
車両用制動力制御装置
【課題】ブレーキペダルのペダルストローク量にノイズが混入したときであっても、ブレーキフィーリングの悪化を防止すること。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、ストロークセンサ18と、マスターシリンダ圧力センサ19と、倍力装置指令値演算手段61と、平滑化処理手段63と、を備える。ストロークセンサ18で検出されたペダルストローク量と、マスターシリンダ圧力センサ19で検出されたマスターシリンダ圧力と、から倍力装置指令値演算手段61によって倍力装置指令値が演算されて、演算された倍力装置指令値に、平滑化処理手段63によって平滑化処理を施して、電動ブースタ2の動作量とする。
【解決手段】車両用制動力制御装置は、ブレーキペダル1と、電動ブースタ2と、ストロークセンサ18と、マスターシリンダ圧力センサ19と、倍力装置指令値演算手段61と、平滑化処理手段63と、を備える。ストロークセンサ18で検出されたペダルストローク量と、マスターシリンダ圧力センサ19で検出されたマスターシリンダ圧力と、から倍力装置指令値演算手段61によって倍力装置指令値が演算されて、演算された倍力装置指令値に、平滑化処理手段63によって平滑化処理を施して、電動ブースタ2の動作量とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電動車両等に適用され、ブレーキ操作時に、ペダル踏力のアシスト力を倍力装置により得る車両用制動力制御装置に関する。
【背景技術】
【0002】
従来、マスターシリンダ圧力から目標制動力を演算し、この目標制動力を平滑化して、制動制御を行う車両用制動力制御装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−115738号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の車両用制動力制御装置にあっては、ブレーキフィーリングを向上させるために、マスターシリンダ圧力を平滑化して目標制動力を演算していた。ところが、ブレーキフィーリングには、マスターシリンダ圧力のみならず、ブレーキペダルのペダルストローク量も関係している。したがって、ペダルストローク量にノイズが混入して振動状態になると、この振動状態がブレーキフィーリングに反映されるため、ブレーキフィーリングが悪化してしまうという問題があった。
【0005】
本発明は、上記問題に着目してなされたもので、ペダルストローク量にノイズが混入しても、ブレーキフィーリングが悪化しない車両用制動力制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の車両用制動力制御装置は、ブレーキペダルと、倍力装置と、マスターシリンダと、ストローク量検出手段と、マスターシリンダ圧力検出部と、倍力装置指令値演算手段と、平滑化処理手段と、を備える手段とした。
【0007】
前記ブレーキペダルは、ブレーキ操作時に、ドライバのペダル踏力を加える。
前記倍力装置は、前記ペダル踏力にアシスト推力を加える。
前記マスターシリンダは、前記ペダル踏力をインプットロッドからバネを介してマスタ
ーシリンダピストンへ入力し、前記ペダル踏力に前記倍力装置によるアシスト推力を加え、各輪に設けられたホイールシリンダへ導くマスターシリンダ圧力を発生させる。
前記ストローク量検出手段は、ブレーキ操作時の、ブレーキペダルのペダルストローク量を検出する。
前記マスターシリンダ圧力検出手段は、前記マスターシリンダ圧力を検出する。
前記倍力装置指令値演算手段は、前記ストローク量検出手段で検出されたブレーキペダルのペダルストローク量と、前記マスターシリンダ圧力検出手段で検出されたマスターシリンダ圧力の少なくとも2つの値に基づいて倍力装置指令値を演算する。
前記平滑化処理手段は、前記倍力装置指令値演算手段によって演算された前記動作量に平滑化処理を施して、前記倍力装置の動作量とする。
【発明の効果】
【0008】
よって、ブレーキ操作時に、ストローク量検出手段で検出されたブレーキペダルのペダルストローク量と、マスターシリンダ圧力検出手段で検出されたマスターシリンダ圧力と、に基づいて、倍力装置指令値演算手段によって倍力装置指令値を演算し、この演算された倍力装置指令値に、平滑化処理手段によって平滑化処理を施して、倍力装置の動作量とすることによって、ブレーキペダルのペダルストローク量に混入したノイズが、平滑化処理手段における平滑化処理によって低減される。
この結果、ペダルストローク量にノイズが混入したときであっても、ブレーキフィーリングの悪化を防止することができる。
【図面の簡単な説明】
【0009】
【図1】実施例1の車両用制動力制御装置の全体構成を示す全体システム図である。
【図2】実施例1のブレーキコントローラの要部構成を示すソフトウェアブロック図である。
【図3】実施例1のブレーキコントローラの倍力装置指令値演算部の詳細構成を示す制御ブロック図である。
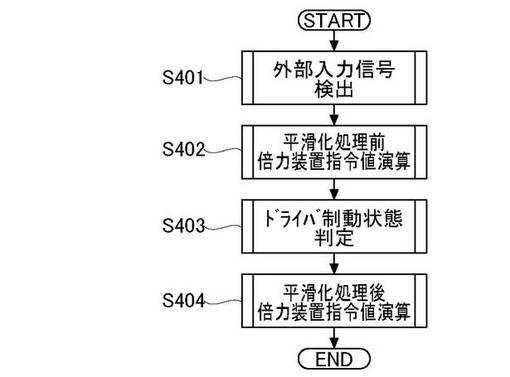
【図4】実施例1のブレーキコントローラで実行される倍力装置指令値演算処理の流れを示す全体フローチャートである。
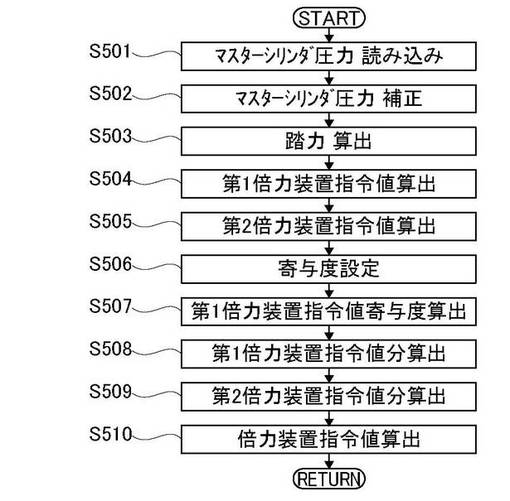
【図5】図4のフローチャートにおける平滑化処理前倍力装置指令値演算処理の流れを示す詳細フローチャートである。
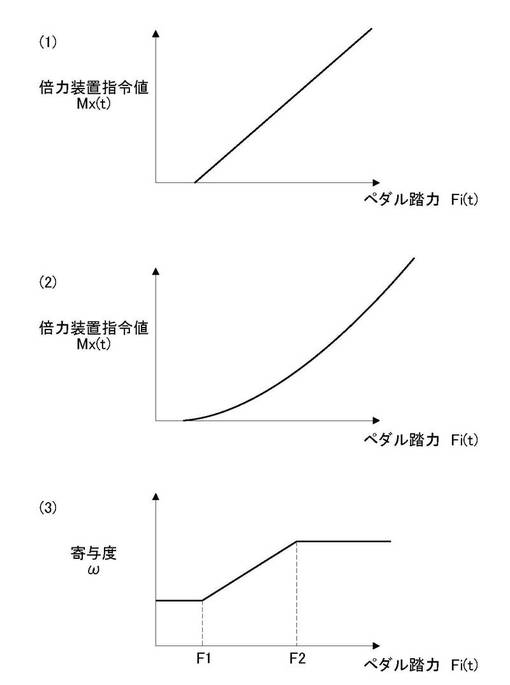
【図6】(1)実施例1におけるペダル踏力に対する倍力装置指令値の特性を示す特性図である。(2)実施例1におけるペダルストローク量に対する倍力装置指令値の特性を示す特性図である。(3)実施例1におけるペダル踏力に対する、ペダルストローク量に基づく第2倍力装置指令値の寄与度を示す特性図である。
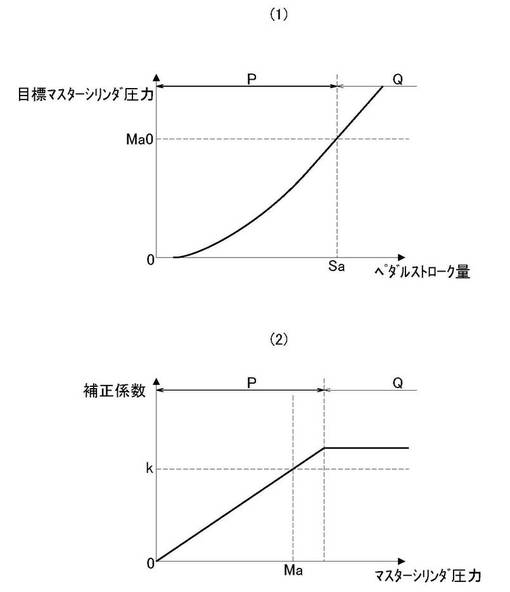
【図7】(1)実施例1におけるペダルストローク量とマスターシリンダ圧力との関係を説明する特性図である。(2)実施例1におけるマスターシリンダ圧力の補正係数を説明する特性図である。
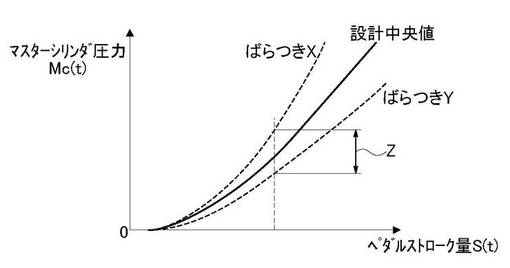
【図8】ペダルストローク量に対するマスターシリンダ圧力の関係がばらつきを持つことを説明する特性図である。
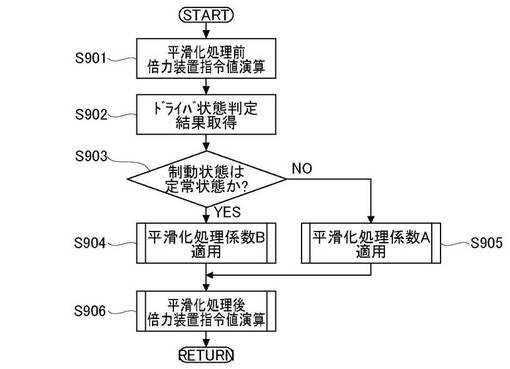
【図9】図4のフローチャートにおける平滑化処理後倍力装置指令値演算処理の流れを示す詳細フローチャートである。
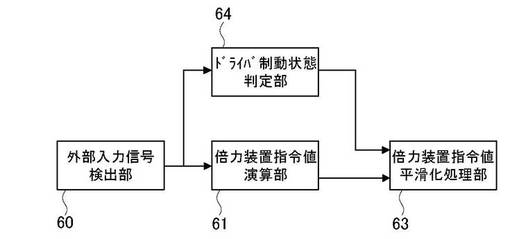
【図10】実施例2の車両用制動力制御装置のブレーキコントローラの要部構成を示すソフトウェアブロック図である。
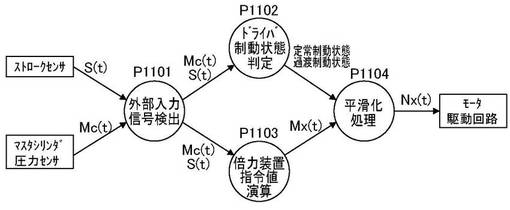
【図11】実施例2のブレーキコントローラで実行される倍力装置指令値演算処理の流れを示すデータフロー図である。
【発明を実施するための形態】
【0010】
以下、本発明の車両用制動力制御装置を実現する最良の形態を、図面に示す実施例1および実施例2に基づいて説明する。
【実施例1】
【0011】
実施例1は、本発明の車両用制動力制御装置を、電動モータを原動機とする電動車両の制動装置に適用した例である。
【0012】
[全体構成]
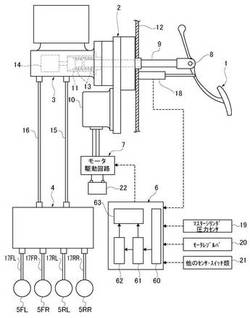
図1は、実施例1の車両用制動力制御装置の全体構成を示す全体システム図である。以下、図1に基づき、全体構成を説明する。
【0013】
実施例1の車両用制動力制御装置は、図1に示すように、ブレーキペダル1と、電動ブースタ(倍力装置)2と、マスターシリンダ3と、ブレーキ液圧アクチュエータ4と、ホイールシリンダ5FL、5FR、5RL、5RRと、ブレーキコントローラ6と、モータ駆動回路7と、を備えている。
【0014】
前記ブレーキペダル1は、ブレーキ操作時、ドライバのペダル踏力を加える。このブレーキペダル1の上端部は、車体に対して回動可能に支持されていて、ブレーキペダル1の中程部は、クレビスピン8を介してインプットロッド9に連結されている。
【0015】
前記電動ブースタ2は、ペダル踏力を電動モータ10の推力によりアシストする。この電動ブースタ2は、電動モータ10によるモータトルクを、ボールねじ等でアシスト推力に変換し、アシスト推力をプライマリピストン11(マスターシリンダピストン)に作用させる。電動ブースタ2は、マスターシリンダ3と共に、ダッシュパネル12に固定される。
【0016】
前記マスターシリンダ3は、ペダル踏力に電動モータ10によるアシスト推力を加え、
各輪に設けられたホイールシリンダ5FL、5FR、5RL、5RRへ導くマスターシリンダ圧力(プライマリ圧力、セカンダリ圧力)を発生させる。
【0017】
前記マスターシリンダ3は、インプットロッド9に加えられるペダル踏力を、一対のバネ13,13を介して入力するプライマリピストン11と、プライマリピストン11に一体連結されたセカンダリピストン14と、を有する。
【0018】
前記プライマリピストン11のピストンストロークにより作り出されたプライマリ圧力は、プライマリ圧管15を介してブレーキ液圧アクチュエータ4に導かれる。セカンダリピストン14のピストンストロークにより作り出されたセカンダリ圧力は、セカンダリ圧管16を介してブレーキ液圧アクチュエータ4に導かれる。
【0019】
前記ブレーキ液圧アクチュエータ4は、通常のブレーキ操作時には、プライマリ圧管15とセカンダリ圧管16を介して導かれたマスターシリンダ圧力を、そのまま各ホイールシリンダ5FL、5FR、5RL、5RRへと導く。
【0020】
なお、ブレーキ操作を伴うABS制御時には、マスターシリンダ圧力を減圧/保持/増圧した油圧を、各ホイールシリンダ5FL、5FR、5RL、5RRへと導く。また、ブレーキ操作を伴わないVDC制御時やTCS制御時には、電動ポンプによるポンプ圧に基づく制御油圧を、各ホイールシリンダ5FL、5FR、5RL、5RRのうち、制動力を必要とするホイールシリンダへと導く。
【0021】
前記ホイールシリンダ5FL、5FR、5RL、5RRは、各輪のブレーキ装置の位置に設けられ、ホイールシリンダ圧管17FL、17FR、17RL、17RRを介して導かれるホイールシリンダ圧に応じた制動力を各輪に与える。
【0022】
前記ブレーキコントローラ6は、マイクロコンピュータで構成され、予め実装されたソフトウェアの機能を実現する。
前記ブレーキコントローラ6は、複数の機能を実装しており、具体的には、後述するセンサから出力されて、ブレーキコントローラ6に入力された信号を検出する外部入力信号検出部60と、ブレーキ操作時に、マスターシリンダ圧力Mc(t)とペダルストローク量S(t)とに基づいて、目標制動力を発生させるための倍力装置指令値を演算する倍力装置指令値演算部61(倍力装置指令値演算手段)と、演算された倍力装置指令値に基づいてドライバの制動操作の状態を判定するドライバ制動状態判定部62(ドライバ制動状態判定手段)と、演算された倍力装置指令値を平滑化処理する倍力装置指令値平滑化処理部63(平滑化処理手段)と、を有する。
【0023】
前記ブレーキコントローラ6は、倍力装置指令値平滑化処理部63の演算結果を、モータ駆動信号としてモータ駆動回路7に出力し、目標制動力を発揮するアシスト推力を得る。
【0024】
前記ブレーキコントローラ6には、ブレーキペダル1に設けられてブレーキペダル1のペダルストローク量を検出するストロークセンサ18(ストローク量検出手段)と、マスターシリンダ圧力センサ19(マスターシリンダ圧力検出手段)と、電動モータ10の回転角を検出するモータレゾルバ20と、他のセンサ・スイッチ類21からの検出情報が入力される。
【0025】
前記他のセンサ・スイッチ類21からの検出情報としては、例えば、温度センサや回転数センサなどによる検出情報が用いられ、倍力装置指令値がより詳細に演算されるが、本実施例では、ストロークセンサ18と、マスターシリンダ圧力センサ19の出力のみに限定して説明を進める。
【0026】
前記ストロークセンサ18は、ブレーキペダル1のペダルストローク量に応じた変位量を検出する変位センサであり、一般的に、抵抗体の抵抗値の変化によって変位量を検出する、所謂ポテンショメータが用いられる。
【0027】
前記モータ駆動回路7は、ブレーキコントローラ6から出力されたモータ駆動信号に応じて、バッテリー22の電源電流(電源電圧)を、電動モータ10の駆動電流(駆動電圧)に変換する。
【0028】
[制御構成]
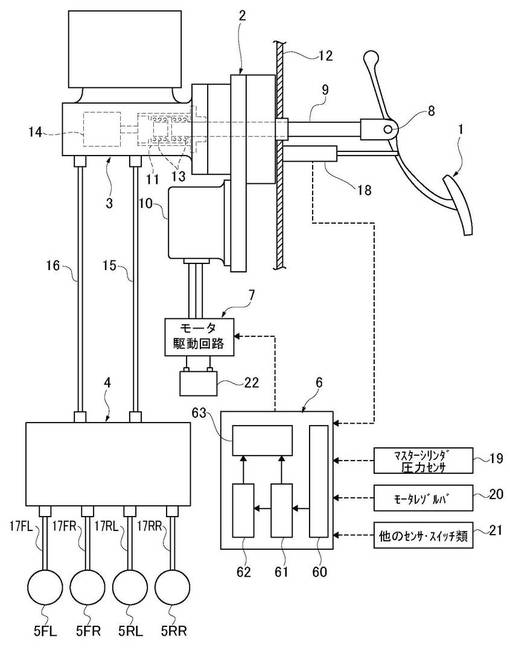
図2は、実施例1の車両用制動力制御装置のブレーキコントローラ6に実装されて、倍力装置指令値演算処理を行うソフトウェアの構成を示すブロック図である。
以下、図2に基づき、要部構成を説明する。
【0029】
前記ブレーキコントローラ6は、図2に示すように、外部入力信号検出部60と、倍力装置指令値演算部61(倍力装置指令値演算手段)と、ドライバ制動状態判定部62(ドライバ制動状態判定手段)と、倍力装置指令値平滑化処理部63(平滑化処理手段)と、を備えている。
【0030】
前記外部入力信号検出部60は、ストロークセンサ18(ストローク量検出手段)やマスターシリンダ圧力センサ19(マスターシリンダ圧力検出部)などの外部センサから出力されて、ブレーキコントローラ6に入力された信号を検出する。
【0031】
前記倍力装置指令値演算部61は、外部入力信号検出部60において検出された信号に基づいて、倍力装置2に指令して所定の制動力を得るための倍力装置指令値を演算する。
【0032】
前記ドライバ制動状態判定部62は、倍力装置指令値演算部61において演算された倍力装置指令値に基づいて、ドライバの制動操作の状態を判定する。
【0033】
前記倍力装置指令値平滑化処理部63は、前記ドライバ制動状態判定部62において判定されたドライバの制動操作の状態に応じた平滑化処理係数を設定して、この平滑化処理係数に基づいて、倍力装置指令値演算部61において演算された倍力装置指令値を平滑化処理する。
【0034】
次に、倍力装置指令値演算部61の詳細構成を説明する。
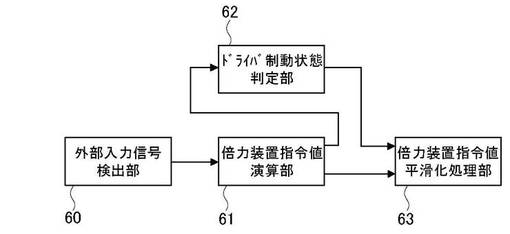
図3は、倍力装置指令値演算部61の詳細構成を示す制御ブロック図である。
【0035】
前記倍力装置指令値演算部61は、図3に示すように、マスターシリンダ圧力補正部610と、ペダル踏力算出部611と、第1倍力装置指令値算出部612と、第2倍力装置指令値算出部613と、寄与度設定部614と、第1倍力装置指令値寄与度算出部615と、第1倍力装置指令値分算出部616と、第2倍力装置指令値分算出部617と、倍力装置指令値算出部618と、を備えている。
【0036】
前記マスターシリンダ圧力補正部610は、外部入力信号検出部60において検出されたマスターシリンダ圧力を補正する。
【0037】
前記ペダル踏力算出部611は、マスターシリンダ圧力に基づいて、ブレーキペダル1へのペダル踏力を算出する。
【0038】
前記第1倍力装置指令値算出部612は、ペダル踏力算出部611で算出されたペダル踏力に基づく第1倍力装置指令値を算出する。
【0039】
前記第2倍力装置指令値算出部613は、ストロークセンサ18で検出されたペダルストローク量に基づく第2倍力装置指令値を算出する。
【0040】
前記寄与度設定部614は、ペダル踏力算出部611で算出されたペダル踏力に基づいて、倍力装置指令値に対するペダルストローク量に基づく第2倍力装置指令値の寄与度ωを設定する。
【0041】
前記第1倍力装置指令値寄与度算出部615は、ペダル踏力に基づく第1倍力装置指令値の寄与度を算出する。
【0042】
前記第1倍力装置指令値分算出部616は、ペダル踏力に基づく第1倍力装置指令値分を算出する。
【0043】
前記第2倍力装置指令値分算出部617は、ペダルストローク量に基づく第2倍力装置指令値分を算出する。
【0044】
前記倍力装置指令値算出部618は、倍力装置指令値を算出する。
【0045】
[フロー構成]
図4は、実施例1のブレーキコントローラ6において実行される倍力装置指令値演算処理の流れを示す。
【0046】
ステップS401では、外部入力信号検出部60において、ストロークセンサ18からペダルストローク量を検出して、マスターシリンダ圧力センサ19からマスターシリンダ圧力を検出して、倍力装置指令値演算部61に入力する。
【0047】
以後、時刻tにおけるペダルストローク量をS(t)で表し、時刻tにおけるマスターシリンダ圧力をMc(t)で表す。
【0048】
ステップS402では、倍力装置指令値演算部61において、倍力装置指令値を算出する演算を行う。
倍力装置指令値の算出方法については後述する。
以後、時刻tにおける倍力装置指令値をMx(t)で表す。
【0049】
ステップS403では、ドライバ制動状態判定部62において、ドライバ制動状態の判定を行う。
このドライバ制動状態の判定は、倍力装置指令値Mx(t)の所定時間Δt内での偏差ΔMx(t)=Mx(t)−Mx(t−Δt)に基づいて行う。ここで、Δtは倍力装置指令値を演算する演算周期であり、例えば、Δt=10msecの値をとる。
【0050】
倍力装置指令値の所定時間内での偏差ΔMx(t)が所定値以上である場合を過渡制動状態とみなし、倍力装置指令値の所定時間内での偏差ΔMx(t)が所定値未満である場合を定常制動状態とみなす。
【0051】
ステップS404では、ステップS402で演算された倍力装置指令値Mx(t)と、ステップS403で判定されたドライバ制動状態と、に基づいて、倍力装置指令値平滑化処理部63において、平滑化された倍力装置指令値(平滑化倍力装置指令値)を算出する演算を行う。
平滑化倍力装置指令値の算出方法については後述する。
以後、平滑化された倍力装置指令値(平滑化倍力装置指令値)をNx(t)で表す。
【0052】
以下、ステップS402で行われる倍力装置指令値Mx(t)の算出方法について、図5を用いて説明する。
【0053】
ステップS501では、外部入力信号検出部60に入力された、マスターシリンダ圧力Mc(t)の値が、マスターシリンダ圧力補正部610に読み込まれる。
【0054】
ステップS502では、マスターシリンダ圧力補正部610において、マスターシリンダ圧力Mc(t)の補正を行う。
マスターシリンダ圧力Mc(t)の補正方法については後述する。
【0055】
ステップS503では、ペダル踏力算出部611が、次の(式1)によって算出されるインプットロッド入力をペダル踏力として算出する。
以後、インプットロッド入力(ペダル踏力)をFi(t)で表す。
インプットロッド入力(Fi(t))=マスターシリンダ圧力(Mc(t))×インプットロッド面積(Ai)+バネ定数(K)×インプットロッドとマスターシリンダピストンとの相対変位量(Δx(t)) (式1)
ここで、インプットロッド9のインプットロッド面積(Ai)と一対のバネ13、13によるバネ定数(K)とは、既知の固定値である。
マスターシリンダ圧力(Mc(t))は、マスターシリンダ圧力センサ19から取得する。
相対変位量(Δx(t))は、ストロークセンサ18によりインプットロッド9の位置情報を取得し、マスターシリンダピストン11の位置情報をモータレゾルバ20から取得したモータ回転位置から推定する。
そして、インプットロッド9の位置と、マスターシリンダピストン11の位置と、の差を相対変位量(Δx(t))とする。
【0056】
ステップS504では、第1倍力装置指令値算出部612において、ペダル踏力算出部611で算出されたペダル踏力Fi(t)に基づいて、実験等を行って予め作成して第1倍力装置指令値算出部612に格納されている、ペダル踏力Fi(t)に対する倍力装置指令値Mx(t)の特性を用いて、ペダル踏力に基づく第1倍力装置指令値を算出する。
ペダル踏力Fi(t)に対する倍力装置指令値Mx(t)の特性の1例を、図6(1)に示す。
【0057】
ステップS505では、第2倍力装置指令値算出部613において、ストロークセンサ18で検出されたペダルストローク量S(t)に基づいて、実験等を行って予め作成して第2倍力装置指令値算出部613に格納されている、ペダルストローク量S(t)に対する倍力装置指令値Mx(t)の特性を用いて、ペダルストローク量に基づく第2倍力装置指令値を算出する。
ペダルストローク量S(t)に対する倍力装置指令値Mx(t)の特性の1例を、図6(2)に示す。
【0058】
ステップS506では、寄与度設定部614において、実験等を行って予め作成して寄与度設定部614に格納されている、倍力装置指令値に対するペダル踏力の寄与度を表す特性を用いて、ペダル踏力算出部611で算出したペダル踏力Fi(t)に応じた、倍力装置指令値Mx(t)に対するペダルストローク量に基づく第2倍力装置指令値の寄与度ωを設定する。
倍力装置指令値に対するペダル踏力の寄与度を表す特性の1例を、図6(3)に示す。
【0059】
図6(3)では、ペダル踏力Fi(t)が0〜F1までの領域において、ペダルストローク量S(t)に基づく第2倍力装置指令値の寄与度ωを小さな一定値に設定する。ペダル踏力Fi(t)がF2を超える領域において、ペダルストローク量S(t)に基づく第2倍力装置指令値の寄与度ωを大きな一定値に設定する。そして、ペダル踏力Fi(t)がF1〜F2の領域において、ペダルストローク量S(t)に基づく第2倍力装置指令値の寄与度ωを小さな一定値から大きな一定値まで徐々に変化する値に設定する。
【0060】
ステップS507では、第1倍力装置指令値寄与度算出部615において、(1−ω)の式により、ペダル踏力に基づく第1倍力装置指令値の寄与度を算出する。
【0061】
ステップS508では、第1倍力装置指令値分算出部616において、第1倍力装置指令値算出部612で算出されたペダル踏力Fi(t)に基づく第1倍力装置指令値と、第1倍力装置指令値寄与度算出部615で設定されたペダル踏力Fi(t)に基づく第1倍力装置指令値の寄与度(1−ω)と、を掛け合わせて、ペダル踏力に基づく第1倍力装置指令値分を算出する。
【0062】
ステップS509では、第2倍力装置指令値分算出部617において、第2倍力装置指令値算出部613で算出されたペダルストローク量S(t)に基づく第2倍力装置指令値と、寄与度設定部614で設定されたペダルストローク量S(t)に基づく第2倍力装置指令値の寄与度ωと、を掛け合わせて、ペダルストローク量S(t)に基づく第2倍力装置指令値分を算出する。
【0063】
ステップS510では、倍力装置指令値算出部618において、第1倍力装置指令値分算出部616で算出されたペダル踏力Fi(t)に基づく第1倍力装置指令値分と、第2倍力装置指令値分算出部617で算出されたペダルストローク量S(t)に基づく第2倍力装置指令値分と、を加算して、倍力装置指令値Mx(t)を算出する。
【0064】
次に、作用を説明する。
まず、「比較例の制動力制御の課題」の説明を行う。続いて、実施例1の車両用制動力制御装置における作用を、「目標制動力演算作用」、「ドライバ制動状態判定作用」、「ドライバ制動状態に応じた平滑化処理作用」に分けて説明する。
【0065】
[比較例の課題]
特開平11−115738号公報に記載されている技術を比較例とする。
この比較例では、所要制動トルク対応量(本願発明の目標制動力に対応する)を検出している。そして、検出された所要制動トルク対応量(マスターシリンダ圧力)に対して平滑化処理を行い、この平滑化処理された信号に基づいて制動力を制御している。
【0066】
比較例に記載されている技術にあっては、検出された1つの信号(マスターシリンダ圧力)に対して平滑化処理を行い、この平滑化処理された信号に基づいて制動力を制御している。
【0067】
したがって、平滑化処理に用いたマスターシリンダ圧力以外の信号のうち、ブレーキフィーリングに影響を及ぼす信号、例えば、ブレーキペダルのペダルストローク量S(t)にノイズが重畳して振動状態になると、ブレーキフィーリングが悪化してしまうという課題があった。
【0068】
ペダルストローク量を検出するストロークセンサ18は、ブレーキペダルの踏み込みに伴って発生する摺動子の摺動量を、抵抗値の変化として検出する構成になっている。
したがって、ブレーキペダルを踏み込んだときには、摺動子の摺動という機械的な接触が発生するため、その構成上、摺動ノイズの発生を避けることはできない。
【0069】
さらに、ブレーキペダル1を踏み込んだときには、ブレーキペダル1の揺らぎや車両の振動などによって摺動子が振動するため、振動状態のノイズが発生して、このノイズがストロークセンサ18の出力に混入する。また、ストロークセンサ18には、車両環境特有の高周波ノイズも混入する。
【0070】
この結果、ドライバがブレーキペダル1を踏み込んだときには、ストロークセンサ18から出力されるペダルストローク量S(t)には、様々なノイズが重畳される。そして、これらのノイズの混入によって、ブレーキフィーリングが悪化してしまう。
【0071】
さらに、マスターシリンダ圧力Mc(t)にも、外乱によってノイズが混入する可能性がある。
【0072】
[目標制動力演算作用]
ブレーキフィーリングを悪化させないため、ストロークセンサ18で検出したペダルストローク量S(t)に混入したノイズや、マスターシリンダ圧力Mc(t)に混入したノイズを低減することが必要である。
以下、これを反映する作用を説明する。
【0073】
まず、前記したステップS502で行われるマスターシリンダ圧力Mc(t)の補正方法について、図7(1)、(2)、および図8を用いて説明する。
図7(1)は、ストロークセンサ18の出力と、ブレーキペダル1が所定のペダルストローク量で踏み込まれたときに、マスターシリンダ3に発生させるべき目標マスターシリンダ圧力(目標制動力)との関係を示す特性図である。この特性図は、実験等を行って予め作成して、倍力装置指令値演算部61に格納しておく。
ペダルストローク量が小さい領域Pでは、ペダルストローク量に対して目標マスターシリンダ圧力は2次曲線的に増加する。
ペダルストローク量が大きい領域Qでは、ペダルストローク量に対して目標マスターシリンダ圧力は線形に増加する。
【0074】
ブレーキペダル1をペダルストローク量S(t)=Saで踏み込んだときに発生するマスターシリンダ圧力Mc(t)=Maは、図8に示すように、部品のばらつき、エア混入、ブレーキキャリパのノックバック、等を原因として、設計中央値とは異なる関係となることがある。
つまり、ペダルストローク量に対してマスターシリンダ圧力が設計中央値より高くなる「ばらつきX」やペダルストローク量に対してマスターシリンダ圧力が設計中央値より低くなる「ばらつきY」が発生する。
このため、同じペダルストローク量に対して、図8に示すように、範囲Zに亘って、マスターシリンダ圧力のばらつきが発生する。
したがって、所定のマスターシリンダ圧力を出すためには、検出されたマスターシリンダ圧力を補正する必要がある。
【0075】
図7(2)は、マスターシリンダ圧力の補正を行うために、予め実験等によって求めた、補正係数kの特性図である。この特性図は、予め倍力装置指令値演算部61に格納しておき、倍力装置指令値を演算する際に読み出されて使用される。
【0076】
図7(2)は、ブレーキペダル1がペダルストローク量S(t)=Saで踏み込まれたときに、マスターシリンダ圧力センサ19で、実際に測定されたマスターシリンダ圧力Mc(t)=Mbを、ペダルストローク量がSaであるときの目標マスターシリンダ圧力Ma0と等しくなるように補正するための補正係数がk(=Ma0/Mb)であることを示している。
【0077】
図7(2)において、ペダルストローク量が小さい領域Pでは、マスターシリンダ圧力はペダルストローク量に対して2次曲線的に増加する特性を有するため、補正係数kは、マスターシリンダ圧力に対して線形に増加する特性を有する。
【0078】
さらに、ペダルストローク量が大きい領域Qでは、マスターシリンダ圧力はペダルストローク量に対して線形に増加する特性を有するため、補正係数kは、マスターシリンダ圧力によらずに一定になる。
【0079】
前記したステップS502では、読み込まれたマスターシリンダ圧力Mc(t)=Mbの値に応じた補正係数kの値を図7(2)の特性図から読み取って、読み取られた補正係数kと、計測されたマスターシリンダ圧力Mbと、を積算して、補正されたマスターシリンダ圧力Mc(t)=kMbを算出する。
【0080】
次に、前記したステップS404で行われる平滑化処理後倍力装置指令値演算処理の流れを、図9に示すフローチャートを用いて説明する。
【0081】
ステップS901では、倍力装置指令値演算部61によって演算された倍力装置指令値Mx(t)が取得され、ステップS902に進む。
【0082】
ステップS902では、ドライバ制動状態判定部62において行われたドライバ制動状態の判定結果が取得され、ステップS903に進む。
【0083】
ステップS903では、取得したドライバ制動状態の判定結果に基づいて、ドライバ制動状態が定常制動状態であるか否かが判定される。
ステップS903がYesのとき、すなわちドライバ制動状態が定常制動状態であるときには、ステップS904に進み、ステップS903がNoのとき、すなわちドライバ制動状態が過渡制動状態であるときには、ステップS905に進む。
【0084】
ステップS904では、倍力装置指令値平滑化処理部63が、平滑化処理係数Bを設定する処理を行い、ステップS906に進む。
平滑化処理係数Bの設定方法については、後述する。
【0085】
ステップS905では、倍力装置指令値平滑化処理部63が、平滑化処理係数Bに対して、倍力装置指令値Mx(t)の波形をより平滑化することができる(平滑化効果が高い)、平滑化処理係数Aを設定する処理を行い、ステップS906に進む。
平滑化処理係数Aの設定方法については、後述する。
【0086】
ステップS906では、倍力装置指令値平滑化処理部63において、ステップS904で算出された平滑化処理係数B、またはステップS905で算出された平滑化処理係数Aと、倍力装置指令値Mx(t)との積和演算を行って、平滑化倍力装置指令値Nx(t)が演算される。
【0087】
ステップS903から、ステップS904を経てステップS906に進んだときには、次の(式2)によって平滑化倍力装置指令値Nx(t)が演算される。
Nx(t)=B×Mx(t)+(1−B)×Mx(t−Δt) (式2)
【0088】
また、ステップS903から、ステップS905を経てステップS906に進んだときには、次の(式3)によって平滑化倍力装置指令値Nx(t)が演算される。
Nx(t)=A×Mx(t)+(1−A)×Mx(t-Δt) (式3)
【0089】
ステップS906において演算された、平滑化倍力装置指令値Nx(t)は、モータ駆動信号としてモータ駆動回路7に与えられ、モータ駆動回路7において、バッテリー22の電源電流(電源電圧)を電動モータ10の駆動電流(駆動電圧)に変換する。
【0090】
変換された電動モータ10の駆動電圧は、電動モータ10に印加されて、電動モータ10に、駆動電圧に応じたトルクを発生させて、目標制動力を発揮するアシスト推力を得る。
【0091】
次に、ステップS904で行う平滑化処理係数Bの設定方法と、S905で行う平滑化処理係数Aの設定方法について説明する。
倍力装置指令値Mx(t)の平滑化処理とは、異なる複数の時刻に出力された倍力装置指令値Mx(t)とMx(t−Δt)に、それぞれ、合計値が1になるような平滑化処理係数を掛けて総和を求め、こうして演算された値を、新たに時刻tにおける平滑化倍力装置指令値Nx(t)とする処理を行うことである。
【0092】
平滑化処理係数の値は、平滑化時定数の値に基づいて決められ、長い平滑化時定数に基づいて決められた平滑化処理係数を用いると、平滑化効果が高くなって、倍力装置指令値Mx(t)の変動量を小さく抑えることができる。
一方、短い平滑化時定数に基づいて決められた平滑化処理係数を用いると、平滑化効果は低くなるが、倍力装置指令値Mx(t)の応答性が高くなる。
【0093】
本実施例では、平滑化処理係数を設定する際に、異なる2種類の平滑化時定数TA、TBを適用する。ここで、TAとTBとは、TA>TBの関係にあるものとする。
【0094】
平滑化時定数をTAにしたときの平滑化処理係数Aは、演算周期をΔtとすると、次の(式4)で表される。
A=1−exp(−Δt/TA) (式4)
【0095】
また、平滑化時定数をTBにしたときの平滑化処理係数Bは、次の(式5)で表される。
B=1−exp(−Δt/TB) (式5)
【0096】
ステップS904では(式5)によって平滑化処理係数Bが算出され、ステップS905では(式4)によって平滑化処理係数Aが算出される。
【0097】
上記したように、実施例1では、倍力装置指令値演算手段61が、ストローク量検出手段18で検出されたブレーキペダル1のペダルストローク量S(t)と、マスターシリンダ圧力検出手段19で検出されたマスターシリンダ圧力Mc(t)の少なくとも2つの値に基づいて、倍力装置指令値Mx(t)を演算して、平滑化処理手段63が、倍力装置指令値演算手段61において演算された倍力装置指令値に平滑化処理を施して、平滑化された倍力装置指令値Nx(t)を算出して、この平滑化された倍力装置指令値Nx(t)を倍力装置2の動作量とする構成を採用した。
【0098】
したがって、ノイズを含むペダルストローク量S(t)やマスターシリンダ圧力Mc(t)に基づいて演算された倍力装置指令値Mx(t)に平滑化処理が施されるため、倍力装置指令値に含まれるノイズが低減される。
このため、ノイズが混入したときであっても、倍力装置2の動作量の変動が小さくなって、ブレーキフィーリングの悪化を防止することができる。
【0099】
[ドライバ制動状態判定作用]
ドライバの制動状態によらずに、ブレーキフィーリングの悪化を防止する必要がある。以下、これを反映する作用を説明する。
【0100】
上記したように、実施例1では、ドライバ制動状態判定部62において、倍力装置指令値Mx(t)の所定時間内での偏差ΔMx(t)が所定値以上である場合を過渡制動状態とみなし、倍力装置指令値Mx(t)の所定時間内での偏差ΔMx(t)が所定値未満である場合を定常制動状態とみなして、倍力装置指令値平滑化処理部63が、倍力装置指令値に対して、ドライバ制動状態に応じた平滑化効果を有する平滑化処理を行う構成を採用した。
【0101】
したがって、過渡制動状態と定常制動状態の両方において、倍力装置指令値を適切に平滑化することができる。
このため、ドライバの制動状態によらずに、倍力装置指令値に含まれるノイズを低減することができ、これによって、ドライバの制動状態にかかわらず、ブレーキフィーリングの悪化を防止することができる。
【0102】
[ドライバ制動状態に応じた平滑化処理作用]
ストロークセンサ18から発生する摺動ノイズは、一般に、ペダルストローク量S(t)が一定である定常制動状態よりも、ペダルストローク量S(t)の変化量が大きい、ブレーキペダル1の踏み込み時(過渡制動状態)に大きくなる。
したがって、ノイズが多い過渡制動状態において、倍力装置指令値Mx(t)のノイズを効果的に低減するため、過渡制動状態において、定常制動状態よりも平滑化効果を高くすることが必要である。
以下、これを反映する作用を説明する。
【0103】
上記したように、実施例1では、ドライバ制動状態判定部62において、倍力装置指令値Mx(t)の所定時間内での偏差ΔMx(t)が所定値以上である場合を過渡制動状態とみなし、倍力装置指令値Mx(t)の所定時間内での偏差ΔMx(t)が所定値未満である場合を定常制動状態とみなして、倍力装置指令値平滑化処理部63が、ドライバ制動状態が過渡制動状態であるときには、定常制動状態であるときよりも平滑化効果が高い平滑化処理を行う構成を採用した。
【0104】
したがって、倍力装置指令値Mx(t)の平滑化効果が、過渡制動状態において、定常制動状態よりも高く設定されるため、過渡制動状態において、ノイズの影響による倍力装置指令値Mx(t)の変動を低減することができる。このため、高いノイズ低減効果が得られる。
【0105】
次に、効果を説明する。
実施例1の車両用制動力制御装置にあっては、下記に列挙する効果を得ることができる。
【0106】
(1)ブレーキ操作時に、ドライバのペダル踏力を加えるブレーキペダル1と、
前記ペダル踏力にアシスト推力を加える倍力装置2と、
前記ペダル踏力をインプットロッド9からバネ13を介してマスターシリンダピストン11へ入力し、前記ペダル踏力に前記倍力装置2によるアシスト推力を加え、各輪に設けられたホイールシリンダ5FL、5FR、5RL、5RRへ導くマスターシリンダ圧力を発生させるマスターシリンダ3と、
ブレーキ操作時の、ブレーキペダル1のペダルストローク量を検出するストローク量検出手段18と、前記マスターシリンダ圧力を検出するマスターシリンダ圧力検出手段19と、
前記ストローク量検出手段18で検出されたブレーキペダルのストローク量と、前記マスターシリンダ圧力検出手段19で検出されたマスターシリンダ圧力の少なくとも2つの値に基づいて、前記倍力装置2の動作量を演算する倍力装置指令値演算手段61と、
前記倍力装置指令値演算手段61において演算された前記動作量に平滑化処理を施して、前記倍力装置の動作量とする平滑化処理手段63と、
を備える。
このため、ブレーキペダルのペダルストローク量にノイズが混入したときであっても、ブレーキフィーリングの悪化を防止することができる。
【0107】
(2)ドライバの要求する制動状態を判定するドライバ制動状態判定手段62を有し、平滑化処理手段63において、ドライバ制動状態判定手段62で判定された制動状態に基づいた平滑化処理を行う。
このため、(1)の効果に加え、ドライバの制動状態に応じて適切な制動応答を実現して、ブレーキフィーリングを一層向上させることができる。
【0108】
(3)ドライバ制動状態判定手段62は、倍力装置の動作量の変化量が所定値以上であるときを過渡制動状態と判定し、倍力装置の動作量の変化量が所定値未満であるときを定常制動状態と判定する。
このため、(1)、(2)の効果に加え、センサのばらつきやノイズの混入状態によらずに、ブレーキフィーリングを向上させることができる。
【0109】
(4)ドライバの制動状態が過渡制動状態と判定されたときには、定常制動状態と判定されたときに対して、平滑化処理手段63において、平滑化効果が高い平滑化処理を行う。
このため、(1)〜(3)の効果に加え、過渡制動状態にあるときには、倍力装置指令値がより滑らかに平滑化されることによって、倍力装置指令値Mx(t)の波形が滑らかになってノイズ低減効果が高くなる。一方、定常制動状態にあるときには、倍力装置指令値の平滑化度合いが小さいため、倍力装置指令値Mx(t)の元の波形が維持されて、応答性が高くなる。
したがって、ドライバの制動状態に応じた適切な制動応答が実現されて、ブレーキフィーリングをより一層向上させることができる。
【実施例2】
【0110】
実施例2は、ドライバ制動状態判定手段62が、ペダルストローク量S(t)とマスターシリンダ圧力Mc(t)のうち、少なくとも一方の、所定時間内での偏差が所定値以上であるときを過渡制動状態と判定し、所定時間内での偏差がともに所定値未満であるときを定常制動状態と判定するようにした例である。
【0111】
[全体構成]
実施例2の全体構成は、ブレーキコントローラ6の要部構成を除いて、実施例1の図1と同様であるため、図示を省略する。
図10は、実施例2の車両用制動力制御装置のブレーキコントローラ6の要部構成を示すソフトウェアブロック図である。以下、図10に基づいて全体構成を説明する。
なお、この倍力装置指令値を演算する処理は、例えば、10msec間隔で実行される。
【0112】
実施例2の車両用制動力制御装置が備えるブレーキコントローラ6は、ストロークセンサ18と、マスターシリンダ圧力センサ19と、から出力されて、ブレーキコントローラ6に入力された信号を検出する外部入力信号検出部60と、ブレーキ操作時に、マスターシリンダ圧力Mc(t)とペダルストローク量S(t)とに基づいて倍力装置指令値を演算する倍力装置指令値演算部61(倍力装置指令値演算手段)と、マスターシリンダ圧力Mc(t)とペダルストローク量S(t)とに基づいてドライバの制動操作の状態を判定するドライバ制動状態判定部64(ドライバ制動状態判定手段)と、演算された倍力装置指令値を平滑化処理する倍力装置指令値平滑化処理部63(平滑化処理手段)と、を有する。
【0113】
[制御構成]
図11は、実施例2の車両用制動力制御装置のブレーキコントローラ6において、倍力装置指令値演算処理を行うソフトウェアのデータフロー図である。以下、図11の各プロセスについて説明する。
【0114】
プロセスP1101では、ストロークセンサ18からペダルストローク量S(t)を外部入力信号検出部60に入力し、マスターシリンダ圧力センサ19からマスターシリンダ圧力Mc(t)を外部入力信号検出部60に入力する。
外部入力信号検出部60で検出された信号は、倍力装置指令値演算部61と、ドライバ制動状態判定部64と、に送られる。
【0115】
プロセスP1102では、ドライバ制動状態判定部64において、ドライバ制動状態の判定を行う。
【0116】
ドライバ制動状態の判定は、ペダルストローク量S(t)の所定時間Δt内での偏差ΔS(t)=S(t)―S(t―Δt)、および、マスターシリンダ圧力Mc(t)の所定時間Δt内での偏差ΔMc(t)=Mc(t)―Mc(t―Δt)に基づいて行う。
ここで、Δtは前記したように、倍力装置指令値を演算する演算周期であり、例えば、Δt=10msecの値をとる。
【0117】
ペダルストローク量S(t)の所定時間Δt内での偏差ΔS(t)、またはマスターシリンダ圧力Mc(t)の所定時間Δt内での偏差ΔMc(t)の少なくとも一方が所定値以上である場合を過渡制動状態とみなし、ペダルストローク量S(t)の所定時間Δt内での偏差ΔS(t)と、マスターシリンダ圧力Mc(t)の所定時間Δt内での偏差ΔMc(t)と、がともに所定値未満である場合を定常制動状態とみなす。
【0118】
判定された、ドライバ制動状態は、倍力装置指令値平滑化処理部63に送られる。
【0119】
プロセスP1103では、倍力装置指令値演算部61において、目標制動力を発生させるための倍力装置指令値Mx(t)を演算する。
倍力装置指令値の演算方法は、実施例1で説明した通りであるため、説明は省略する。
演算された倍力装置指令値Mx(t)は、倍力装置指令値平滑化処理部63に送られる。
【0120】
ここで、プロセスP1102におけるドライバ制動状態の判定と、プロセスP1103における倍力装置指令値Mx(t)の演算と、はお互いの出力に影響されないため、独立して実行することが可能である。
したがって、ブレーキコントローラ6を構成するハードウェアとそこに実装するソフトウェアを、並列処理を行うことができるような構成とすることによって、ドライバ制動状態の判定と、倍力装置指令値Mx(t)の演算と、を同時に実行することが可能である。なお、並列処理を行うことができる構成とは、例えば、CPUを2台実装して、各々のCPUで異なる処理を行う方法や、1台のCPUをマルチタスク処理が可能なオペレーティングシステム(OS)上で動作させることによって並列処理を行う方法などがある。
【0121】
プロセスP1104では、プロセスP1103で演算された倍力装置指令値Mx(t)と、プロセスP1102で判定されたドライバ制動状態と、に基づいて、倍力装置指令値平滑化処理部63において、平滑化倍力装置指令値Nx(t)が演算される。
【0122】
平滑化倍力装置指令値Nx(t)は、実施例1に記載した(式4)と(式5)によって演算されるため、説明は省略する。
【0123】
次に、作用を説明する。
ブレーキの応答性を上げるため、ドライバの制動状態をなるべく速く検出して、検出された制動状態に応じた平滑化処理を行って倍力装置指令値を演算することが必要である。
【0124】
以下、これを反映する作用を説明する。
上記したように、実施例2では、ドライバ制動状態判定部64が、ストローク量検出手段18で検出されたペダルストローク量S(t)と、マスターシリンダ圧力検出手段19で検出されたマスターシリンダ圧力Mc(t)の少なくとも2つの値に基づいて、ドライバの制動状態を判定する構成を採用した。
【0125】
したがって、倍力装置指令値演算部61において目標制動力を発生させるための倍力装置指令値の演算結果が出力された後で、ドライバ制動状態を判定する必要がない。
【0126】
すなわち、ドライバ制動状態は、ストローク量検出手段18で検出されたペダルストローク量S(t)と、マスターシリンダ圧力検出手段19で検出されたマスターシリンダ圧力Mc(t)に基づいて判定されるため、倍力装置指令値Mx(t)を算出する演算と、ドライバ制動状態の判定とを、並列に行うことができる。
【0127】
したがって、倍力装置指令値の演算結果が出力された後、即座に、平滑化処理手段63において平滑化演算を行うことができる。
なお、他の作用は、実施例1と同様であるので、説明を省略する。
【0128】
次に、効果を説明する。
実施例2の車両用制動力制御装置にあっては、下記の効果を得ることができる。
(5) ペダルストローク量S(t)の所定時間Δt内での偏差ΔS(t)、またはマスターシリンダ圧力Mc(t)の所定時間Δt内での偏差ΔMc(t)の少なくとも一方が所定値以上である場合を過渡制動状態とみなす。また、ペダルストローク量S(t)の所定時間Δt内での偏差ΔS(t)とマスターシリンダ圧力Mc(t)の所定時間Δt内での偏差ΔMc(t)が、ともに所定値未満である場合を定常制動状態とみなす。
そして、過渡制動状態であるときは、定常制動状態であるときに比べて、平滑化処理手段63において平滑化効果が高い平滑化処理を行う。
このため、センサの出力信号からドライバの制動状態を直接判定していることによって、センサ出力にノイズが混入したときに、より適切に対処することができる。
したがって、(1)〜(4)の効果に加え、ドライバの制動状態に応じて適切な制動応答を実現し、ブレーキフィーリングをさらに向上させることができる。
【0129】
(6)倍力装置指令値Mx(t)の演算と、ドライバ制動状態の判定とは、ブレーキコントローラ6において並列に処理することができる。
これによって、倍力装置指令値Mx(t)の演算が終了したときには、ドライバ制動状態の判定が終了しているため、倍力装置指令値Mx(t)の演算が終了してから、平滑化処理演算を開始するまでの時間を短縮することができる。
したがって、(1)〜(5)の効果に加え、制動制御の応答性を向上させることができる。
【0130】
以上、本発明の車両用制動制御装置を実施例1〜2に基づき説明してきたが、具体的な構成については、これらの実施例に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0131】
実施例1〜2では、ストロークセンサ18として摺動型のセンサを用いる例を示した。しかし、これは、別の種類のセンサ、例えば、ストロークの変動による磁場変化を電気信号に変換して検出する、ホール素子を用いた非接触型のセンサを用いてもよい。
このように、非接触型のストロークセンサを用いたときには、摺動ノイズの発生は抑えられるが、車両環境特有の高周波ノイズや、ブレーキペダル1の揺らぎや車両の振動によるノイズが混入する可能性があるため、上記した実施例1〜2と同様に、ノイズ低減効果を発揮できる。
【0132】
実施例1〜2では、図7(1)、(2)に示した、ペダルストローク量と、目標マスターシリンダ圧力との関係、および、所定のペダルストローク量を与えたときに計測されるマスターシリンダ圧力と、そのときのマスターシリンダ圧力を目標マスターシリンダ圧力に変換するための補正係数との関係、を利用して、マスターシリンダ圧力Mc(t)を補正する例を示した。
しかし、マスターシリンダ圧力Mc(t)の補正方法は、この方法に限定されるものではない。
すなわち、マスターシリンダ圧力の補正は、所定のペダルストローク量を与えたときの目標マスターシリンダ圧力と、実際に計測されたマスターシリンダ圧力との差分値に応じた量だけ、マスターシリンダ圧力を補正するようにしてもよい。
【0133】
実施例1では、倍力装置指令値Mx(t)の所定時間内での偏差ΔMx(t)を算出し、偏差が所定値以上であるときには、過渡制動状態であると判定し、偏差が所定値未満であるときには、定常制動状態であると判定する例を示した。
しかし、制動状態の判定方法はこれに限定されるものではなく、倍力装置指令値Mx(t)が所定値α未満となった場合には、所定値β以上となるまで定常制動状態であると判定して、所定値β以上となった場合には、過渡制動状態であると判定するようにしてもよい。
【0134】
実施例1では、倍力装置指令値Mx(t)に対するペダルストローク量S(t)に基づく第2倍力装置指令値の寄与度ωを、図6(3)に示す特性に設定した。
この寄与度ωの設定例は、一例として示したものであり、これ以外の特性を設定することもできる。
【0135】
実施例2では、ペダルストローク量S(t)、およびマスターシリンダ圧力Mc(t)の所定時間内での偏差ΔS(t)、ΔMc(t)を算出し、偏差ΔS(t)、ΔMc(t)のいずれか一方が所定値以上であるときには過渡制動状態であると判定し、偏差ΔS(t)、ΔMc(t)がともに所定値未満であるときには、定常制動状態であると判定する例を示した。
しかし、制動状態の判定方法はこれに限定されるものではなく、ペダルストローク量S(t)、およびマスターシリンダ圧力Mc(t)の少なくとも一方が、所定値θ未満となった場合には、所定値γ以上となるまで定常制動状態であると判定して、所定値γ以上となった場合には、過渡制動状態であると判定するようにしてもよい。
【0136】
実施例1〜2では、本発明の車両用制動力制御装置を、電動車両の制動装置に適用する例を示した。
しかし、本発明の車両用制動力制御装置は、エンジンを原動機とする車両に対しても適用することができる。また、エンジンと電動モータを併用するハイブリッド車両の制動装置に対しても適用することができる。
【符号の説明】
【0137】
1 ブレーキペダル
2 電動ブースタ(倍力装置)
3 マスターシリンダ
4 ブレーキ液圧アクチュエータ
5FL、5FR、5RL、5RR ホイールシリンダ
6 ブレーキコントローラ
7 モータ駆動回路
9 インプットロッド
10 電動モータ
11 プライマリピストン(マスターシリンダピストン)
13 バネ
18 ストロークセンサ(ストローク量検出手段)
19 マスターシリンダ圧力センサ(マスターシリンダ圧力検出手段)
20 モータレゾルバ
60 外部入力信号検出部
61 倍力装置指令値演算部(倍力装置指令値演算手段)
62 ドライバ制動状態判定部(ドライバ制動状態判定手段)
63 倍力装置指令値平滑化処理部(平滑化処理手段)
【技術分野】
【0001】
本発明は、電動車両等に適用され、ブレーキ操作時に、ペダル踏力のアシスト力を倍力装置により得る車両用制動力制御装置に関する。
【背景技術】
【0002】
従来、マスターシリンダ圧力から目標制動力を演算し、この目標制動力を平滑化して、制動制御を行う車両用制動力制御装置が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平11−115738号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の車両用制動力制御装置にあっては、ブレーキフィーリングを向上させるために、マスターシリンダ圧力を平滑化して目標制動力を演算していた。ところが、ブレーキフィーリングには、マスターシリンダ圧力のみならず、ブレーキペダルのペダルストローク量も関係している。したがって、ペダルストローク量にノイズが混入して振動状態になると、この振動状態がブレーキフィーリングに反映されるため、ブレーキフィーリングが悪化してしまうという問題があった。
【0005】
本発明は、上記問題に着目してなされたもので、ペダルストローク量にノイズが混入しても、ブレーキフィーリングが悪化しない車両用制動力制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、本発明の車両用制動力制御装置は、ブレーキペダルと、倍力装置と、マスターシリンダと、ストローク量検出手段と、マスターシリンダ圧力検出部と、倍力装置指令値演算手段と、平滑化処理手段と、を備える手段とした。
【0007】
前記ブレーキペダルは、ブレーキ操作時に、ドライバのペダル踏力を加える。
前記倍力装置は、前記ペダル踏力にアシスト推力を加える。
前記マスターシリンダは、前記ペダル踏力をインプットロッドからバネを介してマスタ
ーシリンダピストンへ入力し、前記ペダル踏力に前記倍力装置によるアシスト推力を加え、各輪に設けられたホイールシリンダへ導くマスターシリンダ圧力を発生させる。
前記ストローク量検出手段は、ブレーキ操作時の、ブレーキペダルのペダルストローク量を検出する。
前記マスターシリンダ圧力検出手段は、前記マスターシリンダ圧力を検出する。
前記倍力装置指令値演算手段は、前記ストローク量検出手段で検出されたブレーキペダルのペダルストローク量と、前記マスターシリンダ圧力検出手段で検出されたマスターシリンダ圧力の少なくとも2つの値に基づいて倍力装置指令値を演算する。
前記平滑化処理手段は、前記倍力装置指令値演算手段によって演算された前記動作量に平滑化処理を施して、前記倍力装置の動作量とする。
【発明の効果】
【0008】
よって、ブレーキ操作時に、ストローク量検出手段で検出されたブレーキペダルのペダルストローク量と、マスターシリンダ圧力検出手段で検出されたマスターシリンダ圧力と、に基づいて、倍力装置指令値演算手段によって倍力装置指令値を演算し、この演算された倍力装置指令値に、平滑化処理手段によって平滑化処理を施して、倍力装置の動作量とすることによって、ブレーキペダルのペダルストローク量に混入したノイズが、平滑化処理手段における平滑化処理によって低減される。
この結果、ペダルストローク量にノイズが混入したときであっても、ブレーキフィーリングの悪化を防止することができる。
【図面の簡単な説明】
【0009】
【図1】実施例1の車両用制動力制御装置の全体構成を示す全体システム図である。
【図2】実施例1のブレーキコントローラの要部構成を示すソフトウェアブロック図である。
【図3】実施例1のブレーキコントローラの倍力装置指令値演算部の詳細構成を示す制御ブロック図である。
【図4】実施例1のブレーキコントローラで実行される倍力装置指令値演算処理の流れを示す全体フローチャートである。
【図5】図4のフローチャートにおける平滑化処理前倍力装置指令値演算処理の流れを示す詳細フローチャートである。
【図6】(1)実施例1におけるペダル踏力に対する倍力装置指令値の特性を示す特性図である。(2)実施例1におけるペダルストローク量に対する倍力装置指令値の特性を示す特性図である。(3)実施例1におけるペダル踏力に対する、ペダルストローク量に基づく第2倍力装置指令値の寄与度を示す特性図である。
【図7】(1)実施例1におけるペダルストローク量とマスターシリンダ圧力との関係を説明する特性図である。(2)実施例1におけるマスターシリンダ圧力の補正係数を説明する特性図である。
【図8】ペダルストローク量に対するマスターシリンダ圧力の関係がばらつきを持つことを説明する特性図である。
【図9】図4のフローチャートにおける平滑化処理後倍力装置指令値演算処理の流れを示す詳細フローチャートである。
【図10】実施例2の車両用制動力制御装置のブレーキコントローラの要部構成を示すソフトウェアブロック図である。
【図11】実施例2のブレーキコントローラで実行される倍力装置指令値演算処理の流れを示すデータフロー図である。
【発明を実施するための形態】
【0010】
以下、本発明の車両用制動力制御装置を実現する最良の形態を、図面に示す実施例1および実施例2に基づいて説明する。
【実施例1】
【0011】
実施例1は、本発明の車両用制動力制御装置を、電動モータを原動機とする電動車両の制動装置に適用した例である。
【0012】
[全体構成]
図1は、実施例1の車両用制動力制御装置の全体構成を示す全体システム図である。以下、図1に基づき、全体構成を説明する。
【0013】
実施例1の車両用制動力制御装置は、図1に示すように、ブレーキペダル1と、電動ブースタ(倍力装置)2と、マスターシリンダ3と、ブレーキ液圧アクチュエータ4と、ホイールシリンダ5FL、5FR、5RL、5RRと、ブレーキコントローラ6と、モータ駆動回路7と、を備えている。
【0014】
前記ブレーキペダル1は、ブレーキ操作時、ドライバのペダル踏力を加える。このブレーキペダル1の上端部は、車体に対して回動可能に支持されていて、ブレーキペダル1の中程部は、クレビスピン8を介してインプットロッド9に連結されている。
【0015】
前記電動ブースタ2は、ペダル踏力を電動モータ10の推力によりアシストする。この電動ブースタ2は、電動モータ10によるモータトルクを、ボールねじ等でアシスト推力に変換し、アシスト推力をプライマリピストン11(マスターシリンダピストン)に作用させる。電動ブースタ2は、マスターシリンダ3と共に、ダッシュパネル12に固定される。
【0016】
前記マスターシリンダ3は、ペダル踏力に電動モータ10によるアシスト推力を加え、
各輪に設けられたホイールシリンダ5FL、5FR、5RL、5RRへ導くマスターシリンダ圧力(プライマリ圧力、セカンダリ圧力)を発生させる。
【0017】
前記マスターシリンダ3は、インプットロッド9に加えられるペダル踏力を、一対のバネ13,13を介して入力するプライマリピストン11と、プライマリピストン11に一体連結されたセカンダリピストン14と、を有する。
【0018】
前記プライマリピストン11のピストンストロークにより作り出されたプライマリ圧力は、プライマリ圧管15を介してブレーキ液圧アクチュエータ4に導かれる。セカンダリピストン14のピストンストロークにより作り出されたセカンダリ圧力は、セカンダリ圧管16を介してブレーキ液圧アクチュエータ4に導かれる。
【0019】
前記ブレーキ液圧アクチュエータ4は、通常のブレーキ操作時には、プライマリ圧管15とセカンダリ圧管16を介して導かれたマスターシリンダ圧力を、そのまま各ホイールシリンダ5FL、5FR、5RL、5RRへと導く。
【0020】
なお、ブレーキ操作を伴うABS制御時には、マスターシリンダ圧力を減圧/保持/増圧した油圧を、各ホイールシリンダ5FL、5FR、5RL、5RRへと導く。また、ブレーキ操作を伴わないVDC制御時やTCS制御時には、電動ポンプによるポンプ圧に基づく制御油圧を、各ホイールシリンダ5FL、5FR、5RL、5RRのうち、制動力を必要とするホイールシリンダへと導く。
【0021】
前記ホイールシリンダ5FL、5FR、5RL、5RRは、各輪のブレーキ装置の位置に設けられ、ホイールシリンダ圧管17FL、17FR、17RL、17RRを介して導かれるホイールシリンダ圧に応じた制動力を各輪に与える。
【0022】
前記ブレーキコントローラ6は、マイクロコンピュータで構成され、予め実装されたソフトウェアの機能を実現する。
前記ブレーキコントローラ6は、複数の機能を実装しており、具体的には、後述するセンサから出力されて、ブレーキコントローラ6に入力された信号を検出する外部入力信号検出部60と、ブレーキ操作時に、マスターシリンダ圧力Mc(t)とペダルストローク量S(t)とに基づいて、目標制動力を発生させるための倍力装置指令値を演算する倍力装置指令値演算部61(倍力装置指令値演算手段)と、演算された倍力装置指令値に基づいてドライバの制動操作の状態を判定するドライバ制動状態判定部62(ドライバ制動状態判定手段)と、演算された倍力装置指令値を平滑化処理する倍力装置指令値平滑化処理部63(平滑化処理手段)と、を有する。
【0023】
前記ブレーキコントローラ6は、倍力装置指令値平滑化処理部63の演算結果を、モータ駆動信号としてモータ駆動回路7に出力し、目標制動力を発揮するアシスト推力を得る。
【0024】
前記ブレーキコントローラ6には、ブレーキペダル1に設けられてブレーキペダル1のペダルストローク量を検出するストロークセンサ18(ストローク量検出手段)と、マスターシリンダ圧力センサ19(マスターシリンダ圧力検出手段)と、電動モータ10の回転角を検出するモータレゾルバ20と、他のセンサ・スイッチ類21からの検出情報が入力される。
【0025】
前記他のセンサ・スイッチ類21からの検出情報としては、例えば、温度センサや回転数センサなどによる検出情報が用いられ、倍力装置指令値がより詳細に演算されるが、本実施例では、ストロークセンサ18と、マスターシリンダ圧力センサ19の出力のみに限定して説明を進める。
【0026】
前記ストロークセンサ18は、ブレーキペダル1のペダルストローク量に応じた変位量を検出する変位センサであり、一般的に、抵抗体の抵抗値の変化によって変位量を検出する、所謂ポテンショメータが用いられる。
【0027】
前記モータ駆動回路7は、ブレーキコントローラ6から出力されたモータ駆動信号に応じて、バッテリー22の電源電流(電源電圧)を、電動モータ10の駆動電流(駆動電圧)に変換する。
【0028】
[制御構成]
図2は、実施例1の車両用制動力制御装置のブレーキコントローラ6に実装されて、倍力装置指令値演算処理を行うソフトウェアの構成を示すブロック図である。
以下、図2に基づき、要部構成を説明する。
【0029】
前記ブレーキコントローラ6は、図2に示すように、外部入力信号検出部60と、倍力装置指令値演算部61(倍力装置指令値演算手段)と、ドライバ制動状態判定部62(ドライバ制動状態判定手段)と、倍力装置指令値平滑化処理部63(平滑化処理手段)と、を備えている。
【0030】
前記外部入力信号検出部60は、ストロークセンサ18(ストローク量検出手段)やマスターシリンダ圧力センサ19(マスターシリンダ圧力検出部)などの外部センサから出力されて、ブレーキコントローラ6に入力された信号を検出する。
【0031】
前記倍力装置指令値演算部61は、外部入力信号検出部60において検出された信号に基づいて、倍力装置2に指令して所定の制動力を得るための倍力装置指令値を演算する。
【0032】
前記ドライバ制動状態判定部62は、倍力装置指令値演算部61において演算された倍力装置指令値に基づいて、ドライバの制動操作の状態を判定する。
【0033】
前記倍力装置指令値平滑化処理部63は、前記ドライバ制動状態判定部62において判定されたドライバの制動操作の状態に応じた平滑化処理係数を設定して、この平滑化処理係数に基づいて、倍力装置指令値演算部61において演算された倍力装置指令値を平滑化処理する。
【0034】
次に、倍力装置指令値演算部61の詳細構成を説明する。
図3は、倍力装置指令値演算部61の詳細構成を示す制御ブロック図である。
【0035】
前記倍力装置指令値演算部61は、図3に示すように、マスターシリンダ圧力補正部610と、ペダル踏力算出部611と、第1倍力装置指令値算出部612と、第2倍力装置指令値算出部613と、寄与度設定部614と、第1倍力装置指令値寄与度算出部615と、第1倍力装置指令値分算出部616と、第2倍力装置指令値分算出部617と、倍力装置指令値算出部618と、を備えている。
【0036】
前記マスターシリンダ圧力補正部610は、外部入力信号検出部60において検出されたマスターシリンダ圧力を補正する。
【0037】
前記ペダル踏力算出部611は、マスターシリンダ圧力に基づいて、ブレーキペダル1へのペダル踏力を算出する。
【0038】
前記第1倍力装置指令値算出部612は、ペダル踏力算出部611で算出されたペダル踏力に基づく第1倍力装置指令値を算出する。
【0039】
前記第2倍力装置指令値算出部613は、ストロークセンサ18で検出されたペダルストローク量に基づく第2倍力装置指令値を算出する。
【0040】
前記寄与度設定部614は、ペダル踏力算出部611で算出されたペダル踏力に基づいて、倍力装置指令値に対するペダルストローク量に基づく第2倍力装置指令値の寄与度ωを設定する。
【0041】
前記第1倍力装置指令値寄与度算出部615は、ペダル踏力に基づく第1倍力装置指令値の寄与度を算出する。
【0042】
前記第1倍力装置指令値分算出部616は、ペダル踏力に基づく第1倍力装置指令値分を算出する。
【0043】
前記第2倍力装置指令値分算出部617は、ペダルストローク量に基づく第2倍力装置指令値分を算出する。
【0044】
前記倍力装置指令値算出部618は、倍力装置指令値を算出する。
【0045】
[フロー構成]
図4は、実施例1のブレーキコントローラ6において実行される倍力装置指令値演算処理の流れを示す。
【0046】
ステップS401では、外部入力信号検出部60において、ストロークセンサ18からペダルストローク量を検出して、マスターシリンダ圧力センサ19からマスターシリンダ圧力を検出して、倍力装置指令値演算部61に入力する。
【0047】
以後、時刻tにおけるペダルストローク量をS(t)で表し、時刻tにおけるマスターシリンダ圧力をMc(t)で表す。
【0048】
ステップS402では、倍力装置指令値演算部61において、倍力装置指令値を算出する演算を行う。
倍力装置指令値の算出方法については後述する。
以後、時刻tにおける倍力装置指令値をMx(t)で表す。
【0049】
ステップS403では、ドライバ制動状態判定部62において、ドライバ制動状態の判定を行う。
このドライバ制動状態の判定は、倍力装置指令値Mx(t)の所定時間Δt内での偏差ΔMx(t)=Mx(t)−Mx(t−Δt)に基づいて行う。ここで、Δtは倍力装置指令値を演算する演算周期であり、例えば、Δt=10msecの値をとる。
【0050】
倍力装置指令値の所定時間内での偏差ΔMx(t)が所定値以上である場合を過渡制動状態とみなし、倍力装置指令値の所定時間内での偏差ΔMx(t)が所定値未満である場合を定常制動状態とみなす。
【0051】
ステップS404では、ステップS402で演算された倍力装置指令値Mx(t)と、ステップS403で判定されたドライバ制動状態と、に基づいて、倍力装置指令値平滑化処理部63において、平滑化された倍力装置指令値(平滑化倍力装置指令値)を算出する演算を行う。
平滑化倍力装置指令値の算出方法については後述する。
以後、平滑化された倍力装置指令値(平滑化倍力装置指令値)をNx(t)で表す。
【0052】
以下、ステップS402で行われる倍力装置指令値Mx(t)の算出方法について、図5を用いて説明する。
【0053】
ステップS501では、外部入力信号検出部60に入力された、マスターシリンダ圧力Mc(t)の値が、マスターシリンダ圧力補正部610に読み込まれる。
【0054】
ステップS502では、マスターシリンダ圧力補正部610において、マスターシリンダ圧力Mc(t)の補正を行う。
マスターシリンダ圧力Mc(t)の補正方法については後述する。
【0055】
ステップS503では、ペダル踏力算出部611が、次の(式1)によって算出されるインプットロッド入力をペダル踏力として算出する。
以後、インプットロッド入力(ペダル踏力)をFi(t)で表す。
インプットロッド入力(Fi(t))=マスターシリンダ圧力(Mc(t))×インプットロッド面積(Ai)+バネ定数(K)×インプットロッドとマスターシリンダピストンとの相対変位量(Δx(t)) (式1)
ここで、インプットロッド9のインプットロッド面積(Ai)と一対のバネ13、13によるバネ定数(K)とは、既知の固定値である。
マスターシリンダ圧力(Mc(t))は、マスターシリンダ圧力センサ19から取得する。
相対変位量(Δx(t))は、ストロークセンサ18によりインプットロッド9の位置情報を取得し、マスターシリンダピストン11の位置情報をモータレゾルバ20から取得したモータ回転位置から推定する。
そして、インプットロッド9の位置と、マスターシリンダピストン11の位置と、の差を相対変位量(Δx(t))とする。
【0056】
ステップS504では、第1倍力装置指令値算出部612において、ペダル踏力算出部611で算出されたペダル踏力Fi(t)に基づいて、実験等を行って予め作成して第1倍力装置指令値算出部612に格納されている、ペダル踏力Fi(t)に対する倍力装置指令値Mx(t)の特性を用いて、ペダル踏力に基づく第1倍力装置指令値を算出する。
ペダル踏力Fi(t)に対する倍力装置指令値Mx(t)の特性の1例を、図6(1)に示す。
【0057】
ステップS505では、第2倍力装置指令値算出部613において、ストロークセンサ18で検出されたペダルストローク量S(t)に基づいて、実験等を行って予め作成して第2倍力装置指令値算出部613に格納されている、ペダルストローク量S(t)に対する倍力装置指令値Mx(t)の特性を用いて、ペダルストローク量に基づく第2倍力装置指令値を算出する。
ペダルストローク量S(t)に対する倍力装置指令値Mx(t)の特性の1例を、図6(2)に示す。
【0058】
ステップS506では、寄与度設定部614において、実験等を行って予め作成して寄与度設定部614に格納されている、倍力装置指令値に対するペダル踏力の寄与度を表す特性を用いて、ペダル踏力算出部611で算出したペダル踏力Fi(t)に応じた、倍力装置指令値Mx(t)に対するペダルストローク量に基づく第2倍力装置指令値の寄与度ωを設定する。
倍力装置指令値に対するペダル踏力の寄与度を表す特性の1例を、図6(3)に示す。
【0059】
図6(3)では、ペダル踏力Fi(t)が0〜F1までの領域において、ペダルストローク量S(t)に基づく第2倍力装置指令値の寄与度ωを小さな一定値に設定する。ペダル踏力Fi(t)がF2を超える領域において、ペダルストローク量S(t)に基づく第2倍力装置指令値の寄与度ωを大きな一定値に設定する。そして、ペダル踏力Fi(t)がF1〜F2の領域において、ペダルストローク量S(t)に基づく第2倍力装置指令値の寄与度ωを小さな一定値から大きな一定値まで徐々に変化する値に設定する。
【0060】
ステップS507では、第1倍力装置指令値寄与度算出部615において、(1−ω)の式により、ペダル踏力に基づく第1倍力装置指令値の寄与度を算出する。
【0061】
ステップS508では、第1倍力装置指令値分算出部616において、第1倍力装置指令値算出部612で算出されたペダル踏力Fi(t)に基づく第1倍力装置指令値と、第1倍力装置指令値寄与度算出部615で設定されたペダル踏力Fi(t)に基づく第1倍力装置指令値の寄与度(1−ω)と、を掛け合わせて、ペダル踏力に基づく第1倍力装置指令値分を算出する。
【0062】
ステップS509では、第2倍力装置指令値分算出部617において、第2倍力装置指令値算出部613で算出されたペダルストローク量S(t)に基づく第2倍力装置指令値と、寄与度設定部614で設定されたペダルストローク量S(t)に基づく第2倍力装置指令値の寄与度ωと、を掛け合わせて、ペダルストローク量S(t)に基づく第2倍力装置指令値分を算出する。
【0063】
ステップS510では、倍力装置指令値算出部618において、第1倍力装置指令値分算出部616で算出されたペダル踏力Fi(t)に基づく第1倍力装置指令値分と、第2倍力装置指令値分算出部617で算出されたペダルストローク量S(t)に基づく第2倍力装置指令値分と、を加算して、倍力装置指令値Mx(t)を算出する。
【0064】
次に、作用を説明する。
まず、「比較例の制動力制御の課題」の説明を行う。続いて、実施例1の車両用制動力制御装置における作用を、「目標制動力演算作用」、「ドライバ制動状態判定作用」、「ドライバ制動状態に応じた平滑化処理作用」に分けて説明する。
【0065】
[比較例の課題]
特開平11−115738号公報に記載されている技術を比較例とする。
この比較例では、所要制動トルク対応量(本願発明の目標制動力に対応する)を検出している。そして、検出された所要制動トルク対応量(マスターシリンダ圧力)に対して平滑化処理を行い、この平滑化処理された信号に基づいて制動力を制御している。
【0066】
比較例に記載されている技術にあっては、検出された1つの信号(マスターシリンダ圧力)に対して平滑化処理を行い、この平滑化処理された信号に基づいて制動力を制御している。
【0067】
したがって、平滑化処理に用いたマスターシリンダ圧力以外の信号のうち、ブレーキフィーリングに影響を及ぼす信号、例えば、ブレーキペダルのペダルストローク量S(t)にノイズが重畳して振動状態になると、ブレーキフィーリングが悪化してしまうという課題があった。
【0068】
ペダルストローク量を検出するストロークセンサ18は、ブレーキペダルの踏み込みに伴って発生する摺動子の摺動量を、抵抗値の変化として検出する構成になっている。
したがって、ブレーキペダルを踏み込んだときには、摺動子の摺動という機械的な接触が発生するため、その構成上、摺動ノイズの発生を避けることはできない。
【0069】
さらに、ブレーキペダル1を踏み込んだときには、ブレーキペダル1の揺らぎや車両の振動などによって摺動子が振動するため、振動状態のノイズが発生して、このノイズがストロークセンサ18の出力に混入する。また、ストロークセンサ18には、車両環境特有の高周波ノイズも混入する。
【0070】
この結果、ドライバがブレーキペダル1を踏み込んだときには、ストロークセンサ18から出力されるペダルストローク量S(t)には、様々なノイズが重畳される。そして、これらのノイズの混入によって、ブレーキフィーリングが悪化してしまう。
【0071】
さらに、マスターシリンダ圧力Mc(t)にも、外乱によってノイズが混入する可能性がある。
【0072】
[目標制動力演算作用]
ブレーキフィーリングを悪化させないため、ストロークセンサ18で検出したペダルストローク量S(t)に混入したノイズや、マスターシリンダ圧力Mc(t)に混入したノイズを低減することが必要である。
以下、これを反映する作用を説明する。
【0073】
まず、前記したステップS502で行われるマスターシリンダ圧力Mc(t)の補正方法について、図7(1)、(2)、および図8を用いて説明する。
図7(1)は、ストロークセンサ18の出力と、ブレーキペダル1が所定のペダルストローク量で踏み込まれたときに、マスターシリンダ3に発生させるべき目標マスターシリンダ圧力(目標制動力)との関係を示す特性図である。この特性図は、実験等を行って予め作成して、倍力装置指令値演算部61に格納しておく。
ペダルストローク量が小さい領域Pでは、ペダルストローク量に対して目標マスターシリンダ圧力は2次曲線的に増加する。
ペダルストローク量が大きい領域Qでは、ペダルストローク量に対して目標マスターシリンダ圧力は線形に増加する。
【0074】
ブレーキペダル1をペダルストローク量S(t)=Saで踏み込んだときに発生するマスターシリンダ圧力Mc(t)=Maは、図8に示すように、部品のばらつき、エア混入、ブレーキキャリパのノックバック、等を原因として、設計中央値とは異なる関係となることがある。
つまり、ペダルストローク量に対してマスターシリンダ圧力が設計中央値より高くなる「ばらつきX」やペダルストローク量に対してマスターシリンダ圧力が設計中央値より低くなる「ばらつきY」が発生する。
このため、同じペダルストローク量に対して、図8に示すように、範囲Zに亘って、マスターシリンダ圧力のばらつきが発生する。
したがって、所定のマスターシリンダ圧力を出すためには、検出されたマスターシリンダ圧力を補正する必要がある。
【0075】
図7(2)は、マスターシリンダ圧力の補正を行うために、予め実験等によって求めた、補正係数kの特性図である。この特性図は、予め倍力装置指令値演算部61に格納しておき、倍力装置指令値を演算する際に読み出されて使用される。
【0076】
図7(2)は、ブレーキペダル1がペダルストローク量S(t)=Saで踏み込まれたときに、マスターシリンダ圧力センサ19で、実際に測定されたマスターシリンダ圧力Mc(t)=Mbを、ペダルストローク量がSaであるときの目標マスターシリンダ圧力Ma0と等しくなるように補正するための補正係数がk(=Ma0/Mb)であることを示している。
【0077】
図7(2)において、ペダルストローク量が小さい領域Pでは、マスターシリンダ圧力はペダルストローク量に対して2次曲線的に増加する特性を有するため、補正係数kは、マスターシリンダ圧力に対して線形に増加する特性を有する。
【0078】
さらに、ペダルストローク量が大きい領域Qでは、マスターシリンダ圧力はペダルストローク量に対して線形に増加する特性を有するため、補正係数kは、マスターシリンダ圧力によらずに一定になる。
【0079】
前記したステップS502では、読み込まれたマスターシリンダ圧力Mc(t)=Mbの値に応じた補正係数kの値を図7(2)の特性図から読み取って、読み取られた補正係数kと、計測されたマスターシリンダ圧力Mbと、を積算して、補正されたマスターシリンダ圧力Mc(t)=kMbを算出する。
【0080】
次に、前記したステップS404で行われる平滑化処理後倍力装置指令値演算処理の流れを、図9に示すフローチャートを用いて説明する。
【0081】
ステップS901では、倍力装置指令値演算部61によって演算された倍力装置指令値Mx(t)が取得され、ステップS902に進む。
【0082】
ステップS902では、ドライバ制動状態判定部62において行われたドライバ制動状態の判定結果が取得され、ステップS903に進む。
【0083】
ステップS903では、取得したドライバ制動状態の判定結果に基づいて、ドライバ制動状態が定常制動状態であるか否かが判定される。
ステップS903がYesのとき、すなわちドライバ制動状態が定常制動状態であるときには、ステップS904に進み、ステップS903がNoのとき、すなわちドライバ制動状態が過渡制動状態であるときには、ステップS905に進む。
【0084】
ステップS904では、倍力装置指令値平滑化処理部63が、平滑化処理係数Bを設定する処理を行い、ステップS906に進む。
平滑化処理係数Bの設定方法については、後述する。
【0085】
ステップS905では、倍力装置指令値平滑化処理部63が、平滑化処理係数Bに対して、倍力装置指令値Mx(t)の波形をより平滑化することができる(平滑化効果が高い)、平滑化処理係数Aを設定する処理を行い、ステップS906に進む。
平滑化処理係数Aの設定方法については、後述する。
【0086】
ステップS906では、倍力装置指令値平滑化処理部63において、ステップS904で算出された平滑化処理係数B、またはステップS905で算出された平滑化処理係数Aと、倍力装置指令値Mx(t)との積和演算を行って、平滑化倍力装置指令値Nx(t)が演算される。
【0087】
ステップS903から、ステップS904を経てステップS906に進んだときには、次の(式2)によって平滑化倍力装置指令値Nx(t)が演算される。
Nx(t)=B×Mx(t)+(1−B)×Mx(t−Δt) (式2)
【0088】
また、ステップS903から、ステップS905を経てステップS906に進んだときには、次の(式3)によって平滑化倍力装置指令値Nx(t)が演算される。
Nx(t)=A×Mx(t)+(1−A)×Mx(t-Δt) (式3)
【0089】
ステップS906において演算された、平滑化倍力装置指令値Nx(t)は、モータ駆動信号としてモータ駆動回路7に与えられ、モータ駆動回路7において、バッテリー22の電源電流(電源電圧)を電動モータ10の駆動電流(駆動電圧)に変換する。
【0090】
変換された電動モータ10の駆動電圧は、電動モータ10に印加されて、電動モータ10に、駆動電圧に応じたトルクを発生させて、目標制動力を発揮するアシスト推力を得る。
【0091】
次に、ステップS904で行う平滑化処理係数Bの設定方法と、S905で行う平滑化処理係数Aの設定方法について説明する。
倍力装置指令値Mx(t)の平滑化処理とは、異なる複数の時刻に出力された倍力装置指令値Mx(t)とMx(t−Δt)に、それぞれ、合計値が1になるような平滑化処理係数を掛けて総和を求め、こうして演算された値を、新たに時刻tにおける平滑化倍力装置指令値Nx(t)とする処理を行うことである。
【0092】
平滑化処理係数の値は、平滑化時定数の値に基づいて決められ、長い平滑化時定数に基づいて決められた平滑化処理係数を用いると、平滑化効果が高くなって、倍力装置指令値Mx(t)の変動量を小さく抑えることができる。
一方、短い平滑化時定数に基づいて決められた平滑化処理係数を用いると、平滑化効果は低くなるが、倍力装置指令値Mx(t)の応答性が高くなる。
【0093】
本実施例では、平滑化処理係数を設定する際に、異なる2種類の平滑化時定数TA、TBを適用する。ここで、TAとTBとは、TA>TBの関係にあるものとする。
【0094】
平滑化時定数をTAにしたときの平滑化処理係数Aは、演算周期をΔtとすると、次の(式4)で表される。
A=1−exp(−Δt/TA) (式4)
【0095】
また、平滑化時定数をTBにしたときの平滑化処理係数Bは、次の(式5)で表される。
B=1−exp(−Δt/TB) (式5)
【0096】
ステップS904では(式5)によって平滑化処理係数Bが算出され、ステップS905では(式4)によって平滑化処理係数Aが算出される。
【0097】
上記したように、実施例1では、倍力装置指令値演算手段61が、ストローク量検出手段18で検出されたブレーキペダル1のペダルストローク量S(t)と、マスターシリンダ圧力検出手段19で検出されたマスターシリンダ圧力Mc(t)の少なくとも2つの値に基づいて、倍力装置指令値Mx(t)を演算して、平滑化処理手段63が、倍力装置指令値演算手段61において演算された倍力装置指令値に平滑化処理を施して、平滑化された倍力装置指令値Nx(t)を算出して、この平滑化された倍力装置指令値Nx(t)を倍力装置2の動作量とする構成を採用した。
【0098】
したがって、ノイズを含むペダルストローク量S(t)やマスターシリンダ圧力Mc(t)に基づいて演算された倍力装置指令値Mx(t)に平滑化処理が施されるため、倍力装置指令値に含まれるノイズが低減される。
このため、ノイズが混入したときであっても、倍力装置2の動作量の変動が小さくなって、ブレーキフィーリングの悪化を防止することができる。
【0099】
[ドライバ制動状態判定作用]
ドライバの制動状態によらずに、ブレーキフィーリングの悪化を防止する必要がある。以下、これを反映する作用を説明する。
【0100】
上記したように、実施例1では、ドライバ制動状態判定部62において、倍力装置指令値Mx(t)の所定時間内での偏差ΔMx(t)が所定値以上である場合を過渡制動状態とみなし、倍力装置指令値Mx(t)の所定時間内での偏差ΔMx(t)が所定値未満である場合を定常制動状態とみなして、倍力装置指令値平滑化処理部63が、倍力装置指令値に対して、ドライバ制動状態に応じた平滑化効果を有する平滑化処理を行う構成を採用した。
【0101】
したがって、過渡制動状態と定常制動状態の両方において、倍力装置指令値を適切に平滑化することができる。
このため、ドライバの制動状態によらずに、倍力装置指令値に含まれるノイズを低減することができ、これによって、ドライバの制動状態にかかわらず、ブレーキフィーリングの悪化を防止することができる。
【0102】
[ドライバ制動状態に応じた平滑化処理作用]
ストロークセンサ18から発生する摺動ノイズは、一般に、ペダルストローク量S(t)が一定である定常制動状態よりも、ペダルストローク量S(t)の変化量が大きい、ブレーキペダル1の踏み込み時(過渡制動状態)に大きくなる。
したがって、ノイズが多い過渡制動状態において、倍力装置指令値Mx(t)のノイズを効果的に低減するため、過渡制動状態において、定常制動状態よりも平滑化効果を高くすることが必要である。
以下、これを反映する作用を説明する。
【0103】
上記したように、実施例1では、ドライバ制動状態判定部62において、倍力装置指令値Mx(t)の所定時間内での偏差ΔMx(t)が所定値以上である場合を過渡制動状態とみなし、倍力装置指令値Mx(t)の所定時間内での偏差ΔMx(t)が所定値未満である場合を定常制動状態とみなして、倍力装置指令値平滑化処理部63が、ドライバ制動状態が過渡制動状態であるときには、定常制動状態であるときよりも平滑化効果が高い平滑化処理を行う構成を採用した。
【0104】
したがって、倍力装置指令値Mx(t)の平滑化効果が、過渡制動状態において、定常制動状態よりも高く設定されるため、過渡制動状態において、ノイズの影響による倍力装置指令値Mx(t)の変動を低減することができる。このため、高いノイズ低減効果が得られる。
【0105】
次に、効果を説明する。
実施例1の車両用制動力制御装置にあっては、下記に列挙する効果を得ることができる。
【0106】
(1)ブレーキ操作時に、ドライバのペダル踏力を加えるブレーキペダル1と、
前記ペダル踏力にアシスト推力を加える倍力装置2と、
前記ペダル踏力をインプットロッド9からバネ13を介してマスターシリンダピストン11へ入力し、前記ペダル踏力に前記倍力装置2によるアシスト推力を加え、各輪に設けられたホイールシリンダ5FL、5FR、5RL、5RRへ導くマスターシリンダ圧力を発生させるマスターシリンダ3と、
ブレーキ操作時の、ブレーキペダル1のペダルストローク量を検出するストローク量検出手段18と、前記マスターシリンダ圧力を検出するマスターシリンダ圧力検出手段19と、
前記ストローク量検出手段18で検出されたブレーキペダルのストローク量と、前記マスターシリンダ圧力検出手段19で検出されたマスターシリンダ圧力の少なくとも2つの値に基づいて、前記倍力装置2の動作量を演算する倍力装置指令値演算手段61と、
前記倍力装置指令値演算手段61において演算された前記動作量に平滑化処理を施して、前記倍力装置の動作量とする平滑化処理手段63と、
を備える。
このため、ブレーキペダルのペダルストローク量にノイズが混入したときであっても、ブレーキフィーリングの悪化を防止することができる。
【0107】
(2)ドライバの要求する制動状態を判定するドライバ制動状態判定手段62を有し、平滑化処理手段63において、ドライバ制動状態判定手段62で判定された制動状態に基づいた平滑化処理を行う。
このため、(1)の効果に加え、ドライバの制動状態に応じて適切な制動応答を実現して、ブレーキフィーリングを一層向上させることができる。
【0108】
(3)ドライバ制動状態判定手段62は、倍力装置の動作量の変化量が所定値以上であるときを過渡制動状態と判定し、倍力装置の動作量の変化量が所定値未満であるときを定常制動状態と判定する。
このため、(1)、(2)の効果に加え、センサのばらつきやノイズの混入状態によらずに、ブレーキフィーリングを向上させることができる。
【0109】
(4)ドライバの制動状態が過渡制動状態と判定されたときには、定常制動状態と判定されたときに対して、平滑化処理手段63において、平滑化効果が高い平滑化処理を行う。
このため、(1)〜(3)の効果に加え、過渡制動状態にあるときには、倍力装置指令値がより滑らかに平滑化されることによって、倍力装置指令値Mx(t)の波形が滑らかになってノイズ低減効果が高くなる。一方、定常制動状態にあるときには、倍力装置指令値の平滑化度合いが小さいため、倍力装置指令値Mx(t)の元の波形が維持されて、応答性が高くなる。
したがって、ドライバの制動状態に応じた適切な制動応答が実現されて、ブレーキフィーリングをより一層向上させることができる。
【実施例2】
【0110】
実施例2は、ドライバ制動状態判定手段62が、ペダルストローク量S(t)とマスターシリンダ圧力Mc(t)のうち、少なくとも一方の、所定時間内での偏差が所定値以上であるときを過渡制動状態と判定し、所定時間内での偏差がともに所定値未満であるときを定常制動状態と判定するようにした例である。
【0111】
[全体構成]
実施例2の全体構成は、ブレーキコントローラ6の要部構成を除いて、実施例1の図1と同様であるため、図示を省略する。
図10は、実施例2の車両用制動力制御装置のブレーキコントローラ6の要部構成を示すソフトウェアブロック図である。以下、図10に基づいて全体構成を説明する。
なお、この倍力装置指令値を演算する処理は、例えば、10msec間隔で実行される。
【0112】
実施例2の車両用制動力制御装置が備えるブレーキコントローラ6は、ストロークセンサ18と、マスターシリンダ圧力センサ19と、から出力されて、ブレーキコントローラ6に入力された信号を検出する外部入力信号検出部60と、ブレーキ操作時に、マスターシリンダ圧力Mc(t)とペダルストローク量S(t)とに基づいて倍力装置指令値を演算する倍力装置指令値演算部61(倍力装置指令値演算手段)と、マスターシリンダ圧力Mc(t)とペダルストローク量S(t)とに基づいてドライバの制動操作の状態を判定するドライバ制動状態判定部64(ドライバ制動状態判定手段)と、演算された倍力装置指令値を平滑化処理する倍力装置指令値平滑化処理部63(平滑化処理手段)と、を有する。
【0113】
[制御構成]
図11は、実施例2の車両用制動力制御装置のブレーキコントローラ6において、倍力装置指令値演算処理を行うソフトウェアのデータフロー図である。以下、図11の各プロセスについて説明する。
【0114】
プロセスP1101では、ストロークセンサ18からペダルストローク量S(t)を外部入力信号検出部60に入力し、マスターシリンダ圧力センサ19からマスターシリンダ圧力Mc(t)を外部入力信号検出部60に入力する。
外部入力信号検出部60で検出された信号は、倍力装置指令値演算部61と、ドライバ制動状態判定部64と、に送られる。
【0115】
プロセスP1102では、ドライバ制動状態判定部64において、ドライバ制動状態の判定を行う。
【0116】
ドライバ制動状態の判定は、ペダルストローク量S(t)の所定時間Δt内での偏差ΔS(t)=S(t)―S(t―Δt)、および、マスターシリンダ圧力Mc(t)の所定時間Δt内での偏差ΔMc(t)=Mc(t)―Mc(t―Δt)に基づいて行う。
ここで、Δtは前記したように、倍力装置指令値を演算する演算周期であり、例えば、Δt=10msecの値をとる。
【0117】
ペダルストローク量S(t)の所定時間Δt内での偏差ΔS(t)、またはマスターシリンダ圧力Mc(t)の所定時間Δt内での偏差ΔMc(t)の少なくとも一方が所定値以上である場合を過渡制動状態とみなし、ペダルストローク量S(t)の所定時間Δt内での偏差ΔS(t)と、マスターシリンダ圧力Mc(t)の所定時間Δt内での偏差ΔMc(t)と、がともに所定値未満である場合を定常制動状態とみなす。
【0118】
判定された、ドライバ制動状態は、倍力装置指令値平滑化処理部63に送られる。
【0119】
プロセスP1103では、倍力装置指令値演算部61において、目標制動力を発生させるための倍力装置指令値Mx(t)を演算する。
倍力装置指令値の演算方法は、実施例1で説明した通りであるため、説明は省略する。
演算された倍力装置指令値Mx(t)は、倍力装置指令値平滑化処理部63に送られる。
【0120】
ここで、プロセスP1102におけるドライバ制動状態の判定と、プロセスP1103における倍力装置指令値Mx(t)の演算と、はお互いの出力に影響されないため、独立して実行することが可能である。
したがって、ブレーキコントローラ6を構成するハードウェアとそこに実装するソフトウェアを、並列処理を行うことができるような構成とすることによって、ドライバ制動状態の判定と、倍力装置指令値Mx(t)の演算と、を同時に実行することが可能である。なお、並列処理を行うことができる構成とは、例えば、CPUを2台実装して、各々のCPUで異なる処理を行う方法や、1台のCPUをマルチタスク処理が可能なオペレーティングシステム(OS)上で動作させることによって並列処理を行う方法などがある。
【0121】
プロセスP1104では、プロセスP1103で演算された倍力装置指令値Mx(t)と、プロセスP1102で判定されたドライバ制動状態と、に基づいて、倍力装置指令値平滑化処理部63において、平滑化倍力装置指令値Nx(t)が演算される。
【0122】
平滑化倍力装置指令値Nx(t)は、実施例1に記載した(式4)と(式5)によって演算されるため、説明は省略する。
【0123】
次に、作用を説明する。
ブレーキの応答性を上げるため、ドライバの制動状態をなるべく速く検出して、検出された制動状態に応じた平滑化処理を行って倍力装置指令値を演算することが必要である。
【0124】
以下、これを反映する作用を説明する。
上記したように、実施例2では、ドライバ制動状態判定部64が、ストローク量検出手段18で検出されたペダルストローク量S(t)と、マスターシリンダ圧力検出手段19で検出されたマスターシリンダ圧力Mc(t)の少なくとも2つの値に基づいて、ドライバの制動状態を判定する構成を採用した。
【0125】
したがって、倍力装置指令値演算部61において目標制動力を発生させるための倍力装置指令値の演算結果が出力された後で、ドライバ制動状態を判定する必要がない。
【0126】
すなわち、ドライバ制動状態は、ストローク量検出手段18で検出されたペダルストローク量S(t)と、マスターシリンダ圧力検出手段19で検出されたマスターシリンダ圧力Mc(t)に基づいて判定されるため、倍力装置指令値Mx(t)を算出する演算と、ドライバ制動状態の判定とを、並列に行うことができる。
【0127】
したがって、倍力装置指令値の演算結果が出力された後、即座に、平滑化処理手段63において平滑化演算を行うことができる。
なお、他の作用は、実施例1と同様であるので、説明を省略する。
【0128】
次に、効果を説明する。
実施例2の車両用制動力制御装置にあっては、下記の効果を得ることができる。
(5) ペダルストローク量S(t)の所定時間Δt内での偏差ΔS(t)、またはマスターシリンダ圧力Mc(t)の所定時間Δt内での偏差ΔMc(t)の少なくとも一方が所定値以上である場合を過渡制動状態とみなす。また、ペダルストローク量S(t)の所定時間Δt内での偏差ΔS(t)とマスターシリンダ圧力Mc(t)の所定時間Δt内での偏差ΔMc(t)が、ともに所定値未満である場合を定常制動状態とみなす。
そして、過渡制動状態であるときは、定常制動状態であるときに比べて、平滑化処理手段63において平滑化効果が高い平滑化処理を行う。
このため、センサの出力信号からドライバの制動状態を直接判定していることによって、センサ出力にノイズが混入したときに、より適切に対処することができる。
したがって、(1)〜(4)の効果に加え、ドライバの制動状態に応じて適切な制動応答を実現し、ブレーキフィーリングをさらに向上させることができる。
【0129】
(6)倍力装置指令値Mx(t)の演算と、ドライバ制動状態の判定とは、ブレーキコントローラ6において並列に処理することができる。
これによって、倍力装置指令値Mx(t)の演算が終了したときには、ドライバ制動状態の判定が終了しているため、倍力装置指令値Mx(t)の演算が終了してから、平滑化処理演算を開始するまでの時間を短縮することができる。
したがって、(1)〜(5)の効果に加え、制動制御の応答性を向上させることができる。
【0130】
以上、本発明の車両用制動制御装置を実施例1〜2に基づき説明してきたが、具体的な構成については、これらの実施例に限られるものではなく、特許請求の範囲の各請求項に係る発明の要旨を逸脱しない限り、設計の変更や追加等は許容される。
【0131】
実施例1〜2では、ストロークセンサ18として摺動型のセンサを用いる例を示した。しかし、これは、別の種類のセンサ、例えば、ストロークの変動による磁場変化を電気信号に変換して検出する、ホール素子を用いた非接触型のセンサを用いてもよい。
このように、非接触型のストロークセンサを用いたときには、摺動ノイズの発生は抑えられるが、車両環境特有の高周波ノイズや、ブレーキペダル1の揺らぎや車両の振動によるノイズが混入する可能性があるため、上記した実施例1〜2と同様に、ノイズ低減効果を発揮できる。
【0132】
実施例1〜2では、図7(1)、(2)に示した、ペダルストローク量と、目標マスターシリンダ圧力との関係、および、所定のペダルストローク量を与えたときに計測されるマスターシリンダ圧力と、そのときのマスターシリンダ圧力を目標マスターシリンダ圧力に変換するための補正係数との関係、を利用して、マスターシリンダ圧力Mc(t)を補正する例を示した。
しかし、マスターシリンダ圧力Mc(t)の補正方法は、この方法に限定されるものではない。
すなわち、マスターシリンダ圧力の補正は、所定のペダルストローク量を与えたときの目標マスターシリンダ圧力と、実際に計測されたマスターシリンダ圧力との差分値に応じた量だけ、マスターシリンダ圧力を補正するようにしてもよい。
【0133】
実施例1では、倍力装置指令値Mx(t)の所定時間内での偏差ΔMx(t)を算出し、偏差が所定値以上であるときには、過渡制動状態であると判定し、偏差が所定値未満であるときには、定常制動状態であると判定する例を示した。
しかし、制動状態の判定方法はこれに限定されるものではなく、倍力装置指令値Mx(t)が所定値α未満となった場合には、所定値β以上となるまで定常制動状態であると判定して、所定値β以上となった場合には、過渡制動状態であると判定するようにしてもよい。
【0134】
実施例1では、倍力装置指令値Mx(t)に対するペダルストローク量S(t)に基づく第2倍力装置指令値の寄与度ωを、図6(3)に示す特性に設定した。
この寄与度ωの設定例は、一例として示したものであり、これ以外の特性を設定することもできる。
【0135】
実施例2では、ペダルストローク量S(t)、およびマスターシリンダ圧力Mc(t)の所定時間内での偏差ΔS(t)、ΔMc(t)を算出し、偏差ΔS(t)、ΔMc(t)のいずれか一方が所定値以上であるときには過渡制動状態であると判定し、偏差ΔS(t)、ΔMc(t)がともに所定値未満であるときには、定常制動状態であると判定する例を示した。
しかし、制動状態の判定方法はこれに限定されるものではなく、ペダルストローク量S(t)、およびマスターシリンダ圧力Mc(t)の少なくとも一方が、所定値θ未満となった場合には、所定値γ以上となるまで定常制動状態であると判定して、所定値γ以上となった場合には、過渡制動状態であると判定するようにしてもよい。
【0136】
実施例1〜2では、本発明の車両用制動力制御装置を、電動車両の制動装置に適用する例を示した。
しかし、本発明の車両用制動力制御装置は、エンジンを原動機とする車両に対しても適用することができる。また、エンジンと電動モータを併用するハイブリッド車両の制動装置に対しても適用することができる。
【符号の説明】
【0137】
1 ブレーキペダル
2 電動ブースタ(倍力装置)
3 マスターシリンダ
4 ブレーキ液圧アクチュエータ
5FL、5FR、5RL、5RR ホイールシリンダ
6 ブレーキコントローラ
7 モータ駆動回路
9 インプットロッド
10 電動モータ
11 プライマリピストン(マスターシリンダピストン)
13 バネ
18 ストロークセンサ(ストローク量検出手段)
19 マスターシリンダ圧力センサ(マスターシリンダ圧力検出手段)
20 モータレゾルバ
60 外部入力信号検出部
61 倍力装置指令値演算部(倍力装置指令値演算手段)
62 ドライバ制動状態判定部(ドライバ制動状態判定手段)
63 倍力装置指令値平滑化処理部(平滑化処理手段)
【特許請求の範囲】
【請求項1】
ブレーキ操作時に、ドライバのペダル踏力を加えるブレーキペダルと、
前記ペダル踏力にアシスト推力を加える倍力装置と、
前記ペダル踏力をインプットロッドからバネを介してマスターシリンダピストンへ入力し、前記ペダル踏力に前記倍力装置によるアシスト推力を加え、各輪に設けられたホイールシリンダへ導くマスターシリンダ圧力を発生させるマスターシリンダと、
ブレーキ操作時の、ブレーキペダルのペダルストローク量を検出するストローク量検出手段と、
前記マスターシリンダ圧力を検出するマスターシリンダ圧力検出手段と、
前記ストローク量検出手段で検出されたペダルストローク量と、前記マスターシリンダ圧力検出手段で検出されたマスターシリンダ圧力の少なくとも2つの値に基づいて、前記倍力装置の動作量を演算する倍力装置指令値演算手段と、
前記倍力装置指令値演算手段によって演算された前記動作量に平滑化処理を施して、前記倍力装置の動作量とする平滑化処理手段と、
を備えることを特徴とする車両用制動力制御装置。
【請求項2】
請求項1に記載された車両用制動力制御装置において、
ドライバの要求する制動状態を判定するドライバ制動状態判定手段を有し、
前記平滑化処理手段は、前記ドライバ制動状態判定手段によって判定された制動状態に応じた平滑化効果を有する平滑化処理を行う
ことを特徴とする車両用制動力制御装置。
【請求項3】
請求項2に記載された車両用制動制力御装置において、
前記ドライバ制動状態判定手段は、所定時間内における前記動作量の変化量が所定値以上であるときを過渡制動状態と判定し、
前記所定時間内における前記変化量が所定値未満であるときを定常制動状態と判定する
ことを特徴とする車両用制動力制御装置。
【請求項4】
請求項2に記載された車両用制動力制御装置において、
前記ドライバ制動状態判定手段は、前記ペダルストローク量と前記マスターシリンダ圧力のうち、少なくとも一方の、所定時間内における変化量が所定値以上であるときを過渡制動状態と判定し、
前記所定時間内における前記変化量がともに所定値未満であるときを定常制動状態と判定する
ことを特徴とする車両用制動力制御装置。
【請求項5】
請求項3又は請求項4に記載された車両用制動力制御装置において、
前記平滑化処理手段は、前記動作量に対して、前記制動状態が過渡制動状態と判定されたときに、前記制動状態が定常制動状態と判定されたときに比べて、平滑化効果が高い平滑化処理を行う
ことを特徴とする車両用制動力制御装置。
【請求項1】
ブレーキ操作時に、ドライバのペダル踏力を加えるブレーキペダルと、
前記ペダル踏力にアシスト推力を加える倍力装置と、
前記ペダル踏力をインプットロッドからバネを介してマスターシリンダピストンへ入力し、前記ペダル踏力に前記倍力装置によるアシスト推力を加え、各輪に設けられたホイールシリンダへ導くマスターシリンダ圧力を発生させるマスターシリンダと、
ブレーキ操作時の、ブレーキペダルのペダルストローク量を検出するストローク量検出手段と、
前記マスターシリンダ圧力を検出するマスターシリンダ圧力検出手段と、
前記ストローク量検出手段で検出されたペダルストローク量と、前記マスターシリンダ圧力検出手段で検出されたマスターシリンダ圧力の少なくとも2つの値に基づいて、前記倍力装置の動作量を演算する倍力装置指令値演算手段と、
前記倍力装置指令値演算手段によって演算された前記動作量に平滑化処理を施して、前記倍力装置の動作量とする平滑化処理手段と、
を備えることを特徴とする車両用制動力制御装置。
【請求項2】
請求項1に記載された車両用制動力制御装置において、
ドライバの要求する制動状態を判定するドライバ制動状態判定手段を有し、
前記平滑化処理手段は、前記ドライバ制動状態判定手段によって判定された制動状態に応じた平滑化効果を有する平滑化処理を行う
ことを特徴とする車両用制動力制御装置。
【請求項3】
請求項2に記載された車両用制動制力御装置において、
前記ドライバ制動状態判定手段は、所定時間内における前記動作量の変化量が所定値以上であるときを過渡制動状態と判定し、
前記所定時間内における前記変化量が所定値未満であるときを定常制動状態と判定する
ことを特徴とする車両用制動力制御装置。
【請求項4】
請求項2に記載された車両用制動力制御装置において、
前記ドライバ制動状態判定手段は、前記ペダルストローク量と前記マスターシリンダ圧力のうち、少なくとも一方の、所定時間内における変化量が所定値以上であるときを過渡制動状態と判定し、
前記所定時間内における前記変化量がともに所定値未満であるときを定常制動状態と判定する
ことを特徴とする車両用制動力制御装置。
【請求項5】
請求項3又は請求項4に記載された車両用制動力制御装置において、
前記平滑化処理手段は、前記動作量に対して、前記制動状態が過渡制動状態と判定されたときに、前記制動状態が定常制動状態と判定されたときに比べて、平滑化効果が高い平滑化処理を行う
ことを特徴とする車両用制動力制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【公開番号】特開2013−86638(P2013−86638A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−228437(P2011−228437)
【出願日】平成23年10月18日(2011.10.18)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月18日(2011.10.18)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]