
車両用制駆動力制御装置
【課題】 ブレーキ制御に対する駆動源のブレーキトルクの影響を効果的に抑制できる車両用制駆動力制御装置を提供する。
【解決手段】 エンジン39の出力により駆動する左右前輪FL,FRと、車両の状態に応じて車輪に作用する制動力を制御するHU31と、HU31をコントロールするブレーキCU32と、を備え、少なくともエンジン39に対してHU31が制動力を与えているときはエンジン39のブレーキトルクを低減させる。
【解決手段】 エンジン39の出力により駆動する左右前輪FL,FRと、車両の状態に応じて車輪に作用する制動力を制御するHU31と、HU31をコントロールするブレーキCU32と、を備え、少なくともエンジン39に対してHU31が制動力を与えているときはエンジン39のブレーキトルクを低減させる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両制動時のエンジンブレーキトルクをコントロールする車両用制駆動力制御装置に関する。
【背景技術】
【0002】
特許文献1には、ABS制御中にエンジンブレーキの影響による車輪速下ずりが発生した場合、エンジンをアイドルアップすることで減圧後の車輪速の早期回復を図る技術が開示されている。
【特許文献1】特開平1−249555号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記従来技術にあっては、単にアイドル回転をコントロールするだけでエンジンブレーキトルクを積極的にコントロールしていないため、ブレーキ制御に対するエンジンブレーキトルクの影響を効果的に抑制できない。
【0004】
本発明の目的は、ブレーキ制御に対する駆動源のブレーキトルクの影響を効果的に抑制できる車両用制駆動力制御装置を提供することにある。
【課題を解決するための手段】
【0005】
上記目的を達成するため、本発明の車両用制駆動力制御装置では、少なくとも車両の駆動源に対してブレーキユニットが制動力を与えているときは駆動源のブレーキトルクを低減させる。
【発明の効果】
【0006】
よって、本発明にあっては、ブレーキ制御に対する駆動源のブレーキトルクの影響を効果的に抑制できる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の車両用制駆動力制御装置を実現するための最良の形態を、図面に示す実施例に基づいて説明する。
【実施例1】
【0008】
まず、構成を説明する。
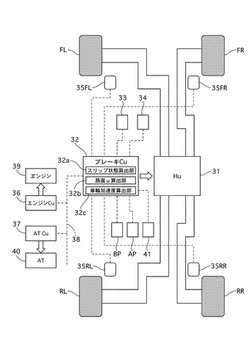
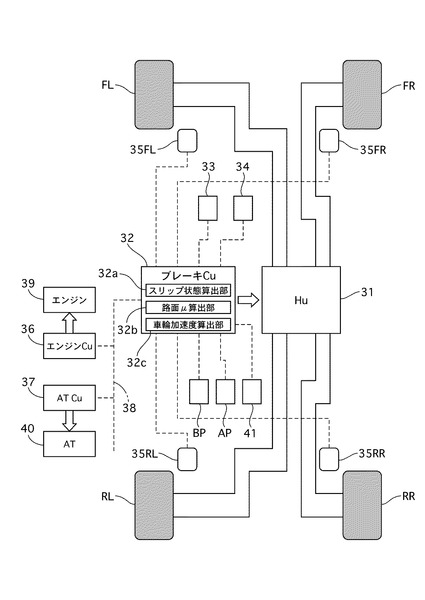
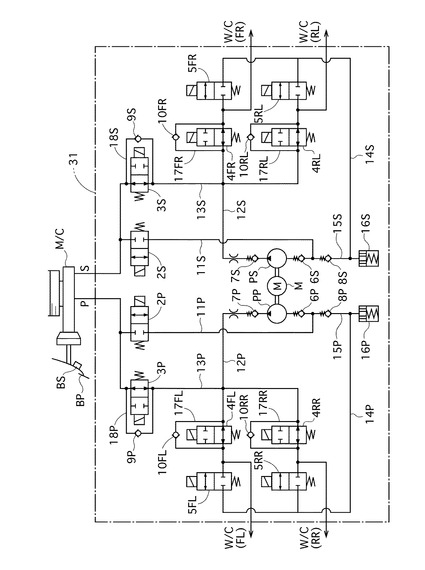
図1は実施例1の車両用制駆動力制御装置をシステム構成図、図2は実施例1の油圧ユニット(ブレーキユニットであり、以下、HU)31の油圧回路図である。実施例1の車両は、駆動源としてエンジン39を備え、エンジン39により左右前輪FL,FRを駆動するFF方式の車両である。また、HU31は、P系統とS系統との2系統からなる、X配管と呼ばれる配管構造となっている。
【0009】
HU31は、ブレーキコントロールユニット(以下、ブレーキCU)32からの指令に基づいて左前輪FLのホイルシリンダW/C(FL)、右後輪RRのホイルシリンダW/C(RR)、右前輪FRのホイルシリンダW/C(FR)、左後輪RLのホイルシリンダW/C(RL)の各液圧の保持、増圧または減圧を行う。
【0010】
ブレーキCU32は、コンバインセンサ33と、操舵角センサ34および各車輪速センサ35FL,35FR,35RL,35RRからの各情報と、エンジンコントロールユニット(以下、エンジンCU)36と、自動変速機コントロールユニット(以下、ATCU)37からCAN通信線38を通して得られる情報とに基づいて、制動制御実施の判断を行う。制動制御中は、ホイルシリンダ液圧の保持、増減圧指令を生成する。
【0011】
ブレーキペダルBPは、ドライバが制動を行う場合に操作され、操作量に応じて制動力を発生する。ブレーキスイッチBSは、ドライバがブレーキペダルBPを一定以上踏み込むことでONになる。ブレーキCU32は、ブレーキスイッチBSがONのときドライバブレーキ操作有り、OFFのときブレーキ操作無しと判断する。
【0012】
各ホイルシリンダW/Cは、対応する各車輪の制動を行う。コンバインセンサ33は、加速度センサとヨーレートセンサとを1パッケージ化したもので、加速度センサは、車両前後方向の加速度を検出し、ヨーレートセンサは、車両に作用するヨーレートを検出する。ここで、加速度センサは、路面勾配に応じた前後方向加速度を検出できるため、実施例1では、これを利用して勾配検出も行う。
【0013】
操舵角センサ34は、図示しないハンドルの回転角を検出する。各車輪速センサ35FL,35FR,35RL,35RRは、各車輪の車輪速を検出する。アクセルペダルAPは、ドライバの操作により車両の加減速コントロールを行う。エンジンCU36は、ドライバのアクセルペダル操作からエンジン39のコントロールを行う。また、エンジン39の発生トルクと、アクセルペダル操作量の情報を通信(CAN)で出力する。ATCU37は、自動変速機(AT)40のコントロールを行う。また、ギヤ位置信号(AT40のレンジポジション)を通信(CAN)で出力する。
【0014】
HU31のP系統には、左前輪のホイルシリンダW/C(FL)、右後輪のホイルシリンダW/C(RR)が接続され、S系統には、右前輪のホイルシリンダW/C(FR)、左後輪のホイルシリンダW/C(RL)が接続されている。また、P系統、S系統それぞれに、ポンプPPとポンプPSとが設けられ、このポンプPPとポンプPSは、1つのモータMによって駆動される。なお、ポンプは、プランジャポンプやギヤポンプ等が適宜搭載される。コストの面からいえば、プランジャポンプが望ましく、滑らかさ(制御性)からいえば、ギヤポンプが望ましい。
【0015】
マスタシリンダM/CとポンプPP,PS(以下、ポンプPと記載する)の吸入側とは、管路11P,11S(以下、管路11と記載する)によって接続されている。この各管路11上には、常閉型の電磁弁であるゲートインバルブ2P,2Sが設けられている。
【0016】
また、管路11上であって、ゲートインバルブ2P,2S(以下、ゲートインバルブ2と記載する)とポンプPとの間にはチェックバルブ6P,6S(以下、チェックバルブ6と記載する)が設けられ、この各チェックバルブ6は、ゲートインバルブ2からポンプPへ向かう方向へのブレーキ液の流れを許容し、反対方向の流れを禁止する。
【0017】
各ポンプPの吐出側と各ホイルシリンダW/Cとは、管路12P,12S(以下、管路12と記載する)によって接続されている。この各管路12上には、各ホイルシリンダW/Cに対応する常開型の電磁弁であるソレノイドインバルブ4FL,4RR,4FR,4RL(以下、ソレノイドインバルブ4と記載する)が設けられている。
【0018】
また、各管路12上であって、各ソレノイドインバルブ4とポンプPとの間にはチェックバルブ7P,7S(以下、チェックバルブ7と記載する)が設けられて、この各チェックバルブ7は、ポンプPからソレノイドインバルブ4へ向かう方向へのブレーキ液の流れを許容し、反対方向の流れを禁止する。
【0019】
さらに、各管路12には、各ソレノイドインバルブ4を迂回する管路17FL,17RR,17FR,17RL(以下、管路17と記載する)が設けられ、この管路17には、チェックバルブ10FL,10RR,10FR,10RL(以下、チェックバルブ10と記載する)が設けられている。この各チェックバルブ10は、ホイルシリンダW/CからポンプPへ向かう方向へのブレーキ液の流れを許容し、反対方向の流れを禁止する。
【0020】
マスタシリンダM/Cと管路12とは管路13P,13S(以下、管路13と記載する)によって接続され、管路12と管路13とはポンプPとソレノイドインバルブ4との間において合流する。この各管路13上には、常開型の電磁弁であるゲートアウトバルブ3P,3S(以下、ゲートアウトバルブ3と記載する)が設けられている。
【0021】
また各管路13には、各ゲートアウトバルブ3を迂回する管路18P,18S(以下、管路18と記載する)が設けられ、この管路18には、チェックバルブ9P,9S(以下、チェックバルブ9と記載する)が設けられている。この各チェックバルブ9は、マスタシリンダM/C側からホイルシリンダW/Cへ向かう方向のブレーキ液の流れを許容し、反対方向の流れを禁止する。
【0022】
ポンプPの吸入側にはリザーバ16P,16S(以下、リザーバ16と記載する)が設けられ、このリザーバ16とポンプPとは管路15P,15S(以下、管路15と記載する)によって接続されている。リザーバ16とポンプPとの間にはチェックバルブ8P,8S(以下、チェックバルブ8と記載する)が設けられて、この各チェックバルブ8は、リザーバ16からポンプPへ向かう方向のブレーキ液の流れを許容し、反対方向の流れを禁止する。
【0023】
ホイルシリンダW/Cと管路15とは管路14P,14S(以下、管路14と記載する)によって接続され、管路14と管路15とはチェックバルブ8とリザーバ16との間において合流する。この各管路14には、それぞれ常閉型の電磁弁であるソレノイドアウトバルブ5FL,5RR,5FR,5RL(以下、ソレノイドアウトバルブ5と記載する)が設けられている。
【0024】
ブレーキCU32は、各センサの入力信号およびドライバのブレーキペダル操作状態等に基づいてドライバの操作に従う通常ブレーキ制御の演算と、アンチスキッドブレーキ制御(ABS)、車両挙動安定化制御(VDC)、車間距離制御および障害物回避制御等車両の情報を用いてタイヤのスリップや車両挙動を制御するための演算を行い、車両として必要な制動力(全ての輪)を算出し、各車輪に必要な制動力目標値を演算する。ブレーキCU32は、ABS制御を行うアンチスキッドブレーキコントロールユニットしての機能を有する。
【0025】
また、ブレーキCU32は、急な降坂路(例えば、斜度10%)で車速が目標車速(例えば、7km/h)を超えないように、自動制動(実施例1では、液圧ブレーキとエンジンブレーキとを用いる。)を作動させる、いわゆるヒルディセントコントロール(HDC)を実施する定速走行装置に適用される。HDCは、例えば、ドライバにより操作されるHDCスイッチ41のON、斜度≧10%、車速≦所定車速(例えば、10km/h)およびAT40の変速段が最ロー(1速)の各条件を全て満たした場合に作動する。
【0026】
ブレーキCU32は、スリップ状態算出部32aと、路面μ算出部32bと、車輪加速度算出部32cを備える。スリップ状態算出部32aは、スリップ状態として、駆動輪(前輪)平均速度を算出する。路面μ算出部32bは、路面μ(路面摩擦係数)を算出する。車輪加速度算出部32cは、駆動輪平均加速度を算出する。これら駆動輪平均速度、路面μおよび駆動輪平均加速度は、上記各制御の制動力目標値を決めるパラメータとして適宜用いられる。
【0027】
ブレーキCU32は、ABS制御に対するエンジン39のブレーキトルク、すなわちエンジンブレーキトルクの影響を抑制することを目的とし、ABS制御中はエンジンブレーキトルクを低減する目標エンジントルク(最適エンジンブレーキトルク)としてのエンジントルク要求値を作成し、作成したエンジントルク要求値を要求信号としてエンジンCU36へ出力する。
エンジンCU36は、ブレーキCU32からの要求信号に応じた目標エンジン回転数を演算し、演算した目標エンジン回転数となるようにエンジン回転数を調節することで、エンジントルクをコントロールする。
また、ブレーキCU32は、ABS制御中、路面μ算出部32bにより高μ→低μのμジャンプが発生した場合、車両を加速させるエンジントルク要求値をエンジンCU36へ出力する。
【0028】
[エンジントルク要求値作成処理]
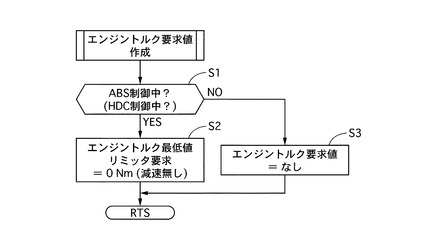
図3は、実施例1のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、この処理は、所定周期で繰り返し実行される。
ステップS1では、ABS制御中であるか否かを判定する。YESの場合にはステップS2へ移行し、NOの場合にはステップS3へ移行する。
ステップS2では、エンジントルク要求値を「0Nm」とし、リターンへ移行する。
ステップS3では、エンジントルク要求値を「なし」とし、リターンへ移行する。
【0029】
次に、作用を説明する。
[エンジンブレーキトルク低減作用]
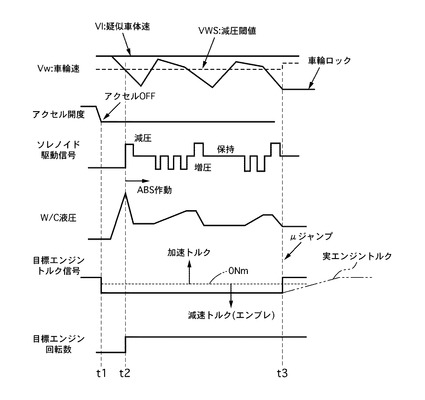
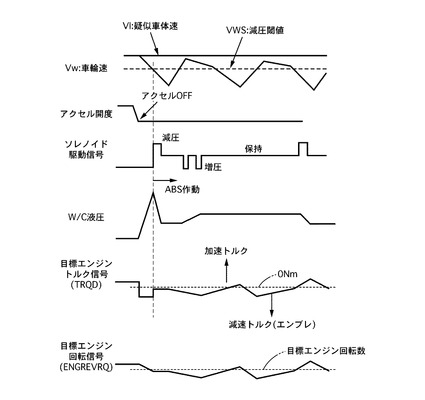
図4は、従来のABS制御作動時のタイムチャートである。従来は、加速、または一定速走行からエンジンブレーキにて減速するために、エンジンCUは、時点t1のアクセルOFF(アクセル開度ゼロ)で目標エンジントルク信号は減速側のトルクとなり、エンジンブレーキトルクが発生する。その後、時点t2でABS制御が作動した場合も、目標エンジントルク信号は一定であるため、エンジンブレーキトルクは不変である。
【0030】
なお、従来制御では、ABS制御中の疑似車体速VIの下ずり防止を図るために、目標エンジン回転を高める、いわゆるアイドルアップを行っている。ここで、「疑似車体速VIの下ずり」とは、車輪速度が実車体速よりも低くなることで、車輪速度に基づいて設定する疑似車体速が適正値よりも低く設定されることをいう。
【0031】
ところが、上記従来技術では、単にアイドル回転をコントロールするのみであるため、ABS制御に対するエンジンブレーキトルクの影響により、以下のような問題があった。
例えば、アイドル回転数が低いディーゼルエンジン車でのABSインギヤ制動時(インギヤ=ATのギヤが入っている状態)には、低速時に車輪スリップによりエンジン回転がアイドル回転以下となる場合がある。このとき、エンジンCU側で加速側のエンジントルクを発生させてアイドル回転を維持しようとしても、ABS制御サイクルに対してエンジントルクの立ち上がりが遅いため、車輪がロックしてエンジンストールに至る可能性がある。
【0032】
また、低μ路での制動時に過度のエンジンブレーキトルクが発生すると、ABS制御でブレーキ液の減圧を行ったとしても、車輪速が十分に復帰せず、過スリップが継続して車輪ロック時間が長くなる。この結果、タイヤ横力を十分に確保できず、走行安定性の維持が困難となる。
【0033】
さらに、図4の時点t3で高μ→低μのμジャンプが発生した場合、減速トルクが出力されたままであるため、時点t3で低μ路との判断によりエンジントルクを立ち上げたとしても、加速トルクの発生が間に合わず、車輪ロックの継続によりエンジンストールが発生するおそれがある。
【0034】
これに対し、実施例1では、ブレーキCU32において、ABS制御中であるか否かを判定し、ABS制御中であればエンジンCU36に対して目標エンジントルクを0Nmとするエンジントルク要求値を出力する(ステップS1→ステップS2)。一方、ABS制御中でなければ、エンジントルク要求値を出力しない(ステップS1→ステップS3)。
【0035】
すなわち、ブレーキCU32は、ABS制御の初期段階からエンジンCU36に対しエンジンブレーキトルクを小さくするエンジントルク要求値を出力し、エンジンブレーキトルクの影響を小さくしておくことで、十分なタイヤ横力を確保できない車輪ロック時間を短くでき、走行安定性を確保できる。
【0036】
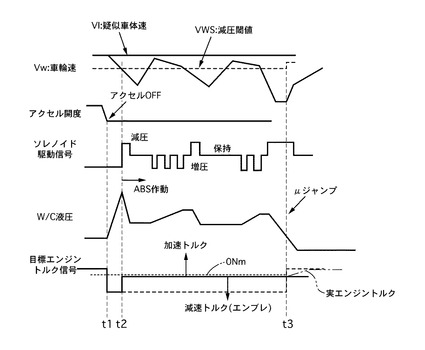
図5は、実施例1のABS制御作動時のタイムチャートであり、図中の実線は実施例1の目標エンジントルク、点線は従来の目標エンジントルクである。図5に示すように、ABSの作動開始から目標エンジントルクを0Nmとしてエンジンブレーキトルクを無くし、ロック傾向を小さくできるため、ABS制御に対するエンジンブレーキトルクの影響を効果的に抑制でき、エンジンストールの発生を防止できる。
【0037】
また、時点t3で高μ→低μのμジャンプが発生したとき、エンジンCU36は、ブレーキCU32からの要求に応じて車両を加速させるエンジントルクを出力させるが、時点t3直前の目標エンジントルク信号はゼロであるため、図5の一点鎖線で示すように、エンジントルクを素早く立ち上げることができ、ABSの減圧遅れによる車輪ロックを小さくできる。このため、速やかに車輪速の復帰を行うことが可能となり、車輪ロックの継続によるエンジンストールを防止できる。
【0038】
以下に、実施例1の効果を示す。
(1) 駆動源(エンジン39)の出力により駆動する左右前輪FL,FRと、車両の状態に応じて車輪に作用する制動力を制御するHU31と、HU31をコントロールするブレーキCU32と、を備え、少なくともエンジン39に対してHU31が制動力を与えているときはエンジン39のブレーキトルク(エンジンブレーキトルク)を低減させる。これにより、ブレーキ制御に対するエンジンブレーキトルクの影響を効果的に抑制できる。
【0039】
(2) ブレーキCU32は、エンジントルク要求値を演算してエンジンCU36へ出力し、エンジンCU36は、エンジントルク要求値となるようにエンジン39をコントロールする。これにより、ブレーキ制御に適切なエンジントルクを得られるため、制動性能の向上を図ることができる。
また、ブレーキCU32は、既存のCAN通信線38を用いたCAN信号によりエンジンCU36とのデータ送受信を行っているため、新たに信号線を追加することなく上記効果を得られる。
【0040】
(3) エンジントルク要求値を0Nmとしたため、エンジントルクを0Nmとすることで制動性能の向上を図ることができる。
【0041】
(4) 路面μを算出する路面μ算出部32bを備え、エンジンCU36は、算出された路面μが高μから低μに変化したとき、車両を加速させるエンジントルクを出力するため、高μ路から低μ路へのμジャンプ時におけるエンジンストールを防止できる。
【0042】
(5) HU31は、車両の下り走行時に自動制動を行う定速走行装置に適用されるため、低速走行時のエンジンブレーキトルクをコントロールすることで、エンジンストールを抑制でき、下り坂での極低速走行が可能となる。
【0043】
(6) エンジン39の状態をコントロールするエンジンCU36と、車両の状態に応じて車輪に作用する制動力を制御するHU31と、HU31をコントロールするブレーキCU32と、を備え、エンジンCU36は、車輪のうち少なくとも駆動輪である左右前輪FL,FRに対するHU31の作動時、ブレーキCU32の出力信号に応じてエンジンブレーキトルクを低減するようコントロールする。これにより、ブレーキ制御に対するエンジンブレーキトルクの影響を効果的に抑制できる。
【0044】
(7) ブレーキCU32は、エンジントルク要求値を演算し、ブレーキCU32の出力信号は、エンジントルク要求値であって、エンジンCU36は、エンジントルク要求値となるようにエンジン39をコントロールする。これにより、ブレーキ制御に適切なエンジントルクを得られるため、制動性能の向上を図ることができる。
【実施例2】
【0045】
実施例2は、ABS制御中はAT40のギヤ位置をニュートラルとする例である。なお、全体構成については、図1,2に示した実施例1と同様であるため、図示ならびに説明を省略する。
【0046】
ブレーキCU32は、ABS制御中、AT40のギヤ位置をニュートラルとするAT制御要求信号をATCU37へ送信する。
ATCU37は、ブレーキCU32からのAT制御要求信号に応じてAT40のギヤ位置をニュートラルとする。
【0047】
[エンジントルク要求値作成処理]
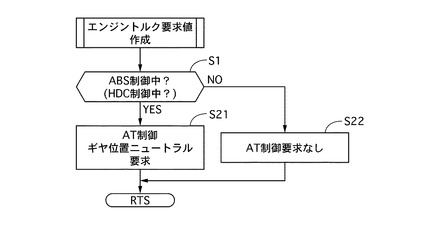
図6は、実施例2のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、図3のフローチャートと同一の処理を行うステップには、同一のステップ番号を付して説明を省略する。
ステップS21では、AT制御要求を「ギヤ位置ニュートラル」とし、リターンへ移行する。
ステップS22では、AT制御要求を「なし」とし、リターンへ移行する。
【0048】
次に、作用を説明する。
[エンジンブレーキトルク低減作用]
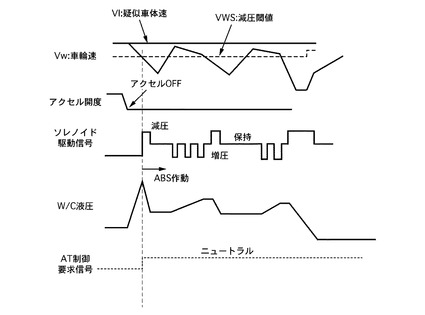
図7は、実施例2のABS制御作動時のタイムチャートであり、実施例2では、ABS制御の作動開始と同時にAT40のギヤ位置をニュートラルとする(ステップS1→ステップS21)。このため、エンジンブレーキトルクが0Nm相当となり、実施例1と同様、ロック傾向を小さくできるため、ABS制御に対するエンジンブレーキトルクの影響を効果的に抑制でき、エンジンストールの発生を防止できる。
【0049】
以下に、実施例2の効果を示す。
(8) エンジンブレーキトルクの低減は、AT40のギヤ位置をニュートラルとすることにより実施されるため、ブレーキ制御に対するエンジンブレーキトルクの影響を効果的に抑制できる。
【実施例3】
【0050】
実施例3は、左右前輪FL,FRのスリップ状態に応じてエンジンブレーキトルクをコントロールする例である。なお、全体構成については、図1,2に示した実施例1と同様であるため、図示ならびに説明を省略する。
【0051】
[エンジントルク要求値作成処理]
図8は、実施例3のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、図3のフローチャートと同一の処理を行うステップには、同一のステップ番号を付して説明を省略する。
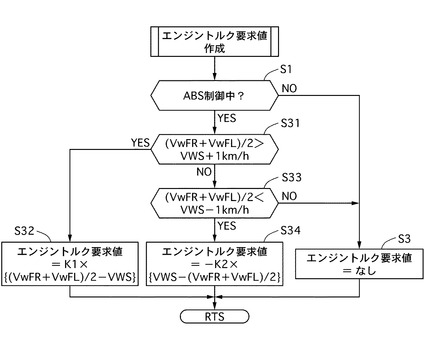
【0052】
ステップS31では、スリップ状態算出部32aにより算出された駆動輪平均速度(右前輪車輪速VwFRと左前輪車輪速VwFLとの平均値)が、目標スリップ率が得られる車輪速度である目標スリップ率速度VWSに所定値を(例えば、1km/h)を加算した値よりも大きいか否かを判定する。YESの場合にはステップS32へ移行し、NOの場合にはステップS33へ移行する。
【0053】
ステップS32では、エンジントルク要求値(第1のエンジンブレーキトルク)を下記の式(1)から算出し、リターンへ移行する。
エンジントルク要求値=K1×{(VwFR+VwFL)/2-VWS} …(1)
ここで、K1は係数である。
【0054】
ステップS33では、駆動輪平均速度が、目標スリップ率が得られる車輪速度である目標スリップ率速度VWSから所定値を(例えば、1km/h)を減算した値よりも小さいか否かを判定する。YESの場合にはステップS34へ移行し、NOの場合にはステップS3へ移行する。
ステップS34では、エンジントルク要求値(第2のエンジンブレーキトルク)を下記の式(2)から算出し、リターンへ移行する。
エンジントルク要求値=-K2×{VWS-(VwFR+VwFL)/2} …(2)
ここで、K2は係数である。
実施例3では、目標スリップ率速度VWS±1km/hの範囲に対応する目標スリップ率の範囲を、第1のスリップ率と称する。
【0055】
次に、作用を説明する。
[スリップ率に応じたエンジンブレーキトルク変更作用]
実施例3では、ABS制御時、駆動輪平均速度(VwFR+VwFL)/2を求め、この値とオフセット値を加算または減算した目標スリップ率速度VWSとを比較し、スリップが過小であると判定した場合は、エンジントルク要求値を目標スリップ率速度VWSと駆動輪平均速度との差に応じたエンジンブレーキトルクとする(ステップS1→ステップS31→ステップS33→ステップS34)。逆に、スリップが過多であると判定した場合は、エンジントルク要求値を駆動輪平均速度と目標スリップ率速度VWSとの差に応じた加速トルクとする(ステップS1→ステップS31→ステップS32)。
【0056】
図9は、実施例3のABS制御作動時のタイムチャートであり、実施例3では、エンジンCU36において、ブレーキCU32で作成されたエンジントルク要求値に基づいてエンジントルクを制御することにより、駆動輪平均速度が目標スリップ率速度VWSとなるように、すなわち駆動輪のスリップ率が第1のスリップ率(目標スリップ率の範囲内)となるように目標エンジントルクが設定され、エンジントルクが調整される。
【0057】
ここで、ABS制御では、駆動輪のスリップ率が適正範囲を超えたとき(目標スリップ率の上限を超えたとき)ホイルシリンダ液圧を減圧し、適正範囲を下回ったとき(目標スリップ率の下限を下回ったとき)ホイルシリンダ液圧を増圧する。そして、スリップ率が適正範囲内にある場合、ホイルシリンダ液圧は保持される。
【0058】
そこで、実施例3では、スリップ率が適正範囲内に収まるようにエンジントルクを調整することで、ホイルシリンダW/Cの増減圧頻度を下げることができる。つまり、実施例3では、駆動輪のスリップ状態をエンジントルクにより補助的に調整することにより、ブレーキCU32によるABS制御の負荷を低減できる。
【0059】
この結果、HU31のバルブ動作音およびホイルシリンダW/Cの液圧変動を小さくでき、ブレーキシステムの作動音および振動を低減できる。また、過スリップの抑制による制動距離の短縮化が可能となるため、ドライバの意図する制動力が得られ、減速フィーリングの向上を図ることができる。
【0060】
以下に、実施例3の効果を示す。
(9) 車輪のスリップ状態を算出するスリップ状態算出部32aを備え、エンジンCU36は、算出された車輪のスリップ状態に応じてエンジンブレーキトルクをコントロールし、スリップ率が第1のスリップ率以上のときはエンジントルク要求値を第1のエンジンブレーキトルクとし、スリップ率が第1のスリップ率よりも小さいときはエンジントルク要求値を第1のエンジンブレーキトルクよりも大きな第2のエンジンブレーキトルクとする。これにより、スリップ状態に応じてエンジントルク要求値を設定でき、制動距離の短縮化を図ることができる。
【0061】
(10) 第1のエンジンブレーキトルクは、加速側のエンジントルクであり、第2のエンジンブレーキトルクは、減速側のエンジントルクであるため、制動性能の向上を図ることができる。
【0062】
(11) エンジン39の出力をコントロールするエンジンCU36と、車輪のスリップ状態に応じてホイルシリンダ液圧を増減圧するアンチスキッドブレーキコントロールユニットとしてのブレーキCU32と、を備え、エンジンCU36は、少なくとも駆動輪に対してABSが作動しているときには車輪のスリップ状態に応じてエンジンブレーキトルクをコントロールする。これにより、ブレーキ制御に対するエンジンブレーキトルクの影響を効果的に抑制できる。
【実施例4】
【0063】
実施例4は、車輪加速度に応じてエンジンブレーキトルクをコントロールする例である。なお、全体構成については、図1,2に示した実施例1と同様であるため、図示ならびに説明を省略する。
【0064】
[エンジントルク要求値作成処理]
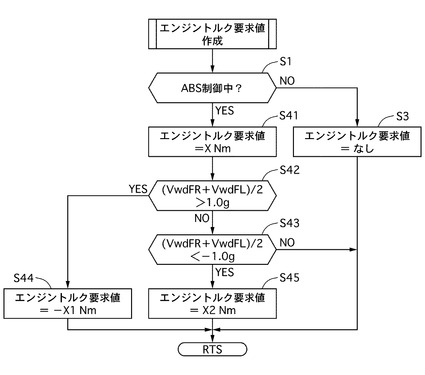
図10は、実施例4のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、図3のフローチャートと同一の処理を行うステップには、同一のステップ番号を付して説明を省略する。
【0065】
ステップS41では、エンジントルク要求値を「X Nm」とし、ステップS42へ移行する。ここで、Xは初期値であり、駆動輪のスリップ率が目標スリップ率付近または車輪減速度が目標減速度付近となる目標エンジントルクとする。
ステップS42では、車輪加速度算出部32cにより算出された駆動輪平均加速度(右前輪車輪加速度VwdFRと左前輪車輪加速度VwdFLとの平均値)が、1.0gよりも大きいか否かを判定する。YESの場合にはステップS44へ移行し、NOの場合にはステップS43へ移行する。
【0066】
ステップS43では、駆動輪平均加速度が-1.0gよりも小さいか否かを判定する。YESの場合にはステップS45へ移行し、NOの場合にはリターンへ移行する。
ステップS44では、エンジントルク要求値を「-X1 Nm」とし、リターンへ移行する。ここで、X1は、駆動輪のスリップ率が目標スリップ率付近または車輪減速度が目標減速度付近となるような目標エンジントルクとする。
ステップS45では、エンジントルク要求値を「X2 Nm」とし、リターンへ移行する。ここで、X2は、駆動輪のスリップ率が目標スリップ率付近または車輪減速度が目標減速度付近となる目標エンジントルクとする。
【0067】
次に、作用を説明する。
[減速度に応じたエンジンブレーキトルク変更作用]
実施例4では、駆動輪平均加速度に応じてエンジントルク要求値を変更する。駆動輪平均加速度が減速傾向のときは加速側のエンジントルクX2 Nmとし(ステップS1→ステップS41→ステップS42→ステップS43→ステップS45)、加速傾向のときは減速側のエンジントルク-X1 Nmとする(ステップS1→ステップS41→ステップS42→ステップS44)。すなわち、実施例4では、駆動輪のスリップ率が目標スリップ率付近となるように、または車輪減速度が目標減速度付近となるように目標エンジントルクが設定され、エンジントルクが調整される。
【0068】
以下に、実施例4の効果を示す。
(12) 車輪の加速度を算出する車輪加速度算出部32cを備え、エンジントルク要求値は、算出された車輪加速度が減速傾向のときは加速側のエンジントルクであり、加速傾向のときは減速側のエンジントルクである。これにより、駆動輪加速度の傾向に応じてエンジントルク要求値を設定でき、制動距離の短縮化を図ることができる。
【0069】
(13) エンジン39の出力をコントロールするエンジンCU36と、車輪のスリップ状態に応じてホイルシリンダ液圧を増減圧するアンチスキッドブレーキコントロールユニットとしてのブレーキCU32と、を備え、エンジンCU36は、少なくとも駆動輪に対してABSが作動しているときには車輪の加速度の状態に応じてエンジンブレーキトルクをコントロールする。これにより、ブレーキ制御に対するエンジンブレーキトルクの影響を効果的に抑制できる。
【実施例5】
【0070】
実施例5は、駆動輪の車輪速度と目標車輪速度との偏差、および駆動輪の車輪復帰加速度と目標車輪復帰加速度との偏差に基づいてエンジンブレーキトルクをPD制御する例である。なお、全体構成については、図1,2に示した実施例1と同様であるため、図示ならびに説明を省略する。
【0071】
[エンジントルク要求値作成処理]
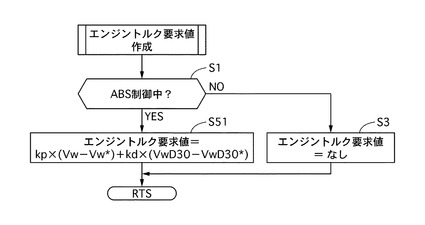
図11は、実施例5のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、図3のフローチャートと同一の処理を行うステップには、同一のステップ番号を付して説明を省略する。
【0072】
ステップS51では、エンジントルク要求値を下記の式(3)に基づいて設定し、リターンへ移行する。
エンジントルク要求値=kp×(Vw-Vw*)+kd×(VwD30-VwD30*) …(3)
ここで、kpは比例ゲイン、kdは微分ゲイン、Vwは車輪速度、Vw*は目標車輪速度、VwD30は車輪復帰加速度(減圧により車輪速度Vwが車体速度に向けて復帰する加速度)、VwD30*は目標車輪復帰加速度である。
【0073】
以上のように、実施例5では、車輪速度Vwと目標車輪速度Vw*との偏差、および車輪復帰加速度VwD30と目標車輪復帰加速度VwD30*との偏差に応じてエンジントルク要求値を設定しているため、車輪速度Vwおよび車輪復帰加速度VwD30をABS制御の目標車輪速度Vw*および目標車輪復帰加速度VwD30*に近づけることができ、過スリップの抑制による制動距離の短縮化を図ることができる。
【実施例6】
【0074】
実施例6は、目標減速度に応じてエンジンブレーキトルクをコントロールする例である。なお、全体構成については、図1,2に示した実施例1と同様であるため、図示ならびに説明を省略する。
【0075】
[エンジントルク要求値作成処理]
図12は、実施例6のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、図3のフローチャートと同一の処理を行うステップには、同一のステップ番号を付して説明を省略する。
【0076】
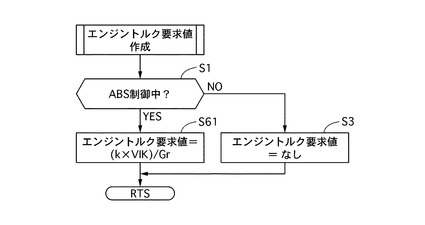
ステップS61では、エンジントルク要求値を下記の式(4)に基づいて設定し、リターンへ移行する。
エンジントルク要求値=(k×VIK)/Gr …(4)
ここで、kは係数、VIKは車両減速度、Grはエンジン39−車輪間のギヤ比である。
【0077】
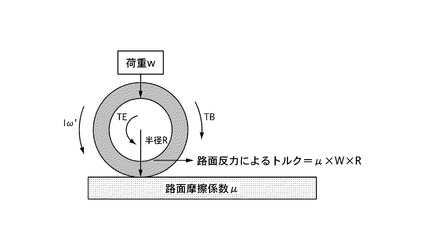
図13は、ABS制御中の車輪(駆動輪)の状態を示す図であり、車輪には、駆動トルク(エンジントルク×ギヤ比Gr)TE、ブレーキトルクTB、路面反力によるトルクμwR(μ:路面摩擦係数、w:輪荷重、R:車輪の有効半径)がそれぞれ作用する。よって、慣性モーメントI、車輪回転加速度ω'のとき、下記の式(5)が成立する。
Iω'=μwR+TE-TB …(5)
【0078】
ここで、路面μの大きさを目標減速度とおくと、ブレーキトルクBTと路面反力によるトルクμwRとが釣り合うようにエンジントルク要求値を設定することで、ABS作動頻度が少なくなり、ブレーキシステムの作動音および振動を低減できる。また、過スリップの抑制による制動距離の短縮化が可能となるため、ドライバの意図する制動力が得られ、減速フィーリングの向上を図ることができる。つまり、実施例6では、TB=μwRとし、μ=VIKとなるよう、式(4)に基づいてエンジントルク要求値を設定しているため、ブレーキシステムにおける作動音および振動の低減と、減速フィーリングの向上とを共に実現できる。
【実施例7】
【0079】
実施例7では、ブレーキCU32からエンジンCU36へ直接目標エンジン回転数を要求する例である。なお、全体構成については、図1,2に示した実施例1と同様であるため、図示ならびに説明を省略する。
【0080】
ブレーキCU32は、ABS制御中、目標スリップ率速度VWSに応じて目標エンジン回転数であるエンジン回転数要求値を作成し、作成したエンジン回転数要求値を要求信号としてエンジンCU36へ出力する。
エンジンCU36は、ブレーキCU32からの要求信号に応じてエンジン回転数をコントロールする。
【0081】
[エンジン回転数要求値作成処理]
図14は、実施例7のブレーキCU32で実行されるエンジン回転数要求値作成処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、図3のフローチャートと同一の処理を行うステップには、同一のステップ番号を付して説明を省略する。
【0082】
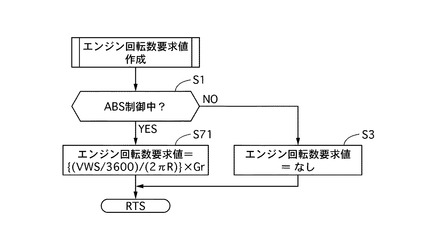
ステップS71では、エンジン回転数要求値を下記の式(6)に基づいて設定し、リターンへ移行する。
エンジン回転数要求値={(VWS/3600)/(2πR)}×Gr …(6)
【0083】
すなわち、実施例3のようにスリップ状態に応じてエンジントルクをコントロールする際、目標スリップ率速度VWSから、ギヤ比Gr、車輪有効半径Rを用いて目標エンジン回転数を決めることができる。よって、ブレーキCU32で直接目標エンジン回転数を演算することで、エンジンCU36の演算負荷を軽減できる。
【0084】
また、実施例7では、駆動輪平均速度が目標スリップ率速度VWSとなるように目標エンジン回転数を設定するため、ホイルシリンダW/Cの増減圧頻度が下がり、HU31のバルブ動作音およびホイルシリンダW/Cの液圧変動を小さくでき、ブレーキシステムの作動音および振動の低減と、減速フィーリングの向上とを共に実現できる。
【0085】
(他の実施例)
以上、本発明を実施するための最良の形態を、各実施例に基づいて説明したが、本発明の具体的な構成は、各実施例に示した構成に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
【0086】
例えば、実施例1では、エンジンCU36において、車輪のうち少なくとも駆動輪である左右前輪FL,FRに対するHU31の作動時、ブレーキCU32の出力信号に応じてエンジンブレーキトルクを低減するようコントロールする例を示したが、エンジン回転数を増加するようコントロールしてもよい。
【0087】
実施例2では、ABS制御時のAT40のギヤ位置をニュートラルとする例を示したが、AT40内またはエンジン39と左右前輪FL,FRとの間に設けられたクラッチを切り離す構成としてもよい。また、AT40の変速段を高速段側にシフトする構成としてもよい。
トランスミッションは有段ATに限らず、CVT、自動MTを用いてもよい。
【0088】
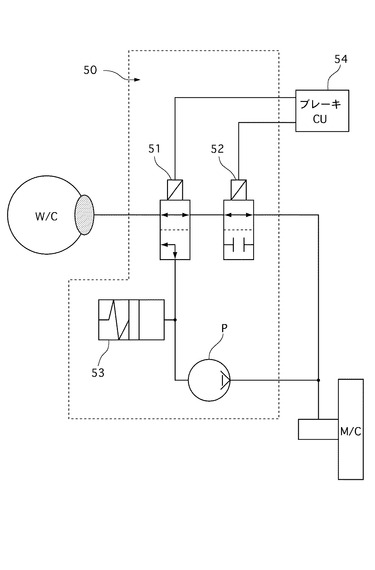
また、油圧ユニットは、ABS制御が可能であればよい。図15は、ABS制御用の油圧ユニットの一例である。HU50はポンプP、第1,第2切り替え弁51,52、リザーバ53を有する。第1,第2切り替え弁51,52はそれぞれブレーキCU54からの指令に基づき駆動され、常開の第1切り替え51はマスタシリンダM/Cと第2切り替え弁52との連通/遮断を切り替える。第2切り替え弁52はホイルシリンダW/CとポンプP、またはホイルシリンダW/Cと第1切り替え弁51との連通を切り替える。さらに、ポンプPと第2切り替え弁52の間にはリザーバ53が設けられ、減圧時にホイルシリンダW/C内の作動油を一時的に滞留させる。
上記構成の油圧ユニットを備えた車両用制駆動力制御装置においても、本発明を適用することで、各実施例と同様の作用効果を得ることができる。
また、各実施例においては、エンジンにかえ、駆動源として電動機を用いることも可能である。
【図面の簡単な説明】
【0089】
【図1】実施例1の車両用制駆動力制御装置をシステム構成図である。
【図2】実施例1の油圧ユニット31の油圧回路図である。
【図3】実施例1のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートである。
【図4】従来のABS制御作動時のタイムチャートである。
【図5】実施例1のABS制御作動時のタイムチャートである。
【図6】実施例2のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートである。
【図7】実施例2のABS制御作動時のタイムチャートである。
【図8】実施例3のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートである。
【図9】実施例3のABS制御作動時のタイムチャートである。
【図10】実施例4のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートである。
【図11】実施例5のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートである。
【図12】実施例6のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートである。
【図13】ABS制御中の車輪の状態を示す図である。
【図14】実施例7のブレーキCU32で実行されるエンジン回転数要求値作成処理の流れを示すフローチャートである。
【図15】油圧ユニットの一例である。
【符号の説明】
【0090】
FL 左前輪(車輪)
FR 右前輪(車輪)
31 油圧ユニット(ブレーキユニット)
32 ブレーキコントロールユニット(アンチスキッドブレーキコントロールユニット)
32a スリップ状態算出部
32b 路面μ算出部
32c 車輪加速度算出部
36 エンジンコントロールユニット
39 エンジン(駆動源)
40 自動変速機(トランスミッション)
【技術分野】
【0001】
本発明は、車両制動時のエンジンブレーキトルクをコントロールする車両用制駆動力制御装置に関する。
【背景技術】
【0002】
特許文献1には、ABS制御中にエンジンブレーキの影響による車輪速下ずりが発生した場合、エンジンをアイドルアップすることで減圧後の車輪速の早期回復を図る技術が開示されている。
【特許文献1】特開平1−249555号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、上記従来技術にあっては、単にアイドル回転をコントロールするだけでエンジンブレーキトルクを積極的にコントロールしていないため、ブレーキ制御に対するエンジンブレーキトルクの影響を効果的に抑制できない。
【0004】
本発明の目的は、ブレーキ制御に対する駆動源のブレーキトルクの影響を効果的に抑制できる車両用制駆動力制御装置を提供することにある。
【課題を解決するための手段】
【0005】
上記目的を達成するため、本発明の車両用制駆動力制御装置では、少なくとも車両の駆動源に対してブレーキユニットが制動力を与えているときは駆動源のブレーキトルクを低減させる。
【発明の効果】
【0006】
よって、本発明にあっては、ブレーキ制御に対する駆動源のブレーキトルクの影響を効果的に抑制できる。
【発明を実施するための最良の形態】
【0007】
以下、本発明の車両用制駆動力制御装置を実現するための最良の形態を、図面に示す実施例に基づいて説明する。
【実施例1】
【0008】
まず、構成を説明する。
図1は実施例1の車両用制駆動力制御装置をシステム構成図、図2は実施例1の油圧ユニット(ブレーキユニットであり、以下、HU)31の油圧回路図である。実施例1の車両は、駆動源としてエンジン39を備え、エンジン39により左右前輪FL,FRを駆動するFF方式の車両である。また、HU31は、P系統とS系統との2系統からなる、X配管と呼ばれる配管構造となっている。
【0009】
HU31は、ブレーキコントロールユニット(以下、ブレーキCU)32からの指令に基づいて左前輪FLのホイルシリンダW/C(FL)、右後輪RRのホイルシリンダW/C(RR)、右前輪FRのホイルシリンダW/C(FR)、左後輪RLのホイルシリンダW/C(RL)の各液圧の保持、増圧または減圧を行う。
【0010】
ブレーキCU32は、コンバインセンサ33と、操舵角センサ34および各車輪速センサ35FL,35FR,35RL,35RRからの各情報と、エンジンコントロールユニット(以下、エンジンCU)36と、自動変速機コントロールユニット(以下、ATCU)37からCAN通信線38を通して得られる情報とに基づいて、制動制御実施の判断を行う。制動制御中は、ホイルシリンダ液圧の保持、増減圧指令を生成する。
【0011】
ブレーキペダルBPは、ドライバが制動を行う場合に操作され、操作量に応じて制動力を発生する。ブレーキスイッチBSは、ドライバがブレーキペダルBPを一定以上踏み込むことでONになる。ブレーキCU32は、ブレーキスイッチBSがONのときドライバブレーキ操作有り、OFFのときブレーキ操作無しと判断する。
【0012】
各ホイルシリンダW/Cは、対応する各車輪の制動を行う。コンバインセンサ33は、加速度センサとヨーレートセンサとを1パッケージ化したもので、加速度センサは、車両前後方向の加速度を検出し、ヨーレートセンサは、車両に作用するヨーレートを検出する。ここで、加速度センサは、路面勾配に応じた前後方向加速度を検出できるため、実施例1では、これを利用して勾配検出も行う。
【0013】
操舵角センサ34は、図示しないハンドルの回転角を検出する。各車輪速センサ35FL,35FR,35RL,35RRは、各車輪の車輪速を検出する。アクセルペダルAPは、ドライバの操作により車両の加減速コントロールを行う。エンジンCU36は、ドライバのアクセルペダル操作からエンジン39のコントロールを行う。また、エンジン39の発生トルクと、アクセルペダル操作量の情報を通信(CAN)で出力する。ATCU37は、自動変速機(AT)40のコントロールを行う。また、ギヤ位置信号(AT40のレンジポジション)を通信(CAN)で出力する。
【0014】
HU31のP系統には、左前輪のホイルシリンダW/C(FL)、右後輪のホイルシリンダW/C(RR)が接続され、S系統には、右前輪のホイルシリンダW/C(FR)、左後輪のホイルシリンダW/C(RL)が接続されている。また、P系統、S系統それぞれに、ポンプPPとポンプPSとが設けられ、このポンプPPとポンプPSは、1つのモータMによって駆動される。なお、ポンプは、プランジャポンプやギヤポンプ等が適宜搭載される。コストの面からいえば、プランジャポンプが望ましく、滑らかさ(制御性)からいえば、ギヤポンプが望ましい。
【0015】
マスタシリンダM/CとポンプPP,PS(以下、ポンプPと記載する)の吸入側とは、管路11P,11S(以下、管路11と記載する)によって接続されている。この各管路11上には、常閉型の電磁弁であるゲートインバルブ2P,2Sが設けられている。
【0016】
また、管路11上であって、ゲートインバルブ2P,2S(以下、ゲートインバルブ2と記載する)とポンプPとの間にはチェックバルブ6P,6S(以下、チェックバルブ6と記載する)が設けられ、この各チェックバルブ6は、ゲートインバルブ2からポンプPへ向かう方向へのブレーキ液の流れを許容し、反対方向の流れを禁止する。
【0017】
各ポンプPの吐出側と各ホイルシリンダW/Cとは、管路12P,12S(以下、管路12と記載する)によって接続されている。この各管路12上には、各ホイルシリンダW/Cに対応する常開型の電磁弁であるソレノイドインバルブ4FL,4RR,4FR,4RL(以下、ソレノイドインバルブ4と記載する)が設けられている。
【0018】
また、各管路12上であって、各ソレノイドインバルブ4とポンプPとの間にはチェックバルブ7P,7S(以下、チェックバルブ7と記載する)が設けられて、この各チェックバルブ7は、ポンプPからソレノイドインバルブ4へ向かう方向へのブレーキ液の流れを許容し、反対方向の流れを禁止する。
【0019】
さらに、各管路12には、各ソレノイドインバルブ4を迂回する管路17FL,17RR,17FR,17RL(以下、管路17と記載する)が設けられ、この管路17には、チェックバルブ10FL,10RR,10FR,10RL(以下、チェックバルブ10と記載する)が設けられている。この各チェックバルブ10は、ホイルシリンダW/CからポンプPへ向かう方向へのブレーキ液の流れを許容し、反対方向の流れを禁止する。
【0020】
マスタシリンダM/Cと管路12とは管路13P,13S(以下、管路13と記載する)によって接続され、管路12と管路13とはポンプPとソレノイドインバルブ4との間において合流する。この各管路13上には、常開型の電磁弁であるゲートアウトバルブ3P,3S(以下、ゲートアウトバルブ3と記載する)が設けられている。
【0021】
また各管路13には、各ゲートアウトバルブ3を迂回する管路18P,18S(以下、管路18と記載する)が設けられ、この管路18には、チェックバルブ9P,9S(以下、チェックバルブ9と記載する)が設けられている。この各チェックバルブ9は、マスタシリンダM/C側からホイルシリンダW/Cへ向かう方向のブレーキ液の流れを許容し、反対方向の流れを禁止する。
【0022】
ポンプPの吸入側にはリザーバ16P,16S(以下、リザーバ16と記載する)が設けられ、このリザーバ16とポンプPとは管路15P,15S(以下、管路15と記載する)によって接続されている。リザーバ16とポンプPとの間にはチェックバルブ8P,8S(以下、チェックバルブ8と記載する)が設けられて、この各チェックバルブ8は、リザーバ16からポンプPへ向かう方向のブレーキ液の流れを許容し、反対方向の流れを禁止する。
【0023】
ホイルシリンダW/Cと管路15とは管路14P,14S(以下、管路14と記載する)によって接続され、管路14と管路15とはチェックバルブ8とリザーバ16との間において合流する。この各管路14には、それぞれ常閉型の電磁弁であるソレノイドアウトバルブ5FL,5RR,5FR,5RL(以下、ソレノイドアウトバルブ5と記載する)が設けられている。
【0024】
ブレーキCU32は、各センサの入力信号およびドライバのブレーキペダル操作状態等に基づいてドライバの操作に従う通常ブレーキ制御の演算と、アンチスキッドブレーキ制御(ABS)、車両挙動安定化制御(VDC)、車間距離制御および障害物回避制御等車両の情報を用いてタイヤのスリップや車両挙動を制御するための演算を行い、車両として必要な制動力(全ての輪)を算出し、各車輪に必要な制動力目標値を演算する。ブレーキCU32は、ABS制御を行うアンチスキッドブレーキコントロールユニットしての機能を有する。
【0025】
また、ブレーキCU32は、急な降坂路(例えば、斜度10%)で車速が目標車速(例えば、7km/h)を超えないように、自動制動(実施例1では、液圧ブレーキとエンジンブレーキとを用いる。)を作動させる、いわゆるヒルディセントコントロール(HDC)を実施する定速走行装置に適用される。HDCは、例えば、ドライバにより操作されるHDCスイッチ41のON、斜度≧10%、車速≦所定車速(例えば、10km/h)およびAT40の変速段が最ロー(1速)の各条件を全て満たした場合に作動する。
【0026】
ブレーキCU32は、スリップ状態算出部32aと、路面μ算出部32bと、車輪加速度算出部32cを備える。スリップ状態算出部32aは、スリップ状態として、駆動輪(前輪)平均速度を算出する。路面μ算出部32bは、路面μ(路面摩擦係数)を算出する。車輪加速度算出部32cは、駆動輪平均加速度を算出する。これら駆動輪平均速度、路面μおよび駆動輪平均加速度は、上記各制御の制動力目標値を決めるパラメータとして適宜用いられる。
【0027】
ブレーキCU32は、ABS制御に対するエンジン39のブレーキトルク、すなわちエンジンブレーキトルクの影響を抑制することを目的とし、ABS制御中はエンジンブレーキトルクを低減する目標エンジントルク(最適エンジンブレーキトルク)としてのエンジントルク要求値を作成し、作成したエンジントルク要求値を要求信号としてエンジンCU36へ出力する。
エンジンCU36は、ブレーキCU32からの要求信号に応じた目標エンジン回転数を演算し、演算した目標エンジン回転数となるようにエンジン回転数を調節することで、エンジントルクをコントロールする。
また、ブレーキCU32は、ABS制御中、路面μ算出部32bにより高μ→低μのμジャンプが発生した場合、車両を加速させるエンジントルク要求値をエンジンCU36へ出力する。
【0028】
[エンジントルク要求値作成処理]
図3は、実施例1のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、この処理は、所定周期で繰り返し実行される。
ステップS1では、ABS制御中であるか否かを判定する。YESの場合にはステップS2へ移行し、NOの場合にはステップS3へ移行する。
ステップS2では、エンジントルク要求値を「0Nm」とし、リターンへ移行する。
ステップS3では、エンジントルク要求値を「なし」とし、リターンへ移行する。
【0029】
次に、作用を説明する。
[エンジンブレーキトルク低減作用]
図4は、従来のABS制御作動時のタイムチャートである。従来は、加速、または一定速走行からエンジンブレーキにて減速するために、エンジンCUは、時点t1のアクセルOFF(アクセル開度ゼロ)で目標エンジントルク信号は減速側のトルクとなり、エンジンブレーキトルクが発生する。その後、時点t2でABS制御が作動した場合も、目標エンジントルク信号は一定であるため、エンジンブレーキトルクは不変である。
【0030】
なお、従来制御では、ABS制御中の疑似車体速VIの下ずり防止を図るために、目標エンジン回転を高める、いわゆるアイドルアップを行っている。ここで、「疑似車体速VIの下ずり」とは、車輪速度が実車体速よりも低くなることで、車輪速度に基づいて設定する疑似車体速が適正値よりも低く設定されることをいう。
【0031】
ところが、上記従来技術では、単にアイドル回転をコントロールするのみであるため、ABS制御に対するエンジンブレーキトルクの影響により、以下のような問題があった。
例えば、アイドル回転数が低いディーゼルエンジン車でのABSインギヤ制動時(インギヤ=ATのギヤが入っている状態)には、低速時に車輪スリップによりエンジン回転がアイドル回転以下となる場合がある。このとき、エンジンCU側で加速側のエンジントルクを発生させてアイドル回転を維持しようとしても、ABS制御サイクルに対してエンジントルクの立ち上がりが遅いため、車輪がロックしてエンジンストールに至る可能性がある。
【0032】
また、低μ路での制動時に過度のエンジンブレーキトルクが発生すると、ABS制御でブレーキ液の減圧を行ったとしても、車輪速が十分に復帰せず、過スリップが継続して車輪ロック時間が長くなる。この結果、タイヤ横力を十分に確保できず、走行安定性の維持が困難となる。
【0033】
さらに、図4の時点t3で高μ→低μのμジャンプが発生した場合、減速トルクが出力されたままであるため、時点t3で低μ路との判断によりエンジントルクを立ち上げたとしても、加速トルクの発生が間に合わず、車輪ロックの継続によりエンジンストールが発生するおそれがある。
【0034】
これに対し、実施例1では、ブレーキCU32において、ABS制御中であるか否かを判定し、ABS制御中であればエンジンCU36に対して目標エンジントルクを0Nmとするエンジントルク要求値を出力する(ステップS1→ステップS2)。一方、ABS制御中でなければ、エンジントルク要求値を出力しない(ステップS1→ステップS3)。
【0035】
すなわち、ブレーキCU32は、ABS制御の初期段階からエンジンCU36に対しエンジンブレーキトルクを小さくするエンジントルク要求値を出力し、エンジンブレーキトルクの影響を小さくしておくことで、十分なタイヤ横力を確保できない車輪ロック時間を短くでき、走行安定性を確保できる。
【0036】
図5は、実施例1のABS制御作動時のタイムチャートであり、図中の実線は実施例1の目標エンジントルク、点線は従来の目標エンジントルクである。図5に示すように、ABSの作動開始から目標エンジントルクを0Nmとしてエンジンブレーキトルクを無くし、ロック傾向を小さくできるため、ABS制御に対するエンジンブレーキトルクの影響を効果的に抑制でき、エンジンストールの発生を防止できる。
【0037】
また、時点t3で高μ→低μのμジャンプが発生したとき、エンジンCU36は、ブレーキCU32からの要求に応じて車両を加速させるエンジントルクを出力させるが、時点t3直前の目標エンジントルク信号はゼロであるため、図5の一点鎖線で示すように、エンジントルクを素早く立ち上げることができ、ABSの減圧遅れによる車輪ロックを小さくできる。このため、速やかに車輪速の復帰を行うことが可能となり、車輪ロックの継続によるエンジンストールを防止できる。
【0038】
以下に、実施例1の効果を示す。
(1) 駆動源(エンジン39)の出力により駆動する左右前輪FL,FRと、車両の状態に応じて車輪に作用する制動力を制御するHU31と、HU31をコントロールするブレーキCU32と、を備え、少なくともエンジン39に対してHU31が制動力を与えているときはエンジン39のブレーキトルク(エンジンブレーキトルク)を低減させる。これにより、ブレーキ制御に対するエンジンブレーキトルクの影響を効果的に抑制できる。
【0039】
(2) ブレーキCU32は、エンジントルク要求値を演算してエンジンCU36へ出力し、エンジンCU36は、エンジントルク要求値となるようにエンジン39をコントロールする。これにより、ブレーキ制御に適切なエンジントルクを得られるため、制動性能の向上を図ることができる。
また、ブレーキCU32は、既存のCAN通信線38を用いたCAN信号によりエンジンCU36とのデータ送受信を行っているため、新たに信号線を追加することなく上記効果を得られる。
【0040】
(3) エンジントルク要求値を0Nmとしたため、エンジントルクを0Nmとすることで制動性能の向上を図ることができる。
【0041】
(4) 路面μを算出する路面μ算出部32bを備え、エンジンCU36は、算出された路面μが高μから低μに変化したとき、車両を加速させるエンジントルクを出力するため、高μ路から低μ路へのμジャンプ時におけるエンジンストールを防止できる。
【0042】
(5) HU31は、車両の下り走行時に自動制動を行う定速走行装置に適用されるため、低速走行時のエンジンブレーキトルクをコントロールすることで、エンジンストールを抑制でき、下り坂での極低速走行が可能となる。
【0043】
(6) エンジン39の状態をコントロールするエンジンCU36と、車両の状態に応じて車輪に作用する制動力を制御するHU31と、HU31をコントロールするブレーキCU32と、を備え、エンジンCU36は、車輪のうち少なくとも駆動輪である左右前輪FL,FRに対するHU31の作動時、ブレーキCU32の出力信号に応じてエンジンブレーキトルクを低減するようコントロールする。これにより、ブレーキ制御に対するエンジンブレーキトルクの影響を効果的に抑制できる。
【0044】
(7) ブレーキCU32は、エンジントルク要求値を演算し、ブレーキCU32の出力信号は、エンジントルク要求値であって、エンジンCU36は、エンジントルク要求値となるようにエンジン39をコントロールする。これにより、ブレーキ制御に適切なエンジントルクを得られるため、制動性能の向上を図ることができる。
【実施例2】
【0045】
実施例2は、ABS制御中はAT40のギヤ位置をニュートラルとする例である。なお、全体構成については、図1,2に示した実施例1と同様であるため、図示ならびに説明を省略する。
【0046】
ブレーキCU32は、ABS制御中、AT40のギヤ位置をニュートラルとするAT制御要求信号をATCU37へ送信する。
ATCU37は、ブレーキCU32からのAT制御要求信号に応じてAT40のギヤ位置をニュートラルとする。
【0047】
[エンジントルク要求値作成処理]
図6は、実施例2のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、図3のフローチャートと同一の処理を行うステップには、同一のステップ番号を付して説明を省略する。
ステップS21では、AT制御要求を「ギヤ位置ニュートラル」とし、リターンへ移行する。
ステップS22では、AT制御要求を「なし」とし、リターンへ移行する。
【0048】
次に、作用を説明する。
[エンジンブレーキトルク低減作用]
図7は、実施例2のABS制御作動時のタイムチャートであり、実施例2では、ABS制御の作動開始と同時にAT40のギヤ位置をニュートラルとする(ステップS1→ステップS21)。このため、エンジンブレーキトルクが0Nm相当となり、実施例1と同様、ロック傾向を小さくできるため、ABS制御に対するエンジンブレーキトルクの影響を効果的に抑制でき、エンジンストールの発生を防止できる。
【0049】
以下に、実施例2の効果を示す。
(8) エンジンブレーキトルクの低減は、AT40のギヤ位置をニュートラルとすることにより実施されるため、ブレーキ制御に対するエンジンブレーキトルクの影響を効果的に抑制できる。
【実施例3】
【0050】
実施例3は、左右前輪FL,FRのスリップ状態に応じてエンジンブレーキトルクをコントロールする例である。なお、全体構成については、図1,2に示した実施例1と同様であるため、図示ならびに説明を省略する。
【0051】
[エンジントルク要求値作成処理]
図8は、実施例3のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、図3のフローチャートと同一の処理を行うステップには、同一のステップ番号を付して説明を省略する。
【0052】
ステップS31では、スリップ状態算出部32aにより算出された駆動輪平均速度(右前輪車輪速VwFRと左前輪車輪速VwFLとの平均値)が、目標スリップ率が得られる車輪速度である目標スリップ率速度VWSに所定値を(例えば、1km/h)を加算した値よりも大きいか否かを判定する。YESの場合にはステップS32へ移行し、NOの場合にはステップS33へ移行する。
【0053】
ステップS32では、エンジントルク要求値(第1のエンジンブレーキトルク)を下記の式(1)から算出し、リターンへ移行する。
エンジントルク要求値=K1×{(VwFR+VwFL)/2-VWS} …(1)
ここで、K1は係数である。
【0054】
ステップS33では、駆動輪平均速度が、目標スリップ率が得られる車輪速度である目標スリップ率速度VWSから所定値を(例えば、1km/h)を減算した値よりも小さいか否かを判定する。YESの場合にはステップS34へ移行し、NOの場合にはステップS3へ移行する。
ステップS34では、エンジントルク要求値(第2のエンジンブレーキトルク)を下記の式(2)から算出し、リターンへ移行する。
エンジントルク要求値=-K2×{VWS-(VwFR+VwFL)/2} …(2)
ここで、K2は係数である。
実施例3では、目標スリップ率速度VWS±1km/hの範囲に対応する目標スリップ率の範囲を、第1のスリップ率と称する。
【0055】
次に、作用を説明する。
[スリップ率に応じたエンジンブレーキトルク変更作用]
実施例3では、ABS制御時、駆動輪平均速度(VwFR+VwFL)/2を求め、この値とオフセット値を加算または減算した目標スリップ率速度VWSとを比較し、スリップが過小であると判定した場合は、エンジントルク要求値を目標スリップ率速度VWSと駆動輪平均速度との差に応じたエンジンブレーキトルクとする(ステップS1→ステップS31→ステップS33→ステップS34)。逆に、スリップが過多であると判定した場合は、エンジントルク要求値を駆動輪平均速度と目標スリップ率速度VWSとの差に応じた加速トルクとする(ステップS1→ステップS31→ステップS32)。
【0056】
図9は、実施例3のABS制御作動時のタイムチャートであり、実施例3では、エンジンCU36において、ブレーキCU32で作成されたエンジントルク要求値に基づいてエンジントルクを制御することにより、駆動輪平均速度が目標スリップ率速度VWSとなるように、すなわち駆動輪のスリップ率が第1のスリップ率(目標スリップ率の範囲内)となるように目標エンジントルクが設定され、エンジントルクが調整される。
【0057】
ここで、ABS制御では、駆動輪のスリップ率が適正範囲を超えたとき(目標スリップ率の上限を超えたとき)ホイルシリンダ液圧を減圧し、適正範囲を下回ったとき(目標スリップ率の下限を下回ったとき)ホイルシリンダ液圧を増圧する。そして、スリップ率が適正範囲内にある場合、ホイルシリンダ液圧は保持される。
【0058】
そこで、実施例3では、スリップ率が適正範囲内に収まるようにエンジントルクを調整することで、ホイルシリンダW/Cの増減圧頻度を下げることができる。つまり、実施例3では、駆動輪のスリップ状態をエンジントルクにより補助的に調整することにより、ブレーキCU32によるABS制御の負荷を低減できる。
【0059】
この結果、HU31のバルブ動作音およびホイルシリンダW/Cの液圧変動を小さくでき、ブレーキシステムの作動音および振動を低減できる。また、過スリップの抑制による制動距離の短縮化が可能となるため、ドライバの意図する制動力が得られ、減速フィーリングの向上を図ることができる。
【0060】
以下に、実施例3の効果を示す。
(9) 車輪のスリップ状態を算出するスリップ状態算出部32aを備え、エンジンCU36は、算出された車輪のスリップ状態に応じてエンジンブレーキトルクをコントロールし、スリップ率が第1のスリップ率以上のときはエンジントルク要求値を第1のエンジンブレーキトルクとし、スリップ率が第1のスリップ率よりも小さいときはエンジントルク要求値を第1のエンジンブレーキトルクよりも大きな第2のエンジンブレーキトルクとする。これにより、スリップ状態に応じてエンジントルク要求値を設定でき、制動距離の短縮化を図ることができる。
【0061】
(10) 第1のエンジンブレーキトルクは、加速側のエンジントルクであり、第2のエンジンブレーキトルクは、減速側のエンジントルクであるため、制動性能の向上を図ることができる。
【0062】
(11) エンジン39の出力をコントロールするエンジンCU36と、車輪のスリップ状態に応じてホイルシリンダ液圧を増減圧するアンチスキッドブレーキコントロールユニットとしてのブレーキCU32と、を備え、エンジンCU36は、少なくとも駆動輪に対してABSが作動しているときには車輪のスリップ状態に応じてエンジンブレーキトルクをコントロールする。これにより、ブレーキ制御に対するエンジンブレーキトルクの影響を効果的に抑制できる。
【実施例4】
【0063】
実施例4は、車輪加速度に応じてエンジンブレーキトルクをコントロールする例である。なお、全体構成については、図1,2に示した実施例1と同様であるため、図示ならびに説明を省略する。
【0064】
[エンジントルク要求値作成処理]
図10は、実施例4のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、図3のフローチャートと同一の処理を行うステップには、同一のステップ番号を付して説明を省略する。
【0065】
ステップS41では、エンジントルク要求値を「X Nm」とし、ステップS42へ移行する。ここで、Xは初期値であり、駆動輪のスリップ率が目標スリップ率付近または車輪減速度が目標減速度付近となる目標エンジントルクとする。
ステップS42では、車輪加速度算出部32cにより算出された駆動輪平均加速度(右前輪車輪加速度VwdFRと左前輪車輪加速度VwdFLとの平均値)が、1.0gよりも大きいか否かを判定する。YESの場合にはステップS44へ移行し、NOの場合にはステップS43へ移行する。
【0066】
ステップS43では、駆動輪平均加速度が-1.0gよりも小さいか否かを判定する。YESの場合にはステップS45へ移行し、NOの場合にはリターンへ移行する。
ステップS44では、エンジントルク要求値を「-X1 Nm」とし、リターンへ移行する。ここで、X1は、駆動輪のスリップ率が目標スリップ率付近または車輪減速度が目標減速度付近となるような目標エンジントルクとする。
ステップS45では、エンジントルク要求値を「X2 Nm」とし、リターンへ移行する。ここで、X2は、駆動輪のスリップ率が目標スリップ率付近または車輪減速度が目標減速度付近となる目標エンジントルクとする。
【0067】
次に、作用を説明する。
[減速度に応じたエンジンブレーキトルク変更作用]
実施例4では、駆動輪平均加速度に応じてエンジントルク要求値を変更する。駆動輪平均加速度が減速傾向のときは加速側のエンジントルクX2 Nmとし(ステップS1→ステップS41→ステップS42→ステップS43→ステップS45)、加速傾向のときは減速側のエンジントルク-X1 Nmとする(ステップS1→ステップS41→ステップS42→ステップS44)。すなわち、実施例4では、駆動輪のスリップ率が目標スリップ率付近となるように、または車輪減速度が目標減速度付近となるように目標エンジントルクが設定され、エンジントルクが調整される。
【0068】
以下に、実施例4の効果を示す。
(12) 車輪の加速度を算出する車輪加速度算出部32cを備え、エンジントルク要求値は、算出された車輪加速度が減速傾向のときは加速側のエンジントルクであり、加速傾向のときは減速側のエンジントルクである。これにより、駆動輪加速度の傾向に応じてエンジントルク要求値を設定でき、制動距離の短縮化を図ることができる。
【0069】
(13) エンジン39の出力をコントロールするエンジンCU36と、車輪のスリップ状態に応じてホイルシリンダ液圧を増減圧するアンチスキッドブレーキコントロールユニットとしてのブレーキCU32と、を備え、エンジンCU36は、少なくとも駆動輪に対してABSが作動しているときには車輪の加速度の状態に応じてエンジンブレーキトルクをコントロールする。これにより、ブレーキ制御に対するエンジンブレーキトルクの影響を効果的に抑制できる。
【実施例5】
【0070】
実施例5は、駆動輪の車輪速度と目標車輪速度との偏差、および駆動輪の車輪復帰加速度と目標車輪復帰加速度との偏差に基づいてエンジンブレーキトルクをPD制御する例である。なお、全体構成については、図1,2に示した実施例1と同様であるため、図示ならびに説明を省略する。
【0071】
[エンジントルク要求値作成処理]
図11は、実施例5のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、図3のフローチャートと同一の処理を行うステップには、同一のステップ番号を付して説明を省略する。
【0072】
ステップS51では、エンジントルク要求値を下記の式(3)に基づいて設定し、リターンへ移行する。
エンジントルク要求値=kp×(Vw-Vw*)+kd×(VwD30-VwD30*) …(3)
ここで、kpは比例ゲイン、kdは微分ゲイン、Vwは車輪速度、Vw*は目標車輪速度、VwD30は車輪復帰加速度(減圧により車輪速度Vwが車体速度に向けて復帰する加速度)、VwD30*は目標車輪復帰加速度である。
【0073】
以上のように、実施例5では、車輪速度Vwと目標車輪速度Vw*との偏差、および車輪復帰加速度VwD30と目標車輪復帰加速度VwD30*との偏差に応じてエンジントルク要求値を設定しているため、車輪速度Vwおよび車輪復帰加速度VwD30をABS制御の目標車輪速度Vw*および目標車輪復帰加速度VwD30*に近づけることができ、過スリップの抑制による制動距離の短縮化を図ることができる。
【実施例6】
【0074】
実施例6は、目標減速度に応じてエンジンブレーキトルクをコントロールする例である。なお、全体構成については、図1,2に示した実施例1と同様であるため、図示ならびに説明を省略する。
【0075】
[エンジントルク要求値作成処理]
図12は、実施例6のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、図3のフローチャートと同一の処理を行うステップには、同一のステップ番号を付して説明を省略する。
【0076】
ステップS61では、エンジントルク要求値を下記の式(4)に基づいて設定し、リターンへ移行する。
エンジントルク要求値=(k×VIK)/Gr …(4)
ここで、kは係数、VIKは車両減速度、Grはエンジン39−車輪間のギヤ比である。
【0077】
図13は、ABS制御中の車輪(駆動輪)の状態を示す図であり、車輪には、駆動トルク(エンジントルク×ギヤ比Gr)TE、ブレーキトルクTB、路面反力によるトルクμwR(μ:路面摩擦係数、w:輪荷重、R:車輪の有効半径)がそれぞれ作用する。よって、慣性モーメントI、車輪回転加速度ω'のとき、下記の式(5)が成立する。
Iω'=μwR+TE-TB …(5)
【0078】
ここで、路面μの大きさを目標減速度とおくと、ブレーキトルクBTと路面反力によるトルクμwRとが釣り合うようにエンジントルク要求値を設定することで、ABS作動頻度が少なくなり、ブレーキシステムの作動音および振動を低減できる。また、過スリップの抑制による制動距離の短縮化が可能となるため、ドライバの意図する制動力が得られ、減速フィーリングの向上を図ることができる。つまり、実施例6では、TB=μwRとし、μ=VIKとなるよう、式(4)に基づいてエンジントルク要求値を設定しているため、ブレーキシステムにおける作動音および振動の低減と、減速フィーリングの向上とを共に実現できる。
【実施例7】
【0079】
実施例7では、ブレーキCU32からエンジンCU36へ直接目標エンジン回転数を要求する例である。なお、全体構成については、図1,2に示した実施例1と同様であるため、図示ならびに説明を省略する。
【0080】
ブレーキCU32は、ABS制御中、目標スリップ率速度VWSに応じて目標エンジン回転数であるエンジン回転数要求値を作成し、作成したエンジン回転数要求値を要求信号としてエンジンCU36へ出力する。
エンジンCU36は、ブレーキCU32からの要求信号に応じてエンジン回転数をコントロールする。
【0081】
[エンジン回転数要求値作成処理]
図14は、実施例7のブレーキCU32で実行されるエンジン回転数要求値作成処理の流れを示すフローチャートで、以下、各ステップについて説明する。なお、図3のフローチャートと同一の処理を行うステップには、同一のステップ番号を付して説明を省略する。
【0082】
ステップS71では、エンジン回転数要求値を下記の式(6)に基づいて設定し、リターンへ移行する。
エンジン回転数要求値={(VWS/3600)/(2πR)}×Gr …(6)
【0083】
すなわち、実施例3のようにスリップ状態に応じてエンジントルクをコントロールする際、目標スリップ率速度VWSから、ギヤ比Gr、車輪有効半径Rを用いて目標エンジン回転数を決めることができる。よって、ブレーキCU32で直接目標エンジン回転数を演算することで、エンジンCU36の演算負荷を軽減できる。
【0084】
また、実施例7では、駆動輪平均速度が目標スリップ率速度VWSとなるように目標エンジン回転数を設定するため、ホイルシリンダW/Cの増減圧頻度が下がり、HU31のバルブ動作音およびホイルシリンダW/Cの液圧変動を小さくでき、ブレーキシステムの作動音および振動の低減と、減速フィーリングの向上とを共に実現できる。
【0085】
(他の実施例)
以上、本発明を実施するための最良の形態を、各実施例に基づいて説明したが、本発明の具体的な構成は、各実施例に示した構成に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
【0086】
例えば、実施例1では、エンジンCU36において、車輪のうち少なくとも駆動輪である左右前輪FL,FRに対するHU31の作動時、ブレーキCU32の出力信号に応じてエンジンブレーキトルクを低減するようコントロールする例を示したが、エンジン回転数を増加するようコントロールしてもよい。
【0087】
実施例2では、ABS制御時のAT40のギヤ位置をニュートラルとする例を示したが、AT40内またはエンジン39と左右前輪FL,FRとの間に設けられたクラッチを切り離す構成としてもよい。また、AT40の変速段を高速段側にシフトする構成としてもよい。
トランスミッションは有段ATに限らず、CVT、自動MTを用いてもよい。
【0088】
また、油圧ユニットは、ABS制御が可能であればよい。図15は、ABS制御用の油圧ユニットの一例である。HU50はポンプP、第1,第2切り替え弁51,52、リザーバ53を有する。第1,第2切り替え弁51,52はそれぞれブレーキCU54からの指令に基づき駆動され、常開の第1切り替え51はマスタシリンダM/Cと第2切り替え弁52との連通/遮断を切り替える。第2切り替え弁52はホイルシリンダW/CとポンプP、またはホイルシリンダW/Cと第1切り替え弁51との連通を切り替える。さらに、ポンプPと第2切り替え弁52の間にはリザーバ53が設けられ、減圧時にホイルシリンダW/C内の作動油を一時的に滞留させる。
上記構成の油圧ユニットを備えた車両用制駆動力制御装置においても、本発明を適用することで、各実施例と同様の作用効果を得ることができる。
また、各実施例においては、エンジンにかえ、駆動源として電動機を用いることも可能である。
【図面の簡単な説明】
【0089】
【図1】実施例1の車両用制駆動力制御装置をシステム構成図である。
【図2】実施例1の油圧ユニット31の油圧回路図である。
【図3】実施例1のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートである。
【図4】従来のABS制御作動時のタイムチャートである。
【図5】実施例1のABS制御作動時のタイムチャートである。
【図6】実施例2のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートである。
【図7】実施例2のABS制御作動時のタイムチャートである。
【図8】実施例3のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートである。
【図9】実施例3のABS制御作動時のタイムチャートである。
【図10】実施例4のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートである。
【図11】実施例5のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートである。
【図12】実施例6のブレーキCU32で実行されるエンジントルク要求値作成処理の流れを示すフローチャートである。
【図13】ABS制御中の車輪の状態を示す図である。
【図14】実施例7のブレーキCU32で実行されるエンジン回転数要求値作成処理の流れを示すフローチャートである。
【図15】油圧ユニットの一例である。
【符号の説明】
【0090】
FL 左前輪(車輪)
FR 右前輪(車輪)
31 油圧ユニット(ブレーキユニット)
32 ブレーキコントロールユニット(アンチスキッドブレーキコントロールユニット)
32a スリップ状態算出部
32b 路面μ算出部
32c 車輪加速度算出部
36 エンジンコントロールユニット
39 エンジン(駆動源)
40 自動変速機(トランスミッション)
【特許請求の範囲】
【請求項1】
駆動源の出力により駆動する車輪と、
車両の状態に応じて車輪に作用する制動力を制御するブレーキユニットと、
前記ブレーキユニットをコントロールするブレーキコントロールユニットと、
を備え、
少なくとも前記車両の駆動源に対して前記ブレーキユニットが制動力を与えているときは前記駆動源のブレーキトルクを低減させることを特徴とする車両用制駆動力制御装置。
【請求項2】
請求項1に記載の車両用制駆動力制御装置において、
前記駆動源はエンジンであり、
該エンジンの出力をコントロールするエンジンコントロールユニットを備え、
前記ブレーキコントロールユニットは、最適エンジンブレーキトルクを演算して前記エンジンコントロールユニットへ出力し、
前記エンジンコントロールユニットは、前記最適エンジンブレーキトルクとなるように前記エンジンをコントロールすることを特徴とする車両用制駆動力制御装置。
【請求項3】
請求項2に記載の車両用制駆動力制御装置において、
前記最適エンジンブレーキトルクを略ゼロとしたことを特徴とする車両用制駆動力制御装置。
【請求項4】
請求項2に記載の車両用制駆動力制御装置において、
路面μを算出する路面μ算出部を備え、
前記エンジンコントロールユニットは、算出された路面μが高μから低μに変化したとき、車両を加速させるエンジントルクを出力させることを特徴とする車両用制駆動力制御装置。
【請求項5】
請求項2に記載の車両用制駆動力制御装置において、
車輪のスリップ状態を算出するスリップ状態算出部を備え、
前記エンジンコントロールユニットは、算出された車輪のスリップ状態に応じてエンジンブレーキトルクをコントロールし、前記スリップ率が第1のスリップ率よりも大きいときは前記最適エンジンブレーキトルクを第1のエンジンブレーキトルクとし、前記スリップ率が前記第1のスリップ率よりも小さいときは前記最適エンジンブレーキトルクを第1のエンジンブレーキトルクよりも大きな第2のエンジンブレーキトルクとすることを特徴とする車両用制駆動力制御装置。
【請求項6】
請求項5に記載の車両用制駆動力制御装置において、
前記第1のエンジンブレーキトルクは、加速側のエンジントルクであり、前記第2のエンジンブレーキトルクは、減速側のエンジントルクであることを特徴とする車両用制駆動力制御装置。
【請求項7】
請求項2に記載の車両用制駆動力制御装置において、
車輪の加速度を算出する車輪加速度算出部を備え、
前記最適エンジンブレーキトルクは、算出された車輪加速度が減速傾向のときは加速側のエンジントルクであり、加速傾向のときは減速側のエンジントルクであることを特徴とする車両用制駆動力制御装置。
【請求項8】
請求項1に記載の車両用制駆動力制御装置において、
エンジンブレーキトルクの低減は、トランスミッションをニュートラルまたはギヤ比の変更、クラッチを断制御の少なくとも1つにより実施されることを特徴とする車両用制駆動力制御装置。
【請求項9】
請求項1に記載の車両用制駆動力制御装置において、
前記ブレーキユニットは、車両の下り走行時に自動制動を行う定速走行装置に適用されることを特徴とする車両用制駆動力制御装置。
【請求項10】
エンジンの状態をコントロールするエンジンコントロールユニットと、
車両の状態に応じて車輪に作用する制動力を制御するブレーキユニットと、
前記ブレーキユニットをコントロールするブレーキコントロールユニットと、
を備え、
前記エンジンコントロールユニットは、前記車輪のうち少なくとも駆動輪に対するブレーキユニットの作動時、前記ブレーキコントロールユニットの出力信号に応じてエンジンブレーキトルクを低減またはエンジン回転数を増加するようコントロールすることを特徴とする車両用制駆動力制御装置。
【請求項11】
請求項10に記載の車両用制駆動力制御装置において、
前記ブレーキコントロールユニットは、最適エンジンブレーキトルクを演算し、前記ブレーキコントロールユニットの出力信号は、前記最適エンジンブレーキトルクであって、
前記エンジンコントロールユニットは、前記最適エンジンブレーキトルクとなるようにエンジンをコントロールすることを特徴とする車両用制駆動力制御装置。
【請求項12】
請求項11において、
前記ブレーキコントロールユニットは、アンチスキッドブレーキコントロールユニットであって、路面μを算出する路面μ算出部を備え、
前記エンジンコントロールユニットは、算出された路面μが高μから低μに変化したとき、車両を加速させるエンジントルクを出力させることを特徴とする車両用制駆動力制御装置。
【請求項13】
請求項12に記載の車両用制駆動力制御装置において、
車輪のスリップ状態を算出するスリップ状態算出部を備え、
前記エンジンコントロールユニットは、前記車輪のスリップ状態に応じてエンジンブレーキトルクをコントロールし、スリップ率が第1のスリップ率よりも大きいときは前記最適エンジンブレーキトルクを第1のエンジンブレーキトルクとし、前記第1のスリップ率よりも小さいときは前記最適エンジンブレーキトルクを第1のエンジンブレーキトルクよりも大きな第2のエンジンブレーキトルクとすることを特徴とする車両用制駆動力制御装置。
【請求項14】
請求項13に記載の車両用制駆動力制御装置において、
前記第1のエンジンブレーキトルクは加速側のエンジントルクであり、前記第2のエンジンブレーキトルクは減速側のエンジントルクであることを特徴とする車両用制駆動力制御装置。
【請求項15】
請求項13に記載の車両用制駆動力制御装置において、
車輪の加速度を算出する車輪加速度算出部を備え、
前記最適エンジンブレーキトルクは、算出された車輪加速度が減速傾向のときは加速側のエンジントルクであり、加速傾向のときは減速側のエンジントルクであることを特徴とする車両用制駆動力制御装置。
【請求項16】
請求項11に記載の車両用制駆動力制御装置において、
前記最適エンジンブレーキトルクは、略ゼロであることを特徴とする車両用制駆動力制御装置。
【請求項17】
請求項11に記載の車両用制駆動力制御装置において、
前記ブレーキユニットは、車両の下り走行時に自動制御を行う定速走行装置に適用されることを特徴とする車両用制駆動力制御装置。
【請求項18】
エンジンの出力をコントロールするエンジンコントロールユニットと、
車輪のスリップ状態に応じてホイルシリンダ液圧を増減圧するアンチスキッドブレーキコントロールユニットと、
を備え、
前記エンジンコントロールユニットは、少なくとも駆動輪に対してアンチスキッドブレーキブレーキが作動しているときには前記車輪のスリップ状態または車輪の加減速の状態に応じて前記エンジンブレーキトルクをコントロールすることを特徴とする車両用制駆動力制御装置。
【請求項19】
請求項18に記載の車両用制駆動力制御装置において、
前記エンジンコントロールユニットは、
スリップ率が第1のスリップ率よりも大きいときは前記最適エンジンブレーキトルクを第1のエンジンブレーキトルクとし、前記第1のスリップ率よりも小さいときは前記最適エンジンブレーキトルクを第1のエンジンブレーキトルクよりも大きな第2のエンジンブレーキトルクとする、
または、
スリップ率が第1のスリップ率よりも大きいときは前記最適エンジンブレーキトルクを加速側のエンジントルクとし、前記第1のスリップ率よりも小さいときは前記最適エンジンブレーキトルクを減速側のエンジントルクとすることを特徴とする車両用制駆動力制御装置。
【請求項20】
請求項18に記載の車両用制駆動力制御装置において、
前記最適エンジンブレーキトルクは、算出された車輪加速度が減速傾向のときは加速側のエンジントルクであり、加速傾向のときは減速側のエンジントルクであることを特徴とする車両用制駆動力制御装置。
【請求項1】
駆動源の出力により駆動する車輪と、
車両の状態に応じて車輪に作用する制動力を制御するブレーキユニットと、
前記ブレーキユニットをコントロールするブレーキコントロールユニットと、
を備え、
少なくとも前記車両の駆動源に対して前記ブレーキユニットが制動力を与えているときは前記駆動源のブレーキトルクを低減させることを特徴とする車両用制駆動力制御装置。
【請求項2】
請求項1に記載の車両用制駆動力制御装置において、
前記駆動源はエンジンであり、
該エンジンの出力をコントロールするエンジンコントロールユニットを備え、
前記ブレーキコントロールユニットは、最適エンジンブレーキトルクを演算して前記エンジンコントロールユニットへ出力し、
前記エンジンコントロールユニットは、前記最適エンジンブレーキトルクとなるように前記エンジンをコントロールすることを特徴とする車両用制駆動力制御装置。
【請求項3】
請求項2に記載の車両用制駆動力制御装置において、
前記最適エンジンブレーキトルクを略ゼロとしたことを特徴とする車両用制駆動力制御装置。
【請求項4】
請求項2に記載の車両用制駆動力制御装置において、
路面μを算出する路面μ算出部を備え、
前記エンジンコントロールユニットは、算出された路面μが高μから低μに変化したとき、車両を加速させるエンジントルクを出力させることを特徴とする車両用制駆動力制御装置。
【請求項5】
請求項2に記載の車両用制駆動力制御装置において、
車輪のスリップ状態を算出するスリップ状態算出部を備え、
前記エンジンコントロールユニットは、算出された車輪のスリップ状態に応じてエンジンブレーキトルクをコントロールし、前記スリップ率が第1のスリップ率よりも大きいときは前記最適エンジンブレーキトルクを第1のエンジンブレーキトルクとし、前記スリップ率が前記第1のスリップ率よりも小さいときは前記最適エンジンブレーキトルクを第1のエンジンブレーキトルクよりも大きな第2のエンジンブレーキトルクとすることを特徴とする車両用制駆動力制御装置。
【請求項6】
請求項5に記載の車両用制駆動力制御装置において、
前記第1のエンジンブレーキトルクは、加速側のエンジントルクであり、前記第2のエンジンブレーキトルクは、減速側のエンジントルクであることを特徴とする車両用制駆動力制御装置。
【請求項7】
請求項2に記載の車両用制駆動力制御装置において、
車輪の加速度を算出する車輪加速度算出部を備え、
前記最適エンジンブレーキトルクは、算出された車輪加速度が減速傾向のときは加速側のエンジントルクであり、加速傾向のときは減速側のエンジントルクであることを特徴とする車両用制駆動力制御装置。
【請求項8】
請求項1に記載の車両用制駆動力制御装置において、
エンジンブレーキトルクの低減は、トランスミッションをニュートラルまたはギヤ比の変更、クラッチを断制御の少なくとも1つにより実施されることを特徴とする車両用制駆動力制御装置。
【請求項9】
請求項1に記載の車両用制駆動力制御装置において、
前記ブレーキユニットは、車両の下り走行時に自動制動を行う定速走行装置に適用されることを特徴とする車両用制駆動力制御装置。
【請求項10】
エンジンの状態をコントロールするエンジンコントロールユニットと、
車両の状態に応じて車輪に作用する制動力を制御するブレーキユニットと、
前記ブレーキユニットをコントロールするブレーキコントロールユニットと、
を備え、
前記エンジンコントロールユニットは、前記車輪のうち少なくとも駆動輪に対するブレーキユニットの作動時、前記ブレーキコントロールユニットの出力信号に応じてエンジンブレーキトルクを低減またはエンジン回転数を増加するようコントロールすることを特徴とする車両用制駆動力制御装置。
【請求項11】
請求項10に記載の車両用制駆動力制御装置において、
前記ブレーキコントロールユニットは、最適エンジンブレーキトルクを演算し、前記ブレーキコントロールユニットの出力信号は、前記最適エンジンブレーキトルクであって、
前記エンジンコントロールユニットは、前記最適エンジンブレーキトルクとなるようにエンジンをコントロールすることを特徴とする車両用制駆動力制御装置。
【請求項12】
請求項11において、
前記ブレーキコントロールユニットは、アンチスキッドブレーキコントロールユニットであって、路面μを算出する路面μ算出部を備え、
前記エンジンコントロールユニットは、算出された路面μが高μから低μに変化したとき、車両を加速させるエンジントルクを出力させることを特徴とする車両用制駆動力制御装置。
【請求項13】
請求項12に記載の車両用制駆動力制御装置において、
車輪のスリップ状態を算出するスリップ状態算出部を備え、
前記エンジンコントロールユニットは、前記車輪のスリップ状態に応じてエンジンブレーキトルクをコントロールし、スリップ率が第1のスリップ率よりも大きいときは前記最適エンジンブレーキトルクを第1のエンジンブレーキトルクとし、前記第1のスリップ率よりも小さいときは前記最適エンジンブレーキトルクを第1のエンジンブレーキトルクよりも大きな第2のエンジンブレーキトルクとすることを特徴とする車両用制駆動力制御装置。
【請求項14】
請求項13に記載の車両用制駆動力制御装置において、
前記第1のエンジンブレーキトルクは加速側のエンジントルクであり、前記第2のエンジンブレーキトルクは減速側のエンジントルクであることを特徴とする車両用制駆動力制御装置。
【請求項15】
請求項13に記載の車両用制駆動力制御装置において、
車輪の加速度を算出する車輪加速度算出部を備え、
前記最適エンジンブレーキトルクは、算出された車輪加速度が減速傾向のときは加速側のエンジントルクであり、加速傾向のときは減速側のエンジントルクであることを特徴とする車両用制駆動力制御装置。
【請求項16】
請求項11に記載の車両用制駆動力制御装置において、
前記最適エンジンブレーキトルクは、略ゼロであることを特徴とする車両用制駆動力制御装置。
【請求項17】
請求項11に記載の車両用制駆動力制御装置において、
前記ブレーキユニットは、車両の下り走行時に自動制御を行う定速走行装置に適用されることを特徴とする車両用制駆動力制御装置。
【請求項18】
エンジンの出力をコントロールするエンジンコントロールユニットと、
車輪のスリップ状態に応じてホイルシリンダ液圧を増減圧するアンチスキッドブレーキコントロールユニットと、
を備え、
前記エンジンコントロールユニットは、少なくとも駆動輪に対してアンチスキッドブレーキブレーキが作動しているときには前記車輪のスリップ状態または車輪の加減速の状態に応じて前記エンジンブレーキトルクをコントロールすることを特徴とする車両用制駆動力制御装置。
【請求項19】
請求項18に記載の車両用制駆動力制御装置において、
前記エンジンコントロールユニットは、
スリップ率が第1のスリップ率よりも大きいときは前記最適エンジンブレーキトルクを第1のエンジンブレーキトルクとし、前記第1のスリップ率よりも小さいときは前記最適エンジンブレーキトルクを第1のエンジンブレーキトルクよりも大きな第2のエンジンブレーキトルクとする、
または、
スリップ率が第1のスリップ率よりも大きいときは前記最適エンジンブレーキトルクを加速側のエンジントルクとし、前記第1のスリップ率よりも小さいときは前記最適エンジンブレーキトルクを減速側のエンジントルクとすることを特徴とする車両用制駆動力制御装置。
【請求項20】
請求項18に記載の車両用制駆動力制御装置において、
前記最適エンジンブレーキトルクは、算出された車輪加速度が減速傾向のときは加速側のエンジントルクであり、加速傾向のときは減速側のエンジントルクであることを特徴とする車両用制駆動力制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2010−18147(P2010−18147A)
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願番号】特願2008−180006(P2008−180006)
【出願日】平成20年7月10日(2008.7.10)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
【公開日】平成22年1月28日(2010.1.28)
【国際特許分類】
【出願日】平成20年7月10日(2008.7.10)
【出願人】(509186579)日立オートモティブシステムズ株式会社 (2,205)
【Fターム(参考)】
[ Back to top ]