
車両用制御装置
【課題】どのような車両操作により所定の走行制御が実行され易くなるかということを把握できる情報を提示することができる車両用制御装置を提供する。
【解決手段】表示部76は、走行データが蓄積された履歴情報DThisから現在の車両状態に基づいて、惰性走行制御(所定の走行制御)が実行されると予測されるということを、車両6の現在位置を基準とした所定範囲内の走行路に関連付けて表示装置64に表示する。従って、運転者が現在の車両状態を変化させれば、惰性走行制御が実行されると予測される走行路が変化して表示されるので、電子制御装置60は、どのような車両操作により惰性走行制御が実行され易くなるかということを把握できる情報を、運転者に対して提示することができる。そうなれば、例えば運転者は上記惰性走行制御による燃費向上というメリットを意識的に引き出すように、車両6を走行させることが可能である。
【解決手段】表示部76は、走行データが蓄積された履歴情報DThisから現在の車両状態に基づいて、惰性走行制御(所定の走行制御)が実行されると予測されるということを、車両6の現在位置を基準とした所定範囲内の走行路に関連付けて表示装置64に表示する。従って、運転者が現在の車両状態を変化させれば、惰性走行制御が実行されると予測される走行路が変化して表示されるので、電子制御装置60は、どのような車両操作により惰性走行制御が実行され易くなるかということを把握できる情報を、運転者に対して提示することができる。そうなれば、例えば運転者は上記惰性走行制御による燃費向上というメリットを意識的に引き出すように、車両6を走行させることが可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行で得られた履歴情報を活用して運転者の運転を支援する技術に関する。
【背景技術】
【0002】
車両走行で得られた走行データを履歴情報として蓄積する車両用制御装置が、従来から知られている。例えば、特許文献1に記載された車両用情報提示装置がそれである。その車両用情報提示装置は、具体的には、運転支援の制御不能を示す制御状態情報と制御不能地点とを互いに対応させた制御履歴情報を蓄積する。そして、上記制御履歴情報として登録されている制御不能地点が自車両周辺に存在する場合には、その制御不能地点を提示する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−126888号公報
【特許文献2】特開2009−029343号公報
【特許文献3】特開2005−067483号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記特許文献1の車両用情報提示装置は、前記制御不能地点を提示することで、車両が上記制御不能地点に到達する前に事前にその制御不能地点を運転者に認識させることができる。しかし、車両において所定の走行制御が行われる場合に、上記特許文献1と同様に、その所定の走行制御の制御不能地点が提示されるだけでは、運転者はどのような車両操作をすればその所定の走行制御が実行され易くなるかということを把握することが困難であった。例えば、運転者が上記所定の走行制御の実行頻度を高め、その所定の走行制御のメリットを多く享受しよう考えたとしても、運転者は上記所定の走行制御の実行頻度を意識的に高めることが困難であった。なお、このような課題は未公知のことである。
【0005】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、どのような車両操作により所定の走行制御が実行され易くなるかということを把握できる情報を提示することができる車両用制御装置を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するための第1発明の要旨とするところは、(a)所定の走行制御が実行される車両において、その車両が走行路を走行したことで得られた走行データを履歴情報として蓄積する車両用制御装置であって、(b)前記履歴情報から現在の車両状態に基づいて、前記所定の走行制御が実行されると予測されるということを、前記車両の現在位置を基準とした所定範囲内の走行路に関連付けて表示装置に表示することを特徴とする。
【発明の効果】
【0007】
このようにすれば、運転者が現在の車両状態を変化させれば、上記所定の走行制御が実行されると予測される走行路が異なり、それが上記表示装置に表示されるので、どのような車両操作により上記所定の走行制御が実行され易くなるかということを把握することができる情報を、例えば運転者に対して提示することができる。そうなれば、例えば運転者は上記所定の走行制御によるメリットを意識的に引き出すように、車両を走行させることが可能である。
【0008】
また、第2発明の要旨とするところは、前記第1発明の車両用制御装置であって、前記履歴情報から前記現在の車両状態に基づいて、その現在の車両状態に所定の変更を加えれば前記所定の走行制御が実行されると予測されるということを、前記所定範囲内の走行路に関連付けて前記表示装置に表示することを特徴とする。このようにすれば、前記所定の走行制御が実行される区間がどのような車両操作により増やすことができるのかということが示唆されるので、前記所定の走行制御の実行の可否と車両操作との相関関係が理解され易くなる。
【0009】
また、第3発明の要旨とするところは、前記第1発明または前記第2発明の車両用制御装置であって、(a)前記履歴情報には前記所定の走行制御に関連する情報が含まれており、(b)その履歴情報に基づいて得た前記所定の走行制御の実行頻度の高さを、前記所定範囲内の走行路に関連付けて前記表示装置に表示することを特徴とする。このようにすれば、運転者の車両操作により上記所定の走行制御が実行され或いは実行されなかったかを確認することができ、運転者が車両操作により上記所定の走行制御の実行に関与したという実感を高めることが可能である。
【0010】
また、第4発明の要旨とするところは、前記第3発明の車両用制御装置であって、前記履歴情報に基づいて得た前記所定の走行制御の実行による効果の程度を、前記所定範囲内の走行路に関連付けて前記表示装置に表示することを特徴とする。このようにすれば、上記所定の走行制御が実行されたことによる効果を運転者が確認することができる。
【0011】
また、第5発明の要旨とするところは、前記第1発明から前記第4発明の何れか一の車両用制御装置であって、(a)前記履歴情報には、前記所定の走行制御が強制的に終了させられた走行路を示す情報が含まれており、(b)前記所定の走行制御が強制的に終了させられたということを、前記所定範囲内の走行路に関連付けて前記表示装置に表示することを特徴とする。このようにすれば、運転者が前記所定の走行制御が実行されるために必要な条件を認識し易くなる。
【0012】
また、第6発明の要旨とするところは、前記第1発明から前記第5発明の何れか一の車両用制御装置であって、前記履歴情報において前記所定の走行制御が実行されその実行による効果が所定の水準以下であったということを、前記所定範囲内の走行路に関連付けて前記表示装置に表示することを特徴とする。このようにすれば、運転者が前記所定の走行制御が効果的に実行されるために必要な条件を認識し易くなる。
【0013】
ここで、好適には、(a)前記車両は、エンジンと走行用電動機とを備えたハイブリッド車両であり、(b)前記所定の走行制御は、前記エンジンを停止しそのエンジンと駆動輪との間の動力伝達を遮断して惰性走行を行う惰性走行制御である。
【0014】
また、好適には、(a)前記走行路は、予め記憶されている道路地図情報を構成し道路の一区間に相当するリンクに対応しており、(b)前記車両の現在位置を基準とした前記所定範囲内のリンク毎に、前記履歴情報から前記現在の車両状態に基づいてそのリンクにおける推定車両状態を推定し、(c)その推定車両状態が前記所定の走行制御の予め定められた制御実行条件を満たす場合には、そのリンクにおいて前記所定の走行制御が実行されると予測されるものとする。
【図面の簡単な説明】
【0015】
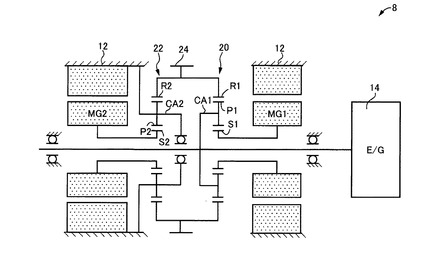
【図1】本発明が適用されるハイブリッド車両に備えられた車両用駆動装置を説明するための骨子図である。
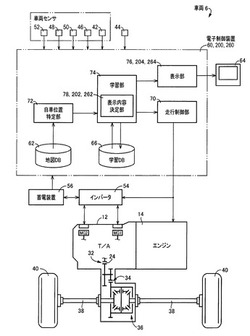
【図2】図1の車両用駆動装置を含むハイブリッド車両を制御するための電子制御装置に入力される信号を例示した図であると共に、その電子制御装置に備えられた制御機能の要部を説明するための機能ブロック線図である。
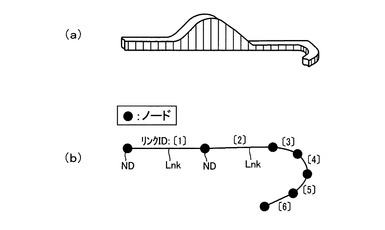
【図3】図2の電子制御装置がナビゲーション制御で利用する道路地図情報において、道路がどのようにして記憶されているかを説明するための図であり、(a)は実際の道路の概略図を示した図であり、(b)は上記道路地図情報の一部として記憶された上記道路を表現するノードおよびリンクを示した図である。
【図4】図1の車両用駆動装置を含むハイブリッド車両の走行データが蓄積されて得られた履歴情報を例示した図である。
【図5】図2の表示装置において自車位置周辺の道路が平面的に表示された実施例1の表示例を示す図である。
【図6】図2の表示装置において車両の進行方向にある道路が俯瞰的に表示された実施例1の表示例を示す図である。
【図7】実施例1での図2の電子制御装置の制御作動の要部、すなわち、走行データを履歴情報として蓄積し且つその履歴情報から得られる惰性走行制御に関する情報を表示する制御作動を説明するためのフローチャートである。
【図8】図7のSA7で実行されるサブルーチンを示したフローチャートである。
【図9】図2の表示装置において自車位置周辺の道路が平面的に表示された実施例2の表示例を示す図である。
【図10】実施例2での図2の電子制御装置の制御作動の要部を説明するためのフローチャートにおいて、その一部を、図7に対して異なるステップを示すために抜粋したフローチャートの抜粋図である。
【図11】図10のSA7−1で実行されるサブルーチンを示したフローチャートである。
【図12】実施例3での図2の電子制御装置の制御作動の要部を説明するためのフローチャートにおいて、その一部を、図7に対して異なるステップを示すために抜粋したフローチャートの抜粋図である。
【図13】図12のSA7−2で実行されるサブルーチンを示したフローチャートである。
【発明を実施するための形態】
【0016】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
【実施例1】
【0017】
図1は、本発明が適用されるハイブリッド車両6(以下、車両6という)に備えられた車両用駆動装置8を説明するための骨子図である。図1に示すように、車両用駆動装置8は、車体に取り付けられる非回転部材としてのトランスアクスルケース12(以下、「ケース12」という)、一般的に知られた自動車用ガソリンエンジンまたはディーゼルエンジンであるエンジン14、差動用電動機として機能する第1電動機MG1、走行用電動機として機能する第2電動機MG2、第1遊星歯車装置20、および第2遊星歯車装置22を備えている。エンジン14または第2電動機MG2の動力は、第1遊星歯車装置20および第2遊星歯車装置22のリングギヤR1,R2と一体回転する出力歯車24から、その出力歯車24を含むカウンタギヤ対32、ファイナルギヤ対34、差動歯車装置36および一対の車軸38等を順次介して一対の駆動輪40へ伝達される(図2参照)。
【0018】
第1遊星歯車装置20は、エンジン14に連結された第1キャリヤCA1と、第1電動機MG1に連結された第1サンギヤS1と、出力歯車24と一体回転する第1リングギヤR1とを備えている。また、第2遊星歯車装置22は、ケース12に連結され回転不能な第2キャリヤCA2と、第2電動機MG2に連結された第2サンギヤS2と、出力歯車24と一体回転する第2リングギヤR2とを備えている。
【0019】
第1電動機MG1及び第2電動機MG2は何れも、ジェネレータ(発電機)機能とモータ(発動機)機能との両方を備えた所謂モータジェネレータであり、例えば三相の同期電動発電機である。第1電動機MG1及び第2電動機MG2はそれぞれインバータ54(図2参照)を介して蓄電装置56に電気的に接続されており、第1電動機MG1と第2電動機MG2と蓄電装置56とは相互に電力授受可能な構成となっている。上記蓄電装置56は、例えば、鉛蓄電池などのバッテリ(二次電池)又はキャパシタなどである。
【0020】
上述のように構成された車両6は、走行用の駆動力源を、エンジン14のみ、第2電動機MG2のみ、或いは、エンジン14及び第2電動機MG2に適宜切り替えて走行することができる。すなわち、車両6は、走行用の駆動力源にエンジン14を含むエンジン走行、または、走行用の駆動力源が第2電動機MG2のみであるモータ走行をすることができる。
【0021】
また、加速操作が解除された惰性走行であるコースト走行時には、例えば、電子制御装置60は、車両状態が予め定められた制御実行条件を満たす場合に惰性走行制御を実行する。その惰性走行制御とは、第1電動機MG1を空転状態とすることでエンジン14と駆動輪40との間の動力伝達を遮断すると共にエンジン14を停止し第2電動機MG2も空転状態として惰性走行を行う走行制御である。また、本実施例において上記惰性走行制御は、本発明の所定の走行制御に対応する。
【0022】
図2は、車両6を制御するための車両用制御装置である電子制御装置60に入力される信号を例示した図であると共に、電子制御装置60に備えられた制御機能の要部を説明するための機能ブロック線図である。この電子制御装置60は、所謂マイクロコンピュータを含んで構成されている。電子制御装置60には、例えば図2に示すように、車両センサである各センサ42,46,48,50,52から各種信号が供給される。具体的には、アクセルペダルの操作量であるアクセル開度Accを表すアクセル開度センサ42からの信号、フットブレーキペダルの踏込量を表すフットブレーキセンサ46からの信号、各車輪に設けられたホイールブレーキ装置が発生させる機械的車両制動力を表すホイールブレーキセンサ48からの信号、車両6の前後方向の車両加速度を表す加速度センサ50からの信号、車速Vを表す車速センサ52からの信号、蓄電装置56の充電残量(充電状態)SOC(単位は例えばWh)を表すその蓄電装置56からの信号、車室内の空調装置であるエアコン44の作動状態(オン・オフ)を表すそのエアコン44からの信号等がそれぞれ、電子制御装置60に供給される。
【0023】
図2に示すように、電子制御装置60は公知のナビゲーション制御を実行する機能を有しており、そのナビゲーション制御を実行するために用いられる道路地図情報が記憶された地図データベース(地図DB)62を備えている。その地図データベース62はHDD(hard disk drive)などの不揮発性の記憶装置で構成されている。図3は、上記道路地図情報において、道路がどのようにして記憶されているかを説明するための図であり、図3(a)は実際の道路の概略図を示し、図3(b)は上記道路地図情報の一部として記憶された上記道路を表現するノードNDおよびリンクLnkを示している。この図3に示すように、実際の道路は、上記道路地図情報では、複数のノードNDにより分割され各ノードND間を結ぶ複数の区間としてのリンクLnkで表現されている。すなわち、上記リンクLnkは道路の一区間としての本発明の走行路に対応する。そして、各リンクLnkには、図3(b)に示すように、リンクID(道路番号)が決められている。また、各リンクID毎に、ノードNDにより定義される始点座標及び終点座標、走行路情報としての平均曲率半径と道路長と道路勾配、一般道や高速道路や一方通行などの道路種別、交差点や直線路における通過点などの各ノードNDにおける情報、などが地図データベース62に記憶されており、これらのリンクID毎の情報も上記道路地図情報に含まれている。
【0024】
図2の表示装置64は、車室内で運転者が視認し易いように設けられた液晶表示装置などの画像表示装置であり、電子制御装置60からの出力指示に従って画像を表示する。例えば、表示装置64は、電子制御装置60のナビゲーション制御における出力装置として機能しており、上記ナビゲーション制御により特定された自車位置、前記道路地図情報から抽出されたその自車位置周辺の道路地図、渋滞情報などを表示し、電子制御装置60からの出力指示に従って表示画像を逐次更新する。
【0025】
次に本実施例の制御機能の要部について、図2を用いて説明する。その図2に示すように、電子制御装置60は、走行制御手段としての走行制御部70と、自車位置特定手段としての自車位置特定部72と、学習手段としての学習部74と、表示手段としての表示部76とを備えている。
【0026】
走行制御部70は、車両状態が予め定められた制御実行条件を満たす場合に前記惰性走行制御を実行する。この惰性走行制御は、アクセルペダルが解放されたアクセルオフである場合、要するに加速操作が解除されている場合に実行される走行制御であって、車両6の燃費向上を目的として実行されるものであり、上記制御実行条件は、運転者に対して生じる違和感を抑えて車両6の燃費向上を図ることができるように予め実験的に設定されている。例えば、上記制御実行条件は、車速V、車両6の旋回半径、走行路面の勾配、および蓄電装置56の充電残量SOCなどがそれぞれ所定範囲内に入っている場合に満たされる条件であり、エアコン44のオンまたはオフに応じてその所定範囲は変更される。従って、走行制御部70が上記制御実行条件と比較する車両状態は、具体的には、その制御実行条件を定める車速V、車両6の旋回半径、走行路面の勾配、蓄電装置56の充電残量SOC、および、エアコン44の作動状態などで示される。また、走行制御部70は、上記惰性走行制御以外にも種々の走行制御を行う。例えば先の車両状態を履歴情報DThisに基づいて予測した先読み情報を学習部74から取得して、その先読み情報を利用して走行制御を行ってもよい。なお、本実施例で燃費は、単位燃料消費量当たりの走行距離で表されるもの(単位は例えばkm/L)であり、燃費の向上とはその単位燃料消費量当たりの走行距離が長くなることであり、逆に、燃費の低下(悪化)とはその単位燃料消費量当たりの走行距離が短くなることである。また、上記燃費は、車両全体としての燃料消費率(=燃料消費量/駆動輪出力)で表されても差し支えなく、そのようにしたとすれば、燃費の向上とは車両全体としての燃料消費率が小さくなることであり、逆に、燃費の低下とは車両全体としての燃料消費率が大きくなることである。
【0027】
自車位置特定部72は、GNSS(Global Navigation Satellite System)、および、車両センサにより検出される各検出情報(車両6の加速度、ヨーレート、車輪速、舵角など)を用いて、車両6の位置である自車位置、車速V、及び車両6の姿勢などを逐次算出する。そして、上記自車位置を前記道路地図情報に照合して、車両6が現在走行している走行路(リンクLnk)のリンクIDおよびその走行路での進行方向を特定する。要するに、公知のナビゲーションシステムで行われるマップマッチングを行う。
【0028】
学習部74は、自車位置特定部72から自車位置、車速V、現在走行している道路のリンクID、車両6の進行方向などの自車位置情報を自車位置特定部72から逐次取得しており、また、各センサなどから、蓄電装置56の充電残量SOC、エンジン14の燃料噴射量、エンジン回転速度Ne、アクセル開度Acc、フットブレーキペダルの踏込量などの車両情報を逐次取得している。そして、学習部74は、走行中の車両6が道路の一区間に相当する各リンクLnkを通過する毎に、すなわち、その車両6がそのリンクLnkの終点のノードNDに到達する毎に、その走行していたリンクLnkでの走行データをそのリンクLnkに関連付けて学習データベース66に記憶する。すなわち、車両6が上記リンクLnk(走行路)を走行したことで得られた上記走行データを履歴情報DThis(図4参照)として蓄積する学習制御を実行する。その学習データベース(学習DB)66は、上記走行データを記憶させるためのものであり、前記HDDなどの不揮発性の記憶装置で構成されている。上記履歴情報DThisとして蓄積される上記走行データについて図4を用いて説明する。
【0029】
図4は、上記走行データが蓄積されて得られた履歴情報DThisを例示した図である。その図4に示すように、上記履歴情報DThisでは、車速V、蓄電装置56に充電された充電量ΔSOC(単位は例えばWh)、走行回数NMrun、前記惰性走行制御の制御実行回数NMexc、前記惰性走行制御実行時の区間燃費FEsc、および上記惰性走行制御の強制終了の有無を含む走行データが、車両6の進行方向を表す往路または復路に分けて、リンクID毎に各リンクLnkに関連付けられて記憶されている。詳細に説明すると、上記履歴情報DThisの車速Vは、該当するリンクIDのリンクLnk(走行路)における車両走行毎の平均車速が平均化されて記憶されている。また、車両走行毎の上記充電量ΔSOCはリンクLnkの始点における蓄電装置56の充電残量SOCとそのリンクLnkの終点における蓄電装置56の充電残量SOCとの差分として算出することができ、上記履歴情報DThisの充電量ΔSOCは、車両走行毎の充電量ΔSOCが平均化されて記憶されている。また、上記履歴情報DThisの走行回数NMrunは、該当するリンクIDのリンクLnkを車両6が走行した回数である。また、上記履歴情報DThisの制御実行回数NMexcは、該当するリンクIDのリンクLnkを車両6が走行したときに前記惰性走行制御が正常に実行された回数である。その惰性走行制御が正常に実行されたとは、その惰性走行制御が瞬間的に実行された場合およびフェールセーフ等で強制終了させられた場合を除くという意味である。また、上記履歴情報DThisの区間燃費FEscは、上記惰性走行制御が上記正常に実行されたときの車両走行毎の区間燃費FEscが平均化されて記憶されている。また、上記履歴情報DThisの惰性走行制御の強制終了の有無は、直近の車両走行における上記強制終了の有無が記憶されている。
【0030】
学習部74は、上述した学習制御を実行することに加え、表示装置64にリンクLnk毎に表示させる画像の基になる前記惰性走行制御に関する表示内容を決定する表示内容決定部78を備えている。表示内容決定手段としての表示内容決定部78は、その表示内容を決定するために、先ず、自車位置特定部72から得られる車両6の現在位置すなわち前記自車位置に基づいて前記道路地図情報から、上記惰性走行制御に関する表示内容を決定する対象のリンクLnkである対象リンクLNKiを決定する。例えば、表示内容決定部78は、上記自車位置を基準とした所定範囲RGi内のリンクLnkを対象リンクLNKiとして決定する。詳細に言えば、上記自車位置から道のりで、上記所定範囲RGiに対応して予め定められた規定距離内に存在するリンクLnkを、表示装置64に表示されるリンクLnkであることを条件に全て対象リンクLNKiとして決定する。従って、その対象リンクLNKiは通常は複数存在する。上記規定距離は、運転者が上記自車位置の周辺であると認識できる程度に予め実験的に設定されている。
【0031】
表示内容決定部78は、上記対象リンクLNKiを決定すると、前記惰性走行制御に関する表示内容を決定する便宜上、その対象リンクLNKiの各々に対して種々のフラグを設ける。具体的には、上記対象リンクLNKiの各々に対して、上記表示内容の決定が完了したことを示す完了フラグFLG_endと、現在の車両状態で前記惰性走行制御が上記対象リンクLNKiにて実行されると推定(予測)されることを示す制御実行推定フラグFLG_okと、所定の減速をすれば前記惰性走行制御が上記対象リンクLNKiにて実行されると推定されることを示す減速時制御実行推定フラグFLG_spddwnと、所定の増速をすれば前記惰性走行制御が上記対象リンクLNKiにて実行されると推定されることを示す増速時制御実行推定フラグFLG_spdupと、エアコン44をオフにすれば前記惰性走行制御が上記対象リンクLNKiにて実行されると推定されることを示すエアコンオフ時制御実行推定フラグFLG_acoffとを設ける。このときの各フラグFLG_end,FLG_ok,FLG_spddwn,FLG_spdup,FLG_acoffの値は全て初期値である零である。表示内容決定部78は、それらのフラグFLG_end,FLG_ok,FLG_spddwn,FLG_spdup,FLG_acoffを設けると、上記対象リンクLNKi毎に、前記惰性走行制御に関する表示内容を決定する表示内容決定制御を行い、その表示内容決定制御が完了した対象リンクLNKiの完了フラグFLG_endを0から1に切り換える。従って、全ての対象リンクLNKiの完了フラグFLG_endが1になれば、上記表示内容の決定が完了したということになる。
【0032】
本実施例の前記表示内容決定制御について説明すると、表示内容決定部78は、全ての対象リンクLNKiについて前記惰性走行制御に関する表示内容を決定するために、先ず、完了フラグFLG_endが0に設定されている対象リンクLNKiの中から、1つの対象リンクLNKiを選択する。この選択した対象リンクLNKiを選択リンクLNKsという。表示内容決定部78は、その選択リンクLNKsを定めると、前記履歴情報DThisから、車速V、蓄電装置56の充電残量SOC、エアコン44のオンまたはオフ、およびアクセル開度Accなどの個々の状態パラメータで表される現在の車両状態に基づいて、車両6が上記選択リンクLNKsに至ったとしたときの車両状態、すなわち、その選択リンクLNKsにおける推定車両状態を推定する。具体的には、個々の上記状態パラメータ毎に予め定められた推定方法に従って上記選択リンクLNKsにおける状態パラメータの各々を推定することで、その選択リンクLNKsにおける推定車両状態を推定する。例えば、その推定車両状態を構成する車速Vは、前記履歴情報DThisにおいて、車両6が現在走行しているリンクLnkのリンクIDに対応する車速Vに対する選択リンクLNKsのリンクIDに対応する車速Vの比率が算出され、現在の車速Vがその算出された車速Vの比率と同じ比率で変化するものとして算出される。また、上記推定車両状態を構成する蓄電装置56の充電残量SOCは、前記履歴情報DThisにおいて、車両6が現在走行しているリンクLnkから選択リンクLNKsに至る経路を構成する全てのリンクLnkのリンクIDに対応する充電量ΔSOCが積算され、現在の充電残量SOCがその積算された充電量ΔSOC分だけ変化するものとして算出される。また、上記推定車両状態を構成するエアコン44の作動状態(オンまたはオフ)は、現在の作動状態がそのまま継続するものとして推定される。また、上記推定車両状態を構成する車両6の旋回半径は、前記道路地図情報から得られる選択リンクLNKsの平均曲率半径で車両6が旋回するものとして推定される。また、上記推定車両状態を構成するアクセル開度Accは、アクセルオフが前記惰性走行制御が実行される必須条件であるので、現在にアクセル開度Accに関係なくアクセルオフであると推定される。
【0033】
表示内容決定部78は、このようにして上記選択リンクLNKsにおける推定車両状態を推定すると、その推定車両状態の下で前記惰性走行制御が実行されるか否か、すなわち、その推定車両状態が前記制御実行条件を満たすか否かを判断する。その判断の結果、上記推定車両状態が前記制御実行条件を満たす場合には、その選択リンクLNKsの制御実行推定フラグFLG_okを0から1に切り換える。要するに、表示内容決定部78は、後述する所定の変更を現在の車両状態に加えなくてもその現在の車両状態に基づいて、前記惰性走行制御が実行されると予測される場合には、上記選択リンクLNKsの制御実行推定フラグFLG_okを0から1に切り換える。そして、その制御実行推定フラグFLG_okの設定切換後、上記選択リンクLNKsの完了フラグFLG_endを0から1に切り換える。
【0034】
その一方で、表示内容決定部78は、上記推定車両状態が前記制御実行条件を満たさない場合には、前記現在の車両状態に数種類の所定の変更を加えた場合を想定した上で、前記推定車両状態が前記制御実行条件を満たすか否かを判断する。具体的には、予め定められた減速量以内の範囲で車速Vを低下させるという所定の変更を前記現在の車両状態に加えた車両状態を想定し、その想定した車両状態に基づいて改めて推定した推定車両状態が前記制御実行条件を満たすか否かを判断する。その判断の結果、その改めて推定した推定車両状態が上記制御実行条件を満たす場合には、上記選択リンクLNKsの減速時制御実行推定フラグFLG_spddwnを0から1に切り換える。要するに、表示内容決定部78は、前記予め定められた減速量以内の範囲で車速Vを低下させるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測される場合には、上記選択リンクLNKsの減速時制御実行推定フラグFLG_spddwnを0から1に切り換える。また、表示内容決定部78は、予め定められた増速量以内の範囲で車速Vを上昇させるという所定の変更を前記現在の車両状態に加えた車両状態を想定し、その想定した車両状態に基づいて改めて推定した推定車両状態が前記制御実行条件を満たすか否かを判断する。その判断の結果、その改めて推定した推定車両状態が上記制御実行条件を満たす場合には、上記選択リンクLNKsの増速時制御実行推定フラグFLG_spdupを0から1に切り換える。要するに、表示内容決定部78は、前記予め定められた増速量以内の範囲で車速Vを上昇させるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測される場合には、上記選択リンクLNKsの増速時制御実行推定フラグFLG_spdupを0から1に切り換える。また、表示内容決定部78は、前記現在の車両状態においてエアコン44がオンであればそのエアコン44がオフにされるという所定の変更を上記現在の車両状態に加えた車両状態を想定し、その想定した車両状態に基づいて改めて推定した推定車両状態が前記制御実行条件を満たすか否かを判断する。その判断の結果、その改めて推定した推定車両状態が上記制御実行条件を満たす場合には、上記選択リンクLNKsのエアコンオフ時制御実行推定フラグFLG_acoffを0から1に切り換える。要するに、表示内容決定部78は、前記エアコン44がオフにされるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測される場合には、上記選択リンクLNKsのエアコンオフ時制御実行推定フラグFLG_acoffを0から1に切り換える。このようにして一連のフラグFLG_spddwn,FLG_spdup,FLG_acoffの切換を判断し終えた場合にも、選択リンクLNKsの完了フラグFLG_endを0から1に切り換える。なお、車両状態を想定する際に用いられる上記減速量及び上記増速量は、運転者が前記惰性走行制御を実行させるように行う僅かの車両操作に相当するように予め実験的に定められている。
【0035】
上記のように1つの選択リンクLNKsについて完了フラグFLG_endが1に切り換えられた場合には、再び、完了フラグFLG_endが0に設定されている対象リンクLNKiの中から、1つの対象リンクLNKiが選択リンクLNKsとして選択される。そして、全ての対象リンクLNKiの完了フラグFLG_endが1になるまで、本実施例の前記表示内容決定制御が繰り返し実行される。
【0036】
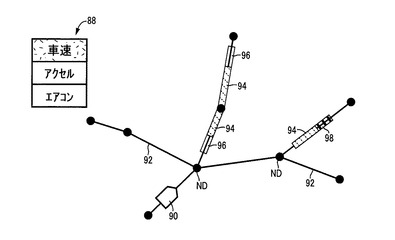
表示部76は、公知のナビゲーションシステムと同様にして、自車位置と自車位置周辺の道路などを含む地図とを表示装置64に表示し、その表示装置64の表示画像を逐次更新する。更に、表示内容決定部78が定めた各フラグFLG_ok,FLG_spddwn,FLG_spdup,FLG_acoffが示す情報を、リンクLnkを表す模様または色彩を変更することで、前記対象リンクLNKiに関連付けて表示装置64に表示する。その表示例が図5に示されている。図5は道路を平面的に表示した表示例である。例えば、表示装置64には、運転者によるボタン操作などよって、前記現在の車両状態に加えることを想定する前記所定の変更が、車速Vの増減、アクセル操作、またはエアコン44の作動状態変更の何れかに選択されて表示されるようになっており、図5では、上記車速Vの増減が選択されており、選択画像88がそのことを示している。そして、図5では、自車画像90は車両6を表す画像であって自車位置および進行方向を示しており、前記ノードNDが抜粋されて表示されており、実線92は前記リンクLnkの連なりである道路を示している。上記自車画像90では、その自車画像90が配設された上記実線92の長手方向に突き出た側が車両6の進行方向を示している。また、表示装置64には道路の所定区間を示す第1道路画像94、第2道路画像96、第3道路画像98が表示されており、その第1道路画像94は、前記惰性走行制御が実行されると予測される走行路を表す画像、すなわち、前記制御実行推定フラグFLG_okが1に設定された対象リンクLNKiを表す画像である。また、上記第1道路画像94に直列に連なる第2道路画像96は、前記予め定められた減速量以内の範囲で車速Vを低下させるという所定の変更を前記現在の車両状態に加えれば前記惰性走行制御が実行されると予測される走行路を表す画像、すなわち、前記減速時制御実行推定フラグFLG_spddwnが1に設定された対象リンクLNKiを表す画像である。また、上記第1道路画像94に直列に連なる第3道路画像98は、前記予め定められた増速量以内の範囲で車速Vを上昇させるという所定の変更を前記現在の車両状態に加えれば前記惰性走行制御が実行されると予測される走行路を表す画像、すなわち、前記増速時制御実行推定フラグFLG_spdupが1に設定された対象リンクLNKiを表す画像である。上記第1道路画像94、第2道路画像96、および第3道路画像98は、何れも前記実線92よりも太い帯状をしており、互いに異なる模様または色彩で表示されている。
【0037】
また、運転者のボタン操作などにより、前記現在の車両状態に加えることを想定する所定の変更が、例えばエアコン44の作動状態変更に切り換えられれば、表示部76は、前記選択画像88の表示を、「エアコン」が選択されていることを示すように切り替える。そして、前記第1道路画像94を図5と同様にそのまま表示するが、第2道路画像96および第3道路画像98は表示しない。その替わりに、表示部76は、エアコン44がオフにされるという所定の変更を前記現在の車両状態に加えれば前記惰性走行制御が実行されると予測される走行路を表す所定の帯状の道路画像、すなわち、エアコンオフ時制御実行推定フラグFLG_acoffが1に設定された対象リンクLNKiを表す所定の帯状の道路画像を表示する。
【0038】
また、上記図5は道路を平面的に表示した表示例であるが、表示部76は、図6に示すように、表示装置64に道路を俯瞰的に表示しても差し支えない。例えば、図6では、車両6が自車画像100で表されている。そして、その車両6の進路を構成する道路の画像102に重ねて、前記制御実行推定フラグFLG_okが1に設定された対象リンクLNKiを表す画像104と、前記減速時制御実行推定フラグFLG_spddwnが1に設定された対象リンクLNKiを表す画像106とが直列的に表示されている。上記画像102,104,106はそれぞれ、相互に異なる所定の模様又は色彩で表示されている。
【0039】
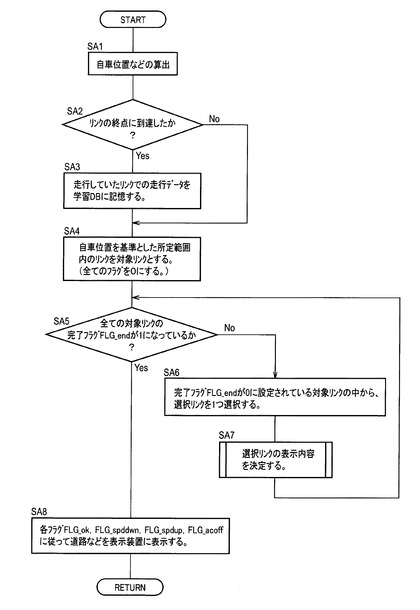
図7は、電子制御装置60の制御作動の要部、すなわち、前記走行データを前記履歴情報DThisとして蓄積し且つその履歴情報DThisから得られる前記惰性走行制御に関する情報を表示する制御作動を説明するためのフローチャートであり、例えば数msecから数十msec程度の極めて短いサイクルタイムで繰り返し実行される。この図7に示す制御作動は、単独で或いは他の制御作動と並列的に実行される。
【0040】
先ず、図7のステップ(以下、「ステップ」を省略する)SA1においては、車両6の位置である自車位置、車速V、及び車両6の姿勢などが逐次算出される。そして、上記自車位置が前記道路地図情報に照合されて、車両6が現在走行している走行路(リンクLnk)のリンクIDおよびその走行路での進行方向が特定される。所謂マップマッチングが行われる。SA1の次はSA2に移る。なお、SA1は自車位置特定部72に対応する。
【0041】
学習部74に対応するSA2においては、上記SA1にて算出された自車位置から、車両6が個々のリンクLnkの終点のノードNDに到達したか否かが判断される。このSA2の判断が肯定された場合、すなわち、車両6が上記リンクLnkの終点のノードNDに到達した場合には、SA3に移る。一方、このSA2の判断が否定された場合には、SA4に移る。
【0042】
学習部74に対応するSA3においては、走行していたリンクLnkでの走行データ、すなわち、SA2にて車両6が到達したと判断されたノードNDを終点とするリンクLnkでの走行データが、そのリンクLnkに関連付けて学習データベース66に記憶される。すなわち、車両6が上記リンクLnkを走行したことで得られた上記走行データが履歴情報DThisとして蓄積される。SA3の次はSA4に移る。
【0043】
表示内容決定部78に対応するSA4においては、前記対象リンクLNKiが決定される。例えば、SA1にて特定された前記自車位置を基準とした所定範囲RGi内の1又は2以上のリンクLnkが上記対象リンクLNKiとして決定される。そして、その対象リンクLNKiの各々に対して、初期値(=0)に設定された複数のフラグFLG_end,FLG_ok,FLG_spddwn,FLG_spdup,FLG_acoffが設けられる。SA4の次はSA5に移る。
【0044】
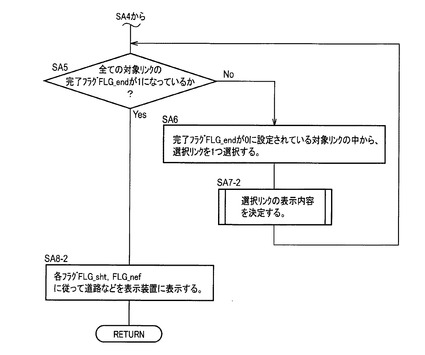
表示内容決定部78に対応するSA5においては、全ての対象リンクLNKiの完了フラグFLG_endが1になっているか否かが判断される。全ての対象リンクLNKiの完了フラグFLG_endが1になっているということは、全ての対象リンクLNKiについて前記惰性走行制御に関する表示内容を決定することが完了したということを示すからである。このSA5の判断が肯定された場合、すなわち、全ての対象リンクLNKiの完了フラグFLG_endが1になっている場合には、SA8に移る。一方、このSA5の判断が否定された場合には、SA6に移る。
【0045】
表示内容決定部78に対応するSA6においては、完了フラグFLG_endが0に設定されている対象リンクLNKiの中から、1つの対象リンクLNKiが前記選択リンクLNKsとして選択される。SA6の次はSA7に移る。
【0046】
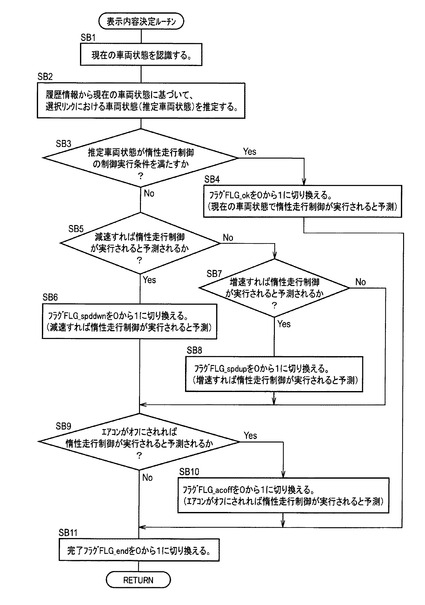
SA7においては、図8のフローチャートが実行される。その図8は、このSA7で実行されるサブルーチンを示したフローチャートである。図8の全ステップは表示内容決定部78に対応する。
【0047】
図8のSB1においては、車速V、蓄電装置56の充電残量SOC、エアコン44のオンまたはオフ、およびアクセル開度Accなどの個々の状態パラメータで表される現在の車両状態が認識される。SB1の次はSB2に移る。
【0048】
SB2においては、図7のSA6にて選択された選択リンクLNKsにおける前記推定車両状態が、前記履歴情報DThisから、上記SB1にて認識された現在の車両状態に基づいて推定される。SB2の次はSB3に移る。
【0049】
SB3においては、上記SB2にて推定された推定車両状態の下で前記惰性走行制御が実行されるか否か、すなわち、その推定車両状態が前記制御実行条件を満たすか否かが判断される。このSB3の判断が肯定された場合、すなわち、上記推定車両状態が上記制御実行条件を満たす場合には、SB4に移る。一方、このSB3の判断が否定された場合には、SB5に移る。
【0050】
SB4においては、前記選択リンクLNKsの制御実行推定フラグFLG_okが0から1に切り換えられる。SB4の次はSB11に移る。
【0051】
SB5においては、前記予め定められた減速量以内の範囲で車速Vを低下させるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測されるか否かが判断される。このSB5の判断が肯定された場合、すなわち、前記予め定められた減速量以内の範囲で車速Vを低下させるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測される場合には、SB6に移る。一方、このSB5の判断が否定された場合には、SB7に移る。
【0052】
SB6においては、前記選択リンクLNKsの減速時制御実行推定フラグFLG_spddwnが0から1に切り換えられる。SB6の次はSB9に移る。
【0053】
SB7においては、前記予め定められた増速量以内の範囲で車速Vを上昇させるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測されるか否かが判断される。このSB7の判断が肯定された場合、すなわち、前記予め定められた増速量以内の範囲で車速Vを上昇させるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測される場合には、SB8に移る。一方、このSB7の判断が否定された場合には、SB9に移る。
【0054】
SB8においては、前記選択リンクLNKsの増速時制御実行推定フラグFLG_spdupが0から1に切り換えられる。SB8の次はSB9に移る。
【0055】
SB9においては、前記エアコン44がオフにされるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測されるか否かが判断される。このSB9の判断が肯定された場合、すなわち、前記エアコン44がオフにされるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測される場合には、SB10に移る。一方、このSB9の判断が否定された場合には、SB11に移る。
【0056】
SB10においては、前記選択リンクLNKsのエアコンオフ時制御実行推定フラグFLG_acoffが0から1に切り換えられる。SB10の次はSB11に移る。
【0057】
SB11においては、前記選択リンクLNKsの完了フラグFLG_endが0から1に切り換えられる。このSB11での完了フラグFLG_endの設定切換が完了すると、図7のSA7の次のステップであるSA5に移る。
【0058】
図7に戻り、表示部76に対応するSA8においては、例えば図5に示すように、前記制御実行推定フラグFLG_ok、減速時制御実行推定フラグFLG_spddwn、および増速時制御実行推定フラグFLG_spdupの値に従って、第1道路画像94、第2道路画像96、および第3道路画像98を含む自車位置周辺の道路などの画像が、自車画像90と共に表示装置64に表示される。また、運転者のボタン操作などにより、前記現在の車両状態に加えることを想定する所定の変更が、例えばエアコン44の作動状態変更に切り換えられれば、エアコンオフ時制御実行推定フラグFLG_acoffの値に従って、所定の道路画像が表示される。
【0059】
本実施例では次のような効果(A1)から(A3)がある。(A1)本実施例によれば、学習部74は、走行中の車両6が各リンクLnkを通過する毎に、車両6がリンクLnk(走行路)を走行したことで得られた前記走行データを履歴情報DThisとして蓄積する前記学習制御を実行する。また、表示内容決定部78は、前記履歴情報DThisから現在の車両状態に基づいて、前記惰性走行制御(所定の走行制御)が実行されると予測される場合には、上記選択リンクLNKsの制御実行推定フラグFLG_okを0から1に切り換える。そして、表示部76は、前記制御実行推定フラグFLG_okが1に設定された対象リンクLNKiを前記第1道路画像94で表示装置64に表示する。すなわち、表示部76は、前記履歴情報DThisから現在の車両状態に基づいて、前記惰性走行制御(所定の走行制御)が実行されると予測されるということを、車両6の現在位置(自車位置)を基準とした前記所定範囲RGi内の走行路(リンクLnk)に関連付けて表示装置64に表示する。従って、運転者が上記現在の車両状態を変化させれば、上記惰性走行制御が実行されると予測される走行路(リンクLnk)が異なり、それが表示装置64に表示されるので、電子制御装置60は、どのような車両操作により上記惰性走行制御が実行され易くなるかということを把握することができる情報を、例えば運転者に対して提示することができる。そうなれば、例えば運転者は上記惰性走行制御による燃費向上というメリットを意識的に引き出すように、車両6を走行させることが可能である。また、運転者に上記惰性走行制御が実行され易い走行を認識させることが可能であり、その惰性走行制御によるメリットを運転者に実感させ易くなる。
【0060】
(A2)また、本実施例によれば、表示内容決定部78は、例えば前記予め定められた減速量以内の範囲で車速Vを低下させるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測される場合には、前記選択リンクLNKsの減速時制御実行推定フラグFLG_spddwnを0から1に切り換える。そして、表示部76は、前記減速時制御実行推定フラグFLG_spddwnが1に設定された対象リンクLNKiを前記第2道路画像96で表示装置64に表示する。すなわち、表示部76は、前記履歴情報DThisから現在の車両状態に基づいて、その現在の車両状態に上記所定の変更を加えれば前記惰性走行制御(所定の走行制御)が実行されると予測されるということを、前記所定範囲RGi内の走行路(リンクLnk)に関連付けて表示装置64に表示する。従って、前記惰性走行制御が実行される区間がどのような車両操作により増やすことができるのかということが表示装置64に示唆されるので、前記惰性走行制御の実行の可否と車両操作との相関関係が理解され易くなる。また、前記惰性走行制御を実行させる実感を運転者に与えることが可能である。
【0061】
(A3)また、本実施例によれば、表示内容決定部78は、前記所定範囲RGi内のリンクLnkである前記対象リンクLNKi毎に、前記履歴情報DThisから現在の車両状態に基づいてリンクLnk(選択リンクLNKs)における前記推定車両状態を推定する。そして、その推定車両状態が前記惰性走行制御(所定の走行制御)の前記制御実行条件を満たす場合には、その選択リンクLNKsの制御実行推定フラグFLG_okを0から1に切り換える。要するに、その選択リンクLNKsにおいて前記惰性走行制御が実行されると予測されるものとする。従って、電子制御装置60は、上記制御実行条件を用いることで、前記惰性走行制御が実行されると予測されるか否かを明確に判別することができる。
【0062】
次に、本発明の他の実施例について説明する。なお、以下の実施例の説明において、実施例相互に重複する部分については、同一の符号を付してその説明を省略する。
【実施例2】
【0063】
本実施例の機能ブロック線図は、前述の実施例1と同じ図2である。図2に示すように、本実施例の車両用制御装置である電子制御装置200は、実施例1の電子制御装置60と同様に走行制御部70と自車位置特定部72と学習部74とを備えている。しかし、上記電子制御装置60とは異なり、電子制御装置200は、表示部76ではなく表示部204を備え、上記学習部74は、表示内容決定部78ではなく表示内容決定部202を備えている。
【0064】
表示内容決定手段としての表示内容決定部202は、前述の実施例1の表示内容決定部78と比較して、主に、切換設定するフラグの種類が異なる。表示内容決定部202は、上記表示内容決定部78と同様にして、1または2以上の前記対象リンクLNKiを決定する。そして、表示内容決定部202は、その対象リンクLNKiを決定すると、その対象リンクLNKiの各々に対して種々のフラグを設ける。具体的には、上記対象リンクLNKiの各々に対して、前記完了フラグFLG_endと、前記惰性走行制御の実行頻度FCYexcが高いほど大きな値が設定される制御実行頻度フラグFLG_fcyexcと、前記惰性走行制御の効果が高いほど大きな値が設定される制御実行効果フラグFLG_efctとを設ける。このときの各フラグFLG_end,FLG_fcyexc,FLG_efctの値は全て初期値である零である。表示内容決定部202は、それらのフラグFLG_end,FLG_fcyexc,FLG_efctを設けると、上記対象リンクLNKi毎に、前記惰性走行制御に関する表示内容を決定する表示内容決定制御を行い、その表示内容決定制御が完了した対象リンクLNKiの完了フラグFLG_endを0から1に切り換える。
【0065】
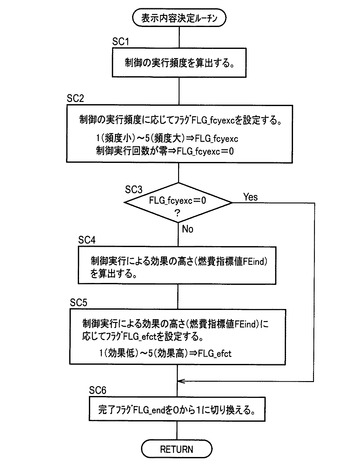
本実施例の前記表示内容決定制御について説明すると、表示内容決定部202は、全ての対象リンクLNKiについて前記惰性走行制御に関する表示内容を決定するために、先ず、完了フラグFLG_endが0に設定されている対象リンクLNKiの中から、1つの対象リンクLNKiを選択する。この選択した対象リンクLNKiを選択リンクLNKsという。これは前述の実施例1と同じである。表示内容決定部202は、その選択リンクLNKsを定めると、前記履歴情報DThisから、上記選択リンクLNKsのリンクIDに対応する前記走行回数NMrunと前記惰性走行制御の制御実行回数NMexcとを読み出し、その読み出した走行回数NMrunと制御実行回数NMexcとに基づいて上記選択リンクLNKsにおける前記惰性走行制御の実行頻度FCYexc(=NMexc/NMrun)を算出する。そして、表示内容決定部202は、その算出した実行頻度FCYexcが高いほど、前記選択リンクLNKsの制御実行頻度フラグFLG_fcyexcに大きな値を設定する。上記実行頻度FCYexcはそれの算出式から判るように0〜1の値をとり得る。例えば、制御実行回数NMexcが零すなわち実行頻度FCYexcが零であれば、表示内容決定部202は、上記制御実行頻度フラグFLG_fcyexcを初期値(=0)のままにする。また、実行頻度FCYexcが零よりも大きく且つ1以下の範囲(0<FCYexc≦1)にわたって実行頻度FCYexcの低い側から順に連続的に、第1実行頻度範囲、第2実行頻度範囲、第3実行頻度範囲、第4実行頻度範囲、および第5実行頻度範囲が、制御実行頻度フラグFLG_fcyexcを設定するために予め実験的に設定されている。そして、上記算出した実行頻度FCYexcが上記第1実行頻度範囲内であれば、表示内容決定部202は、上記制御実行頻度フラグFLG_fcyexcを1に設定する。また、上記算出した実行頻度FCYexcが上記第2実行頻度範囲内であれば、表示内容決定部202は、上記制御実行頻度フラグFLG_fcyexcを2に設定する。また、上記算出した実行頻度FCYexcが上記第3実行頻度範囲内であれば、表示内容決定部202は、上記制御実行頻度フラグFLG_fcyexcを3に設定する。また、上記算出した実行頻度FCYexcが上記第4実行頻度範囲内であれば、表示内容決定部202は、上記制御実行頻度フラグFLG_fcyexcを4に設定する。また、上記算出した実行頻度FCYexcが上記第5実行頻度範囲内であれば、すなわち、その算出した実行頻度FCYexcが上記第4実行頻度範囲の上限値を超えて高ければ、表示内容決定部202は、上記制御実行頻度フラグFLG_fcyexcを5に設定する。表示内容決定部202は、このように前記実行頻度FCYexcの高さに応じて上記制御実行頻度フラグFLG_fcyexcを設定すると、その設定後の制御実行頻度フラグFLG_fcyexcが0である場合には、前記選択リンクLNKsの完了フラグFLG_endを0から1に切り換える。その一方で、表示内容決定部202は、その設定後の制御実行頻度フラグFLG_fcyexcが0ではない場合すなわち1〜5の何れかである場合には、前記選択リンクLNKsの制御実行効果フラグFLG_efctの切換設定を行う。
【0066】
具体的に、表示内容決定部202は、上記制御実行効果フラグFLG_efctの切換設定を行う際には、先ず、前記履歴情報DThisから前記惰性走行制御の効果を定量的に表す。例えば、表示内容決定部202は、前記履歴情報DThisから、前記選択リンクLNKsのリンクIDに対応する前記惰性走行制御実行時の区間燃費FEscを読み出す。その区間燃費FEscは上記惰性走行制御の効果を表すからである。そして、各リンクLnk毎に基準区間燃費FE0scが予め実験的に求められ設定されており、表示内容決定部202は、上記読み出した区間燃費FEscを、上記選択リンクLNKsのリンクIDに対応する上記基準区間燃費FE0scで除して、その選択リンクLNKsの燃費指標値FEind(=FEsc/FE0sc)を算出する。このように燃費指標値FEindを算出するのは、リンクLnkが異なれば燃費に影響する走行抵抗などが異なるので、無次元化された燃費の良否を判断できる指標値を得るためである。上記基準区間燃費FE0scは、例えば、前記惰性走行制御が実行されずに車両6がリンクLnkを走行するとして実験的に得られたリンクLnk毎の燃費である。上記燃費指標値FEindは上記惰性走行制御の効果を表す指標値であり、その燃費指標値FEindの算出方法から判るように、燃費指標値FEindは、上記惰性走行制御の効果が高いほど、すなわち、燃費が良いほど、大きい値になる。表示内容決定部202は、上記選択リンクLNKsの燃費指標値FEindを算出すると、その燃費指標値FEindが大きいほど、すなわち、上記惰性走行制御の効果が高いほど、上記選択リンクLNKsの制御実行効果フラグFLG_efctに大きな値を設定する。例えば、上記燃費指標値FEindがとり得る最大変化範囲が予め実験的に求められており、その燃費指標値FEindの最大変化範囲が5分割され、その最大変化範囲の全体にわたって燃費指標値FEindの小さい側から順に連続的に、第1燃費指標値範囲、第2燃費指標値範囲、第3燃費指標値範囲、第4燃費指標値範囲、および第5燃費指標値範囲が、上記制御実行効果フラグFLG_efctを設定するために予め実験的に設定されている。そして、上記燃費指標値FEindが上記第1燃費指標値範囲内であれば、表示内容決定部202は、上記制御実行効果フラグFLG_efctを1に設定する。また、上記燃費指標値FEindが上記第2燃費指標値範囲内であれば、表示内容決定部202は、上記制御実行効果フラグFLG_efctを2に設定する。また、上記燃費指標値FEindが上記第3燃費指標値範囲内であれば、表示内容決定部202は、上記制御実行効果フラグFLG_efctを3に設定する。また、上記燃費指標値FEindが上記第4燃費指標値範囲内であれば、表示内容決定部202は、上記制御実行効果フラグFLG_efctを4に設定する。また、上記燃費指標値FEindが上記第5燃費指標値範囲内であれば、すなわち、その燃費指標値FEindが上記第4燃費指標値範囲の上限値を超えて大きければ、表示内容決定部202は、上記制御実行効果フラグFLG_efctを5に設定する。表示内容決定部202は、このように上記燃費指標値FEindに応じて上記制御実行効果フラグFLG_efctを設定した後、前記選択リンクLNKsの完了フラグFLG_endを0から1に切り換える。
【0067】
上記のように1つの選択リンクLNKsについて完了フラグFLG_endが1に切り換えられた場合には、前述の実施例1の表示内容決定部78と同様に、再び、完了フラグFLG_endが0に設定されている対象リンクLNKiの中から、1つの対象リンクLNKiが選択リンクLNKsとして選択される。そして、全ての対象リンクLNKiの完了フラグFLG_endが1になるまで、本実施例の前記表示内容決定制御が繰り返し実行される。
【0068】
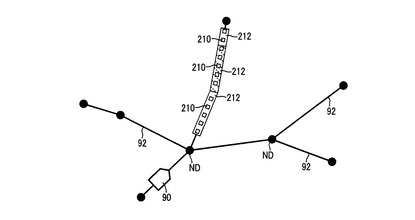
表示部204は、公知のナビゲーションシステムのように自車位置と自車位置周辺の道路などを含む地図とを表示装置64に表示することは、前述の実施例1の表示部76と同じである。但し、表示内容決定部202がフラグFLG_fcyexc,FLG_efctを設定するので、それに合わせて、表示部204は、表示内容決定部202が定めた各フラグFLG_fcyexc,FLG_efctが示す情報を、リンクLnkを表す模様または色彩を変更することで、前記対象リンクLNKiに関連付けて表示装置64に表示する。この点が上記表示部76とは異なる。上記各フラグFLG_fcyexc,FLG_efctが示す情報が表示部204により表示装置64に表示された表示例が図9に示されている。図9は道路を平面的に表示した表示例である。例えば、図9では、前記図5と同様に、自車画像90が自車位置および進行方向を示しており、前記ノードNDが抜粋されて表示されており、実線92は前記リンクLnkの連なりである道路を示している。また、表示装置64には道路の所定区間を示す制御実行道路画像210と制御効果画像212とが表示されている。具体的に、その制御実行道路画像210と制御効果画像212とは互いに同じリンクLnkに対応して表示される画像、詳細には、前記制御実行頻度フラグFLG_fcyexcが1以上に設定された対象リンクLNKiに対応して重畳的に表示される画像であり、制御実行道路画像210は、点状の図形が上記実線92に沿って連なった点線画像である。そして、表示部204は、上記制御実行道路画像210の色彩を、その制御実行道路画像210に対応するリンクLnkの上記制御実行頻度フラグFLG_fcyexcの値が大きいほど濃く表示する。すなわち、上記制御実行道路画像210の色彩の濃淡で、前記履歴情報DThisに基づいて得た前記惰性走行制御の実行頻度FCYexcの高さを、車両6の現在位置を基準とした前記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。また、前記制御効果画像212は、前記制御実行道路画像210に重なるその制御実行道路画像210よりも幅広の帯状の画像である。そして、表示部204は、上記制御効果画像212を制御実行道路画像210と容易に区別できるように互いに異なる模様又は色彩で表示し、その制御効果画像212の色彩を、その制御効果画像212に対応するリンクLnkの上記制御実行効果フラグFLG_efctの値が大きいほど濃く表示する。すなわち、上記制御効果画像212の色彩の濃淡で、前記履歴情報DThisに基づいて得た前記惰性走行制御の実行による効果の程度(燃費指標値FEindの大小)を、前記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。
【0069】
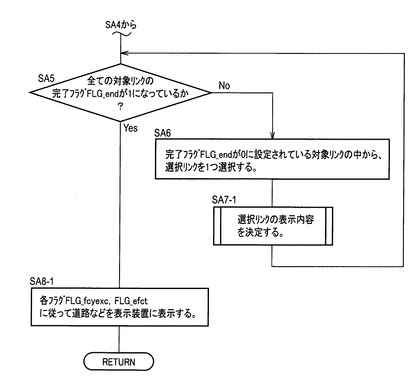
図10は、電子制御装置200の制御作動の要部を説明するためのフローチャートにおいて、その一部を、前述の実施例1のフローチャートを示す図7に対して異なるステップSA7−1,SA8−1を示すために抜粋したフローチャートの抜粋図である。この図10で説明される制御作動は、単独で或いは他の制御作動と並列的に実行される。図10に示すように、前記図7のフローチャートのSA7とSA8とがそれぞれ、図10のフローチャートではSA7−1とSA8−1とに置き換えられており、前記図7のフローチャートのSA1〜SA6は図10のフローチャートでも同じである。そこで、実施例1と共通するSA1〜SA6についての説明は省略する。なお、本実施例において、SA4、SA5、及びSA6は表示内容決定部202に対応する。
【0070】
前記SA6に続くSA7−1においては、図11のフローチャートが実行される。その図11は、このSA7−1で実行されるサブルーチンを示したフローチャートである。図11の全ステップは表示内容決定部202に対応する。
【0071】
図11のSC1においては、前記履歴情報DThisから、図10のSA6にて選択された前記選択リンクLNKsのリンクIDに対応する前記走行回数NMrunと前記惰性走行制御の制御実行回数NMexcとが読み出され、その選択リンクLNKsにおける前記惰性走行制御の実行頻度FCYexcが、その読み出された走行回数NMrunと制御実行回数NMexcとに基づいて算出される。SC1の次はSC2に移る。
【0072】
SC2においては、上記選択リンクLNKsの制御実行頻度フラグFLG_fcyexcが、SC1にて算出された実行頻度FCYexcに応じて設定される。その制御実行頻度フラグFLG_fcyexcはその実行頻度FCYexcが高いほど大きな値に設定され、例えば、制御実行回数NMexcが零すなわち実行頻度FCYexcが零であれば初期値(=0)のままにされる。SC2の次はSC3に移る。
【0073】
SC3においては、上記制御実行頻度フラグFLG_fcyexcが零であるか否かが判断される。このSC3の判断が肯定された場合、すなわち、上記制御実行頻度フラグFLG_fcyexcが零である場合には、SC6に移る。一方、このSC3の判断が否定された場合には、SC4に移る。
【0074】
SC4においては、予め設定されている前記基準区間燃費FE0scと前記履歴情報DThisに含まれる区間燃費FEscとに基づいて、前記選択リンクLNKsでの前記惰性走行制御の効果の高さを表す前記燃費指標値FEindが算出される。SC4の次はSC5に移る。
【0075】
SC5においては、上記選択リンクLNKsの制御実行効果フラグFLG_efctが、SC4にて算出された燃費指標値FEindに応じて設定される。その制御実行効果フラグFLG_efctは1〜5の範囲内で、その燃費指標値FEindが大きいほど大きな値に設定される。SC5の次はSC6に移る。
【0076】
SC6においては、図8のSB11と同様に、前記選択リンクLNKsの完了フラグFLG_endが0から1に切り換えられる。このSC6での完了フラグFLG_endの設定切換が完了すると、図10のSA7−1の次のステップであるSA5に移る。
【0077】
図10に戻り、表示部204に対応するSA8−1においては、例えば図9に示すように、前記制御実行頻度フラグFLG_fcyexc及び制御実行効果フラグFLG_efctの値に従って、制御実行道路画像210及び制御効果画像212を含む自車位置周辺の道路などの画像が、自車画像90と共に表示装置64に表示される。
【0078】
本実施例では次のような効果(B1)及び(B2)がある。(B1)本実施例によれば、図4に示すように、前記履歴情報DThisには、前記惰性走行制御(所定の走行制御)に関連する情報、例えばその惰性走行制御の制御実行回数NMexcおよびその惰性走行制御実行時の区間燃費FEscが含まれている。そして、図9に示すように、表示部204は、前記制御実行道路画像210の色彩の濃淡で、上記履歴情報DThisに基づいて得た上記惰性走行制御の実行頻度FCYexcの高さを、車両6の現在位置を基準とした前記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。従って、運転者の車両操作により上記惰性走行制御が実行され或いは実行されなかったかを確認することができ、運転者が車両操作により上記惰性走行制御の実行に関与したという実感を高めることが可能である。
【0079】
(B2)また、本実施例によれば、図9に示すように、表示部204は、前記制御効果画像212の色彩の濃淡で、前記履歴情報DThisに基づいて得た前記惰性走行制御の実行による効果の程度(燃費指標値FEindの大小)を、前記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。従って、上記惰性走行制御が実行されたことによる効果を運転者が確認することができる。
【実施例3】
【0080】
本実施例の機能ブロック線図は、前述の実施例1と同じ図2である。図2に示すように、本実施例の車両用制御装置である電子制御装置260は、実施例1の電子制御装置60と同様に走行制御部70と自車位置特定部72と学習部74とを備えている。しかし、上記電子制御装置60とは異なり、電子制御装置260は、表示部76ではなく表示部264を備え、上記学習部74は、表示内容決定部78ではなく表示内容決定部262を備えている。
【0081】
表示内容決定手段としての表示内容決定部262は、前述の実施例1の表示内容決定部78と比較して、主に、切換設定するフラグの種類が異なる。表示内容決定部262は、上記表示内容決定部78と同様にして、1または2以上の前記対象リンクLNKiを決定する。そして、表示内容決定部262は、その対象リンクLNKiを決定すると、その対象リンクLNKiの各々に対して種々のフラグを設ける。具体的には、上記対象リンクLNKiの各々に対して、前記完了フラグFLG_endと、直近の車両走行において前記惰性走行制御がフェールセーフ等で強制終了させられたことを示す制御強制終了フラグFLG_shtと、前記惰性走行制御の効果が所定の水準LVLef以下であったということ例えばその惰性走行制御の実行による効果が無かったということを示す制御時効果不足フラグFLG_nefとを設ける。このときの各フラグFLG_end,FLG_sht,FLG_nefの値は全て初期値である零である。表示内容決定部262は、それらのフラグFLG_end,FLG_sht,FLG_nefを設けると、上記対象リンクLNKi毎に、前記惰性走行制御に関する表示内容を決定する表示内容決定制御を行い、その表示内容決定制御が完了した対象リンクLNKiの完了フラグFLG_endを0から1に切り換える。
【0082】
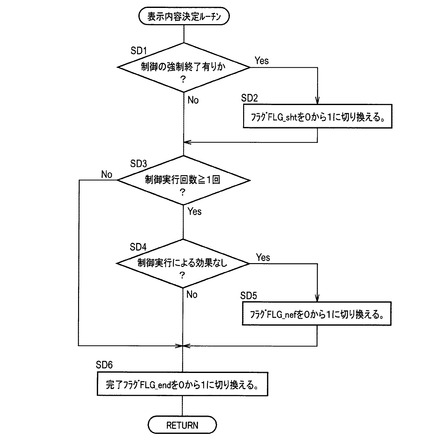
本実施例の前記表示内容決定制御について説明すると、表示内容決定部262は、全ての対象リンクLNKiについて前記惰性走行制御に関する表示内容を決定するために、先ず、完了フラグFLG_endが0に設定されている対象リンクLNKiの中から、1つの対象リンクLNKiを選択する。この選択した対象リンクLNKiを選択リンクLNKsという。これは前述の実施例1と同じである。表示内容決定部262は、その選択リンクLNKsを定めると、前記履歴情報DThisにおいて上記選択リンクLNKsのリンクIDに対応して記憶されている前記惰性走行制御の強制終了の有無が、強制終了有りになっているか否かを判断する。表示内容決定部262は、その判断の結果、上記選択リンクLNKsのリンクIDについて強制終了有りになっている場合には、その選択リンクLNKsの制御強制終了フラグFLG_shtを0から1に切り換える。
【0083】
また、表示内容決定部262は、上記選択リンクLNKsを定めた後、制御時効果不足フラグFLG_nefの切換設定を行うために、先ず、前記履歴情報DThisから、上記選択リンクLNKsのリンクIDに対応する前記惰性走行制御の制御実行回数NMexcを読み出し、その読み出した制御実行回数NMexcが1回以上か否かを判断する。その制御実行回数NMexcが0回であれば、上記惰性走行制御の実行による効果の有無を判別できないからである。
【0084】
上記制御実行回数NMexcについての判断の結果、表示内容決定部262は、前記選択リンクLNKsでの制御実行回数NMexcが1回以上である場合には、その選択リンクLNKsでの上記惰性走行制御の実行による効果が所定の水準LVLef以下であったか否かを判断する。例えば、上記惰性走行制御の実行による効果の程度は、前述の実施例2と同様に、前記燃費指標値FEindで表され、本実施例において前記基準区間燃費FE0scは、前記惰性走行制御が実行されずに車両6がリンクLnkを走行するとして実験的に得られたリンクLnk毎の燃費である。そして、上記所定の水準LVLefは、上記惰性走行制御の実行による効果がその所定の水準LVLef以下であればその効果は無いに等しいと判断できる程度の効果の水準であり、本実施例では、その所定の水準LVLefに対応し上記燃費指標値FEindと比較するための判定値として燃費指標判定値FE1indが設定されている。例えば、その燃費指標判定値FE1indは1または略1に予め実験的に設定されている。このようなことから、表示内容決定部262は、上記にように、上記選択リンクLNKsでの上記惰性走行制御の実行による効果が上記所定の水準LVLef以下であったか否かを判断するが、具体的には、上記選択リンクLNKsの燃費指標値FEindを算出し、その算出した燃費指標値FEindが所定の上記燃費指標判定値FE1ind以下であるか否かを判断する。表示内容決定部262は、その判断の結果、上記選択リンクLNKsの燃費指標値FEindが上記燃費指標判定値FE1ind以下である場合には、その選択リンクLNKsの制御時効果不足フラグFLG_nefを0から1に切り換える。
【0085】
表示内容決定部262は、このように前記惰性走行制御の強制終了の有無に応じて制御強制終了フラグFLG_shtの設定をし、且つ、前記制御実行回数NMexcが1回以上である場合に前記燃費指標値FEindに応じて制御時効果不足フラグFLG_nefの設定をした後、前記選択リンクLNKsの完了フラグFLG_endを0から1に切り換える。
【0086】
上記のように1つの選択リンクLNKsについて完了フラグFLG_endが1に切り換えられた場合には、前述の実施例1の表示内容決定部78と同様に、再び、完了フラグFLG_endが0に設定されている対象リンクLNKiの中から、1つの対象リンクLNKiが選択リンクLNKsとして選択される。そして、全ての対象リンクLNKiの完了フラグFLG_endが1になるまで、本実施例の前記表示内容決定制御が繰り返し実行される。
【0087】
表示部264は、公知のナビゲーションシステムのように自車位置と自車位置周辺の道路などを含む地図とを表示装置64に表示することは、前述の実施例1の表示部76と同じである。但し、表示内容決定部262がフラグFLG_sht,FLG_nefを設定するので、それに合わせて、表示部264は、表示内容決定部262が定めた各フラグFLG_sht,FLG_nefが示す情報を、リンクLnkを表す模様または色彩を変更することで、前記対象リンクLNKiに関連付けて表示装置64に表示する。この点が上記表示部76とは異なる。例えば、上記制御強制終了フラグFLG_shtが1であるリンクLnk(走行路)を表す道路画像と、上記制御時効果不足フラグFLG_nefが1であるリンクLnk(走行路)を表す道路画像と、それらのリンクLnk以外のリンクLnkを表す道路画像とが、相互に異なる模様又は色彩で予め定められており、表示部264は、それらの道路画像を、各フラグFLG_sht,FLG_nefの値に従って表示装置64に表示する。すなわち、表示部264は、上記制御強制終了フラグFLG_shtが1であるリンクLnkを表す道路画像を表示することで、前記惰性走行制御が強制的に終了させられたということを、車両6の現在位置を基準とした前記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。また、上記制御時効果不足フラグFLG_nefが1であるリンクLnk(走行路)を表す道路画像を表示することで、前記履歴情報DThisにおいて上記惰性走行制御が実行されその実行による効果が所定の水準LVLef以下であったということを、上記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。例えば、表示部264は、複数種類の上記道路画像を、前述の図5または図9と同様にして表示装置64に表示する。なお、上記制御強制終了フラグFLG_shtが1であり且つ上記制御時効果不足フラグFLG_nefが1であるリンクLnkもあり得るので、上記制御強制終了フラグFLG_shtが1であるリンクLnkを表す道路画像と、上記制御時効果不足フラグFLG_nefが1であるリンクLnkを表す道路画像とは、同一のリンクLnkを表す画像として、相互に重複させて表示できるようになっている。
【0088】
図12は、電子制御装置260の制御作動の要部を説明するためのフローチャートにおいて、その一部を、前述の実施例1のフローチャートを示す図7に対して異なるステップSA7−2,SA8−2を示すために抜粋したフローチャートの抜粋図である。この図12で説明される制御作動は、単独で或いは他の制御作動と並列的に実行される。図12に示すように、前記図7のフローチャートのSA7とSA8とがそれぞれ、図12のフローチャートではSA7−2とSA8−2とに置き換えられており、前記図7のフローチャートのSA1〜SA6は図12のフローチャートでも同じである。そこで、実施例1と共通するSA1〜SA6についての説明は省略する。なお、本実施例において、SA4、SA5、及びSA6は表示内容決定部262に対応する。
【0089】
前記SA6に続くSA7−2においては、図13のフローチャートが実行される。その図13は、このSA7−2で実行されるサブルーチンを示したフローチャートである。図13の全ステップは表示内容決定部262に対応する。
【0090】
図13のSD1においては、前記履歴情報DThisにおいて前記選択リンクLNKsのリンクIDに対応して記憶されている前記惰性走行制御の強制終了の有無が、強制終了有りになっているか否かが判断される。このSD1の判断が肯定された場合、すなわち、上記惰性走行制御の強制終了の有無が強制終了有りになっている場合には、SD2に移る。一方、このSD1の判断が否定された場合には、SD3に移る。
【0091】
SD2においては、前記選択リンクLNKsの制御強制終了フラグFLG_shtが0から1に切り換えられる。SD2の次はSD3に移る。
【0092】
SD3においては、前記履歴情報DThisから、上記選択リンクLNKsのリンクIDに対応する前記惰性走行制御の制御実行回数NMexcが読み出され、その読み出された制御実行回数NMexcが1回以上か否かが判断される。このSD3の判断が肯定された場合、すなわち、上記制御実行回数NMexcが1回以上である場合には、SD4に移る。一方、このSD3の判断が否定された場合には、SD6に移る。
【0093】
SD4においては、図11のSC4と同様にして上記選択リンクLNKsの前記燃費指標値FEindが算出される。そして、その燃費指標値FEindが前記燃費指標判定値FE1ind以下であるか否かが判断される。要するに、その燃費指標値FEindが表す前記惰性走行制御の実行による効果が前記所定の水準LVLef以下であったか否かが判断される。例えば、上記燃費指標値FEindが燃費指標判定値FE1ind以下であれば、上記惰性走行制御の実行による効果は無いに等しいと判断できる。このSD4の判断が肯定された場合、すなわち、上記燃費指標値FEindが上記燃費指標判定値FE1ind以下である場合には、SD5に移る。一方、このSD4の判断が否定された場合には、SD6に移る。
【0094】
SD5においては、前記選択リンクLNKsの制御時効果不足フラグFLG_nefが0から1に切り換えられる。SD5の次はSD6に移る。
【0095】
SD6においては、図8のSB11と同様に、前記選択リンクLNKsの完了フラグFLG_endが0から1に切り換えられる。このSD6での完了フラグFLG_endの設定切換が完了すると、図12のSA7−2の次のステップであるSA5に移る。
【0096】
図12に戻り、表示部264に対応するSA8−2においては、前記制御強制終了フラグFLG_sht及び制御時効果不足フラグFLG_nefの値に従って、自車位置周辺の道路などの画像が、自車画像90と共に表示装置64に表示される。
【0097】
本実施例では次のような効果(C1)及び(C2)がある。(C1)本実施例によれば、図4に示すように、前記履歴情報DThisには、前記惰性走行制御(所定の走行制御)が強制的に終了させられたリンクLnk(走行路)を示す情報が含まれている。そして、表示部264は、前記制御強制終了フラグFLG_shtが1であるリンクLnkを表す道路画像を表示することで、上記惰性走行制御が強制的に終了させられたということを、車両6の現在位置を基準とした前記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。従って、運転者が上記惰性走行制御が実行されるために必要な条件を認識し易くなる。
【0098】
(C2)また、本実施例によれば、表示部264は、前記制御時効果不足フラグFLG_nefが1であるリンクLnkを表す道路画像を表示することで、前記履歴情報DThisにおいて上記惰性走行制御が実行されその実行による効果が前記所定の水準LVLef以下であったということを、上記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。従って、運転者が上記惰性走行制御が効果的に実行されるために必要な条件を認識し易くなる。
【0099】
以上、本発明の実施例を図面に基づいて詳細に説明したが、これはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【0100】
例えば、前述の実施例1〜3において、車両6は、エンジン14と走行用電動機として機能する第2電動機MG2とを備えたハイブリッド車両であるが、その第2電動機MG2を有さずエンジン14だけで走行するエンジン車両であってもよいし、エンジン14を有さず第2電動機MG2だけで走行する電動車両(電気自動車)であっても差し支えない。
【0101】
また、前述の実施例1〜3において、本発明の所定の走行制御として前記惰性走行制御が例示されているが、その所定の走行制御は、その惰性走行制御以外の走行制御であっても差し支えない。例えば、第2電動機MG2を回生作動させて車両6を制動する回生ブレーキ制御であっても差し支えない。また、車両6が自動変速機を備えているのであれば、減速時にその自動変速機のシフトダウンを行うと共にエンジン14のフューエルカットを行う走行制御であっても差し支えない。このように所定の走行制御が異なれば、前記履歴情報DThisとして蓄えられる走行データはその所定の走行制御に応じたものになる。また、上記所定の走行制御による効果は例えば燃費の向上であるが、燃費に限らず、例えばドライバビリティの向上や耐久性悪化の抑制など他の効果であっても差し支えない。
【0102】
また、前述の実施例1〜3において、前記対象リンクLNKiを決定する際に用いられる前記所定範囲RGiは、前記規定距離によって定められているが、所定時間内に車両6が移動できる範囲で定められても差し支えない。
【0103】
また、前述の実施例2において、図9に示す制御実行道路画像210の色彩の濃淡で、前記惰性走行制御の実行頻度FCYexcの高さが表されるが、その制御実行道路画像210の幅の増減で、その実行頻度FCYexcの高さが表されても差し支えない。また、図9に示す制御効果画像212の色彩の濃淡で、上記惰性走行制御の実行による効果の程度が表されるが、その制御効果画像212の幅の増減で、その効果の程度が表されても差し支えない。
【0104】
また、前述の実施例1において、前記対象リンクLNKiの各々に対して、フラグFLG_ok,FLG_spddwn,FLG_spdup,FLG_acoffが設けられるが、それらのフラグFLG_ok,FLG_spddwn,FLG_spdup,FLG_acoffのうち何れかが設けられないことも考え得る。例えば減速時制御実行推定フラグFLG_spddwnおよび増速時制御実行推定フラグFLG_spdupが設けられておらず、図5の第2道路画像96および第3道路画像98は表示装置64に表示されなくても差し支えない。これと同様に、前述の実施例2において、フラグFLG_fcyexc,FLG_efctのうちの一方が設けられないことも考え得る。また、前述の実施例3において、フラグFLG_sht,FLG_nefのうちの一方が設けられないことも考え得る。
【0105】
また、前述の実施例2,3において、表示装置64は車両6に備えられているが、車両6に備えられている必要はなく、車両6とは別個の携帯電話やパーソナルコンピュータなどの外部機器に設けられていてもよい。そのようにしたとすれば、表示部204,264はその外部機器に設けられ、表示装置64の表示画像を定めるためのフラグFLG_fcyexc,FLG_efct,FLG_sht,FLG_nefの値は例えばLAN回線などを介して車両6からその外部機器に伝達される。
【0106】
また、前述の実施例1〜3において、表示装置64は、各フラグFLG_ok,FLG_spddwn,FLG_spdup,FLG_acoff,FLG_fcyexc,FLG_efct,FLG_sht,FLG_nefのフラグ設定値をそのフラグ設定値に応じた画像で表示するが、画像に限らず、例えば、ランプの色または点滅状況などで表示しても差し支えない。
【0107】
また、前述した複数の実施例はそれぞれ、例えば優先順位を設けるなどして、相互に組み合わせて実施することができる。例えば実施例1〜3のうち2つの実施例が相互に組み合わせられて実施されてもよいし、全部の実施例が相互に組み合わせられて実施されてもよい。例えば実施例1〜3が相互に組み合わせられるとすれば、各フラグFLG_ok,FLG_spddwn,FLG_spdup,FLG_acoff,FLG_fcyexc,FLG_efct,FLG_sht,FLG_nefに応じて表示装置64に表示される画像には、相互に区別できるような模様又は色彩がそれぞれ採用される。
【符号の説明】
【0108】
6:車両
60,200,260:電子制御装置(車両用制御装置)
64:表示装置
DThis:履歴情報
Lnk:リンク
【技術分野】
【0001】
本発明は、車両の走行で得られた履歴情報を活用して運転者の運転を支援する技術に関する。
【背景技術】
【0002】
車両走行で得られた走行データを履歴情報として蓄積する車両用制御装置が、従来から知られている。例えば、特許文献1に記載された車両用情報提示装置がそれである。その車両用情報提示装置は、具体的には、運転支援の制御不能を示す制御状態情報と制御不能地点とを互いに対応させた制御履歴情報を蓄積する。そして、上記制御履歴情報として登録されている制御不能地点が自車両周辺に存在する場合には、その制御不能地点を提示する。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2004−126888号公報
【特許文献2】特開2009−029343号公報
【特許文献3】特開2005−067483号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
前記特許文献1の車両用情報提示装置は、前記制御不能地点を提示することで、車両が上記制御不能地点に到達する前に事前にその制御不能地点を運転者に認識させることができる。しかし、車両において所定の走行制御が行われる場合に、上記特許文献1と同様に、その所定の走行制御の制御不能地点が提示されるだけでは、運転者はどのような車両操作をすればその所定の走行制御が実行され易くなるかということを把握することが困難であった。例えば、運転者が上記所定の走行制御の実行頻度を高め、その所定の走行制御のメリットを多く享受しよう考えたとしても、運転者は上記所定の走行制御の実行頻度を意識的に高めることが困難であった。なお、このような課題は未公知のことである。
【0005】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、どのような車両操作により所定の走行制御が実行され易くなるかということを把握できる情報を提示することができる車両用制御装置を提供することにある。
【課題を解決するための手段】
【0006】
上記目的を達成するための第1発明の要旨とするところは、(a)所定の走行制御が実行される車両において、その車両が走行路を走行したことで得られた走行データを履歴情報として蓄積する車両用制御装置であって、(b)前記履歴情報から現在の車両状態に基づいて、前記所定の走行制御が実行されると予測されるということを、前記車両の現在位置を基準とした所定範囲内の走行路に関連付けて表示装置に表示することを特徴とする。
【発明の効果】
【0007】
このようにすれば、運転者が現在の車両状態を変化させれば、上記所定の走行制御が実行されると予測される走行路が異なり、それが上記表示装置に表示されるので、どのような車両操作により上記所定の走行制御が実行され易くなるかということを把握することができる情報を、例えば運転者に対して提示することができる。そうなれば、例えば運転者は上記所定の走行制御によるメリットを意識的に引き出すように、車両を走行させることが可能である。
【0008】
また、第2発明の要旨とするところは、前記第1発明の車両用制御装置であって、前記履歴情報から前記現在の車両状態に基づいて、その現在の車両状態に所定の変更を加えれば前記所定の走行制御が実行されると予測されるということを、前記所定範囲内の走行路に関連付けて前記表示装置に表示することを特徴とする。このようにすれば、前記所定の走行制御が実行される区間がどのような車両操作により増やすことができるのかということが示唆されるので、前記所定の走行制御の実行の可否と車両操作との相関関係が理解され易くなる。
【0009】
また、第3発明の要旨とするところは、前記第1発明または前記第2発明の車両用制御装置であって、(a)前記履歴情報には前記所定の走行制御に関連する情報が含まれており、(b)その履歴情報に基づいて得た前記所定の走行制御の実行頻度の高さを、前記所定範囲内の走行路に関連付けて前記表示装置に表示することを特徴とする。このようにすれば、運転者の車両操作により上記所定の走行制御が実行され或いは実行されなかったかを確認することができ、運転者が車両操作により上記所定の走行制御の実行に関与したという実感を高めることが可能である。
【0010】
また、第4発明の要旨とするところは、前記第3発明の車両用制御装置であって、前記履歴情報に基づいて得た前記所定の走行制御の実行による効果の程度を、前記所定範囲内の走行路に関連付けて前記表示装置に表示することを特徴とする。このようにすれば、上記所定の走行制御が実行されたことによる効果を運転者が確認することができる。
【0011】
また、第5発明の要旨とするところは、前記第1発明から前記第4発明の何れか一の車両用制御装置であって、(a)前記履歴情報には、前記所定の走行制御が強制的に終了させられた走行路を示す情報が含まれており、(b)前記所定の走行制御が強制的に終了させられたということを、前記所定範囲内の走行路に関連付けて前記表示装置に表示することを特徴とする。このようにすれば、運転者が前記所定の走行制御が実行されるために必要な条件を認識し易くなる。
【0012】
また、第6発明の要旨とするところは、前記第1発明から前記第5発明の何れか一の車両用制御装置であって、前記履歴情報において前記所定の走行制御が実行されその実行による効果が所定の水準以下であったということを、前記所定範囲内の走行路に関連付けて前記表示装置に表示することを特徴とする。このようにすれば、運転者が前記所定の走行制御が効果的に実行されるために必要な条件を認識し易くなる。
【0013】
ここで、好適には、(a)前記車両は、エンジンと走行用電動機とを備えたハイブリッド車両であり、(b)前記所定の走行制御は、前記エンジンを停止しそのエンジンと駆動輪との間の動力伝達を遮断して惰性走行を行う惰性走行制御である。
【0014】
また、好適には、(a)前記走行路は、予め記憶されている道路地図情報を構成し道路の一区間に相当するリンクに対応しており、(b)前記車両の現在位置を基準とした前記所定範囲内のリンク毎に、前記履歴情報から前記現在の車両状態に基づいてそのリンクにおける推定車両状態を推定し、(c)その推定車両状態が前記所定の走行制御の予め定められた制御実行条件を満たす場合には、そのリンクにおいて前記所定の走行制御が実行されると予測されるものとする。
【図面の簡単な説明】
【0015】
【図1】本発明が適用されるハイブリッド車両に備えられた車両用駆動装置を説明するための骨子図である。
【図2】図1の車両用駆動装置を含むハイブリッド車両を制御するための電子制御装置に入力される信号を例示した図であると共に、その電子制御装置に備えられた制御機能の要部を説明するための機能ブロック線図である。
【図3】図2の電子制御装置がナビゲーション制御で利用する道路地図情報において、道路がどのようにして記憶されているかを説明するための図であり、(a)は実際の道路の概略図を示した図であり、(b)は上記道路地図情報の一部として記憶された上記道路を表現するノードおよびリンクを示した図である。
【図4】図1の車両用駆動装置を含むハイブリッド車両の走行データが蓄積されて得られた履歴情報を例示した図である。
【図5】図2の表示装置において自車位置周辺の道路が平面的に表示された実施例1の表示例を示す図である。
【図6】図2の表示装置において車両の進行方向にある道路が俯瞰的に表示された実施例1の表示例を示す図である。
【図7】実施例1での図2の電子制御装置の制御作動の要部、すなわち、走行データを履歴情報として蓄積し且つその履歴情報から得られる惰性走行制御に関する情報を表示する制御作動を説明するためのフローチャートである。
【図8】図7のSA7で実行されるサブルーチンを示したフローチャートである。
【図9】図2の表示装置において自車位置周辺の道路が平面的に表示された実施例2の表示例を示す図である。
【図10】実施例2での図2の電子制御装置の制御作動の要部を説明するためのフローチャートにおいて、その一部を、図7に対して異なるステップを示すために抜粋したフローチャートの抜粋図である。
【図11】図10のSA7−1で実行されるサブルーチンを示したフローチャートである。
【図12】実施例3での図2の電子制御装置の制御作動の要部を説明するためのフローチャートにおいて、その一部を、図7に対して異なるステップを示すために抜粋したフローチャートの抜粋図である。
【図13】図12のSA7−2で実行されるサブルーチンを示したフローチャートである。
【発明を実施するための形態】
【0016】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
【実施例1】
【0017】
図1は、本発明が適用されるハイブリッド車両6(以下、車両6という)に備えられた車両用駆動装置8を説明するための骨子図である。図1に示すように、車両用駆動装置8は、車体に取り付けられる非回転部材としてのトランスアクスルケース12(以下、「ケース12」という)、一般的に知られた自動車用ガソリンエンジンまたはディーゼルエンジンであるエンジン14、差動用電動機として機能する第1電動機MG1、走行用電動機として機能する第2電動機MG2、第1遊星歯車装置20、および第2遊星歯車装置22を備えている。エンジン14または第2電動機MG2の動力は、第1遊星歯車装置20および第2遊星歯車装置22のリングギヤR1,R2と一体回転する出力歯車24から、その出力歯車24を含むカウンタギヤ対32、ファイナルギヤ対34、差動歯車装置36および一対の車軸38等を順次介して一対の駆動輪40へ伝達される(図2参照)。
【0018】
第1遊星歯車装置20は、エンジン14に連結された第1キャリヤCA1と、第1電動機MG1に連結された第1サンギヤS1と、出力歯車24と一体回転する第1リングギヤR1とを備えている。また、第2遊星歯車装置22は、ケース12に連結され回転不能な第2キャリヤCA2と、第2電動機MG2に連結された第2サンギヤS2と、出力歯車24と一体回転する第2リングギヤR2とを備えている。
【0019】
第1電動機MG1及び第2電動機MG2は何れも、ジェネレータ(発電機)機能とモータ(発動機)機能との両方を備えた所謂モータジェネレータであり、例えば三相の同期電動発電機である。第1電動機MG1及び第2電動機MG2はそれぞれインバータ54(図2参照)を介して蓄電装置56に電気的に接続されており、第1電動機MG1と第2電動機MG2と蓄電装置56とは相互に電力授受可能な構成となっている。上記蓄電装置56は、例えば、鉛蓄電池などのバッテリ(二次電池)又はキャパシタなどである。
【0020】
上述のように構成された車両6は、走行用の駆動力源を、エンジン14のみ、第2電動機MG2のみ、或いは、エンジン14及び第2電動機MG2に適宜切り替えて走行することができる。すなわち、車両6は、走行用の駆動力源にエンジン14を含むエンジン走行、または、走行用の駆動力源が第2電動機MG2のみであるモータ走行をすることができる。
【0021】
また、加速操作が解除された惰性走行であるコースト走行時には、例えば、電子制御装置60は、車両状態が予め定められた制御実行条件を満たす場合に惰性走行制御を実行する。その惰性走行制御とは、第1電動機MG1を空転状態とすることでエンジン14と駆動輪40との間の動力伝達を遮断すると共にエンジン14を停止し第2電動機MG2も空転状態として惰性走行を行う走行制御である。また、本実施例において上記惰性走行制御は、本発明の所定の走行制御に対応する。
【0022】
図2は、車両6を制御するための車両用制御装置である電子制御装置60に入力される信号を例示した図であると共に、電子制御装置60に備えられた制御機能の要部を説明するための機能ブロック線図である。この電子制御装置60は、所謂マイクロコンピュータを含んで構成されている。電子制御装置60には、例えば図2に示すように、車両センサである各センサ42,46,48,50,52から各種信号が供給される。具体的には、アクセルペダルの操作量であるアクセル開度Accを表すアクセル開度センサ42からの信号、フットブレーキペダルの踏込量を表すフットブレーキセンサ46からの信号、各車輪に設けられたホイールブレーキ装置が発生させる機械的車両制動力を表すホイールブレーキセンサ48からの信号、車両6の前後方向の車両加速度を表す加速度センサ50からの信号、車速Vを表す車速センサ52からの信号、蓄電装置56の充電残量(充電状態)SOC(単位は例えばWh)を表すその蓄電装置56からの信号、車室内の空調装置であるエアコン44の作動状態(オン・オフ)を表すそのエアコン44からの信号等がそれぞれ、電子制御装置60に供給される。
【0023】
図2に示すように、電子制御装置60は公知のナビゲーション制御を実行する機能を有しており、そのナビゲーション制御を実行するために用いられる道路地図情報が記憶された地図データベース(地図DB)62を備えている。その地図データベース62はHDD(hard disk drive)などの不揮発性の記憶装置で構成されている。図3は、上記道路地図情報において、道路がどのようにして記憶されているかを説明するための図であり、図3(a)は実際の道路の概略図を示し、図3(b)は上記道路地図情報の一部として記憶された上記道路を表現するノードNDおよびリンクLnkを示している。この図3に示すように、実際の道路は、上記道路地図情報では、複数のノードNDにより分割され各ノードND間を結ぶ複数の区間としてのリンクLnkで表現されている。すなわち、上記リンクLnkは道路の一区間としての本発明の走行路に対応する。そして、各リンクLnkには、図3(b)に示すように、リンクID(道路番号)が決められている。また、各リンクID毎に、ノードNDにより定義される始点座標及び終点座標、走行路情報としての平均曲率半径と道路長と道路勾配、一般道や高速道路や一方通行などの道路種別、交差点や直線路における通過点などの各ノードNDにおける情報、などが地図データベース62に記憶されており、これらのリンクID毎の情報も上記道路地図情報に含まれている。
【0024】
図2の表示装置64は、車室内で運転者が視認し易いように設けられた液晶表示装置などの画像表示装置であり、電子制御装置60からの出力指示に従って画像を表示する。例えば、表示装置64は、電子制御装置60のナビゲーション制御における出力装置として機能しており、上記ナビゲーション制御により特定された自車位置、前記道路地図情報から抽出されたその自車位置周辺の道路地図、渋滞情報などを表示し、電子制御装置60からの出力指示に従って表示画像を逐次更新する。
【0025】
次に本実施例の制御機能の要部について、図2を用いて説明する。その図2に示すように、電子制御装置60は、走行制御手段としての走行制御部70と、自車位置特定手段としての自車位置特定部72と、学習手段としての学習部74と、表示手段としての表示部76とを備えている。
【0026】
走行制御部70は、車両状態が予め定められた制御実行条件を満たす場合に前記惰性走行制御を実行する。この惰性走行制御は、アクセルペダルが解放されたアクセルオフである場合、要するに加速操作が解除されている場合に実行される走行制御であって、車両6の燃費向上を目的として実行されるものであり、上記制御実行条件は、運転者に対して生じる違和感を抑えて車両6の燃費向上を図ることができるように予め実験的に設定されている。例えば、上記制御実行条件は、車速V、車両6の旋回半径、走行路面の勾配、および蓄電装置56の充電残量SOCなどがそれぞれ所定範囲内に入っている場合に満たされる条件であり、エアコン44のオンまたはオフに応じてその所定範囲は変更される。従って、走行制御部70が上記制御実行条件と比較する車両状態は、具体的には、その制御実行条件を定める車速V、車両6の旋回半径、走行路面の勾配、蓄電装置56の充電残量SOC、および、エアコン44の作動状態などで示される。また、走行制御部70は、上記惰性走行制御以外にも種々の走行制御を行う。例えば先の車両状態を履歴情報DThisに基づいて予測した先読み情報を学習部74から取得して、その先読み情報を利用して走行制御を行ってもよい。なお、本実施例で燃費は、単位燃料消費量当たりの走行距離で表されるもの(単位は例えばkm/L)であり、燃費の向上とはその単位燃料消費量当たりの走行距離が長くなることであり、逆に、燃費の低下(悪化)とはその単位燃料消費量当たりの走行距離が短くなることである。また、上記燃費は、車両全体としての燃料消費率(=燃料消費量/駆動輪出力)で表されても差し支えなく、そのようにしたとすれば、燃費の向上とは車両全体としての燃料消費率が小さくなることであり、逆に、燃費の低下とは車両全体としての燃料消費率が大きくなることである。
【0027】
自車位置特定部72は、GNSS(Global Navigation Satellite System)、および、車両センサにより検出される各検出情報(車両6の加速度、ヨーレート、車輪速、舵角など)を用いて、車両6の位置である自車位置、車速V、及び車両6の姿勢などを逐次算出する。そして、上記自車位置を前記道路地図情報に照合して、車両6が現在走行している走行路(リンクLnk)のリンクIDおよびその走行路での進行方向を特定する。要するに、公知のナビゲーションシステムで行われるマップマッチングを行う。
【0028】
学習部74は、自車位置特定部72から自車位置、車速V、現在走行している道路のリンクID、車両6の進行方向などの自車位置情報を自車位置特定部72から逐次取得しており、また、各センサなどから、蓄電装置56の充電残量SOC、エンジン14の燃料噴射量、エンジン回転速度Ne、アクセル開度Acc、フットブレーキペダルの踏込量などの車両情報を逐次取得している。そして、学習部74は、走行中の車両6が道路の一区間に相当する各リンクLnkを通過する毎に、すなわち、その車両6がそのリンクLnkの終点のノードNDに到達する毎に、その走行していたリンクLnkでの走行データをそのリンクLnkに関連付けて学習データベース66に記憶する。すなわち、車両6が上記リンクLnk(走行路)を走行したことで得られた上記走行データを履歴情報DThis(図4参照)として蓄積する学習制御を実行する。その学習データベース(学習DB)66は、上記走行データを記憶させるためのものであり、前記HDDなどの不揮発性の記憶装置で構成されている。上記履歴情報DThisとして蓄積される上記走行データについて図4を用いて説明する。
【0029】
図4は、上記走行データが蓄積されて得られた履歴情報DThisを例示した図である。その図4に示すように、上記履歴情報DThisでは、車速V、蓄電装置56に充電された充電量ΔSOC(単位は例えばWh)、走行回数NMrun、前記惰性走行制御の制御実行回数NMexc、前記惰性走行制御実行時の区間燃費FEsc、および上記惰性走行制御の強制終了の有無を含む走行データが、車両6の進行方向を表す往路または復路に分けて、リンクID毎に各リンクLnkに関連付けられて記憶されている。詳細に説明すると、上記履歴情報DThisの車速Vは、該当するリンクIDのリンクLnk(走行路)における車両走行毎の平均車速が平均化されて記憶されている。また、車両走行毎の上記充電量ΔSOCはリンクLnkの始点における蓄電装置56の充電残量SOCとそのリンクLnkの終点における蓄電装置56の充電残量SOCとの差分として算出することができ、上記履歴情報DThisの充電量ΔSOCは、車両走行毎の充電量ΔSOCが平均化されて記憶されている。また、上記履歴情報DThisの走行回数NMrunは、該当するリンクIDのリンクLnkを車両6が走行した回数である。また、上記履歴情報DThisの制御実行回数NMexcは、該当するリンクIDのリンクLnkを車両6が走行したときに前記惰性走行制御が正常に実行された回数である。その惰性走行制御が正常に実行されたとは、その惰性走行制御が瞬間的に実行された場合およびフェールセーフ等で強制終了させられた場合を除くという意味である。また、上記履歴情報DThisの区間燃費FEscは、上記惰性走行制御が上記正常に実行されたときの車両走行毎の区間燃費FEscが平均化されて記憶されている。また、上記履歴情報DThisの惰性走行制御の強制終了の有無は、直近の車両走行における上記強制終了の有無が記憶されている。
【0030】
学習部74は、上述した学習制御を実行することに加え、表示装置64にリンクLnk毎に表示させる画像の基になる前記惰性走行制御に関する表示内容を決定する表示内容決定部78を備えている。表示内容決定手段としての表示内容決定部78は、その表示内容を決定するために、先ず、自車位置特定部72から得られる車両6の現在位置すなわち前記自車位置に基づいて前記道路地図情報から、上記惰性走行制御に関する表示内容を決定する対象のリンクLnkである対象リンクLNKiを決定する。例えば、表示内容決定部78は、上記自車位置を基準とした所定範囲RGi内のリンクLnkを対象リンクLNKiとして決定する。詳細に言えば、上記自車位置から道のりで、上記所定範囲RGiに対応して予め定められた規定距離内に存在するリンクLnkを、表示装置64に表示されるリンクLnkであることを条件に全て対象リンクLNKiとして決定する。従って、その対象リンクLNKiは通常は複数存在する。上記規定距離は、運転者が上記自車位置の周辺であると認識できる程度に予め実験的に設定されている。
【0031】
表示内容決定部78は、上記対象リンクLNKiを決定すると、前記惰性走行制御に関する表示内容を決定する便宜上、その対象リンクLNKiの各々に対して種々のフラグを設ける。具体的には、上記対象リンクLNKiの各々に対して、上記表示内容の決定が完了したことを示す完了フラグFLG_endと、現在の車両状態で前記惰性走行制御が上記対象リンクLNKiにて実行されると推定(予測)されることを示す制御実行推定フラグFLG_okと、所定の減速をすれば前記惰性走行制御が上記対象リンクLNKiにて実行されると推定されることを示す減速時制御実行推定フラグFLG_spddwnと、所定の増速をすれば前記惰性走行制御が上記対象リンクLNKiにて実行されると推定されることを示す増速時制御実行推定フラグFLG_spdupと、エアコン44をオフにすれば前記惰性走行制御が上記対象リンクLNKiにて実行されると推定されることを示すエアコンオフ時制御実行推定フラグFLG_acoffとを設ける。このときの各フラグFLG_end,FLG_ok,FLG_spddwn,FLG_spdup,FLG_acoffの値は全て初期値である零である。表示内容決定部78は、それらのフラグFLG_end,FLG_ok,FLG_spddwn,FLG_spdup,FLG_acoffを設けると、上記対象リンクLNKi毎に、前記惰性走行制御に関する表示内容を決定する表示内容決定制御を行い、その表示内容決定制御が完了した対象リンクLNKiの完了フラグFLG_endを0から1に切り換える。従って、全ての対象リンクLNKiの完了フラグFLG_endが1になれば、上記表示内容の決定が完了したということになる。
【0032】
本実施例の前記表示内容決定制御について説明すると、表示内容決定部78は、全ての対象リンクLNKiについて前記惰性走行制御に関する表示内容を決定するために、先ず、完了フラグFLG_endが0に設定されている対象リンクLNKiの中から、1つの対象リンクLNKiを選択する。この選択した対象リンクLNKiを選択リンクLNKsという。表示内容決定部78は、その選択リンクLNKsを定めると、前記履歴情報DThisから、車速V、蓄電装置56の充電残量SOC、エアコン44のオンまたはオフ、およびアクセル開度Accなどの個々の状態パラメータで表される現在の車両状態に基づいて、車両6が上記選択リンクLNKsに至ったとしたときの車両状態、すなわち、その選択リンクLNKsにおける推定車両状態を推定する。具体的には、個々の上記状態パラメータ毎に予め定められた推定方法に従って上記選択リンクLNKsにおける状態パラメータの各々を推定することで、その選択リンクLNKsにおける推定車両状態を推定する。例えば、その推定車両状態を構成する車速Vは、前記履歴情報DThisにおいて、車両6が現在走行しているリンクLnkのリンクIDに対応する車速Vに対する選択リンクLNKsのリンクIDに対応する車速Vの比率が算出され、現在の車速Vがその算出された車速Vの比率と同じ比率で変化するものとして算出される。また、上記推定車両状態を構成する蓄電装置56の充電残量SOCは、前記履歴情報DThisにおいて、車両6が現在走行しているリンクLnkから選択リンクLNKsに至る経路を構成する全てのリンクLnkのリンクIDに対応する充電量ΔSOCが積算され、現在の充電残量SOCがその積算された充電量ΔSOC分だけ変化するものとして算出される。また、上記推定車両状態を構成するエアコン44の作動状態(オンまたはオフ)は、現在の作動状態がそのまま継続するものとして推定される。また、上記推定車両状態を構成する車両6の旋回半径は、前記道路地図情報から得られる選択リンクLNKsの平均曲率半径で車両6が旋回するものとして推定される。また、上記推定車両状態を構成するアクセル開度Accは、アクセルオフが前記惰性走行制御が実行される必須条件であるので、現在にアクセル開度Accに関係なくアクセルオフであると推定される。
【0033】
表示内容決定部78は、このようにして上記選択リンクLNKsにおける推定車両状態を推定すると、その推定車両状態の下で前記惰性走行制御が実行されるか否か、すなわち、その推定車両状態が前記制御実行条件を満たすか否かを判断する。その判断の結果、上記推定車両状態が前記制御実行条件を満たす場合には、その選択リンクLNKsの制御実行推定フラグFLG_okを0から1に切り換える。要するに、表示内容決定部78は、後述する所定の変更を現在の車両状態に加えなくてもその現在の車両状態に基づいて、前記惰性走行制御が実行されると予測される場合には、上記選択リンクLNKsの制御実行推定フラグFLG_okを0から1に切り換える。そして、その制御実行推定フラグFLG_okの設定切換後、上記選択リンクLNKsの完了フラグFLG_endを0から1に切り換える。
【0034】
その一方で、表示内容決定部78は、上記推定車両状態が前記制御実行条件を満たさない場合には、前記現在の車両状態に数種類の所定の変更を加えた場合を想定した上で、前記推定車両状態が前記制御実行条件を満たすか否かを判断する。具体的には、予め定められた減速量以内の範囲で車速Vを低下させるという所定の変更を前記現在の車両状態に加えた車両状態を想定し、その想定した車両状態に基づいて改めて推定した推定車両状態が前記制御実行条件を満たすか否かを判断する。その判断の結果、その改めて推定した推定車両状態が上記制御実行条件を満たす場合には、上記選択リンクLNKsの減速時制御実行推定フラグFLG_spddwnを0から1に切り換える。要するに、表示内容決定部78は、前記予め定められた減速量以内の範囲で車速Vを低下させるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測される場合には、上記選択リンクLNKsの減速時制御実行推定フラグFLG_spddwnを0から1に切り換える。また、表示内容決定部78は、予め定められた増速量以内の範囲で車速Vを上昇させるという所定の変更を前記現在の車両状態に加えた車両状態を想定し、その想定した車両状態に基づいて改めて推定した推定車両状態が前記制御実行条件を満たすか否かを判断する。その判断の結果、その改めて推定した推定車両状態が上記制御実行条件を満たす場合には、上記選択リンクLNKsの増速時制御実行推定フラグFLG_spdupを0から1に切り換える。要するに、表示内容決定部78は、前記予め定められた増速量以内の範囲で車速Vを上昇させるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測される場合には、上記選択リンクLNKsの増速時制御実行推定フラグFLG_spdupを0から1に切り換える。また、表示内容決定部78は、前記現在の車両状態においてエアコン44がオンであればそのエアコン44がオフにされるという所定の変更を上記現在の車両状態に加えた車両状態を想定し、その想定した車両状態に基づいて改めて推定した推定車両状態が前記制御実行条件を満たすか否かを判断する。その判断の結果、その改めて推定した推定車両状態が上記制御実行条件を満たす場合には、上記選択リンクLNKsのエアコンオフ時制御実行推定フラグFLG_acoffを0から1に切り換える。要するに、表示内容決定部78は、前記エアコン44がオフにされるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測される場合には、上記選択リンクLNKsのエアコンオフ時制御実行推定フラグFLG_acoffを0から1に切り換える。このようにして一連のフラグFLG_spddwn,FLG_spdup,FLG_acoffの切換を判断し終えた場合にも、選択リンクLNKsの完了フラグFLG_endを0から1に切り換える。なお、車両状態を想定する際に用いられる上記減速量及び上記増速量は、運転者が前記惰性走行制御を実行させるように行う僅かの車両操作に相当するように予め実験的に定められている。
【0035】
上記のように1つの選択リンクLNKsについて完了フラグFLG_endが1に切り換えられた場合には、再び、完了フラグFLG_endが0に設定されている対象リンクLNKiの中から、1つの対象リンクLNKiが選択リンクLNKsとして選択される。そして、全ての対象リンクLNKiの完了フラグFLG_endが1になるまで、本実施例の前記表示内容決定制御が繰り返し実行される。
【0036】
表示部76は、公知のナビゲーションシステムと同様にして、自車位置と自車位置周辺の道路などを含む地図とを表示装置64に表示し、その表示装置64の表示画像を逐次更新する。更に、表示内容決定部78が定めた各フラグFLG_ok,FLG_spddwn,FLG_spdup,FLG_acoffが示す情報を、リンクLnkを表す模様または色彩を変更することで、前記対象リンクLNKiに関連付けて表示装置64に表示する。その表示例が図5に示されている。図5は道路を平面的に表示した表示例である。例えば、表示装置64には、運転者によるボタン操作などよって、前記現在の車両状態に加えることを想定する前記所定の変更が、車速Vの増減、アクセル操作、またはエアコン44の作動状態変更の何れかに選択されて表示されるようになっており、図5では、上記車速Vの増減が選択されており、選択画像88がそのことを示している。そして、図5では、自車画像90は車両6を表す画像であって自車位置および進行方向を示しており、前記ノードNDが抜粋されて表示されており、実線92は前記リンクLnkの連なりである道路を示している。上記自車画像90では、その自車画像90が配設された上記実線92の長手方向に突き出た側が車両6の進行方向を示している。また、表示装置64には道路の所定区間を示す第1道路画像94、第2道路画像96、第3道路画像98が表示されており、その第1道路画像94は、前記惰性走行制御が実行されると予測される走行路を表す画像、すなわち、前記制御実行推定フラグFLG_okが1に設定された対象リンクLNKiを表す画像である。また、上記第1道路画像94に直列に連なる第2道路画像96は、前記予め定められた減速量以内の範囲で車速Vを低下させるという所定の変更を前記現在の車両状態に加えれば前記惰性走行制御が実行されると予測される走行路を表す画像、すなわち、前記減速時制御実行推定フラグFLG_spddwnが1に設定された対象リンクLNKiを表す画像である。また、上記第1道路画像94に直列に連なる第3道路画像98は、前記予め定められた増速量以内の範囲で車速Vを上昇させるという所定の変更を前記現在の車両状態に加えれば前記惰性走行制御が実行されると予測される走行路を表す画像、すなわち、前記増速時制御実行推定フラグFLG_spdupが1に設定された対象リンクLNKiを表す画像である。上記第1道路画像94、第2道路画像96、および第3道路画像98は、何れも前記実線92よりも太い帯状をしており、互いに異なる模様または色彩で表示されている。
【0037】
また、運転者のボタン操作などにより、前記現在の車両状態に加えることを想定する所定の変更が、例えばエアコン44の作動状態変更に切り換えられれば、表示部76は、前記選択画像88の表示を、「エアコン」が選択されていることを示すように切り替える。そして、前記第1道路画像94を図5と同様にそのまま表示するが、第2道路画像96および第3道路画像98は表示しない。その替わりに、表示部76は、エアコン44がオフにされるという所定の変更を前記現在の車両状態に加えれば前記惰性走行制御が実行されると予測される走行路を表す所定の帯状の道路画像、すなわち、エアコンオフ時制御実行推定フラグFLG_acoffが1に設定された対象リンクLNKiを表す所定の帯状の道路画像を表示する。
【0038】
また、上記図5は道路を平面的に表示した表示例であるが、表示部76は、図6に示すように、表示装置64に道路を俯瞰的に表示しても差し支えない。例えば、図6では、車両6が自車画像100で表されている。そして、その車両6の進路を構成する道路の画像102に重ねて、前記制御実行推定フラグFLG_okが1に設定された対象リンクLNKiを表す画像104と、前記減速時制御実行推定フラグFLG_spddwnが1に設定された対象リンクLNKiを表す画像106とが直列的に表示されている。上記画像102,104,106はそれぞれ、相互に異なる所定の模様又は色彩で表示されている。
【0039】
図7は、電子制御装置60の制御作動の要部、すなわち、前記走行データを前記履歴情報DThisとして蓄積し且つその履歴情報DThisから得られる前記惰性走行制御に関する情報を表示する制御作動を説明するためのフローチャートであり、例えば数msecから数十msec程度の極めて短いサイクルタイムで繰り返し実行される。この図7に示す制御作動は、単独で或いは他の制御作動と並列的に実行される。
【0040】
先ず、図7のステップ(以下、「ステップ」を省略する)SA1においては、車両6の位置である自車位置、車速V、及び車両6の姿勢などが逐次算出される。そして、上記自車位置が前記道路地図情報に照合されて、車両6が現在走行している走行路(リンクLnk)のリンクIDおよびその走行路での進行方向が特定される。所謂マップマッチングが行われる。SA1の次はSA2に移る。なお、SA1は自車位置特定部72に対応する。
【0041】
学習部74に対応するSA2においては、上記SA1にて算出された自車位置から、車両6が個々のリンクLnkの終点のノードNDに到達したか否かが判断される。このSA2の判断が肯定された場合、すなわち、車両6が上記リンクLnkの終点のノードNDに到達した場合には、SA3に移る。一方、このSA2の判断が否定された場合には、SA4に移る。
【0042】
学習部74に対応するSA3においては、走行していたリンクLnkでの走行データ、すなわち、SA2にて車両6が到達したと判断されたノードNDを終点とするリンクLnkでの走行データが、そのリンクLnkに関連付けて学習データベース66に記憶される。すなわち、車両6が上記リンクLnkを走行したことで得られた上記走行データが履歴情報DThisとして蓄積される。SA3の次はSA4に移る。
【0043】
表示内容決定部78に対応するSA4においては、前記対象リンクLNKiが決定される。例えば、SA1にて特定された前記自車位置を基準とした所定範囲RGi内の1又は2以上のリンクLnkが上記対象リンクLNKiとして決定される。そして、その対象リンクLNKiの各々に対して、初期値(=0)に設定された複数のフラグFLG_end,FLG_ok,FLG_spddwn,FLG_spdup,FLG_acoffが設けられる。SA4の次はSA5に移る。
【0044】
表示内容決定部78に対応するSA5においては、全ての対象リンクLNKiの完了フラグFLG_endが1になっているか否かが判断される。全ての対象リンクLNKiの完了フラグFLG_endが1になっているということは、全ての対象リンクLNKiについて前記惰性走行制御に関する表示内容を決定することが完了したということを示すからである。このSA5の判断が肯定された場合、すなわち、全ての対象リンクLNKiの完了フラグFLG_endが1になっている場合には、SA8に移る。一方、このSA5の判断が否定された場合には、SA6に移る。
【0045】
表示内容決定部78に対応するSA6においては、完了フラグFLG_endが0に設定されている対象リンクLNKiの中から、1つの対象リンクLNKiが前記選択リンクLNKsとして選択される。SA6の次はSA7に移る。
【0046】
SA7においては、図8のフローチャートが実行される。その図8は、このSA7で実行されるサブルーチンを示したフローチャートである。図8の全ステップは表示内容決定部78に対応する。
【0047】
図8のSB1においては、車速V、蓄電装置56の充電残量SOC、エアコン44のオンまたはオフ、およびアクセル開度Accなどの個々の状態パラメータで表される現在の車両状態が認識される。SB1の次はSB2に移る。
【0048】
SB2においては、図7のSA6にて選択された選択リンクLNKsにおける前記推定車両状態が、前記履歴情報DThisから、上記SB1にて認識された現在の車両状態に基づいて推定される。SB2の次はSB3に移る。
【0049】
SB3においては、上記SB2にて推定された推定車両状態の下で前記惰性走行制御が実行されるか否か、すなわち、その推定車両状態が前記制御実行条件を満たすか否かが判断される。このSB3の判断が肯定された場合、すなわち、上記推定車両状態が上記制御実行条件を満たす場合には、SB4に移る。一方、このSB3の判断が否定された場合には、SB5に移る。
【0050】
SB4においては、前記選択リンクLNKsの制御実行推定フラグFLG_okが0から1に切り換えられる。SB4の次はSB11に移る。
【0051】
SB5においては、前記予め定められた減速量以内の範囲で車速Vを低下させるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測されるか否かが判断される。このSB5の判断が肯定された場合、すなわち、前記予め定められた減速量以内の範囲で車速Vを低下させるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測される場合には、SB6に移る。一方、このSB5の判断が否定された場合には、SB7に移る。
【0052】
SB6においては、前記選択リンクLNKsの減速時制御実行推定フラグFLG_spddwnが0から1に切り換えられる。SB6の次はSB9に移る。
【0053】
SB7においては、前記予め定められた増速量以内の範囲で車速Vを上昇させるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測されるか否かが判断される。このSB7の判断が肯定された場合、すなわち、前記予め定められた増速量以内の範囲で車速Vを上昇させるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測される場合には、SB8に移る。一方、このSB7の判断が否定された場合には、SB9に移る。
【0054】
SB8においては、前記選択リンクLNKsの増速時制御実行推定フラグFLG_spdupが0から1に切り換えられる。SB8の次はSB9に移る。
【0055】
SB9においては、前記エアコン44がオフにされるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測されるか否かが判断される。このSB9の判断が肯定された場合、すなわち、前記エアコン44がオフにされるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測される場合には、SB10に移る。一方、このSB9の判断が否定された場合には、SB11に移る。
【0056】
SB10においては、前記選択リンクLNKsのエアコンオフ時制御実行推定フラグFLG_acoffが0から1に切り換えられる。SB10の次はSB11に移る。
【0057】
SB11においては、前記選択リンクLNKsの完了フラグFLG_endが0から1に切り換えられる。このSB11での完了フラグFLG_endの設定切換が完了すると、図7のSA7の次のステップであるSA5に移る。
【0058】
図7に戻り、表示部76に対応するSA8においては、例えば図5に示すように、前記制御実行推定フラグFLG_ok、減速時制御実行推定フラグFLG_spddwn、および増速時制御実行推定フラグFLG_spdupの値に従って、第1道路画像94、第2道路画像96、および第3道路画像98を含む自車位置周辺の道路などの画像が、自車画像90と共に表示装置64に表示される。また、運転者のボタン操作などにより、前記現在の車両状態に加えることを想定する所定の変更が、例えばエアコン44の作動状態変更に切り換えられれば、エアコンオフ時制御実行推定フラグFLG_acoffの値に従って、所定の道路画像が表示される。
【0059】
本実施例では次のような効果(A1)から(A3)がある。(A1)本実施例によれば、学習部74は、走行中の車両6が各リンクLnkを通過する毎に、車両6がリンクLnk(走行路)を走行したことで得られた前記走行データを履歴情報DThisとして蓄積する前記学習制御を実行する。また、表示内容決定部78は、前記履歴情報DThisから現在の車両状態に基づいて、前記惰性走行制御(所定の走行制御)が実行されると予測される場合には、上記選択リンクLNKsの制御実行推定フラグFLG_okを0から1に切り換える。そして、表示部76は、前記制御実行推定フラグFLG_okが1に設定された対象リンクLNKiを前記第1道路画像94で表示装置64に表示する。すなわち、表示部76は、前記履歴情報DThisから現在の車両状態に基づいて、前記惰性走行制御(所定の走行制御)が実行されると予測されるということを、車両6の現在位置(自車位置)を基準とした前記所定範囲RGi内の走行路(リンクLnk)に関連付けて表示装置64に表示する。従って、運転者が上記現在の車両状態を変化させれば、上記惰性走行制御が実行されると予測される走行路(リンクLnk)が異なり、それが表示装置64に表示されるので、電子制御装置60は、どのような車両操作により上記惰性走行制御が実行され易くなるかということを把握することができる情報を、例えば運転者に対して提示することができる。そうなれば、例えば運転者は上記惰性走行制御による燃費向上というメリットを意識的に引き出すように、車両6を走行させることが可能である。また、運転者に上記惰性走行制御が実行され易い走行を認識させることが可能であり、その惰性走行制御によるメリットを運転者に実感させ易くなる。
【0060】
(A2)また、本実施例によれば、表示内容決定部78は、例えば前記予め定められた減速量以内の範囲で車速Vを低下させるという所定の変更を現在の車両状態に加えれば前記惰性走行制御が実行されると予測される場合には、前記選択リンクLNKsの減速時制御実行推定フラグFLG_spddwnを0から1に切り換える。そして、表示部76は、前記減速時制御実行推定フラグFLG_spddwnが1に設定された対象リンクLNKiを前記第2道路画像96で表示装置64に表示する。すなわち、表示部76は、前記履歴情報DThisから現在の車両状態に基づいて、その現在の車両状態に上記所定の変更を加えれば前記惰性走行制御(所定の走行制御)が実行されると予測されるということを、前記所定範囲RGi内の走行路(リンクLnk)に関連付けて表示装置64に表示する。従って、前記惰性走行制御が実行される区間がどのような車両操作により増やすことができるのかということが表示装置64に示唆されるので、前記惰性走行制御の実行の可否と車両操作との相関関係が理解され易くなる。また、前記惰性走行制御を実行させる実感を運転者に与えることが可能である。
【0061】
(A3)また、本実施例によれば、表示内容決定部78は、前記所定範囲RGi内のリンクLnkである前記対象リンクLNKi毎に、前記履歴情報DThisから現在の車両状態に基づいてリンクLnk(選択リンクLNKs)における前記推定車両状態を推定する。そして、その推定車両状態が前記惰性走行制御(所定の走行制御)の前記制御実行条件を満たす場合には、その選択リンクLNKsの制御実行推定フラグFLG_okを0から1に切り換える。要するに、その選択リンクLNKsにおいて前記惰性走行制御が実行されると予測されるものとする。従って、電子制御装置60は、上記制御実行条件を用いることで、前記惰性走行制御が実行されると予測されるか否かを明確に判別することができる。
【0062】
次に、本発明の他の実施例について説明する。なお、以下の実施例の説明において、実施例相互に重複する部分については、同一の符号を付してその説明を省略する。
【実施例2】
【0063】
本実施例の機能ブロック線図は、前述の実施例1と同じ図2である。図2に示すように、本実施例の車両用制御装置である電子制御装置200は、実施例1の電子制御装置60と同様に走行制御部70と自車位置特定部72と学習部74とを備えている。しかし、上記電子制御装置60とは異なり、電子制御装置200は、表示部76ではなく表示部204を備え、上記学習部74は、表示内容決定部78ではなく表示内容決定部202を備えている。
【0064】
表示内容決定手段としての表示内容決定部202は、前述の実施例1の表示内容決定部78と比較して、主に、切換設定するフラグの種類が異なる。表示内容決定部202は、上記表示内容決定部78と同様にして、1または2以上の前記対象リンクLNKiを決定する。そして、表示内容決定部202は、その対象リンクLNKiを決定すると、その対象リンクLNKiの各々に対して種々のフラグを設ける。具体的には、上記対象リンクLNKiの各々に対して、前記完了フラグFLG_endと、前記惰性走行制御の実行頻度FCYexcが高いほど大きな値が設定される制御実行頻度フラグFLG_fcyexcと、前記惰性走行制御の効果が高いほど大きな値が設定される制御実行効果フラグFLG_efctとを設ける。このときの各フラグFLG_end,FLG_fcyexc,FLG_efctの値は全て初期値である零である。表示内容決定部202は、それらのフラグFLG_end,FLG_fcyexc,FLG_efctを設けると、上記対象リンクLNKi毎に、前記惰性走行制御に関する表示内容を決定する表示内容決定制御を行い、その表示内容決定制御が完了した対象リンクLNKiの完了フラグFLG_endを0から1に切り換える。
【0065】
本実施例の前記表示内容決定制御について説明すると、表示内容決定部202は、全ての対象リンクLNKiについて前記惰性走行制御に関する表示内容を決定するために、先ず、完了フラグFLG_endが0に設定されている対象リンクLNKiの中から、1つの対象リンクLNKiを選択する。この選択した対象リンクLNKiを選択リンクLNKsという。これは前述の実施例1と同じである。表示内容決定部202は、その選択リンクLNKsを定めると、前記履歴情報DThisから、上記選択リンクLNKsのリンクIDに対応する前記走行回数NMrunと前記惰性走行制御の制御実行回数NMexcとを読み出し、その読み出した走行回数NMrunと制御実行回数NMexcとに基づいて上記選択リンクLNKsにおける前記惰性走行制御の実行頻度FCYexc(=NMexc/NMrun)を算出する。そして、表示内容決定部202は、その算出した実行頻度FCYexcが高いほど、前記選択リンクLNKsの制御実行頻度フラグFLG_fcyexcに大きな値を設定する。上記実行頻度FCYexcはそれの算出式から判るように0〜1の値をとり得る。例えば、制御実行回数NMexcが零すなわち実行頻度FCYexcが零であれば、表示内容決定部202は、上記制御実行頻度フラグFLG_fcyexcを初期値(=0)のままにする。また、実行頻度FCYexcが零よりも大きく且つ1以下の範囲(0<FCYexc≦1)にわたって実行頻度FCYexcの低い側から順に連続的に、第1実行頻度範囲、第2実行頻度範囲、第3実行頻度範囲、第4実行頻度範囲、および第5実行頻度範囲が、制御実行頻度フラグFLG_fcyexcを設定するために予め実験的に設定されている。そして、上記算出した実行頻度FCYexcが上記第1実行頻度範囲内であれば、表示内容決定部202は、上記制御実行頻度フラグFLG_fcyexcを1に設定する。また、上記算出した実行頻度FCYexcが上記第2実行頻度範囲内であれば、表示内容決定部202は、上記制御実行頻度フラグFLG_fcyexcを2に設定する。また、上記算出した実行頻度FCYexcが上記第3実行頻度範囲内であれば、表示内容決定部202は、上記制御実行頻度フラグFLG_fcyexcを3に設定する。また、上記算出した実行頻度FCYexcが上記第4実行頻度範囲内であれば、表示内容決定部202は、上記制御実行頻度フラグFLG_fcyexcを4に設定する。また、上記算出した実行頻度FCYexcが上記第5実行頻度範囲内であれば、すなわち、その算出した実行頻度FCYexcが上記第4実行頻度範囲の上限値を超えて高ければ、表示内容決定部202は、上記制御実行頻度フラグFLG_fcyexcを5に設定する。表示内容決定部202は、このように前記実行頻度FCYexcの高さに応じて上記制御実行頻度フラグFLG_fcyexcを設定すると、その設定後の制御実行頻度フラグFLG_fcyexcが0である場合には、前記選択リンクLNKsの完了フラグFLG_endを0から1に切り換える。その一方で、表示内容決定部202は、その設定後の制御実行頻度フラグFLG_fcyexcが0ではない場合すなわち1〜5の何れかである場合には、前記選択リンクLNKsの制御実行効果フラグFLG_efctの切換設定を行う。
【0066】
具体的に、表示内容決定部202は、上記制御実行効果フラグFLG_efctの切換設定を行う際には、先ず、前記履歴情報DThisから前記惰性走行制御の効果を定量的に表す。例えば、表示内容決定部202は、前記履歴情報DThisから、前記選択リンクLNKsのリンクIDに対応する前記惰性走行制御実行時の区間燃費FEscを読み出す。その区間燃費FEscは上記惰性走行制御の効果を表すからである。そして、各リンクLnk毎に基準区間燃費FE0scが予め実験的に求められ設定されており、表示内容決定部202は、上記読み出した区間燃費FEscを、上記選択リンクLNKsのリンクIDに対応する上記基準区間燃費FE0scで除して、その選択リンクLNKsの燃費指標値FEind(=FEsc/FE0sc)を算出する。このように燃費指標値FEindを算出するのは、リンクLnkが異なれば燃費に影響する走行抵抗などが異なるので、無次元化された燃費の良否を判断できる指標値を得るためである。上記基準区間燃費FE0scは、例えば、前記惰性走行制御が実行されずに車両6がリンクLnkを走行するとして実験的に得られたリンクLnk毎の燃費である。上記燃費指標値FEindは上記惰性走行制御の効果を表す指標値であり、その燃費指標値FEindの算出方法から判るように、燃費指標値FEindは、上記惰性走行制御の効果が高いほど、すなわち、燃費が良いほど、大きい値になる。表示内容決定部202は、上記選択リンクLNKsの燃費指標値FEindを算出すると、その燃費指標値FEindが大きいほど、すなわち、上記惰性走行制御の効果が高いほど、上記選択リンクLNKsの制御実行効果フラグFLG_efctに大きな値を設定する。例えば、上記燃費指標値FEindがとり得る最大変化範囲が予め実験的に求められており、その燃費指標値FEindの最大変化範囲が5分割され、その最大変化範囲の全体にわたって燃費指標値FEindの小さい側から順に連続的に、第1燃費指標値範囲、第2燃費指標値範囲、第3燃費指標値範囲、第4燃費指標値範囲、および第5燃費指標値範囲が、上記制御実行効果フラグFLG_efctを設定するために予め実験的に設定されている。そして、上記燃費指標値FEindが上記第1燃費指標値範囲内であれば、表示内容決定部202は、上記制御実行効果フラグFLG_efctを1に設定する。また、上記燃費指標値FEindが上記第2燃費指標値範囲内であれば、表示内容決定部202は、上記制御実行効果フラグFLG_efctを2に設定する。また、上記燃費指標値FEindが上記第3燃費指標値範囲内であれば、表示内容決定部202は、上記制御実行効果フラグFLG_efctを3に設定する。また、上記燃費指標値FEindが上記第4燃費指標値範囲内であれば、表示内容決定部202は、上記制御実行効果フラグFLG_efctを4に設定する。また、上記燃費指標値FEindが上記第5燃費指標値範囲内であれば、すなわち、その燃費指標値FEindが上記第4燃費指標値範囲の上限値を超えて大きければ、表示内容決定部202は、上記制御実行効果フラグFLG_efctを5に設定する。表示内容決定部202は、このように上記燃費指標値FEindに応じて上記制御実行効果フラグFLG_efctを設定した後、前記選択リンクLNKsの完了フラグFLG_endを0から1に切り換える。
【0067】
上記のように1つの選択リンクLNKsについて完了フラグFLG_endが1に切り換えられた場合には、前述の実施例1の表示内容決定部78と同様に、再び、完了フラグFLG_endが0に設定されている対象リンクLNKiの中から、1つの対象リンクLNKiが選択リンクLNKsとして選択される。そして、全ての対象リンクLNKiの完了フラグFLG_endが1になるまで、本実施例の前記表示内容決定制御が繰り返し実行される。
【0068】
表示部204は、公知のナビゲーションシステムのように自車位置と自車位置周辺の道路などを含む地図とを表示装置64に表示することは、前述の実施例1の表示部76と同じである。但し、表示内容決定部202がフラグFLG_fcyexc,FLG_efctを設定するので、それに合わせて、表示部204は、表示内容決定部202が定めた各フラグFLG_fcyexc,FLG_efctが示す情報を、リンクLnkを表す模様または色彩を変更することで、前記対象リンクLNKiに関連付けて表示装置64に表示する。この点が上記表示部76とは異なる。上記各フラグFLG_fcyexc,FLG_efctが示す情報が表示部204により表示装置64に表示された表示例が図9に示されている。図9は道路を平面的に表示した表示例である。例えば、図9では、前記図5と同様に、自車画像90が自車位置および進行方向を示しており、前記ノードNDが抜粋されて表示されており、実線92は前記リンクLnkの連なりである道路を示している。また、表示装置64には道路の所定区間を示す制御実行道路画像210と制御効果画像212とが表示されている。具体的に、その制御実行道路画像210と制御効果画像212とは互いに同じリンクLnkに対応して表示される画像、詳細には、前記制御実行頻度フラグFLG_fcyexcが1以上に設定された対象リンクLNKiに対応して重畳的に表示される画像であり、制御実行道路画像210は、点状の図形が上記実線92に沿って連なった点線画像である。そして、表示部204は、上記制御実行道路画像210の色彩を、その制御実行道路画像210に対応するリンクLnkの上記制御実行頻度フラグFLG_fcyexcの値が大きいほど濃く表示する。すなわち、上記制御実行道路画像210の色彩の濃淡で、前記履歴情報DThisに基づいて得た前記惰性走行制御の実行頻度FCYexcの高さを、車両6の現在位置を基準とした前記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。また、前記制御効果画像212は、前記制御実行道路画像210に重なるその制御実行道路画像210よりも幅広の帯状の画像である。そして、表示部204は、上記制御効果画像212を制御実行道路画像210と容易に区別できるように互いに異なる模様又は色彩で表示し、その制御効果画像212の色彩を、その制御効果画像212に対応するリンクLnkの上記制御実行効果フラグFLG_efctの値が大きいほど濃く表示する。すなわち、上記制御効果画像212の色彩の濃淡で、前記履歴情報DThisに基づいて得た前記惰性走行制御の実行による効果の程度(燃費指標値FEindの大小)を、前記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。
【0069】
図10は、電子制御装置200の制御作動の要部を説明するためのフローチャートにおいて、その一部を、前述の実施例1のフローチャートを示す図7に対して異なるステップSA7−1,SA8−1を示すために抜粋したフローチャートの抜粋図である。この図10で説明される制御作動は、単独で或いは他の制御作動と並列的に実行される。図10に示すように、前記図7のフローチャートのSA7とSA8とがそれぞれ、図10のフローチャートではSA7−1とSA8−1とに置き換えられており、前記図7のフローチャートのSA1〜SA6は図10のフローチャートでも同じである。そこで、実施例1と共通するSA1〜SA6についての説明は省略する。なお、本実施例において、SA4、SA5、及びSA6は表示内容決定部202に対応する。
【0070】
前記SA6に続くSA7−1においては、図11のフローチャートが実行される。その図11は、このSA7−1で実行されるサブルーチンを示したフローチャートである。図11の全ステップは表示内容決定部202に対応する。
【0071】
図11のSC1においては、前記履歴情報DThisから、図10のSA6にて選択された前記選択リンクLNKsのリンクIDに対応する前記走行回数NMrunと前記惰性走行制御の制御実行回数NMexcとが読み出され、その選択リンクLNKsにおける前記惰性走行制御の実行頻度FCYexcが、その読み出された走行回数NMrunと制御実行回数NMexcとに基づいて算出される。SC1の次はSC2に移る。
【0072】
SC2においては、上記選択リンクLNKsの制御実行頻度フラグFLG_fcyexcが、SC1にて算出された実行頻度FCYexcに応じて設定される。その制御実行頻度フラグFLG_fcyexcはその実行頻度FCYexcが高いほど大きな値に設定され、例えば、制御実行回数NMexcが零すなわち実行頻度FCYexcが零であれば初期値(=0)のままにされる。SC2の次はSC3に移る。
【0073】
SC3においては、上記制御実行頻度フラグFLG_fcyexcが零であるか否かが判断される。このSC3の判断が肯定された場合、すなわち、上記制御実行頻度フラグFLG_fcyexcが零である場合には、SC6に移る。一方、このSC3の判断が否定された場合には、SC4に移る。
【0074】
SC4においては、予め設定されている前記基準区間燃費FE0scと前記履歴情報DThisに含まれる区間燃費FEscとに基づいて、前記選択リンクLNKsでの前記惰性走行制御の効果の高さを表す前記燃費指標値FEindが算出される。SC4の次はSC5に移る。
【0075】
SC5においては、上記選択リンクLNKsの制御実行効果フラグFLG_efctが、SC4にて算出された燃費指標値FEindに応じて設定される。その制御実行効果フラグFLG_efctは1〜5の範囲内で、その燃費指標値FEindが大きいほど大きな値に設定される。SC5の次はSC6に移る。
【0076】
SC6においては、図8のSB11と同様に、前記選択リンクLNKsの完了フラグFLG_endが0から1に切り換えられる。このSC6での完了フラグFLG_endの設定切換が完了すると、図10のSA7−1の次のステップであるSA5に移る。
【0077】
図10に戻り、表示部204に対応するSA8−1においては、例えば図9に示すように、前記制御実行頻度フラグFLG_fcyexc及び制御実行効果フラグFLG_efctの値に従って、制御実行道路画像210及び制御効果画像212を含む自車位置周辺の道路などの画像が、自車画像90と共に表示装置64に表示される。
【0078】
本実施例では次のような効果(B1)及び(B2)がある。(B1)本実施例によれば、図4に示すように、前記履歴情報DThisには、前記惰性走行制御(所定の走行制御)に関連する情報、例えばその惰性走行制御の制御実行回数NMexcおよびその惰性走行制御実行時の区間燃費FEscが含まれている。そして、図9に示すように、表示部204は、前記制御実行道路画像210の色彩の濃淡で、上記履歴情報DThisに基づいて得た上記惰性走行制御の実行頻度FCYexcの高さを、車両6の現在位置を基準とした前記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。従って、運転者の車両操作により上記惰性走行制御が実行され或いは実行されなかったかを確認することができ、運転者が車両操作により上記惰性走行制御の実行に関与したという実感を高めることが可能である。
【0079】
(B2)また、本実施例によれば、図9に示すように、表示部204は、前記制御効果画像212の色彩の濃淡で、前記履歴情報DThisに基づいて得た前記惰性走行制御の実行による効果の程度(燃費指標値FEindの大小)を、前記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。従って、上記惰性走行制御が実行されたことによる効果を運転者が確認することができる。
【実施例3】
【0080】
本実施例の機能ブロック線図は、前述の実施例1と同じ図2である。図2に示すように、本実施例の車両用制御装置である電子制御装置260は、実施例1の電子制御装置60と同様に走行制御部70と自車位置特定部72と学習部74とを備えている。しかし、上記電子制御装置60とは異なり、電子制御装置260は、表示部76ではなく表示部264を備え、上記学習部74は、表示内容決定部78ではなく表示内容決定部262を備えている。
【0081】
表示内容決定手段としての表示内容決定部262は、前述の実施例1の表示内容決定部78と比較して、主に、切換設定するフラグの種類が異なる。表示内容決定部262は、上記表示内容決定部78と同様にして、1または2以上の前記対象リンクLNKiを決定する。そして、表示内容決定部262は、その対象リンクLNKiを決定すると、その対象リンクLNKiの各々に対して種々のフラグを設ける。具体的には、上記対象リンクLNKiの各々に対して、前記完了フラグFLG_endと、直近の車両走行において前記惰性走行制御がフェールセーフ等で強制終了させられたことを示す制御強制終了フラグFLG_shtと、前記惰性走行制御の効果が所定の水準LVLef以下であったということ例えばその惰性走行制御の実行による効果が無かったということを示す制御時効果不足フラグFLG_nefとを設ける。このときの各フラグFLG_end,FLG_sht,FLG_nefの値は全て初期値である零である。表示内容決定部262は、それらのフラグFLG_end,FLG_sht,FLG_nefを設けると、上記対象リンクLNKi毎に、前記惰性走行制御に関する表示内容を決定する表示内容決定制御を行い、その表示内容決定制御が完了した対象リンクLNKiの完了フラグFLG_endを0から1に切り換える。
【0082】
本実施例の前記表示内容決定制御について説明すると、表示内容決定部262は、全ての対象リンクLNKiについて前記惰性走行制御に関する表示内容を決定するために、先ず、完了フラグFLG_endが0に設定されている対象リンクLNKiの中から、1つの対象リンクLNKiを選択する。この選択した対象リンクLNKiを選択リンクLNKsという。これは前述の実施例1と同じである。表示内容決定部262は、その選択リンクLNKsを定めると、前記履歴情報DThisにおいて上記選択リンクLNKsのリンクIDに対応して記憶されている前記惰性走行制御の強制終了の有無が、強制終了有りになっているか否かを判断する。表示内容決定部262は、その判断の結果、上記選択リンクLNKsのリンクIDについて強制終了有りになっている場合には、その選択リンクLNKsの制御強制終了フラグFLG_shtを0から1に切り換える。
【0083】
また、表示内容決定部262は、上記選択リンクLNKsを定めた後、制御時効果不足フラグFLG_nefの切換設定を行うために、先ず、前記履歴情報DThisから、上記選択リンクLNKsのリンクIDに対応する前記惰性走行制御の制御実行回数NMexcを読み出し、その読み出した制御実行回数NMexcが1回以上か否かを判断する。その制御実行回数NMexcが0回であれば、上記惰性走行制御の実行による効果の有無を判別できないからである。
【0084】
上記制御実行回数NMexcについての判断の結果、表示内容決定部262は、前記選択リンクLNKsでの制御実行回数NMexcが1回以上である場合には、その選択リンクLNKsでの上記惰性走行制御の実行による効果が所定の水準LVLef以下であったか否かを判断する。例えば、上記惰性走行制御の実行による効果の程度は、前述の実施例2と同様に、前記燃費指標値FEindで表され、本実施例において前記基準区間燃費FE0scは、前記惰性走行制御が実行されずに車両6がリンクLnkを走行するとして実験的に得られたリンクLnk毎の燃費である。そして、上記所定の水準LVLefは、上記惰性走行制御の実行による効果がその所定の水準LVLef以下であればその効果は無いに等しいと判断できる程度の効果の水準であり、本実施例では、その所定の水準LVLefに対応し上記燃費指標値FEindと比較するための判定値として燃費指標判定値FE1indが設定されている。例えば、その燃費指標判定値FE1indは1または略1に予め実験的に設定されている。このようなことから、表示内容決定部262は、上記にように、上記選択リンクLNKsでの上記惰性走行制御の実行による効果が上記所定の水準LVLef以下であったか否かを判断するが、具体的には、上記選択リンクLNKsの燃費指標値FEindを算出し、その算出した燃費指標値FEindが所定の上記燃費指標判定値FE1ind以下であるか否かを判断する。表示内容決定部262は、その判断の結果、上記選択リンクLNKsの燃費指標値FEindが上記燃費指標判定値FE1ind以下である場合には、その選択リンクLNKsの制御時効果不足フラグFLG_nefを0から1に切り換える。
【0085】
表示内容決定部262は、このように前記惰性走行制御の強制終了の有無に応じて制御強制終了フラグFLG_shtの設定をし、且つ、前記制御実行回数NMexcが1回以上である場合に前記燃費指標値FEindに応じて制御時効果不足フラグFLG_nefの設定をした後、前記選択リンクLNKsの完了フラグFLG_endを0から1に切り換える。
【0086】
上記のように1つの選択リンクLNKsについて完了フラグFLG_endが1に切り換えられた場合には、前述の実施例1の表示内容決定部78と同様に、再び、完了フラグFLG_endが0に設定されている対象リンクLNKiの中から、1つの対象リンクLNKiが選択リンクLNKsとして選択される。そして、全ての対象リンクLNKiの完了フラグFLG_endが1になるまで、本実施例の前記表示内容決定制御が繰り返し実行される。
【0087】
表示部264は、公知のナビゲーションシステムのように自車位置と自車位置周辺の道路などを含む地図とを表示装置64に表示することは、前述の実施例1の表示部76と同じである。但し、表示内容決定部262がフラグFLG_sht,FLG_nefを設定するので、それに合わせて、表示部264は、表示内容決定部262が定めた各フラグFLG_sht,FLG_nefが示す情報を、リンクLnkを表す模様または色彩を変更することで、前記対象リンクLNKiに関連付けて表示装置64に表示する。この点が上記表示部76とは異なる。例えば、上記制御強制終了フラグFLG_shtが1であるリンクLnk(走行路)を表す道路画像と、上記制御時効果不足フラグFLG_nefが1であるリンクLnk(走行路)を表す道路画像と、それらのリンクLnk以外のリンクLnkを表す道路画像とが、相互に異なる模様又は色彩で予め定められており、表示部264は、それらの道路画像を、各フラグFLG_sht,FLG_nefの値に従って表示装置64に表示する。すなわち、表示部264は、上記制御強制終了フラグFLG_shtが1であるリンクLnkを表す道路画像を表示することで、前記惰性走行制御が強制的に終了させられたということを、車両6の現在位置を基準とした前記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。また、上記制御時効果不足フラグFLG_nefが1であるリンクLnk(走行路)を表す道路画像を表示することで、前記履歴情報DThisにおいて上記惰性走行制御が実行されその実行による効果が所定の水準LVLef以下であったということを、上記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。例えば、表示部264は、複数種類の上記道路画像を、前述の図5または図9と同様にして表示装置64に表示する。なお、上記制御強制終了フラグFLG_shtが1であり且つ上記制御時効果不足フラグFLG_nefが1であるリンクLnkもあり得るので、上記制御強制終了フラグFLG_shtが1であるリンクLnkを表す道路画像と、上記制御時効果不足フラグFLG_nefが1であるリンクLnkを表す道路画像とは、同一のリンクLnkを表す画像として、相互に重複させて表示できるようになっている。
【0088】
図12は、電子制御装置260の制御作動の要部を説明するためのフローチャートにおいて、その一部を、前述の実施例1のフローチャートを示す図7に対して異なるステップSA7−2,SA8−2を示すために抜粋したフローチャートの抜粋図である。この図12で説明される制御作動は、単独で或いは他の制御作動と並列的に実行される。図12に示すように、前記図7のフローチャートのSA7とSA8とがそれぞれ、図12のフローチャートではSA7−2とSA8−2とに置き換えられており、前記図7のフローチャートのSA1〜SA6は図12のフローチャートでも同じである。そこで、実施例1と共通するSA1〜SA6についての説明は省略する。なお、本実施例において、SA4、SA5、及びSA6は表示内容決定部262に対応する。
【0089】
前記SA6に続くSA7−2においては、図13のフローチャートが実行される。その図13は、このSA7−2で実行されるサブルーチンを示したフローチャートである。図13の全ステップは表示内容決定部262に対応する。
【0090】
図13のSD1においては、前記履歴情報DThisにおいて前記選択リンクLNKsのリンクIDに対応して記憶されている前記惰性走行制御の強制終了の有無が、強制終了有りになっているか否かが判断される。このSD1の判断が肯定された場合、すなわち、上記惰性走行制御の強制終了の有無が強制終了有りになっている場合には、SD2に移る。一方、このSD1の判断が否定された場合には、SD3に移る。
【0091】
SD2においては、前記選択リンクLNKsの制御強制終了フラグFLG_shtが0から1に切り換えられる。SD2の次はSD3に移る。
【0092】
SD3においては、前記履歴情報DThisから、上記選択リンクLNKsのリンクIDに対応する前記惰性走行制御の制御実行回数NMexcが読み出され、その読み出された制御実行回数NMexcが1回以上か否かが判断される。このSD3の判断が肯定された場合、すなわち、上記制御実行回数NMexcが1回以上である場合には、SD4に移る。一方、このSD3の判断が否定された場合には、SD6に移る。
【0093】
SD4においては、図11のSC4と同様にして上記選択リンクLNKsの前記燃費指標値FEindが算出される。そして、その燃費指標値FEindが前記燃費指標判定値FE1ind以下であるか否かが判断される。要するに、その燃費指標値FEindが表す前記惰性走行制御の実行による効果が前記所定の水準LVLef以下であったか否かが判断される。例えば、上記燃費指標値FEindが燃費指標判定値FE1ind以下であれば、上記惰性走行制御の実行による効果は無いに等しいと判断できる。このSD4の判断が肯定された場合、すなわち、上記燃費指標値FEindが上記燃費指標判定値FE1ind以下である場合には、SD5に移る。一方、このSD4の判断が否定された場合には、SD6に移る。
【0094】
SD5においては、前記選択リンクLNKsの制御時効果不足フラグFLG_nefが0から1に切り換えられる。SD5の次はSD6に移る。
【0095】
SD6においては、図8のSB11と同様に、前記選択リンクLNKsの完了フラグFLG_endが0から1に切り換えられる。このSD6での完了フラグFLG_endの設定切換が完了すると、図12のSA7−2の次のステップであるSA5に移る。
【0096】
図12に戻り、表示部264に対応するSA8−2においては、前記制御強制終了フラグFLG_sht及び制御時効果不足フラグFLG_nefの値に従って、自車位置周辺の道路などの画像が、自車画像90と共に表示装置64に表示される。
【0097】
本実施例では次のような効果(C1)及び(C2)がある。(C1)本実施例によれば、図4に示すように、前記履歴情報DThisには、前記惰性走行制御(所定の走行制御)が強制的に終了させられたリンクLnk(走行路)を示す情報が含まれている。そして、表示部264は、前記制御強制終了フラグFLG_shtが1であるリンクLnkを表す道路画像を表示することで、上記惰性走行制御が強制的に終了させられたということを、車両6の現在位置を基準とした前記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。従って、運転者が上記惰性走行制御が実行されるために必要な条件を認識し易くなる。
【0098】
(C2)また、本実施例によれば、表示部264は、前記制御時効果不足フラグFLG_nefが1であるリンクLnkを表す道路画像を表示することで、前記履歴情報DThisにおいて上記惰性走行制御が実行されその実行による効果が前記所定の水準LVLef以下であったということを、上記所定範囲RGi内のリンクLnk(走行路)に関連付けて表示装置64に表示する。従って、運転者が上記惰性走行制御が効果的に実行されるために必要な条件を認識し易くなる。
【0099】
以上、本発明の実施例を図面に基づいて詳細に説明したが、これはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【0100】
例えば、前述の実施例1〜3において、車両6は、エンジン14と走行用電動機として機能する第2電動機MG2とを備えたハイブリッド車両であるが、その第2電動機MG2を有さずエンジン14だけで走行するエンジン車両であってもよいし、エンジン14を有さず第2電動機MG2だけで走行する電動車両(電気自動車)であっても差し支えない。
【0101】
また、前述の実施例1〜3において、本発明の所定の走行制御として前記惰性走行制御が例示されているが、その所定の走行制御は、その惰性走行制御以外の走行制御であっても差し支えない。例えば、第2電動機MG2を回生作動させて車両6を制動する回生ブレーキ制御であっても差し支えない。また、車両6が自動変速機を備えているのであれば、減速時にその自動変速機のシフトダウンを行うと共にエンジン14のフューエルカットを行う走行制御であっても差し支えない。このように所定の走行制御が異なれば、前記履歴情報DThisとして蓄えられる走行データはその所定の走行制御に応じたものになる。また、上記所定の走行制御による効果は例えば燃費の向上であるが、燃費に限らず、例えばドライバビリティの向上や耐久性悪化の抑制など他の効果であっても差し支えない。
【0102】
また、前述の実施例1〜3において、前記対象リンクLNKiを決定する際に用いられる前記所定範囲RGiは、前記規定距離によって定められているが、所定時間内に車両6が移動できる範囲で定められても差し支えない。
【0103】
また、前述の実施例2において、図9に示す制御実行道路画像210の色彩の濃淡で、前記惰性走行制御の実行頻度FCYexcの高さが表されるが、その制御実行道路画像210の幅の増減で、その実行頻度FCYexcの高さが表されても差し支えない。また、図9に示す制御効果画像212の色彩の濃淡で、上記惰性走行制御の実行による効果の程度が表されるが、その制御効果画像212の幅の増減で、その効果の程度が表されても差し支えない。
【0104】
また、前述の実施例1において、前記対象リンクLNKiの各々に対して、フラグFLG_ok,FLG_spddwn,FLG_spdup,FLG_acoffが設けられるが、それらのフラグFLG_ok,FLG_spddwn,FLG_spdup,FLG_acoffのうち何れかが設けられないことも考え得る。例えば減速時制御実行推定フラグFLG_spddwnおよび増速時制御実行推定フラグFLG_spdupが設けられておらず、図5の第2道路画像96および第3道路画像98は表示装置64に表示されなくても差し支えない。これと同様に、前述の実施例2において、フラグFLG_fcyexc,FLG_efctのうちの一方が設けられないことも考え得る。また、前述の実施例3において、フラグFLG_sht,FLG_nefのうちの一方が設けられないことも考え得る。
【0105】
また、前述の実施例2,3において、表示装置64は車両6に備えられているが、車両6に備えられている必要はなく、車両6とは別個の携帯電話やパーソナルコンピュータなどの外部機器に設けられていてもよい。そのようにしたとすれば、表示部204,264はその外部機器に設けられ、表示装置64の表示画像を定めるためのフラグFLG_fcyexc,FLG_efct,FLG_sht,FLG_nefの値は例えばLAN回線などを介して車両6からその外部機器に伝達される。
【0106】
また、前述の実施例1〜3において、表示装置64は、各フラグFLG_ok,FLG_spddwn,FLG_spdup,FLG_acoff,FLG_fcyexc,FLG_efct,FLG_sht,FLG_nefのフラグ設定値をそのフラグ設定値に応じた画像で表示するが、画像に限らず、例えば、ランプの色または点滅状況などで表示しても差し支えない。
【0107】
また、前述した複数の実施例はそれぞれ、例えば優先順位を設けるなどして、相互に組み合わせて実施することができる。例えば実施例1〜3のうち2つの実施例が相互に組み合わせられて実施されてもよいし、全部の実施例が相互に組み合わせられて実施されてもよい。例えば実施例1〜3が相互に組み合わせられるとすれば、各フラグFLG_ok,FLG_spddwn,FLG_spdup,FLG_acoff,FLG_fcyexc,FLG_efct,FLG_sht,FLG_nefに応じて表示装置64に表示される画像には、相互に区別できるような模様又は色彩がそれぞれ採用される。
【符号の説明】
【0108】
6:車両
60,200,260:電子制御装置(車両用制御装置)
64:表示装置
DThis:履歴情報
Lnk:リンク
【特許請求の範囲】
【請求項1】
所定の走行制御が実行される車両において、該車両が走行路を走行したことで得られた走行データを履歴情報として蓄積する車両用制御装置であって、
前記履歴情報から現在の車両状態に基づいて、前記所定の走行制御が実行されると予測されるということを、前記車両の現在位置を基準とした所定範囲内の走行路に関連付けて表示装置に表示する
ことを特徴とする車両用制御装置。
【請求項2】
前記履歴情報から前記現在の車両状態に基づいて、該現在の車両状態に所定の変更を加えれば前記所定の走行制御が実行されると予測されるということを、前記所定範囲内の走行路に関連付けて前記表示装置に表示する
ことを特徴とする請求項1に記載の車両用制御装置。
【請求項3】
前記履歴情報には前記所定の走行制御に関連する情報が含まれており、
該履歴情報に基づいて得た前記所定の走行制御の実行頻度の高さを、前記所定範囲内の走行路に関連付けて前記表示装置に表示する
ことを特徴とする請求項1又は2に記載の車両用制御装置。
【請求項4】
前記履歴情報に基づいて得た前記所定の走行制御の実行による効果の程度を、前記所定範囲内の走行路に関連付けて前記表示装置に表示する
ことを特徴とする請求項3に記載の車両用制御装置。
【請求項5】
前記履歴情報には、前記所定の走行制御が強制的に終了させられた走行路を示す情報が含まれており、
前記所定の走行制御が強制的に終了させられたということを、前記所定範囲内の走行路に関連付けて前記表示装置に表示する
ことを特徴とする請求項1から4の何れか1項に記載の車両用制御装置。
【請求項6】
前記履歴情報において前記所定の走行制御が実行され該実行による効果が所定の水準以下であったということを、前記所定範囲内の走行路に関連付けて前記表示装置に表示する
ことを特徴とする請求項1から5の何れか1項に記載の車両用制御装置。
【請求項1】
所定の走行制御が実行される車両において、該車両が走行路を走行したことで得られた走行データを履歴情報として蓄積する車両用制御装置であって、
前記履歴情報から現在の車両状態に基づいて、前記所定の走行制御が実行されると予測されるということを、前記車両の現在位置を基準とした所定範囲内の走行路に関連付けて表示装置に表示する
ことを特徴とする車両用制御装置。
【請求項2】
前記履歴情報から前記現在の車両状態に基づいて、該現在の車両状態に所定の変更を加えれば前記所定の走行制御が実行されると予測されるということを、前記所定範囲内の走行路に関連付けて前記表示装置に表示する
ことを特徴とする請求項1に記載の車両用制御装置。
【請求項3】
前記履歴情報には前記所定の走行制御に関連する情報が含まれており、
該履歴情報に基づいて得た前記所定の走行制御の実行頻度の高さを、前記所定範囲内の走行路に関連付けて前記表示装置に表示する
ことを特徴とする請求項1又は2に記載の車両用制御装置。
【請求項4】
前記履歴情報に基づいて得た前記所定の走行制御の実行による効果の程度を、前記所定範囲内の走行路に関連付けて前記表示装置に表示する
ことを特徴とする請求項3に記載の車両用制御装置。
【請求項5】
前記履歴情報には、前記所定の走行制御が強制的に終了させられた走行路を示す情報が含まれており、
前記所定の走行制御が強制的に終了させられたということを、前記所定範囲内の走行路に関連付けて前記表示装置に表示する
ことを特徴とする請求項1から4の何れか1項に記載の車両用制御装置。
【請求項6】
前記履歴情報において前記所定の走行制御が実行され該実行による効果が所定の水準以下であったということを、前記所定範囲内の走行路に関連付けて前記表示装置に表示する
ことを特徴とする請求項1から5の何れか1項に記載の車両用制御装置。
【図1】


【図2】

【図3】
【図4】

【図5】
【図6】

【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【公開番号】特開2013−24679(P2013−24679A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−158755(P2011−158755)
【出願日】平成23年7月20日(2011.7.20)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月20日(2011.7.20)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]