
車両用制御装置
【課題】従来と比較して内燃機関の停止前や再始動時の排気エミッションを向上させることができる車両用制御装置を提供する。
【解決手段】動力源としてエンジンおよびモータジェネレータと、エンジンの排気通路上に設けられた三元触媒と、エンジンを間欠停止する際に、エンジンを予め定められた回転数で自立運転させた後に間欠停止させるよう制御するエンジンECUとを備えたハイブリッド車両に用いられる車両用制御装置であって、エンジンECUが、エンジンを間欠停止する際、エンジンの吸気通路壁面に付着した付着燃料がなくなるまで自立運転を継続させるようにした。
【解決手段】動力源としてエンジンおよびモータジェネレータと、エンジンの排気通路上に設けられた三元触媒と、エンジンを間欠停止する際に、エンジンを予め定められた回転数で自立運転させた後に間欠停止させるよう制御するエンジンECUとを備えたハイブリッド車両に用いられる車両用制御装置であって、エンジンECUが、エンジンを間欠停止する際、エンジンの吸気通路壁面に付着した付着燃料がなくなるまで自立運転を継続させるようにした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、内燃機関および電動機を駆動源として備えたハイブリッド車両に搭載される車両用制御装置に関する。
【背景技術】
【0002】
一般に、ハイブリッド車両では、車両停止時にユーザの操作によって内燃機関の停止および始動を行う通常運転の他に、燃費向上や大気環境保全のために車両走行中に車両状態に応じて内燃機関の停止および始動を行う間欠運転が行われる。
【0003】
ところで、内燃機関の再始動時は、始動性や排気エミッションの排出抑制などを考慮して、適正な燃料噴射量を決定する必要がある。また、内燃機関の再始動時における適正な燃料噴射量を決定するには、内燃機関の停止時あるいは停止中に吸気通路壁面に付着した燃料を加味することが望ましい。
【0004】
従来、内燃機関の再始動時における燃料噴射量を適正に決定し得る車両用制御装置として、例えば特許文献1に記載された車両用制御装置が知られている。特許文献1に記載の車両用制御装置は、ハイブリッド車両に搭載され、内燃機関の停止直後に電動機によるモータリングを実行することにより、吸気通路内に発生する空気の流れによって吸気通路壁面に付着している燃料を強制的に離脱させて実際の燃料付着量をゼロにするようになっている。この従来の車両用制御装置によれば、内燃機関の再始動時、燃料付着量推定手段により推定される燃料付着量の初期値をゼロに設定した状態で燃料付着量の推定を開始することができる。したがって、内燃機関の再始動時の燃料付着量の推定値と実際値とを一致させることができ、内燃機関の再始動時における燃料噴射量を適正な量となるよう決定することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−144030号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の従来の車両用制御装置において、内燃機関の停止直後に実行されるモータリング中は、燃料噴射や点火も行われないため、吸気通路から導入された空気すなわち新気がそのまま触媒に導入されることとなる。このため、触媒内が新気で満たされ、触媒内の空燃比がリーンとなってしまう。したがって、排気浄化装置の排気浄化性能が低下し、次回再始動時の排気エミッションが悪化するという問題があった。
【0007】
また、従来の車両用制御装置にあっては、上記モータリングによって発生する空気の流れにより、吸気通路壁面に付着していた燃料が燃焼されることなく、そのまま触媒に導入され、場合によっては外部に排出されるおそれがある。このような場合には、内燃機関のモータリング中における排気エミッションが悪化するという問題があった。
【0008】
特に、タンブル流を形成するべく吸気ポートに屈曲部を設けた構造の内燃機関にあっては、インジェクタから噴霧された多くの燃料が屈曲部に付着し易いため、上記のような問題が特に顕著である。
【0009】
本発明は、上述のような従来の問題を解決するためになされたもので、従来と比較して内燃機関の停止前や再始動時の排気エミッションを向上させることができる車両用制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に係る車両用制御装置は、上記目的達成のため、(1)車両の駆動力を発生する動力源として内燃機関および電動機と、前記内燃機関の排気通路上に設けられた触媒と、前記内燃機関を停止する際に、前記内燃機関を予め定められた回転数で自立運転させた後に停止させるよう制御する制御手段とを備えたハイブリッド車両に用いられる車両用制御装置であって、前記制御手段は、前記内燃機関を停止する際、前記内燃機関の吸気通路壁面に付着した付着燃料がなくなるまで前記自立運転を継続させる構成を有する。
【0011】
この構成により、本発明に係る車両用制御装置は、内燃機関を停止する際、制御手段が内燃機関の吸気通路壁面に付着した付着燃料がなくなるまで内燃機関の自立運転を継続させる。このため、例えば付着燃料の影響によって空燃比がリッチとなったり、あるいは新気によって空燃比がリーンとなるなど、触媒内の空燃比が不安定な状態となることが無く、従来と比較して内燃機関の次回再始動時の排気エミッションを向上させることができる。
【0012】
また、本発明に係る車両用制御装置は、吸気通路壁面に付着した付着燃料がなくなるまで内燃機関の自立運転を継続するので、付着燃料が燃焼されることなく、そのまま触媒に導入され、外部に排出されることを防止することができる。したがって、従来と比較して内燃機関の停止前の排気エミッションを向上させることができる。
【0013】
また、本発明に係る車両用制御装置は、上記(1)に記載の車両用制御装置において、(2)前記触媒の空燃比を検出する空燃比検出手段を備え、前記制御手段は、前記空燃比検出手段の出力値が目標空燃比よりもリッチな空燃比と前記目標空燃比よりもリーンな空燃比との間で反転した反転回数が予め定められた判定回数以上となるまで前記自立運転を継続させる構成を有する。
【0014】
この構成により、本発明に係る車両用制御装置は、空燃比検出手段の出力値が目標空燃比に対してリッチおよびリーンの間で反転した反転回数が予め定められた判定回数以上となることにより、触媒の空燃比が目標空燃比付近に収束していると判断することができる。このため、触媒の空燃比の目標空燃比付近への収束に基づき、吸気通路壁面に付着した付着燃料がなくなったと判断することができる。したがって、本発明に係る車両用制御装置は、実際に付着燃料がなくなるまで内燃機関の自立運転を継続させることができる。
【0015】
また、本発明に係る車両用制御装置は、上記(1)に記載の車両用制御装置において、(3)前記制御手段は、前記目標空燃比が得られるよう算出された最終噴射量から基本自立運転時間を求め、前記基本自立運転時間に所定の係数を乗ずることにより前記付着燃料がなくなるまでの時間として自立運転継続時間を算出し、前記自立運転継続時間が経過するまで前記自立運転を継続させる構成を有する。
【0016】
この構成により、本発明に係る車両用制御装置は、例えば冷却水温が空燃比フィードバック制御開始水温に達していない場合や空燃比フィードバック制御の開始までに時間を要する場合などのように空燃比の検出値を用いることができない状況下であっても、付着燃料がなくなるまでの時間として自立運転継続時間を算出することができる。したがって、本発明に係る車両用制御装置は、空燃比フィードバック制御の開始の有無に関わらず自立運転継続時間が経過するまで内燃機関の自立運転を継続させることができる。
【0017】
また、本発明に係る車両用制御装置は、例えば最終噴射量が多い場合には付着燃料も多いと判断して自立運転継続時間を長くするなど、付着燃料の量に基づき最適な自立運転継続時間を算出することができる。
【0018】
また、本発明に係る車両用制御装置は、上記(3)に記載の車両用制御装置において、(4)前記所定の係数は、前記内燃機関の冷却水温に基づき決定される。
【0019】
この構成により、本発明に係る車両用制御装置は、例えば冷却水温が低い場合には付着燃料が気化しづらいと判断して自立運転継続時間を長くするなど、付着燃料の量に基づき最適な自立運転継続時間を算出することができる。
【発明の効果】
【0020】
本発明によれば、従来と比較して内燃機関の停止前や再始動時の排気エミッションを向上させることができる車両用制御装置を提供することができる。
【図面の簡単な説明】
【0021】
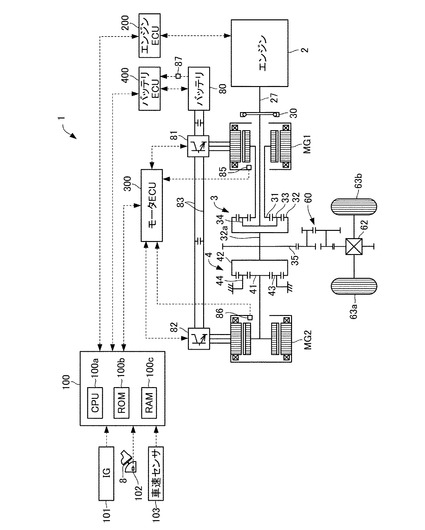
【図1】本発明の第1の実施の形態に係る車両用制御装置が適用されるハイブリッド車両の概略構成図である。
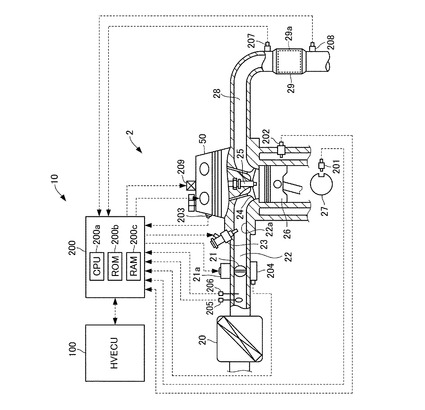
【図2】本発明の第1の実施の形態に係るエンジンの概略構成図である。
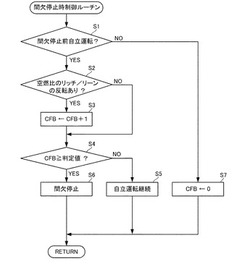
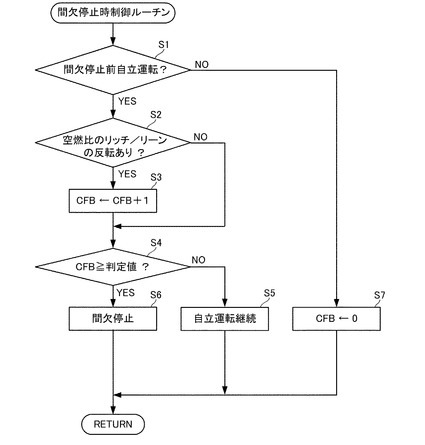
【図3】本発明の第1の実施の形態に係るエンジンECUで実行される間欠停止時制御ルーチンの一例を示すフローチャートである。
【図4】本発明の第2の実施の形態に係るエンジンECUで実行されるエンジンの間欠停止時制御ルーチンの一例を示すフローチャートである。
【図5】最終噴射量TAUと基本自立運転時間Tbとの関係を示すマップである。
【図6】冷却水温TwとWET係数との関係を示すマップである。
【発明を実施するための形態】
【0022】
以下、本発明の実施の形態について、図面を参照して説明する。
【0023】
(第1の実施の形態)
図1〜図3を参照して、本発明の第1の実施の形態に係る車両用制御装置について説明する。本実施の形態に係る車両用制御装置は、車両の駆動力を発生する動力源として内燃機関および電動機を搭載した車両、いわゆるハイブリッド車両に用いられる。
【0024】
図1に示すように、ハイブリッド車両1は、エンジン2と、動力分配統合機構3と、モータジェネレータMG1、MG2と、減速ギヤ4と、車両用制御装置10(図2参照)とを含んで構成されている。図2に示す車両用制御装置10は、エンジン用電子制御装置(以下、単にエンジンECUという)200と、O2センサ208とを含んで構成されている。
【0025】
エンジン2は、例えばガソリンまたは軽油などの炭化水素系の燃料により動力を出力可能な内燃機関として構成されている。エンジン2は、図2に示すように、エアクリーナ20により清浄された空気をスロットルバルブ21および吸気通路22を介して吸入する。その後、エンジン2は、燃料噴射弁23からガソリンを噴射して吸入された空気とガソリンとを混合し、この混合気を吸気バルブ24を介して燃料室に吸入する。
【0026】
次いで、エンジン2は、吸入した混合気を点火プラグ25による電気火花によって爆発燃焼させて、そのエネルギにより押し下げられるピストン26の往復運動をクランクシャフト27の回転運動に変換する。
【0027】
エンジン2の排気通路28上には、一酸化炭素(CO)や炭化水素(HC)、窒素酸化物(NOx)の有害成分を浄化する排ガス浄化触媒(以下、三元触媒という)29aを含む浄化装置29が設けられている。したがって、エンジン2からの排気は、浄化装置29を介して外気へ排出される。本実施の形態における三元触媒29aは、本発明に係る触媒を構成する。
【0028】
三元触媒29aは、同触媒に導入される排気ガスの空燃比(A/F)が略理論空燃比のとき、排気ガス中の未燃成分(HC、CO)を酸化し、同時にNOxを還元する機能により排気ガスを浄化する。具体的には、三元触媒29aは、酸素を吸蔵(貯蔵)する酸素吸蔵機能を有しており、導入される排気ガスの空燃比がリッチである場合には吸蔵している酸素にて未燃HC、CO等の未燃成分を酸化する(酸素を放出する)。一方、三元触媒29aに導入される排気ガスの空燃比がリーンである場合には排気ガス中の酸素およびNOxを還元することで得られる酸素を内部に吸蔵する。このようにして、三元触媒29aは、エンジン2の燃焼室から排出される排気ガス中の未燃HC、COやNOxを効果的に浄化することができる。
【0029】
このような三元触媒29aの浄化特性は、エンジン2の燃焼状態を示す空燃比に依存し、その空燃比が理論空燃比近傍であるときに三元触媒29aは最も有効に機能する。このような点から、エンジン2においては、三元触媒29aの上流側および下流側にそれぞれ設けられた空燃比センサの各出力値に基づいて、空燃比(実空燃比)が理論空燃比に一致するように後述する空燃比フィードバック制御がエンジンECU200により実行されている。本実施の形態では、前述の空燃比センサとして、三元触媒29aの上流側にA/Fセンサ207を配置し、三元触媒29aの下流側にO2センサ208を配置した。
【0030】
A/Fセンサ207は、空燃比に比例した出力特性を有し、比較的広範囲にわたる空燃比を連続的に検出可能である。一方、O2センサ208は、理論空燃比を境に出力値が急変する特性(Z特性)を有し、排気ガス中の酸素濃度を起電力におきかえ、空燃比が理論空燃比に対してリーンかリッチかを検出するものである。なお、三元触媒29aの上流側に設けられる空燃比センサとしては、空燃比に対してリニアな特性を有するA/Fセンサに代えて、O2センサを用いてもよい。本実施の形態におけるA/Fセンサ207は、本発明に係る空燃比検出手段を構成する。
【0031】
また、エンジン2は、吸気バルブ24の開閉タイミングVTを連続的に変更可能な可変バルブタイミング機構50を備える。可変バルブタイミング機構50は、図示しないベーン式のVVTコントローラと、オイルコントロールバルブとを備え、吸気バルブ24の開閉タイミングVTにおけるインテークカムシャフト(図示せず)の角度を連続的に変更する。
【0032】
また、エンジン2は、エンジンECU200によって制御されるようになっている。エンジンECU200は、CPU200aを中心とするマイクロプロセッサとして構成されており、処理プログラムを記憶するROM200bと、データを一時的に記憶するRAM200cと、図示しない入出力ポートおよび通信ポートとを備えている。
【0033】
エンジンECU200には、クランクポジションセンサ201、水温センサ202、カムポジションセンサ203、スロットルバルブポジションセンサ204、エアフローメータ205、温度センサ206、A/Fセンサ207、O2センサ208が接続されている。
【0034】
クランクポジションセンサ201は、クランクシャフト27の回転位置すなわちクランク角θcrやエンジン回転数Neを検出する。水温センサ202は、エンジン2の冷却水の温度すなわち冷却水温Twを検出する。カムポジションセンサ203は、インテークカムシャフト28や排気バルブを開閉するエキゾーストカムシャフトの回転位置すなわちカム角θcaを検出する。スロットルバルブポジションセンサ204は、スロットルバルブ21のスロットル開度THを検出する。エアフローメータ205は、吸気管に取り付けられ、吸入空気の質量流量すなわち吸入空気量Qaを検出する。温度センサ206は、吸気管に取り付けられ、吸気温Taを検出する。A/Fセンサ207およびO2センサ208は、上述した通りである。これら各センサは、検出結果に応じた信号をエンジンECU200に出力する。
【0035】
エンジンECU200は、エンジン2を駆動するための種々の制御信号、例えば燃料噴射弁23への駆動信号や、スロットル開度THを調節するスロットルモータ21aへの駆動信号、イグニッションコイル209への制御信号、可変バルブタイミング機構50への制御信号などを出力ポートを介して出力するようになっている。
【0036】
エンジンECU200は、ハイブリッド用電子制御装置(以下、単にHVECUという)100と通信しており、HVECU100からの制御信号によりエンジン2を運転制御するとともに、必要に応じてエンジン2の運転状態に関するデータを出力する。
【0037】
また、エンジンECU200は、排気エミッションを低減させるために、混合気の空燃比が理論空燃比となるように燃料噴射量を制御する、空燃比フィードバック制御を実行するようになっている。この空燃比フィードバック制御は、所定の開始条件が成立したことを条件に実行される。所定の開始条件としては、水温センサ202により検出された冷却水温Twが所定温度以上であること、エンジン始動中でないこと、エンジン始動後の燃料増量中でないなどの複数の条件が挙げられ、これら条件すべてを満足するときに所定の開始条件が成立したものと判定される。
【0038】
例えば、この空燃比フィードバック制御では、A/Fセンサ207の検出結果から気筒内の混合気の空燃比を把握し、現状の負荷状態で要求される空燃比へと補正するための第1補正係数を演算して、第1補正係数に基づいて燃料噴射弁23からの燃料噴射量を調整するメインF/B制御が実行される。さらに、メインF/B制御に加えて、O2センサ208の検出結果に基づいて第2補正係数を演算し、メインF/B制御にて得られた第1補正係数を修正するサブF/B制御が実行される。このようなサブF/B制御を実行することにより、A/Fセンサ207の出力特性のバラツキに基づく空燃比の誤差を、充分に撹拌されて酸素濃度が平衡状態となった三元触媒29aの下流の排気ガスからO2センサ208が検出した空燃比に基づいて修正可能である。これにより、空燃比フィードバック制御の精度をより向上させることができる。
【0039】
また、図1に示すように、エンジンECU200は、ハイブリッド車両1の走行中に、車両状態に応じてエンジン2の運転を停止(以下、このような運転停止を間欠停止という)するようになっている。このエンジン2の間欠停止は、後述する間欠停止時制御ルーチンにしたがって実行されるものであり、例えば車速Vがエンジン2を停止してもよい閾値未満の状態でアクセル開度Accや車速V、バッテリ80の状態からハイブリッド車両1に要求される車両要求パワーが閾値未満となり、他にエンジン2の運転を継続する要求がないときに実行される。例えば、車速Vが閾値未満(例えば、V<50km/h)であるときにアクセルOFF(Acc=0%)され、かつバッテリ80の残容量(SOC)低下により間欠停止が禁止されていない状態である場合に、エンジン2の間欠停止が行われる。ここで、エンジン2の間欠停止を実行する上述したような条件を、以下、間欠停止条件という。
【0040】
さらに、エンジンECU200は、エンジン2を間欠停止する際に、エンジン2を予め定められた所定の回転数Nstopで自立運転させた後に停止させるよう制御するようになっている。自立運転とは、電動機(例えば、MG1)からのトルクなしでエンジン2が回転を継続できる運転状態にあることをいう。また、所定の回転数Nstopは、エンジン2を安定して運転することができる回転数範囲のうちの低回転数領域で設定されるものであり、例えば900rpmや1000rpmなどの回転数を用いることができる。
【0041】
また、エンジンECU200は、上述の間欠停止時、エンジン2の吸気通路22の吸気通路壁面22a(図2参照)に付着した付着燃料がなくなる、すなわち付着燃料が完全になくなるか、あるいは空燃比に影響を与えないほど微小になるまでの間、上述の自立運転を継続させるようになっている。付着燃料がなくなったか否かの判断は、A/Fセンサ207の出力値が目標空燃比よりもリッチな空燃比と同目標空燃比よりもリーンな空燃比との間で反転した反転回数が予め定められた判定回数(例えば、2回)以上となったか否かにより行う。前述の反転回数は、フィードバックカウント値(CFB)としてRAM200cに逐次記憶される。また、前述の判定回数は、判定値としてROM200bに予め記憶されている。
【0042】
ここで、本実施の形態では、上述の目標空燃比は、例えば理論空燃比であるが、エンジン2の運転状態に応じて適宜設定されてもよいし、理論空燃比近傍のように一定の幅を持たせてもよい。なお、付着燃料がなくなったか否かの判断に用いられる判定回数は、2回に限らず、例えば3回、4回など少なくとも2回以上の回数であればいずれの回数を設定してもよい。ただし、燃費を考慮すると、上記判定回数は、できる限り少ないほうが望ましい。エンジン2の間欠停止時制御ルーチンの詳細については、後述する。
【0043】
動力分配統合機構3は、クランクシャフト27にダンパ30を介して接続された3軸式の動力分配統合機構である。動力分配統合機構3は、外歯歯車のサンギヤ31と、サンギヤ31と同心円上に配置された内歯歯車のリングギヤ32と、サンギヤ31およびリングギヤ32に噛み合う複数のピニオンギヤ33と、複数のピニオンギヤ33を自転かつ公転自在に保持するキャリア34とを備えている。つまり、動力分配統合機構3は、サンギヤ31とリングギヤ32とキャリア34とを回転要素として差動作用を行う遊星歯車機構として構成されている。
【0044】
キャリア34はクランクシャフト27に連結され、サンギヤ31はモータジェネレータMG1に連結されている。また、リングギヤ32は、リングギヤ軸32aを介して減速ギヤ4に連結されている。リングギヤ軸32aには、カウンタドライブギヤ35が連結されている。カウンタドライブギヤ35は、ギヤ機構60と噛み合っている。
【0045】
動力分配統合機構3は、モータジェネレータMG1が発電機として機能するときには、キャリア34から入力されるエンジン2からの動力をサンギヤ31側とリングギヤ32側にそのギヤ比に応じて分配する。一方、動力分配統合機構3は、モータジェネレータMG1が電動機として機能するときには、キャリア34から入力されるエンジン2からの動力とサンギヤ31から入力されるモータジェネレータMG1からの動力とを統合してリングギヤ32側に出力する。リングギヤ32に出力された動力は、カウンタドライブギヤ35からギヤ機構60およびデファレンシャルギヤ62を介して、最終的には車両の駆動輪63a、63bに出力される。
【0046】
減速ギヤ4は、モータジェネレータMG2に連結されたサンギヤ41と、サンギヤ41と同心円上に配置されたリングギヤ42と、サンギヤ41およびリングギヤ42に噛み合う複数のピニオンギヤ43と、一端が本体ケースに固定され、他端がピニオンギヤ43を自転自在に支持する支持軸を有するキャリア44とを備えている。減速ギヤ4は、サンギヤ41、リングギヤ42およびピニオンギヤ43を回転要素としてモータジェネレータMG2から伝達された回転を減速して駆動トルクを増幅する遊星歯車機構を構成している。
【0047】
減速ギヤ4は、モータジェネレータMG2が電動機として機能するときには、モータジェネレータMG2から伝達された回転を減速して駆動トルクを増幅してリングギヤ42から出力する。一方、減速ギヤ4は、リングギヤ42に入力された動力による回転を加速して駆動トルクを減衰させてサンギヤ41から出力することにより、モータジェネレータMG2を発電機として機能させる。
【0048】
モータジェネレータMG1、MG2は、供給された電力を機械的動力に変換する電動機としての機能と、入力された機械的動力を電力に変換する発電機としての機能とを兼ね備えた周知の同期発電電動機として構成されている。モータジェネレータMG1は、主に発電機として用いられ、モータジェネレータMG2は、主に電動機として用いられる。本実施の形態におけるモータジェネレータMG1、MG2は、本発明に係る電動機を構成する。
【0049】
モータジェネレータMG1、MG2は、インバータ81、82を介してバッテリ80と電力のやりとりを行う。インバータ81、82とバッテリ80とを接続する電力ライン83は、各インバータ81、82が共用する正極母線および負極母線として構成されており、モータジェネレータMG1、MG2のいずれかで発電される電力を他のモータジェネレータで消費することができるようになっている。したがって、バッテリ80は、モータジェネレータMG1、MG2のいずれかから生じた電力や不足する電力により充放電されることになる。なお、モータジェネレータMG1、MG2により電力収支のバランスをとるものとすれば、バッテリ80は充放電されない。
【0050】
モータジェネレータMG1、MG2は、いずれもモータ用電子制御装置(以下、単にモータECUという)300により駆動制御されている。モータECU300には、モータジェネレータMG1、MG2を駆動制御するために必要な信号、例えばモータジェネレータMG1、MG2の回転子の回転位置を検出する回転位置検出センサ85、86からの信号や図示しない電流センサにより検出されるモータジェネレータMG1、MG2に印加される相電流などが入力される。モータECU300からは、インバータ81、82へのスイッチング制御信号が出力されている。
【0051】
モータECU300は、HVECU100と通信しており、HVECU100からの制御信号によってモータジェネレータMG1、MG2を駆動制御するとともに必要に応じてモータジェネレータMG1、MG2の運転状態に関するデータをHVECU100に出力する。モータECU300は、回転位置検出センサ85、86からの信号に基づいてモータジェネレータMG1、MG2の回転数Nm1、Nm2を演算する。
【0052】
バッテリ80は、バッテリECU400によって管理されている。バッテリECU400には、バッテリ80を管理するのに必要な信号、例えばバッテリ80の端子間に設置された図示しない電圧センサからの端子間電圧、バッテリ80の出力端子に接続された電力ライン83に取り付けられた図示しない電流センサからの充放電電流、バッテリ80に取り付けられた温度センサ87からの電池温度Tbなどが入力される。バッテリECU400は、必要に応じてバッテリ80の状態に関するデータを通信によりHVECU100に出力する。また、バッテリECU400は、バッテリ80を管理するために電流センサにより検出された充放電電流の積算値に基づいて残容量(SOC)を演算したり、演算した残容量(SOC)と電池温度Tbとに基づいてバッテリ80を充放電してもよい最大許容電力である入出力制限Win、Woutを演算している。
【0053】
HVECU100は、CPU100aを中心とするマイクロプロセッサとして構成されており、処理プログラムを記憶するROM100bと、データを一時的に記憶するRAM100cと、図示しない入出力ポートおよび通信ポートとを備える。
【0054】
HVECU100には、イグニッションスイッチ101、アクセルペダルポジションセンサ102、車速センサ103が接続されている。イグニッションスイッチ101は、ユーザの操作に応じてイグニッション信号をHVECU100に出力する。アクセルペダルポジションセンサ102は、アクセルペダル8の操作量に基づきアクセル開度Accを検出し、アクセル開度Accに応じた信号をHVECU100に出力する。車速センサ103は、ハイブリッド車両1の車速Vを検出し、車速Vに応じた信号をHVECU100に出力する。
【0055】
HVECU100は、前述したように、エンジンECU200やモータECU300およびバッテリECU400と通信ポートを介して接続されており、エンジンECU200やモータECU300およびバッテリECU400と各種制御信号やデータのやりとりを行っている。
【0056】
次に、図3を参照して、エンジンECU200によって実行されるエンジン2の間欠停止時制御ルーチンについて、詳しく説明する。
【0057】
図3に示す間欠停止時制御ルーチンは、前述したように間欠停止条件が成立したときに実行されるものであり、所定時間毎(例えば数msec毎)に繰り返し実行される。
【0058】
図3に示すように、まず、エンジンECU200は、エンジン2の運転状態が間欠停止前の自立運転であるか否かを判断する(ステップS1)。エンジンECU200は、エンジン2の運転状態が間欠停止前の自立運転であると判断した場合には、空燃比(A/F)のリッチ/リーンの反転があるか否かを判断する(ステップS2)。具体的には、エンジンECU200は、A/Fセンサ207の出力値が目標空燃比よりもリッチな空燃比と同目標空燃比よりもリーンな空燃比との間で反転したか否かを判断する。例えば、前回ルーチンの空燃比がリッチで今回ルーチンで空燃比がリーンとなった場合、あるいはその逆の場合には、空燃比(A/F)のリッチ/リーンの反転があると判断される。A/Fセンサ207の出力値は、例えば空燃比フィードバック制御で用いられる出力値を用いることができる。
【0059】
エンジンECU200は、空燃比(A/F)のリッチ/リーンの反転ありと判断した場合には、フィードバックカウント値(CFB)をカウントアップ(CFB←CFB+1)する(ステップS3)。なお、フィードバックカウント値(CFB)の初期値は、0としている。
【0060】
一方、エンジンECU200は、空燃比(A/F)のリッチ/リーンの反転がないと判断した場合には、フィードバックカウント値(CFB)をカウントアップすることなく、ステップS4に移行する。
【0061】
次いで、エンジンECU200は、フィードバックカウント値(CFB)が予め定められた判定値(例えば、2)以上となったか否かを判断する(ステップS4)。ここで、判定値は、上述した通り、予め定められた判定回数(例えば、2回)である。
【0062】
エンジンECU200は、フィードバックカウント値(CFB)が判定値以上となっていないと判断した場合には、エンジン2の自立運転を継続して(ステップS5)、本ルーチンを終了する。つまり、フィードバックカウント値(CFB)が判定値に達していない場合には、吸気通路壁面22a(図2参照)に付着した付着燃料の影響により空燃比が目標空燃比に近づいていないと考えられることから、空燃比を目標空燃比に近づけるべくエンジン2の自立運転を継続する。なお、本ルーチンが終了した後は、所定時間間隔で次回の間欠停止時制御ルーチンが実行される。
【0063】
一方、エンジンECU200は、フィードバックカウント値(CFB)が判定値以上となったと判断した場合には、吸気通路壁面22a(図2参照)に付着した付着燃料がなくなった、すなわち付着燃料が完全になくなるか、あるいは空燃比に影響を与えないほど微小になったと考えられることから、エンジン2を間欠停止して(ステップS6)、本ルーチンを終了する。すなわち、エンジンECU200は、エンジン2への燃料供給を停止するとともに点火を停止する。これにより、エンジン2が間欠停止させられる。
【0064】
このように、本実施の形態に係る間欠停止時制御ルーチンでは、吸気通路壁面22a(図2参照)に付着した付着燃料がなくなるまでの間、エンジン2の自立運転が継続される。
【0065】
他方、ステップS1において、エンジンECU200は、エンジン2の運転状態が間欠停止前の自立運転でないと判断した場合には、フィードバックカウント値(CFB)を0にリセット(CFB←0)して(ステップS7)、本ルーチンを終了する。エンジン2の運転状態が間欠停止前の自立運転でない場合の例としては、例えば、エンジン2の自立運転中に運転者によりアクセル操作がなされ、エンジン2の始動要求が生じた場合等が挙げられる。
【0066】
以上のように、本実施の形態に係る車両用制御装置10は、エンジン2を間欠停止する際、エンジンECU200が吸気通路壁面22aに付着した付着燃料がなくなるまでエンジン2の自立運転を継続させる。このため、例えば付着燃料の影響によって空燃比がリッチとなったり、あるいは新気によって空燃比がリーンとなるなど、三元触媒29a内の空燃比が不安定な状態となることが無く、従来と比較してエンジン2の次回再始動時の排気エミッションを向上させることができる。
【0067】
また、本実施の形態に係る車両用制御装置10は、吸気通路壁面22aに付着した付着燃料がなくなるまでエンジン2の自立運転を継続するので、付着燃料が燃焼されることなく、そのまま三元触媒29aに導入され、外部に排出されることを防止することができる。したがって、従来と比較してエンジン2の間欠停止前の排気エミッションを向上させることができる。
【0068】
また、本実施の形態に係る車両用制御装置10は、A/Fセンサ207の出力値が目標空燃比に対してリッチおよびリーンの間で反転した反転回数が予め定められた判定回数以上となる、すなわちフィードバックカウント値(CFB)が判定値以上となることにより、三元触媒29aの空燃比が目標空燃比付近に収束していると判断することができる。このため、三元触媒29aの空燃比の目標空燃比付近への収束に基づき、吸気通路壁面22aに付着した付着燃料がなくなったと判断することができる。したがって、本実施の形態に係る車両用制御装置10は、実際に付着燃料がなくなるまでエンジン2の自立運転を継続させることができる。
【0069】
(第2の実施の形態)
次に、図4〜図6を参照して、本発明の第2の実施の形態に係る車両用制御装置について説明する。第1の実施の形態と同様の構成には同一の符号を付して説明を省略する。
【0070】
冷却水温Twが空燃比フィードバック制御開始水温に達していない場合や空燃比フィードバック制御の開始までに時間を要する場合などのように空燃比の検出値を用いることができない状況下、例えばA/Fセンサ207(図2参照)が活性化温度に達していないために安定した出力値を出力できないような場合等では、上述した第1の実施の形態に係る間欠停止時制御ルーチンを実行することができない。そこで、本実施の形態では、上記のような状況であっても、吸気通路壁面22a(図2参照)に付着した付着燃料がなくなるまでエンジン2の自立運転を継続して、エンジン2の次回再始動時あるいは間欠停止前の排気エミッションを向上させることができる間欠停止時制御ルーチンを実行するようにした。
【0071】
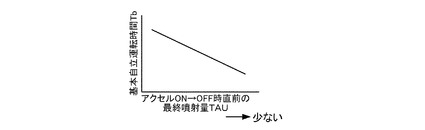
本実施の形態に係るエンジンECU200(図2参照)は、目標空燃比が得られるよう算出された最終噴射量TAUから基本自立運転時間Tbを求めるようになっている。エンジンECU200のROM200bには、最終噴射量TAUと基本自立運転時間Tbとの関係を示すマップ(図5参照)が予め実験的に求めて記憶されている。したがって、エンジンECU200は、最終噴射量TAUをパラメータとして図5に示すマップを参照することにより基本自立運転時間Tbを求める。図5に示すように、基本自立運転時間Tbは、最終噴射量TAUが少ないほど、短時間に設定されるようになっている。これは、最終噴射量TAUが少なければ、吸気通路壁面22a(図2参照)の付着燃料も少ないと考えられ、エンジン2の自立運転時間を長くしなくとも十分に付着燃料をなくすことができるからである。ここで、最終噴射量TAUは、吸入空気量Qaとエンジン回転数Neとから算出された基本噴射量Tpに、例えば吸気温補正係数や空燃比フィードバック補正係数などの各種補正係数を乗ずることにより算出される。また、本実施の形態に係る間欠停止時制御ルーチンで用いられる最終噴射量TAUは、アクセルがONからOFFに切替わる(アクセルON→OFF時)、つまりアクセルOFF(Acc=0%)とされる直前の最終噴射量である。
【0072】
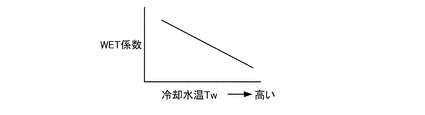
また、エンジンECU200は、上述の通り算出された基本自立運転時間Tbに、所定の係数としてWET係数を乗ずることにより、吸気通路壁面22aの付着燃料がなくなるまでの時間として自立運転継続時間Tcを算出するようになっている。エンジンECU200のROM200bには、冷却水温TwとWET係数との関係を示すマップ(図6参照)が予め実験的に求めて記憶されている。したがって、エンジンECU200は、冷却水温Twをパラメータとして図6に示すマップを参照することによりWET係数を求める。図6に示すように、WET係数は、冷却水温Twに基づき決定されるもので、冷却水温Twが高いほど小さい値として決定されるようになっている。これは、冷却水温Twが高ければ、吸気通路壁面22aの付着燃料が気化し易いため、エンジン2の自立運転時間を長くしなくとも十分に付着燃料をなくすことができるからである。
【0073】
このようにして算出された自立運転継続時間Tcを用いて、エンジンECU200は、エンジン2の間欠停止条件が成立してから自立運転継続時間Tcが経過するまでエンジン2の自立運転を継続させるようになっている。
【0074】
次に、図4を参照して、本実施の形態に係る間欠停止時制御ルーチンについて説明する。
【0075】
図4に示す間欠停止時制御ルーチンは、前述したように間欠停止条件が成立したときに実行されるものであり、所定時間毎(例えば数msec毎)に繰り返し実行される。
【0076】
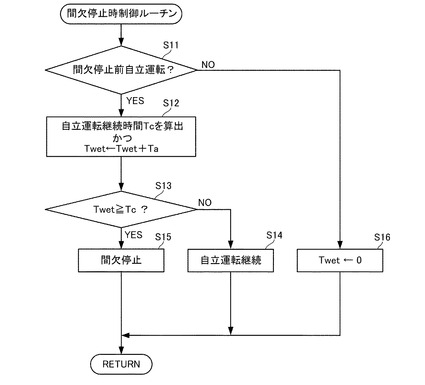
図4に示すように、まず、エンジンECU200は、エンジン2の運転状態が間欠停止前の自立運転であるか否かを判断する(ステップS11)。エンジンECU200は、エンジン2の運転状態が間欠停止前の自立運転であると判断した場合には、自立運転継続時間Tcを算出する(Tc=Tb×WET係数)とともに、間欠停止条件が成立してからの経過時間Twetを求める(ステップS12)。経過時間Twetは、前回ルーチンで計時された経過時間Twetに今回ルーチンの経過時間Taを加算した値とする(Twet←Twet+Ta)。
【0077】
次いで、エンジンECU200は、経過時間Twetが自立運転継続時間Tc以上となったか否かを判断する(ステップS13)。エンジンECU200は、経過時間Twetが自立運転継続時間Tc以上となっていない、すなわち自立運転継続時間Tcが経過していないと判断した場合には、エンジン2の自立運転を継続して(ステップS14)、本ルーチンを終了する。つまり、自立運転継続時間Tcが経過していない場合には、吸気通路壁面22a(図2参照)に付着した付着燃料の影響により空燃比が目標空燃比に近づいていないと考えられることから、空燃比を目標空燃比に近づけるべくエンジン2の自立運転を継続する。なお、本ルーチンが終了した後は、所定時間間隔で次回の間欠停止時制御ルーチンが実行される。
【0078】
一方、エンジンECU200は、経過時間Twetが自立運転継続時間Tc以上となった、つまり自立運転継続時間Tcが経過したと判断した場合には、吸気通路壁面22a(図2参照)に付着した付着燃料がなくなった、すなわち付着燃料が完全になくなるか、あるいは空燃比に影響を与えないほど微小になったと考えられることから、エンジン2を間欠停止して(ステップS15)、本ルーチンを終了する。すなわち、エンジンECU200は、エンジン2への燃料供給を停止するとともに点火を停止する。これにより、エンジン2が間欠停止させられる。
【0079】
このように、本実施の形態に係る間欠停止時制御ルーチンでは、吸気通路壁面22a(図2参照)に付着した付着燃料がなくなるまでの間、エンジン2の自立運転が継続される。
【0080】
他方、ステップS11において、エンジンECU200は、エンジン2の運転状態が間欠停止前の自立運転でないと判断した場合には、経過時間Twetを0にリセット(Twet←0)して(ステップS16)、本ルーチンを終了する。エンジン2の運転状態が間欠停止前の自立運転でない場合の例としては、例えば、エンジン2の自立運転中に運転者によりアクセル操作がなされ、エンジン2の始動要求が生じた場合等が挙げられる。
【0081】
以上のように、本実施の形態に係る車両用制御装置10は、上述したような空燃比の検出値を用いることができない状況下であっても、付着燃料がなくなるまでの時間として自立運転継続時間Tcを算出することができる。このため、本実施の形態に係る車両用制御装置10は、空燃比フィードバック制御の開始の有無に関わらず自立運転継続時間Tcが経過するまでエンジン2の自立運転を継続させることができる。したがって、本実施の形態に係る車両用制御装置10は、第1の実施の形態に係る作用効果を得ることができる。
【0082】
また、本実施の形態に係る車両用制御装置10は、例えば最終噴射量TAUが多い場合には付着燃料も多いと判断して自立運転継続時間Tcを長くするなど、付着燃料の量に基づき最適な自立運転継続時間を算出することができる。
【0083】
また、本実施の形態に係る車両用制御装置10は、例えば冷却水温Twが低い場合には付着燃料が気化しづらいと判断して自立運転継続時間Tcを長くするなど、付着燃料の量に基づき最適な自立運転継続時間Tcを算出することができる。
【0084】
以上説明したように、本発明に係る車両用制御装置は、従来と比較して内燃機関の停止前や再始動時の排気エミッションを向上させることができ、内燃機関および電動機を駆動源として備えたハイブリッド車両に搭載される車両用制御装置に有用である。
【符号の説明】
【0085】
1 ハイブリッド車両
2 エンジン(内燃機関)
10 車両用制御装置
22 吸気通路
22a 吸気通路壁面
28 排気通路
29 浄化装置
29a 三元触媒(触媒)
100 HVECU
200 エンジンECU(制御手段)
202 水温センサ
207 A/Fセンサ(空燃比検出手段)
208 O2センサ
MG1、MG2 モータジェネレータ(電動機)
【技術分野】
【0001】
本発明は、内燃機関および電動機を駆動源として備えたハイブリッド車両に搭載される車両用制御装置に関する。
【背景技術】
【0002】
一般に、ハイブリッド車両では、車両停止時にユーザの操作によって内燃機関の停止および始動を行う通常運転の他に、燃費向上や大気環境保全のために車両走行中に車両状態に応じて内燃機関の停止および始動を行う間欠運転が行われる。
【0003】
ところで、内燃機関の再始動時は、始動性や排気エミッションの排出抑制などを考慮して、適正な燃料噴射量を決定する必要がある。また、内燃機関の再始動時における適正な燃料噴射量を決定するには、内燃機関の停止時あるいは停止中に吸気通路壁面に付着した燃料を加味することが望ましい。
【0004】
従来、内燃機関の再始動時における燃料噴射量を適正に決定し得る車両用制御装置として、例えば特許文献1に記載された車両用制御装置が知られている。特許文献1に記載の車両用制御装置は、ハイブリッド車両に搭載され、内燃機関の停止直後に電動機によるモータリングを実行することにより、吸気通路内に発生する空気の流れによって吸気通路壁面に付着している燃料を強制的に離脱させて実際の燃料付着量をゼロにするようになっている。この従来の車両用制御装置によれば、内燃機関の再始動時、燃料付着量推定手段により推定される燃料付着量の初期値をゼロに設定した状態で燃料付着量の推定を開始することができる。したがって、内燃機関の再始動時の燃料付着量の推定値と実際値とを一致させることができ、内燃機関の再始動時における燃料噴射量を適正な量となるよう決定することができる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2004−144030号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載の従来の車両用制御装置において、内燃機関の停止直後に実行されるモータリング中は、燃料噴射や点火も行われないため、吸気通路から導入された空気すなわち新気がそのまま触媒に導入されることとなる。このため、触媒内が新気で満たされ、触媒内の空燃比がリーンとなってしまう。したがって、排気浄化装置の排気浄化性能が低下し、次回再始動時の排気エミッションが悪化するという問題があった。
【0007】
また、従来の車両用制御装置にあっては、上記モータリングによって発生する空気の流れにより、吸気通路壁面に付着していた燃料が燃焼されることなく、そのまま触媒に導入され、場合によっては外部に排出されるおそれがある。このような場合には、内燃機関のモータリング中における排気エミッションが悪化するという問題があった。
【0008】
特に、タンブル流を形成するべく吸気ポートに屈曲部を設けた構造の内燃機関にあっては、インジェクタから噴霧された多くの燃料が屈曲部に付着し易いため、上記のような問題が特に顕著である。
【0009】
本発明は、上述のような従来の問題を解決するためになされたもので、従来と比較して内燃機関の停止前や再始動時の排気エミッションを向上させることができる車両用制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明に係る車両用制御装置は、上記目的達成のため、(1)車両の駆動力を発生する動力源として内燃機関および電動機と、前記内燃機関の排気通路上に設けられた触媒と、前記内燃機関を停止する際に、前記内燃機関を予め定められた回転数で自立運転させた後に停止させるよう制御する制御手段とを備えたハイブリッド車両に用いられる車両用制御装置であって、前記制御手段は、前記内燃機関を停止する際、前記内燃機関の吸気通路壁面に付着した付着燃料がなくなるまで前記自立運転を継続させる構成を有する。
【0011】
この構成により、本発明に係る車両用制御装置は、内燃機関を停止する際、制御手段が内燃機関の吸気通路壁面に付着した付着燃料がなくなるまで内燃機関の自立運転を継続させる。このため、例えば付着燃料の影響によって空燃比がリッチとなったり、あるいは新気によって空燃比がリーンとなるなど、触媒内の空燃比が不安定な状態となることが無く、従来と比較して内燃機関の次回再始動時の排気エミッションを向上させることができる。
【0012】
また、本発明に係る車両用制御装置は、吸気通路壁面に付着した付着燃料がなくなるまで内燃機関の自立運転を継続するので、付着燃料が燃焼されることなく、そのまま触媒に導入され、外部に排出されることを防止することができる。したがって、従来と比較して内燃機関の停止前の排気エミッションを向上させることができる。
【0013】
また、本発明に係る車両用制御装置は、上記(1)に記載の車両用制御装置において、(2)前記触媒の空燃比を検出する空燃比検出手段を備え、前記制御手段は、前記空燃比検出手段の出力値が目標空燃比よりもリッチな空燃比と前記目標空燃比よりもリーンな空燃比との間で反転した反転回数が予め定められた判定回数以上となるまで前記自立運転を継続させる構成を有する。
【0014】
この構成により、本発明に係る車両用制御装置は、空燃比検出手段の出力値が目標空燃比に対してリッチおよびリーンの間で反転した反転回数が予め定められた判定回数以上となることにより、触媒の空燃比が目標空燃比付近に収束していると判断することができる。このため、触媒の空燃比の目標空燃比付近への収束に基づき、吸気通路壁面に付着した付着燃料がなくなったと判断することができる。したがって、本発明に係る車両用制御装置は、実際に付着燃料がなくなるまで内燃機関の自立運転を継続させることができる。
【0015】
また、本発明に係る車両用制御装置は、上記(1)に記載の車両用制御装置において、(3)前記制御手段は、前記目標空燃比が得られるよう算出された最終噴射量から基本自立運転時間を求め、前記基本自立運転時間に所定の係数を乗ずることにより前記付着燃料がなくなるまでの時間として自立運転継続時間を算出し、前記自立運転継続時間が経過するまで前記自立運転を継続させる構成を有する。
【0016】
この構成により、本発明に係る車両用制御装置は、例えば冷却水温が空燃比フィードバック制御開始水温に達していない場合や空燃比フィードバック制御の開始までに時間を要する場合などのように空燃比の検出値を用いることができない状況下であっても、付着燃料がなくなるまでの時間として自立運転継続時間を算出することができる。したがって、本発明に係る車両用制御装置は、空燃比フィードバック制御の開始の有無に関わらず自立運転継続時間が経過するまで内燃機関の自立運転を継続させることができる。
【0017】
また、本発明に係る車両用制御装置は、例えば最終噴射量が多い場合には付着燃料も多いと判断して自立運転継続時間を長くするなど、付着燃料の量に基づき最適な自立運転継続時間を算出することができる。
【0018】
また、本発明に係る車両用制御装置は、上記(3)に記載の車両用制御装置において、(4)前記所定の係数は、前記内燃機関の冷却水温に基づき決定される。
【0019】
この構成により、本発明に係る車両用制御装置は、例えば冷却水温が低い場合には付着燃料が気化しづらいと判断して自立運転継続時間を長くするなど、付着燃料の量に基づき最適な自立運転継続時間を算出することができる。
【発明の効果】
【0020】
本発明によれば、従来と比較して内燃機関の停止前や再始動時の排気エミッションを向上させることができる車両用制御装置を提供することができる。
【図面の簡単な説明】
【0021】
【図1】本発明の第1の実施の形態に係る車両用制御装置が適用されるハイブリッド車両の概略構成図である。
【図2】本発明の第1の実施の形態に係るエンジンの概略構成図である。
【図3】本発明の第1の実施の形態に係るエンジンECUで実行される間欠停止時制御ルーチンの一例を示すフローチャートである。
【図4】本発明の第2の実施の形態に係るエンジンECUで実行されるエンジンの間欠停止時制御ルーチンの一例を示すフローチャートである。
【図5】最終噴射量TAUと基本自立運転時間Tbとの関係を示すマップである。
【図6】冷却水温TwとWET係数との関係を示すマップである。
【発明を実施するための形態】
【0022】
以下、本発明の実施の形態について、図面を参照して説明する。
【0023】
(第1の実施の形態)
図1〜図3を参照して、本発明の第1の実施の形態に係る車両用制御装置について説明する。本実施の形態に係る車両用制御装置は、車両の駆動力を発生する動力源として内燃機関および電動機を搭載した車両、いわゆるハイブリッド車両に用いられる。
【0024】
図1に示すように、ハイブリッド車両1は、エンジン2と、動力分配統合機構3と、モータジェネレータMG1、MG2と、減速ギヤ4と、車両用制御装置10(図2参照)とを含んで構成されている。図2に示す車両用制御装置10は、エンジン用電子制御装置(以下、単にエンジンECUという)200と、O2センサ208とを含んで構成されている。
【0025】
エンジン2は、例えばガソリンまたは軽油などの炭化水素系の燃料により動力を出力可能な内燃機関として構成されている。エンジン2は、図2に示すように、エアクリーナ20により清浄された空気をスロットルバルブ21および吸気通路22を介して吸入する。その後、エンジン2は、燃料噴射弁23からガソリンを噴射して吸入された空気とガソリンとを混合し、この混合気を吸気バルブ24を介して燃料室に吸入する。
【0026】
次いで、エンジン2は、吸入した混合気を点火プラグ25による電気火花によって爆発燃焼させて、そのエネルギにより押し下げられるピストン26の往復運動をクランクシャフト27の回転運動に変換する。
【0027】
エンジン2の排気通路28上には、一酸化炭素(CO)や炭化水素(HC)、窒素酸化物(NOx)の有害成分を浄化する排ガス浄化触媒(以下、三元触媒という)29aを含む浄化装置29が設けられている。したがって、エンジン2からの排気は、浄化装置29を介して外気へ排出される。本実施の形態における三元触媒29aは、本発明に係る触媒を構成する。
【0028】
三元触媒29aは、同触媒に導入される排気ガスの空燃比(A/F)が略理論空燃比のとき、排気ガス中の未燃成分(HC、CO)を酸化し、同時にNOxを還元する機能により排気ガスを浄化する。具体的には、三元触媒29aは、酸素を吸蔵(貯蔵)する酸素吸蔵機能を有しており、導入される排気ガスの空燃比がリッチである場合には吸蔵している酸素にて未燃HC、CO等の未燃成分を酸化する(酸素を放出する)。一方、三元触媒29aに導入される排気ガスの空燃比がリーンである場合には排気ガス中の酸素およびNOxを還元することで得られる酸素を内部に吸蔵する。このようにして、三元触媒29aは、エンジン2の燃焼室から排出される排気ガス中の未燃HC、COやNOxを効果的に浄化することができる。
【0029】
このような三元触媒29aの浄化特性は、エンジン2の燃焼状態を示す空燃比に依存し、その空燃比が理論空燃比近傍であるときに三元触媒29aは最も有効に機能する。このような点から、エンジン2においては、三元触媒29aの上流側および下流側にそれぞれ設けられた空燃比センサの各出力値に基づいて、空燃比(実空燃比)が理論空燃比に一致するように後述する空燃比フィードバック制御がエンジンECU200により実行されている。本実施の形態では、前述の空燃比センサとして、三元触媒29aの上流側にA/Fセンサ207を配置し、三元触媒29aの下流側にO2センサ208を配置した。
【0030】
A/Fセンサ207は、空燃比に比例した出力特性を有し、比較的広範囲にわたる空燃比を連続的に検出可能である。一方、O2センサ208は、理論空燃比を境に出力値が急変する特性(Z特性)を有し、排気ガス中の酸素濃度を起電力におきかえ、空燃比が理論空燃比に対してリーンかリッチかを検出するものである。なお、三元触媒29aの上流側に設けられる空燃比センサとしては、空燃比に対してリニアな特性を有するA/Fセンサに代えて、O2センサを用いてもよい。本実施の形態におけるA/Fセンサ207は、本発明に係る空燃比検出手段を構成する。
【0031】
また、エンジン2は、吸気バルブ24の開閉タイミングVTを連続的に変更可能な可変バルブタイミング機構50を備える。可変バルブタイミング機構50は、図示しないベーン式のVVTコントローラと、オイルコントロールバルブとを備え、吸気バルブ24の開閉タイミングVTにおけるインテークカムシャフト(図示せず)の角度を連続的に変更する。
【0032】
また、エンジン2は、エンジンECU200によって制御されるようになっている。エンジンECU200は、CPU200aを中心とするマイクロプロセッサとして構成されており、処理プログラムを記憶するROM200bと、データを一時的に記憶するRAM200cと、図示しない入出力ポートおよび通信ポートとを備えている。
【0033】
エンジンECU200には、クランクポジションセンサ201、水温センサ202、カムポジションセンサ203、スロットルバルブポジションセンサ204、エアフローメータ205、温度センサ206、A/Fセンサ207、O2センサ208が接続されている。
【0034】
クランクポジションセンサ201は、クランクシャフト27の回転位置すなわちクランク角θcrやエンジン回転数Neを検出する。水温センサ202は、エンジン2の冷却水の温度すなわち冷却水温Twを検出する。カムポジションセンサ203は、インテークカムシャフト28や排気バルブを開閉するエキゾーストカムシャフトの回転位置すなわちカム角θcaを検出する。スロットルバルブポジションセンサ204は、スロットルバルブ21のスロットル開度THを検出する。エアフローメータ205は、吸気管に取り付けられ、吸入空気の質量流量すなわち吸入空気量Qaを検出する。温度センサ206は、吸気管に取り付けられ、吸気温Taを検出する。A/Fセンサ207およびO2センサ208は、上述した通りである。これら各センサは、検出結果に応じた信号をエンジンECU200に出力する。
【0035】
エンジンECU200は、エンジン2を駆動するための種々の制御信号、例えば燃料噴射弁23への駆動信号や、スロットル開度THを調節するスロットルモータ21aへの駆動信号、イグニッションコイル209への制御信号、可変バルブタイミング機構50への制御信号などを出力ポートを介して出力するようになっている。
【0036】
エンジンECU200は、ハイブリッド用電子制御装置(以下、単にHVECUという)100と通信しており、HVECU100からの制御信号によりエンジン2を運転制御するとともに、必要に応じてエンジン2の運転状態に関するデータを出力する。
【0037】
また、エンジンECU200は、排気エミッションを低減させるために、混合気の空燃比が理論空燃比となるように燃料噴射量を制御する、空燃比フィードバック制御を実行するようになっている。この空燃比フィードバック制御は、所定の開始条件が成立したことを条件に実行される。所定の開始条件としては、水温センサ202により検出された冷却水温Twが所定温度以上であること、エンジン始動中でないこと、エンジン始動後の燃料増量中でないなどの複数の条件が挙げられ、これら条件すべてを満足するときに所定の開始条件が成立したものと判定される。
【0038】
例えば、この空燃比フィードバック制御では、A/Fセンサ207の検出結果から気筒内の混合気の空燃比を把握し、現状の負荷状態で要求される空燃比へと補正するための第1補正係数を演算して、第1補正係数に基づいて燃料噴射弁23からの燃料噴射量を調整するメインF/B制御が実行される。さらに、メインF/B制御に加えて、O2センサ208の検出結果に基づいて第2補正係数を演算し、メインF/B制御にて得られた第1補正係数を修正するサブF/B制御が実行される。このようなサブF/B制御を実行することにより、A/Fセンサ207の出力特性のバラツキに基づく空燃比の誤差を、充分に撹拌されて酸素濃度が平衡状態となった三元触媒29aの下流の排気ガスからO2センサ208が検出した空燃比に基づいて修正可能である。これにより、空燃比フィードバック制御の精度をより向上させることができる。
【0039】
また、図1に示すように、エンジンECU200は、ハイブリッド車両1の走行中に、車両状態に応じてエンジン2の運転を停止(以下、このような運転停止を間欠停止という)するようになっている。このエンジン2の間欠停止は、後述する間欠停止時制御ルーチンにしたがって実行されるものであり、例えば車速Vがエンジン2を停止してもよい閾値未満の状態でアクセル開度Accや車速V、バッテリ80の状態からハイブリッド車両1に要求される車両要求パワーが閾値未満となり、他にエンジン2の運転を継続する要求がないときに実行される。例えば、車速Vが閾値未満(例えば、V<50km/h)であるときにアクセルOFF(Acc=0%)され、かつバッテリ80の残容量(SOC)低下により間欠停止が禁止されていない状態である場合に、エンジン2の間欠停止が行われる。ここで、エンジン2の間欠停止を実行する上述したような条件を、以下、間欠停止条件という。
【0040】
さらに、エンジンECU200は、エンジン2を間欠停止する際に、エンジン2を予め定められた所定の回転数Nstopで自立運転させた後に停止させるよう制御するようになっている。自立運転とは、電動機(例えば、MG1)からのトルクなしでエンジン2が回転を継続できる運転状態にあることをいう。また、所定の回転数Nstopは、エンジン2を安定して運転することができる回転数範囲のうちの低回転数領域で設定されるものであり、例えば900rpmや1000rpmなどの回転数を用いることができる。
【0041】
また、エンジンECU200は、上述の間欠停止時、エンジン2の吸気通路22の吸気通路壁面22a(図2参照)に付着した付着燃料がなくなる、すなわち付着燃料が完全になくなるか、あるいは空燃比に影響を与えないほど微小になるまでの間、上述の自立運転を継続させるようになっている。付着燃料がなくなったか否かの判断は、A/Fセンサ207の出力値が目標空燃比よりもリッチな空燃比と同目標空燃比よりもリーンな空燃比との間で反転した反転回数が予め定められた判定回数(例えば、2回)以上となったか否かにより行う。前述の反転回数は、フィードバックカウント値(CFB)としてRAM200cに逐次記憶される。また、前述の判定回数は、判定値としてROM200bに予め記憶されている。
【0042】
ここで、本実施の形態では、上述の目標空燃比は、例えば理論空燃比であるが、エンジン2の運転状態に応じて適宜設定されてもよいし、理論空燃比近傍のように一定の幅を持たせてもよい。なお、付着燃料がなくなったか否かの判断に用いられる判定回数は、2回に限らず、例えば3回、4回など少なくとも2回以上の回数であればいずれの回数を設定してもよい。ただし、燃費を考慮すると、上記判定回数は、できる限り少ないほうが望ましい。エンジン2の間欠停止時制御ルーチンの詳細については、後述する。
【0043】
動力分配統合機構3は、クランクシャフト27にダンパ30を介して接続された3軸式の動力分配統合機構である。動力分配統合機構3は、外歯歯車のサンギヤ31と、サンギヤ31と同心円上に配置された内歯歯車のリングギヤ32と、サンギヤ31およびリングギヤ32に噛み合う複数のピニオンギヤ33と、複数のピニオンギヤ33を自転かつ公転自在に保持するキャリア34とを備えている。つまり、動力分配統合機構3は、サンギヤ31とリングギヤ32とキャリア34とを回転要素として差動作用を行う遊星歯車機構として構成されている。
【0044】
キャリア34はクランクシャフト27に連結され、サンギヤ31はモータジェネレータMG1に連結されている。また、リングギヤ32は、リングギヤ軸32aを介して減速ギヤ4に連結されている。リングギヤ軸32aには、カウンタドライブギヤ35が連結されている。カウンタドライブギヤ35は、ギヤ機構60と噛み合っている。
【0045】
動力分配統合機構3は、モータジェネレータMG1が発電機として機能するときには、キャリア34から入力されるエンジン2からの動力をサンギヤ31側とリングギヤ32側にそのギヤ比に応じて分配する。一方、動力分配統合機構3は、モータジェネレータMG1が電動機として機能するときには、キャリア34から入力されるエンジン2からの動力とサンギヤ31から入力されるモータジェネレータMG1からの動力とを統合してリングギヤ32側に出力する。リングギヤ32に出力された動力は、カウンタドライブギヤ35からギヤ機構60およびデファレンシャルギヤ62を介して、最終的には車両の駆動輪63a、63bに出力される。
【0046】
減速ギヤ4は、モータジェネレータMG2に連結されたサンギヤ41と、サンギヤ41と同心円上に配置されたリングギヤ42と、サンギヤ41およびリングギヤ42に噛み合う複数のピニオンギヤ43と、一端が本体ケースに固定され、他端がピニオンギヤ43を自転自在に支持する支持軸を有するキャリア44とを備えている。減速ギヤ4は、サンギヤ41、リングギヤ42およびピニオンギヤ43を回転要素としてモータジェネレータMG2から伝達された回転を減速して駆動トルクを増幅する遊星歯車機構を構成している。
【0047】
減速ギヤ4は、モータジェネレータMG2が電動機として機能するときには、モータジェネレータMG2から伝達された回転を減速して駆動トルクを増幅してリングギヤ42から出力する。一方、減速ギヤ4は、リングギヤ42に入力された動力による回転を加速して駆動トルクを減衰させてサンギヤ41から出力することにより、モータジェネレータMG2を発電機として機能させる。
【0048】
モータジェネレータMG1、MG2は、供給された電力を機械的動力に変換する電動機としての機能と、入力された機械的動力を電力に変換する発電機としての機能とを兼ね備えた周知の同期発電電動機として構成されている。モータジェネレータMG1は、主に発電機として用いられ、モータジェネレータMG2は、主に電動機として用いられる。本実施の形態におけるモータジェネレータMG1、MG2は、本発明に係る電動機を構成する。
【0049】
モータジェネレータMG1、MG2は、インバータ81、82を介してバッテリ80と電力のやりとりを行う。インバータ81、82とバッテリ80とを接続する電力ライン83は、各インバータ81、82が共用する正極母線および負極母線として構成されており、モータジェネレータMG1、MG2のいずれかで発電される電力を他のモータジェネレータで消費することができるようになっている。したがって、バッテリ80は、モータジェネレータMG1、MG2のいずれかから生じた電力や不足する電力により充放電されることになる。なお、モータジェネレータMG1、MG2により電力収支のバランスをとるものとすれば、バッテリ80は充放電されない。
【0050】
モータジェネレータMG1、MG2は、いずれもモータ用電子制御装置(以下、単にモータECUという)300により駆動制御されている。モータECU300には、モータジェネレータMG1、MG2を駆動制御するために必要な信号、例えばモータジェネレータMG1、MG2の回転子の回転位置を検出する回転位置検出センサ85、86からの信号や図示しない電流センサにより検出されるモータジェネレータMG1、MG2に印加される相電流などが入力される。モータECU300からは、インバータ81、82へのスイッチング制御信号が出力されている。
【0051】
モータECU300は、HVECU100と通信しており、HVECU100からの制御信号によってモータジェネレータMG1、MG2を駆動制御するとともに必要に応じてモータジェネレータMG1、MG2の運転状態に関するデータをHVECU100に出力する。モータECU300は、回転位置検出センサ85、86からの信号に基づいてモータジェネレータMG1、MG2の回転数Nm1、Nm2を演算する。
【0052】
バッテリ80は、バッテリECU400によって管理されている。バッテリECU400には、バッテリ80を管理するのに必要な信号、例えばバッテリ80の端子間に設置された図示しない電圧センサからの端子間電圧、バッテリ80の出力端子に接続された電力ライン83に取り付けられた図示しない電流センサからの充放電電流、バッテリ80に取り付けられた温度センサ87からの電池温度Tbなどが入力される。バッテリECU400は、必要に応じてバッテリ80の状態に関するデータを通信によりHVECU100に出力する。また、バッテリECU400は、バッテリ80を管理するために電流センサにより検出された充放電電流の積算値に基づいて残容量(SOC)を演算したり、演算した残容量(SOC)と電池温度Tbとに基づいてバッテリ80を充放電してもよい最大許容電力である入出力制限Win、Woutを演算している。
【0053】
HVECU100は、CPU100aを中心とするマイクロプロセッサとして構成されており、処理プログラムを記憶するROM100bと、データを一時的に記憶するRAM100cと、図示しない入出力ポートおよび通信ポートとを備える。
【0054】
HVECU100には、イグニッションスイッチ101、アクセルペダルポジションセンサ102、車速センサ103が接続されている。イグニッションスイッチ101は、ユーザの操作に応じてイグニッション信号をHVECU100に出力する。アクセルペダルポジションセンサ102は、アクセルペダル8の操作量に基づきアクセル開度Accを検出し、アクセル開度Accに応じた信号をHVECU100に出力する。車速センサ103は、ハイブリッド車両1の車速Vを検出し、車速Vに応じた信号をHVECU100に出力する。
【0055】
HVECU100は、前述したように、エンジンECU200やモータECU300およびバッテリECU400と通信ポートを介して接続されており、エンジンECU200やモータECU300およびバッテリECU400と各種制御信号やデータのやりとりを行っている。
【0056】
次に、図3を参照して、エンジンECU200によって実行されるエンジン2の間欠停止時制御ルーチンについて、詳しく説明する。
【0057】
図3に示す間欠停止時制御ルーチンは、前述したように間欠停止条件が成立したときに実行されるものであり、所定時間毎(例えば数msec毎)に繰り返し実行される。
【0058】
図3に示すように、まず、エンジンECU200は、エンジン2の運転状態が間欠停止前の自立運転であるか否かを判断する(ステップS1)。エンジンECU200は、エンジン2の運転状態が間欠停止前の自立運転であると判断した場合には、空燃比(A/F)のリッチ/リーンの反転があるか否かを判断する(ステップS2)。具体的には、エンジンECU200は、A/Fセンサ207の出力値が目標空燃比よりもリッチな空燃比と同目標空燃比よりもリーンな空燃比との間で反転したか否かを判断する。例えば、前回ルーチンの空燃比がリッチで今回ルーチンで空燃比がリーンとなった場合、あるいはその逆の場合には、空燃比(A/F)のリッチ/リーンの反転があると判断される。A/Fセンサ207の出力値は、例えば空燃比フィードバック制御で用いられる出力値を用いることができる。
【0059】
エンジンECU200は、空燃比(A/F)のリッチ/リーンの反転ありと判断した場合には、フィードバックカウント値(CFB)をカウントアップ(CFB←CFB+1)する(ステップS3)。なお、フィードバックカウント値(CFB)の初期値は、0としている。
【0060】
一方、エンジンECU200は、空燃比(A/F)のリッチ/リーンの反転がないと判断した場合には、フィードバックカウント値(CFB)をカウントアップすることなく、ステップS4に移行する。
【0061】
次いで、エンジンECU200は、フィードバックカウント値(CFB)が予め定められた判定値(例えば、2)以上となったか否かを判断する(ステップS4)。ここで、判定値は、上述した通り、予め定められた判定回数(例えば、2回)である。
【0062】
エンジンECU200は、フィードバックカウント値(CFB)が判定値以上となっていないと判断した場合には、エンジン2の自立運転を継続して(ステップS5)、本ルーチンを終了する。つまり、フィードバックカウント値(CFB)が判定値に達していない場合には、吸気通路壁面22a(図2参照)に付着した付着燃料の影響により空燃比が目標空燃比に近づいていないと考えられることから、空燃比を目標空燃比に近づけるべくエンジン2の自立運転を継続する。なお、本ルーチンが終了した後は、所定時間間隔で次回の間欠停止時制御ルーチンが実行される。
【0063】
一方、エンジンECU200は、フィードバックカウント値(CFB)が判定値以上となったと判断した場合には、吸気通路壁面22a(図2参照)に付着した付着燃料がなくなった、すなわち付着燃料が完全になくなるか、あるいは空燃比に影響を与えないほど微小になったと考えられることから、エンジン2を間欠停止して(ステップS6)、本ルーチンを終了する。すなわち、エンジンECU200は、エンジン2への燃料供給を停止するとともに点火を停止する。これにより、エンジン2が間欠停止させられる。
【0064】
このように、本実施の形態に係る間欠停止時制御ルーチンでは、吸気通路壁面22a(図2参照)に付着した付着燃料がなくなるまでの間、エンジン2の自立運転が継続される。
【0065】
他方、ステップS1において、エンジンECU200は、エンジン2の運転状態が間欠停止前の自立運転でないと判断した場合には、フィードバックカウント値(CFB)を0にリセット(CFB←0)して(ステップS7)、本ルーチンを終了する。エンジン2の運転状態が間欠停止前の自立運転でない場合の例としては、例えば、エンジン2の自立運転中に運転者によりアクセル操作がなされ、エンジン2の始動要求が生じた場合等が挙げられる。
【0066】
以上のように、本実施の形態に係る車両用制御装置10は、エンジン2を間欠停止する際、エンジンECU200が吸気通路壁面22aに付着した付着燃料がなくなるまでエンジン2の自立運転を継続させる。このため、例えば付着燃料の影響によって空燃比がリッチとなったり、あるいは新気によって空燃比がリーンとなるなど、三元触媒29a内の空燃比が不安定な状態となることが無く、従来と比較してエンジン2の次回再始動時の排気エミッションを向上させることができる。
【0067】
また、本実施の形態に係る車両用制御装置10は、吸気通路壁面22aに付着した付着燃料がなくなるまでエンジン2の自立運転を継続するので、付着燃料が燃焼されることなく、そのまま三元触媒29aに導入され、外部に排出されることを防止することができる。したがって、従来と比較してエンジン2の間欠停止前の排気エミッションを向上させることができる。
【0068】
また、本実施の形態に係る車両用制御装置10は、A/Fセンサ207の出力値が目標空燃比に対してリッチおよびリーンの間で反転した反転回数が予め定められた判定回数以上となる、すなわちフィードバックカウント値(CFB)が判定値以上となることにより、三元触媒29aの空燃比が目標空燃比付近に収束していると判断することができる。このため、三元触媒29aの空燃比の目標空燃比付近への収束に基づき、吸気通路壁面22aに付着した付着燃料がなくなったと判断することができる。したがって、本実施の形態に係る車両用制御装置10は、実際に付着燃料がなくなるまでエンジン2の自立運転を継続させることができる。
【0069】
(第2の実施の形態)
次に、図4〜図6を参照して、本発明の第2の実施の形態に係る車両用制御装置について説明する。第1の実施の形態と同様の構成には同一の符号を付して説明を省略する。
【0070】
冷却水温Twが空燃比フィードバック制御開始水温に達していない場合や空燃比フィードバック制御の開始までに時間を要する場合などのように空燃比の検出値を用いることができない状況下、例えばA/Fセンサ207(図2参照)が活性化温度に達していないために安定した出力値を出力できないような場合等では、上述した第1の実施の形態に係る間欠停止時制御ルーチンを実行することができない。そこで、本実施の形態では、上記のような状況であっても、吸気通路壁面22a(図2参照)に付着した付着燃料がなくなるまでエンジン2の自立運転を継続して、エンジン2の次回再始動時あるいは間欠停止前の排気エミッションを向上させることができる間欠停止時制御ルーチンを実行するようにした。
【0071】
本実施の形態に係るエンジンECU200(図2参照)は、目標空燃比が得られるよう算出された最終噴射量TAUから基本自立運転時間Tbを求めるようになっている。エンジンECU200のROM200bには、最終噴射量TAUと基本自立運転時間Tbとの関係を示すマップ(図5参照)が予め実験的に求めて記憶されている。したがって、エンジンECU200は、最終噴射量TAUをパラメータとして図5に示すマップを参照することにより基本自立運転時間Tbを求める。図5に示すように、基本自立運転時間Tbは、最終噴射量TAUが少ないほど、短時間に設定されるようになっている。これは、最終噴射量TAUが少なければ、吸気通路壁面22a(図2参照)の付着燃料も少ないと考えられ、エンジン2の自立運転時間を長くしなくとも十分に付着燃料をなくすことができるからである。ここで、最終噴射量TAUは、吸入空気量Qaとエンジン回転数Neとから算出された基本噴射量Tpに、例えば吸気温補正係数や空燃比フィードバック補正係数などの各種補正係数を乗ずることにより算出される。また、本実施の形態に係る間欠停止時制御ルーチンで用いられる最終噴射量TAUは、アクセルがONからOFFに切替わる(アクセルON→OFF時)、つまりアクセルOFF(Acc=0%)とされる直前の最終噴射量である。
【0072】
また、エンジンECU200は、上述の通り算出された基本自立運転時間Tbに、所定の係数としてWET係数を乗ずることにより、吸気通路壁面22aの付着燃料がなくなるまでの時間として自立運転継続時間Tcを算出するようになっている。エンジンECU200のROM200bには、冷却水温TwとWET係数との関係を示すマップ(図6参照)が予め実験的に求めて記憶されている。したがって、エンジンECU200は、冷却水温Twをパラメータとして図6に示すマップを参照することによりWET係数を求める。図6に示すように、WET係数は、冷却水温Twに基づき決定されるもので、冷却水温Twが高いほど小さい値として決定されるようになっている。これは、冷却水温Twが高ければ、吸気通路壁面22aの付着燃料が気化し易いため、エンジン2の自立運転時間を長くしなくとも十分に付着燃料をなくすことができるからである。
【0073】
このようにして算出された自立運転継続時間Tcを用いて、エンジンECU200は、エンジン2の間欠停止条件が成立してから自立運転継続時間Tcが経過するまでエンジン2の自立運転を継続させるようになっている。
【0074】
次に、図4を参照して、本実施の形態に係る間欠停止時制御ルーチンについて説明する。
【0075】
図4に示す間欠停止時制御ルーチンは、前述したように間欠停止条件が成立したときに実行されるものであり、所定時間毎(例えば数msec毎)に繰り返し実行される。
【0076】
図4に示すように、まず、エンジンECU200は、エンジン2の運転状態が間欠停止前の自立運転であるか否かを判断する(ステップS11)。エンジンECU200は、エンジン2の運転状態が間欠停止前の自立運転であると判断した場合には、自立運転継続時間Tcを算出する(Tc=Tb×WET係数)とともに、間欠停止条件が成立してからの経過時間Twetを求める(ステップS12)。経過時間Twetは、前回ルーチンで計時された経過時間Twetに今回ルーチンの経過時間Taを加算した値とする(Twet←Twet+Ta)。
【0077】
次いで、エンジンECU200は、経過時間Twetが自立運転継続時間Tc以上となったか否かを判断する(ステップS13)。エンジンECU200は、経過時間Twetが自立運転継続時間Tc以上となっていない、すなわち自立運転継続時間Tcが経過していないと判断した場合には、エンジン2の自立運転を継続して(ステップS14)、本ルーチンを終了する。つまり、自立運転継続時間Tcが経過していない場合には、吸気通路壁面22a(図2参照)に付着した付着燃料の影響により空燃比が目標空燃比に近づいていないと考えられることから、空燃比を目標空燃比に近づけるべくエンジン2の自立運転を継続する。なお、本ルーチンが終了した後は、所定時間間隔で次回の間欠停止時制御ルーチンが実行される。
【0078】
一方、エンジンECU200は、経過時間Twetが自立運転継続時間Tc以上となった、つまり自立運転継続時間Tcが経過したと判断した場合には、吸気通路壁面22a(図2参照)に付着した付着燃料がなくなった、すなわち付着燃料が完全になくなるか、あるいは空燃比に影響を与えないほど微小になったと考えられることから、エンジン2を間欠停止して(ステップS15)、本ルーチンを終了する。すなわち、エンジンECU200は、エンジン2への燃料供給を停止するとともに点火を停止する。これにより、エンジン2が間欠停止させられる。
【0079】
このように、本実施の形態に係る間欠停止時制御ルーチンでは、吸気通路壁面22a(図2参照)に付着した付着燃料がなくなるまでの間、エンジン2の自立運転が継続される。
【0080】
他方、ステップS11において、エンジンECU200は、エンジン2の運転状態が間欠停止前の自立運転でないと判断した場合には、経過時間Twetを0にリセット(Twet←0)して(ステップS16)、本ルーチンを終了する。エンジン2の運転状態が間欠停止前の自立運転でない場合の例としては、例えば、エンジン2の自立運転中に運転者によりアクセル操作がなされ、エンジン2の始動要求が生じた場合等が挙げられる。
【0081】
以上のように、本実施の形態に係る車両用制御装置10は、上述したような空燃比の検出値を用いることができない状況下であっても、付着燃料がなくなるまでの時間として自立運転継続時間Tcを算出することができる。このため、本実施の形態に係る車両用制御装置10は、空燃比フィードバック制御の開始の有無に関わらず自立運転継続時間Tcが経過するまでエンジン2の自立運転を継続させることができる。したがって、本実施の形態に係る車両用制御装置10は、第1の実施の形態に係る作用効果を得ることができる。
【0082】
また、本実施の形態に係る車両用制御装置10は、例えば最終噴射量TAUが多い場合には付着燃料も多いと判断して自立運転継続時間Tcを長くするなど、付着燃料の量に基づき最適な自立運転継続時間を算出することができる。
【0083】
また、本実施の形態に係る車両用制御装置10は、例えば冷却水温Twが低い場合には付着燃料が気化しづらいと判断して自立運転継続時間Tcを長くするなど、付着燃料の量に基づき最適な自立運転継続時間Tcを算出することができる。
【0084】
以上説明したように、本発明に係る車両用制御装置は、従来と比較して内燃機関の停止前や再始動時の排気エミッションを向上させることができ、内燃機関および電動機を駆動源として備えたハイブリッド車両に搭載される車両用制御装置に有用である。
【符号の説明】
【0085】
1 ハイブリッド車両
2 エンジン(内燃機関)
10 車両用制御装置
22 吸気通路
22a 吸気通路壁面
28 排気通路
29 浄化装置
29a 三元触媒(触媒)
100 HVECU
200 エンジンECU(制御手段)
202 水温センサ
207 A/Fセンサ(空燃比検出手段)
208 O2センサ
MG1、MG2 モータジェネレータ(電動機)
【特許請求の範囲】
【請求項1】
車両の駆動力を発生する動力源として内燃機関および電動機と、前記内燃機関の排気通路上に設けられた触媒と、前記内燃機関を停止する際に、前記内燃機関を予め定められた回転数で自立運転させた後に停止させるよう制御する制御手段とを備えたハイブリッド車両に用いられる車両用制御装置であって、
前記制御手段は、前記内燃機関を停止する際、前記内燃機関の吸気通路壁面に付着した付着燃料がなくなるまで前記自立運転を継続させることを特徴とする車両用制御装置。
【請求項2】
前記触媒の空燃比を検出する空燃比検出手段を備え、
前記制御手段は、前記空燃比検出手段の出力値が目標空燃比よりもリッチな空燃比と前記目標空燃比よりもリーンな空燃比との間で反転した反転回数が予め定められた判定回数以上となるまで前記自立運転を継続させることを特徴とする請求項1に記載の車両用制御装置。
【請求項3】
前記制御手段は、前記目標空燃比が得られるよう算出された最終噴射量から基本自立運転時間を求め、前記基本自立運転時間に所定の係数を乗ずることにより前記付着燃料がなくなるまでの時間として自立運転継続時間を算出し、前記自立運転継続時間が経過するまで前記自立運転を継続させることを特徴とする請求項1に記載の車両用制御装置。
【請求項4】
前記所定の係数は、前記内燃機関の冷却水温に基づき決定されることを特徴とする請求項3に記載の車両用制御装置。
【請求項1】
車両の駆動力を発生する動力源として内燃機関および電動機と、前記内燃機関の排気通路上に設けられた触媒と、前記内燃機関を停止する際に、前記内燃機関を予め定められた回転数で自立運転させた後に停止させるよう制御する制御手段とを備えたハイブリッド車両に用いられる車両用制御装置であって、
前記制御手段は、前記内燃機関を停止する際、前記内燃機関の吸気通路壁面に付着した付着燃料がなくなるまで前記自立運転を継続させることを特徴とする車両用制御装置。
【請求項2】
前記触媒の空燃比を検出する空燃比検出手段を備え、
前記制御手段は、前記空燃比検出手段の出力値が目標空燃比よりもリッチな空燃比と前記目標空燃比よりもリーンな空燃比との間で反転した反転回数が予め定められた判定回数以上となるまで前記自立運転を継続させることを特徴とする請求項1に記載の車両用制御装置。
【請求項3】
前記制御手段は、前記目標空燃比が得られるよう算出された最終噴射量から基本自立運転時間を求め、前記基本自立運転時間に所定の係数を乗ずることにより前記付着燃料がなくなるまでの時間として自立運転継続時間を算出し、前記自立運転継続時間が経過するまで前記自立運転を継続させることを特徴とする請求項1に記載の車両用制御装置。
【請求項4】
前記所定の係数は、前記内燃機関の冷却水温に基づき決定されることを特徴とする請求項3に記載の車両用制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−107452(P2013−107452A)
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願番号】特願2011−252855(P2011−252855)
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年6月6日(2013.6.6)
【国際特許分類】
【出願日】平成23年11月18日(2011.11.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]