
車両用制動制御装置
【課題】ブレーキ操作量の増加に対して車両への制動力が上昇しない無効操作量を極力減少させることでドライバーの違和感を防止する。
【解決手段】車両用制動制御装置は、ブレーキ操作量Sが助勢限界操作量Smよりも小さい所定のサーボ特性変更操作量S2xに達すると、サーボ特性を入力ピストン12が出力ピストン13に当接した後のブレーキ操作量の増加に対する液圧制動力の増加割合に近い無効操作量低減サーボ特性に変更する制御手段を備える。
【解決手段】車両用制動制御装置は、ブレーキ操作量Sが助勢限界操作量Smよりも小さい所定のサーボ特性変更操作量S2xに達すると、サーボ特性を入力ピストン12が出力ピストン13に当接した後のブレーキ操作量の増加に対する液圧制動力の増加割合に近い無効操作量低減サーボ特性に変更する制御手段を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、ブレーキ操作量に応じて車両に付与する制動力を制御する車両用制動制御装置に関し、特に、ドライバーがブレーキペダルを高減速度領域で踏み込んでも制動力が増加しない無効操作量を低減する車両用制動制御装置に関する。
【背景技術】
【0002】
従来、車両用制動制御装置として例えば特許文献1に記載の装置がある。この装置は、シリンダ内に入力ピストンと出力ピストンを摺動自在に嵌合すると共に、入力ピストンにより出力ピストンを押圧可能とし、電源が正常時には、入力ピストンに連結されているブレーキペダルの操作量に応じた作動液圧を出力ピストンに作用させることで、車輪を制動するホイールシリンダに制動液圧を供給している。一方、電源がダウンしたときは、ブレーキペダルから入力ピストンを介して直接出力ピストンを押動することによりブレーキペダルの操作量に応じた制動液圧を、出力ピストンからホイールシリンダに供給している。これにより適正に車輪に制動力を付与して安全性の向上を図っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−62614号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
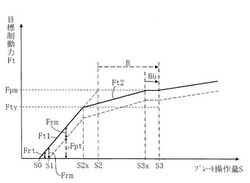
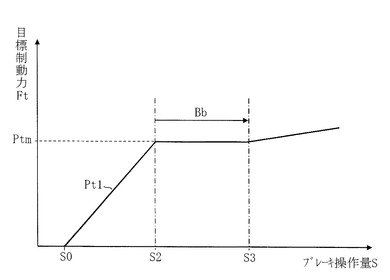
ところで、特許文献1の装置においては、図7に示すように、ブレーキ操作量SがS0からS2に増加する間、目標作動液圧液Ptはブレーキ操作量Sに対して実線Pt1に沿ったサーボ特性で増加している。ブレーキペダルが高減速度領域に踏み込まれブレーキ操作量がS2になると、目標作動液圧Ptは助勢限界作動液圧Ptmに到達するので、入力ピストンが出力ピストンに当接するまでの間は、ブレーキ操作量Sが増加しても作動液圧Pが増加しない無効操作量Bbとなる。入力ピストンが直接出力ピストンを押動するようになると作動液圧Pはドライバーの踏力に応じて増加する。
【0005】
ブレーキペダルが高減速度領域に踏み込まれた状態で、無効操作量Bbが長くなると、この間ブレーキ操作量Sが増加しても作動液圧P延いては車両の制動力が増加しないので、ドライバーが違和感を感じるという問題がある。
【0006】
本発明は、このような事情に鑑みてなされたものであり、ブレーキ操作量の増加時にホイールシリンダへの制動液圧が上昇しない無効操作量を極力減少させることでドライバーに違和感を感じさせないようにすることができる車両用制動制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するためになされた請求項1に係る発明の構成上の特徴は、ブレーキ操作部材に連動してシリンダ内を摺動する入力ピストンと、前記入力ピストンと分離され、前記ブレーキ操作部材の操作により前記入力ピストンに対し離間又は当接して、前記シリンダ内を摺動する出力ピストンとを有しているマスタシリンダと、前記マスタシリンダに形成された駆動液圧室に接続され、当該駆動液圧室内の液圧である駆動液圧を、所定の助勢限界液圧を超えない範囲で調整する駆動液圧調整装置とを備え、前記入力ピストンが前記出力ピストンに対し離間している状態では、前記出力ピストンが前記駆動液圧に駆動されて前記シリンダ内を摺動することで、前記マスタシリンダに形成されたマスタ液圧室内の液圧であるマスタ液圧が変化し、前記入力ピストンが前記出力ピストンに当接している状態では、前記入力ピストン及び前記出力ピストンが、前記ブレーキ操作部材に連動して前記シリンダ内を摺動することで、前記マスタ液圧が変化する車両用制動装置に適用され、前記駆動液圧が前記助勢限界液圧を超えていない場合に、当該出力ピストンが前記入力ピストンに対して離間するように、前記駆動液圧調整装置により前記駆動液圧を制御する車両用制動制御装置において、前記ブレーキ操作部材の操作量を検出するブレーキ操作量検出手段と、前記ブレーキ操作量検出手段により検出された前記ブレーキ操作部材の操作量であるブレーキ操作量が所定のサーボ特性変更操作量未満である場合には、前記ブレーキ操作量の増大量に対する前記駆動液圧の増大量が所定値である第1サーボ特性に基づいて、前記駆動液圧調整装置により前記駆動液圧を制御し、前記ブレーキ操作量が前記サーボ特性変更操作量以上である場合には、前記第1サーボ特性よりも前記ブレーキ操作量の増大量に対する前記駆動液圧の増大量が小さい第2サーボ特性に基づいて、前記駆動液圧調整装置により前記駆動液圧を制御する駆動液圧制御手段と、を備え、前記サーボ特性変更操作量は、仮に前記ブレーキ操作量にかかわらず前記第1サーボ特性に基づいて前記駆動液圧を前記ブレーキ操作量の増大に応じて増大させた場合に、当該駆動液圧が前記助勢限界液圧となる前記ブレーキ操作部材の操作量である助勢限界操作量よりも小さい操作量に設定されていることである。
【0008】
請求項2に係る発明の構成上の特徴は、前記助勢限界液圧から前記サーボ特性変更操作量における前記駆動液圧を減じて液圧差を算出し、前記入力ピストン及び前記出力ピストンが離間した状態から両ピストンが当接する時点の前記ブレーキ操作部材の操作量である当接ブレーキ操作量から前記サーボ特性変更操作量を減じて操作量差を算出し、前記液圧差を前記操作量差で除した値を、前記第2サーボ特性として設定する第2サーボ特性設定手段を備え、前記駆動液圧制御手段は、前記第2サーボ特性設定手段により設定された第2サーボ特性に基づいて、前記ブレーキ操作量が前記サーボ特性変更操作量以上である場合の前記駆動液圧制御を実施することである。
【0009】
請求項3に係る発明の構成上の特徴は、前記ブレーキ操作量と前記マスタ液圧との関係において、前記第1サーボ特性に基づく駆動液圧制御時の特性線と前記入力ピストンが前記出力ピストンに当接した状態における特性線との交点におけるブレーキ操作量を、前記サーボ特性変更操作量として設定するサーボ特性変更操作量設定手段を備え、前記駆動液圧制御手段は、前記サーボ特性変更操作量設定手段により設定されたサーボ特性変更操作量に基づいて、前記駆動液圧制御を実施することである。
【0010】
請求項4に係る発明の構成上の特徴は、前記マスタ液圧を検出するマスタ液圧検出手段と、前記マスタ液圧検出手段により検出されたマスタ液圧の前記ブレーキ操作量の増大量に対する増大量に基づいて、前記当接ブレーキ操作量を算出する当接ブレーキ操作量算出手段を備え、前記第2サーボ特性設定手段は、前記当接ブレーキ操作量算出手段により算出された当接ブレーキ操作量に基づいて前記第2サーボ特性を設定することである。
【0011】
請求項5に係る発明の構成上の特徴は、前記マスタ液圧を検出するマスタ液圧検出手段と、前記マスタ液圧検出手段により検出されたマスタ液圧に基づいて前記マスタ液圧室から送出されたブレーキ液の液量を算出し、当該液量を前記出力ピストンの断面積で除した値に所定値を足した値を、前記当接ブレーキ操作量として算出する当接ブレーキ操作量算出手段を備え、前記第2サーボ特性設定手段は、前記当接ブレーキ操作量算出手段により算出された当接ブレーキ操作量に基づいて前記第2サーボ特性を設定することである。
【0012】
請求項6に係る発明の構成上の特徴は、前記駆動液圧が前記助勢限界液圧に達するか否かを判定する駆動液圧変化判定手段を備え、前記駆動液圧制御手段は、前記駆動液圧変化判定手段により前記駆動液圧が前記助勢限界液圧に達することが判定されている場合に、前記第1サーボ特性から前記第2サーボ特性への変更を実施することである。
【発明の効果】
【0013】
本発明は、ブレーキ操作部材に連動してシリンダ内を摺動する入力ピストンと、入力ピストンと分離され、ブレーキ操作部材の操作により入力ピストンに対し離間又は当接して、シリンダ内を摺動する出力ピストンとを有しているマスタシリンダと、当該マスタシリンダに形成された駆動液圧室に接続され、同駆動液圧室内の液圧である駆動液圧を、所定の助勢限界液圧を超えない範囲で調整する駆動液圧調整装置とを備え、入力ピストンが出力ピストンに対し離間している状態では、出力ピストンが駆動液圧に駆動されてシリンダ内を摺動することで、マスタシリンダに形成されたマスタ液圧室内の液圧であるマスタ液圧が変化し、入力ピストンが出力ピストンに当接している状態では、入力ピストン及び出力ピストンが、ブレーキ操作部材に連動してシリンダ内を摺動することで、マスタ液圧が変化する車両用制動装置に適用され、駆動液圧が助勢限界液圧を超えていない場合に、当該出力ピストンが入力ピストンに対して離間するように、駆動液圧調整装置により駆動液圧を制御する車両用制動制御装置である。
【0014】
上述の車両用制動装置に上述の車両用制動制御装置を適用した場合、駆動液圧が助勢限界液圧に達した後のブレーキ操作部材の操作量の増大に伴って、同ブレーキ操作部材に連動する入力ピストンが、駆動液圧に駆動される出力ピストンに近接し、ひいては出力ピストンに当接する。入力ピストンが出力ピストンに当接した後は、入力ピストン及び出力ピストンがブレーキ操作部材に連動し、マスタ液圧が増大するものの、駆動液圧が助勢限界液圧に達してから入力ピストンが出力ピストンに当接するまでの間は、ブレーキ操作部材の操作量がとしても出力ピストンがシリンダ内を摺動せず、マスタ液圧が変化しないことが考えられる。その結果、ブレーキ操作部材の操作量を増大させているにもかからず、制動力が増大しないという違和感をドライバーに与えることが懸念される。
【0015】
これに対して、請求項1に記載の発明では、ブレーキ操作部材の操作量が所定のサーボ特性変更操作量未満である場合には、ブレーキ操作部材の操作量の増大量に対する駆動液圧の増大量が所定値である第1サーボ特性に基づいて、駆動液圧調整装置により駆動液圧を制御し、ブレーキ操作量がサーボ特性変更操作量以上である場合には、第1サーボ特性よりもブレーキ操作量の増大量に対する駆動液圧の増大量が小さい第2サーボ特性に基づいて、駆動液圧調整装置により駆動液圧を制御するようにしている。ここで、上記サーボ特性変更操作量は、仮にブレーキ操作量にかかわらず第1サーボ特性に基づいて駆動液圧をブレーキ操作量の増大に応じて増大させた場合に、当該駆動液圧が助勢限界液圧となるブレーキ操作部材の操作量である助勢限界操作量よりも小さい操作量に設定されている。
【0016】
そのため、ブレーキ操作部材の操作量にかかわらず第1サーボ特性に基づいて駆動液圧をブレーキ操作部材の操作量の増大に応じて増大させた場合よりも、駆動液圧が助勢限界液圧に達するブレーキ操作部材の操作量が大きくなり、駆動液圧が助勢限界液圧に達してから入力ピストンが出力ピストンに当接するまでのブレーキ操作部材の操作量が小さくなる。これにより、上記ブレーキ操作部材の操作量を増大させているにもかからず、制動力が増大しないという違和感を軽減することができる。
【0017】
請求項2に記載の発明では、第2サーボ特性設定手段によって、助勢限界液圧からサーボ特性変更操作量における駆動液圧を減じて液圧差を算出し、入力ピストン及び出力ピストンが離間した状態から両ピストンが当接する時点のブレーキ操作部材の操作量である当接ブレーキ操作量からサーボ特性変更操作量を減じて操作量差を算出し、液圧差を操作量差で除した値を、第2サーボ特性として設定する。駆動液圧制御手段は、第2サーボ特性設定手段により設定された第2サーボ特性に基づいて、ブレーキ操作量がサーボ特性変更操作量以上である場合の駆動液圧制御を実施するので、ブレーキ操作量が助勢限界液圧に到達する位置を、無効操作量が小さくなるように適切に設定することができる。
【0018】
請求項3に記載の発明では、サーボ特性変更操作量設定手段によって、ブレーキ操作量とマスタ液圧との関係において、第1サーボ特性に基づく駆動液圧制御時の特性線と入力ピストンが出力ピストンに当接した状態における特性線との交点におけるブレーキ操作量を、サーボ特性変更操作量として設定する。駆動液圧制御手段は、サーボ特性変更操作量設定手段により設定されたサーボ特性変更操作量に基づいて、駆動液圧制御を実施するので、ブレーキ操作量が助勢限界液圧に到達する位置を、無効操作量が略無くなるように適切に設定することができる。
【0019】
請求項4に記載の発明では、当接ブレーキ操作量算出手段によって、マスタ液圧検出手段により検出されたマスタ液圧のブレーキ操作量の増大量に対する増大量に基づいて、当接ブレーキ操作量を算出する。そして、第2サーボ特性設定手段が、当接ブレーキ操作量算出手段により算出された当接ブレーキ操作量に基づいて第2サーボ特性を設定する。従って、その第2サーボ特性に基づいて、当接ブレーキ操作量が助勢限界液圧に到達する位置を適切に設定することができる。
【0020】
請求項5に記載の発明では、当接ブレーキ操作量算出手段によって、マスタ液圧検出手段により検出されたマスタ液圧に基づいてマスタ液圧室から送出されたブレーキ液の液量を算出し、当該液量を出力ピストンの断面積で除した値に所定値を足した値を、当接ブレーキ操作量として算出する。そして、第2サーボ特性設定手段が、当接ブレーキ操作量算出手段により算出された当接ブレーキ操作量に基づいて第2サーボ特性を設定する。従って、第2サーボ特性に基づいて、当接ブレーキ操作量が助勢限界液圧に到達する位置を適切に設定することができる。
【0021】
請求項6に係る発明によれば、駆動液圧変化判定手段によって駆動液圧が助勢限界液圧に達するか否かを判定する。駆動液圧制御手段が、駆動液圧変化判定手段により駆動液圧が助勢限界液圧に達することが判定されている場合に、第1サーボ特性から第2サーボ特性への変更を実施するので、第1サーボ特性から第2サーボ特性への変更を適正に行って、駆動液圧が助勢限界液圧に達してから入力ピストンが出力ピストンに当接するまでのブレーキ操作部材の操作量を小さくすることができる。
【図面の簡単な説明】
【0022】
【図1】本実施形態の車両用制動制御装置の構成を示す図である。
【図2】本実施形態の車両用制動制御装置におけるブレーキ操作量と目標制動力との関係を示すブレーキ操作量‐目標制動力マップである。
【図3】作動液圧と液圧制動力との関係を示す作動液圧−液圧制動力マップである。
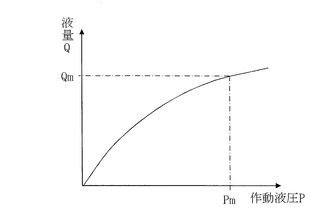
【図4】出力ピストンに作用する作動液圧が各作動液圧になるまでにシリンダから送出された液量を示す作動液圧‐液量グラフである。
【図5】作動液圧−液圧制動力マップの変形例を示す図である。
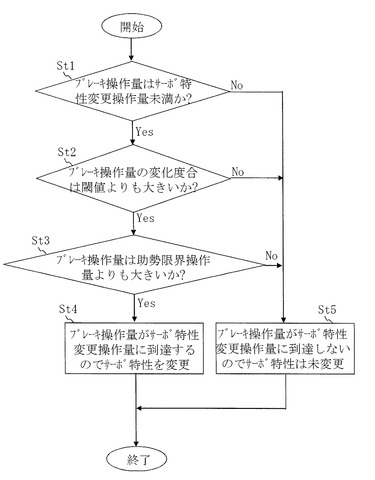
【図6】ブレーキ操作量が助勢限界操作量を超さないと判定した場合に、設定サーボ特性から無効操作量低減サーボ特性に変更しないようにするフローチャートである。
【図7】従来のブレーキ操作量と制動力との関係において無効操作量を示す図である。
【発明を実施するための形態】
【0023】
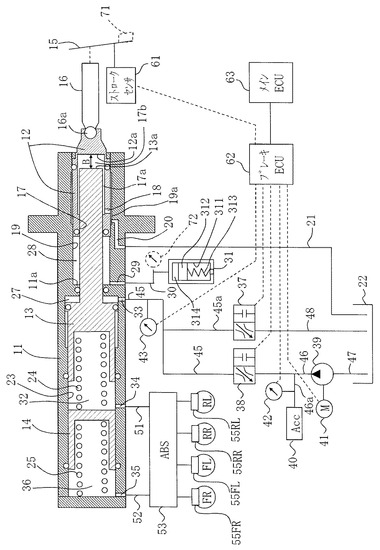
本発明の実施形態の車両用制動制御装置は、例えばハイブリッド車に搭載されており、図1に示すように、基端部が開口して先端部が閉塞した円筒形状を成すシリンダ11を備え、このシリンダ11の内部に基端部から順に入力ピストン12、第1及び第2出力ピストン13,14が各々同軸上に配置されて軸方向に沿って摺動自在に嵌合されている。入力ピストン12は、シリンダ11の基端部外方に一部が突出して配置され、その突出部分にブレーキペダル15の操作ロッド16がピボット16aを用いて連結され、ドライバーによるブレーキペダル15の操作により操作ロッド16を介して移動可能となっている。なお、ブレーキペダル15の移動量をブレーキ操作量とも言う。
【0024】
入力ピストン12は、シリンダ11の基端部側に形成された入力シリンダ穴19に摺動自在に嵌合されている。入力ピストン12には、入力シリンダ穴19内への挿入部分に、先端側が開口し基端部側が閉塞されて閉塞面12aとなった軸穴17が形成されている。この軸穴17に、第1出力ピストン13からシリンダ11の隔壁11aを貫通して基端部側へ延在する円柱状の棒状部分が摺動自在に嵌合されている。この嵌合された棒状部分の端面13aは、入力ピストン12の閉塞面12aと平行状態となっており、それら端面13aと閉塞面12aとの間には、ブレーキペダル15が無操作状態の際に所定距離Bの間隔が確保されるようになっている。
【0025】
入力ピストン12の先端部側の端面と隔壁11aとの間には反力液圧室28が形成され、この反力液圧室28の隔壁11aの近傍にはシリンダ11の周壁を外部に貫通するポート29が形成されている。このポート29は配管30を介して加圧シミュレータ31に接続されている。
【0026】
加圧シミュレータ31は、シリンダ311にピストン312が摺動可能に嵌合され、圧縮スプリング313によって前方に付勢されたピストン312の前面側に液室314が形成され、液室314が配管30を介して反力液圧室28に連通されている。ブレーキペダル15の操作により入力ピストン12が前方に移動されると、反力液圧室28から作動液が液室314に送出されピストン312が圧縮スプリング313の撓み量に比例するばね力に抗して後退される。これにより、反力液圧室28内の圧力がブレーキペダル15の移動量であるブレーキ操作量に応じて上昇し、ブレーキペダル15にはブレーキ操作量に応じた反力が付与される。なお、配管30に反力液圧室28内の圧力を検出する圧力センサ72を設けてもよい。
【0027】
入力ピストン12の軸穴17の内周面と第1出力ピストン13の棒状部分の外周面との間に軸方向に沿って所定ギャップの通路17aが形成されるように、軸穴17は軸線方向に所定長さだけ大径に形成されている。入力ピストン12の周壁には当該周壁を貫通する貫通穴18が通路17aと連通するように形成されている。更に、入力ピストン12の外周面と入力シリンダ穴19の内周面との間に軸方向に沿って所定ギャップの通路19aが形成されるように入力シリンダ穴19は軸線方向に所定長さだけ大径に形成されている。シリンダ11の周壁には断面がクランク形状の通路20が、通路19aの先端付近で連通するように貫通して形成されている。通路20は配管21で、作動液のリザーバタンク22に連通されている。
【0028】
従って、端面13aと閉塞面12aとの間隔部分17bは、通路17a、貫通穴18、通路19a、通路20、配管21を介してリザーバタンク22に連通している。この連通状態は、ブレーキ操作量に係わらず保持され、間隔部分17bは、常時大気に連通されている。
【0029】
シリンダ11には、加圧シリンダ穴23が入力シリンダ穴19と隔壁11aを挟んで形成されている。第1出力ピストン13は、断面コ字形状を呈し、加圧シリンダ穴23に摺動自在に嵌合されている。第1出力ピストン13の先端部側に配置された第2出力ピストン14は断面がコ字形状を呈し、加圧シリンダ穴23内に摺動自在に嵌合されている。
【0030】
隔壁11aと第1出力ピストン13との間に作動液圧室27が形成され、第1出力ピストン13と第2出力ピストン14との間に第1圧力室32が形成され、第2出力ピストン14と加圧シリンダ穴23の先端閉塞面との間に第2圧力室36が形成されている。第1出力ピストン13のコ字形状の凹部底面と第2出力ピストン14の後端面との間に第1圧縮スプリング24が介在され、第2出力ピストン14のコ字形状の凹部底面と加圧シリンダ穴23の先端閉塞面との間に第2圧縮スプリング25が介在されている。これにより、ブレーキペダル15が無操作状態において、第1および第2出力ピストン13、14は第1および第2圧縮スプリング24、25のばね力によってシリンダ11の基端側に付勢され、所定の各不作動位置にそれぞれ停止されている。
【0031】
ブレーキペダル15の無操作状態において、第1出力ピストン13の棒状部分の端面13aは、入力ピストン12の閉塞面12aとの間に、上述した所定距離Bとなる間隔をもって離間状態に保持されている。ドライバーがブレーキペダル15を操作し、入力ピストン12が第1出力ピストン13に対して所定距離Bだけ相対的に前進すると、第1出力ピストン13に当接してこれを押圧可能となっている。
【0032】
作動液圧室27の隔壁11aの近傍にはシリンダ11の周壁を外部に貫通するポート33が形成されている。第1出力ピストン13と第2出力ピストン14との間の第1圧力室32には所定の不作動位置に位置する第2出力ピストン14の後端面近傍にシリンダ11の周壁を外部に貫通するポート34が形成されている。更に、第2出力ピストン14の先端部側とシリンダ11の先端閉塞面との間の第2圧力室36には当該先端閉塞面の近傍に、シリンダ11の周壁を外部に貫通するポート35が形成されている。
【0033】
作動液圧室27のポート33とリザーバタンク22との間には、減圧用リニア弁37、増圧用リニア弁38、液圧ポンプ39、アキュムレータ(Acc)40が液圧供給配管(単に配管ともいう)45,45a,46,46a,47,48で接続されている。即ち、ポート33は配管45に連結され、この配管45の先端には増圧用リニア弁38の出口が連結され、この増圧用リニア弁38の入口は配管46で液圧ポンプ39の吐出口に連結され、液圧ポンプ39の吸入口は配管47でリザーバタンク22に連結されている。液圧ポンプ39には、液圧ポンプ駆動用のモータ41が連結されている。液圧ポンプ39と増圧用リニア弁38とを連結する配管46の途中は分岐しており、この分岐配管46aにアキュムレータ40が連結されている。ポート33と増圧用リニア弁38とを連結する配管45の途中は分岐しており、この分岐配管45aに減圧用リニア弁37の入口が連結され、この減圧用リニア弁37の出口は配管48でリザーバタンク22に連結されている。
【0034】
アキュムレータ40の流出入口に接続された配管46aには、アキュムレータ40に蓄圧された圧力エネルギー(アキュムレータ圧)を検出する圧力センサ42が設けられている。作動液圧室27のポート33に連結された配管45には、作動液圧室27内の液圧を検出する圧力センサ43が設けられている。
【0035】
アキュムレータ40は、液圧ポンプ39により発生した液圧を蓄圧するものであり、この蓄圧された液圧が増圧用リニア弁38を介して作動液圧室27へ供給されることによりブレーキ力(制動力)が得られるようになっている。アキュムレータ圧が所定値以下に低下したことが圧力センサ42によって検出されると液圧ポンプ39は、モータ41によって駆動され、アキュムレータ40に作動液を供給してアキュムレータ40に蓄圧された圧力エネルギーを補給する。また、アキュムレータ40は、液圧ポンプ39が吐出した作動液(ブレーキ油)の脈動を緩和するために液圧ポンプ39の上流側に配置されている。
【0036】
増圧用リニア弁38及び減圧用リニア弁37は、流量調整式の電磁弁であり、作動液圧室27の液圧を高くする場合は、増圧用リニア弁38の絞り抵抗が減少され、減圧用リニア弁37の絞り抵抗が増加されるようになっている。この逆に、作動液圧室27の液圧を低くする場合、増圧用リニア弁38の絞り抵抗が増加され、減圧用リニア弁37の絞り抵抗が減少されるようになっている。増圧用リニア弁38の絞り抵抗を最小とし、減圧用リニア弁37を閉止すると、作動液圧室27に助勢限界液圧Pmが発生する。増圧用リニア弁38を閉止し、減圧用リニア弁37の絞り抵抗を最小にすると作動液圧室27の液圧は無くなる。作動液圧室27に助勢限界液圧Pmを発生させたときに車輪FR〜RLに助勢限界液圧制動力Fpmが付与される。
【0037】
第1圧力室32のポート34及び第2圧力室36のポート35には、各々吐出液圧配管51,52を介してABS(AntilockBrakeSystem)53が連結され、このABS53に、前輪FR,FL及び後輪RR,RL(以降、車輪FR〜RLとも表現する)を制動するブレーキ装置(図示略)を作動させるホイールシリンダ55FR,55FL,55RR,55RL(以降、ホイールシリンダ55FR〜55RLとも表現する)が連結されている。つまり、アキュムレータ40から送出された液圧が増圧用リニア弁38および減圧用リニア弁37によって制御された作動液圧Pが作動液圧室27に発生することにより第1ピストン13延いては第2出力ピストン14が前進して第1及び第2圧力室32,36が加圧される。第1及び第2圧力室32,36の液圧はポート34,35から吐出液圧配管51,52及びABS53を経由してホイールシリンダ55FR〜55RLへ制動液圧として供給され、これによって車輪FR〜RL延いては車両に液圧制動力が付与される。
【0038】
入力シリンダ穴19の内周面と入力ピストン12の外周面との間、加圧シリンダ穴23と第1出力ピストン13及び第2出力ピストン14の外周面との間、並びに、入力ピストン12の軸穴17の内周面及び隔壁11aと第1出力ピストン13の棒状部分の外周面との間には、図1に丸印で示すOリング等のシール部材を装着し、液の漏洩を防止している。
【0039】
このような構成の車両用制動制御装置は、更に、制御手段としてのブレーキECU(電子制御ユニット)62を備え、このブレーキECU62は、ブレーキペダル15に設けられたストロークセンサ61、増圧用リニア弁38、減圧用リニア弁37、圧力センサ42,43、モータ41と電気的に接続されており、更にブレーキECU62の上位制御を行うメインECU63に接続されている。ストロークセンサ61は、ブレーキペダル15のペダルストロークを検出してブレーキECU62へ出力し、ブレーキECU62は、そのペダルストロークからブレーキ操作量Sを求める。
【0040】
ブレーキECU62は、ストロークセンサ61で検出されたブレーキ操作量Sに応じた目標制動力Ftをブレーキ操作量‐目標制動力マップから求め、ブレーキECU62は、その目標制動力Ftを目標回生制動力Frtと目標液圧制動力Fptとに配分する。この目標液圧制動力Fptに応じてブレーキECU62は液圧ブレーキ(液圧制動力)を車輪FR〜RLに付与する。また、目標回生制動力Fptに応じて図略のモータECUが回生ブレーキ(回生制動力)を駆動輪に付与する。即ち、モータECUは、目標回生制動力Frtに応じて図略の電気モータを駆動輪の回転による発電機として作動させることで、回生ブレーキを駆動輪に付与して車両を減速しつつ、運動(回転)エネルギーを電気エネルギーに変換し、この電気エネルギーを図略のインバータを介してバッテリに回収する。
【0041】
ここで、ブレーキ操作が行われ、且つ回生制動が可能で目標回生制動力が0より大きい場合は、車輪に液圧制動力と回生制動力とが付与される回生協調制御が実行される。このとき目標液圧制動力Fptと目標回生制動力Frtとを加算した目標制動力Ftはブレーキ操作量Sに応じて設定される。このブレーキ操作量Sと目標制動力との関係を示すブレーキ操作量‐目標制動力マップの一例を図2に示す。バッテリの充電状況等により回生制動が行えないときにも必要な制動力を確保するためには、ブレーキ操作量に対する目標制動力は、まず液圧制動力で確保できるようにしておく必要がある。従って、ブレーキ操作量‐目標制動力マップは、回生制動力が0であるときのブレーキ操作量Sに対する目標液圧制動力を示すものでもある。
【0042】
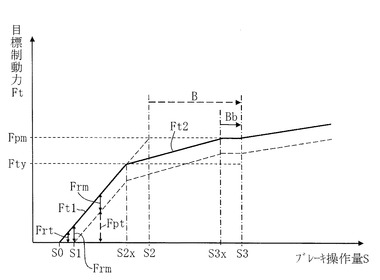
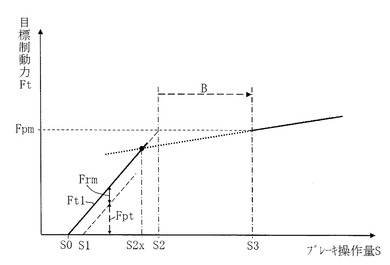
本実施の形態におけるブレーキ操作量‐目標制動力マップでは、図2に示すように、ブレーキ操作量Sが、ブレーキペダル15の遊びが詰まった時点でのブレーキ操作量S0から助勢限界操作量S2より小さい所定のサーボ特性変更操作量S2xに達するまでの間は、目標制動力Ftはブレーキ操作量Sに対して実線Ft1で示す所望の傾きの設定サーボ特性で増加している。助勢限界操作量S2は、設定サーボ特性において目標制動力Ftが助勢限界液圧制動力Fpmとなるときの操作量である。
【0043】
ブレーキ操作量Sがサーボ特性変更操作量S2xを超えて当接ブレーキ操作量S3または当接ブレーキ操作量S3より小さい所定のブレーキ操作量S3xになるまでの間は、ブレーキ操作量Sに対して目標制動力Ftを無効操作量低減サーボ特性で増加させている。無効操作量低減サーボ特性は、助勢限界液圧制動力Fpmから、設定サーボ特性においてサーボ特性変更操作量S2xでの目標制動力Ftを減算した値を、当接ブレーキ操作量S3または当接ブレーキ操作量S3より小さい所定のブレーキ操作量S3xからサーボ特性変更ブレーキ操作量F2xを減算した値で除算して求める。このようにして求めた無効操作量低減サーボ特性は、設定サーボ特性よりもブレーキ操作量Sの増加に対する液圧制動力Fpの増加割合が小さい。
【0044】
その後、入力ピストン12が出力ピストン13当接するまでの間の余裕間隔Bbを無効操作量とし、ブレーキ操作量Sが当接ブレーキ操作量S3を超えると、目標制動力Ftはドライバーの踏力に応じて増加するように設定されている。
【0045】
このブレーキ操作量Sに対する目標制動力Ftは、ブレーキECUのメモリにブレーキ操作量‐目標制動力マップとして記憶されている。回生制動が可能な回生協調制御時には、ブレーキECU62は各ブレーキ操作量Sにおいて目標回生制動力Frtを回生制動の可能な範囲で決定し、目標制動力Ftから目標回生制動力Frtを減算して目標液圧制動力Fptを決定する。
【0046】
ブレーキECU62は、目標液圧制動力Fptに基づいて増圧用リニア弁38および減圧用リニア弁37を作動させ、作動液圧室27に目標液圧制動力Fptに対応する作動液圧Pを発生させ、ホイールシリンダ55FR〜55RLに制動液圧Pを供給して車輪FR〜RLに目標液圧制動力Fptを付与する。図略のモータECUは、駆動輪に連結された電気モータを目標回生制動力Frtに基づいて発電機として作動させ、駆動輪に目標回生制動力Frtを付与する。
【0047】
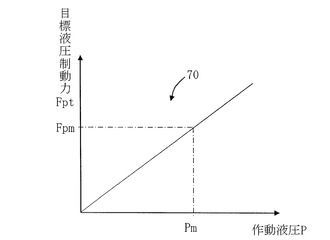
回生協調制御が行われる場合、ブレーキペダル15の踏み込み時に、ブレーキ操作量がS0からS1になるまでの間は、目標液圧制動力は0であり、作動液圧室27に作動液圧Pが発生されず、回生制動のみが行われて目標回生制動力Frtがブレーキ操作量Sに応じて駆動輪に付与される。ストロークセンサ61で検出されたブレーキ操作量Sが、そのときの目標制動力Ftが最大回生制動力Frmと等しくなるときのブレーキ操作量S1を超えた後は、最大回生制動力Frmに加え、目標制動力Ftから最大回生制動力Frmを減算した目標液圧制動力Fptに対応する作動液圧Ptが作動液圧室27に発生され、車輪に目標制動力Ftが付与される。作動液圧室27に発生した作動液圧Pと車輪FR〜RLに付与される液圧制動力Fpとの関係は、別途試験等で求められ、図3に示す作動液圧‐液圧制動力マップ70としてブレーキECU62のメモリに記憶されている。
【0048】
ブレーキペダル15の無操作状態では、第1出力ピストン13の棒状部分の端面13aと入力ピストン12の閉塞面12aとの間隔は所定距離Bに保持されているが、作動液圧室27の液圧が助勢限界液圧Pmに達するとした後のブレーキペダル15の操作量の増大に伴って入力ピストン12が前進することにより、入力ピストン12が第1出力ピストン13に接近し、端面13aと閉塞面12aとの間隔は減少する。
【0049】
目標制動力Ftが助勢限界液圧制動力Fpmとなったときに端面13aと閉塞面12aとが当接するようにすると、ブレーキ操作量が増加しているにも拘らず制動力が増加しないブレーキペダル15の無効操作量を無くすことができる。しかし、目標制動力Ftが助勢限界液圧制動力Fpmとなったときに端面13aと閉塞面12aとが当接するようにすることは製作誤差や部品の弾性変形等から容易ではない。また、ブレーキ操作量に応じて液圧制動力を自由に設定するためには、目標制動力Ftが助勢限界液圧制動力Fptになったときに端面13aと閉塞面12aとの間に余裕間隔Bbを残しておくのが望ましい。
【0050】
本実施の形態によれば、ブレーキ操作量Sがサーボ特性変更操作量S2xを超えて当接ブレーキ操作量S3または当接ブレーキ操作量S3より小さい所定のブレーキ操作量S3xになるまでの間においても、ブレーキ操作量Sに対して目標制動力Ftを無効操作量低減サーボ特性に基づいて増加させることができるので、ブレーキ操作量Sが無効操作量低減サーボ特性において前述の所定のブレーキ操作量S3xに達した後に、ドライバーがブレーキペダル15を踏んでも制動力が上昇しない無効操作量Bbを小さくすることができ、ドライバーが違和感を感じることを防止できる。
【0051】
このように、目標制動力Ftとしての液圧制動力Fpのサーボ特性を、ブレーキ操作量がS0からS2に増加する間は、実線Ft1で示す設定サーボ特性で増加させている。ブレーキ操作量Sが、設定サーボ特性における助勢限界ブレーキ操作量S2より小さい所定のサーボ特性変更ブレーキ操作量S2xになると、サーボ特性を無効操作量低減サーボ特性に変更することにより、液圧制動力Fpが助勢限界液圧制動力Fpmになるときの助勢限界ブレーキ操作量S3xが当接ブレーキ操作位置S3に近づく。つまり、設定サーボ特性を無効操作量低減サーボ特性に変更しない状態で液圧制動力Fpが助勢限界液圧制動力Fpmになるときの助勢限界ブレーキ操作量S2よりも、変更後の無効操作量低減サーボ特性において液圧制動力Fpが助勢限界液圧制動力Fpmになるときの所定のブレーキ操作量S3xの方が当接ブレーキ操作位置S3に近くなるので、無効操作量低減サーボ特性に変更したときの無効操作量Bbが、変更しないときの無効操作量Bよりも小さくなる。
【0052】
このように、ブレーキ操作量の増加時に目標制動力が増加せず、ホイールシリンダ55FR〜55RLに供給される制動液圧が上昇しない無効操作量が減少するので、ドライバーに違和感を感じさせないようにすることができる。
【0053】
無効操作量低減サーボ特性の変形例として、無効操作量低減サーボ特性を、入力ピストン12が出力ピストン13に当接した後のブレーキ操作量Sの増加に対する液圧制動力の増加割合とし、図5において、当接ブレーキ操作量S3と助勢限界液圧制動力Fpmとに対応する座標点を通る無効操作量低減サーボ特性に相当する直線と設定サーボ特性に相当する直線との交点におけるサーボ操作量Sをサーボ特性変更操作量S2xとしてもよい。これによれば、無効操作量Bbを小さくすると共に、入力ピストン12が出力ピストン13に当接する前後の制動力の変化割合を等しくしてフィーリングを向上することができる。
【0054】
次に、無効操作量低減サーボ特性の設定の仕方について説明する。まず当接ブレーキ操作量S3を推定する。作動液圧室27に発生された制御圧力Pに対して吐出液圧配管34、35から送出された液量Qが実測され、図4に示す作動液圧‐液量グラフが作成されている。作動液圧室27に助勢限界液圧Pmが発生されたときに吐出液圧配管34、35から送出される液量Qmが図4の作動液圧‐液量グラフから読み取られ、液量Qmが第1、第2出力ピストン13,14の断面積で除算され、作動液圧室27に助勢限界液圧Pmが発生されたときの第1出力ピストン13の移動量が推定され、この第1出力ピストン13の移動量に、ブレーキペダル15が無操作状態のときの第1出力ピストン13の端面13aと入力ピストン12の閉塞面12aとの間隔の距離Bが加算されて当接ブレーキ操作量S3が推定される。これによれば、当接ブレーキ操作量S3を容易に推定することができる。
【0055】
また、第1圧力室32内又は第2圧力室36内の液圧を検出する液圧センサを備えて、当接ブレーキ操作量S3を、検出された各ブレーキ操作量において検出された出力ピストン13に作用する作動液圧Pの変化に基づいて推定してもよい。即ち、ブレーキ操作量Sをストロークセンサ61によって検出しつつ、検出された各ブレーキ操作量Sにおいて第1圧力室32内又は第2圧力室36内の液圧を上記液圧センサで検出し、その液圧変化しない状態から増加を開始したときのブレーキ操作量を当接ブレーキ操作量S3としてもよい。これによれば、当接ブレーキ操作量S3を正確に推定することができる。
【0056】
助勢限界液圧制動力Fpmは、増圧用リニア弁38を絞り抵抗が最小となるように制御し、減圧用リニア弁37を閉止状態に制御したときに、作動液圧室27に発生し液圧センサ43により検出された助勢限界作動液圧Pmに基づいて図3に示す作動液圧‐液圧制動力マップ70から演算する。
【0057】
無効操作量低減サーボ特性は、助勢限界液圧制動力Fpmから設定サーボ特性におけるサーボ特性変更ブレーキ操作量S2xでの目標制動力Ftyを減算した値(Fpm−Fty)を、当接ブレーキ操作量S3または当接ブレーキ操作量S3より小さい所定のブレーキ操作量S3xからサーボ特性変更ブレーキ操作量S2xを減算した値(S3−S2x)または(S3x−S2x)で除算して求められる。これによれば、目標制動力Ftが助勢限界液圧制動力Fpmになるときのブレーキ操作量Sを当接ブレーキ操作量S3に近づけて、無効操作量Bbが小さくなるように適切に設定することができる。
【0058】
更には、ブレーキ操作量Sが、サーボ特性変更操作量S2xに達するまでのブレーキ操作量Sの変化度合等に基づいて、ブレーキ操作量Sが助勢限界操作量S2を超えるか否か判定し、超えると判定した場合、サーボ特性変更操作量S2xでサーボ特性を設定サーボ特性から無効操作量低減サーボ特性に変更し、超えないと判定した場合、サーボ特性を変更しないようにしてもよい。
【0059】
これは、ブレーキECU62は、図6のステップSt1において、ブレーキ操作量Sがサーボ特性変更操作量S2x未満か否かを判定する。この結果、サーボ特性変更操作量S2x未満であれば、ステップSt2において、例えばブレーキ操作量Sの変化度合を演算し、この変化度合が閾値よりも大きいか否かを判定する。閾値より大きければ、ステップSt3において、ブレーキ操作量Sが助勢限界操作量S2を超えると判定し、ステップSt4において、ブレーキ操作量Sがサーボ特性変更操作量S2xに達するとサーボ特性を設定サーボ特性から無効操作量低減サーボ特性に変更する。一方、ステップSt3において超えないと判定すると、ステップSt5において、サーボ特性の変更は行わない。なお、ステップSt2において、ブレーキ操作量Sの変化度合に代えて、またはブレーキ操作量Sの変化度合と共に、作動液圧Pの変化度合を演算し、この変化度合が閾値よりも大きいか否かを判定するようにしてもよい。
【0060】
このようにすれば、ブレーキペダル15踏み込み時に、助勢限界操作量S2を超える場合は無効操作量を減らすことができ、超えない場合はサーボ特性の変更は行わないので液圧制動力を増すことができる。
【0061】
以上の構成において、ストロークセンサ61に代え、ブレーキペダル15の踏力センサ71での踏力値、又は加圧シミュレータ31の圧力を検出する液圧センサ72での検出圧力値を用いてブレーキ操作量を求めるようにしてもよい。また、ストロークセンサ61で検出されたペダルストローク、踏力センサ71で検出された踏力値及び加圧シミュレータ31の液圧センサ72で検出された圧力値を任意に組み合わせてブレーキ操作量としても良い。
【符号の説明】
【0062】
11…シリンダ、11a…隔壁、12…入力ピストン、12a…閉塞面、13…第1出力ピストン、13a…棒状部分の端面、14…第2出力ピストン、15…ブレーキペダル、16…操作ロッド、17・・・軸穴、19…入力シリンダ穴、22…リザーバタンク、23…加圧シリンダ穴、24…第1圧縮スプリング、25…第2圧縮スプリング、28…反力液圧室、30…配管、32…第1圧力室、36…第2圧力室、37…減圧用リニア弁、38…増圧用リニア弁、39…液圧ポンプ、40…アキュムレータ、42,43,72…液圧センサ、45,46,47,48…液圧供給配管、51,52…吐出液圧配管、53…ABS、55FR,55FL,55RR,55RL…ホイールシリンダ、61…ストロークセンサ、62…ブレーキECU、63…メインECU63、71…踏力センサ。
【技術分野】
【0001】
本発明は、ブレーキ操作量に応じて車両に付与する制動力を制御する車両用制動制御装置に関し、特に、ドライバーがブレーキペダルを高減速度領域で踏み込んでも制動力が増加しない無効操作量を低減する車両用制動制御装置に関する。
【背景技術】
【0002】
従来、車両用制動制御装置として例えば特許文献1に記載の装置がある。この装置は、シリンダ内に入力ピストンと出力ピストンを摺動自在に嵌合すると共に、入力ピストンにより出力ピストンを押圧可能とし、電源が正常時には、入力ピストンに連結されているブレーキペダルの操作量に応じた作動液圧を出力ピストンに作用させることで、車輪を制動するホイールシリンダに制動液圧を供給している。一方、電源がダウンしたときは、ブレーキペダルから入力ピストンを介して直接出力ピストンを押動することによりブレーキペダルの操作量に応じた制動液圧を、出力ピストンからホイールシリンダに供給している。これにより適正に車輪に制動力を付与して安全性の向上を図っている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−62614号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、特許文献1の装置においては、図7に示すように、ブレーキ操作量SがS0からS2に増加する間、目標作動液圧液Ptはブレーキ操作量Sに対して実線Pt1に沿ったサーボ特性で増加している。ブレーキペダルが高減速度領域に踏み込まれブレーキ操作量がS2になると、目標作動液圧Ptは助勢限界作動液圧Ptmに到達するので、入力ピストンが出力ピストンに当接するまでの間は、ブレーキ操作量Sが増加しても作動液圧Pが増加しない無効操作量Bbとなる。入力ピストンが直接出力ピストンを押動するようになると作動液圧Pはドライバーの踏力に応じて増加する。
【0005】
ブレーキペダルが高減速度領域に踏み込まれた状態で、無効操作量Bbが長くなると、この間ブレーキ操作量Sが増加しても作動液圧P延いては車両の制動力が増加しないので、ドライバーが違和感を感じるという問題がある。
【0006】
本発明は、このような事情に鑑みてなされたものであり、ブレーキ操作量の増加時にホイールシリンダへの制動液圧が上昇しない無効操作量を極力減少させることでドライバーに違和感を感じさせないようにすることができる車両用制動制御装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するためになされた請求項1に係る発明の構成上の特徴は、ブレーキ操作部材に連動してシリンダ内を摺動する入力ピストンと、前記入力ピストンと分離され、前記ブレーキ操作部材の操作により前記入力ピストンに対し離間又は当接して、前記シリンダ内を摺動する出力ピストンとを有しているマスタシリンダと、前記マスタシリンダに形成された駆動液圧室に接続され、当該駆動液圧室内の液圧である駆動液圧を、所定の助勢限界液圧を超えない範囲で調整する駆動液圧調整装置とを備え、前記入力ピストンが前記出力ピストンに対し離間している状態では、前記出力ピストンが前記駆動液圧に駆動されて前記シリンダ内を摺動することで、前記マスタシリンダに形成されたマスタ液圧室内の液圧であるマスタ液圧が変化し、前記入力ピストンが前記出力ピストンに当接している状態では、前記入力ピストン及び前記出力ピストンが、前記ブレーキ操作部材に連動して前記シリンダ内を摺動することで、前記マスタ液圧が変化する車両用制動装置に適用され、前記駆動液圧が前記助勢限界液圧を超えていない場合に、当該出力ピストンが前記入力ピストンに対して離間するように、前記駆動液圧調整装置により前記駆動液圧を制御する車両用制動制御装置において、前記ブレーキ操作部材の操作量を検出するブレーキ操作量検出手段と、前記ブレーキ操作量検出手段により検出された前記ブレーキ操作部材の操作量であるブレーキ操作量が所定のサーボ特性変更操作量未満である場合には、前記ブレーキ操作量の増大量に対する前記駆動液圧の増大量が所定値である第1サーボ特性に基づいて、前記駆動液圧調整装置により前記駆動液圧を制御し、前記ブレーキ操作量が前記サーボ特性変更操作量以上である場合には、前記第1サーボ特性よりも前記ブレーキ操作量の増大量に対する前記駆動液圧の増大量が小さい第2サーボ特性に基づいて、前記駆動液圧調整装置により前記駆動液圧を制御する駆動液圧制御手段と、を備え、前記サーボ特性変更操作量は、仮に前記ブレーキ操作量にかかわらず前記第1サーボ特性に基づいて前記駆動液圧を前記ブレーキ操作量の増大に応じて増大させた場合に、当該駆動液圧が前記助勢限界液圧となる前記ブレーキ操作部材の操作量である助勢限界操作量よりも小さい操作量に設定されていることである。
【0008】
請求項2に係る発明の構成上の特徴は、前記助勢限界液圧から前記サーボ特性変更操作量における前記駆動液圧を減じて液圧差を算出し、前記入力ピストン及び前記出力ピストンが離間した状態から両ピストンが当接する時点の前記ブレーキ操作部材の操作量である当接ブレーキ操作量から前記サーボ特性変更操作量を減じて操作量差を算出し、前記液圧差を前記操作量差で除した値を、前記第2サーボ特性として設定する第2サーボ特性設定手段を備え、前記駆動液圧制御手段は、前記第2サーボ特性設定手段により設定された第2サーボ特性に基づいて、前記ブレーキ操作量が前記サーボ特性変更操作量以上である場合の前記駆動液圧制御を実施することである。
【0009】
請求項3に係る発明の構成上の特徴は、前記ブレーキ操作量と前記マスタ液圧との関係において、前記第1サーボ特性に基づく駆動液圧制御時の特性線と前記入力ピストンが前記出力ピストンに当接した状態における特性線との交点におけるブレーキ操作量を、前記サーボ特性変更操作量として設定するサーボ特性変更操作量設定手段を備え、前記駆動液圧制御手段は、前記サーボ特性変更操作量設定手段により設定されたサーボ特性変更操作量に基づいて、前記駆動液圧制御を実施することである。
【0010】
請求項4に係る発明の構成上の特徴は、前記マスタ液圧を検出するマスタ液圧検出手段と、前記マスタ液圧検出手段により検出されたマスタ液圧の前記ブレーキ操作量の増大量に対する増大量に基づいて、前記当接ブレーキ操作量を算出する当接ブレーキ操作量算出手段を備え、前記第2サーボ特性設定手段は、前記当接ブレーキ操作量算出手段により算出された当接ブレーキ操作量に基づいて前記第2サーボ特性を設定することである。
【0011】
請求項5に係る発明の構成上の特徴は、前記マスタ液圧を検出するマスタ液圧検出手段と、前記マスタ液圧検出手段により検出されたマスタ液圧に基づいて前記マスタ液圧室から送出されたブレーキ液の液量を算出し、当該液量を前記出力ピストンの断面積で除した値に所定値を足した値を、前記当接ブレーキ操作量として算出する当接ブレーキ操作量算出手段を備え、前記第2サーボ特性設定手段は、前記当接ブレーキ操作量算出手段により算出された当接ブレーキ操作量に基づいて前記第2サーボ特性を設定することである。
【0012】
請求項6に係る発明の構成上の特徴は、前記駆動液圧が前記助勢限界液圧に達するか否かを判定する駆動液圧変化判定手段を備え、前記駆動液圧制御手段は、前記駆動液圧変化判定手段により前記駆動液圧が前記助勢限界液圧に達することが判定されている場合に、前記第1サーボ特性から前記第2サーボ特性への変更を実施することである。
【発明の効果】
【0013】
本発明は、ブレーキ操作部材に連動してシリンダ内を摺動する入力ピストンと、入力ピストンと分離され、ブレーキ操作部材の操作により入力ピストンに対し離間又は当接して、シリンダ内を摺動する出力ピストンとを有しているマスタシリンダと、当該マスタシリンダに形成された駆動液圧室に接続され、同駆動液圧室内の液圧である駆動液圧を、所定の助勢限界液圧を超えない範囲で調整する駆動液圧調整装置とを備え、入力ピストンが出力ピストンに対し離間している状態では、出力ピストンが駆動液圧に駆動されてシリンダ内を摺動することで、マスタシリンダに形成されたマスタ液圧室内の液圧であるマスタ液圧が変化し、入力ピストンが出力ピストンに当接している状態では、入力ピストン及び出力ピストンが、ブレーキ操作部材に連動してシリンダ内を摺動することで、マスタ液圧が変化する車両用制動装置に適用され、駆動液圧が助勢限界液圧を超えていない場合に、当該出力ピストンが入力ピストンに対して離間するように、駆動液圧調整装置により駆動液圧を制御する車両用制動制御装置である。
【0014】
上述の車両用制動装置に上述の車両用制動制御装置を適用した場合、駆動液圧が助勢限界液圧に達した後のブレーキ操作部材の操作量の増大に伴って、同ブレーキ操作部材に連動する入力ピストンが、駆動液圧に駆動される出力ピストンに近接し、ひいては出力ピストンに当接する。入力ピストンが出力ピストンに当接した後は、入力ピストン及び出力ピストンがブレーキ操作部材に連動し、マスタ液圧が増大するものの、駆動液圧が助勢限界液圧に達してから入力ピストンが出力ピストンに当接するまでの間は、ブレーキ操作部材の操作量がとしても出力ピストンがシリンダ内を摺動せず、マスタ液圧が変化しないことが考えられる。その結果、ブレーキ操作部材の操作量を増大させているにもかからず、制動力が増大しないという違和感をドライバーに与えることが懸念される。
【0015】
これに対して、請求項1に記載の発明では、ブレーキ操作部材の操作量が所定のサーボ特性変更操作量未満である場合には、ブレーキ操作部材の操作量の増大量に対する駆動液圧の増大量が所定値である第1サーボ特性に基づいて、駆動液圧調整装置により駆動液圧を制御し、ブレーキ操作量がサーボ特性変更操作量以上である場合には、第1サーボ特性よりもブレーキ操作量の増大量に対する駆動液圧の増大量が小さい第2サーボ特性に基づいて、駆動液圧調整装置により駆動液圧を制御するようにしている。ここで、上記サーボ特性変更操作量は、仮にブレーキ操作量にかかわらず第1サーボ特性に基づいて駆動液圧をブレーキ操作量の増大に応じて増大させた場合に、当該駆動液圧が助勢限界液圧となるブレーキ操作部材の操作量である助勢限界操作量よりも小さい操作量に設定されている。
【0016】
そのため、ブレーキ操作部材の操作量にかかわらず第1サーボ特性に基づいて駆動液圧をブレーキ操作部材の操作量の増大に応じて増大させた場合よりも、駆動液圧が助勢限界液圧に達するブレーキ操作部材の操作量が大きくなり、駆動液圧が助勢限界液圧に達してから入力ピストンが出力ピストンに当接するまでのブレーキ操作部材の操作量が小さくなる。これにより、上記ブレーキ操作部材の操作量を増大させているにもかからず、制動力が増大しないという違和感を軽減することができる。
【0017】
請求項2に記載の発明では、第2サーボ特性設定手段によって、助勢限界液圧からサーボ特性変更操作量における駆動液圧を減じて液圧差を算出し、入力ピストン及び出力ピストンが離間した状態から両ピストンが当接する時点のブレーキ操作部材の操作量である当接ブレーキ操作量からサーボ特性変更操作量を減じて操作量差を算出し、液圧差を操作量差で除した値を、第2サーボ特性として設定する。駆動液圧制御手段は、第2サーボ特性設定手段により設定された第2サーボ特性に基づいて、ブレーキ操作量がサーボ特性変更操作量以上である場合の駆動液圧制御を実施するので、ブレーキ操作量が助勢限界液圧に到達する位置を、無効操作量が小さくなるように適切に設定することができる。
【0018】
請求項3に記載の発明では、サーボ特性変更操作量設定手段によって、ブレーキ操作量とマスタ液圧との関係において、第1サーボ特性に基づく駆動液圧制御時の特性線と入力ピストンが出力ピストンに当接した状態における特性線との交点におけるブレーキ操作量を、サーボ特性変更操作量として設定する。駆動液圧制御手段は、サーボ特性変更操作量設定手段により設定されたサーボ特性変更操作量に基づいて、駆動液圧制御を実施するので、ブレーキ操作量が助勢限界液圧に到達する位置を、無効操作量が略無くなるように適切に設定することができる。
【0019】
請求項4に記載の発明では、当接ブレーキ操作量算出手段によって、マスタ液圧検出手段により検出されたマスタ液圧のブレーキ操作量の増大量に対する増大量に基づいて、当接ブレーキ操作量を算出する。そして、第2サーボ特性設定手段が、当接ブレーキ操作量算出手段により算出された当接ブレーキ操作量に基づいて第2サーボ特性を設定する。従って、その第2サーボ特性に基づいて、当接ブレーキ操作量が助勢限界液圧に到達する位置を適切に設定することができる。
【0020】
請求項5に記載の発明では、当接ブレーキ操作量算出手段によって、マスタ液圧検出手段により検出されたマスタ液圧に基づいてマスタ液圧室から送出されたブレーキ液の液量を算出し、当該液量を出力ピストンの断面積で除した値に所定値を足した値を、当接ブレーキ操作量として算出する。そして、第2サーボ特性設定手段が、当接ブレーキ操作量算出手段により算出された当接ブレーキ操作量に基づいて第2サーボ特性を設定する。従って、第2サーボ特性に基づいて、当接ブレーキ操作量が助勢限界液圧に到達する位置を適切に設定することができる。
【0021】
請求項6に係る発明によれば、駆動液圧変化判定手段によって駆動液圧が助勢限界液圧に達するか否かを判定する。駆動液圧制御手段が、駆動液圧変化判定手段により駆動液圧が助勢限界液圧に達することが判定されている場合に、第1サーボ特性から第2サーボ特性への変更を実施するので、第1サーボ特性から第2サーボ特性への変更を適正に行って、駆動液圧が助勢限界液圧に達してから入力ピストンが出力ピストンに当接するまでのブレーキ操作部材の操作量を小さくすることができる。
【図面の簡単な説明】
【0022】
【図1】本実施形態の車両用制動制御装置の構成を示す図である。
【図2】本実施形態の車両用制動制御装置におけるブレーキ操作量と目標制動力との関係を示すブレーキ操作量‐目標制動力マップである。
【図3】作動液圧と液圧制動力との関係を示す作動液圧−液圧制動力マップである。
【図4】出力ピストンに作用する作動液圧が各作動液圧になるまでにシリンダから送出された液量を示す作動液圧‐液量グラフである。
【図5】作動液圧−液圧制動力マップの変形例を示す図である。
【図6】ブレーキ操作量が助勢限界操作量を超さないと判定した場合に、設定サーボ特性から無効操作量低減サーボ特性に変更しないようにするフローチャートである。
【図7】従来のブレーキ操作量と制動力との関係において無効操作量を示す図である。
【発明を実施するための形態】
【0023】
本発明の実施形態の車両用制動制御装置は、例えばハイブリッド車に搭載されており、図1に示すように、基端部が開口して先端部が閉塞した円筒形状を成すシリンダ11を備え、このシリンダ11の内部に基端部から順に入力ピストン12、第1及び第2出力ピストン13,14が各々同軸上に配置されて軸方向に沿って摺動自在に嵌合されている。入力ピストン12は、シリンダ11の基端部外方に一部が突出して配置され、その突出部分にブレーキペダル15の操作ロッド16がピボット16aを用いて連結され、ドライバーによるブレーキペダル15の操作により操作ロッド16を介して移動可能となっている。なお、ブレーキペダル15の移動量をブレーキ操作量とも言う。
【0024】
入力ピストン12は、シリンダ11の基端部側に形成された入力シリンダ穴19に摺動自在に嵌合されている。入力ピストン12には、入力シリンダ穴19内への挿入部分に、先端側が開口し基端部側が閉塞されて閉塞面12aとなった軸穴17が形成されている。この軸穴17に、第1出力ピストン13からシリンダ11の隔壁11aを貫通して基端部側へ延在する円柱状の棒状部分が摺動自在に嵌合されている。この嵌合された棒状部分の端面13aは、入力ピストン12の閉塞面12aと平行状態となっており、それら端面13aと閉塞面12aとの間には、ブレーキペダル15が無操作状態の際に所定距離Bの間隔が確保されるようになっている。
【0025】
入力ピストン12の先端部側の端面と隔壁11aとの間には反力液圧室28が形成され、この反力液圧室28の隔壁11aの近傍にはシリンダ11の周壁を外部に貫通するポート29が形成されている。このポート29は配管30を介して加圧シミュレータ31に接続されている。
【0026】
加圧シミュレータ31は、シリンダ311にピストン312が摺動可能に嵌合され、圧縮スプリング313によって前方に付勢されたピストン312の前面側に液室314が形成され、液室314が配管30を介して反力液圧室28に連通されている。ブレーキペダル15の操作により入力ピストン12が前方に移動されると、反力液圧室28から作動液が液室314に送出されピストン312が圧縮スプリング313の撓み量に比例するばね力に抗して後退される。これにより、反力液圧室28内の圧力がブレーキペダル15の移動量であるブレーキ操作量に応じて上昇し、ブレーキペダル15にはブレーキ操作量に応じた反力が付与される。なお、配管30に反力液圧室28内の圧力を検出する圧力センサ72を設けてもよい。
【0027】
入力ピストン12の軸穴17の内周面と第1出力ピストン13の棒状部分の外周面との間に軸方向に沿って所定ギャップの通路17aが形成されるように、軸穴17は軸線方向に所定長さだけ大径に形成されている。入力ピストン12の周壁には当該周壁を貫通する貫通穴18が通路17aと連通するように形成されている。更に、入力ピストン12の外周面と入力シリンダ穴19の内周面との間に軸方向に沿って所定ギャップの通路19aが形成されるように入力シリンダ穴19は軸線方向に所定長さだけ大径に形成されている。シリンダ11の周壁には断面がクランク形状の通路20が、通路19aの先端付近で連通するように貫通して形成されている。通路20は配管21で、作動液のリザーバタンク22に連通されている。
【0028】
従って、端面13aと閉塞面12aとの間隔部分17bは、通路17a、貫通穴18、通路19a、通路20、配管21を介してリザーバタンク22に連通している。この連通状態は、ブレーキ操作量に係わらず保持され、間隔部分17bは、常時大気に連通されている。
【0029】
シリンダ11には、加圧シリンダ穴23が入力シリンダ穴19と隔壁11aを挟んで形成されている。第1出力ピストン13は、断面コ字形状を呈し、加圧シリンダ穴23に摺動自在に嵌合されている。第1出力ピストン13の先端部側に配置された第2出力ピストン14は断面がコ字形状を呈し、加圧シリンダ穴23内に摺動自在に嵌合されている。
【0030】
隔壁11aと第1出力ピストン13との間に作動液圧室27が形成され、第1出力ピストン13と第2出力ピストン14との間に第1圧力室32が形成され、第2出力ピストン14と加圧シリンダ穴23の先端閉塞面との間に第2圧力室36が形成されている。第1出力ピストン13のコ字形状の凹部底面と第2出力ピストン14の後端面との間に第1圧縮スプリング24が介在され、第2出力ピストン14のコ字形状の凹部底面と加圧シリンダ穴23の先端閉塞面との間に第2圧縮スプリング25が介在されている。これにより、ブレーキペダル15が無操作状態において、第1および第2出力ピストン13、14は第1および第2圧縮スプリング24、25のばね力によってシリンダ11の基端側に付勢され、所定の各不作動位置にそれぞれ停止されている。
【0031】
ブレーキペダル15の無操作状態において、第1出力ピストン13の棒状部分の端面13aは、入力ピストン12の閉塞面12aとの間に、上述した所定距離Bとなる間隔をもって離間状態に保持されている。ドライバーがブレーキペダル15を操作し、入力ピストン12が第1出力ピストン13に対して所定距離Bだけ相対的に前進すると、第1出力ピストン13に当接してこれを押圧可能となっている。
【0032】
作動液圧室27の隔壁11aの近傍にはシリンダ11の周壁を外部に貫通するポート33が形成されている。第1出力ピストン13と第2出力ピストン14との間の第1圧力室32には所定の不作動位置に位置する第2出力ピストン14の後端面近傍にシリンダ11の周壁を外部に貫通するポート34が形成されている。更に、第2出力ピストン14の先端部側とシリンダ11の先端閉塞面との間の第2圧力室36には当該先端閉塞面の近傍に、シリンダ11の周壁を外部に貫通するポート35が形成されている。
【0033】
作動液圧室27のポート33とリザーバタンク22との間には、減圧用リニア弁37、増圧用リニア弁38、液圧ポンプ39、アキュムレータ(Acc)40が液圧供給配管(単に配管ともいう)45,45a,46,46a,47,48で接続されている。即ち、ポート33は配管45に連結され、この配管45の先端には増圧用リニア弁38の出口が連結され、この増圧用リニア弁38の入口は配管46で液圧ポンプ39の吐出口に連結され、液圧ポンプ39の吸入口は配管47でリザーバタンク22に連結されている。液圧ポンプ39には、液圧ポンプ駆動用のモータ41が連結されている。液圧ポンプ39と増圧用リニア弁38とを連結する配管46の途中は分岐しており、この分岐配管46aにアキュムレータ40が連結されている。ポート33と増圧用リニア弁38とを連結する配管45の途中は分岐しており、この分岐配管45aに減圧用リニア弁37の入口が連結され、この減圧用リニア弁37の出口は配管48でリザーバタンク22に連結されている。
【0034】
アキュムレータ40の流出入口に接続された配管46aには、アキュムレータ40に蓄圧された圧力エネルギー(アキュムレータ圧)を検出する圧力センサ42が設けられている。作動液圧室27のポート33に連結された配管45には、作動液圧室27内の液圧を検出する圧力センサ43が設けられている。
【0035】
アキュムレータ40は、液圧ポンプ39により発生した液圧を蓄圧するものであり、この蓄圧された液圧が増圧用リニア弁38を介して作動液圧室27へ供給されることによりブレーキ力(制動力)が得られるようになっている。アキュムレータ圧が所定値以下に低下したことが圧力センサ42によって検出されると液圧ポンプ39は、モータ41によって駆動され、アキュムレータ40に作動液を供給してアキュムレータ40に蓄圧された圧力エネルギーを補給する。また、アキュムレータ40は、液圧ポンプ39が吐出した作動液(ブレーキ油)の脈動を緩和するために液圧ポンプ39の上流側に配置されている。
【0036】
増圧用リニア弁38及び減圧用リニア弁37は、流量調整式の電磁弁であり、作動液圧室27の液圧を高くする場合は、増圧用リニア弁38の絞り抵抗が減少され、減圧用リニア弁37の絞り抵抗が増加されるようになっている。この逆に、作動液圧室27の液圧を低くする場合、増圧用リニア弁38の絞り抵抗が増加され、減圧用リニア弁37の絞り抵抗が減少されるようになっている。増圧用リニア弁38の絞り抵抗を最小とし、減圧用リニア弁37を閉止すると、作動液圧室27に助勢限界液圧Pmが発生する。増圧用リニア弁38を閉止し、減圧用リニア弁37の絞り抵抗を最小にすると作動液圧室27の液圧は無くなる。作動液圧室27に助勢限界液圧Pmを発生させたときに車輪FR〜RLに助勢限界液圧制動力Fpmが付与される。
【0037】
第1圧力室32のポート34及び第2圧力室36のポート35には、各々吐出液圧配管51,52を介してABS(AntilockBrakeSystem)53が連結され、このABS53に、前輪FR,FL及び後輪RR,RL(以降、車輪FR〜RLとも表現する)を制動するブレーキ装置(図示略)を作動させるホイールシリンダ55FR,55FL,55RR,55RL(以降、ホイールシリンダ55FR〜55RLとも表現する)が連結されている。つまり、アキュムレータ40から送出された液圧が増圧用リニア弁38および減圧用リニア弁37によって制御された作動液圧Pが作動液圧室27に発生することにより第1ピストン13延いては第2出力ピストン14が前進して第1及び第2圧力室32,36が加圧される。第1及び第2圧力室32,36の液圧はポート34,35から吐出液圧配管51,52及びABS53を経由してホイールシリンダ55FR〜55RLへ制動液圧として供給され、これによって車輪FR〜RL延いては車両に液圧制動力が付与される。
【0038】
入力シリンダ穴19の内周面と入力ピストン12の外周面との間、加圧シリンダ穴23と第1出力ピストン13及び第2出力ピストン14の外周面との間、並びに、入力ピストン12の軸穴17の内周面及び隔壁11aと第1出力ピストン13の棒状部分の外周面との間には、図1に丸印で示すOリング等のシール部材を装着し、液の漏洩を防止している。
【0039】
このような構成の車両用制動制御装置は、更に、制御手段としてのブレーキECU(電子制御ユニット)62を備え、このブレーキECU62は、ブレーキペダル15に設けられたストロークセンサ61、増圧用リニア弁38、減圧用リニア弁37、圧力センサ42,43、モータ41と電気的に接続されており、更にブレーキECU62の上位制御を行うメインECU63に接続されている。ストロークセンサ61は、ブレーキペダル15のペダルストロークを検出してブレーキECU62へ出力し、ブレーキECU62は、そのペダルストロークからブレーキ操作量Sを求める。
【0040】
ブレーキECU62は、ストロークセンサ61で検出されたブレーキ操作量Sに応じた目標制動力Ftをブレーキ操作量‐目標制動力マップから求め、ブレーキECU62は、その目標制動力Ftを目標回生制動力Frtと目標液圧制動力Fptとに配分する。この目標液圧制動力Fptに応じてブレーキECU62は液圧ブレーキ(液圧制動力)を車輪FR〜RLに付与する。また、目標回生制動力Fptに応じて図略のモータECUが回生ブレーキ(回生制動力)を駆動輪に付与する。即ち、モータECUは、目標回生制動力Frtに応じて図略の電気モータを駆動輪の回転による発電機として作動させることで、回生ブレーキを駆動輪に付与して車両を減速しつつ、運動(回転)エネルギーを電気エネルギーに変換し、この電気エネルギーを図略のインバータを介してバッテリに回収する。
【0041】
ここで、ブレーキ操作が行われ、且つ回生制動が可能で目標回生制動力が0より大きい場合は、車輪に液圧制動力と回生制動力とが付与される回生協調制御が実行される。このとき目標液圧制動力Fptと目標回生制動力Frtとを加算した目標制動力Ftはブレーキ操作量Sに応じて設定される。このブレーキ操作量Sと目標制動力との関係を示すブレーキ操作量‐目標制動力マップの一例を図2に示す。バッテリの充電状況等により回生制動が行えないときにも必要な制動力を確保するためには、ブレーキ操作量に対する目標制動力は、まず液圧制動力で確保できるようにしておく必要がある。従って、ブレーキ操作量‐目標制動力マップは、回生制動力が0であるときのブレーキ操作量Sに対する目標液圧制動力を示すものでもある。
【0042】
本実施の形態におけるブレーキ操作量‐目標制動力マップでは、図2に示すように、ブレーキ操作量Sが、ブレーキペダル15の遊びが詰まった時点でのブレーキ操作量S0から助勢限界操作量S2より小さい所定のサーボ特性変更操作量S2xに達するまでの間は、目標制動力Ftはブレーキ操作量Sに対して実線Ft1で示す所望の傾きの設定サーボ特性で増加している。助勢限界操作量S2は、設定サーボ特性において目標制動力Ftが助勢限界液圧制動力Fpmとなるときの操作量である。
【0043】
ブレーキ操作量Sがサーボ特性変更操作量S2xを超えて当接ブレーキ操作量S3または当接ブレーキ操作量S3より小さい所定のブレーキ操作量S3xになるまでの間は、ブレーキ操作量Sに対して目標制動力Ftを無効操作量低減サーボ特性で増加させている。無効操作量低減サーボ特性は、助勢限界液圧制動力Fpmから、設定サーボ特性においてサーボ特性変更操作量S2xでの目標制動力Ftを減算した値を、当接ブレーキ操作量S3または当接ブレーキ操作量S3より小さい所定のブレーキ操作量S3xからサーボ特性変更ブレーキ操作量F2xを減算した値で除算して求める。このようにして求めた無効操作量低減サーボ特性は、設定サーボ特性よりもブレーキ操作量Sの増加に対する液圧制動力Fpの増加割合が小さい。
【0044】
その後、入力ピストン12が出力ピストン13当接するまでの間の余裕間隔Bbを無効操作量とし、ブレーキ操作量Sが当接ブレーキ操作量S3を超えると、目標制動力Ftはドライバーの踏力に応じて増加するように設定されている。
【0045】
このブレーキ操作量Sに対する目標制動力Ftは、ブレーキECUのメモリにブレーキ操作量‐目標制動力マップとして記憶されている。回生制動が可能な回生協調制御時には、ブレーキECU62は各ブレーキ操作量Sにおいて目標回生制動力Frtを回生制動の可能な範囲で決定し、目標制動力Ftから目標回生制動力Frtを減算して目標液圧制動力Fptを決定する。
【0046】
ブレーキECU62は、目標液圧制動力Fptに基づいて増圧用リニア弁38および減圧用リニア弁37を作動させ、作動液圧室27に目標液圧制動力Fptに対応する作動液圧Pを発生させ、ホイールシリンダ55FR〜55RLに制動液圧Pを供給して車輪FR〜RLに目標液圧制動力Fptを付与する。図略のモータECUは、駆動輪に連結された電気モータを目標回生制動力Frtに基づいて発電機として作動させ、駆動輪に目標回生制動力Frtを付与する。
【0047】
回生協調制御が行われる場合、ブレーキペダル15の踏み込み時に、ブレーキ操作量がS0からS1になるまでの間は、目標液圧制動力は0であり、作動液圧室27に作動液圧Pが発生されず、回生制動のみが行われて目標回生制動力Frtがブレーキ操作量Sに応じて駆動輪に付与される。ストロークセンサ61で検出されたブレーキ操作量Sが、そのときの目標制動力Ftが最大回生制動力Frmと等しくなるときのブレーキ操作量S1を超えた後は、最大回生制動力Frmに加え、目標制動力Ftから最大回生制動力Frmを減算した目標液圧制動力Fptに対応する作動液圧Ptが作動液圧室27に発生され、車輪に目標制動力Ftが付与される。作動液圧室27に発生した作動液圧Pと車輪FR〜RLに付与される液圧制動力Fpとの関係は、別途試験等で求められ、図3に示す作動液圧‐液圧制動力マップ70としてブレーキECU62のメモリに記憶されている。
【0048】
ブレーキペダル15の無操作状態では、第1出力ピストン13の棒状部分の端面13aと入力ピストン12の閉塞面12aとの間隔は所定距離Bに保持されているが、作動液圧室27の液圧が助勢限界液圧Pmに達するとした後のブレーキペダル15の操作量の増大に伴って入力ピストン12が前進することにより、入力ピストン12が第1出力ピストン13に接近し、端面13aと閉塞面12aとの間隔は減少する。
【0049】
目標制動力Ftが助勢限界液圧制動力Fpmとなったときに端面13aと閉塞面12aとが当接するようにすると、ブレーキ操作量が増加しているにも拘らず制動力が増加しないブレーキペダル15の無効操作量を無くすことができる。しかし、目標制動力Ftが助勢限界液圧制動力Fpmとなったときに端面13aと閉塞面12aとが当接するようにすることは製作誤差や部品の弾性変形等から容易ではない。また、ブレーキ操作量に応じて液圧制動力を自由に設定するためには、目標制動力Ftが助勢限界液圧制動力Fptになったときに端面13aと閉塞面12aとの間に余裕間隔Bbを残しておくのが望ましい。
【0050】
本実施の形態によれば、ブレーキ操作量Sがサーボ特性変更操作量S2xを超えて当接ブレーキ操作量S3または当接ブレーキ操作量S3より小さい所定のブレーキ操作量S3xになるまでの間においても、ブレーキ操作量Sに対して目標制動力Ftを無効操作量低減サーボ特性に基づいて増加させることができるので、ブレーキ操作量Sが無効操作量低減サーボ特性において前述の所定のブレーキ操作量S3xに達した後に、ドライバーがブレーキペダル15を踏んでも制動力が上昇しない無効操作量Bbを小さくすることができ、ドライバーが違和感を感じることを防止できる。
【0051】
このように、目標制動力Ftとしての液圧制動力Fpのサーボ特性を、ブレーキ操作量がS0からS2に増加する間は、実線Ft1で示す設定サーボ特性で増加させている。ブレーキ操作量Sが、設定サーボ特性における助勢限界ブレーキ操作量S2より小さい所定のサーボ特性変更ブレーキ操作量S2xになると、サーボ特性を無効操作量低減サーボ特性に変更することにより、液圧制動力Fpが助勢限界液圧制動力Fpmになるときの助勢限界ブレーキ操作量S3xが当接ブレーキ操作位置S3に近づく。つまり、設定サーボ特性を無効操作量低減サーボ特性に変更しない状態で液圧制動力Fpが助勢限界液圧制動力Fpmになるときの助勢限界ブレーキ操作量S2よりも、変更後の無効操作量低減サーボ特性において液圧制動力Fpが助勢限界液圧制動力Fpmになるときの所定のブレーキ操作量S3xの方が当接ブレーキ操作位置S3に近くなるので、無効操作量低減サーボ特性に変更したときの無効操作量Bbが、変更しないときの無効操作量Bよりも小さくなる。
【0052】
このように、ブレーキ操作量の増加時に目標制動力が増加せず、ホイールシリンダ55FR〜55RLに供給される制動液圧が上昇しない無効操作量が減少するので、ドライバーに違和感を感じさせないようにすることができる。
【0053】
無効操作量低減サーボ特性の変形例として、無効操作量低減サーボ特性を、入力ピストン12が出力ピストン13に当接した後のブレーキ操作量Sの増加に対する液圧制動力の増加割合とし、図5において、当接ブレーキ操作量S3と助勢限界液圧制動力Fpmとに対応する座標点を通る無効操作量低減サーボ特性に相当する直線と設定サーボ特性に相当する直線との交点におけるサーボ操作量Sをサーボ特性変更操作量S2xとしてもよい。これによれば、無効操作量Bbを小さくすると共に、入力ピストン12が出力ピストン13に当接する前後の制動力の変化割合を等しくしてフィーリングを向上することができる。
【0054】
次に、無効操作量低減サーボ特性の設定の仕方について説明する。まず当接ブレーキ操作量S3を推定する。作動液圧室27に発生された制御圧力Pに対して吐出液圧配管34、35から送出された液量Qが実測され、図4に示す作動液圧‐液量グラフが作成されている。作動液圧室27に助勢限界液圧Pmが発生されたときに吐出液圧配管34、35から送出される液量Qmが図4の作動液圧‐液量グラフから読み取られ、液量Qmが第1、第2出力ピストン13,14の断面積で除算され、作動液圧室27に助勢限界液圧Pmが発生されたときの第1出力ピストン13の移動量が推定され、この第1出力ピストン13の移動量に、ブレーキペダル15が無操作状態のときの第1出力ピストン13の端面13aと入力ピストン12の閉塞面12aとの間隔の距離Bが加算されて当接ブレーキ操作量S3が推定される。これによれば、当接ブレーキ操作量S3を容易に推定することができる。
【0055】
また、第1圧力室32内又は第2圧力室36内の液圧を検出する液圧センサを備えて、当接ブレーキ操作量S3を、検出された各ブレーキ操作量において検出された出力ピストン13に作用する作動液圧Pの変化に基づいて推定してもよい。即ち、ブレーキ操作量Sをストロークセンサ61によって検出しつつ、検出された各ブレーキ操作量Sにおいて第1圧力室32内又は第2圧力室36内の液圧を上記液圧センサで検出し、その液圧変化しない状態から増加を開始したときのブレーキ操作量を当接ブレーキ操作量S3としてもよい。これによれば、当接ブレーキ操作量S3を正確に推定することができる。
【0056】
助勢限界液圧制動力Fpmは、増圧用リニア弁38を絞り抵抗が最小となるように制御し、減圧用リニア弁37を閉止状態に制御したときに、作動液圧室27に発生し液圧センサ43により検出された助勢限界作動液圧Pmに基づいて図3に示す作動液圧‐液圧制動力マップ70から演算する。
【0057】
無効操作量低減サーボ特性は、助勢限界液圧制動力Fpmから設定サーボ特性におけるサーボ特性変更ブレーキ操作量S2xでの目標制動力Ftyを減算した値(Fpm−Fty)を、当接ブレーキ操作量S3または当接ブレーキ操作量S3より小さい所定のブレーキ操作量S3xからサーボ特性変更ブレーキ操作量S2xを減算した値(S3−S2x)または(S3x−S2x)で除算して求められる。これによれば、目標制動力Ftが助勢限界液圧制動力Fpmになるときのブレーキ操作量Sを当接ブレーキ操作量S3に近づけて、無効操作量Bbが小さくなるように適切に設定することができる。
【0058】
更には、ブレーキ操作量Sが、サーボ特性変更操作量S2xに達するまでのブレーキ操作量Sの変化度合等に基づいて、ブレーキ操作量Sが助勢限界操作量S2を超えるか否か判定し、超えると判定した場合、サーボ特性変更操作量S2xでサーボ特性を設定サーボ特性から無効操作量低減サーボ特性に変更し、超えないと判定した場合、サーボ特性を変更しないようにしてもよい。
【0059】
これは、ブレーキECU62は、図6のステップSt1において、ブレーキ操作量Sがサーボ特性変更操作量S2x未満か否かを判定する。この結果、サーボ特性変更操作量S2x未満であれば、ステップSt2において、例えばブレーキ操作量Sの変化度合を演算し、この変化度合が閾値よりも大きいか否かを判定する。閾値より大きければ、ステップSt3において、ブレーキ操作量Sが助勢限界操作量S2を超えると判定し、ステップSt4において、ブレーキ操作量Sがサーボ特性変更操作量S2xに達するとサーボ特性を設定サーボ特性から無効操作量低減サーボ特性に変更する。一方、ステップSt3において超えないと判定すると、ステップSt5において、サーボ特性の変更は行わない。なお、ステップSt2において、ブレーキ操作量Sの変化度合に代えて、またはブレーキ操作量Sの変化度合と共に、作動液圧Pの変化度合を演算し、この変化度合が閾値よりも大きいか否かを判定するようにしてもよい。
【0060】
このようにすれば、ブレーキペダル15踏み込み時に、助勢限界操作量S2を超える場合は無効操作量を減らすことができ、超えない場合はサーボ特性の変更は行わないので液圧制動力を増すことができる。
【0061】
以上の構成において、ストロークセンサ61に代え、ブレーキペダル15の踏力センサ71での踏力値、又は加圧シミュレータ31の圧力を検出する液圧センサ72での検出圧力値を用いてブレーキ操作量を求めるようにしてもよい。また、ストロークセンサ61で検出されたペダルストローク、踏力センサ71で検出された踏力値及び加圧シミュレータ31の液圧センサ72で検出された圧力値を任意に組み合わせてブレーキ操作量としても良い。
【符号の説明】
【0062】
11…シリンダ、11a…隔壁、12…入力ピストン、12a…閉塞面、13…第1出力ピストン、13a…棒状部分の端面、14…第2出力ピストン、15…ブレーキペダル、16…操作ロッド、17・・・軸穴、19…入力シリンダ穴、22…リザーバタンク、23…加圧シリンダ穴、24…第1圧縮スプリング、25…第2圧縮スプリング、28…反力液圧室、30…配管、32…第1圧力室、36…第2圧力室、37…減圧用リニア弁、38…増圧用リニア弁、39…液圧ポンプ、40…アキュムレータ、42,43,72…液圧センサ、45,46,47,48…液圧供給配管、51,52…吐出液圧配管、53…ABS、55FR,55FL,55RR,55RL…ホイールシリンダ、61…ストロークセンサ、62…ブレーキECU、63…メインECU63、71…踏力センサ。
【特許請求の範囲】
【請求項1】
ブレーキ操作部材に連動してシリンダ内を摺動する入力ピストンと、前記入力ピストンと分離され、前記ブレーキ操作部材の操作により前記入力ピストンに対し離間又は当接して、前記シリンダ内を摺動する出力ピストンとを有しているマスタシリンダと、
前記マスタシリンダに形成された駆動液圧室に接続され、当該駆動液圧室内の液圧である駆動液圧を、所定の助勢限界液圧を超えない範囲で調整する駆動液圧調整装置とを備え、
前記入力ピストンが前記出力ピストンに対し離間している状態では、前記出力ピストンが前記駆動液圧に駆動されて前記シリンダ内を摺動することで、前記マスタシリンダに形成されたマスタ液圧室内の液圧であるマスタ液圧が変化し、前記入力ピストンが前記出力ピストンに当接している状態では、前記入力ピストン及び前記出力ピストンが、前記ブレーキ操作部材に連動して前記シリンダ内を摺動することで、前記マスタ液圧が変化する車両用制動装置に適用され、
前記駆動液圧が前記助勢限界液圧を超えていない場合に、当該出力ピストンが前記入力ピストンに対して離間するように、前記駆動液圧調整装置により前記駆動液圧を制御する車両用制動制御装置において、
前記ブレーキ操作部材の操作量を検出するブレーキ操作量検出手段と、
前記ブレーキ操作量検出手段により検出された前記ブレーキ操作部材の操作量であるブレーキ操作量が所定のサーボ特性変更操作量未満である場合には、前記ブレーキ操作量の増大量に対する前記駆動液圧の増大量が所定値である第1サーボ特性に基づいて、前記駆動液圧調整装置により前記駆動液圧を制御し、前記ブレーキ操作量が前記サーボ特性変更操作量以上である場合には、前記第1サーボ特性よりも前記ブレーキ操作量の増大量に対する前記駆動液圧の増大量が小さい第2サーボ特性に基づいて、前記駆動液圧調整装置により前記駆動液圧を制御する駆動液圧制御手段と、を備え、
前記サーボ特性変更操作量は、仮に前記ブレーキ操作量にかかわらず前記第1サーボ特性に基づいて前記駆動液圧を前記ブレーキ操作量の増大に応じて増大させた場合に、当該駆動液圧が前記助勢限界液圧となる前記ブレーキ操作部材の操作量である助勢限界操作量よりも小さい操作量に設定されていることを特徴とする車両用制動制御装置。
【請求項2】
前記助勢限界液圧から前記サーボ特性変更操作量における前記駆動液圧を減じて液圧差を算出し、前記入力ピストン及び前記出力ピストンが離間した状態から両ピストンが当接する時点の前記ブレーキ操作部材の操作量である当接ブレーキ操作量から前記サーボ特性変更操作量を減じて操作量差を算出し、前記液圧差を前記操作量差で除した値を、前記第2サーボ特性として設定する第2サーボ特性設定手段を備え、
前記駆動液圧制御手段は、前記第2サーボ特性設定手段により設定された第2サーボ特性に基づいて、前記ブレーキ操作量が前記サーボ特性変更操作量以上である場合の前記駆動液圧制御を実施する請求項1に記載の車両用制動制御装置。
【請求項3】
前記ブレーキ操作量と前記マスタ液圧との関係において、前記第1サーボ特性に基づく駆動液圧制御時の特性線と前記入力ピストンが前記出力ピストンに当接した状態における特性線との交点におけるブレーキ操作量を、前記サーボ特性変更操作量として設定するサーボ特性変更操作量設定手段を備え、
前記駆動液圧制御手段は、前記サーボ特性変更操作量設定手段により設定されたサーボ特性変更操作量に基づいて、前記駆動液圧制御を実施する請求項2に記載の車両用制動制御装置。
【請求項4】
前記マスタ液圧を検出するマスタ液圧検出手段と、
前記マスタ液圧検出手段により検出されたマスタ液圧の前記ブレーキ操作量の増大量に対する増大量に基づいて、前記当接ブレーキ操作量を算出する当接ブレーキ操作量算出手段を備え、
前記第2サーボ特性設定手段は、前記当接ブレーキ操作量算出手段により算出された当接ブレーキ操作量に基づいて前記第2サーボ特性を設定する請求項2又は3に記載の車両用制動制御装置。
【請求項5】
前記マスタ液圧を検出するマスタ液圧検出手段と、
前記マスタ液圧検出手段により検出されたマスタ液圧に基づいて前記マスタ液圧室から送出されたブレーキ液の液量を算出し、当該液量を前記出力ピストンの断面積で除した値に所定値を足した値を、前記当接ブレーキ操作量として算出する当接ブレーキ操作量算出手段を備え、
前記第2サーボ特性設定手段は、前記当接ブレーキ操作量算出手段により算出された当接ブレーキ操作量に基づいて前記第2サーボ特性を設定する請求項2又は3に記載の車両用制動制御装置。
【請求項6】
前記駆動液圧が前記助勢限界液圧に達するか否かを判定する駆動液圧変化判定手段を備え、
前記駆動液圧制御手段は、前記駆動液圧変化判定手段により前記駆動液圧が前記助勢限界液圧に達することが判定されている場合に、前記第1サーボ特性から前記第2サーボ特性への変更を実施する請求項1〜5のいずれか1項に記載の車両用制動制御装置。
【請求項1】
ブレーキ操作部材に連動してシリンダ内を摺動する入力ピストンと、前記入力ピストンと分離され、前記ブレーキ操作部材の操作により前記入力ピストンに対し離間又は当接して、前記シリンダ内を摺動する出力ピストンとを有しているマスタシリンダと、
前記マスタシリンダに形成された駆動液圧室に接続され、当該駆動液圧室内の液圧である駆動液圧を、所定の助勢限界液圧を超えない範囲で調整する駆動液圧調整装置とを備え、
前記入力ピストンが前記出力ピストンに対し離間している状態では、前記出力ピストンが前記駆動液圧に駆動されて前記シリンダ内を摺動することで、前記マスタシリンダに形成されたマスタ液圧室内の液圧であるマスタ液圧が変化し、前記入力ピストンが前記出力ピストンに当接している状態では、前記入力ピストン及び前記出力ピストンが、前記ブレーキ操作部材に連動して前記シリンダ内を摺動することで、前記マスタ液圧が変化する車両用制動装置に適用され、
前記駆動液圧が前記助勢限界液圧を超えていない場合に、当該出力ピストンが前記入力ピストンに対して離間するように、前記駆動液圧調整装置により前記駆動液圧を制御する車両用制動制御装置において、
前記ブレーキ操作部材の操作量を検出するブレーキ操作量検出手段と、
前記ブレーキ操作量検出手段により検出された前記ブレーキ操作部材の操作量であるブレーキ操作量が所定のサーボ特性変更操作量未満である場合には、前記ブレーキ操作量の増大量に対する前記駆動液圧の増大量が所定値である第1サーボ特性に基づいて、前記駆動液圧調整装置により前記駆動液圧を制御し、前記ブレーキ操作量が前記サーボ特性変更操作量以上である場合には、前記第1サーボ特性よりも前記ブレーキ操作量の増大量に対する前記駆動液圧の増大量が小さい第2サーボ特性に基づいて、前記駆動液圧調整装置により前記駆動液圧を制御する駆動液圧制御手段と、を備え、
前記サーボ特性変更操作量は、仮に前記ブレーキ操作量にかかわらず前記第1サーボ特性に基づいて前記駆動液圧を前記ブレーキ操作量の増大に応じて増大させた場合に、当該駆動液圧が前記助勢限界液圧となる前記ブレーキ操作部材の操作量である助勢限界操作量よりも小さい操作量に設定されていることを特徴とする車両用制動制御装置。
【請求項2】
前記助勢限界液圧から前記サーボ特性変更操作量における前記駆動液圧を減じて液圧差を算出し、前記入力ピストン及び前記出力ピストンが離間した状態から両ピストンが当接する時点の前記ブレーキ操作部材の操作量である当接ブレーキ操作量から前記サーボ特性変更操作量を減じて操作量差を算出し、前記液圧差を前記操作量差で除した値を、前記第2サーボ特性として設定する第2サーボ特性設定手段を備え、
前記駆動液圧制御手段は、前記第2サーボ特性設定手段により設定された第2サーボ特性に基づいて、前記ブレーキ操作量が前記サーボ特性変更操作量以上である場合の前記駆動液圧制御を実施する請求項1に記載の車両用制動制御装置。
【請求項3】
前記ブレーキ操作量と前記マスタ液圧との関係において、前記第1サーボ特性に基づく駆動液圧制御時の特性線と前記入力ピストンが前記出力ピストンに当接した状態における特性線との交点におけるブレーキ操作量を、前記サーボ特性変更操作量として設定するサーボ特性変更操作量設定手段を備え、
前記駆動液圧制御手段は、前記サーボ特性変更操作量設定手段により設定されたサーボ特性変更操作量に基づいて、前記駆動液圧制御を実施する請求項2に記載の車両用制動制御装置。
【請求項4】
前記マスタ液圧を検出するマスタ液圧検出手段と、
前記マスタ液圧検出手段により検出されたマスタ液圧の前記ブレーキ操作量の増大量に対する増大量に基づいて、前記当接ブレーキ操作量を算出する当接ブレーキ操作量算出手段を備え、
前記第2サーボ特性設定手段は、前記当接ブレーキ操作量算出手段により算出された当接ブレーキ操作量に基づいて前記第2サーボ特性を設定する請求項2又は3に記載の車両用制動制御装置。
【請求項5】
前記マスタ液圧を検出するマスタ液圧検出手段と、
前記マスタ液圧検出手段により検出されたマスタ液圧に基づいて前記マスタ液圧室から送出されたブレーキ液の液量を算出し、当該液量を前記出力ピストンの断面積で除した値に所定値を足した値を、前記当接ブレーキ操作量として算出する当接ブレーキ操作量算出手段を備え、
前記第2サーボ特性設定手段は、前記当接ブレーキ操作量算出手段により算出された当接ブレーキ操作量に基づいて前記第2サーボ特性を設定する請求項2又は3に記載の車両用制動制御装置。
【請求項6】
前記駆動液圧が前記助勢限界液圧に達するか否かを判定する駆動液圧変化判定手段を備え、
前記駆動液圧制御手段は、前記駆動液圧変化判定手段により前記駆動液圧が前記助勢限界液圧に達することが判定されている場合に、前記第1サーボ特性から前記第2サーボ特性への変更を実施する請求項1〜5のいずれか1項に記載の車両用制動制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−171431(P2012−171431A)
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願番号】特願2011−33948(P2011−33948)
【出願日】平成23年2月18日(2011.2.18)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成24年9月10日(2012.9.10)
【国際特許分類】
【出願日】平成23年2月18日(2011.2.18)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]