
車両用停止線検出システム
【課題】 道路上の停止線を正確に検出する。
【解決手段】 車載機において、車両の停車状態が検出されたときに、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、情報センターにおいて、複数の車載機から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信する。
【解決手段】 車載機において、車両の停車状態が検出されたときに、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、情報センターにおいて、複数の車載機から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、道路上の停止線を検出するシステム、車載停止線検出装置、情報センターおよび車両用停止線検出方法に関する。
【背景技術】
【0002】
車載カメラで撮像した道路面の画像を処理して停止線を検出する装置が知られている(例えば、特許文献1参照)。
【0003】
この出願の発明に関連する先行技術文献としては次のものがある。
【特許文献1】特開2004−295597号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した停止線検出装置では、停止線(白線)の塗装の経年劣化や天候などによる路面状況によって、路面の画像から停止線を正確に検出できないことがある。
【課題を解決するための手段】
【0005】
(1) 車載機において、車両の停車状態が検出されたときに、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、情報センターにおいて、複数の車載機から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信する。
(2) 車載機において、車両の停車状態が検出されたときに路面に描かれた停止線で停車しているか否かを判定し、停止線で停車していると判定された場合に、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、情報センターにおいて、複数の車載機から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信する。
【発明の効果】
【0006】
本発明によれば、停止線の塗装の経年劣化や天候などによる路面状況に影響されず、停止線を正確に検出することができる。
【発明を実施するための最良の形態】
【0007】
情報センターにおいて、車載停止線検出装置を備えた多くの車両(プローブ車両)から停止線情報を収集して統計処理し、正確な停止線位置を推定して各車両に配信するようにした発明の一実施の形態を説明する。なお、以下では車載停止線検出装置をナビゲーション装置に組み込んだ一実施の形態を説明するが、ナビゲーション装置とは別個に車載停止線検出装置を構成してもよい。また、この明細書において停止線とは交差点や踏切などの手前の道路面に塗装された一旦停車を指示する白線をいう。
【0008】
《発明の第1の実施の形態》
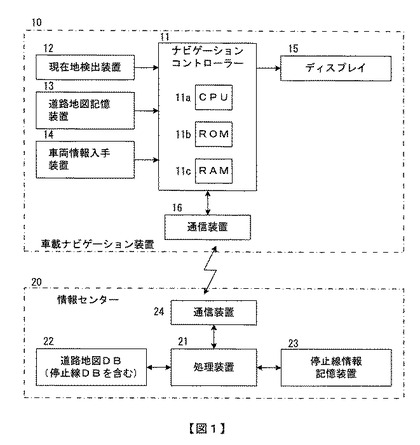
図1は第1の実施の形態の構成を示す図である。車載ナビゲーション装置10は目的地までの最適経路を探索し、車両周辺の道路地図を表示するとともに道路地図上に最適経路と現在地を表示し、乗員を目的地まで誘導する。車載ナビゲーション装置10は情報センター20と通信を行い、道路交通情報の授受を行う。つまり、車載ナビゲーション装置10を搭載した複数の車両がプローブ車両として機能し、道路交通情報を検出して情報センター20へ送り、情報センター20で複数の車両から送られた道路交通情報を集約、あるいは統計処理してふたたび各車両へ配信する。
【0009】
車載ナビゲーション装置10と情報センター20との間で授受される道路交通情報には停止線情報が含まれる。つまり、車載ナビゲーション装置10で道路上の停止線を検出し、停止線情報を情報センター20へ送る。情報センター20では多くの車両から収集した停止線情報を統計処理し、正確な停止線位置を推定してふたたび各車両へ配信する。
【0010】
車載ナビゲーション装置10はナビゲーションコントローラー11、現在地検出装置12、道路地図記憶装置13、車両情報入手装置14、ディスプレイ15、通信装置16などを備えている。ナビゲーションコントローラー11はCPU11a、ROM11b、RAM11cなどを備え、上述したナビゲーション機能の他に、停止線検出機能を備えている。
【0011】
現在地検出装置12はGPS受信機(不図示)、走行距離センサー(不図示)および進行方位センサー(不図示)を備え、衛星航法と自律航法により車両の現在地を検出する。自律航法による現在地検出では、走行距離センサーで検出される走行距離と進行方位センサーで検出される進行方位とに基づいて車両の走行軌跡を検出し、道路地図記憶装置13に記憶されている道路地図とマップマッチングを行って走行道路を特定し、車両の現在地を検出する。なお、車速センサー(不図示)から所定距離ごとに出力される車速パルスを計数して車両の走行距離を検出してもよい。また、道路地図記憶装置13の道路地図データには停止線位置のデータが含まれている。
【0012】
車両情報入手装置14は各種センサーや各種コントローラーから車両の各種情報を入手する。この車両情報には、車速センサーにより検出される車速、車間距離検出装置により検出される先行車の有無と車間距離、変速機コントローラーにより検出される変速機シフト位置、パーキングブレーキスイッチ、イグニッションキースイッチ、ハザードスイッチ、ターンシグナルスイッチなどのオン、オフ情報などが含まれる。ディスプレイ15は道路地図や各種情報を表示し、通信装置16は情報センター20と無線通信を行う。なお、通信装置16には携帯電話機、車載電話機あるいは専用の無線通信機などを用いることができる。
【0013】
情報センター20は処理装置21、道路地図データベース22、停止線情報記憶装置23、通信装置24などを備えている。処理装置21は大型コンピューターであり、道路交通情報の各種処理を行う。この処理には、車載ナビゲーション装置10から収集した停止線情報を統計処理し、正確な停止線位置を推定する処理が含まれる。道路地図データベース22は道路地図データを記憶する記憶装置であり、道路地図データには停止線位置データが含まれる。
【0014】
停止線情報記憶装置23は車載ナビゲーション装置10から収集した停止線情報を一時的に記憶するための記憶装置である。通信装置24は車載ナビゲーション装置10と無線通信を行う。なお、車載ナビゲーション装置10の道路地図記憶装置13に記憶されている道路地図と、情報センター20の道路地図データベース22に記憶されている道路地図とは同一のものである。
【0015】
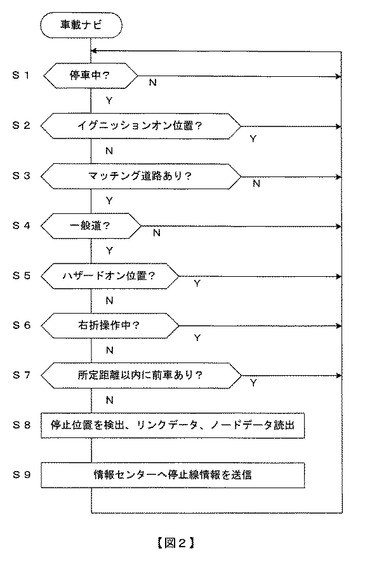
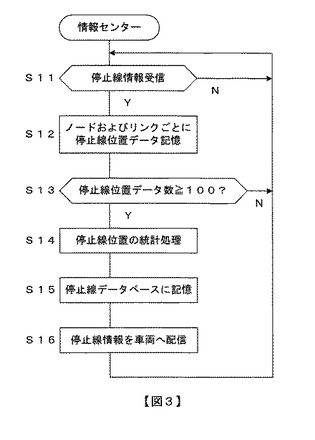
図2は車載ナビゲーション装置の停止線検出処理を示すフローチャート、図3は情報センターの停止線推定処理を示すフローチャートである。これらのフローチャートにより、第1の実施の形態の動作を説明する。
【0016】
車載ナビゲーション装置10のナビゲーションコントローラー11は、イグニッションキースイッチ(不図示)がオンすると図2に示す停止線検出プログラムを繰り返し実行する。ステップ1において車両情報入手装置14から車速を入手し、車速が予め設定した停車判定基準値以下か、つまり車両が停車しているか否かを判定する。停車していなければステップ1へ戻り、停車している場合はステップ2へ進む。
【0017】
ステップ2では車両の現在地がイグニッションオン位置と異なるか否かを判定する。車両情報入手装置14からイグニッションキーによるイグニッションオン情報を入手し、イグニッションオン時に現在地検出装置12で検出した車両位置をイグニッションオン位置としてRAM11cに記憶しておく。そして、現在地検出装置12で検出される車両の現在地とRAM11cに記憶されている最新のイグニッションオン位置とを比較し、両者が一致する場合は、車両が例えば駐車場でエンジンを始動したが、そこから動いていないと考えられる。つまり、道路上の停止線で一旦停車しているのではないから、この場合はステップ1へ戻り上述した処理を繰り返す。
【0018】
車両の現在地が最新のイグニッションオン位置と異なる場合は、車両が道路上の停止線で一旦停車している可能性があり、ステップ3へ進む。ステップ3では現在地検出装置12の自律航法においてマッチング道路が存在するか否かを確認する。自律航法においてマッチング道路が存在しない場合は車両が道路以外の駐車場などで停車している可能性が高く、道路上の停止線で一旦停車しているのではないと考えられるから、この場合はステップ1へ戻って上述した処理を繰り返す。
【0019】
現在地検出装置12の自律航法においてマッチング道路が存在する場合にはステップ4へ進み、そのマッチング道路が一般道であるか否かを判定する。マッチング道路が有料道路や高速道路の場合は料金所やサービスエリアなどで停車している可能性が高く、道路上の停止線で一旦停車しているのではないと考えられるから、この場合はステップ1へ戻って上述した処理を繰り返す。
【0020】
マッチング道路が一般道の場合はステップ5へ進み、車両の現在地がハザードオン位置と異なるか否かを判定する。車両情報入手装置14からハザードスイッチのオン情報を入手し、ハザードスイッチオン時に現在地検出装置12で検出した車両位置をハザードオン位置としてRAM11cに記憶しておく。そして、現在地検出装置12で検出される車両の現在地とRAM11cに記憶されている最新のハザードオン位置とを比較する。両者が一致する場合は、車両が路肩に停車している可能性が高く、道路上の停止線で一旦停車していないと考えられるから、この場合はステップ1へ戻って上述した処理を繰り返す。
【0021】
車両の現在地がハザードオン位置と異なる場合はステップ6へ進み、車両情報入手装置14からターンシグナルスイッチの操作情報を入手し、ターンシグナルスイッチが右折側に操作されているか否かを判定する。右折操作中の場合は、交差点に進入して右折待ちの停車をしている可能性が高く、道路上の停止線で一旦停車していないと考えられるから、この場合はステップ1へ戻って上述した処理を繰り返す。
【0022】
右折操作中でない場合はステップ7へ進み、車両情報入手装置14から車間距離検出装置による先行車の検出情報を入手し、所定距離、例えば5m以内に先行車が検出されているか否かを判定する。なお、車間距離検出装置の代わりに、カメラによる車両前方の撮像画像を処理して先行車を検出してもよい。自車のすぐ前に先行車が検出される場合は、道路上の停止線で停車している先行車の後方で停車している可能性が高く、自車が停止線で停車しているのではないと考えられる。この場合は自車の停止位置が停止線位置からずれているので、自車の停止位置を停止線位置とすると停止線位置検出精度が低下してしまう。したがって、この場合はステップ1へ戻って上述した処理を繰り返す。
【0023】
以上のステップ2〜7のすべての条件を満たした場合には、自車が道路上の停止線で一旦停車していると考えられ、ステップ8で現在地検出装置12により車両の停止位置を検出するとともに、道路地図記憶装置13の道路地図データから停止位置のリンクデータと車両進行方向直近のノードデータを読み出す。そして、ステップ9で停止位置の緯度経度データ、リンクデータおよびノードデータを停止線情報として通信装置24により情報センター20へ送信する。
【0024】
なお、ステップ2〜7の停止線停車判定条件のうち、少なくとも1つの判定条件が成立していれば車両が停止線で停車していると判定してもよい。もちろん、ステップ2〜7の判定条件のうち、成立している条件の数が多いほど判定精度が高くなる。また、車載ナビゲーション装置10のナビゲーションコントローラー11の負荷が大きいときは、図2のステップ2〜7の条件の一部を省略したり、条件の判定順序を変更してもよい。
【0025】
情報センター20の処理装置21は図3に示す停止線推定プログラムを繰り返し実行する。ステップ11において車載ナビゲーション装置10から停止線情報を受信したか否かを確認し、停止線情報を受信したらステップ12へ進む。停止線情報には停止位置の緯度経度データ、リンクデータおよび車両進行方向直近のノードデータが含まれる。ステップ12ではノードおよびリンクごとに停止位置データを整理し、停止線情報記憶装置23に記憶する。
【0026】
なお、停止線情報記憶装置23に記憶された停止線情報の内、入手してから所定の期間が経過した情報を消去するようにしてもよい。これにより、最新の停止線情報に基づいてより正確な停止線位置を推定することができる。
【0027】
ステップ13においてノードおよびリンクごとの停止線情報が所定数、例えば100以上蓄積されたか否かを確認し、所定数以上蓄積された場合はステップ14へ進む。各車両から収集されたノードおよびリンクごとの停止線情報が所定数以上蓄積された場合は、ステップ14で所定数以上、蓄積された停止線情報を統計処理する。具体的には停止位置を平均化し、停止線位置を推定する。なお、停止線情報の統計処理を開始する上記所定数には任意の値を設定できるが、所定数を多くするほど停止線位置の推定精度が高くなる。
【0028】
ステップ15において統計処理により推定した停止線位置を道路地図データベース22に停止線データとして記憶する。道路地図データベース22にすでに同一のノードおよびリンクに対する停止線位置が記憶されている場合には、最新の推定位置に更新する。続くステップ16では統計処理により推定した停止線位置と、その停止線位置のノードデータおよびリンクデータを停止線情報として通信装置16により各車両へ配信する。
【0029】
各車両の車載ナビゲーション装置10は、情報センター20から配信された停止線情報を受信し、道路地図記憶装置13に記憶する。道路地図記憶装置13にすでに同一のノードおよびリンクに対する停止線位置が記憶されている場合には、受信した最新の停止線位置に更新する。
【0030】
各車両のナビゲーション装置10は、情報センター20から入手した正確な停止線情報を用いて、停止線直前での警告表示や音声案内などを行ったり、停止線手前で自動的に減速し、停止線で自動的に停車する制御を行い、運転者の運転操作を支援して運転負荷を軽減する。
【0031】
このように、第1の実施の形態によれば、車載ナビゲーション装置において、車両の停車状態が検出されたときに路面に描かれた停止線で停車しているか否かを判定し、停止線で停車していると判定された場合に、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、情報センターにおいて、複数の車載ナビゲーション装置から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信するようにしたので、停止線の塗装の経年劣化や天候などによる路面状況に影響されず、停止線を正確に検出することができる。また、道路工事などにより停止線位置が変わったり、新しく停止線が設置された場合でも、常に最新の停止線位置の情報を提供することができる。
【0032】
また、第1の実施の形態によれば、(1)車両の現在位置がイグニッションオン時の位置と異なるという判定条件、(2)現在地検出装置のマップマッチングにおいてマッチング道路が存在するという判定条件、(3)現在地検出装置のマップマッチングにおいてマッチング道路が存在し、かつそのマッチング道路が一般道であるという判定条件、(4)車両の現在位置がハザードスイッチオン時の位置と異なるという判定条件、(5)ターンシグナルスイッチが右折側に操作されていないという判定条件、(6)車両前方の先行車の有無と車間距離を検出する装置により所定距離以内に先行車が検出されないという判定条件の内のいずれか1または複数の判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定し、情報センターへ停止線情報を送るようにしたので、停止線で停車している場合の停止線情報のみが情報センターへ送られ、そのような停止線情報を用いて停止線推定精度を向上させることができる。
【0033】
《発明の第2の実施の形態》
上述した第1の実施の形態では、車両の状態や走行状況が種々の停車線停止判定条件を満たす場合に、交差点や踏切などの手前の停止線で一旦停車していると判定する例を示したが、これらの判定条件を用いず、自車が停車している場合にはその停車位置を情報センターへ送信し、情報センターで収集した多くのプローブ車両の停車位置の分布から停止線位置を推定する第2の実施の形態を説明する。なお、この第2の実施の形態の構成は図1に示す構成と同様であり、図示と説明を省略する。
【0034】
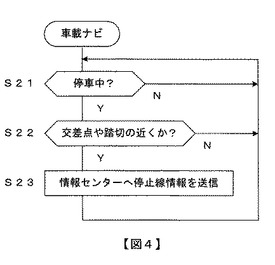
図4は車載ナビゲーション装置の停止線検出処理を示すフローチャートである。車載ナビゲーション装置10のナビゲーションコントローラー11は、イグニッションキースイッチ(不図示)がオンすると図4に示す停止線検出プログラムを繰り返し実行する。ステップ21において車両情報入手装置14から車速を入手し、車速が予め設定した停車判定基準値以下か、つまり車両が停車しているか否かを判定する。停車していなければステップ21へ戻り、停車している場合はステップ22へ進む。
【0035】
ステップ22では道路地図記憶装置13の道路地図データを参照して車両が今、交差点や踏切などの一旦停車しなければならない場所の近くにいるか否かを判定する。この判定は、道路地図データから進行方向直近の交差点や踏切などの一旦停車しなければならないノード情報を読み出し、車両の現在地から交差点や踏切などのノードまでの距離が例えば30m以内であれば、車両が一旦停車しなければならない場所の近くにいると判定する。車両の現在地がこれらの一旦停車しなければならない場所の近くにいない場合は、道路上の停止線で停車しているのではないと考えられるから、ステップ21へ戻って上述した処理を繰り返す。
【0036】
車両が交差点や踏切などの一旦停車しなければならない場所の近くで停車している場合にはステップ23へ進み、道路地図記憶装置13の道路地図データを参照して、車両の現在位置、すなわち停止線位置と考えられる地点の緯度経度データ、道路リンクデータおよび進行方向直近のノードデータを読み出し、それららを停止線情報として通信装置24により情報センター20へ送信する。
【0037】
次に、情報センター20の停止線推定処理を説明する。情報センター20のおける停止線推定処理は、統計処理方法以外は図3に示す第1の実施の形態の停止線推定処理と同様であり、相違点を中心に説明する。図3のステップ14において多くの車両から収集した同一リンクおよびノードの停止線情報を統計処理し、停止線位置を推定する。
【0038】
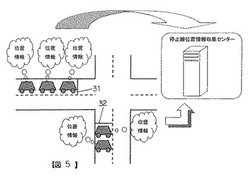
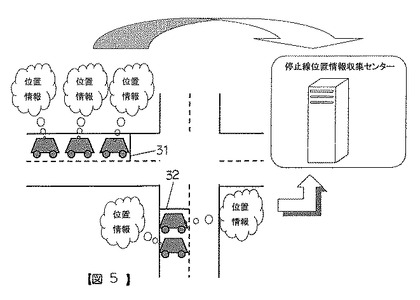
図5は多くのプローブ車両から収集したある交差点の停止線情報のイメージを示す。実際の停止線31,32の直前で一旦停車している車両はそれぞれ1台であり、その他の車両は停止線31,32で停車している前車の後方で停車している。いずれの車両も交差点の近くで停車しており、それぞれの停車位置を停車線情報として情報センター20へ送信する。
【0039】
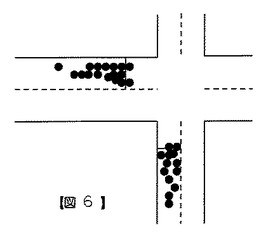
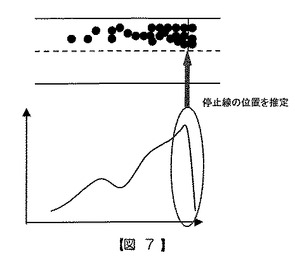
情報センター20では、多くのプローブ車両から収集した停止線情報をリンクおよびノードごとに分類し、情報数が所定数(この実施の形態では100)を超えたリンクおよびノードの停止位置の車両進行方向に対する度数分布を求める。図6に停止位置の度数分布の一例を示す。車両が多く停車する付近は度数が高く、車両が停車する機会が少ない付近は度数が低くなる。本来、停止線の近傍では車両が一旦停止する機会は多いから停止位置の近傍の度数が高く、停止線より後方に行くにつれて車両が停止する機会が減ってくるため、停止位置の度数が徐々に低くなる。一方、停止線から進行方向前方は交差点内や踏切内に入るため、交差点内や踏切内で車両が停車する機会は非常に少ないと考えられ、停止位置の度数は極端に低くなっている。
【0040】
そこで、この第2の実施の形態では、図7に示すように、停止位置の度数分布において停止位置の度数が最も高い位置で、かつその位置の車両進行方向前方で停止位置の度数が極端に低くなっている位置を停止線位置と推定する。
【0041】
このように、第2の実施の形態によれば、車載ナビゲーション装置において、車両の停車状態が検出されたときに、車両の現在地が一旦停車しなければならない場所またはその近くであるか否かを判定し、一旦停車しなければならない場所またはその近くである場合に、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、情報センターにおいて、複数の車載ナビゲーション装置から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信するようにしたので、停止線の塗装の経年劣化や天候などによる路面状況に影響されず、停止線を正確に検出することができる。また、道路工事などにより停止線位置が変わったり、新しく停止線が設置された場合でも、常に最新の停止線位置の情報を提供することができる。
【0042】
《発明の第3の実施の形態》
上述した第2の実施の形態では、車両が停車しているときに、交差点や踏切などの一旦停車しなければならない場所の近くにいるか否かを判定し、一旦停車しなければならない場所の近くにいる場合に、停車位置の緯度経度データ、リンクデータおよび車両進行方向直近のノードのデータを情報センターへ送るようにしたが、この第3の実施の形態では、車両の停車時に交差点や踏切などの一旦停車しなければならない場所の近くにいるか否かを判定する処理を省略する。つまり、車両が停車しているときは、その停車位置の緯度経度データ、リンクデータおよび車両進行方向直近のノードのデータを情報センターへ送り、情報センターにおいて、第2の実施の形態に示したように、リンクおよびノードごとに停止位置を分類し、リンクおよびノードごとの停止位置データの蓄積量が所定数、例えば200を超えたら、そのリンクおよびノードの停止位置を統計処理する。すなわち、停止位置の度数分布を作成し、停止位置の度数が最も高い位置で、かつその位置の車両進行方向前方で停止位置の度数が極端に低くなっている位置を停止線位置と推定する。
【0043】
この第3の実施の形態では、交差点や踏切などの一旦停車しなければならない場所で停車したときの停止位置データに加え、駐車場や道路の路肩などの一旦停車しなくてもよい場所で停車したときの停止位置データも情報センターへ送られ、情報センターの負担が多くなるが、車載機における判定処理、すなわち、車両の停車時に交差点や踏切などの一旦停車しなければならない場所の近くにいるか否かを判定する処理が省略でき、車載機の負担が軽減される。情報センターには処理能力の高い大型コンピューターが設置されるから、情報センター側の負担増は問題にならない。
【0044】
ただし、この第3の実施の形態では、統計処理を行う条件である、リンクおよびノードごとの停止位置データの蓄積量を第2の実施の形態よりも多くし、駐車場や道路の路肩に停車した場合の停止位置データに対する統計処理を行わないようにし、車載機による上記判定処理を省略したことによる停止線位置の推定精度の低下を防ぐようにするのが望ましい。
【0045】
このように第3の実施の形態によれば、車載ナビゲーション装置において、車両の停車状態が検出されたときに、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、情報センターにおいて、複数の車載ナビゲーション装置から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信するようにしたので、停止線の塗装の経年劣化や天候などによる路面状況に影響されず、停止線を正確に検出することができる。また、道路工事などにより停止線位置が変わったり、新しく停止線が設置された場合でも、常に最新の停止線位置の情報を提供することができる。
【0046】
特許請求の範囲の構成要素と一実施の形態の構成要素との対応関係は次の通りである。すなわち、道路地図記憶装置13が地図記憶手段を、現在地検出装置12が位置検出手段を、車両情報入手装置14およびナビゲーションコントローラー11が停車検出手段および停車判定手段を、通信装置16およびナビゲーションコントローラー11が情報送信手段を、処理装置21が位置推定手段を、通信装置24および処理装置21が情報配信手段をそれぞれ構成する。なお、以上の説明はあくまで一例であり、発明を解釈する際、上記の実施の形態の記載事項と特許請求の範囲の記載事項との対応関係になんら限定も拘束もされない。
【図面の簡単な説明】
【0047】
【図1】第1の実施の形態の構成を示す図である。
【図2】第1の実施の形態の車載ナビゲーション装置の停止線検出処理を示すフローチャートである。
【図3】第1の実施の形態の情報センターの停止線推定処理を示すフローチャートである。
【図4】第2の実施の形態の車載ナビゲーション装置の停止線検出処理を示すフローチャートである。
【図5】複数の車両から収集したある交差点付近の停止位置情報を示す図である。
【図6】ある交差点付近の停止位置分布を示す図である。
【図7】停止線位置の推定方法を示す図である。
【符号の説明】
【0048】
10 車載ナビゲーション装置
11 ナビゲーションコントローラー
12 現在地検出装置
13 道路地図記憶装置
14 車両情報入手装置
16 通信装置
20 情報センター
21 処理装置
22 道路地図データベース
23 停止線情報記憶装置
24 通信装置
【技術分野】
【0001】
本発明は、道路上の停止線を検出するシステム、車載停止線検出装置、情報センターおよび車両用停止線検出方法に関する。
【背景技術】
【0002】
車載カメラで撮像した道路面の画像を処理して停止線を検出する装置が知られている(例えば、特許文献1参照)。
【0003】
この出願の発明に関連する先行技術文献としては次のものがある。
【特許文献1】特開2004−295597号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した停止線検出装置では、停止線(白線)の塗装の経年劣化や天候などによる路面状況によって、路面の画像から停止線を正確に検出できないことがある。
【課題を解決するための手段】
【0005】
(1) 車載機において、車両の停車状態が検出されたときに、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、情報センターにおいて、複数の車載機から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信する。
(2) 車載機において、車両の停車状態が検出されたときに路面に描かれた停止線で停車しているか否かを判定し、停止線で停車していると判定された場合に、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、情報センターにおいて、複数の車載機から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信する。
【発明の効果】
【0006】
本発明によれば、停止線の塗装の経年劣化や天候などによる路面状況に影響されず、停止線を正確に検出することができる。
【発明を実施するための最良の形態】
【0007】
情報センターにおいて、車載停止線検出装置を備えた多くの車両(プローブ車両)から停止線情報を収集して統計処理し、正確な停止線位置を推定して各車両に配信するようにした発明の一実施の形態を説明する。なお、以下では車載停止線検出装置をナビゲーション装置に組み込んだ一実施の形態を説明するが、ナビゲーション装置とは別個に車載停止線検出装置を構成してもよい。また、この明細書において停止線とは交差点や踏切などの手前の道路面に塗装された一旦停車を指示する白線をいう。
【0008】
《発明の第1の実施の形態》
図1は第1の実施の形態の構成を示す図である。車載ナビゲーション装置10は目的地までの最適経路を探索し、車両周辺の道路地図を表示するとともに道路地図上に最適経路と現在地を表示し、乗員を目的地まで誘導する。車載ナビゲーション装置10は情報センター20と通信を行い、道路交通情報の授受を行う。つまり、車載ナビゲーション装置10を搭載した複数の車両がプローブ車両として機能し、道路交通情報を検出して情報センター20へ送り、情報センター20で複数の車両から送られた道路交通情報を集約、あるいは統計処理してふたたび各車両へ配信する。
【0009】
車載ナビゲーション装置10と情報センター20との間で授受される道路交通情報には停止線情報が含まれる。つまり、車載ナビゲーション装置10で道路上の停止線を検出し、停止線情報を情報センター20へ送る。情報センター20では多くの車両から収集した停止線情報を統計処理し、正確な停止線位置を推定してふたたび各車両へ配信する。
【0010】
車載ナビゲーション装置10はナビゲーションコントローラー11、現在地検出装置12、道路地図記憶装置13、車両情報入手装置14、ディスプレイ15、通信装置16などを備えている。ナビゲーションコントローラー11はCPU11a、ROM11b、RAM11cなどを備え、上述したナビゲーション機能の他に、停止線検出機能を備えている。
【0011】
現在地検出装置12はGPS受信機(不図示)、走行距離センサー(不図示)および進行方位センサー(不図示)を備え、衛星航法と自律航法により車両の現在地を検出する。自律航法による現在地検出では、走行距離センサーで検出される走行距離と進行方位センサーで検出される進行方位とに基づいて車両の走行軌跡を検出し、道路地図記憶装置13に記憶されている道路地図とマップマッチングを行って走行道路を特定し、車両の現在地を検出する。なお、車速センサー(不図示)から所定距離ごとに出力される車速パルスを計数して車両の走行距離を検出してもよい。また、道路地図記憶装置13の道路地図データには停止線位置のデータが含まれている。
【0012】
車両情報入手装置14は各種センサーや各種コントローラーから車両の各種情報を入手する。この車両情報には、車速センサーにより検出される車速、車間距離検出装置により検出される先行車の有無と車間距離、変速機コントローラーにより検出される変速機シフト位置、パーキングブレーキスイッチ、イグニッションキースイッチ、ハザードスイッチ、ターンシグナルスイッチなどのオン、オフ情報などが含まれる。ディスプレイ15は道路地図や各種情報を表示し、通信装置16は情報センター20と無線通信を行う。なお、通信装置16には携帯電話機、車載電話機あるいは専用の無線通信機などを用いることができる。
【0013】
情報センター20は処理装置21、道路地図データベース22、停止線情報記憶装置23、通信装置24などを備えている。処理装置21は大型コンピューターであり、道路交通情報の各種処理を行う。この処理には、車載ナビゲーション装置10から収集した停止線情報を統計処理し、正確な停止線位置を推定する処理が含まれる。道路地図データベース22は道路地図データを記憶する記憶装置であり、道路地図データには停止線位置データが含まれる。
【0014】
停止線情報記憶装置23は車載ナビゲーション装置10から収集した停止線情報を一時的に記憶するための記憶装置である。通信装置24は車載ナビゲーション装置10と無線通信を行う。なお、車載ナビゲーション装置10の道路地図記憶装置13に記憶されている道路地図と、情報センター20の道路地図データベース22に記憶されている道路地図とは同一のものである。
【0015】
図2は車載ナビゲーション装置の停止線検出処理を示すフローチャート、図3は情報センターの停止線推定処理を示すフローチャートである。これらのフローチャートにより、第1の実施の形態の動作を説明する。
【0016】
車載ナビゲーション装置10のナビゲーションコントローラー11は、イグニッションキースイッチ(不図示)がオンすると図2に示す停止線検出プログラムを繰り返し実行する。ステップ1において車両情報入手装置14から車速を入手し、車速が予め設定した停車判定基準値以下か、つまり車両が停車しているか否かを判定する。停車していなければステップ1へ戻り、停車している場合はステップ2へ進む。
【0017】
ステップ2では車両の現在地がイグニッションオン位置と異なるか否かを判定する。車両情報入手装置14からイグニッションキーによるイグニッションオン情報を入手し、イグニッションオン時に現在地検出装置12で検出した車両位置をイグニッションオン位置としてRAM11cに記憶しておく。そして、現在地検出装置12で検出される車両の現在地とRAM11cに記憶されている最新のイグニッションオン位置とを比較し、両者が一致する場合は、車両が例えば駐車場でエンジンを始動したが、そこから動いていないと考えられる。つまり、道路上の停止線で一旦停車しているのではないから、この場合はステップ1へ戻り上述した処理を繰り返す。
【0018】
車両の現在地が最新のイグニッションオン位置と異なる場合は、車両が道路上の停止線で一旦停車している可能性があり、ステップ3へ進む。ステップ3では現在地検出装置12の自律航法においてマッチング道路が存在するか否かを確認する。自律航法においてマッチング道路が存在しない場合は車両が道路以外の駐車場などで停車している可能性が高く、道路上の停止線で一旦停車しているのではないと考えられるから、この場合はステップ1へ戻って上述した処理を繰り返す。
【0019】
現在地検出装置12の自律航法においてマッチング道路が存在する場合にはステップ4へ進み、そのマッチング道路が一般道であるか否かを判定する。マッチング道路が有料道路や高速道路の場合は料金所やサービスエリアなどで停車している可能性が高く、道路上の停止線で一旦停車しているのではないと考えられるから、この場合はステップ1へ戻って上述した処理を繰り返す。
【0020】
マッチング道路が一般道の場合はステップ5へ進み、車両の現在地がハザードオン位置と異なるか否かを判定する。車両情報入手装置14からハザードスイッチのオン情報を入手し、ハザードスイッチオン時に現在地検出装置12で検出した車両位置をハザードオン位置としてRAM11cに記憶しておく。そして、現在地検出装置12で検出される車両の現在地とRAM11cに記憶されている最新のハザードオン位置とを比較する。両者が一致する場合は、車両が路肩に停車している可能性が高く、道路上の停止線で一旦停車していないと考えられるから、この場合はステップ1へ戻って上述した処理を繰り返す。
【0021】
車両の現在地がハザードオン位置と異なる場合はステップ6へ進み、車両情報入手装置14からターンシグナルスイッチの操作情報を入手し、ターンシグナルスイッチが右折側に操作されているか否かを判定する。右折操作中の場合は、交差点に進入して右折待ちの停車をしている可能性が高く、道路上の停止線で一旦停車していないと考えられるから、この場合はステップ1へ戻って上述した処理を繰り返す。
【0022】
右折操作中でない場合はステップ7へ進み、車両情報入手装置14から車間距離検出装置による先行車の検出情報を入手し、所定距離、例えば5m以内に先行車が検出されているか否かを判定する。なお、車間距離検出装置の代わりに、カメラによる車両前方の撮像画像を処理して先行車を検出してもよい。自車のすぐ前に先行車が検出される場合は、道路上の停止線で停車している先行車の後方で停車している可能性が高く、自車が停止線で停車しているのではないと考えられる。この場合は自車の停止位置が停止線位置からずれているので、自車の停止位置を停止線位置とすると停止線位置検出精度が低下してしまう。したがって、この場合はステップ1へ戻って上述した処理を繰り返す。
【0023】
以上のステップ2〜7のすべての条件を満たした場合には、自車が道路上の停止線で一旦停車していると考えられ、ステップ8で現在地検出装置12により車両の停止位置を検出するとともに、道路地図記憶装置13の道路地図データから停止位置のリンクデータと車両進行方向直近のノードデータを読み出す。そして、ステップ9で停止位置の緯度経度データ、リンクデータおよびノードデータを停止線情報として通信装置24により情報センター20へ送信する。
【0024】
なお、ステップ2〜7の停止線停車判定条件のうち、少なくとも1つの判定条件が成立していれば車両が停止線で停車していると判定してもよい。もちろん、ステップ2〜7の判定条件のうち、成立している条件の数が多いほど判定精度が高くなる。また、車載ナビゲーション装置10のナビゲーションコントローラー11の負荷が大きいときは、図2のステップ2〜7の条件の一部を省略したり、条件の判定順序を変更してもよい。
【0025】
情報センター20の処理装置21は図3に示す停止線推定プログラムを繰り返し実行する。ステップ11において車載ナビゲーション装置10から停止線情報を受信したか否かを確認し、停止線情報を受信したらステップ12へ進む。停止線情報には停止位置の緯度経度データ、リンクデータおよび車両進行方向直近のノードデータが含まれる。ステップ12ではノードおよびリンクごとに停止位置データを整理し、停止線情報記憶装置23に記憶する。
【0026】
なお、停止線情報記憶装置23に記憶された停止線情報の内、入手してから所定の期間が経過した情報を消去するようにしてもよい。これにより、最新の停止線情報に基づいてより正確な停止線位置を推定することができる。
【0027】
ステップ13においてノードおよびリンクごとの停止線情報が所定数、例えば100以上蓄積されたか否かを確認し、所定数以上蓄積された場合はステップ14へ進む。各車両から収集されたノードおよびリンクごとの停止線情報が所定数以上蓄積された場合は、ステップ14で所定数以上、蓄積された停止線情報を統計処理する。具体的には停止位置を平均化し、停止線位置を推定する。なお、停止線情報の統計処理を開始する上記所定数には任意の値を設定できるが、所定数を多くするほど停止線位置の推定精度が高くなる。
【0028】
ステップ15において統計処理により推定した停止線位置を道路地図データベース22に停止線データとして記憶する。道路地図データベース22にすでに同一のノードおよびリンクに対する停止線位置が記憶されている場合には、最新の推定位置に更新する。続くステップ16では統計処理により推定した停止線位置と、その停止線位置のノードデータおよびリンクデータを停止線情報として通信装置16により各車両へ配信する。
【0029】
各車両の車載ナビゲーション装置10は、情報センター20から配信された停止線情報を受信し、道路地図記憶装置13に記憶する。道路地図記憶装置13にすでに同一のノードおよびリンクに対する停止線位置が記憶されている場合には、受信した最新の停止線位置に更新する。
【0030】
各車両のナビゲーション装置10は、情報センター20から入手した正確な停止線情報を用いて、停止線直前での警告表示や音声案内などを行ったり、停止線手前で自動的に減速し、停止線で自動的に停車する制御を行い、運転者の運転操作を支援して運転負荷を軽減する。
【0031】
このように、第1の実施の形態によれば、車載ナビゲーション装置において、車両の停車状態が検出されたときに路面に描かれた停止線で停車しているか否かを判定し、停止線で停車していると判定された場合に、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、情報センターにおいて、複数の車載ナビゲーション装置から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信するようにしたので、停止線の塗装の経年劣化や天候などによる路面状況に影響されず、停止線を正確に検出することができる。また、道路工事などにより停止線位置が変わったり、新しく停止線が設置された場合でも、常に最新の停止線位置の情報を提供することができる。
【0032】
また、第1の実施の形態によれば、(1)車両の現在位置がイグニッションオン時の位置と異なるという判定条件、(2)現在地検出装置のマップマッチングにおいてマッチング道路が存在するという判定条件、(3)現在地検出装置のマップマッチングにおいてマッチング道路が存在し、かつそのマッチング道路が一般道であるという判定条件、(4)車両の現在位置がハザードスイッチオン時の位置と異なるという判定条件、(5)ターンシグナルスイッチが右折側に操作されていないという判定条件、(6)車両前方の先行車の有無と車間距離を検出する装置により所定距離以内に先行車が検出されないという判定条件の内のいずれか1または複数の判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定し、情報センターへ停止線情報を送るようにしたので、停止線で停車している場合の停止線情報のみが情報センターへ送られ、そのような停止線情報を用いて停止線推定精度を向上させることができる。
【0033】
《発明の第2の実施の形態》
上述した第1の実施の形態では、車両の状態や走行状況が種々の停車線停止判定条件を満たす場合に、交差点や踏切などの手前の停止線で一旦停車していると判定する例を示したが、これらの判定条件を用いず、自車が停車している場合にはその停車位置を情報センターへ送信し、情報センターで収集した多くのプローブ車両の停車位置の分布から停止線位置を推定する第2の実施の形態を説明する。なお、この第2の実施の形態の構成は図1に示す構成と同様であり、図示と説明を省略する。
【0034】
図4は車載ナビゲーション装置の停止線検出処理を示すフローチャートである。車載ナビゲーション装置10のナビゲーションコントローラー11は、イグニッションキースイッチ(不図示)がオンすると図4に示す停止線検出プログラムを繰り返し実行する。ステップ21において車両情報入手装置14から車速を入手し、車速が予め設定した停車判定基準値以下か、つまり車両が停車しているか否かを判定する。停車していなければステップ21へ戻り、停車している場合はステップ22へ進む。
【0035】
ステップ22では道路地図記憶装置13の道路地図データを参照して車両が今、交差点や踏切などの一旦停車しなければならない場所の近くにいるか否かを判定する。この判定は、道路地図データから進行方向直近の交差点や踏切などの一旦停車しなければならないノード情報を読み出し、車両の現在地から交差点や踏切などのノードまでの距離が例えば30m以内であれば、車両が一旦停車しなければならない場所の近くにいると判定する。車両の現在地がこれらの一旦停車しなければならない場所の近くにいない場合は、道路上の停止線で停車しているのではないと考えられるから、ステップ21へ戻って上述した処理を繰り返す。
【0036】
車両が交差点や踏切などの一旦停車しなければならない場所の近くで停車している場合にはステップ23へ進み、道路地図記憶装置13の道路地図データを参照して、車両の現在位置、すなわち停止線位置と考えられる地点の緯度経度データ、道路リンクデータおよび進行方向直近のノードデータを読み出し、それららを停止線情報として通信装置24により情報センター20へ送信する。
【0037】
次に、情報センター20の停止線推定処理を説明する。情報センター20のおける停止線推定処理は、統計処理方法以外は図3に示す第1の実施の形態の停止線推定処理と同様であり、相違点を中心に説明する。図3のステップ14において多くの車両から収集した同一リンクおよびノードの停止線情報を統計処理し、停止線位置を推定する。
【0038】
図5は多くのプローブ車両から収集したある交差点の停止線情報のイメージを示す。実際の停止線31,32の直前で一旦停車している車両はそれぞれ1台であり、その他の車両は停止線31,32で停車している前車の後方で停車している。いずれの車両も交差点の近くで停車しており、それぞれの停車位置を停車線情報として情報センター20へ送信する。
【0039】
情報センター20では、多くのプローブ車両から収集した停止線情報をリンクおよびノードごとに分類し、情報数が所定数(この実施の形態では100)を超えたリンクおよびノードの停止位置の車両進行方向に対する度数分布を求める。図6に停止位置の度数分布の一例を示す。車両が多く停車する付近は度数が高く、車両が停車する機会が少ない付近は度数が低くなる。本来、停止線の近傍では車両が一旦停止する機会は多いから停止位置の近傍の度数が高く、停止線より後方に行くにつれて車両が停止する機会が減ってくるため、停止位置の度数が徐々に低くなる。一方、停止線から進行方向前方は交差点内や踏切内に入るため、交差点内や踏切内で車両が停車する機会は非常に少ないと考えられ、停止位置の度数は極端に低くなっている。
【0040】
そこで、この第2の実施の形態では、図7に示すように、停止位置の度数分布において停止位置の度数が最も高い位置で、かつその位置の車両進行方向前方で停止位置の度数が極端に低くなっている位置を停止線位置と推定する。
【0041】
このように、第2の実施の形態によれば、車載ナビゲーション装置において、車両の停車状態が検出されたときに、車両の現在地が一旦停車しなければならない場所またはその近くであるか否かを判定し、一旦停車しなければならない場所またはその近くである場合に、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、情報センターにおいて、複数の車載ナビゲーション装置から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信するようにしたので、停止線の塗装の経年劣化や天候などによる路面状況に影響されず、停止線を正確に検出することができる。また、道路工事などにより停止線位置が変わったり、新しく停止線が設置された場合でも、常に最新の停止線位置の情報を提供することができる。
【0042】
《発明の第3の実施の形態》
上述した第2の実施の形態では、車両が停車しているときに、交差点や踏切などの一旦停車しなければならない場所の近くにいるか否かを判定し、一旦停車しなければならない場所の近くにいる場合に、停車位置の緯度経度データ、リンクデータおよび車両進行方向直近のノードのデータを情報センターへ送るようにしたが、この第3の実施の形態では、車両の停車時に交差点や踏切などの一旦停車しなければならない場所の近くにいるか否かを判定する処理を省略する。つまり、車両が停車しているときは、その停車位置の緯度経度データ、リンクデータおよび車両進行方向直近のノードのデータを情報センターへ送り、情報センターにおいて、第2の実施の形態に示したように、リンクおよびノードごとに停止位置を分類し、リンクおよびノードごとの停止位置データの蓄積量が所定数、例えば200を超えたら、そのリンクおよびノードの停止位置を統計処理する。すなわち、停止位置の度数分布を作成し、停止位置の度数が最も高い位置で、かつその位置の車両進行方向前方で停止位置の度数が極端に低くなっている位置を停止線位置と推定する。
【0043】
この第3の実施の形態では、交差点や踏切などの一旦停車しなければならない場所で停車したときの停止位置データに加え、駐車場や道路の路肩などの一旦停車しなくてもよい場所で停車したときの停止位置データも情報センターへ送られ、情報センターの負担が多くなるが、車載機における判定処理、すなわち、車両の停車時に交差点や踏切などの一旦停車しなければならない場所の近くにいるか否かを判定する処理が省略でき、車載機の負担が軽減される。情報センターには処理能力の高い大型コンピューターが設置されるから、情報センター側の負担増は問題にならない。
【0044】
ただし、この第3の実施の形態では、統計処理を行う条件である、リンクおよびノードごとの停止位置データの蓄積量を第2の実施の形態よりも多くし、駐車場や道路の路肩に停車した場合の停止位置データに対する統計処理を行わないようにし、車載機による上記判定処理を省略したことによる停止線位置の推定精度の低下を防ぐようにするのが望ましい。
【0045】
このように第3の実施の形態によれば、車載ナビゲーション装置において、車両の停車状態が検出されたときに、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、情報センターにおいて、複数の車載ナビゲーション装置から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信するようにしたので、停止線の塗装の経年劣化や天候などによる路面状況に影響されず、停止線を正確に検出することができる。また、道路工事などにより停止線位置が変わったり、新しく停止線が設置された場合でも、常に最新の停止線位置の情報を提供することができる。
【0046】
特許請求の範囲の構成要素と一実施の形態の構成要素との対応関係は次の通りである。すなわち、道路地図記憶装置13が地図記憶手段を、現在地検出装置12が位置検出手段を、車両情報入手装置14およびナビゲーションコントローラー11が停車検出手段および停車判定手段を、通信装置16およびナビゲーションコントローラー11が情報送信手段を、処理装置21が位置推定手段を、通信装置24および処理装置21が情報配信手段をそれぞれ構成する。なお、以上の説明はあくまで一例であり、発明を解釈する際、上記の実施の形態の記載事項と特許請求の範囲の記載事項との対応関係になんら限定も拘束もされない。
【図面の簡単な説明】
【0047】
【図1】第1の実施の形態の構成を示す図である。
【図2】第1の実施の形態の車載ナビゲーション装置の停止線検出処理を示すフローチャートである。
【図3】第1の実施の形態の情報センターの停止線推定処理を示すフローチャートである。
【図4】第2の実施の形態の車載ナビゲーション装置の停止線検出処理を示すフローチャートである。
【図5】複数の車両から収集したある交差点付近の停止位置情報を示す図である。
【図6】ある交差点付近の停止位置分布を示す図である。
【図7】停止線位置の推定方法を示す図である。
【符号の説明】
【0048】
10 車載ナビゲーション装置
11 ナビゲーションコントローラー
12 現在地検出装置
13 道路地図記憶装置
14 車両情報入手装置
16 通信装置
20 情報センター
21 処理装置
22 道路地図データベース
23 停止線情報記憶装置
24 通信装置
【特許請求の範囲】
【請求項1】
道路地図データを記憶する地図記憶手段と、
車両の現在位置を検出する位置検出手段と、
車両の停車状態を検出する停車検出手段と、
車両の停車状態が検出されたときに、前記位置検出手段により車両の停止位置を検出するとともに、前記地図記憶手段から停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信する情報送信手段とを備えた複数の車載停止線検出装置と、
前記複数の車載停止線検出装置から停止線情報を収集してリンクおよびノードごとに分類し、リンクおよびノードごとに前記複数の車載停止線検出装置の停止位置データを統計処理して停止線位置を推定する位置推定手段と、
前記位置推定手段により推定された停止線位置を前記複数の車載停止線検出装置へ配信する情報配信手段とを備えた情報センターとから成ることを特徴とする車両用停止線検出システム。
【請求項2】
複数の車載停止線検出装置から停止線情報を収集してリンクおよびノードごとに分類し、リンクおよびノードごとに複数の車載停止線検出装置の停止位置データを統計処理して停止線位置を推定する位置推定手段と、
前記位置推定手段により推定された停止線位置を複数の車載停止線検出装置へ配信する情報配信手段とを備えた情報センターへ停止線情報を送信する車載停止線検出装置であって、
道路地図データを記憶する地図記憶手段と、
車両の現在位置を検出する位置検出手段と、
車両の停車状態を検出する停車検出手段と、
車両の停車状態が検出されたときに、前記位置検出手段により車両の停止位置を検出するとともに、前記地図記憶手段から停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信する情報送信手段とを備えることを特徴とする車載停止線検出装置。
【請求項3】
道路地図データを記憶する地図記憶手段と、
車両の現在位置を検出する位置検出手段と、
車両の停車状態を検出する停車検出手段と、
車両の停車状態が検出されたときに、前記位置検出手段により車両の停止位置を検出するとともに、前記地図記憶手段から停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信する情報送信手段とを備える車載停止線検出装置から停止線情報を収集する情報センターであって、
前記複数の車載停止線検出装置から収集した停止線情報をリンクおよびノードごとに分類し、リンクおよびノードごとに前記複数の車載停止線検出装置の停止位置データを統計処理して停止線位置を推定する位置推定手段と、
前記位置推定手段により推定された停止線位置を前記複数の車載停止線検出装置へ配信する情報配信手段とを備えることを特徴とする情報センター。
【請求項4】
車載機において、車両の停車状態が検出されたときに、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、
情報センターにおいて、複数の車載機から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信することを特徴とする車両用停止線検出方法。
【請求項5】
道路地図データを記憶する地図記憶手段と、
車両の現在位置を検出する位置検出手段と、
車両の停車状態を検出する停車検出手段と、
車両の停車状態が検出されたときに、路面に描かれた停止線で停車しているか否かを判定する停車判定手段と、
前記停車判定手段により停止線で停車していると判定された場合に、前記位置検出手段により車両の停止位置を検出するとともに、前記地図記憶手段から停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信する情報送信手段とを備えた複数の車載停止線検出装置と、
前記複数の車載停止線検出装置から停止線情報を収集してリンクおよびノードごとに分類し、リンクおよびノードごとに前記複数の車載停止線検出装置の停止位置データを統計処理して停止線位置を推定する位置推定手段と、
前記位置推定手段により推定された停止線位置を前記複数の車載停止線検出装置へ配信する情報配信手段とを備えた情報センターとから成ることを特徴とする車両用停止線検出システム。
【請求項6】
複数の車載停止線検出装置から停止線情報を収集してリンクおよびノードごとに分類し、リンクおよびノードごとに複数の車載停止線検出装置の停止位置データを統計処理して停止線位置を推定する位置推定手段と、
前記位置推定手段により推定された停止線位置を複数の車載停止線検出装置へ配信する情報配信手段とを備えた情報センターへ停止線情報を送信する車載停止線検出装置であって、
道路地図データを記憶する地図記憶手段と、
車両の現在位置を検出する位置検出手段と、
車両の停車状態を検出する停車検出手段と、
車両の停車状態が検出されたときに、路面に描かれた停止線で停車しているか否かを判定する停車判定手段と、
前記停車判定手段により停止線で停車していると判定された場合に、前記位置検出手段により車両の停止位置を検出するとともに、前記地図記憶手段から停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信する情報送信手段とを備えることを特徴とする車載停止線検出装置。
【請求項7】
道路地図データを記憶する地図記憶手段と、
車両の現在位置を検出する位置検出手段と、
車両の停車状態を検出する停車検出手段と、
車両の停車状態が検出されたときに、路面に描かれた停止線で停車しているか否かを判定する停車判定手段と、
前記停車判定手段により停止線で停車していると判定された場合に、前記位置検出手段により車両の停止位置を検出するとともに、前記地図記憶手段から停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信する情報送信手段とを備える車載停止線検出装置から停止線情報を収集する情報センターであって、
前記複数の車載停止線検出装置から収集した停止線情報をリンクおよびノードごとに分類し、リンクおよびノードごとに前記複数の車載停止線検出装置の停止位置データを統計処理して停止線位置を推定する位置推定手段と、
前記位置推定手段により推定された停止線位置を前記複数の車載停止線検出装置へ配信する情報配信手段とを備えることを特徴とする情報センター。
【請求項8】
前記停車判定手段は、少なくとも車両の現在位置がイグニッションオン時の位置と異なるという判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項9】
前記停車判定手段は、少なくとも前記位置検出手段のマップマッチングにおいてマッチング道路が存在するという判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項10】
前記停車判定手段は、少なくとも前記位置検出手段のマップマッチングにおいてマッチング道路が存在し、かつそのマッチング道路が一般道であるという判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項11】
前記停車判定手段は、少なくとも車両の現在位置がハザードスイッチオン時の位置と異なるという判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項12】
前記停車判定手段は、少なくともターンシグナルスイッチが右折側に操作されていないという判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項13】
前記停車判定手段は、少なくとも車両前方の先行車の有無と車間距離を検出する装置により所定距離以内に先行車が検出されないという判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項14】
前記停車判定手段は、少なくとも車両の現在位置が一旦停車しなければならない場所またはその近くであるという判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項15】
前記位置推定手段は、前記複数の車載停止線検出装置から収集したリンクおよびノードごとの停止位置を平均化し、停止線位置を推定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項16】
前記位置推定手段は、前記複数の車載停止線検出装置から収集したリンクおよびノードごとの停止位置の車両進行方向に対する分布を求め、停止位置の度数が最も高い位置で、かつその位置の車両進行方向前方で停止位置の度数が極端に低くなっている位置を停止線位置と推定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項17】
車載機において、車両の停車状態が検出されたときに路面に描かれた停止線で停車しているか否かを判定し、停止線で停車していると判定された場合に、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、
情報センターにおいて、複数の車載機から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信することを特徴とする車両用停止線検出方法。
【請求項1】
道路地図データを記憶する地図記憶手段と、
車両の現在位置を検出する位置検出手段と、
車両の停車状態を検出する停車検出手段と、
車両の停車状態が検出されたときに、前記位置検出手段により車両の停止位置を検出するとともに、前記地図記憶手段から停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信する情報送信手段とを備えた複数の車載停止線検出装置と、
前記複数の車載停止線検出装置から停止線情報を収集してリンクおよびノードごとに分類し、リンクおよびノードごとに前記複数の車載停止線検出装置の停止位置データを統計処理して停止線位置を推定する位置推定手段と、
前記位置推定手段により推定された停止線位置を前記複数の車載停止線検出装置へ配信する情報配信手段とを備えた情報センターとから成ることを特徴とする車両用停止線検出システム。
【請求項2】
複数の車載停止線検出装置から停止線情報を収集してリンクおよびノードごとに分類し、リンクおよびノードごとに複数の車載停止線検出装置の停止位置データを統計処理して停止線位置を推定する位置推定手段と、
前記位置推定手段により推定された停止線位置を複数の車載停止線検出装置へ配信する情報配信手段とを備えた情報センターへ停止線情報を送信する車載停止線検出装置であって、
道路地図データを記憶する地図記憶手段と、
車両の現在位置を検出する位置検出手段と、
車両の停車状態を検出する停車検出手段と、
車両の停車状態が検出されたときに、前記位置検出手段により車両の停止位置を検出するとともに、前記地図記憶手段から停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信する情報送信手段とを備えることを特徴とする車載停止線検出装置。
【請求項3】
道路地図データを記憶する地図記憶手段と、
車両の現在位置を検出する位置検出手段と、
車両の停車状態を検出する停車検出手段と、
車両の停車状態が検出されたときに、前記位置検出手段により車両の停止位置を検出するとともに、前記地図記憶手段から停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信する情報送信手段とを備える車載停止線検出装置から停止線情報を収集する情報センターであって、
前記複数の車載停止線検出装置から収集した停止線情報をリンクおよびノードごとに分類し、リンクおよびノードごとに前記複数の車載停止線検出装置の停止位置データを統計処理して停止線位置を推定する位置推定手段と、
前記位置推定手段により推定された停止線位置を前記複数の車載停止線検出装置へ配信する情報配信手段とを備えることを特徴とする情報センター。
【請求項4】
車載機において、車両の停車状態が検出されたときに、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、
情報センターにおいて、複数の車載機から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信することを特徴とする車両用停止線検出方法。
【請求項5】
道路地図データを記憶する地図記憶手段と、
車両の現在位置を検出する位置検出手段と、
車両の停車状態を検出する停車検出手段と、
車両の停車状態が検出されたときに、路面に描かれた停止線で停車しているか否かを判定する停車判定手段と、
前記停車判定手段により停止線で停車していると判定された場合に、前記位置検出手段により車両の停止位置を検出するとともに、前記地図記憶手段から停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信する情報送信手段とを備えた複数の車載停止線検出装置と、
前記複数の車載停止線検出装置から停止線情報を収集してリンクおよびノードごとに分類し、リンクおよびノードごとに前記複数の車載停止線検出装置の停止位置データを統計処理して停止線位置を推定する位置推定手段と、
前記位置推定手段により推定された停止線位置を前記複数の車載停止線検出装置へ配信する情報配信手段とを備えた情報センターとから成ることを特徴とする車両用停止線検出システム。
【請求項6】
複数の車載停止線検出装置から停止線情報を収集してリンクおよびノードごとに分類し、リンクおよびノードごとに複数の車載停止線検出装置の停止位置データを統計処理して停止線位置を推定する位置推定手段と、
前記位置推定手段により推定された停止線位置を複数の車載停止線検出装置へ配信する情報配信手段とを備えた情報センターへ停止線情報を送信する車載停止線検出装置であって、
道路地図データを記憶する地図記憶手段と、
車両の現在位置を検出する位置検出手段と、
車両の停車状態を検出する停車検出手段と、
車両の停車状態が検出されたときに、路面に描かれた停止線で停車しているか否かを判定する停車判定手段と、
前記停車判定手段により停止線で停車していると判定された場合に、前記位置検出手段により車両の停止位置を検出するとともに、前記地図記憶手段から停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信する情報送信手段とを備えることを特徴とする車載停止線検出装置。
【請求項7】
道路地図データを記憶する地図記憶手段と、
車両の現在位置を検出する位置検出手段と、
車両の停車状態を検出する停車検出手段と、
車両の停車状態が検出されたときに、路面に描かれた停止線で停車しているか否かを判定する停車判定手段と、
前記停車判定手段により停止線で停車していると判定された場合に、前記位置検出手段により車両の停止位置を検出するとともに、前記地図記憶手段から停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信する情報送信手段とを備える車載停止線検出装置から停止線情報を収集する情報センターであって、
前記複数の車載停止線検出装置から収集した停止線情報をリンクおよびノードごとに分類し、リンクおよびノードごとに前記複数の車載停止線検出装置の停止位置データを統計処理して停止線位置を推定する位置推定手段と、
前記位置推定手段により推定された停止線位置を前記複数の車載停止線検出装置へ配信する情報配信手段とを備えることを特徴とする情報センター。
【請求項8】
前記停車判定手段は、少なくとも車両の現在位置がイグニッションオン時の位置と異なるという判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項9】
前記停車判定手段は、少なくとも前記位置検出手段のマップマッチングにおいてマッチング道路が存在するという判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項10】
前記停車判定手段は、少なくとも前記位置検出手段のマップマッチングにおいてマッチング道路が存在し、かつそのマッチング道路が一般道であるという判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項11】
前記停車判定手段は、少なくとも車両の現在位置がハザードスイッチオン時の位置と異なるという判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項12】
前記停車判定手段は、少なくともターンシグナルスイッチが右折側に操作されていないという判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項13】
前記停車判定手段は、少なくとも車両前方の先行車の有無と車間距離を検出する装置により所定距離以内に先行車が検出されないという判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項14】
前記停車判定手段は、少なくとも車両の現在位置が一旦停車しなければならない場所またはその近くであるという判定条件が成立した場合に、車両が路面に描かれた停止線で停車していると判定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項15】
前記位置推定手段は、前記複数の車載停止線検出装置から収集したリンクおよびノードごとの停止位置を平均化し、停止線位置を推定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項16】
前記位置推定手段は、前記複数の車載停止線検出装置から収集したリンクおよびノードごとの停止位置の車両進行方向に対する分布を求め、停止位置の度数が最も高い位置で、かつその位置の車両進行方向前方で停止位置の度数が極端に低くなっている位置を停止線位置と推定することを特徴とする請求項5に記載の車両用停止線検出システム、または請求項6に記載の車載停止線検出装置、または請求項7に記載の情報センター。
【請求項17】
車載機において、車両の停車状態が検出されたときに路面に描かれた停止線で停車しているか否かを判定し、停止線で停車していると判定された場合に、車両の停止位置を検出するとともに、道路地図データから停止位置のリンクデータと進行方向直近のノードデータを読み出し、停止位置データ、リンクデータおよびノードデータを停止線情報として情報センターへ送信し、
情報センターにおいて、複数の車載機から停止線情報を収集してリンクおよびノードごとに分類するとともに、リンクおよびノードごとに複数の車載機の停止位置データを統計処理して停止線位置を推定し、推定した停止線位置を複数の車載機へ配信することを特徴とする車両用停止線検出方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−41916(P2007−41916A)
【公開日】平成19年2月15日(2007.2.15)
【国際特許分類】
【出願番号】特願2005−226568(P2005−226568)
【出願日】平成17年8月4日(2005.8.4)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成19年2月15日(2007.2.15)
【国際特許分類】
【出願日】平成17年8月4日(2005.8.4)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]