
車両用仕様変更装置
【課題】自車両の仕様の設定を国境線等の付近で自動的かつ確実に変更することができる車両用仕様変更装置を提供する。
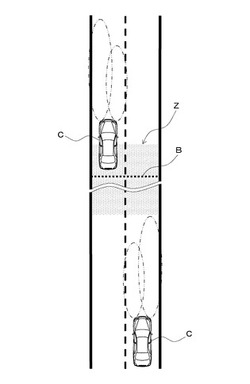
【解決手段】自車両Cが現走行地域の国境線Bを含むその前後の境界ゾーンZ内に進入すると、自車両Cが国境線Bを越えて現走行地域から隣接する走行予定地域に進行するか否かが推定される。そして、自車両Cが現走行地域から走行予定地域に進行するものと推定される場合には、境界ゾーンZ内において、自車両Cの左右のヘッドライトの光軸の仕様が現走行地域に対応した右側通行の設定から走行予定地域に対応した左側通行の設定に自動的に変更される。
【解決手段】自車両Cが現走行地域の国境線Bを含むその前後の境界ゾーンZ内に進入すると、自車両Cが国境線Bを越えて現走行地域から隣接する走行予定地域に進行するか否かが推定される。そして、自車両Cが現走行地域から走行予定地域に進行するものと推定される場合には、境界ゾーンZ内において、自車両Cの左右のヘッドライトの光軸の仕様が現走行地域に対応した右側通行の設定から走行予定地域に対応した左側通行の設定に自動的に変更される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用仕様変更装置に関し、詳しくは、自車両が走行する国や地域に対応した設定に自車両の仕様を変更する車両用仕様変更装置に関するものである。
【背景技術】
【0002】
道路を走行する車両の仕様のうち、設定の変更が可能な仕様については、その車両が主として使用される国や地域に対応した仕様に設定される。例えば、左右のヘッドライトの光軸や光量などの仕様は、その車両が使用される国や地域の交通法規に応じた右側通行または左側通行の何れかに対応するように設定される。
【0003】
ところで、車両が使用される国や地域の多くは、他の国や地域に陸続きで隣接しているため、その境界線(国境線)を越えて他の国や地域に車両を乗り入れることも多々ある。この場合、境界線(国境線)の前後で右側通行または左側通行の通行区分が異なるときには、境界線付近で左右のヘッドライトの光軸や光量などの設定を変更する必要も生じる。
【0004】
ここで、この種の車両の仕様変更に関する技術として、例えば特許文献1には、自車両の位置および自車両が存在する地域の地域情報に基づいて自車両の仕様の設定を変更するようにした車両の仕様変更装置が記載されている。また、特許文献2には、自車両の現在位置に基づいてその国に合った仕様データを取得することにより、自車両に搭載された制御機器の仕様を自動的に設定するようにした仕様設定装置が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−208194号公報
【特許文献2】特開2007−164347号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、特許文献1には、自車両の仕様の設定を国境線等の付近でリアルタイムに変更する手法についての開示がなく、この点で解決すべき課題がある。
【0007】
一方、特許文献2に記載された仕様設定装置では、自車両の仕様の設定を国境線等の付近でリアルタイムに自動的に変更することはできるものの、そのためには自車両をわざわざ停車させる必要があり、自車両を停車させることなく国境線等を越えた場合には、それ以前の仕様が継続されてしまうという不都合がある。
【0008】
そこで、本発明は、自車両の仕様の設定を国境線等の付近で自動的かつ確実に変更することができる車両用仕様変更装置を提供することを課題とする。
【課題を解決するための手段】
【0009】
本発明に係る車両用仕様変更装置は、自車両が走行する地域に対応した設定に自車両の仕様を変更する車両用仕様変更装置であって、自車両の現在位置の情報を取得する手段と、自車両が走行している現走行地域の境界線の位置情報を取得する手段と、自車両が境界線を含む所定の境界ゾーン内にあるか否かを判定する手段と、自車両が境界線を越えて現走行地域から隣接する走行予定地域に進行するか否かを推定する手段とを備え、自車両が現走行地域から隣接する走行予定地域に進行するものと推定される場合には、所定の境界ゾーン内にて自車両の仕様を現走行地域に対応した設定から走行予定地域に対応した設定に変更することを特徴とする。
【0010】
本発明に係る車両用仕様変更装置では、自車両が現走行地域の境界線を含む所定の境界ゾーン内に進入すると、自車両が境界線を越えて現走行地域から隣接する走行予定地域に進行するか否かが推定される。そして、自車両が現走行地域から走行予定地域に進行するものと推定される場合には、所定の境界エリア内にて自車両の仕様が現走行地域に対応した設定から走行予定地域に対応した設定に自動的に変更される。
【0011】
本発明の車両用仕様変更装置において、自車両が走行している現走行地域の境界線は例えば国境線であって、境界線を含む所定の境界ゾーンは、例えば車両の右側通行と左側通行とを変更するために国境線付近に設けられたゾーンとすることができる。
【0012】
そして、この場合に変更される自車両の仕様は、車両の右側通行と左側通行とに対応した仕様、例えば左右のヘッドライトの光軸や光量などの仕様、あるいはレーンキープアシスト制御の仕様とすることができる。
【0013】
本発明の車両用仕様変更装置においては、走行予定地域に対応して設定を変更すべき仕様に関する情報を外部情報源から取得するための通信手段を備えることができる。この場合、設定を変更すべき仕様に関する情報を通信手段により外部情報源から取得できるため、自車両側の記憶装置を低容量化することが可能となる。また、設定を変更すべき仕様に関する情報の更新も容易となる。
【0014】
本発明の車両用仕様変更装置において、例えば左右のヘッドライトの光軸や光量などの仕様の設定が所定の境界ゾーン内にて徐々に変更されると、ドライバに違和感を生じさせないので好ましい。また、例えばレーンキープアシスト制御の仕様の設定を変更する際には、車線変更中の誤動作を防止するため、レーンキープアシスト制御を一時中断するのが好ましい。
【発明の効果】
【0015】
本発明に係る車両用仕様変更装置では、自車両が現走行地域の境界線を含む所定の境界ゾーン内に進入した際、自車両が境界線を越えて現走行地域から隣接する走行予定地域に進行するものと推定されると、自車両の仕様が現走行地域に対応した設定から走行予定地域に対応した設定に自動的に変更される。従って、本発明によれば、自車両の仕様の設定を国境線等の付近で自動的かつ確実に変更することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施形態に係る車両用仕様変更装置の構成を示す機能ブロック図である。
【図2】一実施形態に係る車両用仕様変更装置が実行する処理の手順を示すフローチャートである。
【図3】一実施形態に係る車両用仕様変更装置の作用を示す国境付近の道路の平面図である。
【図4】一実施形態に係る車両用仕様変更装置の変形例の構成を示す機能ブロック図である。
【図5】本発明の他の実施形態に係る車両用仕様変更装置の作用を示す国境付近の道路の平面図である。
【発明を実施するための形態】
【0017】
以下、添付の図面を参照して本発明に係る車両用仕様変更装置を実施するための形態を順次説明する。なお、以下の説明において、同一または同様の構成要素については、同一の符号を付して重複した説明を省略することがある。
【0018】
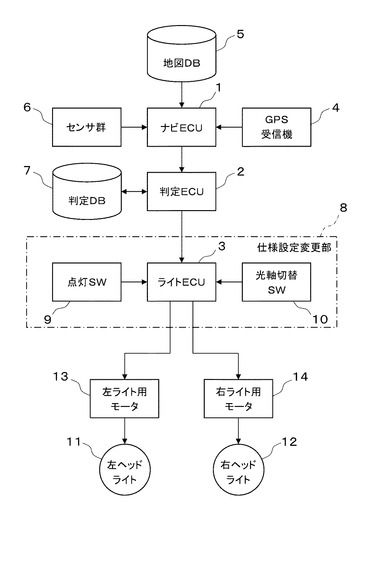
本発明の一実施形態に係る車両用仕様変更装置は、自車両の仕様のうち設定の変更が可能な仕様、例えば、左右のヘッドライトの光軸の仕様を自車両が走行する地域に対応した設定に自動的に変更する装置である。この車両用仕様変更装置は、例えば図1に示すように、ナビECU(Electronic Control Unit)1、判定ECU(Electronic Control Unit)2およびライトECU(Electronic Control Unit)3を制御ユニットとして備えている。
【0019】
ナビECU1、判定ECU2およびライトECU3は、それぞれ入出力インターフェースI/O、A/Dコンバータ、プログラムおよびデータを記憶したROM(Read Only Memory)、入力データ等を一時記憶するRAM(Random Access Memory)、プログラムを実行するCPU(Central Processing Unit)等をハードウェアとして備えたマイクロコンピュータで構成されている。
【0020】
ナビECU1は、ナビゲーションシステムを構成する制御ユニットであり、自車両の現在位置の情報をGPS(Global Positioning System)受信機4から取得する。また、このナビECU1は、自車両が走行している現走行地域の境界線(国境線)の位置情報と、その境界線(国境線)を含む前後の道路上の所定の境界ゾーンの位置情報とを地図DB(Data Base)5に記憶された国情報などを含む地図情報から取得する。
【0021】
また、ナビECU1は、方位センサー、車速センサーなどを含むセンサー群6から自車両の走行経路の情報を取得する。そして、このナビECU1は、取得した自車両の現在位置の情報と、自車両の現走行地域の境界線(国境線)の位置情報と、所定の境界ゾーンの位置情報と、自車両の走行経路の情報とを判定ECU2に送出する。
【0022】
判定ECU2は、ナビECU1から取得した各情報に基づき、自車両が道路上の境界線(国境線)を含むその前後の所定の境界ゾーン内にあるか否かを判定する。また、判定ECU2は、自車両の走行経路の情報を参照することにより、自車両が境界線(国境線)を越えて現走行地域から隣接する走行予定地域に進行するか否かを推定する。
【0023】
そして、この判定ECU2は、自車両が現走行地域から隣接する走行予定地域に進行するものと推定した場合、例えば左右のヘッドライトの光軸の仕様を切り替えて変更するための所定の変更情報を判定DB(Data Base)7から取得してライトECU3に送出する。
【0024】
ここで、判定DB(Data Base)7には、自車両が走行する可能性のある国または地域に対応した各種の仕様、例えば、左右のヘッドライトの光軸の仕様がその国または地域ごとに記憶されている。また、この光軸の仕様を徐々に切り替えて設定変更するための制御上必要な判定情報や、仕様の切り替え地点までの時間や距離の判定情報が記憶されている。
【0025】
ライトECU3は、仕様設定変更部8を構成する制御ユニットであり、手動式の点灯SW(スイッチ)9からのライト点灯指示信号と、手動式の光軸切替SW(スイッチ)10からの光軸切替指示信号とが入力される。このライトECU3は、点灯SW9からライト点灯指示信号が入力されると、左ヘッドライト11および右ヘッドライト12を所定の光量配分で点灯させる。
【0026】
ここで、左ヘッドライト11および右ヘッドライト12が点灯した状態において、判定ECU2からライトECU3に所定の変更情報が入力されると、ライトECU3は、左ヘッドライト11および右ヘッドライト12の光軸を調整するための左ライト用モータ13および右ライト用モータ14にそれぞれ所定の駆動信号を出力することで、左ヘッドライト11および右ヘッドライト12の光軸の仕様を相互に切り替えて変更する。
【0027】
また、ライトECU3は、左ヘッドライト11および右ヘッドライト12が点灯していない状態においても、光軸切替SW10から光軸切替指示信号が入力されると、左ライト用モータ13および右ライト用モータ14にそれぞれ所定の駆動信号を出力して左ヘッドライト11および右ヘッドライト12の光軸の仕様を相互に切り替える。
【0028】
次に、一実施形態の車両用仕様変更装置が実行する処理の手順を図2に示すフローチャートに沿って順次説明する。この車両用仕様変更装置は、図3に示すように、自車両Cが現走行地域から隣接する走行予定地域に国境線Bを越えて進行する際、左右のヘッドライトの光軸の仕様を右側通行の設定から左側通行の設定に切り替えるように一連の処理を実行する。
【0029】
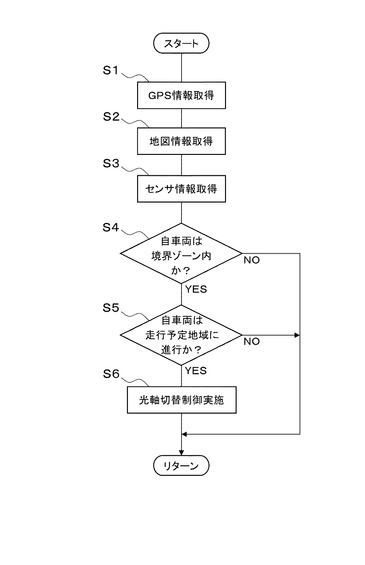
図2のフローチャートにおいて、ステップS1では、ナビECU1がGPS情報を取得する。すなわち、ナビECU1がGPS受信機4から自車両Cの現在位置の情報を取得する。
【0030】
ステップS2では、ナビECU1が地図情報を取得する。すなわち、ナビECU1が地図DB5に記憶された国情報などを含む地図情報からから自車両Cが走行している現走行地域の国境線Bの位置情報と、その国境線Bを含む前後の道路上の所定の境界ゾーンZの位置情報とを取得する。
【0031】
ステップS3では、ナビECU1がセンサ情報を取得する。すなわち、ナビECU1が方位センサー、車速センサーなどを含むセンサー群6から自車両の走行経路の情報を取得する。
【0032】
ステップS4において、判定ECU2は、ナビECU1から取得した自車両Cの現在位置の情報と、自車両Cが走行している現走行地域の国境線Bの位置情報と、国境線Bを含む所定の境界ゾーンZの位置情報とに基づき、自車両Cが道路上の国境線Bを含む所定の境界ゾーンZ内、すなわち、右側通行と左側通行とを変更するために設けられた境界ゾーンZ内にあるか否かを判定する。
【0033】
ステップS4の判定結果がNOであればリターンに進むが、判定結果がYESであれば、次のステップS5において、判定ECU2は、ナビECU1から取得した自車両Cの走行経路の情報に基づき、自車両Cが国境線Bを越えて現走行地域から隣接する走行予定地域に進行するか否かを推定する。
【0034】
ステップS5の判定結果がNOであればリターンに進むが、判定結果がYESであれば、仕様設定変更部8による光軸切替制御が実施される。まず、自車両Cの左右のヘッドライトの光軸の仕様を切り替えるための所定の変更情報を判定ECU2が判定DB7から取得してライトECU3に送出する。
【0035】
このとき、点灯SW9からライトECU3にライト点灯指示信号が入力されていると、ライトECU3は、左ライト用モータ13および右ライト用モータ14にそれぞれ所定の駆動信号を出力することで、図3に示すように、自車両Cの左ヘッドライト11および右ヘッドライト12の光軸の仕様を右側通行の設定から左側通行の設定に切り替える。
【0036】
ここで、このような光軸切替制御は、自車両Cのドライバに違和感を生じさせないように、手動式の点灯SW(スイッチ)9がオンされた状態において、右側通行と左側通行とを変更するために国境線B付近に設けられた境界ゾーンZ内で徐々に行われる。
【0037】
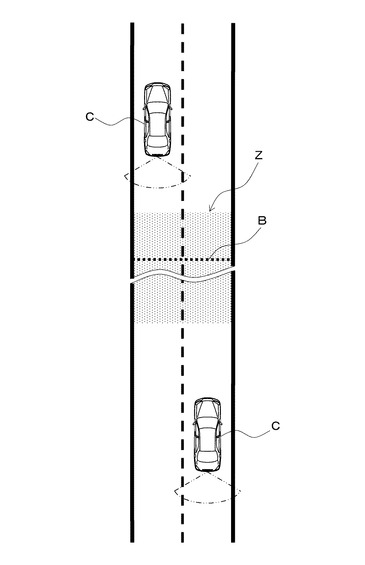
以上説明したように、一実施形態に係る車両用仕様変更装置では、図3に示すように、自車両Cが現走行地域の国境線Bを含むその前後の境界ゾーンZ内に進入すると、自車両Cが国境線Bを越えて現走行地域から隣接する走行予定地域に進行するか否かが推定される。そして、自車両Cが現走行地域から走行予定地域に進行するものと推定される場合には、境界ゾーンZ内において、自車両Cの左右のヘッドライトの光軸の仕様が現走行地域に対応した右側通行の設定から走行予定地域に対応した左側通行の設定に自動的に変更される。
【0038】
従って、一実施形態の車両用仕様変更装置によれば、自車両Cの左ヘッドライト11および右ヘッドライト12の光軸の仕様の設定を国境線Bの付近で自動的かつ確実に変更することができる。
【0039】
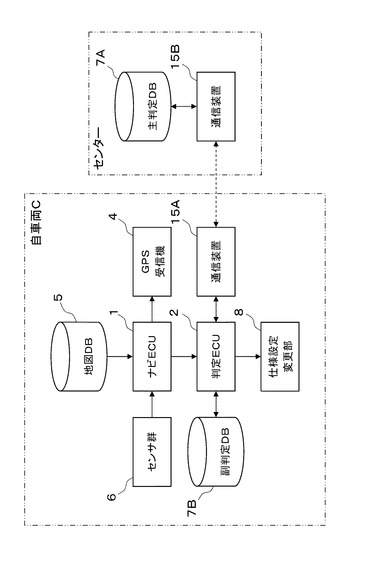
本発明に係る車両用仕様変更装置は、前述した一実施形態に限定されるものではない。例えば、図1に示した判定DB7は、図4に示すように、外部のセンターに外部情報源として設置される主判定DB7Aと、自車両C側に搭載される副判定DB7Bとに分割して構成してもよい。この場合、判定ECU2は、自車両C側の副判定DB7Bとの間で直接情報交換し、センター側の主判定DB7Aとの間では、路車間通信システム用などの適宜の通信装置15A,15Bを介して情報交換する。
【0040】
図4に示した構成の車両用仕様変更装置においては、自車両Cの設定を変更すべき仕様に関する情報などの大容量の情報をセンター側の主判定DB7Aに記憶させることができ、その分、自車両C側の副判定DB7Bを低容量化することができる。また、設定を変更すべき仕様に関する情報の更新もセンター側の主判定DB7Aにて容易に行うことができる。
【0041】
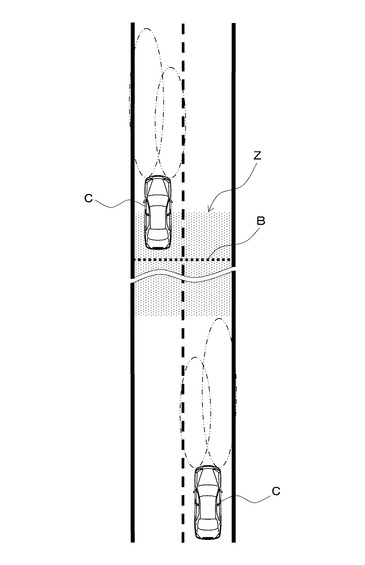
また、本発明に係る車両用仕様変更装置は、図5に示すように、自車両Cが現走行地域から隣接する走行予定地域に国境線Bを越えて進行する際、自車両Cの後部に装備したバックガイドカメラの画像認識に基づくレーンキープアシスト(LKA)制御の仕様を例えば右側通行の設定から左側通行の設定に切り替えるように構成することができる。
【0042】
すなわち、バックガイドカメラにより右側の実線のサイドラインと中央の点線のセンターラインとを画像認識する右側通行用のレーンキープアシスト(LKA)制御の仕様を左側の実線のサイドラインと中央の点線のセンターラインとを画像認識する左側通行用のレーンキープアシスト(LKA)制御の仕様に切り替えるように構成してもよい。この場合、自車両Cが右車線から左車線に車線変更する間の制御の誤動作を防止するため、レーンキープアシスト(LKA)制御は一時中断するのが好ましい。
【符号の説明】
【0043】
1…ナビECU、2…判定ECU、3…ライトECU、4…GPS受信機、5…地図DB、6…センサー群、7…判定DB、8…仕様設定変更部、9…点灯SW、10…光軸切替SW、11…左ヘッドライト、12…右ヘッドライト、13…左ライト用モータ、14…右ライト用モータ。
【技術分野】
【0001】
本発明は、車両用仕様変更装置に関し、詳しくは、自車両が走行する国や地域に対応した設定に自車両の仕様を変更する車両用仕様変更装置に関するものである。
【背景技術】
【0002】
道路を走行する車両の仕様のうち、設定の変更が可能な仕様については、その車両が主として使用される国や地域に対応した仕様に設定される。例えば、左右のヘッドライトの光軸や光量などの仕様は、その車両が使用される国や地域の交通法規に応じた右側通行または左側通行の何れかに対応するように設定される。
【0003】
ところで、車両が使用される国や地域の多くは、他の国や地域に陸続きで隣接しているため、その境界線(国境線)を越えて他の国や地域に車両を乗り入れることも多々ある。この場合、境界線(国境線)の前後で右側通行または左側通行の通行区分が異なるときには、境界線付近で左右のヘッドライトの光軸や光量などの設定を変更する必要も生じる。
【0004】
ここで、この種の車両の仕様変更に関する技術として、例えば特許文献1には、自車両の位置および自車両が存在する地域の地域情報に基づいて自車両の仕様の設定を変更するようにした車両の仕様変更装置が記載されている。また、特許文献2には、自車両の現在位置に基づいてその国に合った仕様データを取得することにより、自車両に搭載された制御機器の仕様を自動的に設定するようにした仕様設定装置が記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開平10−208194号公報
【特許文献2】特開2007−164347号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、特許文献1には、自車両の仕様の設定を国境線等の付近でリアルタイムに変更する手法についての開示がなく、この点で解決すべき課題がある。
【0007】
一方、特許文献2に記載された仕様設定装置では、自車両の仕様の設定を国境線等の付近でリアルタイムに自動的に変更することはできるものの、そのためには自車両をわざわざ停車させる必要があり、自車両を停車させることなく国境線等を越えた場合には、それ以前の仕様が継続されてしまうという不都合がある。
【0008】
そこで、本発明は、自車両の仕様の設定を国境線等の付近で自動的かつ確実に変更することができる車両用仕様変更装置を提供することを課題とする。
【課題を解決するための手段】
【0009】
本発明に係る車両用仕様変更装置は、自車両が走行する地域に対応した設定に自車両の仕様を変更する車両用仕様変更装置であって、自車両の現在位置の情報を取得する手段と、自車両が走行している現走行地域の境界線の位置情報を取得する手段と、自車両が境界線を含む所定の境界ゾーン内にあるか否かを判定する手段と、自車両が境界線を越えて現走行地域から隣接する走行予定地域に進行するか否かを推定する手段とを備え、自車両が現走行地域から隣接する走行予定地域に進行するものと推定される場合には、所定の境界ゾーン内にて自車両の仕様を現走行地域に対応した設定から走行予定地域に対応した設定に変更することを特徴とする。
【0010】
本発明に係る車両用仕様変更装置では、自車両が現走行地域の境界線を含む所定の境界ゾーン内に進入すると、自車両が境界線を越えて現走行地域から隣接する走行予定地域に進行するか否かが推定される。そして、自車両が現走行地域から走行予定地域に進行するものと推定される場合には、所定の境界エリア内にて自車両の仕様が現走行地域に対応した設定から走行予定地域に対応した設定に自動的に変更される。
【0011】
本発明の車両用仕様変更装置において、自車両が走行している現走行地域の境界線は例えば国境線であって、境界線を含む所定の境界ゾーンは、例えば車両の右側通行と左側通行とを変更するために国境線付近に設けられたゾーンとすることができる。
【0012】
そして、この場合に変更される自車両の仕様は、車両の右側通行と左側通行とに対応した仕様、例えば左右のヘッドライトの光軸や光量などの仕様、あるいはレーンキープアシスト制御の仕様とすることができる。
【0013】
本発明の車両用仕様変更装置においては、走行予定地域に対応して設定を変更すべき仕様に関する情報を外部情報源から取得するための通信手段を備えることができる。この場合、設定を変更すべき仕様に関する情報を通信手段により外部情報源から取得できるため、自車両側の記憶装置を低容量化することが可能となる。また、設定を変更すべき仕様に関する情報の更新も容易となる。
【0014】
本発明の車両用仕様変更装置において、例えば左右のヘッドライトの光軸や光量などの仕様の設定が所定の境界ゾーン内にて徐々に変更されると、ドライバに違和感を生じさせないので好ましい。また、例えばレーンキープアシスト制御の仕様の設定を変更する際には、車線変更中の誤動作を防止するため、レーンキープアシスト制御を一時中断するのが好ましい。
【発明の効果】
【0015】
本発明に係る車両用仕様変更装置では、自車両が現走行地域の境界線を含む所定の境界ゾーン内に進入した際、自車両が境界線を越えて現走行地域から隣接する走行予定地域に進行するものと推定されると、自車両の仕様が現走行地域に対応した設定から走行予定地域に対応した設定に自動的に変更される。従って、本発明によれば、自車両の仕様の設定を国境線等の付近で自動的かつ確実に変更することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施形態に係る車両用仕様変更装置の構成を示す機能ブロック図である。
【図2】一実施形態に係る車両用仕様変更装置が実行する処理の手順を示すフローチャートである。
【図3】一実施形態に係る車両用仕様変更装置の作用を示す国境付近の道路の平面図である。
【図4】一実施形態に係る車両用仕様変更装置の変形例の構成を示す機能ブロック図である。
【図5】本発明の他の実施形態に係る車両用仕様変更装置の作用を示す国境付近の道路の平面図である。
【発明を実施するための形態】
【0017】
以下、添付の図面を参照して本発明に係る車両用仕様変更装置を実施するための形態を順次説明する。なお、以下の説明において、同一または同様の構成要素については、同一の符号を付して重複した説明を省略することがある。
【0018】
本発明の一実施形態に係る車両用仕様変更装置は、自車両の仕様のうち設定の変更が可能な仕様、例えば、左右のヘッドライトの光軸の仕様を自車両が走行する地域に対応した設定に自動的に変更する装置である。この車両用仕様変更装置は、例えば図1に示すように、ナビECU(Electronic Control Unit)1、判定ECU(Electronic Control Unit)2およびライトECU(Electronic Control Unit)3を制御ユニットとして備えている。
【0019】
ナビECU1、判定ECU2およびライトECU3は、それぞれ入出力インターフェースI/O、A/Dコンバータ、プログラムおよびデータを記憶したROM(Read Only Memory)、入力データ等を一時記憶するRAM(Random Access Memory)、プログラムを実行するCPU(Central Processing Unit)等をハードウェアとして備えたマイクロコンピュータで構成されている。
【0020】
ナビECU1は、ナビゲーションシステムを構成する制御ユニットであり、自車両の現在位置の情報をGPS(Global Positioning System)受信機4から取得する。また、このナビECU1は、自車両が走行している現走行地域の境界線(国境線)の位置情報と、その境界線(国境線)を含む前後の道路上の所定の境界ゾーンの位置情報とを地図DB(Data Base)5に記憶された国情報などを含む地図情報から取得する。
【0021】
また、ナビECU1は、方位センサー、車速センサーなどを含むセンサー群6から自車両の走行経路の情報を取得する。そして、このナビECU1は、取得した自車両の現在位置の情報と、自車両の現走行地域の境界線(国境線)の位置情報と、所定の境界ゾーンの位置情報と、自車両の走行経路の情報とを判定ECU2に送出する。
【0022】
判定ECU2は、ナビECU1から取得した各情報に基づき、自車両が道路上の境界線(国境線)を含むその前後の所定の境界ゾーン内にあるか否かを判定する。また、判定ECU2は、自車両の走行経路の情報を参照することにより、自車両が境界線(国境線)を越えて現走行地域から隣接する走行予定地域に進行するか否かを推定する。
【0023】
そして、この判定ECU2は、自車両が現走行地域から隣接する走行予定地域に進行するものと推定した場合、例えば左右のヘッドライトの光軸の仕様を切り替えて変更するための所定の変更情報を判定DB(Data Base)7から取得してライトECU3に送出する。
【0024】
ここで、判定DB(Data Base)7には、自車両が走行する可能性のある国または地域に対応した各種の仕様、例えば、左右のヘッドライトの光軸の仕様がその国または地域ごとに記憶されている。また、この光軸の仕様を徐々に切り替えて設定変更するための制御上必要な判定情報や、仕様の切り替え地点までの時間や距離の判定情報が記憶されている。
【0025】
ライトECU3は、仕様設定変更部8を構成する制御ユニットであり、手動式の点灯SW(スイッチ)9からのライト点灯指示信号と、手動式の光軸切替SW(スイッチ)10からの光軸切替指示信号とが入力される。このライトECU3は、点灯SW9からライト点灯指示信号が入力されると、左ヘッドライト11および右ヘッドライト12を所定の光量配分で点灯させる。
【0026】
ここで、左ヘッドライト11および右ヘッドライト12が点灯した状態において、判定ECU2からライトECU3に所定の変更情報が入力されると、ライトECU3は、左ヘッドライト11および右ヘッドライト12の光軸を調整するための左ライト用モータ13および右ライト用モータ14にそれぞれ所定の駆動信号を出力することで、左ヘッドライト11および右ヘッドライト12の光軸の仕様を相互に切り替えて変更する。
【0027】
また、ライトECU3は、左ヘッドライト11および右ヘッドライト12が点灯していない状態においても、光軸切替SW10から光軸切替指示信号が入力されると、左ライト用モータ13および右ライト用モータ14にそれぞれ所定の駆動信号を出力して左ヘッドライト11および右ヘッドライト12の光軸の仕様を相互に切り替える。
【0028】
次に、一実施形態の車両用仕様変更装置が実行する処理の手順を図2に示すフローチャートに沿って順次説明する。この車両用仕様変更装置は、図3に示すように、自車両Cが現走行地域から隣接する走行予定地域に国境線Bを越えて進行する際、左右のヘッドライトの光軸の仕様を右側通行の設定から左側通行の設定に切り替えるように一連の処理を実行する。
【0029】
図2のフローチャートにおいて、ステップS1では、ナビECU1がGPS情報を取得する。すなわち、ナビECU1がGPS受信機4から自車両Cの現在位置の情報を取得する。
【0030】
ステップS2では、ナビECU1が地図情報を取得する。すなわち、ナビECU1が地図DB5に記憶された国情報などを含む地図情報からから自車両Cが走行している現走行地域の国境線Bの位置情報と、その国境線Bを含む前後の道路上の所定の境界ゾーンZの位置情報とを取得する。
【0031】
ステップS3では、ナビECU1がセンサ情報を取得する。すなわち、ナビECU1が方位センサー、車速センサーなどを含むセンサー群6から自車両の走行経路の情報を取得する。
【0032】
ステップS4において、判定ECU2は、ナビECU1から取得した自車両Cの現在位置の情報と、自車両Cが走行している現走行地域の国境線Bの位置情報と、国境線Bを含む所定の境界ゾーンZの位置情報とに基づき、自車両Cが道路上の国境線Bを含む所定の境界ゾーンZ内、すなわち、右側通行と左側通行とを変更するために設けられた境界ゾーンZ内にあるか否かを判定する。
【0033】
ステップS4の判定結果がNOであればリターンに進むが、判定結果がYESであれば、次のステップS5において、判定ECU2は、ナビECU1から取得した自車両Cの走行経路の情報に基づき、自車両Cが国境線Bを越えて現走行地域から隣接する走行予定地域に進行するか否かを推定する。
【0034】
ステップS5の判定結果がNOであればリターンに進むが、判定結果がYESであれば、仕様設定変更部8による光軸切替制御が実施される。まず、自車両Cの左右のヘッドライトの光軸の仕様を切り替えるための所定の変更情報を判定ECU2が判定DB7から取得してライトECU3に送出する。
【0035】
このとき、点灯SW9からライトECU3にライト点灯指示信号が入力されていると、ライトECU3は、左ライト用モータ13および右ライト用モータ14にそれぞれ所定の駆動信号を出力することで、図3に示すように、自車両Cの左ヘッドライト11および右ヘッドライト12の光軸の仕様を右側通行の設定から左側通行の設定に切り替える。
【0036】
ここで、このような光軸切替制御は、自車両Cのドライバに違和感を生じさせないように、手動式の点灯SW(スイッチ)9がオンされた状態において、右側通行と左側通行とを変更するために国境線B付近に設けられた境界ゾーンZ内で徐々に行われる。
【0037】
以上説明したように、一実施形態に係る車両用仕様変更装置では、図3に示すように、自車両Cが現走行地域の国境線Bを含むその前後の境界ゾーンZ内に進入すると、自車両Cが国境線Bを越えて現走行地域から隣接する走行予定地域に進行するか否かが推定される。そして、自車両Cが現走行地域から走行予定地域に進行するものと推定される場合には、境界ゾーンZ内において、自車両Cの左右のヘッドライトの光軸の仕様が現走行地域に対応した右側通行の設定から走行予定地域に対応した左側通行の設定に自動的に変更される。
【0038】
従って、一実施形態の車両用仕様変更装置によれば、自車両Cの左ヘッドライト11および右ヘッドライト12の光軸の仕様の設定を国境線Bの付近で自動的かつ確実に変更することができる。
【0039】
本発明に係る車両用仕様変更装置は、前述した一実施形態に限定されるものではない。例えば、図1に示した判定DB7は、図4に示すように、外部のセンターに外部情報源として設置される主判定DB7Aと、自車両C側に搭載される副判定DB7Bとに分割して構成してもよい。この場合、判定ECU2は、自車両C側の副判定DB7Bとの間で直接情報交換し、センター側の主判定DB7Aとの間では、路車間通信システム用などの適宜の通信装置15A,15Bを介して情報交換する。
【0040】
図4に示した構成の車両用仕様変更装置においては、自車両Cの設定を変更すべき仕様に関する情報などの大容量の情報をセンター側の主判定DB7Aに記憶させることができ、その分、自車両C側の副判定DB7Bを低容量化することができる。また、設定を変更すべき仕様に関する情報の更新もセンター側の主判定DB7Aにて容易に行うことができる。
【0041】
また、本発明に係る車両用仕様変更装置は、図5に示すように、自車両Cが現走行地域から隣接する走行予定地域に国境線Bを越えて進行する際、自車両Cの後部に装備したバックガイドカメラの画像認識に基づくレーンキープアシスト(LKA)制御の仕様を例えば右側通行の設定から左側通行の設定に切り替えるように構成することができる。
【0042】
すなわち、バックガイドカメラにより右側の実線のサイドラインと中央の点線のセンターラインとを画像認識する右側通行用のレーンキープアシスト(LKA)制御の仕様を左側の実線のサイドラインと中央の点線のセンターラインとを画像認識する左側通行用のレーンキープアシスト(LKA)制御の仕様に切り替えるように構成してもよい。この場合、自車両Cが右車線から左車線に車線変更する間の制御の誤動作を防止するため、レーンキープアシスト(LKA)制御は一時中断するのが好ましい。
【符号の説明】
【0043】
1…ナビECU、2…判定ECU、3…ライトECU、4…GPS受信機、5…地図DB、6…センサー群、7…判定DB、8…仕様設定変更部、9…点灯SW、10…光軸切替SW、11…左ヘッドライト、12…右ヘッドライト、13…左ライト用モータ、14…右ライト用モータ。
【特許請求の範囲】
【請求項1】
自車両が走行する地域に対応した設定に自車両の仕様を変更する車両用仕様変更装置であって、
自車両の現在位置の情報を取得する手段と、自車両が走行している現走行地域の境界線の位置情報を取得する手段と、自車両が前記境界線を含む所定の境界ゾーン内にあるか否かを判定する手段と、自車両が前記境界線を越えて現走行地域から隣接する走行予定地域に進行するか否かを推定する手段とを備え、
自車両が現走行地域から隣接する走行予定地域に進行すると推定される場合には、前記所定の境界ゾーン内にて自車両の仕様を現走行地域に対応した設定から走行予定地域に対応した設定に変更することを特徴とする車両用仕様変更装置。
【請求項2】
前記境界線が国境線であって、前記境界ゾーンが車両の右側通行と左側通行とを変更するためのゾーンであることを特徴とする請求項1に記載の車両用仕様変更装置。
【請求項3】
前記仕様が車両の右側通行と左側通行とに対応した仕様であることを特徴とする請求項1または2に記載の車両用仕様変更装置。
【請求項4】
前記走行予定地域に対応して設定を変更すべき仕様に関する情報を外部情報源から取得するための通信手段を備えていることを特徴とする請求項1〜3の何れか1の請求項に記載の車両用仕様変更装置。
【請求項5】
前記境界ゾーン内にて自車両の仕様の設定を徐々に変更することを特徴とする請求項1〜4の何れか1の請求項に記載の車両用仕様変更装置。
【請求項6】
前記境界ゾーン内にて自車両の仕様の設定を変更する際、変更中の仕様に基づく制御を一時中断することを特徴とする請求項1〜4の何れか1の請求項に記載の車両用仕様変更装置。
【請求項1】
自車両が走行する地域に対応した設定に自車両の仕様を変更する車両用仕様変更装置であって、
自車両の現在位置の情報を取得する手段と、自車両が走行している現走行地域の境界線の位置情報を取得する手段と、自車両が前記境界線を含む所定の境界ゾーン内にあるか否かを判定する手段と、自車両が前記境界線を越えて現走行地域から隣接する走行予定地域に進行するか否かを推定する手段とを備え、
自車両が現走行地域から隣接する走行予定地域に進行すると推定される場合には、前記所定の境界ゾーン内にて自車両の仕様を現走行地域に対応した設定から走行予定地域に対応した設定に変更することを特徴とする車両用仕様変更装置。
【請求項2】
前記境界線が国境線であって、前記境界ゾーンが車両の右側通行と左側通行とを変更するためのゾーンであることを特徴とする請求項1に記載の車両用仕様変更装置。
【請求項3】
前記仕様が車両の右側通行と左側通行とに対応した仕様であることを特徴とする請求項1または2に記載の車両用仕様変更装置。
【請求項4】
前記走行予定地域に対応して設定を変更すべき仕様に関する情報を外部情報源から取得するための通信手段を備えていることを特徴とする請求項1〜3の何れか1の請求項に記載の車両用仕様変更装置。
【請求項5】
前記境界ゾーン内にて自車両の仕様の設定を徐々に変更することを特徴とする請求項1〜4の何れか1の請求項に記載の車両用仕様変更装置。
【請求項6】
前記境界ゾーン内にて自車両の仕様の設定を変更する際、変更中の仕様に基づく制御を一時中断することを特徴とする請求項1〜4の何れか1の請求項に記載の車両用仕様変更装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2010−190673(P2010−190673A)
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願番号】特願2009−34283(P2009−34283)
【出願日】平成21年2月17日(2009.2.17)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願日】平成21年2月17日(2009.2.17)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]