
車両用制御装置

【課題】燃費向上と排気エミッションの向上との両立を図ることができる車両用制御装置を提供する。
【解決手段】加速走行と惰性走行とを車速範囲Rで繰り返す断続走行が可能なハイブリッド車両に用いられる車両用制御装置であって、エンジンを自立運転させて暖機を行うとともにモータMG2の駆動力またはエンジンおよびモータMG2の駆動力を用いて断続走行を実行する暖機断続走行モードと、エンジンおよびモータMG2の駆動力を用いて断続走行を実行する通常断続走行モードとを有し、冷却水温Twが目標暖機温度Toに達したことを条件に暖機が完了したものと判断し、暖機断続走行モードから通常断続走行モードに切り替えるHVECUを備え、HVECUは、暖機断続走行モードの実行中、冷却水温Twに基づき、加速走行時のエンジン出力Peを可変させる。
【解決手段】加速走行と惰性走行とを車速範囲Rで繰り返す断続走行が可能なハイブリッド車両に用いられる車両用制御装置であって、エンジンを自立運転させて暖機を行うとともにモータMG2の駆動力またはエンジンおよびモータMG2の駆動力を用いて断続走行を実行する暖機断続走行モードと、エンジンおよびモータMG2の駆動力を用いて断続走行を実行する通常断続走行モードとを有し、冷却水温Twが目標暖機温度Toに達したことを条件に暖機が完了したものと判断し、暖機断続走行モードから通常断続走行モードに切り替えるHVECUを備え、HVECUは、暖機断続走行モードの実行中、冷却水温Twに基づき、加速走行時のエンジン出力Peを可変させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、駆動力源として内燃機関および電動機を備えた車両に適用される車両用制御装置に関する。
【背景技術】
【0002】
従来、この種の車両用制御装置が適用される車両として、内燃機関およびモータジェネレータ(以下、単にモータという)を駆動力源として備え、車両の走行状態に応じて内燃機関が間欠的に運転および停止されるよう制御されるハイブリッド車両が知られている。
【0003】
近年、このようなハイブリッド車両の中には、例えば内燃機関により駆動力を発生させて車両を走行させる加速走行と、内燃機関に機械的動力を出力させることなく車両の慣性力により惰性で車両を走行させる、いわゆるコーストダウン(以下、惰性走行という)とを交互に行う断続走行により予め設定された目標車速に従って車両を走行させるものもある。このような断続走行を実施することによって、内燃機関を継続的に運転して車両を定速走行させる場合に比べて、燃料消費を抑制した低燃費運転が実現可能である。
【0004】
ところで、一般に、このようなハイブリッド車両にあっても、燃料を燃焼して内燃機関を駆動させているため、排気ガスを排出することに変わりはなく、この排気ガスを浄化するために触媒が設けられている。また、このような触媒は、浄化作用を発揮するために十分に温められている必要がある。したがって、例えば長時間停止後の内燃機関の始動時等には、触媒の温度を上昇させるための暖機走行が行われることが知られている。同暖機走行中は、内燃機関を所定のアイドル回転数で自立運転させるとともに、蓄電池に蓄えられた電力を用いてモータを駆動することによって車両を走行させる。
【0005】
ところが、蓄電池の残容量が所定値以下に低下した状態では、暖機走行中であっても、蓄電池の充電に必要な電力を発電するだけの出力、あるいは車両を走行させるために必要な出力で内燃機関を運転させなければならない。このような場合、暖機走行中の触媒の浄化能力を上回る量の排気ガスが排出されることにより排気エミッションが悪化するおそれがある。
【0006】
近年、暖機走行中における排気エミッションの向上を目的としたハイブリッド車両として、蓄電池の残容量に応じて、モータの駆動力のみで車両を走行させるEV走行を禁止するよう制御する車両用制御装置を備えたものが知られている(例えば、特許文献1参照)。
【0007】
この従来の車両用制御装置は、EV走行を選択するEVスイッチがONとなったときは、蓄電池の残容量が第1の閾値より大きい場合にのみEV走行を許可するとともに、EV走行中に蓄電池の残容量が第1の閾値よりも小さい第2の閾値を下回った場合には、EV走行の継続を禁止する。したがって、この車両用制御装置によれば、暖機走行中に蓄電池の残容量が電力供給可能な下限値を下回ることがなく、暖機走行中のモータの駆動を確保することができる。このため、暖機走行中に内燃機関が自立運転を維持する以上の出力で運転されることがなく、暖機走行中に触媒の浄化能力を上回る量の排気ガスが排出されることを防止することができ、排気エミッションを向上させることが可能である。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2005−51863号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1に記載の従来の車両用制御装置にあっては、例えば上述したような断続走行を行うことについて考慮されておらず、したがって暖機走行中に断続走行に切り替わった場合にモータおよび内燃機関の運転状態をどのように制御するかについても当然考慮されていない。このため、この従来の車両用制御装置においては、断続走行による燃費向上と暖機時における排気エミッションの向上との両立を図ることができないという問題があった。
【0010】
本発明は、上述のような従来の問題を解決するためになされたもので、燃費向上と排気エミッションの向上との両立を図ることができる車両用制御装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明に係る車両用制御装置は、上記目的達成のため、(1)車両の駆動力を発生する駆動力源として内燃機関および電動機と、前記内燃機関の排気通路上に設けられた触媒とを備え、前記駆動力を得て走行する加速走行と前記駆動力源から前記駆動力を出力せずに惰性で走行する惰性走行とを、車速に応じて決定される車速範囲で繰り返し行って走行する断続走行が可能な車両に用いられる車両用制御装置であって、前記内燃機関を予め定められた回転数で自立運転させて前記触媒の暖機を行うとともに前記電動機が発生する駆動力または前記電動機および前記内燃機関が発生する駆動力を用いて前記断続走行を実行する暖機断続走行モードと、前記内燃機関および前記電動機が発生する駆動力を用いて前記断続走行を実行する通常断続走行モードとを有し、前記暖機の進行状態と相関する物理量が予め設定された目標値に達したことを条件に前記暖機が完了したものと判断し、前記暖機断続走行モードから前記通常断続走行モードに切り替える制御手段を備え、前記制御手段は、前記暖機断続走行モードの実行中、前記物理量に基づき、加速走行時の前記内燃機関の機関出力を可変させる構成を有する。
【0012】
この構成により、本発明に係る車両用制御装置は、制御手段が、暖機の進行状態と相関する物理量が予め設定された目標値に達したことを条件に暖機が完了したものと判断し、暖機断続走行モードから通常断続走行モードに切り替える。また、暖機断続走行モードの実行中は、暖機の進行状態に相関する物理量に基づき、断続走行における加速走行時の内燃機関の機関出力が可変させられる。
【0013】
このため、例えば暖機初期時のような低温域で車両を断続走行させる場合には、熱効率が低く内燃機関の運転効率が低下するため、機関出力によらず電動機の出力によって断続走行を行うことができる。これにより暖機初期時の燃費が向上する。一方、暖機が進行すると、上記物理量が大きくなり触媒の浄化能力も高まることから、この浄化能力を上回らない範囲で機関出力を出力可能となる。この場合、触媒の浄化能力を維持しつつ、内燃機関と電動機の出力を用いて断続走行を行うことができる。
【0014】
したがって、本発明に係る車両用制御装置は、暖機の進行状態に応じて電動機および内燃機関の出力を好適に制御することができ、燃費向上と排気エミッションの向上との両立を図ることができる。
【0015】
なお、物理量に基づき機関出力を可変させるとは、例えば物理量自体の変化に基づき機関出力を可変させる場合や、物理量と予め設定された目標値との差分の変化に基づき機関出力を可変させる場合を含む概念である。
【0016】
また、本発明に係る車両用制御装置は、上記(1)に記載の車両用制御装置において、(2)前記制御手段は、前記物理量が大きくなるほど増大する内燃機関の出力上限値を設定し、前記暖機断続走行モードの実行中、前記出力上限値を超えない範囲で前記機関出力を可変する構成を有する。
【0017】
この構成により、本発明に係る車両用制御装置は、暖機断続走行モード中は、物理量が大きくなるほど増大する内燃機関の出力上限値を超えない範囲で機関出力が可変とされる。このため、暖機の進行に伴い高まる触媒の浄化能力を上回るような機関出力が出力されることが抑制される。
【0018】
また、本発明に係る車両用制御装置は、上記(1)に記載の車両用制御装置において、(3)前記制御手段は、前記物理量と前記目標値との差分が小さくなるほど増大する内燃機関の出力上限値を設定し、前記暖機断続走行モードの実行中、前記出力上限値を超えない範囲で前記機関出力を可変する構成を有する。
【0019】
この構成により、本発明に係る車両用制御装置は、暖機断続走行モード中は、物理量と目標値との差分が小さくなるほど増大する内燃機関の出力上限値を超えない範囲で機関出力が可変とされる。このため、暖機の進行に伴い高まる触媒の浄化能力を上回るような機関出力が出力されることが抑制される。
【0020】
また、本発明に係る車両用制御装置は、上記(2)または(3)に記載の車両用制御装置において、(4)前記出力上限値は、前記触媒の浄化能力を維持可能な値に設定される。
【0021】
この構成により、本発明に係る車両用制御装置は、触媒の浄化能力を上回るような機関出力を出力することを防止することができる。
【0022】
また、本発明に係る車両用制御装置は、上記(1)ないし(4)に記載の車両用制御装置において、(5)前記制御手段は、前記暖機断続走行モードにおける惰性走行時、前記内燃機関を自立運転させる構成を有する。
【0023】
この構成により、本発明に係る車両用制御装置は、制御手段が暖機断続走行モードにおける惰性走行時、内燃機関を自立運転させるので、触媒の暖機を促進することができる。
【0024】
また、本発明に係る車両用制御装置は、上記(1)ないし(5)に記載の車両用制御装置において、(6)前記制御手段は、前記内燃機関の冷却水温、前記触媒の温度、前記内燃機関の油温のいずれか1つを、前記物理量として用いる構成を有する。
【発明の効果】
【0025】
本発明によれば、燃費向上と排気エミッションの向上との両立を図ることができる車両用制御装置を提供することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の第1の実施の形態に係る車両用制御装置が適用されるハイブリッド車両の概略構成図である。
【図2】本発明の第1の実施の形態に係るエンジンの概略構成図である。
【図3】本発明の第1の実施の形態に係るHVECUで実行される断続走行制御のフローチャートである。
【図4】図3の断続走行制御に続くフローチャートである。
【図5】本発明の第1の実施の形態における断続走行制御のタイムチャートであって、(a)は、暖機断続走行モードのタイムチャートであり、(b)は、通常断続走行モードのタイムチャートである。
【図6】本発明の第2の実施の形態に係るHVECUで実行される断続走行制御のフローチャートである。
【図7】図6の断続走行制御に続くフローチャートである。
【図8】本発明の第2の実施の形態における暖機断続走行モードのタイムチャートである。
【発明を実施するための形態】
【0027】
以下、本発明の実施の形態について、図面を参照して説明する。
【0028】
(第1の実施の形態)
本発明の第1の実施の形態では、車両用制御装置を駆動力源として内燃機関と電動機とを搭載した車両、いわゆるハイブリッド車両に適用した例について説明する。
【0029】
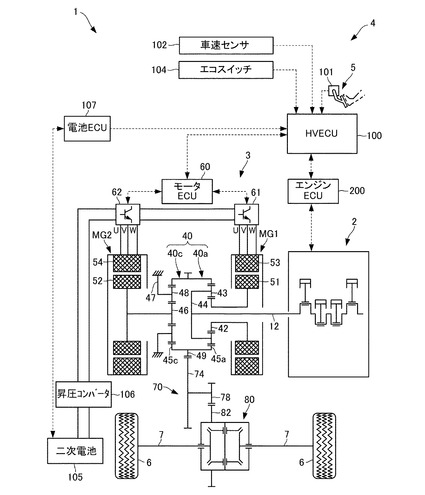
図1に示すように、ハイブリッド車両1は、ハイブリッド車両1の駆動力を発生する駆動力源として、エンジン2と、発電可能な電動機であるモータジェネレータ(以下、単にモータという)MG1、MG2とを備える。また、ハイブリッド車両1は、駆動装置3と、車両用制御装置4とを備えている。
【0030】
駆動装置3は、モータMG1、MG2、動力分割統合機構40、減速機構70および差動機構80を備え、いわゆるハイブリッド・トランスアクスルを構成している。また、駆動装置3は、エンジン2と結合されて動力出力装置(パワープラント)を構成している。
【0031】
エンジン2は、例えばガソリンまたは軽油などの炭化水素系の燃料により動力を出力可能な内燃機関として構成されている。
【0032】
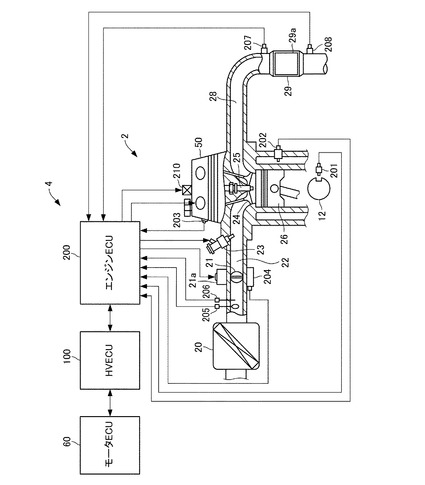
図2に示すように、エンジン2は、エアクリーナ20により清浄された空気をスロットルバルブ21および吸気通路22を介して吸入する。その後、エンジン2は、燃料噴射弁23からガソリンを噴射して吸入された空気とガソリンとを混合し、この混合気を吸気バルブ24を介して燃料室に吸入する。次いで、エンジン2は、吸入した混合気を点火プラグ25による電気火花によって爆発燃焼させて、そのエネルギにより押し下げられるピストン26の往復運動を機関出力軸12の回転運動に変換する。
【0033】
エンジン2の排気通路28上には、一酸化炭素(CO)や炭化水素(HC)、窒素酸化物(NOx)の有害成分を浄化する排ガス浄化触媒(以下、三元触媒という)29aを含む浄化装置29が設けられている。したがって、エンジン2からの排気は、浄化装置29を介して外気へ排出される。本実施の形態における三元触媒29aは、本発明に係る触媒を構成する。
【0034】
三元触媒29aは、同触媒に導入される排気ガスの空燃比(A/F)が略理論空燃比のとき、排気ガス中の未燃成分(HC、CO)を酸化し、同時にNOxを還元する機能により排気ガスを浄化する。エンジン2においては、三元触媒29aを最も有効に機能させるため、後述するA/Fセンサ207およびO2センサ208の各出力値に基づいて、空燃比(実空燃比)が理論空燃比に一致するように空燃比フィードバック制御がエンジンECU200により実行される。
【0035】
また、三元触媒29aが上述したような有害成分を浄化する浄化能力を発揮するには、十分に温められている必要がある。したがって、長時間停止後のエンジン2の始動時には、三元触媒29aの温度(触媒床温)が低いため、温度を上昇させる、すなわち三元触媒29aを活性化させる暖機が必要である。このような三元触媒29aの暖機は、後述する触媒暖機制御を実行することにより行われる。
【0036】
また、エンジン2は、吸気バルブ24の開閉タイミングVTを連続的に変更可能な可変バルブタイミング機構90を備える。可変バルブタイミング機構90は、図示しないベーン式のVVTコントローラと、オイルコントロールバルブとを備え、吸気バルブ24の開閉タイミングVTにおけるインテークカムシャフト(図示せず)の角度を連続的に変更する。
【0037】
また、図1に示すように、機関出力軸12には、動力分割統合機構40が結合されている。エンジン2は、機関出力軸12から駆動輪6に向けて機械的動力(以下、エンジン出力という)を出力する。この機械的動力は、エンジンECU200により制御可能となっている。
【0038】
モータMG1、MG2は、供給された電力を機械的動力に変換する電動機としての機能と、入力された機械的動力を電力に変換する発電機としての機能とを兼ね備えた、いわゆるモータジェネレータである。モータMG1は、主に発電機として用いられ、モータMG2は、主に電動機として用いられる。本実施の形態におけるモータMG2は、本発明に係る電動機を構成する。
【0039】
モータMG1、MG2は、永久磁石式交流同期モータ等で構成されている。モータMG1、MG2は、ステータ53、54と、ロータ51、52とを有している。ステータ53、54は、後述するインバータ61、62から交流電力の供給を受けて回転磁界を形成するようになっている。ロータ51、52は、動力分割統合機構40に結合され、回転磁界に引き付けられて回転するようになっている。モータMG1、MG2には、それぞれロータ51、52の回転角位置を検出するレゾルバ(図示せず)が設けられている。レゾルバは、検出したロータ51、52の回転角位置に応じた信号をモータECU60に送信するようになっている。
【0040】
モータMG1、MG2は、二次電池(蓄電池)105からの電力の供給を受けて電動機として動作することができる(以下、この動作状態を力行という)。一方、図示しないモータ軸が外力により回転している場合には、起電力を生じさせて二次電池105を充電する発電機として動作することができる(以下、この動作状態を回生という)。
【0041】
また、駆動装置3には、インバータ61、62およびモータECU60が設けられている。インバータ61、62は、それぞれステータ53、54に接続されている。インバータ61、62は、二次電池105から供給される直流電力を交流電力に変換して、それぞれ対応するモータMG1、MG2に供給可能に構成されている。また、インバータ61、62は、モータMG1、MG2からの交流電力を直流電力に変換して二次電池105に回収可能に構成されている。インバータ61、62の電力供給および電力回収は、モータECU60により制御される。
【0042】
動力分割統合機構40は、エンジン2およびモータMG1、MG2が出力した機械的動力を駆動軸7に伝達する動力伝達機構である。動力分割統合機構40は、シングルピニオン式の動力分割遊星歯車40aおよび減速遊星歯車40cを備えている。
【0043】
動力分割遊星歯車40aは、エンジン2が出力した機械的動力を、モータMG1を駆動する機械的動力と減速機構70を駆動する機械的動力に分割可能に構成されている。動力分割遊星歯車40aは、サンギヤ42と、プラネタリピニオン43と、プラネタリキャリア44と、リングギヤ45aとを備えている。
【0044】
サンギヤ42は、モータMG1のロータ51に結合されている。プラネタリピニオン43は、プラネタリキャリア44に対して公転および自転可能に支持されている。プラネタリキャリア44は、機関出力軸12に結合されている。このように構成された動力分割遊星歯車40aは、エンジン2のエンジン出力を、プラネタリピニオン43を介してサンギヤ42に伝達する機械的動力と、リングギヤ45aに伝達する機械的動力に分割するようになっている。エンジン2からサンギヤ42に伝達された機械的動力は、モータMG1のロータ51に伝達され、発電に供される。
【0045】
減速遊星歯車40cは、モータMG2が出力した機械的動力を、回転速度を減速しトルクを増大させて減速機構70に伝達可能に構成されている。減速遊星歯車40cは、サンギヤ46と、プラネタリキャリア47と、プラネタリピニオン48と、リングギヤ45cとを備えている。
【0046】
サンギヤ46は、モータMG2のロータ52に結合されている。プラネタリキャリア47は、駆動装置3のハウジングに固定されている。プラネタリピニオン48は、プラネタリキャリア47に対して自転可能に支持されている。このように構成された減速遊星歯車40cは、モータMG2が出力した機械的動力を、プラネタリピニオン48を介して回転速度を減速しトルクを増大させてリングギヤ45cに伝達するようになっている。
【0047】
これら動力分割遊星歯車40aと減速遊星歯車40cとは、同心上に配置されており、リングギヤ45aとリングギヤ45cとが一体に結合されている。リングギヤ45a、45cの外周側には、減速機構70のカウンタドリブンギヤ74と噛み合うカウンタドライブギヤ49が設けられている。動力分割統合機構40は、モータMG2からリングギヤ45cに伝達された機械的動力と、エンジン2からリングギヤ45aに伝達された機械的動力を統合してカウンタドライブギヤ49から減速機構70に伝達する。
【0048】
減速機構70は、カウンタドリブンギヤ74とファイナルドライブギヤ78とからなる。カウンタドリブンギヤ74は、カウンタドライブギヤ49と噛み合い、ファイナルドライブギヤ78は、差動機構80のリングギヤ82と噛み合う。また、これらカウンタドリブンギヤ74とファイナルドライブギヤ78とは、同心上に配置され、一体的に結合されている。減速機構70は、動力分割統合機構40からカウンタドリブンギヤ74に伝達された機械的動力を、回転速度を減速しトルクを増大させて、ファイナルドライブギヤ78から差動機構80に伝達する。
【0049】
差動機構80は、ファイナルドライブギヤ78に噛み合うリングギヤ82を備えている。差動機構80は、減速機構70からリングギヤ82に伝達された機械的動力を左右の駆動輪6に分配して出力する。
【0050】
図1および図2に示すように、車両用制御装置4は、ハイブリッド用電子制御装置(以下、単にHVECUという)100と、エンジンECU200と、モータECU60と、アクセルペダルポジションセンサ101、車速センサ102および水温センサ202を含む各種センサ類と、エコスイッチ104とを含んで構成されている。
【0051】
HVECU100は、例えばCPU、RAM、ROM、入出力インターフェース等を備えるマイクロコンピュータを含んで構成されており、CPUは、RAMの一時記憶機能を利用するとともにROMに予め記憶されたプログラムに従って信号処理を行うようになっている。ROMには、各種制御定数や各種マップ等が予め記憶されている。
【0052】
HVECU100は、エンジン2およびモータMG1、MG2を協調して制御する。また、HVECU100は、アクセルペダルポジションセンサ101および車速センサ102の検出結果に応じて、エンジンECU200およびモータECU60と協働して後述する断続走行制御を実行可能に構成されている。本実施の形態におけるHVECU100は、本発明に係る制御手段を構成する。
【0053】
また、HVECU100は、車両走行中において、エンジン2を始動し、または作動を停止して、エンジン2の作動状態と非作動状態とを切替可能である。非作動状態とは、エンジン出力がゼロであり、かつ機関回転速度がゼロである、すなわち機関出力軸12が静止しており、エンジン2においてエンジンブレーキトルクも生じない状態を意味している。一方、作動状態とは、エンジン2が機関出力軸12から機械的動力(エンジン出力)を出力している状態を意味している。
【0054】
例えば、一定の車速での走行中においてエンジン2を非作動状態にする場合、HVECU100は、モータMG2のモータ回転速度はそのままに、モータ出力を増大させるとともに、その分、エンジン2のエンジン出力をゼロにして、モータMG1のロータ51をリングギヤ45a、45cとは逆の回転方向に空転させて、機関回転速度をゼロにする。このようにして、エンジン2の作動を停止して、非作動状態にすることが可能となっている。
【0055】
また、一定の車速での車両走行中においてエンジン2を作動状態にする場合、HVECU100は、モータMG2のモータ回転速度はそのままに、モータ出力を減少させるとともに、モータMG1のロータ51をリングギヤ45a、45cと同一の回転方向に力行させて、機関回転速度を上昇させて、エンジン2のクランキングを行う。これにより、エンジン2を始動して、作動状態にすることが可能となっている。
【0056】
エンジンECU200は、例えばCPU、RAM、ROM、入出力インターフェース等を備えるマイクロコンピュータを含んで構成されており、CPUは、RAMの一時記憶機能を利用するとともにROMに予め記憶されたプログラムに従って信号処理を行うようになっている。ROMには、各種制御定数や各種マップ等が予め記憶されている。
【0057】
エンジンECU200には、クランクポジションセンサ201、水温センサ202、カムポジションセンサ203、スロットルバルブポジションセンサ204、エアフローメータ205、温度センサ206、A/Fセンサ207、O2センサ208が接続されている。
【0058】
クランクポジションセンサ201は、機関出力軸12の回転位置すなわちクランク角θcrやエンジン回転数Neを検出する。水温センサ202は、エンジン2の冷却水の温度すなわち冷却水温Twを検出する。カムポジションセンサ203は、インテークカムシャフトや排気バルブを開閉するエキゾーストカムシャフトの回転位置すなわちカム角θcaを検出する。スロットルバルブポジションセンサ204は、スロットルバルブ21のスロットル開度THを検出する。エアフローメータ205は、吸気管に取り付けられ、吸入空気の質量流量すなわち吸入空気量Qaを検出する。温度センサ206は、吸気管に取り付けられ、吸気温Taを検出する。A/Fセンサ207は、空燃比に対してリニアな特性を有し、比較的広範囲にわたる空燃比を連続的に検出する。O2センサ208は、理論空燃比を境に出力値が急変する特性(Z特性)を有し、排気ガス中の酸素濃度を起電力におきかえ、空燃比が理論空燃比に対してリーンかリッチかを検出する。これら各センサは、検出結果に応じた信号をエンジンECU200に出力する。
【0059】
エンジンECU200は、エンジン2を駆動するための種々の制御信号、例えば燃料噴射弁23への駆動信号や、スロットル開度THを調節するスロットルモータ21aへの駆動信号、イグニッションコイル210への制御信号、可変バルブタイミング機構90への制御信号などを出力するようになっている。
【0060】
エンジンECU200は、HVECU100と通信しており、HVECU100からの制御信号によりエンジン2を運転制御するとともに、必要に応じてエンジン2の運転状態に関するデータを出力する。
【0061】
モータECU60は、HVECU100から要求トルクおよび要求回転速度に係る信号を受け、インバータ61、62を制御する。モータECU60は、インバータ61、62を制御することにより、モータMG1、MG2のそれぞれについて、ロータ51、52の回転速度(以下、モータ回転速度という)と、ロータ51、52から出力する機械的動力(以下、モータ出力という)とを調整可能である。
【0062】
アクセルペダルポジションセンサ101は、運転者によるアクセルペダル5の操作量を検出する。アクセルペダルポジションセンサ101は、HVECU100に接続され、検出されたアクセルペダル5の操作量(以下、アクセル操作量Accという)に応じた信号をHVECU100に送信するようになっている。
【0063】
車速センサ102は、ハイブリッド車両1の車速Vを検出する。車速センサ102は、HVECU100に接続され、検出された車速Vに応じた信号をHVECU100に送信するようになっている。
【0064】
エコスイッチ104は、運転者がエンジン2による燃料消費の抑制を優先した車両走行(以下、燃費走行という)を選択するために、HVECU100に燃費走行を指示するスイッチである。エコスイッチ104は、車室内のインスツルメントパネル等、運転者により操作可能な場所に設けられている。エコスイッチ104は、運転者の操作により、ON状態とOFF状態とを切替可能に構成されている。また、エコスイッチ104のON状態とOFF状態は、HVECU100により検出される。
【0065】
また、ハイブリッド車両1には、二次電池105と、昇圧コンバータ106と、電池ECU107とが設けられている。二次電池105は、昇圧コンバータ106を介してインバータ61、62に電気的に接続されている。
【0066】
二次電池105は、モータMG1、MG2に供給する電力を貯蔵し、モータMG1、MG2との間で充放電可能に構成されている。昇圧コンバータ106は、二次電池105の電圧を昇圧してインバータ61、62の供給電圧に変換する。電池ECU107は、二次電池105の温度や電圧、充放電電流値等を監視している。
【0067】
また、電池ECU107は、二次電池105の温度や電圧、充放電電流値等の情報から二次電池105の蓄電状態(SOC:state‐of‐charge)および充放電電力を算出している。電池ECU107は、HVECU100に接続され、例えば二次電池105の蓄電状態および充放電電力に応じた信号をHVECU100に送信する等、HVECU100との間で信号のやりとりを行う。
【0068】
このように構成されたハイブリッド車両1では、アクセル操作量Accと車速Vとに基づいてユーザ要求パワーPが算出され、このユーザ要求パワーPに対応する要求動力がカウンタドライブギヤ49に出力されるよう、エンジン2とモータMG1、MG2とが運転制御される。また、ハイブリッド車両1の走行モードとしては、例えばハイブリッド走行モードやモータ走行モードあるいは回生走行モード等がある。
【0069】
ハイブリッド走行モードでは、エンジン2のエンジン出力を利用してモータMG1に発電させつつ、エンジン2およびモータMG2の両者を駆動力源としてハイブリッド車両1を走行させる。モータ走行モードでは、エンジン2を停止させた状態でモータMG2を駆動力源としてハイブリッド車両1を走行させる。回生走行モードは、減速要求等の所定条件が成立した場合に減速機構70を介して入力されるエネルギを利用してモータMG2にて発電を行う走行モードである。
【0070】
また、本実施の形態に係るハイブリッド車両1は、走行中に所定条件が成立すると、HVECU100によって断続走行制御が実行される。この断続走行制御は、車速Vがゼロより大きい(V>0)車速域で実行可能である。つまりハイブリッド車両1が走行している間は、所定条件が成立したことを条件として全ての車速域において断続走行制御が実行可能とされる。断続走行制御が実行されると、ハイブリッド車両1は、エンジン2またはモータMG2、あるいは双方が発生する駆動力を得て走行する加速走行と、エンジン2およびモータMG2から駆動力を出力させずに惰性で走行する惰性走行とを、車速Vに応じて決定される車速範囲Rで繰り返し行って走行する断続走行が可能となる。
【0071】
具体的には、HVECU100は、ハイブリッド車両1の走行中に所定条件が成立すると、制御車速VSと、車速範囲Rの上限値である上限車速VHと、車速範囲Rの下限値である下限車速VLを設定するようになっている。ここで、エコスイッチ104がONとされ、かつユーザ要求パワーPが略一定であることが、上記所定条件となっている。ユーザ要求パワーPは、アクセル操作量Accをパラメータとして車速Vとユーザ要求パワーPとの関係を予め実験的に求めて記憶されたマップを参照することによりHVECU100によって算出される。ユーザ要求パワーPが略一定である一例としては、例えば一定の車速Vで走行中に運転者によるアクセル操作量Accが一定である場合等が挙げられる。アクセル操作量Accが一定のうちには、アクセル操作量Accがゼロの場合も含まれる。ここで、ユーザ要求パワーPが略一定であるとは、多少の変動はあるものの、ある所定時間内においてユーザ要求パワーが予め定められた所定範囲内(例えば、±3km/h)に維持される状態を意味する。
【0072】
また、HVECU100は、エコスイッチON後の走行中にユーザ要求パワーPが略一定となった時点の車速Vを制御車速VSとして設定し、この制御車速VSを基準に予め定められた車速だけ高車速側および低車速側にそれぞれ上限車速VH、下限車速VLを設定するようになっている。車速範囲Rは、設定された上限車速VHおよび下限車速VLにより定まるようになっている。より具体的には、車速範囲Rは、上限車速VHおよび下限車速VLを制御車速VSからどれだけ高車速側および低車速側に設定するかにより拡大されるか、縮小されるかが定まる。ここで、車速範囲Rは、例えば車速Vが大きくなるほど拡大されるようにしてもよい。このように、車速範囲Rは、車速Vに応じて決定されるようになっている。
【0073】
また、HVECU100は、上限車速VHと制御車速VSとの車速幅、および制御車速VSと下限車速VLとの車速幅が同一となるよう、上限車速VHおよび下限車速VLを設定している。すなわち、制御車速VSは、上限車速VHと下限車速VLとの中間に設定されるようになっている。
【0074】
また、HVECU100は、例えば冷却水温Twが予め定められた暖機実行温度以下である場合にエンジン2を始動し、エンジン2を予め定められた回転数(例えば、1500rpm〜1800rpm程度)で自立運転させる触媒暖機制御を実行するようになっている。これにより、排気ガスの温度を上昇させて三元触媒29aの活性化を促進させることが可能となる。なお、冷却水温Twと暖機実行温度とを比較する代わりに、吸入空気量Qaや冷却水温Tw、空燃比AF、点火時期の遅角量等に基づいてエンジンECU200等により推定される三元触媒29aの温度(触媒床温)と所定の基準温度とを比較して触媒暖機制御を実行すべきか否かを判定してもよい。三元触媒29aの温度(触媒床温)は、例えば三元触媒29aの近傍に触媒温度センサを設けて、この触媒温度センサにより直接検知してもよい。また、触媒暖機制御においては、点火時期を通常時より遅角させたり、燃料噴射量を通常時よりも増量させる制御等を行って早期に暖機を完了するようにしてもよい。
【0075】
また、HVECU100は、触媒暖機制御実行中に、三元触媒29aの暖機の進行状態と相関する物理量である冷却水温Twが予め定められた目標値としての目標暖機温度Toに達したことを条件に、三元触媒29aの暖機が完了したものと判断するようになっている。ここで、上記物理量としては、冷却水温Twの他、例えば三元触媒29aの温度(触媒床温)やエンジン2の油温等を用いることもできる。この場合、三元触媒29aの温度(触媒床温)は、上述した通り、エンジンECU200等による推定あるいは触媒温度センサを設けることで検知可能であり、エンジン2の油温は、油温センサを設けることで検知可能である。
【0076】
さらに、HVECU100は、触媒暖機制御実行中に断続走行制御が実行された場合には、三元触媒29aの暖機の進行状態に応じて、暖機断続走行モードと通常断続走行モードとを切り替えるようになっている。具体的には、HVECU100は、冷却水温Twが目標暖機温度Toに達したことを条件に三元触媒29aの暖機が完了したものと判断し、暖機断続走行モードから通常断続走行モードに切り替える。
【0077】
ここで、暖機断続走行モードは、エンジン2を予め定められた回転数で自立運転させて三元触媒29aの暖機を行うとともに、モータMG2が発生する駆動力を用いて断続走行を実行するモードである。通常断続走行モードは、エンジン2およびモータMG2が発生する駆動力を用いて断続走行を実行するモードである。
【0078】
次に、図3〜図5(a)、(b)を参照して、本実施の形態に係る触媒暖機制御実行中の断続走行制御について説明する。
【0079】
図3および図4に示す断続走行制御の処理フローは、ハイブリッド車両1の走行中に所定の時間間隔で実行されるものである。特に、本処理フローは、触媒暖機制御実行中に実行される。
【0080】
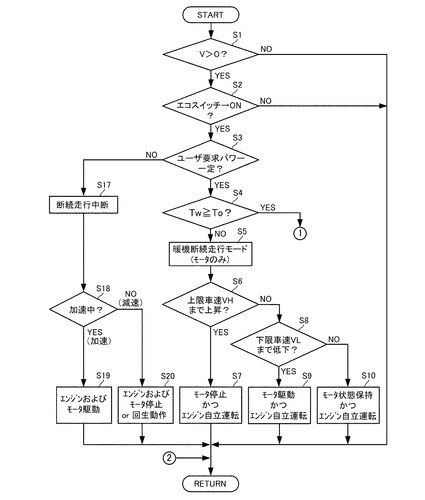
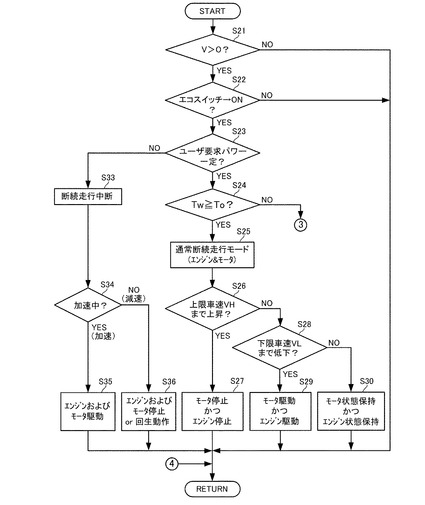
図3に示すように、まずHVECU100は、車速Vがゼロより大きい(V>0)か否かを判定する(ステップS1)。V>0でないと判定された場合、HVECU100は、断続走行制御を実行することなく本処理を終了する。
【0081】
HVECU100は、V>0であると判定された場合、エコスイッチ104がON状態か否かを判定する(ステップS2)。HVECU100は、エコスイッチ104がON状態でない、つまりエコスイッチ104がOFF状態であると判定された場合には、運転者により燃費走行が選択されていないと判断して断続走行制御を実行することなく本処理を終了する。
【0082】
HVECU100は、エコスイッチ104がON状態であると判定された場合には、ユーザ要求パワーPが略一定か否かを判定する(ステップS3)。HVECU100は、ユーザ要求パワーPが略一定でない場合には、前回周期で断続走行が実行されているのであれば、その断続走行を中断し(ステップS17)、ステップS18に移行する。ステップS18において、HVECU100は、ハイブリッド車両1が加速中か否かを判定する。加速中か否かは、例えば車速センサ102で検出された車速Vの変化量に基づき判定される。
【0083】
HVECU100は、ハイブリッド車両1が加速中であると判定された場合には、ユーザ要求パワーPに基づき所望の駆動力が発生するよう、エンジン2およびモータMG2を協調して駆動する(ステップS19)。なお、モータ走行モード中や三元触媒29aの暖機が完了していない場合には、モータMG2のみを駆動してユーザ要求パワーPに基づく所望の駆動力を発生させる。
【0084】
一方、HVECU100は、ハイブリッド車両1が加速中でないと判定された場合には、ハイブリッド車両1が減速状態であると判断してエンジン2を停止するとともに、モータMG2の駆動を停止、あるいは駆動輪6から伝わる動力によりモータMG2を回転させて発電機として動作(回生動作)させる(ステップS20)。
【0085】
HVECU100は、ステップS3において、ユーザ要求パワーPが略一定であると判定された場合には、冷却水温Twが目標暖機温度To以上か否かを判定する(ステップS4)。HVECU100は、冷却水温Twが目標暖機温度To以上でないと判定した場合には、暖機断続走行モードが実行される(ステップS5)。
【0086】
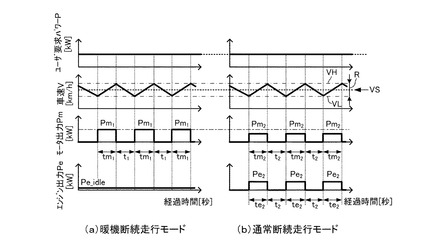
具体的には、図5(a)に示すように、HVECU100は、エンジン2を自立運転させるとともに、上限車速VHと下限車速VLとで定まる車速範囲Rで加速走行と惰性走行を繰り返し実行するようモータMG2の駆動を制御する。この暖機断続走行モードでは、加速走行時、モータMG2のモータ出力Pmをモータ出力Pm1とする。一方、惰性走行時は、モータMG2のモータ出力Pmがゼロとされる。
【0087】
また、エンジン2のエンジン出力Peは、自立運転に基づき、駆動輪6に向けて機械的動力を出力しないエンジン出力Pe_idleとされる。これにより、三元触媒29aの暖機が完了するまでの間、モータMG2の駆動によって上限車速VHと下限車速VLとの間で加速走行と惰性走行が繰り返される。本実施の形態におけるエンジン出力Peは、本発明における機関出力に相当する。
【0088】
ここで、本実施の形態では、暖機断続走行モード中のエンジン出力Peをエンジン出力Pe_idleとしたが、三元触媒29aの浄化能力を上回ることのないような比較的低負荷なエンジン出力としてもよい。
【0089】
HVECU100は、ステップS4において、冷却水温Twが目標暖機温度To以上であると判定した場合には、図4に示すステップS11の通常断続走行モードに移行する。通常断続走行モードについては、後述する。
【0090】
次いで、HVECU100は、ステップS6において、車速Vが上限車速VHまで上昇したか否かを判定する。HVECU100は、車速Vが上限車速VHまで上昇したと判定した場合には、エンジン2の自立運転を継続するとともに、モータMG2の駆動を停止(ステップS7)して本処理を終了する。すなわち、HVECU100は、車速Vが上限車速VHに達したことを条件としてハイブリッド車両1を加速走行から惰性走行に移行させる。
【0091】
一方、HVECU100は、ステップS6において、車速Vが上限車速VHまで上昇していないと判定した場合には、車速Vが下限車速VLまで低下したか否かを判定する(ステップS8)。HVECU100は、車速Vが下限車速VLまで低下したと判定した場合には、エンジン2の自立運転を継続するとともに、モータMG2をモータ出力Pm1で駆動(ステップS9)して本処理を終了する。すなわち、HVECU100は、車速Vが下限車速VLに達したことを条件としてハイブリッド車両1を惰性走行から加速走行に移行させる。
【0092】
他方、HVECU100は、ステップS8において、車速Vが下限車速VLまで低下していないと判定した場合には、エンジン2の自立運転を継続するとともに、モータMG2の駆動状態(モータ状態)を保持して(ステップS10)本処理を終了する。すなわち、ハイブリッド車両1が加速走行中であれば、モータ出力Pm1でのモータMG2の駆動を維持し、これとは逆にハイブリッド車両1が惰性走行中であればモータMG2の駆動停止を維持する。ただし、加速走行中および惰性走行中のいずれであっても、エンジン2は自立運転が継続される。
【0093】
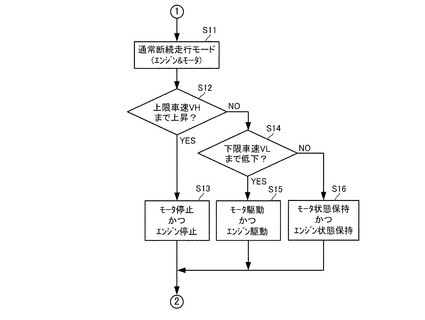
次に、図4を参照して、通常断続走行モードについて説明する。
【0094】
図4に示すように、HVECU100は、冷却水温Twが目標暖機温度To以上であると判定した場合(図3のステップS4でYES)には、通常断続走行モードが実行される(ステップS11)。つまり、HVECU100は、冷却水温Twが目標暖機温度Toに達したことを条件に暖機断続走行モードから通常断続走行モードに切り替える。
【0095】
具体的には、図5(b)に示すように、HVECU100は、上限車速VHと下限車速VLとで定まる車速範囲Rで加速走行と惰性走行を繰り返し実行するようエンジン2とモータMG2を協調して制御する。この通常断続走行モードでは、加速走行時、モータMG2のモータ出力Pmをモータ出力Pm1より小さいモータ出力Pm2とし、かつエンジン2のエンジン出力Peをエンジン出力Pe_idleよりも大きいエンジン出力Pe2とする。これらモータ出力Pm2およびエンジン出力Pe2は、ユーザ要求パワーPに応じて所定の配分比で分配される。
【0096】
次いで、HVECU100は、ステップS12において、車速Vが上限車速VHまで上昇したか否かを判定する。HVECU100は、車速Vが上限車速VHまで上昇したと判定した場合には、エンジン2およびモータMG2の駆動を停止して(ステップS13)本処理を終了する。すなわち、HVECU100は、車速Vが上限車速VHに達したことを条件としてハイブリッド車両1を加速走行から惰性走行に移行させる。
【0097】
一方、HVECU100は、ステップS12において、車速Vが上限車速VHまで上昇していないと判定した場合には、車速Vが下限車速VLまで低下したか否かを判定する(ステップS14)。HVECU100は、車速Vが下限車速VLまで低下したと判定した場合には、エンジン2およびモータMG2をそれぞれエンジン出力Pe2、モータ出力Pm2で駆動して(ステップS15)本処理を終了する。すなわち、HVECU100は、車速Vが下限車速VLに達したことを条件としてハイブリッド車両1を惰性走行から加速走行に移行させる。
【0098】
他方、HVECU100は、ステップS14において、車速Vが下限車速VLまで低下していないと判定した場合には、エンジン2の駆動状態(エンジン状態)、モータMG2の駆動状態(モータ状態)をそれぞれ保持して(ステップS16)本処理を終了する。すなわち、ハイブリッド車両1が加速走行中であれば、エンジン出力Pe2でのエンジン2の駆動を維持するとともに、モータ出力Pm2でのモータMG2の駆動を維持する。これとは逆にハイブリッド車両1が惰性走行中であれば、エンジン2およびモータMG2の駆動停止を維持する。
【0099】
ここで、図5(a)、(b)では、暖機断続走行モードにおける加速走行の継続時間をtm1、惰性走行の継続時間t1とし、通常断続走行モードにおける加速走行の継続時間をtm2、te2、惰性走行の継続時間をt2としている。暖機断続走行モードおよび通常断続走行モードにおける加速走行と惰性走行の継続時間を同等とするには、継続時間tm1と継続時間tm2、te2とを一致させるとともに、継続時間t1と継続時間t2とを一致させる。
【0100】
以上のように、本実施の形態に係る車両用制御装置4は、冷却水温Twが目標暖機温度Toに達したことを条件に暖機が完了したものとHVECU100によって判断され、暖機断続走行モードから通常断続走行モードに切り替えられる。したがって、三元触媒29aの暖機の完了有無に応じて、エンジン2およびモータMG2の駆動状態を好適に制御することができ、三元触媒29aの浄化能力やエンジン2の運転効率等を考慮した断続走行を実現することができる。この結果、本実施の形態に係る車両用制御装置4は、燃費向上と排気エミッションの向上との両立を図ることができる。
【0101】
また、本実施の形態に係る車両用制御装置4は、暖機断続走行モード中の惰性走行時においてもエンジン2を自立運転させるので、三元触媒29aの暖機を促進することができる。
【0102】
なお、本実施の形態では、断続走行制御においてユーザ要求パワーPが略一定となった時点の車速Vを制御車速VSとして設定し、この制御車速VSを基準に予め定められた車速だけ高車速側および低車速側にそれぞれ上限車速VH、下限車速VLを設定するようにしたが、これに限らず、例えばユーザ要求パワーPが略一定となった時点の車速Vを上限車速VHとして設定し、これを基準に下限車速VL、車速範囲Rおよび制御車速VSを設定するようにしてもよい。具体的には、HVECU100は、上限車速VHの設定と同時あるいは設定後に、上限車速VHから予め定められた車速だけ減じた値を下限車速VLを設定する。また、HVECU100は、上限車速VHおよび下限車速VLの設定と同時あるいは設定後に、上限車速VHから予め定められた車速だけ低車速側に制御車速VSを設定する。このとき、制御車速VSは、上限車速VHと下限車速VLとの中間に設定されるのが好ましい。
【0103】
(第2の実施の形態)
次に、図6〜図8を参照して、本発明の第2の実施の形態について説明する。
【0104】
特に本実施の形態は、上述の第1の実施の形態とは暖機断続走行モードの制御内容が異なるが、他の構成は同様である。したがって、第1の実施の形態と同様の構成には同一の符号を付して説明を省略する。
【0105】
本実施の形態に係るHVECU100は、暖機断続走行モードの実行中、冷却水温Twに基づき、加速走行時のエンジン2のエンジン出力Peを可変させるようになっている。
【0106】
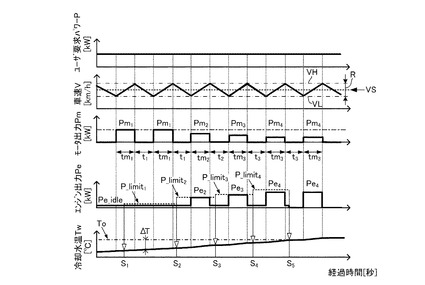
具体的には、図8に示すように、HVECU100は、冷却水温Twに応じたエンジン2の出力上限値P_limitを設定するようになっている。この出力上限値P_limitは、三元触媒29aの暖機の進行状態と相関する物理量が大きくなるほど、すなわち冷却水温Twの上昇に伴い増大するよう設定される。また、出力上限値P_limitは、例えば予め実験的に求めて記憶された冷却水温Twと出力上限値P_limitとの関係マップ等を参照することにより決定される。
【0107】
ここで、出力上限値P_limitは、三元触媒29aの浄化能力を維持可能な値に設定される。すなわち、出力上限値P_limitは、エンジン2が当該出力上限値P_limitで運転しても十分に三元触媒29aで排気ガス中の一酸化炭素(CO)や炭化水素(HC)、窒素酸化物(NOx)を浄化可能なエンジン出力Peとして設定されるものであり、エンジン2の性能や三元触媒29aの性能等により定めることができる。
【0108】
また、この出力上限値P_limitは、暖機の進行に伴い三元触媒29aの浄化能力が高まることから、冷却水温Twの上昇とともに段階的に大きくなるように設定される。なお、出力上限値P_limitは、図8に示すように段階的に設定される場合に限らず、例えば冷却水温Twと相関して無段階に設定してもよい。
【0109】
HVECU100は、暖機断続走行モードの実行中、この出力上限値P_limitを超えない範囲でエンジン出力Peを可変するようになっている。例えば、図8に示すように、経過時間S1ないし経過時間S2の間は、暖機初期時でありエンジン2が比較的低温である。このような暖機初期時は、熱効率が低くエンジン2の運転効率が低下するため、エンジン出力Peをエンジン出力Pe_idleとしてモータ出力Pm1とする。すなわち、暖機初期時は、モータ出力Pm1によって断続走行が行われる。
【0110】
一方、経過時間S2以後は、暖機が進行しエンジン2も比較的温まってきていることから、断続走行に際し、エンジン出力Peを用いても暖機初期時のように運転効率が低下することがない。したがって、この場合には、出力上限値P_limitを超えない範囲でエンジン出力Peを用いるとともに、これを補うモータ出力Pmによって断続走行が行われる。
【0111】
本実施の形態では、暖機断続走行モードの実行中において、エンジン2の運転効率が低下するか否かの基準として、例えば後述する基準水温Ttを用いることとした。
【0112】
次に、本実施の形態に係る触媒暖機制御実行中の断続走行制御について説明する。
【0113】
図6および図7に示す断続走行制御の処理フローは、ハイブリッド車両1の走行中に所定の時間間隔で実行されるものである。特に、本処理フローは、触媒暖機制御実行中に実行される。また、図7に示すステップS21〜ステップS36は、第1の実施の形態における図3に示すステップS1〜ステップS4、ステップS11〜ステップS20と略同様である。したがって、以下においては、第1の実施の形態と異なるステップS41以降の各ステップについて説明する。ただし、ステップS35については、一部異なるので、これについては後述する。
【0114】
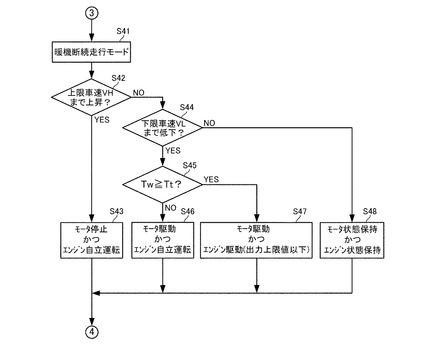
図6および図7に示すように、HVECU100は、冷却水温Twが目標暖機温度To以上でないと判定した場合(ステップS24でNO)には、暖機断続走行モードが実行される(ステップS41)。
【0115】
本実施の形態における暖機断続走行モードでは、加速走行時、暖機の進行状態に応じてエンジン出力Peをエンジン出力Pe_idleないしエンジン出力Pe4のように可変とし、これに応じてモータ出力Pmをモータ出力Pm1ないしモータ出力Pm4とする。一方、惰性走行時は、エンジン出力Peがエンジン出力Pe_idleとされるとともに、モータ出力Pmがゼロとされる。
【0116】
このように、本実施の形態における暖機断続走行モードでは、暖機の進行状態に応じて、モータMG2のみの駆動力によって断続走行を行うか、あるいはエンジン2およびモータMG2の駆動力によって断続走行を行うかが決定される。なお、惰性走行時のエンジン出力Peは、エンジン出力Pe_idleに限らず、三元触媒29aの浄化能力を上回ることのないような比較的低負荷なエンジン出力としてもよい。
【0117】
次いで、HVECU100は、ステップS42において、車速Vが上限車速VHまで上昇したか否かを判定する。HVECU100は、車速Vが上限車速VHまで上昇したと判定した場合には、エンジン2の自立運転を継続するとともに、モータMG2の駆動を停止して(ステップS43)本処理を終了する。すなわち、HVECU100は、車速Vが上限車速VHに達したことを条件としてハイブリッド車両1を加速走行から惰性走行に移行させる。
【0118】
一方、HVECU100は、ステップS42において、車速Vが上限車速VHまで上昇していないと判定した場合には、車速Vが下限車速VLまで低下したか否かを判定する(ステップS44)。HVECU100は、車速Vが下限車速VLまで低下したと判定した場合には、冷却水温Twが基準水温Tt以上であるか否かを判定する(ステップS45)。ここで、基準水温Ttとは、エンジン2の運転効率を考慮した水温であり、例えば基準水温Ttより低い水温状態のときには、暖機が不十分であり熱効率が低いことからエンジン出力Peによらずモータ出力Pmによって断続走行を行う。
【0119】
HVECU100は、冷却水温Twが基準水温Tt以上でないと判定した場合には、エンジン2の自立運転を継続するとともに、モータMG2をモータ出力Pm1で駆動して(ステップS46)本処理を終了する。すなわち、HVECU100は、車速Vが下限車速VLに達したことを条件としてハイブリッド車両1を惰性走行から加速走行に移行させる。
【0120】
一方、HVECU100は、冷却水温Twが基準水温Tt以上であると判定した場合には、エンジン2を出力上限値P_limit以下のエンジン出力Pe2ないしエンジン出力Pe4で駆動するとともに、ユーザ要求パワーPを出力可能にするため、エンジン出力Pe2ないしエンジン出力Pe4を補うのに必要なモータ出力Pm2ないしモータ出力Pm4でモータMG2を駆動して(ステップS47)本処理を終了する。
【0121】
他方、HVECU100は、ステップS44において、車速Vが下限車速VLまで低下していないと判定した場合には、エンジン2の駆動状態(エンジン状態)、モータMG2の駆動状態(モータ状態)をそれぞれ保持して(ステップS48)本処理を終了する。すなわち、冷却水温Twが基準水温Ttより低い状態でのハイブリッド車両1の加速走行中であれば、エンジン2の自立運転を維持するとともに、モータ出力Pm1でのモータMG2の駆動を維持する。また、冷却水温Twが基準水温Tt以上の状態でのハイブリッド車両1の加速走行中であれば、エンジン出力Pe2ないしエンジン出力Pe4でのエンジン2の駆動を維持するとともに、モータ出力Pm2ないしモータ出力Pm4でのモータMG2の駆動を維持する。これらとは逆にハイブリッド車両1が惰性走行中であれば、エンジン2の自立運転を維持するとともに、モータMG2の駆動停止を維持する。
【0122】
ところで、本実施の形態の図6に示すステップS35では、第1の実施の形態と同様、HVECU100は、ユーザ要求パワーPに基づき所望の駆動力が発生するよう、エンジン2およびモータMG2を協調して駆動する。ただし、モータ走行モード中である場合には、モータMG2のみを駆動してユーザ要求パワーPに基づく所望の駆動力を発生させる。また、三元触媒29aの暖機が完了していない場合には、暖機の進行状態に応じて、モータMG2のみを駆動するか、あるいはエンジン2およびモータMG2を協調して駆動させるかが適宜選択される。
【0123】
次に、図8に示すタイムチャートを参照して、本実施の形態における暖機断続走行モード実行中の断続走行について説明する。
【0124】
図8に示すように、経過時間S1までは、冷却水温Twが低温であるため、エンジン2はエンジン出力Pe_idleで自立運転される。次いで、経過時間S1に達すると、暖機の進行に伴い冷却水温Twが上昇するため、これに応じてエンジン2の出力上限値P_limit1が設定される。ここでは、出力上限値P_limit1がエンジン出力Pe_idleよりも大きい値とされているが、未だ冷却水温Twが基準水温Ttよりも低いため熱効率も低い。このため、出力上限値P_limit1でエンジン2を駆動させてもかえってエンジン2の運転効率が下がるおそれがあるため、経過時間S2までは燃費を考慮してモータMG2をモータ出力Pm1で駆動する。すなわち、ユーザ要求パワーPに基づく所望の駆動力をモータMG2のモータ出力Pm1により発生させている。このとき、エンジン2は、継続してエンジン出力Pe_idleで自立運転されている。
【0125】
次いで、経過時間S2に達すると、出力上限値P_limit1よりも大きな出力上限値P_limit2が設定される。このとき、冷却水温Twは、暖機の進行に伴い基準水温Tt以上となっている。したがって、経過時間S2ないし経過時間S3の間は、加速走行時におけるエンジン出力Peが出力上限値P_limit2と同等のエンジン出力Pe2とされる。このとき、モータ出力Pmは、エンジン出力Pe2で足りない駆動力を発生させるべく、モータ出力Pm1より小さなモータ出力Pm2とされる。
【0126】
その後、経過時間S3に達すると、出力上限値P_limit2よりも大きな出力上限値P_limit3が設定される。したがって、経過時間S3ないし経過時間S4の間は、加速走行時におけるエンジン出力Peが出力上限値P_limit3と同等のエンジン出力Pe3とされる。このとき、モータ出力Pmは、エンジン出力Pe3で足りない駆動力を発生させるべく、モータ出力Pm2より小さなモータ出力Pm3とされる。
【0127】
次に、経過時間S4に達すると、出力上限値P_limit3よりも大きな出力上限値P_limit4が設定される。したがって、経過時間S4ないし経過時間S5の間は、加速走行時におけるエンジン出力Peが出力上限値P_limit4まで出力可能となるが、燃費を考慮してエンジン出力Peが出力上限値P_limit4より小さいエンジン出力Pe4とされる。このとき、モータ出力Pmは、エンジン2とモータMG2との配分比に応じたモータ出力Pm4とされる。
【0128】
その後、経過時間S5に達すると、冷却水温Twが目標暖機水温Toに達し、三元触媒29aの暖機が完了する。このとき、同時に惰性走行時のエンジン出力Peがエンジン出力Pe_idleからゼロとされる。したがって、その後(経過時間S5以降)は、エンジン出力Pe4とモータ出力Pm4とで加速走行時の駆動力を発生させるとともに、惰性走行時のエンジン出力Peおよびモータ出力Pmをゼロとする通常断続走行モードに移行する。
【0129】
上述した図8に示すタイムチャートにおけるエンジン出力Pe2ないしエンジン出力Pe4は、一例であってこれに限定されるものではない。すなわち、エンジン出力Pe2ないしエンジン出力Pe4は、例えば低速走行時か高速走行時であるか等のハイブリッド車両1の走行状態やエンジン2の諸元値等によって、出力上限値P_limitを超えない範囲で適宜最適な値とされる。
【0130】
以上のように、本実施の形態に係る車両用制御装置4は、冷却水温Twが目標暖機温度Toに達したことを条件に暖機が完了したものとHVECU100によって判断され、暖機断続走行モードから通常断続走行モードに切り替えられる。また、暖機断続走行モードの実行中は、冷却水温Twに基づき、加速走行時のエンジン出力Peが可変させられる。
【0131】
このため、例えば暖機初期時(例えば、図8に示す経過時間S1ないし経過時間S2)のような低温域でハイブリッド車両1を断続走行させる場合には、熱効率が低くエンジン2の運転効率が低下するため、エンジン2のエンジン出力PeによらずモータMG2のモータ出力Pmによって断続走行を行うことができる。これにより暖機初期時の燃費が向上する。一方、暖機が進行すると、冷却水温Twが上昇し三元触媒29aの浄化能力も高まることから、この浄化能力を上回らない範囲でエンジン出力Peを出力可能となる。この場合、三元触媒29aの浄化能力を維持しつつ、エンジン2とモータMG2の出力を用いて断続走行を行うことができる。
【0132】
したがって、本実施の形態に係る車両用制御装置4は、暖機の進行状態に応じてエンジン2およびモータMG2の出力を好適に制御することができ、燃費向上と排気エミッションの向上との両立を図ることができる。
【0133】
また、本実施の形態に係る車両用制御装置4は、暖機断続走行モード中は、冷却水温Twが上昇するほど増大するエンジン2の出力上限値P_limitを超えない範囲でエンジン出力Peが可変とされる。このため、暖機の進行に伴い高まる三元触媒29aの浄化能力を上回るようなエンジン出力Peが出力されることが抑制される。
【0134】
なお、本実施の形態において、HVECU100は、冷却水温Twに応じて出力上限値P_limitを設定したが、例えば図8に示すように、冷却水温Twと目標暖機温度Toとの差分ΔTに応じて出力上限値P_limitを設定してもよい。具体的には、出力上限値P_limitは、差分ΔTが小さくなるほど増大するよう設定される。この場合であっても、上述した本実施の形態と同様の効果を得ることができる。
【0135】
以上説明したように、本発明に係る車両用制御装置は、燃費向上と排気エミッションの向上との両立を図ることができ、駆動力源として内燃機関および電動機を備えた車両に適用される車両用制御装置に有用である。
【符号の説明】
【0136】
1 ハイブリッド車両(車両)
2 エンジン(内燃機関)
4 車両用制御装置
28 排気通路
29a 三元触媒(触媒)
60 モータECU
100 HVECU(制御手段)
200 エンジンECU
MG2 モータ(電動機)
【技術分野】
【0001】
本発明は、駆動力源として内燃機関および電動機を備えた車両に適用される車両用制御装置に関する。
【背景技術】
【0002】
従来、この種の車両用制御装置が適用される車両として、内燃機関およびモータジェネレータ(以下、単にモータという)を駆動力源として備え、車両の走行状態に応じて内燃機関が間欠的に運転および停止されるよう制御されるハイブリッド車両が知られている。
【0003】
近年、このようなハイブリッド車両の中には、例えば内燃機関により駆動力を発生させて車両を走行させる加速走行と、内燃機関に機械的動力を出力させることなく車両の慣性力により惰性で車両を走行させる、いわゆるコーストダウン(以下、惰性走行という)とを交互に行う断続走行により予め設定された目標車速に従って車両を走行させるものもある。このような断続走行を実施することによって、内燃機関を継続的に運転して車両を定速走行させる場合に比べて、燃料消費を抑制した低燃費運転が実現可能である。
【0004】
ところで、一般に、このようなハイブリッド車両にあっても、燃料を燃焼して内燃機関を駆動させているため、排気ガスを排出することに変わりはなく、この排気ガスを浄化するために触媒が設けられている。また、このような触媒は、浄化作用を発揮するために十分に温められている必要がある。したがって、例えば長時間停止後の内燃機関の始動時等には、触媒の温度を上昇させるための暖機走行が行われることが知られている。同暖機走行中は、内燃機関を所定のアイドル回転数で自立運転させるとともに、蓄電池に蓄えられた電力を用いてモータを駆動することによって車両を走行させる。
【0005】
ところが、蓄電池の残容量が所定値以下に低下した状態では、暖機走行中であっても、蓄電池の充電に必要な電力を発電するだけの出力、あるいは車両を走行させるために必要な出力で内燃機関を運転させなければならない。このような場合、暖機走行中の触媒の浄化能力を上回る量の排気ガスが排出されることにより排気エミッションが悪化するおそれがある。
【0006】
近年、暖機走行中における排気エミッションの向上を目的としたハイブリッド車両として、蓄電池の残容量に応じて、モータの駆動力のみで車両を走行させるEV走行を禁止するよう制御する車両用制御装置を備えたものが知られている(例えば、特許文献1参照)。
【0007】
この従来の車両用制御装置は、EV走行を選択するEVスイッチがONとなったときは、蓄電池の残容量が第1の閾値より大きい場合にのみEV走行を許可するとともに、EV走行中に蓄電池の残容量が第1の閾値よりも小さい第2の閾値を下回った場合には、EV走行の継続を禁止する。したがって、この車両用制御装置によれば、暖機走行中に蓄電池の残容量が電力供給可能な下限値を下回ることがなく、暖機走行中のモータの駆動を確保することができる。このため、暖機走行中に内燃機関が自立運転を維持する以上の出力で運転されることがなく、暖機走行中に触媒の浄化能力を上回る量の排気ガスが排出されることを防止することができ、排気エミッションを向上させることが可能である。
【先行技術文献】
【特許文献】
【0008】
【特許文献1】特開2005−51863号公報
【発明の概要】
【発明が解決しようとする課題】
【0009】
しかしながら、特許文献1に記載の従来の車両用制御装置にあっては、例えば上述したような断続走行を行うことについて考慮されておらず、したがって暖機走行中に断続走行に切り替わった場合にモータおよび内燃機関の運転状態をどのように制御するかについても当然考慮されていない。このため、この従来の車両用制御装置においては、断続走行による燃費向上と暖機時における排気エミッションの向上との両立を図ることができないという問題があった。
【0010】
本発明は、上述のような従来の問題を解決するためになされたもので、燃費向上と排気エミッションの向上との両立を図ることができる車両用制御装置を提供することを目的とする。
【課題を解決するための手段】
【0011】
本発明に係る車両用制御装置は、上記目的達成のため、(1)車両の駆動力を発生する駆動力源として内燃機関および電動機と、前記内燃機関の排気通路上に設けられた触媒とを備え、前記駆動力を得て走行する加速走行と前記駆動力源から前記駆動力を出力せずに惰性で走行する惰性走行とを、車速に応じて決定される車速範囲で繰り返し行って走行する断続走行が可能な車両に用いられる車両用制御装置であって、前記内燃機関を予め定められた回転数で自立運転させて前記触媒の暖機を行うとともに前記電動機が発生する駆動力または前記電動機および前記内燃機関が発生する駆動力を用いて前記断続走行を実行する暖機断続走行モードと、前記内燃機関および前記電動機が発生する駆動力を用いて前記断続走行を実行する通常断続走行モードとを有し、前記暖機の進行状態と相関する物理量が予め設定された目標値に達したことを条件に前記暖機が完了したものと判断し、前記暖機断続走行モードから前記通常断続走行モードに切り替える制御手段を備え、前記制御手段は、前記暖機断続走行モードの実行中、前記物理量に基づき、加速走行時の前記内燃機関の機関出力を可変させる構成を有する。
【0012】
この構成により、本発明に係る車両用制御装置は、制御手段が、暖機の進行状態と相関する物理量が予め設定された目標値に達したことを条件に暖機が完了したものと判断し、暖機断続走行モードから通常断続走行モードに切り替える。また、暖機断続走行モードの実行中は、暖機の進行状態に相関する物理量に基づき、断続走行における加速走行時の内燃機関の機関出力が可変させられる。
【0013】
このため、例えば暖機初期時のような低温域で車両を断続走行させる場合には、熱効率が低く内燃機関の運転効率が低下するため、機関出力によらず電動機の出力によって断続走行を行うことができる。これにより暖機初期時の燃費が向上する。一方、暖機が進行すると、上記物理量が大きくなり触媒の浄化能力も高まることから、この浄化能力を上回らない範囲で機関出力を出力可能となる。この場合、触媒の浄化能力を維持しつつ、内燃機関と電動機の出力を用いて断続走行を行うことができる。
【0014】
したがって、本発明に係る車両用制御装置は、暖機の進行状態に応じて電動機および内燃機関の出力を好適に制御することができ、燃費向上と排気エミッションの向上との両立を図ることができる。
【0015】
なお、物理量に基づき機関出力を可変させるとは、例えば物理量自体の変化に基づき機関出力を可変させる場合や、物理量と予め設定された目標値との差分の変化に基づき機関出力を可変させる場合を含む概念である。
【0016】
また、本発明に係る車両用制御装置は、上記(1)に記載の車両用制御装置において、(2)前記制御手段は、前記物理量が大きくなるほど増大する内燃機関の出力上限値を設定し、前記暖機断続走行モードの実行中、前記出力上限値を超えない範囲で前記機関出力を可変する構成を有する。
【0017】
この構成により、本発明に係る車両用制御装置は、暖機断続走行モード中は、物理量が大きくなるほど増大する内燃機関の出力上限値を超えない範囲で機関出力が可変とされる。このため、暖機の進行に伴い高まる触媒の浄化能力を上回るような機関出力が出力されることが抑制される。
【0018】
また、本発明に係る車両用制御装置は、上記(1)に記載の車両用制御装置において、(3)前記制御手段は、前記物理量と前記目標値との差分が小さくなるほど増大する内燃機関の出力上限値を設定し、前記暖機断続走行モードの実行中、前記出力上限値を超えない範囲で前記機関出力を可変する構成を有する。
【0019】
この構成により、本発明に係る車両用制御装置は、暖機断続走行モード中は、物理量と目標値との差分が小さくなるほど増大する内燃機関の出力上限値を超えない範囲で機関出力が可変とされる。このため、暖機の進行に伴い高まる触媒の浄化能力を上回るような機関出力が出力されることが抑制される。
【0020】
また、本発明に係る車両用制御装置は、上記(2)または(3)に記載の車両用制御装置において、(4)前記出力上限値は、前記触媒の浄化能力を維持可能な値に設定される。
【0021】
この構成により、本発明に係る車両用制御装置は、触媒の浄化能力を上回るような機関出力を出力することを防止することができる。
【0022】
また、本発明に係る車両用制御装置は、上記(1)ないし(4)に記載の車両用制御装置において、(5)前記制御手段は、前記暖機断続走行モードにおける惰性走行時、前記内燃機関を自立運転させる構成を有する。
【0023】
この構成により、本発明に係る車両用制御装置は、制御手段が暖機断続走行モードにおける惰性走行時、内燃機関を自立運転させるので、触媒の暖機を促進することができる。
【0024】
また、本発明に係る車両用制御装置は、上記(1)ないし(5)に記載の車両用制御装置において、(6)前記制御手段は、前記内燃機関の冷却水温、前記触媒の温度、前記内燃機関の油温のいずれか1つを、前記物理量として用いる構成を有する。
【発明の効果】
【0025】
本発明によれば、燃費向上と排気エミッションの向上との両立を図ることができる車両用制御装置を提供することができる。
【図面の簡単な説明】
【0026】
【図1】本発明の第1の実施の形態に係る車両用制御装置が適用されるハイブリッド車両の概略構成図である。
【図2】本発明の第1の実施の形態に係るエンジンの概略構成図である。
【図3】本発明の第1の実施の形態に係るHVECUで実行される断続走行制御のフローチャートである。
【図4】図3の断続走行制御に続くフローチャートである。
【図5】本発明の第1の実施の形態における断続走行制御のタイムチャートであって、(a)は、暖機断続走行モードのタイムチャートであり、(b)は、通常断続走行モードのタイムチャートである。
【図6】本発明の第2の実施の形態に係るHVECUで実行される断続走行制御のフローチャートである。
【図7】図6の断続走行制御に続くフローチャートである。
【図8】本発明の第2の実施の形態における暖機断続走行モードのタイムチャートである。
【発明を実施するための形態】
【0027】
以下、本発明の実施の形態について、図面を参照して説明する。
【0028】
(第1の実施の形態)
本発明の第1の実施の形態では、車両用制御装置を駆動力源として内燃機関と電動機とを搭載した車両、いわゆるハイブリッド車両に適用した例について説明する。
【0029】
図1に示すように、ハイブリッド車両1は、ハイブリッド車両1の駆動力を発生する駆動力源として、エンジン2と、発電可能な電動機であるモータジェネレータ(以下、単にモータという)MG1、MG2とを備える。また、ハイブリッド車両1は、駆動装置3と、車両用制御装置4とを備えている。
【0030】
駆動装置3は、モータMG1、MG2、動力分割統合機構40、減速機構70および差動機構80を備え、いわゆるハイブリッド・トランスアクスルを構成している。また、駆動装置3は、エンジン2と結合されて動力出力装置(パワープラント)を構成している。
【0031】
エンジン2は、例えばガソリンまたは軽油などの炭化水素系の燃料により動力を出力可能な内燃機関として構成されている。
【0032】
図2に示すように、エンジン2は、エアクリーナ20により清浄された空気をスロットルバルブ21および吸気通路22を介して吸入する。その後、エンジン2は、燃料噴射弁23からガソリンを噴射して吸入された空気とガソリンとを混合し、この混合気を吸気バルブ24を介して燃料室に吸入する。次いで、エンジン2は、吸入した混合気を点火プラグ25による電気火花によって爆発燃焼させて、そのエネルギにより押し下げられるピストン26の往復運動を機関出力軸12の回転運動に変換する。
【0033】
エンジン2の排気通路28上には、一酸化炭素(CO)や炭化水素(HC)、窒素酸化物(NOx)の有害成分を浄化する排ガス浄化触媒(以下、三元触媒という)29aを含む浄化装置29が設けられている。したがって、エンジン2からの排気は、浄化装置29を介して外気へ排出される。本実施の形態における三元触媒29aは、本発明に係る触媒を構成する。
【0034】
三元触媒29aは、同触媒に導入される排気ガスの空燃比(A/F)が略理論空燃比のとき、排気ガス中の未燃成分(HC、CO)を酸化し、同時にNOxを還元する機能により排気ガスを浄化する。エンジン2においては、三元触媒29aを最も有効に機能させるため、後述するA/Fセンサ207およびO2センサ208の各出力値に基づいて、空燃比(実空燃比)が理論空燃比に一致するように空燃比フィードバック制御がエンジンECU200により実行される。
【0035】
また、三元触媒29aが上述したような有害成分を浄化する浄化能力を発揮するには、十分に温められている必要がある。したがって、長時間停止後のエンジン2の始動時には、三元触媒29aの温度(触媒床温)が低いため、温度を上昇させる、すなわち三元触媒29aを活性化させる暖機が必要である。このような三元触媒29aの暖機は、後述する触媒暖機制御を実行することにより行われる。
【0036】
また、エンジン2は、吸気バルブ24の開閉タイミングVTを連続的に変更可能な可変バルブタイミング機構90を備える。可変バルブタイミング機構90は、図示しないベーン式のVVTコントローラと、オイルコントロールバルブとを備え、吸気バルブ24の開閉タイミングVTにおけるインテークカムシャフト(図示せず)の角度を連続的に変更する。
【0037】
また、図1に示すように、機関出力軸12には、動力分割統合機構40が結合されている。エンジン2は、機関出力軸12から駆動輪6に向けて機械的動力(以下、エンジン出力という)を出力する。この機械的動力は、エンジンECU200により制御可能となっている。
【0038】
モータMG1、MG2は、供給された電力を機械的動力に変換する電動機としての機能と、入力された機械的動力を電力に変換する発電機としての機能とを兼ね備えた、いわゆるモータジェネレータである。モータMG1は、主に発電機として用いられ、モータMG2は、主に電動機として用いられる。本実施の形態におけるモータMG2は、本発明に係る電動機を構成する。
【0039】
モータMG1、MG2は、永久磁石式交流同期モータ等で構成されている。モータMG1、MG2は、ステータ53、54と、ロータ51、52とを有している。ステータ53、54は、後述するインバータ61、62から交流電力の供給を受けて回転磁界を形成するようになっている。ロータ51、52は、動力分割統合機構40に結合され、回転磁界に引き付けられて回転するようになっている。モータMG1、MG2には、それぞれロータ51、52の回転角位置を検出するレゾルバ(図示せず)が設けられている。レゾルバは、検出したロータ51、52の回転角位置に応じた信号をモータECU60に送信するようになっている。
【0040】
モータMG1、MG2は、二次電池(蓄電池)105からの電力の供給を受けて電動機として動作することができる(以下、この動作状態を力行という)。一方、図示しないモータ軸が外力により回転している場合には、起電力を生じさせて二次電池105を充電する発電機として動作することができる(以下、この動作状態を回生という)。
【0041】
また、駆動装置3には、インバータ61、62およびモータECU60が設けられている。インバータ61、62は、それぞれステータ53、54に接続されている。インバータ61、62は、二次電池105から供給される直流電力を交流電力に変換して、それぞれ対応するモータMG1、MG2に供給可能に構成されている。また、インバータ61、62は、モータMG1、MG2からの交流電力を直流電力に変換して二次電池105に回収可能に構成されている。インバータ61、62の電力供給および電力回収は、モータECU60により制御される。
【0042】
動力分割統合機構40は、エンジン2およびモータMG1、MG2が出力した機械的動力を駆動軸7に伝達する動力伝達機構である。動力分割統合機構40は、シングルピニオン式の動力分割遊星歯車40aおよび減速遊星歯車40cを備えている。
【0043】
動力分割遊星歯車40aは、エンジン2が出力した機械的動力を、モータMG1を駆動する機械的動力と減速機構70を駆動する機械的動力に分割可能に構成されている。動力分割遊星歯車40aは、サンギヤ42と、プラネタリピニオン43と、プラネタリキャリア44と、リングギヤ45aとを備えている。
【0044】
サンギヤ42は、モータMG1のロータ51に結合されている。プラネタリピニオン43は、プラネタリキャリア44に対して公転および自転可能に支持されている。プラネタリキャリア44は、機関出力軸12に結合されている。このように構成された動力分割遊星歯車40aは、エンジン2のエンジン出力を、プラネタリピニオン43を介してサンギヤ42に伝達する機械的動力と、リングギヤ45aに伝達する機械的動力に分割するようになっている。エンジン2からサンギヤ42に伝達された機械的動力は、モータMG1のロータ51に伝達され、発電に供される。
【0045】
減速遊星歯車40cは、モータMG2が出力した機械的動力を、回転速度を減速しトルクを増大させて減速機構70に伝達可能に構成されている。減速遊星歯車40cは、サンギヤ46と、プラネタリキャリア47と、プラネタリピニオン48と、リングギヤ45cとを備えている。
【0046】
サンギヤ46は、モータMG2のロータ52に結合されている。プラネタリキャリア47は、駆動装置3のハウジングに固定されている。プラネタリピニオン48は、プラネタリキャリア47に対して自転可能に支持されている。このように構成された減速遊星歯車40cは、モータMG2が出力した機械的動力を、プラネタリピニオン48を介して回転速度を減速しトルクを増大させてリングギヤ45cに伝達するようになっている。
【0047】
これら動力分割遊星歯車40aと減速遊星歯車40cとは、同心上に配置されており、リングギヤ45aとリングギヤ45cとが一体に結合されている。リングギヤ45a、45cの外周側には、減速機構70のカウンタドリブンギヤ74と噛み合うカウンタドライブギヤ49が設けられている。動力分割統合機構40は、モータMG2からリングギヤ45cに伝達された機械的動力と、エンジン2からリングギヤ45aに伝達された機械的動力を統合してカウンタドライブギヤ49から減速機構70に伝達する。
【0048】
減速機構70は、カウンタドリブンギヤ74とファイナルドライブギヤ78とからなる。カウンタドリブンギヤ74は、カウンタドライブギヤ49と噛み合い、ファイナルドライブギヤ78は、差動機構80のリングギヤ82と噛み合う。また、これらカウンタドリブンギヤ74とファイナルドライブギヤ78とは、同心上に配置され、一体的に結合されている。減速機構70は、動力分割統合機構40からカウンタドリブンギヤ74に伝達された機械的動力を、回転速度を減速しトルクを増大させて、ファイナルドライブギヤ78から差動機構80に伝達する。
【0049】
差動機構80は、ファイナルドライブギヤ78に噛み合うリングギヤ82を備えている。差動機構80は、減速機構70からリングギヤ82に伝達された機械的動力を左右の駆動輪6に分配して出力する。
【0050】
図1および図2に示すように、車両用制御装置4は、ハイブリッド用電子制御装置(以下、単にHVECUという)100と、エンジンECU200と、モータECU60と、アクセルペダルポジションセンサ101、車速センサ102および水温センサ202を含む各種センサ類と、エコスイッチ104とを含んで構成されている。
【0051】
HVECU100は、例えばCPU、RAM、ROM、入出力インターフェース等を備えるマイクロコンピュータを含んで構成されており、CPUは、RAMの一時記憶機能を利用するとともにROMに予め記憶されたプログラムに従って信号処理を行うようになっている。ROMには、各種制御定数や各種マップ等が予め記憶されている。
【0052】
HVECU100は、エンジン2およびモータMG1、MG2を協調して制御する。また、HVECU100は、アクセルペダルポジションセンサ101および車速センサ102の検出結果に応じて、エンジンECU200およびモータECU60と協働して後述する断続走行制御を実行可能に構成されている。本実施の形態におけるHVECU100は、本発明に係る制御手段を構成する。
【0053】
また、HVECU100は、車両走行中において、エンジン2を始動し、または作動を停止して、エンジン2の作動状態と非作動状態とを切替可能である。非作動状態とは、エンジン出力がゼロであり、かつ機関回転速度がゼロである、すなわち機関出力軸12が静止しており、エンジン2においてエンジンブレーキトルクも生じない状態を意味している。一方、作動状態とは、エンジン2が機関出力軸12から機械的動力(エンジン出力)を出力している状態を意味している。
【0054】
例えば、一定の車速での走行中においてエンジン2を非作動状態にする場合、HVECU100は、モータMG2のモータ回転速度はそのままに、モータ出力を増大させるとともに、その分、エンジン2のエンジン出力をゼロにして、モータMG1のロータ51をリングギヤ45a、45cとは逆の回転方向に空転させて、機関回転速度をゼロにする。このようにして、エンジン2の作動を停止して、非作動状態にすることが可能となっている。
【0055】
また、一定の車速での車両走行中においてエンジン2を作動状態にする場合、HVECU100は、モータMG2のモータ回転速度はそのままに、モータ出力を減少させるとともに、モータMG1のロータ51をリングギヤ45a、45cと同一の回転方向に力行させて、機関回転速度を上昇させて、エンジン2のクランキングを行う。これにより、エンジン2を始動して、作動状態にすることが可能となっている。
【0056】
エンジンECU200は、例えばCPU、RAM、ROM、入出力インターフェース等を備えるマイクロコンピュータを含んで構成されており、CPUは、RAMの一時記憶機能を利用するとともにROMに予め記憶されたプログラムに従って信号処理を行うようになっている。ROMには、各種制御定数や各種マップ等が予め記憶されている。
【0057】
エンジンECU200には、クランクポジションセンサ201、水温センサ202、カムポジションセンサ203、スロットルバルブポジションセンサ204、エアフローメータ205、温度センサ206、A/Fセンサ207、O2センサ208が接続されている。
【0058】
クランクポジションセンサ201は、機関出力軸12の回転位置すなわちクランク角θcrやエンジン回転数Neを検出する。水温センサ202は、エンジン2の冷却水の温度すなわち冷却水温Twを検出する。カムポジションセンサ203は、インテークカムシャフトや排気バルブを開閉するエキゾーストカムシャフトの回転位置すなわちカム角θcaを検出する。スロットルバルブポジションセンサ204は、スロットルバルブ21のスロットル開度THを検出する。エアフローメータ205は、吸気管に取り付けられ、吸入空気の質量流量すなわち吸入空気量Qaを検出する。温度センサ206は、吸気管に取り付けられ、吸気温Taを検出する。A/Fセンサ207は、空燃比に対してリニアな特性を有し、比較的広範囲にわたる空燃比を連続的に検出する。O2センサ208は、理論空燃比を境に出力値が急変する特性(Z特性)を有し、排気ガス中の酸素濃度を起電力におきかえ、空燃比が理論空燃比に対してリーンかリッチかを検出する。これら各センサは、検出結果に応じた信号をエンジンECU200に出力する。
【0059】
エンジンECU200は、エンジン2を駆動するための種々の制御信号、例えば燃料噴射弁23への駆動信号や、スロットル開度THを調節するスロットルモータ21aへの駆動信号、イグニッションコイル210への制御信号、可変バルブタイミング機構90への制御信号などを出力するようになっている。
【0060】
エンジンECU200は、HVECU100と通信しており、HVECU100からの制御信号によりエンジン2を運転制御するとともに、必要に応じてエンジン2の運転状態に関するデータを出力する。
【0061】
モータECU60は、HVECU100から要求トルクおよび要求回転速度に係る信号を受け、インバータ61、62を制御する。モータECU60は、インバータ61、62を制御することにより、モータMG1、MG2のそれぞれについて、ロータ51、52の回転速度(以下、モータ回転速度という)と、ロータ51、52から出力する機械的動力(以下、モータ出力という)とを調整可能である。
【0062】
アクセルペダルポジションセンサ101は、運転者によるアクセルペダル5の操作量を検出する。アクセルペダルポジションセンサ101は、HVECU100に接続され、検出されたアクセルペダル5の操作量(以下、アクセル操作量Accという)に応じた信号をHVECU100に送信するようになっている。
【0063】
車速センサ102は、ハイブリッド車両1の車速Vを検出する。車速センサ102は、HVECU100に接続され、検出された車速Vに応じた信号をHVECU100に送信するようになっている。
【0064】
エコスイッチ104は、運転者がエンジン2による燃料消費の抑制を優先した車両走行(以下、燃費走行という)を選択するために、HVECU100に燃費走行を指示するスイッチである。エコスイッチ104は、車室内のインスツルメントパネル等、運転者により操作可能な場所に設けられている。エコスイッチ104は、運転者の操作により、ON状態とOFF状態とを切替可能に構成されている。また、エコスイッチ104のON状態とOFF状態は、HVECU100により検出される。
【0065】
また、ハイブリッド車両1には、二次電池105と、昇圧コンバータ106と、電池ECU107とが設けられている。二次電池105は、昇圧コンバータ106を介してインバータ61、62に電気的に接続されている。
【0066】
二次電池105は、モータMG1、MG2に供給する電力を貯蔵し、モータMG1、MG2との間で充放電可能に構成されている。昇圧コンバータ106は、二次電池105の電圧を昇圧してインバータ61、62の供給電圧に変換する。電池ECU107は、二次電池105の温度や電圧、充放電電流値等を監視している。
【0067】
また、電池ECU107は、二次電池105の温度や電圧、充放電電流値等の情報から二次電池105の蓄電状態(SOC:state‐of‐charge)および充放電電力を算出している。電池ECU107は、HVECU100に接続され、例えば二次電池105の蓄電状態および充放電電力に応じた信号をHVECU100に送信する等、HVECU100との間で信号のやりとりを行う。
【0068】
このように構成されたハイブリッド車両1では、アクセル操作量Accと車速Vとに基づいてユーザ要求パワーPが算出され、このユーザ要求パワーPに対応する要求動力がカウンタドライブギヤ49に出力されるよう、エンジン2とモータMG1、MG2とが運転制御される。また、ハイブリッド車両1の走行モードとしては、例えばハイブリッド走行モードやモータ走行モードあるいは回生走行モード等がある。
【0069】
ハイブリッド走行モードでは、エンジン2のエンジン出力を利用してモータMG1に発電させつつ、エンジン2およびモータMG2の両者を駆動力源としてハイブリッド車両1を走行させる。モータ走行モードでは、エンジン2を停止させた状態でモータMG2を駆動力源としてハイブリッド車両1を走行させる。回生走行モードは、減速要求等の所定条件が成立した場合に減速機構70を介して入力されるエネルギを利用してモータMG2にて発電を行う走行モードである。
【0070】
また、本実施の形態に係るハイブリッド車両1は、走行中に所定条件が成立すると、HVECU100によって断続走行制御が実行される。この断続走行制御は、車速Vがゼロより大きい(V>0)車速域で実行可能である。つまりハイブリッド車両1が走行している間は、所定条件が成立したことを条件として全ての車速域において断続走行制御が実行可能とされる。断続走行制御が実行されると、ハイブリッド車両1は、エンジン2またはモータMG2、あるいは双方が発生する駆動力を得て走行する加速走行と、エンジン2およびモータMG2から駆動力を出力させずに惰性で走行する惰性走行とを、車速Vに応じて決定される車速範囲Rで繰り返し行って走行する断続走行が可能となる。
【0071】
具体的には、HVECU100は、ハイブリッド車両1の走行中に所定条件が成立すると、制御車速VSと、車速範囲Rの上限値である上限車速VHと、車速範囲Rの下限値である下限車速VLを設定するようになっている。ここで、エコスイッチ104がONとされ、かつユーザ要求パワーPが略一定であることが、上記所定条件となっている。ユーザ要求パワーPは、アクセル操作量Accをパラメータとして車速Vとユーザ要求パワーPとの関係を予め実験的に求めて記憶されたマップを参照することによりHVECU100によって算出される。ユーザ要求パワーPが略一定である一例としては、例えば一定の車速Vで走行中に運転者によるアクセル操作量Accが一定である場合等が挙げられる。アクセル操作量Accが一定のうちには、アクセル操作量Accがゼロの場合も含まれる。ここで、ユーザ要求パワーPが略一定であるとは、多少の変動はあるものの、ある所定時間内においてユーザ要求パワーが予め定められた所定範囲内(例えば、±3km/h)に維持される状態を意味する。
【0072】
また、HVECU100は、エコスイッチON後の走行中にユーザ要求パワーPが略一定となった時点の車速Vを制御車速VSとして設定し、この制御車速VSを基準に予め定められた車速だけ高車速側および低車速側にそれぞれ上限車速VH、下限車速VLを設定するようになっている。車速範囲Rは、設定された上限車速VHおよび下限車速VLにより定まるようになっている。より具体的には、車速範囲Rは、上限車速VHおよび下限車速VLを制御車速VSからどれだけ高車速側および低車速側に設定するかにより拡大されるか、縮小されるかが定まる。ここで、車速範囲Rは、例えば車速Vが大きくなるほど拡大されるようにしてもよい。このように、車速範囲Rは、車速Vに応じて決定されるようになっている。
【0073】
また、HVECU100は、上限車速VHと制御車速VSとの車速幅、および制御車速VSと下限車速VLとの車速幅が同一となるよう、上限車速VHおよび下限車速VLを設定している。すなわち、制御車速VSは、上限車速VHと下限車速VLとの中間に設定されるようになっている。
【0074】
また、HVECU100は、例えば冷却水温Twが予め定められた暖機実行温度以下である場合にエンジン2を始動し、エンジン2を予め定められた回転数(例えば、1500rpm〜1800rpm程度)で自立運転させる触媒暖機制御を実行するようになっている。これにより、排気ガスの温度を上昇させて三元触媒29aの活性化を促進させることが可能となる。なお、冷却水温Twと暖機実行温度とを比較する代わりに、吸入空気量Qaや冷却水温Tw、空燃比AF、点火時期の遅角量等に基づいてエンジンECU200等により推定される三元触媒29aの温度(触媒床温)と所定の基準温度とを比較して触媒暖機制御を実行すべきか否かを判定してもよい。三元触媒29aの温度(触媒床温)は、例えば三元触媒29aの近傍に触媒温度センサを設けて、この触媒温度センサにより直接検知してもよい。また、触媒暖機制御においては、点火時期を通常時より遅角させたり、燃料噴射量を通常時よりも増量させる制御等を行って早期に暖機を完了するようにしてもよい。
【0075】
また、HVECU100は、触媒暖機制御実行中に、三元触媒29aの暖機の進行状態と相関する物理量である冷却水温Twが予め定められた目標値としての目標暖機温度Toに達したことを条件に、三元触媒29aの暖機が完了したものと判断するようになっている。ここで、上記物理量としては、冷却水温Twの他、例えば三元触媒29aの温度(触媒床温)やエンジン2の油温等を用いることもできる。この場合、三元触媒29aの温度(触媒床温)は、上述した通り、エンジンECU200等による推定あるいは触媒温度センサを設けることで検知可能であり、エンジン2の油温は、油温センサを設けることで検知可能である。
【0076】
さらに、HVECU100は、触媒暖機制御実行中に断続走行制御が実行された場合には、三元触媒29aの暖機の進行状態に応じて、暖機断続走行モードと通常断続走行モードとを切り替えるようになっている。具体的には、HVECU100は、冷却水温Twが目標暖機温度Toに達したことを条件に三元触媒29aの暖機が完了したものと判断し、暖機断続走行モードから通常断続走行モードに切り替える。
【0077】
ここで、暖機断続走行モードは、エンジン2を予め定められた回転数で自立運転させて三元触媒29aの暖機を行うとともに、モータMG2が発生する駆動力を用いて断続走行を実行するモードである。通常断続走行モードは、エンジン2およびモータMG2が発生する駆動力を用いて断続走行を実行するモードである。
【0078】
次に、図3〜図5(a)、(b)を参照して、本実施の形態に係る触媒暖機制御実行中の断続走行制御について説明する。
【0079】
図3および図4に示す断続走行制御の処理フローは、ハイブリッド車両1の走行中に所定の時間間隔で実行されるものである。特に、本処理フローは、触媒暖機制御実行中に実行される。
【0080】
図3に示すように、まずHVECU100は、車速Vがゼロより大きい(V>0)か否かを判定する(ステップS1)。V>0でないと判定された場合、HVECU100は、断続走行制御を実行することなく本処理を終了する。
【0081】
HVECU100は、V>0であると判定された場合、エコスイッチ104がON状態か否かを判定する(ステップS2)。HVECU100は、エコスイッチ104がON状態でない、つまりエコスイッチ104がOFF状態であると判定された場合には、運転者により燃費走行が選択されていないと判断して断続走行制御を実行することなく本処理を終了する。
【0082】
HVECU100は、エコスイッチ104がON状態であると判定された場合には、ユーザ要求パワーPが略一定か否かを判定する(ステップS3)。HVECU100は、ユーザ要求パワーPが略一定でない場合には、前回周期で断続走行が実行されているのであれば、その断続走行を中断し(ステップS17)、ステップS18に移行する。ステップS18において、HVECU100は、ハイブリッド車両1が加速中か否かを判定する。加速中か否かは、例えば車速センサ102で検出された車速Vの変化量に基づき判定される。
【0083】
HVECU100は、ハイブリッド車両1が加速中であると判定された場合には、ユーザ要求パワーPに基づき所望の駆動力が発生するよう、エンジン2およびモータMG2を協調して駆動する(ステップS19)。なお、モータ走行モード中や三元触媒29aの暖機が完了していない場合には、モータMG2のみを駆動してユーザ要求パワーPに基づく所望の駆動力を発生させる。
【0084】
一方、HVECU100は、ハイブリッド車両1が加速中でないと判定された場合には、ハイブリッド車両1が減速状態であると判断してエンジン2を停止するとともに、モータMG2の駆動を停止、あるいは駆動輪6から伝わる動力によりモータMG2を回転させて発電機として動作(回生動作)させる(ステップS20)。
【0085】
HVECU100は、ステップS3において、ユーザ要求パワーPが略一定であると判定された場合には、冷却水温Twが目標暖機温度To以上か否かを判定する(ステップS4)。HVECU100は、冷却水温Twが目標暖機温度To以上でないと判定した場合には、暖機断続走行モードが実行される(ステップS5)。
【0086】
具体的には、図5(a)に示すように、HVECU100は、エンジン2を自立運転させるとともに、上限車速VHと下限車速VLとで定まる車速範囲Rで加速走行と惰性走行を繰り返し実行するようモータMG2の駆動を制御する。この暖機断続走行モードでは、加速走行時、モータMG2のモータ出力Pmをモータ出力Pm1とする。一方、惰性走行時は、モータMG2のモータ出力Pmがゼロとされる。
【0087】
また、エンジン2のエンジン出力Peは、自立運転に基づき、駆動輪6に向けて機械的動力を出力しないエンジン出力Pe_idleとされる。これにより、三元触媒29aの暖機が完了するまでの間、モータMG2の駆動によって上限車速VHと下限車速VLとの間で加速走行と惰性走行が繰り返される。本実施の形態におけるエンジン出力Peは、本発明における機関出力に相当する。
【0088】
ここで、本実施の形態では、暖機断続走行モード中のエンジン出力Peをエンジン出力Pe_idleとしたが、三元触媒29aの浄化能力を上回ることのないような比較的低負荷なエンジン出力としてもよい。
【0089】
HVECU100は、ステップS4において、冷却水温Twが目標暖機温度To以上であると判定した場合には、図4に示すステップS11の通常断続走行モードに移行する。通常断続走行モードについては、後述する。
【0090】
次いで、HVECU100は、ステップS6において、車速Vが上限車速VHまで上昇したか否かを判定する。HVECU100は、車速Vが上限車速VHまで上昇したと判定した場合には、エンジン2の自立運転を継続するとともに、モータMG2の駆動を停止(ステップS7)して本処理を終了する。すなわち、HVECU100は、車速Vが上限車速VHに達したことを条件としてハイブリッド車両1を加速走行から惰性走行に移行させる。
【0091】
一方、HVECU100は、ステップS6において、車速Vが上限車速VHまで上昇していないと判定した場合には、車速Vが下限車速VLまで低下したか否かを判定する(ステップS8)。HVECU100は、車速Vが下限車速VLまで低下したと判定した場合には、エンジン2の自立運転を継続するとともに、モータMG2をモータ出力Pm1で駆動(ステップS9)して本処理を終了する。すなわち、HVECU100は、車速Vが下限車速VLに達したことを条件としてハイブリッド車両1を惰性走行から加速走行に移行させる。
【0092】
他方、HVECU100は、ステップS8において、車速Vが下限車速VLまで低下していないと判定した場合には、エンジン2の自立運転を継続するとともに、モータMG2の駆動状態(モータ状態)を保持して(ステップS10)本処理を終了する。すなわち、ハイブリッド車両1が加速走行中であれば、モータ出力Pm1でのモータMG2の駆動を維持し、これとは逆にハイブリッド車両1が惰性走行中であればモータMG2の駆動停止を維持する。ただし、加速走行中および惰性走行中のいずれであっても、エンジン2は自立運転が継続される。
【0093】
次に、図4を参照して、通常断続走行モードについて説明する。
【0094】
図4に示すように、HVECU100は、冷却水温Twが目標暖機温度To以上であると判定した場合(図3のステップS4でYES)には、通常断続走行モードが実行される(ステップS11)。つまり、HVECU100は、冷却水温Twが目標暖機温度Toに達したことを条件に暖機断続走行モードから通常断続走行モードに切り替える。
【0095】
具体的には、図5(b)に示すように、HVECU100は、上限車速VHと下限車速VLとで定まる車速範囲Rで加速走行と惰性走行を繰り返し実行するようエンジン2とモータMG2を協調して制御する。この通常断続走行モードでは、加速走行時、モータMG2のモータ出力Pmをモータ出力Pm1より小さいモータ出力Pm2とし、かつエンジン2のエンジン出力Peをエンジン出力Pe_idleよりも大きいエンジン出力Pe2とする。これらモータ出力Pm2およびエンジン出力Pe2は、ユーザ要求パワーPに応じて所定の配分比で分配される。
【0096】
次いで、HVECU100は、ステップS12において、車速Vが上限車速VHまで上昇したか否かを判定する。HVECU100は、車速Vが上限車速VHまで上昇したと判定した場合には、エンジン2およびモータMG2の駆動を停止して(ステップS13)本処理を終了する。すなわち、HVECU100は、車速Vが上限車速VHに達したことを条件としてハイブリッド車両1を加速走行から惰性走行に移行させる。
【0097】
一方、HVECU100は、ステップS12において、車速Vが上限車速VHまで上昇していないと判定した場合には、車速Vが下限車速VLまで低下したか否かを判定する(ステップS14)。HVECU100は、車速Vが下限車速VLまで低下したと判定した場合には、エンジン2およびモータMG2をそれぞれエンジン出力Pe2、モータ出力Pm2で駆動して(ステップS15)本処理を終了する。すなわち、HVECU100は、車速Vが下限車速VLに達したことを条件としてハイブリッド車両1を惰性走行から加速走行に移行させる。
【0098】
他方、HVECU100は、ステップS14において、車速Vが下限車速VLまで低下していないと判定した場合には、エンジン2の駆動状態(エンジン状態)、モータMG2の駆動状態(モータ状態)をそれぞれ保持して(ステップS16)本処理を終了する。すなわち、ハイブリッド車両1が加速走行中であれば、エンジン出力Pe2でのエンジン2の駆動を維持するとともに、モータ出力Pm2でのモータMG2の駆動を維持する。これとは逆にハイブリッド車両1が惰性走行中であれば、エンジン2およびモータMG2の駆動停止を維持する。
【0099】
ここで、図5(a)、(b)では、暖機断続走行モードにおける加速走行の継続時間をtm1、惰性走行の継続時間t1とし、通常断続走行モードにおける加速走行の継続時間をtm2、te2、惰性走行の継続時間をt2としている。暖機断続走行モードおよび通常断続走行モードにおける加速走行と惰性走行の継続時間を同等とするには、継続時間tm1と継続時間tm2、te2とを一致させるとともに、継続時間t1と継続時間t2とを一致させる。
【0100】
以上のように、本実施の形態に係る車両用制御装置4は、冷却水温Twが目標暖機温度Toに達したことを条件に暖機が完了したものとHVECU100によって判断され、暖機断続走行モードから通常断続走行モードに切り替えられる。したがって、三元触媒29aの暖機の完了有無に応じて、エンジン2およびモータMG2の駆動状態を好適に制御することができ、三元触媒29aの浄化能力やエンジン2の運転効率等を考慮した断続走行を実現することができる。この結果、本実施の形態に係る車両用制御装置4は、燃費向上と排気エミッションの向上との両立を図ることができる。
【0101】
また、本実施の形態に係る車両用制御装置4は、暖機断続走行モード中の惰性走行時においてもエンジン2を自立運転させるので、三元触媒29aの暖機を促進することができる。
【0102】
なお、本実施の形態では、断続走行制御においてユーザ要求パワーPが略一定となった時点の車速Vを制御車速VSとして設定し、この制御車速VSを基準に予め定められた車速だけ高車速側および低車速側にそれぞれ上限車速VH、下限車速VLを設定するようにしたが、これに限らず、例えばユーザ要求パワーPが略一定となった時点の車速Vを上限車速VHとして設定し、これを基準に下限車速VL、車速範囲Rおよび制御車速VSを設定するようにしてもよい。具体的には、HVECU100は、上限車速VHの設定と同時あるいは設定後に、上限車速VHから予め定められた車速だけ減じた値を下限車速VLを設定する。また、HVECU100は、上限車速VHおよび下限車速VLの設定と同時あるいは設定後に、上限車速VHから予め定められた車速だけ低車速側に制御車速VSを設定する。このとき、制御車速VSは、上限車速VHと下限車速VLとの中間に設定されるのが好ましい。
【0103】
(第2の実施の形態)
次に、図6〜図8を参照して、本発明の第2の実施の形態について説明する。
【0104】
特に本実施の形態は、上述の第1の実施の形態とは暖機断続走行モードの制御内容が異なるが、他の構成は同様である。したがって、第1の実施の形態と同様の構成には同一の符号を付して説明を省略する。
【0105】
本実施の形態に係るHVECU100は、暖機断続走行モードの実行中、冷却水温Twに基づき、加速走行時のエンジン2のエンジン出力Peを可変させるようになっている。
【0106】
具体的には、図8に示すように、HVECU100は、冷却水温Twに応じたエンジン2の出力上限値P_limitを設定するようになっている。この出力上限値P_limitは、三元触媒29aの暖機の進行状態と相関する物理量が大きくなるほど、すなわち冷却水温Twの上昇に伴い増大するよう設定される。また、出力上限値P_limitは、例えば予め実験的に求めて記憶された冷却水温Twと出力上限値P_limitとの関係マップ等を参照することにより決定される。
【0107】
ここで、出力上限値P_limitは、三元触媒29aの浄化能力を維持可能な値に設定される。すなわち、出力上限値P_limitは、エンジン2が当該出力上限値P_limitで運転しても十分に三元触媒29aで排気ガス中の一酸化炭素(CO)や炭化水素(HC)、窒素酸化物(NOx)を浄化可能なエンジン出力Peとして設定されるものであり、エンジン2の性能や三元触媒29aの性能等により定めることができる。
【0108】
また、この出力上限値P_limitは、暖機の進行に伴い三元触媒29aの浄化能力が高まることから、冷却水温Twの上昇とともに段階的に大きくなるように設定される。なお、出力上限値P_limitは、図8に示すように段階的に設定される場合に限らず、例えば冷却水温Twと相関して無段階に設定してもよい。
【0109】
HVECU100は、暖機断続走行モードの実行中、この出力上限値P_limitを超えない範囲でエンジン出力Peを可変するようになっている。例えば、図8に示すように、経過時間S1ないし経過時間S2の間は、暖機初期時でありエンジン2が比較的低温である。このような暖機初期時は、熱効率が低くエンジン2の運転効率が低下するため、エンジン出力Peをエンジン出力Pe_idleとしてモータ出力Pm1とする。すなわち、暖機初期時は、モータ出力Pm1によって断続走行が行われる。
【0110】
一方、経過時間S2以後は、暖機が進行しエンジン2も比較的温まってきていることから、断続走行に際し、エンジン出力Peを用いても暖機初期時のように運転効率が低下することがない。したがって、この場合には、出力上限値P_limitを超えない範囲でエンジン出力Peを用いるとともに、これを補うモータ出力Pmによって断続走行が行われる。
【0111】
本実施の形態では、暖機断続走行モードの実行中において、エンジン2の運転効率が低下するか否かの基準として、例えば後述する基準水温Ttを用いることとした。
【0112】
次に、本実施の形態に係る触媒暖機制御実行中の断続走行制御について説明する。
【0113】
図6および図7に示す断続走行制御の処理フローは、ハイブリッド車両1の走行中に所定の時間間隔で実行されるものである。特に、本処理フローは、触媒暖機制御実行中に実行される。また、図7に示すステップS21〜ステップS36は、第1の実施の形態における図3に示すステップS1〜ステップS4、ステップS11〜ステップS20と略同様である。したがって、以下においては、第1の実施の形態と異なるステップS41以降の各ステップについて説明する。ただし、ステップS35については、一部異なるので、これについては後述する。
【0114】
図6および図7に示すように、HVECU100は、冷却水温Twが目標暖機温度To以上でないと判定した場合(ステップS24でNO)には、暖機断続走行モードが実行される(ステップS41)。
【0115】
本実施の形態における暖機断続走行モードでは、加速走行時、暖機の進行状態に応じてエンジン出力Peをエンジン出力Pe_idleないしエンジン出力Pe4のように可変とし、これに応じてモータ出力Pmをモータ出力Pm1ないしモータ出力Pm4とする。一方、惰性走行時は、エンジン出力Peがエンジン出力Pe_idleとされるとともに、モータ出力Pmがゼロとされる。
【0116】
このように、本実施の形態における暖機断続走行モードでは、暖機の進行状態に応じて、モータMG2のみの駆動力によって断続走行を行うか、あるいはエンジン2およびモータMG2の駆動力によって断続走行を行うかが決定される。なお、惰性走行時のエンジン出力Peは、エンジン出力Pe_idleに限らず、三元触媒29aの浄化能力を上回ることのないような比較的低負荷なエンジン出力としてもよい。
【0117】
次いで、HVECU100は、ステップS42において、車速Vが上限車速VHまで上昇したか否かを判定する。HVECU100は、車速Vが上限車速VHまで上昇したと判定した場合には、エンジン2の自立運転を継続するとともに、モータMG2の駆動を停止して(ステップS43)本処理を終了する。すなわち、HVECU100は、車速Vが上限車速VHに達したことを条件としてハイブリッド車両1を加速走行から惰性走行に移行させる。
【0118】
一方、HVECU100は、ステップS42において、車速Vが上限車速VHまで上昇していないと判定した場合には、車速Vが下限車速VLまで低下したか否かを判定する(ステップS44)。HVECU100は、車速Vが下限車速VLまで低下したと判定した場合には、冷却水温Twが基準水温Tt以上であるか否かを判定する(ステップS45)。ここで、基準水温Ttとは、エンジン2の運転効率を考慮した水温であり、例えば基準水温Ttより低い水温状態のときには、暖機が不十分であり熱効率が低いことからエンジン出力Peによらずモータ出力Pmによって断続走行を行う。
【0119】
HVECU100は、冷却水温Twが基準水温Tt以上でないと判定した場合には、エンジン2の自立運転を継続するとともに、モータMG2をモータ出力Pm1で駆動して(ステップS46)本処理を終了する。すなわち、HVECU100は、車速Vが下限車速VLに達したことを条件としてハイブリッド車両1を惰性走行から加速走行に移行させる。
【0120】
一方、HVECU100は、冷却水温Twが基準水温Tt以上であると判定した場合には、エンジン2を出力上限値P_limit以下のエンジン出力Pe2ないしエンジン出力Pe4で駆動するとともに、ユーザ要求パワーPを出力可能にするため、エンジン出力Pe2ないしエンジン出力Pe4を補うのに必要なモータ出力Pm2ないしモータ出力Pm4でモータMG2を駆動して(ステップS47)本処理を終了する。
【0121】
他方、HVECU100は、ステップS44において、車速Vが下限車速VLまで低下していないと判定した場合には、エンジン2の駆動状態(エンジン状態)、モータMG2の駆動状態(モータ状態)をそれぞれ保持して(ステップS48)本処理を終了する。すなわち、冷却水温Twが基準水温Ttより低い状態でのハイブリッド車両1の加速走行中であれば、エンジン2の自立運転を維持するとともに、モータ出力Pm1でのモータMG2の駆動を維持する。また、冷却水温Twが基準水温Tt以上の状態でのハイブリッド車両1の加速走行中であれば、エンジン出力Pe2ないしエンジン出力Pe4でのエンジン2の駆動を維持するとともに、モータ出力Pm2ないしモータ出力Pm4でのモータMG2の駆動を維持する。これらとは逆にハイブリッド車両1が惰性走行中であれば、エンジン2の自立運転を維持するとともに、モータMG2の駆動停止を維持する。
【0122】
ところで、本実施の形態の図6に示すステップS35では、第1の実施の形態と同様、HVECU100は、ユーザ要求パワーPに基づき所望の駆動力が発生するよう、エンジン2およびモータMG2を協調して駆動する。ただし、モータ走行モード中である場合には、モータMG2のみを駆動してユーザ要求パワーPに基づく所望の駆動力を発生させる。また、三元触媒29aの暖機が完了していない場合には、暖機の進行状態に応じて、モータMG2のみを駆動するか、あるいはエンジン2およびモータMG2を協調して駆動させるかが適宜選択される。
【0123】
次に、図8に示すタイムチャートを参照して、本実施の形態における暖機断続走行モード実行中の断続走行について説明する。
【0124】
図8に示すように、経過時間S1までは、冷却水温Twが低温であるため、エンジン2はエンジン出力Pe_idleで自立運転される。次いで、経過時間S1に達すると、暖機の進行に伴い冷却水温Twが上昇するため、これに応じてエンジン2の出力上限値P_limit1が設定される。ここでは、出力上限値P_limit1がエンジン出力Pe_idleよりも大きい値とされているが、未だ冷却水温Twが基準水温Ttよりも低いため熱効率も低い。このため、出力上限値P_limit1でエンジン2を駆動させてもかえってエンジン2の運転効率が下がるおそれがあるため、経過時間S2までは燃費を考慮してモータMG2をモータ出力Pm1で駆動する。すなわち、ユーザ要求パワーPに基づく所望の駆動力をモータMG2のモータ出力Pm1により発生させている。このとき、エンジン2は、継続してエンジン出力Pe_idleで自立運転されている。
【0125】
次いで、経過時間S2に達すると、出力上限値P_limit1よりも大きな出力上限値P_limit2が設定される。このとき、冷却水温Twは、暖機の進行に伴い基準水温Tt以上となっている。したがって、経過時間S2ないし経過時間S3の間は、加速走行時におけるエンジン出力Peが出力上限値P_limit2と同等のエンジン出力Pe2とされる。このとき、モータ出力Pmは、エンジン出力Pe2で足りない駆動力を発生させるべく、モータ出力Pm1より小さなモータ出力Pm2とされる。
【0126】
その後、経過時間S3に達すると、出力上限値P_limit2よりも大きな出力上限値P_limit3が設定される。したがって、経過時間S3ないし経過時間S4の間は、加速走行時におけるエンジン出力Peが出力上限値P_limit3と同等のエンジン出力Pe3とされる。このとき、モータ出力Pmは、エンジン出力Pe3で足りない駆動力を発生させるべく、モータ出力Pm2より小さなモータ出力Pm3とされる。
【0127】
次に、経過時間S4に達すると、出力上限値P_limit3よりも大きな出力上限値P_limit4が設定される。したがって、経過時間S4ないし経過時間S5の間は、加速走行時におけるエンジン出力Peが出力上限値P_limit4まで出力可能となるが、燃費を考慮してエンジン出力Peが出力上限値P_limit4より小さいエンジン出力Pe4とされる。このとき、モータ出力Pmは、エンジン2とモータMG2との配分比に応じたモータ出力Pm4とされる。
【0128】
その後、経過時間S5に達すると、冷却水温Twが目標暖機水温Toに達し、三元触媒29aの暖機が完了する。このとき、同時に惰性走行時のエンジン出力Peがエンジン出力Pe_idleからゼロとされる。したがって、その後(経過時間S5以降)は、エンジン出力Pe4とモータ出力Pm4とで加速走行時の駆動力を発生させるとともに、惰性走行時のエンジン出力Peおよびモータ出力Pmをゼロとする通常断続走行モードに移行する。
【0129】
上述した図8に示すタイムチャートにおけるエンジン出力Pe2ないしエンジン出力Pe4は、一例であってこれに限定されるものではない。すなわち、エンジン出力Pe2ないしエンジン出力Pe4は、例えば低速走行時か高速走行時であるか等のハイブリッド車両1の走行状態やエンジン2の諸元値等によって、出力上限値P_limitを超えない範囲で適宜最適な値とされる。
【0130】
以上のように、本実施の形態に係る車両用制御装置4は、冷却水温Twが目標暖機温度Toに達したことを条件に暖機が完了したものとHVECU100によって判断され、暖機断続走行モードから通常断続走行モードに切り替えられる。また、暖機断続走行モードの実行中は、冷却水温Twに基づき、加速走行時のエンジン出力Peが可変させられる。
【0131】
このため、例えば暖機初期時(例えば、図8に示す経過時間S1ないし経過時間S2)のような低温域でハイブリッド車両1を断続走行させる場合には、熱効率が低くエンジン2の運転効率が低下するため、エンジン2のエンジン出力PeによらずモータMG2のモータ出力Pmによって断続走行を行うことができる。これにより暖機初期時の燃費が向上する。一方、暖機が進行すると、冷却水温Twが上昇し三元触媒29aの浄化能力も高まることから、この浄化能力を上回らない範囲でエンジン出力Peを出力可能となる。この場合、三元触媒29aの浄化能力を維持しつつ、エンジン2とモータMG2の出力を用いて断続走行を行うことができる。
【0132】
したがって、本実施の形態に係る車両用制御装置4は、暖機の進行状態に応じてエンジン2およびモータMG2の出力を好適に制御することができ、燃費向上と排気エミッションの向上との両立を図ることができる。
【0133】
また、本実施の形態に係る車両用制御装置4は、暖機断続走行モード中は、冷却水温Twが上昇するほど増大するエンジン2の出力上限値P_limitを超えない範囲でエンジン出力Peが可変とされる。このため、暖機の進行に伴い高まる三元触媒29aの浄化能力を上回るようなエンジン出力Peが出力されることが抑制される。
【0134】
なお、本実施の形態において、HVECU100は、冷却水温Twに応じて出力上限値P_limitを設定したが、例えば図8に示すように、冷却水温Twと目標暖機温度Toとの差分ΔTに応じて出力上限値P_limitを設定してもよい。具体的には、出力上限値P_limitは、差分ΔTが小さくなるほど増大するよう設定される。この場合であっても、上述した本実施の形態と同様の効果を得ることができる。
【0135】
以上説明したように、本発明に係る車両用制御装置は、燃費向上と排気エミッションの向上との両立を図ることができ、駆動力源として内燃機関および電動機を備えた車両に適用される車両用制御装置に有用である。
【符号の説明】
【0136】
1 ハイブリッド車両(車両)
2 エンジン(内燃機関)
4 車両用制御装置
28 排気通路
29a 三元触媒(触媒)
60 モータECU
100 HVECU(制御手段)
200 エンジンECU
MG2 モータ(電動機)
【特許請求の範囲】
【請求項1】
車両の駆動力を発生する駆動力源として内燃機関および電動機と、前記内燃機関の排気通路上に設けられた触媒とを備え、前記駆動力を得て走行する加速走行と前記駆動力源から前記駆動力を出力せずに惰性で走行する惰性走行とを、車速に応じて決定される車速範囲で繰り返し行って走行する断続走行が可能な車両に用いられる車両用制御装置であって、
前記内燃機関を予め定められた回転数で自立運転させて前記触媒の暖機を行うとともに前記電動機が発生する駆動力または前記電動機および前記内燃機関が発生する駆動力を用いて前記断続走行を実行する暖機断続走行モードと、前記内燃機関および前記電動機が発生する駆動力を用いて前記断続走行を実行する通常断続走行モードとを有し、前記暖機の進行状態と相関する物理量が予め設定された目標値に達したことを条件に前記暖機が完了したものと判断し、前記暖機断続走行モードから前記通常断続走行モードに切り替える制御手段を備え、
前記制御手段は、前記暖機断続走行モードの実行中、前記物理量に基づき、加速走行時の前記内燃機関の機関出力を可変させることを特徴とする車両用制御装置。
【請求項2】
前記制御手段は、前記物理量が大きくなるほど増大する内燃機関の出力上限値を設定し、前記暖機断続走行モードの実行中、前記出力上限値を超えない範囲で前記機関出力を可変することを特徴とする請求項1に記載の車両用制御装置。
【請求項3】
前記制御手段は、前記物理量と前記目標値との差分が小さくなるほど増大する内燃機関の出力上限値を設定し、前記暖機断続走行モードの実行中、前記出力上限値を超えない範囲で前記機関出力を可変することを特徴とする請求項1に記載の車両用制御装置。
【請求項4】
前記出力上限値は、前記触媒の浄化能力を維持可能な値に設定されることを特徴とする請求項2または請求項3に記載の車両用制御装置。
【請求項5】
前記制御手段は、前記暖機断続走行モードにおける惰性走行時、前記内燃機関を自立運転させることを特徴とする請求項1ないし請求項4のいずれか1の請求項に記載の車両用制御装置。
【請求項6】
前記制御手段は、前記内燃機関の冷却水温、前記触媒の温度、前記内燃機関の油温のいずれか1つを、前記物理量として用いることを特徴とする請求項1ないし請求項5のいずれか1の請求項に記載の車両用制御装置。
【請求項1】
車両の駆動力を発生する駆動力源として内燃機関および電動機と、前記内燃機関の排気通路上に設けられた触媒とを備え、前記駆動力を得て走行する加速走行と前記駆動力源から前記駆動力を出力せずに惰性で走行する惰性走行とを、車速に応じて決定される車速範囲で繰り返し行って走行する断続走行が可能な車両に用いられる車両用制御装置であって、
前記内燃機関を予め定められた回転数で自立運転させて前記触媒の暖機を行うとともに前記電動機が発生する駆動力または前記電動機および前記内燃機関が発生する駆動力を用いて前記断続走行を実行する暖機断続走行モードと、前記内燃機関および前記電動機が発生する駆動力を用いて前記断続走行を実行する通常断続走行モードとを有し、前記暖機の進行状態と相関する物理量が予め設定された目標値に達したことを条件に前記暖機が完了したものと判断し、前記暖機断続走行モードから前記通常断続走行モードに切り替える制御手段を備え、
前記制御手段は、前記暖機断続走行モードの実行中、前記物理量に基づき、加速走行時の前記内燃機関の機関出力を可変させることを特徴とする車両用制御装置。
【請求項2】
前記制御手段は、前記物理量が大きくなるほど増大する内燃機関の出力上限値を設定し、前記暖機断続走行モードの実行中、前記出力上限値を超えない範囲で前記機関出力を可変することを特徴とする請求項1に記載の車両用制御装置。
【請求項3】
前記制御手段は、前記物理量と前記目標値との差分が小さくなるほど増大する内燃機関の出力上限値を設定し、前記暖機断続走行モードの実行中、前記出力上限値を超えない範囲で前記機関出力を可変することを特徴とする請求項1に記載の車両用制御装置。
【請求項4】
前記出力上限値は、前記触媒の浄化能力を維持可能な値に設定されることを特徴とする請求項2または請求項3に記載の車両用制御装置。
【請求項5】
前記制御手段は、前記暖機断続走行モードにおける惰性走行時、前記内燃機関を自立運転させることを特徴とする請求項1ないし請求項4のいずれか1の請求項に記載の車両用制御装置。
【請求項6】
前記制御手段は、前記内燃機関の冷却水温、前記触媒の温度、前記内燃機関の油温のいずれか1つを、前記物理量として用いることを特徴とする請求項1ないし請求項5のいずれか1の請求項に記載の車両用制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−112126(P2013−112126A)
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願番号】特願2011−259300(P2011−259300)
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年6月10日(2013.6.10)
【国際特許分類】
【出願日】平成23年11月28日(2011.11.28)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]