
車両用リフト装置
【課題】重心に偏りのある車両であっても車両を水平に保ちながら昇降させることができ、かつそのための機構が簡単で、適用可能な車両の大きさに柔軟に対応することのできる車両用リフト装置を提供する。
【解決手段】車両の前後をそれぞれ支持して昇降可能な昇降体を設け、該各昇降体それぞれに昇降体を昇降させる駆動源を設けた車両用リフト装置において、前記各昇降体それぞれの側壁に昇降方向に沿って一定間隔毎に複数個の切り欠き部を設けるとともに、該切り欠き部に対向する位置に前記昇降体との間の距離を検出する距離センサを上下方向に複数個配置し、前記距離センサの検出結果に基づいて、前後それぞれの昇降体が昇降時に水平位置を保つように前記駆動源の作動を制御する制御手段を設けたことを特徴とする。
【解決手段】車両の前後をそれぞれ支持して昇降可能な昇降体を設け、該各昇降体それぞれに昇降体を昇降させる駆動源を設けた車両用リフト装置において、前記各昇降体それぞれの側壁に昇降方向に沿って一定間隔毎に複数個の切り欠き部を設けるとともに、該切り欠き部に対向する位置に前記昇降体との間の距離を検出する距離センサを上下方向に複数個配置し、前記距離センサの検出結果に基づいて、前後それぞれの昇降体が昇降時に水平位置を保つように前記駆動源の作動を制御する制御手段を設けたことを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用リフト装置に関するものであり、詳しくは自動車整備工場等において車両、特に大型トラック、バス、特殊車両等に使用され、車両の点検整備や修理等のため車両を昇降するための車両用リフト装置に関するものである。
【背景技術】
【0002】
自動車整備工場等において車両の点検整備や修理等を行う際、車両を昇降させる必要がある。そのため、従来より車両を昇降させるための車両用リフト装置として、2柱リフト装置が使用されている。2柱リフト装置は、車両の前後をそれぞれ支持して昇降可能としたリフト装置であり、例えば車両の前軸と後軸、また車両前部の車体と車両後部の車体をそれぞれ支持して車両を昇降する。このような2柱リフト装置を使用することで、大型トラック、バス、特殊車両等の車体が長く車軸間隔が長い大型車両であっても、車両の前後の支持位置間の距離を長くして保持することができるため、安全に車両を昇降することができる。
【0003】
また、自動車整備工場等で多く使用される2柱リフト装置として、固定リフトと移動リフトを備えた2柱リフト装置がある。このような2柱リフト装置は、固定リフトと移動リフト共に上部に受台が取り付けられており、該受台で車両を支持することができるように構成されている。また前記固定リフトは昇降が可能であり、前記移動リフトは昇降及び前記固定リフトと離接する方向への移動が可能に構成されている。
【0004】
このような固定リフトと移動リフトを備えた2柱リフト装置を用いて車両を昇降する場合、固定リフトを単独で昇降させて固定リフト上部の受台で車両前部を保持した後、前記移動リフトを車両後部支持部へ移動させてから移動リフトを単独で昇降させて移動リフト上部の受台で車両全部を保持する。その後、固定リフトと移動リフトを連動して昇降させることで車両の昇降を行っている。このように移動リフトを設けることで車長の異なる車両にも対応することができる。
【0005】
ところで、車両は通常エンジン等の車両構成部品やその他の付帯部品の配置に偏りがあるため、車両の前部又は後部のどちらか一方に重心が偏っている。とくに特殊車両やバスでその傾向が大きい。そのため前記2柱リフト装置を用いて重心が偏った車両を昇降させた場合、重心の偏っている側、即ち重い方が下に車両が傾斜してしまうため、車両を水平に保つ必要がある。
そのため、従来は車両前後の傾きを目視で確認し、車両が傾斜した場合には固定リフト又は移動リフトの昇降をそれぞれ単独で調節して車両の水平を保っている。
【0006】
しかしながら、前述の目視で水平を保つ方法は昇降中に作業員が最低1名現場に常駐しなくてはならないため工数がかかることに加え、目視で傾きを確認し水平を保つように固定リフト又は移動リフトの昇降を調整するためには熟練の技術が必要となる。
【0007】
また、固定リフトと移動リフトの昇降を機械的に同期させるためには、移動リフトが固定リフトと離接する方向へ移動するため同期装置が大きくなり設備コストが非常に大きくなる。
【0008】
また、車両用リフト装置として用いる2柱式リフト装置における車両の傾斜を防止する装置として、特許文献1には複数の油圧シリンダーを用いた油圧リフト装置において、前記複数の油圧シリンダーにそれぞれ油圧を供給する複数の油圧ポンプを共通の駆動源の出力軸に連結させた装置が開示されている。また、特許文献2には第1油圧シリンダー内のピストンの下側の下側油圧室を油圧ユニットに連通し、前記ピストンの上側の上側油圧室を第2油圧シリンダーの油圧室に連通した2柱リフトにおいて、前記第2油圧シリンダー内に、該第2油圧シリンダー内を上下動するラムの端面に圧接するスプリングを設けた装置が開示されている。
【0009】
【特許文献1】特開平8−231195号公報
【特許文献2】特開2005−206288号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
しかしながら、特許文献1に開示された装置では車両の重心の偏りにともなうリフト上での車両の傾斜を完全に防止することができない。さらに車両の傾斜が生じた場合に油圧シリンダーにそれぞれ油圧を供給する複数の油圧ポンプを共通の駆動源の出力軸に連結させているため、一方のリフトのみ単独で昇降させて調節することが簡単にできない。つまり、傾斜の防止及び傾斜が生じた場合の対策に課題が残る。
【0011】
また、特許文献2に開示された装置はリフトの位置を移動させることができないため、固定リフトと移動リフトを設けた2柱式リフトに採用することはできず、昇降する車両の大きさが限定されてしまう。さらに車両の傾斜が生じた場合に、2つのシリンダーを常時同期させているため、一方のリフトのみ単独で昇降させて調節することができない。つまり、適用可能な車両の大きさ及び傾斜が生じた場合の対策に課題が残る。
【0012】
従って、本発明はかかる従来技術の問題に鑑み、重心に偏りのある車両であっても車両を水平に保ちながら昇降させることができ、かつそのための機構が簡単で、適用可能な車両の大きさに柔軟に対応することのできる車両用リフト装置を提供することを目的とする。
【課題を解決するための手段】
【0013】
上記課題を解決するため本発明においては、
車両の前後をそれぞれ支持して昇降可能な昇降体を設け、該各昇降体それぞれに昇降体を昇降させる駆動源を設けた車両用リフト装置において、前記各昇降体それぞれの側壁に昇降方向に沿って一定間隔毎に複数個の切り欠き部を設けるとともに、該切り欠き部に対向する位置に前記昇降体との間の距離を検出する距離センサを上下方向に複数個配置し、前記距離センサの検出結果に基づいて、前後それぞれの昇降体が昇降時に水平位置を保つように前記駆動源の作動を制御する制御手段を設けたことを特徴とする。
【0014】
昇降体の側壁に昇降方向に沿って一定間隔毎に複数個の切り欠き部を設け、該切り欠き部に対向する位置に前記昇降体との間の距離を検出する距離センサを上下方向に複数個配置することで、前記距離センサと昇降体の間の距離が昇降体の昇降に伴って変化するため、距離センサの検出結果から昇降体の移動量がわかる。特に、距離センサを上下方向に複数個配置しているため、複数の距離センサそれぞれの検出結果を用いて昇降体の移動量が正確に分かる。そして、制御手段によってそれぞれの昇降体の移動量が同じになるように各昇降体に設けた駆動源をそれぞれ制御することで昇降体が昇降時に水平を保つことができる。
なお、距離センサは非接触式の磁気センサを用いると消耗が少なく耐久性があるため好ましい。
【0015】
また、前記切り欠き部は昇降体側壁に直接設けてもよく、昇降体側壁に昇降方向にそって金属部材を取り付け該金属部材に切り欠き部を設けてもよい。
また車両用リフトではリフトの停止時に用いる安全装置として、昇降体側壁に設けられ昇降方向に沿って一定間隔毎に複数個の切り欠き部を設けた降下止めラックと前記切り欠き部に係合する降下止め爪からなる降下止め安全装置が多く採用されている。このような降下止め安全装置の降下止めラックを前記一定間隔毎に複数個の切り欠き部を設けた金属部材として兼用すると本発明を実施するためのコストが安くなるため好ましい。
【0016】
また、前記切り欠き部の形状は、前記昇降体昇降方向に直角に切り欠かれた直角面と、該直角面終端から昇降体側壁面に向かって下向き傾斜させた傾斜面から成ることを特徴とする。
このことにより、前記距離センサから昇降体の間の距離の変化が検知しやすくなるため、車両を水平に保つ精度がさらに向上する。
【0017】
また、前記距離センサは上下方向に2つ配置され、前記2つの距離センサからの検出信号に基づいて前記直角面の位置と、前記傾斜面の位置と、前記側壁面の位置とを判断する判断手段を備えたことを特徴とする。
距離センサを上下方向に2つ配置し、昇降体との間の距離の2つの検出結果に応じて、上側距離センサ及び下側距離センサが何れも切り欠き部を有さない部分と対向している場合、上側距離センサが切り欠き部を設けない部分と対向し下側距離センサが傾斜面と対向している場合、上側距離センサ及び下側距離センサが何れも傾斜面と対向している場合、上側距離センサ傾斜面と対向し下側距離センサが切り欠き部を設けない部分と対向している場合を判断することができるため、2つのセンサのみで前記切り欠き部の間隔よりも小さな昇降体の移動量が分かり、車両をさらに正確に水平に保つことができる。
【0018】
また、前記駆動源は前記昇降体をロッドとする油圧シリンダであり、前記駆動源の作動の制御は油圧シリンダへのオイル供給ポンプの運転及び停止の切り替えによって行うことを特徴とする。
このことにより、昇降体を昇降させるためにインバータ制御を行う必要がなく、小型のオイル供給ポンプで制御を行うことができ、省スペース化及びイニシャルコストとランニングコストの省コスト化が可能となる。
【0019】
また、前記各昇降体それぞれに、昇降体が降下最下部に到達したことを検出する下限センサと、2つの昇降体の何れか一方が前記下限センサにより降下最下部に到達したことを検出した場合に前記距離センサの検出結果に基づく制御を停止させる手段を設けたことを特徴とする。
リフト下降時は、一方のリフトの下降が速く移動量が大きくなると、移動量の大きいリフトの下降をストップし、移動量の小さいリフトのみを下降させる。そして2つのリフトの移動量が同じになると再度両方のリフトを下降させる。車体や車軸の受台の高さ調整にもよるが、下降制御のため動作中のリフトの車両のタイヤがフロアに着地した場合には制御が止まってしまうため、一方の昇降体が最下部に到達したことを下限センサによって検知して、自動的に水平同期を解除して下降信号のままで固定リフトと移動リフトの下降を続けて、車両をフロアに着地させることで安全性を高めている。
【発明の効果】
【0020】
以上記載のごとく本発明によれば、重心に偏りのある車両であっても車両を水平に保ちながら昇降させることができ、かつそのための機構が簡単で、適用可能な車両の大きさに柔軟に対応することのできる車両用リフト装置を提供することができる。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照して本発明の好適な実施例を例示的に詳しく説明する。但しこの実施例に記載されている構成部品の寸法、材質、形状、その相対的配置等は特に特定的な記載がない限りは、この発明の範囲をそれに限定する趣旨ではなく、単なる説明例に過ぎない。
【実施例1】
【0022】
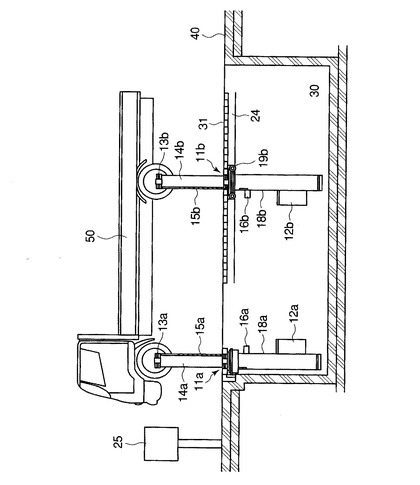
図1は、実施例1に係る装置構成図である。以下図1に基づいて装置構成について説明する。図1において40は自動車工場等の作業場の床面、30は該床面1に形成されたピットを示しており、ピット30内に固定リフト11a及び移動リフト11bが設けられている。また25は各種機器を制御、操作する制御操作盤である。
【0023】
固定リフト11aは、油圧シリンダー18aと、該油圧シリンダー18a内に上下方向に移動可能に挿入されたラム14aと、前記油圧シリンダー18a内に油圧を供給しラム14aを昇降させる油圧ユニット12aから主構成されている。またラム14aの上端では車両50の前軸13aを支持しており、車両の点検整備や修理等を行う際に車両50前部は前軸13aで支持されて昇降することとなる。また、ラム14aの側壁面には昇降方向に沿って一定間隔毎に複数個の切り欠き部を設けた降下止めラック15aが取り付けられており、車体の昇降を行わない時には該降下止めラック15aの切り欠き部に降下止め安全装置16aに設けた前記切り欠き部に係合する降下止め爪を係合させてラム14aの降下を防止している。
【0024】
また移動リフト11bは、油圧シリンダー18bと、該油圧シリンダー18b内に上下方向に移動可能に挿入されたラム14bと、前記油圧シリンダー18b内に油圧を供給しラム14bを昇降させる油圧ユニット12bから主構成されている。またラム14bの上端では車両50の後軸13bを支持しており、車両の点検整備や修理等を行う車両50後部は支持体13bで支持されて昇降することとなる。また、ラム14bの側壁面には昇降方向に沿って一定間隔毎に複数個の切り欠き部を設けた降下止めラック15bが取り付けられており、車体の昇降を行わない時には該降下止めラック15bの切り欠き部に降下止め安全装置16bに設けた前記切り欠き部に係合する降下止め爪を係合させてラム14bの降下を防止している。
【0025】
さらに移動リフト11bには、車輪19bが設けられており、該車輪19bが前記作業場の床面1に設けたピット30の開口部をカバーするピットカバー31に設けられた走行レール上を走行することで移動リフト11bは固定リフト11aと離接する方向へ移動可能に構成されている。このように移動リフト11bを固定リフト11aと離接する方向へ移動することで前軸と後軸間が異なる車両でも車両の前軸と後軸を支持することができるため、リフトを適用できる車両の種類が多くなる。
【0026】
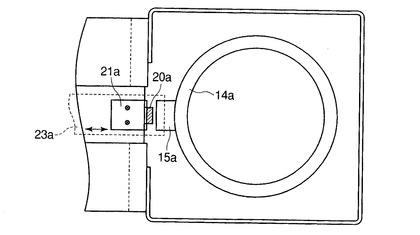
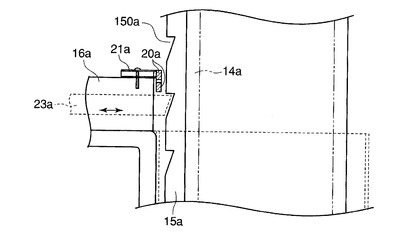
図2は本実施例に係る固定リフト11aに設けた安全装置16a周辺の平面図、図3は本実施例に係る固定リフト11aに設けた安全装置16a周辺の立面図である。以下図2及び図3に基づいて安全装置16a周辺の構成について説明する。なお、本実施例においては固定リフト11aに設けた安全装置16a周辺についてのみ図2及び図3を用いて説明するが、移動リフト11bに設けた安全装置16b周辺についても同じ構造である。
【0027】
前述のように、ラム14aの側壁面には昇降方向に沿って一定間隔毎に複数個の切り欠き部150aを設けた降下止めラック15aが取り付けられており、車体の昇降を行わない時には該降下止めラック15aの切り欠き部150aに、降下止め安全装置16aに設けた前記切り欠き部150aに係合する降下止め爪23aを係合させてラム14aの降下を防止している。なお降下止め爪23aは降下止めラック15aと離接する方向へ移動自由に形成されており、車体の下降を行う際には、前記降下止め爪23aを降下止めラック15aから離れる方向に移動させて切り欠き部150aと係合しないようにする。
【0028】
本発明の特徴的な構成として、降下止め安全装置16aにセンサーブラケット21aをピン止めし、該センサーブラケット21aに2つの距離センサ20aを降下止めラック15aと対向する位置に上下方向に取り付けている。距離センサ20aによって距離センサと降下止めラック15aの高さ位置を検出することができる。この高さ位置の検出については後述する。
【0029】
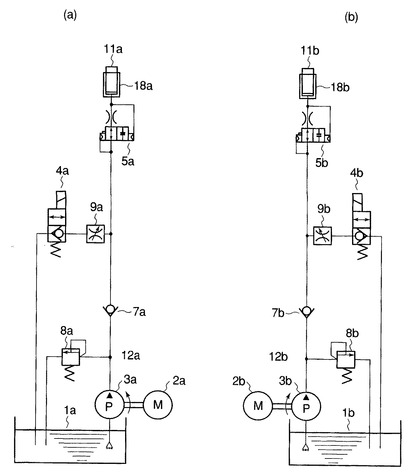
図4(a)は、固定リフト11aの油圧回路を示し、図4(b)は、移動リフト11bの油圧回路を示す。
図4(a)において、作動油が貯留されているオイルタンク1aから、モータ2aによって作動されるオイルポンプ3aによって汲み上げられて、チックバルブ7aおよび落下防止バルブ5aを介して、固定リフト用油圧シリンダ18aに供給される。また、油圧ポンプ3aの出力側にはリミッタバルブ8aが設置されてオイルタンク1aに戻すようになっていて、固定リフト用油圧シリンダ18aに供給される油圧を一定値に保持して、固定リフト11aの上昇速度を一定に保持している。
【0030】
落下防止バルブ5aは、連通状態と遮断状態とを切替えるようになっていて、固定リフト11aが所定の昇降速度であるときには連通しているが、例えば配管洩れなどで急速下降した場合に、固定リフト用油圧シリンダ18aへの連通油路を遮断することで、固定リフト用油圧シリンダ18aに供給される作動油の排出を停止して、該油圧シリンダ18a内に作動油を保持して固定リフト11aが不要に下降することを防止している。
【0031】
また、落下防止バルブ5aの下流側には絞り9aおよびリフトバルブ4aが直列に配置されている。このリフトバルブ4aは連通状態とチェックバルブを介しての遮断状態とを切替えるようになっていて、固定リフト11aの下降時に、リフトバルブ4aを開いて、固定リフト用油圧シリンダ18aに供給される作動油を、オイルタンク1aへ戻すようになっている。
図4(b)に示す移動リフト11bの油圧回路も、固定リフト11aの油圧回路と同様に構成されている。
【0032】
固定リフト11aの上昇作動時には、モータ2aをONにして一定回転でモータを駆動することによってホンプ3aを作動して、ポンプ3aの吐出圧油を固定リフト用油圧シリンダ18aに供給する。
固定リフト11aの停止時には、モータ2aをOFFしてポンプ3aを非作動にする。
固定リフト11aの下降作動時には、リフトバルブ4aを開いて、固定リフト用油圧シリンダ18aに供給され作動油を、オイルタンク1aへ戻す。
なお、モータ3aは、負荷に応じて回転数を制御する等の制御装置は設けられなく、ON時には一定回転で回転するような簡単な制御が設けられているだけであり、構造簡単で軽量で安価なモータおよび制御回路からなる駆動源を構成することを可能にしている。
【0033】
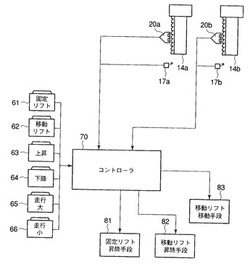
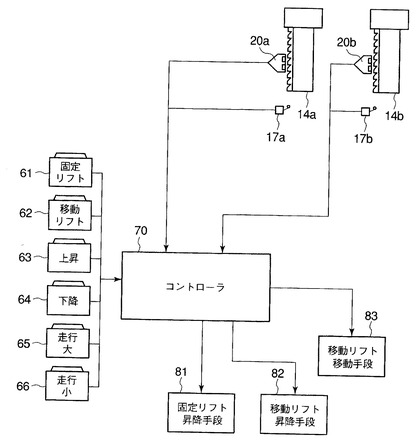
以上のように構成された油圧回路を用いて、固定リフト11aと移動リフト11bとの水平同期制御について、図5を参照して説明する。
操作パネル25等の操作ボタンから、固定リフト信号61、移動リフト信号62、上昇信号63、下降信号64、走行大信号65、走行小信号66がコントローラ(制御手段)70に入力される。
【0034】
固定リフト信号61が入力されると、前記固定リフト11aの油圧回路からなる固定リフト昇降手段81を作動させて固定リフト11aだけを単独で上昇、下降可能にするものである。
移動リフト信号62が入力されると、前記移動リフト11bの油圧回路からなる移動リフト昇降手段82を作動させて、移動リフト11bだけを単独で上昇、下降可能にするものである。
【0035】
前記固定リフト信号61及び移動リフト信号62が入力されているときに上昇信号63が入力されると、固定リフト11aと移動リフト11bとを水平同期させて上昇させる制御がなされ、また、下降信号64が入力されると、固定リフト11aと移動リフト11bとを同期させて下降させる制御がなされる。
【0036】
走行大信号65、走行小信号66がそれぞれ入力されると、移動リフト11bの前後移動ができ、移動リフト移動手段83を作動させて前後方向位置を移動させて、車両の前後車軸位置等の適切なリフト位置に合わせることができる。
【0037】
また、固定リフト11a、移動リフト11bのそれぞれの最下位置には、リフトの昇降体であるラム14aが、最下位置に到達したことを検出する下限センサ17a、17bが設けられて、該下限センサ17a又は17bによって下限位置が検出されたときには、前記した昇降制御が停止されることによって、リフト装置の安全性を確保している。
【0038】
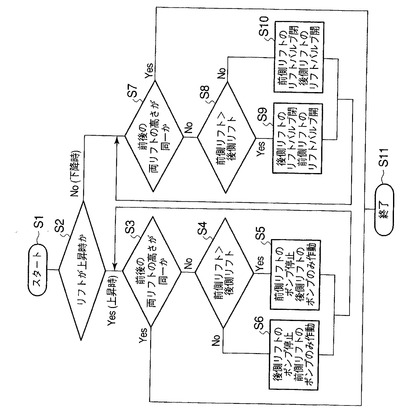
前記上昇信号63、下降信号64が入力されて、水平同期運転がされる場合の制御について図6を参照して説明する。
【0039】
まず、ステップS1でスタートすると、ステップS2で上昇信号63および下降信号64の入力を基に固定リフト11aおよび移動リフト11bが上昇中であるかどうかかが判断される。上昇時であると判断した場合には、次のステップS3で固定リフト11aと移動リフト11bとの上昇位置をそれぞれのリフトに設置された距離センサ20a、20bによって検出された、検出信号に基づいて判断する。この位置検出および位置の一致の判断については後述する。
【0040】
ステップS3で固定リフト11aと移動リフト11bとの上昇位置が同一と判断した場合には、S11に進み終了し、同一でないと判断した場合には、ステップS4で、前側に設置されている固定リフト11aの上昇位置が、後側に設置されている移動リフト11bの上昇位置より高いかを判断する。高い場合には、ステップS5に進み前側の固定リフト11aの作動モータ2aを停止してポンプ3aの作動を停止する。そして後側の移動リフト11bのみを上昇させて、ステップS3に戻って同一高さになったかを判断する。
【0041】
ステップS4で、前側に設置されている固定リフト11aの上昇位置が、後側に設置されている移動リフト11bの上昇位置より低い場合には、ステップS6に進み、後側の移動リフト11bの作動モータ2bを停止してポンプ3bの作動を停止する。そして前側の固定リフト11aのみを上昇させて、ステップS3に戻って同一高さになったかを判断する。
そして、このステップS3〜S6の作動を固定リフト11aと移動リフト11bとの上昇位置が同一と判断されるまで繰り返す。
そして、同一高さと判断されるとステップS11で終了して、さらに前側と後側とのポンプ3a及び3bを作動させて上昇作動が引き続き行なわれる。
【0042】
次に、ステップS2で、下降信号64の入力を基に前後の両リフトがともに下降時である場合には、ステップS7で、固定リフト11aと移動リフト11bとの下降位置をそれぞれのリフトに設置された距離センサ20a、20bによって検出された、検出信号に基づいて判断する。
【0043】
ステップS7で固定リフト11aと移動リフト11bとの下降位置が同一と判断した場合には、S11に進み終了し、同一でないと判断した場合には、ステップS8で、前側の固定リフト11aの下降位置が、後側の移動リフト11bの下降位置より高いかを判断する。
高い位置にある場合、すなわち、後側の移動リフト11bの下降速度が前側より速い場合には、ステップS9に進み後側の移動リフト11bのリフトバルブ4bの開作動を停止して、移動リフト用油圧シリンダ18bからオイルタンク1bへ作動油が戻るのを遮断して、前側の固定リフト11aのリフトバルブ4aのみを開とする。そしてステップS7に戻って同一高さになったかを判断する。
【0044】
ステップS8で、前側に設置されている固定リフト11aの下降位置が、後側に設置されている移動リフト11bの下降位置より低い場合には、すなわち、前側の固定リフト11aの下降速度が後側より速い場合には、ステップS10に進み前側の固定リフト11aのリフトバルブ4aの開作動を停止して、固定リフト用油圧シリンダ18aからオイルタンク1aへ作動油が戻るのを遮断して、後側の移動リフト11bのリフトバルブ4bのみを開としてステップS7に戻って同一高さになったかを判断する。
そして、このステップS7〜S10の作動を固定リフト11aと移動リフト11bとの下降位置が同一と判断されるまで繰り返す。
そして、同一高さと判断されるとステップS11で終了して、さらに前側と後側とのリフトバルブ4a及び4bを開いて下降作動が引き続き行なわれる。
【0045】
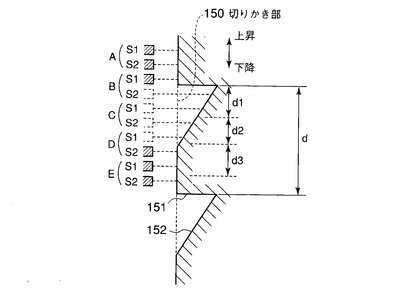
次に、図7を参照して、それぞれのリフトに設置された距離センサ20a、20bによって検出された、検出信号に基づいてリフトの位置検出および位置の一致の判断について説明する。
固定リフト11aおよび移動リフト11bにおける昇降体であるラム14a及び14bの側壁には一定間隔dで、複数個の切り欠き部150が形成されている。
この切り欠き部150の断面形状は、昇降方向に対して直角に切り欠かれた直角面151と、該直角面151の終端から昇降体であるラムの側壁面に向う傾斜面152とからなっている。直角面151が上方位置に傾斜面152が下方位置に位置されて形成されている。
【0046】
そして、昇降体であるラムの側壁面に対して一定の距離を存して対向するように上下に並んで距離センサ20a(S1、S2とする)が設置されて、距離センサS1、S2と対向する昇降体であるラムの側壁面との間の距離を検出している。
この距離センサS1、S2は、昇降体であるラムの側壁面の距離の位置より近い位置に物体がある場合にON信号を出力するようになっていて、同一の感度を有するセンサである。
【0047】
図7に示すように、固定リフト11aまたは移動リフト11bの昇降体であるラムが上昇、または下降した場合には、距離センサS1、S2によって検出される信号は表1のように、A点位置からE点位置に移動するに応じて順次ONとOFFの信号の組み合わせが変化する。
【0048】
【表1】

従って、距離センサS1、S2のON、OFF信号の組み合わせによって、昇降体であるラムの側壁に一定間隔dで形成されている切り欠き部150の位置を、間隔dの位置間隔で検出するのではなく、間隔dをさらに細分化して、位置C、位置D、位置Eの位置を検出することが可能になる。
【0049】
すなわち、従来1つのセンサでもって、切り欠き部150の位置を検出した場合には、昇降方向に対して直角に切り欠かれた直角面151の位置Bのみを検出することしか出来ず、位置検出精度が間隔dであったのに対して、本実施形態のように2つの距離センサS1、S2を上下に並設することによって、それぞれのセンサS1、S2の検出信号の組み合わせから、間隔dをBC間の間隔d1、CD間の距離d2、DE間の距離d3のように細分して位置を検出することができる。
【0050】
従って、図6のステップS3、S7における前後のリフトの位置検出を精度よく行なうことができるため、位置の一致の判断が精度よく行われるため、水平同期運転がスムーズにおこなわれ、前後のリフトにおける段差が大きくならずに安定した車両の上昇下降ができるようになる。
【産業上の利用可能性】
【0051】
重心に偏りのある車両であっても車両を水平に保ちながら昇降させることができ、かつそのための機構が簡単で、適用可能な車両の大きさに柔軟に対応することのできる車両用リフト装置として利用することができる。
【図面の簡単な説明】
【0052】
【図1】実施例1に係る装置構成図である。
【図2】固定リフトに設けた安全装置周辺の平面図である。
【図3】固定リフトに設けた安全装置周辺の立面図である。
【図4】図4(a)は、固定リフト11aの油圧回路であり、図4(b)は、移動リフト11bの油圧回路である。
【図5】固定リフトと移動リフトとの水平同期制御コントロール図である。
【図6】水平同期運転がされる場合の制御を示すフローチャートである。
【図7】リフトに設置された距離センサによって検出された検出信号に基づいてリフトの位置検出および位置の一致の判断について説明するための説明図である。
【符号の説明】
【0053】
11a 固定リフト
11b 移動リフト
14a、14b ラム(昇降体)
15a、15b 降下止めラック
16a、16b 降下止め安全装置
17a、17b 下限センサ
18a、18b 油圧シリンダー
20a、20b 距離センサ(近接センサ)
23a、23b 降下止め爪
70 コントローラ(制御手段)
150 切り欠き部
151 直角面
152 傾斜面
【技術分野】
【0001】
本発明は、車両用リフト装置に関するものであり、詳しくは自動車整備工場等において車両、特に大型トラック、バス、特殊車両等に使用され、車両の点検整備や修理等のため車両を昇降するための車両用リフト装置に関するものである。
【背景技術】
【0002】
自動車整備工場等において車両の点検整備や修理等を行う際、車両を昇降させる必要がある。そのため、従来より車両を昇降させるための車両用リフト装置として、2柱リフト装置が使用されている。2柱リフト装置は、車両の前後をそれぞれ支持して昇降可能としたリフト装置であり、例えば車両の前軸と後軸、また車両前部の車体と車両後部の車体をそれぞれ支持して車両を昇降する。このような2柱リフト装置を使用することで、大型トラック、バス、特殊車両等の車体が長く車軸間隔が長い大型車両であっても、車両の前後の支持位置間の距離を長くして保持することができるため、安全に車両を昇降することができる。
【0003】
また、自動車整備工場等で多く使用される2柱リフト装置として、固定リフトと移動リフトを備えた2柱リフト装置がある。このような2柱リフト装置は、固定リフトと移動リフト共に上部に受台が取り付けられており、該受台で車両を支持することができるように構成されている。また前記固定リフトは昇降が可能であり、前記移動リフトは昇降及び前記固定リフトと離接する方向への移動が可能に構成されている。
【0004】
このような固定リフトと移動リフトを備えた2柱リフト装置を用いて車両を昇降する場合、固定リフトを単独で昇降させて固定リフト上部の受台で車両前部を保持した後、前記移動リフトを車両後部支持部へ移動させてから移動リフトを単独で昇降させて移動リフト上部の受台で車両全部を保持する。その後、固定リフトと移動リフトを連動して昇降させることで車両の昇降を行っている。このように移動リフトを設けることで車長の異なる車両にも対応することができる。
【0005】
ところで、車両は通常エンジン等の車両構成部品やその他の付帯部品の配置に偏りがあるため、車両の前部又は後部のどちらか一方に重心が偏っている。とくに特殊車両やバスでその傾向が大きい。そのため前記2柱リフト装置を用いて重心が偏った車両を昇降させた場合、重心の偏っている側、即ち重い方が下に車両が傾斜してしまうため、車両を水平に保つ必要がある。
そのため、従来は車両前後の傾きを目視で確認し、車両が傾斜した場合には固定リフト又は移動リフトの昇降をそれぞれ単独で調節して車両の水平を保っている。
【0006】
しかしながら、前述の目視で水平を保つ方法は昇降中に作業員が最低1名現場に常駐しなくてはならないため工数がかかることに加え、目視で傾きを確認し水平を保つように固定リフト又は移動リフトの昇降を調整するためには熟練の技術が必要となる。
【0007】
また、固定リフトと移動リフトの昇降を機械的に同期させるためには、移動リフトが固定リフトと離接する方向へ移動するため同期装置が大きくなり設備コストが非常に大きくなる。
【0008】
また、車両用リフト装置として用いる2柱式リフト装置における車両の傾斜を防止する装置として、特許文献1には複数の油圧シリンダーを用いた油圧リフト装置において、前記複数の油圧シリンダーにそれぞれ油圧を供給する複数の油圧ポンプを共通の駆動源の出力軸に連結させた装置が開示されている。また、特許文献2には第1油圧シリンダー内のピストンの下側の下側油圧室を油圧ユニットに連通し、前記ピストンの上側の上側油圧室を第2油圧シリンダーの油圧室に連通した2柱リフトにおいて、前記第2油圧シリンダー内に、該第2油圧シリンダー内を上下動するラムの端面に圧接するスプリングを設けた装置が開示されている。
【0009】
【特許文献1】特開平8−231195号公報
【特許文献2】特開2005−206288号公報
【発明の開示】
【発明が解決しようとする課題】
【0010】
しかしながら、特許文献1に開示された装置では車両の重心の偏りにともなうリフト上での車両の傾斜を完全に防止することができない。さらに車両の傾斜が生じた場合に油圧シリンダーにそれぞれ油圧を供給する複数の油圧ポンプを共通の駆動源の出力軸に連結させているため、一方のリフトのみ単独で昇降させて調節することが簡単にできない。つまり、傾斜の防止及び傾斜が生じた場合の対策に課題が残る。
【0011】
また、特許文献2に開示された装置はリフトの位置を移動させることができないため、固定リフトと移動リフトを設けた2柱式リフトに採用することはできず、昇降する車両の大きさが限定されてしまう。さらに車両の傾斜が生じた場合に、2つのシリンダーを常時同期させているため、一方のリフトのみ単独で昇降させて調節することができない。つまり、適用可能な車両の大きさ及び傾斜が生じた場合の対策に課題が残る。
【0012】
従って、本発明はかかる従来技術の問題に鑑み、重心に偏りのある車両であっても車両を水平に保ちながら昇降させることができ、かつそのための機構が簡単で、適用可能な車両の大きさに柔軟に対応することのできる車両用リフト装置を提供することを目的とする。
【課題を解決するための手段】
【0013】
上記課題を解決するため本発明においては、
車両の前後をそれぞれ支持して昇降可能な昇降体を設け、該各昇降体それぞれに昇降体を昇降させる駆動源を設けた車両用リフト装置において、前記各昇降体それぞれの側壁に昇降方向に沿って一定間隔毎に複数個の切り欠き部を設けるとともに、該切り欠き部に対向する位置に前記昇降体との間の距離を検出する距離センサを上下方向に複数個配置し、前記距離センサの検出結果に基づいて、前後それぞれの昇降体が昇降時に水平位置を保つように前記駆動源の作動を制御する制御手段を設けたことを特徴とする。
【0014】
昇降体の側壁に昇降方向に沿って一定間隔毎に複数個の切り欠き部を設け、該切り欠き部に対向する位置に前記昇降体との間の距離を検出する距離センサを上下方向に複数個配置することで、前記距離センサと昇降体の間の距離が昇降体の昇降に伴って変化するため、距離センサの検出結果から昇降体の移動量がわかる。特に、距離センサを上下方向に複数個配置しているため、複数の距離センサそれぞれの検出結果を用いて昇降体の移動量が正確に分かる。そして、制御手段によってそれぞれの昇降体の移動量が同じになるように各昇降体に設けた駆動源をそれぞれ制御することで昇降体が昇降時に水平を保つことができる。
なお、距離センサは非接触式の磁気センサを用いると消耗が少なく耐久性があるため好ましい。
【0015】
また、前記切り欠き部は昇降体側壁に直接設けてもよく、昇降体側壁に昇降方向にそって金属部材を取り付け該金属部材に切り欠き部を設けてもよい。
また車両用リフトではリフトの停止時に用いる安全装置として、昇降体側壁に設けられ昇降方向に沿って一定間隔毎に複数個の切り欠き部を設けた降下止めラックと前記切り欠き部に係合する降下止め爪からなる降下止め安全装置が多く採用されている。このような降下止め安全装置の降下止めラックを前記一定間隔毎に複数個の切り欠き部を設けた金属部材として兼用すると本発明を実施するためのコストが安くなるため好ましい。
【0016】
また、前記切り欠き部の形状は、前記昇降体昇降方向に直角に切り欠かれた直角面と、該直角面終端から昇降体側壁面に向かって下向き傾斜させた傾斜面から成ることを特徴とする。
このことにより、前記距離センサから昇降体の間の距離の変化が検知しやすくなるため、車両を水平に保つ精度がさらに向上する。
【0017】
また、前記距離センサは上下方向に2つ配置され、前記2つの距離センサからの検出信号に基づいて前記直角面の位置と、前記傾斜面の位置と、前記側壁面の位置とを判断する判断手段を備えたことを特徴とする。
距離センサを上下方向に2つ配置し、昇降体との間の距離の2つの検出結果に応じて、上側距離センサ及び下側距離センサが何れも切り欠き部を有さない部分と対向している場合、上側距離センサが切り欠き部を設けない部分と対向し下側距離センサが傾斜面と対向している場合、上側距離センサ及び下側距離センサが何れも傾斜面と対向している場合、上側距離センサ傾斜面と対向し下側距離センサが切り欠き部を設けない部分と対向している場合を判断することができるため、2つのセンサのみで前記切り欠き部の間隔よりも小さな昇降体の移動量が分かり、車両をさらに正確に水平に保つことができる。
【0018】
また、前記駆動源は前記昇降体をロッドとする油圧シリンダであり、前記駆動源の作動の制御は油圧シリンダへのオイル供給ポンプの運転及び停止の切り替えによって行うことを特徴とする。
このことにより、昇降体を昇降させるためにインバータ制御を行う必要がなく、小型のオイル供給ポンプで制御を行うことができ、省スペース化及びイニシャルコストとランニングコストの省コスト化が可能となる。
【0019】
また、前記各昇降体それぞれに、昇降体が降下最下部に到達したことを検出する下限センサと、2つの昇降体の何れか一方が前記下限センサにより降下最下部に到達したことを検出した場合に前記距離センサの検出結果に基づく制御を停止させる手段を設けたことを特徴とする。
リフト下降時は、一方のリフトの下降が速く移動量が大きくなると、移動量の大きいリフトの下降をストップし、移動量の小さいリフトのみを下降させる。そして2つのリフトの移動量が同じになると再度両方のリフトを下降させる。車体や車軸の受台の高さ調整にもよるが、下降制御のため動作中のリフトの車両のタイヤがフロアに着地した場合には制御が止まってしまうため、一方の昇降体が最下部に到達したことを下限センサによって検知して、自動的に水平同期を解除して下降信号のままで固定リフトと移動リフトの下降を続けて、車両をフロアに着地させることで安全性を高めている。
【発明の効果】
【0020】
以上記載のごとく本発明によれば、重心に偏りのある車両であっても車両を水平に保ちながら昇降させることができ、かつそのための機構が簡単で、適用可能な車両の大きさに柔軟に対応することのできる車両用リフト装置を提供することができる。
【発明を実施するための最良の形態】
【0021】
以下、図面を参照して本発明の好適な実施例を例示的に詳しく説明する。但しこの実施例に記載されている構成部品の寸法、材質、形状、その相対的配置等は特に特定的な記載がない限りは、この発明の範囲をそれに限定する趣旨ではなく、単なる説明例に過ぎない。
【実施例1】
【0022】
図1は、実施例1に係る装置構成図である。以下図1に基づいて装置構成について説明する。図1において40は自動車工場等の作業場の床面、30は該床面1に形成されたピットを示しており、ピット30内に固定リフト11a及び移動リフト11bが設けられている。また25は各種機器を制御、操作する制御操作盤である。
【0023】
固定リフト11aは、油圧シリンダー18aと、該油圧シリンダー18a内に上下方向に移動可能に挿入されたラム14aと、前記油圧シリンダー18a内に油圧を供給しラム14aを昇降させる油圧ユニット12aから主構成されている。またラム14aの上端では車両50の前軸13aを支持しており、車両の点検整備や修理等を行う際に車両50前部は前軸13aで支持されて昇降することとなる。また、ラム14aの側壁面には昇降方向に沿って一定間隔毎に複数個の切り欠き部を設けた降下止めラック15aが取り付けられており、車体の昇降を行わない時には該降下止めラック15aの切り欠き部に降下止め安全装置16aに設けた前記切り欠き部に係合する降下止め爪を係合させてラム14aの降下を防止している。
【0024】
また移動リフト11bは、油圧シリンダー18bと、該油圧シリンダー18b内に上下方向に移動可能に挿入されたラム14bと、前記油圧シリンダー18b内に油圧を供給しラム14bを昇降させる油圧ユニット12bから主構成されている。またラム14bの上端では車両50の後軸13bを支持しており、車両の点検整備や修理等を行う車両50後部は支持体13bで支持されて昇降することとなる。また、ラム14bの側壁面には昇降方向に沿って一定間隔毎に複数個の切り欠き部を設けた降下止めラック15bが取り付けられており、車体の昇降を行わない時には該降下止めラック15bの切り欠き部に降下止め安全装置16bに設けた前記切り欠き部に係合する降下止め爪を係合させてラム14bの降下を防止している。
【0025】
さらに移動リフト11bには、車輪19bが設けられており、該車輪19bが前記作業場の床面1に設けたピット30の開口部をカバーするピットカバー31に設けられた走行レール上を走行することで移動リフト11bは固定リフト11aと離接する方向へ移動可能に構成されている。このように移動リフト11bを固定リフト11aと離接する方向へ移動することで前軸と後軸間が異なる車両でも車両の前軸と後軸を支持することができるため、リフトを適用できる車両の種類が多くなる。
【0026】
図2は本実施例に係る固定リフト11aに設けた安全装置16a周辺の平面図、図3は本実施例に係る固定リフト11aに設けた安全装置16a周辺の立面図である。以下図2及び図3に基づいて安全装置16a周辺の構成について説明する。なお、本実施例においては固定リフト11aに設けた安全装置16a周辺についてのみ図2及び図3を用いて説明するが、移動リフト11bに設けた安全装置16b周辺についても同じ構造である。
【0027】
前述のように、ラム14aの側壁面には昇降方向に沿って一定間隔毎に複数個の切り欠き部150aを設けた降下止めラック15aが取り付けられており、車体の昇降を行わない時には該降下止めラック15aの切り欠き部150aに、降下止め安全装置16aに設けた前記切り欠き部150aに係合する降下止め爪23aを係合させてラム14aの降下を防止している。なお降下止め爪23aは降下止めラック15aと離接する方向へ移動自由に形成されており、車体の下降を行う際には、前記降下止め爪23aを降下止めラック15aから離れる方向に移動させて切り欠き部150aと係合しないようにする。
【0028】
本発明の特徴的な構成として、降下止め安全装置16aにセンサーブラケット21aをピン止めし、該センサーブラケット21aに2つの距離センサ20aを降下止めラック15aと対向する位置に上下方向に取り付けている。距離センサ20aによって距離センサと降下止めラック15aの高さ位置を検出することができる。この高さ位置の検出については後述する。
【0029】
図4(a)は、固定リフト11aの油圧回路を示し、図4(b)は、移動リフト11bの油圧回路を示す。
図4(a)において、作動油が貯留されているオイルタンク1aから、モータ2aによって作動されるオイルポンプ3aによって汲み上げられて、チックバルブ7aおよび落下防止バルブ5aを介して、固定リフト用油圧シリンダ18aに供給される。また、油圧ポンプ3aの出力側にはリミッタバルブ8aが設置されてオイルタンク1aに戻すようになっていて、固定リフト用油圧シリンダ18aに供給される油圧を一定値に保持して、固定リフト11aの上昇速度を一定に保持している。
【0030】
落下防止バルブ5aは、連通状態と遮断状態とを切替えるようになっていて、固定リフト11aが所定の昇降速度であるときには連通しているが、例えば配管洩れなどで急速下降した場合に、固定リフト用油圧シリンダ18aへの連通油路を遮断することで、固定リフト用油圧シリンダ18aに供給される作動油の排出を停止して、該油圧シリンダ18a内に作動油を保持して固定リフト11aが不要に下降することを防止している。
【0031】
また、落下防止バルブ5aの下流側には絞り9aおよびリフトバルブ4aが直列に配置されている。このリフトバルブ4aは連通状態とチェックバルブを介しての遮断状態とを切替えるようになっていて、固定リフト11aの下降時に、リフトバルブ4aを開いて、固定リフト用油圧シリンダ18aに供給される作動油を、オイルタンク1aへ戻すようになっている。
図4(b)に示す移動リフト11bの油圧回路も、固定リフト11aの油圧回路と同様に構成されている。
【0032】
固定リフト11aの上昇作動時には、モータ2aをONにして一定回転でモータを駆動することによってホンプ3aを作動して、ポンプ3aの吐出圧油を固定リフト用油圧シリンダ18aに供給する。
固定リフト11aの停止時には、モータ2aをOFFしてポンプ3aを非作動にする。
固定リフト11aの下降作動時には、リフトバルブ4aを開いて、固定リフト用油圧シリンダ18aに供給され作動油を、オイルタンク1aへ戻す。
なお、モータ3aは、負荷に応じて回転数を制御する等の制御装置は設けられなく、ON時には一定回転で回転するような簡単な制御が設けられているだけであり、構造簡単で軽量で安価なモータおよび制御回路からなる駆動源を構成することを可能にしている。
【0033】
以上のように構成された油圧回路を用いて、固定リフト11aと移動リフト11bとの水平同期制御について、図5を参照して説明する。
操作パネル25等の操作ボタンから、固定リフト信号61、移動リフト信号62、上昇信号63、下降信号64、走行大信号65、走行小信号66がコントローラ(制御手段)70に入力される。
【0034】
固定リフト信号61が入力されると、前記固定リフト11aの油圧回路からなる固定リフト昇降手段81を作動させて固定リフト11aだけを単独で上昇、下降可能にするものである。
移動リフト信号62が入力されると、前記移動リフト11bの油圧回路からなる移動リフト昇降手段82を作動させて、移動リフト11bだけを単独で上昇、下降可能にするものである。
【0035】
前記固定リフト信号61及び移動リフト信号62が入力されているときに上昇信号63が入力されると、固定リフト11aと移動リフト11bとを水平同期させて上昇させる制御がなされ、また、下降信号64が入力されると、固定リフト11aと移動リフト11bとを同期させて下降させる制御がなされる。
【0036】
走行大信号65、走行小信号66がそれぞれ入力されると、移動リフト11bの前後移動ができ、移動リフト移動手段83を作動させて前後方向位置を移動させて、車両の前後車軸位置等の適切なリフト位置に合わせることができる。
【0037】
また、固定リフト11a、移動リフト11bのそれぞれの最下位置には、リフトの昇降体であるラム14aが、最下位置に到達したことを検出する下限センサ17a、17bが設けられて、該下限センサ17a又は17bによって下限位置が検出されたときには、前記した昇降制御が停止されることによって、リフト装置の安全性を確保している。
【0038】
前記上昇信号63、下降信号64が入力されて、水平同期運転がされる場合の制御について図6を参照して説明する。
【0039】
まず、ステップS1でスタートすると、ステップS2で上昇信号63および下降信号64の入力を基に固定リフト11aおよび移動リフト11bが上昇中であるかどうかかが判断される。上昇時であると判断した場合には、次のステップS3で固定リフト11aと移動リフト11bとの上昇位置をそれぞれのリフトに設置された距離センサ20a、20bによって検出された、検出信号に基づいて判断する。この位置検出および位置の一致の判断については後述する。
【0040】
ステップS3で固定リフト11aと移動リフト11bとの上昇位置が同一と判断した場合には、S11に進み終了し、同一でないと判断した場合には、ステップS4で、前側に設置されている固定リフト11aの上昇位置が、後側に設置されている移動リフト11bの上昇位置より高いかを判断する。高い場合には、ステップS5に進み前側の固定リフト11aの作動モータ2aを停止してポンプ3aの作動を停止する。そして後側の移動リフト11bのみを上昇させて、ステップS3に戻って同一高さになったかを判断する。
【0041】
ステップS4で、前側に設置されている固定リフト11aの上昇位置が、後側に設置されている移動リフト11bの上昇位置より低い場合には、ステップS6に進み、後側の移動リフト11bの作動モータ2bを停止してポンプ3bの作動を停止する。そして前側の固定リフト11aのみを上昇させて、ステップS3に戻って同一高さになったかを判断する。
そして、このステップS3〜S6の作動を固定リフト11aと移動リフト11bとの上昇位置が同一と判断されるまで繰り返す。
そして、同一高さと判断されるとステップS11で終了して、さらに前側と後側とのポンプ3a及び3bを作動させて上昇作動が引き続き行なわれる。
【0042】
次に、ステップS2で、下降信号64の入力を基に前後の両リフトがともに下降時である場合には、ステップS7で、固定リフト11aと移動リフト11bとの下降位置をそれぞれのリフトに設置された距離センサ20a、20bによって検出された、検出信号に基づいて判断する。
【0043】
ステップS7で固定リフト11aと移動リフト11bとの下降位置が同一と判断した場合には、S11に進み終了し、同一でないと判断した場合には、ステップS8で、前側の固定リフト11aの下降位置が、後側の移動リフト11bの下降位置より高いかを判断する。
高い位置にある場合、すなわち、後側の移動リフト11bの下降速度が前側より速い場合には、ステップS9に進み後側の移動リフト11bのリフトバルブ4bの開作動を停止して、移動リフト用油圧シリンダ18bからオイルタンク1bへ作動油が戻るのを遮断して、前側の固定リフト11aのリフトバルブ4aのみを開とする。そしてステップS7に戻って同一高さになったかを判断する。
【0044】
ステップS8で、前側に設置されている固定リフト11aの下降位置が、後側に設置されている移動リフト11bの下降位置より低い場合には、すなわち、前側の固定リフト11aの下降速度が後側より速い場合には、ステップS10に進み前側の固定リフト11aのリフトバルブ4aの開作動を停止して、固定リフト用油圧シリンダ18aからオイルタンク1aへ作動油が戻るのを遮断して、後側の移動リフト11bのリフトバルブ4bのみを開としてステップS7に戻って同一高さになったかを判断する。
そして、このステップS7〜S10の作動を固定リフト11aと移動リフト11bとの下降位置が同一と判断されるまで繰り返す。
そして、同一高さと判断されるとステップS11で終了して、さらに前側と後側とのリフトバルブ4a及び4bを開いて下降作動が引き続き行なわれる。
【0045】
次に、図7を参照して、それぞれのリフトに設置された距離センサ20a、20bによって検出された、検出信号に基づいてリフトの位置検出および位置の一致の判断について説明する。
固定リフト11aおよび移動リフト11bにおける昇降体であるラム14a及び14bの側壁には一定間隔dで、複数個の切り欠き部150が形成されている。
この切り欠き部150の断面形状は、昇降方向に対して直角に切り欠かれた直角面151と、該直角面151の終端から昇降体であるラムの側壁面に向う傾斜面152とからなっている。直角面151が上方位置に傾斜面152が下方位置に位置されて形成されている。
【0046】
そして、昇降体であるラムの側壁面に対して一定の距離を存して対向するように上下に並んで距離センサ20a(S1、S2とする)が設置されて、距離センサS1、S2と対向する昇降体であるラムの側壁面との間の距離を検出している。
この距離センサS1、S2は、昇降体であるラムの側壁面の距離の位置より近い位置に物体がある場合にON信号を出力するようになっていて、同一の感度を有するセンサである。
【0047】
図7に示すように、固定リフト11aまたは移動リフト11bの昇降体であるラムが上昇、または下降した場合には、距離センサS1、S2によって検出される信号は表1のように、A点位置からE点位置に移動するに応じて順次ONとOFFの信号の組み合わせが変化する。
【0048】
【表1】
従って、距離センサS1、S2のON、OFF信号の組み合わせによって、昇降体であるラムの側壁に一定間隔dで形成されている切り欠き部150の位置を、間隔dの位置間隔で検出するのではなく、間隔dをさらに細分化して、位置C、位置D、位置Eの位置を検出することが可能になる。
【0049】
すなわち、従来1つのセンサでもって、切り欠き部150の位置を検出した場合には、昇降方向に対して直角に切り欠かれた直角面151の位置Bのみを検出することしか出来ず、位置検出精度が間隔dであったのに対して、本実施形態のように2つの距離センサS1、S2を上下に並設することによって、それぞれのセンサS1、S2の検出信号の組み合わせから、間隔dをBC間の間隔d1、CD間の距離d2、DE間の距離d3のように細分して位置を検出することができる。
【0050】
従って、図6のステップS3、S7における前後のリフトの位置検出を精度よく行なうことができるため、位置の一致の判断が精度よく行われるため、水平同期運転がスムーズにおこなわれ、前後のリフトにおける段差が大きくならずに安定した車両の上昇下降ができるようになる。
【産業上の利用可能性】
【0051】
重心に偏りのある車両であっても車両を水平に保ちながら昇降させることができ、かつそのための機構が簡単で、適用可能な車両の大きさに柔軟に対応することのできる車両用リフト装置として利用することができる。
【図面の簡単な説明】
【0052】
【図1】実施例1に係る装置構成図である。
【図2】固定リフトに設けた安全装置周辺の平面図である。
【図3】固定リフトに設けた安全装置周辺の立面図である。
【図4】図4(a)は、固定リフト11aの油圧回路であり、図4(b)は、移動リフト11bの油圧回路である。
【図5】固定リフトと移動リフトとの水平同期制御コントロール図である。
【図6】水平同期運転がされる場合の制御を示すフローチャートである。
【図7】リフトに設置された距離センサによって検出された検出信号に基づいてリフトの位置検出および位置の一致の判断について説明するための説明図である。
【符号の説明】
【0053】
11a 固定リフト
11b 移動リフト
14a、14b ラム(昇降体)
15a、15b 降下止めラック
16a、16b 降下止め安全装置
17a、17b 下限センサ
18a、18b 油圧シリンダー
20a、20b 距離センサ(近接センサ)
23a、23b 降下止め爪
70 コントローラ(制御手段)
150 切り欠き部
151 直角面
152 傾斜面
【特許請求の範囲】
【請求項1】
車両の前後をそれぞれ支持して昇降可能な昇降体を設け、該各昇降体それぞれに昇降体を昇降させる駆動源を設けた車両用リフト装置において、
前記各昇降体それぞれの側壁に昇降方向に沿って一定間隔毎に複数個の切り欠き部を設けるとともに、該切り欠き部に対向する位置に前記昇降体との間の距離を検出する距離センサを上下方向に複数個配置し、
前記距離センサの検出結果に基づいて、前後それぞれの昇降体が昇降時に水平位置を保つように前記駆動源の作動を制御する制御手段を設けたことを特徴とする車両用リフト装置。
【請求項2】
前記切り欠き部の形状は、前記昇降体昇降方向に直角に切り欠かれた直角面と、該直角面終端から昇降体側壁面に向かって下向き傾斜させた傾斜面から成ることを特徴とする請求項1記載の車両用リフト装置。
【請求項3】
前記距離センサは上下方向に2つ配置され、前記2つの距離センサからの検出信号に基づいて前記直角面の位置と、前記傾斜面の位置と、前記側壁面の位置とを判断する判断手段を備えたことを特徴とする請求項2記載の車両用リフト装置。
【請求項4】
前記駆動源は前記昇降体をロッドとする油圧シリンダであり、前記駆動源の作動の制御は油圧シリンダへのオイル供給ポンプの運転及び停止の切り替えによって行うことを特徴とする請求項1〜3何れかに記載の車両用リフト装置。
【請求項5】
前記各昇降体それぞれに、昇降体が降下最下部に到達したことを検出する下限センサと、2つの昇降体の何れか一方が前記下限センサにより降下最下部に到達したことを検出した場合に前記距離センサの検出結果に基づく制御を停止させる手段を設けたことを特徴とする請求項1〜4何れかに記載の車両用リフト装置。
【請求項1】
車両の前後をそれぞれ支持して昇降可能な昇降体を設け、該各昇降体それぞれに昇降体を昇降させる駆動源を設けた車両用リフト装置において、
前記各昇降体それぞれの側壁に昇降方向に沿って一定間隔毎に複数個の切り欠き部を設けるとともに、該切り欠き部に対向する位置に前記昇降体との間の距離を検出する距離センサを上下方向に複数個配置し、
前記距離センサの検出結果に基づいて、前後それぞれの昇降体が昇降時に水平位置を保つように前記駆動源の作動を制御する制御手段を設けたことを特徴とする車両用リフト装置。
【請求項2】
前記切り欠き部の形状は、前記昇降体昇降方向に直角に切り欠かれた直角面と、該直角面終端から昇降体側壁面に向かって下向き傾斜させた傾斜面から成ることを特徴とする請求項1記載の車両用リフト装置。
【請求項3】
前記距離センサは上下方向に2つ配置され、前記2つの距離センサからの検出信号に基づいて前記直角面の位置と、前記傾斜面の位置と、前記側壁面の位置とを判断する判断手段を備えたことを特徴とする請求項2記載の車両用リフト装置。
【請求項4】
前記駆動源は前記昇降体をロッドとする油圧シリンダであり、前記駆動源の作動の制御は油圧シリンダへのオイル供給ポンプの運転及び停止の切り替えによって行うことを特徴とする請求項1〜3何れかに記載の車両用リフト装置。
【請求項5】
前記各昇降体それぞれに、昇降体が降下最下部に到達したことを検出する下限センサと、2つの昇降体の何れか一方が前記下限センサにより降下最下部に到達したことを検出した場合に前記距離センサの検出結果に基づく制御を停止させる手段を設けたことを特徴とする請求項1〜4何れかに記載の車両用リフト装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−254825(P2008−254825A)
【公開日】平成20年10月23日(2008.10.23)
【国際特許分類】
【出願番号】特願2007−95591(P2007−95591)
【出願日】平成19年3月30日(2007.3.30)
【出願人】(000117467)安全自動車株式会社 (16)
【公開日】平成20年10月23日(2008.10.23)
【国際特許分類】
【出願日】平成19年3月30日(2007.3.30)
【出願人】(000117467)安全自動車株式会社 (16)
[ Back to top ]