
車両用変速制御システム
【課題】簡単な操作で所望の定速走行が実現する車両用変速制御システムを簡単な構成で提供する。
【解決手段】変速制御システムは、無段変速装置20の変速値を設定する変速制御部62と、無段変速装置20に対する変速指令を変速制御部62に与える変速操作具と、変速制御部62に対して、定速モード時の変速値である定速モード変速値を変更する変更指令、定速モードへの移行を指令する移行指令、定速モードからの離脱を指令する離脱指令を与える定速走行操作手段と、定速走行操作手段による移行指令に基づいて記憶部から読み込んだ定速モード変速値での定速モードを変速制御部に実行させる定速走行管理部63を備えている。
【解決手段】変速制御システムは、無段変速装置20の変速値を設定する変速制御部62と、無段変速装置20に対する変速指令を変速制御部62に与える変速操作具と、変速制御部62に対して、定速モード時の変速値である定速モード変速値を変更する変更指令、定速モードへの移行を指令する移行指令、定速モードからの離脱を指令する離脱指令を与える定速走行操作手段と、定速走行操作手段による移行指令に基づいて記憶部から読み込んだ定速モード変速値での定速モードを変速制御部に実行させる定速走行管理部63を備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、エンジンからの回転動力を無段変速して出力する無段変速装置を備えた車両を一定速度で走行させる定速モードを有する変速制御システムに関する。
【背景技術】
【0002】
車両を一定速度で走行させる定速モードはクルーディングモードとも呼ばれるが、トラクタなどの作業車両が一定速度で走行しながら耕耘や整地などの作業を行うときに用いられる。この定速モードを用いることにより、運転者は、車両速度調整の煩わしさから解放される。このような定速モードを有する作業車両が特許文献1に記載されている。この作業車両は、無段変速装置として静油圧式無段変速装置(以下HSTと略称する)を搭載し、油圧ポンプの斜板角を設定された所定角度に保持することで定速走行を実現している。このため、油圧ポンプの斜板角を操作する変速制御手段に対して変速値としての斜板目標操作位置を設定する操作具として、変速ペダルと摩擦式の位置保持具が備えられている定速レバーが備えられている。定速レバーによって設定される斜板目標操作位置と変速ペダルによって設定される斜板目標操作位置との間でその対応する車両速度が大きい方の斜板目標操作位置が実際のHSTの変速値となる。従って、例えば、定速レバーによって設定される斜板目標操作位置をゼロ速度に設定しておけば、変速ペダルの操作量に応じてHSTが変速され、所望の車両速度を得ることができる。定速レバーを所望の定速走行速度が得られる操作位置に保持しておくと、変速ペダルによる斜板目標操作位置が定速レバーによる斜板目標操作位置より低い位置にあれば(この状態は変速ペダルから足を外してフリーにしておくことで容易に実現する)、その所望の定速走行速度で車両を定速走行させることができる。
しかしながら、摩擦保持される定速レバーを用いた定速モード制御では、摩擦力が邪魔をして、正確な定速車両速度の設定が難しい。特に、低速レバーをゼロ速度まで下げて定速モードを解除した後、再び先と同じ速度での定速モードを設定することは困難である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008‐37400号公報(段落番号〔0027−0087〕、図6)
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記実情に鑑み、本発明の課題は、簡単な操作で所望の定速走行が実現する車両用変速制御システムを簡単な構成で提供することである。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本発明による、車両を一定速度で走行させる定速モードを有する1つの変速制御システムは、エンジンからの回転動力を無段変速して出力する無段変速装置と、前記無段変速装置の変速値を設定する変速制御部と、前記無段変速装置に対する変速指令を前記変速制御部に与える変速操作具と、定速モードによる走行を前記変速制御部に実行させる定速走行管理部と、前記定速モードに関する操作指令として、前記変速操作具に基づく現在変速値を前記定速モード変速値として用いて前記定速モードに移行させる第1操作指令と、前記定速モードからの離脱を指令する離脱指令を、前記変速制御部に与える定速走行操作手段とを備えている。
【0006】
この構成では、定速走行操作手段によって通常走行の車両を定速走行させる定速モードへの移行及び定速モードから通常走行への復帰を指令するとともに、当該定速モードのための車両速度を決定する変速値を調整することができる。従って、定速モードでの走行中においても、運転者の所望の走行速度に調整することが簡単に実現できる。その際、定速走行操作手段を単一の定速走行操作器で構成すれば、変速制御システム構成が簡素化される。
【0007】
上記課題を解決するため、本発明による、車両を一定速度で走行させる定速モードを有する他の1つの変速制御システムは、エンジンからの回転動力を無段変速して出力する無段変速装置と、前記無段変速装置の変速値を設定する変速制御部と、前記無段変速装置に対する変速指令を前記変速制御部に与える変速操作具と、前記変速制御部に対して、定速モード時の変速値である定速モード変速値を変更する変更指令、前記定速モードへの移行を指令する移行指令、前記定速モードからの離脱を指令する離脱指令を与える定速走行操作手段と、前記定速走行操作手段によって設定された定速モード変速値を記憶する記憶部と、前記定速走行操作手段による前記移行指令に基づいて前記記憶部から読み込んだ定速モード変速値での定速モードを前記変速制御部に実行させる定速走行管理部とを備えている。
【0008】
この構成では、定速走行操作手段によって車両を定速走行させる定速モードへの移行を指令するとともに当該定速モードのための車両速度を決定する変速値を調整することができる。さらに、定速モード時に設定された定速モード変速値は記憶部に記憶されるように構成されており、一旦定速モードから離脱して再び定速モードへ移行した時には、記憶部から読み出された定速モード変速値が用いられるので、前回と同じ車両速度で車両を定速走行させることができる。
【0009】
本発明の好適な実施形態の1つでは、前記定速走行操作手段が単一の定速走行操作器で構成され、前記定速走行操作器は、所定変速値単位の変更指令を与える変更操作位置と、前記変速制御部に前記定速モードへの移行を指令する移行操作位置と、前記定速モードからの離脱を指令する離脱操作位置とを有する。単一の定速走行操作器に対する操作で、定速モードへの移行及び定速モードからの離脱が行われるだけではなく、無段変速装置の変速値の変更、つまり定速走行時の車両速度の調整も可能であるので、操作が簡単となるだけでなく、制御入力信号系の配線も単純となる。
【0010】
そのような定速走行操作器のより具体的で好適な形態の1つでは、前記定速走行操作器は、付勢保持される中立位置を基点とした一方方向と他方方向の操作変位が可能であり、一方方向での終端操作変位位置が前記移行操作位置であり、他方方向での終端操作変位位置が前記離脱操作位置であり、一方方向及び他方方向での終端操作変位位置までの単位操作変位位置が前記変更操作位置となっている。つまり、基点からの2つの操作方向と各操作方向での2つの操作位置(操作深さ)に、定速モードへの移行、定速モードからの離脱、定速モードにおける車両速度の増減調整を割り当てることができる。例えば、2段階シーソー型のスイッチを採用するなら、一方方向の浅押しで定速走行速度の上昇、一方方向の深押しで定速モードへの移行、他方方向の浅押しで定速走行速度の下降、他方方向の一方方向の深押しで定速モードからの離脱を実現することができる。
【0011】
本発明では、定速モードおける車両速度を決定する変速値が記憶部に記憶されるが、作業種別や走行地面状態などによって定速走行速度は異なるのが一般的である。従って、1つの作業が完了した時点で記憶部をクリアしておき、新たな作業において所定の走行速度を得たときに定速モードに移行して、その時の変速値を記憶することが好適である。このことを考慮して、本発明の好適な実施形態の1つでは、車両キースイッチON時に前記記憶部がクリアされ、前記記憶部がクリア状態の場合、変速制御部は前記定速モード変速値として前記変速操作具による変速指令に基づく変速値を用いるように構成されている。
【0012】
定速走行はエンジン回転数を一定にするとともに、変速値も一定として、車両速度を一定するものであり、ある程度長時間の走行状態となる。定速走行作業にはエンジン負荷が小さい作業や大きい作業が含まれている。また、同じ作業でも作業環境によってはエンジン負荷が変動する。エンジン負荷が小さいとき、つまりエンジンに余裕があるときには、エンジン回転数を低下させ、その分だけ変速値を速度増加側に調整することで、同一車両速度が得られるようにすると燃費がよくなる。このことを考慮して、本発明の好適な実施形態の1つでは、エンジン負荷に余裕がある低負荷を判定するエンジン負荷判定部が備えられ、前記定速モード時において前記低負荷が判定された場合、エンジン回転数を所定量だけ低減させるとともに、車両速度を維持するために当該回転数低下指令によるエンジン回転数の低下を補償するように前記変速値を変更する。これにより、省エネルギ定速走行が実現する。
【0013】
定速モードへの移行時に実行される速度に自由度を与えるための、好適な実施形態の一例では、前記定速走行操作手段による移行指令には、前記変速操作具に基づく現在変速値を前記定速モード変速値として用いて前記定速モードに移行させる第1操作指令と、前記記憶部から読み込んだ定速モード変速値を用いて前記定速モードに移行させる第2操作指令とが含まれている。
また、定速モード時に任意に定速モード時車速を調整するための簡単な構成として、本発明の好適な実施形態の1つでは、前記定速走行操作手段による変更指令には、前記定速モード変速値の微増速調整を実行する微増速調整指令と、前記微増速調整より大きな増速をもたらす通常増速調整を実行する通常増速調整指令と、前記定速モード変速値の微減速調整を実行する微減速調整指令と、前記微減速調整より大きな減速をもたらす通常減速調整を実行する通常減速調整指令とが含まれている。
【0014】
本発明には上述した本発明の特徴を変形させた変速制御システムも含まれる。例えば、そのような本発明による、車両を一定速度で走行させる定速モードを有する変速制御システムの1つでは、エンジンからの回転動力を無段変速して出力する無段変速装置と、前記無段変速装置の変速値を設定する変速制御部と、前記無段変速装置に対する変速指令を前記変速制御部に与える変速操作具と、定速モードによる走行を前記変速制御部に実行させる定速走行管理部と、前記定速モード時の変速値である定速モード変速値を記憶する記憶部と、前記定速モードに関する操作指令として、前記変速操作具に基づく現在変速値を前記定速モード変速値として用いて前記定速モードに移行させる第1操作指令と、前記記憶部から読み込んだ定速モード変速値を用いて前記定速モードに移行させる第2操作指令と、前記定速モードからの離脱を指令する離脱指令を、前記変速制御部に与える定速走行操作手段とが備えられている。この構成でも、簡単な操作で自由度の高い所望の定速走行制御が実現する。
【0015】
さらに、簡単な操作で自由度の高い定速走行制御を実現するために、前記定速走行操作手段は、前記定速モード変速値の微増速調整を実行する第3操作指令と、前記微増速調整より大きな増速をもたらす通常増速調整を実行する第4操作指令と、前記定速モード変速値の微減速調整を実行する第5操作指令と、前記微減速調整より大きな減速をもたらす通常減速調整を実行する第6操作指令とを前記変速制御部に与えるように構成することができる。その際、前記定速走行操作手段の構成を簡単化するためには、少なくとも7つの操作状態を評価させることができる単一の定速走行操作器で構成するとよい。例えば、前記定速走行操作器は4つの操作スイッチ位置を有し、前記各操作スイッチ位置において少なくとも2段階の操作時間が評価されるような構成が好都合である。より具体的な好適実施形態としての前記定速走行操作器は、付勢保持される中立位置を基点とした一方方向で2段階の操作位置及び他方方向で2段階の操作位置が作り出されるシーソー型スイッチである。
【0016】
上述したように車両キースイッチON時またはOFF時に前記記憶部がクリアされる場合、変速制御部は前記定速モード変速値として前記変速操作具による変速指令に基づく変速値を用いるように構成してもよいが、これに代えて、前記記憶部が車両キースイッチOFF時にその内容がクリアされない不揮発性メモリから構成され、前記記憶部に記憶された定速モード変速値は書き換えられるまで維持されるような構成を採用してもよい。これにより、作業者が意識して定速モード変速値を書き変えない限り、常に同じ定速モード変速値、つまり同じ車速での作業が可能となる。
【図面の簡単な説明】
【0017】
【図1】本発明の変速制御システムにおける定速モードへの移行と定速モードからの離脱の制御の流れを図解する模式図である。
【図2】発明の変速制御システムにおける定速モード時の車両速度の増減制御の流れを図解する模式図である。
【図3】本発明の変速制御システムを導入した作業車両の一例としてのトラクタの外観図である。
【図4】図3のトラクタの運転操作部の運転席からみた斜視図である。
【図5】トラクタのパワートレインと変速制御系統の一例を示すブロック図である。
【図6】変速制御系の機能ブロック図である。
【図7】変速ECUの機能ブロック図である。
【図8】定速モード状態を表示する計器パネルの平面図である。
【図9】変速制御状態の移り変わりを示す状態遷移図である。
【図10】本発明の変速制御システムの別実施形態の定速モード走行制御の流れをしめす模式図である。
【図11】本発明の変速制御システムの別実施形態の定速モード走行制御の流れをしめす模式図である。
【図12】図10の定速モード走行制御の流れを補足する模式図である。
【図13】図11の定速モード走行制御の流れを補足する模式図である。
【図14】本発明の変速制御システムのさらに別な実施形態の定速モード走行制御の流れをしめす模式図である。
【図15】図14の定速モード走行制御の流れを補足する模式図である。
【発明を実施するための形態】
【0018】
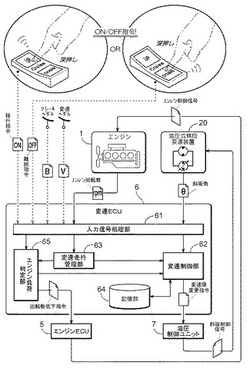
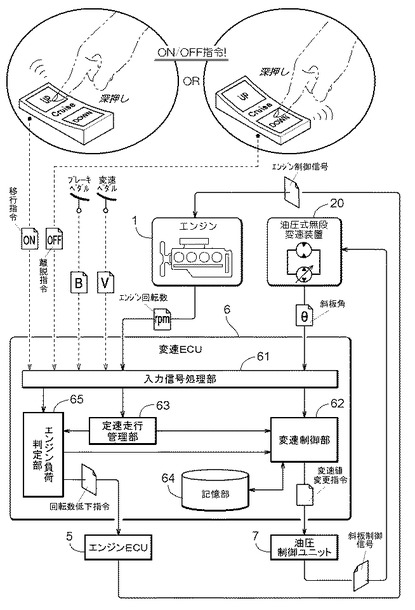
以下、本発明の実施の形態を具体的に説明する前に、本発明の変速制御システムによる定速車両走行を実現する定速モード制御の基本原理を図1と図2とを用いて説明する。図1は定速モードへの移行と定速モードからの離脱の制御の流れを図解する模式図であり、図2は定速モード時の車両速度の増減制御の流れを図解する模式図である。ここでは、無段変速装置としてHSTやHMTなどの油圧式無段変速装置20が用いられている。変速操作具は変速ペダルとして構成されている。
【0019】
定速走行操作手段は、所定変速値単位の変更指令を与える変更操作位置と、変速ECU6に定速モードへの移行を指令する移行操作位置と、定速モードからの離脱を指令する離脱操作位置とを有する、単一の定速走行操作器であるシーソー形スイッチ90(以下定速スイッチと称する)で構成されている。この定速スイッチ90は、バネ等により付勢保持される中立位置を基点とした一方方向(反時計方向)と他方方向(時計方向)の操作変位(揺動変位)が可能である。一方方向への操作変位を行う押し操作面には「UP」が記されており、他方方向への操作変位を行う押し操作面には「DOWN」が記されている。一方方向での終端操作変位位置が移行操作位置であり、この位置まで深押しすることにより、第1接点がアクティブとなる。第1接点がアクティブとなることにより、ON信号が変速ECU6に与えられる。このON信号は定速モードへの移行を要求する移行指令として取り扱われる。他方方向での終端操作変位位置が離脱操作位置であり、この位置まで深押しすることにより、第2接点がアクティブとなる。第2接点がアクティブとなることにより、OFF信号が変速ECU6に与えられる。このOFF信号は定速モードからの離脱を要求する離脱指令として取り扱われる。
【0020】
この定速スイッチ90は、それぞれの操作(押し)方向において、2段階スイッチとして構成されている。つまり、一方方向での終端操作変位位置と中立位置との間に設定されている増速用変更操作位置に第3接点が形成されており、同様に他方方向での終端操作変位位置と中立位置との間に設定されている減速用変更操作位置に第4接点が設定されている。さらに、増速用変更操作位置及び終端操作変位位置において、クリック感が生じるように構成されている。この構成により、図2で示しているように、定速スイッチ90の「UP」押し操作面を用いて増速用変更操作位置まで浅押しすることで第3接点がアクティブとなり、増速のための変更指令が変速ECU6に与えられる。この変更指令は単位変速位置の増加、例えば時速2kmの増加に対応する変速値調整(斜板角調整)をもたらす。従って、増速用変更操作位置までの浅押しを繰り返すと、斜板角度の利用範囲内で、その繰り返し分の速度増加が実現する。また、定速スイッチ90の「DOWN」押し操作面を用いて減速用変更操作位置まで浅押しすることで第4接点がアクティブとなり、減速のための変更指令が変速ECU6に与えられる。この変更指令は単位変速位置の減少、例えば時速2kmの減速に対応する変速値調整(斜板角調整)をもたらす。従って、減速用変更操作位置までの浅押しを繰り返すと、斜板角度ゼロまでの範囲内で、その繰り返し分の速度低下が実現する。
【0021】
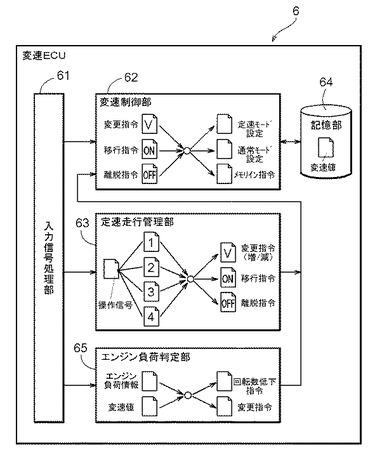
変速ECU6には、各種指令や信号を受け取って、内部の各機能部に転送する入力信号処理部61が備えられている。変速制御部62は所望の変速を実現するために、油圧式無段変速装置20の斜板角を制御する油圧制御ユニットに変速値変更指令を与える。定速走行管理部63は、移行指令を受けて変速制御部62に対して定速モードへの移行を要求し、離脱指令を受けて定速モードからの離脱を要求する。変速制御部62は移行指令を受け取った場合、定速モードにおける定速走行の速度を設定する。その際、記憶部64に変速値が記憶されている場合には、その変速値を用いて油圧式無段変速装置20の変速を行う。記憶部64に変速値が記憶されている場合には、現状の油圧式無段変速装置20の変速値を定速走行の速度設定のために用い、当該変速値を記憶部64に記憶する。
【0022】
図2から理解できるように、定速スイッチ90から増速の変更指令が変速ECU6に送られると、定速走行管理部63は変速制御部62に単位変速値分の変速値変更(速度増速)を依頼する。また、定速スイッチ90から減速の変更指令が変速ECU6に送られると、定速走行管理部63は変速制御部62に単位変速値分の変速値変更(速度減速)を依頼する。変速制御部62は変速値変更指令を油圧制御ユニット7に与えると、その新規変速値を記憶部64に記憶させる。従って、記憶部64にはその時点で定速走行している際の変速値が記憶されることになる。なお、記憶部64に記憶される変速値は、車両速度に対応する値であり、必ずしも実際の変速比などを示す値でなくてもよい。油圧式無段変速装置20を通じて車両速度を決定するために用いられる指標であればよい。また、図1や図2では図示されていないが、車両キースイッチがONされたとき、または車両キースイッチがOFFされたときには、記憶部64の内容がクリアされる。
【0023】
定速モードからの離脱は、定速スイッチ90からの離脱指令以外に、変速ペダルを通じて定速走行の車両速度を増速する操作がなされた時や、ブレーキペダルを通じて定速走行の車両速度を増速する操作がなされた時にも、変速制御部62に離脱指令が与えられる。つまり、変速ペダルやブレーキペダルの操作は、定速スイッチ90の操作に優先するようになっている。
【0024】
エンジン負荷判定部65は、エンジンECU5からのエンジン負荷情報と予め設定された判定条件に基づいてエンジン負荷に余裕がある低負荷を判定する。定速モード時において低負荷が判定された場合、エンジン回転数を所定量だけ低減させるとともに、車両速度を維持するために当該回転数低下指令によるエンジン回転数の低下を補償するような変速値を変速制御部62に与える。
【0025】
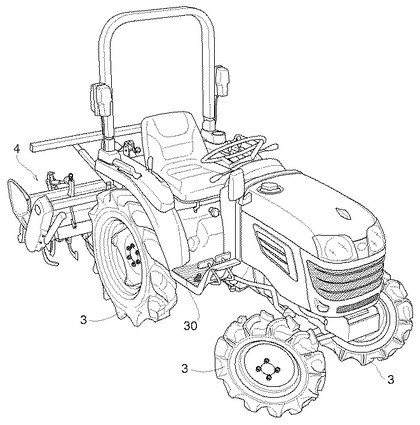
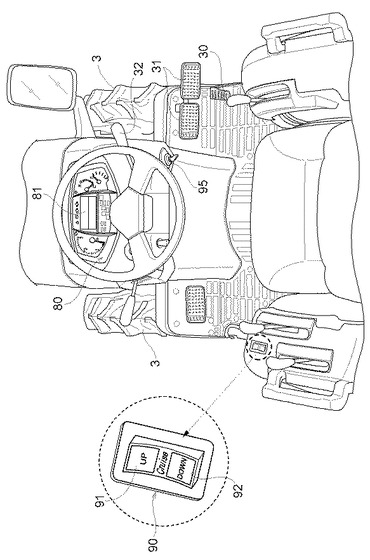
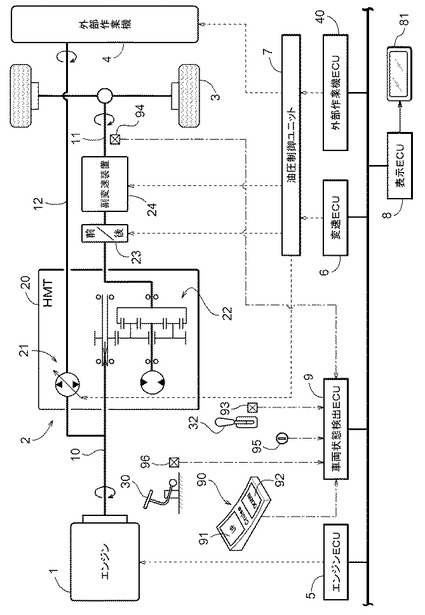
次に、本発明の実施の形態を具体的に説明する。この実施の形態では、本発明の変速制御システムはトラクタに組み込まれている。このトラクタは、無段変速装置としてHMT(油圧機械式無段変速装置)20が用いられており、ここでも変速操作具は変速ペダル30として構成され、定速走行操作手段は、上述したような定速スイッチ90として構成されている。図3はトラクタの外観図であり、図4はトラクタの運転部の運転席からみた斜視図であり、図5トラクタのパワートレインと変速制御系統の一例を示すブロック図である。
【0026】
このトラクタは、駆動輪3によって支持された機体の後部に、ここでは耕耘装置である外部作業機4を装備している。機体の前部に配置されているエンジン1はコモンレール方式で回転制御される形式のディーゼルエンジン1である。エンジン1の出力軸10からの動力は、HMT20と前後進切換装置23と複数段(ここでは高低2段)の変速を行う副変速装置24とを通じて変速出力軸11に伝達され、最終的に駆動輪(前輪または後輪あるいはその両方)3を回転させる。さらに、このエンジン1の出力軸10からの分岐動力はPTO伝動系12を経てトラクタに装備されている耕耘作業機などの外部作業機4にも伝達される。
【0027】
HMT20は、エンジン1の出力軸10からの動力を受ける斜板式可変吐出型油圧ポンプと当該油圧ポンプからの油圧によって回転して動力を出力する油圧モータとからなるHST(静油圧式変速装置)21と、遊星歯車機構22とか構成されている。遊星歯車機構22は、エンジン1の出力軸10からの動力と油圧モータからの動力とを入力として、その変速出力を前後進切換装置23に供給するように構成されている。HST21は単独でも油圧式無段変速装置20として機能可能である。
【0028】
このHST21では、エンジン1からの動力がポンプ軸に入力されることにより、油圧ポンプから油圧モータに圧油が供給され、油圧モータが油圧ポンプからの油圧によって回転駆動されてモータ軸を回転させる。油圧モータの回転はモータ軸を通じて遊星歯車機構22に伝達される。HST21は、油圧ポンプの斜板に連動されているシリンダを変位させることにより、この斜板の角度変更が行なわれ、正回転状態、逆回転状態、及び正回転状態と逆回転状態の間に位置する中立状態に変速され、かつ正回転状態に変速された場合においても逆回転状態に変速された場合においても、油圧ポンプの回転速度を無段階に変更して油圧モータの回転速度(時間当たり回転数)を無段階に変更する。その結果、油圧モータから遊星歯車機構22に出力する動力の回転速度を無段階に変更する。HST21は、斜板が中立状態に位置されることで、油圧ポンプによる油圧モータの回転を停止、結果的には油圧モータから遊星歯車機構22に対する出力を停止する。
【0029】
遊星歯車機構22は、サンギヤと、当該サンギヤの周囲に等間隔で分散して配置された3個の遊星ギヤと、各遊星ギヤを回転自在に支持するキャリヤと、3個の遊星ギヤに噛合うリングギヤと、前後進切換装置23に連結している出力軸11とを備えている。なお、この実施形態では、キャリヤは外周にエンジン1の出力軸10に取り付けられた出力ギヤと噛み合うギヤ部を形成しているとともに、サンギヤのボス部に相対回転自在に支持されている。
【0030】
上述した構成により、このHMT20は、HST21の斜板角度を変更することにより、駆動輪3への動力伝達を、無段階で変速することができる。この斜板制御は、変速ECU6からの制御指令に基づいて動作する油圧制御ユニット7の油圧制御によって実現する。運転者がこの変速ペダル30を踏み込むことによって生じる操作量(ここでは揺動角度)を検出信号として生成するペダルセンサ96も設けられている。ペダルセンサ96は、例えばポテンショメータなどにより構成される。変速ペダル30の近傍には左右輪用のブレーキペダル31が配置されている。また、運転部には、エンジン回転数を調整するためのアクセルレバー32と当該アクセルレバー32の操作位置を検出して操作信号を生成するレバーセンサ93が備えられている。
【0031】
「UP」押し操作面91と「DOWN」押し操作面92を有するシーソー形定速スイッチ90は、この実施形態では図4に示されているように、後輪フェンダの上部を覆う左側サイドパネル上に設けられているが、右側のサイドパネルやステアリングハンドルやハンドル前方のフロントパネルなどに設けてもよい。
【0032】
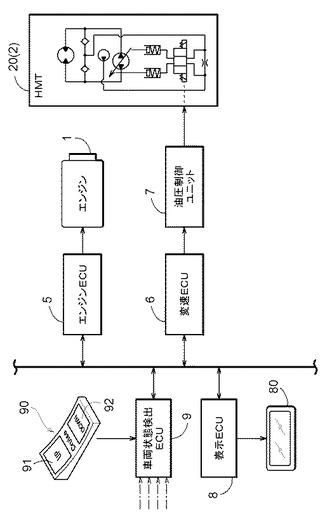
この変速制御システムの制御系は、エンジンECU(エンジン制御ユニット)5、変速ECU(変速制御ユニット)6、油圧制御ユニット7、表示ECU8、車両状態検出ECU9、外部作業機ECU40などから構成され、それぞれは車載LANによってデータ伝送可能に接続されている。
【0033】
車両状態検出ECU9は、トラクタに配備されている種々のセンサからの信号や、運転者によって操作される操作器の状態を示す操作入力信号を入力し、必要に応じて信号変換や評価演算を行い、得られた信号やデータを車載LANに送り出す。この車両状態検出E
CU9に入力される信号のうち、特に本発明に関係するものとしては、定速スイッチ90からの操作位置信号、変速ペダル30の操作量を検出するペダルセンサ96からの信号、トラクタ車速の演算にも用いることができる変速出力軸11の回転速度(回転数)を検出する回転センサ(又は車速センサ)94からの信号、アクセルレバー32の操作量を検出するアクセルセンサ93からの信号、車両キースイッチ95からの信号などが挙げられる。
【0034】
エンジンECU5は、よく知られているように、エンジン1を電子制御するための中核機能部であり、外部操作入力信号及び内部センサ信号等によって推定されるエンジン1の運転状態に応じて、予め設定されているプログラムに基づく制御、例えば定回転数制御や定トルク制御など種々のタイプのエンジン制御を行う。外部作業機ECU40は、外部作業機4を制御するための制御信号を生成する。
【0035】
図6または図7に示すように、変速ECU6は、変速ペダル30の操作量や定速スイッチ90の操作状態等に基づいてHMT20の変速比を設定する変速値を演算し、油圧制御ユニット7を介してHMT20のHST斜板角を油圧制御する。これにより、HMT20の変速比が決定され、この変速比に基づく速度でトラクタが走行する。
【0036】
前述したように変速ECU6には、このトラクタを一定速度で走行させる定速モードを有する。この目的のために、変速ECU6は、前述したように入力信号処理部61、変速制御部62、定速走行管理部63、記憶部64、エンジン負荷判定部65を含んでいる。変速制御部62は、入力信号処理部61を通じて入力された変速ペダル30の操作量に基づいて油圧制御ユニット7に出力する斜板角制御指令を生成する。定速走行に関しては、変速制御部62は、定速走行管理部63から与えられる移行指令に基づいて、変速制御を定速モードに設定し、離脱指令に基づいて定速モードを解除して変速制御を通常モードに設定する。さらに、変速制御部62は、定速走行管理部63から与えられた、定速モード時に定速走行速度を増減させる変更指令に基づいて変速値を変更し、その変速値に対応する斜板角制御指令を油圧制御ユニット7に出力するとともに、この変更された変速値は記憶部64に記憶される。車両キースイッチ95のON時には記憶部64がクリアされるので、最初に通常モードから定速モードに移行した時には、その時の通常モードでの変速値がそのまま定速走行時に車両速度として利用され、当該変速値が記憶部64に記憶される。但し、離脱指令に基づく定速モードからの離脱や、変速ペダル30やブレーキペダル31の操作による定速モードの解除の際には、記憶部64はクリアされないので、再び定速モードに移行した場合には、記憶部64に記憶されている変速値、つまり前回の定速走行時に車両速度が再現される。
【0037】
定速走行管理部63は、定速スイッチ90からの操作信号が表している操作位置情報、つまり第1接点、第2接点、第3接点、第4接点のアクティブ状態に基づいて、増速変更指令、減速変更指令、移行指令、離脱指令のうちのどれかであることを評価して、変速制御部62に与える。
【0038】
エンジン負荷判定部65は、エンジンECU5から送られてくるエンジン負荷情報及び現状の変速値に基づいて、エンジン負荷に余裕があり、変速値にまだ増速方向への斜板角変位に余裕がある場合、省エネ定速走行モードとして車両速度を維持しながら、エンジン回転数の所定量の低下とそれに補償する変速値への変更を実行するための指令を出力する。
一例として、省エネ定速走行モードが実行されると、現状のエンジン回転数を200rpmだけ低下させる回転数低下指令を生成して、エンジンECU5に送り出す。その際、さらに、この回転数低下指令によるエンジン回転数の低下が車速の低下を伴わないように、その低下分を補償する変速値を求め、その変速値に基づいた変更指令を生成し、変速制
御部61に与える。アクセルレバー32の操作位置によって設定された基本エンジン回転数を制御目標としてエンジンECU8がエンジン1の回転数を制御しているが、この回転数低下指令は、その基本エンジン回転数を低下させるものであり、エンジン負荷と斜板角に余裕がある限り、複数回数にわたる回転数低下を指令することができる。
【0039】
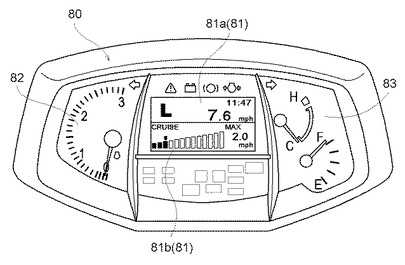
表示ECU8は、運転操作領域に設けられているメータパネル80に組み込まれた、図8に示されている液晶ディスプレイ部81などに各種報知情報を表示するための制御信号を生成する。メータパネル80には、液晶ディスプレイ部81の両側に、エンジン回転数を示す表示領域82や水温値や燃料値を示す表示領域83が配置されている。液晶ディスプレイ部81は、表示モードによって種々の情報が表示可能であるが、本発明に関する表示モードとしての定速走行表示モードでの表示状態が図8に示されている。この定速走行表示モードでは、液晶ディスプレイ部81の上部81aに実際の実走行速度や副変速段(高:H、低:L)が示されており、下部81bに定速スイッチ90によって設定される変速値に基づく設定走行速度が数値とグラフィックの形態で表示される。
【0040】
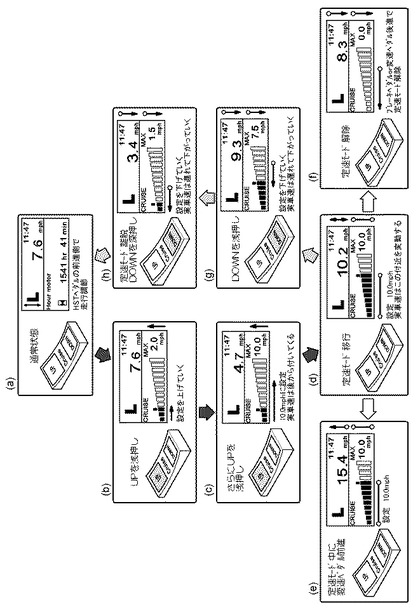
上述したように構成された変速制御システムにおける変速制御状態の遷移を図9の状態遷移図を用いて説明する。
図9(a)・・・この変速状態遷移の出発状態としての通常モード時の変速状態を示している。
図9(b)・・・出発状態で定速スイッチ90のUP押し操作面91を浅押しする(第3接点がアクティブとなる押し操作)。この操作により、液晶ディスプレイ部81の下部81bに設定定速走行速度が表示される。
図9(c)・・・さらにUP押し操作面91の浅押しを繰り返して設定定速走行速度を増加させる。実走行速度は設定定速走行速度に追従してくる。
図9(d)・・・UP押し操作面91の深押しする(第1接点がアクティブとなる押し操作)。この操作により、通常モードから定速モードに移行する。実走行速度は設定定速走行速度の周辺でわずかに変動して、実質的に定速走行状態となる。
図9(e)・・・定速モード時に変速ペダル30を前進増速方向に操作することで、強制的に走行速度を上げる。このペダル操作によって、自動的に定速モードが解除され、通常状態に戻る。その際、変速ペダル30の操作量が定速走行速度に満たない場合には、定速モードが維持される。また、変速ペダル30の操作で走行速度を定速走行速度以上に上げたとしても、変速ペダル30を戻すことにより、定速モードに戻るようにしてもよい。
図9(f)・・・定速モード時に変速ペダル30を後進に操作するか、ブレーキペダル31を踏み込むことで、強制的に走行速度を下げる。これらのペダル操作によって、自動的に定速モードが解除され、通常状態に戻る。
図9(g)・・・定速モード時に、定速スイッチ90のDOWN押し操作面92を浅押しする(第4接点がアクティブとなる押し操作)。この操作により、設定定速走行速度が低下し、実走行速度も遅れて低下する。このDOWN押し操作面92の浅押しを繰り返すことで、さらに設定定速走行速度が低下し、実走行速度も低下する。
図9(h)・・・定速モード時に、定速スイッチ90のDOWN押し操作面92を深押しする(第2接点がアクティブとなる押し操作)。この操作により、変速制御は定速モードから離脱して通常状態に戻る。
【0041】
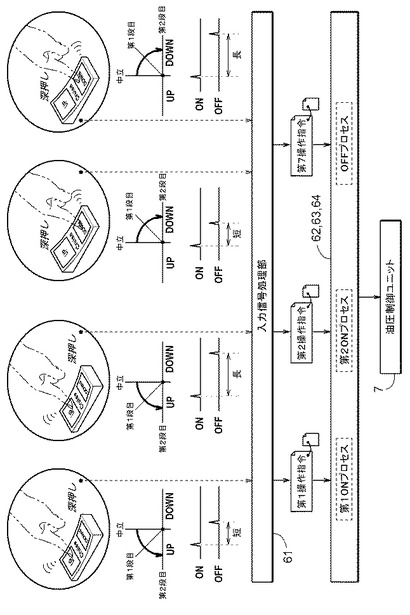
上述した本発明の変速制御システムをさらに拡張した変速制御システムの定速モード走行制御の流れを図10、図11、図12、図13の模式図を用いて以下に説明する。
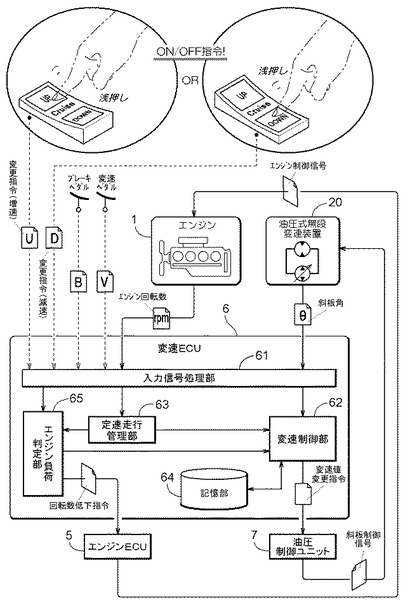
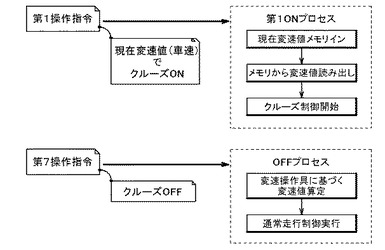
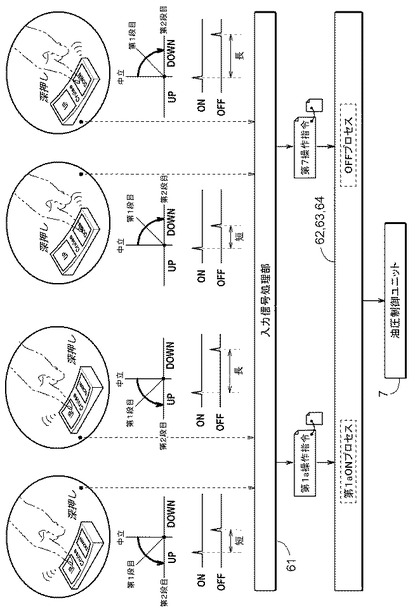
このシステムでは、定速走行操作手段としてのシーソー型定速スイッチ90が左(UP)揺動及び右(DOWN)揺動の両揺動方向において第1段目(浅押し)と第2段目(深押し)とで個別スイッチ状態を示す操作信号を出力するだけでなく、このスイッチ状態は、入力信号処理部61による操作信号の評価により、各スイッチのON時間の長さによりさらに2つの状態に区別される。つまり、図10に示すように、UP側の短時間の深押しで第1操作指令、UP側の長時間の深押しで第2操作指令、UP側の短時間の浅押しで第3操作指令、UP側の長時間の浅押しで第4操作指令、DOWN側の短時間の浅押しで第5操作指令、DOWN側の長時間の浅押しで第6操作指令、DOWN側の長時間または短時間(つまりON時間に無関係)の深押しで第7操作指令が作りだされる。
【0042】
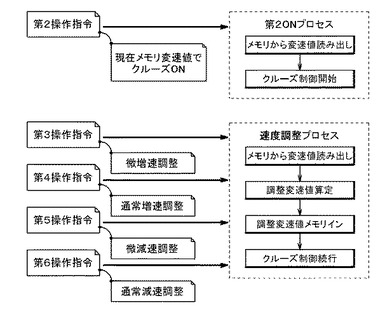
各操作指令には、この実施形態においては、以下のような定速制御(クルーズ制御またはクルーズ走行制御とも称する)に関する制御内容が割り当てられている。第1操作指令には、現在操向している車速での定速度走行であるクルーズ制御に移行する(クルーズON)制御内容が割り当てられる。ここでは、車速そのものではなく、この車速を作り出している変速値が取り扱われる。第2操作指令には、現在記憶部64に記憶されている変速値(メモリ変速値)による車速でクルーズ制御に移行する制御内容が割り当てられる。つまり、第1操作指令及び第2操作指令は、クルーズ制御を開始させる指令である。第3操作指令には、現在のクルーズ走行速度に対して微小速度値、例えば0.5〜1km/h程度だけ増速させる制御内容である。第4操作指令には、現在のクルーズ走行速度に対して所定速度値、例えば2から5km/h程度だけ増速させる制御内容である。第5操作指令には、現在のクルーズ走行速度に対して微小速度値、例えば0.5〜1km/h程度だけ減速させる制御内容である。第6操作指令には、現在のクルーズ走行速度(定速モード変速値に対応する)に対して所定速度値、例えば2から5km/h程度だけ減速させる制御内容である。つまり、第3〜第6操作指令は、クルーズ走行速度を増減させる速度調整指令である。第7操作指令には、実行しているクルーズ走行制御を中止し(クルーズOFF)、再び変速操作具の一例である変速ペダル30に基づいて走行速度がリアルタイムで調整される通常走行に移行させる制御内容である。つまり、第7操作指令は、クルーズ走行から通常走行への移行指令である。
【0043】
上述したような操作指令が入力されると、変速ECU6に構築されている、変速制御部62、定速走行管理部63、記憶部64などの動作を通じて、図12と図13に示すような、以下のようなプロセスが行われ、制御情報を油圧制御ユニット7に出力する。第1操作指令が入力されると、現在の変速値が記憶部64に記憶され(メモリイン)、記憶部64から変速値が読み出され、この読み出された変速値(ここでは現在用いられている変速値である)でのクルーズ走行制御を開始する、第1ONプロセスが実行される。第2操作指令が入力されると、以前に記憶されている記憶部64から変速値が読み出され、この読み出された変速値でのクルーズ走行制御を開始する、第2ONプロセスが実行される。
【0044】
第4から第6までの操作指令が入力されると、記憶部64から変速値が読み出され、各操作指令に割り当てられている速度調整情報に基づいて調整された変速値(調整変速値)を算定され、この算定された調整変速値を新たな変速値として記憶部64に記憶し、この算定された調整変速値でのクルーズ走行制御を開始する、クルーズ走行での速度調整プロセスが実行される。第7操作指令が入力されると、現状の変速ペダル30の操作位置に基づく変速値を算定され、この算定された変速値でのクルーズ走行制御を開始する、OFFプロセスが実行される。
【0045】
なお、この変形例では、4つの操作位置と、ON時間評価によって8つのスイッチ状態を作り出し、それぞれに制御内容を割り当てたが、その割り当て方は一例であり、本発明においてその他の割り当て方を採用することができる。また、その他のスイッチ状態の作り出しも自由である。
【0046】
先の実施形態では、車両キースイッチがONされたとき、または車両キースイッチがOFFされたときには、記憶部64の内容がクリアされるとしたが、一度記憶された記憶部64の内容は上書きしない限り、原則としてクリアされないように構成してもよい。
【0047】
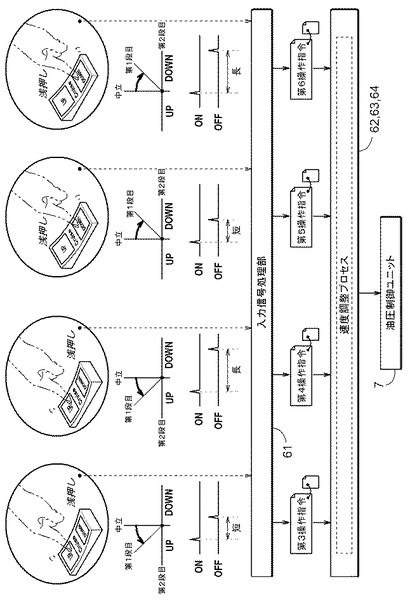
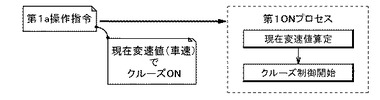
次に、図10、図11、図12、図13を用いて説明した変速制御システムから変速値記憶機能を省いた変速制御システムを説明する。この簡単化されたシステムにおける定速モード走行制御の流れを図14と図15の模式図を用いて以下に説明する。なお、先の変速制御システムと重複する機能の説明は省略する。このシステムにおける定速走行操作手段としてのシーソー型定速スイッチ90に対する運転者の操作を通じて、図14に示すように、UP側の長時間または短時間(つまりON時間に無関係)の深押しで第1a操作指令が作りだされる。第7操作指令、及び図11に示されている第3操作指令、第4操作指令、第5操作指令、第6操作指令も同様に作り出され、その操作指令に基づくプロセスも同様である。
【0048】
第1a操作指令はクルーズ制御を開始させる指令であり、第1a操作指令に割り当てられている制御内容は、現在操向している車速、つまり現状の変速値での定速度走行であるクルーズ制御に移行する(クルーズON)制御内容が割り当てられる。つまり、この変速制御システムでは、変速値を記憶する記憶部64が省かれているので、通常走行から定速度走行(クルーズ走行)への移行時は常にその時点での変速値が用いられる。従って、定速度走行に移行する前の走行速度が定速度走行で運転者の希望する定速度走行でない場合は、図11で示すような第3操作指令、第4操作指令、第5操作指令、第6操作指令を用いて、クルーズ走行での速度調整プロセスを実行する。
【0049】
上述した実施形態における定速制御(クルーズ制御)の説明では、説明の簡単化のために副変速装置24の存在を無視していたが、この副変速装置24の変速状態を考慮することも可能である。例えば、副変速装置24に、高速段、中速段、低速段の3つが用意されているとすれば、記憶部64を各副変速段別に変速値を記憶するように構成し、各副変速段別に定速制御(クルーズ制御)を実行することができる。
【0050】
〔その他の別実施形態〕
(1)上述した実施形態では定速走行操作手段として、シーソー形スイッチを採用していたが、スライドスイッチやロータリスイッチなど、本発明の機能を満足する限りにおいて、種々の形態のスイッチを採用することができる。
(2)前記変速ECU6における各機能部は、説明の都合に合わせて区分けされており、それらの機能部の統合や分割は自在である。例えば、変速制御部62と定速走行管理部63とを統合してもよい。
(3)上述した実施の形態では、無段変速装置として、HST及びHSTを内蔵したHMTが採用されていたが、これに代えてCVTなどが用いられても、本発明を同様に適用することができる。
(4)上述した実施の形態では、車両としてトラクタに変速制御システムを採用した例を示したが、田植機やコンバインや芝刈機やバックホウなどの他の作業車、乗用車、トラックなどにおいても、本発明を同様に適用することができる。
【産業上の利用可能性】
【0051】
本発明は、車両を一定速度で走行させる定速走行(クルーズ走行)を行う変速制御システムに利用することができる。
【符号の説明】
【0052】
1:エンジン
6:変速ECU
61:入力信号処理部
62:変速制御部
63:定速走行管理部
64:記憶部
65:エンジン負荷判定部
20:油圧式無段変速装置(無段変速装置)
21:HST
30:変速ペダル(変速操作具)
90:定速スイッチ(定速走行操作器、定速走行操作手段)
95:車両キースイッチ
【技術分野】
【0001】
本発明は、エンジンからの回転動力を無段変速して出力する無段変速装置を備えた車両を一定速度で走行させる定速モードを有する変速制御システムに関する。
【背景技術】
【0002】
車両を一定速度で走行させる定速モードはクルーディングモードとも呼ばれるが、トラクタなどの作業車両が一定速度で走行しながら耕耘や整地などの作業を行うときに用いられる。この定速モードを用いることにより、運転者は、車両速度調整の煩わしさから解放される。このような定速モードを有する作業車両が特許文献1に記載されている。この作業車両は、無段変速装置として静油圧式無段変速装置(以下HSTと略称する)を搭載し、油圧ポンプの斜板角を設定された所定角度に保持することで定速走行を実現している。このため、油圧ポンプの斜板角を操作する変速制御手段に対して変速値としての斜板目標操作位置を設定する操作具として、変速ペダルと摩擦式の位置保持具が備えられている定速レバーが備えられている。定速レバーによって設定される斜板目標操作位置と変速ペダルによって設定される斜板目標操作位置との間でその対応する車両速度が大きい方の斜板目標操作位置が実際のHSTの変速値となる。従って、例えば、定速レバーによって設定される斜板目標操作位置をゼロ速度に設定しておけば、変速ペダルの操作量に応じてHSTが変速され、所望の車両速度を得ることができる。定速レバーを所望の定速走行速度が得られる操作位置に保持しておくと、変速ペダルによる斜板目標操作位置が定速レバーによる斜板目標操作位置より低い位置にあれば(この状態は変速ペダルから足を外してフリーにしておくことで容易に実現する)、その所望の定速走行速度で車両を定速走行させることができる。
しかしながら、摩擦保持される定速レバーを用いた定速モード制御では、摩擦力が邪魔をして、正確な定速車両速度の設定が難しい。特に、低速レバーをゼロ速度まで下げて定速モードを解除した後、再び先と同じ速度での定速モードを設定することは困難である。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2008‐37400号公報(段落番号〔0027−0087〕、図6)
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記実情に鑑み、本発明の課題は、簡単な操作で所望の定速走行が実現する車両用変速制御システムを簡単な構成で提供することである。
【課題を解決するための手段】
【0005】
上記課題を解決するため、本発明による、車両を一定速度で走行させる定速モードを有する1つの変速制御システムは、エンジンからの回転動力を無段変速して出力する無段変速装置と、前記無段変速装置の変速値を設定する変速制御部と、前記無段変速装置に対する変速指令を前記変速制御部に与える変速操作具と、定速モードによる走行を前記変速制御部に実行させる定速走行管理部と、前記定速モードに関する操作指令として、前記変速操作具に基づく現在変速値を前記定速モード変速値として用いて前記定速モードに移行させる第1操作指令と、前記定速モードからの離脱を指令する離脱指令を、前記変速制御部に与える定速走行操作手段とを備えている。
【0006】
この構成では、定速走行操作手段によって通常走行の車両を定速走行させる定速モードへの移行及び定速モードから通常走行への復帰を指令するとともに、当該定速モードのための車両速度を決定する変速値を調整することができる。従って、定速モードでの走行中においても、運転者の所望の走行速度に調整することが簡単に実現できる。その際、定速走行操作手段を単一の定速走行操作器で構成すれば、変速制御システム構成が簡素化される。
【0007】
上記課題を解決するため、本発明による、車両を一定速度で走行させる定速モードを有する他の1つの変速制御システムは、エンジンからの回転動力を無段変速して出力する無段変速装置と、前記無段変速装置の変速値を設定する変速制御部と、前記無段変速装置に対する変速指令を前記変速制御部に与える変速操作具と、前記変速制御部に対して、定速モード時の変速値である定速モード変速値を変更する変更指令、前記定速モードへの移行を指令する移行指令、前記定速モードからの離脱を指令する離脱指令を与える定速走行操作手段と、前記定速走行操作手段によって設定された定速モード変速値を記憶する記憶部と、前記定速走行操作手段による前記移行指令に基づいて前記記憶部から読み込んだ定速モード変速値での定速モードを前記変速制御部に実行させる定速走行管理部とを備えている。
【0008】
この構成では、定速走行操作手段によって車両を定速走行させる定速モードへの移行を指令するとともに当該定速モードのための車両速度を決定する変速値を調整することができる。さらに、定速モード時に設定された定速モード変速値は記憶部に記憶されるように構成されており、一旦定速モードから離脱して再び定速モードへ移行した時には、記憶部から読み出された定速モード変速値が用いられるので、前回と同じ車両速度で車両を定速走行させることができる。
【0009】
本発明の好適な実施形態の1つでは、前記定速走行操作手段が単一の定速走行操作器で構成され、前記定速走行操作器は、所定変速値単位の変更指令を与える変更操作位置と、前記変速制御部に前記定速モードへの移行を指令する移行操作位置と、前記定速モードからの離脱を指令する離脱操作位置とを有する。単一の定速走行操作器に対する操作で、定速モードへの移行及び定速モードからの離脱が行われるだけではなく、無段変速装置の変速値の変更、つまり定速走行時の車両速度の調整も可能であるので、操作が簡単となるだけでなく、制御入力信号系の配線も単純となる。
【0010】
そのような定速走行操作器のより具体的で好適な形態の1つでは、前記定速走行操作器は、付勢保持される中立位置を基点とした一方方向と他方方向の操作変位が可能であり、一方方向での終端操作変位位置が前記移行操作位置であり、他方方向での終端操作変位位置が前記離脱操作位置であり、一方方向及び他方方向での終端操作変位位置までの単位操作変位位置が前記変更操作位置となっている。つまり、基点からの2つの操作方向と各操作方向での2つの操作位置(操作深さ)に、定速モードへの移行、定速モードからの離脱、定速モードにおける車両速度の増減調整を割り当てることができる。例えば、2段階シーソー型のスイッチを採用するなら、一方方向の浅押しで定速走行速度の上昇、一方方向の深押しで定速モードへの移行、他方方向の浅押しで定速走行速度の下降、他方方向の一方方向の深押しで定速モードからの離脱を実現することができる。
【0011】
本発明では、定速モードおける車両速度を決定する変速値が記憶部に記憶されるが、作業種別や走行地面状態などによって定速走行速度は異なるのが一般的である。従って、1つの作業が完了した時点で記憶部をクリアしておき、新たな作業において所定の走行速度を得たときに定速モードに移行して、その時の変速値を記憶することが好適である。このことを考慮して、本発明の好適な実施形態の1つでは、車両キースイッチON時に前記記憶部がクリアされ、前記記憶部がクリア状態の場合、変速制御部は前記定速モード変速値として前記変速操作具による変速指令に基づく変速値を用いるように構成されている。
【0012】
定速走行はエンジン回転数を一定にするとともに、変速値も一定として、車両速度を一定するものであり、ある程度長時間の走行状態となる。定速走行作業にはエンジン負荷が小さい作業や大きい作業が含まれている。また、同じ作業でも作業環境によってはエンジン負荷が変動する。エンジン負荷が小さいとき、つまりエンジンに余裕があるときには、エンジン回転数を低下させ、その分だけ変速値を速度増加側に調整することで、同一車両速度が得られるようにすると燃費がよくなる。このことを考慮して、本発明の好適な実施形態の1つでは、エンジン負荷に余裕がある低負荷を判定するエンジン負荷判定部が備えられ、前記定速モード時において前記低負荷が判定された場合、エンジン回転数を所定量だけ低減させるとともに、車両速度を維持するために当該回転数低下指令によるエンジン回転数の低下を補償するように前記変速値を変更する。これにより、省エネルギ定速走行が実現する。
【0013】
定速モードへの移行時に実行される速度に自由度を与えるための、好適な実施形態の一例では、前記定速走行操作手段による移行指令には、前記変速操作具に基づく現在変速値を前記定速モード変速値として用いて前記定速モードに移行させる第1操作指令と、前記記憶部から読み込んだ定速モード変速値を用いて前記定速モードに移行させる第2操作指令とが含まれている。
また、定速モード時に任意に定速モード時車速を調整するための簡単な構成として、本発明の好適な実施形態の1つでは、前記定速走行操作手段による変更指令には、前記定速モード変速値の微増速調整を実行する微増速調整指令と、前記微増速調整より大きな増速をもたらす通常増速調整を実行する通常増速調整指令と、前記定速モード変速値の微減速調整を実行する微減速調整指令と、前記微減速調整より大きな減速をもたらす通常減速調整を実行する通常減速調整指令とが含まれている。
【0014】
本発明には上述した本発明の特徴を変形させた変速制御システムも含まれる。例えば、そのような本発明による、車両を一定速度で走行させる定速モードを有する変速制御システムの1つでは、エンジンからの回転動力を無段変速して出力する無段変速装置と、前記無段変速装置の変速値を設定する変速制御部と、前記無段変速装置に対する変速指令を前記変速制御部に与える変速操作具と、定速モードによる走行を前記変速制御部に実行させる定速走行管理部と、前記定速モード時の変速値である定速モード変速値を記憶する記憶部と、前記定速モードに関する操作指令として、前記変速操作具に基づく現在変速値を前記定速モード変速値として用いて前記定速モードに移行させる第1操作指令と、前記記憶部から読み込んだ定速モード変速値を用いて前記定速モードに移行させる第2操作指令と、前記定速モードからの離脱を指令する離脱指令を、前記変速制御部に与える定速走行操作手段とが備えられている。この構成でも、簡単な操作で自由度の高い所望の定速走行制御が実現する。
【0015】
さらに、簡単な操作で自由度の高い定速走行制御を実現するために、前記定速走行操作手段は、前記定速モード変速値の微増速調整を実行する第3操作指令と、前記微増速調整より大きな増速をもたらす通常増速調整を実行する第4操作指令と、前記定速モード変速値の微減速調整を実行する第5操作指令と、前記微減速調整より大きな減速をもたらす通常減速調整を実行する第6操作指令とを前記変速制御部に与えるように構成することができる。その際、前記定速走行操作手段の構成を簡単化するためには、少なくとも7つの操作状態を評価させることができる単一の定速走行操作器で構成するとよい。例えば、前記定速走行操作器は4つの操作スイッチ位置を有し、前記各操作スイッチ位置において少なくとも2段階の操作時間が評価されるような構成が好都合である。より具体的な好適実施形態としての前記定速走行操作器は、付勢保持される中立位置を基点とした一方方向で2段階の操作位置及び他方方向で2段階の操作位置が作り出されるシーソー型スイッチである。
【0016】
上述したように車両キースイッチON時またはOFF時に前記記憶部がクリアされる場合、変速制御部は前記定速モード変速値として前記変速操作具による変速指令に基づく変速値を用いるように構成してもよいが、これに代えて、前記記憶部が車両キースイッチOFF時にその内容がクリアされない不揮発性メモリから構成され、前記記憶部に記憶された定速モード変速値は書き換えられるまで維持されるような構成を採用してもよい。これにより、作業者が意識して定速モード変速値を書き変えない限り、常に同じ定速モード変速値、つまり同じ車速での作業が可能となる。
【図面の簡単な説明】
【0017】
【図1】本発明の変速制御システムにおける定速モードへの移行と定速モードからの離脱の制御の流れを図解する模式図である。
【図2】発明の変速制御システムにおける定速モード時の車両速度の増減制御の流れを図解する模式図である。
【図3】本発明の変速制御システムを導入した作業車両の一例としてのトラクタの外観図である。
【図4】図3のトラクタの運転操作部の運転席からみた斜視図である。
【図5】トラクタのパワートレインと変速制御系統の一例を示すブロック図である。
【図6】変速制御系の機能ブロック図である。
【図7】変速ECUの機能ブロック図である。
【図8】定速モード状態を表示する計器パネルの平面図である。
【図9】変速制御状態の移り変わりを示す状態遷移図である。
【図10】本発明の変速制御システムの別実施形態の定速モード走行制御の流れをしめす模式図である。
【図11】本発明の変速制御システムの別実施形態の定速モード走行制御の流れをしめす模式図である。
【図12】図10の定速モード走行制御の流れを補足する模式図である。
【図13】図11の定速モード走行制御の流れを補足する模式図である。
【図14】本発明の変速制御システムのさらに別な実施形態の定速モード走行制御の流れをしめす模式図である。
【図15】図14の定速モード走行制御の流れを補足する模式図である。
【発明を実施するための形態】
【0018】
以下、本発明の実施の形態を具体的に説明する前に、本発明の変速制御システムによる定速車両走行を実現する定速モード制御の基本原理を図1と図2とを用いて説明する。図1は定速モードへの移行と定速モードからの離脱の制御の流れを図解する模式図であり、図2は定速モード時の車両速度の増減制御の流れを図解する模式図である。ここでは、無段変速装置としてHSTやHMTなどの油圧式無段変速装置20が用いられている。変速操作具は変速ペダルとして構成されている。
【0019】
定速走行操作手段は、所定変速値単位の変更指令を与える変更操作位置と、変速ECU6に定速モードへの移行を指令する移行操作位置と、定速モードからの離脱を指令する離脱操作位置とを有する、単一の定速走行操作器であるシーソー形スイッチ90(以下定速スイッチと称する)で構成されている。この定速スイッチ90は、バネ等により付勢保持される中立位置を基点とした一方方向(反時計方向)と他方方向(時計方向)の操作変位(揺動変位)が可能である。一方方向への操作変位を行う押し操作面には「UP」が記されており、他方方向への操作変位を行う押し操作面には「DOWN」が記されている。一方方向での終端操作変位位置が移行操作位置であり、この位置まで深押しすることにより、第1接点がアクティブとなる。第1接点がアクティブとなることにより、ON信号が変速ECU6に与えられる。このON信号は定速モードへの移行を要求する移行指令として取り扱われる。他方方向での終端操作変位位置が離脱操作位置であり、この位置まで深押しすることにより、第2接点がアクティブとなる。第2接点がアクティブとなることにより、OFF信号が変速ECU6に与えられる。このOFF信号は定速モードからの離脱を要求する離脱指令として取り扱われる。
【0020】
この定速スイッチ90は、それぞれの操作(押し)方向において、2段階スイッチとして構成されている。つまり、一方方向での終端操作変位位置と中立位置との間に設定されている増速用変更操作位置に第3接点が形成されており、同様に他方方向での終端操作変位位置と中立位置との間に設定されている減速用変更操作位置に第4接点が設定されている。さらに、増速用変更操作位置及び終端操作変位位置において、クリック感が生じるように構成されている。この構成により、図2で示しているように、定速スイッチ90の「UP」押し操作面を用いて増速用変更操作位置まで浅押しすることで第3接点がアクティブとなり、増速のための変更指令が変速ECU6に与えられる。この変更指令は単位変速位置の増加、例えば時速2kmの増加に対応する変速値調整(斜板角調整)をもたらす。従って、増速用変更操作位置までの浅押しを繰り返すと、斜板角度の利用範囲内で、その繰り返し分の速度増加が実現する。また、定速スイッチ90の「DOWN」押し操作面を用いて減速用変更操作位置まで浅押しすることで第4接点がアクティブとなり、減速のための変更指令が変速ECU6に与えられる。この変更指令は単位変速位置の減少、例えば時速2kmの減速に対応する変速値調整(斜板角調整)をもたらす。従って、減速用変更操作位置までの浅押しを繰り返すと、斜板角度ゼロまでの範囲内で、その繰り返し分の速度低下が実現する。
【0021】
変速ECU6には、各種指令や信号を受け取って、内部の各機能部に転送する入力信号処理部61が備えられている。変速制御部62は所望の変速を実現するために、油圧式無段変速装置20の斜板角を制御する油圧制御ユニットに変速値変更指令を与える。定速走行管理部63は、移行指令を受けて変速制御部62に対して定速モードへの移行を要求し、離脱指令を受けて定速モードからの離脱を要求する。変速制御部62は移行指令を受け取った場合、定速モードにおける定速走行の速度を設定する。その際、記憶部64に変速値が記憶されている場合には、その変速値を用いて油圧式無段変速装置20の変速を行う。記憶部64に変速値が記憶されている場合には、現状の油圧式無段変速装置20の変速値を定速走行の速度設定のために用い、当該変速値を記憶部64に記憶する。
【0022】
図2から理解できるように、定速スイッチ90から増速の変更指令が変速ECU6に送られると、定速走行管理部63は変速制御部62に単位変速値分の変速値変更(速度増速)を依頼する。また、定速スイッチ90から減速の変更指令が変速ECU6に送られると、定速走行管理部63は変速制御部62に単位変速値分の変速値変更(速度減速)を依頼する。変速制御部62は変速値変更指令を油圧制御ユニット7に与えると、その新規変速値を記憶部64に記憶させる。従って、記憶部64にはその時点で定速走行している際の変速値が記憶されることになる。なお、記憶部64に記憶される変速値は、車両速度に対応する値であり、必ずしも実際の変速比などを示す値でなくてもよい。油圧式無段変速装置20を通じて車両速度を決定するために用いられる指標であればよい。また、図1や図2では図示されていないが、車両キースイッチがONされたとき、または車両キースイッチがOFFされたときには、記憶部64の内容がクリアされる。
【0023】
定速モードからの離脱は、定速スイッチ90からの離脱指令以外に、変速ペダルを通じて定速走行の車両速度を増速する操作がなされた時や、ブレーキペダルを通じて定速走行の車両速度を増速する操作がなされた時にも、変速制御部62に離脱指令が与えられる。つまり、変速ペダルやブレーキペダルの操作は、定速スイッチ90の操作に優先するようになっている。
【0024】
エンジン負荷判定部65は、エンジンECU5からのエンジン負荷情報と予め設定された判定条件に基づいてエンジン負荷に余裕がある低負荷を判定する。定速モード時において低負荷が判定された場合、エンジン回転数を所定量だけ低減させるとともに、車両速度を維持するために当該回転数低下指令によるエンジン回転数の低下を補償するような変速値を変速制御部62に与える。
【0025】
次に、本発明の実施の形態を具体的に説明する。この実施の形態では、本発明の変速制御システムはトラクタに組み込まれている。このトラクタは、無段変速装置としてHMT(油圧機械式無段変速装置)20が用いられており、ここでも変速操作具は変速ペダル30として構成され、定速走行操作手段は、上述したような定速スイッチ90として構成されている。図3はトラクタの外観図であり、図4はトラクタの運転部の運転席からみた斜視図であり、図5トラクタのパワートレインと変速制御系統の一例を示すブロック図である。
【0026】
このトラクタは、駆動輪3によって支持された機体の後部に、ここでは耕耘装置である外部作業機4を装備している。機体の前部に配置されているエンジン1はコモンレール方式で回転制御される形式のディーゼルエンジン1である。エンジン1の出力軸10からの動力は、HMT20と前後進切換装置23と複数段(ここでは高低2段)の変速を行う副変速装置24とを通じて変速出力軸11に伝達され、最終的に駆動輪(前輪または後輪あるいはその両方)3を回転させる。さらに、このエンジン1の出力軸10からの分岐動力はPTO伝動系12を経てトラクタに装備されている耕耘作業機などの外部作業機4にも伝達される。
【0027】
HMT20は、エンジン1の出力軸10からの動力を受ける斜板式可変吐出型油圧ポンプと当該油圧ポンプからの油圧によって回転して動力を出力する油圧モータとからなるHST(静油圧式変速装置)21と、遊星歯車機構22とか構成されている。遊星歯車機構22は、エンジン1の出力軸10からの動力と油圧モータからの動力とを入力として、その変速出力を前後進切換装置23に供給するように構成されている。HST21は単独でも油圧式無段変速装置20として機能可能である。
【0028】
このHST21では、エンジン1からの動力がポンプ軸に入力されることにより、油圧ポンプから油圧モータに圧油が供給され、油圧モータが油圧ポンプからの油圧によって回転駆動されてモータ軸を回転させる。油圧モータの回転はモータ軸を通じて遊星歯車機構22に伝達される。HST21は、油圧ポンプの斜板に連動されているシリンダを変位させることにより、この斜板の角度変更が行なわれ、正回転状態、逆回転状態、及び正回転状態と逆回転状態の間に位置する中立状態に変速され、かつ正回転状態に変速された場合においても逆回転状態に変速された場合においても、油圧ポンプの回転速度を無段階に変更して油圧モータの回転速度(時間当たり回転数)を無段階に変更する。その結果、油圧モータから遊星歯車機構22に出力する動力の回転速度を無段階に変更する。HST21は、斜板が中立状態に位置されることで、油圧ポンプによる油圧モータの回転を停止、結果的には油圧モータから遊星歯車機構22に対する出力を停止する。
【0029】
遊星歯車機構22は、サンギヤと、当該サンギヤの周囲に等間隔で分散して配置された3個の遊星ギヤと、各遊星ギヤを回転自在に支持するキャリヤと、3個の遊星ギヤに噛合うリングギヤと、前後進切換装置23に連結している出力軸11とを備えている。なお、この実施形態では、キャリヤは外周にエンジン1の出力軸10に取り付けられた出力ギヤと噛み合うギヤ部を形成しているとともに、サンギヤのボス部に相対回転自在に支持されている。
【0030】
上述した構成により、このHMT20は、HST21の斜板角度を変更することにより、駆動輪3への動力伝達を、無段階で変速することができる。この斜板制御は、変速ECU6からの制御指令に基づいて動作する油圧制御ユニット7の油圧制御によって実現する。運転者がこの変速ペダル30を踏み込むことによって生じる操作量(ここでは揺動角度)を検出信号として生成するペダルセンサ96も設けられている。ペダルセンサ96は、例えばポテンショメータなどにより構成される。変速ペダル30の近傍には左右輪用のブレーキペダル31が配置されている。また、運転部には、エンジン回転数を調整するためのアクセルレバー32と当該アクセルレバー32の操作位置を検出して操作信号を生成するレバーセンサ93が備えられている。
【0031】
「UP」押し操作面91と「DOWN」押し操作面92を有するシーソー形定速スイッチ90は、この実施形態では図4に示されているように、後輪フェンダの上部を覆う左側サイドパネル上に設けられているが、右側のサイドパネルやステアリングハンドルやハンドル前方のフロントパネルなどに設けてもよい。
【0032】
この変速制御システムの制御系は、エンジンECU(エンジン制御ユニット)5、変速ECU(変速制御ユニット)6、油圧制御ユニット7、表示ECU8、車両状態検出ECU9、外部作業機ECU40などから構成され、それぞれは車載LANによってデータ伝送可能に接続されている。
【0033】
車両状態検出ECU9は、トラクタに配備されている種々のセンサからの信号や、運転者によって操作される操作器の状態を示す操作入力信号を入力し、必要に応じて信号変換や評価演算を行い、得られた信号やデータを車載LANに送り出す。この車両状態検出E
CU9に入力される信号のうち、特に本発明に関係するものとしては、定速スイッチ90からの操作位置信号、変速ペダル30の操作量を検出するペダルセンサ96からの信号、トラクタ車速の演算にも用いることができる変速出力軸11の回転速度(回転数)を検出する回転センサ(又は車速センサ)94からの信号、アクセルレバー32の操作量を検出するアクセルセンサ93からの信号、車両キースイッチ95からの信号などが挙げられる。
【0034】
エンジンECU5は、よく知られているように、エンジン1を電子制御するための中核機能部であり、外部操作入力信号及び内部センサ信号等によって推定されるエンジン1の運転状態に応じて、予め設定されているプログラムに基づく制御、例えば定回転数制御や定トルク制御など種々のタイプのエンジン制御を行う。外部作業機ECU40は、外部作業機4を制御するための制御信号を生成する。
【0035】
図6または図7に示すように、変速ECU6は、変速ペダル30の操作量や定速スイッチ90の操作状態等に基づいてHMT20の変速比を設定する変速値を演算し、油圧制御ユニット7を介してHMT20のHST斜板角を油圧制御する。これにより、HMT20の変速比が決定され、この変速比に基づく速度でトラクタが走行する。
【0036】
前述したように変速ECU6には、このトラクタを一定速度で走行させる定速モードを有する。この目的のために、変速ECU6は、前述したように入力信号処理部61、変速制御部62、定速走行管理部63、記憶部64、エンジン負荷判定部65を含んでいる。変速制御部62は、入力信号処理部61を通じて入力された変速ペダル30の操作量に基づいて油圧制御ユニット7に出力する斜板角制御指令を生成する。定速走行に関しては、変速制御部62は、定速走行管理部63から与えられる移行指令に基づいて、変速制御を定速モードに設定し、離脱指令に基づいて定速モードを解除して変速制御を通常モードに設定する。さらに、変速制御部62は、定速走行管理部63から与えられた、定速モード時に定速走行速度を増減させる変更指令に基づいて変速値を変更し、その変速値に対応する斜板角制御指令を油圧制御ユニット7に出力するとともに、この変更された変速値は記憶部64に記憶される。車両キースイッチ95のON時には記憶部64がクリアされるので、最初に通常モードから定速モードに移行した時には、その時の通常モードでの変速値がそのまま定速走行時に車両速度として利用され、当該変速値が記憶部64に記憶される。但し、離脱指令に基づく定速モードからの離脱や、変速ペダル30やブレーキペダル31の操作による定速モードの解除の際には、記憶部64はクリアされないので、再び定速モードに移行した場合には、記憶部64に記憶されている変速値、つまり前回の定速走行時に車両速度が再現される。
【0037】
定速走行管理部63は、定速スイッチ90からの操作信号が表している操作位置情報、つまり第1接点、第2接点、第3接点、第4接点のアクティブ状態に基づいて、増速変更指令、減速変更指令、移行指令、離脱指令のうちのどれかであることを評価して、変速制御部62に与える。
【0038】
エンジン負荷判定部65は、エンジンECU5から送られてくるエンジン負荷情報及び現状の変速値に基づいて、エンジン負荷に余裕があり、変速値にまだ増速方向への斜板角変位に余裕がある場合、省エネ定速走行モードとして車両速度を維持しながら、エンジン回転数の所定量の低下とそれに補償する変速値への変更を実行するための指令を出力する。
一例として、省エネ定速走行モードが実行されると、現状のエンジン回転数を200rpmだけ低下させる回転数低下指令を生成して、エンジンECU5に送り出す。その際、さらに、この回転数低下指令によるエンジン回転数の低下が車速の低下を伴わないように、その低下分を補償する変速値を求め、その変速値に基づいた変更指令を生成し、変速制
御部61に与える。アクセルレバー32の操作位置によって設定された基本エンジン回転数を制御目標としてエンジンECU8がエンジン1の回転数を制御しているが、この回転数低下指令は、その基本エンジン回転数を低下させるものであり、エンジン負荷と斜板角に余裕がある限り、複数回数にわたる回転数低下を指令することができる。
【0039】
表示ECU8は、運転操作領域に設けられているメータパネル80に組み込まれた、図8に示されている液晶ディスプレイ部81などに各種報知情報を表示するための制御信号を生成する。メータパネル80には、液晶ディスプレイ部81の両側に、エンジン回転数を示す表示領域82や水温値や燃料値を示す表示領域83が配置されている。液晶ディスプレイ部81は、表示モードによって種々の情報が表示可能であるが、本発明に関する表示モードとしての定速走行表示モードでの表示状態が図8に示されている。この定速走行表示モードでは、液晶ディスプレイ部81の上部81aに実際の実走行速度や副変速段(高:H、低:L)が示されており、下部81bに定速スイッチ90によって設定される変速値に基づく設定走行速度が数値とグラフィックの形態で表示される。
【0040】
上述したように構成された変速制御システムにおける変速制御状態の遷移を図9の状態遷移図を用いて説明する。
図9(a)・・・この変速状態遷移の出発状態としての通常モード時の変速状態を示している。
図9(b)・・・出発状態で定速スイッチ90のUP押し操作面91を浅押しする(第3接点がアクティブとなる押し操作)。この操作により、液晶ディスプレイ部81の下部81bに設定定速走行速度が表示される。
図9(c)・・・さらにUP押し操作面91の浅押しを繰り返して設定定速走行速度を増加させる。実走行速度は設定定速走行速度に追従してくる。
図9(d)・・・UP押し操作面91の深押しする(第1接点がアクティブとなる押し操作)。この操作により、通常モードから定速モードに移行する。実走行速度は設定定速走行速度の周辺でわずかに変動して、実質的に定速走行状態となる。
図9(e)・・・定速モード時に変速ペダル30を前進増速方向に操作することで、強制的に走行速度を上げる。このペダル操作によって、自動的に定速モードが解除され、通常状態に戻る。その際、変速ペダル30の操作量が定速走行速度に満たない場合には、定速モードが維持される。また、変速ペダル30の操作で走行速度を定速走行速度以上に上げたとしても、変速ペダル30を戻すことにより、定速モードに戻るようにしてもよい。
図9(f)・・・定速モード時に変速ペダル30を後進に操作するか、ブレーキペダル31を踏み込むことで、強制的に走行速度を下げる。これらのペダル操作によって、自動的に定速モードが解除され、通常状態に戻る。
図9(g)・・・定速モード時に、定速スイッチ90のDOWN押し操作面92を浅押しする(第4接点がアクティブとなる押し操作)。この操作により、設定定速走行速度が低下し、実走行速度も遅れて低下する。このDOWN押し操作面92の浅押しを繰り返すことで、さらに設定定速走行速度が低下し、実走行速度も低下する。
図9(h)・・・定速モード時に、定速スイッチ90のDOWN押し操作面92を深押しする(第2接点がアクティブとなる押し操作)。この操作により、変速制御は定速モードから離脱して通常状態に戻る。
【0041】
上述した本発明の変速制御システムをさらに拡張した変速制御システムの定速モード走行制御の流れを図10、図11、図12、図13の模式図を用いて以下に説明する。
このシステムでは、定速走行操作手段としてのシーソー型定速スイッチ90が左(UP)揺動及び右(DOWN)揺動の両揺動方向において第1段目(浅押し)と第2段目(深押し)とで個別スイッチ状態を示す操作信号を出力するだけでなく、このスイッチ状態は、入力信号処理部61による操作信号の評価により、各スイッチのON時間の長さによりさらに2つの状態に区別される。つまり、図10に示すように、UP側の短時間の深押しで第1操作指令、UP側の長時間の深押しで第2操作指令、UP側の短時間の浅押しで第3操作指令、UP側の長時間の浅押しで第4操作指令、DOWN側の短時間の浅押しで第5操作指令、DOWN側の長時間の浅押しで第6操作指令、DOWN側の長時間または短時間(つまりON時間に無関係)の深押しで第7操作指令が作りだされる。
【0042】
各操作指令には、この実施形態においては、以下のような定速制御(クルーズ制御またはクルーズ走行制御とも称する)に関する制御内容が割り当てられている。第1操作指令には、現在操向している車速での定速度走行であるクルーズ制御に移行する(クルーズON)制御内容が割り当てられる。ここでは、車速そのものではなく、この車速を作り出している変速値が取り扱われる。第2操作指令には、現在記憶部64に記憶されている変速値(メモリ変速値)による車速でクルーズ制御に移行する制御内容が割り当てられる。つまり、第1操作指令及び第2操作指令は、クルーズ制御を開始させる指令である。第3操作指令には、現在のクルーズ走行速度に対して微小速度値、例えば0.5〜1km/h程度だけ増速させる制御内容である。第4操作指令には、現在のクルーズ走行速度に対して所定速度値、例えば2から5km/h程度だけ増速させる制御内容である。第5操作指令には、現在のクルーズ走行速度に対して微小速度値、例えば0.5〜1km/h程度だけ減速させる制御内容である。第6操作指令には、現在のクルーズ走行速度(定速モード変速値に対応する)に対して所定速度値、例えば2から5km/h程度だけ減速させる制御内容である。つまり、第3〜第6操作指令は、クルーズ走行速度を増減させる速度調整指令である。第7操作指令には、実行しているクルーズ走行制御を中止し(クルーズOFF)、再び変速操作具の一例である変速ペダル30に基づいて走行速度がリアルタイムで調整される通常走行に移行させる制御内容である。つまり、第7操作指令は、クルーズ走行から通常走行への移行指令である。
【0043】
上述したような操作指令が入力されると、変速ECU6に構築されている、変速制御部62、定速走行管理部63、記憶部64などの動作を通じて、図12と図13に示すような、以下のようなプロセスが行われ、制御情報を油圧制御ユニット7に出力する。第1操作指令が入力されると、現在の変速値が記憶部64に記憶され(メモリイン)、記憶部64から変速値が読み出され、この読み出された変速値(ここでは現在用いられている変速値である)でのクルーズ走行制御を開始する、第1ONプロセスが実行される。第2操作指令が入力されると、以前に記憶されている記憶部64から変速値が読み出され、この読み出された変速値でのクルーズ走行制御を開始する、第2ONプロセスが実行される。
【0044】
第4から第6までの操作指令が入力されると、記憶部64から変速値が読み出され、各操作指令に割り当てられている速度調整情報に基づいて調整された変速値(調整変速値)を算定され、この算定された調整変速値を新たな変速値として記憶部64に記憶し、この算定された調整変速値でのクルーズ走行制御を開始する、クルーズ走行での速度調整プロセスが実行される。第7操作指令が入力されると、現状の変速ペダル30の操作位置に基づく変速値を算定され、この算定された変速値でのクルーズ走行制御を開始する、OFFプロセスが実行される。
【0045】
なお、この変形例では、4つの操作位置と、ON時間評価によって8つのスイッチ状態を作り出し、それぞれに制御内容を割り当てたが、その割り当て方は一例であり、本発明においてその他の割り当て方を採用することができる。また、その他のスイッチ状態の作り出しも自由である。
【0046】
先の実施形態では、車両キースイッチがONされたとき、または車両キースイッチがOFFされたときには、記憶部64の内容がクリアされるとしたが、一度記憶された記憶部64の内容は上書きしない限り、原則としてクリアされないように構成してもよい。
【0047】
次に、図10、図11、図12、図13を用いて説明した変速制御システムから変速値記憶機能を省いた変速制御システムを説明する。この簡単化されたシステムにおける定速モード走行制御の流れを図14と図15の模式図を用いて以下に説明する。なお、先の変速制御システムと重複する機能の説明は省略する。このシステムにおける定速走行操作手段としてのシーソー型定速スイッチ90に対する運転者の操作を通じて、図14に示すように、UP側の長時間または短時間(つまりON時間に無関係)の深押しで第1a操作指令が作りだされる。第7操作指令、及び図11に示されている第3操作指令、第4操作指令、第5操作指令、第6操作指令も同様に作り出され、その操作指令に基づくプロセスも同様である。
【0048】
第1a操作指令はクルーズ制御を開始させる指令であり、第1a操作指令に割り当てられている制御内容は、現在操向している車速、つまり現状の変速値での定速度走行であるクルーズ制御に移行する(クルーズON)制御内容が割り当てられる。つまり、この変速制御システムでは、変速値を記憶する記憶部64が省かれているので、通常走行から定速度走行(クルーズ走行)への移行時は常にその時点での変速値が用いられる。従って、定速度走行に移行する前の走行速度が定速度走行で運転者の希望する定速度走行でない場合は、図11で示すような第3操作指令、第4操作指令、第5操作指令、第6操作指令を用いて、クルーズ走行での速度調整プロセスを実行する。
【0049】
上述した実施形態における定速制御(クルーズ制御)の説明では、説明の簡単化のために副変速装置24の存在を無視していたが、この副変速装置24の変速状態を考慮することも可能である。例えば、副変速装置24に、高速段、中速段、低速段の3つが用意されているとすれば、記憶部64を各副変速段別に変速値を記憶するように構成し、各副変速段別に定速制御(クルーズ制御)を実行することができる。
【0050】
〔その他の別実施形態〕
(1)上述した実施形態では定速走行操作手段として、シーソー形スイッチを採用していたが、スライドスイッチやロータリスイッチなど、本発明の機能を満足する限りにおいて、種々の形態のスイッチを採用することができる。
(2)前記変速ECU6における各機能部は、説明の都合に合わせて区分けされており、それらの機能部の統合や分割は自在である。例えば、変速制御部62と定速走行管理部63とを統合してもよい。
(3)上述した実施の形態では、無段変速装置として、HST及びHSTを内蔵したHMTが採用されていたが、これに代えてCVTなどが用いられても、本発明を同様に適用することができる。
(4)上述した実施の形態では、車両としてトラクタに変速制御システムを採用した例を示したが、田植機やコンバインや芝刈機やバックホウなどの他の作業車、乗用車、トラックなどにおいても、本発明を同様に適用することができる。
【産業上の利用可能性】
【0051】
本発明は、車両を一定速度で走行させる定速走行(クルーズ走行)を行う変速制御システムに利用することができる。
【符号の説明】
【0052】
1:エンジン
6:変速ECU
61:入力信号処理部
62:変速制御部
63:定速走行管理部
64:記憶部
65:エンジン負荷判定部
20:油圧式無段変速装置(無段変速装置)
21:HST
30:変速ペダル(変速操作具)
90:定速スイッチ(定速走行操作器、定速走行操作手段)
95:車両キースイッチ
【特許請求の範囲】
【請求項1】
車両を一定速度で走行させる定速モードを有する変速制御システムであって、
エンジンからの回転動力を無段変速して出力する無段変速装置と、
前記無段変速装置の変速値を設定する変速制御部と、
前記無段変速装置に対する変速指令を前記変速制御部に与える変速操作具と、
定速モードによる走行を前記変速制御部に実行させる定速走行管理部と、
前記定速モードに関する操作指令として、前記変速操作具に基づく現在変速値を前記定速モード変速値として用いて前記定速モードに移行させる第1操作指令と、前記定速モードからの離脱を指令する離脱指令を、前記変速制御部に与える定速走行操作手段と、
を備えた変速制御システム。
【請求項2】
前記定速走行操作手段は、前記定速モード変速値の微増速調整を実行する第3操作指令と、前記微増速調整より大きな増速をもたらす通常増速調整を実行する第4操作指令と、前記定速モード変速値の微減速調整を実行する第5操作指令と、前記微減速調整より大きな減速をもたらす通常減速調整を実行する第6操作指令とを前記変速制御部に与える請求項1に記載の変速制御システム。
【請求項3】
前記定速走行操作手段は、少なくとも6つの操作状態を評価させることができる単一の定速走行操作器で構成されている請求項2に記載の変速制御システム。
【請求項4】
前記定速走行操作器は4つの操作スイッチ位置を有し、前記各操作スイッチ位置において少なくとも2段階の操作時間が評価される請求項3に記載の変速制御システム。
【請求項5】
前記定速走行操作器は、付勢保持される中立位置を基点とした一方方向で2段階の操作位置及び他方方向で2段階の操作位置が作り出されるシーソー型スイッチである請求項3または4に記載の変速制御システム。
【請求項6】
車両を一定速度で走行させる定速モードを有する変速制御システムであって、
エンジンからの回転動力を無段変速して出力する無段変速装置と、
前記無段変速装置の変速値を設定する変速制御部と、
前記無段変速装置に対する変速指令を前記変速制御部に与える変速操作具と、
前記変速制御部に対して、定速モード時の変速値である定速モード変速値を変更する変更指令、前記定速モードへの移行を指令する移行指令、前記定速モードからの離脱を指令する離脱指令を与える定速走行操作手段と、
前記定速走行操作手段によって設定された定速モード変速値を記憶する記憶部と、
前記定速走行操作手段による前記移行指令に基づいて前記記憶部から読み込んだ定速モード変速値での定速モードを前記変速制御部に実行させる定速走行管理部と、
を備えた変速制御システム。
【請求項7】
前記定速走行操作手段が単一の定速走行操作器で構成され、前記定速走行操作器は、所定変速値単位の変更指令を与える変更操作位置と、前記変速制御部に前記定速モードへの移行を指令する移行操作位置と、前記定速モードからの離脱を指令する離脱操作位置とを有する請求項6に記載の変速制御システム。
【請求項8】
前記定速走行操作器は、付勢保持される中立位置を基点とした一方方向と他方方向の操作変位が可能であり、一方方向での終端操作変位位置が前記移行操作位置であり、他方方向での終端操作変位位置が前記離脱操作位置であり、一方方向及び他方方向での終端操作変位位置までの単位操作変位位置が前記変更操作位置である請求項7に記載の変速制御システム。
【請求項9】
車両キースイッチON時に前記記憶部がクリアされ、前記記憶部がクリア状態の場合、前記変速制御部は前記定速モード変速値として前記変速操作具による変速指令に基づく変速値を用いる請求項6から8のいずれか一項に記載の変速制御システム。
【請求項10】
前記記憶部が車両キースイッチOFF時にその内容がクリアされない不揮発性メモリから構成され、前記記憶部に記憶された定速モード変速値は書き換えられるまで維持される請求項6から8のいずれか一項に記載の変速制御システム。
【請求項11】
エンジン負荷に余裕がある低負荷を判定するエンジン負荷判定部が備えられ、前記定速モード時において前記低負荷が判定された場合、エンジン回転数を所定量だけ低減させるとともに、車両速度を維持するために当該回転数低下指令によるエンジン回転数の低下を補償するように前記変速値を変更する請求項6から10のいずれか一項に記載の変速制御システム。
【請求項12】
前記定速走行操作手段による移行指令には、前記変速操作具に基づく現在変速値を前記定速モード変速値として用いて前記定速モードに移行させる第1操作指令と、前記記憶部から読み込んだ定速モード変速値を用いて前記定速モードに移行させる第2操作指令とが含まれている請求項6に記載の変速制御システム。
【請求項13】
前記定速走行操作手段による変更指令には、前記定速モード変速値の微増速調整を実行する微増速調整指令と、前記微増速調整より大きな増速をもたらす通常増速調整を実行する通常増速調整指令と、前記定速モード変速値の微減速調整を実行する微減速調整指令と、前記微減速調整より大きな減速をもたらす通常減速調整を実行する通常減速調整指令とが含まれている請求項6または12に記載の変速制御システム。
【請求項14】
車両を一定速度で走行させる定速モードを有する変速制御システムであって、
エンジンからの回転動力を無段変速して出力する無段変速装置と、
前記無段変速装置の変速値を設定する変速制御部と、
前記無段変速装置に対する変速指令を前記変速制御部に与える変速操作具と、
定速モードによる走行を前記変速制御部に実行させる定速走行管理部と、
前記定速モード時の変速値である定速モード変速値を記憶する記憶部と、
前記定速モードに関する操作指令として、前記変速操作具に基づく現在変速値を前記定速モード変速値として用いて前記定速モードに移行させる第1操作指令と、前記記憶部から読み込んだ定速モード変速値を用いて前記定速モードに移行させる第2操作指令と、前記定速モードからの離脱を指令する離脱指令を、前記変速制御部に与える定速走行操作手段と、
を備えた変速制御システム。
【請求項15】
前記定速走行操作手段は、前記定速モード変速値の微増速調整を実行する第3操作指令と、前記微増速調整より大きな増速をもたらす通常増速調整を実行する第4操作指令と、前記定速モード変速値の微減速調整を実行する第5操作指令と、前記微減速調整より大きな減速をもたらす通常減速調整を実行する第6操作指令とを前記変速制御部に与える請求項14に記載の変速制御システム。
【請求項16】
前記定速走行操作手段は、少なくとも7つの操作状態を評価させることができる単一の定速走行操作器で構成されている請求項15に記載の変速制御システム。
【請求項17】
前記定速走行操作器は4つの操作スイッチ位置を有し、前記各操作スイッチ位置において少なくとも2段階の操作時間が評価される請求項16に記載の変速制御システム。
【請求項18】
前記定速走行操作器は、付勢保持される中立位置を基点とした一方方向で2段階の操作位置及び他方方向で2段階の操作位置が作り出されるシーソー型スイッチである請求項16または17に記載の変速制御システム。
【請求項19】
前記記憶部が車両キースイッチOFF時にその内容がクリアされない不揮発性メモリから構成され、前記記憶部に記憶された定速モード変速値は書き換えられるまで維持される請求項14から18のいずれか一項に記載の変速制御システム。
【請求項1】
車両を一定速度で走行させる定速モードを有する変速制御システムであって、
エンジンからの回転動力を無段変速して出力する無段変速装置と、
前記無段変速装置の変速値を設定する変速制御部と、
前記無段変速装置に対する変速指令を前記変速制御部に与える変速操作具と、
定速モードによる走行を前記変速制御部に実行させる定速走行管理部と、
前記定速モードに関する操作指令として、前記変速操作具に基づく現在変速値を前記定速モード変速値として用いて前記定速モードに移行させる第1操作指令と、前記定速モードからの離脱を指令する離脱指令を、前記変速制御部に与える定速走行操作手段と、
を備えた変速制御システム。
【請求項2】
前記定速走行操作手段は、前記定速モード変速値の微増速調整を実行する第3操作指令と、前記微増速調整より大きな増速をもたらす通常増速調整を実行する第4操作指令と、前記定速モード変速値の微減速調整を実行する第5操作指令と、前記微減速調整より大きな減速をもたらす通常減速調整を実行する第6操作指令とを前記変速制御部に与える請求項1に記載の変速制御システム。
【請求項3】
前記定速走行操作手段は、少なくとも6つの操作状態を評価させることができる単一の定速走行操作器で構成されている請求項2に記載の変速制御システム。
【請求項4】
前記定速走行操作器は4つの操作スイッチ位置を有し、前記各操作スイッチ位置において少なくとも2段階の操作時間が評価される請求項3に記載の変速制御システム。
【請求項5】
前記定速走行操作器は、付勢保持される中立位置を基点とした一方方向で2段階の操作位置及び他方方向で2段階の操作位置が作り出されるシーソー型スイッチである請求項3または4に記載の変速制御システム。
【請求項6】
車両を一定速度で走行させる定速モードを有する変速制御システムであって、
エンジンからの回転動力を無段変速して出力する無段変速装置と、
前記無段変速装置の変速値を設定する変速制御部と、
前記無段変速装置に対する変速指令を前記変速制御部に与える変速操作具と、
前記変速制御部に対して、定速モード時の変速値である定速モード変速値を変更する変更指令、前記定速モードへの移行を指令する移行指令、前記定速モードからの離脱を指令する離脱指令を与える定速走行操作手段と、
前記定速走行操作手段によって設定された定速モード変速値を記憶する記憶部と、
前記定速走行操作手段による前記移行指令に基づいて前記記憶部から読み込んだ定速モード変速値での定速モードを前記変速制御部に実行させる定速走行管理部と、
を備えた変速制御システム。
【請求項7】
前記定速走行操作手段が単一の定速走行操作器で構成され、前記定速走行操作器は、所定変速値単位の変更指令を与える変更操作位置と、前記変速制御部に前記定速モードへの移行を指令する移行操作位置と、前記定速モードからの離脱を指令する離脱操作位置とを有する請求項6に記載の変速制御システム。
【請求項8】
前記定速走行操作器は、付勢保持される中立位置を基点とした一方方向と他方方向の操作変位が可能であり、一方方向での終端操作変位位置が前記移行操作位置であり、他方方向での終端操作変位位置が前記離脱操作位置であり、一方方向及び他方方向での終端操作変位位置までの単位操作変位位置が前記変更操作位置である請求項7に記載の変速制御システム。
【請求項9】
車両キースイッチON時に前記記憶部がクリアされ、前記記憶部がクリア状態の場合、前記変速制御部は前記定速モード変速値として前記変速操作具による変速指令に基づく変速値を用いる請求項6から8のいずれか一項に記載の変速制御システム。
【請求項10】
前記記憶部が車両キースイッチOFF時にその内容がクリアされない不揮発性メモリから構成され、前記記憶部に記憶された定速モード変速値は書き換えられるまで維持される請求項6から8のいずれか一項に記載の変速制御システム。
【請求項11】
エンジン負荷に余裕がある低負荷を判定するエンジン負荷判定部が備えられ、前記定速モード時において前記低負荷が判定された場合、エンジン回転数を所定量だけ低減させるとともに、車両速度を維持するために当該回転数低下指令によるエンジン回転数の低下を補償するように前記変速値を変更する請求項6から10のいずれか一項に記載の変速制御システム。
【請求項12】
前記定速走行操作手段による移行指令には、前記変速操作具に基づく現在変速値を前記定速モード変速値として用いて前記定速モードに移行させる第1操作指令と、前記記憶部から読み込んだ定速モード変速値を用いて前記定速モードに移行させる第2操作指令とが含まれている請求項6に記載の変速制御システム。
【請求項13】
前記定速走行操作手段による変更指令には、前記定速モード変速値の微増速調整を実行する微増速調整指令と、前記微増速調整より大きな増速をもたらす通常増速調整を実行する通常増速調整指令と、前記定速モード変速値の微減速調整を実行する微減速調整指令と、前記微減速調整より大きな減速をもたらす通常減速調整を実行する通常減速調整指令とが含まれている請求項6または12に記載の変速制御システム。
【請求項14】
車両を一定速度で走行させる定速モードを有する変速制御システムであって、
エンジンからの回転動力を無段変速して出力する無段変速装置と、
前記無段変速装置の変速値を設定する変速制御部と、
前記無段変速装置に対する変速指令を前記変速制御部に与える変速操作具と、
定速モードによる走行を前記変速制御部に実行させる定速走行管理部と、
前記定速モード時の変速値である定速モード変速値を記憶する記憶部と、
前記定速モードに関する操作指令として、前記変速操作具に基づく現在変速値を前記定速モード変速値として用いて前記定速モードに移行させる第1操作指令と、前記記憶部から読み込んだ定速モード変速値を用いて前記定速モードに移行させる第2操作指令と、前記定速モードからの離脱を指令する離脱指令を、前記変速制御部に与える定速走行操作手段と、
を備えた変速制御システム。
【請求項15】
前記定速走行操作手段は、前記定速モード変速値の微増速調整を実行する第3操作指令と、前記微増速調整より大きな増速をもたらす通常増速調整を実行する第4操作指令と、前記定速モード変速値の微減速調整を実行する第5操作指令と、前記微減速調整より大きな減速をもたらす通常減速調整を実行する第6操作指令とを前記変速制御部に与える請求項14に記載の変速制御システム。
【請求項16】
前記定速走行操作手段は、少なくとも7つの操作状態を評価させることができる単一の定速走行操作器で構成されている請求項15に記載の変速制御システム。
【請求項17】
前記定速走行操作器は4つの操作スイッチ位置を有し、前記各操作スイッチ位置において少なくとも2段階の操作時間が評価される請求項16に記載の変速制御システム。
【請求項18】
前記定速走行操作器は、付勢保持される中立位置を基点とした一方方向で2段階の操作位置及び他方方向で2段階の操作位置が作り出されるシーソー型スイッチである請求項16または17に記載の変速制御システム。
【請求項19】
前記記憶部が車両キースイッチOFF時にその内容がクリアされない不揮発性メモリから構成され、前記記憶部に記憶された定速モード変速値は書き換えられるまで維持される請求項14から18のいずれか一項に記載の変速制御システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2013−50205(P2013−50205A)
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願番号】特願2012−48288(P2012−48288)
【出願日】平成24年3月5日(2012.3.5)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
【公開日】平成25年3月14日(2013.3.14)
【国際特許分類】
【出願日】平成24年3月5日(2012.3.5)
【出願人】(000001052)株式会社クボタ (4,415)
【Fターム(参考)】
[ Back to top ]