
車両用制御装置
【課題】 本発明は、先行車の走行路逸脱のおそれを考慮して自車に迫るリスクを回避する車両用制御装置の提供を目的とする。
【解決手段】 算出手段3によって算出された自車前方の先行車の速度や加速度と走行路情報取得手段4によって取得された自車前方のコーナー情報との対照によって、先行車逸脱確率算出手段6は、先行車がコーナーから逸脱する可能性を算出する。制御態様設定手段7は、その算出結果に応じて先行車の逸脱による影響を事前に対処可能なように自車の制御態様を設定する。通報手段8は、先行車の代わりに自車側がしかるべきところにその逸脱事故を通報する。
【解決手段】 算出手段3によって算出された自車前方の先行車の速度や加速度と走行路情報取得手段4によって取得された自車前方のコーナー情報との対照によって、先行車逸脱確率算出手段6は、先行車がコーナーから逸脱する可能性を算出する。制御態様設定手段7は、その算出結果に応じて先行車の逸脱による影響を事前に対処可能なように自車の制御態様を設定する。通報手段8は、先行車の代わりに自車側がしかるべきところにその逸脱事故を通報する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行路からの逸脱に関する情報を用いて車両制御を実行する車両用制御装置に関する。
【背景技術】
【0002】
従来から、自車が走行路を逸脱する可能性が高い場合、逸脱防止用の操舵トルクを付与することによって自車の姿勢を走行路に対し平行にする車線逸脱防止装置が知られている(例えば、特許文献1)。
【特許文献1】特開2004−26031号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述の従来技術の装置は、「自車」の車線逸脱の可能性を判断して自車の車線逸脱制御を実施しているものの、「先行車」の車線逸脱による影響の考慮ができるものではなかった。例えば、後続車のドライバーが先行車の車線逸脱につられてしまい運転操作を誤ってしまうことが考えられる。
【0004】
そこで、本発明は、先行車の走行路逸脱のおそれを考慮して自車に迫るリスクを回避する車両用制御装置の提供を目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本発明の一局面によれば、
自車前方の先行車の走行状態を検出する検出手段と、
自車前方の走行路情報を取得する取得手段と、
前記検出手段により検出された先行車が前記取得手段により取得された走行路から逸脱する確率を算出する算出手段とを備えることを特徴とする車両用制御装置が提供される。
【0006】
本局面によれば、検出手段によって検出された自車前方の先行車の走行状態と取得手段によって取得された自車前方の走行路情報との対照によって、先行車が走行路から逸脱する可能性が推定可能となる。したがって、先行車が走行路を逸脱する可能性があれば、後続車(すなわち、自車)側はその可能性に応じた対処を事前に行うことができる。
【0007】
また、前記算出手段の算出結果に応じて自車の制御態様を設定する設定手段を備えることが好ましい。これにより、先行車の逸脱確率が高ければ自車側がその逸脱に影響される可能性が高いとして自車の制御態様が適切に設定され得る。また、先行車の逸脱確率が低ければ自車側がその逸脱に影響される可能性が低いとして自車の制御態様が適切に設定され得る。
【0008】
また、前記設定手段は、前記算出手段が所定値以上の逸脱確率を算出した場合、自車の制御態様として所定のリスク回避制御を選択することが好ましい。これにより、先行車の逸脱する可能性が高ければ、自車側の安全確保を事前に行うことができる。
【0009】
また、前記所定のリスク回避制御には、自車を減速させる制御、自車の回頭性を上げる制御、自車と障害物との衝突の予知結果に基づいて作動する衝突被害軽減装置を該予知結果によらずに作動させる制御が挙げられる。これにより、先行車の逸脱する可能性が高ければ、自車を止められるように減速させたり、自車の運動特性を回避性能側にシフトさせたり、衝突予知が行われていなくても衝突被害軽減装置を作動させたりして、余裕をもったリスク回避が可能となる。
【0010】
また、前記検出手段により検出された先行車の走行状態について所定の通報先に連絡する連絡手段を備えることが好ましい。これにより、先行車が走行路逸脱による事故を起こしたとしても、先行車の代わりに自車側がしかるべきところにその事故を通報できるようになる。
【発明の効果】
【0011】
本発明によれば、先行車の走行路逸脱のおそれを考慮して自車に迫るリスクを回避することができる。
【発明を実施するための最良の形態】
【0012】
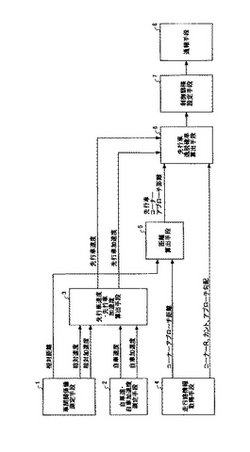
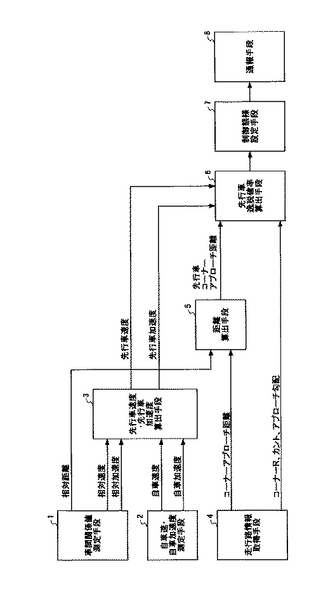
以下、図面を参照して、本発明を実施するための最良の形態の説明を行う。図1は本発明の車両用制御装置の構成を示すブロック図の一例である。本車両用制御装置は、車間関係値測定手段1、自車速度・自車加速度測定手段2、先行車速度・先行車加速度算出手段3、走行路情報取得手段4、距離算出手段5、先行車逸脱確率算出手段6、制御態様設定手段7及び通報手段8を備える。各構成手段は、CPU,ROM,RAM及び電子回路等によって実現され得る。
【0013】
車間関係値測定手段1は、ミリ波レーダ、レーザーレーダ、超音波レーダまたはステレオカメラ等を用いて、自車と先行車との車間関係値(相対距離、相対速度、相対加速度、車間時間等)を測定するものである。相対距離や車間時間は、レーダが送受信する波の送受信タイミングと波の速さとの関係から容易に算出可能である。算出された相対距離の時間変化から相対速度(先行車に対する自車の速度)が求められ、相対速度の時間変化から相対加速度が求められる。また、ステレオカメラの場合には、左右に配置された撮像素子(CCD:Charge Coupled Device)による撮像画像間の視差を求めることによって、相対距離が算出される。一方の撮像素子による画像と他方の撮像素子による画像とを重ね合わせると、先行車が左右横方向にずれる。そして、片方の画像を1画素ずつシフトしながら最も重なり合う位置を求める。このときシフトした画素数をnとする。レンズの焦点距離をf、光軸間の距離をm、画素ピッチをdとすると、自車から先行車までの相対距離Lは、L=(f・m)/(n・d)という関係式が成立する。なお、(n・d)を視差という。この関係式に基づいて算出された相対距離Lから、上記と同様にして、相対速度や相対加速度が算出可能である。
【0014】
自車速度・自車加速度測定手段2は、車輪速センサを用いて自車の速度を測定し、その測定された速度の時間変化から自車の加速度を測定するものである。
【0015】
先行車速度・先行車加速度算出手段3は、測定手段2によって測定された自車の速度と測定手段1によって求められた相対速度との関係に基づいて先行車の速度を求め、測定手段2によって測定された自車の加速度と測定手段1によって求められた相対加速度との関係に基づいて先行車の加速度を求めるものである。
【0016】
走行路情報取得手段4は、GPS(Global Positioning System)受信機によるGPS衛星からの受信情報と地図データベース内の詳細な地図情報に基づいて、自車の地図上での位置情報を取得するものである。この詳細な地図情報には、車両が走行する一般道や高速道路等に関する走行路情報や、お店やビル等の建物に関する情報が含まれる。走行路情報には、例えば、コーナーの半径、カント、曲率、路面傾斜角、車線数、車線幅、踏切、交差点、分岐点、横断歩道、ガードレール、歩道といった数値情報や設備情報が含まれる。走行路上の渋滞情報を含めてもよい。したがって、走行路情報取得手段4は、自車の地図上の位置情報と走行路情報に基づいて、自車の位置と自車前方の或る地点との関係を導出することができる。例えば、自車前方のコーナーのアプローチ点までの距離を算出することができる。
【0017】
距離算出手段5は、車間関係値測定手段1によって算出された自車と先行車との相対距離と走行路情報取得手段4によって算出された自車前方のコーナーのアプローチ点までの距離との関係から、先行車の位置からそのアプローチ点までの距離を算出する。
【0018】
先行車逸脱確率算出手段6は、算出手段3によって算出された先行車速度や先行車加速度と、走行路情報取得手段4によって取得された自車前方(先行車前方)のコーナーの半径やカントやコーナーアプローチ勾配等と、距離算出手段5によって算出された先行車コーナーアプローチ距離とに基づいて、先行車がそのコーナーを逸脱する確率を算出する。例えば、コーナーの半径とそのコーナーへの安全なアプローチ速度との関係を定めるマップに基づいて、先行車のコーナーの逸脱確率を算出する。車両の速度等とコーナーの半径と逸脱確率との関係について車両の走行シミュレーションによって事前に得られた結果が、そのマップに反映されている。
【0019】
この逸脱確率は、実際のコーナーアプローチ速度と上記マップで定める安全なアプローチ速度との差に応じて変化する。コーナーへアプローチする先行車の速度が上記マップで定める安全なアプローチ速度よりも所定値以上遅ければ逸脱する可能性は小さいとして逸脱確率がα(例えば、5%)と算出され、所定値以上速ければ逸脱する可能性は大きいとして逸脱確率がβ(例えば、80%)と算出される。もちろん、逸脱確率の具体的な算出方法は、車両のシステム仕様等に従って所望の方法を用いればよい。
【0020】
なお、このマップは、アプローチ加速度その他の車両の走行状態や走行路情報に応じて補正されてよい。例えば、アプローチ加速度が大きい、コーナーの曲率が小さい、車線幅が狭い等の場合、算出される逸脱確率が大きくなる方向に重み付けされる。
【0021】
制御態様設定手段7は、先行車逸脱確率演算手段6により算出された逸脱確率に応じて自車の制御態様を設定するものである。算出された逸脱確率に応じて作動させるべき装置や制御が割り当てられている。例えば、算出された逸脱確率が80%以上の場合、安全装置等の作動を行うリスク回避制御が設定される。
【0022】
安全装置には、クッションとなるバッグを膨らませるエアバック装置、シートベルトの弛みをとるプリテンショナ付シートベルト、ブレーキの制動力をアシストするブレーキアシスト装置、シートの位置を適正位置に戻すことが可能なシート調節装置、リスク回避制御の実行を音声情報や視覚情報で乗員に知らせる警報装置、衝撃緩和のためにバンパ位置を調整するバンパ移動装置等が挙げられる。
なお、「安全装置の作動」とは、プリテンショナ付シートベルトが締まる(シートベルトの弛みをとるモーターが作動する)等の安全装置が乗員に対して実際に働きかける動作をすることを表すだけでなく、不測の事態に備えて安全装置内で準備動作をすることも含むものである。例えば、エアバッグ装置の点火判定の閾値を下げるという準備動作が挙げられる。
【0023】
また、制御態様設定手段7によって設定されるリスク回避するための装置や制御として、電動パワーステアリング装置やロール剛性可変制御等がある。電動パワーステアリング装置は、走行状態に応じてステアリングホイール操舵のアシストトルクを任意に変化させることができ、ステアリングホイールの操舵に必要な操舵荷重を調整することができる。アシストトルクを調整することによって、車両の回頭性を重視する方向にステアリング特性を変更することが可能となる。また、ロール剛性可変制御は、旋回中に前輪側スタビライザと後輪側スタビライザに作用するロール剛性力の前後配分を調整することによって、旋回初期の回頭性と終期の収斂性を良好に保つことができる。
【0024】
つまり、先行車の逸脱確率に応じてこれらの装置や制御をリスクに備えて作動させておくことで、事故に巻き込まれる等の自車に迫る不測の事態に対して、自車や乗員の安全確保を適切に図ることができる。
【0025】
通報手段8は、所定の通報先に連絡可能な連絡手段である。警察、消防及び道路サービス業者等に無線通信を介しての通報を可能にする。先行車逸脱確率算出手段6により算出された逸脱確率が例えば100%になった場合、「先行車は走行路を逸脱した」として、これらの通報先に事故発生の情報が自動的に発信される。例えば、110番や119番に自動ダイアルされる。走行路情報取得手段4により取得される事故位置や住所等の事故現場を特定可能な情報が自動音声による通話によって伝えられる。また、自動ダイアル後、後続車である自車のドライバー自らが、それらの情報を伝えるものであってもよい。なお、車間関係値測定手段1による先行車の測定が不能になって、ステレオカメラ等により実際に先行車が走行路を逸脱したことを確認後に、これらの通報先に事故発生の情報が発信されるようにしてもよい。
【0026】
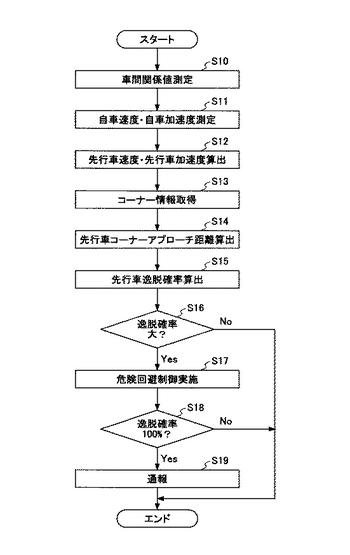
上述した本発明の車両用制御装置の実施形態についての動作は、図2のフローチャートで表現される。
【0027】
自車と先行車との車間関係値(相対距離、相対速度、相対加速度、車間時間等)の測定が行われるとともに(ステップ10)、自車の速度と加速度の測定が行われることによって(ステップ11)、先行車の速度と加速度が算出される(ステップ12)。地図データベース内の地図情報から自車前方のコーナーに関する位置情報等が読み出され(ステップ13)、ステップ10で測定された相対距離に基づいて、先行車の位置からそのコーナーのアプローチ点までの距離が算出される(ステップ14)。ステップ12で算出された先行車速度や先行車加速度と、ステップ13で取得された自車前方(先行車前方)のコーナーの半径やカントやコーナーアプローチ勾配等と、ステップ14で算出された先行車コーナーアプローチ距離とに基づいて、先行車がそのコーナーを逸脱する確率が算出される(ステップ15)。ステップ15で算出された逸脱確率が所定値以上であれば(ステップ16;Yes)、安全装置等の作動を行うリスク回避制御が実行される(ステップ17)。さらに、その逸脱確率が100%であれば(ステップ18;Yes)、先行車が走行路を逸脱する事故が発生したとして、警察、消防及び道路サービス業者等に自動通報される(ステップ19)。
【0028】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形及び置換を加えることができる。
【0029】
また、上述した実施例は先行車がコーナーにさしかかる場面であったが、先行車が交差点や分岐点にさしかかる場面であっても、本発明の車両用制御装置は同様に適用され得る。先行車が交差点や分岐点で出会い頭に衝突事故を起こした場合に、後続車である自車がその事故に巻き込まれないように事前にリスク回避制御が行われる。万が一、巻き込まれたとしても、早い時期からリスク回避制御が行われているので、より高い安全性が適切に確保され得る。
【0030】
また、先行車の位置情報やコーナーの位置情報を取得する手段として、走行路の特定ポイント毎に設置されている車両検知装置を用いてもよい。車両検知装置は、赤外線等を利用して所定距離内で自己に接近する車両を検出する車両検出センサと、その車両検出結果を周辺車両に向けて送信する送信装置とを有している。この車両検知装置からの情報を自車が取得することによって、先行車がコーナーのどのあたりを走行しているのかの把握が可能となる。
【図面の簡単な説明】
【0031】
【図1】本発明の車両用制御装置の構成を示すブロック図の一例である。
【図2】本発明の車両用制御装置の動作を示すフローチャートの一例である。
【符号の説明】
【0032】
1 車間関係値測定手段
2 自車速度・自車加速度測定手段
3 先行車速度・先行車加速度算出手段
4 走行路情報取得手段
5 距離算出手段
6 先行車逸脱確率算出手段
7 制御態様設定手段
8 通報手段
【技術分野】
【0001】
本発明は、走行路からの逸脱に関する情報を用いて車両制御を実行する車両用制御装置に関する。
【背景技術】
【0002】
従来から、自車が走行路を逸脱する可能性が高い場合、逸脱防止用の操舵トルクを付与することによって自車の姿勢を走行路に対し平行にする車線逸脱防止装置が知られている(例えば、特許文献1)。
【特許文献1】特開2004−26031号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上述の従来技術の装置は、「自車」の車線逸脱の可能性を判断して自車の車線逸脱制御を実施しているものの、「先行車」の車線逸脱による影響の考慮ができるものではなかった。例えば、後続車のドライバーが先行車の車線逸脱につられてしまい運転操作を誤ってしまうことが考えられる。
【0004】
そこで、本発明は、先行車の走行路逸脱のおそれを考慮して自車に迫るリスクを回避する車両用制御装置の提供を目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本発明の一局面によれば、
自車前方の先行車の走行状態を検出する検出手段と、
自車前方の走行路情報を取得する取得手段と、
前記検出手段により検出された先行車が前記取得手段により取得された走行路から逸脱する確率を算出する算出手段とを備えることを特徴とする車両用制御装置が提供される。
【0006】
本局面によれば、検出手段によって検出された自車前方の先行車の走行状態と取得手段によって取得された自車前方の走行路情報との対照によって、先行車が走行路から逸脱する可能性が推定可能となる。したがって、先行車が走行路を逸脱する可能性があれば、後続車(すなわち、自車)側はその可能性に応じた対処を事前に行うことができる。
【0007】
また、前記算出手段の算出結果に応じて自車の制御態様を設定する設定手段を備えることが好ましい。これにより、先行車の逸脱確率が高ければ自車側がその逸脱に影響される可能性が高いとして自車の制御態様が適切に設定され得る。また、先行車の逸脱確率が低ければ自車側がその逸脱に影響される可能性が低いとして自車の制御態様が適切に設定され得る。
【0008】
また、前記設定手段は、前記算出手段が所定値以上の逸脱確率を算出した場合、自車の制御態様として所定のリスク回避制御を選択することが好ましい。これにより、先行車の逸脱する可能性が高ければ、自車側の安全確保を事前に行うことができる。
【0009】
また、前記所定のリスク回避制御には、自車を減速させる制御、自車の回頭性を上げる制御、自車と障害物との衝突の予知結果に基づいて作動する衝突被害軽減装置を該予知結果によらずに作動させる制御が挙げられる。これにより、先行車の逸脱する可能性が高ければ、自車を止められるように減速させたり、自車の運動特性を回避性能側にシフトさせたり、衝突予知が行われていなくても衝突被害軽減装置を作動させたりして、余裕をもったリスク回避が可能となる。
【0010】
また、前記検出手段により検出された先行車の走行状態について所定の通報先に連絡する連絡手段を備えることが好ましい。これにより、先行車が走行路逸脱による事故を起こしたとしても、先行車の代わりに自車側がしかるべきところにその事故を通報できるようになる。
【発明の効果】
【0011】
本発明によれば、先行車の走行路逸脱のおそれを考慮して自車に迫るリスクを回避することができる。
【発明を実施するための最良の形態】
【0012】
以下、図面を参照して、本発明を実施するための最良の形態の説明を行う。図1は本発明の車両用制御装置の構成を示すブロック図の一例である。本車両用制御装置は、車間関係値測定手段1、自車速度・自車加速度測定手段2、先行車速度・先行車加速度算出手段3、走行路情報取得手段4、距離算出手段5、先行車逸脱確率算出手段6、制御態様設定手段7及び通報手段8を備える。各構成手段は、CPU,ROM,RAM及び電子回路等によって実現され得る。
【0013】
車間関係値測定手段1は、ミリ波レーダ、レーザーレーダ、超音波レーダまたはステレオカメラ等を用いて、自車と先行車との車間関係値(相対距離、相対速度、相対加速度、車間時間等)を測定するものである。相対距離や車間時間は、レーダが送受信する波の送受信タイミングと波の速さとの関係から容易に算出可能である。算出された相対距離の時間変化から相対速度(先行車に対する自車の速度)が求められ、相対速度の時間変化から相対加速度が求められる。また、ステレオカメラの場合には、左右に配置された撮像素子(CCD:Charge Coupled Device)による撮像画像間の視差を求めることによって、相対距離が算出される。一方の撮像素子による画像と他方の撮像素子による画像とを重ね合わせると、先行車が左右横方向にずれる。そして、片方の画像を1画素ずつシフトしながら最も重なり合う位置を求める。このときシフトした画素数をnとする。レンズの焦点距離をf、光軸間の距離をm、画素ピッチをdとすると、自車から先行車までの相対距離Lは、L=(f・m)/(n・d)という関係式が成立する。なお、(n・d)を視差という。この関係式に基づいて算出された相対距離Lから、上記と同様にして、相対速度や相対加速度が算出可能である。
【0014】
自車速度・自車加速度測定手段2は、車輪速センサを用いて自車の速度を測定し、その測定された速度の時間変化から自車の加速度を測定するものである。
【0015】
先行車速度・先行車加速度算出手段3は、測定手段2によって測定された自車の速度と測定手段1によって求められた相対速度との関係に基づいて先行車の速度を求め、測定手段2によって測定された自車の加速度と測定手段1によって求められた相対加速度との関係に基づいて先行車の加速度を求めるものである。
【0016】
走行路情報取得手段4は、GPS(Global Positioning System)受信機によるGPS衛星からの受信情報と地図データベース内の詳細な地図情報に基づいて、自車の地図上での位置情報を取得するものである。この詳細な地図情報には、車両が走行する一般道や高速道路等に関する走行路情報や、お店やビル等の建物に関する情報が含まれる。走行路情報には、例えば、コーナーの半径、カント、曲率、路面傾斜角、車線数、車線幅、踏切、交差点、分岐点、横断歩道、ガードレール、歩道といった数値情報や設備情報が含まれる。走行路上の渋滞情報を含めてもよい。したがって、走行路情報取得手段4は、自車の地図上の位置情報と走行路情報に基づいて、自車の位置と自車前方の或る地点との関係を導出することができる。例えば、自車前方のコーナーのアプローチ点までの距離を算出することができる。
【0017】
距離算出手段5は、車間関係値測定手段1によって算出された自車と先行車との相対距離と走行路情報取得手段4によって算出された自車前方のコーナーのアプローチ点までの距離との関係から、先行車の位置からそのアプローチ点までの距離を算出する。
【0018】
先行車逸脱確率算出手段6は、算出手段3によって算出された先行車速度や先行車加速度と、走行路情報取得手段4によって取得された自車前方(先行車前方)のコーナーの半径やカントやコーナーアプローチ勾配等と、距離算出手段5によって算出された先行車コーナーアプローチ距離とに基づいて、先行車がそのコーナーを逸脱する確率を算出する。例えば、コーナーの半径とそのコーナーへの安全なアプローチ速度との関係を定めるマップに基づいて、先行車のコーナーの逸脱確率を算出する。車両の速度等とコーナーの半径と逸脱確率との関係について車両の走行シミュレーションによって事前に得られた結果が、そのマップに反映されている。
【0019】
この逸脱確率は、実際のコーナーアプローチ速度と上記マップで定める安全なアプローチ速度との差に応じて変化する。コーナーへアプローチする先行車の速度が上記マップで定める安全なアプローチ速度よりも所定値以上遅ければ逸脱する可能性は小さいとして逸脱確率がα(例えば、5%)と算出され、所定値以上速ければ逸脱する可能性は大きいとして逸脱確率がβ(例えば、80%)と算出される。もちろん、逸脱確率の具体的な算出方法は、車両のシステム仕様等に従って所望の方法を用いればよい。
【0020】
なお、このマップは、アプローチ加速度その他の車両の走行状態や走行路情報に応じて補正されてよい。例えば、アプローチ加速度が大きい、コーナーの曲率が小さい、車線幅が狭い等の場合、算出される逸脱確率が大きくなる方向に重み付けされる。
【0021】
制御態様設定手段7は、先行車逸脱確率演算手段6により算出された逸脱確率に応じて自車の制御態様を設定するものである。算出された逸脱確率に応じて作動させるべき装置や制御が割り当てられている。例えば、算出された逸脱確率が80%以上の場合、安全装置等の作動を行うリスク回避制御が設定される。
【0022】
安全装置には、クッションとなるバッグを膨らませるエアバック装置、シートベルトの弛みをとるプリテンショナ付シートベルト、ブレーキの制動力をアシストするブレーキアシスト装置、シートの位置を適正位置に戻すことが可能なシート調節装置、リスク回避制御の実行を音声情報や視覚情報で乗員に知らせる警報装置、衝撃緩和のためにバンパ位置を調整するバンパ移動装置等が挙げられる。
なお、「安全装置の作動」とは、プリテンショナ付シートベルトが締まる(シートベルトの弛みをとるモーターが作動する)等の安全装置が乗員に対して実際に働きかける動作をすることを表すだけでなく、不測の事態に備えて安全装置内で準備動作をすることも含むものである。例えば、エアバッグ装置の点火判定の閾値を下げるという準備動作が挙げられる。
【0023】
また、制御態様設定手段7によって設定されるリスク回避するための装置や制御として、電動パワーステアリング装置やロール剛性可変制御等がある。電動パワーステアリング装置は、走行状態に応じてステアリングホイール操舵のアシストトルクを任意に変化させることができ、ステアリングホイールの操舵に必要な操舵荷重を調整することができる。アシストトルクを調整することによって、車両の回頭性を重視する方向にステアリング特性を変更することが可能となる。また、ロール剛性可変制御は、旋回中に前輪側スタビライザと後輪側スタビライザに作用するロール剛性力の前後配分を調整することによって、旋回初期の回頭性と終期の収斂性を良好に保つことができる。
【0024】
つまり、先行車の逸脱確率に応じてこれらの装置や制御をリスクに備えて作動させておくことで、事故に巻き込まれる等の自車に迫る不測の事態に対して、自車や乗員の安全確保を適切に図ることができる。
【0025】
通報手段8は、所定の通報先に連絡可能な連絡手段である。警察、消防及び道路サービス業者等に無線通信を介しての通報を可能にする。先行車逸脱確率算出手段6により算出された逸脱確率が例えば100%になった場合、「先行車は走行路を逸脱した」として、これらの通報先に事故発生の情報が自動的に発信される。例えば、110番や119番に自動ダイアルされる。走行路情報取得手段4により取得される事故位置や住所等の事故現場を特定可能な情報が自動音声による通話によって伝えられる。また、自動ダイアル後、後続車である自車のドライバー自らが、それらの情報を伝えるものであってもよい。なお、車間関係値測定手段1による先行車の測定が不能になって、ステレオカメラ等により実際に先行車が走行路を逸脱したことを確認後に、これらの通報先に事故発生の情報が発信されるようにしてもよい。
【0026】
上述した本発明の車両用制御装置の実施形態についての動作は、図2のフローチャートで表現される。
【0027】
自車と先行車との車間関係値(相対距離、相対速度、相対加速度、車間時間等)の測定が行われるとともに(ステップ10)、自車の速度と加速度の測定が行われることによって(ステップ11)、先行車の速度と加速度が算出される(ステップ12)。地図データベース内の地図情報から自車前方のコーナーに関する位置情報等が読み出され(ステップ13)、ステップ10で測定された相対距離に基づいて、先行車の位置からそのコーナーのアプローチ点までの距離が算出される(ステップ14)。ステップ12で算出された先行車速度や先行車加速度と、ステップ13で取得された自車前方(先行車前方)のコーナーの半径やカントやコーナーアプローチ勾配等と、ステップ14で算出された先行車コーナーアプローチ距離とに基づいて、先行車がそのコーナーを逸脱する確率が算出される(ステップ15)。ステップ15で算出された逸脱確率が所定値以上であれば(ステップ16;Yes)、安全装置等の作動を行うリスク回避制御が実行される(ステップ17)。さらに、その逸脱確率が100%であれば(ステップ18;Yes)、先行車が走行路を逸脱する事故が発生したとして、警察、消防及び道路サービス業者等に自動通報される(ステップ19)。
【0028】
以上、本発明の好ましい実施例について詳説したが、本発明は、上述した実施例に制限されることはなく、本発明の範囲を逸脱することなく、上述した実施例に種々の変形及び置換を加えることができる。
【0029】
また、上述した実施例は先行車がコーナーにさしかかる場面であったが、先行車が交差点や分岐点にさしかかる場面であっても、本発明の車両用制御装置は同様に適用され得る。先行車が交差点や分岐点で出会い頭に衝突事故を起こした場合に、後続車である自車がその事故に巻き込まれないように事前にリスク回避制御が行われる。万が一、巻き込まれたとしても、早い時期からリスク回避制御が行われているので、より高い安全性が適切に確保され得る。
【0030】
また、先行車の位置情報やコーナーの位置情報を取得する手段として、走行路の特定ポイント毎に設置されている車両検知装置を用いてもよい。車両検知装置は、赤外線等を利用して所定距離内で自己に接近する車両を検出する車両検出センサと、その車両検出結果を周辺車両に向けて送信する送信装置とを有している。この車両検知装置からの情報を自車が取得することによって、先行車がコーナーのどのあたりを走行しているのかの把握が可能となる。
【図面の簡単な説明】
【0031】
【図1】本発明の車両用制御装置の構成を示すブロック図の一例である。
【図2】本発明の車両用制御装置の動作を示すフローチャートの一例である。
【符号の説明】
【0032】
1 車間関係値測定手段
2 自車速度・自車加速度測定手段
3 先行車速度・先行車加速度算出手段
4 走行路情報取得手段
5 距離算出手段
6 先行車逸脱確率算出手段
7 制御態様設定手段
8 通報手段
【特許請求の範囲】
【請求項1】
自車前方の先行車の走行状態を検出する検出手段と、
自車前方の走行路情報を取得する取得手段と、
前記検出手段により検出された先行車が前記取得手段により取得された走行路から逸脱する確率を算出する算出手段とを備えることを特徴とする車両用制御装置。
【請求項2】
前記算出手段の算出結果に応じて自車の制御態様を設定する設定手段を備える請求項1記載の車両用制御装置。
【請求項3】
前記設定手段は、前記算出手段が所定値以上の逸脱確率を算出した場合、自車の制御態様として所定のリスク回避制御を選択する請求項2記載の車両用制御装置。
【請求項4】
前記所定のリスク回避制御は、自車を減速させる制御である請求項3記載の車両用制御装置。
【請求項5】
前記所定のリスク回避制御は、自車の回頭性を上げる制御である請求項3記載の車両用制御装置。
【請求項6】
前記所定のリスク回避制御は、自車と障害物との衝突の予知結果に基づいて作動する衝突被害軽減装置を該予知結果によらずに作動させる制御である請求項3記載の車両用制御装置。
【請求項7】
前記検出手段により検出された先行車の走行状態について所定の通報先に連絡する連絡手段を備える請求項1から6のいずれかに記載の車両用制御装置。
【請求項1】
自車前方の先行車の走行状態を検出する検出手段と、
自車前方の走行路情報を取得する取得手段と、
前記検出手段により検出された先行車が前記取得手段により取得された走行路から逸脱する確率を算出する算出手段とを備えることを特徴とする車両用制御装置。
【請求項2】
前記算出手段の算出結果に応じて自車の制御態様を設定する設定手段を備える請求項1記載の車両用制御装置。
【請求項3】
前記設定手段は、前記算出手段が所定値以上の逸脱確率を算出した場合、自車の制御態様として所定のリスク回避制御を選択する請求項2記載の車両用制御装置。
【請求項4】
前記所定のリスク回避制御は、自車を減速させる制御である請求項3記載の車両用制御装置。
【請求項5】
前記所定のリスク回避制御は、自車の回頭性を上げる制御である請求項3記載の車両用制御装置。
【請求項6】
前記所定のリスク回避制御は、自車と障害物との衝突の予知結果に基づいて作動する衝突被害軽減装置を該予知結果によらずに作動させる制御である請求項3記載の車両用制御装置。
【請求項7】
前記検出手段により検出された先行車の走行状態について所定の通報先に連絡する連絡手段を備える請求項1から6のいずれかに記載の車両用制御装置。
【図1】


【図2】
【図2】
【公開番号】特開2006−240444(P2006−240444A)
【公開日】平成18年9月14日(2006.9.14)
【国際特許分類】
【出願番号】特願2005−57648(P2005−57648)
【出願日】平成17年3月2日(2005.3.2)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成18年9月14日(2006.9.14)
【国際特許分類】
【出願日】平成17年3月2日(2005.3.2)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]