
車両用周囲監視装置
【課題】 簡易な構成で車両の周囲の危険物体を検出し、その危険の程度をユーザに伝えることのできる車両用周囲監視装置を提供する。
【解決手段】 車両の周辺を撮影する撮影手段と、撮影された画像から車両の周辺に存在する物体の位置を検出する第一の物体位置検出手段と、車両の位置を検出する車両位置検出手段と、車両の周辺に存在する物体の位置を検出する第二の物体位置検出手段と、第一の物体位置検出手段および第二の物体位置検出手段により検出された物体の位置、ならびに車両位置検出手段により検出された車両の位置に基づいて物体が車両に危険を及ぼす危険物体であるかを判定する危険物体判定手段と、判定された危険物体の位置を車両の位置とともに危険物体情報として記録する危険物体情報記録手段と、を有することを特徴とする車両用周囲監視装置として提供可能である。
【解決手段】 車両の周辺を撮影する撮影手段と、撮影された画像から車両の周辺に存在する物体の位置を検出する第一の物体位置検出手段と、車両の位置を検出する車両位置検出手段と、車両の周辺に存在する物体の位置を検出する第二の物体位置検出手段と、第一の物体位置検出手段および第二の物体位置検出手段により検出された物体の位置、ならびに車両位置検出手段により検出された車両の位置に基づいて物体が車両に危険を及ぼす危険物体であるかを判定する危険物体判定手段と、判定された危険物体の位置を車両の位置とともに危険物体情報として記録する危険物体情報記録手段と、を有することを特徴とする車両用周囲監視装置として提供可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両に搭載される車載カメラやセンサ等を用いて自車両の周囲を監視する車両用監視装置に関するものである。
【背景技術】
【0002】
車載カメラを用いて、運転者にとって死角となる部分を撮影して、車内のディスプレイに表示する車載カメラ装置が知られている。この車載カメラ装置によれば、運転者は、ディスプレイに表示された映像を参照しながら、車両を所望の方向へ動かすことができる。
【0003】
例えば、自動車などの車両の後部に、ビデオカメラを取付けて、そのビデオカメラが撮影した映像を、車内の所定位置に配置されたモニタに表示させるようにした、いわゆるバックモニタと称されるものが実用化されている。このバックモニタは、主として車両を後退させる際に、運転席から死角となる後方がモニタで確認できるようにして、バック時の安全性を向上させるために使用される。この場合のモニタとしては、いわゆるカーナビゲーション装置として、走行中の現在位置近傍の道路地図などを表示させるためのモニタが使用されることが多い。また、バックモニタ専用の表示装置が運転席の近傍に配置される場合もある。
【0004】
また、撮影画像に基づいて検出される複数のエッジのうち、非立体障害物のエッジを除外して立体障害物のエッジを抽出し、抽出された立体障害物のエッジと車両との位置関係に基づいて立体障害物と車両との接触の可能性を乗員に報知するので、車両周囲に歩行者や対向車が存在する場合でも、運転者は安心して路肩に幅寄せをすることができる車両用周囲監視装置が考案されている(特許文献1参照)。
【0005】
また、車両の後方を撮影する少なくとも1つの後方撮影用ビデオカメラと、車両の後方を運転者が監視するインサイドミラーと、このインサイドミラーの近傍に取付けられてビデオカメラが撮影した映像が鏡像として表示される表示装置とで構成され、運転者はインサイドミラーを見るときに、このインサイドミラーの近傍に取付けられた表示装置に表示される後方の映像を見ることができる車両用監視装置が考案されている(特許文献2参照)。
【0006】
【特許文献1】特開2004−302609号公報
【特許文献2】特開2002−225629号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
特許文献1の例では、道路と平行なエッジを検出する手段と非立体障害物のエッジを除外して立体障害物のエッジを抽出する抽出手段が必要でシステムが複雑になり、装置のコスト上昇要因となる。また、側溝のような道路に対して突起していない立体障害物に対しては接触しないと判定されてしまう。また、障害物に対する危険性の程度は報知されず、立体障害物が複数ある場合の報知方法についても言及されていない。
【0008】
特許文献2の例では、後方の広い範囲の監視が可能になるが、本当に注意すべき地点を表示しないため、ユーザはかえって、表示を見ることに注意がいき、運転の障害となることが予想される危険物体を見逃すこともあり得る。
【0009】
上記問題を背景として、本発明の課題は、簡易な構成で車両の周囲の危険物体を検出し、その危険の程度をユーザに伝えることのできる車両用周囲監視装置を提供することにある。
【課題を解決するための手段および発明の効果】
【0010】
本発明は、上記課題を解決するための車両用周囲監視装置を提供するものである。即ち、請求項1によれば、車両の周辺を撮影する撮影手段と、撮影された画像から車両の周辺に存在する物体の位置を検出する第一の物体位置検出手段と、車両の位置を検出する車両位置検出手段と、第一の物体位置検出手段により検出された物体の位置および車両位置検出手段により検出された車両の位置に基づいて、物体が車両に危険を及ぼす危険物体であるかを判定する危険物体判定手段と、判定された危険物体の位置を車両の位置とともに危険物体情報として記録する危険物体情報記録手段と、を有することを特徴とする車両用周囲監視装置として構成される。
【0011】
上記構成によって、例えばCCDカメラ等の撮影手段で車両の周囲を撮影し、その撮影された画像に含まれる物体を車両の現在位置に基づいて危険物体であるかを判定することができる。また、従来技術のように立体障害物のエッジを抽出する必要もないので、低コストかつ簡易な構成で本発明の車両用周囲監視装置を実現することが可能となる。また、側溝のような道路に対して突起していない立体障害物も検出可能である。
【0012】
また、請求項2によれば、上記課題を解決するための車両用周囲監視装置は、車両の周辺に存在する物体の位置を検出する第二の物体位置検出手段と、車両の位置を検出する車両位置検出手段と、第二の物体位置検出手段により検出された物体の位置および車両位置検出手段により検出された車両の位置に基づいて、物体が車両に危険を及ぼす危険物体であるかを判定する危険物体判定手段と、判定された危険物体の位置を車両の位置とともに危険物体情報として記録する危険物体情報記録手段と、を有することを特徴とする車両用周囲監視装置として構成される。
【0013】
上記構成によって、例えば電磁波あるいは超音波等で車両の周囲をセンシングし、その反射波の状態により検出された物体を車両の現在位置に基づいて危険物体であるかを判定することができる。また、従来技術のように立体障害物のエッジを抽出する必要もないので、低コストかつ簡易な構成で本発明の車両用周囲監視装置を実現することが可能となる。また、側溝のような道路に対して突起していない立体障害物も検出可能である。
【0014】
また、請求項3によれば、上記課題を解決するための車両用周囲監視装置は、車両の周辺を撮影する撮影手段と、撮影された画像から車両の周辺に存在する物体の位置を検出する第一の物体位置検出手段と、車両の位置を検出する車両位置検出手段と、車両の周辺に存在する物体の位置を検出する第二の物体位置検出手段と、第一の物体位置検出手段および第二の物体位置検出手段により検出された物体の位置、ならびに車両位置検出手段により検出された車両の位置に基づいて物体が車両に危険を及ぼす危険物体であるかを判定する危険物体判定手段と、判定された危険物体の位置を車両の位置とともに危険物体情報として記録する危険物体情報記録手段と、を有することを特徴とする車両用周囲監視装置として構成される。
【0015】
上記構成によって、例えばCCDカメラ等の撮影手段で車両の周囲を撮影し、その撮影された画像に含まれる物体、および例えば電磁波あるいは超音波等で車両の周囲をセンシングし、その反射波の状態により検出された物体を車両の現在位置に基づいて危険物体であるかを判定することができる。二つの方法で危険物体であるかどうかを判定するので、判定の精度がさらに向上する。また、従来技術のように立体障害物のエッジを抽出する必要もないので、低コストかつ簡易な構成で本発明の車両用周囲監視装置を実現することが可能となる。また、側溝のような道路に対して突起していない立体障害物も検出可能である。
【0016】
請求項4によれば、本発明の車両用周囲監視装置は、物体の大きさを測定する測定手段を有し、危険物体判定手段は危険物体であるかどうかを測定された物体の大きさを考慮して判定する構成をとることができる。
【0017】
一般的に大きな物体ほど危険物体である可能性が大きい。また、物体の大きさは撮影された画像あるいは物体からの反射波の状態により測定できる。上記構成によって、新たな測定手段を設けずに低コストで危険物体であるかどうかを判定することが可能となる。
【0018】
請求項5によれば、本発明の車両用周囲監視装置は、車両と物体との距離を測定する距離測定手段を有し、危険物体判定手段は危険物体であるかどうかを測定された距離を考慮して判定する構成をとることができる。
【0019】
一般的に車両の近くに存在する物体ほど危険物体である可能性が大きい。また、車両と物体との距離は撮影された画像あるいは物体からの反射波の状態により測定できる。上記構成によって、新たな距離測定手段を設けずに低コストで危険物体であるかどうかを判定することが可能となる。
【0020】
請求項6によれば、本発明の車両用周囲監視装置は、物体の形状を測定する形状測定手段を有し、危険物体判定手段は危険物体であるかどうかを測定された物体の形状を考慮して判定する構成をとることができる。
【0021】
一般的に角があったり鋭角形状を有する物体ほど危険物体である可能性が大きい。また、物体の形状は撮影された画像あるいは物体からの反射波の状態により測定できる。上記構成によって、新たな形状測定手段を設けずに低コストで危険物体であるかどうかを判定することが可能となる。
【0022】
請求項7によれば、本発明の車両用周囲監視装置における危険物体情報には、危険物体の大きさ、高さ、重心位置、および車両との相対位置のうち少なくとも一つ以上が含まれる構成をとることができる。
【0023】
上記構成によって、大容量の記憶媒体を要することなく危険物体情報を効率よく記録することが可能となる。
【0024】
請求項8によれば、本発明の車両用周囲監視装置は、電子地図データを記憶する地図データ記憶手段を有し、危険物体情報記録手段には危険物体情報とともに車両の位置を含む所定の範囲の周辺地図データが記憶される構成をとることができる。
【0025】
上記構成によって、危険物体の位置だけではなく周辺の状況も把握することが可能となる。特に危険物体情報を表示する場合には、危険物体情報を表示してから周辺の地図を参照するという手間をかけないため、その位置関係を視覚的に短時間で把握することが可能となる。
【0026】
請求項9によれば、本発明の車両用周囲監視装置における危険物体情報記録手段は、危険物体が検出された車両の位置に対応した危険物体情報が既に記録されている場合、その危険物体情報と比較して比較結果が一致しない場合はその内容を更新する構成をとることができる。
【0027】
上記構成によって、常に最新の危険物体情報を少ない記憶領域で効率よく記録することが可能となる。
【0028】
請求項10によれば、本発明の車両用周囲監視装置は、危険物体情報記録手段に、検出された車両の位置に対応した危険物体情報が記録されているかどうかを検索する危険物体情報検索手段を有する構成をとることができる。
【0029】
上記構成によって、単に記録するだけではなく危険物体情報記録手段に記録されている危険物体情報を効率よく活用することが可能となる。
【0030】
請求項11によれば、本発明の車両用周囲監視装置は、撮影された画像上に当該危険物体を識別可能な表示意匠で重畳して表示する構成をとることができる。
【0031】
上記構成によって、車両が走行中に適切なタイミングで危険物体情報を表示して、ユーザに注意を促すことが可能となる。
【0032】
請求項12によれば、本発明の車両用周囲監視装置における表示手段は、危険物体の形状を撮影手段の撮影範囲に適応するように変形して表示可能であり、変形された危険物体を撮影手段により撮影された画像に重畳して表示する構成をとることができる。
【0033】
上記構成によって、撮影手段の撮影範囲すなわち車両の向きによって危険物体の形状を正確に表示することが可能となり、ユーザは危険物体に対して適切な対応をとることができる。
【0034】
請求項13によれば、本発明の車両用周囲監視装置における表示手段は、検索された危険物体が複数ある場合、危険物体毎に表示意匠を変えて表示する構成をとることができる。
【0035】
上記構成によって、ユーザは複数の危険物体があることを視覚的に素早く認識可能となる。
【0036】
請求項14によれば、本発明の車両用周囲監視装置における表示手段は、検索された危険物体が複数ある場合、危険物体毎に表示タイミングを変えて表示する構成をとることができる。
【0037】
上記構成によって、例えば車両との距離の近い順、危険度の高い順のような、ユーザが対応しなければならない優先度の高い順に表示すれば、ユーザはどの危険物体から対応すればよいか戸惑うことはなくなる。
【0038】
請求項15によれば、本発明の車両用周囲監視装置における表示手段は、危険物体の形状に応じて表示意匠を変えて表示する構成をとることができる。
【0039】
例えば縁石のような道路に対して凸状の危険物体と側溝のような道路に対して凹状の危険物体の表示意匠を変えて表示すれば、ユーザはどんな処置を取ればよいか予め決めることができ、余裕を持って対処することが可能となる。
【0040】
請求項16によれば、本発明の車両用周囲監視装置は、車両と危険物体との距離を測定する危険物体距離測定手段を有し、表示手段は、測定された距離に応じて危険物体の表示意匠を変えて表示する構成をとることができる。
【0041】
上記構成によって、ユーザは車両に近い危険物体から順次対応していけばよく、対応順序を間違えることはなくなる。
【0042】
請求項17によれば、本発明の車両用周囲監視装置は、危険物体情報を車両外部の外部機器に送信する送信手段を有する構成をとることができる。
【0043】
上記構成によって、ユーザの持つ危険物体情報を外部機器を介して他のユーザに提供することが可能となる。
【0044】
請求項18によれば、本発明の車両用周囲監視装置は、危険物体情報を車両外部の外部機器から取得する取得手段を有する構成をとることができる。
【0045】
上記構成によって、ユーザの走行したことのない地域の危険物体情報を取得することが可能となり、初めて走行する地域でも事前に取得した危険物体情報を基に予め危険物体への対応策や運転計画を考えておくことができる。
【0046】
請求項19によれば、本発明の車両用周囲監視装置における外部機器は、情報管理センタが所有するセンタサーバ、ユーザが所有するホームサーバ、あるいはWEBサーバである構成をとることができる。
【0047】
一般的にサーバはデータバックアップ体制も充実していて信頼性が高く、ウィルス対策,不正アクセス対策も充実していて安全性も高い。上記構成によって、危険物体情報を複数のユーザで安全な環境下で共有することが可能となる。
【0048】
請求項20によれば、本発明の車両用周囲監視装置は、目的地までの経路を計算する経路計算手段と、車両の現在位置が危険物体の所定の距離内に接近したかを判定する接近判定手段とを有し、危険物体検索手段は、経路の計算時に、目的地までの経路周辺の危険物体情報が記録されているかどうかを検索し、車両の位置が検索された危険物体の所定の距離内に接近した場合に、表示手段は当該危険物体情報を表示する構成をとることができる。
【0049】
通常の経路案内では経路周辺の施設情報程度しか提供されなかったが、上記構成によって、事前に危険物体情報が表示されるため、ユーザは余裕を持って該危険物体に対応することが可能となる。
【0050】
請求項21によれば、本発明の車両用周囲監視装置は、車両の位置が検索された危険物体の所定の距離内に接近した場合、第一の物体位置検出手段により検出された物体、または第二の物体位置検出手段により検出された物体の状況が当該危険物体情報の内容と異なる場合、危険物体情報記録手段は、第一の物体位置検出手段により検出された物体、または第二の物体位置検出手段により検出された物体の状況に基づいて当該危険物体情報を更新する構成をとることができる。
【0051】
上記構成によって、道路及び周辺の状況が以前走行したときから変化して、危険物体の状況に変化が生じても、危険物体情報記録手段には常に最新の危険物体情報が記録される。そして、ユーザは最新かつ正確な危険物体情報に基づいて車両を走行させることが可能となる。
【発明を実施するための最良の形態】
【0052】
簡易な構成で車両の周囲の危険物体を検出し、その危険の程度をユーザに伝えることのできる車両用周囲監視装置を提供するという目的を、カメラおよびセンサにより検出された物体の位置、ならびに車両の位置に基づいて物体が車両に危険を及ぼす危険物体であるかを判定し、その結果を記録する構成により実現した。
【実施例】
【0053】
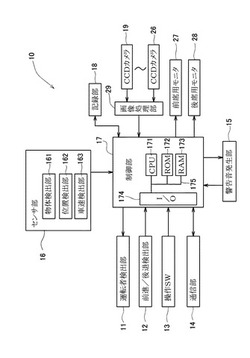
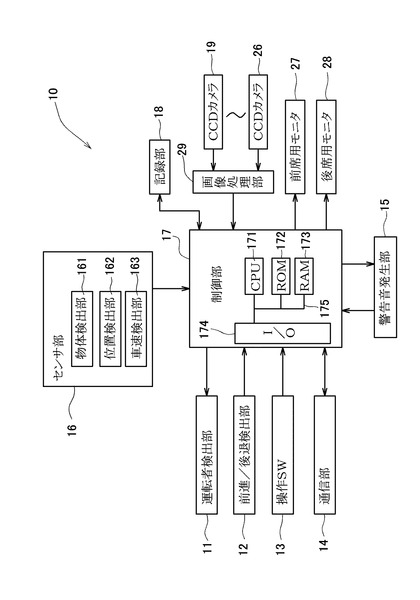
以下、本発明の実施の形態を、図面に示す実施例を参照しながら説明する。図1に本発明の車両用周囲監視装置の全体構成を示す。車両用周囲監視装置10は、制御部17と、その制御部17に接続される、運転者検出部11,前進/後退検出部12,操作SW(スイッチ)13,通信部14,警告音発生部15,センサ部16,記録部18,画像処理部29,CCDカメラ19〜26,前席用モニタ27,後席用モニタ28を含んで構成されている。
【0054】
運転者検出部11は、運転席の着座部や背もたれ部に設けられたスイッチあるいは重量センサ等により運転者が着席しているかどうかを検出するものである。運転席およびその周辺部を検出範囲とする赤外センサ、あるいは運転席およびその周辺部を撮影範囲とするCCDカメラを用いて運転者の着席を検出してもよい。
【0055】
前進/後退検出部12は、車両1(図2参照)の前進/後退の状態を検出するもので、例えば、車両1のシフトレバーの位置を検出して、その位置に応じた信号を発生するシフトポジションセンサを用いる。
【0056】
操作SW13は、例えば前席用モニタ27あるいは後席用モニタ28と一体になったタッチパネルもしくはメカニカルなスイッチが用いられる。タッチパネルは、前席用モニタ27あるいは後席用モニタ28の画面上にガラス基盤と透明なフィルムにスペーサと呼ばれる隙間を介してX軸方向、Y軸方向に電気回路が配線され、フィルム上をユーザがタッチすると、押された部分の配線がショートして電圧値が変わるため、これを2次元座標値(X,Y)として検出する、いわゆる抵抗膜方式が広く用いられる。その他に、透明な導電性基盤のガラス面に電気信号を受ける物質を塗布し、指をガラス面に近づけると静電容量の変化を電気信号としてセンサで検知する、いわゆる静電容量方式を用いてもよい。
【0057】
メカニカルスイッチ,タッチパネルの他に、操作SW13としてマウスやカーソル等のポインティングデバイスを用いてもよい。また、図示しないマイクおよび音声認識ユニットを用いて種々の指示を入力することも可能である。これは、マイクから入力された音声信号を、音声認識ユニットにおいて周知の隠れマルコフモデル等の音声認識アルゴリズムにより音声を識別する音声認識技術により処理を行ない、その結果に応じた操作コマンドに変換するものである。さらに、リモコン端末を用いる構成としてもよい。
【0058】
本発明の送信手段,取得手段である通信部14は公衆回線あるいはインターネットを介して外部機器との通信を行なうもので、周知の無線あるいは有線による送信回路および受信回路を含んで構成される。
【0059】
本発明の危険物体判定手段,危険物体情報検索手段,危険物体距離測定手段,経路計算手段,接近判定手段である制御部17は通常のコンピュータとして構成されており、周知のCPU171,ROM172,RAM173,入出力回路であるI/O174およびこれらの構成を接続するバスライン175が備えられている。CPU171は、ROM172に記憶された制御プログラムおよびデータにより制御を行なう。
【0060】
警告音発生部15は、周知の音声合成回路およびスピーカを含んで構成され、ROM172に記憶される制御プログラムの指令によって記録部18あるいはROM172に記憶されるデジタル音声データを音声合成回路においてアナログ音声に変換したものが送出される。なお、音声合成の方法には、音声波形をそのままあるいは符号化して蓄積しておき、必要に応じて繋ぎあわせる録音編集方式などがある。また、警告音発生部15として周知のオーディオ装置を接続し、制御部17からデジタル音声データあるいは発声指令をオーディオ装置へ送り、オーディオ装置が該デジタル音声データあるいは発声指令に基づいて警告音を送出するようにしてもよい。
【0061】
センサ部16は、車両1の周囲の物体を検出する物体検出部161,車両1の現在位置を検出する位置検出部162,車両1の速度を検出する車速検出部163を含んで構成される。
【0062】
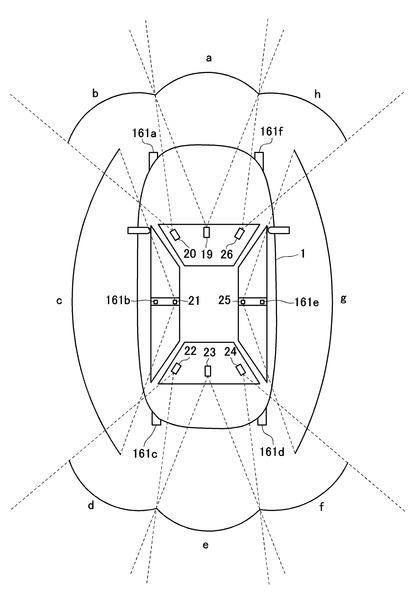
本発明の第二の物体位置検出手段,測定手段,距離測定手段,形状測定手段である物体検出部161は、非接触で物体の位置を検出するもので、超音波センサやマイクロ波レーダ等が用いられる。物体検出部161は、参照信号を外部に出力し、その参照信号が反射して戻ってくるまでの時間によりどの方向にどのような物体があるかを検出する。参照信号のスキャン方式により、物体までの距離や物体の大きさを検出することができる。図2のように、車両1には超音波センサ161a(左前方:バンパー),161b(左側方:センターピラー),161c(左後方:バンパー),161d(右後方:バンパー),161e(右側方:センターピラー),161f(右前方:バンパー)が取り付けられている。
【0063】
本発明の車両位置検出手段である位置検出部162は、衛星からの電波に基づいて車両1の位置を検出するGPS(Global Positioning System:全地球測位システム)受信機が用いられる。精度を上げるには外部との通信を行なって位置補正を行ない正確な車両位置を計測できるD−GPS(Differential-GPS:差分補正・全地球測位システム)や、RTK−GPS(Real Time Kinematic GPS)が用いられる。
【0064】
位置検出部162は、GPS受信機の他に、周知の地磁気センサ,ジャイロスコープ,距離センサを用いてもよい。これらのセンサは各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお、精度によっては前述したうちの一部のセンサで構成してもよく、さらに、ステアリングの回転センサや各転動輪の車輪センサを用いてもよい。
【0065】
車速検出部163は、周知のロータリエンコーダ等の回転検出部を含み、例えば車輪取り付け部付近に設置されて車輪の回転を検出してパルス信号として制御部17に送るものである。制御部17では、その車輪の回転数を車両1の速度に換算して、車両1の現在位置から所定の場所までの予想到達時間を算出したり、車両1の走行区間毎の平均車速を算出することができる。
【0066】
本発明の危険物体情報記録手段,地図データ記憶手段である記録部18は、EEPROM(Electrically Erasable & Programmable Read Only Memory:電気的消去・プログラム可能・読出し専用メモリ)やフラッシュメモリ等の書き換え可能な半導体メモリ、あるいはハードディスク装置等によって構成され、車両用周囲監視装置10の動作に必要な情報およびデータが記録されている。また、車両用周囲監視装置10の電源がオフ状態になっても、記録内容は保持される。
【0067】
本発明の表示手段である前席用モニタ27,後席用モニタ28は周知のカラー液晶表示器で構成され、ドット・マトリックスLCD(Liquid Crystal Display)およびLCD表示制御を行なうための図示しないドライバ回路を含んで構成されている。ドライバ回路は、例えば、画素毎にトランジスタを付けて目的の画素を確実に点灯させたり消したりすることができるアクティブマトリックス駆動方式が用いられ、制御部17から送られる表示指令および表示画面データに基づいて表示を行なう。また、表示器として有機EL(ElectroLuminescence:電界発光)表示器,プラズマ表示器を用いてもよい。
【0068】
なお、前席用モニタ27は、車両1のインストルメントパネルの中央部に取り付けられる。また、後席用モニタ28は運転席の背もたれと助手席の背もたれの間,運転席あるいは助手席の背もたれ,あるいは天井部に取り付けられる。
【0069】
本発明の撮影手段であるCCDカメラ19〜26は周知のもので、図2のようにCCDカメラ19から順に車両1の前方(CCDカメラ19),左前方(CCDカメラ20),左側方(CCDカメラ21),左後方(CCDカメラ22),後方(CCDカメラ23),右後方(CCDカメラ24),右側方(CCDカメラ25),右前方(CCDカメラ26)を撮影し、撮影範囲は、それぞれ、a(CCDカメラ19),b(CCDカメラ20),c(CCDカメラ21),d(CCDカメラ22),e(CCDカメラ23),f(CCDカメラ24),g(CCDカメラ25),h(CCDカメラ26)となっている。
【0070】
本発明の第一の物体位置検出手段,測定手段,距離測定手段,形状測定手段である画像処理部29は、公知のパターン認識などの技術によって、CCDカメラ19〜26によって撮影された画像の解析を行なうための画像処理回路を含んで構成される。
【0071】
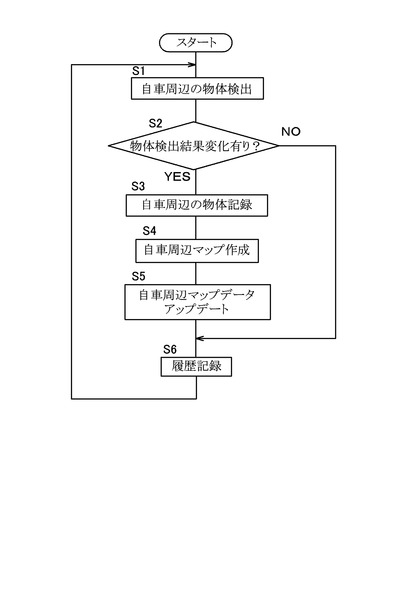
図3のフロー図を用いて、周辺マップ作成処理について説明する。なお、本処理はROM172の制御プログラムに含まれ他の処理とともに繰り返し実行される。また、本処理を運転者検出部11により運転者の着座を検出した場合にのみ実行するようにしてもよい。まず、超音波センサ161a〜161fおよびCCDカメラ19〜26により、車両1の周囲に物体があるかを検出する(S1)。
【0072】
画像処理部29あるいは記録部18には、検出の基準となる物体の基準データが記憶されている。撮影した画像とその基準データを順次比較して、撮影した画像に含まれている内容と物体の基準データとの一致割合が所定の値を超えると、撮影した画像にその物体が含まれていることを検出できる。
【0073】
物体が検出された場合には、超音波センサ161a〜161fの反射波の受信状態あるいはCCDカメラ19〜26による撮影画像から画像処理を行なって求めることができる物体の大きさ(幅、奥行き、高さ、輪郭等)により、検出された物体が車両1に危険を及ぼす物体であるかを判定する。すなわち、車両1の位置に対して、車体に接触する高さを持つ物体(縁石、置石、分離帯、街路樹、標識、看板)、道路上の凹み(側溝、ぬかるみ、穴)を検出し、その物体の車両1に対する危険度を判定する。
【0074】
危険度は以下の判定基準の少なくとも一つを用いて判定する。
(1)物体の位置:物体の位置が走行車線上の中央部に近いほど危険度が大きい。
(2)物体の高さ:物体の高さが車両1の最低地上高よりも高い位置にあるほど危険度が大きい。また、枝のように上から垂れ下がるような物体の場合は車両1の最大地上高よりも低い位置にあるほど危険度が大きい。
(3)物体の硬度:電柱や標識のように硬度が高いほど危険度が大きい。
(4)物体の大きさ:物体が大きいほど危険度が大きい。
(5)凹みの規模(大きさ,深さ):凹みの規模が大きいほど危険度が大きい。
(6)車両1との位置関係:車両1との距離が近いほど、あるいは車両1の進路上に近い位置にあるほど危険度が大きい。
【0075】
危険と判定された物体は、その位置情報(大きさ、高さ、相対位置(センサからの位置)、重心位置:緯度経度)を車両位置情報とともに記録する。この重心位置は車両1の緯度、経度、高さの測定値を用いて以下のように計算する。
【0076】
例えばRTK−GPSで測定した位置を車両1の重心位置の緯度、経度、高さとして設定し、車幅、車長、車高をオフセット値(図5参照)として車両1の存在範囲を設定する。また超音波センサ161a〜161fの取り付け位置を予め入力しておき、超音波センサによる物体との距離計測値を計算して、危険と判定された物体の位置が計算できる。以下に、図11を用いた具体例を示す。
【0077】
RTK−GPS測定位置を、緯度座標を北緯NN,東経EE、高さをXXmとする。NN,EEは秒単位で、1秒は約22m、よって1/1000秒単位で2.2cmになる。また、測定誤差は数cmである。車両1の方向を北方向を0度にとり時計回りに角度が増加すると仮定する。車両1の代表点0を(0,0)、超音波センサ位置座標を(Xs,Ys)、超音波センサから測定した物体Zの位置を(r,θ)とする。角度は車両1が北向きのときの真後ろ方向が0度、右回転方向を+にとる。超音波センサが車両1の後方の2つのコーナー(図2では161c,161d)に設置されるとすると、Xs=Wr(Wr:幅方向のオフセット値)Ys=−Lr(後方の向きをマイナスにとる)となる。物体Zの位置をX,Y座標系で表すと、物体Zの位置(X,Y)は、車両1が真北を向いていると(Wr−rsinθ,−Lr−rcosθ)となる。また、車両1が真北から角度Φの方向にある場合、物体Zの座標(X',Y')は、(XcosΦ+YsinΦ,−XsinΦ+YcosΦ)となる。この値を緯度経度に変換し、RTK−GPSによる測定値との演算を行なえば、物体境界の絶対位置座標を算出できる。
【0078】
車両1の周囲に物体が検出された場合(S2:YES)、算出された絶対位置座標を危険度とともに記録部18の所定の領域に記録する(S3)。
【0079】
記録部18の地図データ記録領域に記録されている地図データから、車両1の現在位置を基準とした所定の範囲のデータを読み出し、物体の位置を記録して周辺マップを作成する(S4)。このとき、物体の大きさ(幅、奥行き、高さ、輪郭等)も合わせて記録する。
【0080】
そして、記録部18の周辺マップ記録領域あるいは履歴記録領域を参照して、以前に車両1の現在位置に関する周辺マップを作成して記録していないかを調べ、作成・記録を行なっていない場合には、上記で作成したものを周辺マップ記録領域に記録する。一方、以前に作成・記録を行なっている場合には、既に記録されている内容と今回作成された周辺マップの内容を比較し、内容に相違があれば今回作成された内容を追記した上で周辺マップ記録領域に記録して、周辺マップをアップデートし(S5)、その履歴を記録部18の履歴記録領域に記録する(S6)。
【0081】
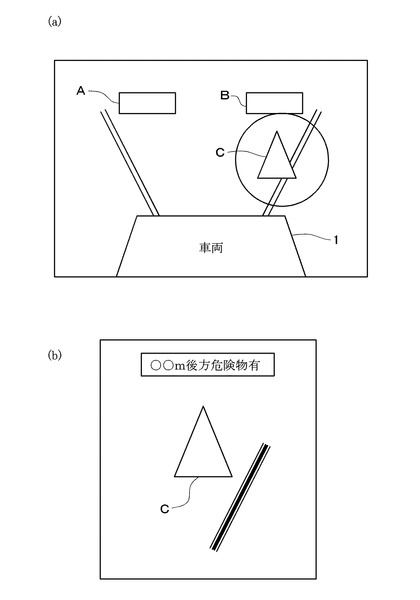
図4および図5に、前席用モニタ27あるいは後席用モニタ28での表示例を示す。図4のように車両1が後退車庫入れを行なう場合、前進/後退検出部12で車両1の後退を検出して、CCDカメラ22〜24を作動させ、その画像を例えば前席用モニタ27に表示する。また、超音波センサ161c、161dも作動させる。なお、必要に応じてCCDカメラ21,25、超音波センサ161b、161eも作動させてもよい。図4(a)の例では車両1と縁石Bとの間に物体Cが存在する。CCDカメラ22〜24による撮影画像と超音波センサ161c、161dの反射波の受信状態から物体Cの位置および形状が判定され、次いで物体Cの危険度が求められ物体Cが車両1に接触する等の車両1の車庫入れの妨げになると判定された場合、図4(b)のように、前席用モニタ27で拡大表示が行なわれ、危険度に応じてメッセージも付加される。また、警告音発生部15から警告音あるいは警告メッセージが発せられる。
【0082】
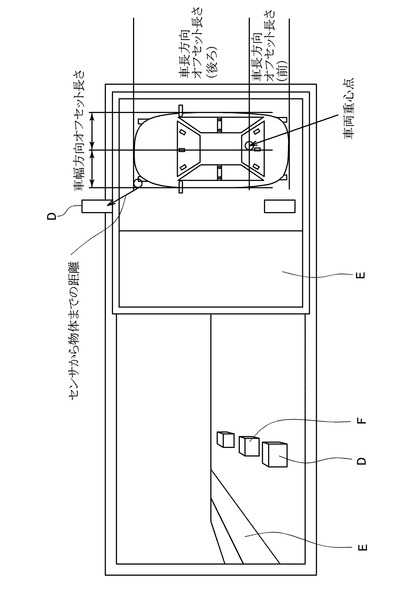
図5の例は、車両1を道路左側に寄せて駐車する際の前席用モニタ27の表示例である。車両1は前進しているので、CCDカメラ19,20,26と超音波センサ161a,161fが作動している。なお、必要に応じてCCDカメラ21,25、超音波センサ161b、161eも作動させてもよい。側溝Eは凹状の物体として、縁石D,Fは凸状の物体として検出される。記録部18に、例えば「道路脇にある直方体の物体:縁石」のように、物体の形状と名称を関連付けて記録しておいて、各モニタに表示してもよい。側溝は、「道路脇にあり道路に沿って連続する凹状の物体」となる。図5で、「道路脇にあり道路に沿って連続する凹状の物体」Eを検出し、これを側溝と判定した場合には、その部分を水が流れるような表示としてもよい。
【0083】
また、図5の右側の表示のように、車両1を上方から見た各物体との位置関係を合わせて表示してもよい。無論、操作SW13の操作で切り換え表示できるようにしてもよい。
【0084】
図10のように、記録部18に記録されている周辺マップデータは、通信部14を介してユーザの自宅にあるホームサーバ5,データセンタ等にあるセンタサーバ4、あるいはインターネット上の図示しないWEBサーバと送受信可能としてもよい。例えば、図3の例では、周辺マップデータがアップデートされた場合に、アップデートされた内容が自動あるいは操作SW13の操作によりホームサーバ5あるいはセンタサーバ4に送られる。また、他のユーザの車両3はホームサーバ5あるいはセンタサーバ4に記録されている周辺マップデータをダウンロード可能である。
【0085】
図12を用いてセンタサーバ4の構成を説明する。なお、ホームサーバ5あるいは図示しないWEBサーバもセンタサーバ4と同様の構成である。センタサーバ4は、CPU51,ROM52,RAM53および入出力インターフェース(I/O)54を有し、これらがバスライン55により送受信可能に接続されたコンピュータ本体50を備え、これに周辺機器として、キーボード56あるいはマウス57等の入力装置,CD−ROMドライブ58あるいはFDD59等の記録媒体読取装置,HDD(ハードディスクドライブ)60,モニタ制御部61を介して接続されるモニタ62,プリンタ63、および外部ネットワークにつながる送受信装置66等との通信を行なうネットワーク制御部64等が接続されたコンピュータシステムとして全体が構築されている。
【0086】
HDD60には、オペレーティングシステムプログラム(以下、OSという)60a及びサーバプログラム60bが格納されている。サーバプログラム60bは、サーバとしての機能を実現するため、OS60a上でRAM53に確保されるサーバワークメモリ53bを作業領域とする形で作動するものである。これは、例えばCD−ROM65等にコンピュータで読み取り可能な状態で記憶され、HDD60上の所定の記憶領域にインストールされるものである。外部ネットワークからサーバプログラム60bあるいはデータをダウンロードする構成を用いてもよい。また、RAM53には、OS60aのワークメモリ53aも形成される。
【0087】
また、HDD60には、周辺マップデータベース60cが構築されている。周辺マップデータベース60cは車両用周囲監視装置10等からネットワークを経由して送られるデータ、キーボード56あるいはマウス57等の入力装置によるデータ入力、あるいは記録媒体からのデータ入力により随時更新され、常に最新の状態となっている。
【0088】
また、HDD60には、ユーザ登録情報60dが記録されている。ユーザ登録情報60dには、ユーザIDやパスワード,車両用周囲監視装置10等の車載端末を識別するための情報である端末IDが登録されており、どのユーザがどの車載端末によってセンタサーバ4に接続を可能とするか登録をしておく。
【0089】
車両用周囲監視装置10で周辺マップのアップデートが発生した場合、自動あるいは操作SW13の操作により通信部14,外部ネットワークを介してセンタサーバ4(あるいはホームサーバ5,WEBサーバ)に接続する。接続が確立したら記録部18に記録されているユーザID,パスワード,端末IDをセンタサーバ4に送り、センタサーバ4でユーザ登録情報60dとの照合を行なう。照合の結果、正規ユーザと判定されたら、その旨が車両用周囲監視装置10に伝えられ、車両用周囲監視装置10からセンタサーバ4にアップデート内容が送られる。センタサーバ4ではアップデート内容と周辺マップデータベース60cとを比較して内容に相違があればその差分を取り込んで記録する。
【0090】
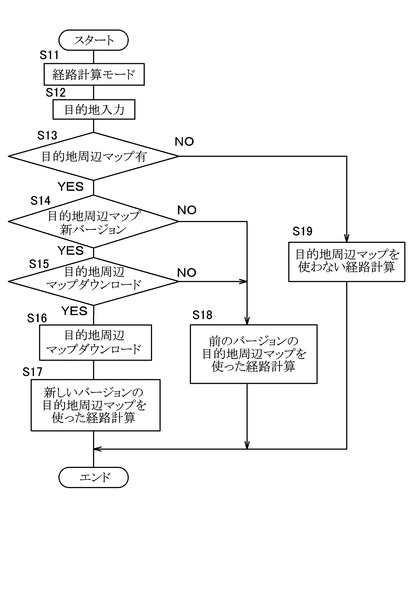
また、センタサーバ4等から車両用周囲監視装置10に周辺マップのデータを送ることも可能である。以下、この処理について車両用周囲監視装置10で経路計算を行なう場合を例に挙げて図6のフロー図を例に説明する。なお、本処理はROM172の制御プログラムに含まれ他の処理とともに繰り返し実行される。まず、操作SW13の操作により経路計算モードに移行し(S11)、目的地を入力する(S12)。
【0091】
次いで、記録部18の記録領域を参照し、入力された目的地を含む周辺マップが記録されているかを調べる。目的地を含む周辺マップが記録されていない場合(S13:NO)は、周辺マップを用いずに経路計算を行なう(S19)。
【0092】
目的地を含む周辺マップが記録されている場合(S13:YES)は、センタサーバ4等に接続して、その更新履歴を送って周辺マップが最新のものかを問い合わせる。センタサーバ4等は、上述のユーザ認証が正常終了後に該問合せ要求を受けた場合は、周辺マップデータベース60cを参照して該周辺マップの更新履歴と送られてきた更新履歴とを比較し、周辺マップデータベース60cの内容が新しい場合(S14:YES)は、該周辺マップをダウンロード可能か調べてダウンロード可能な場合(S15:YES)には、車両用周囲監視装置10に対して該周辺マップのダウンロードを行なう(S16)。そして、車両用周囲監視装置10ではダウンロードした周辺マップを用いて経路計算を行なう(S17)。
【0093】
センタサーバ4等に該周辺マップの新しいものがない場合(S14:NO)、あるいは該周辺マップをダウンロード不可能な場合(S15:NO)には、車両用周囲監視装置10に記録されている周辺マップを用いて経路計算を行なう(S18)。
【0094】
目的地の設定方法および経路計算方法は周知の車載用ナビゲーション装置と同じである。目的地は、ユーザが地図上の任意の地点あるいは施設検索や住所検索、電話番号、ユーザが設定した登録地などから地点を選択して所定の地点として設定する。地図データは記録部18の地図データ記録領域に記録されている。地図データは位置検出の精度向上のためのいわゆるマップマッチング用データ、を含む各種データを含み、表示用となる所定の地図画像情報を記憶すると共に、リンク情報やノード情報等を含む道路網情報を記憶する。リンク情報は、各道路を構成する所定の区間情報であって、位置座標、距離、所要時間、道幅、車線数、制限速度等から構成される。また、ノード情報は、交差点あるいは分岐路等を規定する情報であって、位置座標、右左折車線数、接続先道路リンク等から構成される。また、リンク間接続情報には、通行の可不可を示すデータなどが設定されている。
【0095】
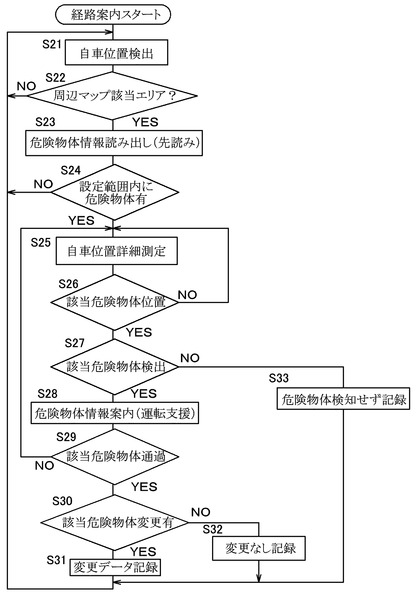
図7を用いて、経路案内中に周辺マップをどのように使い、危険物体情報をどう活用するかについて説明する。経路案内が開始されると、位置検出部162によって車両1の現在位置を検出する(S21)。次いで、記録部18の周辺マップ記録領域を参照して現在位置が周辺マップに該当するエリアに入っているかをチェックする。現在位置が周辺マップに該当するエリアに含まれる場合(S22:YES)、周辺マップに含まれる危険物体情報を先読みする。読み出した結果、例えば案内経路から100m以内のような設定範囲内に危険物体情報がある場合(S24:YES)、自車位置の詳細測定を開始する(S25)。
【0096】
上記で周辺マップ該当エリアではない場合(S22:NO)や設定範囲に危険物体がない場合(S24:NO)、現在位置の検出に戻る(S21)。
【0097】
自車位置の詳細測定が開始されると、測定された現在位置が該当する危険物体位置にあるかをチェックする。まだ、該当する危険物体位置にない場合(S26:NO)、再度、自車位置詳細測定を行なう(S25)。
【0098】
測定された現在位置が該当する危険物体位置にある場合(S26:YES)、危険物体を検出する。そして、危険物体が検出された場合(S27:YES)、危険物体情報(運転支援情報)を、前席用モニタ27あるいは後席用モニタ28の表示、または警告音発生部15のメッセージ送出によってユーザに報知する(S28)。そして、車両1が当該危険物体を通過したかをチェックし、当該危険物体を通過したと判定されると(S29:YES)、CCDカメラ19〜26,超音波センサ161a〜161fにより検出された車両周辺の状況を参照し、当該危険物体の情報に変更があったかどうかをチェックする。当該危険物体の情報に変更があれば(S30:YES)、その変更内容を記録部18に記録する(S31)。また、当該危険物体の情報に変更がない場合(S30:NO)も、その旨を記録部18に記録する(S32)。
【0099】
危険物体が検知されなかった場合(S27:NO)も、検知されなかったことを記録する(S33)。その場合詳細な走行経路履歴を記録し、後で危険物体情報の検知可否を判定することができる。
【0100】
図8は車両1が後退して縦列駐車を行なう場合に、危険物体との接触を注意するための表示意匠の別の例を示したものである。図8(a)は縦列駐車の様子を仮想的に前席用モニタ27あるいは後席用モニタ28に表示したものである。図8(a)のような表示を行なうかどうかはユーザが操作SW13によって切り替えが可能になっている。
【0101】
また、前席用モニタ27あるいは後席用モニタ28には図8(b)のようにタイヤHと縁石Gの関係が表示される。車両1が縁石Gに接近して縁石Gの危険度が大きくなり注意すべき距離になるとマーカーIは黄色表示となり、タイヤHが縁石Gに接触間近の場合はマーカーIは赤色表示となる。
【0102】
また、図8(c),図8(d)は、車両1のボディがガードレールNに接近した場合のボディと危険物体との位置関係を表示したものである。図8(c)の状態では、車両1が縁石Gに接近して縁石Gの危険度が大きくなり注意すべき距離になっているので、マーカーJは赤色表示となるとともに、ガードレールNにこれ以上接近しない方向に誘導するために、領域Kの輝度あるいは色を見づらいものに変化させる。図8(d)のように、さらに車両1がガードレールNの方向に接近した場合は、タイヤHと縁石Gとの距離が殆どないことを示すマーカーLを表示し、領域Mの輝度あるいは色をさらに見づらいものに変化させる。
【0103】
また、図9は車両1が後退して縦列駐車を行なう場合に、車両1の後方を前席用モニタ27あるいは後席用モニタ28に表示したものである。後方に危険物体となる車両2が駐車している場合、図9(a)のように距離に余裕がある場合にはマーカーPは緑色に表示され、図9(b)のように車両1がさらに後退して車両2との距離が所定の値を下回る等して危険度が大きくなるとマーカーQは赤色に表示される。
【0104】
以上、本発明の実施の形態を説明したが、これらはあくまで例示にすぎず、本発明はこれらに限定されるものではなく、特許請求の範囲の趣旨を逸脱しない限りにおいて、当業者の知識に基づく種々の変更が可能である。
【図面の簡単な説明】
【0105】
【図1】車両用周囲監視装置の構成を示すブロック図。
【図2】CCDカメラ,超音波センサの検出範囲を示す図。
【図3】周辺マップ作成処理を説明するためのフロー図。
【図4】危険物体の表示例を示す図。
【図5】危険物体表示の別の例を示す図。
【図6】危険物体情報を用いた経路計算処理を説明するためのフロー図。
【図7】危険物体情報を活用した経路案内処理を説明するためのフロー図。
【図8】縦列駐車時の危険物体の表示例を示す図。
【図9】縦列駐車時の危険物体表示の別の例を示す図。
【図10】サーバを用いた場合の構成図。
【図11】危険物体の位置の計算を説明するための図。
【図12】センタサーバの構成を示すブロック図。
【符号の説明】
【0106】
4 センタサーバ
5 ホームサーバ
10 車両用周囲監視装置
13 操作SW
14 通信部(送信手段,取得手段)
15 警告音発生部
16 センサ部
17 制御部(危険物体判定手段,危険物体情報検索手段,危険物体距離測定手段,経路計算手段,接近判定手段)
18 記録部(危険物体情報記録手段,地図データ記憶手段)
19〜26 CCDカメラ(撮影手段)
27 前席用モニタ(表示手段)
28 後席用モニタ(表示手段)
29 画像処理部(第一の物体位置検出手段,測定手段,距離測定手段,形状測定手段)
161 物体検出部(第二の物体位置検出手段,測定手段,距離測定手段,形状測定手段)
162 位置検出部(車両位置検出手段)
【技術分野】
【0001】
本発明は、車両に搭載される車載カメラやセンサ等を用いて自車両の周囲を監視する車両用監視装置に関するものである。
【背景技術】
【0002】
車載カメラを用いて、運転者にとって死角となる部分を撮影して、車内のディスプレイに表示する車載カメラ装置が知られている。この車載カメラ装置によれば、運転者は、ディスプレイに表示された映像を参照しながら、車両を所望の方向へ動かすことができる。
【0003】
例えば、自動車などの車両の後部に、ビデオカメラを取付けて、そのビデオカメラが撮影した映像を、車内の所定位置に配置されたモニタに表示させるようにした、いわゆるバックモニタと称されるものが実用化されている。このバックモニタは、主として車両を後退させる際に、運転席から死角となる後方がモニタで確認できるようにして、バック時の安全性を向上させるために使用される。この場合のモニタとしては、いわゆるカーナビゲーション装置として、走行中の現在位置近傍の道路地図などを表示させるためのモニタが使用されることが多い。また、バックモニタ専用の表示装置が運転席の近傍に配置される場合もある。
【0004】
また、撮影画像に基づいて検出される複数のエッジのうち、非立体障害物のエッジを除外して立体障害物のエッジを抽出し、抽出された立体障害物のエッジと車両との位置関係に基づいて立体障害物と車両との接触の可能性を乗員に報知するので、車両周囲に歩行者や対向車が存在する場合でも、運転者は安心して路肩に幅寄せをすることができる車両用周囲監視装置が考案されている(特許文献1参照)。
【0005】
また、車両の後方を撮影する少なくとも1つの後方撮影用ビデオカメラと、車両の後方を運転者が監視するインサイドミラーと、このインサイドミラーの近傍に取付けられてビデオカメラが撮影した映像が鏡像として表示される表示装置とで構成され、運転者はインサイドミラーを見るときに、このインサイドミラーの近傍に取付けられた表示装置に表示される後方の映像を見ることができる車両用監視装置が考案されている(特許文献2参照)。
【0006】
【特許文献1】特開2004−302609号公報
【特許文献2】特開2002−225629号公報
【発明の開示】
【発明が解決しようとする課題】
【0007】
特許文献1の例では、道路と平行なエッジを検出する手段と非立体障害物のエッジを除外して立体障害物のエッジを抽出する抽出手段が必要でシステムが複雑になり、装置のコスト上昇要因となる。また、側溝のような道路に対して突起していない立体障害物に対しては接触しないと判定されてしまう。また、障害物に対する危険性の程度は報知されず、立体障害物が複数ある場合の報知方法についても言及されていない。
【0008】
特許文献2の例では、後方の広い範囲の監視が可能になるが、本当に注意すべき地点を表示しないため、ユーザはかえって、表示を見ることに注意がいき、運転の障害となることが予想される危険物体を見逃すこともあり得る。
【0009】
上記問題を背景として、本発明の課題は、簡易な構成で車両の周囲の危険物体を検出し、その危険の程度をユーザに伝えることのできる車両用周囲監視装置を提供することにある。
【課題を解決するための手段および発明の効果】
【0010】
本発明は、上記課題を解決するための車両用周囲監視装置を提供するものである。即ち、請求項1によれば、車両の周辺を撮影する撮影手段と、撮影された画像から車両の周辺に存在する物体の位置を検出する第一の物体位置検出手段と、車両の位置を検出する車両位置検出手段と、第一の物体位置検出手段により検出された物体の位置および車両位置検出手段により検出された車両の位置に基づいて、物体が車両に危険を及ぼす危険物体であるかを判定する危険物体判定手段と、判定された危険物体の位置を車両の位置とともに危険物体情報として記録する危険物体情報記録手段と、を有することを特徴とする車両用周囲監視装置として構成される。
【0011】
上記構成によって、例えばCCDカメラ等の撮影手段で車両の周囲を撮影し、その撮影された画像に含まれる物体を車両の現在位置に基づいて危険物体であるかを判定することができる。また、従来技術のように立体障害物のエッジを抽出する必要もないので、低コストかつ簡易な構成で本発明の車両用周囲監視装置を実現することが可能となる。また、側溝のような道路に対して突起していない立体障害物も検出可能である。
【0012】
また、請求項2によれば、上記課題を解決するための車両用周囲監視装置は、車両の周辺に存在する物体の位置を検出する第二の物体位置検出手段と、車両の位置を検出する車両位置検出手段と、第二の物体位置検出手段により検出された物体の位置および車両位置検出手段により検出された車両の位置に基づいて、物体が車両に危険を及ぼす危険物体であるかを判定する危険物体判定手段と、判定された危険物体の位置を車両の位置とともに危険物体情報として記録する危険物体情報記録手段と、を有することを特徴とする車両用周囲監視装置として構成される。
【0013】
上記構成によって、例えば電磁波あるいは超音波等で車両の周囲をセンシングし、その反射波の状態により検出された物体を車両の現在位置に基づいて危険物体であるかを判定することができる。また、従来技術のように立体障害物のエッジを抽出する必要もないので、低コストかつ簡易な構成で本発明の車両用周囲監視装置を実現することが可能となる。また、側溝のような道路に対して突起していない立体障害物も検出可能である。
【0014】
また、請求項3によれば、上記課題を解決するための車両用周囲監視装置は、車両の周辺を撮影する撮影手段と、撮影された画像から車両の周辺に存在する物体の位置を検出する第一の物体位置検出手段と、車両の位置を検出する車両位置検出手段と、車両の周辺に存在する物体の位置を検出する第二の物体位置検出手段と、第一の物体位置検出手段および第二の物体位置検出手段により検出された物体の位置、ならびに車両位置検出手段により検出された車両の位置に基づいて物体が車両に危険を及ぼす危険物体であるかを判定する危険物体判定手段と、判定された危険物体の位置を車両の位置とともに危険物体情報として記録する危険物体情報記録手段と、を有することを特徴とする車両用周囲監視装置として構成される。
【0015】
上記構成によって、例えばCCDカメラ等の撮影手段で車両の周囲を撮影し、その撮影された画像に含まれる物体、および例えば電磁波あるいは超音波等で車両の周囲をセンシングし、その反射波の状態により検出された物体を車両の現在位置に基づいて危険物体であるかを判定することができる。二つの方法で危険物体であるかどうかを判定するので、判定の精度がさらに向上する。また、従来技術のように立体障害物のエッジを抽出する必要もないので、低コストかつ簡易な構成で本発明の車両用周囲監視装置を実現することが可能となる。また、側溝のような道路に対して突起していない立体障害物も検出可能である。
【0016】
請求項4によれば、本発明の車両用周囲監視装置は、物体の大きさを測定する測定手段を有し、危険物体判定手段は危険物体であるかどうかを測定された物体の大きさを考慮して判定する構成をとることができる。
【0017】
一般的に大きな物体ほど危険物体である可能性が大きい。また、物体の大きさは撮影された画像あるいは物体からの反射波の状態により測定できる。上記構成によって、新たな測定手段を設けずに低コストで危険物体であるかどうかを判定することが可能となる。
【0018】
請求項5によれば、本発明の車両用周囲監視装置は、車両と物体との距離を測定する距離測定手段を有し、危険物体判定手段は危険物体であるかどうかを測定された距離を考慮して判定する構成をとることができる。
【0019】
一般的に車両の近くに存在する物体ほど危険物体である可能性が大きい。また、車両と物体との距離は撮影された画像あるいは物体からの反射波の状態により測定できる。上記構成によって、新たな距離測定手段を設けずに低コストで危険物体であるかどうかを判定することが可能となる。
【0020】
請求項6によれば、本発明の車両用周囲監視装置は、物体の形状を測定する形状測定手段を有し、危険物体判定手段は危険物体であるかどうかを測定された物体の形状を考慮して判定する構成をとることができる。
【0021】
一般的に角があったり鋭角形状を有する物体ほど危険物体である可能性が大きい。また、物体の形状は撮影された画像あるいは物体からの反射波の状態により測定できる。上記構成によって、新たな形状測定手段を設けずに低コストで危険物体であるかどうかを判定することが可能となる。
【0022】
請求項7によれば、本発明の車両用周囲監視装置における危険物体情報には、危険物体の大きさ、高さ、重心位置、および車両との相対位置のうち少なくとも一つ以上が含まれる構成をとることができる。
【0023】
上記構成によって、大容量の記憶媒体を要することなく危険物体情報を効率よく記録することが可能となる。
【0024】
請求項8によれば、本発明の車両用周囲監視装置は、電子地図データを記憶する地図データ記憶手段を有し、危険物体情報記録手段には危険物体情報とともに車両の位置を含む所定の範囲の周辺地図データが記憶される構成をとることができる。
【0025】
上記構成によって、危険物体の位置だけではなく周辺の状況も把握することが可能となる。特に危険物体情報を表示する場合には、危険物体情報を表示してから周辺の地図を参照するという手間をかけないため、その位置関係を視覚的に短時間で把握することが可能となる。
【0026】
請求項9によれば、本発明の車両用周囲監視装置における危険物体情報記録手段は、危険物体が検出された車両の位置に対応した危険物体情報が既に記録されている場合、その危険物体情報と比較して比較結果が一致しない場合はその内容を更新する構成をとることができる。
【0027】
上記構成によって、常に最新の危険物体情報を少ない記憶領域で効率よく記録することが可能となる。
【0028】
請求項10によれば、本発明の車両用周囲監視装置は、危険物体情報記録手段に、検出された車両の位置に対応した危険物体情報が記録されているかどうかを検索する危険物体情報検索手段を有する構成をとることができる。
【0029】
上記構成によって、単に記録するだけではなく危険物体情報記録手段に記録されている危険物体情報を効率よく活用することが可能となる。
【0030】
請求項11によれば、本発明の車両用周囲監視装置は、撮影された画像上に当該危険物体を識別可能な表示意匠で重畳して表示する構成をとることができる。
【0031】
上記構成によって、車両が走行中に適切なタイミングで危険物体情報を表示して、ユーザに注意を促すことが可能となる。
【0032】
請求項12によれば、本発明の車両用周囲監視装置における表示手段は、危険物体の形状を撮影手段の撮影範囲に適応するように変形して表示可能であり、変形された危険物体を撮影手段により撮影された画像に重畳して表示する構成をとることができる。
【0033】
上記構成によって、撮影手段の撮影範囲すなわち車両の向きによって危険物体の形状を正確に表示することが可能となり、ユーザは危険物体に対して適切な対応をとることができる。
【0034】
請求項13によれば、本発明の車両用周囲監視装置における表示手段は、検索された危険物体が複数ある場合、危険物体毎に表示意匠を変えて表示する構成をとることができる。
【0035】
上記構成によって、ユーザは複数の危険物体があることを視覚的に素早く認識可能となる。
【0036】
請求項14によれば、本発明の車両用周囲監視装置における表示手段は、検索された危険物体が複数ある場合、危険物体毎に表示タイミングを変えて表示する構成をとることができる。
【0037】
上記構成によって、例えば車両との距離の近い順、危険度の高い順のような、ユーザが対応しなければならない優先度の高い順に表示すれば、ユーザはどの危険物体から対応すればよいか戸惑うことはなくなる。
【0038】
請求項15によれば、本発明の車両用周囲監視装置における表示手段は、危険物体の形状に応じて表示意匠を変えて表示する構成をとることができる。
【0039】
例えば縁石のような道路に対して凸状の危険物体と側溝のような道路に対して凹状の危険物体の表示意匠を変えて表示すれば、ユーザはどんな処置を取ればよいか予め決めることができ、余裕を持って対処することが可能となる。
【0040】
請求項16によれば、本発明の車両用周囲監視装置は、車両と危険物体との距離を測定する危険物体距離測定手段を有し、表示手段は、測定された距離に応じて危険物体の表示意匠を変えて表示する構成をとることができる。
【0041】
上記構成によって、ユーザは車両に近い危険物体から順次対応していけばよく、対応順序を間違えることはなくなる。
【0042】
請求項17によれば、本発明の車両用周囲監視装置は、危険物体情報を車両外部の外部機器に送信する送信手段を有する構成をとることができる。
【0043】
上記構成によって、ユーザの持つ危険物体情報を外部機器を介して他のユーザに提供することが可能となる。
【0044】
請求項18によれば、本発明の車両用周囲監視装置は、危険物体情報を車両外部の外部機器から取得する取得手段を有する構成をとることができる。
【0045】
上記構成によって、ユーザの走行したことのない地域の危険物体情報を取得することが可能となり、初めて走行する地域でも事前に取得した危険物体情報を基に予め危険物体への対応策や運転計画を考えておくことができる。
【0046】
請求項19によれば、本発明の車両用周囲監視装置における外部機器は、情報管理センタが所有するセンタサーバ、ユーザが所有するホームサーバ、あるいはWEBサーバである構成をとることができる。
【0047】
一般的にサーバはデータバックアップ体制も充実していて信頼性が高く、ウィルス対策,不正アクセス対策も充実していて安全性も高い。上記構成によって、危険物体情報を複数のユーザで安全な環境下で共有することが可能となる。
【0048】
請求項20によれば、本発明の車両用周囲監視装置は、目的地までの経路を計算する経路計算手段と、車両の現在位置が危険物体の所定の距離内に接近したかを判定する接近判定手段とを有し、危険物体検索手段は、経路の計算時に、目的地までの経路周辺の危険物体情報が記録されているかどうかを検索し、車両の位置が検索された危険物体の所定の距離内に接近した場合に、表示手段は当該危険物体情報を表示する構成をとることができる。
【0049】
通常の経路案内では経路周辺の施設情報程度しか提供されなかったが、上記構成によって、事前に危険物体情報が表示されるため、ユーザは余裕を持って該危険物体に対応することが可能となる。
【0050】
請求項21によれば、本発明の車両用周囲監視装置は、車両の位置が検索された危険物体の所定の距離内に接近した場合、第一の物体位置検出手段により検出された物体、または第二の物体位置検出手段により検出された物体の状況が当該危険物体情報の内容と異なる場合、危険物体情報記録手段は、第一の物体位置検出手段により検出された物体、または第二の物体位置検出手段により検出された物体の状況に基づいて当該危険物体情報を更新する構成をとることができる。
【0051】
上記構成によって、道路及び周辺の状況が以前走行したときから変化して、危険物体の状況に変化が生じても、危険物体情報記録手段には常に最新の危険物体情報が記録される。そして、ユーザは最新かつ正確な危険物体情報に基づいて車両を走行させることが可能となる。
【発明を実施するための最良の形態】
【0052】
簡易な構成で車両の周囲の危険物体を検出し、その危険の程度をユーザに伝えることのできる車両用周囲監視装置を提供するという目的を、カメラおよびセンサにより検出された物体の位置、ならびに車両の位置に基づいて物体が車両に危険を及ぼす危険物体であるかを判定し、その結果を記録する構成により実現した。
【実施例】
【0053】
以下、本発明の実施の形態を、図面に示す実施例を参照しながら説明する。図1に本発明の車両用周囲監視装置の全体構成を示す。車両用周囲監視装置10は、制御部17と、その制御部17に接続される、運転者検出部11,前進/後退検出部12,操作SW(スイッチ)13,通信部14,警告音発生部15,センサ部16,記録部18,画像処理部29,CCDカメラ19〜26,前席用モニタ27,後席用モニタ28を含んで構成されている。
【0054】
運転者検出部11は、運転席の着座部や背もたれ部に設けられたスイッチあるいは重量センサ等により運転者が着席しているかどうかを検出するものである。運転席およびその周辺部を検出範囲とする赤外センサ、あるいは運転席およびその周辺部を撮影範囲とするCCDカメラを用いて運転者の着席を検出してもよい。
【0055】
前進/後退検出部12は、車両1(図2参照)の前進/後退の状態を検出するもので、例えば、車両1のシフトレバーの位置を検出して、その位置に応じた信号を発生するシフトポジションセンサを用いる。
【0056】
操作SW13は、例えば前席用モニタ27あるいは後席用モニタ28と一体になったタッチパネルもしくはメカニカルなスイッチが用いられる。タッチパネルは、前席用モニタ27あるいは後席用モニタ28の画面上にガラス基盤と透明なフィルムにスペーサと呼ばれる隙間を介してX軸方向、Y軸方向に電気回路が配線され、フィルム上をユーザがタッチすると、押された部分の配線がショートして電圧値が変わるため、これを2次元座標値(X,Y)として検出する、いわゆる抵抗膜方式が広く用いられる。その他に、透明な導電性基盤のガラス面に電気信号を受ける物質を塗布し、指をガラス面に近づけると静電容量の変化を電気信号としてセンサで検知する、いわゆる静電容量方式を用いてもよい。
【0057】
メカニカルスイッチ,タッチパネルの他に、操作SW13としてマウスやカーソル等のポインティングデバイスを用いてもよい。また、図示しないマイクおよび音声認識ユニットを用いて種々の指示を入力することも可能である。これは、マイクから入力された音声信号を、音声認識ユニットにおいて周知の隠れマルコフモデル等の音声認識アルゴリズムにより音声を識別する音声認識技術により処理を行ない、その結果に応じた操作コマンドに変換するものである。さらに、リモコン端末を用いる構成としてもよい。
【0058】
本発明の送信手段,取得手段である通信部14は公衆回線あるいはインターネットを介して外部機器との通信を行なうもので、周知の無線あるいは有線による送信回路および受信回路を含んで構成される。
【0059】
本発明の危険物体判定手段,危険物体情報検索手段,危険物体距離測定手段,経路計算手段,接近判定手段である制御部17は通常のコンピュータとして構成されており、周知のCPU171,ROM172,RAM173,入出力回路であるI/O174およびこれらの構成を接続するバスライン175が備えられている。CPU171は、ROM172に記憶された制御プログラムおよびデータにより制御を行なう。
【0060】
警告音発生部15は、周知の音声合成回路およびスピーカを含んで構成され、ROM172に記憶される制御プログラムの指令によって記録部18あるいはROM172に記憶されるデジタル音声データを音声合成回路においてアナログ音声に変換したものが送出される。なお、音声合成の方法には、音声波形をそのままあるいは符号化して蓄積しておき、必要に応じて繋ぎあわせる録音編集方式などがある。また、警告音発生部15として周知のオーディオ装置を接続し、制御部17からデジタル音声データあるいは発声指令をオーディオ装置へ送り、オーディオ装置が該デジタル音声データあるいは発声指令に基づいて警告音を送出するようにしてもよい。
【0061】
センサ部16は、車両1の周囲の物体を検出する物体検出部161,車両1の現在位置を検出する位置検出部162,車両1の速度を検出する車速検出部163を含んで構成される。
【0062】
本発明の第二の物体位置検出手段,測定手段,距離測定手段,形状測定手段である物体検出部161は、非接触で物体の位置を検出するもので、超音波センサやマイクロ波レーダ等が用いられる。物体検出部161は、参照信号を外部に出力し、その参照信号が反射して戻ってくるまでの時間によりどの方向にどのような物体があるかを検出する。参照信号のスキャン方式により、物体までの距離や物体の大きさを検出することができる。図2のように、車両1には超音波センサ161a(左前方:バンパー),161b(左側方:センターピラー),161c(左後方:バンパー),161d(右後方:バンパー),161e(右側方:センターピラー),161f(右前方:バンパー)が取り付けられている。
【0063】
本発明の車両位置検出手段である位置検出部162は、衛星からの電波に基づいて車両1の位置を検出するGPS(Global Positioning System:全地球測位システム)受信機が用いられる。精度を上げるには外部との通信を行なって位置補正を行ない正確な車両位置を計測できるD−GPS(Differential-GPS:差分補正・全地球測位システム)や、RTK−GPS(Real Time Kinematic GPS)が用いられる。
【0064】
位置検出部162は、GPS受信機の他に、周知の地磁気センサ,ジャイロスコープ,距離センサを用いてもよい。これらのセンサは各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお、精度によっては前述したうちの一部のセンサで構成してもよく、さらに、ステアリングの回転センサや各転動輪の車輪センサを用いてもよい。
【0065】
車速検出部163は、周知のロータリエンコーダ等の回転検出部を含み、例えば車輪取り付け部付近に設置されて車輪の回転を検出してパルス信号として制御部17に送るものである。制御部17では、その車輪の回転数を車両1の速度に換算して、車両1の現在位置から所定の場所までの予想到達時間を算出したり、車両1の走行区間毎の平均車速を算出することができる。
【0066】
本発明の危険物体情報記録手段,地図データ記憶手段である記録部18は、EEPROM(Electrically Erasable & Programmable Read Only Memory:電気的消去・プログラム可能・読出し専用メモリ)やフラッシュメモリ等の書き換え可能な半導体メモリ、あるいはハードディスク装置等によって構成され、車両用周囲監視装置10の動作に必要な情報およびデータが記録されている。また、車両用周囲監視装置10の電源がオフ状態になっても、記録内容は保持される。
【0067】
本発明の表示手段である前席用モニタ27,後席用モニタ28は周知のカラー液晶表示器で構成され、ドット・マトリックスLCD(Liquid Crystal Display)およびLCD表示制御を行なうための図示しないドライバ回路を含んで構成されている。ドライバ回路は、例えば、画素毎にトランジスタを付けて目的の画素を確実に点灯させたり消したりすることができるアクティブマトリックス駆動方式が用いられ、制御部17から送られる表示指令および表示画面データに基づいて表示を行なう。また、表示器として有機EL(ElectroLuminescence:電界発光)表示器,プラズマ表示器を用いてもよい。
【0068】
なお、前席用モニタ27は、車両1のインストルメントパネルの中央部に取り付けられる。また、後席用モニタ28は運転席の背もたれと助手席の背もたれの間,運転席あるいは助手席の背もたれ,あるいは天井部に取り付けられる。
【0069】
本発明の撮影手段であるCCDカメラ19〜26は周知のもので、図2のようにCCDカメラ19から順に車両1の前方(CCDカメラ19),左前方(CCDカメラ20),左側方(CCDカメラ21),左後方(CCDカメラ22),後方(CCDカメラ23),右後方(CCDカメラ24),右側方(CCDカメラ25),右前方(CCDカメラ26)を撮影し、撮影範囲は、それぞれ、a(CCDカメラ19),b(CCDカメラ20),c(CCDカメラ21),d(CCDカメラ22),e(CCDカメラ23),f(CCDカメラ24),g(CCDカメラ25),h(CCDカメラ26)となっている。
【0070】
本発明の第一の物体位置検出手段,測定手段,距離測定手段,形状測定手段である画像処理部29は、公知のパターン認識などの技術によって、CCDカメラ19〜26によって撮影された画像の解析を行なうための画像処理回路を含んで構成される。
【0071】
図3のフロー図を用いて、周辺マップ作成処理について説明する。なお、本処理はROM172の制御プログラムに含まれ他の処理とともに繰り返し実行される。また、本処理を運転者検出部11により運転者の着座を検出した場合にのみ実行するようにしてもよい。まず、超音波センサ161a〜161fおよびCCDカメラ19〜26により、車両1の周囲に物体があるかを検出する(S1)。
【0072】
画像処理部29あるいは記録部18には、検出の基準となる物体の基準データが記憶されている。撮影した画像とその基準データを順次比較して、撮影した画像に含まれている内容と物体の基準データとの一致割合が所定の値を超えると、撮影した画像にその物体が含まれていることを検出できる。
【0073】
物体が検出された場合には、超音波センサ161a〜161fの反射波の受信状態あるいはCCDカメラ19〜26による撮影画像から画像処理を行なって求めることができる物体の大きさ(幅、奥行き、高さ、輪郭等)により、検出された物体が車両1に危険を及ぼす物体であるかを判定する。すなわち、車両1の位置に対して、車体に接触する高さを持つ物体(縁石、置石、分離帯、街路樹、標識、看板)、道路上の凹み(側溝、ぬかるみ、穴)を検出し、その物体の車両1に対する危険度を判定する。
【0074】
危険度は以下の判定基準の少なくとも一つを用いて判定する。
(1)物体の位置:物体の位置が走行車線上の中央部に近いほど危険度が大きい。
(2)物体の高さ:物体の高さが車両1の最低地上高よりも高い位置にあるほど危険度が大きい。また、枝のように上から垂れ下がるような物体の場合は車両1の最大地上高よりも低い位置にあるほど危険度が大きい。
(3)物体の硬度:電柱や標識のように硬度が高いほど危険度が大きい。
(4)物体の大きさ:物体が大きいほど危険度が大きい。
(5)凹みの規模(大きさ,深さ):凹みの規模が大きいほど危険度が大きい。
(6)車両1との位置関係:車両1との距離が近いほど、あるいは車両1の進路上に近い位置にあるほど危険度が大きい。
【0075】
危険と判定された物体は、その位置情報(大きさ、高さ、相対位置(センサからの位置)、重心位置:緯度経度)を車両位置情報とともに記録する。この重心位置は車両1の緯度、経度、高さの測定値を用いて以下のように計算する。
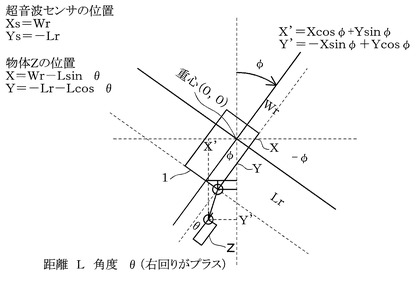
【0076】
例えばRTK−GPSで測定した位置を車両1の重心位置の緯度、経度、高さとして設定し、車幅、車長、車高をオフセット値(図5参照)として車両1の存在範囲を設定する。また超音波センサ161a〜161fの取り付け位置を予め入力しておき、超音波センサによる物体との距離計測値を計算して、危険と判定された物体の位置が計算できる。以下に、図11を用いた具体例を示す。
【0077】
RTK−GPS測定位置を、緯度座標を北緯NN,東経EE、高さをXXmとする。NN,EEは秒単位で、1秒は約22m、よって1/1000秒単位で2.2cmになる。また、測定誤差は数cmである。車両1の方向を北方向を0度にとり時計回りに角度が増加すると仮定する。車両1の代表点0を(0,0)、超音波センサ位置座標を(Xs,Ys)、超音波センサから測定した物体Zの位置を(r,θ)とする。角度は車両1が北向きのときの真後ろ方向が0度、右回転方向を+にとる。超音波センサが車両1の後方の2つのコーナー(図2では161c,161d)に設置されるとすると、Xs=Wr(Wr:幅方向のオフセット値)Ys=−Lr(後方の向きをマイナスにとる)となる。物体Zの位置をX,Y座標系で表すと、物体Zの位置(X,Y)は、車両1が真北を向いていると(Wr−rsinθ,−Lr−rcosθ)となる。また、車両1が真北から角度Φの方向にある場合、物体Zの座標(X',Y')は、(XcosΦ+YsinΦ,−XsinΦ+YcosΦ)となる。この値を緯度経度に変換し、RTK−GPSによる測定値との演算を行なえば、物体境界の絶対位置座標を算出できる。
【0078】
車両1の周囲に物体が検出された場合(S2:YES)、算出された絶対位置座標を危険度とともに記録部18の所定の領域に記録する(S3)。
【0079】
記録部18の地図データ記録領域に記録されている地図データから、車両1の現在位置を基準とした所定の範囲のデータを読み出し、物体の位置を記録して周辺マップを作成する(S4)。このとき、物体の大きさ(幅、奥行き、高さ、輪郭等)も合わせて記録する。
【0080】
そして、記録部18の周辺マップ記録領域あるいは履歴記録領域を参照して、以前に車両1の現在位置に関する周辺マップを作成して記録していないかを調べ、作成・記録を行なっていない場合には、上記で作成したものを周辺マップ記録領域に記録する。一方、以前に作成・記録を行なっている場合には、既に記録されている内容と今回作成された周辺マップの内容を比較し、内容に相違があれば今回作成された内容を追記した上で周辺マップ記録領域に記録して、周辺マップをアップデートし(S5)、その履歴を記録部18の履歴記録領域に記録する(S6)。
【0081】
図4および図5に、前席用モニタ27あるいは後席用モニタ28での表示例を示す。図4のように車両1が後退車庫入れを行なう場合、前進/後退検出部12で車両1の後退を検出して、CCDカメラ22〜24を作動させ、その画像を例えば前席用モニタ27に表示する。また、超音波センサ161c、161dも作動させる。なお、必要に応じてCCDカメラ21,25、超音波センサ161b、161eも作動させてもよい。図4(a)の例では車両1と縁石Bとの間に物体Cが存在する。CCDカメラ22〜24による撮影画像と超音波センサ161c、161dの反射波の受信状態から物体Cの位置および形状が判定され、次いで物体Cの危険度が求められ物体Cが車両1に接触する等の車両1の車庫入れの妨げになると判定された場合、図4(b)のように、前席用モニタ27で拡大表示が行なわれ、危険度に応じてメッセージも付加される。また、警告音発生部15から警告音あるいは警告メッセージが発せられる。
【0082】
図5の例は、車両1を道路左側に寄せて駐車する際の前席用モニタ27の表示例である。車両1は前進しているので、CCDカメラ19,20,26と超音波センサ161a,161fが作動している。なお、必要に応じてCCDカメラ21,25、超音波センサ161b、161eも作動させてもよい。側溝Eは凹状の物体として、縁石D,Fは凸状の物体として検出される。記録部18に、例えば「道路脇にある直方体の物体:縁石」のように、物体の形状と名称を関連付けて記録しておいて、各モニタに表示してもよい。側溝は、「道路脇にあり道路に沿って連続する凹状の物体」となる。図5で、「道路脇にあり道路に沿って連続する凹状の物体」Eを検出し、これを側溝と判定した場合には、その部分を水が流れるような表示としてもよい。
【0083】
また、図5の右側の表示のように、車両1を上方から見た各物体との位置関係を合わせて表示してもよい。無論、操作SW13の操作で切り換え表示できるようにしてもよい。
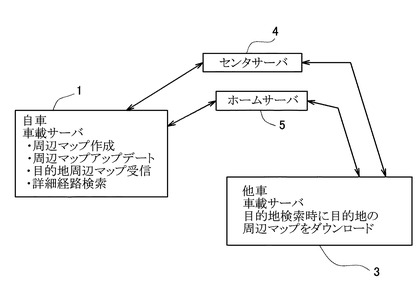
【0084】
図10のように、記録部18に記録されている周辺マップデータは、通信部14を介してユーザの自宅にあるホームサーバ5,データセンタ等にあるセンタサーバ4、あるいはインターネット上の図示しないWEBサーバと送受信可能としてもよい。例えば、図3の例では、周辺マップデータがアップデートされた場合に、アップデートされた内容が自動あるいは操作SW13の操作によりホームサーバ5あるいはセンタサーバ4に送られる。また、他のユーザの車両3はホームサーバ5あるいはセンタサーバ4に記録されている周辺マップデータをダウンロード可能である。
【0085】
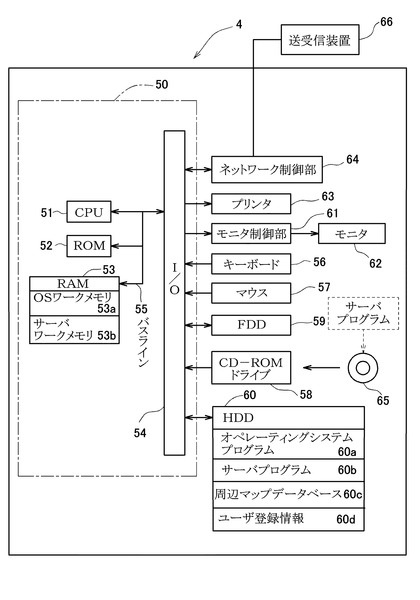
図12を用いてセンタサーバ4の構成を説明する。なお、ホームサーバ5あるいは図示しないWEBサーバもセンタサーバ4と同様の構成である。センタサーバ4は、CPU51,ROM52,RAM53および入出力インターフェース(I/O)54を有し、これらがバスライン55により送受信可能に接続されたコンピュータ本体50を備え、これに周辺機器として、キーボード56あるいはマウス57等の入力装置,CD−ROMドライブ58あるいはFDD59等の記録媒体読取装置,HDD(ハードディスクドライブ)60,モニタ制御部61を介して接続されるモニタ62,プリンタ63、および外部ネットワークにつながる送受信装置66等との通信を行なうネットワーク制御部64等が接続されたコンピュータシステムとして全体が構築されている。
【0086】
HDD60には、オペレーティングシステムプログラム(以下、OSという)60a及びサーバプログラム60bが格納されている。サーバプログラム60bは、サーバとしての機能を実現するため、OS60a上でRAM53に確保されるサーバワークメモリ53bを作業領域とする形で作動するものである。これは、例えばCD−ROM65等にコンピュータで読み取り可能な状態で記憶され、HDD60上の所定の記憶領域にインストールされるものである。外部ネットワークからサーバプログラム60bあるいはデータをダウンロードする構成を用いてもよい。また、RAM53には、OS60aのワークメモリ53aも形成される。
【0087】
また、HDD60には、周辺マップデータベース60cが構築されている。周辺マップデータベース60cは車両用周囲監視装置10等からネットワークを経由して送られるデータ、キーボード56あるいはマウス57等の入力装置によるデータ入力、あるいは記録媒体からのデータ入力により随時更新され、常に最新の状態となっている。
【0088】
また、HDD60には、ユーザ登録情報60dが記録されている。ユーザ登録情報60dには、ユーザIDやパスワード,車両用周囲監視装置10等の車載端末を識別するための情報である端末IDが登録されており、どのユーザがどの車載端末によってセンタサーバ4に接続を可能とするか登録をしておく。
【0089】
車両用周囲監視装置10で周辺マップのアップデートが発生した場合、自動あるいは操作SW13の操作により通信部14,外部ネットワークを介してセンタサーバ4(あるいはホームサーバ5,WEBサーバ)に接続する。接続が確立したら記録部18に記録されているユーザID,パスワード,端末IDをセンタサーバ4に送り、センタサーバ4でユーザ登録情報60dとの照合を行なう。照合の結果、正規ユーザと判定されたら、その旨が車両用周囲監視装置10に伝えられ、車両用周囲監視装置10からセンタサーバ4にアップデート内容が送られる。センタサーバ4ではアップデート内容と周辺マップデータベース60cとを比較して内容に相違があればその差分を取り込んで記録する。
【0090】
また、センタサーバ4等から車両用周囲監視装置10に周辺マップのデータを送ることも可能である。以下、この処理について車両用周囲監視装置10で経路計算を行なう場合を例に挙げて図6のフロー図を例に説明する。なお、本処理はROM172の制御プログラムに含まれ他の処理とともに繰り返し実行される。まず、操作SW13の操作により経路計算モードに移行し(S11)、目的地を入力する(S12)。
【0091】
次いで、記録部18の記録領域を参照し、入力された目的地を含む周辺マップが記録されているかを調べる。目的地を含む周辺マップが記録されていない場合(S13:NO)は、周辺マップを用いずに経路計算を行なう(S19)。
【0092】
目的地を含む周辺マップが記録されている場合(S13:YES)は、センタサーバ4等に接続して、その更新履歴を送って周辺マップが最新のものかを問い合わせる。センタサーバ4等は、上述のユーザ認証が正常終了後に該問合せ要求を受けた場合は、周辺マップデータベース60cを参照して該周辺マップの更新履歴と送られてきた更新履歴とを比較し、周辺マップデータベース60cの内容が新しい場合(S14:YES)は、該周辺マップをダウンロード可能か調べてダウンロード可能な場合(S15:YES)には、車両用周囲監視装置10に対して該周辺マップのダウンロードを行なう(S16)。そして、車両用周囲監視装置10ではダウンロードした周辺マップを用いて経路計算を行なう(S17)。
【0093】
センタサーバ4等に該周辺マップの新しいものがない場合(S14:NO)、あるいは該周辺マップをダウンロード不可能な場合(S15:NO)には、車両用周囲監視装置10に記録されている周辺マップを用いて経路計算を行なう(S18)。
【0094】
目的地の設定方法および経路計算方法は周知の車載用ナビゲーション装置と同じである。目的地は、ユーザが地図上の任意の地点あるいは施設検索や住所検索、電話番号、ユーザが設定した登録地などから地点を選択して所定の地点として設定する。地図データは記録部18の地図データ記録領域に記録されている。地図データは位置検出の精度向上のためのいわゆるマップマッチング用データ、を含む各種データを含み、表示用となる所定の地図画像情報を記憶すると共に、リンク情報やノード情報等を含む道路網情報を記憶する。リンク情報は、各道路を構成する所定の区間情報であって、位置座標、距離、所要時間、道幅、車線数、制限速度等から構成される。また、ノード情報は、交差点あるいは分岐路等を規定する情報であって、位置座標、右左折車線数、接続先道路リンク等から構成される。また、リンク間接続情報には、通行の可不可を示すデータなどが設定されている。
【0095】
図7を用いて、経路案内中に周辺マップをどのように使い、危険物体情報をどう活用するかについて説明する。経路案内が開始されると、位置検出部162によって車両1の現在位置を検出する(S21)。次いで、記録部18の周辺マップ記録領域を参照して現在位置が周辺マップに該当するエリアに入っているかをチェックする。現在位置が周辺マップに該当するエリアに含まれる場合(S22:YES)、周辺マップに含まれる危険物体情報を先読みする。読み出した結果、例えば案内経路から100m以内のような設定範囲内に危険物体情報がある場合(S24:YES)、自車位置の詳細測定を開始する(S25)。
【0096】
上記で周辺マップ該当エリアではない場合(S22:NO)や設定範囲に危険物体がない場合(S24:NO)、現在位置の検出に戻る(S21)。
【0097】
自車位置の詳細測定が開始されると、測定された現在位置が該当する危険物体位置にあるかをチェックする。まだ、該当する危険物体位置にない場合(S26:NO)、再度、自車位置詳細測定を行なう(S25)。
【0098】
測定された現在位置が該当する危険物体位置にある場合(S26:YES)、危険物体を検出する。そして、危険物体が検出された場合(S27:YES)、危険物体情報(運転支援情報)を、前席用モニタ27あるいは後席用モニタ28の表示、または警告音発生部15のメッセージ送出によってユーザに報知する(S28)。そして、車両1が当該危険物体を通過したかをチェックし、当該危険物体を通過したと判定されると(S29:YES)、CCDカメラ19〜26,超音波センサ161a〜161fにより検出された車両周辺の状況を参照し、当該危険物体の情報に変更があったかどうかをチェックする。当該危険物体の情報に変更があれば(S30:YES)、その変更内容を記録部18に記録する(S31)。また、当該危険物体の情報に変更がない場合(S30:NO)も、その旨を記録部18に記録する(S32)。
【0099】
危険物体が検知されなかった場合(S27:NO)も、検知されなかったことを記録する(S33)。その場合詳細な走行経路履歴を記録し、後で危険物体情報の検知可否を判定することができる。
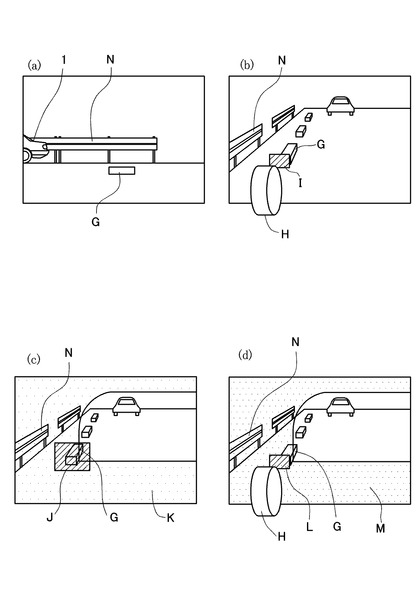
【0100】
図8は車両1が後退して縦列駐車を行なう場合に、危険物体との接触を注意するための表示意匠の別の例を示したものである。図8(a)は縦列駐車の様子を仮想的に前席用モニタ27あるいは後席用モニタ28に表示したものである。図8(a)のような表示を行なうかどうかはユーザが操作SW13によって切り替えが可能になっている。
【0101】
また、前席用モニタ27あるいは後席用モニタ28には図8(b)のようにタイヤHと縁石Gの関係が表示される。車両1が縁石Gに接近して縁石Gの危険度が大きくなり注意すべき距離になるとマーカーIは黄色表示となり、タイヤHが縁石Gに接触間近の場合はマーカーIは赤色表示となる。
【0102】
また、図8(c),図8(d)は、車両1のボディがガードレールNに接近した場合のボディと危険物体との位置関係を表示したものである。図8(c)の状態では、車両1が縁石Gに接近して縁石Gの危険度が大きくなり注意すべき距離になっているので、マーカーJは赤色表示となるとともに、ガードレールNにこれ以上接近しない方向に誘導するために、領域Kの輝度あるいは色を見づらいものに変化させる。図8(d)のように、さらに車両1がガードレールNの方向に接近した場合は、タイヤHと縁石Gとの距離が殆どないことを示すマーカーLを表示し、領域Mの輝度あるいは色をさらに見づらいものに変化させる。
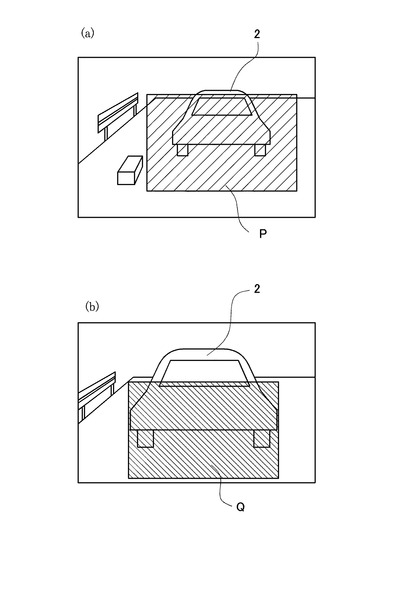
【0103】
また、図9は車両1が後退して縦列駐車を行なう場合に、車両1の後方を前席用モニタ27あるいは後席用モニタ28に表示したものである。後方に危険物体となる車両2が駐車している場合、図9(a)のように距離に余裕がある場合にはマーカーPは緑色に表示され、図9(b)のように車両1がさらに後退して車両2との距離が所定の値を下回る等して危険度が大きくなるとマーカーQは赤色に表示される。
【0104】
以上、本発明の実施の形態を説明したが、これらはあくまで例示にすぎず、本発明はこれらに限定されるものではなく、特許請求の範囲の趣旨を逸脱しない限りにおいて、当業者の知識に基づく種々の変更が可能である。
【図面の簡単な説明】
【0105】
【図1】車両用周囲監視装置の構成を示すブロック図。
【図2】CCDカメラ,超音波センサの検出範囲を示す図。
【図3】周辺マップ作成処理を説明するためのフロー図。
【図4】危険物体の表示例を示す図。
【図5】危険物体表示の別の例を示す図。
【図6】危険物体情報を用いた経路計算処理を説明するためのフロー図。
【図7】危険物体情報を活用した経路案内処理を説明するためのフロー図。
【図8】縦列駐車時の危険物体の表示例を示す図。
【図9】縦列駐車時の危険物体表示の別の例を示す図。
【図10】サーバを用いた場合の構成図。
【図11】危険物体の位置の計算を説明するための図。
【図12】センタサーバの構成を示すブロック図。
【符号の説明】
【0106】
4 センタサーバ
5 ホームサーバ
10 車両用周囲監視装置
13 操作SW
14 通信部(送信手段,取得手段)
15 警告音発生部
16 センサ部
17 制御部(危険物体判定手段,危険物体情報検索手段,危険物体距離測定手段,経路計算手段,接近判定手段)
18 記録部(危険物体情報記録手段,地図データ記憶手段)
19〜26 CCDカメラ(撮影手段)
27 前席用モニタ(表示手段)
28 後席用モニタ(表示手段)
29 画像処理部(第一の物体位置検出手段,測定手段,距離測定手段,形状測定手段)
161 物体検出部(第二の物体位置検出手段,測定手段,距離測定手段,形状測定手段)
162 位置検出部(車両位置検出手段)
【特許請求の範囲】
【請求項1】
車両の周辺を撮影する撮影手段と、
前記撮影された画像から前記車両の周辺に存在する物体の位置を検出する第一の物体位置検出手段と、
前記車両の位置を検出する車両位置検出手段と、
前記第一の物体位置検出手段により検出された物体の位置および前記車両位置検出手段により検出された前記車両の位置に基づいて、前記物体が前記車両に危険を及ぼす危険物体であるかを判定する危険物体判定手段と、
前記判定された危険物体の位置を前記車両の位置とともに危険物体情報として記録する危険物体情報記録手段と、
を有することを特徴とする車両用周囲監視装置。
【請求項2】
車両の周辺に存在する物体の位置を検出する第二の物体位置検出手段と、
前記車両の位置を検出する車両位置検出手段と、
前記第二の物体位置検出手段により検出された物体の位置および前記車両位置検出手段により検出された前記車両の位置に基づいて、前記物体が前記車両に危険を及ぼす危険物体であるかを判定する危険物体判定手段と、
前記判定された危険物体の位置を前記車両の位置とともに危険物体情報として記録する危険物体情報記録手段と、
を有することを特徴とする車両用周囲監視装置。
【請求項3】
車両の周辺を撮影する撮影手段と、
前記撮影された画像から前記車両の周辺に存在する物体の位置を検出する第一の物体位置検出手段と、
前記車両の位置を検出する車両位置検出手段と、
車両の周辺に存在する物体の位置を検出する第二の物体位置検出手段と、
前記第一の物体位置検出手段および前記前記第二の物体位置検出手段により検出された物体の位置、ならびに前記車両位置検出手段により検出された前記車両の位置に基づいて前記物体が前記車両に危険を及ぼす危険物体であるかを判定する危険物体判定手段と、
前記判定された危険物体の位置を前記車両の位置とともに危険物体情報として記録する危険物体情報記録手段と、
を有することを特徴とする車両用周囲監視装置。
【請求項4】
前記物体の大きさを測定する測定手段を有し、
前記危険物体判定手段は前記危険物体であるかどうかを前記測定された前記物体の大きさを考慮して判定する請求項1ないし3のいずれか1項に記載の車両用周囲監視装置。
【請求項5】
前記車両と前記物体との距離を測定する距離測定手段を有し、
前記危険物体判定手段は前記危険物体であるかどうかを前記測定された距離を考慮して判定する請求項1ないし4のいずれか1項に記載の車両用周囲監視装置。
【請求項6】
前記物体の形状を測定する形状測定手段を有し、
前記危険物体判定手段は前記危険物体であるかどうかを前記測定された前記物体の形状を考慮して判定する請求項1ないし5のいずれか1項に記載の車両用周囲監視装置。
【請求項7】
前記危険物体情報には、前記危険物体の大きさ、高さ、重心位置、および前記車両との相対位置のうち少なくとも一つ以上が含まれる請求項1ないし6のいずれか1項に記載の車両用周囲監視装置。
【請求項8】
電子地図データを記憶する地図データ記憶手段を有し、前記危険物体情報記録手段には前記危険物体情報とともに前記車両の位置を含む所定の範囲の周辺地図データが記憶される請求項1ないし7のいずれか1項に記載の車両用周囲監視装置。
【請求項9】
前記危険物体情報記録手段は、前記危険物体が検出された前記車両の位置に対応した危険物体情報が既に記録されている場合、その危険物体情報と比較して比較結果が一致しない場合はその内容を更新する請求項1ないし8のいずれか1項に記載の車両用周囲監視装置。
【請求項10】
前記危険物体情報記録手段に、前記検出された車両の位置に対応した前記危険物体情報が記録されているかどうかを検索する危険物体情報検索手段を有する請求項1ないし9のいずれか1項に記載の車両用周囲監視装置。
【請求項11】
前記撮影された画像上に危険物体を識別可能な表示意匠で重畳して表示する表示手段を有する請求項1ないし10のいずれか1項に記載の車両用周囲監視装置。
【請求項12】
前記表示手段は、前記危険物体の形状を前記撮影手段の撮影範囲に適応するように変形して表示可能であり、前記変形された危険物体を前記撮影手段により撮影された画像に重畳して表示する請求項11に記載の車両用周囲監視装置。
【請求項13】
前記表示手段は、前記検索された危険物体が複数ある場合、前記危険物体毎に表示意匠を変えて表示する請求項11または12に記載の車両用周囲監視装置。
【請求項14】
前記表示手段は、前記検索された危険物体が複数ある場合、前記危険物体毎に表示タイミングを変えて表示する請求項11ないし13のいずれか1項に記載の車両用周囲監視装置。
【請求項15】
前記表示手段は、前記危険物体の形状に応じて表示意匠を変えて表示する請求項11ないし14のいずれか1項に記載の車両用周囲監視装置。
【請求項16】
前記車両と前記危険物体との距離を測定する危険物体距離測定手段を有し、
前記表示手段は、前記測定された距離に応じて前記危険物体の表示意匠を変えて表示する請求項11ないし15のいずれか1項に記載の車両用周囲監視装置。
【請求項17】
前記危険物体情報を前記車両外部の外部機器に送信する送信手段を有する請求項1ないし16のいずれか1項に記載の車両用周囲監視装置。
【請求項18】
前記危険物体情報を前記車両外部の外部機器から取得する取得手段を有する請求項1ないし17のいずれか1項に記載の車両用周囲監視装置。
【請求項19】
前記外部機器は、情報管理センタが所有するセンタサーバ、ユーザが所有するホームサーバ、あるいはWEBサーバである請求項17または18に記載の車両用周囲監視装置。
【請求項20】
目的地までの経路を計算する経路計算手段と、
前記車両の現在位置が危険物体の所定の距離内に接近したかを判定する接近判定手段とを有し、
前記危険物体検索手段は、前記経路の計算時に、前記目的地までの経路周辺の危険物体情報が記録されているかどうかを検索し、
前記車両の位置が前記検索された危険物体の所定の距離内に接近した場合に、前記表示手段は当該危険物体情報を表示する請求項10ないし19のいずれか1項に記載の車両用周囲監視装置。
【請求項21】
前記車両の位置が前記検索された危険物体の所定の距離内に接近した場合、前記第一の物体位置検出手段により検出された物体、または前記第二の物体位置検出手段により検出された物体の状況が当該危険物体情報の内容と異なる場合、前記危険物体情報記録手段は、前記第一の物体位置検出手段により検出された物体、または前記第二の物体位置検出手段により検出された物体の状況に基づいて当該危険物体情報を更新する請求項20に記載の車両用周囲監視装置。
【請求項1】
車両の周辺を撮影する撮影手段と、
前記撮影された画像から前記車両の周辺に存在する物体の位置を検出する第一の物体位置検出手段と、
前記車両の位置を検出する車両位置検出手段と、
前記第一の物体位置検出手段により検出された物体の位置および前記車両位置検出手段により検出された前記車両の位置に基づいて、前記物体が前記車両に危険を及ぼす危険物体であるかを判定する危険物体判定手段と、
前記判定された危険物体の位置を前記車両の位置とともに危険物体情報として記録する危険物体情報記録手段と、
を有することを特徴とする車両用周囲監視装置。
【請求項2】
車両の周辺に存在する物体の位置を検出する第二の物体位置検出手段と、
前記車両の位置を検出する車両位置検出手段と、
前記第二の物体位置検出手段により検出された物体の位置および前記車両位置検出手段により検出された前記車両の位置に基づいて、前記物体が前記車両に危険を及ぼす危険物体であるかを判定する危険物体判定手段と、
前記判定された危険物体の位置を前記車両の位置とともに危険物体情報として記録する危険物体情報記録手段と、
を有することを特徴とする車両用周囲監視装置。
【請求項3】
車両の周辺を撮影する撮影手段と、
前記撮影された画像から前記車両の周辺に存在する物体の位置を検出する第一の物体位置検出手段と、
前記車両の位置を検出する車両位置検出手段と、
車両の周辺に存在する物体の位置を検出する第二の物体位置検出手段と、
前記第一の物体位置検出手段および前記前記第二の物体位置検出手段により検出された物体の位置、ならびに前記車両位置検出手段により検出された前記車両の位置に基づいて前記物体が前記車両に危険を及ぼす危険物体であるかを判定する危険物体判定手段と、
前記判定された危険物体の位置を前記車両の位置とともに危険物体情報として記録する危険物体情報記録手段と、
を有することを特徴とする車両用周囲監視装置。
【請求項4】
前記物体の大きさを測定する測定手段を有し、
前記危険物体判定手段は前記危険物体であるかどうかを前記測定された前記物体の大きさを考慮して判定する請求項1ないし3のいずれか1項に記載の車両用周囲監視装置。
【請求項5】
前記車両と前記物体との距離を測定する距離測定手段を有し、
前記危険物体判定手段は前記危険物体であるかどうかを前記測定された距離を考慮して判定する請求項1ないし4のいずれか1項に記載の車両用周囲監視装置。
【請求項6】
前記物体の形状を測定する形状測定手段を有し、
前記危険物体判定手段は前記危険物体であるかどうかを前記測定された前記物体の形状を考慮して判定する請求項1ないし5のいずれか1項に記載の車両用周囲監視装置。
【請求項7】
前記危険物体情報には、前記危険物体の大きさ、高さ、重心位置、および前記車両との相対位置のうち少なくとも一つ以上が含まれる請求項1ないし6のいずれか1項に記載の車両用周囲監視装置。
【請求項8】
電子地図データを記憶する地図データ記憶手段を有し、前記危険物体情報記録手段には前記危険物体情報とともに前記車両の位置を含む所定の範囲の周辺地図データが記憶される請求項1ないし7のいずれか1項に記載の車両用周囲監視装置。
【請求項9】
前記危険物体情報記録手段は、前記危険物体が検出された前記車両の位置に対応した危険物体情報が既に記録されている場合、その危険物体情報と比較して比較結果が一致しない場合はその内容を更新する請求項1ないし8のいずれか1項に記載の車両用周囲監視装置。
【請求項10】
前記危険物体情報記録手段に、前記検出された車両の位置に対応した前記危険物体情報が記録されているかどうかを検索する危険物体情報検索手段を有する請求項1ないし9のいずれか1項に記載の車両用周囲監視装置。
【請求項11】
前記撮影された画像上に危険物体を識別可能な表示意匠で重畳して表示する表示手段を有する請求項1ないし10のいずれか1項に記載の車両用周囲監視装置。
【請求項12】
前記表示手段は、前記危険物体の形状を前記撮影手段の撮影範囲に適応するように変形して表示可能であり、前記変形された危険物体を前記撮影手段により撮影された画像に重畳して表示する請求項11に記載の車両用周囲監視装置。
【請求項13】
前記表示手段は、前記検索された危険物体が複数ある場合、前記危険物体毎に表示意匠を変えて表示する請求項11または12に記載の車両用周囲監視装置。
【請求項14】
前記表示手段は、前記検索された危険物体が複数ある場合、前記危険物体毎に表示タイミングを変えて表示する請求項11ないし13のいずれか1項に記載の車両用周囲監視装置。
【請求項15】
前記表示手段は、前記危険物体の形状に応じて表示意匠を変えて表示する請求項11ないし14のいずれか1項に記載の車両用周囲監視装置。
【請求項16】
前記車両と前記危険物体との距離を測定する危険物体距離測定手段を有し、
前記表示手段は、前記測定された距離に応じて前記危険物体の表示意匠を変えて表示する請求項11ないし15のいずれか1項に記載の車両用周囲監視装置。
【請求項17】
前記危険物体情報を前記車両外部の外部機器に送信する送信手段を有する請求項1ないし16のいずれか1項に記載の車両用周囲監視装置。
【請求項18】
前記危険物体情報を前記車両外部の外部機器から取得する取得手段を有する請求項1ないし17のいずれか1項に記載の車両用周囲監視装置。
【請求項19】
前記外部機器は、情報管理センタが所有するセンタサーバ、ユーザが所有するホームサーバ、あるいはWEBサーバである請求項17または18に記載の車両用周囲監視装置。
【請求項20】
目的地までの経路を計算する経路計算手段と、
前記車両の現在位置が危険物体の所定の距離内に接近したかを判定する接近判定手段とを有し、
前記危険物体検索手段は、前記経路の計算時に、前記目的地までの経路周辺の危険物体情報が記録されているかどうかを検索し、
前記車両の位置が前記検索された危険物体の所定の距離内に接近した場合に、前記表示手段は当該危険物体情報を表示する請求項10ないし19のいずれか1項に記載の車両用周囲監視装置。
【請求項21】
前記車両の位置が前記検索された危険物体の所定の距離内に接近した場合、前記第一の物体位置検出手段により検出された物体、または前記第二の物体位置検出手段により検出された物体の状況が当該危険物体情報の内容と異なる場合、前記危険物体情報記録手段は、前記第一の物体位置検出手段により検出された物体、または前記第二の物体位置検出手段により検出された物体の状況に基づいて当該危険物体情報を更新する請求項20に記載の車両用周囲監視装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【公開番号】特開2007−49219(P2007−49219A)
【公開日】平成19年2月22日(2007.2.22)
【国際特許分類】
【出願番号】特願2005−228458(P2005−228458)
【出願日】平成17年8月5日(2005.8.5)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成19年2月22日(2007.2.22)
【国際特許分類】
【出願日】平成17年8月5日(2005.8.5)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]