
車両用動力伝達装置の制御装置
【課題】変速制限制御によって制限された自動変速機のギヤ段へのアップシフトに際してユーザに与える違和感を可及的に抑制する。
【解決手段】変速制限制御により自動変速機18のダウンシフトを実行した場合、前後GFRが上昇から下降に転じたときに、そのダウンシフトされたギヤ段からの自動変速機18のアップシフトが許可されるので、ユーザが求める加速感がピークを打って下がり始めているときにアップシフトによる加速感の減少を感じることになり、前記変速制限制御によって制限された自動変速機18の高車速側のギヤ段へのアップシフトに際してユーザに与える違和感を可及的に抑制することができる。つまり、自動変速機18の基本変速制御の実行を制限する変速制限制御の終了を適切に判断することができ、その変速制限制御の終了に伴って自動変速機18のアップシフトが実行された際にユーザに与える違和感を可及的に抑制することができる。
【解決手段】変速制限制御により自動変速機18のダウンシフトを実行した場合、前後GFRが上昇から下降に転じたときに、そのダウンシフトされたギヤ段からの自動変速機18のアップシフトが許可されるので、ユーザが求める加速感がピークを打って下がり始めているときにアップシフトによる加速感の減少を感じることになり、前記変速制限制御によって制限された自動変速機18の高車速側のギヤ段へのアップシフトに際してユーザに与える違和感を可及的に抑制することができる。つまり、自動変速機18の基本変速制御の実行を制限する変速制限制御の終了を適切に判断することができ、その変速制限制御の終了に伴って自動変速機18のアップシフトが実行された際にユーザに与える違和感を可及的に抑制することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、通常の関係に従って自動変速機の変速制御を実行する一方で、その通常の関係とは異なる方法で自動変速機のギヤ段或いはギヤ比を選択することができる車両用動力伝達装置の制御装置に関するものである。
【背景技術】
【0002】
駆動力源からの動力を駆動輪側へ伝達する自動変速機を備えた車両が良く知られている。例えば、特許文献1,2に記載された車両がそれである。一般に、このような自動変速機は、予め記憶された関係(変速マップ)から車速やアクセル開度等の車両状態に基づいてギヤ段(変速段)或いはギヤ比(変速比)が判断され、その判断されたギヤ段(ギヤ比も同意)となるように基本変速制御が実行される。一方、高車速側が制限された所定の上限ギヤ段を選択することにより、上記変速マップから判断されるギヤ段へのアップシフトを禁止したり或いはそのギヤ段からダウンシフトする制御、すなわち変速マップに従ったギヤ段選択に制約を加えて上記基本変速制御の実行を制限する変速制限制御が実行される場合もある。例えば、特許文献1には、次変速段余裕駆動力ポテンシャルと現変速段余裕駆動力ポテンシャルとの差が余裕駆動力差しきい値以上のときは、変速マップから選択された変速段へのアップシフトを許可し、余裕駆動力差しきい値未満のときは、そのアップシフトを禁止することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−208194号公報
【特許文献2】特開2005−9510号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上述したような変速制限制御は、所定の条件が成立したときに一時的に実行するものであり、いずれその変速制限制御を終了(解除)して、変速マップに従って変速を実行する基本変速制御に復帰させる必要がある。例えば、ドライバの所定操作が為されてから所定時間が経過したとき、又は車両加速度が所定加速度を跨いだときなどに、変速制限制御の終了(基本変速制御への復帰)を判断することが考えられる。しかしながら、このような判断は、実際値と所定値との大小関係で決定される為、種々の走行状態に応じた適切な所定値を設定する必要があり、車速や走行路の状態(コーナの旋回半径、登降坂路の勾配)やアクセルペダル操作等の多くのパラメータが存在することを考慮すると、適切な所定値を設定し難い可能性がある。加えて、所定値の設定時に考慮されていないシチュエーションや車両状態が発生する可能性がある。そうすると、基本変速制御への復帰時にアップシフトが実行された場合、基本変速制御のみが実行されているときのアップシフトとは異なる条件下でのアップシフト指令となるので、復帰を判断したタイミングによってはそのときのアップシフトがドライバに違和感を与える可能性がある。尚、このような課題は未公知であり、変速制限制御によって制限されたギヤ段或いはギヤ比へユーザに違和感を与えることなくアップシフトすることについて未だ提案されていない。
【0005】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、変速制限制御によって制限された自動変速機のギヤ段或いはギヤ比へのアップシフトに際してユーザに与える違和感を可及的に抑制することができる車両用動力伝達装置の制御装置を提供することにある。
【課題を解決するための手段】
【0006】
前記目的を達成する為の第1の発明の要旨とするところは、(a) 駆動力源からの動力を駆動輪側へ伝達する自動変速機を備え、その自動変速機を予め記憶された関係から車両状態に基づいて判断したギヤ段或いはギヤ比とする基本変速制御を実行する一方で、所定の条件が成立した場合には高車速側が制限された所定の上限ギヤ段或いはギヤ比を選択することによりその基本変速制御の実行を制限する変速制限制御を一時的に実行する車両用動力伝達装置の制御装置であって、(b) 前記変速制限制御により前記自動変速機のダウンシフトを実行した場合、車両前後加速度或いは駆動力が上昇から下降に転じたときに、そのダウンシフトされたギヤ段或いはギヤ比からのその自動変速機のアップシフトを許可することにある。
【発明の効果】
【0007】
このようにすれば、前記変速制限制御により前記自動変速機のダウンシフトを実行した場合、車両前後加速度或いは駆動力が上昇から下降に転じたときに、そのダウンシフトされたギヤ段或いはギヤ比からのその自動変速機のアップシフトが許可されるので、ユーザが求める加速感がピークを打って下がり始めているときにアップシフトによる加速感の減少を感じることになり、変速制限制御によって制限された自動変速機のギヤ段或いはギヤ比へのアップシフトに際してユーザに与える違和感を可及的に抑制することができる。つまり、自動変速機の基本変速制御の実行を制限する変速制限制御の終了を適切に判断することができ、その変速制限制御の終了に伴って自動変速機のアップシフトが実行された際にユーザに与える違和感を可及的に抑制することができる。
【0008】
ここで、第2の発明は、前記第1の発明に記載の車両用動力伝達装置の制御装置において、前記変速制限制御を解除することで、前記基本変速制御による前記自動変速機のアップシフトを許可することにある。このようにすれば、自動変速機の基本変速制御への復帰が適切に判断され、その基本変速制御への復帰に伴って自動変速機のアップシフトが実行された際にユーザに与える違和感を可及的に抑制することができる。
【0009】
また、第3の発明は、前記第1の発明又は第2の発明に記載の車両用動力伝達装置の制御装置において、所定の周期毎に取得された前記車両前後加速度或いは駆動力のn番目のサンプリングデータが、そのn番目のサンプリングデータの1つ前のサンプリングデータを含む連続したm個前までのそのm個のサンプリングデータの内の最小値となるサンプリングデータよりも小さいときに、その車両前後加速度或いは駆動力が上昇から下降に転じたと判定することにある。このようにすれば、車両前後加速度或いは駆動力が上昇から下降に転じたことが適切に判定される。例えば、車両前後加速度或いは駆動力の変化の傾きが正値から負値へと変化したことで判定する場合と比較して、ノイズ等により誤判定してしまうことが抑制される。
【0010】
また、第4の発明は、前記第1の発明乃至第3の発明の何れか1つに記載の車両用動力伝達装置の制御装置において、前記車両前後加速度或いは駆動力が正値であるときに、その車両前後加速度或いは駆動力が上昇から下降に転じたことを判定することにある。このようにすれば、減速中に車両前後加速度或いは駆動力のピークが発生したことで変速制限制御が解除されてしまうことが回避される。つまり、例えば減速から再加速に備えて変速制限制御を実行する場合、加速中に車両前後加速度或いは駆動力がピークを打つことで初めて変速制限制御を実行する意義が終了することに対して、加速時に車両前後加速度或いは駆動力のピークが発生したときに変速制限制御が適切に解除される。
【図面の簡単な説明】
【0011】
【図1】本発明が適用される車両に備えられた動力伝達経路の概略構成を説明する図であると共に、車両に設けられた制御系統の要部を説明する図である。
【図2】自動変速機などの構成を説明する骨子図である。
【図3】自動変速機の変速作動とそれに用いられる係合装置の作動の組み合わせとの関係を説明する作動図表である。
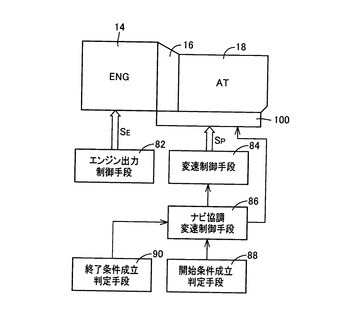
【図4】電子制御装置の制御機能の要部を説明する機能ブロック線図である。
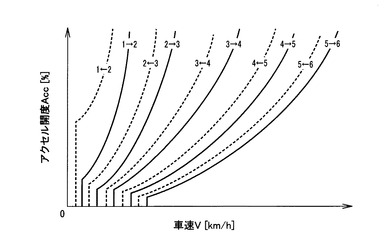
【図5】自動変速機の基本変速制御においてギヤ段の決定に用いられる変速線図の一例を示す図である。
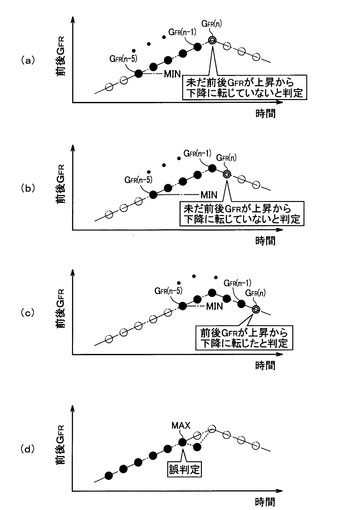
【図6】前後が上昇から下降に転じたか否かを、n番目のサンプリングデータと5サイクルタイム前までの連続した5個のサンプリングデータとを用いて判定する場合を例示する図である。
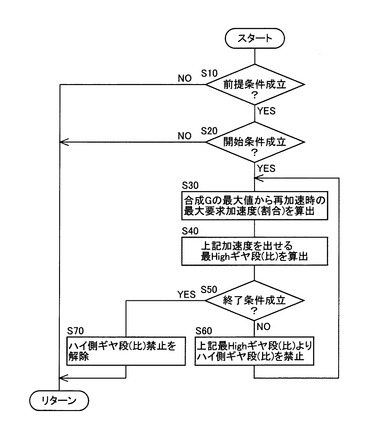
【図7】電子制御装置の制御作動の要部すなわち変速制限制御によって制限された自動変速機のギヤ段へのアップシフトに際してユーザに与える違和感を可及的に抑制する為の制御作動を説明するフローチャートである。
【図8】図7の制御作動に対応するタイムチャートである。
【発明を実施するための形態】
【0012】
本発明において、好適には、前記駆動力源としては、例えば燃料の燃焼によって動力を発生する内燃機関等のガソリンエンジンやディーゼルエンジン等が好適に用いられるが、電動機等の他の原動機を単独で、或いはエンジンと組み合わせて採用することもできる。
【0013】
また、好適には、前記自動変速機は、例えば複数組の遊星歯車装置の回転要素が係合装置によって選択的に連結されることにより複数のギヤ段(変速段)が択一的に達成される公知の遊星歯車式自動変速機、常時噛み合う複数対の変速ギヤを2軸間に備えてそれら複数対の変速ギヤのいずれかを同期装置によって択一的に動力伝達状態とする同期噛合型平行2軸式変速機ではあるが油圧アクチュエータにより駆動される同期装置によってギヤ段が自動的に切換られることが可能な同期噛合型平行2軸式自動変速機、同期噛合型平行2軸式自動変速機であるが入力軸を2系統備えて各系統の入力軸にクラッチがそれぞれ繋がり更にそれぞれ偶数段と奇数段へと繋がっている型式の変速機である所謂DCT(Dual Clutch Transmission)、動力伝達部材として機能する伝動ベルトが有効径が可変である一対の可変プーリに巻き掛けられギヤ比(変速比)が無段階に連続的に変化させられる所謂ベルト式無段変速機、共通の軸心まわりに回転させられる一対のコーンとその軸心と交差する回転中心回転可能な複数個のローラがそれら一対のコーンの間で挟圧されそのローラの回転中心と軸心との交差角が変化させられることによって変速比が可変とされた所謂トラクション型無段変速機などにより構成される。また、前記自動変速機の車両に対する搭載姿勢は、その自動変速機の軸線が車両の幅方向となるFF(フロントエンジン・フロントドライブ)車両などの横置き型でも、その自動変速機の軸線が車両の前後方向となるFR(フロントエンジン・リヤドライブ)車両などの縦置き型でも良い。
【0014】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
【実施例】
【0015】
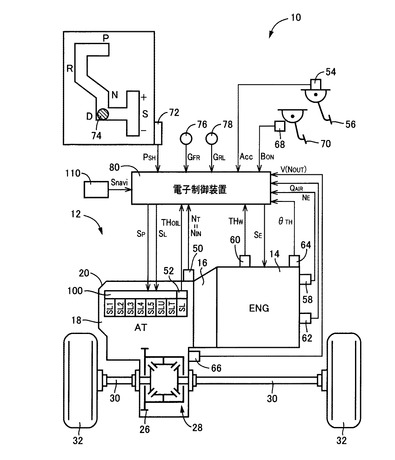
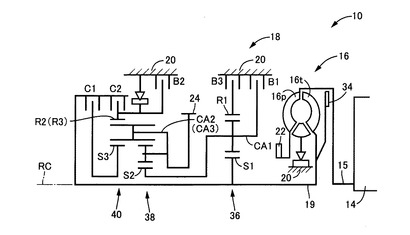
図1は、本発明が適用される車両10に備えられたエンジン14から駆動輪32までの動力伝達経路の概略構成を説明する図であると共に、エンジン14の出力制御、自動変速機18の変速制御などの為に車両10に設けられた制御系統の要部を説明する図である。また、図2は、自動変速機18などを説明する骨子図である。尚、トルクコンバータ16や自動変速機18等は中心線(軸心RC)に対して略対称的に構成されており、図2ではその中心線の下半分が省略されている。また、図2中の軸心RCはエンジン14、トルクコンバータ16の回転軸心である。
【0016】
図1,図2において、車両用動力伝達装置12(以下、動力伝達装置12という)は、車体にボルト止め等によって取り付けられる非回転部材としてのトランスアクスルケース20(以下、ケース20という)内の軸心RC上において、エンジン14側から順番に、トルクコンバータ16、自動変速機18等を備えている。また、動力伝達装置12は、自動変速機18の出力回転部材である出力歯車24と噛み合うデフリングギヤ26、そのデフリングギヤ26を一体的に備える差動歯車装置(ディファレンシャルギヤ)28、その差動歯車装置28に連結された1対の車軸30等を備えている。このように構成された動力伝達装置12は、例えばFF(フロントエンジン・フロントドライブ)型の車両10に好適に用いられるものである。動力伝達装置12において、駆動力源としてのエンジン14の動力は、クランク軸15から、トルクコンバータ16、自動変速機18、デフリングギヤ26、差動歯車装置28、及び1対の車軸30等を順次介して1対の駆動輪32へ伝達される。
【0017】
トルクコンバータ16は、ポンプ翼車16pとタービン翼車16tとの間で流体を介して動力伝達を行う流体伝動装置である。このポンプ翼車16pは、クランク軸15を介してエンジン14に連結されており、エンジン14からの駆動力が入力され且つ軸心RC回りに回転可能なトルクコンバータ16の入力側回転要素である。また、タービン翼車16tは、トルクコンバータ16の出力側回転要素であり、自動変速機18の入力回転部材である入力軸19にスプライン嵌合等によって相対回転不能に連結されている。また、ポンプ翼車16p及びタービン翼車16tの間には、それらの間すなわちトルクコンバータ16の入出力回転部材間を直結可能なロックアップクラッチ34が設けられている。また、ポンプ翼車16pには、自動変速機18を変速制御したり、ロックアップクラッチ34の作動を制御したり、或いは各部に潤滑油を供給したりする為の元圧となる作動油圧をエンジン14によって回転駆動されることにより発生する機械式のオイルポンプ22が連結されている。
【0018】
自動変速機18は、エンジン14から駆動輪32までの動力伝達経路の一部を構成し、複数の油圧式摩擦係合装置の何れかの掴み替えにより(すなわち油圧式摩擦係合装置の係合と解放とにより)変速が実行されて複数のギヤ段(変速段)が選択的に成立させられる有段式の自動変速機として機能する遊星歯車式多段変速機である。例えば、公知の車両によく用いられる所謂クラッチツゥクラッチ変速を行う有段変速機である。この自動変速機18は、シングルピニオン型の第1遊星歯車装置36と、ラビニヨ型に構成されているダブルピニオン型の第2遊星歯車装置38及びシングルピニオン型の第3遊星歯車装置40とを同軸線上(軸心RC上)に有し、入力軸19の回転を変速して出力歯車24から出力する。
【0019】
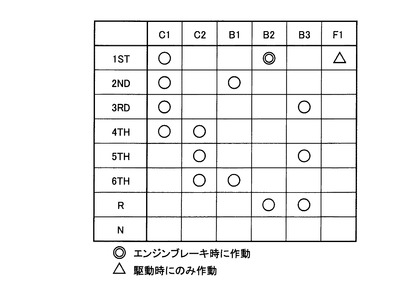
具体的には、自動変速機18は、第1遊星歯車装置36、第2遊星歯車装置38、及び第3遊星歯車装置40の各回転要素(サンギヤS1−S3、キャリアCA1−CA3、リングギヤR1−R3)が、直接的に或いは油圧式摩擦係合装置(クラッチC1,C2、及びブレーキB1,B2,B3)やワンウェイクラッチ(一方向クラッチ)F1を介して間接的(或いは選択的)に、一部が互いに連結されたり、入力軸19、ケース20、或いは出力歯車24に連結されている。そして、クラッチC1,C2、及びブレーキB1,B2,B3のそれぞれの係合解放制御により、運転者のアクセル操作や車速V等に応じて、図3の係合作動表に示すように前進6段、後進1段の各ギヤ段(各変速段)が成立させられる。図3の「1st」乃至「6th」は前進ギヤ段としての第1速ギヤ段乃至第6速ギヤ段、「R」は後進ギヤ段、「N」は何れのギヤ段も成立させられないニュートラル状態を意味している。図3の係合作動表は、上記各ギヤ段とクラッチC1,C2、及びブレーキB1,B2,B3の作動状態との関係をまとめたものであり、「○」は係合、「◎」はエンジンブレーキ時のみ係合、空欄は解放をそれぞれ表している。尚、第1速ギヤ段「1st」を成立させるブレーキB2には並列に一方向クラッチF1が設けられているため、発進時(加速時)には必ずしもブレーキB2を係合させる必要は無い。
【0020】
上記クラッチC1,C2、及びブレーキB1,B2,B3(以下、特に区別しない場合は単にクラッチC、ブレーキB、或いは係合装置という)は、公知の車両用自動変速機においてよく用いられている油圧式の摩擦クラッチであって、油圧アクチュエータにより押圧される湿式多板型のクラッチやブレーキ、油圧アクチュエータによって引き締められるバンドブレーキなどにより構成される。このように構成されたクラッチC及びブレーキBは、油圧制御回路100内のリニアソレノイドバルブSL1−SL5等の励磁、非励磁や電流制御により、それぞれのトルク容量すなわち係合力が例えば連続的に変化させられて、それぞれの係合、解放状態が切り換えられると共に、係合、解放時の過渡係合油圧などが制御される。
【0021】
図1に戻り、車両10には、例えば自動変速機18の変速制御を実行する動力伝達装置12の制御装置を含む電子制御装置80が備えられている。この電子制御装置80は、例えばCPU、RAM、ROM、入出力インターフェース等を備えた所謂マイクロコンピュータを含んで構成されており、CPUはRAMの一時記憶機能を利用しつつ予めROMに記憶されたプログラムに従って信号処理を行うことにより車両10の各種制御を実行する。例えば、電子制御装置80は、エンジン14の出力制御や自動変速機18の変速制御やロックアップクラッチ34のトルク容量制御等を実行するようになっており、必要に応じてエンジン制御用のエンジン制御装置や自動変速機18の変速制御用の油圧制御装置やロックアップクラッチ34の油圧制御用の油圧制御装置等に分けて構成される。
【0022】
電子制御装置80には、例えばタービン回転速度センサ50により検出されたトルクコンバータ16のタービン軸の回転速度であるタービン回転速度NT(すなわち入力軸19の回転速度である入力回転速度NIN)を表す信号、作動油温センサ52により検出された油圧制御回路100内の作動油(例えば公知のATF)の温度である作動油温THOILを表す信号、アクセル開度センサ54により検出された運転者による車両10に対する加速要求量(ドライバ要求量)としてのアクセルペダル56の操作量であるアクセル開度Accを表す信号、エンジン回転速度センサ58により検出されたエンジン14の回転速度であるエンジン回転速度NEを表す信号、冷却水温センサ60により検出されたエンジン14の冷却水温THWを表す信号、吸入空気量センサ62により検出されたエンジン14の吸入空気量QAIRを表す信号、スロットル弁開度センサ64により検出された電子スロットル弁の開度であるスロットル弁開度θTHを表す信号、車速センサ66により検出された車速Vに対応する出力歯車24の回転速度である出力回転速度NOUTを表す信号、ブレーキスイッチ68により検出された常用ブレーキであるフットブレーキの作動中(踏込操作中)を示すフットブレーキペダル70の操作(ブレーキオン)BONを表す信号、レバーポジションセンサ72により検出された「P」,「R」,「N」,「D」等のシフトレバー74のレバーポジション(操作位置、シフトポジション)PSHを表す信号、前後加速度センサ76により検出された車両10の前後方向(進行方向)の加速度である車両前後加速度GFR(前後GFR)を表す信号、左右加速度センサ78により検出された車両10の左右方向(進行方向に対して垂直方向)の加速度である車両左右加速度GRL(左右GRL)を表す信号、車両10に搭載されたナビゲーションシステム110(以下、ナビ110という)からの走行路に関する情報Snaviを表すカーナビ情報信号などがそれぞれ供給される。
【0023】
また、電子制御装置80からは、エンジン14の出力制御の為のエンジン出力制御指令信号SEとして、例えばアクセル開度Accに応じて電子スロットル弁の開閉を制御する為のスロットルアクチュエータへの駆動信号や燃料噴射装置から噴射される燃料噴射量を制御する為の噴射信号やイグナイタによるエンジン14の点火時期を制御する為の点火時期信号などが出力される。また、自動変速機18の変速制御の為の油圧制御指令信号SPとして、例えば自動変速機18のギヤ段を切り換える為に油圧制御回路100内のリニアソレノイドバルブSL1−SL5の励磁、非励磁などを制御する為のバルブ指令信号(油圧指令信号、油圧指令値、駆動信号)や第1ライン油圧PL1や第2ライン油圧PL2などを調圧制御する為のリニアソレノイドバルブSLTへの油圧指令信号などが油圧制御回路100へ出力される。また、ロックアップクラッチ34の係合、解放、及びスリップ量(差回転速度)NS(=NE−NT)を制御する為のロックアップ制御指令信号SLとして、例えば油圧制御回路100内に備えられたリニアソレノイド弁SLU及びソレノイド弁SLを駆動する為の油圧指令信号などが油圧制御回路100へ出力される。
【0024】
図4は、電子制御装置80による制御機能の要部を説明する機能ブロック線図である。図4において、エンジン出力制御部すなわちエンジン出力制御手段82は、例えばスロットル制御の為にスロットルアクチュエータにより電子スロットル弁を開閉制御する他、燃料噴射量制御の為に燃料噴射装置による燃料噴射量を制御し、点火時期制御の為にイグナイタ等の点火装置を制御するエンジン出力制御指令信号SEを出力する。例えば、エンジン出力制御手段82は、スロットル弁開度θTH(或いは吸入空気量QAIR等のエンジン負荷)をパラメータとしてエンジン回転速度NEとエンジントルクTEの推定値(以下推定エンジントルク)TE’との予め実験的に求められて記憶された公知の関係(エンジントルクマップ)から実際のエンジン回転速度NEに基づいて目標エンジントルクTE*が得られるスロットル弁開度θTHとなるように電子スロットル弁を開閉制御する他、燃料噴射装置による燃料噴射量を制御し、イグナイタ等の点火装置を制御する。上記目標エンジントルクTE*は、例えば加速要求量に対応するアクセル開度Accに基づいてそのアクセル開度Accが大きい程大きくされるように電子制御装置80により求められるものであり、ドライバー要求エンジントルクに相当する。
【0025】
変速制御部すなわち変速制御手段84は、例えば車速V及びアクセル開度Accを変数としてアップシフトが判断される為の変速線(アップシフト線)とダウンシフトが判断される為の変速線(ダウンシフト線)とを有する予め記憶された例えば図5に示すような関係(変速マップ、変速線図、基本変速マップ、通常変速線)から実際の車速V及びアクセル開度Accで示される車両状態に基づいて自動変速機18にて形成すべきギヤ段を判断し、自動変速機18の変速を実行すべきか否かを判断する。そして、変速制御手段84は、自動変速機18の変速を実行すべきであると判断した場合には、その判断したギヤ段が得られるように自動変速機18の基本変速制御(通常変速制御)を実行する変速指令を出力する。例えば、変速制御手段84は、図3に示す係合作動表に従ってギヤ段が達成されるように、自動変速機18のギヤ段の形成或いは自動変速機18の変速に関与する油圧式摩擦係合装置を係合させ且つ解放させる油圧制御指令信号(変速出力指令値)SPを油圧制御回路100へ出力する。油圧制御回路100は、自動変速機18の変速が実行されるように或いは自動変速機18の現在のギヤ段が維持されるように、その油圧制御指令信号SPに従って、油圧制御回路100内のリニアソレノイドバルブSL1−SL5を作動させて、そのギヤ段成立(形成)に関与する油圧式摩擦係合装置の各油圧アクチュエータを作動させる。上記図5の変速マップにおいて、実線はアップシフト線であり、破線はダウンシフト線である。この図5の変速マップにおける変速線は、例えば実際のアクセル開度Acc(%)を示す横線上において実際の車速Vが線を横切ったか否かすなわち変速線上の変速を実行すべき値(変速点車速)VSを越えたか否かを判断する為のものであり、この値VSすなわち変速点車速の連なりとして予め記憶されていることにもなる。
【0026】
図4に戻り、ナビ協調変速制御部すなわちナビ協調変速制御手段86は、上記図5に示すような変速マップを用いた変速制御手段84による基本変速制御とは別に、例えば車両10の走行路情報に基づいて自動変速機18の変速制御を実行する。つまり、ナビ協調変速制御手段86は、所定の条件が成立した場合には、高車速側が制限された所定の上限ギヤ段を選択することにより、変速制御手段84による基本変速制御の実行を制限する変速制限制御を一時的に実行する。
【0027】
例えば、ナビ協調変速制御手段86は、人工衛星からの電波に従って車両10の走行位置を決定する走行位置決定装置である公知のナビ110からの車両10の走行路情報、道路に設けられた発信装置などから送信される車両10周辺或いは車両10前方の状況に関連した情報などに基づいて、自動変速機18の変速を制御する。つまり、ナビ協調変速制御手段86は、ナビ110から取得した道路コーナー情報例えば進路前方に存在するカーブの情報、アクセルペダル56の操作の有無、フットブレーキペダル70の操作の有無などに基づいて、予め定められた関係から適切なギヤ段を選択する。具体的には、ナビ協調変速制御手段86は、アクセルオフのコーナー進入時には、適切なエンジンブレーキ力を獲得し且つコーナー脱出時のアクセルオンに伴う無駄な変速(例えばキックダウン)を抑制する為に、高車速側(ハイ側)が制限された所定の上限ギヤ段としてコーナー進入時の減速度に応じた最も高車速側(ハイ側)のギヤ段(最ハイギヤ段、最Highギヤ段)を選択する。これにより、アクセルオフのコーナー進入からコーナー脱出までの減速から加速に転じる際に、アクセルオンの再加速時の余裕駆動力を確保する為に、変速マップから判断されたギヤ段から上記変速制限制御により上記選択された最ハイギヤ段へのダウンシフトがアクセルオンに先立って実行され、そのダウンシフトされたギヤ段からのアップシフトすなわちこの変速制限制御が終了するまで基本変速制御における変速マップから判断されるギヤ段へのアップシフトが禁止される。
【0028】
ここで、コーナーをできるだけ速く走行しようとする場合には、よりコーナー付近でのより強いブレーキ操作(すなわち減速)となることを勘案すると、コーナー進入の際のフットブレーキ力が強い程すなわち減速度が大きい程、コーナー脱出の際の再加速時にアクセルペダル56の踏み込み量が多くなる、すなわちユーザが要求するであろう加速度(以下、要求加速度という;要求駆動力も同意)が大きくなると考えられる。また、実験的観点から、コーナー進入時の最大の合成加速度(以下、合成Gという)が再加速時の要求加速度と密接に関連すると考えられる。尚、上記合成Gは、前後GFRと左右GRLとの合成ベクトルの長さであり、次式(1)にて算出される。
合成G=√(GFR2+GRL2)=(GFR2+GRL2)(1/2) ・・・(1)
【0029】
このようなことから、ナビ協調変速制御手段86は、前記所定の条件としての前記変速制限制御を開始する為の開始条件が成立した場合には、合成Gと要求加速度との予め実験的に求められて記憶された関係(要求加速度マップ)から、開始条件成立時までの合成Gの最大値(最大合成G)に基づいて再加速時の要求加速度の最大値(最大要求加速度)を算出する。そして、ナビ協調変速制御手段86は、この最大要求加速度を発生することが可能な自動変速機18のギヤ段のうちで最も高車速側(ハイ側)のギヤ段(最ハイギヤ段、最Highギヤ段)を算出する。つまり、使っても良い最ハイギヤ段を算出する。従って、ナビ協調変速制御手段86は、開始条件が成立した場合にこの最ハイギヤ段を選択することで、実質的にこの最ハイギヤ段へのダウンシフトを実行し、この最ハイギヤ段よりも高車速側のギヤ段へのアップシフトを禁止する。尚、上記開始条件は、例えば前後GFR(負値)がある程度減速していることを見る為の所定値AFR(負値)以上且つ左右GRLが旋回動作に入っていない(未だコーナーに進入していない)ことを見る為の所定値ARL以下であって、前記変速制限制御を開始する為の前提条件が成立してからの前後GFR(負値)が最も大きくなったときに成立する。また、この前後GFR(負値)が最も大きくなったときは、例えば前後GFR(負値)の傾きが負値から零乃至正値へ変化したことにより判定される。また、この前提条件は、例えばシフトレバー74のレバーポジションPSHが「D」ポジションであって、前後GFR(負値)が上記所定値AFRよりも小さな所定値BFR(負値)以上且つ左右GRLが所定値ARL以下であるときに成立する。
【0030】
ところで、前記変速制限制御は、一時的に実行するものであり、いずれその変速制限制御を終了(解除)して、基本変速制御に復帰させる必要がある。しかしながら、この基本変速制御への復帰時にアップシフトが実行された場合、基本変速制御のみが実行されているときのアップシフトとは異なる条件下でのアップシフト指令となるので、復帰を判断したタイミングによってはそのときのアップシフトがドライバに違和感を与える可能性がある。
【0031】
そこで、本実施例の電子制御装置80は、例えば前記変速制限制御により自動変速機18のダウンシフトを実行した場合、前後GFR(駆動力も同意)が上昇から下降に転じたときに、そのダウンシフトされたギヤ段からの自動変速機18のアップシフトを許可する。つまり、前記変速制限制御を解除することで、前記基本変速制御による自動変速機18のアップシフトを許可する。これは、例えばコーナーを走行する際の減速から再加速に備えて変速制限制御を実行する場合、加速中に前後GFRがピークを打つことで初めて変速制限制御を実行する意義が終了するという観点からである。また、同様の観点から、本実施例の電子制御装置80は、前後GFRが正値であるときに、前後GFRが上昇から下降に転じたことを判定する。これにより、例えばブレーキ操作によって減速中に前後GFRのピークが発生したことで変速制限制御が解除されてしまうことが回避される。
【0032】
より具体的には、図4に戻り、開始条件成立判定部すなわち開始条件成立判定手段88は、前記前提条件が成立したか否かを判定する。また、開始条件成立判定手段88は、前記前提条件が成立したと判定した場合には、前記開始条件が成立したか否かを判定する。
【0033】
ナビ協調変速制御手段86は、開始条件成立判定手段88により前記開始条件が成立したと判定された場合には、変速制限制御を開始して、前記要求加速度マップから前記前提条件成立時から前記開始条件成立時までの最大合成Gに基づいて最大要求加速度を算出し、この最大要求加速度を出せる最ハイギヤ段を算出する。そして、ナビ協調変速制御手段86は、実質的にこの最ハイギヤ段へのダウンシフトを実行する指令を油圧制御回路100へ出力し、後述する終了条件成立判定手段90により終了条件が成立したと判定されるまでは、上記最ハイギヤ段よりも高車速側のギヤ段へのアップシフトを禁止する指令すなわち基本変速制御を実行しない指令を変速制御手段84へ出力する。
【0034】
終了条件成立判定部すなわち終了条件成立判定手段90は、ナビ協調変速制御手段86による前記変速制限制御の実行中に、その変速制限制御を終了する為の終了条件が成立したか否かを判定する。この終了条件は、例えば左右GRLがコーナーを抜けたことを見る為の所定値BRL以下であって、前記開始条件成立時からの前後GFR(正値)が最も大きくなったときすなわち前後GFRが上昇から下降に転じたときに成立する。
【0035】
本実施例では、前後GFRが上昇から下降に転じたことを以下の方法で判定する。例えば、終了条件成立判定手段90は、後述する図7に示すようなフローチャートにおいて所定の周期(サイクルタイム)毎に取得(検出)された前後GFRのある時点での(例えばn番目の)サンプリングデータGFR(n)が、このn番目のサンプリングデータGFRnの1サイクルタイム前のサンプリングデータGFR(n-1)を含む連続したmサイクルタイム前のサンプリングデータGFR(n-m)までのm個のサンプリングデータ[GFR(n-m)乃至GFR(n-1)]の内で前後GFRが最小値となるサンプリングデータよりも小さいとき(次式(2)参照)に、前後GFRが上昇から下降に転じたと判定する。
min[GFR(n-m)乃至GFR(n-1)]>GFRn ・・・(2)
【0036】
図6は、前後GFRが上昇から下降に転じたか否かを、n番目のサンプリングデータGFRnとこのn番目のサンプリングデータGFRnから5サイクルタイム前までの連続した5個のサンプリングデータ[GFR(n-5)乃至GFR(n-1)]とを用いて判定する場合を例示する図である。図6(a),(b)に示すように、黒丸で表した5個のサンプリングデータの内で前後GFRが最小値となるサンプリングデータMINの方が、二重丸で表したn番目のサンプリングデータGFRnの値以下であるときには、未だ前後GFRが上昇から下降に転じていないと判定される。一方で、図6(c)に示すように、二重丸で表したn番目のサンプリングデータGFRnが黒丸で表した5個のサンプリングデータの内で前後GFRが最小値となるサンプリングデータMINよりも小さいときには、前後GFRが上昇から下降に転じたと判定される。このように、本実施例における前後GFRが上昇から下降に転じたか否かの判定は、例えば前後GFRの傾きが正値から零乃至負値へ変化したことにより極大値が発生した時点を判定するものではなく、サンプリングデータの中に極大値があったことを判定するものである。従って、図6(d)に示すように、ノイズ等によって極大値MAXが一旦発生したとしても未だ前後GFRが上昇から下降に転じていないと判定されるので、誤判定が可及的に抑制される。
【0037】
ナビ協調変速制御手段86は、終了条件成立判定手段90により前記終了条件が成立したと判定された場合には、変速制限制御を終了(解除)して、上記最ハイギヤ段よりも高車速側のギヤ段へのアップシフト禁止を解除する指令すなわち基本変速制御へ復帰して変速マップに従って判断されるギヤ段へのアップシフトを許可する指令を変速制御手段84へ出力する。
【0038】
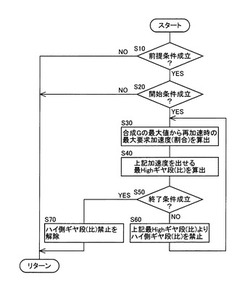
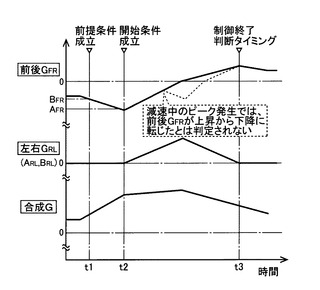
図7は、電子制御装置80の制御作動の要部すなわち変速制限制御によって制限された自動変速機18のギヤ段へのアップシフトに際してユーザに与える違和感を可及的に抑制する為の制御作動を説明するフローチャートであり、例えば数msec乃至数十msec程度の極めて短いサイクルタイムで繰り返し実行される。また、図8は、図7の制御作動に対応するタイムチャートである。
【0039】
図7において、先ず、開始条件成立判定手段88に対応するS10において、例えば前記前提条件(例えばレバーポジションPSHが「D」ポジションであって、前後GFR(負値)が前記所定値BFR(負値)以上且つ左右GRLが所定値ARL以下)が成立したか否かが判定される。このS10の判断が否定される場合は本ルーチンが終了させられるが肯定される場合(図8のt1時点)は同じく開始条件成立判定手段88に対応するS20において、例えば前記開始条件(例えば前後GFR(負値)が前記所定値AFR(負値)以上且つ左右GRLが前記所定値ARL以下であって、前記前提条件成立時からの前後GFR(負値)が最も大きくなった)が成立したか否かが判定される。このS20の判断が否定される場合は本ルーチンが終了させられるが肯定される場合(図8のt2時点)はナビ協調変速制御手段86に対応するS30において、前記変速制限制御が開始され、前記要求加速度マップから前記前提条件成立時から前記開始条件成立時までの最大合成Gに基づいて最大要求加速度が算出される。次いで、同じくナビ協調変速制御手段86に対応するS40において、上記S30にて算出された最大要求加速度を出せる最ハイギヤ段が算出される。次いで、終了条件成立判定手段90に対応するS50において、例えば前記終了条件(例えば左右GRLが所定値BRL以下であって、前記開始条件成立時からの前後GFR(正値)が最も大きくなったすなわち前後GFRが上昇から下降に転じた)が成立したか否かが判定される。当初はこのS50の判断が否定されるのでナビ協調変速制御手段86に対応するS60において、上記S40にて算出された最ハイギヤ段へのダウンシフトが実行され、その最ハイギヤ段よりも高車速側のギヤ段へのアップシフトが禁止される。一方、上記S50の判断が肯定される(図8のt3時点)と同じくナビ協調変速制御手段86に対応するS70において、前記変速制限制御が終了(解除)され、上記最ハイギヤ段よりも高車速側のギヤ段へのアップシフト禁止が解除されるすなわち変速マップに従って判断されるギヤ段へのアップシフトが許可される。尚、上記S50では、前後GFRが正値であるときに前後GFRが上昇から下降に転じたことが判定されるので、例えば図8の破線に示すようにブレーキ操作によって減速中に前後GFRのピークが発生したとしても、前後GFRが上昇から下降に転じたとは判定されない。
【0040】
上述のように、本実施例によれば、ナビ協調変速制御手段86による前記変速制限制御により自動変速機18のダウンシフトを実行した場合、前後GFRが上昇から下降に転じたときに、そのダウンシフトされたギヤ段からの自動変速機18のアップシフトが許可されるので、ユーザが求める加速感がピークを打って下がり始めているときにアップシフトによる加速感の減少を感じることになり、前記変速制限制御によって制限された自動変速機18の高車速側のギヤ段(ハイギヤ段)へのアップシフトに際してユーザに与える違和感を可及的に抑制することができる。つまり、自動変速機18の基本変速制御の実行を制限する変速制限制御の終了を適切に判断することができ、その変速制限制御の終了に伴って自動変速機18のアップシフトが実行された際にユーザに与える違和感を可及的に抑制することができる。
【0041】
また、本実施例によれば、前記変速制限制御を解除することで、前記基本変速制御による自動変速機18のアップシフトを許可するので、自動変速機18の基本変速制御への復帰が適切に判断され、その基本変速制御への復帰に伴って自動変速機18のアップシフトが実行された際にユーザに与える違和感を可及的に抑制することができる。
【0042】
また、本実施例によれば、所定の周期毎に取得された前後GFRのn番目のサンプリングデータGFR(n)が、そのn番目のサンプリングデータGFRnの1つ前を含む連続したm個前までのm個のサンプリングデータ[GFR(n-m)乃至GFR(n-1)]の内で前後GFRが最小値となるサンプリングデータよりも小さいときに、前後GFRが上昇から下降に転じたと判定するので、前後GFRが上昇から下降に転じたことが適切に判定される。例えば、前後GFRの変化の傾きが正値から負値へと変化したことで判定する場合と比較して、ノイズ等により誤判定してしまうことが抑制される。
【0043】
また、本実施例によれば、前後GFRが正値であるときに前後GFRが上昇から下降に転じたことを判定するので、減速中に前後GFRのピークが発生したことで前記変速制限制御が解除されてしまうことが回避される。つまり、例えば減速から再加速に備えて変速制限制御を実行する場合、加速中に前後GFRがピークを打つことで初めて変速制限制御を実行する意義が終了することに対して、加速時に前後GFRのピークが発生したときに変速制限制御が適切に解除される。
【0044】
以上、本発明の実施例を図面に基づいて詳細に説明したが、本発明はその他の態様においても適用される。
【0045】
例えば、前述の実施例では、ナビ協調変速制御手段86による変速制限制御を終了する為の終了条件の1つとして、前後GFRが上昇から下降に転じたか否かを判定したが、必ずしも前後GFRの変化で見る必要はない。例えば、前後GFRの変化に相当する他のパラメータである駆動力や駆動トルクなどの変化で見ても良い。このようにしても、本発明は適用され得る。
【0046】
また、前述の実施例では、前後GFRが上昇から下降に転じたか否かを、n番目のサンプリングデータGFR(n)がそれよりも連続したm個前までのサンプリングデータの内で最小値となるサンプリングデータよりも小さいか否かで判定したが、これに限らず、例えば前後GFRの傾きが正値から零乃至負値へ変化したか否かで判定しても良い。このようにしても、前記変速制限制御によって制限された自動変速機18の高車速側のギヤ段へのアップシフトに際してユーザに与える違和感を可及的に抑制することができるという、本発明の一定の効果は得られる。
【0047】
また、前述の実施例では、変速マップに従った自動変速機18の基本変速制御の実行を制限する変速制限制御として、ナビ協調変速制御手段86による道路コーナー情報に基づくギヤ段の選択を例示したが、必ずしもこれに限らない。例えば、登降坂路か否かの判定結果に基づいて自動変速機18の高車速側のギヤ段への変速を制限する登降坂変速制御などであっても、本発明は適用され得る。
【0048】
また、前述の実施例では、自動変速機18が前進6速、後進1速の変速が可能な自動変速機であったが、自動変速機のギヤ段数や内部構造は特に前述した自動変速機18に限定されるものではない。また、無段変速機や所謂DCT(Dual Clutch Transmission)などの自動変速機であっても本発明を適用することができる。尚、無段変速機の場合には、自動変速機18のギヤ段に相当するギヤ比が用いられ、前記変速制限制御が実行されるときには、高車速側のギヤ比(ハイギヤ比)の使用が制限される。
【0049】
また、前述の実施例では、流体伝動装置としてトルクコンバータ16が用いられていたが、トルク増幅作用のないフルードカップリングが用いられても良い。また、流体伝動装置は必ずしも備えられる必要はない。
【0050】
尚、上述したのはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【符号の説明】
【0051】
12:車両用動力伝達装置
14:エンジン(駆動力源)
18:自動変速機
32:駆動輪
80:電子制御装置(制御装置)
【技術分野】
【0001】
本発明は、通常の関係に従って自動変速機の変速制御を実行する一方で、その通常の関係とは異なる方法で自動変速機のギヤ段或いはギヤ比を選択することができる車両用動力伝達装置の制御装置に関するものである。
【背景技術】
【0002】
駆動力源からの動力を駆動輪側へ伝達する自動変速機を備えた車両が良く知られている。例えば、特許文献1,2に記載された車両がそれである。一般に、このような自動変速機は、予め記憶された関係(変速マップ)から車速やアクセル開度等の車両状態に基づいてギヤ段(変速段)或いはギヤ比(変速比)が判断され、その判断されたギヤ段(ギヤ比も同意)となるように基本変速制御が実行される。一方、高車速側が制限された所定の上限ギヤ段を選択することにより、上記変速マップから判断されるギヤ段へのアップシフトを禁止したり或いはそのギヤ段からダウンシフトする制御、すなわち変速マップに従ったギヤ段選択に制約を加えて上記基本変速制御の実行を制限する変速制限制御が実行される場合もある。例えば、特許文献1には、次変速段余裕駆動力ポテンシャルと現変速段余裕駆動力ポテンシャルとの差が余裕駆動力差しきい値以上のときは、変速マップから選択された変速段へのアップシフトを許可し、余裕駆動力差しきい値未満のときは、そのアップシフトを禁止することが記載されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−208194号公報
【特許文献2】特開2005−9510号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ところで、上述したような変速制限制御は、所定の条件が成立したときに一時的に実行するものであり、いずれその変速制限制御を終了(解除)して、変速マップに従って変速を実行する基本変速制御に復帰させる必要がある。例えば、ドライバの所定操作が為されてから所定時間が経過したとき、又は車両加速度が所定加速度を跨いだときなどに、変速制限制御の終了(基本変速制御への復帰)を判断することが考えられる。しかしながら、このような判断は、実際値と所定値との大小関係で決定される為、種々の走行状態に応じた適切な所定値を設定する必要があり、車速や走行路の状態(コーナの旋回半径、登降坂路の勾配)やアクセルペダル操作等の多くのパラメータが存在することを考慮すると、適切な所定値を設定し難い可能性がある。加えて、所定値の設定時に考慮されていないシチュエーションや車両状態が発生する可能性がある。そうすると、基本変速制御への復帰時にアップシフトが実行された場合、基本変速制御のみが実行されているときのアップシフトとは異なる条件下でのアップシフト指令となるので、復帰を判断したタイミングによってはそのときのアップシフトがドライバに違和感を与える可能性がある。尚、このような課題は未公知であり、変速制限制御によって制限されたギヤ段或いはギヤ比へユーザに違和感を与えることなくアップシフトすることについて未だ提案されていない。
【0005】
本発明は、以上の事情を背景として為されたものであり、その目的とするところは、変速制限制御によって制限された自動変速機のギヤ段或いはギヤ比へのアップシフトに際してユーザに与える違和感を可及的に抑制することができる車両用動力伝達装置の制御装置を提供することにある。
【課題を解決するための手段】
【0006】
前記目的を達成する為の第1の発明の要旨とするところは、(a) 駆動力源からの動力を駆動輪側へ伝達する自動変速機を備え、その自動変速機を予め記憶された関係から車両状態に基づいて判断したギヤ段或いはギヤ比とする基本変速制御を実行する一方で、所定の条件が成立した場合には高車速側が制限された所定の上限ギヤ段或いはギヤ比を選択することによりその基本変速制御の実行を制限する変速制限制御を一時的に実行する車両用動力伝達装置の制御装置であって、(b) 前記変速制限制御により前記自動変速機のダウンシフトを実行した場合、車両前後加速度或いは駆動力が上昇から下降に転じたときに、そのダウンシフトされたギヤ段或いはギヤ比からのその自動変速機のアップシフトを許可することにある。
【発明の効果】
【0007】
このようにすれば、前記変速制限制御により前記自動変速機のダウンシフトを実行した場合、車両前後加速度或いは駆動力が上昇から下降に転じたときに、そのダウンシフトされたギヤ段或いはギヤ比からのその自動変速機のアップシフトが許可されるので、ユーザが求める加速感がピークを打って下がり始めているときにアップシフトによる加速感の減少を感じることになり、変速制限制御によって制限された自動変速機のギヤ段或いはギヤ比へのアップシフトに際してユーザに与える違和感を可及的に抑制することができる。つまり、自動変速機の基本変速制御の実行を制限する変速制限制御の終了を適切に判断することができ、その変速制限制御の終了に伴って自動変速機のアップシフトが実行された際にユーザに与える違和感を可及的に抑制することができる。
【0008】
ここで、第2の発明は、前記第1の発明に記載の車両用動力伝達装置の制御装置において、前記変速制限制御を解除することで、前記基本変速制御による前記自動変速機のアップシフトを許可することにある。このようにすれば、自動変速機の基本変速制御への復帰が適切に判断され、その基本変速制御への復帰に伴って自動変速機のアップシフトが実行された際にユーザに与える違和感を可及的に抑制することができる。
【0009】
また、第3の発明は、前記第1の発明又は第2の発明に記載の車両用動力伝達装置の制御装置において、所定の周期毎に取得された前記車両前後加速度或いは駆動力のn番目のサンプリングデータが、そのn番目のサンプリングデータの1つ前のサンプリングデータを含む連続したm個前までのそのm個のサンプリングデータの内の最小値となるサンプリングデータよりも小さいときに、その車両前後加速度或いは駆動力が上昇から下降に転じたと判定することにある。このようにすれば、車両前後加速度或いは駆動力が上昇から下降に転じたことが適切に判定される。例えば、車両前後加速度或いは駆動力の変化の傾きが正値から負値へと変化したことで判定する場合と比較して、ノイズ等により誤判定してしまうことが抑制される。
【0010】
また、第4の発明は、前記第1の発明乃至第3の発明の何れか1つに記載の車両用動力伝達装置の制御装置において、前記車両前後加速度或いは駆動力が正値であるときに、その車両前後加速度或いは駆動力が上昇から下降に転じたことを判定することにある。このようにすれば、減速中に車両前後加速度或いは駆動力のピークが発生したことで変速制限制御が解除されてしまうことが回避される。つまり、例えば減速から再加速に備えて変速制限制御を実行する場合、加速中に車両前後加速度或いは駆動力がピークを打つことで初めて変速制限制御を実行する意義が終了することに対して、加速時に車両前後加速度或いは駆動力のピークが発生したときに変速制限制御が適切に解除される。
【図面の簡単な説明】
【0011】
【図1】本発明が適用される車両に備えられた動力伝達経路の概略構成を説明する図であると共に、車両に設けられた制御系統の要部を説明する図である。
【図2】自動変速機などの構成を説明する骨子図である。
【図3】自動変速機の変速作動とそれに用いられる係合装置の作動の組み合わせとの関係を説明する作動図表である。
【図4】電子制御装置の制御機能の要部を説明する機能ブロック線図である。
【図5】自動変速機の基本変速制御においてギヤ段の決定に用いられる変速線図の一例を示す図である。
【図6】前後が上昇から下降に転じたか否かを、n番目のサンプリングデータと5サイクルタイム前までの連続した5個のサンプリングデータとを用いて判定する場合を例示する図である。
【図7】電子制御装置の制御作動の要部すなわち変速制限制御によって制限された自動変速機のギヤ段へのアップシフトに際してユーザに与える違和感を可及的に抑制する為の制御作動を説明するフローチャートである。
【図8】図7の制御作動に対応するタイムチャートである。
【発明を実施するための形態】
【0012】
本発明において、好適には、前記駆動力源としては、例えば燃料の燃焼によって動力を発生する内燃機関等のガソリンエンジンやディーゼルエンジン等が好適に用いられるが、電動機等の他の原動機を単独で、或いはエンジンと組み合わせて採用することもできる。
【0013】
また、好適には、前記自動変速機は、例えば複数組の遊星歯車装置の回転要素が係合装置によって選択的に連結されることにより複数のギヤ段(変速段)が択一的に達成される公知の遊星歯車式自動変速機、常時噛み合う複数対の変速ギヤを2軸間に備えてそれら複数対の変速ギヤのいずれかを同期装置によって択一的に動力伝達状態とする同期噛合型平行2軸式変速機ではあるが油圧アクチュエータにより駆動される同期装置によってギヤ段が自動的に切換られることが可能な同期噛合型平行2軸式自動変速機、同期噛合型平行2軸式自動変速機であるが入力軸を2系統備えて各系統の入力軸にクラッチがそれぞれ繋がり更にそれぞれ偶数段と奇数段へと繋がっている型式の変速機である所謂DCT(Dual Clutch Transmission)、動力伝達部材として機能する伝動ベルトが有効径が可変である一対の可変プーリに巻き掛けられギヤ比(変速比)が無段階に連続的に変化させられる所謂ベルト式無段変速機、共通の軸心まわりに回転させられる一対のコーンとその軸心と交差する回転中心回転可能な複数個のローラがそれら一対のコーンの間で挟圧されそのローラの回転中心と軸心との交差角が変化させられることによって変速比が可変とされた所謂トラクション型無段変速機などにより構成される。また、前記自動変速機の車両に対する搭載姿勢は、その自動変速機の軸線が車両の幅方向となるFF(フロントエンジン・フロントドライブ)車両などの横置き型でも、その自動変速機の軸線が車両の前後方向となるFR(フロントエンジン・リヤドライブ)車両などの縦置き型でも良い。
【0014】
以下、本発明の実施例を図面を参照しつつ詳細に説明する。
【実施例】
【0015】
図1は、本発明が適用される車両10に備えられたエンジン14から駆動輪32までの動力伝達経路の概略構成を説明する図であると共に、エンジン14の出力制御、自動変速機18の変速制御などの為に車両10に設けられた制御系統の要部を説明する図である。また、図2は、自動変速機18などを説明する骨子図である。尚、トルクコンバータ16や自動変速機18等は中心線(軸心RC)に対して略対称的に構成されており、図2ではその中心線の下半分が省略されている。また、図2中の軸心RCはエンジン14、トルクコンバータ16の回転軸心である。
【0016】
図1,図2において、車両用動力伝達装置12(以下、動力伝達装置12という)は、車体にボルト止め等によって取り付けられる非回転部材としてのトランスアクスルケース20(以下、ケース20という)内の軸心RC上において、エンジン14側から順番に、トルクコンバータ16、自動変速機18等を備えている。また、動力伝達装置12は、自動変速機18の出力回転部材である出力歯車24と噛み合うデフリングギヤ26、そのデフリングギヤ26を一体的に備える差動歯車装置(ディファレンシャルギヤ)28、その差動歯車装置28に連結された1対の車軸30等を備えている。このように構成された動力伝達装置12は、例えばFF(フロントエンジン・フロントドライブ)型の車両10に好適に用いられるものである。動力伝達装置12において、駆動力源としてのエンジン14の動力は、クランク軸15から、トルクコンバータ16、自動変速機18、デフリングギヤ26、差動歯車装置28、及び1対の車軸30等を順次介して1対の駆動輪32へ伝達される。
【0017】
トルクコンバータ16は、ポンプ翼車16pとタービン翼車16tとの間で流体を介して動力伝達を行う流体伝動装置である。このポンプ翼車16pは、クランク軸15を介してエンジン14に連結されており、エンジン14からの駆動力が入力され且つ軸心RC回りに回転可能なトルクコンバータ16の入力側回転要素である。また、タービン翼車16tは、トルクコンバータ16の出力側回転要素であり、自動変速機18の入力回転部材である入力軸19にスプライン嵌合等によって相対回転不能に連結されている。また、ポンプ翼車16p及びタービン翼車16tの間には、それらの間すなわちトルクコンバータ16の入出力回転部材間を直結可能なロックアップクラッチ34が設けられている。また、ポンプ翼車16pには、自動変速機18を変速制御したり、ロックアップクラッチ34の作動を制御したり、或いは各部に潤滑油を供給したりする為の元圧となる作動油圧をエンジン14によって回転駆動されることにより発生する機械式のオイルポンプ22が連結されている。
【0018】
自動変速機18は、エンジン14から駆動輪32までの動力伝達経路の一部を構成し、複数の油圧式摩擦係合装置の何れかの掴み替えにより(すなわち油圧式摩擦係合装置の係合と解放とにより)変速が実行されて複数のギヤ段(変速段)が選択的に成立させられる有段式の自動変速機として機能する遊星歯車式多段変速機である。例えば、公知の車両によく用いられる所謂クラッチツゥクラッチ変速を行う有段変速機である。この自動変速機18は、シングルピニオン型の第1遊星歯車装置36と、ラビニヨ型に構成されているダブルピニオン型の第2遊星歯車装置38及びシングルピニオン型の第3遊星歯車装置40とを同軸線上(軸心RC上)に有し、入力軸19の回転を変速して出力歯車24から出力する。
【0019】
具体的には、自動変速機18は、第1遊星歯車装置36、第2遊星歯車装置38、及び第3遊星歯車装置40の各回転要素(サンギヤS1−S3、キャリアCA1−CA3、リングギヤR1−R3)が、直接的に或いは油圧式摩擦係合装置(クラッチC1,C2、及びブレーキB1,B2,B3)やワンウェイクラッチ(一方向クラッチ)F1を介して間接的(或いは選択的)に、一部が互いに連結されたり、入力軸19、ケース20、或いは出力歯車24に連結されている。そして、クラッチC1,C2、及びブレーキB1,B2,B3のそれぞれの係合解放制御により、運転者のアクセル操作や車速V等に応じて、図3の係合作動表に示すように前進6段、後進1段の各ギヤ段(各変速段)が成立させられる。図3の「1st」乃至「6th」は前進ギヤ段としての第1速ギヤ段乃至第6速ギヤ段、「R」は後進ギヤ段、「N」は何れのギヤ段も成立させられないニュートラル状態を意味している。図3の係合作動表は、上記各ギヤ段とクラッチC1,C2、及びブレーキB1,B2,B3の作動状態との関係をまとめたものであり、「○」は係合、「◎」はエンジンブレーキ時のみ係合、空欄は解放をそれぞれ表している。尚、第1速ギヤ段「1st」を成立させるブレーキB2には並列に一方向クラッチF1が設けられているため、発進時(加速時)には必ずしもブレーキB2を係合させる必要は無い。
【0020】
上記クラッチC1,C2、及びブレーキB1,B2,B3(以下、特に区別しない場合は単にクラッチC、ブレーキB、或いは係合装置という)は、公知の車両用自動変速機においてよく用いられている油圧式の摩擦クラッチであって、油圧アクチュエータにより押圧される湿式多板型のクラッチやブレーキ、油圧アクチュエータによって引き締められるバンドブレーキなどにより構成される。このように構成されたクラッチC及びブレーキBは、油圧制御回路100内のリニアソレノイドバルブSL1−SL5等の励磁、非励磁や電流制御により、それぞれのトルク容量すなわち係合力が例えば連続的に変化させられて、それぞれの係合、解放状態が切り換えられると共に、係合、解放時の過渡係合油圧などが制御される。
【0021】
図1に戻り、車両10には、例えば自動変速機18の変速制御を実行する動力伝達装置12の制御装置を含む電子制御装置80が備えられている。この電子制御装置80は、例えばCPU、RAM、ROM、入出力インターフェース等を備えた所謂マイクロコンピュータを含んで構成されており、CPUはRAMの一時記憶機能を利用しつつ予めROMに記憶されたプログラムに従って信号処理を行うことにより車両10の各種制御を実行する。例えば、電子制御装置80は、エンジン14の出力制御や自動変速機18の変速制御やロックアップクラッチ34のトルク容量制御等を実行するようになっており、必要に応じてエンジン制御用のエンジン制御装置や自動変速機18の変速制御用の油圧制御装置やロックアップクラッチ34の油圧制御用の油圧制御装置等に分けて構成される。
【0022】
電子制御装置80には、例えばタービン回転速度センサ50により検出されたトルクコンバータ16のタービン軸の回転速度であるタービン回転速度NT(すなわち入力軸19の回転速度である入力回転速度NIN)を表す信号、作動油温センサ52により検出された油圧制御回路100内の作動油(例えば公知のATF)の温度である作動油温THOILを表す信号、アクセル開度センサ54により検出された運転者による車両10に対する加速要求量(ドライバ要求量)としてのアクセルペダル56の操作量であるアクセル開度Accを表す信号、エンジン回転速度センサ58により検出されたエンジン14の回転速度であるエンジン回転速度NEを表す信号、冷却水温センサ60により検出されたエンジン14の冷却水温THWを表す信号、吸入空気量センサ62により検出されたエンジン14の吸入空気量QAIRを表す信号、スロットル弁開度センサ64により検出された電子スロットル弁の開度であるスロットル弁開度θTHを表す信号、車速センサ66により検出された車速Vに対応する出力歯車24の回転速度である出力回転速度NOUTを表す信号、ブレーキスイッチ68により検出された常用ブレーキであるフットブレーキの作動中(踏込操作中)を示すフットブレーキペダル70の操作(ブレーキオン)BONを表す信号、レバーポジションセンサ72により検出された「P」,「R」,「N」,「D」等のシフトレバー74のレバーポジション(操作位置、シフトポジション)PSHを表す信号、前後加速度センサ76により検出された車両10の前後方向(進行方向)の加速度である車両前後加速度GFR(前後GFR)を表す信号、左右加速度センサ78により検出された車両10の左右方向(進行方向に対して垂直方向)の加速度である車両左右加速度GRL(左右GRL)を表す信号、車両10に搭載されたナビゲーションシステム110(以下、ナビ110という)からの走行路に関する情報Snaviを表すカーナビ情報信号などがそれぞれ供給される。
【0023】
また、電子制御装置80からは、エンジン14の出力制御の為のエンジン出力制御指令信号SEとして、例えばアクセル開度Accに応じて電子スロットル弁の開閉を制御する為のスロットルアクチュエータへの駆動信号や燃料噴射装置から噴射される燃料噴射量を制御する為の噴射信号やイグナイタによるエンジン14の点火時期を制御する為の点火時期信号などが出力される。また、自動変速機18の変速制御の為の油圧制御指令信号SPとして、例えば自動変速機18のギヤ段を切り換える為に油圧制御回路100内のリニアソレノイドバルブSL1−SL5の励磁、非励磁などを制御する為のバルブ指令信号(油圧指令信号、油圧指令値、駆動信号)や第1ライン油圧PL1や第2ライン油圧PL2などを調圧制御する為のリニアソレノイドバルブSLTへの油圧指令信号などが油圧制御回路100へ出力される。また、ロックアップクラッチ34の係合、解放、及びスリップ量(差回転速度)NS(=NE−NT)を制御する為のロックアップ制御指令信号SLとして、例えば油圧制御回路100内に備えられたリニアソレノイド弁SLU及びソレノイド弁SLを駆動する為の油圧指令信号などが油圧制御回路100へ出力される。
【0024】
図4は、電子制御装置80による制御機能の要部を説明する機能ブロック線図である。図4において、エンジン出力制御部すなわちエンジン出力制御手段82は、例えばスロットル制御の為にスロットルアクチュエータにより電子スロットル弁を開閉制御する他、燃料噴射量制御の為に燃料噴射装置による燃料噴射量を制御し、点火時期制御の為にイグナイタ等の点火装置を制御するエンジン出力制御指令信号SEを出力する。例えば、エンジン出力制御手段82は、スロットル弁開度θTH(或いは吸入空気量QAIR等のエンジン負荷)をパラメータとしてエンジン回転速度NEとエンジントルクTEの推定値(以下推定エンジントルク)TE’との予め実験的に求められて記憶された公知の関係(エンジントルクマップ)から実際のエンジン回転速度NEに基づいて目標エンジントルクTE*が得られるスロットル弁開度θTHとなるように電子スロットル弁を開閉制御する他、燃料噴射装置による燃料噴射量を制御し、イグナイタ等の点火装置を制御する。上記目標エンジントルクTE*は、例えば加速要求量に対応するアクセル開度Accに基づいてそのアクセル開度Accが大きい程大きくされるように電子制御装置80により求められるものであり、ドライバー要求エンジントルクに相当する。
【0025】
変速制御部すなわち変速制御手段84は、例えば車速V及びアクセル開度Accを変数としてアップシフトが判断される為の変速線(アップシフト線)とダウンシフトが判断される為の変速線(ダウンシフト線)とを有する予め記憶された例えば図5に示すような関係(変速マップ、変速線図、基本変速マップ、通常変速線)から実際の車速V及びアクセル開度Accで示される車両状態に基づいて自動変速機18にて形成すべきギヤ段を判断し、自動変速機18の変速を実行すべきか否かを判断する。そして、変速制御手段84は、自動変速機18の変速を実行すべきであると判断した場合には、その判断したギヤ段が得られるように自動変速機18の基本変速制御(通常変速制御)を実行する変速指令を出力する。例えば、変速制御手段84は、図3に示す係合作動表に従ってギヤ段が達成されるように、自動変速機18のギヤ段の形成或いは自動変速機18の変速に関与する油圧式摩擦係合装置を係合させ且つ解放させる油圧制御指令信号(変速出力指令値)SPを油圧制御回路100へ出力する。油圧制御回路100は、自動変速機18の変速が実行されるように或いは自動変速機18の現在のギヤ段が維持されるように、その油圧制御指令信号SPに従って、油圧制御回路100内のリニアソレノイドバルブSL1−SL5を作動させて、そのギヤ段成立(形成)に関与する油圧式摩擦係合装置の各油圧アクチュエータを作動させる。上記図5の変速マップにおいて、実線はアップシフト線であり、破線はダウンシフト線である。この図5の変速マップにおける変速線は、例えば実際のアクセル開度Acc(%)を示す横線上において実際の車速Vが線を横切ったか否かすなわち変速線上の変速を実行すべき値(変速点車速)VSを越えたか否かを判断する為のものであり、この値VSすなわち変速点車速の連なりとして予め記憶されていることにもなる。
【0026】
図4に戻り、ナビ協調変速制御部すなわちナビ協調変速制御手段86は、上記図5に示すような変速マップを用いた変速制御手段84による基本変速制御とは別に、例えば車両10の走行路情報に基づいて自動変速機18の変速制御を実行する。つまり、ナビ協調変速制御手段86は、所定の条件が成立した場合には、高車速側が制限された所定の上限ギヤ段を選択することにより、変速制御手段84による基本変速制御の実行を制限する変速制限制御を一時的に実行する。
【0027】
例えば、ナビ協調変速制御手段86は、人工衛星からの電波に従って車両10の走行位置を決定する走行位置決定装置である公知のナビ110からの車両10の走行路情報、道路に設けられた発信装置などから送信される車両10周辺或いは車両10前方の状況に関連した情報などに基づいて、自動変速機18の変速を制御する。つまり、ナビ協調変速制御手段86は、ナビ110から取得した道路コーナー情報例えば進路前方に存在するカーブの情報、アクセルペダル56の操作の有無、フットブレーキペダル70の操作の有無などに基づいて、予め定められた関係から適切なギヤ段を選択する。具体的には、ナビ協調変速制御手段86は、アクセルオフのコーナー進入時には、適切なエンジンブレーキ力を獲得し且つコーナー脱出時のアクセルオンに伴う無駄な変速(例えばキックダウン)を抑制する為に、高車速側(ハイ側)が制限された所定の上限ギヤ段としてコーナー進入時の減速度に応じた最も高車速側(ハイ側)のギヤ段(最ハイギヤ段、最Highギヤ段)を選択する。これにより、アクセルオフのコーナー進入からコーナー脱出までの減速から加速に転じる際に、アクセルオンの再加速時の余裕駆動力を確保する為に、変速マップから判断されたギヤ段から上記変速制限制御により上記選択された最ハイギヤ段へのダウンシフトがアクセルオンに先立って実行され、そのダウンシフトされたギヤ段からのアップシフトすなわちこの変速制限制御が終了するまで基本変速制御における変速マップから判断されるギヤ段へのアップシフトが禁止される。
【0028】
ここで、コーナーをできるだけ速く走行しようとする場合には、よりコーナー付近でのより強いブレーキ操作(すなわち減速)となることを勘案すると、コーナー進入の際のフットブレーキ力が強い程すなわち減速度が大きい程、コーナー脱出の際の再加速時にアクセルペダル56の踏み込み量が多くなる、すなわちユーザが要求するであろう加速度(以下、要求加速度という;要求駆動力も同意)が大きくなると考えられる。また、実験的観点から、コーナー進入時の最大の合成加速度(以下、合成Gという)が再加速時の要求加速度と密接に関連すると考えられる。尚、上記合成Gは、前後GFRと左右GRLとの合成ベクトルの長さであり、次式(1)にて算出される。
合成G=√(GFR2+GRL2)=(GFR2+GRL2)(1/2) ・・・(1)
【0029】
このようなことから、ナビ協調変速制御手段86は、前記所定の条件としての前記変速制限制御を開始する為の開始条件が成立した場合には、合成Gと要求加速度との予め実験的に求められて記憶された関係(要求加速度マップ)から、開始条件成立時までの合成Gの最大値(最大合成G)に基づいて再加速時の要求加速度の最大値(最大要求加速度)を算出する。そして、ナビ協調変速制御手段86は、この最大要求加速度を発生することが可能な自動変速機18のギヤ段のうちで最も高車速側(ハイ側)のギヤ段(最ハイギヤ段、最Highギヤ段)を算出する。つまり、使っても良い最ハイギヤ段を算出する。従って、ナビ協調変速制御手段86は、開始条件が成立した場合にこの最ハイギヤ段を選択することで、実質的にこの最ハイギヤ段へのダウンシフトを実行し、この最ハイギヤ段よりも高車速側のギヤ段へのアップシフトを禁止する。尚、上記開始条件は、例えば前後GFR(負値)がある程度減速していることを見る為の所定値AFR(負値)以上且つ左右GRLが旋回動作に入っていない(未だコーナーに進入していない)ことを見る為の所定値ARL以下であって、前記変速制限制御を開始する為の前提条件が成立してからの前後GFR(負値)が最も大きくなったときに成立する。また、この前後GFR(負値)が最も大きくなったときは、例えば前後GFR(負値)の傾きが負値から零乃至正値へ変化したことにより判定される。また、この前提条件は、例えばシフトレバー74のレバーポジションPSHが「D」ポジションであって、前後GFR(負値)が上記所定値AFRよりも小さな所定値BFR(負値)以上且つ左右GRLが所定値ARL以下であるときに成立する。
【0030】
ところで、前記変速制限制御は、一時的に実行するものであり、いずれその変速制限制御を終了(解除)して、基本変速制御に復帰させる必要がある。しかしながら、この基本変速制御への復帰時にアップシフトが実行された場合、基本変速制御のみが実行されているときのアップシフトとは異なる条件下でのアップシフト指令となるので、復帰を判断したタイミングによってはそのときのアップシフトがドライバに違和感を与える可能性がある。
【0031】
そこで、本実施例の電子制御装置80は、例えば前記変速制限制御により自動変速機18のダウンシフトを実行した場合、前後GFR(駆動力も同意)が上昇から下降に転じたときに、そのダウンシフトされたギヤ段からの自動変速機18のアップシフトを許可する。つまり、前記変速制限制御を解除することで、前記基本変速制御による自動変速機18のアップシフトを許可する。これは、例えばコーナーを走行する際の減速から再加速に備えて変速制限制御を実行する場合、加速中に前後GFRがピークを打つことで初めて変速制限制御を実行する意義が終了するという観点からである。また、同様の観点から、本実施例の電子制御装置80は、前後GFRが正値であるときに、前後GFRが上昇から下降に転じたことを判定する。これにより、例えばブレーキ操作によって減速中に前後GFRのピークが発生したことで変速制限制御が解除されてしまうことが回避される。
【0032】
より具体的には、図4に戻り、開始条件成立判定部すなわち開始条件成立判定手段88は、前記前提条件が成立したか否かを判定する。また、開始条件成立判定手段88は、前記前提条件が成立したと判定した場合には、前記開始条件が成立したか否かを判定する。
【0033】
ナビ協調変速制御手段86は、開始条件成立判定手段88により前記開始条件が成立したと判定された場合には、変速制限制御を開始して、前記要求加速度マップから前記前提条件成立時から前記開始条件成立時までの最大合成Gに基づいて最大要求加速度を算出し、この最大要求加速度を出せる最ハイギヤ段を算出する。そして、ナビ協調変速制御手段86は、実質的にこの最ハイギヤ段へのダウンシフトを実行する指令を油圧制御回路100へ出力し、後述する終了条件成立判定手段90により終了条件が成立したと判定されるまでは、上記最ハイギヤ段よりも高車速側のギヤ段へのアップシフトを禁止する指令すなわち基本変速制御を実行しない指令を変速制御手段84へ出力する。
【0034】
終了条件成立判定部すなわち終了条件成立判定手段90は、ナビ協調変速制御手段86による前記変速制限制御の実行中に、その変速制限制御を終了する為の終了条件が成立したか否かを判定する。この終了条件は、例えば左右GRLがコーナーを抜けたことを見る為の所定値BRL以下であって、前記開始条件成立時からの前後GFR(正値)が最も大きくなったときすなわち前後GFRが上昇から下降に転じたときに成立する。
【0035】
本実施例では、前後GFRが上昇から下降に転じたことを以下の方法で判定する。例えば、終了条件成立判定手段90は、後述する図7に示すようなフローチャートにおいて所定の周期(サイクルタイム)毎に取得(検出)された前後GFRのある時点での(例えばn番目の)サンプリングデータGFR(n)が、このn番目のサンプリングデータGFRnの1サイクルタイム前のサンプリングデータGFR(n-1)を含む連続したmサイクルタイム前のサンプリングデータGFR(n-m)までのm個のサンプリングデータ[GFR(n-m)乃至GFR(n-1)]の内で前後GFRが最小値となるサンプリングデータよりも小さいとき(次式(2)参照)に、前後GFRが上昇から下降に転じたと判定する。
min[GFR(n-m)乃至GFR(n-1)]>GFRn ・・・(2)
【0036】
図6は、前後GFRが上昇から下降に転じたか否かを、n番目のサンプリングデータGFRnとこのn番目のサンプリングデータGFRnから5サイクルタイム前までの連続した5個のサンプリングデータ[GFR(n-5)乃至GFR(n-1)]とを用いて判定する場合を例示する図である。図6(a),(b)に示すように、黒丸で表した5個のサンプリングデータの内で前後GFRが最小値となるサンプリングデータMINの方が、二重丸で表したn番目のサンプリングデータGFRnの値以下であるときには、未だ前後GFRが上昇から下降に転じていないと判定される。一方で、図6(c)に示すように、二重丸で表したn番目のサンプリングデータGFRnが黒丸で表した5個のサンプリングデータの内で前後GFRが最小値となるサンプリングデータMINよりも小さいときには、前後GFRが上昇から下降に転じたと判定される。このように、本実施例における前後GFRが上昇から下降に転じたか否かの判定は、例えば前後GFRの傾きが正値から零乃至負値へ変化したことにより極大値が発生した時点を判定するものではなく、サンプリングデータの中に極大値があったことを判定するものである。従って、図6(d)に示すように、ノイズ等によって極大値MAXが一旦発生したとしても未だ前後GFRが上昇から下降に転じていないと判定されるので、誤判定が可及的に抑制される。
【0037】
ナビ協調変速制御手段86は、終了条件成立判定手段90により前記終了条件が成立したと判定された場合には、変速制限制御を終了(解除)して、上記最ハイギヤ段よりも高車速側のギヤ段へのアップシフト禁止を解除する指令すなわち基本変速制御へ復帰して変速マップに従って判断されるギヤ段へのアップシフトを許可する指令を変速制御手段84へ出力する。
【0038】
図7は、電子制御装置80の制御作動の要部すなわち変速制限制御によって制限された自動変速機18のギヤ段へのアップシフトに際してユーザに与える違和感を可及的に抑制する為の制御作動を説明するフローチャートであり、例えば数msec乃至数十msec程度の極めて短いサイクルタイムで繰り返し実行される。また、図8は、図7の制御作動に対応するタイムチャートである。
【0039】
図7において、先ず、開始条件成立判定手段88に対応するS10において、例えば前記前提条件(例えばレバーポジションPSHが「D」ポジションであって、前後GFR(負値)が前記所定値BFR(負値)以上且つ左右GRLが所定値ARL以下)が成立したか否かが判定される。このS10の判断が否定される場合は本ルーチンが終了させられるが肯定される場合(図8のt1時点)は同じく開始条件成立判定手段88に対応するS20において、例えば前記開始条件(例えば前後GFR(負値)が前記所定値AFR(負値)以上且つ左右GRLが前記所定値ARL以下であって、前記前提条件成立時からの前後GFR(負値)が最も大きくなった)が成立したか否かが判定される。このS20の判断が否定される場合は本ルーチンが終了させられるが肯定される場合(図8のt2時点)はナビ協調変速制御手段86に対応するS30において、前記変速制限制御が開始され、前記要求加速度マップから前記前提条件成立時から前記開始条件成立時までの最大合成Gに基づいて最大要求加速度が算出される。次いで、同じくナビ協調変速制御手段86に対応するS40において、上記S30にて算出された最大要求加速度を出せる最ハイギヤ段が算出される。次いで、終了条件成立判定手段90に対応するS50において、例えば前記終了条件(例えば左右GRLが所定値BRL以下であって、前記開始条件成立時からの前後GFR(正値)が最も大きくなったすなわち前後GFRが上昇から下降に転じた)が成立したか否かが判定される。当初はこのS50の判断が否定されるのでナビ協調変速制御手段86に対応するS60において、上記S40にて算出された最ハイギヤ段へのダウンシフトが実行され、その最ハイギヤ段よりも高車速側のギヤ段へのアップシフトが禁止される。一方、上記S50の判断が肯定される(図8のt3時点)と同じくナビ協調変速制御手段86に対応するS70において、前記変速制限制御が終了(解除)され、上記最ハイギヤ段よりも高車速側のギヤ段へのアップシフト禁止が解除されるすなわち変速マップに従って判断されるギヤ段へのアップシフトが許可される。尚、上記S50では、前後GFRが正値であるときに前後GFRが上昇から下降に転じたことが判定されるので、例えば図8の破線に示すようにブレーキ操作によって減速中に前後GFRのピークが発生したとしても、前後GFRが上昇から下降に転じたとは判定されない。
【0040】
上述のように、本実施例によれば、ナビ協調変速制御手段86による前記変速制限制御により自動変速機18のダウンシフトを実行した場合、前後GFRが上昇から下降に転じたときに、そのダウンシフトされたギヤ段からの自動変速機18のアップシフトが許可されるので、ユーザが求める加速感がピークを打って下がり始めているときにアップシフトによる加速感の減少を感じることになり、前記変速制限制御によって制限された自動変速機18の高車速側のギヤ段(ハイギヤ段)へのアップシフトに際してユーザに与える違和感を可及的に抑制することができる。つまり、自動変速機18の基本変速制御の実行を制限する変速制限制御の終了を適切に判断することができ、その変速制限制御の終了に伴って自動変速機18のアップシフトが実行された際にユーザに与える違和感を可及的に抑制することができる。
【0041】
また、本実施例によれば、前記変速制限制御を解除することで、前記基本変速制御による自動変速機18のアップシフトを許可するので、自動変速機18の基本変速制御への復帰が適切に判断され、その基本変速制御への復帰に伴って自動変速機18のアップシフトが実行された際にユーザに与える違和感を可及的に抑制することができる。
【0042】
また、本実施例によれば、所定の周期毎に取得された前後GFRのn番目のサンプリングデータGFR(n)が、そのn番目のサンプリングデータGFRnの1つ前を含む連続したm個前までのm個のサンプリングデータ[GFR(n-m)乃至GFR(n-1)]の内で前後GFRが最小値となるサンプリングデータよりも小さいときに、前後GFRが上昇から下降に転じたと判定するので、前後GFRが上昇から下降に転じたことが適切に判定される。例えば、前後GFRの変化の傾きが正値から負値へと変化したことで判定する場合と比較して、ノイズ等により誤判定してしまうことが抑制される。
【0043】
また、本実施例によれば、前後GFRが正値であるときに前後GFRが上昇から下降に転じたことを判定するので、減速中に前後GFRのピークが発生したことで前記変速制限制御が解除されてしまうことが回避される。つまり、例えば減速から再加速に備えて変速制限制御を実行する場合、加速中に前後GFRがピークを打つことで初めて変速制限制御を実行する意義が終了することに対して、加速時に前後GFRのピークが発生したときに変速制限制御が適切に解除される。
【0044】
以上、本発明の実施例を図面に基づいて詳細に説明したが、本発明はその他の態様においても適用される。
【0045】
例えば、前述の実施例では、ナビ協調変速制御手段86による変速制限制御を終了する為の終了条件の1つとして、前後GFRが上昇から下降に転じたか否かを判定したが、必ずしも前後GFRの変化で見る必要はない。例えば、前後GFRの変化に相当する他のパラメータである駆動力や駆動トルクなどの変化で見ても良い。このようにしても、本発明は適用され得る。
【0046】
また、前述の実施例では、前後GFRが上昇から下降に転じたか否かを、n番目のサンプリングデータGFR(n)がそれよりも連続したm個前までのサンプリングデータの内で最小値となるサンプリングデータよりも小さいか否かで判定したが、これに限らず、例えば前後GFRの傾きが正値から零乃至負値へ変化したか否かで判定しても良い。このようにしても、前記変速制限制御によって制限された自動変速機18の高車速側のギヤ段へのアップシフトに際してユーザに与える違和感を可及的に抑制することができるという、本発明の一定の効果は得られる。
【0047】
また、前述の実施例では、変速マップに従った自動変速機18の基本変速制御の実行を制限する変速制限制御として、ナビ協調変速制御手段86による道路コーナー情報に基づくギヤ段の選択を例示したが、必ずしもこれに限らない。例えば、登降坂路か否かの判定結果に基づいて自動変速機18の高車速側のギヤ段への変速を制限する登降坂変速制御などであっても、本発明は適用され得る。
【0048】
また、前述の実施例では、自動変速機18が前進6速、後進1速の変速が可能な自動変速機であったが、自動変速機のギヤ段数や内部構造は特に前述した自動変速機18に限定されるものではない。また、無段変速機や所謂DCT(Dual Clutch Transmission)などの自動変速機であっても本発明を適用することができる。尚、無段変速機の場合には、自動変速機18のギヤ段に相当するギヤ比が用いられ、前記変速制限制御が実行されるときには、高車速側のギヤ比(ハイギヤ比)の使用が制限される。
【0049】
また、前述の実施例では、流体伝動装置としてトルクコンバータ16が用いられていたが、トルク増幅作用のないフルードカップリングが用いられても良い。また、流体伝動装置は必ずしも備えられる必要はない。
【0050】
尚、上述したのはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【符号の説明】
【0051】
12:車両用動力伝達装置
14:エンジン(駆動力源)
18:自動変速機
32:駆動輪
80:電子制御装置(制御装置)
【特許請求の範囲】
【請求項1】
駆動力源からの動力を駆動輪側へ伝達する自動変速機を備え、該自動変速機を予め記憶された関係から車両状態に基づいて判断したギヤ段或いはギヤ比とする基本変速制御を実行する一方で、所定の条件が成立した場合には高車速側が制限された所定の上限ギヤ段或いはギヤ比を選択することにより該基本変速制御の実行を制限する変速制限制御を一時的に実行する車両用動力伝達装置の制御装置であって、
前記変速制限制御により前記自動変速機のダウンシフトを実行した場合、車両前後加速度或いは駆動力が上昇から下降に転じたときに、該ダウンシフトされたギヤ段或いはギヤ比からの該自動変速機のアップシフトを許可することを特徴とする車両用動力伝達装置の制御装置。
【請求項2】
前記変速制限制御を解除することで、前記基本変速制御による前記自動変速機のアップシフトを許可することを特徴とする請求項1に記載の車両用動力伝達装置の制御装置。
【請求項3】
所定の周期毎に取得された前記車両前後加速度或いは駆動力のn番目のサンプリングデータが、該n番目のサンプリングデータの1つ前のサンプリングデータを含む連続したm個前までの該m個のサンプリングデータの内の最小値となるサンプリングデータよりも小さいときに、該車両前後加速度或いは駆動力が上昇から下降に転じたと判定することを特徴とする請求項1又は2に記載の車両用動力伝達装置の制御装置。
【請求項4】
前記車両前後加速度或いは駆動力が正値であるときに、該車両前後加速度或いは駆動力が上昇から下降に転じたことを判定することを特徴とする請求項1乃至3の何れか1項に記載の車両用動力伝達装置の制御装置。
【請求項1】
駆動力源からの動力を駆動輪側へ伝達する自動変速機を備え、該自動変速機を予め記憶された関係から車両状態に基づいて判断したギヤ段或いはギヤ比とする基本変速制御を実行する一方で、所定の条件が成立した場合には高車速側が制限された所定の上限ギヤ段或いはギヤ比を選択することにより該基本変速制御の実行を制限する変速制限制御を一時的に実行する車両用動力伝達装置の制御装置であって、
前記変速制限制御により前記自動変速機のダウンシフトを実行した場合、車両前後加速度或いは駆動力が上昇から下降に転じたときに、該ダウンシフトされたギヤ段或いはギヤ比からの該自動変速機のアップシフトを許可することを特徴とする車両用動力伝達装置の制御装置。
【請求項2】
前記変速制限制御を解除することで、前記基本変速制御による前記自動変速機のアップシフトを許可することを特徴とする請求項1に記載の車両用動力伝達装置の制御装置。
【請求項3】
所定の周期毎に取得された前記車両前後加速度或いは駆動力のn番目のサンプリングデータが、該n番目のサンプリングデータの1つ前のサンプリングデータを含む連続したm個前までの該m個のサンプリングデータの内の最小値となるサンプリングデータよりも小さいときに、該車両前後加速度或いは駆動力が上昇から下降に転じたと判定することを特徴とする請求項1又は2に記載の車両用動力伝達装置の制御装置。
【請求項4】
前記車両前後加速度或いは駆動力が正値であるときに、該車両前後加速度或いは駆動力が上昇から下降に転じたことを判定することを特徴とする請求項1乃至3の何れか1項に記載の車両用動力伝達装置の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−197818(P2012−197818A)
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願番号】特願2011−60884(P2011−60884)
【出願日】平成23年3月18日(2011.3.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願日】平成23年3月18日(2011.3.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]