
車両用制御装置、特定物体判別装置、特定物体判別方法、特定物体判別プログラム
【課題】レーダーによって検知された物体の性質と車両の走行環境に応じた適切な衝突安全制御を行うことが可能な車両用制御装置を提供すること。
【解決手段】位置情報出力手段により出力された反射点の位置情報に基づき、反射点を含む物体との衝突を回避又は緩和するための安全制御を行う衝突安全制御手段と、車両の進行方向に直交する方向に関する反射点の変化量が所定量未満である状態が継続すると増加する傾向の指標値を算出し、指標値が閾値を超える場合に当該反射点についての衝突安全制御を行わないように衝突安全制御手段に指示する衝突安全制御キャンセル手段と、を備え、衝突安全制御キャンセル手段は、車両がカーブ路の入口付近を走行していると判定された場合に、車両がカーブ路の入口付近を走行していないと判定された場合に比して、閾値を大きくする車両用制御装置。
【解決手段】位置情報出力手段により出力された反射点の位置情報に基づき、反射点を含む物体との衝突を回避又は緩和するための安全制御を行う衝突安全制御手段と、車両の進行方向に直交する方向に関する反射点の変化量が所定量未満である状態が継続すると増加する傾向の指標値を算出し、指標値が閾値を超える場合に当該反射点についての衝突安全制御を行わないように衝突安全制御手段に指示する衝突安全制御キャンセル手段と、を備え、衝突安全制御キャンセル手段は、車両がカーブ路の入口付近を走行していると判定された場合に、車両がカーブ路の入口付近を走行していないと判定された場合に比して、閾値を大きくする車両用制御装置。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車載レーダー装置の出力に基づいて衝突回避制御やプリクラッシュ制御(衝突予防安全制御)を行う車両用制御装置、並びに当該車両用制御装置に用いられる特定物体判別装置、特定物体判別方法、特定物体判別プログラムに関する。
【背景技術】
【0002】
従来、車両に搭載されたレーダー装置の出力に基づき車両と障害物の位置関係を認識し、衝突可能性がある場合に自動的にブレーキ出力を行ったり、予めエアバッグを展開したりする(以下、衝突安全制御と総称する)技術が実用化されている。このような技術においては、橋の継ぎ目、工事用の鉄板、溝の蓋(グレーチング)等の高さの低い(車両が乗り越えられる)路上金属物を正確に認識し、ブレーキ出力等を行わないようにすることが必要とされる。
【0003】
特許文献1には、電磁波の反射点の位置に基づき物体の幅を算出し、更に複数の反射点の位置に基づき物体の代表点の位置を設定し、反射点又は代表点の位置の変化量に基づき物体の自車幅方向の相対速度となる横相対速度を算出する車両用物体検知装置について記載されている。この車両用物体検知装置では、所定周期毎に検知された物体の検知履歴に基づき、物体が静止物であると判定され、かつ、物体の幅の増大量が所定値よりも大きい場合に、横相対速度算出手段により算出される横相対速度を補正している。
【0004】
また、特許文献2には、ステアリングホイールの操作が検出されなかったときに障害物を回避するための接触回避支援制御を行う車両用接触回避支援装置であって、車両が走行中の道路が、車幅方向に所定角度以上の傾斜角を持つバンクを有するカーブ路であるか否かを判断し、バンクを有するカーブ路を走行していると判断した場合に、接触余裕値としての接触予定時間の閾値をより小さい値に設定するか、接触回避支援を行わないようにする車両用接触回避支援装置について記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−261897号公報
【特許文献2】特開2011−051572号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に記載の装置では、静止物を認識した結果として横相対速度の補正を行うのみであり、衝突安全制御に実施が必要な場面であるか、そうでないかを適切に判断できない場合がある。
【0007】
また、特許文献2に記載の装置は、あくまでステアリングホイールの操作が検出されなかったときに衝突安全制御を行う装置であるため、衝突安全制御を抑制する条件が、バンクを有するカーブ路、すなわち操舵操作をしなくても車両が旋回可能な場面に限定されている。このため、他の様々な走行環境に適用することができない。
【0008】
本発明は、一側面によれば、レーダーによって検知された物体の性質と車両の走行環境に応じた適切な衝突安全制御を行うことが可能な車両用制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するための本発明の一態様は、
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段と、
前記位置情報出力手段により出力された反射点の位置情報に基づき、該反射点を含む物体との衝突を回避又は緩和するための安全制御を行う衝突安全制御手段と、
前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加する傾向の指標値を算出し、該指標値が閾値を超える場合に当該反射点についての衝突安全制御を行わないように前記衝突安全制御手段に指示する衝突安全制御キャンセル手段と、
前記車両がカーブ路の入口付近を走行しているか否かを判定するカーブ路走行判定手段と、を備え、
前記衝突安全制御キャンセル手段は、前記カーブ路走行判定手段により前記車両がカーブ路の入口付近を走行していると判定された場合に、前記車両がカーブ路の入口付近を走行していないと判定された場合に比して、前記閾値を大きくすることを特徴とする、
車両用制御装置である。
【0010】
この本発明の一態様によれば、車両の進行方向に直交する方向に関する反射点の変化量が所定量未満である状態が継続すると増加する傾向の指標値を算出し、指標値が閾値を超える場合に当該反射点についての衝突安全制御を行わないように前記衝突安全制御手段に指示する衝突安全制御キャンセル手段が、車両がカーブ路の入口付近を走行していると判定された場合に、車両がカーブ路の入口付近を走行していないと判定された場合に比して、閾値を大きくするため、レーダーによって検知された物体の性質と車両の走行環境に応じた適切な衝突安全制御を行うことが可能な車両用制御装置を提供することができる。
【0011】
本発明の第2の態様は、
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段と、
前記反射点の反射強度分布に統計上の特異点が存在せず且つ前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加し、前記反射点の反射強度分布に前記統計上の特異点が存在する場合に減少するように、前記反射点が特定の物体に含まれる可能性を示す指標値を算出する指標値算出手段と、
前記指標値算出手段により算出された指標値が閾値を超える場合に、前記反射点が特定の物体であると判定する判定手段と、
を備える特定物体判別装置である。
【0012】
本発明の第2の態様によれば、反射点の反射強度分布に統計上の特異点が存在せず且つ車両の進行方向に直交する方向に関する反射点の変化量が所定量未満である状態が継続すると増加し、反射点の反射強度分布に統計上の特異点が存在する場合に減少するように、反射点が特定の物体に含まれる可能性を示す指標値を算出し、算出された指標値が閾値を超える場合に、反射点が特定の物体であると判定するため、レーダーによって検知された物体の性質を正確に判別することができる。
【0013】
本発明の第3の態様は、
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段の出力をコンピュータが解析して、前記反射点が特定の物体に含まれるか否かを判別する特定物体判別方法であって、
前記反射点の反射強度分布に統計上の特異点が存在するか否かを判定する処理と、
前記反射点の反射強度分布に統計上の特異点が存在せず且つ前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加し、前記反射点の反射強度分布に統計上の特異点が存在する場合に減少するように、前記反射点が特定の物体に含まれる可能性を示す指標値を算出する処理と、
前記指標値算出手段により算出された指標値が閾値を超える場合に、前記反射点が特定の物体に含まれると判定する処理と、
をコンピュータが実行する特定物体判別方法である。
【0014】
本発明の第4の態様は、
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段の出力をコンピュータに解析させ、前記反射点が特定の物体に含まれるか否かを判別させる特定物体判別プログラムであって、
前記反射点の反射強度分布に統計上の特異点が存在するか否かを判定する処理と、
前記反射点の反射強度分布に統計上の特異点が存在せず且つ前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加し、前記反射点の反射強度分布に統計上の特異点が存在する場合に減少するように、前記反射点が特定の物体に含まれる可能性を示す指標値を算出する処理と、
前記指標値算出手段により算出された指標値が閾値を超える場合に、前記反射点が特定の物体に含まれると判定する処理と、
をコンピュータに実行させる特定物体判別プログラムである。
【発明の効果】
【0015】
本発明は、一側面によれば、レーダーによって検知された物体の性質に応じた適切な衝突安全制御を行うことが可能な車両用制御装置を提供することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施例に係る車両用制御装置1のシステム構成例である。
【図2】理想環境下において、路上金属物と他車両における同一の反射点による反射波の反射強度分布の相違を示すヒストグラムである。
【図3】実環境下において、他車両による反射波の反射強度分布を示すヒストグラムである。
【図4】他車両による反射波の反射強度分布が変動する走行環境を例示した図である。
【図5】他車両による反射波の反射強度分布が変動する走行環境を例示した図である。
【図6】本実施例のシステムECU50により実行される処理の流れを示すフローチャートである。
【図7】自車両の前方を走行する先行車両による反射点の位置変化と、路上金属物による反射点の位置変化を示す図である。
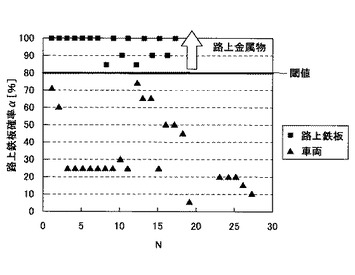
【図8】実際に他車両と路上金属物に対してレーダー装置を作動させ、路上鉄板確率αを算出した結果を示す図である。
【図9】カーブ路の入口付近において路側に電柱が存在する走行場面を示す図である。
【図10】本発明の変形例に係る車両用制御装置1*のシステム構成例である。
【発明を実施するための形態】
【0017】
以下、本発明を実施するための形態について、添付図面を参照しながら実施例を挙げて説明する。
【実施例】
【0018】
以下、図面を参照し、本発明の一実施例に係る車両用制御装置について説明する。
【0019】
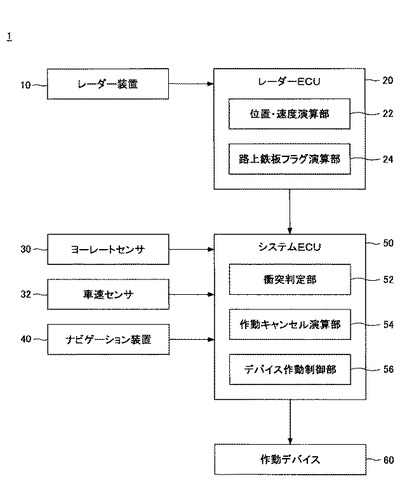
図1は、本発明の一実施例に係る車両用制御装置1のシステム構成例である。車両用制御装置1は、主要な構成として、レーダー装置10と、レーダーECU(Electronic Control Unit)20と、ヨーレートセンサ30、車速センサ32と、ナビゲーション装置40と、システムECU50と、作動デバイス60と、を備える。
【0020】
レーダー装置10は、例えばミリ波レーダーであり、車両用制御装置1が搭載される自車両のフロント部に取り付けられ、自車両の前方に存在する障害物を検出する。レーダー装置10は、電磁波を車両前方に放射する送信アンテナ、送信アンテナに供給する送信信号を生成する信号生成部、電磁波が障害物により反射されて帰還する反射波を受信する受信アンテナ等を備える。送信アンテナは、受信アンテナと一体型のものが用いられてもよい。本発明の適用上、レーダー装置10の方式は如何なるものでもよいが、例えばFM−CW方式等が採用される。
【0021】
FM−CW方式とは、周波数が漸次増減する送信信号と受信信号をミキシングすることによりビート信号を発生させ、ビート信号の周波数(ビート周波数)を、送信信号の周波数が増加する上昇部と周波数が減少する下降部の区間毎に特定し、上昇部のビート周波数と下降部のビート周波数に基づいてDBM(Digital Beam Forming)等を適用することにより、測定対象物(障害物)との距離、方位、相対速度を測定する方式である。
【0022】
レーダーECU20は、例えば、CPU(Central Processing Unit)を中心としてROM(Read Only Memory)、RAM(Random Access Memory)等のメモリ装置32がバスを介して相互に接続されたマイクロコンピュータであり、その他、HDD(Hard Disc Drive)やDVD−R(Digital Versatile Disk‐Recordable)ドライブ、CD−R(Compact Disc‐Recordable)ドライブ、EEPROM(Electronically Erasable and Programmable Read Only Memory)等の補助記憶装置やI/Oポート、タイマー、カウンター等を備える。補助記憶装置には、CPUが実行するプログラムやデータが格納されている。
【0023】
レーダーECU20は、CPUがプログラムを実行することにより機能する機能ブロックとして、上記FM−CW方式における各種演算を行い、障害物において電磁波を反射した反射点毎の位置(距離及び方位)、自車両との相対速度を算出する位置・速度演算部22と、反射点毎に、反射波の反射強度分布に基づいて路上鉄板フラグのオン/オフを切り替える路上鉄板フラグ演算部24と、を備える。
【0024】
ここで、路上鉄板フラグとは、本来衝突安全制御の対象としないことが望ましい、橋の継ぎ目、工事用の鉄板、溝の蓋(グレーチング)等の高さの低い(車両が乗り越えられる)路上金属物である可能性が高いことを示すフラグであり、RAM等の所定領域にオン又はオフを示す値を書き込むことにより設定される。
【0025】
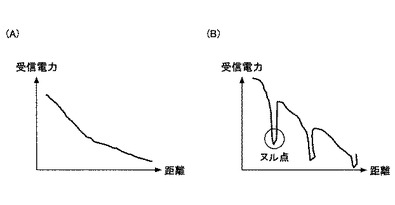
図2は、理想環境下において、路上金属物と他車両における同一の反射点による反射波の反射強度分布の相違を示すヒストグラムである。図中、横軸は自車両と反射点との距離を示す。反射強度は、レーダー装置10の受信アンテナの受信電力によって表される。
【0026】
ここで、「同一の反射点」とは、レーダー装置10が繰り返し反射波の受信を行う中で、前回との位置変動が所定値以内に収まる一連の反射点をいう。以下、これを前提として説明する。
【0027】
図2(A)は路上金属物による反射波の反射強度分布を示し、図2(B)は他車両による反射波の反射強度分布を示す。このように、同一の反射点における受信電力と距離の関係を示す反射強度分布を解析することにより、障害物が路上金属物であるか、他車両その他の安全制御の対象となる物体であるかを、ある程度判別することができる。路上鉄板フラグ演算部24は、例えば、反射波の反射強度分布を示すヒストグラムにおいて、図2(B)に示すヌル点(統計上の特異点)が検出された場合に路上鉄板フラグをオフに設定し、検出されなかった場合に路上鉄板フラグをオンに設定する。より具体的には、反射波の反射強度分布を示すヒストグラムにおいて、ある微小距離区間における反射強度の分散或いは最大値と最小値の差が所定値以上であればヌル点が検出されたと判定し、ヒストグラムの全区間に亘り微小距離区間における反射強度の分散或いは最大値と最小値の差が所定値未満であればヌル点が検出されなかったと判定する(その他種々の手法が考えられ、これに限定されない)。
【0028】
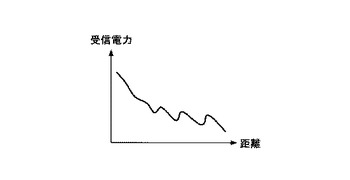
しかしながら、現実的には、他車両による反射波の反射強度分布は、図2(B)に示すものとはならず、図3に示すような容易に図2(A)の反射強度分布と判別できないものとなる場合がある。図3は、実環境下において、他車両による反射波の反射強度分布を示すヒストグラムである。図3に示すヒストグラムでは、ヌル点が発見されない可能性が高くなる。
【0029】
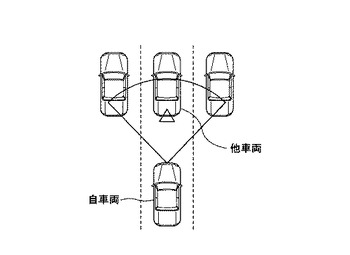
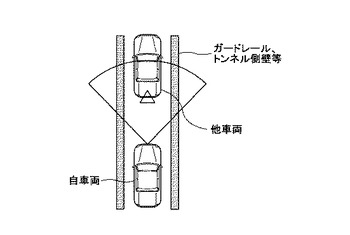
このような反射強度分布の変動は、自車両の置かれた走行環境に依存して発生する。図4、5は、他車両による反射波の反射強度分布が変動する走行環境を例示した図である。図4に示すように、対象となる他車両に隣接して更に他の車両が走行している場合や、図5に示すように、他車両の側方にガードレールやトンネルの側壁等が存在する場合に、マルチパス等の影響によって、反射強度分布は図2(A)に示す分布に近いものとなり得る。
【0030】
従って、本実施例の車両用制御装置1では、路上鉄板フラグのみで障害物の種類を判別するのではなく、後述する判定処理の一要素として利用する。
【0031】
レーダーECU20は、障害物の位置、相対速度、及び路上鉄板フラグをシステムECU50に出力する。
【0032】
ヨーレートセンサ30は、車両の水平方向における回転角速度を検出する。また、車速センサ32は、例えば、各車輪に取り付けられた車輪速センサと、これらのセンサ出力値から異常値を除外した上で平均を求める等して車速を算出するスキッドコントロールコンピュータと、を含む。これらのセンサ出力値は、多重通信線や他の車載ECU等を介してシステムECU50に出力される。
【0033】
ナビゲーション装置40は、GPS受信機、地図データを格納したHDD等の記憶装置、GPS受信機の出力を解析して自車両の位置(緯度、経度、及び高度)を特定するナビゲーションコンピュータを備える。本実施例の場合、ナビゲーション装置40は、自車両がカーブ路の入口付近を走行しているか否かを示す信号をシステムECU50に出力する。「カーブ路の入口付近」とは、例えばカーブ区間の入口を示すノード点の手前側A[m]〜奥側B[m]等と予め定義しておく。
【0034】
なお、カーブ路の入口付近を走行しているか否かを判定する手段は、上記ナビゲーション装置40によるものに限らず、レーダー装置10やヨーレートセンサ30の出力を解析して判定を行ってもよい。
【0035】
システムECU50は、レーダーECU20と同様のハードウエア構成を有し、CPUがプログラムを実行することにより機能する機能ブロックとして、衝突判定部52と、作動キャンセル演算部54と、デバイス作動制御部56と、を備える。
【0036】
衝突判定部52は、レーダーECU20が出力した障害物(反射点)の情報から把握される、横位置(自車両中心軸の延長線からの障害物の乖離)、衝突横位置(自車両の前端の線と障害物の軌道との交点)、TTC(Time To Collision)等の指標値が衝突判定条件を満たすか否かを判定することにより、障害物との衝突可能性があるか否かを判定する。
【0037】
作動キャンセル演算部54は、レーダーECU20から入力される障害物の位置、相対速度、及び路上鉄板フラグを用いて、衝突判定部52の判定結果による作動デバイス60の作動をキャンセルする。詳しくは、後述する。
【0038】
デバイス作動制御部56は、衝突判定部52により衝突可能性があると判定され、作動キャンセル演算部54によりキャンセルがなされなかった場合に、作動デバイス60を作動させる。
【0039】
作動デバイス60としては、種々のものが採用され得る。例えば、運転者に警報音を発するスピーカであってもよいし、ブレーキペダルの踏み込み量に依らずに制動力を出力する電子制御式ブレーキ装置、或いはステアリング操作に依らずに操舵力を出力する自動操舵装置等であってもよい。また、衝突時に乗員や車外歩行者等を保護するためのエアバッグ装置、シートベルトプリテンショナー、ボンネット駆動装置等であってもよい。
【0040】
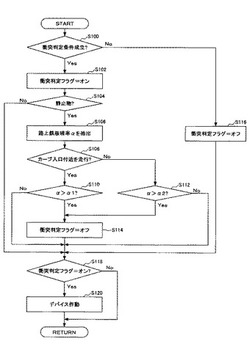
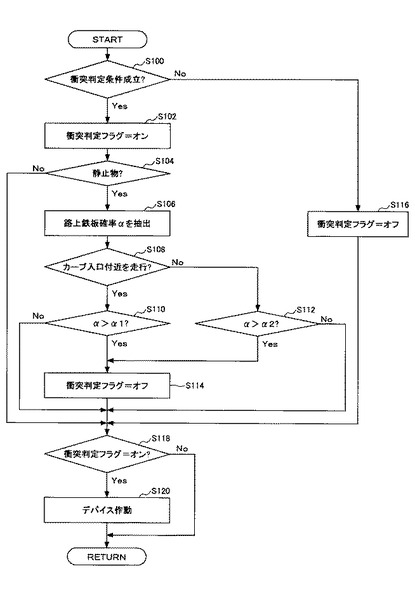
以下、システムECU50により実行される処理の流れについて説明する。図6は、本実施例のシステムECU50により実行される処理の流れを示すフローチャートである。本フローは、障害物毎(反射点毎;以下同じ)に実行される。
【0041】
まず、衝突判定部52が、ある障害物について、衝突判定条件が成立したか否かを判定する(S100)。衝突判定部52は、衝突判定条件が成立した場合には、衝突判定フラグをオンに設定する(S102)。
【0042】
次に、作動キャンセル演算部54が、対象となる障害物が静止物であるか否かを判定する(S104)。本ステップの判定は、例えば、レーダーECU20が出力する障害物の絶対位置変化が所定値未満であるか否かを判定することにより行われる。なお、一度静止物でないと判定された障害物については、その後静止した場合でも静止物でないと判定するようにしてもよい(例;走行中の車両が静止した場合)。
【0043】
対象となる障害物が静止物である場合、作動キャンセル演算部54は、予め算出していた当該障害物についての路上鉄板確率αを抽出する(S106)。
【0044】
路上鉄板確率αは、本フローの流れとは別に、障害物毎に予め繰り返し算出されている値である。路上鉄板確率αは、以下のように、路上鉄板フラグがオンの場合と、オフの場合で場合分けして算出される。
【0045】
(1)路上鉄板フラグがオンであり、過去の所定期間(例えば0コンマ数[sec]程度)における障害物の横位置偏差が所定値(例えば0コンマ数[m]程度)未満である場合、路上鉄板確率αを所定値分(例えば数%程度)増加させる。
【0046】
(2)路上鉄板フラグがオンであり、過去の所定期間における障害物の横位置偏差が所定値未満である場合、路上鉄板確率αは変化させない。
【0047】
(3)路上鉄板フラグがオフの場合、路上鉄板確率αを所定値分(例えば数%程度)減少させる。
【0048】
このように、路上鉄板確率αは、障害物の自車両進行方向に直交する方向に関する変化量が所定量未満である状態が継続すると、増加する傾向を示す指標値である。路上鉄板確率αが閾値を超える場合、当該障害物が、前述した路上金属物である確率が高いものとなる。
【0049】
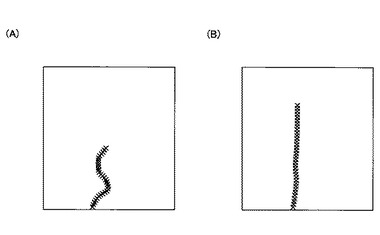
図7は、自車両の前方を走行する先行車両による反射点の位置変化と、路上金属物による反射点の位置変化を示す図である。図7(A)に示すように、自車両の前方を走行する先行車両による反射点は、自車両の幅方向にふらつく傾向を示すのに対し路上金属物による反射点は、電磁波が一点反射で帰ってくる可能性が高いため、自車両の幅方向に関する変動が小さくなる。従って、路上鉄板確率αは、障害物が路上金属物である可能性を示す有力な指標値である。
【0050】
また、図8は、実際に他車両と路上金属物に対してレーダー装置を作動させ、路上鉄板確率αを算出した結果を示す図である。図中、横軸は、他車両又は路上金属物との距離である。図示するように、路上金属物については、路上鉄板確率αが閾値(本図では80%)よりも高くなり、他車両については、路上鉄板確率αが閾値よりも低くなることが確かめられた。
【0051】
図6のフローチャートに戻り、処理について説明する。S106において路上鉄板確率αを抽出すると、作動キャンセル演算部54は、ナビゲーション装置40から入力される信号に基づき、自車両がカーブ入口付近を走行しているか否かを判定するS(S108)。
【0052】
自車両がカーブ入口付近を走行している場合、路上鉄板確率αが閾値α1を超えるか否かを判定し(S110)、路上鉄板確率αが閾値α1を超える場合には、衝突判定フラグをオフに変更する(S114)。
【0053】
一方、自車両がカーブ路の入口付近を走行していない場合、路上鉄板確率αが閾値α2を超えるか否かを判定し(S112)、路上鉄板確率αが閾値α2を超える場合には、衝突判定フラグをオフに変更する(S114)。
【0054】
S110〜S114の処理によって、本来、衝突安全制御が不要な路上金属物に対して作動デバイス60が作動するのを抑制することができる。
【0055】
ここで、閾値α1>閾値α2の関係が成立する(例えば、α1=90%、α2=60%等)。すなわち、作動キャンセル演算部54は、自車両がカーブ路の入口付近を走行している場合には、路上鉄板確率αがある程度高くても(閾値α1と閾値α2の間)、衝突判定フラグをオフにしないように制御する。
【0056】
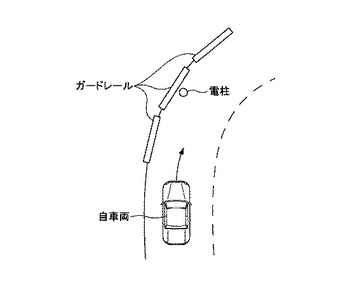
この結果、衝突安全制御の必要性が高いカーブ路の入口付近では、路側に存在する電柱やポール、ガードレール等について作動デバイス60を、より積極的に作動させることができる。図9は、カーブ路の入口付近において路側に電柱が存在する走行場面を示す図である。電柱やポール、ガードレール等は、路上金属物に類似した反射特性を示すため、路上鉄板フラグが設定される可能性が高く、従って、路上鉄板確率αが高く算出される可能性が高い。しかしながら、これらの物体は車両が乗り越えることが可能なものではなく、衝突安全制御の対象とすべき物体である。そこで、本実施例の車両用制御装置1では、カーブ路の入口付近では作動キャンセル演算部54が判定に用いる閾値を高くし、路上鉄板確率αがある程度高くても、衝突判定フラグをオフにしないように制御している。これによって、本実施例の車両用制御装置1は、図9に示すような場面において、作動デバイス60が作動する可能性を高めることができる。
【0057】
閾値α1、α2は、作動デバイス60の種類(警報音出力か、自動制動か等)によって、個別に設定されてもよい。
【0058】
なお、S100において衝突判定条件が成立しなかった場合は、衝突判定フラグがオフに設定される。
【0059】
S100〜S116の処理を終了すると、衝突判定フラグがオンに設定されているか否かを判定する(S118)。
【0060】
衝突判定フラグがオンに設定されている場合、デバイス作動制御部56が作動デバイス60を作動させる(S120)。
【0061】
以上説明した本実施例の車両用制御装置1によれば、レーダー装置10によって検知された物体(障害物)の性質と自車両の走行環境に応じた適切な衝突安全制御を行うことができる。
【0062】
以上、本発明を実施するための最良の形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々の変形及び置換を加えることができる。
【0063】
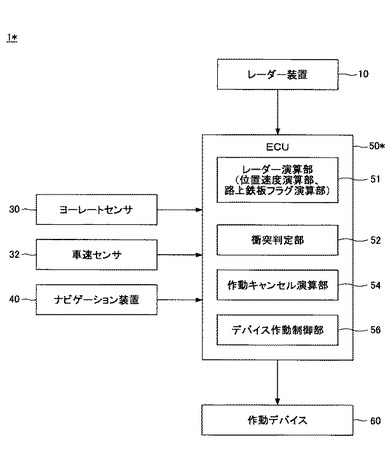
例えば、図10に示すように、レーダーECU20の機能は、統合されたECU50*mの一機能(位置速度演算部と路上鉄板フラグ演算部を備えるレーダー演算部51)であってもよい。図10は、本発明の変形例に係る車両用制御装置1*のシステム構成例である。このように、ハードウエア上における機能部の配置については、種々の変更が可能である。
【符号の説明】
【0064】
1 車両用制御装置
10 レーダー装置
20 レーダーECU
22 位置・速度演算部
24 路上鉄板フラグ演算部
30 ヨーレートセンサ
32 車速センサ
40 ナビゲーション装置
50 システムECU
52 衝突判定部
54 作動キャンセル演算部
56 デバイス作動制御部
60 作動デバイス
【技術分野】
【0001】
本発明は、車載レーダー装置の出力に基づいて衝突回避制御やプリクラッシュ制御(衝突予防安全制御)を行う車両用制御装置、並びに当該車両用制御装置に用いられる特定物体判別装置、特定物体判別方法、特定物体判別プログラムに関する。
【背景技術】
【0002】
従来、車両に搭載されたレーダー装置の出力に基づき車両と障害物の位置関係を認識し、衝突可能性がある場合に自動的にブレーキ出力を行ったり、予めエアバッグを展開したりする(以下、衝突安全制御と総称する)技術が実用化されている。このような技術においては、橋の継ぎ目、工事用の鉄板、溝の蓋(グレーチング)等の高さの低い(車両が乗り越えられる)路上金属物を正確に認識し、ブレーキ出力等を行わないようにすることが必要とされる。
【0003】
特許文献1には、電磁波の反射点の位置に基づき物体の幅を算出し、更に複数の反射点の位置に基づき物体の代表点の位置を設定し、反射点又は代表点の位置の変化量に基づき物体の自車幅方向の相対速度となる横相対速度を算出する車両用物体検知装置について記載されている。この車両用物体検知装置では、所定周期毎に検知された物体の検知履歴に基づき、物体が静止物であると判定され、かつ、物体の幅の増大量が所定値よりも大きい場合に、横相対速度算出手段により算出される横相対速度を補正している。
【0004】
また、特許文献2には、ステアリングホイールの操作が検出されなかったときに障害物を回避するための接触回避支援制御を行う車両用接触回避支援装置であって、車両が走行中の道路が、車幅方向に所定角度以上の傾斜角を持つバンクを有するカーブ路であるか否かを判断し、バンクを有するカーブ路を走行していると判断した場合に、接触余裕値としての接触予定時間の閾値をより小さい値に設定するか、接触回避支援を行わないようにする車両用接触回避支援装置について記載されている。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2010−261897号公報
【特許文献2】特開2011−051572号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、上記特許文献1に記載の装置では、静止物を認識した結果として横相対速度の補正を行うのみであり、衝突安全制御に実施が必要な場面であるか、そうでないかを適切に判断できない場合がある。
【0007】
また、特許文献2に記載の装置は、あくまでステアリングホイールの操作が検出されなかったときに衝突安全制御を行う装置であるため、衝突安全制御を抑制する条件が、バンクを有するカーブ路、すなわち操舵操作をしなくても車両が旋回可能な場面に限定されている。このため、他の様々な走行環境に適用することができない。
【0008】
本発明は、一側面によれば、レーダーによって検知された物体の性質と車両の走行環境に応じた適切な衝突安全制御を行うことが可能な車両用制御装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
上記目的を達成するための本発明の一態様は、
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段と、
前記位置情報出力手段により出力された反射点の位置情報に基づき、該反射点を含む物体との衝突を回避又は緩和するための安全制御を行う衝突安全制御手段と、
前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加する傾向の指標値を算出し、該指標値が閾値を超える場合に当該反射点についての衝突安全制御を行わないように前記衝突安全制御手段に指示する衝突安全制御キャンセル手段と、
前記車両がカーブ路の入口付近を走行しているか否かを判定するカーブ路走行判定手段と、を備え、
前記衝突安全制御キャンセル手段は、前記カーブ路走行判定手段により前記車両がカーブ路の入口付近を走行していると判定された場合に、前記車両がカーブ路の入口付近を走行していないと判定された場合に比して、前記閾値を大きくすることを特徴とする、
車両用制御装置である。
【0010】
この本発明の一態様によれば、車両の進行方向に直交する方向に関する反射点の変化量が所定量未満である状態が継続すると増加する傾向の指標値を算出し、指標値が閾値を超える場合に当該反射点についての衝突安全制御を行わないように前記衝突安全制御手段に指示する衝突安全制御キャンセル手段が、車両がカーブ路の入口付近を走行していると判定された場合に、車両がカーブ路の入口付近を走行していないと判定された場合に比して、閾値を大きくするため、レーダーによって検知された物体の性質と車両の走行環境に応じた適切な衝突安全制御を行うことが可能な車両用制御装置を提供することができる。
【0011】
本発明の第2の態様は、
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段と、
前記反射点の反射強度分布に統計上の特異点が存在せず且つ前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加し、前記反射点の反射強度分布に前記統計上の特異点が存在する場合に減少するように、前記反射点が特定の物体に含まれる可能性を示す指標値を算出する指標値算出手段と、
前記指標値算出手段により算出された指標値が閾値を超える場合に、前記反射点が特定の物体であると判定する判定手段と、
を備える特定物体判別装置である。
【0012】
本発明の第2の態様によれば、反射点の反射強度分布に統計上の特異点が存在せず且つ車両の進行方向に直交する方向に関する反射点の変化量が所定量未満である状態が継続すると増加し、反射点の反射強度分布に統計上の特異点が存在する場合に減少するように、反射点が特定の物体に含まれる可能性を示す指標値を算出し、算出された指標値が閾値を超える場合に、反射点が特定の物体であると判定するため、レーダーによって検知された物体の性質を正確に判別することができる。
【0013】
本発明の第3の態様は、
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段の出力をコンピュータが解析して、前記反射点が特定の物体に含まれるか否かを判別する特定物体判別方法であって、
前記反射点の反射強度分布に統計上の特異点が存在するか否かを判定する処理と、
前記反射点の反射強度分布に統計上の特異点が存在せず且つ前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加し、前記反射点の反射強度分布に統計上の特異点が存在する場合に減少するように、前記反射点が特定の物体に含まれる可能性を示す指標値を算出する処理と、
前記指標値算出手段により算出された指標値が閾値を超える場合に、前記反射点が特定の物体に含まれると判定する処理と、
をコンピュータが実行する特定物体判別方法である。
【0014】
本発明の第4の態様は、
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段の出力をコンピュータに解析させ、前記反射点が特定の物体に含まれるか否かを判別させる特定物体判別プログラムであって、
前記反射点の反射強度分布に統計上の特異点が存在するか否かを判定する処理と、
前記反射点の反射強度分布に統計上の特異点が存在せず且つ前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加し、前記反射点の反射強度分布に統計上の特異点が存在する場合に減少するように、前記反射点が特定の物体に含まれる可能性を示す指標値を算出する処理と、
前記指標値算出手段により算出された指標値が閾値を超える場合に、前記反射点が特定の物体に含まれると判定する処理と、
をコンピュータに実行させる特定物体判別プログラムである。
【発明の効果】
【0015】
本発明は、一側面によれば、レーダーによって検知された物体の性質に応じた適切な衝突安全制御を行うことが可能な車両用制御装置を提供することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施例に係る車両用制御装置1のシステム構成例である。
【図2】理想環境下において、路上金属物と他車両における同一の反射点による反射波の反射強度分布の相違を示すヒストグラムである。
【図3】実環境下において、他車両による反射波の反射強度分布を示すヒストグラムである。
【図4】他車両による反射波の反射強度分布が変動する走行環境を例示した図である。
【図5】他車両による反射波の反射強度分布が変動する走行環境を例示した図である。
【図6】本実施例のシステムECU50により実行される処理の流れを示すフローチャートである。
【図7】自車両の前方を走行する先行車両による反射点の位置変化と、路上金属物による反射点の位置変化を示す図である。
【図8】実際に他車両と路上金属物に対してレーダー装置を作動させ、路上鉄板確率αを算出した結果を示す図である。
【図9】カーブ路の入口付近において路側に電柱が存在する走行場面を示す図である。
【図10】本発明の変形例に係る車両用制御装置1*のシステム構成例である。
【発明を実施するための形態】
【0017】
以下、本発明を実施するための形態について、添付図面を参照しながら実施例を挙げて説明する。
【実施例】
【0018】
以下、図面を参照し、本発明の一実施例に係る車両用制御装置について説明する。
【0019】
図1は、本発明の一実施例に係る車両用制御装置1のシステム構成例である。車両用制御装置1は、主要な構成として、レーダー装置10と、レーダーECU(Electronic Control Unit)20と、ヨーレートセンサ30、車速センサ32と、ナビゲーション装置40と、システムECU50と、作動デバイス60と、を備える。
【0020】
レーダー装置10は、例えばミリ波レーダーであり、車両用制御装置1が搭載される自車両のフロント部に取り付けられ、自車両の前方に存在する障害物を検出する。レーダー装置10は、電磁波を車両前方に放射する送信アンテナ、送信アンテナに供給する送信信号を生成する信号生成部、電磁波が障害物により反射されて帰還する反射波を受信する受信アンテナ等を備える。送信アンテナは、受信アンテナと一体型のものが用いられてもよい。本発明の適用上、レーダー装置10の方式は如何なるものでもよいが、例えばFM−CW方式等が採用される。
【0021】
FM−CW方式とは、周波数が漸次増減する送信信号と受信信号をミキシングすることによりビート信号を発生させ、ビート信号の周波数(ビート周波数)を、送信信号の周波数が増加する上昇部と周波数が減少する下降部の区間毎に特定し、上昇部のビート周波数と下降部のビート周波数に基づいてDBM(Digital Beam Forming)等を適用することにより、測定対象物(障害物)との距離、方位、相対速度を測定する方式である。
【0022】
レーダーECU20は、例えば、CPU(Central Processing Unit)を中心としてROM(Read Only Memory)、RAM(Random Access Memory)等のメモリ装置32がバスを介して相互に接続されたマイクロコンピュータであり、その他、HDD(Hard Disc Drive)やDVD−R(Digital Versatile Disk‐Recordable)ドライブ、CD−R(Compact Disc‐Recordable)ドライブ、EEPROM(Electronically Erasable and Programmable Read Only Memory)等の補助記憶装置やI/Oポート、タイマー、カウンター等を備える。補助記憶装置には、CPUが実行するプログラムやデータが格納されている。
【0023】
レーダーECU20は、CPUがプログラムを実行することにより機能する機能ブロックとして、上記FM−CW方式における各種演算を行い、障害物において電磁波を反射した反射点毎の位置(距離及び方位)、自車両との相対速度を算出する位置・速度演算部22と、反射点毎に、反射波の反射強度分布に基づいて路上鉄板フラグのオン/オフを切り替える路上鉄板フラグ演算部24と、を備える。
【0024】
ここで、路上鉄板フラグとは、本来衝突安全制御の対象としないことが望ましい、橋の継ぎ目、工事用の鉄板、溝の蓋(グレーチング)等の高さの低い(車両が乗り越えられる)路上金属物である可能性が高いことを示すフラグであり、RAM等の所定領域にオン又はオフを示す値を書き込むことにより設定される。
【0025】
図2は、理想環境下において、路上金属物と他車両における同一の反射点による反射波の反射強度分布の相違を示すヒストグラムである。図中、横軸は自車両と反射点との距離を示す。反射強度は、レーダー装置10の受信アンテナの受信電力によって表される。
【0026】
ここで、「同一の反射点」とは、レーダー装置10が繰り返し反射波の受信を行う中で、前回との位置変動が所定値以内に収まる一連の反射点をいう。以下、これを前提として説明する。
【0027】
図2(A)は路上金属物による反射波の反射強度分布を示し、図2(B)は他車両による反射波の反射強度分布を示す。このように、同一の反射点における受信電力と距離の関係を示す反射強度分布を解析することにより、障害物が路上金属物であるか、他車両その他の安全制御の対象となる物体であるかを、ある程度判別することができる。路上鉄板フラグ演算部24は、例えば、反射波の反射強度分布を示すヒストグラムにおいて、図2(B)に示すヌル点(統計上の特異点)が検出された場合に路上鉄板フラグをオフに設定し、検出されなかった場合に路上鉄板フラグをオンに設定する。より具体的には、反射波の反射強度分布を示すヒストグラムにおいて、ある微小距離区間における反射強度の分散或いは最大値と最小値の差が所定値以上であればヌル点が検出されたと判定し、ヒストグラムの全区間に亘り微小距離区間における反射強度の分散或いは最大値と最小値の差が所定値未満であればヌル点が検出されなかったと判定する(その他種々の手法が考えられ、これに限定されない)。
【0028】
しかしながら、現実的には、他車両による反射波の反射強度分布は、図2(B)に示すものとはならず、図3に示すような容易に図2(A)の反射強度分布と判別できないものとなる場合がある。図3は、実環境下において、他車両による反射波の反射強度分布を示すヒストグラムである。図3に示すヒストグラムでは、ヌル点が発見されない可能性が高くなる。
【0029】
このような反射強度分布の変動は、自車両の置かれた走行環境に依存して発生する。図4、5は、他車両による反射波の反射強度分布が変動する走行環境を例示した図である。図4に示すように、対象となる他車両に隣接して更に他の車両が走行している場合や、図5に示すように、他車両の側方にガードレールやトンネルの側壁等が存在する場合に、マルチパス等の影響によって、反射強度分布は図2(A)に示す分布に近いものとなり得る。
【0030】
従って、本実施例の車両用制御装置1では、路上鉄板フラグのみで障害物の種類を判別するのではなく、後述する判定処理の一要素として利用する。
【0031】
レーダーECU20は、障害物の位置、相対速度、及び路上鉄板フラグをシステムECU50に出力する。
【0032】
ヨーレートセンサ30は、車両の水平方向における回転角速度を検出する。また、車速センサ32は、例えば、各車輪に取り付けられた車輪速センサと、これらのセンサ出力値から異常値を除外した上で平均を求める等して車速を算出するスキッドコントロールコンピュータと、を含む。これらのセンサ出力値は、多重通信線や他の車載ECU等を介してシステムECU50に出力される。
【0033】
ナビゲーション装置40は、GPS受信機、地図データを格納したHDD等の記憶装置、GPS受信機の出力を解析して自車両の位置(緯度、経度、及び高度)を特定するナビゲーションコンピュータを備える。本実施例の場合、ナビゲーション装置40は、自車両がカーブ路の入口付近を走行しているか否かを示す信号をシステムECU50に出力する。「カーブ路の入口付近」とは、例えばカーブ区間の入口を示すノード点の手前側A[m]〜奥側B[m]等と予め定義しておく。
【0034】
なお、カーブ路の入口付近を走行しているか否かを判定する手段は、上記ナビゲーション装置40によるものに限らず、レーダー装置10やヨーレートセンサ30の出力を解析して判定を行ってもよい。
【0035】
システムECU50は、レーダーECU20と同様のハードウエア構成を有し、CPUがプログラムを実行することにより機能する機能ブロックとして、衝突判定部52と、作動キャンセル演算部54と、デバイス作動制御部56と、を備える。
【0036】
衝突判定部52は、レーダーECU20が出力した障害物(反射点)の情報から把握される、横位置(自車両中心軸の延長線からの障害物の乖離)、衝突横位置(自車両の前端の線と障害物の軌道との交点)、TTC(Time To Collision)等の指標値が衝突判定条件を満たすか否かを判定することにより、障害物との衝突可能性があるか否かを判定する。
【0037】
作動キャンセル演算部54は、レーダーECU20から入力される障害物の位置、相対速度、及び路上鉄板フラグを用いて、衝突判定部52の判定結果による作動デバイス60の作動をキャンセルする。詳しくは、後述する。
【0038】
デバイス作動制御部56は、衝突判定部52により衝突可能性があると判定され、作動キャンセル演算部54によりキャンセルがなされなかった場合に、作動デバイス60を作動させる。
【0039】
作動デバイス60としては、種々のものが採用され得る。例えば、運転者に警報音を発するスピーカであってもよいし、ブレーキペダルの踏み込み量に依らずに制動力を出力する電子制御式ブレーキ装置、或いはステアリング操作に依らずに操舵力を出力する自動操舵装置等であってもよい。また、衝突時に乗員や車外歩行者等を保護するためのエアバッグ装置、シートベルトプリテンショナー、ボンネット駆動装置等であってもよい。
【0040】
以下、システムECU50により実行される処理の流れについて説明する。図6は、本実施例のシステムECU50により実行される処理の流れを示すフローチャートである。本フローは、障害物毎(反射点毎;以下同じ)に実行される。
【0041】
まず、衝突判定部52が、ある障害物について、衝突判定条件が成立したか否かを判定する(S100)。衝突判定部52は、衝突判定条件が成立した場合には、衝突判定フラグをオンに設定する(S102)。
【0042】
次に、作動キャンセル演算部54が、対象となる障害物が静止物であるか否かを判定する(S104)。本ステップの判定は、例えば、レーダーECU20が出力する障害物の絶対位置変化が所定値未満であるか否かを判定することにより行われる。なお、一度静止物でないと判定された障害物については、その後静止した場合でも静止物でないと判定するようにしてもよい(例;走行中の車両が静止した場合)。
【0043】
対象となる障害物が静止物である場合、作動キャンセル演算部54は、予め算出していた当該障害物についての路上鉄板確率αを抽出する(S106)。
【0044】
路上鉄板確率αは、本フローの流れとは別に、障害物毎に予め繰り返し算出されている値である。路上鉄板確率αは、以下のように、路上鉄板フラグがオンの場合と、オフの場合で場合分けして算出される。
【0045】
(1)路上鉄板フラグがオンであり、過去の所定期間(例えば0コンマ数[sec]程度)における障害物の横位置偏差が所定値(例えば0コンマ数[m]程度)未満である場合、路上鉄板確率αを所定値分(例えば数%程度)増加させる。
【0046】
(2)路上鉄板フラグがオンであり、過去の所定期間における障害物の横位置偏差が所定値未満である場合、路上鉄板確率αは変化させない。
【0047】
(3)路上鉄板フラグがオフの場合、路上鉄板確率αを所定値分(例えば数%程度)減少させる。
【0048】
このように、路上鉄板確率αは、障害物の自車両進行方向に直交する方向に関する変化量が所定量未満である状態が継続すると、増加する傾向を示す指標値である。路上鉄板確率αが閾値を超える場合、当該障害物が、前述した路上金属物である確率が高いものとなる。
【0049】
図7は、自車両の前方を走行する先行車両による反射点の位置変化と、路上金属物による反射点の位置変化を示す図である。図7(A)に示すように、自車両の前方を走行する先行車両による反射点は、自車両の幅方向にふらつく傾向を示すのに対し路上金属物による反射点は、電磁波が一点反射で帰ってくる可能性が高いため、自車両の幅方向に関する変動が小さくなる。従って、路上鉄板確率αは、障害物が路上金属物である可能性を示す有力な指標値である。
【0050】
また、図8は、実際に他車両と路上金属物に対してレーダー装置を作動させ、路上鉄板確率αを算出した結果を示す図である。図中、横軸は、他車両又は路上金属物との距離である。図示するように、路上金属物については、路上鉄板確率αが閾値(本図では80%)よりも高くなり、他車両については、路上鉄板確率αが閾値よりも低くなることが確かめられた。
【0051】
図6のフローチャートに戻り、処理について説明する。S106において路上鉄板確率αを抽出すると、作動キャンセル演算部54は、ナビゲーション装置40から入力される信号に基づき、自車両がカーブ入口付近を走行しているか否かを判定するS(S108)。
【0052】
自車両がカーブ入口付近を走行している場合、路上鉄板確率αが閾値α1を超えるか否かを判定し(S110)、路上鉄板確率αが閾値α1を超える場合には、衝突判定フラグをオフに変更する(S114)。
【0053】
一方、自車両がカーブ路の入口付近を走行していない場合、路上鉄板確率αが閾値α2を超えるか否かを判定し(S112)、路上鉄板確率αが閾値α2を超える場合には、衝突判定フラグをオフに変更する(S114)。
【0054】
S110〜S114の処理によって、本来、衝突安全制御が不要な路上金属物に対して作動デバイス60が作動するのを抑制することができる。
【0055】
ここで、閾値α1>閾値α2の関係が成立する(例えば、α1=90%、α2=60%等)。すなわち、作動キャンセル演算部54は、自車両がカーブ路の入口付近を走行している場合には、路上鉄板確率αがある程度高くても(閾値α1と閾値α2の間)、衝突判定フラグをオフにしないように制御する。
【0056】
この結果、衝突安全制御の必要性が高いカーブ路の入口付近では、路側に存在する電柱やポール、ガードレール等について作動デバイス60を、より積極的に作動させることができる。図9は、カーブ路の入口付近において路側に電柱が存在する走行場面を示す図である。電柱やポール、ガードレール等は、路上金属物に類似した反射特性を示すため、路上鉄板フラグが設定される可能性が高く、従って、路上鉄板確率αが高く算出される可能性が高い。しかしながら、これらの物体は車両が乗り越えることが可能なものではなく、衝突安全制御の対象とすべき物体である。そこで、本実施例の車両用制御装置1では、カーブ路の入口付近では作動キャンセル演算部54が判定に用いる閾値を高くし、路上鉄板確率αがある程度高くても、衝突判定フラグをオフにしないように制御している。これによって、本実施例の車両用制御装置1は、図9に示すような場面において、作動デバイス60が作動する可能性を高めることができる。
【0057】
閾値α1、α2は、作動デバイス60の種類(警報音出力か、自動制動か等)によって、個別に設定されてもよい。
【0058】
なお、S100において衝突判定条件が成立しなかった場合は、衝突判定フラグがオフに設定される。
【0059】
S100〜S116の処理を終了すると、衝突判定フラグがオンに設定されているか否かを判定する(S118)。
【0060】
衝突判定フラグがオンに設定されている場合、デバイス作動制御部56が作動デバイス60を作動させる(S120)。
【0061】
以上説明した本実施例の車両用制御装置1によれば、レーダー装置10によって検知された物体(障害物)の性質と自車両の走行環境に応じた適切な衝突安全制御を行うことができる。
【0062】
以上、本発明を実施するための最良の形態について実施例を用いて説明したが、本発明はこうした実施例に何等限定されるものではなく、本発明の要旨を逸脱しない範囲内において種々の変形及び置換を加えることができる。
【0063】
例えば、図10に示すように、レーダーECU20の機能は、統合されたECU50*mの一機能(位置速度演算部と路上鉄板フラグ演算部を備えるレーダー演算部51)であってもよい。図10は、本発明の変形例に係る車両用制御装置1*のシステム構成例である。このように、ハードウエア上における機能部の配置については、種々の変更が可能である。
【符号の説明】
【0064】
1 車両用制御装置
10 レーダー装置
20 レーダーECU
22 位置・速度演算部
24 路上鉄板フラグ演算部
30 ヨーレートセンサ
32 車速センサ
40 ナビゲーション装置
50 システムECU
52 衝突判定部
54 作動キャンセル演算部
56 デバイス作動制御部
60 作動デバイス
【特許請求の範囲】
【請求項1】
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段と、
前記位置情報出力手段により出力された反射点の位置情報に基づき、該反射点を含む物体との衝突を回避又は緩和するための安全制御を行う衝突安全制御手段と、
前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加する傾向の指標値を算出し、該指標値が閾値を超える場合に当該反射点についての衝突安全制御を行わないように前記衝突安全制御手段に指示する衝突安全制御キャンセル手段と、
前記車両がカーブ路の入口付近を走行しているか否かを判定するカーブ路走行判定手段と、を備え、
前記衝突安全制御キャンセル手段は、前記カーブ路走行判定手段により前記車両がカーブ路の入口付近を走行していると判定された場合に、前記車両がカーブ路の入口付近を走行していないと判定された場合に比して、前記閾値を大きくすることを特徴とする、
車両用制御装置。
【請求項2】
請求項1に記載の車両用制御装置であって、
前記衝突安全制御キャンセル手段は、前記反射点の反射強度分布に統計上の特異点が存在せず且つ前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加し、前記反射点の反射強度分布に前記統計上の特異点が存在する場合に減少するように、前記指標値を算出することを特徴とする、
車両用制御装置。
【請求項3】
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段と、
前記反射点の反射強度分布に統計上の特異点が存在せず且つ前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加し、前記反射点の反射強度分布に前記統計上の特異点が存在する場合に減少するように、前記反射点が特定の物体に含まれる可能性を示す指標値を算出する指標値算出手段と、
前記指標値算出手段により算出された指標値が閾値を超える場合に、前記反射点が特定の物体であると判定する判定手段と、
を備える特定物体判別装置。
【請求項4】
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段の出力をコンピュータが解析して、前記反射点が特定の物体に含まれるか否かを判別する特定物体判別方法であって、
前記反射点の反射強度分布に統計上の特異点が存在するか否かを判定する処理と、
前記反射点の反射強度分布に統計上の特異点が存在せず且つ前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加し、前記反射点の反射強度分布に統計上の特異点が存在する場合に減少するように、前記反射点が特定の物体に含まれる可能性を示す指標値を算出する処理と、
前記指標値算出手段により算出された指標値が閾値を超える場合に、前記反射点が特定の物体に含まれると判定する処理と、
をコンピュータが実行する特定物体判別方法。
【請求項5】
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段の出力をコンピュータに解析させ、前記反射点が特定の物体に含まれるか否かを判別させる特定物体判別プログラムであって、
前記反射点の反射強度分布に統計上の特異点が存在するか否かを判定する処理と、
前記反射点の反射強度分布に統計上の特異点が存在せず且つ前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加し、前記反射点の反射強度分布に統計上の特異点が存在する場合に減少するように、前記反射点が特定の物体に含まれる可能性を示す指標値を算出する処理と、
前記指標値算出手段により算出された指標値が閾値を超える場合に、前記反射点が特定の物体に含まれると判定する処理と、
をコンピュータに実行させる特定物体判別プログラム。
【請求項1】
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段と、
前記位置情報出力手段により出力された反射点の位置情報に基づき、該反射点を含む物体との衝突を回避又は緩和するための安全制御を行う衝突安全制御手段と、
前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加する傾向の指標値を算出し、該指標値が閾値を超える場合に当該反射点についての衝突安全制御を行わないように前記衝突安全制御手段に指示する衝突安全制御キャンセル手段と、
前記車両がカーブ路の入口付近を走行しているか否かを判定するカーブ路走行判定手段と、を備え、
前記衝突安全制御キャンセル手段は、前記カーブ路走行判定手段により前記車両がカーブ路の入口付近を走行していると判定された場合に、前記車両がカーブ路の入口付近を走行していないと判定された場合に比して、前記閾値を大きくすることを特徴とする、
車両用制御装置。
【請求項2】
請求項1に記載の車両用制御装置であって、
前記衝突安全制御キャンセル手段は、前記反射点の反射強度分布に統計上の特異点が存在せず且つ前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加し、前記反射点の反射強度分布に前記統計上の特異点が存在する場合に減少するように、前記指標値を算出することを特徴とする、
車両用制御装置。
【請求項3】
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段と、
前記反射点の反射強度分布に統計上の特異点が存在せず且つ前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加し、前記反射点の反射強度分布に前記統計上の特異点が存在する場合に減少するように、前記反射点が特定の物体に含まれる可能性を示す指標値を算出する指標値算出手段と、
前記指標値算出手段により算出された指標値が閾値を超える場合に、前記反射点が特定の物体であると判定する判定手段と、
を備える特定物体判別装置。
【請求項4】
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段の出力をコンピュータが解析して、前記反射点が特定の物体に含まれるか否かを判別する特定物体判別方法であって、
前記反射点の反射強度分布に統計上の特異点が存在するか否かを判定する処理と、
前記反射点の反射強度分布に統計上の特異点が存在せず且つ前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加し、前記反射点の反射強度分布に統計上の特異点が存在する場合に減少するように、前記反射点が特定の物体に含まれる可能性を示す指標値を算出する処理と、
前記指標値算出手段により算出された指標値が閾値を超える場合に、前記反射点が特定の物体に含まれると判定する処理と、
をコンピュータが実行する特定物体判別方法。
【請求項5】
車両前方に電磁波を放射して反射波を受信することにより得られる反射点の位置情報を出力する位置情報出力手段の出力をコンピュータに解析させ、前記反射点が特定の物体に含まれるか否かを判別させる特定物体判別プログラムであって、
前記反射点の反射強度分布に統計上の特異点が存在するか否かを判定する処理と、
前記反射点の反射強度分布に統計上の特異点が存在せず且つ前記車両の進行方向に直交する方向に関する前記反射点の変化量が所定量未満である状態が継続すると増加し、前記反射点の反射強度分布に統計上の特異点が存在する場合に減少するように、前記反射点が特定の物体に含まれる可能性を示す指標値を算出する処理と、
前記指標値算出手段により算出された指標値が閾値を超える場合に、前記反射点が特定の物体に含まれると判定する処理と、
をコンピュータに実行させる特定物体判別プログラム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2013−114421(P2013−114421A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−259524(P2011−259524)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]