
車両用制動装置
【課題】 助勢限界以降における運転者が受ける反力を低減させて、運転者の踏力を制動力として効率的に利用することができる車両用制動装置を提供する。
【解決手段】 本発明の車両用制動装置は、入力ピストンの移動量に応じた反力圧を反力室に発生させる反力発生装置と、反力室と反力発生装置とを連通する液路から分岐されてリザーバに連通する開放路に設けられた切替弁と、アキュムレータに蓄積された実アキュムレータ圧のブレーキ液をブレーキペダルの踏力または操作量に応じて制御することによって助勢圧を発生し、マスタシリンダの助勢圧室に助勢圧を供給することで踏力を倍力した推力をマスタピストンに作用させる倍力装置と、倍力装置が発生する助勢圧が助勢限界であることを示す所定条件が成立したか否かを判定する助勢限界判定部と、所定条件が成立したことが助勢限界判定部によって判定されると、切替弁を開放状態に切替える切替制御部と、を備える。
【解決手段】 本発明の車両用制動装置は、入力ピストンの移動量に応じた反力圧を反力室に発生させる反力発生装置と、反力室と反力発生装置とを連通する液路から分岐されてリザーバに連通する開放路に設けられた切替弁と、アキュムレータに蓄積された実アキュムレータ圧のブレーキ液をブレーキペダルの踏力または操作量に応じて制御することによって助勢圧を発生し、マスタシリンダの助勢圧室に助勢圧を供給することで踏力を倍力した推力をマスタピストンに作用させる倍力装置と、倍力装置が発生する助勢圧が助勢限界であることを示す所定条件が成立したか否かを判定する助勢限界判定部と、所定条件が成立したことが助勢限界判定部によって判定されると、切替弁を開放状態に切替える切替制御部と、を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転者によるブレーキ操作量に応じて車両に付与する制動力を制御する車両用制動装置に関する。
【背景技術】
【0002】
運転者によるブレーキ操作量に応じて車両に付与する制動力を制御する車両用制動装置の一例として、例えば、特許文献1に挙げられる車両用制動装置が知られている。特許文献1に記載の車両用制動装置は、入力ピストンと加圧ピストンが所定間隔(ストローク)をもって離間した状態で保持されており、入力ピストンの移動に応じて、ホイールシリンダにはアキュムレータとリニア弁とによって発生された制御油圧に基づく制動力が付与される。
【0003】
また、特許文献1に記載の車両用制動装置は、制御油圧がアキュムレータの発生する油圧に到達すると助勢限界となり、それ以降は入力ピストンで加圧ピストンを直接押圧してシリンダの圧力室を加圧して、所定の制動力をホイールシリンダに付与することになる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−62614号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の発明では、助勢限界となり入力ピストンで加圧ピストンを直接押圧する際には、運転者は、反力室の油圧に基づく反力と加圧ピストンからのシリンダ圧に基づく反力とを受けるため、運転者が受ける反力が増大する。
【0006】
本発明は、上記実情に鑑みてなされたものであり、助勢限界以降における運転者が受ける反力を低減させて、運転者の踏力を制動力として効率的に利用することができる車両用制動装置を提供することを課題とする。
【課題を解決するための手段】
【0007】
様相1に係る車両用制動装置は、ブレーキペダルの操作に連動して軸線方向に摺動する入力ピストンが入力シリンダ穴に内嵌され、入力ピストンの前進方向に離間距離を有して配置され入力ピストンに対し独立して軸線方向に摺動するマスタピストンが加圧シリンダ穴に内嵌されたマスタシリンダと、入力シリンダ穴の底部と入力ピストンの前端面とで区画された反力室と連通し、入力ピストンの移動量に応じた反力圧を反力室に発生させる反力発生装置と、反力室と反力発生装置とを連通する液路から分岐されてリザーバに連通する開放路に設けられた切替弁と、アキュムレータに蓄積された実アキュムレータ圧のブレーキ液をブレーキペダルの踏力または操作量に応じて制御することによって助勢圧を発生し、加圧シリンダ穴をマスタピストンの後方側で区画して形成された助勢圧室に助勢圧を供給することで踏力を倍力した推力をマスタピストンに作用させる倍力装置と、加圧シリンダ穴をマスタピストンの前方側で区画して形成されマスタピストンの前進に応じて基礎液圧を発生する液圧室に連通するホイールシリンダを有する車輪のブレーキと、倍力装置が発生する助勢圧が助勢限界であることを示す所定条件が成立したか否かを判定する助勢限界判定部と、所定条件が成立したことが助勢限界判定部によって判定されると、切替弁を開放状態に切替える切替制御部と、を備えることを特徴とする。
【0008】
様相2に係る車両用制動装置は、様相1において、所定条件が、実アキュムレータ圧と倍力装置が現実に発生した実助勢圧との差が第1所定値未満となることである。
【0009】
様相3に係る車両用制動装置は、様相1において、ブレーキペダルの踏力または操作量に応じて倍力装置が発生する目標助勢圧を演算する目標助勢圧演算部を設け、所定条件が、実アキュムレータ圧と目標助勢圧との差が第2所定値未満となることである。
【0010】
様相4に係る車両用制動装置は、様相1において、ブレーキペダルの踏力または操作量に応じて倍力装置が発生する目標助勢圧を演算する目標助勢圧演算部と、アキュムレータに蓄積された圧力の推定値である推定アキュムレータ圧を演算する推定アキュムレータ圧演算部と、を設け、所定条件が、推定アキュムレータ圧と目標助勢圧との差が第3所定値未満となることである。
【0011】
様相5に係る車両用制動装置は、様相2において、ブレーキペダルの踏力または操作量に応じて倍力装置が発生する目標助勢圧を演算する目標助勢圧演算部と、アキュムレータに蓄積された圧力の推定値である推定アキュムレータ圧を演算する推定アキュムレータ圧演算部と、を設け、目標助勢圧が推定アキュムレータ圧より小さい場合は、切替制御部は切替弁を閉止状態に維持する。
【0012】
様相6に係る車両用制動装置は、様相1〜5のいずれか1つの様相において、切替制御部が、ブレーキペダルの操作が継続する一制動操作中は、切替弁を開放状態に切替えた後に所定条件が成立しないことが助勢限界判定部によって判定されても、切替弁を開放状態に維持する。
【発明の効果】
【0013】
様相1に係る車両用制動装置によれば、助勢圧が助勢限界であることを示す所定条件が成立したことが助勢限界判定部によって判定されると、切替制御部は、切替弁を開放状態に切替える。そのため、反力室からの反力圧に基づく反力が無くなり、運転者が受ける反力が低減される。したがって、助勢圧が助勢限界を超えた以降において、運転者の踏力を制動力として効率的に利用することができる。
【0014】
様相2に係る車両用制動装置によれば、実アキュムレータ圧と現実に発生した実助勢圧とに基づいて助勢限界の判定を行うので、助勢圧が現実に助勢限界に到達したときに反力圧を開放することができる。そのため、倍力装置は、アキュムレータに蓄圧された圧力エネルギーを最大限に使用して助勢圧を発生させることができる。
【0015】
様相3に係る車両用制動装置によれば、実アキュムレータ圧と目標助勢圧とに基づいて助勢限界の判定を行うので、助勢圧の将来の増減を予測した助勢限界の判定を行うことができる。
【0016】
様相4に係る車両用制動装置によれば、推定アキュムレータ圧と目標助勢圧とに基づいて助勢限界の判定を行うので、アキュムレータ圧及び助勢圧の将来の増減を予測した助勢限界の判定を行うことができる。
【0017】
様相5に係る車両用制動装置によれば、実アキュムレータ圧と実助勢圧とに基づいて助勢圧が助勢限界であると判定された場合であっても、目標助勢圧が推定アキュムレータ圧より小さい場合は、切替制御部は、切替弁を閉止状態に維持する。助勢圧の助勢限界が解消される可能性が高い場合は、切替弁の閉止状態を維持することによって、反力発生装置は、その後も運転者のブレーキ操作量に応じた反力圧を反力室に発生させることができる。
【0018】
様相6に係る車両用制動装置によれば、切替弁が開放状態にある場合は、ブレーキペダルの操作が継続する一制動操作中は切替弁を開放状態に維持する。そのため、切替弁が開放状態と閉止状態を繰り返して、反力圧が急変することによって運転者のペダルフィーリングが悪化することを防止できる。
【図面の簡単な説明】
【0019】
【図1】第1実施形態に係る車両用制動装置の概略構成図である。
【図2】図1に示すブレーキECUの制御ブロック図である。
【図3】(A)は踏力とストロークの関係を示す図であり、(B)は踏力とホイールシリンダ圧(基礎液圧)の関係を示す図である。
【図4】ストロークと助勢圧の関係を示す図である。
【図5】助勢圧とアキュムレータ圧の関係を示す図である。
【図6】第1判定方法〜第3判定方法に係る助勢限界の判定手順を示すフローチャートの一例である。
【図7】助勢圧及びアキュムレータ圧の時間変化を模式的に示した概略図であり、(A)は第1判定方法に係り、(B)は第2判定方法に係り、(C)は第3判定方法に係る。
【図8】第4判定方法に係る助勢限界の判定手順を示すフローチャートの一例である。
【図9】第2実施形態に係る反力発生装置及び倍力装置の概略構成図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施形態を図面に基づいて説明する。なお、各実施形態について共通の箇所には共通の符号を付して対応させることにより重複する説明を省略する。なお、各図は概念図であり、細部構造の寸法まで規定するものではない。
【0021】
(1)第1実施形態
(1−1)車両用制動装置の構成
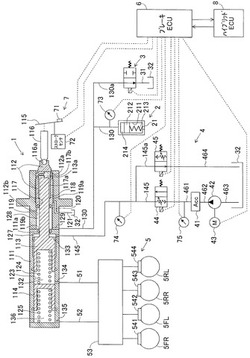
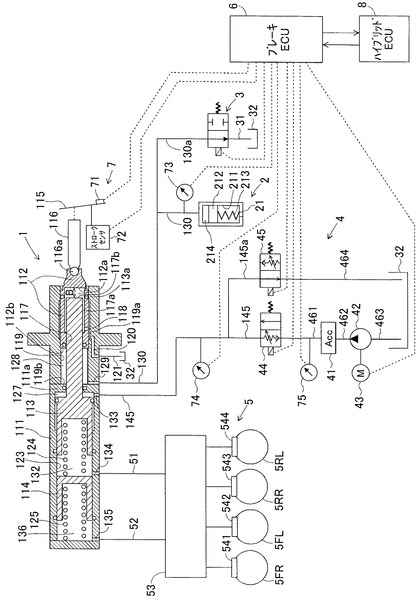
図1は、本実施形態に係る車両用制動装置の概略構成図を示している。本実施形態の車両用制動装置は、入力ピストン112の前進方向に離間距離Bを有して配置され入力ピストン112に対し独立して軸線方向に摺動するマスタピストン113、114を有するマスタシリンダ1と、入力ピストン112の移動量に応じた反力圧Prを反力室128に発生させる反力発生装置2と、反力室128と反力発生装置2とを連通する液路130から分岐されてリザーバ32に連通する開放路31に設けられた切替弁3と、アキュムレータ41に蓄積された実アキュムレータ圧Parのブレーキ液をブレーキペダル115の操作量に応じて制御することによって助勢圧Psを発生させる倍力装置4と、基礎液圧Pbを発生するマスタシリンダ1の液圧室132、136に連通するホイールシリンダ541、542、543、544を有する車輪5FR、5FL、5RR、5RLのブレーキ5と、切替弁3及び倍力装置4を制御するブレーキECU6と、各種センサ7と、回生制動力を制御するハイブリッドECU8と、を備えている。なお、本明細書では、ホイールシリンダ541、542、543、544は、適宜「ホイールシリンダ541〜544」と略記する。車輪5FR、5FL、5RR、5RLは、適宜「車輪5FR〜5RL」と略記する。以下、本実施形態の車両用制動装置が備える各構成要素について、詳細に説明する。
【0022】
(1−2)マスタシリンダ1及び反力発生装置2
図1に示すように、マスタシリンダ1は、基端部が開口して先端部が閉塞した円筒形状を成すシリンダ111を備え、このシリンダ111の内部に基端部から順に入力ピストン112、第1マスタピストン113及び第2マスタピストン114が各々同軸上に配置されて軸線方向に沿って摺動自在に嵌合されている。入力ピストン112は、シリンダ111の基端部外方に一部が突出して配置され、その突出部分にブレーキペダル115の操作ロッド116がピボット116aを用いて連結され、運転者によるブレーキペダル115の操作により操作ロッド116を介して移動可能となっている。なお、本明細書では、ブレーキペダル115の移動量を「ブレーキ操作量」ともいう。また、第1マスタピストン113及び第2マスタピストン114を単に「マスタピストン」ともいう。
【0023】
入力ピストン112は、シリンダ111の基端部側に形成された入力シリンダ穴119に摺動自在に嵌合されている。入力ピストン112には、入力シリンダ穴119内への挿入部分に、先端側が開口し基端部側が閉塞されて閉塞面112aとなった軸穴117が形成されている。この軸穴117に、第1マスタピストン113からシリンダ111の隔壁111aを貫通して基端部側へ延在する円柱状の棒状部分が摺動自在に嵌合されている。この嵌合された棒状部分の端面113aは、入力ピストン112の閉塞面112aと平行状態となっており、それら端面113aと閉塞面112aとの間には、ブレーキペダル115が無操作状態の際に所定距離Bの間隔が確保されるようになっている。
【0024】
入力ピストン112の先端部側の端面112bと入力シリンダ穴119の底部119bとなる隔壁111aとの間には反力室128が形成され、この反力室128の隔壁111aの近傍にはシリンダ111の周壁を外部に貫通するポート129が形成されている。このポート129は配管130を介して、反力発生装置2を構成するストロークシミュレータ21に接続されている。
【0025】
ストロークシミュレータ21は、シリンダ211にピストン212が摺動可能に嵌合され、圧縮スプリング213によって前方に付勢されたピストン212の前面側にパイロット液室214が形成され、パイロット液室214が配管130を介して反力室128に連通されている。ブレーキペダル115の操作により入力ピストン112が前方に移動すると、反力室128からブレーキ液がパイロット液室214に送出されピストン212が圧縮スプリング213の撓み量に比例するばね力に抗して後退される。これにより、反力室128内の圧力がブレーキペダル115の移動量であるブレーキ操作量に応じて上昇し、ブレーキペダル115にはブレーキ操作量に応じた反力が付与される。配管130には、反力室128内の圧力Prを検出する圧力センサ73が設けられている。本明細書では、この反力室128内の圧力Prを「反力圧」という。
【0026】
入力ピストン112の軸穴117の内周面と第1マスタピストン113の棒状部分の外周面との間に軸線方向に沿って所定ギャップの通路117aが形成されるように、軸穴117は軸線方向に所定長さだけ大径に形成されている。入力ピストン112の周壁には当該周壁を貫通する貫通穴118が通路117aと連通するように形成されている。更に、入力ピストン112の外周面と入力シリンダ穴119の内周面との間に軸線方向に沿って所定ギャップの通路119aが形成されるように入力シリンダ穴119は軸線方向に所定長さだけ大径に形成されている。シリンダ111の周壁には、通路120が通路119aの先端付近で連通するように貫通して形成されている。通路120は配管121で、ブレーキ液のリザーバ32に連通されている。したがって、端面113aと閉塞面112aとの間隔部分117bは、通路117a、貫通穴118、通路119a、通路120、配管121を介してリザーバ32に連通している。この連通状態は、ブレーキ操作量に係わらず保持され、間隔部分117bは、常時大気に連通されている。
【0027】
シリンダ111には、加圧シリンダ穴123が入力シリンダ穴119と隔壁111aを挟んで形成されている。第1マスタピストン113は、断面コ字形状を呈し、加圧シリンダ穴123に摺動自在に嵌合されている。第1マスタピストン113の先端部側に配置された第2マスタピストン114は断面がコ字形状を呈し、加圧シリンダ穴123内に摺動自在に嵌合されている。
【0028】
隔壁111aと第1マスタピストン113との間に助勢圧室127が形成され、第1マスタピストン113と第2マスタピストン114との間に第1液圧室132が形成され、第2マスタピストン114と加圧シリンダ穴123の先端閉塞面との間に第2液圧室136が形成されている。第1マスタピストン113のコ字形状の凹部底面と第2マスタピストン114の後端面との間に第1圧縮スプリング124が介在され、第2マスタピストン114のコ字形状の凹部底面と加圧シリンダ穴123の先端閉塞面との間に第2圧縮スプリング125が介在されている。これにより、ブレーキペダル115が無操作状態において、第1マスタピストン113および第2マスタピストン114は第1圧縮スプリング124および第2圧縮スプリング125のばね弾性力によってシリンダ111の基端側に付勢され、所定の各不作動位置にそれぞれ停止されている。本明細書では、第1液圧室132及び第2液圧室136を単に「液圧室」ともいう。
【0029】
ブレーキペダル115の無操作状態において、第1マスタピストン113の棒状部分の端面113aは、入力ピストン112の閉塞面112aとの間に、上述した所定距離Bとなる間隔をもって離間状態に保持されている。運転者がブレーキペダル115を操作し、入力ピストン112が第1マスタピストン113に対して所定距離Bだけ相対的に前進すると、第1マスタピストン113に当接してこれを押圧可能となっている。
【0030】
助勢圧室127の隔壁111aの近傍にはシリンダ111の周壁を外部に貫通するポート133が形成されている。第1マスタピストン113と第2マスタピストン114との間の第1液圧室132には所定の不作動位置に位置する第2マスタピストン114の後端面近傍にシリンダ111の周壁を外部に貫通するポート134が形成されている。更に、第2マスタピストン114の先端部側とシリンダ111の先端閉塞面との間の第2液圧室136には当該先端閉塞面の近傍に、シリンダ111の周壁を外部に貫通するポート135が形成されている。
【0031】
後述する倍力装置4によって、助勢圧Psが助勢圧室127に発生することにより、第1マスタピストン113、第2マスタピストン114が軸線方向に前進して第1液圧室132及び第2液圧室136が加圧される。第1液圧室132及び第2液圧室136の液圧は、ポート134、135から配管51、52及びABS53を経由してホイールシリンダ541〜544へ基礎液圧Pbとして供給され、車輪5FR〜5RLに基礎制動力Fbが付与される。
【0032】
なお、入力シリンダ穴119の内周面と入力ピストン112の外周面との間、加圧シリンダ穴123と第1マスタピストン113及び第2マスタピストン114の外周面との間、並びに、入力ピストン112の軸穴117の内周面及び隔壁111aと第1マスタピストン113の棒状部分の外周面との間には、図1において丸印で示すOリング等のシール部材を装着し、液の漏洩を防止している。
【0033】
(1−3)切替弁3
切替弁3は、反力室128と反力発生装置2とを連通する配管130から分岐した分岐配管130aと、リザーバ32に連通する開放路31と、の間に設けられている。切替弁3は、例えば、電磁弁を用いることができる。切替弁3は、ブレーキECU6からの制御信号に基づいて開閉される。切替弁3が開放状態のときに分岐配管130aと開放路31は連通されて、反力室128のポート129とリザーバ32は連通される。切替弁3が閉止状態のときには、ストロークシミュレータ21によって形成された反力圧Prが反力室128に付与される。
【0034】
(1−4)倍力装置4
倍力装置4は、アキュムレータ41に蓄積された実アキュムレータ圧Parのブレーキ液をブレーキペダル115の操作量に応じて制御することによって助勢圧Psを発生し、マスタシリンダ1の助勢圧室127に助勢圧Psを供給することで踏力Fを倍力した推力をマスタシリンダ1の第1マスタピストン113及び第2マスタピストン114に作用させることができる。
【0035】
助勢圧室127のポート133とリザーバ32との間には、増圧用リニア弁44、減圧用リニア弁45、液圧ポンプ42、アキュムレータ(Acc)41が配管145、145a、461、462、463、464で接続されている。具体的には、ポート133は配管145に連結され、配管145の他端には増圧用リニア弁44の出口側ポートが連結され、増圧用リニア弁44の入口側ポートは配管461でアキュムレータ41の流出口に連結されている。アキュムレータ41の流入口は、配管462で液圧ポンプ42の吐出口に連結され、液圧ポンプ42の吸入口は配管463でリザーバ32に連結されている。液圧ポンプ42には、ポンプ駆動用モータ43が連結されている。ポート133と増圧用リニア弁44とを連結する配管145の途中は分岐しており、分岐配管145aに減圧用リニア弁45の入口側ポートが連結され、減圧用リニア弁45の出口側ポートは配管464でリザーバ32に連結されている。
【0036】
助勢圧室127のポート133に連結された配管145には、助勢圧室127内の液圧である実助勢圧Psrを検出する圧力センサ74が設けられている。アキュムレータ41の流出口に接続された配管461には、アキュムレータ41に蓄圧された圧力エネルギー(実アキュムレータ圧Par)を検出する圧力センサ75が設けられている。
【0037】
アキュムレータ41は、液圧ポンプ42により発生した液圧を蓄圧するものであり、この蓄圧された液圧が増圧用リニア弁44を介して助勢圧室127へ供給されることにより制動力が得られるようになっている。実アキュムレータ圧Parが所定値以下に低下したことが圧力センサ75によって検出されると、ブレーキECU6からの制御信号に基づいてポンプ駆動用モータ43が駆動され、液圧ポンプ42は、アキュムレータ41にブレーキ液を供給してアキュムレータ41に圧力エネルギーを補給する。また、アキュムレータ41は、液圧ポンプ42が吐出したブレーキ液の脈動を緩和するために液圧ポンプ42の上流側に配置されている。
【0038】
増圧用リニア弁44及び減圧用リニア弁45は、流量調整式の電磁弁であり、助勢圧室127の助勢圧Psを高くする場合は、増圧用リニア弁44の絞り抵抗が減少され、減圧用リニア弁45の絞り抵抗が増加されるようになっている。この逆に、助勢圧室127の助勢圧Psを低くする場合は、増圧用リニア弁44の絞り抵抗が増加され、減圧用リニア弁45の絞り抵抗が減少されるようになっている。増圧用リニア弁44の絞り抵抗を最小とし、減圧用リニア弁45を閉止すると、助勢圧室127に助勢限界液圧Psmが発生する。増圧用リニア弁44を閉止し、減圧用リニア弁45の絞り抵抗を最小にすると助勢圧室127の助勢圧Psは無くなる。このように、増圧用リニア弁44の絞り抵抗及び減圧用リニア弁45の絞り抵抗をブレーキ操作量Sに応じて調整して助勢圧Psを発生させる。そして、マスタシリンダ1の助勢圧室127に助勢圧Psを供給することにより、運転者の踏力Fを倍力した推力をマスタシリンダ1の第1マスタピストン113及び第2マスタピストン114に作用させることができる。
【0039】
(1−5)ブレーキ5
基礎液圧Pbを発生する第1液圧室132、第2液圧室136には、配管51、52、ABS53を介してホイールシリンダ541〜544が連通されている。ホイールシリンダ541〜544は、車輪5FR〜5RLのブレーキ5を構成している。具体的には、第1液圧室132のポート134及び第2液圧室136のポート135には、それぞれ配管51、52を介して、公知のABS(Antilock Brake System)53が連結されている。ABS53には、車輪5FR〜5RLを制動するブレーキ装置を作動させるホイールシリンダ541〜544が連結されている。
【0040】
倍力装置4のアキュムレータ41から送出された液圧が増圧用リニア弁44及び減圧用リニア弁45によって制御されて助勢圧Psが助勢圧室127に発生することにより、第1マスタピストン113及び第2マスタピストン114が前進して第1液圧室132及び第2液圧室136が加圧される。第1液圧室132及び第2液圧室136の液圧はポート134、135から配管51、52及びABS53を経由してホイールシリンダ541〜544へ基礎液圧Pbとして供給され、車輪5FR〜5RLに液圧制動力Fbが付与される。
【0041】
(1−6)ブレーキECU6、ハイブリッドECU8
ブレーキECU6は、倍力装置4のポンプ駆動用モータ43、増圧用リニア弁44、減圧用リニア弁45及び切替弁3のリニアソレノイドと電気的に接続されている。ブレーキECU6は、電子制御ユニットであり、これらの機器を制御することができる。また、ブレーキECU6は、ブレーキペダル115に設けられた踏力センサ71、ストロークセンサ72、反力圧Prを検出する圧力センサ73、実助勢圧Psrを検出する圧力センサ74及び実アキュムレータ圧Parを検出する圧力センサ75並びにブレーキECU6の上位制御を行うハイブリッドECU8と電気的に接続されている。ブレーキECU6には、例えば、ストロークセンサ72からのブレーキペダル115のペダルストローク(検出値)が入力されて、ブレーキECU6は、そのペダルストロークからブレーキ操作量Sを求めることができる。ブレーキECU6は、踏力センサ71の検出値(踏力F)又は圧力センサ73の検出値(反力圧Pr)からブレーキ操作量Sを求めることもできる。また、ブレーキECU6は、これらのセンサの検出値を任意に組み合わせて、ブレーキ操作量Sを求めることもできる。
【0042】
ブレーキECU6は、ストロークセンサ72で検出されたブレーキ操作量Sに応じた目標制動力Ftをマップ、テーブル又は演算式から求める。ブレーキECU6は、その目標制動力Ftを目標回生制動力Frtと目標液圧制動力Fbtとに配分する。目標液圧制動力Fbtに応じた助勢圧Psを発生させるため、ブレーキECU6は、増圧用リニア弁44及び減圧用リニア弁45の絞り抵抗を制御する制御信号を出力する。具体的には、ブレーキECU6は、増圧用リニア弁44及び減圧用リニア弁45のリニアソレノイドに印加する電流値を出力する。ブレーキECU6からの制御信号を受けて、倍力装置4は、目標液圧制動力Fbtに応じた助勢圧Psを助勢圧室127に発生させる。そして、助勢圧Psは、ホイールシリンダ541〜544へ基礎液圧Pbとして供給され、車輪5FR〜5RLに液圧制動力Fbが付与される。
【0043】
また、目標回生制動力Frtに応じてハイブリッドECU8が回生制動力Frを駆動輪に付与する。具体的には、ハイブリッドECU8は、目標回生制動力Frtに応じて図示しない電気モータを駆動輪の回転による発電機として作動させることで、回生ブレーキを駆動輪に付与して車両を減速しつつ、運動(回転)エネルギーを電気エネルギーに変換し、この電気エネルギーを図示しないインバータを介してバッテリに回収する。このようにして、車輪5FR〜5RLに液圧制動力Fbと回生制動力Frとが付与される回生協調制御を行うことができる。
【0044】
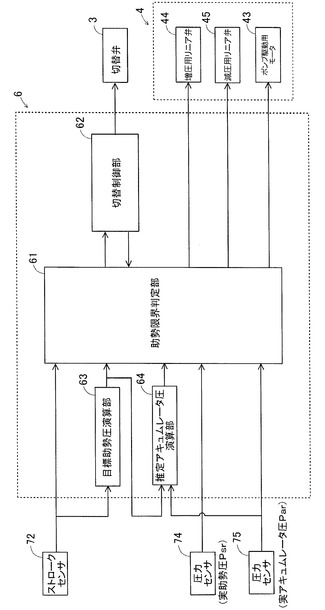
図2は、図1に示すブレーキECUの制御ブロック図を示している。ブレーキECU6は、制御ブロックとして捉えた場合には、助勢限界判定部61、切替制御部62、目標助勢圧演算部63及び推定アキュムレータ圧演算部64を有している。助勢限界判定部61には、ストロークセンサ72の検出値が入力され、実助勢圧Psrを検出する圧力センサ74及び実アキュムレータ圧Parを検出する圧力センサ75の各検出値並びに目標助勢圧演算部63及び推定アキュムレータ圧演算部64の各演算結果が必要に応じて入力される。
【0045】
助勢限界判定部61は、ポンプ駆動用モータ43、増圧用リニア弁44及び減圧用リニア弁45を制御するとともに、助勢圧Psが助勢限界であることを示す所定条件が成立したか否かを判定する。判定結果は、切替制御部62に出力される。切替制御部62は、所定条件が成立したことが助勢限界判定部61によって判定されると、切替弁3を開放状態に切替える。また、切替制御部62は、切替弁3の開閉状態(開放状態又は閉止状態)を助勢限界判定部61に出力する。以下、図3に基づいて詳細に説明する。
【0046】
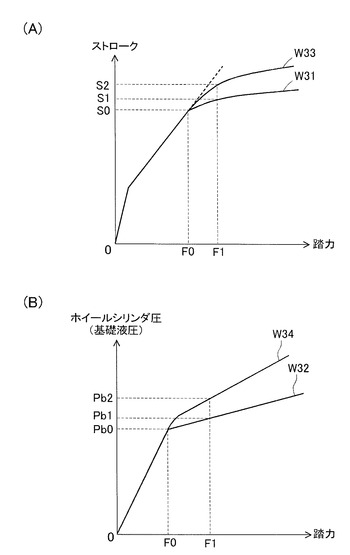
図3(A)は踏力とストロークの関係を示しており、同図(B)は踏力とホイールシリンダ圧(基礎液圧)の関係を示している。運転者によってブレーキペダル115が操作されて運転者の踏力Fが増加すると、ブレーキ操作量であるストロークS及びホイールシリンダ圧(基礎液圧)Pbは増加する。踏力FがF0までは、反力室128内の反力圧Prが踏力Fに応じて上昇し、ブレーキペダル115には、ストロークシミュレータ21によって形成された反力が付与される。助勢限界判定部61(ブレーキECU6)からの制御信号に基づいて、倍力装置4は、助勢圧Psを発生し、マスタシリンダ1の助勢圧室127に助勢圧Psを供給する。そして、助勢圧Psは、基礎液圧Pbとしてホイールシリンダ541〜544に供給される。
【0047】
踏力Fが増加して踏力F0になると、アキュムレータ41が供給可能な最大液圧に助勢圧Psが到達して助勢限界となる。このときのストロークS及びホイールシリンダ圧(基礎液圧)Pbは、それぞれS0、Pb0である。助勢圧Psが助勢限界に達すると、アキュムレータ41の蓄圧によっては、基礎液圧Pbをこれ以上増加させることができなくなる。そのため、踏力FがF0を超えると、入力ピストン112で第1マスタピストン113を直接押圧してマスタシリンダ1の第1液圧室132及び第2液圧室136を加圧して、目標液圧制動力Fbtに応じた基礎液圧Pbをホイールシリンダ541〜544に付与することになる。反力室128の径方向断面積をSr、助勢圧室127の径方向断面積をSs、第1液圧室132及び第2液圧室136の径方向断面積をSbとすると、基礎液圧Pb、助勢圧Ps及び反力圧Prの関係は、下記数1で表すことができる。
(数1)
Pb×Sb=Ps×Ss−Pr×Sr+F
【0048】
従来において、助勢圧Psが助勢限界となり入力ピストン112で第1マスタピストン113を直接押圧する際には、運転者は、反力圧Prに基づく反力Pr×Srと、第1マスタピストン113からの基礎液圧Pbに基づく反力Pb×Sbと、を受けるため、運転者が受ける反力が増大する。図3では、この状態を曲線W31及び曲線W32で示している。助勢圧Psが助勢限界に到達している踏力F1になると、ストロークS及びホイールシリンダ圧(基礎液圧)Pbは、それぞれS1、Pb1になる。踏力Fがさらに増加しても、ストロークS及びホイールシリンダ圧(基礎液圧)Pbの増加は緩やかである。
【0049】
本実施形態では、助勢圧Psが助勢限界であることを示す所定条件が成立したことが助勢限界判定部61によって判定されると、切替制御部62は、切替弁3を開放状態に切替える。切替弁3が開放状態になると、反力室128のポート129からリザーバ32の方向へブレーキ液が排出されて、反力圧Prが無くなる。よって、上記数1に示す反力圧Prに基づく反力Pr×Srも無くなり、運転者が受ける反力が低減される。助勢圧Psが助勢限界を超えた以降は、ストロークSの増加に対して、運転者のブレーキ操作量に近いホイールシリンダ圧(基礎液圧)Pbの増加が得られる。したがって、助勢圧Psが助勢限界を超えた以降において、運転者の踏力Fを液圧制動力Fbとして効率的に利用することができる。図3では、この状態を曲線W33及び曲線W34で示している。踏力F1のとき、ストロークS及びホイールシリンダ圧(基礎液圧)Pbは、それぞれS2、Pb2であり、切替弁3を閉止状態のままにした既述の場合(S1、Pb1)と比べて、それぞれ大きくなっている。
【0050】
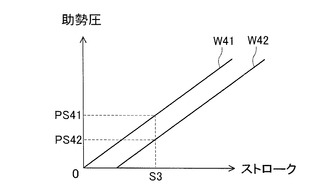
目標助勢圧演算部63は、ブレーキペダル115の操作量Sに応じて倍力装置4が発生する目標助勢圧Pstgを演算する。目標助勢圧演算部63は、ストロークセンサ72で検出されたブレーキ操作量Sに応じた目標助勢圧Pstgをマップ、テーブル又は演算式から求めることができる。ストロークSと目標助勢圧Pstgの関係を示すマップ、テーブル又は演算式は、予め試験等によって求められて、ブレーキECU6のメモリ内に格納されたプログラムに記憶されている。図4は、ストロークと助勢圧の関係を示しており、回生制動を行わない場合を曲線W41で示し、回生制動を行う場合を曲線W42で示している。例えば、バッテリの充電状況等によって回生制動が行えない場合は、ブレーキ操作量SがS3のときには、目標助勢圧PstgとしてPS41が出力される。回生制動を行う場合は、ブレーキ操作量SがS3のときには、目標助勢圧PstgとしてPS42が出力される。
【0051】
なお、目標助勢圧演算部63は、踏力センサ71又は反力圧Prを検出する圧力センサ73の検出値から目標助勢圧Pstgを求めることもできる。また、目標助勢圧演算部63は、これらのセンサの検出値を任意に組み合わせて、目標助勢圧Pstgを求めることもできる。この場合は、踏力F及び/又は反力圧Prが上述のストロークSに相当する。
【0052】
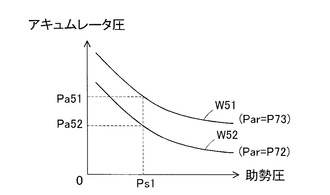
推定アキュムレータ圧演算部64は、アキュムレータ41に蓄積された圧力の推定値である推定アキュムレータ圧Paesを演算する。推定アキュムレータ圧演算部64は、推定アキュムレータ圧Paesを実アキュムレータ圧Par及び目標助勢圧Pstgに基づいて、マップ、テーブル又は演算式から求める。これらの関係を示すマップ、テーブル又は演算式は、予め試験等によって求められて、ブレーキECU6のメモリ内に格納されたプログラムに記憶されている。
【0053】
図5は、助勢圧とアキュムレータ圧の関係を示しており、実アキュムレータ圧ParがP73の場合を曲線W51で示し、実アキュムレータ圧ParがP72の場合を曲線W52で示している。実アキュムレータ圧ParがP73の場合は、目標助勢圧PstgがPs1のときには、推定アキュムレータ圧PaesとしてPa51が出力される。実アキュムレータ圧ParがP72の場合は、目標助勢圧PstgがPs1のときには、推定アキュムレータ圧PaesとしてPa52が出力される。
【0054】
(1−7)助勢限界の判定方法
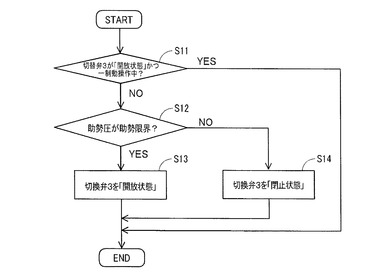
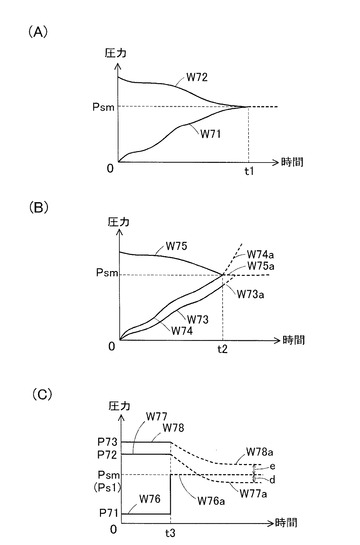
ブレーキECU6は、メモリ内に格納されたプログラムを実行することによって、助勢圧Psが助勢限界であることを示す所定条件が成立したか否かを判定する。図6は、第1判定方法〜第3判定方法に係る助勢限界の判定手順を示すフローチャートの一例である。図7は、助勢圧及びアキュムレータ圧の時間変化を模式的に示した概略図であり、(A)は第1判定方法に係り、(B)は第2判定方法に係り、(C)は第3判定方法に係る。
【0055】
プログラムは、図6に示すフローに従って所定時間の経過毎に繰り返し実行される。ステップS11及びS12の判定は助勢限界判定部61が行い、ステップS13及びS14の処理は切替制御部62が行う。プログラムの初期値として、切替弁3は閉止状態にセットされている。
【0056】
まず、助勢限界判定部61は、切替弁3が開放状態であり、かつ、一制動操作中であるか否かを判定する(ステップS11)。一制動操作中とは、例えば、ストロークセンサ72で検出されたブレーキ操作量Sが経時的に所定量以上あるか否かによって判定される。具体的には、運転者によってブレーキペダル115が操作されて、ブレーキ操作量Sが所定量以上になると、助勢限界判定部61は、制動開始を記憶する。プログラムが繰り返される度にステップS11の判定が行われる。運転者がブレーキペダル115の操作を緩めて(止めて)ブレーキ操作量Sが所定量より小さくなると、助勢限界判定部61は、制動終了を記憶する。制動開始から制動終了までの期間が一制動操作中となる。
【0057】
切替弁3が開放状態であり、かつ、一制動操作中は、後述するステップS12〜S14における判定及び処理を行わずに、切替弁3の開放状態を保持する。一制動操作中に切替弁3が開放状態と閉止状態を繰り返すと、反力圧Prが急変する。切替弁3が開放状態にある場合には、一制動操作中はその状態を保持することによって、反力圧Prの急変を防止することができる。つまり、反力圧Prの急変によって、運転者のペダルフィーリングが悪化することを防止できる。
【0058】
ステップS11の条件を満たさない場合は、助勢限界判定部61は、助勢圧Psが助勢限界であるか否かを判定する(ステップS12)。助勢圧Psが助勢限界であるか否かの判定は、後述する第1判定方法〜第3判定方法のいずれかの方法によって判定される。ステップS12で助勢圧Psが助勢限界であると判定されると、切替制御部62は、切替弁3を開放状態に切替える(ステップS13)。助勢限界であると判定されない場合は、切替制御部62は、切替弁3が開放状態にある場合は切替弁3を閉止状態にする。切替弁3が閉止状態にある場合は、閉止状態を保持する(ステップS14)。そして、ステップS13又はステップS14の処理の後、本ルーチンを一旦終了する。なお、一制動操作の制動終了により切替弁3を閉止状態にする場合は、入力ピストン112がシリンダ111の基端部側に移動するのに伴って、リザーバ32から反力室128のポート129の方向へブレーキ液が供給される。ブレーキ液が供給された後、切替弁3が閉止状態にされる。以下、第1判定方法〜第3判定方法について説明する。
【0059】
(第1判定方法)
第1判定方法は、アキュムレータ41の実アキュムレータ圧Parと倍力装置4が現実に発生した実助勢圧Psrとの差が第1所定値未満であるときに、助勢限界判定部61は、助勢圧Psが助勢限界であると判定する。実アキュムレータ圧Parは、圧力センサ75の検出値を用いる。実助勢圧Psrは、圧力センサ74の検出値を用いる。第1所定値は0であることが望ましいが、本発明の目的を達することができる程度の任意の所定値にすることができる。つまり、本判定方法では、実助勢圧Psrが助勢限界であることが判定可能な第1所定値を設けることができる。第1所定値は、計算機シミュレーション、試験等によって予め算出しておくこともできる。
【0060】
また、本判定方法では、第1所定値は実アキュムレータ圧Parの脈動分に相当する圧力変動分とすることもできる。実アキュムレータ圧Parが脈動すると、脈動する下限圧が実助勢圧Psrと等しくなるときに助勢限界となる。よって、実アキュムレータ圧Parの脈動分に相当する第1所定値を設けておくことにより、アキュムレータ41の圧力脈動分を加味した助勢限界の判定を行うことができる。したがって、実アキュムレータ圧Parが脈動しても、正確に助勢限界の判定を行うことができる。
【0061】
本判定方法では、実アキュムレータ圧Parと現実に発生した実助勢圧Psrとに基づいて助勢限界の判定を行うので、助勢圧Psが現実に助勢限界に到達したときに反力圧Prを開放することができる。そのため、倍力装置4は、アキュムレータ41に蓄圧された圧力エネルギーを最大限に使用して助勢圧Psを発生させることができる。
【0062】
図7(A)は、実助勢圧Psrの時間変化を曲線W71で示し、実アキュムレータ圧Parの時間変化を曲線W72で示している。実助勢圧Psrが増加するにつれて実アキュムレータ圧Parは減少して、時刻t1において、実アキュムレータ圧Parと実助勢圧Psrとは等しくなり、助勢限界液圧Psmとなる。助勢限界判定部61は、実アキュムレータ圧Parと実助勢圧Psrとの差を演算して、その差が第1所定値0であるので、助勢圧Psが助勢限界であると判定する。
【0063】
(第2判定方法)
第2判定方法は、実アキュムレータ圧Parと目標助勢圧Pstgとの差が第2所定値未満であるときに、助勢限界判定部61は、助勢圧Psが助勢限界であると判定する。実アキュムレータ圧Parは、圧力センサ75の検出値を用いる。目標助勢圧Pstgは、目標助勢圧演算部63の演算結果であり、ブレーキペダル115の操作量Sに応じて演算され、助勢圧Psの指令値に相当する。第2所定値は0であることが望ましいが、本発明の目的を達することができる程度の任意の所定値にすることができる。つまり、本判定方法では、目標助勢圧Pstgが助勢限界であることが判定可能な第2所定値を設けることができる。第2所定値は、計算機シミュレーション、試験等によって予め算出しておくこともできる。
【0064】
助勢圧Psは、アキュムレータ41に蓄圧された液圧を増圧用リニア弁44及び減圧用リニア弁45で調圧して形成される。そのため、運転者によってブレーキペダル115が操作されて目標助勢圧Pstgが設定されてから、実助勢圧Psrが目標助勢圧Pstgに到達するまでにタイムラグが生じる。例えば、急制動要求やABS制御の場合は、短時間に大きな制動力が必要となるので、実アキュムレータ圧Parと実助勢圧Psrとに基づいて判定を行うと助勢限界と判定されない場合であっても、すぐに実助勢圧Psrが急増して助勢限界を迎える場合もある。本判定方法では、実アキュムレータ圧Parと目標助勢圧Pstgとに基づいて助勢限界の判定を行うので、助勢圧Psの将来の増減を予測した助勢限界の判定を行うことができる。
【0065】
図7(B)は、実助勢圧Psrの時間変化を曲線W73で示し、目標助勢圧Pstgの時間変化を曲線W74で示し、実アキュムレータ圧Parの時間変化を曲線W75で示している。実助勢圧Psrは、目標助勢圧Pstgに遅れて増加している。実アキュムレータ圧Parは実助勢圧Psrの増加につれて減少している。時刻t2になると、実アキュムレータ圧Parと目標助勢圧Pstgとの差が第2所定値0となり、助勢限界判定部61は、助勢圧Psが助勢限界であると判定する。時刻t2以降の実助勢圧Psrの時間変化を破線W73aで示し、目標助勢圧Pstgの時間変化を破線W74aで示し、実アキュムレータ圧Parの時間変化を破線W75aで示す。時刻t2以降、目標助勢圧Pstgの増加に従って、実助勢圧Psrも増加する。すると、すぐに実助勢圧Psrと実アキュムレータ圧Parは等しくなり、助勢限界液圧Psmとなる。時刻t2において、目標助勢圧Pstgから実助勢圧Psrの増加が予測され、実アキュムレータ圧Parと目標助勢圧Pstgとに基づいて助勢限界の判定を行うと、実助勢圧Psrが助勢限界を迎えることが予測される。そのため、時刻t2において、助勢限界判定部61は、助勢圧Psが助勢限界であると判定する。
【0066】
(第3判定方法)
第3判定方法は、推定アキュムレータ圧Paesと目標助勢圧Pstgとの差が第3所定値未満であるときに、助勢圧Psが助勢限界であると判定する。目標助勢圧Pstgは、目標助勢圧演算部63の演算結果であり、ブレーキペダル115の操作量Sに応じて演算され、助勢圧Psの指令値に相当する。推定アキュムレータ圧Paesは、推定アキュムレータ圧演算部64の演算結果であり、実アキュムレータ圧Par及び目標助勢圧Pstgに応じて算出され、アキュムレータ圧Paの推定値(予測値)である。第3所定値は0であることが望ましいが、本発明の目的を達することができる程度の任意の所定値にすることができる。つまり、本判定方法では、目標助勢圧Pstgが助勢限界であることが判定可能な第3所定値を設けることができる。第3所定値は、計算機シミュレーション、試験等によって予め算出しておくこともできる。
【0067】
図7(C)は、目標助勢圧Pstgの時間変化を曲線W76で示し、実アキュムレータ圧Parの時間変化を曲線W77及びW78で示している。曲線W77は、時刻t3において実アキュムレータ圧ParがP72である場合を示している。曲線W78は、時刻t3において実アキュムレータ圧ParがP73である場合を示している。時刻t3までは、目標助勢圧Pstg及び実アキュムレータ圧Parは、それぞれ一定圧力で推移している。時刻t3になると、目標助勢圧Pstgは、急増してPs1になる。例えば、第2判定方法で既述の急制動要求やABS制御の場合が挙げられる。Ps1は、助勢限界液圧Psmであるとする。時刻t3以降の目標助勢圧Pstgの時間変化を破線W76aで示す。時刻t3以降の実アキュムレータ圧Parの時間変化を破線W77a及びW78aで示す。
【0068】
まず、時刻t3において実アキュムレータ圧ParがP72のときを考える。既述のとおり、推定アキュムレータ圧演算部64は、目標助勢圧PstgがPs1に対する推定アキュムレータ圧Paesとして、Pa52を出力する。助勢限界判定部61は、Pa52とPs1の差dを演算する。差dは第3所定値0より小さいので、助勢限界判定部61は、助勢圧Psが助勢限界であると判定する。一方、時刻t3において実アキュムレータ圧ParがP73の場合は、推定アキュムレータ圧演算部64は、目標助勢圧PstgがPs1に対する推定アキュムレータ圧Paesとして、Pa51を出力する。助勢限界判定部61は、Pa51とPs1の差eを演算する。差eは第3所定値0より大きいので、助勢限界判定部61は、助勢圧Psが助勢限界であると判定しない。
【0069】
本判定方法では、実アキュムレータ圧Par及び実助勢圧Psrが増減を始める前の時刻t3において、推定アキュムレータ圧Paesと目標助勢圧Pstgとに基づいて助勢限界の判定を行う。そのため、アキュムレータ圧Pa及び助勢圧Psの将来の増減を予測した助勢限界の判定を行うことができる。
【0070】
(第4判定方法)
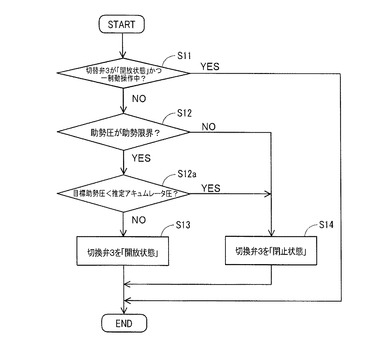
次に、第4判定方法について説明する。第4判定方法は、第1判定方法に係る助勢限界の判定手順と基本的には同様の判定手順を有する。共通する手順には共通の符号を付し、異なる部分を中心に説明する。図8は、第4判定方法に係る助勢限界の判定手順を示すフローチャートの一例である。本判定方法は、第1判定方法と比べて、ステップS12の条件を満たす場合に、ステップS12aの判定を行う点が異なる。
【0071】
ステップS12において、助勢圧Psが助勢限界であると判定された場合、助勢限界判定部61は、目標助勢圧Pstgが推定アキュムレータ圧Paesより小さいか否かを判定する(ステップS12a)。目標助勢圧Pstgが推定アキュムレータ圧Paesより小さい場合は、切替制御部62は、切替弁3を閉止状態に維持する(ステップS14)。一方、目標助勢圧Pstgが推定アキュムレータ圧Paes以上の場合は、切替制御部62は、切替弁3を開放状態に切替える(ステップS13)。目標助勢圧Pstg及び推定アキュムレータ圧Paesは、第3判定方法で既述の目標助勢圧Pstg及び推定アキュムレータ圧Paesと同様である。
【0072】
本判定方法は、第1判定方法と同様に、アキュムレータ41の実アキュムレータ圧Parと倍力装置4が現実に発生した実助勢圧Psrとの差が第1所定値未満であるときに、助勢圧Psが助勢限界であると判定する。そして、助勢圧Psが助勢限界であると判定された場合に、目標助勢圧Pstgが推定アキュムレータ圧Paesより小さい場合は、切替制御部62が切替弁3を閉止状態に維持する。例えば、運転者のブレーキペダル115の操作量Sや踏力Fが小さくなった場合は、実助勢圧Psrの減少が見込まれる。また、アキュムレータ41のポンプ駆動用モータ43が駆動されて、アキュムレータ41に圧力エネルギーが補給されているときは、実アキュムレータ圧Parの上昇が見込まれる。そこで、実アキュムレータ圧Parと実助勢圧Psrとに基づいて助勢圧Psが助勢限界であると判定された場合であっても、目標助勢圧Pstgが推定アキュムレータ圧Paesより小さい場合は、切替制御部62は、切替弁3を閉止状態に維持する。助勢圧Psの助勢限界が解消される可能性が高い場合は、切替弁3の閉止状態を維持することによって、反力発生装置2は、その後も運転者のブレーキ操作量Sに応じた反力圧Prを反力室128に発生させることができる。
【0073】
(2)第2実施形態
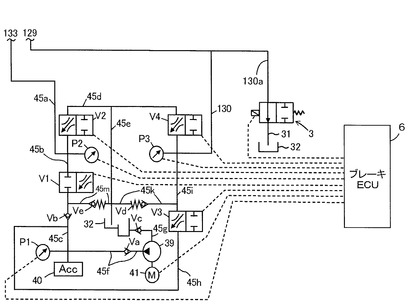
第2実施形態の車両用制動装置は、第1実施形態の車両用制動装置と基本的には同様の構成、作用効果を有する。共通する部位には共通の符号を付し、異なる部分を中心に説明する。本実施形態は、第1実施形態と比べて、反力発生装置2及び倍力装置4が異なる。図9は本実施形態に係る反力発生装置及び倍力装置の概略構成図を示している。
【0074】
助勢圧室127のポート133は、リニア弁である助勢圧室流入調整弁V1、逆止弁Vbを介してアキュムレータ(Acc)40の流出入口に配管45a、45b、45cで連結されると共に、リニア弁である助勢圧室流出調整弁V2を介してリザーバ32に配管45a、45d、45eで連結されている。
【0075】
アキュムレータ40の流出入口には、配管45cから分岐された配管45fで逆止弁Vaを介して液圧ポンプ39の吐出口が連結されている。また、配管45cから分岐された配管45hは、リニア弁である反力室流入調整弁V3の一方の口に連結されている。逆止弁Vaは液圧ポンプ39からアキュムレータ40への流れのみを許容する状態で介挿されている。逆に逆止弁Vaは、アキュムレータ40から吐出される圧力が液圧ポンプ39側に行かないように阻止する。
【0076】
液圧ポンプ39には、液圧ポンプ駆動用のモータ41が連結され、更に、液圧ポンプ39の流入口は、逆止弁Vcを介してリザーバ32に配管45gで連結されている。逆止弁Vcはリザーバ32から液圧ポンプ39の流入口への流れのみを許容する状態で介挿されている。
【0077】
また、反力室流入調整弁V3の他方の口は、配管45i、130を介して反力室128のポート129に連結されている。従って、反力室128のポート129は、配管130、45i、反力室流入調整弁V3、配管45h、45c、45f及び逆止弁Vaを介して液圧ポンプ39に連結されている。また、ポート129は、リニア弁である反力室流出調整弁V4を介してリザーバ32に配管130、45eで連結されている。なお、助勢圧室流入調整弁V1、助勢圧室流出調整弁V2、反力室流入調整弁V3及び反力室流出調整弁V4を、単にリニア弁V1〜V4ともいう。
【0078】
更に、反力室流入調整弁V3と反力室流出調整弁V4とを連結する配管45iの途中と、リザーバ32に連結された配管45eの途中とはリリーフ弁Vdを介して配管45kで連結されている。配管45eの途中と、アキュムレータ40と助勢圧室流入調整弁V1とを連結する配管45cの途中とはリリーフ弁Veを介して配管45mで連結されている。これらリリーフ弁Vd、Veは、反力室128並びにアキュムレータ40に所定以上の圧力が掛かると破損するので、その所定以上の圧力をリザーバ32へ逃がして破損を防止するためのものである。
【0079】
アキュムレータ40の流出入口に接続された配管45cには、アキュムレータ40に蓄圧された圧力エネルギー(実アキュムレータ圧Par)を検出する圧力センサP1が設けられ、助勢圧室127のポート133に連結された配管45aには、助勢圧室127内の液圧を検出する圧力センサP2が設けられ、反力室128のポート129に連結された配管130には、反力室128内の液圧を検出する圧力センサP3が設けられている。
【0080】
アキュムレータ40は、液圧ポンプ39により発生した液圧を蓄圧するものであり、この蓄圧された液圧が助勢圧室流入調整弁V1を介して助勢圧室127へ供給されることにより液圧制動力Fbが得られるようになっている。実アキュムレータ圧Parが所定値以下に低下したことが圧力センサP1によって検出されると、ブレーキECU6の制御信号に基づいて、モータ41が駆動されて、液圧ポンプ39は、アキュムレータ40にブレーキ液を供給してアキュムレータ40に蓄圧された圧力エネルギーを補給する。また、アキュムレータ40は、液圧ポンプ39が吐出したブレーキ液の脈動を緩和することもできる。
【0081】
各リニア弁V1〜V4は、流量調整式の電磁弁であり、各リニア弁V1〜V4の絞り抵抗をブレーキECU6からの制御信号に基づいて制御することにより、助勢圧室127及び反力室128の液圧を調圧することができる。助勢限界判定部61によって、助勢圧Psが助勢限界であると判定されると、切替制御部62は、切替弁3を開放状態に切替える。このとき、反力室流入調整弁V3及び反力室流出調整弁V4の絞り抵抗を最大にして、反力室流入調整弁V3及び反力室流出調整弁V4を閉止しておくのが好ましい。
【0082】
なお、助勢限界判定部61によって、助勢圧Psが助勢限界であると判定されたときに、反力室流出調整弁V4の絞り抵抗を最小にして反力室流出調整弁V4を開放状態にすることにより、切替弁3を開放状態に切替えることと同様の効果を得ることもできる。この場合は、切替弁3を省略することができる。
【0083】
(3)その他
本発明は上記し且つ図面に示した実施形態のみに限定されるものではなく、要旨を逸脱しない範囲内で適宜変更して実施可能である。
【符号の説明】
【0084】
1:マスタシリンダ
112:入力ピストン 113、114:マスタピストン
128:反力室 127:助勢圧室 132、136:液圧室
2:反力発生装置
3:切替弁 31:開放路 32:リザーバ
4:倍力装置 41:アキュムレータ
5:ブレーキ
541、542、543、544:ホイールシリンダ
5FR、5FL、5RR、5RL:車輪
6:ブレーキECU
61:助勢限界判定部 62:切替制御部
63:目標助勢圧演算部 64:推定アキュムレータ圧演算部
Pr:反力圧
Ps:助勢圧 Psr:実助勢圧 Pstg:目標助勢圧
Par:実アキュムレータ圧 Paes:推定アキュムレータ圧
Pb:基礎液圧
【技術分野】
【0001】
本発明は、運転者によるブレーキ操作量に応じて車両に付与する制動力を制御する車両用制動装置に関する。
【背景技術】
【0002】
運転者によるブレーキ操作量に応じて車両に付与する制動力を制御する車両用制動装置の一例として、例えば、特許文献1に挙げられる車両用制動装置が知られている。特許文献1に記載の車両用制動装置は、入力ピストンと加圧ピストンが所定間隔(ストローク)をもって離間した状態で保持されており、入力ピストンの移動に応じて、ホイールシリンダにはアキュムレータとリニア弁とによって発生された制御油圧に基づく制動力が付与される。
【0003】
また、特許文献1に記載の車両用制動装置は、制御油圧がアキュムレータの発生する油圧に到達すると助勢限界となり、それ以降は入力ピストンで加圧ピストンを直接押圧してシリンダの圧力室を加圧して、所定の制動力をホイールシリンダに付与することになる。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−62614号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、特許文献1に記載の発明では、助勢限界となり入力ピストンで加圧ピストンを直接押圧する際には、運転者は、反力室の油圧に基づく反力と加圧ピストンからのシリンダ圧に基づく反力とを受けるため、運転者が受ける反力が増大する。
【0006】
本発明は、上記実情に鑑みてなされたものであり、助勢限界以降における運転者が受ける反力を低減させて、運転者の踏力を制動力として効率的に利用することができる車両用制動装置を提供することを課題とする。
【課題を解決するための手段】
【0007】
様相1に係る車両用制動装置は、ブレーキペダルの操作に連動して軸線方向に摺動する入力ピストンが入力シリンダ穴に内嵌され、入力ピストンの前進方向に離間距離を有して配置され入力ピストンに対し独立して軸線方向に摺動するマスタピストンが加圧シリンダ穴に内嵌されたマスタシリンダと、入力シリンダ穴の底部と入力ピストンの前端面とで区画された反力室と連通し、入力ピストンの移動量に応じた反力圧を反力室に発生させる反力発生装置と、反力室と反力発生装置とを連通する液路から分岐されてリザーバに連通する開放路に設けられた切替弁と、アキュムレータに蓄積された実アキュムレータ圧のブレーキ液をブレーキペダルの踏力または操作量に応じて制御することによって助勢圧を発生し、加圧シリンダ穴をマスタピストンの後方側で区画して形成された助勢圧室に助勢圧を供給することで踏力を倍力した推力をマスタピストンに作用させる倍力装置と、加圧シリンダ穴をマスタピストンの前方側で区画して形成されマスタピストンの前進に応じて基礎液圧を発生する液圧室に連通するホイールシリンダを有する車輪のブレーキと、倍力装置が発生する助勢圧が助勢限界であることを示す所定条件が成立したか否かを判定する助勢限界判定部と、所定条件が成立したことが助勢限界判定部によって判定されると、切替弁を開放状態に切替える切替制御部と、を備えることを特徴とする。
【0008】
様相2に係る車両用制動装置は、様相1において、所定条件が、実アキュムレータ圧と倍力装置が現実に発生した実助勢圧との差が第1所定値未満となることである。
【0009】
様相3に係る車両用制動装置は、様相1において、ブレーキペダルの踏力または操作量に応じて倍力装置が発生する目標助勢圧を演算する目標助勢圧演算部を設け、所定条件が、実アキュムレータ圧と目標助勢圧との差が第2所定値未満となることである。
【0010】
様相4に係る車両用制動装置は、様相1において、ブレーキペダルの踏力または操作量に応じて倍力装置が発生する目標助勢圧を演算する目標助勢圧演算部と、アキュムレータに蓄積された圧力の推定値である推定アキュムレータ圧を演算する推定アキュムレータ圧演算部と、を設け、所定条件が、推定アキュムレータ圧と目標助勢圧との差が第3所定値未満となることである。
【0011】
様相5に係る車両用制動装置は、様相2において、ブレーキペダルの踏力または操作量に応じて倍力装置が発生する目標助勢圧を演算する目標助勢圧演算部と、アキュムレータに蓄積された圧力の推定値である推定アキュムレータ圧を演算する推定アキュムレータ圧演算部と、を設け、目標助勢圧が推定アキュムレータ圧より小さい場合は、切替制御部は切替弁を閉止状態に維持する。
【0012】
様相6に係る車両用制動装置は、様相1〜5のいずれか1つの様相において、切替制御部が、ブレーキペダルの操作が継続する一制動操作中は、切替弁を開放状態に切替えた後に所定条件が成立しないことが助勢限界判定部によって判定されても、切替弁を開放状態に維持する。
【発明の効果】
【0013】
様相1に係る車両用制動装置によれば、助勢圧が助勢限界であることを示す所定条件が成立したことが助勢限界判定部によって判定されると、切替制御部は、切替弁を開放状態に切替える。そのため、反力室からの反力圧に基づく反力が無くなり、運転者が受ける反力が低減される。したがって、助勢圧が助勢限界を超えた以降において、運転者の踏力を制動力として効率的に利用することができる。
【0014】
様相2に係る車両用制動装置によれば、実アキュムレータ圧と現実に発生した実助勢圧とに基づいて助勢限界の判定を行うので、助勢圧が現実に助勢限界に到達したときに反力圧を開放することができる。そのため、倍力装置は、アキュムレータに蓄圧された圧力エネルギーを最大限に使用して助勢圧を発生させることができる。
【0015】
様相3に係る車両用制動装置によれば、実アキュムレータ圧と目標助勢圧とに基づいて助勢限界の判定を行うので、助勢圧の将来の増減を予測した助勢限界の判定を行うことができる。
【0016】
様相4に係る車両用制動装置によれば、推定アキュムレータ圧と目標助勢圧とに基づいて助勢限界の判定を行うので、アキュムレータ圧及び助勢圧の将来の増減を予測した助勢限界の判定を行うことができる。
【0017】
様相5に係る車両用制動装置によれば、実アキュムレータ圧と実助勢圧とに基づいて助勢圧が助勢限界であると判定された場合であっても、目標助勢圧が推定アキュムレータ圧より小さい場合は、切替制御部は、切替弁を閉止状態に維持する。助勢圧の助勢限界が解消される可能性が高い場合は、切替弁の閉止状態を維持することによって、反力発生装置は、その後も運転者のブレーキ操作量に応じた反力圧を反力室に発生させることができる。
【0018】
様相6に係る車両用制動装置によれば、切替弁が開放状態にある場合は、ブレーキペダルの操作が継続する一制動操作中は切替弁を開放状態に維持する。そのため、切替弁が開放状態と閉止状態を繰り返して、反力圧が急変することによって運転者のペダルフィーリングが悪化することを防止できる。
【図面の簡単な説明】
【0019】
【図1】第1実施形態に係る車両用制動装置の概略構成図である。
【図2】図1に示すブレーキECUの制御ブロック図である。
【図3】(A)は踏力とストロークの関係を示す図であり、(B)は踏力とホイールシリンダ圧(基礎液圧)の関係を示す図である。
【図4】ストロークと助勢圧の関係を示す図である。
【図5】助勢圧とアキュムレータ圧の関係を示す図である。
【図6】第1判定方法〜第3判定方法に係る助勢限界の判定手順を示すフローチャートの一例である。
【図7】助勢圧及びアキュムレータ圧の時間変化を模式的に示した概略図であり、(A)は第1判定方法に係り、(B)は第2判定方法に係り、(C)は第3判定方法に係る。
【図8】第4判定方法に係る助勢限界の判定手順を示すフローチャートの一例である。
【図9】第2実施形態に係る反力発生装置及び倍力装置の概略構成図である。
【発明を実施するための形態】
【0020】
以下、本発明の実施形態を図面に基づいて説明する。なお、各実施形態について共通の箇所には共通の符号を付して対応させることにより重複する説明を省略する。なお、各図は概念図であり、細部構造の寸法まで規定するものではない。
【0021】
(1)第1実施形態
(1−1)車両用制動装置の構成
図1は、本実施形態に係る車両用制動装置の概略構成図を示している。本実施形態の車両用制動装置は、入力ピストン112の前進方向に離間距離Bを有して配置され入力ピストン112に対し独立して軸線方向に摺動するマスタピストン113、114を有するマスタシリンダ1と、入力ピストン112の移動量に応じた反力圧Prを反力室128に発生させる反力発生装置2と、反力室128と反力発生装置2とを連通する液路130から分岐されてリザーバ32に連通する開放路31に設けられた切替弁3と、アキュムレータ41に蓄積された実アキュムレータ圧Parのブレーキ液をブレーキペダル115の操作量に応じて制御することによって助勢圧Psを発生させる倍力装置4と、基礎液圧Pbを発生するマスタシリンダ1の液圧室132、136に連通するホイールシリンダ541、542、543、544を有する車輪5FR、5FL、5RR、5RLのブレーキ5と、切替弁3及び倍力装置4を制御するブレーキECU6と、各種センサ7と、回生制動力を制御するハイブリッドECU8と、を備えている。なお、本明細書では、ホイールシリンダ541、542、543、544は、適宜「ホイールシリンダ541〜544」と略記する。車輪5FR、5FL、5RR、5RLは、適宜「車輪5FR〜5RL」と略記する。以下、本実施形態の車両用制動装置が備える各構成要素について、詳細に説明する。
【0022】
(1−2)マスタシリンダ1及び反力発生装置2
図1に示すように、マスタシリンダ1は、基端部が開口して先端部が閉塞した円筒形状を成すシリンダ111を備え、このシリンダ111の内部に基端部から順に入力ピストン112、第1マスタピストン113及び第2マスタピストン114が各々同軸上に配置されて軸線方向に沿って摺動自在に嵌合されている。入力ピストン112は、シリンダ111の基端部外方に一部が突出して配置され、その突出部分にブレーキペダル115の操作ロッド116がピボット116aを用いて連結され、運転者によるブレーキペダル115の操作により操作ロッド116を介して移動可能となっている。なお、本明細書では、ブレーキペダル115の移動量を「ブレーキ操作量」ともいう。また、第1マスタピストン113及び第2マスタピストン114を単に「マスタピストン」ともいう。
【0023】
入力ピストン112は、シリンダ111の基端部側に形成された入力シリンダ穴119に摺動自在に嵌合されている。入力ピストン112には、入力シリンダ穴119内への挿入部分に、先端側が開口し基端部側が閉塞されて閉塞面112aとなった軸穴117が形成されている。この軸穴117に、第1マスタピストン113からシリンダ111の隔壁111aを貫通して基端部側へ延在する円柱状の棒状部分が摺動自在に嵌合されている。この嵌合された棒状部分の端面113aは、入力ピストン112の閉塞面112aと平行状態となっており、それら端面113aと閉塞面112aとの間には、ブレーキペダル115が無操作状態の際に所定距離Bの間隔が確保されるようになっている。
【0024】
入力ピストン112の先端部側の端面112bと入力シリンダ穴119の底部119bとなる隔壁111aとの間には反力室128が形成され、この反力室128の隔壁111aの近傍にはシリンダ111の周壁を外部に貫通するポート129が形成されている。このポート129は配管130を介して、反力発生装置2を構成するストロークシミュレータ21に接続されている。
【0025】
ストロークシミュレータ21は、シリンダ211にピストン212が摺動可能に嵌合され、圧縮スプリング213によって前方に付勢されたピストン212の前面側にパイロット液室214が形成され、パイロット液室214が配管130を介して反力室128に連通されている。ブレーキペダル115の操作により入力ピストン112が前方に移動すると、反力室128からブレーキ液がパイロット液室214に送出されピストン212が圧縮スプリング213の撓み量に比例するばね力に抗して後退される。これにより、反力室128内の圧力がブレーキペダル115の移動量であるブレーキ操作量に応じて上昇し、ブレーキペダル115にはブレーキ操作量に応じた反力が付与される。配管130には、反力室128内の圧力Prを検出する圧力センサ73が設けられている。本明細書では、この反力室128内の圧力Prを「反力圧」という。
【0026】
入力ピストン112の軸穴117の内周面と第1マスタピストン113の棒状部分の外周面との間に軸線方向に沿って所定ギャップの通路117aが形成されるように、軸穴117は軸線方向に所定長さだけ大径に形成されている。入力ピストン112の周壁には当該周壁を貫通する貫通穴118が通路117aと連通するように形成されている。更に、入力ピストン112の外周面と入力シリンダ穴119の内周面との間に軸線方向に沿って所定ギャップの通路119aが形成されるように入力シリンダ穴119は軸線方向に所定長さだけ大径に形成されている。シリンダ111の周壁には、通路120が通路119aの先端付近で連通するように貫通して形成されている。通路120は配管121で、ブレーキ液のリザーバ32に連通されている。したがって、端面113aと閉塞面112aとの間隔部分117bは、通路117a、貫通穴118、通路119a、通路120、配管121を介してリザーバ32に連通している。この連通状態は、ブレーキ操作量に係わらず保持され、間隔部分117bは、常時大気に連通されている。
【0027】
シリンダ111には、加圧シリンダ穴123が入力シリンダ穴119と隔壁111aを挟んで形成されている。第1マスタピストン113は、断面コ字形状を呈し、加圧シリンダ穴123に摺動自在に嵌合されている。第1マスタピストン113の先端部側に配置された第2マスタピストン114は断面がコ字形状を呈し、加圧シリンダ穴123内に摺動自在に嵌合されている。
【0028】
隔壁111aと第1マスタピストン113との間に助勢圧室127が形成され、第1マスタピストン113と第2マスタピストン114との間に第1液圧室132が形成され、第2マスタピストン114と加圧シリンダ穴123の先端閉塞面との間に第2液圧室136が形成されている。第1マスタピストン113のコ字形状の凹部底面と第2マスタピストン114の後端面との間に第1圧縮スプリング124が介在され、第2マスタピストン114のコ字形状の凹部底面と加圧シリンダ穴123の先端閉塞面との間に第2圧縮スプリング125が介在されている。これにより、ブレーキペダル115が無操作状態において、第1マスタピストン113および第2マスタピストン114は第1圧縮スプリング124および第2圧縮スプリング125のばね弾性力によってシリンダ111の基端側に付勢され、所定の各不作動位置にそれぞれ停止されている。本明細書では、第1液圧室132及び第2液圧室136を単に「液圧室」ともいう。
【0029】
ブレーキペダル115の無操作状態において、第1マスタピストン113の棒状部分の端面113aは、入力ピストン112の閉塞面112aとの間に、上述した所定距離Bとなる間隔をもって離間状態に保持されている。運転者がブレーキペダル115を操作し、入力ピストン112が第1マスタピストン113に対して所定距離Bだけ相対的に前進すると、第1マスタピストン113に当接してこれを押圧可能となっている。
【0030】
助勢圧室127の隔壁111aの近傍にはシリンダ111の周壁を外部に貫通するポート133が形成されている。第1マスタピストン113と第2マスタピストン114との間の第1液圧室132には所定の不作動位置に位置する第2マスタピストン114の後端面近傍にシリンダ111の周壁を外部に貫通するポート134が形成されている。更に、第2マスタピストン114の先端部側とシリンダ111の先端閉塞面との間の第2液圧室136には当該先端閉塞面の近傍に、シリンダ111の周壁を外部に貫通するポート135が形成されている。
【0031】
後述する倍力装置4によって、助勢圧Psが助勢圧室127に発生することにより、第1マスタピストン113、第2マスタピストン114が軸線方向に前進して第1液圧室132及び第2液圧室136が加圧される。第1液圧室132及び第2液圧室136の液圧は、ポート134、135から配管51、52及びABS53を経由してホイールシリンダ541〜544へ基礎液圧Pbとして供給され、車輪5FR〜5RLに基礎制動力Fbが付与される。
【0032】
なお、入力シリンダ穴119の内周面と入力ピストン112の外周面との間、加圧シリンダ穴123と第1マスタピストン113及び第2マスタピストン114の外周面との間、並びに、入力ピストン112の軸穴117の内周面及び隔壁111aと第1マスタピストン113の棒状部分の外周面との間には、図1において丸印で示すOリング等のシール部材を装着し、液の漏洩を防止している。
【0033】
(1−3)切替弁3
切替弁3は、反力室128と反力発生装置2とを連通する配管130から分岐した分岐配管130aと、リザーバ32に連通する開放路31と、の間に設けられている。切替弁3は、例えば、電磁弁を用いることができる。切替弁3は、ブレーキECU6からの制御信号に基づいて開閉される。切替弁3が開放状態のときに分岐配管130aと開放路31は連通されて、反力室128のポート129とリザーバ32は連通される。切替弁3が閉止状態のときには、ストロークシミュレータ21によって形成された反力圧Prが反力室128に付与される。
【0034】
(1−4)倍力装置4
倍力装置4は、アキュムレータ41に蓄積された実アキュムレータ圧Parのブレーキ液をブレーキペダル115の操作量に応じて制御することによって助勢圧Psを発生し、マスタシリンダ1の助勢圧室127に助勢圧Psを供給することで踏力Fを倍力した推力をマスタシリンダ1の第1マスタピストン113及び第2マスタピストン114に作用させることができる。
【0035】
助勢圧室127のポート133とリザーバ32との間には、増圧用リニア弁44、減圧用リニア弁45、液圧ポンプ42、アキュムレータ(Acc)41が配管145、145a、461、462、463、464で接続されている。具体的には、ポート133は配管145に連結され、配管145の他端には増圧用リニア弁44の出口側ポートが連結され、増圧用リニア弁44の入口側ポートは配管461でアキュムレータ41の流出口に連結されている。アキュムレータ41の流入口は、配管462で液圧ポンプ42の吐出口に連結され、液圧ポンプ42の吸入口は配管463でリザーバ32に連結されている。液圧ポンプ42には、ポンプ駆動用モータ43が連結されている。ポート133と増圧用リニア弁44とを連結する配管145の途中は分岐しており、分岐配管145aに減圧用リニア弁45の入口側ポートが連結され、減圧用リニア弁45の出口側ポートは配管464でリザーバ32に連結されている。
【0036】
助勢圧室127のポート133に連結された配管145には、助勢圧室127内の液圧である実助勢圧Psrを検出する圧力センサ74が設けられている。アキュムレータ41の流出口に接続された配管461には、アキュムレータ41に蓄圧された圧力エネルギー(実アキュムレータ圧Par)を検出する圧力センサ75が設けられている。
【0037】
アキュムレータ41は、液圧ポンプ42により発生した液圧を蓄圧するものであり、この蓄圧された液圧が増圧用リニア弁44を介して助勢圧室127へ供給されることにより制動力が得られるようになっている。実アキュムレータ圧Parが所定値以下に低下したことが圧力センサ75によって検出されると、ブレーキECU6からの制御信号に基づいてポンプ駆動用モータ43が駆動され、液圧ポンプ42は、アキュムレータ41にブレーキ液を供給してアキュムレータ41に圧力エネルギーを補給する。また、アキュムレータ41は、液圧ポンプ42が吐出したブレーキ液の脈動を緩和するために液圧ポンプ42の上流側に配置されている。
【0038】
増圧用リニア弁44及び減圧用リニア弁45は、流量調整式の電磁弁であり、助勢圧室127の助勢圧Psを高くする場合は、増圧用リニア弁44の絞り抵抗が減少され、減圧用リニア弁45の絞り抵抗が増加されるようになっている。この逆に、助勢圧室127の助勢圧Psを低くする場合は、増圧用リニア弁44の絞り抵抗が増加され、減圧用リニア弁45の絞り抵抗が減少されるようになっている。増圧用リニア弁44の絞り抵抗を最小とし、減圧用リニア弁45を閉止すると、助勢圧室127に助勢限界液圧Psmが発生する。増圧用リニア弁44を閉止し、減圧用リニア弁45の絞り抵抗を最小にすると助勢圧室127の助勢圧Psは無くなる。このように、増圧用リニア弁44の絞り抵抗及び減圧用リニア弁45の絞り抵抗をブレーキ操作量Sに応じて調整して助勢圧Psを発生させる。そして、マスタシリンダ1の助勢圧室127に助勢圧Psを供給することにより、運転者の踏力Fを倍力した推力をマスタシリンダ1の第1マスタピストン113及び第2マスタピストン114に作用させることができる。
【0039】
(1−5)ブレーキ5
基礎液圧Pbを発生する第1液圧室132、第2液圧室136には、配管51、52、ABS53を介してホイールシリンダ541〜544が連通されている。ホイールシリンダ541〜544は、車輪5FR〜5RLのブレーキ5を構成している。具体的には、第1液圧室132のポート134及び第2液圧室136のポート135には、それぞれ配管51、52を介して、公知のABS(Antilock Brake System)53が連結されている。ABS53には、車輪5FR〜5RLを制動するブレーキ装置を作動させるホイールシリンダ541〜544が連結されている。
【0040】
倍力装置4のアキュムレータ41から送出された液圧が増圧用リニア弁44及び減圧用リニア弁45によって制御されて助勢圧Psが助勢圧室127に発生することにより、第1マスタピストン113及び第2マスタピストン114が前進して第1液圧室132及び第2液圧室136が加圧される。第1液圧室132及び第2液圧室136の液圧はポート134、135から配管51、52及びABS53を経由してホイールシリンダ541〜544へ基礎液圧Pbとして供給され、車輪5FR〜5RLに液圧制動力Fbが付与される。
【0041】
(1−6)ブレーキECU6、ハイブリッドECU8
ブレーキECU6は、倍力装置4のポンプ駆動用モータ43、増圧用リニア弁44、減圧用リニア弁45及び切替弁3のリニアソレノイドと電気的に接続されている。ブレーキECU6は、電子制御ユニットであり、これらの機器を制御することができる。また、ブレーキECU6は、ブレーキペダル115に設けられた踏力センサ71、ストロークセンサ72、反力圧Prを検出する圧力センサ73、実助勢圧Psrを検出する圧力センサ74及び実アキュムレータ圧Parを検出する圧力センサ75並びにブレーキECU6の上位制御を行うハイブリッドECU8と電気的に接続されている。ブレーキECU6には、例えば、ストロークセンサ72からのブレーキペダル115のペダルストローク(検出値)が入力されて、ブレーキECU6は、そのペダルストロークからブレーキ操作量Sを求めることができる。ブレーキECU6は、踏力センサ71の検出値(踏力F)又は圧力センサ73の検出値(反力圧Pr)からブレーキ操作量Sを求めることもできる。また、ブレーキECU6は、これらのセンサの検出値を任意に組み合わせて、ブレーキ操作量Sを求めることもできる。
【0042】
ブレーキECU6は、ストロークセンサ72で検出されたブレーキ操作量Sに応じた目標制動力Ftをマップ、テーブル又は演算式から求める。ブレーキECU6は、その目標制動力Ftを目標回生制動力Frtと目標液圧制動力Fbtとに配分する。目標液圧制動力Fbtに応じた助勢圧Psを発生させるため、ブレーキECU6は、増圧用リニア弁44及び減圧用リニア弁45の絞り抵抗を制御する制御信号を出力する。具体的には、ブレーキECU6は、増圧用リニア弁44及び減圧用リニア弁45のリニアソレノイドに印加する電流値を出力する。ブレーキECU6からの制御信号を受けて、倍力装置4は、目標液圧制動力Fbtに応じた助勢圧Psを助勢圧室127に発生させる。そして、助勢圧Psは、ホイールシリンダ541〜544へ基礎液圧Pbとして供給され、車輪5FR〜5RLに液圧制動力Fbが付与される。
【0043】
また、目標回生制動力Frtに応じてハイブリッドECU8が回生制動力Frを駆動輪に付与する。具体的には、ハイブリッドECU8は、目標回生制動力Frtに応じて図示しない電気モータを駆動輪の回転による発電機として作動させることで、回生ブレーキを駆動輪に付与して車両を減速しつつ、運動(回転)エネルギーを電気エネルギーに変換し、この電気エネルギーを図示しないインバータを介してバッテリに回収する。このようにして、車輪5FR〜5RLに液圧制動力Fbと回生制動力Frとが付与される回生協調制御を行うことができる。
【0044】
図2は、図1に示すブレーキECUの制御ブロック図を示している。ブレーキECU6は、制御ブロックとして捉えた場合には、助勢限界判定部61、切替制御部62、目標助勢圧演算部63及び推定アキュムレータ圧演算部64を有している。助勢限界判定部61には、ストロークセンサ72の検出値が入力され、実助勢圧Psrを検出する圧力センサ74及び実アキュムレータ圧Parを検出する圧力センサ75の各検出値並びに目標助勢圧演算部63及び推定アキュムレータ圧演算部64の各演算結果が必要に応じて入力される。
【0045】
助勢限界判定部61は、ポンプ駆動用モータ43、増圧用リニア弁44及び減圧用リニア弁45を制御するとともに、助勢圧Psが助勢限界であることを示す所定条件が成立したか否かを判定する。判定結果は、切替制御部62に出力される。切替制御部62は、所定条件が成立したことが助勢限界判定部61によって判定されると、切替弁3を開放状態に切替える。また、切替制御部62は、切替弁3の開閉状態(開放状態又は閉止状態)を助勢限界判定部61に出力する。以下、図3に基づいて詳細に説明する。
【0046】
図3(A)は踏力とストロークの関係を示しており、同図(B)は踏力とホイールシリンダ圧(基礎液圧)の関係を示している。運転者によってブレーキペダル115が操作されて運転者の踏力Fが増加すると、ブレーキ操作量であるストロークS及びホイールシリンダ圧(基礎液圧)Pbは増加する。踏力FがF0までは、反力室128内の反力圧Prが踏力Fに応じて上昇し、ブレーキペダル115には、ストロークシミュレータ21によって形成された反力が付与される。助勢限界判定部61(ブレーキECU6)からの制御信号に基づいて、倍力装置4は、助勢圧Psを発生し、マスタシリンダ1の助勢圧室127に助勢圧Psを供給する。そして、助勢圧Psは、基礎液圧Pbとしてホイールシリンダ541〜544に供給される。
【0047】
踏力Fが増加して踏力F0になると、アキュムレータ41が供給可能な最大液圧に助勢圧Psが到達して助勢限界となる。このときのストロークS及びホイールシリンダ圧(基礎液圧)Pbは、それぞれS0、Pb0である。助勢圧Psが助勢限界に達すると、アキュムレータ41の蓄圧によっては、基礎液圧Pbをこれ以上増加させることができなくなる。そのため、踏力FがF0を超えると、入力ピストン112で第1マスタピストン113を直接押圧してマスタシリンダ1の第1液圧室132及び第2液圧室136を加圧して、目標液圧制動力Fbtに応じた基礎液圧Pbをホイールシリンダ541〜544に付与することになる。反力室128の径方向断面積をSr、助勢圧室127の径方向断面積をSs、第1液圧室132及び第2液圧室136の径方向断面積をSbとすると、基礎液圧Pb、助勢圧Ps及び反力圧Prの関係は、下記数1で表すことができる。
(数1)
Pb×Sb=Ps×Ss−Pr×Sr+F
【0048】
従来において、助勢圧Psが助勢限界となり入力ピストン112で第1マスタピストン113を直接押圧する際には、運転者は、反力圧Prに基づく反力Pr×Srと、第1マスタピストン113からの基礎液圧Pbに基づく反力Pb×Sbと、を受けるため、運転者が受ける反力が増大する。図3では、この状態を曲線W31及び曲線W32で示している。助勢圧Psが助勢限界に到達している踏力F1になると、ストロークS及びホイールシリンダ圧(基礎液圧)Pbは、それぞれS1、Pb1になる。踏力Fがさらに増加しても、ストロークS及びホイールシリンダ圧(基礎液圧)Pbの増加は緩やかである。
【0049】
本実施形態では、助勢圧Psが助勢限界であることを示す所定条件が成立したことが助勢限界判定部61によって判定されると、切替制御部62は、切替弁3を開放状態に切替える。切替弁3が開放状態になると、反力室128のポート129からリザーバ32の方向へブレーキ液が排出されて、反力圧Prが無くなる。よって、上記数1に示す反力圧Prに基づく反力Pr×Srも無くなり、運転者が受ける反力が低減される。助勢圧Psが助勢限界を超えた以降は、ストロークSの増加に対して、運転者のブレーキ操作量に近いホイールシリンダ圧(基礎液圧)Pbの増加が得られる。したがって、助勢圧Psが助勢限界を超えた以降において、運転者の踏力Fを液圧制動力Fbとして効率的に利用することができる。図3では、この状態を曲線W33及び曲線W34で示している。踏力F1のとき、ストロークS及びホイールシリンダ圧(基礎液圧)Pbは、それぞれS2、Pb2であり、切替弁3を閉止状態のままにした既述の場合(S1、Pb1)と比べて、それぞれ大きくなっている。
【0050】
目標助勢圧演算部63は、ブレーキペダル115の操作量Sに応じて倍力装置4が発生する目標助勢圧Pstgを演算する。目標助勢圧演算部63は、ストロークセンサ72で検出されたブレーキ操作量Sに応じた目標助勢圧Pstgをマップ、テーブル又は演算式から求めることができる。ストロークSと目標助勢圧Pstgの関係を示すマップ、テーブル又は演算式は、予め試験等によって求められて、ブレーキECU6のメモリ内に格納されたプログラムに記憶されている。図4は、ストロークと助勢圧の関係を示しており、回生制動を行わない場合を曲線W41で示し、回生制動を行う場合を曲線W42で示している。例えば、バッテリの充電状況等によって回生制動が行えない場合は、ブレーキ操作量SがS3のときには、目標助勢圧PstgとしてPS41が出力される。回生制動を行う場合は、ブレーキ操作量SがS3のときには、目標助勢圧PstgとしてPS42が出力される。
【0051】
なお、目標助勢圧演算部63は、踏力センサ71又は反力圧Prを検出する圧力センサ73の検出値から目標助勢圧Pstgを求めることもできる。また、目標助勢圧演算部63は、これらのセンサの検出値を任意に組み合わせて、目標助勢圧Pstgを求めることもできる。この場合は、踏力F及び/又は反力圧Prが上述のストロークSに相当する。
【0052】
推定アキュムレータ圧演算部64は、アキュムレータ41に蓄積された圧力の推定値である推定アキュムレータ圧Paesを演算する。推定アキュムレータ圧演算部64は、推定アキュムレータ圧Paesを実アキュムレータ圧Par及び目標助勢圧Pstgに基づいて、マップ、テーブル又は演算式から求める。これらの関係を示すマップ、テーブル又は演算式は、予め試験等によって求められて、ブレーキECU6のメモリ内に格納されたプログラムに記憶されている。
【0053】
図5は、助勢圧とアキュムレータ圧の関係を示しており、実アキュムレータ圧ParがP73の場合を曲線W51で示し、実アキュムレータ圧ParがP72の場合を曲線W52で示している。実アキュムレータ圧ParがP73の場合は、目標助勢圧PstgがPs1のときには、推定アキュムレータ圧PaesとしてPa51が出力される。実アキュムレータ圧ParがP72の場合は、目標助勢圧PstgがPs1のときには、推定アキュムレータ圧PaesとしてPa52が出力される。
【0054】
(1−7)助勢限界の判定方法
ブレーキECU6は、メモリ内に格納されたプログラムを実行することによって、助勢圧Psが助勢限界であることを示す所定条件が成立したか否かを判定する。図6は、第1判定方法〜第3判定方法に係る助勢限界の判定手順を示すフローチャートの一例である。図7は、助勢圧及びアキュムレータ圧の時間変化を模式的に示した概略図であり、(A)は第1判定方法に係り、(B)は第2判定方法に係り、(C)は第3判定方法に係る。
【0055】
プログラムは、図6に示すフローに従って所定時間の経過毎に繰り返し実行される。ステップS11及びS12の判定は助勢限界判定部61が行い、ステップS13及びS14の処理は切替制御部62が行う。プログラムの初期値として、切替弁3は閉止状態にセットされている。
【0056】
まず、助勢限界判定部61は、切替弁3が開放状態であり、かつ、一制動操作中であるか否かを判定する(ステップS11)。一制動操作中とは、例えば、ストロークセンサ72で検出されたブレーキ操作量Sが経時的に所定量以上あるか否かによって判定される。具体的には、運転者によってブレーキペダル115が操作されて、ブレーキ操作量Sが所定量以上になると、助勢限界判定部61は、制動開始を記憶する。プログラムが繰り返される度にステップS11の判定が行われる。運転者がブレーキペダル115の操作を緩めて(止めて)ブレーキ操作量Sが所定量より小さくなると、助勢限界判定部61は、制動終了を記憶する。制動開始から制動終了までの期間が一制動操作中となる。
【0057】
切替弁3が開放状態であり、かつ、一制動操作中は、後述するステップS12〜S14における判定及び処理を行わずに、切替弁3の開放状態を保持する。一制動操作中に切替弁3が開放状態と閉止状態を繰り返すと、反力圧Prが急変する。切替弁3が開放状態にある場合には、一制動操作中はその状態を保持することによって、反力圧Prの急変を防止することができる。つまり、反力圧Prの急変によって、運転者のペダルフィーリングが悪化することを防止できる。
【0058】
ステップS11の条件を満たさない場合は、助勢限界判定部61は、助勢圧Psが助勢限界であるか否かを判定する(ステップS12)。助勢圧Psが助勢限界であるか否かの判定は、後述する第1判定方法〜第3判定方法のいずれかの方法によって判定される。ステップS12で助勢圧Psが助勢限界であると判定されると、切替制御部62は、切替弁3を開放状態に切替える(ステップS13)。助勢限界であると判定されない場合は、切替制御部62は、切替弁3が開放状態にある場合は切替弁3を閉止状態にする。切替弁3が閉止状態にある場合は、閉止状態を保持する(ステップS14)。そして、ステップS13又はステップS14の処理の後、本ルーチンを一旦終了する。なお、一制動操作の制動終了により切替弁3を閉止状態にする場合は、入力ピストン112がシリンダ111の基端部側に移動するのに伴って、リザーバ32から反力室128のポート129の方向へブレーキ液が供給される。ブレーキ液が供給された後、切替弁3が閉止状態にされる。以下、第1判定方法〜第3判定方法について説明する。
【0059】
(第1判定方法)
第1判定方法は、アキュムレータ41の実アキュムレータ圧Parと倍力装置4が現実に発生した実助勢圧Psrとの差が第1所定値未満であるときに、助勢限界判定部61は、助勢圧Psが助勢限界であると判定する。実アキュムレータ圧Parは、圧力センサ75の検出値を用いる。実助勢圧Psrは、圧力センサ74の検出値を用いる。第1所定値は0であることが望ましいが、本発明の目的を達することができる程度の任意の所定値にすることができる。つまり、本判定方法では、実助勢圧Psrが助勢限界であることが判定可能な第1所定値を設けることができる。第1所定値は、計算機シミュレーション、試験等によって予め算出しておくこともできる。
【0060】
また、本判定方法では、第1所定値は実アキュムレータ圧Parの脈動分に相当する圧力変動分とすることもできる。実アキュムレータ圧Parが脈動すると、脈動する下限圧が実助勢圧Psrと等しくなるときに助勢限界となる。よって、実アキュムレータ圧Parの脈動分に相当する第1所定値を設けておくことにより、アキュムレータ41の圧力脈動分を加味した助勢限界の判定を行うことができる。したがって、実アキュムレータ圧Parが脈動しても、正確に助勢限界の判定を行うことができる。
【0061】
本判定方法では、実アキュムレータ圧Parと現実に発生した実助勢圧Psrとに基づいて助勢限界の判定を行うので、助勢圧Psが現実に助勢限界に到達したときに反力圧Prを開放することができる。そのため、倍力装置4は、アキュムレータ41に蓄圧された圧力エネルギーを最大限に使用して助勢圧Psを発生させることができる。
【0062】
図7(A)は、実助勢圧Psrの時間変化を曲線W71で示し、実アキュムレータ圧Parの時間変化を曲線W72で示している。実助勢圧Psrが増加するにつれて実アキュムレータ圧Parは減少して、時刻t1において、実アキュムレータ圧Parと実助勢圧Psrとは等しくなり、助勢限界液圧Psmとなる。助勢限界判定部61は、実アキュムレータ圧Parと実助勢圧Psrとの差を演算して、その差が第1所定値0であるので、助勢圧Psが助勢限界であると判定する。
【0063】
(第2判定方法)
第2判定方法は、実アキュムレータ圧Parと目標助勢圧Pstgとの差が第2所定値未満であるときに、助勢限界判定部61は、助勢圧Psが助勢限界であると判定する。実アキュムレータ圧Parは、圧力センサ75の検出値を用いる。目標助勢圧Pstgは、目標助勢圧演算部63の演算結果であり、ブレーキペダル115の操作量Sに応じて演算され、助勢圧Psの指令値に相当する。第2所定値は0であることが望ましいが、本発明の目的を達することができる程度の任意の所定値にすることができる。つまり、本判定方法では、目標助勢圧Pstgが助勢限界であることが判定可能な第2所定値を設けることができる。第2所定値は、計算機シミュレーション、試験等によって予め算出しておくこともできる。
【0064】
助勢圧Psは、アキュムレータ41に蓄圧された液圧を増圧用リニア弁44及び減圧用リニア弁45で調圧して形成される。そのため、運転者によってブレーキペダル115が操作されて目標助勢圧Pstgが設定されてから、実助勢圧Psrが目標助勢圧Pstgに到達するまでにタイムラグが生じる。例えば、急制動要求やABS制御の場合は、短時間に大きな制動力が必要となるので、実アキュムレータ圧Parと実助勢圧Psrとに基づいて判定を行うと助勢限界と判定されない場合であっても、すぐに実助勢圧Psrが急増して助勢限界を迎える場合もある。本判定方法では、実アキュムレータ圧Parと目標助勢圧Pstgとに基づいて助勢限界の判定を行うので、助勢圧Psの将来の増減を予測した助勢限界の判定を行うことができる。
【0065】
図7(B)は、実助勢圧Psrの時間変化を曲線W73で示し、目標助勢圧Pstgの時間変化を曲線W74で示し、実アキュムレータ圧Parの時間変化を曲線W75で示している。実助勢圧Psrは、目標助勢圧Pstgに遅れて増加している。実アキュムレータ圧Parは実助勢圧Psrの増加につれて減少している。時刻t2になると、実アキュムレータ圧Parと目標助勢圧Pstgとの差が第2所定値0となり、助勢限界判定部61は、助勢圧Psが助勢限界であると判定する。時刻t2以降の実助勢圧Psrの時間変化を破線W73aで示し、目標助勢圧Pstgの時間変化を破線W74aで示し、実アキュムレータ圧Parの時間変化を破線W75aで示す。時刻t2以降、目標助勢圧Pstgの増加に従って、実助勢圧Psrも増加する。すると、すぐに実助勢圧Psrと実アキュムレータ圧Parは等しくなり、助勢限界液圧Psmとなる。時刻t2において、目標助勢圧Pstgから実助勢圧Psrの増加が予測され、実アキュムレータ圧Parと目標助勢圧Pstgとに基づいて助勢限界の判定を行うと、実助勢圧Psrが助勢限界を迎えることが予測される。そのため、時刻t2において、助勢限界判定部61は、助勢圧Psが助勢限界であると判定する。
【0066】
(第3判定方法)
第3判定方法は、推定アキュムレータ圧Paesと目標助勢圧Pstgとの差が第3所定値未満であるときに、助勢圧Psが助勢限界であると判定する。目標助勢圧Pstgは、目標助勢圧演算部63の演算結果であり、ブレーキペダル115の操作量Sに応じて演算され、助勢圧Psの指令値に相当する。推定アキュムレータ圧Paesは、推定アキュムレータ圧演算部64の演算結果であり、実アキュムレータ圧Par及び目標助勢圧Pstgに応じて算出され、アキュムレータ圧Paの推定値(予測値)である。第3所定値は0であることが望ましいが、本発明の目的を達することができる程度の任意の所定値にすることができる。つまり、本判定方法では、目標助勢圧Pstgが助勢限界であることが判定可能な第3所定値を設けることができる。第3所定値は、計算機シミュレーション、試験等によって予め算出しておくこともできる。
【0067】
図7(C)は、目標助勢圧Pstgの時間変化を曲線W76で示し、実アキュムレータ圧Parの時間変化を曲線W77及びW78で示している。曲線W77は、時刻t3において実アキュムレータ圧ParがP72である場合を示している。曲線W78は、時刻t3において実アキュムレータ圧ParがP73である場合を示している。時刻t3までは、目標助勢圧Pstg及び実アキュムレータ圧Parは、それぞれ一定圧力で推移している。時刻t3になると、目標助勢圧Pstgは、急増してPs1になる。例えば、第2判定方法で既述の急制動要求やABS制御の場合が挙げられる。Ps1は、助勢限界液圧Psmであるとする。時刻t3以降の目標助勢圧Pstgの時間変化を破線W76aで示す。時刻t3以降の実アキュムレータ圧Parの時間変化を破線W77a及びW78aで示す。
【0068】
まず、時刻t3において実アキュムレータ圧ParがP72のときを考える。既述のとおり、推定アキュムレータ圧演算部64は、目標助勢圧PstgがPs1に対する推定アキュムレータ圧Paesとして、Pa52を出力する。助勢限界判定部61は、Pa52とPs1の差dを演算する。差dは第3所定値0より小さいので、助勢限界判定部61は、助勢圧Psが助勢限界であると判定する。一方、時刻t3において実アキュムレータ圧ParがP73の場合は、推定アキュムレータ圧演算部64は、目標助勢圧PstgがPs1に対する推定アキュムレータ圧Paesとして、Pa51を出力する。助勢限界判定部61は、Pa51とPs1の差eを演算する。差eは第3所定値0より大きいので、助勢限界判定部61は、助勢圧Psが助勢限界であると判定しない。
【0069】
本判定方法では、実アキュムレータ圧Par及び実助勢圧Psrが増減を始める前の時刻t3において、推定アキュムレータ圧Paesと目標助勢圧Pstgとに基づいて助勢限界の判定を行う。そのため、アキュムレータ圧Pa及び助勢圧Psの将来の増減を予測した助勢限界の判定を行うことができる。
【0070】
(第4判定方法)
次に、第4判定方法について説明する。第4判定方法は、第1判定方法に係る助勢限界の判定手順と基本的には同様の判定手順を有する。共通する手順には共通の符号を付し、異なる部分を中心に説明する。図8は、第4判定方法に係る助勢限界の判定手順を示すフローチャートの一例である。本判定方法は、第1判定方法と比べて、ステップS12の条件を満たす場合に、ステップS12aの判定を行う点が異なる。
【0071】
ステップS12において、助勢圧Psが助勢限界であると判定された場合、助勢限界判定部61は、目標助勢圧Pstgが推定アキュムレータ圧Paesより小さいか否かを判定する(ステップS12a)。目標助勢圧Pstgが推定アキュムレータ圧Paesより小さい場合は、切替制御部62は、切替弁3を閉止状態に維持する(ステップS14)。一方、目標助勢圧Pstgが推定アキュムレータ圧Paes以上の場合は、切替制御部62は、切替弁3を開放状態に切替える(ステップS13)。目標助勢圧Pstg及び推定アキュムレータ圧Paesは、第3判定方法で既述の目標助勢圧Pstg及び推定アキュムレータ圧Paesと同様である。
【0072】
本判定方法は、第1判定方法と同様に、アキュムレータ41の実アキュムレータ圧Parと倍力装置4が現実に発生した実助勢圧Psrとの差が第1所定値未満であるときに、助勢圧Psが助勢限界であると判定する。そして、助勢圧Psが助勢限界であると判定された場合に、目標助勢圧Pstgが推定アキュムレータ圧Paesより小さい場合は、切替制御部62が切替弁3を閉止状態に維持する。例えば、運転者のブレーキペダル115の操作量Sや踏力Fが小さくなった場合は、実助勢圧Psrの減少が見込まれる。また、アキュムレータ41のポンプ駆動用モータ43が駆動されて、アキュムレータ41に圧力エネルギーが補給されているときは、実アキュムレータ圧Parの上昇が見込まれる。そこで、実アキュムレータ圧Parと実助勢圧Psrとに基づいて助勢圧Psが助勢限界であると判定された場合であっても、目標助勢圧Pstgが推定アキュムレータ圧Paesより小さい場合は、切替制御部62は、切替弁3を閉止状態に維持する。助勢圧Psの助勢限界が解消される可能性が高い場合は、切替弁3の閉止状態を維持することによって、反力発生装置2は、その後も運転者のブレーキ操作量Sに応じた反力圧Prを反力室128に発生させることができる。
【0073】
(2)第2実施形態
第2実施形態の車両用制動装置は、第1実施形態の車両用制動装置と基本的には同様の構成、作用効果を有する。共通する部位には共通の符号を付し、異なる部分を中心に説明する。本実施形態は、第1実施形態と比べて、反力発生装置2及び倍力装置4が異なる。図9は本実施形態に係る反力発生装置及び倍力装置の概略構成図を示している。
【0074】
助勢圧室127のポート133は、リニア弁である助勢圧室流入調整弁V1、逆止弁Vbを介してアキュムレータ(Acc)40の流出入口に配管45a、45b、45cで連結されると共に、リニア弁である助勢圧室流出調整弁V2を介してリザーバ32に配管45a、45d、45eで連結されている。
【0075】
アキュムレータ40の流出入口には、配管45cから分岐された配管45fで逆止弁Vaを介して液圧ポンプ39の吐出口が連結されている。また、配管45cから分岐された配管45hは、リニア弁である反力室流入調整弁V3の一方の口に連結されている。逆止弁Vaは液圧ポンプ39からアキュムレータ40への流れのみを許容する状態で介挿されている。逆に逆止弁Vaは、アキュムレータ40から吐出される圧力が液圧ポンプ39側に行かないように阻止する。
【0076】
液圧ポンプ39には、液圧ポンプ駆動用のモータ41が連結され、更に、液圧ポンプ39の流入口は、逆止弁Vcを介してリザーバ32に配管45gで連結されている。逆止弁Vcはリザーバ32から液圧ポンプ39の流入口への流れのみを許容する状態で介挿されている。
【0077】
また、反力室流入調整弁V3の他方の口は、配管45i、130を介して反力室128のポート129に連結されている。従って、反力室128のポート129は、配管130、45i、反力室流入調整弁V3、配管45h、45c、45f及び逆止弁Vaを介して液圧ポンプ39に連結されている。また、ポート129は、リニア弁である反力室流出調整弁V4を介してリザーバ32に配管130、45eで連結されている。なお、助勢圧室流入調整弁V1、助勢圧室流出調整弁V2、反力室流入調整弁V3及び反力室流出調整弁V4を、単にリニア弁V1〜V4ともいう。
【0078】
更に、反力室流入調整弁V3と反力室流出調整弁V4とを連結する配管45iの途中と、リザーバ32に連結された配管45eの途中とはリリーフ弁Vdを介して配管45kで連結されている。配管45eの途中と、アキュムレータ40と助勢圧室流入調整弁V1とを連結する配管45cの途中とはリリーフ弁Veを介して配管45mで連結されている。これらリリーフ弁Vd、Veは、反力室128並びにアキュムレータ40に所定以上の圧力が掛かると破損するので、その所定以上の圧力をリザーバ32へ逃がして破損を防止するためのものである。
【0079】
アキュムレータ40の流出入口に接続された配管45cには、アキュムレータ40に蓄圧された圧力エネルギー(実アキュムレータ圧Par)を検出する圧力センサP1が設けられ、助勢圧室127のポート133に連結された配管45aには、助勢圧室127内の液圧を検出する圧力センサP2が設けられ、反力室128のポート129に連結された配管130には、反力室128内の液圧を検出する圧力センサP3が設けられている。
【0080】
アキュムレータ40は、液圧ポンプ39により発生した液圧を蓄圧するものであり、この蓄圧された液圧が助勢圧室流入調整弁V1を介して助勢圧室127へ供給されることにより液圧制動力Fbが得られるようになっている。実アキュムレータ圧Parが所定値以下に低下したことが圧力センサP1によって検出されると、ブレーキECU6の制御信号に基づいて、モータ41が駆動されて、液圧ポンプ39は、アキュムレータ40にブレーキ液を供給してアキュムレータ40に蓄圧された圧力エネルギーを補給する。また、アキュムレータ40は、液圧ポンプ39が吐出したブレーキ液の脈動を緩和することもできる。
【0081】
各リニア弁V1〜V4は、流量調整式の電磁弁であり、各リニア弁V1〜V4の絞り抵抗をブレーキECU6からの制御信号に基づいて制御することにより、助勢圧室127及び反力室128の液圧を調圧することができる。助勢限界判定部61によって、助勢圧Psが助勢限界であると判定されると、切替制御部62は、切替弁3を開放状態に切替える。このとき、反力室流入調整弁V3及び反力室流出調整弁V4の絞り抵抗を最大にして、反力室流入調整弁V3及び反力室流出調整弁V4を閉止しておくのが好ましい。
【0082】
なお、助勢限界判定部61によって、助勢圧Psが助勢限界であると判定されたときに、反力室流出調整弁V4の絞り抵抗を最小にして反力室流出調整弁V4を開放状態にすることにより、切替弁3を開放状態に切替えることと同様の効果を得ることもできる。この場合は、切替弁3を省略することができる。
【0083】
(3)その他
本発明は上記し且つ図面に示した実施形態のみに限定されるものではなく、要旨を逸脱しない範囲内で適宜変更して実施可能である。
【符号の説明】
【0084】
1:マスタシリンダ
112:入力ピストン 113、114:マスタピストン
128:反力室 127:助勢圧室 132、136:液圧室
2:反力発生装置
3:切替弁 31:開放路 32:リザーバ
4:倍力装置 41:アキュムレータ
5:ブレーキ
541、542、543、544:ホイールシリンダ
5FR、5FL、5RR、5RL:車輪
6:ブレーキECU
61:助勢限界判定部 62:切替制御部
63:目標助勢圧演算部 64:推定アキュムレータ圧演算部
Pr:反力圧
Ps:助勢圧 Psr:実助勢圧 Pstg:目標助勢圧
Par:実アキュムレータ圧 Paes:推定アキュムレータ圧
Pb:基礎液圧
【特許請求の範囲】
【請求項1】
ブレーキペダルの操作に連動して軸線方向に摺動する入力ピストンが入力シリンダ穴に内嵌され、前記入力ピストンの前進方向に離間距離を有して配置され前記入力ピストンに対し独立して前記軸線方向に摺動するマスタピストンが加圧シリンダ穴に内嵌されたマスタシリンダと、
前記入力シリンダ穴の底部と前記入力ピストンの前端面とで区画された反力室と連通し、前記入力ピストンの移動量に応じた反力圧を前記反力室に発生させる反力発生装置と、
前記反力室と前記反力発生装置とを連通する液路から分岐されてリザーバに連通する開放路に設けられた切替弁と、
アキュムレータに蓄積された実アキュムレータ圧のブレーキ液を前記ブレーキペダルの踏力または操作量に応じて制御することによって助勢圧を発生し、前記加圧シリンダ穴を前記マスタピストンの後方側で区画して形成された助勢圧室に前記助勢圧を供給することで前記踏力を倍力した推力を前記マスタピストンに作用させる倍力装置と、
前記加圧シリンダ穴を前記マスタピストンの前方側で区画して形成され前記マスタピストンの前進に応じて基礎液圧を発生する液圧室に連通するホイールシリンダを有する車輪のブレーキと、
前記倍力装置が発生する前記助勢圧が助勢限界であることを示す所定条件が成立したか否かを判定する助勢限界判定部と、
前記所定条件が成立したことが前記助勢限界判定部によって判定されると、前記切替弁を開放状態に切替える切替制御部と、
を備えることを特徴とする車両用制動装置。
【請求項2】
前記所定条件は、前記実アキュムレータ圧と前記倍力装置が現実に発生した実助勢圧との差が第1所定値未満となることである請求項1に記載の車両用制動装置。
【請求項3】
前記ブレーキペダルの踏力または操作量に応じて前記倍力装置が発生する目標助勢圧を演算する目標助勢圧演算部を設け、
前記所定条件は、前記実アキュムレータ圧と前記目標助勢圧との差が第2所定値未満となることである請求項1に記載の車両用制動装置。
【請求項4】
前記ブレーキペダルの踏力または操作量に応じて前記倍力装置が発生する目標助勢圧を演算する目標助勢圧演算部と、
前記アキュムレータに蓄積された圧力の推定値である推定アキュムレータ圧を演算する推定アキュムレータ圧演算部と、を設け、
前記所定条件は、前記推定アキュムレータ圧と前記目標助勢圧との差が第3所定値未満となることである請求項1に記載の車両用制動装置。
【請求項5】
前記ブレーキペダルの踏力または操作量に応じて前記倍力装置が発生する目標助勢圧を演算する目標助勢圧演算部と、
前記アキュムレータに蓄積された圧力の推定値である推定アキュムレータ圧を演算する推定アキュムレータ圧演算部と、を設け、
前記目標助勢圧が前記推定アキュムレータ圧より小さい場合は、前記切替制御部は前記切替弁を閉止状態に維持する請求項2に記載の車両用制動装置。
【請求項6】
前記切替制御部は、前記ブレーキペダルの操作が継続する一制動操作中は、前記切替弁を開放状態に切替えた後に前記所定条件が成立しないことが前記助勢限界判定部によって判定されても、前記切替弁を開放状態に維持する請求項1〜5のいずれか1項に記載の車両用制動装置。
【請求項1】
ブレーキペダルの操作に連動して軸線方向に摺動する入力ピストンが入力シリンダ穴に内嵌され、前記入力ピストンの前進方向に離間距離を有して配置され前記入力ピストンに対し独立して前記軸線方向に摺動するマスタピストンが加圧シリンダ穴に内嵌されたマスタシリンダと、
前記入力シリンダ穴の底部と前記入力ピストンの前端面とで区画された反力室と連通し、前記入力ピストンの移動量に応じた反力圧を前記反力室に発生させる反力発生装置と、
前記反力室と前記反力発生装置とを連通する液路から分岐されてリザーバに連通する開放路に設けられた切替弁と、
アキュムレータに蓄積された実アキュムレータ圧のブレーキ液を前記ブレーキペダルの踏力または操作量に応じて制御することによって助勢圧を発生し、前記加圧シリンダ穴を前記マスタピストンの後方側で区画して形成された助勢圧室に前記助勢圧を供給することで前記踏力を倍力した推力を前記マスタピストンに作用させる倍力装置と、
前記加圧シリンダ穴を前記マスタピストンの前方側で区画して形成され前記マスタピストンの前進に応じて基礎液圧を発生する液圧室に連通するホイールシリンダを有する車輪のブレーキと、
前記倍力装置が発生する前記助勢圧が助勢限界であることを示す所定条件が成立したか否かを判定する助勢限界判定部と、
前記所定条件が成立したことが前記助勢限界判定部によって判定されると、前記切替弁を開放状態に切替える切替制御部と、
を備えることを特徴とする車両用制動装置。
【請求項2】
前記所定条件は、前記実アキュムレータ圧と前記倍力装置が現実に発生した実助勢圧との差が第1所定値未満となることである請求項1に記載の車両用制動装置。
【請求項3】
前記ブレーキペダルの踏力または操作量に応じて前記倍力装置が発生する目標助勢圧を演算する目標助勢圧演算部を設け、
前記所定条件は、前記実アキュムレータ圧と前記目標助勢圧との差が第2所定値未満となることである請求項1に記載の車両用制動装置。
【請求項4】
前記ブレーキペダルの踏力または操作量に応じて前記倍力装置が発生する目標助勢圧を演算する目標助勢圧演算部と、
前記アキュムレータに蓄積された圧力の推定値である推定アキュムレータ圧を演算する推定アキュムレータ圧演算部と、を設け、
前記所定条件は、前記推定アキュムレータ圧と前記目標助勢圧との差が第3所定値未満となることである請求項1に記載の車両用制動装置。
【請求項5】
前記ブレーキペダルの踏力または操作量に応じて前記倍力装置が発生する目標助勢圧を演算する目標助勢圧演算部と、
前記アキュムレータに蓄積された圧力の推定値である推定アキュムレータ圧を演算する推定アキュムレータ圧演算部と、を設け、
前記目標助勢圧が前記推定アキュムレータ圧より小さい場合は、前記切替制御部は前記切替弁を閉止状態に維持する請求項2に記載の車両用制動装置。
【請求項6】
前記切替制御部は、前記ブレーキペダルの操作が継続する一制動操作中は、前記切替弁を開放状態に切替えた後に前記所定条件が成立しないことが前記助勢限界判定部によって判定されても、前記切替弁を開放状態に維持する請求項1〜5のいずれか1項に記載の車両用制動装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【公開番号】特開2012−214121(P2012−214121A)
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願番号】特願2011−80921(P2011−80921)
【出願日】平成23年3月31日(2011.3.31)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
【公開日】平成24年11月8日(2012.11.8)
【国際特許分類】
【出願日】平成23年3月31日(2011.3.31)
【出願人】(301065892)株式会社アドヴィックス (1,291)
【Fターム(参考)】
[ Back to top ]