダル61を踏み込んだときに、2速の2ウェイローラクラッチ16Bのローラ20が再係合するので、この再係合の衝撃により不快な振動・異音が発生するおそれがある。
【0076】
そこで、図11に示すモータトルク制御装置59は、シフトレンジ検出手段60、アクセルペダル61、ブレーキペダル62、車速検出手段63、変速段検出手段64からの信号に基づいて電動モータ3の発生するトルクを制御し、この制御によって、ローラ20の再係合による振動・異音を防止するようにしている。
【0077】
以下、このモータトルク制御装置59による制御を図12に示すフロー図に基づいて説明する。
【0078】
まず、シフトレンジ検出手段60からの信号に基づいて、シフトレンジが前進レンジまたは後退レンジ(Dレンジ、Rレンジ等)にあるか、それ以外のシフトレンジ(Nレンジ、Pレンジ等)にあるかを判定する(ステップS1)。シフトレンジが前進レンジまたは後退レンジにあると判定されたときは、次に、ブレーキペダル62およびアクセルペダル61からの信号に基づいて、現在のブレーキ操作量が予め設定されたしきい値Thよりも小さいか否か(ステップS2)、また、アクセルペダル61が踏み込まれているか否かを判定する(ステップS3)。
【0079】
ブレーキ操作量がしきい値Thよりも小さく、かつ、アクセルペダル61が踏み込まれていないと判定されたときは、現変速段の2ウェイローラクラッチ16A(または16B)の係合を保持するトルク(以下「ローラ係合保持トルク」という)を電動モータ3で発生するローラ係合保持制御を実行する(ステップS4)。
【0080】
ここで、ローラ係合保持トルクは、現変速段として1速の2ウェイローラクラッチ16Aが係合しているときは、1速保持器21Aを係合位置から中立位置に戻そうとする1速スイッチばね22Aの弾性力に抗して1速保持器21Aを係合位置に保持するトルクである。また、現変速段として2速の2ウェイローラクラッチ16Bが係合しているときは、2速保持器21Bを係合位置から中立位置に戻そうとする2速スイッチばね22Bの弾性力に抗して2速保持器21Bを係合位置に保持するトルクである。
【0081】
また、シフトレンジが前進レンジのとき、ローラ係合保持トルクは正転方向のトルクであり、現変速段の2ウェイローラクラッチ16A(または16B)のローラ20を、カム面19と円筒面17の間の正転方向側の狭小空間に保持する。一方、シフトレンジが後退レンジのとき、ローラ係合保持トルクは逆転方向のトルクであり、現変速段の2ウェイローラクラッチ16A(または16B)のローラ20を、カム面19と円筒面17の間の逆転方向側の狭小空間に保持する。
【0082】
ブレーキ操作量がしきい値Thよりも大きくなったときは(ステップS2)、ブレーキペダル62が踏み込まれたと考えられるので、ローラ係合保持制御を解除して通常のトルク制御に切り替える(ステップS5)。ここで、通常のトルク制御としては、例えば、車両が前進しているときに電動モータ3をブレーキとして使用する場合であれば、電動モータ3に逆転方向のトルクを発生させる制御が挙げられ、各車輪1,2に設置した図示しない摩擦ブレーキ装置を作動させる場合であれば、電動モータ3の発生トルクをゼロにする制御が挙げられる。
【0083】
また、アクセルペダル61が踏み込まれたと判定されたときも(ステップS3)、ローラ係合保持制御を解除して通常のトルク制御に切り替える(ステップS5)。ここで、通常のトルク制御としては、例えば、アクセルペダル61の操作量に応じた大きさのトルクを電動モータ3に発生させる制御が挙げられる。
【0084】
上述した構成の車両用モータ駆動装置Aを用いると、現変速段として1速の2ウェイローラクラッチ16Aが係合した状態において、アクセルペダル61を踏み込んだ状態からアクセルペダル61を戻したときに、1速保持器21Aを係合位置から中立位置に戻そうとする1速スイッチばね22Aの弾性力に抗して1速保持器21Aを係合位置に保持するトルクを電動モータ3が発生するので、1速保持器21Aが係合位置から中立位置に移動せず、1速の2ウェイローラクラッチ16Aのローラ20の係合が保持される。2速の2ウェイローラクラッチ16Bのローラ20がカム面19と円筒面17の間に係合した状態においても同様である。このように、アクセルペダル61を戻してから再びアクセルペダル61を踏み込むまでの一連の動作の間、現変速段の2ウェイローラクラッチ16A(または16B)のローラ20の係合が解除されないので、ローラ20の再係合による振動・異音が発生しない。
【0085】
モータトルク制御装置59は、ブレーキペダル62が踏み込まれているか否かを問わず、ローラ係合保持制御(ステップS4)を実行するように構成することも可能である。しかしながら、上記実施形態で示すように、運転者のブレーキ操作量がしきい値Thよりも大きいときに(ステップS2)、ローラ係合保持制御(ステップS4)を解除するように構成すると、ブレーキペダル62が踏み込まれたときに、ローラ係合保持トルクの発生を中止するので速やかに減速することが可能となり、安全性を高めることができる。
【0086】
上記実施形態では、運転者のブレーキ操作量がしきい値Thよりも大きいと判定されたときにローラ係合保持制御(ステップS4)が解除されるように構成したが、ブレーキペダル62が踏み込まれているか否かを示す二値信号に基づいてブレーキペダル62が踏み込まれたと判定されたときにローラ係合保持制御(ステップS4)が解除されるように構成してもよい。このようにしても、ブレーキペダル62が踏み込まれたときに、ローラ係合保持トルクの発生を中止するので速やかに減速することが可能となり、安全性を高めることができる。
【0087】
ローラ係合保持トルクの大きさは、車速によらず一定とすることも可能である。このようにした場合、車速が遅い状態においてアクセルペダル61の踏み込みを解除し、ローラ係合保持制御(ステップS4)が実行されたときは、車両の走行抵抗が小さいので、車両の走行抵抗と車両駆動力(すなわちローラ係合保持トルク)の差が小さく、車両の速度を維持することができる。しかしながら、車速が速い状態においてアクセルペダル61の踏み込みを解除し、ローラ係合保持制御(ステップS4)が実行されたときは、車両の走行抵抗が大きいので、車両の走行抵抗が車両駆動力を大きく上回ってしまい、車両が減速しやすくなる。その結果、減速した車速を元に戻そうと運転者がアクセルペダル61を踏み込むので、無駄な電気が消費される。
【0088】
そこで、ローラ係合保持トルクの大きさは、図13に示すように、車速が速いほど大きくなるように設定すると好ましい。このようにすると、車速が速いときは、ローラ係合保持トルクも大きくなるので、車速が速い状態においてアクセルペダル61の踏み込みを解除してローラ係合保持制御が実行されたときに、車両の走行抵抗と車両駆動力の差を小さく抑えることができ、車両の速度を維持しやすくなる。その結果、運転者が無駄にアクセルペダル61を踏み込むのを抑制することができ、電気消費量を抑えることが可能となる。
【0089】
ここで、車両速度がゼロのとき、ローラ係合保持トルクの大きさを、車両の走行抵抗よりも大きく設定すると好ましい。このようにすると、シフトレンジが前進レンジまたは後退レンジのとき、車両が停止した状態からブレーキペダル62の足を離すだけで、電動モータ3の発生トルクにより車両がクリープ走行するので、車庫入れや渋滞時の運転操作が容易となる。
【0090】
また、図13に示すように、ローラ係合保持トルクの大きさは、変速段に応じて設定することができる。このようにすると、ローラ係合保持制御が実行されるときの変速段にかかわらず、ローラ係合保持トルクの大きさを最適な大きさに調整することができる。
【符号の説明】
【0091】
1 前輪
2 後輪
3 電動モータ
6 ディファレンシャルギヤ
7 入力軸
8 出力軸
9A 1速入力ギヤ
9B 2速入力ギヤ
10A 1速出力ギヤ
10B 2速出力ギヤ
15 軸受
16A 1速の2ウェイローラクラッチ
16B 2速の2ウェイローラクラッチ
17 円筒面
19 カム面
20 ローラ
21A 1速保持器
21B 2速保持器
22A 1速スイッチばね
22B 2速スイッチばね
33 変速アクチュエータ
34 シフトリング
35A 1速摩擦板
35B 2速摩擦板
39A 1速離反ばね
39B 2速離反ばね
41 シフト機構
59 モータトルク制御装置
61 アクセルペダル
62 ブレーキペダル
A 車両用モータ駆動装置
E エンジン
EV 電気自動車
HV ハイブリッド自動車
【特許請求の範囲】
【請求項1】
電動モータ(3)と、
その電動モータ(3)の回転が入力される入力軸(7)と、
前記入力軸(7)に対して間隔をおいて平行に配置された出力軸(8)と、
前記入力軸(7)に設けられた第1入力ギヤ(9A)および第2入力ギヤ(9B)と、
前記出力軸(8)に設けられ、前記第1入力ギヤ(9A)および第2入力ギヤ(9B)にそれぞれ噛合する第1出力ギヤ(10A)および第2出力ギヤ(10B)と、
前記出力軸(8)の回転を左右の車輪に分配するディファレンシャルギヤ(6)と、
前記電動モータ(3)の発生トルクを制御するモータトルク制御装置(59)とを有し、
前記第1入力ギヤ(9A)と第2入力ギヤ(9B)と入力軸(7)の組と、前記第1出力ギヤ(10A)と第2出力ギヤ(10B)と出力軸(8)の組とのうち一方を、第1クラッチギヤ(10A)と第2クラッチギヤ(10B)とこれらのクラッチギヤ(10A,10B)を軸受(15)を介して回転可能に支持するクラッチギヤ支持軸(8)とし、
前記第1クラッチギヤ(10A)とクラッチギヤ支持軸(8)との間でトルクの伝達と遮断の切換えを行なう第1の2ウェイローラクラッチ(16A)と、前記第2クラッチギヤ(10B)とクラッチギヤ支持軸(8)との間でトルクの伝達と遮断の切換えを行なう第2の2ウェイローラクラッチ(16B)と、前記第1の2ウェイローラクラッチ(16A)と第2の2ウェイローラクラッチ(16B)とを選択的に係合させる変速アクチュエータ(33)を設け、
前記第1の2ウェイローラクラッチ(16A)は、第1クラッチギヤ(10A)の内周とクラッチギヤ支持軸(8)の外周のうち一方に設けられた円筒面(17)と、他方に設けられたカム面(19)と、そのカム面(19)と前記円筒面(17)の間に組み込まれたローラ(20)と、そのローラ(20)を保持し、前記カム面(19)と円筒面(17)の間にローラ(20)を係合させる係合位置とローラ(20)の係合を解除する中立位置との間で前記クラッチギヤ支持軸(8)に対して相対回転可能に設けられた第1保持器(21A)と、その第1保持器(21A)を前記中立位置に弾性保持する第1スイッチばね(22A)とからなり、
前記第2の2ウェイローラクラッチ(16B)は、第2クラッチギヤ(10B)の内周とクラッチギヤ支持軸(8)の外周のうち一方に設けられた円筒面(17)と、他方に設けられたカム面(19)と、そのカム面(19)と前記円筒面(17)の間に組み込まれたローラ(20)と、そのローラ(20)を保持し、前記カム面(19)と円筒面(17)の間にローラ(20)を係合させる係合位置とローラ(20)の係合を解除する中立位置との間で前記クラッチギヤ支持軸(8)に対して相対回転可能に設けられた第2保持器(21B)と、その第2保持器(21B)を前記中立位置に弾性保持する第2スイッチばね(22B)とからなり、
前記変速アクチュエータ(33)は、前記第1保持器(21A)に対して回り止めされかつ前記第1クラッチギヤ(10A)の側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた第1摩擦板(35A)と、その第1摩擦板(35A)を前記第1クラッチギヤ(10A)の側面から離反する方向に付勢する第1離反ばね(39A)と、前記第2保持器(21B)に対して回り止めされかつ前記第2クラッチギヤ(10B)の側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた第2摩擦板(35B)と、その第2摩擦板(35B)を前記第2クラッチギヤ(10B)の側面から離反する方向に付勢する第2離反ばね(39B)と、前記第1摩擦板(35A)を押圧して前記第1クラッチギヤ(10A)の側面に接触させる第1シフト位置と前記第2摩擦板(35B)を押圧して前記第2クラッチギヤ(10B)の側面に接触させる第2シフト位置との間で軸方向に移動可能に設けられたシフトリング(34)と、そのシフトリング(34)を軸方向に移動させるシフト機構(41)とからなり、
前記モータトルク制御装置(59)は、アクセルペダル(61)が踏み込まれているか否かを判定するアクセル操作判定手段(S3)と、そのアクセル操作判定手段(S3)でアクセルペダル(61)が踏み込まれていないと判定されたときに、現変速段の2ウェイローラクラッチ(16A)の保持器を係合位置から中立位置に戻そうとする前記スイッチばね(22A)の弾性力に抗して現変速段の2ウェイローラクラッチ(16A)の保持器(21A)を係合位置に保持するトルクを前記電動モータ(3)で発生するローラ係合保持制御を実行するローラ係合保持制御手段(S4)とを有する車両用モータ駆動装置。
【請求項2】
前記モータトルク制御装置(59)が、運転者のブレーキ操作量が予め設定されたしきい値(Th)よりも大きいか否かを判定するブレーキ操作判定手段(S2)を更に有し、
前記ローラ係合保持制御手段(S4)は、そのブレーキ操作判定手段(S2)で運転者のブレーキ操作量が前記しきい値(Th)よりも大きいと判定されたときに前記ローラ係合保持制御を解除する請求項1に記載の車両用モータ駆動装置。
【請求項3】
前記モータトルク制御装置(59)が、ブレーキペダル(62)が踏み込まれているか否か判定するブレーキ操作判定手段(S2)を更に有し、
前記ローラ係合保持制御手段(S4)は、そのブレーキ操作判定手段(S2)でブレーキペダル(62)が踏み込まれていると判定されたときに前記ローラ係合保持制御を解除する請求項1に記載の車両用モータ駆動装置。
【請求項4】
前記ローラ係合保持制御手段(S4)は、前記ローラ係合保持制御により前記電動モータ(3)で発生するトルクの大きさが、車速が速いほど大きく設定されている請求項1から3のいずれかに記載の車両用モータ駆動装置。
【請求項5】
前記ローラ係合保持制御手段(S4)は、前記ローラ係合保持制御により前記電動モータ(3)で発生するトルクの大きさが変速段に応じて設定されている請求項1から3のいずれかに記載の車両用モータ駆動装置。
【請求項6】
左右一対の前輪(1)と左右一対の後輪(2)のうち少なくとも一方を請求項1から5のいずれかに記載の車両用モータ駆動装置(A)で駆動するようにした電気自動車。
【請求項7】
左右一対の前輪(1)と左右一対の後輪(2)のうち一方をエンジン(E)で駆動し、他方を請求項1から5のいずれかに記載の車両用モータ駆動装置(A)で駆動するようにしたハイブリッド自動車。
【請求項1】
電動モータ(3)と、
その電動モータ(3)の回転が入力される入力軸(7)と、
前記入力軸(7)に対して間隔をおいて平行に配置された出力軸(8)と、
前記入力軸(7)に設けられた第1入力ギヤ(9A)および第2入力ギヤ(9B)と、
前記出力軸(8)に設けられ、前記第1入力ギヤ(9A)および第2入力ギヤ(9B)にそれぞれ噛合する第1出力ギヤ(10A)および第2出力ギヤ(10B)と、
前記出力軸(8)の回転を左右の車輪に分配するディファレンシャルギヤ(6)と、
前記電動モータ(3)の発生トルクを制御するモータトルク制御装置(59)とを有し、
前記第1入力ギヤ(9A)と第2入力ギヤ(9B)と入力軸(7)の組と、前記第1出力ギヤ(10A)と第2出力ギヤ(10B)と出力軸(8)の組とのうち一方を、第1クラッチギヤ(10A)と第2クラッチギヤ(10B)とこれらのクラッチギヤ(10A,10B)を軸受(15)を介して回転可能に支持するクラッチギヤ支持軸(8)とし、
前記第1クラッチギヤ(10A)とクラッチギヤ支持軸(8)との間でトルクの伝達と遮断の切換えを行なう第1の2ウェイローラクラッチ(16A)と、前記第2クラッチギヤ(10B)とクラッチギヤ支持軸(8)との間でトルクの伝達と遮断の切換えを行なう第2の2ウェイローラクラッチ(16B)と、前記第1の2ウェイローラクラッチ(16A)と第2の2ウェイローラクラッチ(16B)とを選択的に係合させる変速アクチュエータ(33)を設け、
前記第1の2ウェイローラクラッチ(16A)は、第1クラッチギヤ(10A)の内周とクラッチギヤ支持軸(8)の外周のうち一方に設けられた円筒面(17)と、他方に設けられたカム面(19)と、そのカム面(19)と前記円筒面(17)の間に組み込まれたローラ(20)と、そのローラ(20)を保持し、前記カム面(19)と円筒面(17)の間にローラ(20)を係合させる係合位置とローラ(20)の係合を解除する中立位置との間で前記クラッチギヤ支持軸(8)に対して相対回転可能に設けられた第1保持器(21A)と、その第1保持器(21A)を前記中立位置に弾性保持する第1スイッチばね(22A)とからなり、
前記第2の2ウェイローラクラッチ(16B)は、第2クラッチギヤ(10B)の内周とクラッチギヤ支持軸(8)の外周のうち一方に設けられた円筒面(17)と、他方に設けられたカム面(19)と、そのカム面(19)と前記円筒面(17)の間に組み込まれたローラ(20)と、そのローラ(20)を保持し、前記カム面(19)と円筒面(17)の間にローラ(20)を係合させる係合位置とローラ(20)の係合を解除する中立位置との間で前記クラッチギヤ支持軸(8)に対して相対回転可能に設けられた第2保持器(21B)と、その第2保持器(21B)を前記中立位置に弾性保持する第2スイッチばね(22B)とからなり、
前記変速アクチュエータ(33)は、前記第1保持器(21A)に対して回り止めされかつ前記第1クラッチギヤ(10A)の側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた第1摩擦板(35A)と、その第1摩擦板(35A)を前記第1クラッチギヤ(10A)の側面から離反する方向に付勢する第1離反ばね(39A)と、前記第2保持器(21B)に対して回り止めされかつ前記第2クラッチギヤ(10B)の側面に接触する位置と離反する位置との間で軸方向に移動可能に設けられた第2摩擦板(35B)と、その第2摩擦板(35B)を前記第2クラッチギヤ(10B)の側面から離反する方向に付勢する第2離反ばね(39B)と、前記第1摩擦板(35A)を押圧して前記第1クラッチギヤ(10A)の側面に接触させる第1シフト位置と前記第2摩擦板(35B)を押圧して前記第2クラッチギヤ(10B)の側面に接触させる第2シフト位置との間で軸方向に移動可能に設けられたシフトリング(34)と、そのシフトリング(34)を軸方向に移動させるシフト機構(41)とからなり、
前記モータトルク制御装置(59)は、アクセルペダル(61)が踏み込まれているか否かを判定するアクセル操作判定手段(S3)と、そのアクセル操作判定手段(S3)でアクセルペダル(61)が踏み込まれていないと判定されたときに、現変速段の2ウェイローラクラッチ(16A)の保持器を係合位置から中立位置に戻そうとする前記スイッチばね(22A)の弾性力に抗して現変速段の2ウェイローラクラッチ(16A)の保持器(21A)を係合位置に保持するトルクを前記電動モータ(3)で発生するローラ係合保持制御を実行するローラ係合保持制御手段(S4)とを有する車両用モータ駆動装置。
【請求項2】
前記モータトルク制御装置(59)が、運転者のブレーキ操作量が予め設定されたしきい値(Th)よりも大きいか否かを判定するブレーキ操作判定手段(S2)を更に有し、
前記ローラ係合保持制御手段(S4)は、そのブレーキ操作判定手段(S2)で運転者のブレーキ操作量が前記しきい値(Th)よりも大きいと判定されたときに前記ローラ係合保持制御を解除する請求項1に記載の車両用モータ駆動装置。
【請求項3】
前記モータトルク制御装置(59)が、ブレーキペダル(62)が踏み込まれているか否か判定するブレーキ操作判定手段(S2)を更に有し、
前記ローラ係合保持制御手段(S4)は、そのブレーキ操作判定手段(S2)でブレーキペダル(62)が踏み込まれていると判定されたときに前記ローラ係合保持制御を解除する請求項1に記載の車両用モータ駆動装置。
【請求項4】
前記ローラ係合保持制御手段(S4)は、前記ローラ係合保持制御により前記電動モータ(3)で発生するトルクの大きさが、車速が速いほど大きく設定されている請求項1から3のいずれかに記載の車両用モータ駆動装置。
【請求項5】
前記ローラ係合保持制御手段(S4)は、前記ローラ係合保持制御により前記電動モータ(3)で発生するトルクの大きさが変速段に応じて設定されている請求項1から3のいずれかに記載の車両用モータ駆動装置。
【請求項6】
左右一対の前輪(1)と左右一対の後輪(2)のうち少なくとも一方を請求項1から5のいずれかに記載の車両用モータ駆動装置(A)で駆動するようにした電気自動車。
【請求項7】
左右一対の前輪(1)と左右一対の後輪(2)のうち一方をエンジン(E)で駆動し、他方を請求項1から5のいずれかに記載の車両用モータ駆動装置(A)で駆動するようにしたハイブリッド自動車。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2012−219850(P2012−219850A)
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願番号】特願2011−83518(P2011−83518)
【出願日】平成23年4月5日(2011.4.5)
【出願人】(000102692)NTN株式会社 (9,006)
【Fターム(参考)】
【公開日】平成24年11月12日(2012.11.12)
【国際特許分類】
【出願日】平成23年4月5日(2011.4.5)
【出願人】(000102692)NTN株式会社 (9,006)
【Fターム(参考)】
[ Back to top ]