
車両用制御装置
【課題】車両の旋回特性を制御できる車両用制御装置を提供すること。
【解決手段】車両用制御装置100によれば、状態量取得手段により車両の状態量が取得され、その車両の状態量に基づいてスタビリティファクタ演算手段により車両のスタビリティファクタが演算される。演算されたスタビリティファクタと別途定める基準スタビリティファクタとが比較手段により比較され、その比較結果に基づいて第1キャンバ角調整手段によりキャンバ角調整装置44が駆動され、前輪および後輪の少なくとも一つのキャンバ角が調整される。スタビリティファクタは車両の旋回特性を表すため、スタビリティファクタに基づいて車輪のキャンバ角を調整することにより車両の旋回特性を制御できる。
【解決手段】車両用制御装置100によれば、状態量取得手段により車両の状態量が取得され、その車両の状態量に基づいてスタビリティファクタ演算手段により車両のスタビリティファクタが演算される。演算されたスタビリティファクタと別途定める基準スタビリティファクタとが比較手段により比較され、その比較結果に基づいて第1キャンバ角調整手段によりキャンバ角調整装置44が駆動され、前輪および後輪の少なくとも一つのキャンバ角が調整される。スタビリティファクタは車両の旋回特性を表すため、スタビリティファクタに基づいて車輪のキャンバ角を調整することにより車両の旋回特性を制御できる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、特に、車両の旋回特性を制御できる車両用制御装置に関するものである。
【背景技術】
【0002】
従来より、車両の走行状態に応じて車輪のキャンバ角を調整することで、車両の走行安定性を確保する技術が知られている。この種の技術に関し、例えば特許文献1には、車両が所定の速度以上で走行するときにネガティブキャンバを車輪に付与することで、車両の走行安定性を向上させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開昭60−193781号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した特許文献1に開示される技術では、車両の走行速度を車輪のキャンバ角を調整するパラメータとしているが、車両の走行速度は車両の旋回特性の直接的なパラメータではないので、車輪のキャンバ角を調整することで車両の旋回特性を制御することができず、車輪のキャンバ角を調整することで逆に車両の旋回性が低下するおそれがあった。
【0005】
本発明は、上述した問題点を解決するためになされたものであり、車両の旋回特性を制御できる車両用制御装置を提供することを目的としている。
【課題を解決するための手段および発明の効果】
【0006】
この目的を達成するために請求項1記載の車両用制御装置によれば、状態量取得手段により車両の状態量が取得され、その車両の状態量に基づいてスタビリティファクタ演算手段により車両のスタビリティファクタが演算される。演算されたスタビリティファクタと別途定める基準スタビリティファクタとが比較手段により比較され、その比較結果に基づいて第1キャンバ角調整手段によりキャンバ角調整装置が駆動され、前輪および後輪の少なくとも一つのキャンバ角が調整される。スタビリティファクタは車両の旋回特性を表すため、スタビリティファクタに基づいて車輪のキャンバ角を調整することにより車両の旋回特性を制御できる効果がある。
【0007】
請求項2記載の車両用制御装置によれば、比較手段による比較結果は、車両のスタビリティファクタと基準スタビリティファクタとの偏差であり、その偏差が小さくなるように第1キャンバ角調整手段によりキャンバ角調整装置が駆動され、車輪のキャンバ角が調整される。これにより、請求項1の効果に加え、車両の旋回特性を別途定められた旋回特性に近づけて安定化できる効果がある。
【0008】
請求項3記載の車両用制御装置によれば、比較手段により車両のスタビリティファクタが基準スタビリティファクタより小さいと判断される場合に、第1キャンバ角調整手段によりキャンバ角調整装置が駆動され車輪のキャンバ角が調整される。ここで、スタビリティファクタが小さくなるのはオーバーステア傾向であり車両が不安定になり、スタビリティファクタが大きくなるのはアンダーステア傾向である。車両のスタビリティファクタが基準スタビリティファクタより小さいと判断される場合に車輪のキャンバ角が調整されるので、車両のスタビリティファクタを大きくすることができ、請求項1又は2の効果に加え、車両をアンダーステア傾向に制御できる効果がある。
【0009】
請求項4記載の車両用制御装置によれば、状態量取得手段により車両の状態量が取得され、その車両の状態量が所定の条件を満たすか状態量判断手段により判断される。判断の結果、車両の状態量が所定の条件を満たすと判断される場合に、第2キャンバ角調整手段によりキャンバ角調整装置が駆動され前輪および後輪の少なくとも一つのキャンバ角が調整される。また、状態量取得手段により取得される車両の状態量に基づいてスタビリティファクタ演算手段により車両のスタビリティファクタが演算され、そのスタビリティファクタに基づいて第1条件変更手段により所定の条件が変更される。スタビリティファクタは車両の旋回特性を表すところ、スタビリティファクタに基づいて車輪のキャンバ角が調整される条件が変更されるので、車輪のキャンバ角の調整により車両の旋回特性を制御できる効果がある。
【0010】
請求項5記載の車両用制御装置によれば、演算されたスタビリティファクタと別途定める基準スタビリティファクタとが比較手段により比較され、スタビリティファクタが基準スタビリティファクタより小さいと判断される場合に、第1条件変更手段により所定の条件が変更される。ここで、スタビリティファクタが小さくなるのはオーバーステア傾向であり車両が不安定になり、スタビリティファクタが大きくなるのはアンダーステア傾向である。車両のスタビリティファクタが基準スタビリティファクタより小さいと判断される場合に車輪のキャンバ角が調整される条件が変更されるので、車輪のキャンバ角の調整により車両のスタビリティファクタを大きくすることができ、請求項4の効果に加え、車両をアンダーステア傾向に制御できる効果がある。
【0011】
請求項6記載の車両用制御装置によれば、状態量取得手段は、前輪および後輪の輪荷重に関する情報を取得する輪荷重情報取得手段を備えている。ここで、スタビリティファクタは前輪および後輪が発生するコーナリングパワーの配分によって変化し、そのコーナリングパワーは前輪および後輪の輪荷重により変化する。輪荷重情報取得手段により前輪および後輪の輪荷重に関する情報が取得されることで、その輪荷重に関する情報に基づいてスタビリティファクタを演算できる。これによりスタビリティファクタの演算精度を向上させることができ、請求項1から5のいずれかの効果に加え、車両の制御の安定性を向上できる。
【0012】
請求項7記載の車両用制御装置によれば、基準スタビリティファクタは車両が水平面を一定の速度で走行するときの値に設定されているので、車両が坂道を走行する場合には、坂道を走行する車両のスタビリティファクタと、水平面を走行する車両のスタビリティファクタとに基づいて車輪のキャンバ角が調整される。車両が坂道を走行するときと水平面を走行するときとでは、各車輪の輪荷重が変化し、それに伴いスタビリティファクタが変化する。基準スタビリティファクタを車両が水平面を一定の速度で走行するときの値に設定することにより、車両が坂道を走行して輪荷重が変化する影響を考慮して、車輪のキャンバ角を調整できる。これにより、請求項1から6のいずれかの効果に加え、車両が坂道を走行するときと水平面を一定の速度で走行するときとで旋回特性が変わらないように制御することができる効果がある。
【0013】
請求項8記載の車両用制御装置によれば、状態量取得手段により車両の状態量が取得され、その車両の状態量が所定の条件を満たすか状態量判断手段により判断される。判断の結果、車両の状態量が所定の条件を満たすと判断される場合に、第2キャンバ角調整手段によりキャンバ角調整装置が駆動され前輪および後輪の少なくとも一つのキャンバ角が調整される。また、車両の進行方向において水平面に対する車両の傾斜角度が傾斜角度取得手段により取得され、その傾斜角度に基づいて第2条件変更手段により所定の条件が変更される。車両の進行方向において水平面に対する車両の傾斜角度が変わると車両の旋回特性が変わるところ、車両の傾斜角度に基づいて車輪のキャンバ角が調整される条件が変更されるので、車輪のキャンバ角の調整により車両の旋回特性を制御できる効果がある。
【0014】
請求項9記載の車両用制御装置によれば、傾斜角度取得手段により取得される車両の傾斜角度が、車両が降坂路を走行するものに相当すると判断される場合に、第2条件変更手段により所定の条件が変更される。ここで、車両が降坂路を走行するときは車両がオーバーステア傾向になる可能性が高くなるところ、車両の傾斜角度が、車両が降坂路を走行するものに相当すると判断される場合に車輪のキャンバ角が調整される条件が変更されるので、請求項8の効果に加え、車輪のキャンバ角の調整により車両をアンダーステア傾向にすることができる効果がある。
【0015】
請求項10記載の車両用制御装置によれば、第1キャンバ角調整手段または第2キャンバ角調整手段によって駆動されるキャンバ角調整装置により後輪のキャンバ角が調整され、後輪にネガティブキャンバが付与される。後輪にネガティブキャンバが付与されることにより、後輪に発生するキャンバスラストを利用して車両の特性を安定したアンダーステア傾向にすることができるので、請求項1から9のいずれかの効果に加え、車両の旋回安定性を向上できる効果がある。
【図面の簡単な説明】
【0016】
【図1】第1実施の形態における車両用制御装置が搭載される車両を模式的に示した模式図である。
【図2】懸架装置の正面図である。
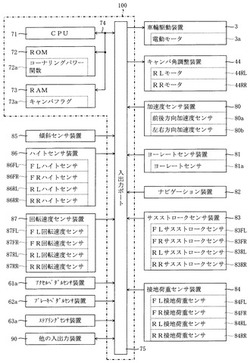
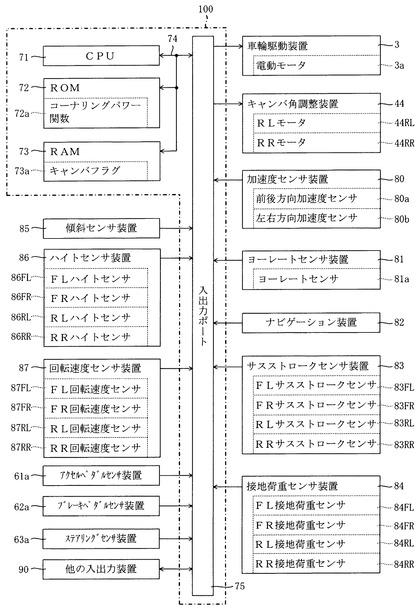
【図3】車両用制御装置の電気的構成を示したブロック図である。
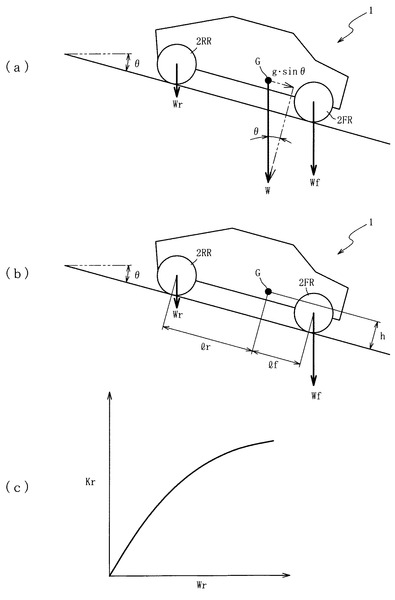
【図4】(a)は車両の傾斜角度の検出方法を説明する模式図であり、(b)は軸重の検出方法を説明する模式図であり、(c)は後輪のコーナリングパワー関数の内容を模式的に示す模式図である。
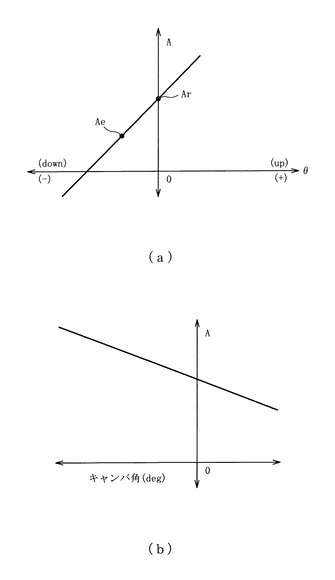
【図5】(a)は車両の傾斜角度とスタビリティファクタとの関係を示す模式図であり、(b)は後輪のキャンバ角とスタビリティファクタとの関係を示す模式図である。
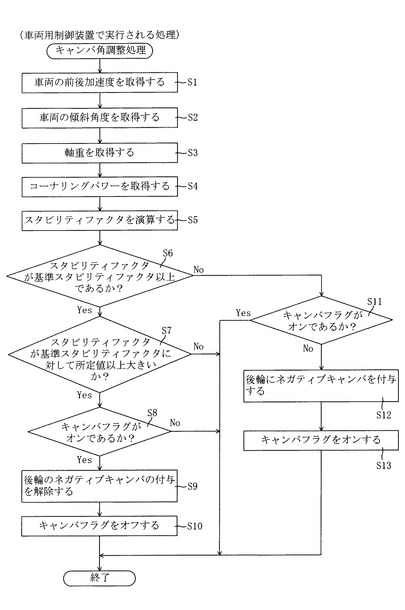
【図6】キャンバ角調整処理を示すフローチャートである。
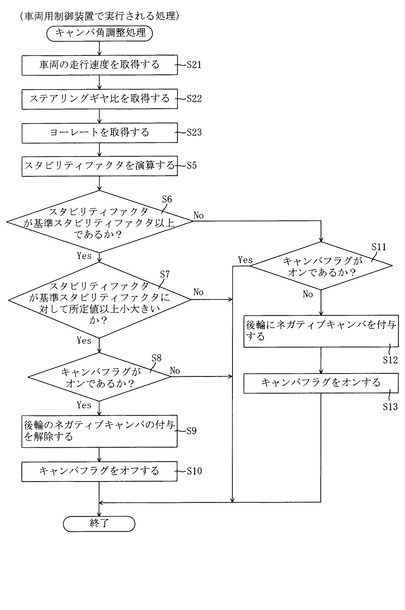
【図7】第2実施の形態におけるキャンバ角調整処理を示すフローチャートである。
【図8】第3実施の形態における車両用制御装置の電気的構成を示したブロック図である。
【図9】閾値関数の内容を模式的に示す模式図である。
【図10】条件変更処理を示すフローチャートである。
【図11】キャンバ角調整処理を示すフローチャートである。
【図12】第4実施の形態における車両用制御装置が搭載される車両を模式的に示した模式図である。
【図13】懸架装置の正面図である。
【図14】前輪のキャンバ角とスタビリティファクタとの関係を示す模式図である。
【図15】第5実施の形態における車両用制御装置に記憶される閾値関数の内容を模式的に示す模式図である。
【図16】条件変更処理を示すフローチャートである。
【発明を実施するための形態】
【0017】
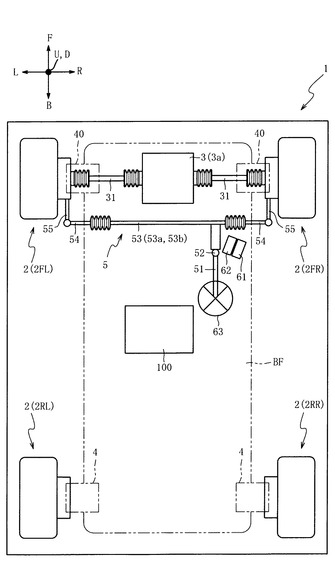
以下、本発明の好ましい実施の形態について添付図面を参照して説明する。図1は、本発明の第1実施の形態における車両用制御装置100が搭載される車両1を模式的に示した模式図である。なお、図1の矢印U−D,L−R,F−Bは、車両1の上下方向、左右方向、前後方向をそれぞれ示している。
【0018】
まず、車両1の概略構成について説明する。車両1は、図1に示すように、車体フレームBFと、その車体フレームBFを支持する複数(本実施の形態では4輪)の車輪2と、それら複数の車輪2の内の一部(本実施の形態では、左右の前輪2FL,2FR)を回転駆動する車輪駆動装置3と、複数の車輪2の内の一部(本実施の形態では、左右の後輪2RL,2RR)を車体フレームBFに懸架する複数の懸架装置4及び複数の車輪2の内の一部(本実施の形態では、左右の前輪2FL,2FR)を車体フレームBFに懸架する複数の懸架装置40と、複数の車輪2の内の一部(本実施の形態では、左右の前輪2FL,2FR)を操舵する操舵装置5とを主に備えて構成されている。
【0019】
次いで、各部の詳細構成について説明する。車輪2は、図1に示すように、車両1の前方側(矢印F方向側)に位置する左右の前輪2FL,2FRと、車両1の後方側(矢印B方向側)に位置する左右の後輪2RL,2RRとを備えている。なお、本実施の形態では、左右の前輪2FL,2FRは、車輪駆動装置3により回転駆動される駆動輪として構成されている。また、車輪2は、左右の前輪2FL,2FR及び左右の後輪2RL,2RRが全て同じ形状、外径および特性に構成されている。なお、左右の後輪2RL,2RRを車体フレームBFに回転可能に支持するシャフト(車軸)及び後輪2RL,2RRを駆動する車輪駆動装置の図示は省略している。
【0020】
車輪駆動装置3は、上述したように、左右の前輪2FL,2FRを回転駆動するための装置であり、後述するように電動モータ3aにより構成されている(図3参照)。また、電動モータ3aは、図1に示すように、デファレンシャルギヤ(図示せず)及び一対のドライブシャフト31(車軸)を介して左右の前輪2FL,2FRに接続されている。
【0021】
運転者がアクセルペダル61を操作した場合には、車輪駆動装置3から左右の前輪2FL,2FRに回転駆動力が付与され、それら左右の前輪2FL,2FRがアクセルペダル61の操作量に応じて回転駆動される。なお、左右の前輪2FL,2FRの回転差は、デファレンシャルギヤにより吸収される。
【0022】
懸架装置4,40は、路面から車輪2を介して車体フレームBFに伝わる振動を緩和するための装置、いわゆるサスペンションとして機能するものであり、伸縮可能に構成され、図1に示すように、懸架装置4は左右の後輪2RL,2RRに、懸架装置40は左右の前輪2FL,2FRにそれぞれ設けられている。また、本実施の形態における懸架装置4は、車輪2のキャンバ角を調整するキャンバ角調整機構としての機能を兼ね備えている。
【0023】
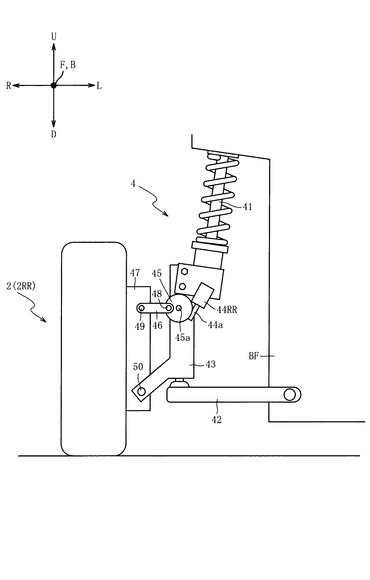
ここで、図2を参照して、懸架装置4の詳細構成について説明する。図2は、懸架装置4の正面図である。なお、ここでは、キャンバ角調整機構として機能する構成のみについて説明し、サスペンションとして機能する構成については周知の構成と同様であるので、その説明を省略する。また、各懸架装置4の構成は、左右の後輪2RL,2RRにおいてそれぞれ共通であるので、右の後輪2RRに対応する懸架装置4を代表例として図2に図示する。但し、図2では、理解を容易とするためにドライブシャフト31等の図示が省略されている。
【0024】
懸架装置4は、図2に示すように、ストラット41及びロアアーム42を介して車体フレームBFに支持されるナックル43と、駆動力を発生するRRモータ44RRと、そのRRモータ44RRの駆動力を伝達するウォームホイール45及びアーム46と、それらウォームホイール45及びアーム46から伝達されるRRモータ44RRの駆動力によりナックル43に対して揺動駆動される可動プレート47とを主に備えて構成されている。
【0025】
ナックル43は、車輪2を操舵可能に支持するものであり、図2に示すように、上端(図2上側)がストラット41に連結されると共に、下端(図2下側)がボールジョイントを介してロアアーム42に連結されている。RRモータ44RRは、可動プレート47に揺動駆動のための駆動力を付与するものであり、DCモータにより構成され、その出力軸44aにはウォーム(図示せず)が形成されている。ウォームホイール45は、RRモータ44RRの駆動力をアーム46に伝達するものであり、RRモータ44RRの出力軸44aに形成されたウォームに噛み合い、かかるウォームと共に食い違い軸歯車対を構成している。
【0026】
アーム46は、ウォームホイール45から伝達されるRRモータ44RRの駆動力を可動プレート47に伝達するものであり、図2に示すように、一端(図2右側)が第1連結軸48を介してウォームホイール45の回転軸45aから偏心した位置に連結される一方、他端(図2左側)が第2連結軸49を介して可動プレート47の上端(図2上側)に連結されている。可動プレート47は、車輪2を回転可能に支持するものであり、上述したように、上端(図2上側)がアーム46に連結される一方、下端(図2下側)がキャンバ軸50を介してナックル43に揺動可能に軸支されている。
【0027】
上述したように構成される懸架装置4によれば、RRモータ44RRが駆動されると、ウォームホイール45が回転すると共に、ウォームホイール45の回転運動がアーム46の直線運動に変換される。その結果、アーム46が直線運動することで、可動プレート47がキャンバ軸50を揺動軸として揺動駆動され、車輪2のキャンバ角が調整される。
【0028】
なお、本実施の形態では、各連結軸48,49及びウォームホイール45の回転軸45aが、車体フレームBFから車輪2に向かう方向(矢印R方向)において、第1連結軸48、回転軸45a、第2連結軸49の順に一直線上に並んで位置する第1キャンバ状態と、回転軸45a、第1連結軸48、第2連結軸49の順に一直線上に並んで位置する第2キャンバ状態(図2に示す状態)とのいずれか一方のキャンバ状態となるように車輪2のキャンバ角が調整される。
【0029】
これにより、車輪2のキャンバ角が第1キャンバ状態若しくは第2キャンバ状態に調整された状態では、車輪2に外力が加わったとしても、アーム46を回動させる方向の力は発生せず、車輪2のキャンバ角を維持することができる。また、本実施の形態では、第1キャンバ状態において、車輪2のキャンバ角がマイナス方向の所定の角度(本実施の形態では−4.5°、以下「第1キャンバ角」と称す)に調整され、車輪2にネガティブキャンバが付与される。一方、第2キャンバ状態(図2に示す状態)では、車輪2のキャンバ角が第1キャンバ角より絶対値が小さく、第1キャンバ角よりポジティブ方向の所定の角度(本実施の形態では−1.5°、以下「第2キャンバ角」と称す)の定常角に調整される。
【0030】
なお、懸架装置40は、左右の前輪2FL,2FRのキャンバ角を調整する機能が省略されている点(即ち、図2に示す懸架装置4において、RRモータ44RRによる伸縮機能が省略されている点)を除き、その他の構成は懸架装置4と同じ構成であるので、その説明を省略する。即ち、後輪2RL,2RRのキャンバ角は第1キャンバ角または第2キャンバ角に調整可能であるが、前輪2FL,2FRはキャンバ角の調整ができない構成とされている。
【0031】
図1に戻って説明する。操舵装置5は、運転者によるステアリング63の操作を左右の前輪2FL,2FRに伝えて操舵するための装置であり、いわゆるラック&ピニオン式のステアリングギヤとして構成されている。この操舵装置5によれば、運転者によるステアリング63の操作(回転)は、まず、ステアリングコラム51を介してユニバーサルジョイント52に伝達され、ユニバーサルジョイント52により角度を変えられつつステアリングボックス53のピニオン53aに回転運動として伝達される。そして、ピニオン53aに伝達された回転運動は、ラック53bの直線運動に変換され、ラック53bが直線運動することで、ラック53bの両端に接続されたタイロッド54が移動する。その結果、タイロッド54がナックル55を押し引きすることで、前輪2FL,2FR(車輪2)に所定の舵角が付与される。
【0032】
アクセルペダル61及びブレーキペダル62は、運転者により操作される操作部材であり、各ペダル61,62の操作状態(踏み込み量、踏み込み速度など)に応じて、車両1の走行速度や制動力が決定され、車輪駆動装置3が駆動制御される。ステアリング63は、運転者により操作される操作部材であり、その操作状態(ステア角、ステア角速度など)に応じて、操舵装置5により左右の前輪2FL,2FRが操舵される。
【0033】
車両用制御装置100は、上述したように構成される車両1の各部を制御するための装置であり、例えば、各ペダル61,62やステアリング63の操作状態に応じてキャンバ角調整装置44(図3参照)を作動制御する。
【0034】
次いで、図3を参照して、車両用制御装置100の詳細構成について説明する。図3は、車両用制御装置100の電気的構成を示したブロック図である。車両用制御装置100は、図3に示すように、CPU71、ROM72及びRAM73を備え、それらがバスライン74を介して入出力ポート75に接続されている。また、入出力ポート75には、車輪駆動装置3等の装置が接続されている。
【0035】
CPU71は、バスライン74により接続された各部を制御する演算装置である。ROM72は、CPU71により実行される制御プログラム(例えば、図6に図示されるフローチャートのプログラム)や固定値データ等を記憶する書き換え不能な不揮発性のメモリであり、図3に示すようにコーナリングパワー関数72a(図4(c)参照)が記憶されている。コーナリングパワー関数72aは、前輪2FL,2FR及び後輪2RL,2RRそれぞれの軸重Wf,Wrに対するコーナリングパワーKf,Krを示す関数である。
【0036】
RAM73は、制御プログラムの実行時に各種のデータを書き換え可能に記憶するためのメモリであり、図3に示すように、キャンバフラグ73aが設けられている。
【0037】
キャンバフラグ73aは、車輪2のキャンバ角が第1キャンバ角に調整された状態にあるか否かを示すフラグであり、後述するキャンバ角調整処理(図6参照)の実行時にオン又はオフに切り替えられる。CPU71は、このキャンバフラグ73aがオンである場合に、車輪2のキャンバ角が第1キャンバ角に調整された状態にあると判断する。
【0038】
車輪駆動装置3は、上述したように、左右の前輪2FL,2FR(図1参照)を回転駆動するための装置であり、それら左右の前輪2FL,2FRに回転駆動力を付与する電動モータ3aと、その電動モータ3aをCPU71からの指示に基づいて駆動制御する駆動制御回路(図示せず)とを主に備えている。但し、車輪駆動装置3は、電動モータ3aに限られず、他の駆動源を採用することは当然可能である。他の駆動源としては、例えば、油圧モータやエンジン等が例示される。
【0039】
キャンバ角調整装置44は、各車輪2のキャンバ角を調整するための装置であり、上述したように、各懸架装置4の可動プレート47(図2参照)に揺動のための駆動力をそれぞれ付与する合計2個のRLモータ、RRモータ44RL,44RRと、それら各モータ44RL,44RRをCPU71からの指示に基づいて駆動制御する駆動制御回路(図示せず)とを主に備えている。
【0040】
加速度センサ装置80は、車両1の加速度を検出すると共に、その検出結果をCPU71に出力するための装置であり、前後方向加速度センサ80a、左右方向加速度センサ80bと、それら各加速度センサ80a,80bの検出結果を処理してCPU71に出力する出力回路(図示せず)とを主に備えている。
【0041】
前後方向加速度センサ80aは、車両1(車体フレームBF)の前後方向(図1矢印F−B方向)の加速度、いわゆる前後加速度を検出するセンサであり、左右方向加速度センサ80bは、車両1(車体フレームBF)の左右方向(図1矢印L−R方向)の加速度、いわゆる横加速度を検出するセンサである。なお、本実施の形態では、これら各加速度センサ80a,80bが圧電素子を利用した圧電型センサとして構成されている。
【0042】
また、CPU71は、加速度センサ装置80から入力された各加速度センサ80a,810の検出結果(前後加速度、横加速度)を時間積分して、2方向(前後方向および左右方向)の速度をそれぞれ算出すると共に、それら2方向成分を合成することで、車両1の走行速度を取得することができる。
【0043】
ヨーレートセンサ装置81は、車両1のヨーレートを検出すると共に、その検出結果をCPU71に出力するための装置であり、車両1の重心を通る鉛直軸(図1矢印U−D方向軸)回りの車両1(車体フレームBF)の回転角速度を検出するヨーレートセンサ81aと、そのヨーレートセンサ81aの検出結果を処理してCPU71に出力する出力回路(図示せず)とを主に備えている。
【0044】
ナビゲーション装置82は、車両1の現在位置および車両1の進行先の道路情報を取得するための装置であり、GPS衛星から電波を受信して車両1の現在位置を取得する現在位置取得部(図示せず)と、道路情報が記憶された地図データを取得する地図データ取得部(図示せず)と、その地図データ取得部により取得した地図データ及び現在位置取得部により取得した車両1の現在位置に基づいて車両1の現在位置の道路情報(勾配情報)を取得する道路情報取得部(図示せず)と、その道路情報取得部により取得した車両1の現在位置の道路情報を処理してCPU71に出力する出力回路(図示せず)とを主に備えている。CPU71は、ナビゲーション装置82から入力された道路情報から路面の傾斜角度を取得し、そこから車両1の進行方向における路面の水平面に対する傾斜角度θを推定して取得する。
【0045】
サスストロークセンサ装置83は、各懸架装置4の伸縮量を検出すると共に、その検出結果をCPU71に出力するための装置であり、各懸架装置4の伸縮量をそれぞれ検出する合計4個のFL〜RRサスストロークセンサ83FL〜83RRと、それら各サスストロークセンサ83FL〜83RRの検出結果を処理してCPU71に出力する出力回路(図示せず)とを備えている。
【0046】
なお、本実施の形態では、各サスストロークセンサ83FL〜83RRがひずみゲージとして構成されており、これら各サスストロークセンサ83FL〜83RRは、各懸架装置4のショックアブソーバ(図示せず)にそれぞれ配設されている。
【0047】
CPU71は、サスストロークセンサ装置83から入力された各サスストロークセンサ83FL〜83RRの検出結果(伸縮量)に基づいて、各車輪2の接地荷重を取得する。即ち、車輪2の接地荷重と懸架装置4の伸縮量とは比例関係を有しているので、懸架装置4の伸縮量をXとし、懸架装置4の減衰定数をkとすると、車輪2の接地荷重Fは、F=kXとなる。
【0048】
接地荷重センサ装置84は、各車輪2の接地荷重を検出すると共に、その検出結果をCPU71に出力するための装置であり、各車輪2の接地荷重をそれぞれ検出する合計4個のFL〜RR接地荷重センサ84FL〜84RRと、それら各接地荷重センサ84FL〜84RRの検出結果を処理してCPU71に出力する出力回路(図示せず)とを備えている。
【0049】
なお、本実施の形態では、各接地荷重センサ84FL〜84RRがピエゾ抵抗型の荷重センサとして構成されており、これら各接地荷重センサ84FL〜84RRは、各懸架装置4のショックアブソーバ(図示せず)にそれぞれ配設されている。
【0050】
傾斜センサ装置85は、水平面に対する車両1の角度を検出すると共に、その検出結果をCPU71に出力するための装置であり、水平面に対する車両1の前後方向(図1矢印F−B方向)の角度を検出する傾斜センサ(図示せず)と、その傾斜センサの検出結果を処理してCPU71に出力する出力回路(図示せず)とを備えている。なお、本実施の形態では、静電容量型の傾斜センサとして構成されている。
【0051】
ハイトセンサ装置86は、車体フレームBFの高さ(車高)を検出すると共に、その検出結果をCPU71に出力するための装置であり、車体フレームBFに固定された各ハイトセンサ86FL〜86RRと、それら各ハイトセンサ86FL〜86RRの回転軸と各サスペンションアームとを連結するリンク機構(図示せず)と、それら各ハイトセンサ86FL〜86RRの検出結果を処理してCPU71に出力する出力回路(図示せず)とを備えている。ハイトセンサ装置86では、サスペンションアームの相対変位がリンク機構によって回転運動に変換され、各ハイトセンサ86FL〜86RRの回転軸に伝達されて、その回転軸の回転角として現れる。その回転角から車体フレームBFの高さ(車高)を検出することができる。
【0052】
また、CPU71は、ハイトセンサ装置86から入力された各ハイトセンサ86FL〜86RRの検出結果(回転角)に基づいて、各車輪2の接地荷重(輪荷重)を取得する。即ち、輪荷重とハイトセンサの回転角とは比例関係を有しているので、入力された回転角から輪荷重を取得することができる。
【0053】
回転速度センサ装置87は、車輪2(図1参照)の回転速度を検出すると共に、その検出結果をCPU71に出力するための装置であり、左前輪2FLを支持するドライブシャフト31(車軸)の回転速度を検出するFL回転速度センサ87FLと、右前輪2FRを支持するドライブシャフト31(車軸)の回転速度を検出するFR回転速度センサ87FRと、左後輪2RLを支持するシャフト(車軸)(図示せず)の回転速度を検出するRL回転速度センサ87RLと、右後輪2RRを支持するシャフト(車軸)(図示せず)の回転速度を検出するRR回転速度センサ87RRと、それら各回転速度センサ87FL〜87RRの検出結果を処理してCPU71に出力する出力回路(図示せず)とを備えている。
【0054】
CPU71は、回転速度センサ装置87から入力された検出結果(車軸の回転速度)に基づいて、車両1の動加速度成分(前後加速度から重力加速度成分を除いた加速度)を取得する。即ち、車両1の動加速度成分は、回転速度センサ装置87から入力される車軸の回転速度の時間微分値と、車輪2の外径とを乗じることにより算出される。
【0055】
アクセルペダルセンサ装置61aは、アクセルペダル61の操作量を検出すると共に、その検出結果をCPU71に出力するための装置であり、アクセルペダル61の踏み込み量を検出する角度センサ(図示せず)と、その角度センサの検出結果を処理してCPU71に出力する出力回路(図示せず)とを主に備えている。
【0056】
ブレーキペダルセンサ装置62aは、ブレーキペダル62の操作量を検出すると共に、その検出結果をCPU71に出力するための装置であり、ブレーキペダル62の踏み込み量を検出する角度センサ(図示せず)と、その角度センサの検出結果を処理してCPU71に出力する出力回路(図示せず)とを主に備えている。
【0057】
ステアリングセンサ装置63aは、図示しないステアリング軸の回転角(操舵角θ)を検出すると共に、その検出結果をCPU71に出力するための装置であり、ステアリング軸の回転角を検出する角度センサ(図示せず)と、その角度センサの検出結果を処理してCPU71に出力する出力回路(図示せず)とを主に備えている。
【0058】
なお、本実施の形態では、各角度センサが電気抵抗を利用した接触型のポテンショメータとして構成されている。また、CPU71は、各センサ装置61a,62a,63aから入力された各角度センサの検出結果(操作量)を時間微分して、各ペダル61,62の踏み込み速度および操舵角θの時間微分値(操舵角速度)を取得することができる。
【0059】
図3に示す他の入出力装置90としては、例えば、ロール角センサ装置、舵角比可変操舵装置が例示される。ロール角センサ装置は、車両1のロール角を検出すると共に、その検出結果をCPU71に出力するための装置であり、車両1の重心を通る前後軸(図1矢印F−B方向軸)回りの車両1(車体フレームBF)の回転角を検出するロール角センサと、そのロール角センサの検出結果を処理してCPU71に出力する出力回路とを主に備えている。舵角比可変操舵装置は、車両1の走行速度に応じてステアリングギヤ比を演算し、このステアリングギヤ比に基づいて前輪2FL,2FRを転舵させる装置である。舵角比可変操舵装置は、特開平6−227422号公報、特開平9−58507号公報等に公知であるので、その説明は省略する。
【0060】
次に、本発明による旋回特性(ステア特性)の制御の原理について説明する。まず、図4を参照して、スタビリティファクタの演算方法の一例について説明する。スタビリティファクタは車両1の旋回特性(ステア特性)を示す値であり、以下の式(1)により演算できる。
【0061】
【数1】

【0062】
但し、Aはスタビリティファクタ、mは車両1の質量、lfは前軸と重心Gとの距離、lrは後軸と重心Gとの距離、Lは車両のホイールベース(L=lf+lr)、Kfは前輪のコーナリングパワー、Krは後輪のコーナリングパワーである。A>0のときは車両1の旋回特性がアンダーステアであることを示し、A<0のときはオーバーステアであることを示す。
【0063】
以下、車両1の傾斜角度θの検出結果から軸重Wf,Wrを演算し、軸重Wf,Wrに基づいて車輪2のコーナリングパワーKf,Krを演算した後、スタビリティファクタAを演算する方法について説明する。図4(a)は車両1の傾斜角度θの検出方法を説明する模式図であり、図4(b)は軸重Wf,Wrの検出方法を説明する模式図であり、図4(c)は後輪2RL,2RRのコーナリングパワー関数の内容を模式的に示す模式図である。なお、車両1の傾斜角度θの符号は、車両1が降坂路を走行しており路面が車両1からみて下り坂の場合を負、車両1が登坂路を走行しており路面が車両1からみて上り坂の場合を正とする。なお、路面の傾斜角度θは、その路面を走行する車両1の傾斜角度θと近似できる。
【0064】
図4(a)に示すように車両1が坂道を走行しているときは、前後方向加速度センサ80aが検出する前後加速度は、路面の傾斜による加速度(重力加速度成分)と車両1の駆動力や制動力による加速度(動加速度成分)とが合成される。ここで、重力加速度成分は、図4(a)に示すように、路面の傾斜角度θのときg・sinθ(但しgは重力加速度)である。また、動加速度成分は、回転速度センサ装置87により検出される車軸の回転速度の時間微分値と、車輪2の外径とを乗じることにより算出される。よって、重力加速度成分(g・sinθ)は、前後方向加速度センサ80aが検出する前後加速度から動加速度成分を減じることにより算出することができ、算出された重力加速度成分から路面の傾斜角度θ[rad]、即ち、車両1の進行方向において水平面に対する車両1の傾斜角度θを算出できる。
【0065】
また、車両1の質量mは、車両1の加速度および駆動力に基づいて、例えば特開2004−301576号公報、特開2002−340660号公報などに開示される既知の方法により算出できる。算出された質量mに重力加速度gを乗じて荷重Wが算出される。
【0066】
図4(b)に示すように、荷重Wは、前輪2FL,2FRの軸重Wf及び後輪2RL,2RRの軸重Wrに分配される(W=Wf+Wr)。分配された軸重Wfは以下の式(2)により求められ、軸重Wrは式(3)により求められる。
【0067】
【数2】
【0068】
但し、hは車両1の重心Gの高さ、aは車両1の前後加速度の動加速度成分、lfは前軸と重心Gとの距離、lrは後軸と重心Gとの距離、Lは車両のホイールベース(L=lf+lr)である。
【0069】
図4(c)に示すように、後輪2RL,2RRのコーナリングパワーKrは、後輪2RL,2RRの軸重Wrに対して正の傾きをもつ関数として表される。前輪2FL,2FRのコーナリングパワーKfも、図4(c)と同様に、前輪2FL,2FRの軸重Wfに対して正の傾きをもつ関数として表されるので、図示は省略する。また、図4(c)はコーナリングパワー関数が非線形の例を模式的に示したが、コーナリングパワー関数が線形となる場合もある。コーナリングパワーKf,Krは、軸重Wf,Wr及びタイヤの接地面積等の条件によって変動するので、タイヤの接地面積等の条件毎に軸重Wf,Wrに対する関数を設けておき、該当する関数に軸重Wf,Wrを代入することで算出できる。算出されたコーナリングパワーKf,Kr,質量m及び車両1により定まるホイールベースL,lf,lrを式(1)に代入することにより、スタビリティファクタAが求められる。
【0070】
なお、式(2)及び式(3)において、車両1の前後加速度の動加速度成分a=0、車両1の傾斜角度θ=0として軸重Wf,Wrを求め、その軸重Wf,Wr,ホイールベースL,lf,lrを式(1)に代入して得られる値を基準スタビリティファクタArとする。本実施の形態では、基準スタビリティファクタArは、車両1が水平面(平坦路)を一定の速度で走行するときのスタビリティファクタである。基準スタビリティファクタArは、標準タイヤや標準的な路面の摩擦係数等に基づいて車両毎に予め一定値を定めることができ、ROM72(図3参照)に記憶されている。
【0071】
次に、図5を参照して、車両1の傾斜角度θとスタビリティファクタとの関係について説明し、後輪2RL,2RRのキャンバ角とスタビリティファクタとの関係について説明する。図5(a)は車両1の傾斜角度θ(横軸)とスタビリティファクタ(縦軸)との関係を示す模式図であり、(b)は後輪2RL,2RRのキャンバ角(横軸)とスタビリティファクタ(縦軸)との関係を示す模式図である。なお、図5(a)において、車両1の傾斜角度θの符号は、車両1が降坂路を走行しており路面が車両1からみて下り坂(down)の場合を負、車両1が登坂路を走行しており路面が車両1からみて上り坂(up)の場合を正、路面が水平の場合を0とする。また、図5(b)において、車輪2のキャンバ角は、ネガティブキャンバの場合を負(図5左方向)、ポジティブキャンバの場合を正(図5右方向)とする。
【0072】
図5(a)に示すように、スタビリティファクタAは、車両1の傾斜角度θに対して正の傾きをもつ(傾斜角度θが小さくなるとスタビリティファクタが小さくなる)。即ち、車両1のスタビリティファクタAは、降坂路では小さくなり登坂路では大きくなる。これは、坂道におかれた車両1は傾斜角度θが小さくなる(下り勾配が大きくなる)につれ、荷重が前方に移動し軸重Wfが大きくなると共に軸重Wrが小さくなることによる。これに伴い、コーナリングパワーKfが大きくなると共にコーナリングパワーKrが小さくなる(図4(c)参照)。スタビリティファクタは式(1)で算出されるところ、コーナリングパワーKfが大きくなると共にコーナリングパワーKrが小さくなれば、スタビリティファクタAが小さくなる。
【0073】
前述したようにスタビリティファクタA>0のときは車両1の旋回特性がアンダーステアであることを示し、A<0のときはオーバーステアであることを示す。本実施の形態では、図5(a)に示すように、車両1は基準スタビリティファクタAr>0(アンダーステア)に設定されているが、傾斜角度θ<0のときは(下り坂を走行するときは)、スタビリティファクタAが小さくなり車両1の特性がオーバーステア傾向に変化する。
【0074】
本発明者らは、車輪2のキャンバ角を調整することでスタビリティファクタを大きくできる(車両1の旋回特性をアンダーステア傾向に変えられる)ことを見出した。即ち、図5(b)に示すように、後輪2RL,2RRのキャンバ角をマイナス側(図5(b)左側)に調整する(後輪2RL,2RRにネガティブキャンバを付与する)ことで、スタビリティファクタAを増加できる。本発明者らが解析した条件のもとでは、後輪2RL,2RRのキャンバ角を0[deg]から−4[deg]に調整して後輪2RL,2RRにネガティブキャンバを付与することで、車両1のスタビリティファクタが約3×10−4[s2/m2]増加した。
【0075】
これを適用して、図5(a)に示すように、傾斜角度θ<0の路面(下り坂)を走行する車両1のスタビリティファクタがAeであるとすると、後輪2RL,2RRのキャンバ角をマイナス側に調整することで、スタビリティファクタAeを基準スタビリティファクタArに近づけることができる。これにより、車両1の旋回特性を制御できる。
【0076】
次に、図6を参照して、車両用制御装置100によるキャンバ角調整処理について説明する。この処理は、車両用制御装置100の電源が投入されている間、CPU71によって繰り返し(例えば、0.2秒間隔で)実行される処理であり、左右の後輪2RL,2RRのキャンバ角を調整する処理である。
【0077】
CPU71は、キャンバ角調整処理に関し、まず、車両1の前後加速度(動加速度成分+重力加速度成分)を取得し(S1)、取得した車両1の前後加速度から重力加速度成分(g・sinθ)を分離する。次いで、分離された重力加速度成分から車両1の進行方向における水平面に対する車両1の傾斜角度θを取得する(S2)。次にCPU71は、式(2)及び式(3)に基づいて前輪2FL,2FR及び後輪2RL,2RRの軸重Wf,Wrを取得する(S3)。次いで、ROM72に予め記憶されたコーナリングパワー関数72a(図4(c)参照)により軸重Wf,Wrに基づきコーナリングパワーKf,Krを取得し(S4)、式(1)に基づいてスタビリティファクタを演算する(S5)。次に、演算された現在のスタビリティファクタと、ROM72に予め記憶された基準スタビリティファクタとを比較して、現在のスタビリティファクタが基準スタビリティファクタ以上であるか否かを判断する(S6)。
【0078】
その結果、現在のスタビリティファクタが基準スタビリティファクタ以上であると判断される場合には(S6:Yes)、次に、現在のスタビリティファクタが基準スタビリティファクタに対して所定値以上大きいか否かを判断する(S7)。S7の処理における所定値としては、後輪2RL,2RRのキャンバ角が第1キャンバ角(−4.5°)であるときのスタビリティファクタから、後輪2RL,2RRのキャンバ角が第2キャンバ角(−1.5°)であるときのスタビリティファクタを減じた値を採用することができる。
【0079】
S7の処理の結果、現在のスタビリティファクタが基準スタビリティファクタに対して所定値以上大きいと判断される場合には(S7:Yes)、キャンバフラグ73aがオンであるか否かを判断する(S8)。その結果、キャンバフラグ73aがオンであると判断される場合には(S8:Yes)、RL〜RRモータ44RL,44RRを作動させて、後輪2RL,2RRのキャンバ角を第2キャンバ角に調整し、後輪2RL,2RRへのネガティブキャンバの付与を解除すると共に(S9)、キャンバフラグ73aをオフして(S10)、このキャンバ角調整処理を終了する。
【0080】
即ち、現在のスタビリティファクタが基準スタビリティファクタに対して所定値以上大きいと判断される場合は(S7:Yes)、車両1の旋回特性は、基準スタビリティファクタの状態に対して十分なアンダーステア傾向にある。従って、後輪2RL,2RRへのネガティブキャンバの付与を解除することで、後輪2RL,2RRに生じるキャンバスラストを抑制して、操舵応答性を確保することができる。
【0081】
また、S8の処理の結果、キャンバフラグ73aがオフであると判断される場合には(S8:No)、後輪2RL,2RRのキャンバ角は既に第2キャンバ角に調整されているので、このキャンバ角調整処理を終了する。これにより、後輪2RL,2RRにキャンバスラストが生じることを抑制して操舵応答性を確保できると共に、車両1の旋回特性を十分なアンダーステア傾向に維持できる。
【0082】
これに対し、S7の処理の結果、現在のスタビリティファクタと基準スタビリティファクタとの差が所定値未満であると判断される場合には(S7:No)、このキャンバ角調整処理を終了する。即ちこの場合は、車両1の旋回特性は基準スタビリティファクタの状態に対してアンダーステア傾向にあるので、車両1は安定である。しかし、現在のスタビリティファクタと基準スタビリティファクタとの差が所定値未満であるので、後輪2RL,2RRのキャンバ角が第1キャンバ角から第2キャンバ角に調整されると、スタビリティファクタが基準スタビリティファクタより小さくなり、オーバーステア傾向になるおそれがある。また、後輪2RL,2RRのキャンバ角が第2キャンバ角から第1キャンバ角に調整されると、後輪2RL,2RRのキャンバスラストにより操舵応答性が低下するおそれがある。従って、後輪2RL,2RRのキャンバ角の調整を行うことなくキャンバ角調整処理を終了することにより、車両1の安定性を確保する。
【0083】
一方、S6の処理の結果、現在のスタビリティファクタが基準スタビリティファクタ以上でないと判断される場合には(S6:No)、次にキャンバフラグ73aがオンであるか否かを判断する(S11)。その結果、キャンバフラグ73aがオンでないと判断される場合には(S11:No)、RL〜RRモータ44RL,44RRを作動させて、後輪2RL,2RRのキャンバ角を第1キャンバ角に調整し、後輪2RL,2RRにネガティブキャンバを付与すると共に(S12)、キャンバフラグ73aをオンして(S13)、このキャンバ角調整処理を終了する。
【0084】
即ち、現在のスタビリティファクタが基準スタビリティファクタ以上でないと判断される場合は(S6:No)、車両1の旋回特性は基準スタビリティファクタの状態に対してオーバーステア傾向にある。この場合に後輪2RL,2RRのキャンバ角を第2キャンバ角(−1.5°)から第1キャンバ角(−4.5°)に調整することにより、アンダーステア傾向にすることができる。また、S11の処理の結果、キャンバフラグ73aがオンであると判断される場合には(S11:Yes)、後輪2RL,2RRのキャンバ角は既に第1キャンバ角に調整されているので、S12及びS13の処理をスキップして、このキャンバ角調整処理を終了する。
【0085】
以上説明したように第1実施の形態によれば、車両1の旋回特性を表すスタビリティファクタが演算され、そのスタビリティファクタと基準スタビリティファクタとが比較される。その比較結果に基づいて車輪2のキャンバ角が調整されるので、車両1の旋回特性を制御できる。また、現在のスタビリティファクタと基準スタビリティファクタとの偏差が小さくなるように車輪2のキャンバ角が調整されるので、車両1の旋回特性を、基準スタビリティファクタを定めた車両1の旋回特性に近づけることができる。これにより、車両1の旋回特性を安定化できる。また、現在のスタビリティファクタが基準スタビリティファクタより小さいと判断される場合に、スタビリティファクタを大きくするように車輪2のキャンバ角が調整されるので、車両1をアンダーステア傾向に制御できる。
【0086】
また、第1実施の形態では、キャンバ角調整装置44により後輪2RL,2RRのキャンバ角が調整され、後輪2RL,2RRにネガティブキャンバが付与される。下り坂を走行する車両1では、後輪2RL,2RRの軸重Wr(図4参照)が前輪2FL,2FRの軸重Wfに比べて小さくなるので、後輪2RL,2RRのキャンバ角が第1キャンバ角に調整されて接地面積が減ることによる後輪2RL,2RRの偏磨耗を抑制できる。さらに、後輪2RL,2RRにネガティブキャンバが付与されることにより、後輪2RL,2RRに発生するキャンバスラストを利用して車両1の特性を安定したアンダーステア傾向にすることができ、車両の旋回安定性を向上できる。
【0087】
なお、図6に示すフローチャート(キャンバ角調整処理)において、請求項1記載の状態量取得手段としてはS1〜S3の処理が、スタビリティファクタ演算手段としてはS5の処理が、比較手段としてはS6及びS7の処理が、第1キャンバ角調整手段としてはS9及びS12の処理がそれぞれ該当する。請求項6記載の輪荷重情報取得手段としてはS3の処理が該当する。
【0088】
次いで、図7を参照して、第2実施の形態について説明する。第1実施の形態では、取得した軸重に基づいてスタビリティファクタを演算する場合について説明した。これに対し第2実施の形態では、車両1の走行速度、ステアリングギヤ比およびヨーレートを取得し、それらに基づいてスタビリティファクタを演算する場合について説明する。なお、第2実施の形態は、第1実施の形態で説明した車両1に搭載される車両用制御装置100で実行されるものとする。なお、第1実施の形態と同一の部分については、同一の符号を付してその説明を省略する。
【0089】
次に、図7を参照して、車両用制御装置100によるキャンバ角調整処理について説明する。この処理は、車両用制御装置100の電源が投入されている間、CPU71によって繰り返し(例えば、0.2秒間隔で)実行される処理であり、左右の後輪2RL,2RRのキャンバ角を調整する処理である。なお、図7に図示されるフローチャートのプログラムは、車両用制御装置100のROM72に記憶されている。
【0090】
キャンバ角調整処理に関し、CPU71は、車両1の走行速度、ステアリングギヤ比およびヨーレートを取得する(S21〜S23)。次いで、以下の式(4)に基づいてスタビリティファクタを演算する(S5)。なお、ステアリングギヤ比は、車両1の走行速度に応じて舵角比可変操舵装置(図3に示す他の入出力装置90)により演算されるので、CPU71は、舵角比可変操舵装置による演算結果を取得する。
【0091】
【数3】
【0092】
但し、Aはスタビリティファクタ、Vは車両の走行速度、εは車両1のトウ角、Nはステアリングギヤ比、γはヨーレート、Lは車両1のホイールベースである。なお、S6〜S13の処理は第1実施の形態と同一の処理なので説明を省略する。以上説明したように第2実施の形態によれば、スタビリティファクタを演算するために取得する状態量の数を少なくすることができ、簡易にスタビリティファクタを演算できる。
【0093】
次いで、図8〜図11を参照して、第3実施の形態について説明する。第1実施の形態および第2実施の形態では、スタビリティファクタと基準スタビリティファクタとを比較して、その比較結果に基づいて後輪2RL,2RRのキャンバ角を調整する場合について説明した。これに対し第3実施の形態では、スタビリティファクタに基づいて後輪2RL,2RRのキャンバ角を調整する閾値を変更する場合について説明する。なお、第3実施の形態の処理が行われる車両用制御装置110は、第1実施の形態で説明した車両1に搭載されるものとする。なお、第1実施の形態と同一の部分については、同一の符号を付してその説明を省略する。
【0094】
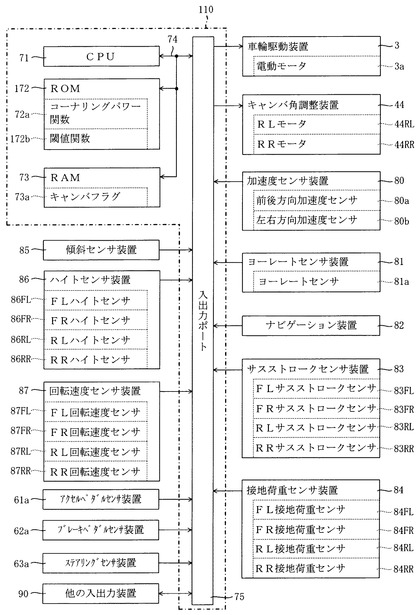
図8を参照して、車両用制御装置110の詳細構成について説明する。図8は車両用制御装置110の電気的構成を示したブロック図である。車両用制御装置110は、図8に示すように、CPU71、ROM172及びRAM73を備え、それらがバスライン74を介して入出力ポート75に接続されている。ROM172は、CPU71により実行される制御プログラム(例えば、図10及び図11に図示されるフローチャートのプログラム)や固定値データ等を記憶する書き換え不能な不揮発性のメモリであり、図8に示すようにコーナリングパワー関数72a(図4(c)参照)及び閾値関数172bが記憶されている。RAM73は、制御プログラムの実行時に各種のデータを書き換え可能に記憶するためのメモリであり、ROM172に記憶された閾値関数172bに基づいて設定された閾値が記憶されている。
【0095】
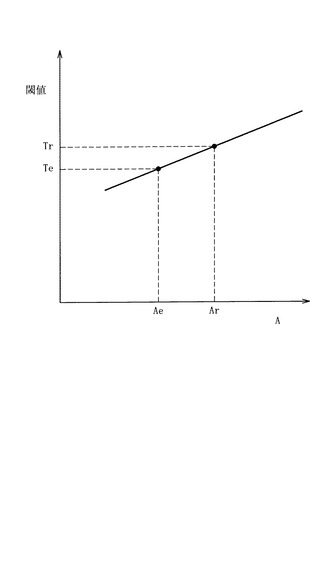
ここで、図9を参照して、閾値関数172aについて説明する。図4は閾値関数172aの内容を模式的に示した模式図である。閾値関数172bは、スタビリティファクタと各状態量における閾値との関係を示す線形または非線形の関数である。閾値は、車両1の操舵角や横加速度等の状態量が所定の条件を満たすかの判断のための基準値である。この基準値は、例えば、車輪2のキャンバ角が第2キャンバ角の状態で車両1が加速、制動または旋回をする場合に、車輪2がスリップするおそれがあると判断される限界値であり、車両1が加速、制動または旋回をするときに現れる状態量ごとに定められている。閾値関数172aも状態量ごとに定められている。CPU71は、閾値関数172aの内容に基づいて、車両1のスタビリティファクタAeにおける閾値Teを状態量ごとに設定する。なお、初期設定されている閾値は、基準スタビリティファクタArにおける閾値Trである。
【0096】
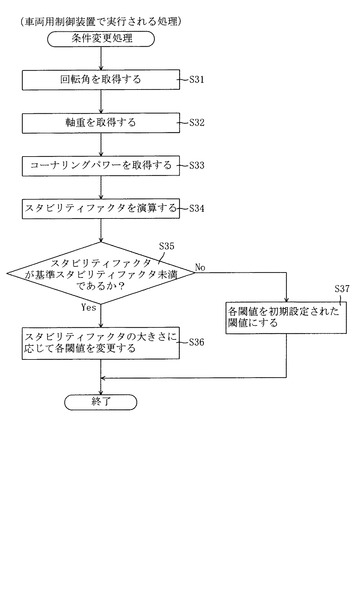
次いで、図10を参照して条件変更処理について説明する。図10は条件変更処理を示すフローチャートである。この処理は、車両用制御装置110の電源が投入されている間、CPU71によって繰り返し(例えば、0.2秒間隔で)実行される処理であり、各閾値を変更する処理である。
【0097】
CPU71は、条件変更処理に関し、まずハイトセンサ装置86により検出される回転角を取得する(S31)。CPU71は、ハイトセンサ装置86から入力される回転角に基づき、回転角と比例関係にある車輪2の接地荷重(輪荷重)を演算し、前輪2FL,2FR及び後輪2RL,2RRの軸重Wf,Wrを取得する(S32)。次いで、ROM72に予め記憶されたコーナリングパワー関数72a(図4(c)参照)により軸重Wf,Wrに基づきコーナリングパワーKf,Krを取得し(S33)、式(1)に基づいてスタビリティファクタを演算する(S34)。
【0098】
次に、演算された現在のスタビリティファクタと、ROM72に予め記憶された基準スタビリティファクタとを比較して、現在のスタビリティファクタが基準スタビリティファクタ未満であるか否かを判断する(S35)。その結果、スタビリティファクタが基準スタビリティファクタ未満であると判断される場合には(S35:Yes)、ROM72に記憶された閾値関数172b(図9参照)に基づき、スタビリティファクタの大きさに応じて各閾値を変更し(S36)、変更された閾値をRAM73に記憶して、この条件変更処理を終了する。
【0099】
即ち、現在のスタビリティファクタが基準スタビリティファクタ未満であると判断される場合は(S35:Yes)、車両1の旋回特性は基準スタビリティファクタの状態に対してオーバーステア傾向にある。この場合に、後輪2RL,2RRのキャンバ角が第1キャンバ角に調整されてネガティブキャンバが付与され易くなるように各閾値を変更して、第1キャンバ角に調整される条件を緩和することで、車両1の旋回特性をアンダーステア傾向に変更し易くできる。
【0100】
これに対し、スタビリティファクタが基準スタビリティファクタ未満でないと判断される場合には(S35:No)、RAM73に記憶された各閾値を初期設定された閾値(図9に示す閾値Tr)にして(S37)、この条件変更処理を終了する。
【0101】
即ち、現在のスタビリティファクタが基準スタビリティファクタ未満でないと判断される場合は(S35:No)、車両1の旋回特性は基準スタビリティファクタの状態に対してアンダーステア傾向にある。この場合は、車輪2のキャンバ角が第1キャンバ角に調整されてネガティブキャンバが付与される条件を初期設定の条件にすることで、後輪2RL,2RRのキャンバ角を第1キャンバ角に調整され難くして、車輪2にキャンバスラストが生じることを抑制できる。これにより、車輪2の偏磨耗を抑制できると共に、操舵応答性を確保できる。
【0102】
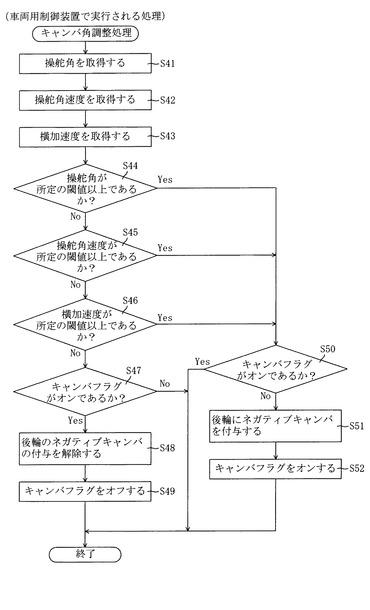
次いで、図11を参照してキャンバ角調整処理について説明する。図11はキャンバ角調整処理を示すフローチャートである。この処理は、車両用制御装置110の電源が投入されている間、CPU71によって繰り返し(例えば、0.2秒間隔で)実行される処理であり、左右の後輪2RL,2RRのキャンバ角を調整する処理である。
【0103】
CPU71は、キャンバ角調整処理に関し、まず、ステアリング63の操作量(操舵角)、操舵角速度(操舵角の時間微分値)及び横加速度をそれぞれ取得し(S41,S42,S43)、取得した操舵角がRAM73に記憶された所定の閾値以上であるか否かを判断する(S44)。操舵角が所定の閾値以上でないと判断される場合には(S44:No)、次に、取得した操舵角速度がRAM73に記憶された所定の閾値以上であるか否かを判断する(S45)。操舵角速度が所定の閾値以上でないと判断される場合には(S45:No)、次に、取得した横加速度がRAM73に記憶された所定の閾値以上であるか否かを判断する(S46)。横加速度が所定の閾値以上でないと判断される場合には(S46:No)、キャンバフラグ73aがオンであるか否かを判断する(S47)。
【0104】
その結果、キャンバフラグ73aがオンであると判断される場合には(S47:Yes)、RL〜RRモータ44RL,44RRを作動させて、後輪2RL,2RRのキャンバ角を第2キャンバ角に調整し、後輪2RL,2RRのネガティブキャンバの付与を解除すると共に(S48)、キャンバフラグ73aをオフして(S49)、このキャンバ角調整処理を終了する。
【0105】
これに対し、S47の処理の結果、キャンバフラグ73aがオフであると判断される場合には(S47:No)、後輪2RL,2RRのキャンバ角は既に第2キャンバ角に調整されているので、S48及びS49の処理をスキップして、このキャンバ角調整処理を終了する。
【0106】
一方、S44,S45及びS46の処理の結果、操舵角、操舵角速度および横加速度のいずれかが所定の閾値以上であると判断される場合には(S44:Yes,S44:Yes又はS45:Yes)、キャンバフラグ73aがオンであるか否かを判断する(S50)。その結果、キャンバフラグ73aがオフであると判断される場合には(S50:No)、RL〜RRモータ44RL,44RRを作動させて、後輪2RL,2RRのキャンバ角を第1キャンバ角に調整し、後輪2RL,2RRにネガティブキャンバを付与すると共に(S51)、キャンバフラグ73aをオンして(S52)、このキャンバ角調整処理を終了する。
【0107】
これに対し、S50の処理の結果、キャンバフラグ73aがオンであると判断される場合には(S50:Yes)、後輪2RL,2RRのキャンバ角は既に第1キャンバ角に調整されているので、S51及びS52の処理をスキップして、このキャンバ角調整処理を終了する。
【0108】
これにより、車両1の状態量が所定の条件を満たす場合、即ち、ステアリング63の操作による操舵角、操舵角速度および車両1の横加速度の内の少なくとも1の状態量が所定の閾値以上であり、車輪2のキャンバ角が第2キャンバ角の状態で車両1が旋回をすると車輪2がスリップするおそれがあると判断される場合には、車輪2にネガティブキャンバを付与することで、車輪2に発生するキャンバスラストを利用して、車両1の走行安定性を確保することができる。
【0109】
なお、本実施の形態によれば、スタビリティファクタに基づいて閾値が変更されるので、車輪2のキャンバ角の調整により車両1の旋回特性を制御できる。また、本実施の形態によれば、スタビリティファクタAe(図9参照)と基準スタビリティファクタArとが比較され、スタビリティファクタAeが基準スタビリティファクタAr未満であると判断される場合に、閾値が変更される。閾値は、車輪2のキャンバ角が第1キャンバ角に調整される条件を緩和するように変更されるので、車両1の旋回特性をアンダーステア傾向に制御し易くできる。
【0110】
なお、図10に示すフローチャート(条件変更処理)及び図11に示すフローチャート(キャンバ角調整処理)において、請求項4記載の状態量取得手段としてはS31,S32(図10参照),S41,S42,S43(図11参照)の処理が、状態量判断手段としてはS44,S45,S46(図11参照)の処理が、第2キャンバ角調整手段としてはS48,S51(図11参照)の処理が、スタビリティファクタ演算手段としてはS34(図10参照)の処理が、第1条件変更手段としてはS36,S37(図10参照)の処理がそれぞれ該当する。請求項5記載の比較手段としてはS35(図10参照)の処理が、請求項6記載の輪荷重情報取得手段としてはS32(図10参照)の処理がそれぞれ該当する。
【0111】
次いで、図12〜図14を参照して第4実施の形態について説明する。第1実施の形態〜第3実施の形態では、キャンバ角調整装置44により後輪2RL,2RRのキャンバ角が調整される場合について説明した。これに対し、第4実施の形態では、キャンバ角調整装置により前輪2FL,2FRのキャンバ角が調整される場合について説明する。
【0112】
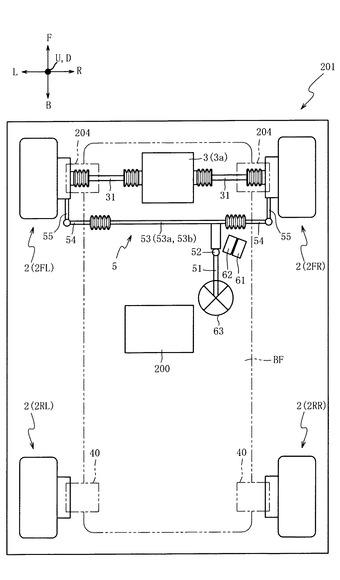
図12は、第4実施の形態における車両用制御装置200が搭載される車両201を模式的に示した模式図である。なお、図12の矢印U−D,L−R,F−Bは、車両201の上下方向、左右方向、前後方向をそれぞれ示している。
【0113】
まず、車両201の概略構成について説明する。図12に示すように、車両201は、複数(本実施の形態では4輪)の車輪2を備えて構成されている。本実施の形態では、左右の前輪2FL,2FRが懸架装置204により車体フレームBFに懸架される一方、左右の後輪2RL,2RRが懸架装置40により車体フレームBFに懸架されている。なお、懸架装置40は左右の後輪2RL,2RRのキャンバ角を調整する機能が省略されている点(即ち、図2に示す懸架装置4において、RRモータ44RRによる伸縮機能が省略されている点)を除き、その他の構成は懸架装置4と同じ構成であるので、その説明を省略する。また、本実施の形態における懸架装置204は、車輪2のキャンバ角を調整するキャンバ角調整機構としての機能を兼ね備えている。
【0114】
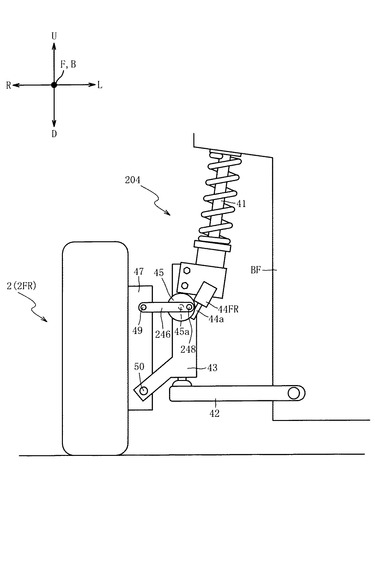
ここで、図13を参照して、懸架装置204の詳細構成について説明する。図13は、懸架装置204の正面図である。なお、ここでは、キャンバ角調整機構として機能する構成のみについて説明し、サスペンションとして機能する構成については周知の構成と同様であるので、その説明を省略する。また、各懸架装置204の構成は、左右の前輪2FL,2FRにおいてそれぞれ共通であるので、右の前輪2FRに対応する懸架装置204を代表例として図13に図示する。但し、図13では、理解を容易とするためにドライブシャフト31等の図示が省略されている。
【0115】
懸架装置204は、図13に示すように、ストラット41及びロアアーム42を介して車体フレームBFに支持されるナックル43と、駆動力を発生するFRモータ44FRと、そのFRモータ44FRの駆動力を伝達するウォームホイール45及びアーム246と、それらウォームホイール45及びアーム246から伝達されるFRモータ44FRの駆動力によりナックル43に対して揺動駆動される可動プレート47とを主に備えて構成されている。
【0116】
アーム246は、ウォームホイール45から伝達されるFRモータ44FRの駆動力を可動プレート47に伝達するものであり、図13に示すように、一端(図13右側)が第1連結軸248を介してウォームホイール45の回転軸45aから偏心した位置に連結される一方、他端(図13左側)が第2連結軸49を介して可動プレート47の上端(図13上側)に連結されている。
【0117】
上述したように構成される懸架装置204によれば、FRモータ44FRが駆動されると、ウォームホイール45が回転すると共に、ウォームホイール45の回転運動がアーム246の直線運動に変換される。その結果、アーム246が直線運動することで、可動プレート47がキャンバ軸50を揺動軸として揺動駆動され、車輪2のキャンバ角が調整される。
【0118】
なお、本実施の形態では、各連結軸248,49及びウォームホイール45の回転軸45aが、車体フレームBFから車輪2に向かう方向(矢印R方向)において、回転軸45a、第1連結軸248、第2連結軸49の順に一直線上に並んで位置する第1キャンバ状態と、第1連結軸248、回転軸45a、第2連結軸49の順に一直線上に並んで位置する第2キャンバ状態(図13に示す状態)とのいずれか一方のキャンバ状態となるように車輪2のキャンバ角が調整される。
【0119】
これにより、車輪2のキャンバ角が第1キャンバ状態若しくは第2キャンバ状態に調整された状態では、車輪2に外力が加わったとしても、アーム246を回動させる方向の力は発生せず、車輪2のキャンバ角を維持することができる。また、本実施の形態では、第1キャンバ状態において、車輪2のキャンバ角がプラス方向の所定の角度(本実施の形態では+2.5°、以下「第1キャンバ角」と称す)に調整され、車輪2にポジティブキャンバが付与される。一方、第2キャンバ状態(図13に示す状態)では、車輪2のキャンバ角が第1キャンバ角より絶対値が小さく、第1キャンバ角よりネガティブ方向の所定の角度(本実施の形態では−1.5°、以下「第2キャンバ角」と称す)の定常角に調整される。
【0120】
なお、懸架装置40は、左右の後輪2RL,2RRのキャンバ角を調整する機能が省略されている(即ち、図2に示す懸架装置4において、RRモータ44RRによる伸縮機能が省略されている)ので、後輪2RL,2RRはキャンバ角の調整ができない構成とされている。
【0121】
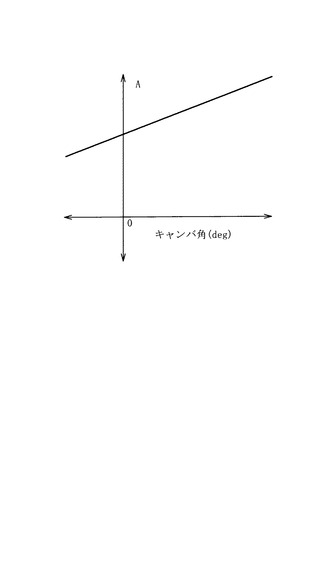
次に、図14を参照して、前輪2FL,2FRのキャンバ角とスタビリティファクタとの関係を説明する。図14は、前輪2FL,2FRのキャンバ角とスタビリティファクタAとの関係を示す模式図である。図14に示すように、前輪2FL,2FRのキャンバ角をプラス側(図14右側)に調整する(前輪2FL,2FRにポジティブキャンバを付与する)ことで、スタビリティファクタAを増加できる。前輪2FL,2FRのキャンバ角をプラス側に調整することでスタビリティファクタAを増加させ、車両201の旋回特性をアンダーステア傾向にできるので、後輪2RL,2RRのキャンバ角をマイナス側に調整する第1実施の形態〜第3実施の形態と同様の効果を奏することができる。
【0122】
次いで、図15及び図16を参照して、第5実施の形態について説明する。第3実施の形態では、スタビリティファクタに基づいて後輪2RL,2RRのキャンバ角を調整する閾値を変更する場合について説明した。これに対し第5実施の形態では、車両の傾斜角度に基づいて後輪2RL,2RRのキャンバ角を調整する閾値を変更する場合について説明する。なお、第5実施の形態の処理が行われる車両用制御装置110(図8参照)は、第1実施の形態で説明した車両1に搭載されるものとする。なお、第1実施の形態と同一の部分については、同一の符号を付してその説明を省略する。
【0123】
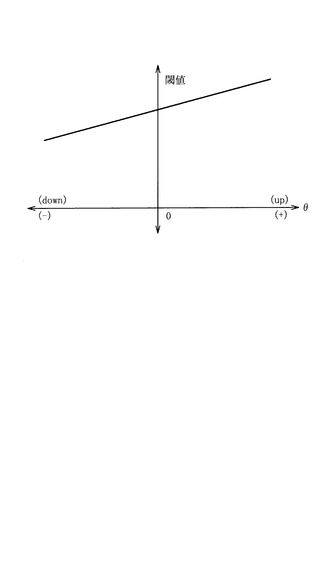
図15を参照して、車両用制御装置110(図8参照)に記憶される閾値関数について説明する。図15は、車両用制御装置110に記憶される閾値関数の内容を模式的に示す模式図である。図15において、横軸は車両1の傾斜角度θを示し、縦軸は閾値を示している。車両1の傾斜角度θの符号は、車両1が降坂路を走行しており路面が車両1からみて下り坂(down)の場合を負、車両1が登坂路を走行しており路面が車両1からみて上り坂(up)の場合を正、路面が水平の場合を0とする。なお、以下説明する閾値関数は、第3実施の形態で説明した閾値関数172b(図8参照)に代えて、ROM172に記憶されている。
【0124】
図15に示す閾値関数は、車両1の傾斜角度θと各状態量における閾値との関係を示す線形または非線形の関数である。閾値は、車両1の操舵角や横加速度等の状態量が所定の条件を満たすかの判断のための基準値である。この基準値は、例えば、車輪2のキャンバ角が第2キャンバ角の状態で車両1が加速、制動または旋回をする場合に、車輪2がスリップするおそれがあると判断される限界値であり、車両1が加速、制動または旋回をするときに現れる状態量ごとに定められている。閾値関数も状態量ごとに定められている。CPU71は、閾値関数の内容に基づいて、車両1の傾斜角度θにおける閾値を状態量ごとに設定する。なお、初期設定されている閾値は、車両1の傾斜角度θ=0における閾値である。
【0125】
次いで、図16を参照して条件変更処理について説明する。図16は条件変更処理を示すフローチャートである。この処理は、車両用制御装置110の電源が投入されている間、CPU71によって繰り返し(例えば、0.2秒間隔で)実行される処理であり、各閾値を変更する処理である。
【0126】
CPU71は、条件変更処理に関し、まず、車両1の進行方向において水平面に対する車両1の傾斜角度θを取得する(S61)。なお、本実施の形態では、車両1の傾斜角度θは傾斜センサ装置85により検出される。CPU71は、傾斜センサ装置85から入力される車両1の傾斜角度θに基づき、ROM72に記憶された閾値関数(図15参照)に基づき、傾斜角度θに応じて各閾値を変更し(S62)、変更された閾値をRAM73に記憶して、この条件変更処理を終了する。
【0127】
即ち、車両1の旋回特性は、車両1の傾斜角度θが負の場合(降坂路を走行の場合)、車両1が水平面を走行する状態に対してオーバーステア傾向にあり、車両1の傾斜角度θが正の場合(登坂路を走行の場合)、車両1が水平面を走行する状態に対してアンダーステア傾向にある(図5(a)参照)。車両1の傾斜角度θが負の場合、後輪2RL,2RRのキャンバ角が第1キャンバ角に調整されてネガティブキャンバが付与され易くなるように各閾値を変更して、第1キャンバ角に調整される条件を緩和することで、車両1の旋回特性をアンダーステア傾向に変更し易くできる。
【0128】
これに対し、車両1の傾斜角度θが正の場合、車両1はアンダーステア傾向にあるので、後輪2RL,2RRのキャンバ角が第1キャンバ角に調整され難くなるように各閾値を変更して、車輪2にキャンバスラストが生じることを抑制できる。これにより、車輪2の偏磨耗を抑制できると共に、操舵応答性を確保できる。
【0129】
なお、第5実施の形態におけるキャンバ角調整処理は、第3実施の形態で説明した処理(図11参照)と同様なので説明を省略する。本実施の形態によれば、車両1の傾斜角度θに基づいて閾値が変更されるので、車輪2のキャンバ角の調整により車両1の旋回特性を制御できる。
【0130】
また、説明を省略したが、車両1の傾斜角度θが負の場合には(車両1が降坂路を走行するものに相当すると判断される場合には)、閾値関数に基づいて閾値が変更されるが、車両1の傾斜角度θが正の場合には(車両1が登坂路を走行するものに相当すると判断される場合には)、初期設定されている閾値(車両1の傾斜角度θ=0における閾値)に閾値を戻すようにすることも可能である。この場合も、車両1が降坂路を走行するときは車両1がオーバーステア傾向になる可能性が高くなるところ、車両1の傾斜角度θが、車両1が降坂路を走行するものに相当すると判断される場合に車輪2のキャンバ角が調整される条件が変更されるので、車輪2のキャンバ角の調整により車両1をアンダーステア傾向にすることができる。さらに、車両1が登坂路を走行するものに相当すると判断される場合に、車輪2のキャンバ角が調整される条件が初期設定されている条件に戻されるため、車両1の操舵応答性を確保できる。
【0131】
なお、図16に示すフローチャート(条件変更処理)及び図11に示すフローチャート(キャンバ角調整処理)において、請求項8記載の状態量取得手段としてはS31,S32(図10参照),S41,S42,S43(図11参照)の処理が、状態量判断手段としてはS44,S45,S46(図11参照)の処理が、第2キャンバ角調整手段としてはS48,S51(図11参照)の処理が、傾斜角度取得手段としては、S61(図16参照)の処理が、第2条件変更手段としてはS62(図16参照)の処理がそれぞれ該当する。
【0132】
以上、実施の形態に基づき本発明を説明したが、本発明は上記実施の形態に何ら限定されるものではなく、本発明の趣旨を逸脱しない範囲内で種々の改良変形が可能であることは容易に推察できるものである。
【0133】
上記各実施の形態で挙げた数値は一例であり、他の数値を採用することは当然可能である。例えば、上記各実施の形態で説明した第1キャンバ角および第2キャンバ角の値は任意に設定することができる。
【0134】
上記各実施の形態では、後輪2RL,2RRのキャンバ角を調整可能に構成される車両1、前輪2FL,2FRのキャンバ角を調整可能に構成される車両201に車両用制御装置が搭載される場合について説明したが、必ずしもこれらに限られるものではなく、車両用制御装置は、前輪2FL,2FR及び後輪2RL,2RRの両方のキャンバ角を調整可能に構成される車両に搭載される場合もある。この場合は、各状態量の大きさや変化量に基づいて、状態量や変化量が小さな場合は後輪2RL,2RRにネガティブキャンバを付与し、状態量や変化量が大きな場合は前輪2FL,2FRにポジティブキャンバを付与すると共に、後輪2RL,2RRにネガティブキャンバを付与するようにすることが可能である。
【0135】
上記各実施の形態では、車両用制御装置100,200が適用される車両1,201が前輪駆動方式である場合について説明したが、これらに限定されるものでははく、後輪駆動方式の車両や4輪駆動方式の車両に適用することも可能である。
【0136】
上記各実施の形態では、車輪2のキャンバ角は、キャンバ角調整装置44により第1キャンバ角または第2キャンバ角に調整され、車両1,201が通常走行をするときは、車輪2が第2キャンバ角に設定される場合について説明した。即ち、車両1,201が通常走行をするときのキャンバ角の所定角と、第2キャンバ角とが同一の場合を説明したが、必ずしもこれに限られるものではない。懸架装置およびキャンバ角調整装置が、車輪2のキャンバ角を任意の角度に調整可能な場合は、車輪2のキャンバ角(第2キャンバ角)を第1キャンバ角よりも所定角(車両1,201が通常走行をするときのキャンバ角)に近い角度に調整することが可能である。この場合は、車両1,201が通常走行をするときのキャンバ角の所定角と、第2キャンバ角とは同一でないが、車輪2のキャンバ角が第2キャンバ角に調整されることで、キャンバスラストを減少させて操舵応答性を確保できる。また、懸架装置およびキャンバ角調整装置が、車輪2のキャンバ角を任意の角度に調整可能に構成される場合は、現在のスタビリティファクタが基準スタビリティファクタと一致するように、車輪2のキャンバ角を細かく制御することも可能である。
【0137】
上記第1実施の形態では、加速度センサ装置80から入力される前後加速度に基づいて車両1の傾斜角度θを取得する場合について説明したが、必ずしもこれに限られるものではなく、ナビゲーション装置82から入力される情報に基づいて車両1の傾斜角度を取得することが可能である。ナビゲーション装置82から入力される情報(路面の傾斜角度)に基づいて、路面の傾斜角度に基づいてその路面を走行する車両1の傾斜角度θを推定できるからである。また、第5実施の形態で説明したように、傾斜センサ装置85から入力される情報に基づいて車両1の傾斜角度θを取得することも可能である。
【0138】
また、上記第1実施の形態では、車両1の傾斜角度θに基づいて軸重Wf,Wrを取得する場合について説明したが、必ずしもこれに限られるものではなく、サスストロークセンサ装置83や接地荷重センサ装置84から入力される情報に基づいて、傾斜角度θを取得することなく軸重Wf,Wrを取得することも可能である。同様に第3実施の形態においても、ハイトセンサ装置86から入力される情報に代えて、サスストロークセンサ装置83や接地荷重センサ装置84から入力される情報に基づいて、軸重Wf,Wrを取得することが可能である。
【0139】
上記第3実施の形態および第5実施の形態では、ステアリング63による操舵角、操舵角速度および横加速度に基づいて、車両1の状態量が所定の条件を満たすか否かを判断する場合を説明したが、必ずしもこれに限られるものではなく、他の状態量に基づいて車両1の状態量が所定の条件を満たすか否かを判断することは当然可能である。他の状態量としては、例えば、アクセルペダル61の操作量、ブレーキペダル62の操作量や操作速度のように、運転者により操作される操作部材の状態を示すものでも良く、或いは、車両1自体の状態を示すものでも良い。車両1自体の状態を示すものとしては、車両1の前後加速度、ヨーレート、ロール角などが例示される。
【0140】
また、上記第3実施の形態および第5実施の形態では、車両1の状態量が所定の条件を満たすか否かを判断する状態量判断処理において、ステアリング63による操舵角、操舵角速度および横加速度が所定の閾値以上であるか否かを判断するための判断基準を、車輪2のキャンバ角が第2キャンバ角の状態で車両1が旋回する場合に、車輪2がスリップするおそれがあると判断される限界値とする場合を説明したが、必ずしもこれに限られるものではなく、例えば、単に車両1の状態量(例えば、各ペダル61,62の操作量やステアリング63の操作量など)に基づいて設定しても良い。
【0141】
上記各実施の形態では、前輪2FL,2FR及び後輪2RL,2RRの軸重Wf,Wrに基づいてスタビリティファクタを算出する場合について説明したが、必ずしもこれに限られるものではなく、サスストロークセンサ装置83、接地荷重センサ装置84、ハイトセンサ装置86から入力される情報に基づいて前輪2FL,2FR及び後輪2RL,2RRの輪荷重を各々求め、以下の式(5)に基づいてスタビリティファクタを算出することもできる。
【0142】
【数4】
【0143】
但し、Aはスタビリティファクタ、mは車両の質量、lfは前軸と重心Gとの距離、lrは後軸と重心Gとの距離、Lは車両のホイールベース(L=lf+lr)、KFRは右前輪のコーナリングパワー、KFLは左前輪のコーナリングパワー、KRRは右後輪のコーナリングパワー、KRLは左後輪のコーナリングパワーである。
【0144】
また、上記各実施の形態では、前輪2FL,2FR、後輪2RL,2RRについて左右の車輪2のキャンバ角を調整する場合について説明したが、必ずしもこれに限られるものではなく、車両1が旋回するときに前輪2FL,2FR、後輪2RL,2RRの旋回外輪のキャンバ角を調整するようにすることも可能である。
【0145】
上記各実施の形態では、演算されたスタビリティファクタとROM72に記憶された基準スタビリティファクタとを比較する場合について説明したが、必ずしもこれに限られるものではない。例えば、走行中の車両1,201のスタビリティファクタのうち、平坦路(水平面)を走行していると判断されるときのスタビリティファクタを基準スタビリティファクタとしてRAM73に記憶しておき、RAM73に記憶された基準スタビリティファクタと、走行中のスタビリティファクタとを比較することも可能である。これにより、異なる種類の車輪2に取り替えたり車輪2の空気圧等が変化したりしても、走行中の車両1,201にあわせた基準スタビリティファクタを設定できる。その結果、車両1,201の旋回特性に応じて車輪2のキャンバ角の調整を最適に行うことができる。
【0146】
上記各実施の形態においては、スタビリティファクタと基準スタビリティファクタとを比較して、スタビリティファクタが基準スタビリティファクタより小さいと判断される場合に、スタビリティファクタが大きくなるように車輪2のキャンバ角を制御する場合について説明したが、必ずしもこれに限られるものではない。スタビリティファクタと基準スタビリティファクタとを比較して、スタビリティファクタが基準スタビリティファクタより大きいと判断される場合に、スタビリティファクタが基準スタビリティファクタに近づくように(スタビリティファクタが小さくなるように)車輪2のキャンバ角を調整することも可能である。この場合は、車両1,201のアンダーステア傾向を弱めるように旋回特性を調整することができ、車両1,201の操舵応答性を確保できる。
【0147】
上記第3実施の形態および第5実施の形態では、スタビリティファクタAや傾斜角度θと各閾値との関係を規定した閾値関数に基づいて各閾値を求める場合について説明したが、必ずしもこれに限られるものではなく、スタビリティファクタAや傾斜角度θに対する各閾値を規定したマップに基づいて各閾値を求めるようにすることも可能である。
【符号の説明】
【0148】
100,110,200 車両用制御装置
1,201 車両
2 車輪
2FL,2FR 前輪
2RL,2RR 後輪
44 キャンバ角調整装置
44FL FLモータ(キャンバ角調整装置の一部)
44FR FRモータ(キャンバ角調整装置の一部)
44RL RLモータ(キャンバ角調整装置の一部)
44RR RRモータ(キャンバ角調整装置の一部)
BF 車体の一部
【技術分野】
【0001】
本発明は、車輪のキャンバ角を調整するキャンバ角調整装置を備えた車両に用いられる車両用制御装置に関し、特に、車両の旋回特性を制御できる車両用制御装置に関するものである。
【背景技術】
【0002】
従来より、車両の走行状態に応じて車輪のキャンバ角を調整することで、車両の走行安定性を確保する技術が知られている。この種の技術に関し、例えば特許文献1には、車両が所定の速度以上で走行するときにネガティブキャンバを車輪に付与することで、車両の走行安定性を向上させる技術が開示されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開昭60−193781号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述した特許文献1に開示される技術では、車両の走行速度を車輪のキャンバ角を調整するパラメータとしているが、車両の走行速度は車両の旋回特性の直接的なパラメータではないので、車輪のキャンバ角を調整することで車両の旋回特性を制御することができず、車輪のキャンバ角を調整することで逆に車両の旋回性が低下するおそれがあった。
【0005】
本発明は、上述した問題点を解決するためになされたものであり、車両の旋回特性を制御できる車両用制御装置を提供することを目的としている。
【課題を解決するための手段および発明の効果】
【0006】
この目的を達成するために請求項1記載の車両用制御装置によれば、状態量取得手段により車両の状態量が取得され、その車両の状態量に基づいてスタビリティファクタ演算手段により車両のスタビリティファクタが演算される。演算されたスタビリティファクタと別途定める基準スタビリティファクタとが比較手段により比較され、その比較結果に基づいて第1キャンバ角調整手段によりキャンバ角調整装置が駆動され、前輪および後輪の少なくとも一つのキャンバ角が調整される。スタビリティファクタは車両の旋回特性を表すため、スタビリティファクタに基づいて車輪のキャンバ角を調整することにより車両の旋回特性を制御できる効果がある。
【0007】
請求項2記載の車両用制御装置によれば、比較手段による比較結果は、車両のスタビリティファクタと基準スタビリティファクタとの偏差であり、その偏差が小さくなるように第1キャンバ角調整手段によりキャンバ角調整装置が駆動され、車輪のキャンバ角が調整される。これにより、請求項1の効果に加え、車両の旋回特性を別途定められた旋回特性に近づけて安定化できる効果がある。
【0008】
請求項3記載の車両用制御装置によれば、比較手段により車両のスタビリティファクタが基準スタビリティファクタより小さいと判断される場合に、第1キャンバ角調整手段によりキャンバ角調整装置が駆動され車輪のキャンバ角が調整される。ここで、スタビリティファクタが小さくなるのはオーバーステア傾向であり車両が不安定になり、スタビリティファクタが大きくなるのはアンダーステア傾向である。車両のスタビリティファクタが基準スタビリティファクタより小さいと判断される場合に車輪のキャンバ角が調整されるので、車両のスタビリティファクタを大きくすることができ、請求項1又は2の効果に加え、車両をアンダーステア傾向に制御できる効果がある。
【0009】
請求項4記載の車両用制御装置によれば、状態量取得手段により車両の状態量が取得され、その車両の状態量が所定の条件を満たすか状態量判断手段により判断される。判断の結果、車両の状態量が所定の条件を満たすと判断される場合に、第2キャンバ角調整手段によりキャンバ角調整装置が駆動され前輪および後輪の少なくとも一つのキャンバ角が調整される。また、状態量取得手段により取得される車両の状態量に基づいてスタビリティファクタ演算手段により車両のスタビリティファクタが演算され、そのスタビリティファクタに基づいて第1条件変更手段により所定の条件が変更される。スタビリティファクタは車両の旋回特性を表すところ、スタビリティファクタに基づいて車輪のキャンバ角が調整される条件が変更されるので、車輪のキャンバ角の調整により車両の旋回特性を制御できる効果がある。
【0010】
請求項5記載の車両用制御装置によれば、演算されたスタビリティファクタと別途定める基準スタビリティファクタとが比較手段により比較され、スタビリティファクタが基準スタビリティファクタより小さいと判断される場合に、第1条件変更手段により所定の条件が変更される。ここで、スタビリティファクタが小さくなるのはオーバーステア傾向であり車両が不安定になり、スタビリティファクタが大きくなるのはアンダーステア傾向である。車両のスタビリティファクタが基準スタビリティファクタより小さいと判断される場合に車輪のキャンバ角が調整される条件が変更されるので、車輪のキャンバ角の調整により車両のスタビリティファクタを大きくすることができ、請求項4の効果に加え、車両をアンダーステア傾向に制御できる効果がある。
【0011】
請求項6記載の車両用制御装置によれば、状態量取得手段は、前輪および後輪の輪荷重に関する情報を取得する輪荷重情報取得手段を備えている。ここで、スタビリティファクタは前輪および後輪が発生するコーナリングパワーの配分によって変化し、そのコーナリングパワーは前輪および後輪の輪荷重により変化する。輪荷重情報取得手段により前輪および後輪の輪荷重に関する情報が取得されることで、その輪荷重に関する情報に基づいてスタビリティファクタを演算できる。これによりスタビリティファクタの演算精度を向上させることができ、請求項1から5のいずれかの効果に加え、車両の制御の安定性を向上できる。
【0012】
請求項7記載の車両用制御装置によれば、基準スタビリティファクタは車両が水平面を一定の速度で走行するときの値に設定されているので、車両が坂道を走行する場合には、坂道を走行する車両のスタビリティファクタと、水平面を走行する車両のスタビリティファクタとに基づいて車輪のキャンバ角が調整される。車両が坂道を走行するときと水平面を走行するときとでは、各車輪の輪荷重が変化し、それに伴いスタビリティファクタが変化する。基準スタビリティファクタを車両が水平面を一定の速度で走行するときの値に設定することにより、車両が坂道を走行して輪荷重が変化する影響を考慮して、車輪のキャンバ角を調整できる。これにより、請求項1から6のいずれかの効果に加え、車両が坂道を走行するときと水平面を一定の速度で走行するときとで旋回特性が変わらないように制御することができる効果がある。
【0013】
請求項8記載の車両用制御装置によれば、状態量取得手段により車両の状態量が取得され、その車両の状態量が所定の条件を満たすか状態量判断手段により判断される。判断の結果、車両の状態量が所定の条件を満たすと判断される場合に、第2キャンバ角調整手段によりキャンバ角調整装置が駆動され前輪および後輪の少なくとも一つのキャンバ角が調整される。また、車両の進行方向において水平面に対する車両の傾斜角度が傾斜角度取得手段により取得され、その傾斜角度に基づいて第2条件変更手段により所定の条件が変更される。車両の進行方向において水平面に対する車両の傾斜角度が変わると車両の旋回特性が変わるところ、車両の傾斜角度に基づいて車輪のキャンバ角が調整される条件が変更されるので、車輪のキャンバ角の調整により車両の旋回特性を制御できる効果がある。
【0014】
請求項9記載の車両用制御装置によれば、傾斜角度取得手段により取得される車両の傾斜角度が、車両が降坂路を走行するものに相当すると判断される場合に、第2条件変更手段により所定の条件が変更される。ここで、車両が降坂路を走行するときは車両がオーバーステア傾向になる可能性が高くなるところ、車両の傾斜角度が、車両が降坂路を走行するものに相当すると判断される場合に車輪のキャンバ角が調整される条件が変更されるので、請求項8の効果に加え、車輪のキャンバ角の調整により車両をアンダーステア傾向にすることができる効果がある。
【0015】
請求項10記載の車両用制御装置によれば、第1キャンバ角調整手段または第2キャンバ角調整手段によって駆動されるキャンバ角調整装置により後輪のキャンバ角が調整され、後輪にネガティブキャンバが付与される。後輪にネガティブキャンバが付与されることにより、後輪に発生するキャンバスラストを利用して車両の特性を安定したアンダーステア傾向にすることができるので、請求項1から9のいずれかの効果に加え、車両の旋回安定性を向上できる効果がある。
【図面の簡単な説明】
【0016】
【図1】第1実施の形態における車両用制御装置が搭載される車両を模式的に示した模式図である。
【図2】懸架装置の正面図である。
【図3】車両用制御装置の電気的構成を示したブロック図である。
【図4】(a)は車両の傾斜角度の検出方法を説明する模式図であり、(b)は軸重の検出方法を説明する模式図であり、(c)は後輪のコーナリングパワー関数の内容を模式的に示す模式図である。
【図5】(a)は車両の傾斜角度とスタビリティファクタとの関係を示す模式図であり、(b)は後輪のキャンバ角とスタビリティファクタとの関係を示す模式図である。
【図6】キャンバ角調整処理を示すフローチャートである。
【図7】第2実施の形態におけるキャンバ角調整処理を示すフローチャートである。
【図8】第3実施の形態における車両用制御装置の電気的構成を示したブロック図である。
【図9】閾値関数の内容を模式的に示す模式図である。
【図10】条件変更処理を示すフローチャートである。
【図11】キャンバ角調整処理を示すフローチャートである。
【図12】第4実施の形態における車両用制御装置が搭載される車両を模式的に示した模式図である。
【図13】懸架装置の正面図である。
【図14】前輪のキャンバ角とスタビリティファクタとの関係を示す模式図である。
【図15】第5実施の形態における車両用制御装置に記憶される閾値関数の内容を模式的に示す模式図である。
【図16】条件変更処理を示すフローチャートである。
【発明を実施するための形態】
【0017】
以下、本発明の好ましい実施の形態について添付図面を参照して説明する。図1は、本発明の第1実施の形態における車両用制御装置100が搭載される車両1を模式的に示した模式図である。なお、図1の矢印U−D,L−R,F−Bは、車両1の上下方向、左右方向、前後方向をそれぞれ示している。
【0018】
まず、車両1の概略構成について説明する。車両1は、図1に示すように、車体フレームBFと、その車体フレームBFを支持する複数(本実施の形態では4輪)の車輪2と、それら複数の車輪2の内の一部(本実施の形態では、左右の前輪2FL,2FR)を回転駆動する車輪駆動装置3と、複数の車輪2の内の一部(本実施の形態では、左右の後輪2RL,2RR)を車体フレームBFに懸架する複数の懸架装置4及び複数の車輪2の内の一部(本実施の形態では、左右の前輪2FL,2FR)を車体フレームBFに懸架する複数の懸架装置40と、複数の車輪2の内の一部(本実施の形態では、左右の前輪2FL,2FR)を操舵する操舵装置5とを主に備えて構成されている。
【0019】
次いで、各部の詳細構成について説明する。車輪2は、図1に示すように、車両1の前方側(矢印F方向側)に位置する左右の前輪2FL,2FRと、車両1の後方側(矢印B方向側)に位置する左右の後輪2RL,2RRとを備えている。なお、本実施の形態では、左右の前輪2FL,2FRは、車輪駆動装置3により回転駆動される駆動輪として構成されている。また、車輪2は、左右の前輪2FL,2FR及び左右の後輪2RL,2RRが全て同じ形状、外径および特性に構成されている。なお、左右の後輪2RL,2RRを車体フレームBFに回転可能に支持するシャフト(車軸)及び後輪2RL,2RRを駆動する車輪駆動装置の図示は省略している。
【0020】
車輪駆動装置3は、上述したように、左右の前輪2FL,2FRを回転駆動するための装置であり、後述するように電動モータ3aにより構成されている(図3参照)。また、電動モータ3aは、図1に示すように、デファレンシャルギヤ(図示せず)及び一対のドライブシャフト31(車軸)を介して左右の前輪2FL,2FRに接続されている。
【0021】
運転者がアクセルペダル61を操作した場合には、車輪駆動装置3から左右の前輪2FL,2FRに回転駆動力が付与され、それら左右の前輪2FL,2FRがアクセルペダル61の操作量に応じて回転駆動される。なお、左右の前輪2FL,2FRの回転差は、デファレンシャルギヤにより吸収される。
【0022】
懸架装置4,40は、路面から車輪2を介して車体フレームBFに伝わる振動を緩和するための装置、いわゆるサスペンションとして機能するものであり、伸縮可能に構成され、図1に示すように、懸架装置4は左右の後輪2RL,2RRに、懸架装置40は左右の前輪2FL,2FRにそれぞれ設けられている。また、本実施の形態における懸架装置4は、車輪2のキャンバ角を調整するキャンバ角調整機構としての機能を兼ね備えている。
【0023】
ここで、図2を参照して、懸架装置4の詳細構成について説明する。図2は、懸架装置4の正面図である。なお、ここでは、キャンバ角調整機構として機能する構成のみについて説明し、サスペンションとして機能する構成については周知の構成と同様であるので、その説明を省略する。また、各懸架装置4の構成は、左右の後輪2RL,2RRにおいてそれぞれ共通であるので、右の後輪2RRに対応する懸架装置4を代表例として図2に図示する。但し、図2では、理解を容易とするためにドライブシャフト31等の図示が省略されている。
【0024】
懸架装置4は、図2に示すように、ストラット41及びロアアーム42を介して車体フレームBFに支持されるナックル43と、駆動力を発生するRRモータ44RRと、そのRRモータ44RRの駆動力を伝達するウォームホイール45及びアーム46と、それらウォームホイール45及びアーム46から伝達されるRRモータ44RRの駆動力によりナックル43に対して揺動駆動される可動プレート47とを主に備えて構成されている。
【0025】
ナックル43は、車輪2を操舵可能に支持するものであり、図2に示すように、上端(図2上側)がストラット41に連結されると共に、下端(図2下側)がボールジョイントを介してロアアーム42に連結されている。RRモータ44RRは、可動プレート47に揺動駆動のための駆動力を付与するものであり、DCモータにより構成され、その出力軸44aにはウォーム(図示せず)が形成されている。ウォームホイール45は、RRモータ44RRの駆動力をアーム46に伝達するものであり、RRモータ44RRの出力軸44aに形成されたウォームに噛み合い、かかるウォームと共に食い違い軸歯車対を構成している。
【0026】
アーム46は、ウォームホイール45から伝達されるRRモータ44RRの駆動力を可動プレート47に伝達するものであり、図2に示すように、一端(図2右側)が第1連結軸48を介してウォームホイール45の回転軸45aから偏心した位置に連結される一方、他端(図2左側)が第2連結軸49を介して可動プレート47の上端(図2上側)に連結されている。可動プレート47は、車輪2を回転可能に支持するものであり、上述したように、上端(図2上側)がアーム46に連結される一方、下端(図2下側)がキャンバ軸50を介してナックル43に揺動可能に軸支されている。
【0027】
上述したように構成される懸架装置4によれば、RRモータ44RRが駆動されると、ウォームホイール45が回転すると共に、ウォームホイール45の回転運動がアーム46の直線運動に変換される。その結果、アーム46が直線運動することで、可動プレート47がキャンバ軸50を揺動軸として揺動駆動され、車輪2のキャンバ角が調整される。
【0028】
なお、本実施の形態では、各連結軸48,49及びウォームホイール45の回転軸45aが、車体フレームBFから車輪2に向かう方向(矢印R方向)において、第1連結軸48、回転軸45a、第2連結軸49の順に一直線上に並んで位置する第1キャンバ状態と、回転軸45a、第1連結軸48、第2連結軸49の順に一直線上に並んで位置する第2キャンバ状態(図2に示す状態)とのいずれか一方のキャンバ状態となるように車輪2のキャンバ角が調整される。
【0029】
これにより、車輪2のキャンバ角が第1キャンバ状態若しくは第2キャンバ状態に調整された状態では、車輪2に外力が加わったとしても、アーム46を回動させる方向の力は発生せず、車輪2のキャンバ角を維持することができる。また、本実施の形態では、第1キャンバ状態において、車輪2のキャンバ角がマイナス方向の所定の角度(本実施の形態では−4.5°、以下「第1キャンバ角」と称す)に調整され、車輪2にネガティブキャンバが付与される。一方、第2キャンバ状態(図2に示す状態)では、車輪2のキャンバ角が第1キャンバ角より絶対値が小さく、第1キャンバ角よりポジティブ方向の所定の角度(本実施の形態では−1.5°、以下「第2キャンバ角」と称す)の定常角に調整される。
【0030】
なお、懸架装置40は、左右の前輪2FL,2FRのキャンバ角を調整する機能が省略されている点(即ち、図2に示す懸架装置4において、RRモータ44RRによる伸縮機能が省略されている点)を除き、その他の構成は懸架装置4と同じ構成であるので、その説明を省略する。即ち、後輪2RL,2RRのキャンバ角は第1キャンバ角または第2キャンバ角に調整可能であるが、前輪2FL,2FRはキャンバ角の調整ができない構成とされている。
【0031】
図1に戻って説明する。操舵装置5は、運転者によるステアリング63の操作を左右の前輪2FL,2FRに伝えて操舵するための装置であり、いわゆるラック&ピニオン式のステアリングギヤとして構成されている。この操舵装置5によれば、運転者によるステアリング63の操作(回転)は、まず、ステアリングコラム51を介してユニバーサルジョイント52に伝達され、ユニバーサルジョイント52により角度を変えられつつステアリングボックス53のピニオン53aに回転運動として伝達される。そして、ピニオン53aに伝達された回転運動は、ラック53bの直線運動に変換され、ラック53bが直線運動することで、ラック53bの両端に接続されたタイロッド54が移動する。その結果、タイロッド54がナックル55を押し引きすることで、前輪2FL,2FR(車輪2)に所定の舵角が付与される。
【0032】
アクセルペダル61及びブレーキペダル62は、運転者により操作される操作部材であり、各ペダル61,62の操作状態(踏み込み量、踏み込み速度など)に応じて、車両1の走行速度や制動力が決定され、車輪駆動装置3が駆動制御される。ステアリング63は、運転者により操作される操作部材であり、その操作状態(ステア角、ステア角速度など)に応じて、操舵装置5により左右の前輪2FL,2FRが操舵される。
【0033】
車両用制御装置100は、上述したように構成される車両1の各部を制御するための装置であり、例えば、各ペダル61,62やステアリング63の操作状態に応じてキャンバ角調整装置44(図3参照)を作動制御する。
【0034】
次いで、図3を参照して、車両用制御装置100の詳細構成について説明する。図3は、車両用制御装置100の電気的構成を示したブロック図である。車両用制御装置100は、図3に示すように、CPU71、ROM72及びRAM73を備え、それらがバスライン74を介して入出力ポート75に接続されている。また、入出力ポート75には、車輪駆動装置3等の装置が接続されている。
【0035】
CPU71は、バスライン74により接続された各部を制御する演算装置である。ROM72は、CPU71により実行される制御プログラム(例えば、図6に図示されるフローチャートのプログラム)や固定値データ等を記憶する書き換え不能な不揮発性のメモリであり、図3に示すようにコーナリングパワー関数72a(図4(c)参照)が記憶されている。コーナリングパワー関数72aは、前輪2FL,2FR及び後輪2RL,2RRそれぞれの軸重Wf,Wrに対するコーナリングパワーKf,Krを示す関数である。
【0036】
RAM73は、制御プログラムの実行時に各種のデータを書き換え可能に記憶するためのメモリであり、図3に示すように、キャンバフラグ73aが設けられている。
【0037】
キャンバフラグ73aは、車輪2のキャンバ角が第1キャンバ角に調整された状態にあるか否かを示すフラグであり、後述するキャンバ角調整処理(図6参照)の実行時にオン又はオフに切り替えられる。CPU71は、このキャンバフラグ73aがオンである場合に、車輪2のキャンバ角が第1キャンバ角に調整された状態にあると判断する。
【0038】
車輪駆動装置3は、上述したように、左右の前輪2FL,2FR(図1参照)を回転駆動するための装置であり、それら左右の前輪2FL,2FRに回転駆動力を付与する電動モータ3aと、その電動モータ3aをCPU71からの指示に基づいて駆動制御する駆動制御回路(図示せず)とを主に備えている。但し、車輪駆動装置3は、電動モータ3aに限られず、他の駆動源を採用することは当然可能である。他の駆動源としては、例えば、油圧モータやエンジン等が例示される。
【0039】
キャンバ角調整装置44は、各車輪2のキャンバ角を調整するための装置であり、上述したように、各懸架装置4の可動プレート47(図2参照)に揺動のための駆動力をそれぞれ付与する合計2個のRLモータ、RRモータ44RL,44RRと、それら各モータ44RL,44RRをCPU71からの指示に基づいて駆動制御する駆動制御回路(図示せず)とを主に備えている。
【0040】
加速度センサ装置80は、車両1の加速度を検出すると共に、その検出結果をCPU71に出力するための装置であり、前後方向加速度センサ80a、左右方向加速度センサ80bと、それら各加速度センサ80a,80bの検出結果を処理してCPU71に出力する出力回路(図示せず)とを主に備えている。
【0041】
前後方向加速度センサ80aは、車両1(車体フレームBF)の前後方向(図1矢印F−B方向)の加速度、いわゆる前後加速度を検出するセンサであり、左右方向加速度センサ80bは、車両1(車体フレームBF)の左右方向(図1矢印L−R方向)の加速度、いわゆる横加速度を検出するセンサである。なお、本実施の形態では、これら各加速度センサ80a,80bが圧電素子を利用した圧電型センサとして構成されている。
【0042】
また、CPU71は、加速度センサ装置80から入力された各加速度センサ80a,810の検出結果(前後加速度、横加速度)を時間積分して、2方向(前後方向および左右方向)の速度をそれぞれ算出すると共に、それら2方向成分を合成することで、車両1の走行速度を取得することができる。
【0043】
ヨーレートセンサ装置81は、車両1のヨーレートを検出すると共に、その検出結果をCPU71に出力するための装置であり、車両1の重心を通る鉛直軸(図1矢印U−D方向軸)回りの車両1(車体フレームBF)の回転角速度を検出するヨーレートセンサ81aと、そのヨーレートセンサ81aの検出結果を処理してCPU71に出力する出力回路(図示せず)とを主に備えている。
【0044】
ナビゲーション装置82は、車両1の現在位置および車両1の進行先の道路情報を取得するための装置であり、GPS衛星から電波を受信して車両1の現在位置を取得する現在位置取得部(図示せず)と、道路情報が記憶された地図データを取得する地図データ取得部(図示せず)と、その地図データ取得部により取得した地図データ及び現在位置取得部により取得した車両1の現在位置に基づいて車両1の現在位置の道路情報(勾配情報)を取得する道路情報取得部(図示せず)と、その道路情報取得部により取得した車両1の現在位置の道路情報を処理してCPU71に出力する出力回路(図示せず)とを主に備えている。CPU71は、ナビゲーション装置82から入力された道路情報から路面の傾斜角度を取得し、そこから車両1の進行方向における路面の水平面に対する傾斜角度θを推定して取得する。
【0045】
サスストロークセンサ装置83は、各懸架装置4の伸縮量を検出すると共に、その検出結果をCPU71に出力するための装置であり、各懸架装置4の伸縮量をそれぞれ検出する合計4個のFL〜RRサスストロークセンサ83FL〜83RRと、それら各サスストロークセンサ83FL〜83RRの検出結果を処理してCPU71に出力する出力回路(図示せず)とを備えている。
【0046】
なお、本実施の形態では、各サスストロークセンサ83FL〜83RRがひずみゲージとして構成されており、これら各サスストロークセンサ83FL〜83RRは、各懸架装置4のショックアブソーバ(図示せず)にそれぞれ配設されている。
【0047】
CPU71は、サスストロークセンサ装置83から入力された各サスストロークセンサ83FL〜83RRの検出結果(伸縮量)に基づいて、各車輪2の接地荷重を取得する。即ち、車輪2の接地荷重と懸架装置4の伸縮量とは比例関係を有しているので、懸架装置4の伸縮量をXとし、懸架装置4の減衰定数をkとすると、車輪2の接地荷重Fは、F=kXとなる。
【0048】
接地荷重センサ装置84は、各車輪2の接地荷重を検出すると共に、その検出結果をCPU71に出力するための装置であり、各車輪2の接地荷重をそれぞれ検出する合計4個のFL〜RR接地荷重センサ84FL〜84RRと、それら各接地荷重センサ84FL〜84RRの検出結果を処理してCPU71に出力する出力回路(図示せず)とを備えている。
【0049】
なお、本実施の形態では、各接地荷重センサ84FL〜84RRがピエゾ抵抗型の荷重センサとして構成されており、これら各接地荷重センサ84FL〜84RRは、各懸架装置4のショックアブソーバ(図示せず)にそれぞれ配設されている。
【0050】
傾斜センサ装置85は、水平面に対する車両1の角度を検出すると共に、その検出結果をCPU71に出力するための装置であり、水平面に対する車両1の前後方向(図1矢印F−B方向)の角度を検出する傾斜センサ(図示せず)と、その傾斜センサの検出結果を処理してCPU71に出力する出力回路(図示せず)とを備えている。なお、本実施の形態では、静電容量型の傾斜センサとして構成されている。
【0051】
ハイトセンサ装置86は、車体フレームBFの高さ(車高)を検出すると共に、その検出結果をCPU71に出力するための装置であり、車体フレームBFに固定された各ハイトセンサ86FL〜86RRと、それら各ハイトセンサ86FL〜86RRの回転軸と各サスペンションアームとを連結するリンク機構(図示せず)と、それら各ハイトセンサ86FL〜86RRの検出結果を処理してCPU71に出力する出力回路(図示せず)とを備えている。ハイトセンサ装置86では、サスペンションアームの相対変位がリンク機構によって回転運動に変換され、各ハイトセンサ86FL〜86RRの回転軸に伝達されて、その回転軸の回転角として現れる。その回転角から車体フレームBFの高さ(車高)を検出することができる。
【0052】
また、CPU71は、ハイトセンサ装置86から入力された各ハイトセンサ86FL〜86RRの検出結果(回転角)に基づいて、各車輪2の接地荷重(輪荷重)を取得する。即ち、輪荷重とハイトセンサの回転角とは比例関係を有しているので、入力された回転角から輪荷重を取得することができる。
【0053】
回転速度センサ装置87は、車輪2(図1参照)の回転速度を検出すると共に、その検出結果をCPU71に出力するための装置であり、左前輪2FLを支持するドライブシャフト31(車軸)の回転速度を検出するFL回転速度センサ87FLと、右前輪2FRを支持するドライブシャフト31(車軸)の回転速度を検出するFR回転速度センサ87FRと、左後輪2RLを支持するシャフト(車軸)(図示せず)の回転速度を検出するRL回転速度センサ87RLと、右後輪2RRを支持するシャフト(車軸)(図示せず)の回転速度を検出するRR回転速度センサ87RRと、それら各回転速度センサ87FL〜87RRの検出結果を処理してCPU71に出力する出力回路(図示せず)とを備えている。
【0054】
CPU71は、回転速度センサ装置87から入力された検出結果(車軸の回転速度)に基づいて、車両1の動加速度成分(前後加速度から重力加速度成分を除いた加速度)を取得する。即ち、車両1の動加速度成分は、回転速度センサ装置87から入力される車軸の回転速度の時間微分値と、車輪2の外径とを乗じることにより算出される。
【0055】
アクセルペダルセンサ装置61aは、アクセルペダル61の操作量を検出すると共に、その検出結果をCPU71に出力するための装置であり、アクセルペダル61の踏み込み量を検出する角度センサ(図示せず)と、その角度センサの検出結果を処理してCPU71に出力する出力回路(図示せず)とを主に備えている。
【0056】
ブレーキペダルセンサ装置62aは、ブレーキペダル62の操作量を検出すると共に、その検出結果をCPU71に出力するための装置であり、ブレーキペダル62の踏み込み量を検出する角度センサ(図示せず)と、その角度センサの検出結果を処理してCPU71に出力する出力回路(図示せず)とを主に備えている。
【0057】
ステアリングセンサ装置63aは、図示しないステアリング軸の回転角(操舵角θ)を検出すると共に、その検出結果をCPU71に出力するための装置であり、ステアリング軸の回転角を検出する角度センサ(図示せず)と、その角度センサの検出結果を処理してCPU71に出力する出力回路(図示せず)とを主に備えている。
【0058】
なお、本実施の形態では、各角度センサが電気抵抗を利用した接触型のポテンショメータとして構成されている。また、CPU71は、各センサ装置61a,62a,63aから入力された各角度センサの検出結果(操作量)を時間微分して、各ペダル61,62の踏み込み速度および操舵角θの時間微分値(操舵角速度)を取得することができる。
【0059】
図3に示す他の入出力装置90としては、例えば、ロール角センサ装置、舵角比可変操舵装置が例示される。ロール角センサ装置は、車両1のロール角を検出すると共に、その検出結果をCPU71に出力するための装置であり、車両1の重心を通る前後軸(図1矢印F−B方向軸)回りの車両1(車体フレームBF)の回転角を検出するロール角センサと、そのロール角センサの検出結果を処理してCPU71に出力する出力回路とを主に備えている。舵角比可変操舵装置は、車両1の走行速度に応じてステアリングギヤ比を演算し、このステアリングギヤ比に基づいて前輪2FL,2FRを転舵させる装置である。舵角比可変操舵装置は、特開平6−227422号公報、特開平9−58507号公報等に公知であるので、その説明は省略する。
【0060】
次に、本発明による旋回特性(ステア特性)の制御の原理について説明する。まず、図4を参照して、スタビリティファクタの演算方法の一例について説明する。スタビリティファクタは車両1の旋回特性(ステア特性)を示す値であり、以下の式(1)により演算できる。
【0061】
【数1】
【0062】
但し、Aはスタビリティファクタ、mは車両1の質量、lfは前軸と重心Gとの距離、lrは後軸と重心Gとの距離、Lは車両のホイールベース(L=lf+lr)、Kfは前輪のコーナリングパワー、Krは後輪のコーナリングパワーである。A>0のときは車両1の旋回特性がアンダーステアであることを示し、A<0のときはオーバーステアであることを示す。
【0063】
以下、車両1の傾斜角度θの検出結果から軸重Wf,Wrを演算し、軸重Wf,Wrに基づいて車輪2のコーナリングパワーKf,Krを演算した後、スタビリティファクタAを演算する方法について説明する。図4(a)は車両1の傾斜角度θの検出方法を説明する模式図であり、図4(b)は軸重Wf,Wrの検出方法を説明する模式図であり、図4(c)は後輪2RL,2RRのコーナリングパワー関数の内容を模式的に示す模式図である。なお、車両1の傾斜角度θの符号は、車両1が降坂路を走行しており路面が車両1からみて下り坂の場合を負、車両1が登坂路を走行しており路面が車両1からみて上り坂の場合を正とする。なお、路面の傾斜角度θは、その路面を走行する車両1の傾斜角度θと近似できる。
【0064】
図4(a)に示すように車両1が坂道を走行しているときは、前後方向加速度センサ80aが検出する前後加速度は、路面の傾斜による加速度(重力加速度成分)と車両1の駆動力や制動力による加速度(動加速度成分)とが合成される。ここで、重力加速度成分は、図4(a)に示すように、路面の傾斜角度θのときg・sinθ(但しgは重力加速度)である。また、動加速度成分は、回転速度センサ装置87により検出される車軸の回転速度の時間微分値と、車輪2の外径とを乗じることにより算出される。よって、重力加速度成分(g・sinθ)は、前後方向加速度センサ80aが検出する前後加速度から動加速度成分を減じることにより算出することができ、算出された重力加速度成分から路面の傾斜角度θ[rad]、即ち、車両1の進行方向において水平面に対する車両1の傾斜角度θを算出できる。
【0065】
また、車両1の質量mは、車両1の加速度および駆動力に基づいて、例えば特開2004−301576号公報、特開2002−340660号公報などに開示される既知の方法により算出できる。算出された質量mに重力加速度gを乗じて荷重Wが算出される。
【0066】
図4(b)に示すように、荷重Wは、前輪2FL,2FRの軸重Wf及び後輪2RL,2RRの軸重Wrに分配される(W=Wf+Wr)。分配された軸重Wfは以下の式(2)により求められ、軸重Wrは式(3)により求められる。
【0067】
【数2】
【0068】
但し、hは車両1の重心Gの高さ、aは車両1の前後加速度の動加速度成分、lfは前軸と重心Gとの距離、lrは後軸と重心Gとの距離、Lは車両のホイールベース(L=lf+lr)である。
【0069】
図4(c)に示すように、後輪2RL,2RRのコーナリングパワーKrは、後輪2RL,2RRの軸重Wrに対して正の傾きをもつ関数として表される。前輪2FL,2FRのコーナリングパワーKfも、図4(c)と同様に、前輪2FL,2FRの軸重Wfに対して正の傾きをもつ関数として表されるので、図示は省略する。また、図4(c)はコーナリングパワー関数が非線形の例を模式的に示したが、コーナリングパワー関数が線形となる場合もある。コーナリングパワーKf,Krは、軸重Wf,Wr及びタイヤの接地面積等の条件によって変動するので、タイヤの接地面積等の条件毎に軸重Wf,Wrに対する関数を設けておき、該当する関数に軸重Wf,Wrを代入することで算出できる。算出されたコーナリングパワーKf,Kr,質量m及び車両1により定まるホイールベースL,lf,lrを式(1)に代入することにより、スタビリティファクタAが求められる。
【0070】
なお、式(2)及び式(3)において、車両1の前後加速度の動加速度成分a=0、車両1の傾斜角度θ=0として軸重Wf,Wrを求め、その軸重Wf,Wr,ホイールベースL,lf,lrを式(1)に代入して得られる値を基準スタビリティファクタArとする。本実施の形態では、基準スタビリティファクタArは、車両1が水平面(平坦路)を一定の速度で走行するときのスタビリティファクタである。基準スタビリティファクタArは、標準タイヤや標準的な路面の摩擦係数等に基づいて車両毎に予め一定値を定めることができ、ROM72(図3参照)に記憶されている。
【0071】
次に、図5を参照して、車両1の傾斜角度θとスタビリティファクタとの関係について説明し、後輪2RL,2RRのキャンバ角とスタビリティファクタとの関係について説明する。図5(a)は車両1の傾斜角度θ(横軸)とスタビリティファクタ(縦軸)との関係を示す模式図であり、(b)は後輪2RL,2RRのキャンバ角(横軸)とスタビリティファクタ(縦軸)との関係を示す模式図である。なお、図5(a)において、車両1の傾斜角度θの符号は、車両1が降坂路を走行しており路面が車両1からみて下り坂(down)の場合を負、車両1が登坂路を走行しており路面が車両1からみて上り坂(up)の場合を正、路面が水平の場合を0とする。また、図5(b)において、車輪2のキャンバ角は、ネガティブキャンバの場合を負(図5左方向)、ポジティブキャンバの場合を正(図5右方向)とする。
【0072】
図5(a)に示すように、スタビリティファクタAは、車両1の傾斜角度θに対して正の傾きをもつ(傾斜角度θが小さくなるとスタビリティファクタが小さくなる)。即ち、車両1のスタビリティファクタAは、降坂路では小さくなり登坂路では大きくなる。これは、坂道におかれた車両1は傾斜角度θが小さくなる(下り勾配が大きくなる)につれ、荷重が前方に移動し軸重Wfが大きくなると共に軸重Wrが小さくなることによる。これに伴い、コーナリングパワーKfが大きくなると共にコーナリングパワーKrが小さくなる(図4(c)参照)。スタビリティファクタは式(1)で算出されるところ、コーナリングパワーKfが大きくなると共にコーナリングパワーKrが小さくなれば、スタビリティファクタAが小さくなる。
【0073】
前述したようにスタビリティファクタA>0のときは車両1の旋回特性がアンダーステアであることを示し、A<0のときはオーバーステアであることを示す。本実施の形態では、図5(a)に示すように、車両1は基準スタビリティファクタAr>0(アンダーステア)に設定されているが、傾斜角度θ<0のときは(下り坂を走行するときは)、スタビリティファクタAが小さくなり車両1の特性がオーバーステア傾向に変化する。
【0074】
本発明者らは、車輪2のキャンバ角を調整することでスタビリティファクタを大きくできる(車両1の旋回特性をアンダーステア傾向に変えられる)ことを見出した。即ち、図5(b)に示すように、後輪2RL,2RRのキャンバ角をマイナス側(図5(b)左側)に調整する(後輪2RL,2RRにネガティブキャンバを付与する)ことで、スタビリティファクタAを増加できる。本発明者らが解析した条件のもとでは、後輪2RL,2RRのキャンバ角を0[deg]から−4[deg]に調整して後輪2RL,2RRにネガティブキャンバを付与することで、車両1のスタビリティファクタが約3×10−4[s2/m2]増加した。
【0075】
これを適用して、図5(a)に示すように、傾斜角度θ<0の路面(下り坂)を走行する車両1のスタビリティファクタがAeであるとすると、後輪2RL,2RRのキャンバ角をマイナス側に調整することで、スタビリティファクタAeを基準スタビリティファクタArに近づけることができる。これにより、車両1の旋回特性を制御できる。
【0076】
次に、図6を参照して、車両用制御装置100によるキャンバ角調整処理について説明する。この処理は、車両用制御装置100の電源が投入されている間、CPU71によって繰り返し(例えば、0.2秒間隔で)実行される処理であり、左右の後輪2RL,2RRのキャンバ角を調整する処理である。
【0077】
CPU71は、キャンバ角調整処理に関し、まず、車両1の前後加速度(動加速度成分+重力加速度成分)を取得し(S1)、取得した車両1の前後加速度から重力加速度成分(g・sinθ)を分離する。次いで、分離された重力加速度成分から車両1の進行方向における水平面に対する車両1の傾斜角度θを取得する(S2)。次にCPU71は、式(2)及び式(3)に基づいて前輪2FL,2FR及び後輪2RL,2RRの軸重Wf,Wrを取得する(S3)。次いで、ROM72に予め記憶されたコーナリングパワー関数72a(図4(c)参照)により軸重Wf,Wrに基づきコーナリングパワーKf,Krを取得し(S4)、式(1)に基づいてスタビリティファクタを演算する(S5)。次に、演算された現在のスタビリティファクタと、ROM72に予め記憶された基準スタビリティファクタとを比較して、現在のスタビリティファクタが基準スタビリティファクタ以上であるか否かを判断する(S6)。
【0078】
その結果、現在のスタビリティファクタが基準スタビリティファクタ以上であると判断される場合には(S6:Yes)、次に、現在のスタビリティファクタが基準スタビリティファクタに対して所定値以上大きいか否かを判断する(S7)。S7の処理における所定値としては、後輪2RL,2RRのキャンバ角が第1キャンバ角(−4.5°)であるときのスタビリティファクタから、後輪2RL,2RRのキャンバ角が第2キャンバ角(−1.5°)であるときのスタビリティファクタを減じた値を採用することができる。
【0079】
S7の処理の結果、現在のスタビリティファクタが基準スタビリティファクタに対して所定値以上大きいと判断される場合には(S7:Yes)、キャンバフラグ73aがオンであるか否かを判断する(S8)。その結果、キャンバフラグ73aがオンであると判断される場合には(S8:Yes)、RL〜RRモータ44RL,44RRを作動させて、後輪2RL,2RRのキャンバ角を第2キャンバ角に調整し、後輪2RL,2RRへのネガティブキャンバの付与を解除すると共に(S9)、キャンバフラグ73aをオフして(S10)、このキャンバ角調整処理を終了する。
【0080】
即ち、現在のスタビリティファクタが基準スタビリティファクタに対して所定値以上大きいと判断される場合は(S7:Yes)、車両1の旋回特性は、基準スタビリティファクタの状態に対して十分なアンダーステア傾向にある。従って、後輪2RL,2RRへのネガティブキャンバの付与を解除することで、後輪2RL,2RRに生じるキャンバスラストを抑制して、操舵応答性を確保することができる。
【0081】
また、S8の処理の結果、キャンバフラグ73aがオフであると判断される場合には(S8:No)、後輪2RL,2RRのキャンバ角は既に第2キャンバ角に調整されているので、このキャンバ角調整処理を終了する。これにより、後輪2RL,2RRにキャンバスラストが生じることを抑制して操舵応答性を確保できると共に、車両1の旋回特性を十分なアンダーステア傾向に維持できる。
【0082】
これに対し、S7の処理の結果、現在のスタビリティファクタと基準スタビリティファクタとの差が所定値未満であると判断される場合には(S7:No)、このキャンバ角調整処理を終了する。即ちこの場合は、車両1の旋回特性は基準スタビリティファクタの状態に対してアンダーステア傾向にあるので、車両1は安定である。しかし、現在のスタビリティファクタと基準スタビリティファクタとの差が所定値未満であるので、後輪2RL,2RRのキャンバ角が第1キャンバ角から第2キャンバ角に調整されると、スタビリティファクタが基準スタビリティファクタより小さくなり、オーバーステア傾向になるおそれがある。また、後輪2RL,2RRのキャンバ角が第2キャンバ角から第1キャンバ角に調整されると、後輪2RL,2RRのキャンバスラストにより操舵応答性が低下するおそれがある。従って、後輪2RL,2RRのキャンバ角の調整を行うことなくキャンバ角調整処理を終了することにより、車両1の安定性を確保する。
【0083】
一方、S6の処理の結果、現在のスタビリティファクタが基準スタビリティファクタ以上でないと判断される場合には(S6:No)、次にキャンバフラグ73aがオンであるか否かを判断する(S11)。その結果、キャンバフラグ73aがオンでないと判断される場合には(S11:No)、RL〜RRモータ44RL,44RRを作動させて、後輪2RL,2RRのキャンバ角を第1キャンバ角に調整し、後輪2RL,2RRにネガティブキャンバを付与すると共に(S12)、キャンバフラグ73aをオンして(S13)、このキャンバ角調整処理を終了する。
【0084】
即ち、現在のスタビリティファクタが基準スタビリティファクタ以上でないと判断される場合は(S6:No)、車両1の旋回特性は基準スタビリティファクタの状態に対してオーバーステア傾向にある。この場合に後輪2RL,2RRのキャンバ角を第2キャンバ角(−1.5°)から第1キャンバ角(−4.5°)に調整することにより、アンダーステア傾向にすることができる。また、S11の処理の結果、キャンバフラグ73aがオンであると判断される場合には(S11:Yes)、後輪2RL,2RRのキャンバ角は既に第1キャンバ角に調整されているので、S12及びS13の処理をスキップして、このキャンバ角調整処理を終了する。
【0085】
以上説明したように第1実施の形態によれば、車両1の旋回特性を表すスタビリティファクタが演算され、そのスタビリティファクタと基準スタビリティファクタとが比較される。その比較結果に基づいて車輪2のキャンバ角が調整されるので、車両1の旋回特性を制御できる。また、現在のスタビリティファクタと基準スタビリティファクタとの偏差が小さくなるように車輪2のキャンバ角が調整されるので、車両1の旋回特性を、基準スタビリティファクタを定めた車両1の旋回特性に近づけることができる。これにより、車両1の旋回特性を安定化できる。また、現在のスタビリティファクタが基準スタビリティファクタより小さいと判断される場合に、スタビリティファクタを大きくするように車輪2のキャンバ角が調整されるので、車両1をアンダーステア傾向に制御できる。
【0086】
また、第1実施の形態では、キャンバ角調整装置44により後輪2RL,2RRのキャンバ角が調整され、後輪2RL,2RRにネガティブキャンバが付与される。下り坂を走行する車両1では、後輪2RL,2RRの軸重Wr(図4参照)が前輪2FL,2FRの軸重Wfに比べて小さくなるので、後輪2RL,2RRのキャンバ角が第1キャンバ角に調整されて接地面積が減ることによる後輪2RL,2RRの偏磨耗を抑制できる。さらに、後輪2RL,2RRにネガティブキャンバが付与されることにより、後輪2RL,2RRに発生するキャンバスラストを利用して車両1の特性を安定したアンダーステア傾向にすることができ、車両の旋回安定性を向上できる。
【0087】
なお、図6に示すフローチャート(キャンバ角調整処理)において、請求項1記載の状態量取得手段としてはS1〜S3の処理が、スタビリティファクタ演算手段としてはS5の処理が、比較手段としてはS6及びS7の処理が、第1キャンバ角調整手段としてはS9及びS12の処理がそれぞれ該当する。請求項6記載の輪荷重情報取得手段としてはS3の処理が該当する。
【0088】
次いで、図7を参照して、第2実施の形態について説明する。第1実施の形態では、取得した軸重に基づいてスタビリティファクタを演算する場合について説明した。これに対し第2実施の形態では、車両1の走行速度、ステアリングギヤ比およびヨーレートを取得し、それらに基づいてスタビリティファクタを演算する場合について説明する。なお、第2実施の形態は、第1実施の形態で説明した車両1に搭載される車両用制御装置100で実行されるものとする。なお、第1実施の形態と同一の部分については、同一の符号を付してその説明を省略する。
【0089】
次に、図7を参照して、車両用制御装置100によるキャンバ角調整処理について説明する。この処理は、車両用制御装置100の電源が投入されている間、CPU71によって繰り返し(例えば、0.2秒間隔で)実行される処理であり、左右の後輪2RL,2RRのキャンバ角を調整する処理である。なお、図7に図示されるフローチャートのプログラムは、車両用制御装置100のROM72に記憶されている。
【0090】
キャンバ角調整処理に関し、CPU71は、車両1の走行速度、ステアリングギヤ比およびヨーレートを取得する(S21〜S23)。次いで、以下の式(4)に基づいてスタビリティファクタを演算する(S5)。なお、ステアリングギヤ比は、車両1の走行速度に応じて舵角比可変操舵装置(図3に示す他の入出力装置90)により演算されるので、CPU71は、舵角比可変操舵装置による演算結果を取得する。
【0091】
【数3】
【0092】
但し、Aはスタビリティファクタ、Vは車両の走行速度、εは車両1のトウ角、Nはステアリングギヤ比、γはヨーレート、Lは車両1のホイールベースである。なお、S6〜S13の処理は第1実施の形態と同一の処理なので説明を省略する。以上説明したように第2実施の形態によれば、スタビリティファクタを演算するために取得する状態量の数を少なくすることができ、簡易にスタビリティファクタを演算できる。
【0093】
次いで、図8〜図11を参照して、第3実施の形態について説明する。第1実施の形態および第2実施の形態では、スタビリティファクタと基準スタビリティファクタとを比較して、その比較結果に基づいて後輪2RL,2RRのキャンバ角を調整する場合について説明した。これに対し第3実施の形態では、スタビリティファクタに基づいて後輪2RL,2RRのキャンバ角を調整する閾値を変更する場合について説明する。なお、第3実施の形態の処理が行われる車両用制御装置110は、第1実施の形態で説明した車両1に搭載されるものとする。なお、第1実施の形態と同一の部分については、同一の符号を付してその説明を省略する。
【0094】
図8を参照して、車両用制御装置110の詳細構成について説明する。図8は車両用制御装置110の電気的構成を示したブロック図である。車両用制御装置110は、図8に示すように、CPU71、ROM172及びRAM73を備え、それらがバスライン74を介して入出力ポート75に接続されている。ROM172は、CPU71により実行される制御プログラム(例えば、図10及び図11に図示されるフローチャートのプログラム)や固定値データ等を記憶する書き換え不能な不揮発性のメモリであり、図8に示すようにコーナリングパワー関数72a(図4(c)参照)及び閾値関数172bが記憶されている。RAM73は、制御プログラムの実行時に各種のデータを書き換え可能に記憶するためのメモリであり、ROM172に記憶された閾値関数172bに基づいて設定された閾値が記憶されている。
【0095】
ここで、図9を参照して、閾値関数172aについて説明する。図4は閾値関数172aの内容を模式的に示した模式図である。閾値関数172bは、スタビリティファクタと各状態量における閾値との関係を示す線形または非線形の関数である。閾値は、車両1の操舵角や横加速度等の状態量が所定の条件を満たすかの判断のための基準値である。この基準値は、例えば、車輪2のキャンバ角が第2キャンバ角の状態で車両1が加速、制動または旋回をする場合に、車輪2がスリップするおそれがあると判断される限界値であり、車両1が加速、制動または旋回をするときに現れる状態量ごとに定められている。閾値関数172aも状態量ごとに定められている。CPU71は、閾値関数172aの内容に基づいて、車両1のスタビリティファクタAeにおける閾値Teを状態量ごとに設定する。なお、初期設定されている閾値は、基準スタビリティファクタArにおける閾値Trである。
【0096】
次いで、図10を参照して条件変更処理について説明する。図10は条件変更処理を示すフローチャートである。この処理は、車両用制御装置110の電源が投入されている間、CPU71によって繰り返し(例えば、0.2秒間隔で)実行される処理であり、各閾値を変更する処理である。
【0097】
CPU71は、条件変更処理に関し、まずハイトセンサ装置86により検出される回転角を取得する(S31)。CPU71は、ハイトセンサ装置86から入力される回転角に基づき、回転角と比例関係にある車輪2の接地荷重(輪荷重)を演算し、前輪2FL,2FR及び後輪2RL,2RRの軸重Wf,Wrを取得する(S32)。次いで、ROM72に予め記憶されたコーナリングパワー関数72a(図4(c)参照)により軸重Wf,Wrに基づきコーナリングパワーKf,Krを取得し(S33)、式(1)に基づいてスタビリティファクタを演算する(S34)。
【0098】
次に、演算された現在のスタビリティファクタと、ROM72に予め記憶された基準スタビリティファクタとを比較して、現在のスタビリティファクタが基準スタビリティファクタ未満であるか否かを判断する(S35)。その結果、スタビリティファクタが基準スタビリティファクタ未満であると判断される場合には(S35:Yes)、ROM72に記憶された閾値関数172b(図9参照)に基づき、スタビリティファクタの大きさに応じて各閾値を変更し(S36)、変更された閾値をRAM73に記憶して、この条件変更処理を終了する。
【0099】
即ち、現在のスタビリティファクタが基準スタビリティファクタ未満であると判断される場合は(S35:Yes)、車両1の旋回特性は基準スタビリティファクタの状態に対してオーバーステア傾向にある。この場合に、後輪2RL,2RRのキャンバ角が第1キャンバ角に調整されてネガティブキャンバが付与され易くなるように各閾値を変更して、第1キャンバ角に調整される条件を緩和することで、車両1の旋回特性をアンダーステア傾向に変更し易くできる。
【0100】
これに対し、スタビリティファクタが基準スタビリティファクタ未満でないと判断される場合には(S35:No)、RAM73に記憶された各閾値を初期設定された閾値(図9に示す閾値Tr)にして(S37)、この条件変更処理を終了する。
【0101】
即ち、現在のスタビリティファクタが基準スタビリティファクタ未満でないと判断される場合は(S35:No)、車両1の旋回特性は基準スタビリティファクタの状態に対してアンダーステア傾向にある。この場合は、車輪2のキャンバ角が第1キャンバ角に調整されてネガティブキャンバが付与される条件を初期設定の条件にすることで、後輪2RL,2RRのキャンバ角を第1キャンバ角に調整され難くして、車輪2にキャンバスラストが生じることを抑制できる。これにより、車輪2の偏磨耗を抑制できると共に、操舵応答性を確保できる。
【0102】
次いで、図11を参照してキャンバ角調整処理について説明する。図11はキャンバ角調整処理を示すフローチャートである。この処理は、車両用制御装置110の電源が投入されている間、CPU71によって繰り返し(例えば、0.2秒間隔で)実行される処理であり、左右の後輪2RL,2RRのキャンバ角を調整する処理である。
【0103】
CPU71は、キャンバ角調整処理に関し、まず、ステアリング63の操作量(操舵角)、操舵角速度(操舵角の時間微分値)及び横加速度をそれぞれ取得し(S41,S42,S43)、取得した操舵角がRAM73に記憶された所定の閾値以上であるか否かを判断する(S44)。操舵角が所定の閾値以上でないと判断される場合には(S44:No)、次に、取得した操舵角速度がRAM73に記憶された所定の閾値以上であるか否かを判断する(S45)。操舵角速度が所定の閾値以上でないと判断される場合には(S45:No)、次に、取得した横加速度がRAM73に記憶された所定の閾値以上であるか否かを判断する(S46)。横加速度が所定の閾値以上でないと判断される場合には(S46:No)、キャンバフラグ73aがオンであるか否かを判断する(S47)。
【0104】
その結果、キャンバフラグ73aがオンであると判断される場合には(S47:Yes)、RL〜RRモータ44RL,44RRを作動させて、後輪2RL,2RRのキャンバ角を第2キャンバ角に調整し、後輪2RL,2RRのネガティブキャンバの付与を解除すると共に(S48)、キャンバフラグ73aをオフして(S49)、このキャンバ角調整処理を終了する。
【0105】
これに対し、S47の処理の結果、キャンバフラグ73aがオフであると判断される場合には(S47:No)、後輪2RL,2RRのキャンバ角は既に第2キャンバ角に調整されているので、S48及びS49の処理をスキップして、このキャンバ角調整処理を終了する。
【0106】
一方、S44,S45及びS46の処理の結果、操舵角、操舵角速度および横加速度のいずれかが所定の閾値以上であると判断される場合には(S44:Yes,S44:Yes又はS45:Yes)、キャンバフラグ73aがオンであるか否かを判断する(S50)。その結果、キャンバフラグ73aがオフであると判断される場合には(S50:No)、RL〜RRモータ44RL,44RRを作動させて、後輪2RL,2RRのキャンバ角を第1キャンバ角に調整し、後輪2RL,2RRにネガティブキャンバを付与すると共に(S51)、キャンバフラグ73aをオンして(S52)、このキャンバ角調整処理を終了する。
【0107】
これに対し、S50の処理の結果、キャンバフラグ73aがオンであると判断される場合には(S50:Yes)、後輪2RL,2RRのキャンバ角は既に第1キャンバ角に調整されているので、S51及びS52の処理をスキップして、このキャンバ角調整処理を終了する。
【0108】
これにより、車両1の状態量が所定の条件を満たす場合、即ち、ステアリング63の操作による操舵角、操舵角速度および車両1の横加速度の内の少なくとも1の状態量が所定の閾値以上であり、車輪2のキャンバ角が第2キャンバ角の状態で車両1が旋回をすると車輪2がスリップするおそれがあると判断される場合には、車輪2にネガティブキャンバを付与することで、車輪2に発生するキャンバスラストを利用して、車両1の走行安定性を確保することができる。
【0109】
なお、本実施の形態によれば、スタビリティファクタに基づいて閾値が変更されるので、車輪2のキャンバ角の調整により車両1の旋回特性を制御できる。また、本実施の形態によれば、スタビリティファクタAe(図9参照)と基準スタビリティファクタArとが比較され、スタビリティファクタAeが基準スタビリティファクタAr未満であると判断される場合に、閾値が変更される。閾値は、車輪2のキャンバ角が第1キャンバ角に調整される条件を緩和するように変更されるので、車両1の旋回特性をアンダーステア傾向に制御し易くできる。
【0110】
なお、図10に示すフローチャート(条件変更処理)及び図11に示すフローチャート(キャンバ角調整処理)において、請求項4記載の状態量取得手段としてはS31,S32(図10参照),S41,S42,S43(図11参照)の処理が、状態量判断手段としてはS44,S45,S46(図11参照)の処理が、第2キャンバ角調整手段としてはS48,S51(図11参照)の処理が、スタビリティファクタ演算手段としてはS34(図10参照)の処理が、第1条件変更手段としてはS36,S37(図10参照)の処理がそれぞれ該当する。請求項5記載の比較手段としてはS35(図10参照)の処理が、請求項6記載の輪荷重情報取得手段としてはS32(図10参照)の処理がそれぞれ該当する。
【0111】
次いで、図12〜図14を参照して第4実施の形態について説明する。第1実施の形態〜第3実施の形態では、キャンバ角調整装置44により後輪2RL,2RRのキャンバ角が調整される場合について説明した。これに対し、第4実施の形態では、キャンバ角調整装置により前輪2FL,2FRのキャンバ角が調整される場合について説明する。
【0112】
図12は、第4実施の形態における車両用制御装置200が搭載される車両201を模式的に示した模式図である。なお、図12の矢印U−D,L−R,F−Bは、車両201の上下方向、左右方向、前後方向をそれぞれ示している。
【0113】
まず、車両201の概略構成について説明する。図12に示すように、車両201は、複数(本実施の形態では4輪)の車輪2を備えて構成されている。本実施の形態では、左右の前輪2FL,2FRが懸架装置204により車体フレームBFに懸架される一方、左右の後輪2RL,2RRが懸架装置40により車体フレームBFに懸架されている。なお、懸架装置40は左右の後輪2RL,2RRのキャンバ角を調整する機能が省略されている点(即ち、図2に示す懸架装置4において、RRモータ44RRによる伸縮機能が省略されている点)を除き、その他の構成は懸架装置4と同じ構成であるので、その説明を省略する。また、本実施の形態における懸架装置204は、車輪2のキャンバ角を調整するキャンバ角調整機構としての機能を兼ね備えている。
【0114】
ここで、図13を参照して、懸架装置204の詳細構成について説明する。図13は、懸架装置204の正面図である。なお、ここでは、キャンバ角調整機構として機能する構成のみについて説明し、サスペンションとして機能する構成については周知の構成と同様であるので、その説明を省略する。また、各懸架装置204の構成は、左右の前輪2FL,2FRにおいてそれぞれ共通であるので、右の前輪2FRに対応する懸架装置204を代表例として図13に図示する。但し、図13では、理解を容易とするためにドライブシャフト31等の図示が省略されている。
【0115】
懸架装置204は、図13に示すように、ストラット41及びロアアーム42を介して車体フレームBFに支持されるナックル43と、駆動力を発生するFRモータ44FRと、そのFRモータ44FRの駆動力を伝達するウォームホイール45及びアーム246と、それらウォームホイール45及びアーム246から伝達されるFRモータ44FRの駆動力によりナックル43に対して揺動駆動される可動プレート47とを主に備えて構成されている。
【0116】
アーム246は、ウォームホイール45から伝達されるFRモータ44FRの駆動力を可動プレート47に伝達するものであり、図13に示すように、一端(図13右側)が第1連結軸248を介してウォームホイール45の回転軸45aから偏心した位置に連結される一方、他端(図13左側)が第2連結軸49を介して可動プレート47の上端(図13上側)に連結されている。
【0117】
上述したように構成される懸架装置204によれば、FRモータ44FRが駆動されると、ウォームホイール45が回転すると共に、ウォームホイール45の回転運動がアーム246の直線運動に変換される。その結果、アーム246が直線運動することで、可動プレート47がキャンバ軸50を揺動軸として揺動駆動され、車輪2のキャンバ角が調整される。
【0118】
なお、本実施の形態では、各連結軸248,49及びウォームホイール45の回転軸45aが、車体フレームBFから車輪2に向かう方向(矢印R方向)において、回転軸45a、第1連結軸248、第2連結軸49の順に一直線上に並んで位置する第1キャンバ状態と、第1連結軸248、回転軸45a、第2連結軸49の順に一直線上に並んで位置する第2キャンバ状態(図13に示す状態)とのいずれか一方のキャンバ状態となるように車輪2のキャンバ角が調整される。
【0119】
これにより、車輪2のキャンバ角が第1キャンバ状態若しくは第2キャンバ状態に調整された状態では、車輪2に外力が加わったとしても、アーム246を回動させる方向の力は発生せず、車輪2のキャンバ角を維持することができる。また、本実施の形態では、第1キャンバ状態において、車輪2のキャンバ角がプラス方向の所定の角度(本実施の形態では+2.5°、以下「第1キャンバ角」と称す)に調整され、車輪2にポジティブキャンバが付与される。一方、第2キャンバ状態(図13に示す状態)では、車輪2のキャンバ角が第1キャンバ角より絶対値が小さく、第1キャンバ角よりネガティブ方向の所定の角度(本実施の形態では−1.5°、以下「第2キャンバ角」と称す)の定常角に調整される。
【0120】
なお、懸架装置40は、左右の後輪2RL,2RRのキャンバ角を調整する機能が省略されている(即ち、図2に示す懸架装置4において、RRモータ44RRによる伸縮機能が省略されている)ので、後輪2RL,2RRはキャンバ角の調整ができない構成とされている。
【0121】
次に、図14を参照して、前輪2FL,2FRのキャンバ角とスタビリティファクタとの関係を説明する。図14は、前輪2FL,2FRのキャンバ角とスタビリティファクタAとの関係を示す模式図である。図14に示すように、前輪2FL,2FRのキャンバ角をプラス側(図14右側)に調整する(前輪2FL,2FRにポジティブキャンバを付与する)ことで、スタビリティファクタAを増加できる。前輪2FL,2FRのキャンバ角をプラス側に調整することでスタビリティファクタAを増加させ、車両201の旋回特性をアンダーステア傾向にできるので、後輪2RL,2RRのキャンバ角をマイナス側に調整する第1実施の形態〜第3実施の形態と同様の効果を奏することができる。
【0122】
次いで、図15及び図16を参照して、第5実施の形態について説明する。第3実施の形態では、スタビリティファクタに基づいて後輪2RL,2RRのキャンバ角を調整する閾値を変更する場合について説明した。これに対し第5実施の形態では、車両の傾斜角度に基づいて後輪2RL,2RRのキャンバ角を調整する閾値を変更する場合について説明する。なお、第5実施の形態の処理が行われる車両用制御装置110(図8参照)は、第1実施の形態で説明した車両1に搭載されるものとする。なお、第1実施の形態と同一の部分については、同一の符号を付してその説明を省略する。
【0123】
図15を参照して、車両用制御装置110(図8参照)に記憶される閾値関数について説明する。図15は、車両用制御装置110に記憶される閾値関数の内容を模式的に示す模式図である。図15において、横軸は車両1の傾斜角度θを示し、縦軸は閾値を示している。車両1の傾斜角度θの符号は、車両1が降坂路を走行しており路面が車両1からみて下り坂(down)の場合を負、車両1が登坂路を走行しており路面が車両1からみて上り坂(up)の場合を正、路面が水平の場合を0とする。なお、以下説明する閾値関数は、第3実施の形態で説明した閾値関数172b(図8参照)に代えて、ROM172に記憶されている。
【0124】
図15に示す閾値関数は、車両1の傾斜角度θと各状態量における閾値との関係を示す線形または非線形の関数である。閾値は、車両1の操舵角や横加速度等の状態量が所定の条件を満たすかの判断のための基準値である。この基準値は、例えば、車輪2のキャンバ角が第2キャンバ角の状態で車両1が加速、制動または旋回をする場合に、車輪2がスリップするおそれがあると判断される限界値であり、車両1が加速、制動または旋回をするときに現れる状態量ごとに定められている。閾値関数も状態量ごとに定められている。CPU71は、閾値関数の内容に基づいて、車両1の傾斜角度θにおける閾値を状態量ごとに設定する。なお、初期設定されている閾値は、車両1の傾斜角度θ=0における閾値である。
【0125】
次いで、図16を参照して条件変更処理について説明する。図16は条件変更処理を示すフローチャートである。この処理は、車両用制御装置110の電源が投入されている間、CPU71によって繰り返し(例えば、0.2秒間隔で)実行される処理であり、各閾値を変更する処理である。
【0126】
CPU71は、条件変更処理に関し、まず、車両1の進行方向において水平面に対する車両1の傾斜角度θを取得する(S61)。なお、本実施の形態では、車両1の傾斜角度θは傾斜センサ装置85により検出される。CPU71は、傾斜センサ装置85から入力される車両1の傾斜角度θに基づき、ROM72に記憶された閾値関数(図15参照)に基づき、傾斜角度θに応じて各閾値を変更し(S62)、変更された閾値をRAM73に記憶して、この条件変更処理を終了する。
【0127】
即ち、車両1の旋回特性は、車両1の傾斜角度θが負の場合(降坂路を走行の場合)、車両1が水平面を走行する状態に対してオーバーステア傾向にあり、車両1の傾斜角度θが正の場合(登坂路を走行の場合)、車両1が水平面を走行する状態に対してアンダーステア傾向にある(図5(a)参照)。車両1の傾斜角度θが負の場合、後輪2RL,2RRのキャンバ角が第1キャンバ角に調整されてネガティブキャンバが付与され易くなるように各閾値を変更して、第1キャンバ角に調整される条件を緩和することで、車両1の旋回特性をアンダーステア傾向に変更し易くできる。
【0128】
これに対し、車両1の傾斜角度θが正の場合、車両1はアンダーステア傾向にあるので、後輪2RL,2RRのキャンバ角が第1キャンバ角に調整され難くなるように各閾値を変更して、車輪2にキャンバスラストが生じることを抑制できる。これにより、車輪2の偏磨耗を抑制できると共に、操舵応答性を確保できる。
【0129】
なお、第5実施の形態におけるキャンバ角調整処理は、第3実施の形態で説明した処理(図11参照)と同様なので説明を省略する。本実施の形態によれば、車両1の傾斜角度θに基づいて閾値が変更されるので、車輪2のキャンバ角の調整により車両1の旋回特性を制御できる。
【0130】
また、説明を省略したが、車両1の傾斜角度θが負の場合には(車両1が降坂路を走行するものに相当すると判断される場合には)、閾値関数に基づいて閾値が変更されるが、車両1の傾斜角度θが正の場合には(車両1が登坂路を走行するものに相当すると判断される場合には)、初期設定されている閾値(車両1の傾斜角度θ=0における閾値)に閾値を戻すようにすることも可能である。この場合も、車両1が降坂路を走行するときは車両1がオーバーステア傾向になる可能性が高くなるところ、車両1の傾斜角度θが、車両1が降坂路を走行するものに相当すると判断される場合に車輪2のキャンバ角が調整される条件が変更されるので、車輪2のキャンバ角の調整により車両1をアンダーステア傾向にすることができる。さらに、車両1が登坂路を走行するものに相当すると判断される場合に、車輪2のキャンバ角が調整される条件が初期設定されている条件に戻されるため、車両1の操舵応答性を確保できる。
【0131】
なお、図16に示すフローチャート(条件変更処理)及び図11に示すフローチャート(キャンバ角調整処理)において、請求項8記載の状態量取得手段としてはS31,S32(図10参照),S41,S42,S43(図11参照)の処理が、状態量判断手段としてはS44,S45,S46(図11参照)の処理が、第2キャンバ角調整手段としてはS48,S51(図11参照)の処理が、傾斜角度取得手段としては、S61(図16参照)の処理が、第2条件変更手段としてはS62(図16参照)の処理がそれぞれ該当する。
【0132】
以上、実施の形態に基づき本発明を説明したが、本発明は上記実施の形態に何ら限定されるものではなく、本発明の趣旨を逸脱しない範囲内で種々の改良変形が可能であることは容易に推察できるものである。
【0133】
上記各実施の形態で挙げた数値は一例であり、他の数値を採用することは当然可能である。例えば、上記各実施の形態で説明した第1キャンバ角および第2キャンバ角の値は任意に設定することができる。
【0134】
上記各実施の形態では、後輪2RL,2RRのキャンバ角を調整可能に構成される車両1、前輪2FL,2FRのキャンバ角を調整可能に構成される車両201に車両用制御装置が搭載される場合について説明したが、必ずしもこれらに限られるものではなく、車両用制御装置は、前輪2FL,2FR及び後輪2RL,2RRの両方のキャンバ角を調整可能に構成される車両に搭載される場合もある。この場合は、各状態量の大きさや変化量に基づいて、状態量や変化量が小さな場合は後輪2RL,2RRにネガティブキャンバを付与し、状態量や変化量が大きな場合は前輪2FL,2FRにポジティブキャンバを付与すると共に、後輪2RL,2RRにネガティブキャンバを付与するようにすることが可能である。
【0135】
上記各実施の形態では、車両用制御装置100,200が適用される車両1,201が前輪駆動方式である場合について説明したが、これらに限定されるものでははく、後輪駆動方式の車両や4輪駆動方式の車両に適用することも可能である。
【0136】
上記各実施の形態では、車輪2のキャンバ角は、キャンバ角調整装置44により第1キャンバ角または第2キャンバ角に調整され、車両1,201が通常走行をするときは、車輪2が第2キャンバ角に設定される場合について説明した。即ち、車両1,201が通常走行をするときのキャンバ角の所定角と、第2キャンバ角とが同一の場合を説明したが、必ずしもこれに限られるものではない。懸架装置およびキャンバ角調整装置が、車輪2のキャンバ角を任意の角度に調整可能な場合は、車輪2のキャンバ角(第2キャンバ角)を第1キャンバ角よりも所定角(車両1,201が通常走行をするときのキャンバ角)に近い角度に調整することが可能である。この場合は、車両1,201が通常走行をするときのキャンバ角の所定角と、第2キャンバ角とは同一でないが、車輪2のキャンバ角が第2キャンバ角に調整されることで、キャンバスラストを減少させて操舵応答性を確保できる。また、懸架装置およびキャンバ角調整装置が、車輪2のキャンバ角を任意の角度に調整可能に構成される場合は、現在のスタビリティファクタが基準スタビリティファクタと一致するように、車輪2のキャンバ角を細かく制御することも可能である。
【0137】
上記第1実施の形態では、加速度センサ装置80から入力される前後加速度に基づいて車両1の傾斜角度θを取得する場合について説明したが、必ずしもこれに限られるものではなく、ナビゲーション装置82から入力される情報に基づいて車両1の傾斜角度を取得することが可能である。ナビゲーション装置82から入力される情報(路面の傾斜角度)に基づいて、路面の傾斜角度に基づいてその路面を走行する車両1の傾斜角度θを推定できるからである。また、第5実施の形態で説明したように、傾斜センサ装置85から入力される情報に基づいて車両1の傾斜角度θを取得することも可能である。
【0138】
また、上記第1実施の形態では、車両1の傾斜角度θに基づいて軸重Wf,Wrを取得する場合について説明したが、必ずしもこれに限られるものではなく、サスストロークセンサ装置83や接地荷重センサ装置84から入力される情報に基づいて、傾斜角度θを取得することなく軸重Wf,Wrを取得することも可能である。同様に第3実施の形態においても、ハイトセンサ装置86から入力される情報に代えて、サスストロークセンサ装置83や接地荷重センサ装置84から入力される情報に基づいて、軸重Wf,Wrを取得することが可能である。
【0139】
上記第3実施の形態および第5実施の形態では、ステアリング63による操舵角、操舵角速度および横加速度に基づいて、車両1の状態量が所定の条件を満たすか否かを判断する場合を説明したが、必ずしもこれに限られるものではなく、他の状態量に基づいて車両1の状態量が所定の条件を満たすか否かを判断することは当然可能である。他の状態量としては、例えば、アクセルペダル61の操作量、ブレーキペダル62の操作量や操作速度のように、運転者により操作される操作部材の状態を示すものでも良く、或いは、車両1自体の状態を示すものでも良い。車両1自体の状態を示すものとしては、車両1の前後加速度、ヨーレート、ロール角などが例示される。
【0140】
また、上記第3実施の形態および第5実施の形態では、車両1の状態量が所定の条件を満たすか否かを判断する状態量判断処理において、ステアリング63による操舵角、操舵角速度および横加速度が所定の閾値以上であるか否かを判断するための判断基準を、車輪2のキャンバ角が第2キャンバ角の状態で車両1が旋回する場合に、車輪2がスリップするおそれがあると判断される限界値とする場合を説明したが、必ずしもこれに限られるものではなく、例えば、単に車両1の状態量(例えば、各ペダル61,62の操作量やステアリング63の操作量など)に基づいて設定しても良い。
【0141】
上記各実施の形態では、前輪2FL,2FR及び後輪2RL,2RRの軸重Wf,Wrに基づいてスタビリティファクタを算出する場合について説明したが、必ずしもこれに限られるものではなく、サスストロークセンサ装置83、接地荷重センサ装置84、ハイトセンサ装置86から入力される情報に基づいて前輪2FL,2FR及び後輪2RL,2RRの輪荷重を各々求め、以下の式(5)に基づいてスタビリティファクタを算出することもできる。
【0142】
【数4】
【0143】
但し、Aはスタビリティファクタ、mは車両の質量、lfは前軸と重心Gとの距離、lrは後軸と重心Gとの距離、Lは車両のホイールベース(L=lf+lr)、KFRは右前輪のコーナリングパワー、KFLは左前輪のコーナリングパワー、KRRは右後輪のコーナリングパワー、KRLは左後輪のコーナリングパワーである。
【0144】
また、上記各実施の形態では、前輪2FL,2FR、後輪2RL,2RRについて左右の車輪2のキャンバ角を調整する場合について説明したが、必ずしもこれに限られるものではなく、車両1が旋回するときに前輪2FL,2FR、後輪2RL,2RRの旋回外輪のキャンバ角を調整するようにすることも可能である。
【0145】
上記各実施の形態では、演算されたスタビリティファクタとROM72に記憶された基準スタビリティファクタとを比較する場合について説明したが、必ずしもこれに限られるものではない。例えば、走行中の車両1,201のスタビリティファクタのうち、平坦路(水平面)を走行していると判断されるときのスタビリティファクタを基準スタビリティファクタとしてRAM73に記憶しておき、RAM73に記憶された基準スタビリティファクタと、走行中のスタビリティファクタとを比較することも可能である。これにより、異なる種類の車輪2に取り替えたり車輪2の空気圧等が変化したりしても、走行中の車両1,201にあわせた基準スタビリティファクタを設定できる。その結果、車両1,201の旋回特性に応じて車輪2のキャンバ角の調整を最適に行うことができる。
【0146】
上記各実施の形態においては、スタビリティファクタと基準スタビリティファクタとを比較して、スタビリティファクタが基準スタビリティファクタより小さいと判断される場合に、スタビリティファクタが大きくなるように車輪2のキャンバ角を制御する場合について説明したが、必ずしもこれに限られるものではない。スタビリティファクタと基準スタビリティファクタとを比較して、スタビリティファクタが基準スタビリティファクタより大きいと判断される場合に、スタビリティファクタが基準スタビリティファクタに近づくように(スタビリティファクタが小さくなるように)車輪2のキャンバ角を調整することも可能である。この場合は、車両1,201のアンダーステア傾向を弱めるように旋回特性を調整することができ、車両1,201の操舵応答性を確保できる。
【0147】
上記第3実施の形態および第5実施の形態では、スタビリティファクタAや傾斜角度θと各閾値との関係を規定した閾値関数に基づいて各閾値を求める場合について説明したが、必ずしもこれに限られるものではなく、スタビリティファクタAや傾斜角度θに対する各閾値を規定したマップに基づいて各閾値を求めるようにすることも可能である。
【符号の説明】
【0148】
100,110,200 車両用制御装置
1,201 車両
2 車輪
2FL,2FR 前輪
2RL,2RR 後輪
44 キャンバ角調整装置
44FL FLモータ(キャンバ角調整装置の一部)
44FR FRモータ(キャンバ角調整装置の一部)
44RL RLモータ(キャンバ角調整装置の一部)
44RR RRモータ(キャンバ角調整装置の一部)
BF 車体の一部
【特許請求の範囲】
【請求項1】
車体と、その車体を支持する前輪および後輪と、それら前輪および後輪の少なくとも一つのキャンバ角を調整するキャンバ角調整装置と、を備えた車両に用いられる車両用制御装置であって、
車両の状態量を取得する状態量取得手段と、
その状態量取得手段により取得される前記車両の状態量に基づいて前記車両のスタビリティファクタを演算するスタビリティファクタ演算手段と、
そのスタビリティファクタ演算手段により演算される前記車両のスタビリティファクタと別途定める基準スタビリティファクタとを比較する比較手段と、
その比較手段による比較結果に基づいて前記キャンバ角調整装置により前記前輪および後輪の少なくとも一つのキャンバ角を調整する第1キャンバ角調整手段と、を備えていることを特徴とする車両用制御装置。
【請求項2】
前記比較手段による比較結果は、前記車両のスタビリティファクタと前記基準スタビリティファクタとの偏差であり、
その偏差が小さくなるように、前記第1キャンバ角調整手段は、前記キャンバ角調整装置により車輪のキャンバ角を調整することを特徴とする請求項1記載の車両用制御装置。
【請求項3】
前記第1キャンバ角調整手段は、前記比較手段により前記車両のスタビリティファクタが前記基準スタビリティファクタより小さいと判断される場合に前記キャンバ角調整装置により車輪のキャンバ角を調整することを特徴とする請求項1又は2に記載の車両用制御装置。
【請求項4】
車体と、その車体を支持する前輪および後輪と、それら前輪および後輪の少なくとも一つのキャンバ角を調整するキャンバ角調整装置と、を備えた車両に用いられる車両用制御装置であって、
車両の状態量を取得する状態量取得手段と、
その状態量取得手段により取得される前記車両の状態量が所定の条件を満たすかを判断する状態量判断手段と、
その状態量判断手段により前記車両の状態量が所定の条件を満たすと判断される場合に、前記キャンバ角調整装置により前記前輪および後輪の少なくとも一つのキャンバ角を調整する第2キャンバ角調整手段と、
前記状態量取得手段により取得される前記車両の状態量に基づいて前記車両のスタビリティファクタを演算するスタビリティファクタ演算手段と、
そのスタビリティファクタ演算手段により演算される前記車両のスタビリティファクタに基づいて前記所定の条件を変更する第1条件変更手段と、を備えていることを特徴とする車両用制御装置。
【請求項5】
前記スタビリティファクタ演算手段により演算される前記車両のスタビリティファクタと別途定める基準スタビリティファクタとを比較する比較手段を備え、
前記第1条件変更手段は、前記比較手段により前記車両のスタビリティファクタが前記基準スタビリティファクタより小さいと判断される場合に、前記所定の条件を変更することを特徴とする請求項4記載の車両用制御装置。
【請求項6】
前記状態量取得手段は、前記前輪および後輪の輪荷重に関する情報を取得する輪荷重情報取得手段を備えていることを特徴とする請求項1から5のいずれかに記載の車両用制御装置。
【請求項7】
前記基準スタビリティファクタは、前記車両が水平面を一定の速度で走行するときの値に設定されていることを特徴とする請求項1から6のいずれかに記載の車両用制御装置。
【請求項8】
車体と、その車体を支持する前輪および後輪と、それら前輪および後輪の少なくとも一つのキャンバ角を調整するキャンバ角調整装置と、を備えた車両に用いられる車両用制御装置であって、
車両の状態量を取得する状態量取得手段と、
その状態量取得手段により取得される前記車両の状態量が所定の条件を満たすかを判断する状態量判断手段と、
その状態量判断手段により前記車両の状態量が所定の条件を満たすと判断される場合に、前記キャンバ角調整装置により前記前輪および後輪の少なくとも一つのキャンバ角を調整する第2キャンバ角調整手段と、
前記車両の進行方向において水平面に対する前記車両の傾斜角度を取得する傾斜角度取得手段と、
その傾斜角度取得手段により取得される前記車両の傾斜角度に基づいて前記所定の条件を変更する第2条件変更手段と、を備えていることを特徴とする車両用制御装置。
【請求項9】
前記第2条件変更手段は、前記傾斜角度取得手段により取得される前記車両の傾斜角度が、前記車両が降坂路を走行するものに相当すると判断される場合に、前記所定の条件を変更することを特徴とする請求項8記載の車両用制御装置。
【請求項10】
前記キャンバ角調整装置は、前記後輪のキャンバ角を調整するものであり、
前記第1キャンバ角調整手段または前記第2キャンバ角調整手段は、前記キャンバ角調整装置により前記後輪のキャンバ角をマイナス方向に調整して前記後輪にネガティブキャンバを付与するものであることを特徴とする請求項1から9のいずれかに記載の車両用制御装置。
【請求項1】
車体と、その車体を支持する前輪および後輪と、それら前輪および後輪の少なくとも一つのキャンバ角を調整するキャンバ角調整装置と、を備えた車両に用いられる車両用制御装置であって、
車両の状態量を取得する状態量取得手段と、
その状態量取得手段により取得される前記車両の状態量に基づいて前記車両のスタビリティファクタを演算するスタビリティファクタ演算手段と、
そのスタビリティファクタ演算手段により演算される前記車両のスタビリティファクタと別途定める基準スタビリティファクタとを比較する比較手段と、
その比較手段による比較結果に基づいて前記キャンバ角調整装置により前記前輪および後輪の少なくとも一つのキャンバ角を調整する第1キャンバ角調整手段と、を備えていることを特徴とする車両用制御装置。
【請求項2】
前記比較手段による比較結果は、前記車両のスタビリティファクタと前記基準スタビリティファクタとの偏差であり、
その偏差が小さくなるように、前記第1キャンバ角調整手段は、前記キャンバ角調整装置により車輪のキャンバ角を調整することを特徴とする請求項1記載の車両用制御装置。
【請求項3】
前記第1キャンバ角調整手段は、前記比較手段により前記車両のスタビリティファクタが前記基準スタビリティファクタより小さいと判断される場合に前記キャンバ角調整装置により車輪のキャンバ角を調整することを特徴とする請求項1又は2に記載の車両用制御装置。
【請求項4】
車体と、その車体を支持する前輪および後輪と、それら前輪および後輪の少なくとも一つのキャンバ角を調整するキャンバ角調整装置と、を備えた車両に用いられる車両用制御装置であって、
車両の状態量を取得する状態量取得手段と、
その状態量取得手段により取得される前記車両の状態量が所定の条件を満たすかを判断する状態量判断手段と、
その状態量判断手段により前記車両の状態量が所定の条件を満たすと判断される場合に、前記キャンバ角調整装置により前記前輪および後輪の少なくとも一つのキャンバ角を調整する第2キャンバ角調整手段と、
前記状態量取得手段により取得される前記車両の状態量に基づいて前記車両のスタビリティファクタを演算するスタビリティファクタ演算手段と、
そのスタビリティファクタ演算手段により演算される前記車両のスタビリティファクタに基づいて前記所定の条件を変更する第1条件変更手段と、を備えていることを特徴とする車両用制御装置。
【請求項5】
前記スタビリティファクタ演算手段により演算される前記車両のスタビリティファクタと別途定める基準スタビリティファクタとを比較する比較手段を備え、
前記第1条件変更手段は、前記比較手段により前記車両のスタビリティファクタが前記基準スタビリティファクタより小さいと判断される場合に、前記所定の条件を変更することを特徴とする請求項4記載の車両用制御装置。
【請求項6】
前記状態量取得手段は、前記前輪および後輪の輪荷重に関する情報を取得する輪荷重情報取得手段を備えていることを特徴とする請求項1から5のいずれかに記載の車両用制御装置。
【請求項7】
前記基準スタビリティファクタは、前記車両が水平面を一定の速度で走行するときの値に設定されていることを特徴とする請求項1から6のいずれかに記載の車両用制御装置。
【請求項8】
車体と、その車体を支持する前輪および後輪と、それら前輪および後輪の少なくとも一つのキャンバ角を調整するキャンバ角調整装置と、を備えた車両に用いられる車両用制御装置であって、
車両の状態量を取得する状態量取得手段と、
その状態量取得手段により取得される前記車両の状態量が所定の条件を満たすかを判断する状態量判断手段と、
その状態量判断手段により前記車両の状態量が所定の条件を満たすと判断される場合に、前記キャンバ角調整装置により前記前輪および後輪の少なくとも一つのキャンバ角を調整する第2キャンバ角調整手段と、
前記車両の進行方向において水平面に対する前記車両の傾斜角度を取得する傾斜角度取得手段と、
その傾斜角度取得手段により取得される前記車両の傾斜角度に基づいて前記所定の条件を変更する第2条件変更手段と、を備えていることを特徴とする車両用制御装置。
【請求項9】
前記第2条件変更手段は、前記傾斜角度取得手段により取得される前記車両の傾斜角度が、前記車両が降坂路を走行するものに相当すると判断される場合に、前記所定の条件を変更することを特徴とする請求項8記載の車両用制御装置。
【請求項10】
前記キャンバ角調整装置は、前記後輪のキャンバ角を調整するものであり、
前記第1キャンバ角調整手段または前記第2キャンバ角調整手段は、前記キャンバ角調整装置により前記後輪のキャンバ角をマイナス方向に調整して前記後輪にネガティブキャンバを付与するものであることを特徴とする請求項1から9のいずれかに記載の車両用制御装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【公開番号】特開2011−251592(P2011−251592A)
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願番号】特願2010−125345(P2010−125345)
【出願日】平成22年5月31日(2010.5.31)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
【公開日】平成23年12月15日(2011.12.15)
【国際特許分類】
【出願日】平成22年5月31日(2010.5.31)
【出願人】(591261509)株式会社エクォス・リサーチ (1,360)
【Fターム(参考)】
[ Back to top ]