
車両用制御装置
【課題】原動機の断続運転による低燃費走行中にその断続運転に起因する比較的長周期の振動や騒音を有効に低減できる車両用制御装置を提供する。
【解決手段】原動機が少なくとも電動機で構成されている車両に装備され、要求出力が所定変動幅内に保持されていることを条件に、原動機の断続運転を実行して、車両の加速走行と惰性走行とを交互に実行させる車両用制御装置であって、断続運転のための原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域内に入るか否かを判定する共振判定部(ステップS14の機能)と、その判定の結果、出力変動の周波数が共振周波数域内に入ることを条件に、特定の振動の周波数が車両の共振周波数域から外れるように断続運転の条件を通常とは異なる条件に変更する断続運転条件変更部(ステップS16の機能)と、を備えている。
【解決手段】原動機が少なくとも電動機で構成されている車両に装備され、要求出力が所定変動幅内に保持されていることを条件に、原動機の断続運転を実行して、車両の加速走行と惰性走行とを交互に実行させる車両用制御装置であって、断続運転のための原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域内に入るか否かを判定する共振判定部(ステップS14の機能)と、その判定の結果、出力変動の周波数が共振周波数域内に入ることを条件に、特定の振動の周波数が車両の共振周波数域から外れるように断続運転の条件を通常とは異なる条件に変更する断続運転条件変更部(ステップS16の機能)と、を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行駆動用の原動機(駆動力源)として少なくとも電動機を備えた車両に装備される車両用制御装置に関し、特にその原動機のエネルギ消費量を抑える制御を実行する車両用制御装置に関する。
【背景技術】
【0002】
近時、走行駆動用の原動機として少なくとも電動機を備えた車両、例えば電動機を搭載した電気自動車や、電動機と内燃機関を搭載したハイブリッド電気自動車(以下、ハイブリッド車両という)が、普及して来ている。また、ハイブリッド車両には、発電機と電動機を搭載したものや、発電可能な電動機(発電電動機)を登載したものがある。
【0003】
このような車両においては、アクセルペダル等による運転者の要求パワー(要求出力)に応じて、さらには安全性や運転負荷の軽減、エネルギ消費量の低減等のために付加される各種制御装置からの要求に従って、電動機の出力、発電機の発電量、内燃機関の出力等を制御して、走行駆動車輪側への伝達動力(駆動トルクおよび回転数)を変化させるようになっている。
【0004】
従来のこの種の車両用制御装置としては、所定条件下(例えば、アクセルペダルからの加速要求がされないアクセルOFF状態下)で、内燃機関を断続運転させ、設定車速域内で内燃機関による走行駆動で車両を加速する加速走行と内燃機関による走行駆動を停止して車両を惰性(慣性)で走行させる惰性走行とを繰り返すことで、内燃機関を連続運連させて走行するよりも低燃費で走行できるようにしたものが知られている(例えば、特許文献1参照)。この装置では、低燃費走行期間における加速走行の開始直後や停止直前のタイミングで、加速走行の途中期間より走行駆動動力を低下させるとともに充電電力を増加させて車両加速度の変化を滑らかにしている。
【0005】
一方、原動機からの回転動力により走行駆動される車両では、原動機の出力トルクの変動により走行駆動系に振動が生じ、その振動数が車両に固有な共振周波数域に重なると、振動・騒音が悪化するため、それを抑制する必要がある。
【0006】
そこで、例えば内燃機関のクランキング中の回転数(回転速度)の上昇度合いが反力トルクの増加により低下する時点におけるその回転数が車両の共振域に重なるのを防止すべく、クランキングトルクを調整するものが知られている(例えば、特許文献2参照)。
【0007】
また、電動機の出力トルクと内燃機関のフリクショントルクとが釣り合うときの機関回転数が車両の共振周波数域内に入ると推定されると、その共振周波数域から所定回転数分だけ低い回転数で内燃機関をクランキングするように、発電電動機のトルクを調整するものも知られている(例えば、特許文献3参照)。
【0008】
さらに、内燃機関を停止させるために切換クラッチ等が解放され、その機関回転数が変速機側回転要素の回転数に拘束されない自由回転状態になったとき、電動機を用いて機関回転数を共振発生の抑制が可能な回転速度まで低下させることで、エンジン停止性を向上させるようにしたものも知られている(例えば、特許文献4参照)。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2010−6309号公報
【特許文献2】特開2009−215958号公報
【特許文献3】特開2008−25375号公報
【特許文献4】特開2006−46541号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、原動機の断続運転による低燃費走行の制御を行うようにした従来の車両用制御装置にあっては、原動機の断続運転による低燃費走行中に、その断続運転に起因して振動・騒音が生じてしまう可能性があった。
【0011】
すなわち、原動機の断続運転による低燃費走行中には、原動機の出力である走行駆動用の回転動力が比較的長い周期で断続され、車速が設定速度域内で繰り返し増加および減少するため、例えば原動機から出力される動力を走行駆動車輪まで伝達する動力伝達機構において周波数の低いねじり振動や騒音が生じたり、原動機となる電動機のスイッチングの繰り返しに起因する騒音が生じたりする場合がある。そして、その場合、長周期の騒音や振動の周波数が車両の共振周波数と重なると、車両の乗り心地を害する程度にその振動・騒音レベルが高くなってしまう。
【0012】
一方、原動機の出力トルクの変動周波数が車両の共振周波数域に重ならないようにする振動抑制制御を行う車両用制御装置にあっては、単に原動機の出力トルクや負荷トルクを調整する程度の制御となっていたため、原動機の断続運転による長周期の車速変動に伴って生じる振動や騒音を有効に抑制できなかった。
【0013】
そこで、本発明は、原動機の断続運転による低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができる車両用制御装置を提供することを目的とする。
【課題を解決するための手段】
【0014】
本発明に係る車両用制御装置は、上記目的達成のため、(1)要求出力に応じて制御される原動機と該原動機の出力に応じた走行駆動力を発生させる動力伝達機構とを備えるとともに前記原動機が少なくとも電動機で構成されている車両に装備され、前記要求出力が予め設定された変動幅内に保持されていることを条件に、前記原動機の出力を断続させる断続運転を実行して、前記車両を前記走行駆動力で加速する加速走行と前記車両を惰性で走行させる惰性走行とを交互に実行させる車両用制御装置であって、前記断続運転のための前記原動機の出力変動に伴う特定の振動の周波数が前記車両の共振周波数域内に入るか否かを判定する共振判定部と、該共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件に、前記特定の振動の周波数が前記共振周波数域から外れるように前記断続運転の条件を通常とは異なる条件に変更する断続運転条件変更部と、を備えたことを特徴とする。
【0015】
この構成により、断続運転のための原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域内に入ると共振判定部で判定されると、その特定の振動の周波数が車両の共振周波数域から外れるように、断続運転条件変更部により、原動機の断続運転の条件が通常とは異なる条件に変更される。したがって、原動機の断続運転に起因する振動や騒音が車両の共振周波数域で悪化することが、有効に抑制される。その結果、原動機の断続運転による低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができる車両用制御装置となる。
【0016】
なお、ここで、要求出力とは、運転者のアクセルペダル操作量等に応じた要求出力、もしくはクルーズコントロール等の他の走行制御機能から要求される要求出力、またはそのような複数の要求出力に基づいて算出される要求出力である。
【0017】
本発明に係る車両用制御装置においては、好ましくは、(2)前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速走行中における前記原動機の出力値と前記断続運転の実行期間中における前記原動機の出力の断続周期とのうち少なくとも一方を変更するものである。
【0018】
この構成により、例えば原動機の出力値が変更されると、断続運転中の車速変動範囲の上限車速に達するまでの加速時間が変化するので、原動機の断続周期を変化させてその出力の変動周波数を車両の共振周波数域から外すことができる。また、原動機の出力値を変えることなく、原動機の断続周期を変化させても、その出力の変動周波数を車両の共振周波数域から外すことができる。
【0019】
本発明に係る車両用制御装置においては、また、(3)前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速走行または前記惰性走行を少なくとも1回含むよう予め設定された共振回避期間内に、前記断続運転の条件を前記通常とは異なる条件に変更することが好ましい。
【0020】
この場合、低燃費条件で実行される断続運転中の共振回避期間を短く抑え、エネルギ消費率(単位エネルギ消費量当りの走行距離)を抑えることができる。
【0021】
上記(2)または(3)の構成を有する車両用制御装置においては、(4)前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速走行中の前記原動機の出力値を通常の出力値より増加させることが好ましい。
【0022】
この場合、断続運転中の加速走行期間内における加速度が低下することがなく、共振回避制御のための断続運転条件の変化による乗り心地の低下が生じ難い。
【0023】
上記(2)〜(4)のいずれかの構成を有する車両用制御装置においては、(5)前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記断続運転の実行期間中における前記原動機の出力の断続周期を通常の断続周期より短くすることが好ましい。
【0024】
この場合、断続運転による車速変化の周期も短くなるので、共振回避制御のための断続運転条件の変化による乗り心地の低下が生じ難い。
【0025】
本発明に係る車両用制御装置においては、(6)前記断続運転の条件が、前記断続運転の実行期間中に前記加速走行毎の前記原動機の運転状態を終了させる加速終了車速と、前記断続運転の実行期間中に前記惰性走行毎の前記原動機の停止状態を終了させる停止終了車速と、のうち少なくとも一方を含み、前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速終了車速と前記停止終了車速とのうち少なくとも一方を、前記特定の振動の周波数が前記共振周波数域から外れるように変更することが好ましい。
【0026】
この構成により、出力の変化の有無に関係なく、加速終了車速と停止終了車速とのうち少なくとも一方を変更するだけで、原動機の出力変動に伴う特定の振動の周波数を共振周波数域から外すことができ、簡単な制御で共振回避可能となる。
【0027】
上記(6)を備えた車両用制御装置においては、(7)前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速終了車速を通常の加速終了車速よりも低い車速に変更するものであってもよい。
【0028】
この場合、共振回避制御時に車速変化の周期が短くなることになり、断続運転条件の変化による乗り心地の低下が生じ難い。
【0029】
上記(6)または(7)を備えた車両用制御装置においては、(8)前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記停止終了車速を通常の停止終了車速よりも高い車速に変更するものであってもよい。
【0030】
この場合も、共振回避制御時に車速変化の周期が短くなることになり、断続運転条件の変化による乗り心地の低下が生じ難い。
【0031】
本発明に係る車両用制御装置においては、(9)前記断続運転条件変更部は、前記断続運転の条件として、前記特定の振動の周波数が前記共振周波数域から外れる通常時に設定される第1の断続運転条件と、前記特定の振動の周波数が前記共振周波数域内に入るときに設定される第2の断続運転条件と、を読み出し可能に記憶した条件記憶メモリを有しているのがよい。この構成により、原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域内に入るときに断続運転条件を迅速に切り替えて的確な共振回避制御を実行することができる。
【0032】
なお、車速や騒音環境の変化に対する運転者や他の乗員の感覚的な許容範囲は、高速側になるほど広くなる傾向があるから、その範囲内で高車速になるほど加速終了車速と停止終了車速の間の車速変動幅が拡大され得る。また、断続運転の条件は、車速に応じて異なる複数の条件に設定されるものに限らず、他の走行条件、例えば路面の傾斜度(例えば、登坂路、下り坂)や、路面の状況(例えばウェット路面、雪道、氷結路、アスファルト、砂利道等)に応じて異なる条件に設定されてもよい。
【発明の効果】
【0033】
本発明によれば、断続運転のための原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域内に入ると判定されると、その特定の振動の周波数が車両の共振周波数域から外れるように、原動機の断続運転条件が通常とは異なる条件に変更されるので、原動機の断続運転に起因する振動や騒音が車両の共振周波数域で悪化することを有効に抑制して、原動機の断続運転による低燃費走行中にその断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができる車両用制御装置を提供することができる。
【図面の簡単な説明】
【0034】
【図1】本発明の第1実施形態に係る車両用制御装置を備えたハイブリッド車両の走行駆動システムの概略構成図である。
【図2】本発明の第1実施形態に係る車両用制御装置における原動機の断続運転の条件を示すタイミングチャートであり、図2(a)は原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域から外れる通常時に適用される第1の断続運転条件を示し、図2(b)は特定の振動の周波数を車両の共振周波数域から外す共振回避制御時に適用される第2の断続運転条件を示している。
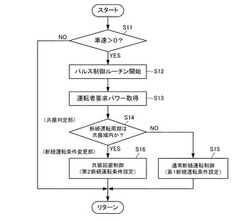
【図3】本発明の第1実施形態に係る車両用制御装置において実行される断続運転条件の変更処理手順を示すフローチャートである。
【図4】本発明の第1実施形態に係る車両用制御装置において実行される断続運転の概略の手順を示すフローチャートである。
【図5】本発明の第2実施形態に係る車両用制御装置における原動機の断続運転の条件を示すタイミングチャートであり、図5(a)は原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域から外れる通常時に適用される第1の断続運転条件を示し、図5(b)は特定の振動の周波数を車両の共振周波数域から外す共振回避制御時に適用される第2の断続運転条件を示している。
【図6】本発明の第3実施形態に係る車両用制御装置における原動機の断続運転の条件を示すタイミングチャートであり、図6(a)は原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域から外れる通常時に適用される第1の断続運転条件を示し、図6(b)は特定の振動の周波数を車両の共振周波数域から外す共振回避制御時に適用される第2の断続運転条件を示している。
【図7】本発明の第4実施形態に係る車両用制御装置における原動機の断続運転の条件を示すタイミングチャートであり、図5(a)は原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域から外れる通常時に適用される第1の断続運転条件を示し、図5(b)は特定の振動の周波数を車両の共振周波数域から外す共振回避制御時に適用される第2の断続運転条件を示している。
【図8】本発明の第5実施形態に係る車両用制御装置における原動機の断続運転の条件を示すタイミングチャートであり、図8(a)は原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域から外れる通常時に適用される第1の断続運転条件を示し、図8(b)は特定の振動の周波数を車両の共振周波数域から外す共振回避制御時に適用される第2の断続運転条件を示している。
【発明を実施するための形態】
【0035】
以下、本発明の好ましい実施形態について、図面を参照しつつ説明する。
【0036】
(第1実施形態)
図1ないし図4に示す本発明の第1実施形態を示している。なお、本実施形態は、本発明に係る車両用制御装置をハイブリッド車両の走行駆動システムに装備したものである。ただし、本発明は、走行駆動用の動力源となる原動機を電動機のみで構成した電気自動車や他の方式のハイブリッド車両(例えば、シリーズタイプのハイブリッド車両)であってもよいことはいうまでもない。
【0037】
図1に示すように、本実施形態の車両用制御装置を装備するハイブリッド車両1は、要求出力に応じて制御される走行駆動用の原動機として、内燃機関であるエンジン10と、それぞれ発電可能な電動機であるモータジェネレータ(以下、単にモータという)MG1、MG2とを含む、ハイブリッド駆動装置20を備えている。
【0038】
このハイブリッド駆動装置20は、車両用制御装置30によって制御され、エンジン10およびモータMG1、MG2のうち少なくとも1つから出力される動力に応じて、ハイブリッド車両1を走行駆動する走行駆動力を発生させることができる。
【0039】
エンジン10は、多気筒の内燃機関、例えば4サイクルのガソリンエンジンである。また、モータMG1、MG2は、それぞれ変速機ケース5(詳細図示せず)の内部に収納されており、変速機ケース5はエンジン10に締結されている。
【0040】
モータMG1、MG2は、それぞれ永久磁石同期発電電動機として構成され、供給される電力を回転動力に変換して出力する電動機の機能と、入力された回転動力を電力に変換して出力する発電機の機能とを併有している。また、モータMG1は主に発電機として用いられ、モータMG2は主に電動機として用いられるようになっている。
【0041】
具体的には、モータMG1は、複数の永久磁石をそれぞれ略V字型に配置してリラクタンストルクを利用可能にした内部磁石型のロータ51と、3相コイルが巻回されたステータ53とを有しており、ステータ53がインバータ61から交流電力の供給を受けて回転磁界を形成するとき、その回転磁界によってロータ51が回転するようになっている。同様に、モータMG2は、複数の永久磁石をそれぞれ略V字型に配置してリラクタンストルクを利用可能にした内部磁石型のロータ52と、3相コイルが巻回されたステータ54とを有しており、ステータ54がインバータ62から交流電力の供給を受けて回転磁界を形成するとき、その回転磁界によってロータ52が回転するようになっている。また、モータMG1、MG2には、それぞれロータ51、52の回転角位置を検出する図示しないレゾルバが設けられている。
【0042】
ハイブリッド駆動装置20は、エンジン10およびモータMG1、MG2のうち少なくとも1つから出力される回転動力を、動力分割統合機構40および減速機構70を介して差動機構80に伝達し、差動機構80から左右のドライブシャフト3を介して左右の走行駆動車輪2に差動可能に動力伝達できる。そして、左右の走行駆動車輪2は、その伝達動力に応じてハイブリッド車両1の走行駆動力を発生させるようになっている。
【0043】
すなわち、ハイブリッド駆動装置20は、エンジン10およびモータMG1、MG2に加え、原動機出力に応じた走行駆動力を発生させる動力伝達機構として、動力分割統合機構40、減速機構70および差動機構80を含んだ構成となっている。
【0044】
動力分割統合機構40は、第1および第2の遊星歯車機構40a、40cと、両遊星歯車機構40a、40cに共通の出力要素40bと、によって構成されており、エンジン10からの動力を走行駆動用と発電用の動力に分割したり、エンジン10およびモータMG1、MG2のうちいずれか1つまたは複数からの原動機出力を統合して出力したりする機能を有している。
【0045】
第1の遊星歯車機構40aは、エンジン10からの回転動力を、発電機モードのモータMG1を駆動する動力と、ハイブリッド車両1の走行駆動のために減速機構70側に出力される動力とに分割することができる動力分割機能を有している。また、モータMG1が電動機モードで動作するときには、その動力を減速して出力する機能を併有している。
【0046】
この第1の遊星歯車機構40aは、図示しないダンパ要素を介してエンジン10の機関出力軸12に結合された入力要素としての第1プラネタリキャリア44と、モータMG1のロータ51に結合された入出力要素としての第1サンギヤ42と、第1プラネタリキャリア44に自転可能に支持されて第1サンギヤ42の周りを公転することができる複数の第1プラネタリピニオン43と、これら第1プラネタリピニオン43が内接噛合する出力要素としての第1リングギヤ45aと、によって構成されている。
【0047】
第2の遊星歯車機構40cは、電動機モードのモータMG2が出力した回転動力を減速してその出力トルクを増大させる減速機能を有しており、動力分割用の遊星歯車機構40aと同一の回転中心軸線上に配置されている。また、モータMG2が発電機モードで動作するときには、出力要素40b側からの動力をモータMG2に取り込む機能を併有している。
【0048】
この第2の遊星歯車機構40cは、モータMG2のロータ52に結合された入出力要素としての第2サンギヤ46と、変速機ケース5に支持された固定要素としての第2プラネタリキャリア47と、第2プラネタリキャリア47に自転可能に支持された複数の第2プラネタリピニオン48と、これら第2プラネタリピニオン48が内接噛合する出力要素としての第2リングギヤ45cと、によって構成されている。そして、この第2リングギヤ45cが第1の遊星歯車機構40aの第1リングギヤ45aと一体に結合されて環状の出力要素40bが構成され、その出力要素40bにカウンタドライブギヤ49が装着されている。
【0049】
減速機構70は、例えばカウンタドライブギヤ49に噛合するカウンタドリブンギヤ74と、カウンタドリブンギヤ74に一体に結合するファイナルドライブギヤ78とを含んで構成されている。また、差動機構80は、ファイナルドライブギヤ78に噛合するリングギヤ82を有し、リングギヤ82に伝達される動力を左右のドライブシャフト3に差動可能に出力する公知のものである。なお、走行駆動車輪2の近傍には、車速センサ102として機能する車輪速センサ(詳細図示せず)が設けられている。
【0050】
一方、ハイブリッド駆動装置20の出力を制御する車両用制御装置30は、モータECU60、インバータ61、62、HVECU100、アクセルポジションセンサ101、車速センサ102、EV走行選択スイッチ103、エコスイッチ104、ハイブリッド駆動用の二次電池105、昇圧コンバータ106、電池ECU107および図示しないスキッド制御ECU等を含んで構成されている。
【0051】
モータECU60は、インバータ61、62を介してモータMG1、MG2を制御するための制御プログラムを有しており、HVECU100からのトルク指令値に応じて作動する。このモータECU60は、モータMG1、MG2の電動機としての出力トルクや回転速度あるいは発電機出力を、指令値に応じて制御するようになっている。また、モータECU60は、例えばモータMG1、MG2の内部磁石型のロータ51、52内の永久磁石の回転位置と両ロータ51、52の回転速度とを、前記レゾルバの検出信号を基に把握して、モータMG1、MG2を高効率に制御できるようになっている。さらに、モータECU60は、モータMG1、MG2のいずれか、例えばモータMG1によってエンジン10を始動させる場合に、その始動に必要な電力量を算出できるようになっている。
【0052】
インバータ61、62は、モータMG1、MG2に対応して設けられ、ハイブリッド駆動用の二次電池105の電圧を高電圧に昇圧させる昇圧コンバータ106と協働して、高電圧の電流とモータMG1、MG2の3相交流の間の変換を行う機能を有している。これら複数のインバータ61、62では、モータECU60からの指令値に応じて所定範囲内の任意の電圧と周波数でモータMG1、MG2に駆動電流を供給できる。また、各インバータ61、62では、対応するモータMG1またはMG2で発電された交流電流を二次電池105に充電するための直流電流に変換することができるようになっている。なお、モータMG1、MG2に対するこのようなインバータ61、62を介した電力供給や電力回収は、モータECU60およびHVECU100により制御される。
【0053】
アクセルポジションセンサ101は、ハイブリッド車両1に装備された図示しないアクセルペダルの操作量に対応する信号を、運転者からの要求アクセル開度Accとして出力するものである。車速センサ102は、例えば公知の車輪速センサで構成される。
【0054】
また、EV走行選択スイッチ103は、ハイブリッド駆動装置20のモータMG1、MG2のうちいずれか一方の電動機出力のみでハイブリッド車両1を走行させる電気自動車モードを選択したり、その選択状態を解除したりすることができるスイッチであり、運転者によってその選択状態(ON状態)と選択解除状態(OFF状態)とに操作される。
【0055】
エコスイッチ104は、HVECU100に対して、ハイブリッド駆動装置20の単位走行距離当りのエネルギ消費量を低減させることを通常より優先する走行駆動制御を要求する燃費優先走行モードの選択用および選択解除用のスイッチとして設けられている。
【0056】
ハイブリッド駆動用の二次電池105は、ハイブリッド車両1の発進時や加速時、登坂時等に電動機モードで作動するモータMG1、MG2のいずれかに電力を供給する一方、発電機モードで作動するモータMG1、MG2のいずれかからの発電電力(例えば、減速時の回生発電電流)によって充電され、蓄電することができるようになっている。
【0057】
電池ECU107は、電源監視プログラムを有しており、二次電池105の電圧、電流および温度を表す電源監視情報をHVECU100に出力できるようになっている。
【0058】
HVECU100は、ハイブリッド駆動システム制御用の電子制御ユニットである。このHVECU100は、原動機であるエンジン10およびモータMG1、MG2を要求出力に応じて作動するように統合制御する統合制御プログラムを内蔵している。なお、ここにいう要求出力(要求パワー)とは、運転者のアクセルペダル操作量等に応じた要求出力、もしくはクルーズコントロール等の他の走行制御機能から要求される要求出力、またはそのような複数の要求出力に基づいて算出される要求出力である。
【0059】
HVECU100は、その詳細なハードウェア構成を図示しないが、例えばCPU、ROM、RAMおよび書換え可能な不揮発性メモリを備えるとともに、A/D変換器を有する入力インターフェース回路、ドライバやリレースイッチを有する出力インターフェース回路、他の車載ECUとの間でデータ通信を行う通信ポート等を含んで構成されている。ROMおよび書換え可能な不揮発性メモリ(以下、ROM等という)には、例えば各種制御を実行するための制御プログラムが格納されるとともに、各種のマップや設定値データ等が格納されている。
【0060】
このHVECU100は、例えば運転者のアクセルペダル操作量に対応するアクセルポジションセンサ101からの要求アクセル開度Accと、車速センサ102からの車速信号、エンジン10内の図示しないクランク角センサからのエンジン回転数信号等を検出するとともに、エコスイッチ104からの燃費優先走行モードの選択信号(ON信号)またはその選択後の解除信号(OFF信号)を入力するようになっている。また、HVECU100は、例えば図示しないスキッド制御ECUからの駆動力分割比(エンジン10からの走行駆動のための配分動力と発電機作動時のモータMG1またはMG2への配分動力との比率)の要求値とを入力する。
【0061】
そして、これらの入力情報を基に、HVECU100は、ハイブリッド駆動装置20のトータル出力値と、エンジン10に要求されるパワー指令値およびエンジン回転数と、モータMG1、MG2へのトルク指令値等を算出して、パワー指令値およびエンジン回転数指令値を内蔵するエンジンECUに出力するとともに、トルク指令値をモータECU60に出力するようになっている。
【0062】
また、HVECU100は、電池ECU107からの電源監視情報に基づき、ハイブリッド駆動用の二次電池105の放電量および回生量を常時把握して、二次電池105の全電池容量に対する充電量比率に相当するSOC(State Of Charge)[%]を算出し、そのSOCの変動範囲を二次電池105の信頼性および寿命の面等から設定された所定の利用変動範囲内に制限するようになっている。
【0063】
加えて、HVECU100は、前記スキッド制御ECUと協働して、左右の走行駆動車輪2の回転速度を検出する車輪速センサ等の検出情報を基に、低μ路でのタイヤスリップ等により駆動力が急変し始めるときには、モータMG1、MG2のトルク指令値を変化させ、アクセルペダル操作等による要求出力に応じた駆動力を路面に伝えるトラクション制御を実行するようになっている。
【0064】
HVECU100に内蔵されるエンジンECUは、前記パワー指令値および各種センサ情報を基にエンジン10の出力を制御するための制御プログラムやマップを有している。このエンジンECUは、パワー指令値を入力すると、そのパワー指令値に対応するエンジン出力が得られるスロットル開度と、燃料噴射時間(燃料噴射量および噴射期間)および点火時期とを、マップおよび各種センサ情報を基に算出するようになっている。そして、エンジンECUは、入力されたパワー指令値に応じて、図示しない電子制御スロットル弁、インジェクタおよびイグニッションコイルに対して制御信号を出力するようになっている。また、このエンジンECUは、ハイブリッド駆動装置20がエンジン10のみの動力で走行駆動力を発生させるときには、ROM等に格納されたエンジン10の機関回転速度および機関負荷に対して燃料消費率や機関出力の値を特定可能な機関性能マップ等に基づいて、エンジン10を最適燃費に近い動作点に制御するようになっている。
【0065】
一方、HVECU100は、要求アクセル開度Acc等に基づいて算出される要求出力が予め設定された判定時間内において一定の変動幅内に保持されるとき(エコスイッチ104により燃費優先走行モードが選択されていることを更なる条件としてもよい)、ハイブリッド駆動装置20の燃料消費量を抑える(燃料消費率(km/L)や電力消費率(Km/kWh)を向上させる)ために、ハイブリッド駆動装置20を断続運転させながらハイブリッド車両1を走行させることができるようになっている。
【0066】
ここでの断続運転とは、ハイブリッド駆動装置20からの走行駆動力の出力によってハイブリッド車両1を加速する加速走行と、その加速後のハイブリッド車両1を惰性で走行させる惰性走行とを、交互に実行させるように走行駆動力を制御する運転である。
【0067】
また、ここにいう要求出力の一定の変動幅とは、運転者の要求出力が略一定レベルに保持されていると判断できる程度にその要求出力の変動量が少なく、一定時間当りの要求出力の変化量の絶対値(変化率)が予め設定された閾値変化率(例えば、数秒以上の一定時間内に車速が時速で数km/hだけ増加または減少する程度の要求出力の変化率)以下にとなる範囲を意味する。
【0068】
より具体的には、HVECU100は、アクセルポジションセンサ101からの要求アクセル開度Acc(運転者の要求出力)やその時点での車速その他の車両の走行状態に関する各種センサ情報を基に、ハイブリッド駆動制御の周期毎に目標車速を設定する。
【0069】
そして、ハイブリッド駆動装置20を断続運転させながらハイブリッド車両1を低燃費走行させる断続運転制御を実行するに際して、HVECU100は、まず、目標車速が、ハイブリッド駆動装置20の出力を断続させながらハイブリッド車両1を低燃費で走行させ得る車速域として予め設定された断続運転可能車速域、例えば中低速で市街地を走行する場合のような車速域内に入るか否かを判定する。
【0070】
そして、HVECU100は、目標車速がその断続運転可能車速域内に入り、かつ、要求出力が予め設定された判定時間内において前記一定の変動幅内に保持されると判定されることを条件に、ハイブリッド駆動装置20を断続運転させるようになっている。
【0071】
ハイブリッド駆動装置20の断続運転は、例えばエンジン10およびモータMG1、MG2のうち少なくともいずれか1つの原動機、例えば電動機モードのモータMG2を断続的に作動させることによって実行される。
【0072】
すなわち、モータMG2を電動機モードで断続運転させることで、ハイブリッド駆動装置20の出力を断続させる場合、HVECU100は、ハイブリッド駆動装置20のモータMG2を原動機として走行駆動力を発生させてハイブリッド車両1を加速(惰性走行後の速度回復時を含む)させる駆動出力状態と、モータMG2の出力を停止させてハイブリッド車両1を惰性(慣性)で走行させる出力停止状態とを交互に実行させる。したがって、ハイブリッド車両1は、ハイブリッド駆動装置20の駆動出力状態下で加速する加速走行と、ハイブリッド駆動装置20の出力停止状態(モータMG1、MG2のいずれか一方または双方の空転状態を含む)の下で惰性により走行する惰性走行とを繰り返しつつ、目標車速を含む許容変動幅内で走行することになる。
【0073】
また、HVECU100は、例えばハイブリッド駆動用の二次電池105の蓄電量(SOC)が不足している場合や要求出力が所定値を超える大きな要求出力値である場合は、断続運転可能車速域内において、モータMG2を原動機モードで断続運転させるとともに、その断続運転の開始時にモータMG1、MG2を共に電動機モードで同方向に作動させてエンジン10を始動させ、モータMG2だけでなくエンジン10をも断続運転させることができるようになっている。
【0074】
すなわち、HVECU100は、ハイブリッド駆動装置20に、エンジン10およびモータMG2からの動力により走行駆動力を発生させてハイブリッド車両1を加速させる駆動出力状態と、エンジン10およびモータMG2の出力を停止させてハイブリッド車両1を惰性(慣性)で走行させる出力停止状態とを交互に実行させることができる。
【0075】
したがって、この場合にも、ハイブリッド車両1は、ハイブリッド駆動装置20の駆動出力状態下で加速する加速走行と、ハイブリッド駆動装置20の出力停止状態下で惰性により走行する惰性走行とを繰り返しつつ、目標車速を含む許容変動幅内で走行することができる。
【0076】
より具体的には、図2(a)に示すように、HVECU100は、例えば現在の検出車速に近い目標車速V1Sが断続運転可能車速域内に入っており、かつ、要求アクセル開度Acc等に基づく運転者の要求パワー[kW]が略一定に保持されていると判定した時点(以下、断続開始時点という)T0から、ハイブリッド駆動装置20の断続運転(同図中の基準制御)を開始させる。そして、その断続運転の開始に際し、目標車速V1Sに対して車速変化がさほど感じられない通常許容レベルの速度変動幅に相当する制御速度範囲VR1を設定するようになっている。
【0077】
また、HVECU100は、断続開始時点T0で、原動機、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させ、走行中のハイブリッド車両1を惰性(慣性)で走行させ、その車速を制御速度範囲VR1の下限車速である停止終了車速V1Lまで低下させる。なお、図2(a)では、断続開始時点T0での車速を一例として目標車速V1Sよりわずかに大きい車速で例示しているが、これに限られないことはいうまでもない。
【0078】
車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除し、モータMG2(あるいはモータMG2およびエンジン10)から出力値Pm1の動力を出力させて、所定の加速走行の持続時間tm1の間、ハイブリッド駆動装置20により走行駆動力を発生させてハイブリッド車両1を加速させる(駆動出力状態)。さらに、その加速によって車速センサ102の検出車速が制御速度範囲VR1の上限車速である加速終了車速V1Hに達すると、モータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させて所定の惰性走行の持続時間t1だけハイブリッド車両1を惰性(慣性)で走行させる(出力停止状態)。
【0079】
HVECU100は、目標車速が断続運転可能車速域内に入っており、かつ、要求アクセル開度Acc等に基づく運転者の要求パワーが略一定に保持されている期間中、ハイブリッド駆動装置20を上述のような駆動出力状態と出力停止状態とを交互に繰り返す断続運転状態にする。
【0080】
この断続運転状態では、加速終了車速V1Hにおいてハイブリッド駆動装置20からの出力を停止させ、ハイブリッド車両1の車速が制御速度範囲VR1の加速終了車速V1Hから停止終了車速V1Lに低下するまで、モータMG2やエンジン10からの出力は停止されるから、その停止期間中におけるハイブリッド駆動装置20の電力消費量や燃料消費量はゼロとなる。一方、停止終了車速V1Lにおいてハイブリッド駆動装置20からの出力(同図中のモータ出力)を再開させ、ハイブリッド車両1の車速を制御速度範囲VR1の停止終了車速V1Lから加速終了車速V1Hに上昇させるときのハイブリッド駆動装置20の出力値Pm1は、目標車速V1Sに対応するモータ出力よりわずかに高い出力値となり、モータMG2の電力消費量はさほど増加することがなく、エンジン10の燃費もさほど変化しない。
【0081】
したがって、上述のようなハイブリッド駆動装置20の断続運転を実行する場合、ハイブリッド駆動装置20を用いて目標車速V1Sで定速走行させる場合に比べて、ハイブリッド駆動装置20の電力消費量や燃料消費量は少なくて済み、ハイブリッド車両1の低燃費走行が可能となる。
【0082】
一方、HVECU100は、上述のハイブリッド駆動装置20の断続運転による低燃費走行中に、その断続運転に起因する振動・騒音が車両の共振域で悪化するのを防止するよう制御を実行できるようになっている。
【0083】
すなわち、ハイブリッド駆動装置20の断続運転中には、その原動機出力である走行駆動用の回転動力が比較的長い周期で断続され、車速が設定速度域内で繰り返し増加および減少するため、例えば原動機から出力される動力を走行駆動車輪2まで伝達する動力伝達機構(動力分割統合機構40、減速機構70および差動機構80)において比較的周波数の低いねじり振動や騒音が生じたり、原動機となるモータMG2(またはMG1)のスイッチングの繰り返しに起因する騒音が生じたりする場合がある。そして、そのような比較的長周期の特定の振動や騒音(以下、単に特定の振動という)の周波数が車両の共振周波数域内に入ると、車両の乗り心地を害する程度にその振動・騒音レベルが高くなってしまう。
【0084】
そこで、HVECU100は、ROM等に予め格納された共振回避制御プログラムに従って、ハイブリッド駆動装置20の断続運転のために原動機であるモータMG2(あるいはモータMG2およびエンジン10)の出力が変動することに起因して生じる特定の振動の周波数が、ハイブリッド車両1の共振周波数域として予め設定された特定の周波数範囲内に入るか否かを判定する共振判定部111の機能を発揮するようになっている。また、HVECU100は、前記共振回避制御プログラムに従って、共振判定部111により原動機出力の変動に伴う特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されたことを条件に、その特定の振動の周波数が共振周波数域から外れるようにハイブリッド駆動装置20の断続運転の条件を通常とは異なる条件に変更する断続運転条件変更部112の機能を発揮するようになっている。
【0085】
具体的には、共振判定部111は、例えばハイブリッド車両1の各走行状態についてハイブリッド駆動装置20の断続運転に起因して生じる特定の振動がハイブリッド車両1の共振周波数域で大きくなるか否かを判定するための判定用データテーブルを有している。
【0086】
この判定用データテーブルは、例えばハイブリッド車両1についての予めの実験によって、ハイブリッド駆動装置20の原動機の出力(パワー)[kW]および断続周期[秒]とハイブリッド車両1の車速[km/h]とをそれぞれ変化させた場合の各運転状態について、その運転状態下でのハイブリッド駆動装置20の断続運転に起因して生じる特定の振動のレベルを測定した結果に基づいて作成されている。また、この判定用データテーブルは、各運転状態下で、ハイブリッド駆動装置20の断続運転に起因して生じる特定の振動のレベルが、ハイブリッド車両1の共振周波数域で予め設定した共振判定閾値を超えて大きくなり、ハイブリッド車両1の乗り心地を低下させるか否かを判定した結果を集めたものである。その共振判定閾値は、ハイブリッド駆動装置20の原動機出力変動に起因して生じる特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ることで、特定の振動のレベルがその閾値を超えて大きくなるような値として設定されている。なお、ここにいうハイブリッド車両1の共振周波数域とは、例えばエンジン10が停止する際にそのアイドル回転数未満の低回転速度領域で動力伝達系を振動させるとともに、エンジンマウント等を介して車体側に振動を伝達させる場合のような、低周波数の共振領域である。
【0087】
このような判定用データテーブルを有する共振判定部111は、ハイブリッド駆動装置20の原動機出力[kW]やハイブリッド車両1の車速[km/h]を所定時間毎に取り込み、それらの条件とハイブリッド駆動装置20の断続運転のために設定している原動機の断続周期とを基に、判定用データテーブルを参照して、前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ってその特定の振動が悪化するか否かを判定することができるようになっている。
【0088】
一方、断続運転条件変更部112は、ハイブリッド駆動装置20の断続運転の条件として、前記特定の振動の周波数がハイブリッド車両1の共振周波数域から外れる通常時に設定される第1の断続運転条件と、前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入るときに設定される第2の断続運転条件と、を読み出し可能に記憶した条件記憶メモリ112aを有している。
【0089】
この断続運転条件変更部112は、共振判定部111によって前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されることを条件として、第1の断続運転条件から第2の断続運転条件への運転条件の変更を行うことで、ハイブリッド車両1の加速走行中における原動機の出力値と、ハイブリッド駆動装置20の断続運転の実行期間中における原動機の出力の断続周期とのうち、少なくとも一方を変更するようになっている。
【0090】
すなわち、断続運転条件変更部112は、例えば断続運転中の駆動出力状態にあるときのモータMG2(あるいはモータMG2およびエンジン10)の出力値および断続周期のうち少なくとも一方を変更することができるようになっている。
【0091】
また、断続運転条件変更部112は、共振判定部111によって前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されることを条件として、ハイブリッド駆動装置20の断続運転による加速走行または惰性走行を少なくとも1回含むよう予め設定された共振回避期間中に、断続運転の条件を通常の第1の断続運転条件とは異なる第2の断続運転条件に変更することができるようになっている。
【0092】
具体的には、断続運転条件変更部112は、共振判定部111によって特定の振動の周波数が共振周波数域内に入ると判定されることを条件として、加速走行中の原動機、例えばモータMG2(あるいはモータMG2およびエンジン10)の出力値を通常の出力値より増加させるか、あるいは、断続運転の実行期間中におけるモータMG2の出力の断続周期を通常の断続周期より短くするようになっている。
【0093】
また、断続運転条件変更部112によって変更可能な断続運転の条件には、断続運転の実行期間中における加速走行毎のモータMG2の運転状態を終了させる加速終了車速と、断続運転の実行期間中における惰性走行毎のモータMG2の停止状態を終了させる停止終了車速と、のうち少なくとも一方が含まれている。
【0094】
そして、断続運転条件変更部112は、共振判定部111によって前記特定の振動の周波数が共振周波数域内に入ると判定されることを条件として、加速終了車速と停止終了車速とのうち少なくとも一方を、前記特定の振動の周波数がハイブリッド車両1の共振周波数域から外れるように変更する。その変更は、例えば、加速終了車速を通常の加速終了車速よりも低い車速に変更するか、停止終了車速を通常の停止終了車速よりも高い車速に変更するものである。
【0095】
より具体的には、断続運転条件変更部112は、共振判定部111によって前記特定の振動の周波数が共振周波数域内に入ると判定されず、共振周波数域から外れると判定されたときには、図2(a)に基準制御としてタイミングチャートで示すような第1の断続運転条件を設定する。一方、断続運転条件変更部112は、共振判定部111によって前記特定の振動の周波数が共振周波数域内に入ると判定されたときには、図2(b)にNV回避制御として実線のタイミングチャートで示すような第2の断続運転条件を設定する。
【0096】
図2(a)に示す第1の断続運転条件の下では、HVECU100は、断続開始時点T0から、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR1を設定する。また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速を制御速度範囲VR1の停止終了車速V1Lまで低下させる。そして、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm1の間、ハイブリッド車両1を加速させる(駆動出力状態)。さらに、その加速によって車速が制御速度範囲VR1の加速終了車速V1Hに達すると、モータMG2からの出力を停止させて所定の惰性走行の持続時間t1だけハイブリッド車両1を惰性走行させる(出力停止状態)。
【0097】
HVECU100は、また、目標車速が断続運転可能車速域内に入っており、かつ、要求出力が略一定に保持されている期間中は、ハイブリッド駆動装置20を上述のような断続運転状態にする。したがって、ハイブリッド駆動装置20の電力消費量や燃料消費量は少なくて済み、ハイブリッド車両1の低燃費走行が可能となる。
【0098】
図2(b)に示す第2の断続運転条件の下では、HVECU100は、断続開始時点T0から、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR2を設定する。ここで、制御速度範囲VR2は、制御速度範囲VR1の加速終了車速V1Hに対し低車速側にずれた別の加速終了車速V1H´と制御速度範囲VR1の停止終了車速V1Lとの間の車速変動範囲として設定される。すなわち、制御速度範囲VR2は、制御速度範囲VR1とは異なる速度制御範囲として設定される。
【0099】
また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速を制御速度範囲VR1の停止終了車速V1Lまで低下させる。そして、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm2の間、ハイブリッド車両1を加速させる(駆動出力状態)。次いで、共振回避制御の主要な処理が実行される回避期間に入り、加速走行によって車速が通常の加速終了車速V1Hより低速側に設定された別の加速終了車速V1H´に達すると、モータMG2からの出力を停止させて所定の惰性走行の持続時間t2だけハイブリッド車両1を惰性走行させる(出力停止状態)。そして、それ以降は、第2の断続運転条件が設定されている期間中、停止終了車速V1Lと別の加速終了車速V1H´との間で車速が変化するよう、原動機出力の断続制御が実行される。なお、ここで、通常断続運転時における加速終了車速V1Hと共振回避制御時における加速終了車速V1H´との差は、目標車速に応じて段階的にまたは無段階に、目標車速が大きくなるほどその差値(V1H−V1H´)が大きくなるよう可変設定してもよい。
【0100】
HVECU100は、さらに、ハイブリッド車両1の減速時に、走行駆動車輪2からハイブリッド駆動装置20に伝達される動力を、モータMG2により電力に変換させて、二次電池105に充電させる、いわゆる回生制動の制御を実行できるようになっている。
【0101】
また、HVECU100は、エンジン10およびモータMG1、MG2のうちいずれを原動機として動作させるかを、要求出力値、二次電池105の蓄電状態、EV走行選択スイッチ103やエコスイッチ104、さらには図示しないスポーツ走行モード選択スイッチのON/OFF状態等に応じて、決定するようになっている。したがって、ハイブリッド車両1は、エンジン10からの動力のみで走行するエンジン走行、エンジン10およびモータMG1、MG2を併用して走行するHV走行(ハイブリッド走行)、モータMG1、MG2のいずれかからの動力のみによって走行するEV走行(電気自動車走行)等のいずれかで走行できる。
【0102】
次に、作用について説明する。
【0103】
上述のように構成された本実施形態の車両制御装置においては、HVECU100によるハイブリッド駆動制御の制御周期毎に、図3および図4に概略の流れを示すような処理がそれぞれに実行される。また、これらの処理に先立って、ハイブリッド駆動制御の制御周期毎に、アクセルポジションセンサ101からの要求アクセル開度Accやその時点での車速その他の車両走行状態に関するセンサ情報を基に、目標車速が算出される。
【0104】
図3に示すのは、車両走行中に前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入るか否かに応じて、ハイブリッド駆動装置20の断続運転の条件を変更する処理を示している。
【0105】
この図3に示す条件変更処理においては、まず、車速がゼロでない状態、すなわち、ハイブリッド車両1が走行中であるか否かが判別される(ステップS11)。そして、走行中でなければ(ステップS11でNOの場合)、今回の処理は終了する。
【0106】
ハイブリッド車両1が走行中であれば(ステップS11でYESの場合)、ハイブリッド駆動装置20の出力を制御するためのパルス駆動制御ルーチンが開始されるとともに、アクセルポジションセンサ101等のセンサ情報を基に運転者の要求パワー(要求出力)が取得される(ステップS12、S13)。
【0107】
次いで、共振判定部111により、運転者の要求パワーに対応するハイブリッド駆動装置20の原動機出力[kW]および原動機の断続周期とハイブリッド車両1の現在の車速[km/h]とを基に、判定用データテーブルを参照した結果から、前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ってその特定の振動が悪化するか否かが判定される(ステップS14)。
【0108】
このとき、共振判定部111によって前記特定の振動の周波数がハイブリッド車両1の共振周波数内に入らず、共振周波数域から外れると判定されれば(ステップS14でNOの場合)、次いで、断続運転条件変更部112によって通常の断続運転条件である第1断続運転条件が設定される(ステップS15)。
【0109】
反対に、このとき、共振判定部111によって前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されれば(ステップS14でYESの場合)、次いで、断続運転条件変更部112によって、NV回避制御時の断続運転条件である第2の断続運転条件が設定される(ステップS16)。
【0110】
一方、このような車両走行モードに応じた条件変更処理と並行して、HVECU100では、図4に示すようなハイブリッド駆動装置20の断続運転制御が実行される。
【0111】
図4に示す断続運転制御においては、まず、目標車速が断続運転可能車速域内か否かが判別される(ステップS21)。このとき、目標車速が断続運転可能車速域から外れていれば(ステップS21でNOの場合)、今回の処理は終了する。
【0112】
目標車速が断続運転可能車速域内に入っていれば(ステップS21でYESの場合)、次いで、要求出力の一定時間内における変化量が予め設定された一定の変動幅内に入る状態、すなわち、運転者が略一定の駆動出力を要求する状態、または、要求出力が一定の変動幅内で漸増もしくは漸減する状態に該当するか否かが判別される(ステップS22)。
【0113】
この判別の結果、要求出力の一定時間内における変化量が一定の変動幅から外れる程度に大きければ(ステップS22でNOの場合)、次いで、非断続運転、すなわち通常の連続運転が開始される(ステップS23)。したがって、それまでに断続運転が実行されていれば、その断続運転が中断される。
【0114】
次いで、要求出力の一定時間内における変化量が一定の変動幅から増加側に外れる加速要求状態であるか否かが判別される(ステップS24)。
【0115】
このときの判別結果がYESであれば、ハイブリッド駆動装置20のモータMG2が駆動され、あるいはエンジン10およびモータMG2が駆動されて、ハイブリッド駆動装置20によりハイブリッド車両1を加速可能な駆動出力がなされる(ステップS25)。なお、エンジン10は、エンジン10を駆動した方がハイブリッド駆動装置20として高効率に走行駆動できるときや、二次電池105への充電が必要なときに始動される。また、モータMG1は、そのエンジン始動時に電動機モードで作動する一方、二次電池105への充電時には発電機モードで作動する。
【0116】
一方、ステップS24での判別結果がNOであれば、すなわち、要求出力の一定時間内における変化量が一定の変動幅から減少側(アクセルOFF側)に外れる状態となっていれば、ハイブリッド駆動装置20のモータMG2が停止され、あるいはエンジン10およびモータMG2が停止されて、ハイブリッド駆動装置20による駆動出力が停止される(ステップS26)。
【0117】
上述のようなハイブリッド駆動装置20の駆動出力または出力停止の処理とならなかった場合、すなわち、要求出力の一定時間内における変化量が前記一定の変動幅内に入り、運転者が略一定の駆動出力を要求する状態、または、要求出力が一定の変動幅内で漸増もしくは漸減する状態となった場合(ステップS22でYESの場合)、ハイブリッド駆動装置20の断続運転が開始される(ステップS27)。
【0118】
この断続運転の開始に際しては、まず、図2(a)または図2(b)に示す断続開始時点T0で、ハイブリッド駆動装置20の出力を停止させ、走行中のハイブリッド車両1を惰性走行に移行させて、その車速を制御速度範囲VR1の停止終了車速V1Lまで低下させた後に、ハイブリッド駆動装置20の出力(例えば、モータMG2の駆動)を開始させる。なお、このように最初に車速を低下させることなく、断続開始時点T0から即座にハイブリッド駆動装置20の出力を開始させることもできる。
【0119】
次いで、加速終了条件が成立したか否か、例えばハイブリッド駆動装置20からの走行駆動出力によってハイブリッド車両1が加速され、車速センサ102の検出車速が制御速度範囲VR1の加速終了車速V1Hに達したか否かが判別される(ステップS28)。この判別処理は、図2(a)、図2(b)に示す所定の加速走行の持続時間tm1、tm2が経過したか否かの判別であってもよいし、両判別のうちいずれかの判別結果に応じて次ステップに進んでもよい。
【0120】
この判別の結果、加速終了条件が成立していれば(ステップS28でYESの場合)、次いで、ハイブリッド駆動装置20のモータMG2が停止され、あるいはエンジン10およびモータMG2が停止されて、ハイブリッド駆動装置20による駆動出力が停止される(ステップS30)。このとき、ハイブリッド車両1は惰性走行に移行することになる。
【0121】
一方、加速終了条件が成立していなければ(ステップS28でNOの場合)、次いで、停止終了条件が成立したか否か、例えばハイブリッド駆動装置20からの走行駆動出力の停止によってハイブリッド車両1の車速が低下し、車速センサ102の検出車速が制御速度範囲VR1の停止終了車速V1Lに達したか否かが判別される(ステップS29)。この判別処理は、図2(a)、図2(b)に示す所定の惰性走行の持続時間t1またはt2が経過したか否かの判別であってもよいし、両判別のうちいずれかの判別結果に応じて次ステップに進んでもよい。
【0122】
この判別の結果、停止終了条件が成立していれば(ステップS29でYESの場合)、次いで、ハイブリッド駆動装置20のモータMG2が駆動され、あるいはエンジン10およびモータMG2が駆動されて、ハイブリッド駆動装置20による駆動出力が再開される(ステップS31)。このとき、ハイブリッド車両1は加速走行に移行することになる。
【0123】
一方、停止終了条件が成立していなければ(ステップS29でNOの場合)、次いで、ハイブリッド駆動装置20の現在の状態(駆動出力状態または出力停止状態)が保持される(ステップS32)。
【0124】
このように、本実施形態においては、図3に示す断続運転の条件変更処理と図4に示す断続運転制御の処理とが、並行して、HVECU100によるハイブリッド駆動制御の制御周期に対応して繰り返し実行される。したがって、車両走行中に前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ってその特定の振動が悪化すると判定されたときには、前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入るのを回避するように、即座に通常の第1の断続運転条件から共振回避のための第2の断続運転条件に変更されることになる。
【0125】
このように、本実施形態では、断続運転による低燃費走行のための原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域内に入ると共振判定部111で判定されると、その特定の振動の周波数が車両の共振周波数域から外れるように、断続運転条件変更部112により、原動機の断続運転の条件が通常の第1の断続運転条件とは異なる第2の断続運転条件に変更される。したがって、原動機の断続運転に起因する特定の振動や騒音が車両の共振周波数域で悪化することが、有効に抑制される。その結果、本実施形態の車両用制御装置30は、原動機の断続運転による低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができるものとなる。
【0126】
また、本実施形態においては、断続運転条件変更部112が、共振判定部111によって特定の振動の周波数が共振周波数域内に入ると判定されることを条件として、加速走行中における原動機の出力値と断続運転の実行期間中における原動機の出力の断続周期とのうち少なくとも一方、例えばモータMG2の出力の断続周期tm1、tm2を変更する。したがって、モータMG2の出力値を変えることなく、モータMG2の出力の変動周波数を車両の共振周波数域から外すことができる。
【0127】
さらに、本実施形態では、断続運転条件変更部112は、共振判定部111によって特定の振動の周波数が共振周波数域内に入ると判定されることを条件として、加速走行または惰性走行を少なくとも1回含むよう予め設定された共振回避期間(図2(b)中の回避期間)に、断続運転の条件を通常とは異なる条件に変更するので、低燃費走行が可能な運転条件で実行される断続運転中の共振回避期間を短時間に抑えて、エネルギ消費率(単位エネルギ消費量当りの走行距離)を抑えることができる。
【0128】
加えて、本実施形態では、断続運転条件変更部112は、共振判定部111によって特定の振動の周波数が共振周波数域内に入ると判定されることを条件として、断続運転の実行期間中における原動機の出力の断続周期を通常の断続周期(tm1+t1)より短い断続周期(tm2+t2)に短縮するので、断続運転による車速変化の周期が短くなることから、共振回避制御のための断続運転条件の変化による乗り心地の低下が生じ難い。
【0129】
また、本実施形態では、断続運転条件変更部112が、共振判定部111によって特定の振動の周波数が共振周波数域内に入ると判定されることを条件として、加速終了車速V1Hと停止終了車速V1Lとのうち少なくとも一方を、特定の振動の周波数が共振周波数域から外れるように変更する。したがって、出力の変化の有無に関係なく、加速終了車速V1Hと停止終了車速V1Lとのうち少なくとも一方を変更するだけで、原動機の出力変動に伴う特定の振動の周波数を共振周波数域から外すことができ、簡単な制御で共振回避制御が実行できることとなる。
【0130】
殊に、断続運転条件変更部112は、共振判定部111によって特定の振動の周波数が共振周波数域内に入ると判定されることを条件に、加速終了車速を通常の加速終了車速V1Hよりも低い加速終了車速V1H´に変更するので、共振回避制御時に車速変化の周期が短くなることになり、断続運転条件の変化による乗り心地の低下が生じ難い。
【0131】
また、断続運転条件変更部112は、第1の断続運転条件と第2の断続運転条件とを読み出し可能に記憶した条件記憶メモリ112aを有しているので、原動機の出力変動周波数がハイブリッド車両1の共振周波数域内に入るときに断続運転条件を迅速に切り替えて的確な共振回避制御を実行することができる。
【0132】
このように、本実施形態においては、ハイブリッド駆動装置20の断続運転による低燃費走行を実現するとともに、その低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができ、ハイブリッド車両1の乗り心地を向上させることのできる車両用制御装置30を提供することができる。
【0133】
なお、本実施形態では、断続運転条件変更部112は、共振判定部111によって特定の振動の周波数が共振周波数域内に入ると判定されることを条件として、加速終了車速を通常の加速終了車速V1Hよりも低速となる別の加速終了車速V1H´に変更するものであったが、停止終了車速を通常の停止終了車速V1Lよりも高い車速となる別の停止終了車速に変更するものであってもよい。その場合も、共振回避制御時に車速変化の周期が短くなることになり、断続運転条件の変化による乗り心地の低下が生じ難い。
【0134】
また、上述の第1実施形態では、断続運転条件変更部112の条件記憶メモリ112aに格納される第1の断続運転条件と第2の断続運転条件は、図2(a)および図2(b)に例示するそれぞれの条件に特定したが、断続運転条件変更部112の条件記憶メモリ112aに格納される第1の断続運転条件と第2の断続運転条件は、車速その他の他の走行条件、例えば路面の傾斜度(例えば、登坂路、下り坂)や、路面の状況(例えばウェット路面、雪道、氷結路、アスファルト、砂利道等)に応じて異なるそれぞれ複数の第1の断続運転条件と第2の断続運転条件として設定され、車速やブレーキ制御やトラクション制御その他の制御機能状把握される路面状況に応じて最適な断続運転条件を選択できるようにしてもよい。
【0135】
(第2実施形態)
図5(a)および図5(b)は、本発明の第2実施形態に係る車両用制御装置における異なる2つの断続運転の条件を対比して示すタイミングチャートである。
【0136】
なお、以下に説明する各実施形態の車両用制御装置は、上述の第1実施形態と略同様な構成を有しており、そのハイブリッド駆動装置20の断続運転の条件のみが上述の第1実施形態とは異なるものである。したがって、以下の説明においては、第1実施形態の車両用制御装置と同一または類似する構成については、図1中に示した第1実施形態中の対応する構成要素の符号を用いて説明する。
【0137】
図5(a)は、第2実施形態に係る車両用制御装置における第1の断続運転条件を示しており、図5(b)は、その車両用制御装置での共振回避制御時に適用される第2の断続運転条件を示している。
【0138】
本実施形態の車両用制御装置30では、共振判定部111によって特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されず、その共振周波数域から外れると判定されると、断続運転条件変更部112によって、第1の断続運転条件が設定される。一方、共振判定部111によって特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されると、断続運転条件変更部112によって、第1の断続運転条件から第2の断続運転条件への条件変更がなされることで、共振回避制御がなされる。
【0139】
すなわち、図5(a)に示すように、第1の断続運転条件の下では、HVECU100は、断続開始時点T0から、第1実施形態の通常断続運転時と同様に、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR1を設定する。また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速を制御速度範囲VR1の停止終了車速V1Lまで低下させる。そして、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm1の間、ハイブリッド車両1を加速させる(駆動出力状態)。さらに、その加速によって車速が加速終了車速V1Hに達すると、モータMG2からの出力を停止させて所定の惰性走行の持続時間t1だけハイブリッド車両1を惰性走行させる(出力停止状態)。
【0140】
HVECU100は、また、目標車速が断続運転可能車速域内に入っており、かつ、要求出力が略一定に保持されている期間中は、ハイブリッド駆動装置20を上述のような断続運転状態にする。したがって、ハイブリッド駆動装置20の電力消費量や燃料消費量は少なくて済み、ハイブリッド車両1の低燃費走行が可能となる。
【0141】
一方、図5(b)に示すように、第2の断続運転条件の下では、HVECU100は、モータMG2(あるいはモータMG2およびエンジン10)の出力値を、通常走行モード時の出力値Pm1から、この出力値Pm1に対し所定の増加率(>1)をかけて増加させた出力値Pm2に変更する。
【0142】
HVECU100は、また、出力値Pm2を設定するに際してモータMG2の基準損失マップやエンジン10の機関性能マップ等として記憶格納された情報を参照して、出力値Pm2を前記増加率に対応して運転者等が大きな車速変化を感じない程度の出力差の範囲内で探索し、設定するようになっている。
【0143】
本実施形態では、原動機出力が出力値Pm1から出力値Pm2に変更されると、通常と同様の断続運転中の制御車速範囲VR2(=VR1)の上限車速V1Hに達するまでの加速時間が時間tm1からそれより短い時間tm2に変化するので、原動機の断続周期を変化させてその出力の変動周波数を車両の共振周波数域から外すことができる。
【0144】
また、本実施形態では、共振判定部111によって特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されることを条件として、通常断続運転時の出力値Pm1から共振回避制御時の出力値Pm2に増加させる。したがって、加速走行中におけるハイブリッド駆動装置20のモータMG2等の出力が増加されてハイブリッド駆動装置20のモータMG2等のエネルギ効率が高まる。しかも、断続運転中の加速走行期間内における加速度が低下することがなく、共振回避制御のための断続運転条件の変化による乗り心地の低下が生じ難い。
【0145】
本実施形態においても、ハイブリッド駆動装置20の断続運転による低燃費走行を実現するとともに、その低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができ、ハイブリッド車両1の乗り心地を向上させることのできる車両用制御装置30を提供することができる。
【0146】
なお、HVECU100は、車速が加速終了車速V1Hに達したか否かによって加速走行の終了タイミングを特定するのに代えて、断続運転の実行期間中における加速走行の持続時間を、通常断続運転時の第1の断続運転条件の一部である加速走行の持続時間tm1から、この持続時間tm1に対し所定の減少率(<1)をかけて減少させた加速走行の持続時間tm2に変更し、加速走行がこの持続時間tm2に達したか否によって加速走行の終了タイミングを特定するようにしてもよい。
【0147】
(第3実施形態)
図6(a)および図6(b)は、本発明の第3実施形態に係る車両用制御装置における異なる2つの断続運転の条件を対比して示すタイミングチャートであり、図6(a)は第1の断続運転条件を、図8(b)は第2の断続運転条件を、それぞれ示している。
【0148】
図6(a)に示す第1の断続運転条件の下では、HVECU100は、断続開始時点T0から、第1、第2実施形態の通常断続運転時と同様に、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR1を設定する。また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速を停止終了車速V1Lまで低下させる。そして、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm1の間、ハイブリッド車両1を加速させる(駆動出力状態)。さらに、その加速によって車速が加速終了車速V1Hに達すると、モータMG2からの出力を停止させて所定の惰性走行の持続時間t1だけハイブリッド車両1を惰性走行させる(出力停止状態)。
【0149】
HVECU100は、また、目標車速が断続運転可能車速域内に入っており、かつ、要求出力が略一定に保持されている期間中は、ハイブリッド駆動装置20を上述のような断続運転状態にする。したがって、ハイブリッド駆動装置20の電力消費量や燃料消費量は少なくて済み、ハイブリッド車両1の低燃費走行が可能となる。
【0150】
一方、図6(b)に示す第2の断続運転条件の下では、HVECU100は、断続開始時点T0から、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR2を設定する。ここで、制御速度範囲VR2は、制御速度範囲VR1の停止終了車速V1Lに対し高車速側にずれた別の停止終了車速V1L´と制御速度範囲VR1の加速終了車速V1Hとの間の車速変動範囲として設定される。すなわち、制御速度範囲VR2は、制御速度範囲VR1とは異なる速度制御範囲として設定される。また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速をまずは制御速度範囲VR1の停止終了車速V1Lまで低下させ、次いで、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm2の間、ハイブリッド車両1を加速させる(駆動出力状態)。そして、その加速によって車速が加速終了車速V1Hに達すると、共振回避期間となり、最初に、モータMG2からの出力を停止させて所定の惰性走行の持続時間t2だけハイブリッド車両1を惰性走行させる(出力停止状態)。
【0151】
次いで、車速が制御速度範囲VR1の別の停止終了車速V1L´まで低下すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm2の間、ハイブリッド車両1を加速させる(駆動出力状態)。
【0152】
本実施形態では、このように、共振判定部111によって特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されることを条件として、通常断続運転時におけるハイブリッド駆動装置20のモータMG2等の出力の断続周期(tm1+t1)からそれより短時間となる共振回避制御時の断続周期(tm2+t2<tm1+t1)に変更される。したがって、モータMG2等の出力レベルの変化がなく、しかも、共振回避制御期間内における断続周期は短くなることから、共振回避制御のための断続運転条件の変化による乗り心地の低下が生じ難い。
【0153】
本実施形態においても、ハイブリッド駆動装置20の断続運転による低燃費走行を実現するとともに、その低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができ、ハイブリッド車両1の乗り心地を向上させることのできる車両用制御装置30を提供することができる。
【0154】
(第4実施形態)
図7(a)および図7(b)は、本発明の第4実施形態に係る車両用制御装置における異なる2つの断続運転の条件を対比して示すタイミングチャートであり、図7(a)は第1の断続運転条件を、図7(b)は第2の断続運転条件を、それぞれ示している。
【0155】
図7(a)に示す第1の断続運転条件の下では、HVECU100は、断続開始時点T0から、上述の各実施形態の通常断続運転時と同様に、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR1を設定する。また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速を停止終了車速V1Lまで低下させる。そして、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm1の間、ハイブリッド車両1を加速させる(駆動出力状態)。さらに、その加速によって車速が加速終了車速V1Hに達すると、モータMG2からの出力を停止させて所定の惰性走行の持続時間t1だけハイブリッド車両1を惰性走行させる(出力停止状態)。
【0156】
HVECU100は、また、目標車速が断続運転可能車速域内に入っており、かつ、要求出力が略一定に保持されている期間中は、ハイブリッド駆動装置20を上述のような断続運転状態にする。したがって、ハイブリッド駆動装置20の電力消費量や燃料消費量は少なくて済み、ハイブリッド車両1の低燃費走行が可能となる。
【0157】
一方、図7(b)に示す第2の断続運転条件の下では、HVECU100は、断続開始時点T0から、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR1、VR2をそれぞれに設定する。ここで、制御速度範囲VR2は、制御速度範囲VR1の加速終了車速V1Hに対し低車速側にずれた別の加速終了車速V1H´と制御速度範囲VR1の停止終了車速V1Lとの間の車速変動範囲として設定される。すなわち、両制御速度範囲VR1、VR2は、互いに異なる速度制御範囲として設定される。
【0158】
また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速をまずは制御速度範囲VR1の停止終了車速V1Lまで低下させ、次いで、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm1の間、ハイブリッド車両1を加速させる(駆動出力状態)。そして、その加速によって車速が加速終了車速V1Hに達すると、モータMG2からの出力を停止させて所定の惰性走行の持続時間t1だけハイブリッド車両1を惰性走行させる(出力停止状態)。
【0159】
次いで、車速が制御速度範囲VR1の停止終了車速V1Lに低下すると、共振回避期間となり、最初に、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm2の間、または、車速センサ102の検出車速が別の加速終了車速V1H´に達するまでの間、ハイブリッド車両1を加速させる(駆動出力状態)。
【0160】
そして、車速センサ102の検出車速が加速終了車速V1H´に達すると、モータMG2による加速駆動状態を解除して、所定の惰性走行の持続時間t2だけハイブリッド車両1を惰性走行させる。
【0161】
次いで、車速が制御速度範囲VR1の停止終了車速V1Lに低下すると、今度は、モータMG2の出力を共振回避期間以外の出力値Pm1に所定の減少率をかけた共振回避期間内の出力値Pm3に低下させて、所定の加速走行の持続時間tm3の間、または、車速センサ102の検出車速が制御速度範囲VR1の加速終了車速V1Hに達するまでの間、ハイブリッド車両1を加速させる。この場合の加速走行の持続時間tm3や、共振回避期間内の出力値Pm3は、この共振回避期間内の出力値Pm3での加速の終了時点において、それまでの共振回避期間外の第1の断続運転条件下での断続運転が継続されていた場合と同位相の車速変化に復帰させるように設定される。
【0162】
本実施形態では、このように、共振判定部111によって特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されることを条件として、通常断続運転時におけるハイブリッド駆動装置20のモータMG2等の出力の断続周期(tm1+t1)から一時的な共振回避期間内においてのみ、共振回避制御時の断続周期(tm2+t2<tm1+t1)に変更され、次いで、元の車速変動と同位相の車速変動となるような断続運転に復帰させる。したがって、断続運転による車速変動の位相のずれがなく、しかも、共振回避制御期間内における断続周期はほぼ変化しないことになるから、共振回避制御のための断続運転条件の変化による乗り心地の低下が生じ難い。
【0163】
本実施形態においても、ハイブリッド駆動装置20の断続運転による低燃費走行を実現するとともに、その低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができ、ハイブリッド車両1の乗り心地を向上させることのできる車両用制御装置30を提供することができる。
【0164】
(第5実施形態)
図8(a)および図8(b)は、本発明の第5実施形態に係る車両用制御装置における異なる2つの断続運転の条件を対比して示すタイミングチャートであり、図8(a)は第1の断続運転条件を、図8(b)は第2の断続運転条件を、それぞれ示している。
【0165】
図8(a)に示す第1の断続運転条件の下では、HVECU100は、第4実施形態の場合と同様に、通常の断続運転制御を実行する。したがって、ハイブリッド駆動装置20の電力消費量や燃料消費量は少なくて済み、ハイブリッド車両1の低燃費走行が可能となる。
【0166】
一方、図8(b)に示す第2の断続運転条件の下では、HVECU100は、断続開始時点T0から、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR1、VR2、VR3をそれぞれに設定する。ここで、制御速度範囲VR2、VR3は、それぞれ制御速度範囲VR1の停止終了車速V1Lに対し高車速側にずれた別の停止終了車速V1La、V1Lbと制御速度範囲VR1の加速終了車速V1Hとの間の車速変動範囲として設定される。すなわち、3つの制御速度範囲VR1、VR2、VR3は、互いに異なる速度制御範囲として設定され、それらのうち制御速度範囲VR2は、制御速度範囲VR1、VR3のどちらよりも狭い制御速度範囲に設定されている。
【0167】
また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速をまずは制御速度範囲VR1の停止終了車速V1Lまで低下させ、次いで、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm1の間、ハイブリッド車両1を加速させる(駆動出力状態)。そして、その加速によって車速が加速終了車速V1Hに達すると、モータMG2からの出力を停止させて所定の惰性走行の持続時間t2だけハイブリッド車両1を惰性走行させる(出力停止状態)。
【0168】
次いで、共振回避期間に入り、車速が制御速度範囲VR2の停止終了車速V1Laまで低下すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm2の間、または、車速センサ102の検出車速が加速終了車速V1Hに達するまでの間、ハイブリッド車両1を加速させる(駆動出力状態)。
【0169】
そして、その加速によって車速が加速終了車速V1Hに達すると、モータMG2からの出力を停止させて、所定の惰性走行の持続時間t3だけハイブリッド車両1を惰性走行させ、車速が制御速度範囲VR3の停止終了車速V1Lbまで低下すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を再度出力させる。それ以降は、第1の断続運転条件下と同様に、車速が制御速度範囲VR1の範囲内で変化するように制御される。
【0170】
本実施形態では、このように、共振判定部111によって特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されることを条件として、通常断続運転時におけるハイブリッド駆動装置20のモータMG2等の出力の断続周期(tm1+t1)から一時的な共振回避期間内においてのみ、共振回避制御時の断続周期((tm2+t2)または(tm3+t3)<tm1+t1)に変更される。したがって、断続運転による車速変動の位相のずれがなく、しかも、共振回避制御期間内に通常の断続運転時の制御速度範囲VR1から外れるような車速変化がなく、共振回避制御のための断続運転条件の変化による乗り心地の低下が生じ難い。
【0171】
本実施形態においても、ハイブリッド駆動装置20の断続運転による低燃費走行を実現するとともに、その低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができ、ハイブリッド車両1の乗り心地を向上させることのできる車両用制御装置30を提供することができる。
【0172】
なお、上述の各実施形態においては、モータMG1、MG2およびエンジン10のうち少なくとも1つからの動力を基に走行駆動力を発生させるハイブリッド駆動装置20を備えていたが、少なくとも1つの電動機(電動モータ)を走行駆動用の原動機として備えた車両であれば、電気自動車であってもハイブリッド車両であっても、本発明を適用することができる。また、動力伝達機構の一部を構成する減速機構70は、図1に示すものに限らず、他のギヤ構成を採ることができることは勿論であるし、変速機を含んで構成されてもよい。
【0173】
また、モータMG1、MG2よびエンジン10のうちいずれか1つまたは複数の原動機の組合せであるかによって、共振回避制御を、その原動機の種類(組合せを含む)に応じて選択できるように複数組の第1の断続運転条件および第2の断続運転条件を設定することもできる。
【0174】
以上説明したように、本発明に係る車両用制御装置は、断続運転のための原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域内に入ると判定されると、その特定の振動の周波数が車両の共振周波数域から外れるように、原動機の断続運転条件が通常とは異なる条件に変更される。したがって、原動機の断続運転に起因する振動や騒音が車両の共振周波数域で悪化することを有効に抑制して、原動機の断続運転による低燃費走行中にその断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができる車両用制御装置を提供することができるという効果を奏する。このような本発明は、走行駆動用の原動機として少なくとも電動機を備えた車両に装備される車両用制御装置、特にその原動機のエネルギ消費量を抑える制御を実行する車両用制御装置全般に有用である。
【符号の説明】
【0175】
1 ハイブリッド車両(車両)
2 走行駆動車輪(駆動輪)
3 ドライブシャフト(駆動軸)
10 エンジン(内燃機関)
20 ハイブリッド駆動装置
30 車両用制御装置
40 動力分割統合機構(動力伝達機構)
40a 第1の遊星歯車機構
40c 第2の遊星歯車機構
49 カウンタドライブギヤ
51、52 ロータ
53、54 ステータ
60 モータECU
70 減速機構(動力伝達機構)
80 差動機構(動力伝達機構)
100 HVECU(ハイブリッド駆動システム制御用の電子制御ユニット)
101 アクセルポジションセンサ
102 車速センサ
103 EV走行選択スイッチ(電気自動車走行選択スイッチ)
105 二次電池(ハイブリッド駆動用のバッテリ)
106 昇圧コンバータ
107 電池ECU
111 共振判定部
112 断続運転条件変更部
112a 条件記憶メモリ
MG1、MG2 モータ(モータジェネレータ、電動機)
Pm1、Pm2、Pm3 出力値
t1、t2、t3 惰性走行の持続時間
tm1、tm2、tm3 加速走行の持続時間
V1H 加速終了車速(上限車速)
V1H´ 別の加速終了車速(上限車速)
V1L 停止終了車速(下限車速)
V1L´、V1La、V1Lb 別の停止終了車速(下限車速)
V1S 目標車速
VR1、VR2、VR3 制御速度範囲(車速変動範囲)
【技術分野】
【0001】
本発明は、走行駆動用の原動機(駆動力源)として少なくとも電動機を備えた車両に装備される車両用制御装置に関し、特にその原動機のエネルギ消費量を抑える制御を実行する車両用制御装置に関する。
【背景技術】
【0002】
近時、走行駆動用の原動機として少なくとも電動機を備えた車両、例えば電動機を搭載した電気自動車や、電動機と内燃機関を搭載したハイブリッド電気自動車(以下、ハイブリッド車両という)が、普及して来ている。また、ハイブリッド車両には、発電機と電動機を搭載したものや、発電可能な電動機(発電電動機)を登載したものがある。
【0003】
このような車両においては、アクセルペダル等による運転者の要求パワー(要求出力)に応じて、さらには安全性や運転負荷の軽減、エネルギ消費量の低減等のために付加される各種制御装置からの要求に従って、電動機の出力、発電機の発電量、内燃機関の出力等を制御して、走行駆動車輪側への伝達動力(駆動トルクおよび回転数)を変化させるようになっている。
【0004】
従来のこの種の車両用制御装置としては、所定条件下(例えば、アクセルペダルからの加速要求がされないアクセルOFF状態下)で、内燃機関を断続運転させ、設定車速域内で内燃機関による走行駆動で車両を加速する加速走行と内燃機関による走行駆動を停止して車両を惰性(慣性)で走行させる惰性走行とを繰り返すことで、内燃機関を連続運連させて走行するよりも低燃費で走行できるようにしたものが知られている(例えば、特許文献1参照)。この装置では、低燃費走行期間における加速走行の開始直後や停止直前のタイミングで、加速走行の途中期間より走行駆動動力を低下させるとともに充電電力を増加させて車両加速度の変化を滑らかにしている。
【0005】
一方、原動機からの回転動力により走行駆動される車両では、原動機の出力トルクの変動により走行駆動系に振動が生じ、その振動数が車両に固有な共振周波数域に重なると、振動・騒音が悪化するため、それを抑制する必要がある。
【0006】
そこで、例えば内燃機関のクランキング中の回転数(回転速度)の上昇度合いが反力トルクの増加により低下する時点におけるその回転数が車両の共振域に重なるのを防止すべく、クランキングトルクを調整するものが知られている(例えば、特許文献2参照)。
【0007】
また、電動機の出力トルクと内燃機関のフリクショントルクとが釣り合うときの機関回転数が車両の共振周波数域内に入ると推定されると、その共振周波数域から所定回転数分だけ低い回転数で内燃機関をクランキングするように、発電電動機のトルクを調整するものも知られている(例えば、特許文献3参照)。
【0008】
さらに、内燃機関を停止させるために切換クラッチ等が解放され、その機関回転数が変速機側回転要素の回転数に拘束されない自由回転状態になったとき、電動機を用いて機関回転数を共振発生の抑制が可能な回転速度まで低下させることで、エンジン停止性を向上させるようにしたものも知られている(例えば、特許文献4参照)。
【先行技術文献】
【特許文献】
【0009】
【特許文献1】特開2010−6309号公報
【特許文献2】特開2009−215958号公報
【特許文献3】特開2008−25375号公報
【特許文献4】特開2006−46541号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
しかしながら、原動機の断続運転による低燃費走行の制御を行うようにした従来の車両用制御装置にあっては、原動機の断続運転による低燃費走行中に、その断続運転に起因して振動・騒音が生じてしまう可能性があった。
【0011】
すなわち、原動機の断続運転による低燃費走行中には、原動機の出力である走行駆動用の回転動力が比較的長い周期で断続され、車速が設定速度域内で繰り返し増加および減少するため、例えば原動機から出力される動力を走行駆動車輪まで伝達する動力伝達機構において周波数の低いねじり振動や騒音が生じたり、原動機となる電動機のスイッチングの繰り返しに起因する騒音が生じたりする場合がある。そして、その場合、長周期の騒音や振動の周波数が車両の共振周波数と重なると、車両の乗り心地を害する程度にその振動・騒音レベルが高くなってしまう。
【0012】
一方、原動機の出力トルクの変動周波数が車両の共振周波数域に重ならないようにする振動抑制制御を行う車両用制御装置にあっては、単に原動機の出力トルクや負荷トルクを調整する程度の制御となっていたため、原動機の断続運転による長周期の車速変動に伴って生じる振動や騒音を有効に抑制できなかった。
【0013】
そこで、本発明は、原動機の断続運転による低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができる車両用制御装置を提供することを目的とする。
【課題を解決するための手段】
【0014】
本発明に係る車両用制御装置は、上記目的達成のため、(1)要求出力に応じて制御される原動機と該原動機の出力に応じた走行駆動力を発生させる動力伝達機構とを備えるとともに前記原動機が少なくとも電動機で構成されている車両に装備され、前記要求出力が予め設定された変動幅内に保持されていることを条件に、前記原動機の出力を断続させる断続運転を実行して、前記車両を前記走行駆動力で加速する加速走行と前記車両を惰性で走行させる惰性走行とを交互に実行させる車両用制御装置であって、前記断続運転のための前記原動機の出力変動に伴う特定の振動の周波数が前記車両の共振周波数域内に入るか否かを判定する共振判定部と、該共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件に、前記特定の振動の周波数が前記共振周波数域から外れるように前記断続運転の条件を通常とは異なる条件に変更する断続運転条件変更部と、を備えたことを特徴とする。
【0015】
この構成により、断続運転のための原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域内に入ると共振判定部で判定されると、その特定の振動の周波数が車両の共振周波数域から外れるように、断続運転条件変更部により、原動機の断続運転の条件が通常とは異なる条件に変更される。したがって、原動機の断続運転に起因する振動や騒音が車両の共振周波数域で悪化することが、有効に抑制される。その結果、原動機の断続運転による低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができる車両用制御装置となる。
【0016】
なお、ここで、要求出力とは、運転者のアクセルペダル操作量等に応じた要求出力、もしくはクルーズコントロール等の他の走行制御機能から要求される要求出力、またはそのような複数の要求出力に基づいて算出される要求出力である。
【0017】
本発明に係る車両用制御装置においては、好ましくは、(2)前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速走行中における前記原動機の出力値と前記断続運転の実行期間中における前記原動機の出力の断続周期とのうち少なくとも一方を変更するものである。
【0018】
この構成により、例えば原動機の出力値が変更されると、断続運転中の車速変動範囲の上限車速に達するまでの加速時間が変化するので、原動機の断続周期を変化させてその出力の変動周波数を車両の共振周波数域から外すことができる。また、原動機の出力値を変えることなく、原動機の断続周期を変化させても、その出力の変動周波数を車両の共振周波数域から外すことができる。
【0019】
本発明に係る車両用制御装置においては、また、(3)前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速走行または前記惰性走行を少なくとも1回含むよう予め設定された共振回避期間内に、前記断続運転の条件を前記通常とは異なる条件に変更することが好ましい。
【0020】
この場合、低燃費条件で実行される断続運転中の共振回避期間を短く抑え、エネルギ消費率(単位エネルギ消費量当りの走行距離)を抑えることができる。
【0021】
上記(2)または(3)の構成を有する車両用制御装置においては、(4)前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速走行中の前記原動機の出力値を通常の出力値より増加させることが好ましい。
【0022】
この場合、断続運転中の加速走行期間内における加速度が低下することがなく、共振回避制御のための断続運転条件の変化による乗り心地の低下が生じ難い。
【0023】
上記(2)〜(4)のいずれかの構成を有する車両用制御装置においては、(5)前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記断続運転の実行期間中における前記原動機の出力の断続周期を通常の断続周期より短くすることが好ましい。
【0024】
この場合、断続運転による車速変化の周期も短くなるので、共振回避制御のための断続運転条件の変化による乗り心地の低下が生じ難い。
【0025】
本発明に係る車両用制御装置においては、(6)前記断続運転の条件が、前記断続運転の実行期間中に前記加速走行毎の前記原動機の運転状態を終了させる加速終了車速と、前記断続運転の実行期間中に前記惰性走行毎の前記原動機の停止状態を終了させる停止終了車速と、のうち少なくとも一方を含み、前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速終了車速と前記停止終了車速とのうち少なくとも一方を、前記特定の振動の周波数が前記共振周波数域から外れるように変更することが好ましい。
【0026】
この構成により、出力の変化の有無に関係なく、加速終了車速と停止終了車速とのうち少なくとも一方を変更するだけで、原動機の出力変動に伴う特定の振動の周波数を共振周波数域から外すことができ、簡単な制御で共振回避可能となる。
【0027】
上記(6)を備えた車両用制御装置においては、(7)前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速終了車速を通常の加速終了車速よりも低い車速に変更するものであってもよい。
【0028】
この場合、共振回避制御時に車速変化の周期が短くなることになり、断続運転条件の変化による乗り心地の低下が生じ難い。
【0029】
上記(6)または(7)を備えた車両用制御装置においては、(8)前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記停止終了車速を通常の停止終了車速よりも高い車速に変更するものであってもよい。
【0030】
この場合も、共振回避制御時に車速変化の周期が短くなることになり、断続運転条件の変化による乗り心地の低下が生じ難い。
【0031】
本発明に係る車両用制御装置においては、(9)前記断続運転条件変更部は、前記断続運転の条件として、前記特定の振動の周波数が前記共振周波数域から外れる通常時に設定される第1の断続運転条件と、前記特定の振動の周波数が前記共振周波数域内に入るときに設定される第2の断続運転条件と、を読み出し可能に記憶した条件記憶メモリを有しているのがよい。この構成により、原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域内に入るときに断続運転条件を迅速に切り替えて的確な共振回避制御を実行することができる。
【0032】
なお、車速や騒音環境の変化に対する運転者や他の乗員の感覚的な許容範囲は、高速側になるほど広くなる傾向があるから、その範囲内で高車速になるほど加速終了車速と停止終了車速の間の車速変動幅が拡大され得る。また、断続運転の条件は、車速に応じて異なる複数の条件に設定されるものに限らず、他の走行条件、例えば路面の傾斜度(例えば、登坂路、下り坂)や、路面の状況(例えばウェット路面、雪道、氷結路、アスファルト、砂利道等)に応じて異なる条件に設定されてもよい。
【発明の効果】
【0033】
本発明によれば、断続運転のための原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域内に入ると判定されると、その特定の振動の周波数が車両の共振周波数域から外れるように、原動機の断続運転条件が通常とは異なる条件に変更されるので、原動機の断続運転に起因する振動や騒音が車両の共振周波数域で悪化することを有効に抑制して、原動機の断続運転による低燃費走行中にその断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができる車両用制御装置を提供することができる。
【図面の簡単な説明】
【0034】
【図1】本発明の第1実施形態に係る車両用制御装置を備えたハイブリッド車両の走行駆動システムの概略構成図である。
【図2】本発明の第1実施形態に係る車両用制御装置における原動機の断続運転の条件を示すタイミングチャートであり、図2(a)は原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域から外れる通常時に適用される第1の断続運転条件を示し、図2(b)は特定の振動の周波数を車両の共振周波数域から外す共振回避制御時に適用される第2の断続運転条件を示している。
【図3】本発明の第1実施形態に係る車両用制御装置において実行される断続運転条件の変更処理手順を示すフローチャートである。
【図4】本発明の第1実施形態に係る車両用制御装置において実行される断続運転の概略の手順を示すフローチャートである。
【図5】本発明の第2実施形態に係る車両用制御装置における原動機の断続運転の条件を示すタイミングチャートであり、図5(a)は原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域から外れる通常時に適用される第1の断続運転条件を示し、図5(b)は特定の振動の周波数を車両の共振周波数域から外す共振回避制御時に適用される第2の断続運転条件を示している。
【図6】本発明の第3実施形態に係る車両用制御装置における原動機の断続運転の条件を示すタイミングチャートであり、図6(a)は原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域から外れる通常時に適用される第1の断続運転条件を示し、図6(b)は特定の振動の周波数を車両の共振周波数域から外す共振回避制御時に適用される第2の断続運転条件を示している。
【図7】本発明の第4実施形態に係る車両用制御装置における原動機の断続運転の条件を示すタイミングチャートであり、図5(a)は原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域から外れる通常時に適用される第1の断続運転条件を示し、図5(b)は特定の振動の周波数を車両の共振周波数域から外す共振回避制御時に適用される第2の断続運転条件を示している。
【図8】本発明の第5実施形態に係る車両用制御装置における原動機の断続運転の条件を示すタイミングチャートであり、図8(a)は原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域から外れる通常時に適用される第1の断続運転条件を示し、図8(b)は特定の振動の周波数を車両の共振周波数域から外す共振回避制御時に適用される第2の断続運転条件を示している。
【発明を実施するための形態】
【0035】
以下、本発明の好ましい実施形態について、図面を参照しつつ説明する。
【0036】
(第1実施形態)
図1ないし図4に示す本発明の第1実施形態を示している。なお、本実施形態は、本発明に係る車両用制御装置をハイブリッド車両の走行駆動システムに装備したものである。ただし、本発明は、走行駆動用の動力源となる原動機を電動機のみで構成した電気自動車や他の方式のハイブリッド車両(例えば、シリーズタイプのハイブリッド車両)であってもよいことはいうまでもない。
【0037】
図1に示すように、本実施形態の車両用制御装置を装備するハイブリッド車両1は、要求出力に応じて制御される走行駆動用の原動機として、内燃機関であるエンジン10と、それぞれ発電可能な電動機であるモータジェネレータ(以下、単にモータという)MG1、MG2とを含む、ハイブリッド駆動装置20を備えている。
【0038】
このハイブリッド駆動装置20は、車両用制御装置30によって制御され、エンジン10およびモータMG1、MG2のうち少なくとも1つから出力される動力に応じて、ハイブリッド車両1を走行駆動する走行駆動力を発生させることができる。
【0039】
エンジン10は、多気筒の内燃機関、例えば4サイクルのガソリンエンジンである。また、モータMG1、MG2は、それぞれ変速機ケース5(詳細図示せず)の内部に収納されており、変速機ケース5はエンジン10に締結されている。
【0040】
モータMG1、MG2は、それぞれ永久磁石同期発電電動機として構成され、供給される電力を回転動力に変換して出力する電動機の機能と、入力された回転動力を電力に変換して出力する発電機の機能とを併有している。また、モータMG1は主に発電機として用いられ、モータMG2は主に電動機として用いられるようになっている。
【0041】
具体的には、モータMG1は、複数の永久磁石をそれぞれ略V字型に配置してリラクタンストルクを利用可能にした内部磁石型のロータ51と、3相コイルが巻回されたステータ53とを有しており、ステータ53がインバータ61から交流電力の供給を受けて回転磁界を形成するとき、その回転磁界によってロータ51が回転するようになっている。同様に、モータMG2は、複数の永久磁石をそれぞれ略V字型に配置してリラクタンストルクを利用可能にした内部磁石型のロータ52と、3相コイルが巻回されたステータ54とを有しており、ステータ54がインバータ62から交流電力の供給を受けて回転磁界を形成するとき、その回転磁界によってロータ52が回転するようになっている。また、モータMG1、MG2には、それぞれロータ51、52の回転角位置を検出する図示しないレゾルバが設けられている。
【0042】
ハイブリッド駆動装置20は、エンジン10およびモータMG1、MG2のうち少なくとも1つから出力される回転動力を、動力分割統合機構40および減速機構70を介して差動機構80に伝達し、差動機構80から左右のドライブシャフト3を介して左右の走行駆動車輪2に差動可能に動力伝達できる。そして、左右の走行駆動車輪2は、その伝達動力に応じてハイブリッド車両1の走行駆動力を発生させるようになっている。
【0043】
すなわち、ハイブリッド駆動装置20は、エンジン10およびモータMG1、MG2に加え、原動機出力に応じた走行駆動力を発生させる動力伝達機構として、動力分割統合機構40、減速機構70および差動機構80を含んだ構成となっている。
【0044】
動力分割統合機構40は、第1および第2の遊星歯車機構40a、40cと、両遊星歯車機構40a、40cに共通の出力要素40bと、によって構成されており、エンジン10からの動力を走行駆動用と発電用の動力に分割したり、エンジン10およびモータMG1、MG2のうちいずれか1つまたは複数からの原動機出力を統合して出力したりする機能を有している。
【0045】
第1の遊星歯車機構40aは、エンジン10からの回転動力を、発電機モードのモータMG1を駆動する動力と、ハイブリッド車両1の走行駆動のために減速機構70側に出力される動力とに分割することができる動力分割機能を有している。また、モータMG1が電動機モードで動作するときには、その動力を減速して出力する機能を併有している。
【0046】
この第1の遊星歯車機構40aは、図示しないダンパ要素を介してエンジン10の機関出力軸12に結合された入力要素としての第1プラネタリキャリア44と、モータMG1のロータ51に結合された入出力要素としての第1サンギヤ42と、第1プラネタリキャリア44に自転可能に支持されて第1サンギヤ42の周りを公転することができる複数の第1プラネタリピニオン43と、これら第1プラネタリピニオン43が内接噛合する出力要素としての第1リングギヤ45aと、によって構成されている。
【0047】
第2の遊星歯車機構40cは、電動機モードのモータMG2が出力した回転動力を減速してその出力トルクを増大させる減速機能を有しており、動力分割用の遊星歯車機構40aと同一の回転中心軸線上に配置されている。また、モータMG2が発電機モードで動作するときには、出力要素40b側からの動力をモータMG2に取り込む機能を併有している。
【0048】
この第2の遊星歯車機構40cは、モータMG2のロータ52に結合された入出力要素としての第2サンギヤ46と、変速機ケース5に支持された固定要素としての第2プラネタリキャリア47と、第2プラネタリキャリア47に自転可能に支持された複数の第2プラネタリピニオン48と、これら第2プラネタリピニオン48が内接噛合する出力要素としての第2リングギヤ45cと、によって構成されている。そして、この第2リングギヤ45cが第1の遊星歯車機構40aの第1リングギヤ45aと一体に結合されて環状の出力要素40bが構成され、その出力要素40bにカウンタドライブギヤ49が装着されている。
【0049】
減速機構70は、例えばカウンタドライブギヤ49に噛合するカウンタドリブンギヤ74と、カウンタドリブンギヤ74に一体に結合するファイナルドライブギヤ78とを含んで構成されている。また、差動機構80は、ファイナルドライブギヤ78に噛合するリングギヤ82を有し、リングギヤ82に伝達される動力を左右のドライブシャフト3に差動可能に出力する公知のものである。なお、走行駆動車輪2の近傍には、車速センサ102として機能する車輪速センサ(詳細図示せず)が設けられている。
【0050】
一方、ハイブリッド駆動装置20の出力を制御する車両用制御装置30は、モータECU60、インバータ61、62、HVECU100、アクセルポジションセンサ101、車速センサ102、EV走行選択スイッチ103、エコスイッチ104、ハイブリッド駆動用の二次電池105、昇圧コンバータ106、電池ECU107および図示しないスキッド制御ECU等を含んで構成されている。
【0051】
モータECU60は、インバータ61、62を介してモータMG1、MG2を制御するための制御プログラムを有しており、HVECU100からのトルク指令値に応じて作動する。このモータECU60は、モータMG1、MG2の電動機としての出力トルクや回転速度あるいは発電機出力を、指令値に応じて制御するようになっている。また、モータECU60は、例えばモータMG1、MG2の内部磁石型のロータ51、52内の永久磁石の回転位置と両ロータ51、52の回転速度とを、前記レゾルバの検出信号を基に把握して、モータMG1、MG2を高効率に制御できるようになっている。さらに、モータECU60は、モータMG1、MG2のいずれか、例えばモータMG1によってエンジン10を始動させる場合に、その始動に必要な電力量を算出できるようになっている。
【0052】
インバータ61、62は、モータMG1、MG2に対応して設けられ、ハイブリッド駆動用の二次電池105の電圧を高電圧に昇圧させる昇圧コンバータ106と協働して、高電圧の電流とモータMG1、MG2の3相交流の間の変換を行う機能を有している。これら複数のインバータ61、62では、モータECU60からの指令値に応じて所定範囲内の任意の電圧と周波数でモータMG1、MG2に駆動電流を供給できる。また、各インバータ61、62では、対応するモータMG1またはMG2で発電された交流電流を二次電池105に充電するための直流電流に変換することができるようになっている。なお、モータMG1、MG2に対するこのようなインバータ61、62を介した電力供給や電力回収は、モータECU60およびHVECU100により制御される。
【0053】
アクセルポジションセンサ101は、ハイブリッド車両1に装備された図示しないアクセルペダルの操作量に対応する信号を、運転者からの要求アクセル開度Accとして出力するものである。車速センサ102は、例えば公知の車輪速センサで構成される。
【0054】
また、EV走行選択スイッチ103は、ハイブリッド駆動装置20のモータMG1、MG2のうちいずれか一方の電動機出力のみでハイブリッド車両1を走行させる電気自動車モードを選択したり、その選択状態を解除したりすることができるスイッチであり、運転者によってその選択状態(ON状態)と選択解除状態(OFF状態)とに操作される。
【0055】
エコスイッチ104は、HVECU100に対して、ハイブリッド駆動装置20の単位走行距離当りのエネルギ消費量を低減させることを通常より優先する走行駆動制御を要求する燃費優先走行モードの選択用および選択解除用のスイッチとして設けられている。
【0056】
ハイブリッド駆動用の二次電池105は、ハイブリッド車両1の発進時や加速時、登坂時等に電動機モードで作動するモータMG1、MG2のいずれかに電力を供給する一方、発電機モードで作動するモータMG1、MG2のいずれかからの発電電力(例えば、減速時の回生発電電流)によって充電され、蓄電することができるようになっている。
【0057】
電池ECU107は、電源監視プログラムを有しており、二次電池105の電圧、電流および温度を表す電源監視情報をHVECU100に出力できるようになっている。
【0058】
HVECU100は、ハイブリッド駆動システム制御用の電子制御ユニットである。このHVECU100は、原動機であるエンジン10およびモータMG1、MG2を要求出力に応じて作動するように統合制御する統合制御プログラムを内蔵している。なお、ここにいう要求出力(要求パワー)とは、運転者のアクセルペダル操作量等に応じた要求出力、もしくはクルーズコントロール等の他の走行制御機能から要求される要求出力、またはそのような複数の要求出力に基づいて算出される要求出力である。
【0059】
HVECU100は、その詳細なハードウェア構成を図示しないが、例えばCPU、ROM、RAMおよび書換え可能な不揮発性メモリを備えるとともに、A/D変換器を有する入力インターフェース回路、ドライバやリレースイッチを有する出力インターフェース回路、他の車載ECUとの間でデータ通信を行う通信ポート等を含んで構成されている。ROMおよび書換え可能な不揮発性メモリ(以下、ROM等という)には、例えば各種制御を実行するための制御プログラムが格納されるとともに、各種のマップや設定値データ等が格納されている。
【0060】
このHVECU100は、例えば運転者のアクセルペダル操作量に対応するアクセルポジションセンサ101からの要求アクセル開度Accと、車速センサ102からの車速信号、エンジン10内の図示しないクランク角センサからのエンジン回転数信号等を検出するとともに、エコスイッチ104からの燃費優先走行モードの選択信号(ON信号)またはその選択後の解除信号(OFF信号)を入力するようになっている。また、HVECU100は、例えば図示しないスキッド制御ECUからの駆動力分割比(エンジン10からの走行駆動のための配分動力と発電機作動時のモータMG1またはMG2への配分動力との比率)の要求値とを入力する。
【0061】
そして、これらの入力情報を基に、HVECU100は、ハイブリッド駆動装置20のトータル出力値と、エンジン10に要求されるパワー指令値およびエンジン回転数と、モータMG1、MG2へのトルク指令値等を算出して、パワー指令値およびエンジン回転数指令値を内蔵するエンジンECUに出力するとともに、トルク指令値をモータECU60に出力するようになっている。
【0062】
また、HVECU100は、電池ECU107からの電源監視情報に基づき、ハイブリッド駆動用の二次電池105の放電量および回生量を常時把握して、二次電池105の全電池容量に対する充電量比率に相当するSOC(State Of Charge)[%]を算出し、そのSOCの変動範囲を二次電池105の信頼性および寿命の面等から設定された所定の利用変動範囲内に制限するようになっている。
【0063】
加えて、HVECU100は、前記スキッド制御ECUと協働して、左右の走行駆動車輪2の回転速度を検出する車輪速センサ等の検出情報を基に、低μ路でのタイヤスリップ等により駆動力が急変し始めるときには、モータMG1、MG2のトルク指令値を変化させ、アクセルペダル操作等による要求出力に応じた駆動力を路面に伝えるトラクション制御を実行するようになっている。
【0064】
HVECU100に内蔵されるエンジンECUは、前記パワー指令値および各種センサ情報を基にエンジン10の出力を制御するための制御プログラムやマップを有している。このエンジンECUは、パワー指令値を入力すると、そのパワー指令値に対応するエンジン出力が得られるスロットル開度と、燃料噴射時間(燃料噴射量および噴射期間)および点火時期とを、マップおよび各種センサ情報を基に算出するようになっている。そして、エンジンECUは、入力されたパワー指令値に応じて、図示しない電子制御スロットル弁、インジェクタおよびイグニッションコイルに対して制御信号を出力するようになっている。また、このエンジンECUは、ハイブリッド駆動装置20がエンジン10のみの動力で走行駆動力を発生させるときには、ROM等に格納されたエンジン10の機関回転速度および機関負荷に対して燃料消費率や機関出力の値を特定可能な機関性能マップ等に基づいて、エンジン10を最適燃費に近い動作点に制御するようになっている。
【0065】
一方、HVECU100は、要求アクセル開度Acc等に基づいて算出される要求出力が予め設定された判定時間内において一定の変動幅内に保持されるとき(エコスイッチ104により燃費優先走行モードが選択されていることを更なる条件としてもよい)、ハイブリッド駆動装置20の燃料消費量を抑える(燃料消費率(km/L)や電力消費率(Km/kWh)を向上させる)ために、ハイブリッド駆動装置20を断続運転させながらハイブリッド車両1を走行させることができるようになっている。
【0066】
ここでの断続運転とは、ハイブリッド駆動装置20からの走行駆動力の出力によってハイブリッド車両1を加速する加速走行と、その加速後のハイブリッド車両1を惰性で走行させる惰性走行とを、交互に実行させるように走行駆動力を制御する運転である。
【0067】
また、ここにいう要求出力の一定の変動幅とは、運転者の要求出力が略一定レベルに保持されていると判断できる程度にその要求出力の変動量が少なく、一定時間当りの要求出力の変化量の絶対値(変化率)が予め設定された閾値変化率(例えば、数秒以上の一定時間内に車速が時速で数km/hだけ増加または減少する程度の要求出力の変化率)以下にとなる範囲を意味する。
【0068】
より具体的には、HVECU100は、アクセルポジションセンサ101からの要求アクセル開度Acc(運転者の要求出力)やその時点での車速その他の車両の走行状態に関する各種センサ情報を基に、ハイブリッド駆動制御の周期毎に目標車速を設定する。
【0069】
そして、ハイブリッド駆動装置20を断続運転させながらハイブリッド車両1を低燃費走行させる断続運転制御を実行するに際して、HVECU100は、まず、目標車速が、ハイブリッド駆動装置20の出力を断続させながらハイブリッド車両1を低燃費で走行させ得る車速域として予め設定された断続運転可能車速域、例えば中低速で市街地を走行する場合のような車速域内に入るか否かを判定する。
【0070】
そして、HVECU100は、目標車速がその断続運転可能車速域内に入り、かつ、要求出力が予め設定された判定時間内において前記一定の変動幅内に保持されると判定されることを条件に、ハイブリッド駆動装置20を断続運転させるようになっている。
【0071】
ハイブリッド駆動装置20の断続運転は、例えばエンジン10およびモータMG1、MG2のうち少なくともいずれか1つの原動機、例えば電動機モードのモータMG2を断続的に作動させることによって実行される。
【0072】
すなわち、モータMG2を電動機モードで断続運転させることで、ハイブリッド駆動装置20の出力を断続させる場合、HVECU100は、ハイブリッド駆動装置20のモータMG2を原動機として走行駆動力を発生させてハイブリッド車両1を加速(惰性走行後の速度回復時を含む)させる駆動出力状態と、モータMG2の出力を停止させてハイブリッド車両1を惰性(慣性)で走行させる出力停止状態とを交互に実行させる。したがって、ハイブリッド車両1は、ハイブリッド駆動装置20の駆動出力状態下で加速する加速走行と、ハイブリッド駆動装置20の出力停止状態(モータMG1、MG2のいずれか一方または双方の空転状態を含む)の下で惰性により走行する惰性走行とを繰り返しつつ、目標車速を含む許容変動幅内で走行することになる。
【0073】
また、HVECU100は、例えばハイブリッド駆動用の二次電池105の蓄電量(SOC)が不足している場合や要求出力が所定値を超える大きな要求出力値である場合は、断続運転可能車速域内において、モータMG2を原動機モードで断続運転させるとともに、その断続運転の開始時にモータMG1、MG2を共に電動機モードで同方向に作動させてエンジン10を始動させ、モータMG2だけでなくエンジン10をも断続運転させることができるようになっている。
【0074】
すなわち、HVECU100は、ハイブリッド駆動装置20に、エンジン10およびモータMG2からの動力により走行駆動力を発生させてハイブリッド車両1を加速させる駆動出力状態と、エンジン10およびモータMG2の出力を停止させてハイブリッド車両1を惰性(慣性)で走行させる出力停止状態とを交互に実行させることができる。
【0075】
したがって、この場合にも、ハイブリッド車両1は、ハイブリッド駆動装置20の駆動出力状態下で加速する加速走行と、ハイブリッド駆動装置20の出力停止状態下で惰性により走行する惰性走行とを繰り返しつつ、目標車速を含む許容変動幅内で走行することができる。
【0076】
より具体的には、図2(a)に示すように、HVECU100は、例えば現在の検出車速に近い目標車速V1Sが断続運転可能車速域内に入っており、かつ、要求アクセル開度Acc等に基づく運転者の要求パワー[kW]が略一定に保持されていると判定した時点(以下、断続開始時点という)T0から、ハイブリッド駆動装置20の断続運転(同図中の基準制御)を開始させる。そして、その断続運転の開始に際し、目標車速V1Sに対して車速変化がさほど感じられない通常許容レベルの速度変動幅に相当する制御速度範囲VR1を設定するようになっている。
【0077】
また、HVECU100は、断続開始時点T0で、原動機、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させ、走行中のハイブリッド車両1を惰性(慣性)で走行させ、その車速を制御速度範囲VR1の下限車速である停止終了車速V1Lまで低下させる。なお、図2(a)では、断続開始時点T0での車速を一例として目標車速V1Sよりわずかに大きい車速で例示しているが、これに限られないことはいうまでもない。
【0078】
車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除し、モータMG2(あるいはモータMG2およびエンジン10)から出力値Pm1の動力を出力させて、所定の加速走行の持続時間tm1の間、ハイブリッド駆動装置20により走行駆動力を発生させてハイブリッド車両1を加速させる(駆動出力状態)。さらに、その加速によって車速センサ102の検出車速が制御速度範囲VR1の上限車速である加速終了車速V1Hに達すると、モータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させて所定の惰性走行の持続時間t1だけハイブリッド車両1を惰性(慣性)で走行させる(出力停止状態)。
【0079】
HVECU100は、目標車速が断続運転可能車速域内に入っており、かつ、要求アクセル開度Acc等に基づく運転者の要求パワーが略一定に保持されている期間中、ハイブリッド駆動装置20を上述のような駆動出力状態と出力停止状態とを交互に繰り返す断続運転状態にする。
【0080】
この断続運転状態では、加速終了車速V1Hにおいてハイブリッド駆動装置20からの出力を停止させ、ハイブリッド車両1の車速が制御速度範囲VR1の加速終了車速V1Hから停止終了車速V1Lに低下するまで、モータMG2やエンジン10からの出力は停止されるから、その停止期間中におけるハイブリッド駆動装置20の電力消費量や燃料消費量はゼロとなる。一方、停止終了車速V1Lにおいてハイブリッド駆動装置20からの出力(同図中のモータ出力)を再開させ、ハイブリッド車両1の車速を制御速度範囲VR1の停止終了車速V1Lから加速終了車速V1Hに上昇させるときのハイブリッド駆動装置20の出力値Pm1は、目標車速V1Sに対応するモータ出力よりわずかに高い出力値となり、モータMG2の電力消費量はさほど増加することがなく、エンジン10の燃費もさほど変化しない。
【0081】
したがって、上述のようなハイブリッド駆動装置20の断続運転を実行する場合、ハイブリッド駆動装置20を用いて目標車速V1Sで定速走行させる場合に比べて、ハイブリッド駆動装置20の電力消費量や燃料消費量は少なくて済み、ハイブリッド車両1の低燃費走行が可能となる。
【0082】
一方、HVECU100は、上述のハイブリッド駆動装置20の断続運転による低燃費走行中に、その断続運転に起因する振動・騒音が車両の共振域で悪化するのを防止するよう制御を実行できるようになっている。
【0083】
すなわち、ハイブリッド駆動装置20の断続運転中には、その原動機出力である走行駆動用の回転動力が比較的長い周期で断続され、車速が設定速度域内で繰り返し増加および減少するため、例えば原動機から出力される動力を走行駆動車輪2まで伝達する動力伝達機構(動力分割統合機構40、減速機構70および差動機構80)において比較的周波数の低いねじり振動や騒音が生じたり、原動機となるモータMG2(またはMG1)のスイッチングの繰り返しに起因する騒音が生じたりする場合がある。そして、そのような比較的長周期の特定の振動や騒音(以下、単に特定の振動という)の周波数が車両の共振周波数域内に入ると、車両の乗り心地を害する程度にその振動・騒音レベルが高くなってしまう。
【0084】
そこで、HVECU100は、ROM等に予め格納された共振回避制御プログラムに従って、ハイブリッド駆動装置20の断続運転のために原動機であるモータMG2(あるいはモータMG2およびエンジン10)の出力が変動することに起因して生じる特定の振動の周波数が、ハイブリッド車両1の共振周波数域として予め設定された特定の周波数範囲内に入るか否かを判定する共振判定部111の機能を発揮するようになっている。また、HVECU100は、前記共振回避制御プログラムに従って、共振判定部111により原動機出力の変動に伴う特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されたことを条件に、その特定の振動の周波数が共振周波数域から外れるようにハイブリッド駆動装置20の断続運転の条件を通常とは異なる条件に変更する断続運転条件変更部112の機能を発揮するようになっている。
【0085】
具体的には、共振判定部111は、例えばハイブリッド車両1の各走行状態についてハイブリッド駆動装置20の断続運転に起因して生じる特定の振動がハイブリッド車両1の共振周波数域で大きくなるか否かを判定するための判定用データテーブルを有している。
【0086】
この判定用データテーブルは、例えばハイブリッド車両1についての予めの実験によって、ハイブリッド駆動装置20の原動機の出力(パワー)[kW]および断続周期[秒]とハイブリッド車両1の車速[km/h]とをそれぞれ変化させた場合の各運転状態について、その運転状態下でのハイブリッド駆動装置20の断続運転に起因して生じる特定の振動のレベルを測定した結果に基づいて作成されている。また、この判定用データテーブルは、各運転状態下で、ハイブリッド駆動装置20の断続運転に起因して生じる特定の振動のレベルが、ハイブリッド車両1の共振周波数域で予め設定した共振判定閾値を超えて大きくなり、ハイブリッド車両1の乗り心地を低下させるか否かを判定した結果を集めたものである。その共振判定閾値は、ハイブリッド駆動装置20の原動機出力変動に起因して生じる特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ることで、特定の振動のレベルがその閾値を超えて大きくなるような値として設定されている。なお、ここにいうハイブリッド車両1の共振周波数域とは、例えばエンジン10が停止する際にそのアイドル回転数未満の低回転速度領域で動力伝達系を振動させるとともに、エンジンマウント等を介して車体側に振動を伝達させる場合のような、低周波数の共振領域である。
【0087】
このような判定用データテーブルを有する共振判定部111は、ハイブリッド駆動装置20の原動機出力[kW]やハイブリッド車両1の車速[km/h]を所定時間毎に取り込み、それらの条件とハイブリッド駆動装置20の断続運転のために設定している原動機の断続周期とを基に、判定用データテーブルを参照して、前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ってその特定の振動が悪化するか否かを判定することができるようになっている。
【0088】
一方、断続運転条件変更部112は、ハイブリッド駆動装置20の断続運転の条件として、前記特定の振動の周波数がハイブリッド車両1の共振周波数域から外れる通常時に設定される第1の断続運転条件と、前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入るときに設定される第2の断続運転条件と、を読み出し可能に記憶した条件記憶メモリ112aを有している。
【0089】
この断続運転条件変更部112は、共振判定部111によって前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されることを条件として、第1の断続運転条件から第2の断続運転条件への運転条件の変更を行うことで、ハイブリッド車両1の加速走行中における原動機の出力値と、ハイブリッド駆動装置20の断続運転の実行期間中における原動機の出力の断続周期とのうち、少なくとも一方を変更するようになっている。
【0090】
すなわち、断続運転条件変更部112は、例えば断続運転中の駆動出力状態にあるときのモータMG2(あるいはモータMG2およびエンジン10)の出力値および断続周期のうち少なくとも一方を変更することができるようになっている。
【0091】
また、断続運転条件変更部112は、共振判定部111によって前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されることを条件として、ハイブリッド駆動装置20の断続運転による加速走行または惰性走行を少なくとも1回含むよう予め設定された共振回避期間中に、断続運転の条件を通常の第1の断続運転条件とは異なる第2の断続運転条件に変更することができるようになっている。
【0092】
具体的には、断続運転条件変更部112は、共振判定部111によって特定の振動の周波数が共振周波数域内に入ると判定されることを条件として、加速走行中の原動機、例えばモータMG2(あるいはモータMG2およびエンジン10)の出力値を通常の出力値より増加させるか、あるいは、断続運転の実行期間中におけるモータMG2の出力の断続周期を通常の断続周期より短くするようになっている。
【0093】
また、断続運転条件変更部112によって変更可能な断続運転の条件には、断続運転の実行期間中における加速走行毎のモータMG2の運転状態を終了させる加速終了車速と、断続運転の実行期間中における惰性走行毎のモータMG2の停止状態を終了させる停止終了車速と、のうち少なくとも一方が含まれている。
【0094】
そして、断続運転条件変更部112は、共振判定部111によって前記特定の振動の周波数が共振周波数域内に入ると判定されることを条件として、加速終了車速と停止終了車速とのうち少なくとも一方を、前記特定の振動の周波数がハイブリッド車両1の共振周波数域から外れるように変更する。その変更は、例えば、加速終了車速を通常の加速終了車速よりも低い車速に変更するか、停止終了車速を通常の停止終了車速よりも高い車速に変更するものである。
【0095】
より具体的には、断続運転条件変更部112は、共振判定部111によって前記特定の振動の周波数が共振周波数域内に入ると判定されず、共振周波数域から外れると判定されたときには、図2(a)に基準制御としてタイミングチャートで示すような第1の断続運転条件を設定する。一方、断続運転条件変更部112は、共振判定部111によって前記特定の振動の周波数が共振周波数域内に入ると判定されたときには、図2(b)にNV回避制御として実線のタイミングチャートで示すような第2の断続運転条件を設定する。
【0096】
図2(a)に示す第1の断続運転条件の下では、HVECU100は、断続開始時点T0から、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR1を設定する。また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速を制御速度範囲VR1の停止終了車速V1Lまで低下させる。そして、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm1の間、ハイブリッド車両1を加速させる(駆動出力状態)。さらに、その加速によって車速が制御速度範囲VR1の加速終了車速V1Hに達すると、モータMG2からの出力を停止させて所定の惰性走行の持続時間t1だけハイブリッド車両1を惰性走行させる(出力停止状態)。
【0097】
HVECU100は、また、目標車速が断続運転可能車速域内に入っており、かつ、要求出力が略一定に保持されている期間中は、ハイブリッド駆動装置20を上述のような断続運転状態にする。したがって、ハイブリッド駆動装置20の電力消費量や燃料消費量は少なくて済み、ハイブリッド車両1の低燃費走行が可能となる。
【0098】
図2(b)に示す第2の断続運転条件の下では、HVECU100は、断続開始時点T0から、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR2を設定する。ここで、制御速度範囲VR2は、制御速度範囲VR1の加速終了車速V1Hに対し低車速側にずれた別の加速終了車速V1H´と制御速度範囲VR1の停止終了車速V1Lとの間の車速変動範囲として設定される。すなわち、制御速度範囲VR2は、制御速度範囲VR1とは異なる速度制御範囲として設定される。
【0099】
また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速を制御速度範囲VR1の停止終了車速V1Lまで低下させる。そして、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm2の間、ハイブリッド車両1を加速させる(駆動出力状態)。次いで、共振回避制御の主要な処理が実行される回避期間に入り、加速走行によって車速が通常の加速終了車速V1Hより低速側に設定された別の加速終了車速V1H´に達すると、モータMG2からの出力を停止させて所定の惰性走行の持続時間t2だけハイブリッド車両1を惰性走行させる(出力停止状態)。そして、それ以降は、第2の断続運転条件が設定されている期間中、停止終了車速V1Lと別の加速終了車速V1H´との間で車速が変化するよう、原動機出力の断続制御が実行される。なお、ここで、通常断続運転時における加速終了車速V1Hと共振回避制御時における加速終了車速V1H´との差は、目標車速に応じて段階的にまたは無段階に、目標車速が大きくなるほどその差値(V1H−V1H´)が大きくなるよう可変設定してもよい。
【0100】
HVECU100は、さらに、ハイブリッド車両1の減速時に、走行駆動車輪2からハイブリッド駆動装置20に伝達される動力を、モータMG2により電力に変換させて、二次電池105に充電させる、いわゆる回生制動の制御を実行できるようになっている。
【0101】
また、HVECU100は、エンジン10およびモータMG1、MG2のうちいずれを原動機として動作させるかを、要求出力値、二次電池105の蓄電状態、EV走行選択スイッチ103やエコスイッチ104、さらには図示しないスポーツ走行モード選択スイッチのON/OFF状態等に応じて、決定するようになっている。したがって、ハイブリッド車両1は、エンジン10からの動力のみで走行するエンジン走行、エンジン10およびモータMG1、MG2を併用して走行するHV走行(ハイブリッド走行)、モータMG1、MG2のいずれかからの動力のみによって走行するEV走行(電気自動車走行)等のいずれかで走行できる。
【0102】
次に、作用について説明する。
【0103】
上述のように構成された本実施形態の車両制御装置においては、HVECU100によるハイブリッド駆動制御の制御周期毎に、図3および図4に概略の流れを示すような処理がそれぞれに実行される。また、これらの処理に先立って、ハイブリッド駆動制御の制御周期毎に、アクセルポジションセンサ101からの要求アクセル開度Accやその時点での車速その他の車両走行状態に関するセンサ情報を基に、目標車速が算出される。
【0104】
図3に示すのは、車両走行中に前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入るか否かに応じて、ハイブリッド駆動装置20の断続運転の条件を変更する処理を示している。
【0105】
この図3に示す条件変更処理においては、まず、車速がゼロでない状態、すなわち、ハイブリッド車両1が走行中であるか否かが判別される(ステップS11)。そして、走行中でなければ(ステップS11でNOの場合)、今回の処理は終了する。
【0106】
ハイブリッド車両1が走行中であれば(ステップS11でYESの場合)、ハイブリッド駆動装置20の出力を制御するためのパルス駆動制御ルーチンが開始されるとともに、アクセルポジションセンサ101等のセンサ情報を基に運転者の要求パワー(要求出力)が取得される(ステップS12、S13)。
【0107】
次いで、共振判定部111により、運転者の要求パワーに対応するハイブリッド駆動装置20の原動機出力[kW]および原動機の断続周期とハイブリッド車両1の現在の車速[km/h]とを基に、判定用データテーブルを参照した結果から、前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ってその特定の振動が悪化するか否かが判定される(ステップS14)。
【0108】
このとき、共振判定部111によって前記特定の振動の周波数がハイブリッド車両1の共振周波数内に入らず、共振周波数域から外れると判定されれば(ステップS14でNOの場合)、次いで、断続運転条件変更部112によって通常の断続運転条件である第1断続運転条件が設定される(ステップS15)。
【0109】
反対に、このとき、共振判定部111によって前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されれば(ステップS14でYESの場合)、次いで、断続運転条件変更部112によって、NV回避制御時の断続運転条件である第2の断続運転条件が設定される(ステップS16)。
【0110】
一方、このような車両走行モードに応じた条件変更処理と並行して、HVECU100では、図4に示すようなハイブリッド駆動装置20の断続運転制御が実行される。
【0111】
図4に示す断続運転制御においては、まず、目標車速が断続運転可能車速域内か否かが判別される(ステップS21)。このとき、目標車速が断続運転可能車速域から外れていれば(ステップS21でNOの場合)、今回の処理は終了する。
【0112】
目標車速が断続運転可能車速域内に入っていれば(ステップS21でYESの場合)、次いで、要求出力の一定時間内における変化量が予め設定された一定の変動幅内に入る状態、すなわち、運転者が略一定の駆動出力を要求する状態、または、要求出力が一定の変動幅内で漸増もしくは漸減する状態に該当するか否かが判別される(ステップS22)。
【0113】
この判別の結果、要求出力の一定時間内における変化量が一定の変動幅から外れる程度に大きければ(ステップS22でNOの場合)、次いで、非断続運転、すなわち通常の連続運転が開始される(ステップS23)。したがって、それまでに断続運転が実行されていれば、その断続運転が中断される。
【0114】
次いで、要求出力の一定時間内における変化量が一定の変動幅から増加側に外れる加速要求状態であるか否かが判別される(ステップS24)。
【0115】
このときの判別結果がYESであれば、ハイブリッド駆動装置20のモータMG2が駆動され、あるいはエンジン10およびモータMG2が駆動されて、ハイブリッド駆動装置20によりハイブリッド車両1を加速可能な駆動出力がなされる(ステップS25)。なお、エンジン10は、エンジン10を駆動した方がハイブリッド駆動装置20として高効率に走行駆動できるときや、二次電池105への充電が必要なときに始動される。また、モータMG1は、そのエンジン始動時に電動機モードで作動する一方、二次電池105への充電時には発電機モードで作動する。
【0116】
一方、ステップS24での判別結果がNOであれば、すなわち、要求出力の一定時間内における変化量が一定の変動幅から減少側(アクセルOFF側)に外れる状態となっていれば、ハイブリッド駆動装置20のモータMG2が停止され、あるいはエンジン10およびモータMG2が停止されて、ハイブリッド駆動装置20による駆動出力が停止される(ステップS26)。
【0117】
上述のようなハイブリッド駆動装置20の駆動出力または出力停止の処理とならなかった場合、すなわち、要求出力の一定時間内における変化量が前記一定の変動幅内に入り、運転者が略一定の駆動出力を要求する状態、または、要求出力が一定の変動幅内で漸増もしくは漸減する状態となった場合(ステップS22でYESの場合)、ハイブリッド駆動装置20の断続運転が開始される(ステップS27)。
【0118】
この断続運転の開始に際しては、まず、図2(a)または図2(b)に示す断続開始時点T0で、ハイブリッド駆動装置20の出力を停止させ、走行中のハイブリッド車両1を惰性走行に移行させて、その車速を制御速度範囲VR1の停止終了車速V1Lまで低下させた後に、ハイブリッド駆動装置20の出力(例えば、モータMG2の駆動)を開始させる。なお、このように最初に車速を低下させることなく、断続開始時点T0から即座にハイブリッド駆動装置20の出力を開始させることもできる。
【0119】
次いで、加速終了条件が成立したか否か、例えばハイブリッド駆動装置20からの走行駆動出力によってハイブリッド車両1が加速され、車速センサ102の検出車速が制御速度範囲VR1の加速終了車速V1Hに達したか否かが判別される(ステップS28)。この判別処理は、図2(a)、図2(b)に示す所定の加速走行の持続時間tm1、tm2が経過したか否かの判別であってもよいし、両判別のうちいずれかの判別結果に応じて次ステップに進んでもよい。
【0120】
この判別の結果、加速終了条件が成立していれば(ステップS28でYESの場合)、次いで、ハイブリッド駆動装置20のモータMG2が停止され、あるいはエンジン10およびモータMG2が停止されて、ハイブリッド駆動装置20による駆動出力が停止される(ステップS30)。このとき、ハイブリッド車両1は惰性走行に移行することになる。
【0121】
一方、加速終了条件が成立していなければ(ステップS28でNOの場合)、次いで、停止終了条件が成立したか否か、例えばハイブリッド駆動装置20からの走行駆動出力の停止によってハイブリッド車両1の車速が低下し、車速センサ102の検出車速が制御速度範囲VR1の停止終了車速V1Lに達したか否かが判別される(ステップS29)。この判別処理は、図2(a)、図2(b)に示す所定の惰性走行の持続時間t1またはt2が経過したか否かの判別であってもよいし、両判別のうちいずれかの判別結果に応じて次ステップに進んでもよい。
【0122】
この判別の結果、停止終了条件が成立していれば(ステップS29でYESの場合)、次いで、ハイブリッド駆動装置20のモータMG2が駆動され、あるいはエンジン10およびモータMG2が駆動されて、ハイブリッド駆動装置20による駆動出力が再開される(ステップS31)。このとき、ハイブリッド車両1は加速走行に移行することになる。
【0123】
一方、停止終了条件が成立していなければ(ステップS29でNOの場合)、次いで、ハイブリッド駆動装置20の現在の状態(駆動出力状態または出力停止状態)が保持される(ステップS32)。
【0124】
このように、本実施形態においては、図3に示す断続運転の条件変更処理と図4に示す断続運転制御の処理とが、並行して、HVECU100によるハイブリッド駆動制御の制御周期に対応して繰り返し実行される。したがって、車両走行中に前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ってその特定の振動が悪化すると判定されたときには、前記特定の振動の周波数がハイブリッド車両1の共振周波数域内に入るのを回避するように、即座に通常の第1の断続運転条件から共振回避のための第2の断続運転条件に変更されることになる。
【0125】
このように、本実施形態では、断続運転による低燃費走行のための原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域内に入ると共振判定部111で判定されると、その特定の振動の周波数が車両の共振周波数域から外れるように、断続運転条件変更部112により、原動機の断続運転の条件が通常の第1の断続運転条件とは異なる第2の断続運転条件に変更される。したがって、原動機の断続運転に起因する特定の振動や騒音が車両の共振周波数域で悪化することが、有効に抑制される。その結果、本実施形態の車両用制御装置30は、原動機の断続運転による低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができるものとなる。
【0126】
また、本実施形態においては、断続運転条件変更部112が、共振判定部111によって特定の振動の周波数が共振周波数域内に入ると判定されることを条件として、加速走行中における原動機の出力値と断続運転の実行期間中における原動機の出力の断続周期とのうち少なくとも一方、例えばモータMG2の出力の断続周期tm1、tm2を変更する。したがって、モータMG2の出力値を変えることなく、モータMG2の出力の変動周波数を車両の共振周波数域から外すことができる。
【0127】
さらに、本実施形態では、断続運転条件変更部112は、共振判定部111によって特定の振動の周波数が共振周波数域内に入ると判定されることを条件として、加速走行または惰性走行を少なくとも1回含むよう予め設定された共振回避期間(図2(b)中の回避期間)に、断続運転の条件を通常とは異なる条件に変更するので、低燃費走行が可能な運転条件で実行される断続運転中の共振回避期間を短時間に抑えて、エネルギ消費率(単位エネルギ消費量当りの走行距離)を抑えることができる。
【0128】
加えて、本実施形態では、断続運転条件変更部112は、共振判定部111によって特定の振動の周波数が共振周波数域内に入ると判定されることを条件として、断続運転の実行期間中における原動機の出力の断続周期を通常の断続周期(tm1+t1)より短い断続周期(tm2+t2)に短縮するので、断続運転による車速変化の周期が短くなることから、共振回避制御のための断続運転条件の変化による乗り心地の低下が生じ難い。
【0129】
また、本実施形態では、断続運転条件変更部112が、共振判定部111によって特定の振動の周波数が共振周波数域内に入ると判定されることを条件として、加速終了車速V1Hと停止終了車速V1Lとのうち少なくとも一方を、特定の振動の周波数が共振周波数域から外れるように変更する。したがって、出力の変化の有無に関係なく、加速終了車速V1Hと停止終了車速V1Lとのうち少なくとも一方を変更するだけで、原動機の出力変動に伴う特定の振動の周波数を共振周波数域から外すことができ、簡単な制御で共振回避制御が実行できることとなる。
【0130】
殊に、断続運転条件変更部112は、共振判定部111によって特定の振動の周波数が共振周波数域内に入ると判定されることを条件に、加速終了車速を通常の加速終了車速V1Hよりも低い加速終了車速V1H´に変更するので、共振回避制御時に車速変化の周期が短くなることになり、断続運転条件の変化による乗り心地の低下が生じ難い。
【0131】
また、断続運転条件変更部112は、第1の断続運転条件と第2の断続運転条件とを読み出し可能に記憶した条件記憶メモリ112aを有しているので、原動機の出力変動周波数がハイブリッド車両1の共振周波数域内に入るときに断続運転条件を迅速に切り替えて的確な共振回避制御を実行することができる。
【0132】
このように、本実施形態においては、ハイブリッド駆動装置20の断続運転による低燃費走行を実現するとともに、その低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができ、ハイブリッド車両1の乗り心地を向上させることのできる車両用制御装置30を提供することができる。
【0133】
なお、本実施形態では、断続運転条件変更部112は、共振判定部111によって特定の振動の周波数が共振周波数域内に入ると判定されることを条件として、加速終了車速を通常の加速終了車速V1Hよりも低速となる別の加速終了車速V1H´に変更するものであったが、停止終了車速を通常の停止終了車速V1Lよりも高い車速となる別の停止終了車速に変更するものであってもよい。その場合も、共振回避制御時に車速変化の周期が短くなることになり、断続運転条件の変化による乗り心地の低下が生じ難い。
【0134】
また、上述の第1実施形態では、断続運転条件変更部112の条件記憶メモリ112aに格納される第1の断続運転条件と第2の断続運転条件は、図2(a)および図2(b)に例示するそれぞれの条件に特定したが、断続運転条件変更部112の条件記憶メモリ112aに格納される第1の断続運転条件と第2の断続運転条件は、車速その他の他の走行条件、例えば路面の傾斜度(例えば、登坂路、下り坂)や、路面の状況(例えばウェット路面、雪道、氷結路、アスファルト、砂利道等)に応じて異なるそれぞれ複数の第1の断続運転条件と第2の断続運転条件として設定され、車速やブレーキ制御やトラクション制御その他の制御機能状把握される路面状況に応じて最適な断続運転条件を選択できるようにしてもよい。
【0135】
(第2実施形態)
図5(a)および図5(b)は、本発明の第2実施形態に係る車両用制御装置における異なる2つの断続運転の条件を対比して示すタイミングチャートである。
【0136】
なお、以下に説明する各実施形態の車両用制御装置は、上述の第1実施形態と略同様な構成を有しており、そのハイブリッド駆動装置20の断続運転の条件のみが上述の第1実施形態とは異なるものである。したがって、以下の説明においては、第1実施形態の車両用制御装置と同一または類似する構成については、図1中に示した第1実施形態中の対応する構成要素の符号を用いて説明する。
【0137】
図5(a)は、第2実施形態に係る車両用制御装置における第1の断続運転条件を示しており、図5(b)は、その車両用制御装置での共振回避制御時に適用される第2の断続運転条件を示している。
【0138】
本実施形態の車両用制御装置30では、共振判定部111によって特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されず、その共振周波数域から外れると判定されると、断続運転条件変更部112によって、第1の断続運転条件が設定される。一方、共振判定部111によって特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されると、断続運転条件変更部112によって、第1の断続運転条件から第2の断続運転条件への条件変更がなされることで、共振回避制御がなされる。
【0139】
すなわち、図5(a)に示すように、第1の断続運転条件の下では、HVECU100は、断続開始時点T0から、第1実施形態の通常断続運転時と同様に、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR1を設定する。また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速を制御速度範囲VR1の停止終了車速V1Lまで低下させる。そして、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm1の間、ハイブリッド車両1を加速させる(駆動出力状態)。さらに、その加速によって車速が加速終了車速V1Hに達すると、モータMG2からの出力を停止させて所定の惰性走行の持続時間t1だけハイブリッド車両1を惰性走行させる(出力停止状態)。
【0140】
HVECU100は、また、目標車速が断続運転可能車速域内に入っており、かつ、要求出力が略一定に保持されている期間中は、ハイブリッド駆動装置20を上述のような断続運転状態にする。したがって、ハイブリッド駆動装置20の電力消費量や燃料消費量は少なくて済み、ハイブリッド車両1の低燃費走行が可能となる。
【0141】
一方、図5(b)に示すように、第2の断続運転条件の下では、HVECU100は、モータMG2(あるいはモータMG2およびエンジン10)の出力値を、通常走行モード時の出力値Pm1から、この出力値Pm1に対し所定の増加率(>1)をかけて増加させた出力値Pm2に変更する。
【0142】
HVECU100は、また、出力値Pm2を設定するに際してモータMG2の基準損失マップやエンジン10の機関性能マップ等として記憶格納された情報を参照して、出力値Pm2を前記増加率に対応して運転者等が大きな車速変化を感じない程度の出力差の範囲内で探索し、設定するようになっている。
【0143】
本実施形態では、原動機出力が出力値Pm1から出力値Pm2に変更されると、通常と同様の断続運転中の制御車速範囲VR2(=VR1)の上限車速V1Hに達するまでの加速時間が時間tm1からそれより短い時間tm2に変化するので、原動機の断続周期を変化させてその出力の変動周波数を車両の共振周波数域から外すことができる。
【0144】
また、本実施形態では、共振判定部111によって特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されることを条件として、通常断続運転時の出力値Pm1から共振回避制御時の出力値Pm2に増加させる。したがって、加速走行中におけるハイブリッド駆動装置20のモータMG2等の出力が増加されてハイブリッド駆動装置20のモータMG2等のエネルギ効率が高まる。しかも、断続運転中の加速走行期間内における加速度が低下することがなく、共振回避制御のための断続運転条件の変化による乗り心地の低下が生じ難い。
【0145】
本実施形態においても、ハイブリッド駆動装置20の断続運転による低燃費走行を実現するとともに、その低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができ、ハイブリッド車両1の乗り心地を向上させることのできる車両用制御装置30を提供することができる。
【0146】
なお、HVECU100は、車速が加速終了車速V1Hに達したか否かによって加速走行の終了タイミングを特定するのに代えて、断続運転の実行期間中における加速走行の持続時間を、通常断続運転時の第1の断続運転条件の一部である加速走行の持続時間tm1から、この持続時間tm1に対し所定の減少率(<1)をかけて減少させた加速走行の持続時間tm2に変更し、加速走行がこの持続時間tm2に達したか否によって加速走行の終了タイミングを特定するようにしてもよい。
【0147】
(第3実施形態)
図6(a)および図6(b)は、本発明の第3実施形態に係る車両用制御装置における異なる2つの断続運転の条件を対比して示すタイミングチャートであり、図6(a)は第1の断続運転条件を、図8(b)は第2の断続運転条件を、それぞれ示している。
【0148】
図6(a)に示す第1の断続運転条件の下では、HVECU100は、断続開始時点T0から、第1、第2実施形態の通常断続運転時と同様に、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR1を設定する。また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速を停止終了車速V1Lまで低下させる。そして、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm1の間、ハイブリッド車両1を加速させる(駆動出力状態)。さらに、その加速によって車速が加速終了車速V1Hに達すると、モータMG2からの出力を停止させて所定の惰性走行の持続時間t1だけハイブリッド車両1を惰性走行させる(出力停止状態)。
【0149】
HVECU100は、また、目標車速が断続運転可能車速域内に入っており、かつ、要求出力が略一定に保持されている期間中は、ハイブリッド駆動装置20を上述のような断続運転状態にする。したがって、ハイブリッド駆動装置20の電力消費量や燃料消費量は少なくて済み、ハイブリッド車両1の低燃費走行が可能となる。
【0150】
一方、図6(b)に示す第2の断続運転条件の下では、HVECU100は、断続開始時点T0から、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR2を設定する。ここで、制御速度範囲VR2は、制御速度範囲VR1の停止終了車速V1Lに対し高車速側にずれた別の停止終了車速V1L´と制御速度範囲VR1の加速終了車速V1Hとの間の車速変動範囲として設定される。すなわち、制御速度範囲VR2は、制御速度範囲VR1とは異なる速度制御範囲として設定される。また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速をまずは制御速度範囲VR1の停止終了車速V1Lまで低下させ、次いで、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm2の間、ハイブリッド車両1を加速させる(駆動出力状態)。そして、その加速によって車速が加速終了車速V1Hに達すると、共振回避期間となり、最初に、モータMG2からの出力を停止させて所定の惰性走行の持続時間t2だけハイブリッド車両1を惰性走行させる(出力停止状態)。
【0151】
次いで、車速が制御速度範囲VR1の別の停止終了車速V1L´まで低下すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm2の間、ハイブリッド車両1を加速させる(駆動出力状態)。
【0152】
本実施形態では、このように、共振判定部111によって特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されることを条件として、通常断続運転時におけるハイブリッド駆動装置20のモータMG2等の出力の断続周期(tm1+t1)からそれより短時間となる共振回避制御時の断続周期(tm2+t2<tm1+t1)に変更される。したがって、モータMG2等の出力レベルの変化がなく、しかも、共振回避制御期間内における断続周期は短くなることから、共振回避制御のための断続運転条件の変化による乗り心地の低下が生じ難い。
【0153】
本実施形態においても、ハイブリッド駆動装置20の断続運転による低燃費走行を実現するとともに、その低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができ、ハイブリッド車両1の乗り心地を向上させることのできる車両用制御装置30を提供することができる。
【0154】
(第4実施形態)
図7(a)および図7(b)は、本発明の第4実施形態に係る車両用制御装置における異なる2つの断続運転の条件を対比して示すタイミングチャートであり、図7(a)は第1の断続運転条件を、図7(b)は第2の断続運転条件を、それぞれ示している。
【0155】
図7(a)に示す第1の断続運転条件の下では、HVECU100は、断続開始時点T0から、上述の各実施形態の通常断続運転時と同様に、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR1を設定する。また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速を停止終了車速V1Lまで低下させる。そして、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm1の間、ハイブリッド車両1を加速させる(駆動出力状態)。さらに、その加速によって車速が加速終了車速V1Hに達すると、モータMG2からの出力を停止させて所定の惰性走行の持続時間t1だけハイブリッド車両1を惰性走行させる(出力停止状態)。
【0156】
HVECU100は、また、目標車速が断続運転可能車速域内に入っており、かつ、要求出力が略一定に保持されている期間中は、ハイブリッド駆動装置20を上述のような断続運転状態にする。したがって、ハイブリッド駆動装置20の電力消費量や燃料消費量は少なくて済み、ハイブリッド車両1の低燃費走行が可能となる。
【0157】
一方、図7(b)に示す第2の断続運転条件の下では、HVECU100は、断続開始時点T0から、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR1、VR2をそれぞれに設定する。ここで、制御速度範囲VR2は、制御速度範囲VR1の加速終了車速V1Hに対し低車速側にずれた別の加速終了車速V1H´と制御速度範囲VR1の停止終了車速V1Lとの間の車速変動範囲として設定される。すなわち、両制御速度範囲VR1、VR2は、互いに異なる速度制御範囲として設定される。
【0158】
また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速をまずは制御速度範囲VR1の停止終了車速V1Lまで低下させ、次いで、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm1の間、ハイブリッド車両1を加速させる(駆動出力状態)。そして、その加速によって車速が加速終了車速V1Hに達すると、モータMG2からの出力を停止させて所定の惰性走行の持続時間t1だけハイブリッド車両1を惰性走行させる(出力停止状態)。
【0159】
次いで、車速が制御速度範囲VR1の停止終了車速V1Lに低下すると、共振回避期間となり、最初に、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm2の間、または、車速センサ102の検出車速が別の加速終了車速V1H´に達するまでの間、ハイブリッド車両1を加速させる(駆動出力状態)。
【0160】
そして、車速センサ102の検出車速が加速終了車速V1H´に達すると、モータMG2による加速駆動状態を解除して、所定の惰性走行の持続時間t2だけハイブリッド車両1を惰性走行させる。
【0161】
次いで、車速が制御速度範囲VR1の停止終了車速V1Lに低下すると、今度は、モータMG2の出力を共振回避期間以外の出力値Pm1に所定の減少率をかけた共振回避期間内の出力値Pm3に低下させて、所定の加速走行の持続時間tm3の間、または、車速センサ102の検出車速が制御速度範囲VR1の加速終了車速V1Hに達するまでの間、ハイブリッド車両1を加速させる。この場合の加速走行の持続時間tm3や、共振回避期間内の出力値Pm3は、この共振回避期間内の出力値Pm3での加速の終了時点において、それまでの共振回避期間外の第1の断続運転条件下での断続運転が継続されていた場合と同位相の車速変化に復帰させるように設定される。
【0162】
本実施形態では、このように、共振判定部111によって特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されることを条件として、通常断続運転時におけるハイブリッド駆動装置20のモータMG2等の出力の断続周期(tm1+t1)から一時的な共振回避期間内においてのみ、共振回避制御時の断続周期(tm2+t2<tm1+t1)に変更され、次いで、元の車速変動と同位相の車速変動となるような断続運転に復帰させる。したがって、断続運転による車速変動の位相のずれがなく、しかも、共振回避制御期間内における断続周期はほぼ変化しないことになるから、共振回避制御のための断続運転条件の変化による乗り心地の低下が生じ難い。
【0163】
本実施形態においても、ハイブリッド駆動装置20の断続運転による低燃費走行を実現するとともに、その低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができ、ハイブリッド車両1の乗り心地を向上させることのできる車両用制御装置30を提供することができる。
【0164】
(第5実施形態)
図8(a)および図8(b)は、本発明の第5実施形態に係る車両用制御装置における異なる2つの断続運転の条件を対比して示すタイミングチャートであり、図8(a)は第1の断続運転条件を、図8(b)は第2の断続運転条件を、それぞれ示している。
【0165】
図8(a)に示す第1の断続運転条件の下では、HVECU100は、第4実施形態の場合と同様に、通常の断続運転制御を実行する。したがって、ハイブリッド駆動装置20の電力消費量や燃料消費量は少なくて済み、ハイブリッド車両1の低燃費走行が可能となる。
【0166】
一方、図8(b)に示す第2の断続運転条件の下では、HVECU100は、断続開始時点T0から、ハイブリッド駆動装置20の断続運転を開始させるとともに、目標車速V1Sに対して車速変化がさほど感じられない制御速度範囲VR1、VR2、VR3をそれぞれに設定する。ここで、制御速度範囲VR2、VR3は、それぞれ制御速度範囲VR1の停止終了車速V1Lに対し高車速側にずれた別の停止終了車速V1La、V1Lbと制御速度範囲VR1の加速終了車速V1Hとの間の車速変動範囲として設定される。すなわち、3つの制御速度範囲VR1、VR2、VR3は、互いに異なる速度制御範囲として設定され、それらのうち制御速度範囲VR2は、制御速度範囲VR1、VR3のどちらよりも狭い制御速度範囲に設定されている。
【0167】
また、HVECU100は、断続開始時点T0で、例えばモータMG2(あるいはモータMG2およびエンジン10)からの出力を停止させてハイブリッド車両1を惰性走行させ、その車速をまずは制御速度範囲VR1の停止終了車速V1Lまで低下させ、次いで、車速センサ102の検出車速が停止終了車速V1Lに達すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm1の間、ハイブリッド車両1を加速させる(駆動出力状態)。そして、その加速によって車速が加速終了車速V1Hに達すると、モータMG2からの出力を停止させて所定の惰性走行の持続時間t2だけハイブリッド車両1を惰性走行させる(出力停止状態)。
【0168】
次いで、共振回避期間に入り、車速が制御速度範囲VR2の停止終了車速V1Laまで低下すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を出力させ、所定の加速走行の持続時間tm2の間、または、車速センサ102の検出車速が加速終了車速V1Hに達するまでの間、ハイブリッド車両1を加速させる(駆動出力状態)。
【0169】
そして、その加速によって車速が加速終了車速V1Hに達すると、モータMG2からの出力を停止させて、所定の惰性走行の持続時間t3だけハイブリッド車両1を惰性走行させ、車速が制御速度範囲VR3の停止終了車速V1Lbまで低下すると、出力停止状態を解除して、モータMG2から出力値Pm1の動力を再度出力させる。それ以降は、第1の断続運転条件下と同様に、車速が制御速度範囲VR1の範囲内で変化するように制御される。
【0170】
本実施形態では、このように、共振判定部111によって特定の振動の周波数がハイブリッド車両1の共振周波数域内に入ると判定されることを条件として、通常断続運転時におけるハイブリッド駆動装置20のモータMG2等の出力の断続周期(tm1+t1)から一時的な共振回避期間内においてのみ、共振回避制御時の断続周期((tm2+t2)または(tm3+t3)<tm1+t1)に変更される。したがって、断続運転による車速変動の位相のずれがなく、しかも、共振回避制御期間内に通常の断続運転時の制御速度範囲VR1から外れるような車速変化がなく、共振回避制御のための断続運転条件の変化による乗り心地の低下が生じ難い。
【0171】
本実施形態においても、ハイブリッド駆動装置20の断続運転による低燃費走行を実現するとともに、その低燃費走行中に、原動機の断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができ、ハイブリッド車両1の乗り心地を向上させることのできる車両用制御装置30を提供することができる。
【0172】
なお、上述の各実施形態においては、モータMG1、MG2およびエンジン10のうち少なくとも1つからの動力を基に走行駆動力を発生させるハイブリッド駆動装置20を備えていたが、少なくとも1つの電動機(電動モータ)を走行駆動用の原動機として備えた車両であれば、電気自動車であってもハイブリッド車両であっても、本発明を適用することができる。また、動力伝達機構の一部を構成する減速機構70は、図1に示すものに限らず、他のギヤ構成を採ることができることは勿論であるし、変速機を含んで構成されてもよい。
【0173】
また、モータMG1、MG2よびエンジン10のうちいずれか1つまたは複数の原動機の組合せであるかによって、共振回避制御を、その原動機の種類(組合せを含む)に応じて選択できるように複数組の第1の断続運転条件および第2の断続運転条件を設定することもできる。
【0174】
以上説明したように、本発明に係る車両用制御装置は、断続運転のための原動機の出力変動に伴う特定の振動の周波数が車両の共振周波数域内に入ると判定されると、その特定の振動の周波数が車両の共振周波数域から外れるように、原動機の断続運転条件が通常とは異なる条件に変更される。したがって、原動機の断続運転に起因する振動や騒音が車両の共振周波数域で悪化することを有効に抑制して、原動機の断続運転による低燃費走行中にその断続運転に起因する比較的長周期の振動や騒音を有効に低減させることができる車両用制御装置を提供することができるという効果を奏する。このような本発明は、走行駆動用の原動機として少なくとも電動機を備えた車両に装備される車両用制御装置、特にその原動機のエネルギ消費量を抑える制御を実行する車両用制御装置全般に有用である。
【符号の説明】
【0175】
1 ハイブリッド車両(車両)
2 走行駆動車輪(駆動輪)
3 ドライブシャフト(駆動軸)
10 エンジン(内燃機関)
20 ハイブリッド駆動装置
30 車両用制御装置
40 動力分割統合機構(動力伝達機構)
40a 第1の遊星歯車機構
40c 第2の遊星歯車機構
49 カウンタドライブギヤ
51、52 ロータ
53、54 ステータ
60 モータECU
70 減速機構(動力伝達機構)
80 差動機構(動力伝達機構)
100 HVECU(ハイブリッド駆動システム制御用の電子制御ユニット)
101 アクセルポジションセンサ
102 車速センサ
103 EV走行選択スイッチ(電気自動車走行選択スイッチ)
105 二次電池(ハイブリッド駆動用のバッテリ)
106 昇圧コンバータ
107 電池ECU
111 共振判定部
112 断続運転条件変更部
112a 条件記憶メモリ
MG1、MG2 モータ(モータジェネレータ、電動機)
Pm1、Pm2、Pm3 出力値
t1、t2、t3 惰性走行の持続時間
tm1、tm2、tm3 加速走行の持続時間
V1H 加速終了車速(上限車速)
V1H´ 別の加速終了車速(上限車速)
V1L 停止終了車速(下限車速)
V1L´、V1La、V1Lb 別の停止終了車速(下限車速)
V1S 目標車速
VR1、VR2、VR3 制御速度範囲(車速変動範囲)
【特許請求の範囲】
【請求項1】
要求出力に応じて制御される原動機と該原動機の出力に応じた走行駆動力を発生させる動力伝達機構とを備えるとともに前記原動機が少なくとも電動機で構成されている車両に装備され、
前記要求出力が予め設定された変動幅内に保持されていることを条件に、前記原動機の出力を断続させる断続運転を実行して、前記車両を前記走行駆動力で加速する加速走行と前記車両を惰性で走行させる惰性走行とを交互に実行させる車両用制御装置であって、
前記断続運転のための前記原動機の出力変動に伴う特定の振動の周波数が前記車両の共振周波数域内に入るか否かを判定する共振判定部と、該共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件に、前記特定の振動の周波数が前記共振周波数域から外れるように前記断続運転の条件を通常とは異なる条件に変更する断続運転条件変更部と、を備えたことを特徴とする車両用制御装置。
【請求項2】
前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速走行中における前記原動機の出力値と前記断続運転の実行期間中における前記原動機の出力の断続周期とのうち少なくとも一方を変更することを特徴とする請求項1に記載の車両用制御装置。
【請求項3】
前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速走行または前記惰性走行を少なくとも1回含むよう予め設定された共振回避期間内に、前記断続運転の条件を前記通常とは異なる条件に変更することを特徴とする請求項1または請求項2に記載の車両用制御装置。
【請求項4】
前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速走行中の前記原動機の出力値を通常の出力値より増加させることを特徴とする請求項2または請求項3に記載の車両用制御装置。
【請求項5】
前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記断続運転の実行期間中における前記原動機の出力の断続周期を通常の断続周期より短くすることを特徴とする請求項2ないし請求項4のうちいずれか1の請求項に記載の車両用制御装置。
【請求項6】
前記断続運転の条件が、前記断続運転の実行期間中に前記加速走行毎の前記原動機の運転状態を終了させる加速終了車速と、前記断続運転の実行期間中に前記惰性走行毎の前記原動機の停止状態を終了させる停止終了車速と、のうち少なくとも一方を含み、
前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速終了車速と前記停止終了車速とのうち少なくとも一方を、前記特定の振動の周波数が前記共振周波数域から外れるように変更することを特徴とする請求項1ないし請求項5のうちいずれか1の請求項に記載の車両用制御装置。
【請求項7】
前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速終了車速を通常の加速終了車速よりも低い車速に変更することを特徴とする請求項6に記載の車両用制御装置。
【請求項8】
前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記停止終了車速を通常の停止終了車速よりも高い車速に変更することを特徴とする請求項6または請求項7に記載の車両用制御装置。
【請求項9】
前記断続運転条件変更部は、前記断続運転の条件として、前記特定の振動の周波数が前記共振周波数域から外れる通常時に設定される第1の断続運転条件と、前記特定の振動の周波数が前記共振周波数域内に入るときに設定される第2の断続運転条件と、を読み出し可能に記憶した条件記憶メモリを有していることを特徴とする請求項1ないし請求項8のうちいずれか1の請求項に記載の車両用制御装置。
【請求項1】
要求出力に応じて制御される原動機と該原動機の出力に応じた走行駆動力を発生させる動力伝達機構とを備えるとともに前記原動機が少なくとも電動機で構成されている車両に装備され、
前記要求出力が予め設定された変動幅内に保持されていることを条件に、前記原動機の出力を断続させる断続運転を実行して、前記車両を前記走行駆動力で加速する加速走行と前記車両を惰性で走行させる惰性走行とを交互に実行させる車両用制御装置であって、
前記断続運転のための前記原動機の出力変動に伴う特定の振動の周波数が前記車両の共振周波数域内に入るか否かを判定する共振判定部と、該共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件に、前記特定の振動の周波数が前記共振周波数域から外れるように前記断続運転の条件を通常とは異なる条件に変更する断続運転条件変更部と、を備えたことを特徴とする車両用制御装置。
【請求項2】
前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速走行中における前記原動機の出力値と前記断続運転の実行期間中における前記原動機の出力の断続周期とのうち少なくとも一方を変更することを特徴とする請求項1に記載の車両用制御装置。
【請求項3】
前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速走行または前記惰性走行を少なくとも1回含むよう予め設定された共振回避期間内に、前記断続運転の条件を前記通常とは異なる条件に変更することを特徴とする請求項1または請求項2に記載の車両用制御装置。
【請求項4】
前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速走行中の前記原動機の出力値を通常の出力値より増加させることを特徴とする請求項2または請求項3に記載の車両用制御装置。
【請求項5】
前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記断続運転の実行期間中における前記原動機の出力の断続周期を通常の断続周期より短くすることを特徴とする請求項2ないし請求項4のうちいずれか1の請求項に記載の車両用制御装置。
【請求項6】
前記断続運転の条件が、前記断続運転の実行期間中に前記加速走行毎の前記原動機の運転状態を終了させる加速終了車速と、前記断続運転の実行期間中に前記惰性走行毎の前記原動機の停止状態を終了させる停止終了車速と、のうち少なくとも一方を含み、
前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速終了車速と前記停止終了車速とのうち少なくとも一方を、前記特定の振動の周波数が前記共振周波数域から外れるように変更することを特徴とする請求項1ないし請求項5のうちいずれか1の請求項に記載の車両用制御装置。
【請求項7】
前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記加速終了車速を通常の加速終了車速よりも低い車速に変更することを特徴とする請求項6に記載の車両用制御装置。
【請求項8】
前記断続運転条件変更部は、前記共振判定部によって前記特定の振動の周波数が前記共振周波数域内に入ると判定されることを条件として、前記停止終了車速を通常の停止終了車速よりも高い車速に変更することを特徴とする請求項6または請求項7に記載の車両用制御装置。
【請求項9】
前記断続運転条件変更部は、前記断続運転の条件として、前記特定の振動の周波数が前記共振周波数域から外れる通常時に設定される第1の断続運転条件と、前記特定の振動の周波数が前記共振周波数域内に入るときに設定される第2の断続運転条件と、を読み出し可能に記憶した条件記憶メモリを有していることを特徴とする請求項1ないし請求項8のうちいずれか1の請求項に記載の車両用制御装置。
【図1】


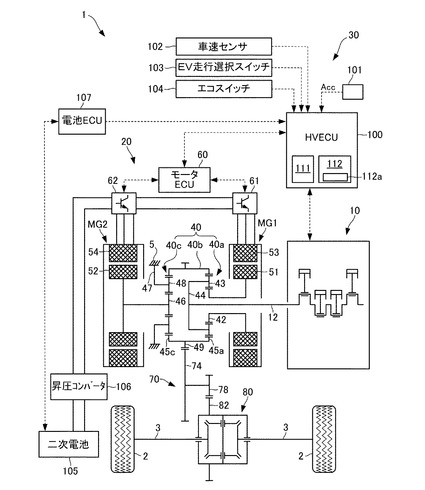
【図2】
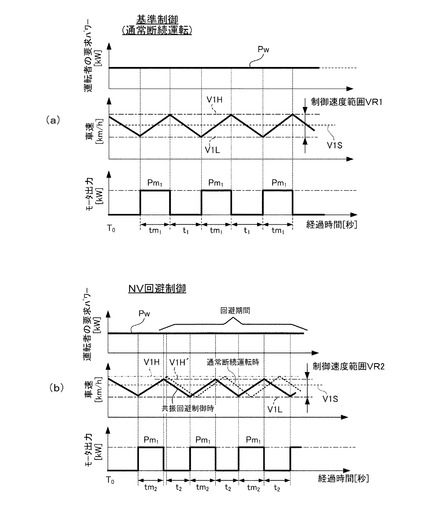
【図3】
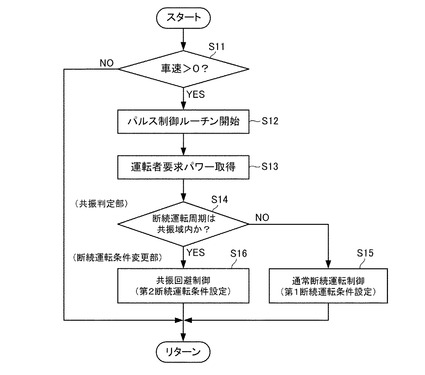
【図4】
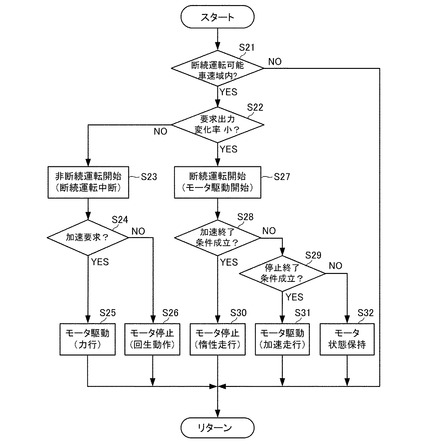
【図5】
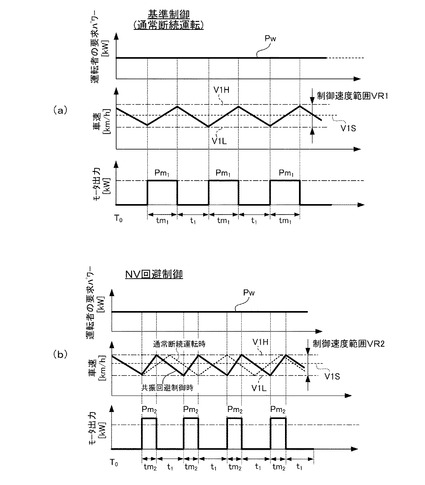
【図6】
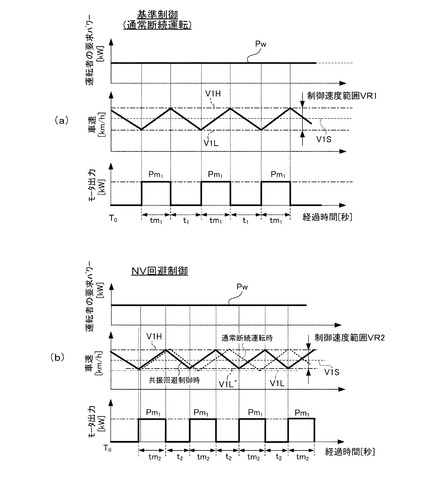
【図7】
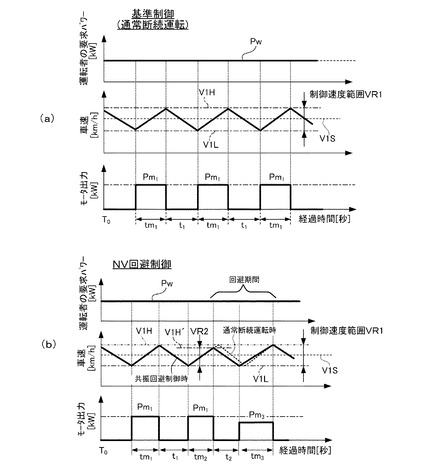
【図8】
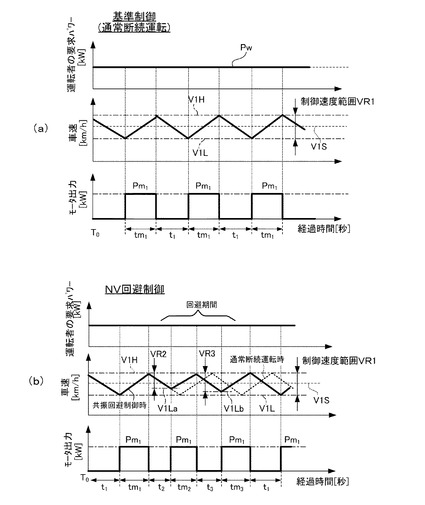
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2013−99088(P2013−99088A)
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願番号】特願2011−239195(P2011−239195)
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年5月20日(2013.5.20)
【国際特許分類】
【出願日】平成23年10月31日(2011.10.31)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]