
車両用変速機における損傷の早期検出方法
本発明は,少なくとも1つの加速度センサを備える車両用変速機の損傷を早期に検出する方法に関する。この加速度センサにより,変速機内の機械的振動を検出して(S1)電気的信号(a(t))に変換する(S2)。その電気的信号(a(t))をディジタル化(S3)し,かつ閾値(aG)と比較する(S4)。本発明では,変速機内の機械的振動を特定の作動部位において検出し,ディジタル化した電気的信号(a(t))に基づき,経時的に変動する加速度変動を決定し,加速度変動がその閾値(aG)を超過する状態(Z(t))の発生回数を計数し,その発生回数に基づいて変速機の損傷確率(P(t))を決定する(S5)。更に本発明は,該方法により損傷を早期に検出可能とした変速機と,該方法の各ステップを実行するためのコンピュータプログラム製品にも関する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は,車両用変速機内の機械的振動を少なくとも1つの加速度センサにより検出して電気的信号に変換し,その電気的信号をディジタル化して閾値と比較することにより変速機における損傷を早期に検出する方法に関するものである。更に本発明は,該方法により損傷を検出可能とした変速機,並びに該方法の各ステップを実行するためのコンピュータプログラム製品に関するものでもある。
【背景技術】
【0002】
最近の車両用変速機における制御装置は多くの場合に診断手段を備え,損傷の発生時に診断手段により所要の対応措置(例えば,低速側変速段への強制切替え)を講じて他の部品の連鎖的な損傷を回避可能としている。システムによっては,変速機内の振動を検出し,重大な損傷が発生した場合に変速機部品の損傷を表示可能としたセンサが設けられている。すなわち,振動をモニタすることにより損傷を早期に検出し,かつ早期の時点で排除することができるので,致命的な損傷の発生を回避することが可能である。
【0003】
特許文献1(ドイツ特許出願公開第10144076号公報)は,車両用変速機における損傷を早期に検出する方法を開示しており,この場合には加速度センサにより変速機の機械的振動を検出し,かつ,電気的信号に変換している。その電気的信号を先ずディジタル化し,フーリエ変換により周波数領域に変換する。これにより取得されたデータは,単一衝撃パルスからの共鳴データが時間領域に取得されるように,スケプトラム解析によって時間領域に再び変換する。この共鳴データは,スケプトラムとも称され,比較スケプトラムとしての閾値と比較して超過した際に損傷と判定するものである。
【0004】
しかしながら,上記の方法は,フーリエ変換及びスケプトラム解析を行うために相当の演算時間を要するという顕著な欠点を有している。これに対応して,車両用変速機の領域内に大容量メモリを備え,かつ高い演算性能を有する制御ユニットを設置することが必要となり,その結果として製造コストが大幅に増加することとなる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】ドイツ特許出願公開第10144076号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は,車両用変速機の損傷を早期に検出するための方法を,比較的低い演算性能を有する変速機制御システムの領域内においても,より短い演算時間で実行可能とすることである。その際,損傷の検出について十分に高い信頼性を保障可能とすべきである。
【課題を解決するための手段】
【0007】
上記課題は,請求項1に記載した方法と,請求項8に記載した装置により解決されるものである。また,本発明を実施するためのコンピュータプログラムと,そのためのデータ担体は,請求項9,10に記載したとおりである。
【0008】
本発明は,車両用変速機の特定の動作点において機械的振動を検出し,その検出データに基づくディジタル化された電気的信号から,経時的に変動する加速度変動を決定するという技術的教示を包含する。さらに,加速度変動がその閾値を超過する状態の発生回数を計数し,その発生回数に基づいて変速機の損傷確率を決定するものである。
【0009】
本発明の方法によれば,車両用変速機の損傷をより短い演算時間で,したがって比較的小容量のメモリ及び比較的低い演算性能のシステムを使用して検出することが可能である。機械的振動の検出データから変換され,かつディジタル化された加速度信号は,フーリエ変換により周波数領域に変換し,かつ,スケプトラム解析によって時間領域に再び変換する必要がなく,直接的に閾値と比較することができるからである。そのような検出が,変速機において閾値との良好な比較が保証される特定の作動部位についてのみ行われるため,検出した加速度,すなわち変速機内における機械的振動と,それぞれの閾値との差を十分な精度で確定することが可能である。さらに,加速度変動が閾値を超過する状態の発生回数を計数し,その計数値に基づいて損傷確率を決定するため,変速機の損傷を高い信頼性をもって検出することが可能である。これは損傷確率が,連続的に発生する超過状態に対して直接相関するからである。総体的に,本発明方法は,より低い演算性能をもって,したがって迅速に実行可能であって変速機の損傷の確実な早期検出を可能とするものである。
【0010】
本発明の一実施形態においては,前記超過状態を,加速度変動とその閾値との比較に加えて,加速度変化率とその閾値との比較により,電気的信号における大きな加速度変動の引き続く検出に基づいて判断する。この場合,加速度変化率の閾値との比較に際して少なくとも1つの変化率リミッタを使用し,該リミッタにより物理的に不可能な変化率を除外するのが好適である。電気的信号における加速度変化率もモニタすることにより,損傷の検出精度を高めることが可能である。その際,少なくとも1つの変化率リミッタを使用することにより,変速機において物理的に生じ得ない変化率は無視されるものである。
【0011】
本発明の他の実施形態においては,超過状態が発生する度に算出損傷確率を増加させ,超過状態が発生しない間は算出損傷確率を減少させる。これにより,大きな加速度変動及び加速度変化率が連続的に生じている場合に算出損傷確率を定常的に増加させ,ピーク加速度が一度しか生じない場合には算出損傷確率を一時的に増加させ,これは更なる超過状態がなければ再び低下させ得るという利点がある。このような措置を講じたことにより,単発的な事象と多発状態とをより確実に区別することができ,その区別に基づいて変速機の損傷状態に関する推定を行うことが可能である。
【0012】
本発明の更なる実施形態においては,算出損傷確率をその閾値と比較し,該閾値を超過したときに変速機損傷と判断する。この場合,変速機損傷の判断は記録及び/又はディスプレー表示するのが好適である。これにより,閾値を超過した際にシステムにより損傷状態を推定し,これを確定することができる。この損傷検出を車両の運転者に対してディスプレー表示し,早期の点検整備を促すことが考えられる。更に,この損傷検出を車両の電子制御システムにおける故障メモリに記録し,次回の点検整備に際してカスタマーサービスに表示することも可能である。これにより特定の車両状態,例えば過積載又は不適切使用を,後発的に推論することが可能である。
【0013】
これに対応する本発明の有利な実施形態においては,変速機の機械的振動を検出すべき前記特定の作動部位を,機械的振動が通常は軽微な作動領域に配置する。このような配置により,ノイズ等の影響が十分に除外されるため,ディジタル化された電気的信号と閾値とを最適条件下で比較することが可能である。すなわち,この作動部位は,変速機の高度の静粛性が確保され,かつ,負荷変動の想定されない領域に配置するものである。
【0014】
本発明に係る解決手段は,車両用変速機の制御システムにおけるプロセッサにダウンロードしたときに,そのプロセッサに本発明方法の各ステップを実行させるためのコンピュータプログラムとしても具体化することが可能である。
【0015】
これとの関連において,本発明は,上述したコンピュータプログラムが呼出可能に記録された,コンピュータで読取可能な記録媒体も包含する。
【図面の簡単な説明】
【0016】
【図1】本発明方法を実施するためのアルゴリズムを示すフローチャートである。
【図2】加速度信号の時間的変化を示すグラフである。
【図3】閾値超過状態,変速機の損傷確率及び損傷の判断を経時的変化として示すグラフである。
【発明を実施するための形態】
【0017】
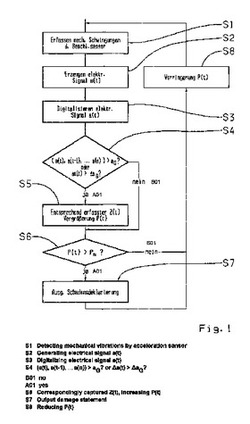
以下,本発明を図面に示す実施形態について更に詳述する。図1は,本発明方法を実施するためのアルゴリズムを示すフローチャートである。本発明方法によれば,先ずステップS1において,少なくとも1つの加速度センサにより車両用変速機内の機械的振動を検出する。この加速度センサは,作動状況をモニタすべき変速機部品の領域内に配置されている。検出した機械的振動は,ステップS2において少なくとも1つの加速度センサにより電気的信号a(t)に変換すると共に,ステップS3においてディジタル化する。信号a(t)から得られた加速度変動を,ステップS4において,その閾値aGと比較する。更に,信号a(t)から得られた加速度変化率Δa(t)をその閾値Δa(t)と比較する。この場合,ノイズを加速度変化率Δa(t)から除去して閾値との比較に際して考慮不要とすべく,少なくとも1つの変化率リミッタを使用し,該リミッタにより物理的に不可能な変化率を除外する。
【0018】
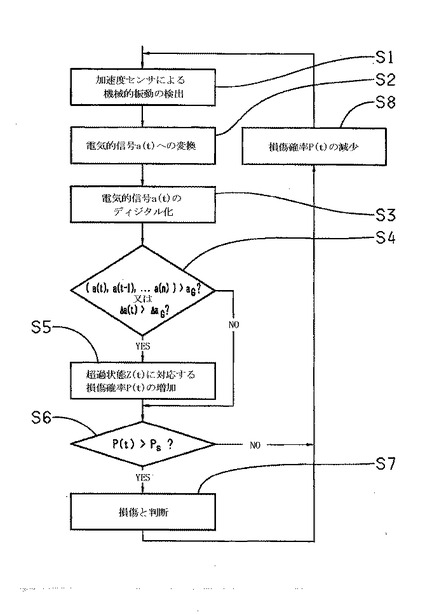
図2は,信号a(t)の時間的変化を例示するものである。同図から明らかなように,計測時間tMの間,閾値aGにより挟まれた変動領域では3つの時点において加速度変動が閾値を超えている。この超過状態をシステムで検出する。これに関連する加速度変化率Δa(t)は,例えば閾値aGに対する1回目の超過状態に関して示されている。
【0019】
連続的に発生する機械的振動は,変速機部品における切迫した故障を意味する。軸受,歯車及び同期装置の損傷は異音,したがって加速度センサにより検出可能な機械的振動を発生させる。加速度の検出や閾値aG及びΔaGとの比較は,変速機における,通常は静粛性が高く,かつ,負荷変動の想定されない作動部位において行う。その際,計測時間tMは,機械的振動について確実な判断を行うに適切な長さとする必要がある。
【0020】
ステップS4において加速度変動又はその変化率が閾値aG又はΔaGを超過していると判断すると,次のステップS5において超過状態Z(t)の発生回数を計数し,超過状態Z(t)の発生回数に応じて算出確率P(t)を増加させた後,ステップS6に移行させる。これに対して,ステップS4における比較結果が否(NO)であれば,直ちにステップS6に移行させる。ステップS6において,算出確率P(t)が閾値Psを超過しているか否かを判断する。算出確率が閾値を超過していれば,次のステップS7において車両用変速機の損傷と判断し,その旨を判示する。これは,車両の運転者に対して,変速機の損傷が検出されたことを表示し,又は点検期間を短縮すべきことを表示する態様で行うことができる。これと同時に,この損傷検出を車両の電子制御システムにおける故障メモリに記録し,次回の車両点検に際して留意させることも可能である。次に,ステップS7からステップS8に移行させて,算出確率P(t)を再び減少させる。算出確率が閾値を超過していない場合には,ステップS6からステップS8に直ちに移行させる。更に,ステップS8からステップS1に戻し,上述した一連のルーチンを反復する。
【0021】
ステップS8において算出確率P(t)を減少させる結果,閾値aG又はΔaGに対して連続的に発生する超過状態のみが算出確率P(t)を定常的に増加させることとなる。周辺からの影響等により発生する可能性のある単発的な,強度の機械的振動は,閾値aG又はΔaGに対する超過状態として検出され,これに伴って算出確率P(t)を増加させるものであるが,その事象が更なるルーチンの反復に際して重ねて検出されなければ算出確率P(t)を再び段階的に減少させるため,計測を続行する場合に更なる単発事象が発生しても損傷との判断は下されない。
【0022】
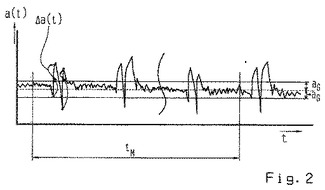
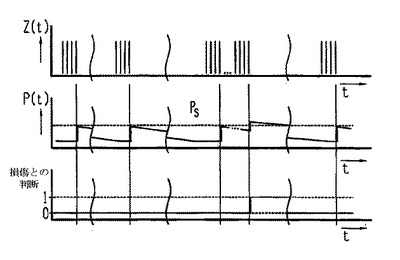
図3は,閾値の超過状態Z(t),変速機の算出損傷確率P(t)及び損傷の判断を経時的変化として例示するものである。最上段のグラフは,加速度信号a(t)が閾値aGを超過し,又は加速度信号a(t)の変化率が閾値ΔaGを超過している超過状態Z(t)を,垂直線により表わしている。その超過状態Z(t)を検出すると,中断のグラフに示すように,算出損傷確率P(t)が増加する。強度の振動を伴う最初の2回の超過状態Z(t)を検出した場合,破線で示す時間間隔が長いため,算出損傷確率P(t)は段階的に減少しており,閾値Psを超過することはない。この場合には,最下段のグラフに示す損傷の判断は0であり,これは車両用変速機の損傷の蓋然性が認められないことを意味する。3度目に発生した超過状態Z(t)の場合には時間間隔が短いので,算出損傷確率P(t)は閾値Psを超過する。その結果,最下段のグラフに示す信号は1に変更され,これは変速機の損傷の確率が高いことを意味するものである。したがって,変速機損傷の判断が下される。
【0023】
上述したとおり,本発明方法によれば,車両用変速機の損傷を早期に,より短い演算時間で検出することが可能である。その際,連続的に発生する事象のみに基づいて変速機損傷の確率P(t)を変化させ,また,変速機における特定の作動部位に対してのみ,加速度信号を閾値aG及びΔaGと比較するため,損傷の検出について十分に高い信頼性を保障することが可能である。
【符号の説明】
【0024】
a(t) 電気的信号
aG 閾値
Δa(t) 速度変化率
ΔaG 閾値
T 時間
tM 計測時間
Z(t) 超過状態
P(t) 算出確率
PS 閾値
【技術分野】
【0001】
本発明は,車両用変速機内の機械的振動を少なくとも1つの加速度センサにより検出して電気的信号に変換し,その電気的信号をディジタル化して閾値と比較することにより変速機における損傷を早期に検出する方法に関するものである。更に本発明は,該方法により損傷を検出可能とした変速機,並びに該方法の各ステップを実行するためのコンピュータプログラム製品に関するものでもある。
【背景技術】
【0002】
最近の車両用変速機における制御装置は多くの場合に診断手段を備え,損傷の発生時に診断手段により所要の対応措置(例えば,低速側変速段への強制切替え)を講じて他の部品の連鎖的な損傷を回避可能としている。システムによっては,変速機内の振動を検出し,重大な損傷が発生した場合に変速機部品の損傷を表示可能としたセンサが設けられている。すなわち,振動をモニタすることにより損傷を早期に検出し,かつ早期の時点で排除することができるので,致命的な損傷の発生を回避することが可能である。
【0003】
特許文献1(ドイツ特許出願公開第10144076号公報)は,車両用変速機における損傷を早期に検出する方法を開示しており,この場合には加速度センサにより変速機の機械的振動を検出し,かつ,電気的信号に変換している。その電気的信号を先ずディジタル化し,フーリエ変換により周波数領域に変換する。これにより取得されたデータは,単一衝撃パルスからの共鳴データが時間領域に取得されるように,スケプトラム解析によって時間領域に再び変換する。この共鳴データは,スケプトラムとも称され,比較スケプトラムとしての閾値と比較して超過した際に損傷と判定するものである。
【0004】
しかしながら,上記の方法は,フーリエ変換及びスケプトラム解析を行うために相当の演算時間を要するという顕著な欠点を有している。これに対応して,車両用変速機の領域内に大容量メモリを備え,かつ高い演算性能を有する制御ユニットを設置することが必要となり,その結果として製造コストが大幅に増加することとなる。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】ドイツ特許出願公開第10144076号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
本発明の課題は,車両用変速機の損傷を早期に検出するための方法を,比較的低い演算性能を有する変速機制御システムの領域内においても,より短い演算時間で実行可能とすることである。その際,損傷の検出について十分に高い信頼性を保障可能とすべきである。
【課題を解決するための手段】
【0007】
上記課題は,請求項1に記載した方法と,請求項8に記載した装置により解決されるものである。また,本発明を実施するためのコンピュータプログラムと,そのためのデータ担体は,請求項9,10に記載したとおりである。
【0008】
本発明は,車両用変速機の特定の動作点において機械的振動を検出し,その検出データに基づくディジタル化された電気的信号から,経時的に変動する加速度変動を決定するという技術的教示を包含する。さらに,加速度変動がその閾値を超過する状態の発生回数を計数し,その発生回数に基づいて変速機の損傷確率を決定するものである。
【0009】
本発明の方法によれば,車両用変速機の損傷をより短い演算時間で,したがって比較的小容量のメモリ及び比較的低い演算性能のシステムを使用して検出することが可能である。機械的振動の検出データから変換され,かつディジタル化された加速度信号は,フーリエ変換により周波数領域に変換し,かつ,スケプトラム解析によって時間領域に再び変換する必要がなく,直接的に閾値と比較することができるからである。そのような検出が,変速機において閾値との良好な比較が保証される特定の作動部位についてのみ行われるため,検出した加速度,すなわち変速機内における機械的振動と,それぞれの閾値との差を十分な精度で確定することが可能である。さらに,加速度変動が閾値を超過する状態の発生回数を計数し,その計数値に基づいて損傷確率を決定するため,変速機の損傷を高い信頼性をもって検出することが可能である。これは損傷確率が,連続的に発生する超過状態に対して直接相関するからである。総体的に,本発明方法は,より低い演算性能をもって,したがって迅速に実行可能であって変速機の損傷の確実な早期検出を可能とするものである。
【0010】
本発明の一実施形態においては,前記超過状態を,加速度変動とその閾値との比較に加えて,加速度変化率とその閾値との比較により,電気的信号における大きな加速度変動の引き続く検出に基づいて判断する。この場合,加速度変化率の閾値との比較に際して少なくとも1つの変化率リミッタを使用し,該リミッタにより物理的に不可能な変化率を除外するのが好適である。電気的信号における加速度変化率もモニタすることにより,損傷の検出精度を高めることが可能である。その際,少なくとも1つの変化率リミッタを使用することにより,変速機において物理的に生じ得ない変化率は無視されるものである。
【0011】
本発明の他の実施形態においては,超過状態が発生する度に算出損傷確率を増加させ,超過状態が発生しない間は算出損傷確率を減少させる。これにより,大きな加速度変動及び加速度変化率が連続的に生じている場合に算出損傷確率を定常的に増加させ,ピーク加速度が一度しか生じない場合には算出損傷確率を一時的に増加させ,これは更なる超過状態がなければ再び低下させ得るという利点がある。このような措置を講じたことにより,単発的な事象と多発状態とをより確実に区別することができ,その区別に基づいて変速機の損傷状態に関する推定を行うことが可能である。
【0012】
本発明の更なる実施形態においては,算出損傷確率をその閾値と比較し,該閾値を超過したときに変速機損傷と判断する。この場合,変速機損傷の判断は記録及び/又はディスプレー表示するのが好適である。これにより,閾値を超過した際にシステムにより損傷状態を推定し,これを確定することができる。この損傷検出を車両の運転者に対してディスプレー表示し,早期の点検整備を促すことが考えられる。更に,この損傷検出を車両の電子制御システムにおける故障メモリに記録し,次回の点検整備に際してカスタマーサービスに表示することも可能である。これにより特定の車両状態,例えば過積載又は不適切使用を,後発的に推論することが可能である。
【0013】
これに対応する本発明の有利な実施形態においては,変速機の機械的振動を検出すべき前記特定の作動部位を,機械的振動が通常は軽微な作動領域に配置する。このような配置により,ノイズ等の影響が十分に除外されるため,ディジタル化された電気的信号と閾値とを最適条件下で比較することが可能である。すなわち,この作動部位は,変速機の高度の静粛性が確保され,かつ,負荷変動の想定されない領域に配置するものである。
【0014】
本発明に係る解決手段は,車両用変速機の制御システムにおけるプロセッサにダウンロードしたときに,そのプロセッサに本発明方法の各ステップを実行させるためのコンピュータプログラムとしても具体化することが可能である。
【0015】
これとの関連において,本発明は,上述したコンピュータプログラムが呼出可能に記録された,コンピュータで読取可能な記録媒体も包含する。
【図面の簡単な説明】
【0016】
【図1】本発明方法を実施するためのアルゴリズムを示すフローチャートである。
【図2】加速度信号の時間的変化を示すグラフである。
【図3】閾値超過状態,変速機の損傷確率及び損傷の判断を経時的変化として示すグラフである。
【発明を実施するための形態】
【0017】
以下,本発明を図面に示す実施形態について更に詳述する。図1は,本発明方法を実施するためのアルゴリズムを示すフローチャートである。本発明方法によれば,先ずステップS1において,少なくとも1つの加速度センサにより車両用変速機内の機械的振動を検出する。この加速度センサは,作動状況をモニタすべき変速機部品の領域内に配置されている。検出した機械的振動は,ステップS2において少なくとも1つの加速度センサにより電気的信号a(t)に変換すると共に,ステップS3においてディジタル化する。信号a(t)から得られた加速度変動を,ステップS4において,その閾値aGと比較する。更に,信号a(t)から得られた加速度変化率Δa(t)をその閾値Δa(t)と比較する。この場合,ノイズを加速度変化率Δa(t)から除去して閾値との比較に際して考慮不要とすべく,少なくとも1つの変化率リミッタを使用し,該リミッタにより物理的に不可能な変化率を除外する。
【0018】
図2は,信号a(t)の時間的変化を例示するものである。同図から明らかなように,計測時間tMの間,閾値aGにより挟まれた変動領域では3つの時点において加速度変動が閾値を超えている。この超過状態をシステムで検出する。これに関連する加速度変化率Δa(t)は,例えば閾値aGに対する1回目の超過状態に関して示されている。
【0019】
連続的に発生する機械的振動は,変速機部品における切迫した故障を意味する。軸受,歯車及び同期装置の損傷は異音,したがって加速度センサにより検出可能な機械的振動を発生させる。加速度の検出や閾値aG及びΔaGとの比較は,変速機における,通常は静粛性が高く,かつ,負荷変動の想定されない作動部位において行う。その際,計測時間tMは,機械的振動について確実な判断を行うに適切な長さとする必要がある。
【0020】
ステップS4において加速度変動又はその変化率が閾値aG又はΔaGを超過していると判断すると,次のステップS5において超過状態Z(t)の発生回数を計数し,超過状態Z(t)の発生回数に応じて算出確率P(t)を増加させた後,ステップS6に移行させる。これに対して,ステップS4における比較結果が否(NO)であれば,直ちにステップS6に移行させる。ステップS6において,算出確率P(t)が閾値Psを超過しているか否かを判断する。算出確率が閾値を超過していれば,次のステップS7において車両用変速機の損傷と判断し,その旨を判示する。これは,車両の運転者に対して,変速機の損傷が検出されたことを表示し,又は点検期間を短縮すべきことを表示する態様で行うことができる。これと同時に,この損傷検出を車両の電子制御システムにおける故障メモリに記録し,次回の車両点検に際して留意させることも可能である。次に,ステップS7からステップS8に移行させて,算出確率P(t)を再び減少させる。算出確率が閾値を超過していない場合には,ステップS6からステップS8に直ちに移行させる。更に,ステップS8からステップS1に戻し,上述した一連のルーチンを反復する。
【0021】
ステップS8において算出確率P(t)を減少させる結果,閾値aG又はΔaGに対して連続的に発生する超過状態のみが算出確率P(t)を定常的に増加させることとなる。周辺からの影響等により発生する可能性のある単発的な,強度の機械的振動は,閾値aG又はΔaGに対する超過状態として検出され,これに伴って算出確率P(t)を増加させるものであるが,その事象が更なるルーチンの反復に際して重ねて検出されなければ算出確率P(t)を再び段階的に減少させるため,計測を続行する場合に更なる単発事象が発生しても損傷との判断は下されない。
【0022】
図3は,閾値の超過状態Z(t),変速機の算出損傷確率P(t)及び損傷の判断を経時的変化として例示するものである。最上段のグラフは,加速度信号a(t)が閾値aGを超過し,又は加速度信号a(t)の変化率が閾値ΔaGを超過している超過状態Z(t)を,垂直線により表わしている。その超過状態Z(t)を検出すると,中断のグラフに示すように,算出損傷確率P(t)が増加する。強度の振動を伴う最初の2回の超過状態Z(t)を検出した場合,破線で示す時間間隔が長いため,算出損傷確率P(t)は段階的に減少しており,閾値Psを超過することはない。この場合には,最下段のグラフに示す損傷の判断は0であり,これは車両用変速機の損傷の蓋然性が認められないことを意味する。3度目に発生した超過状態Z(t)の場合には時間間隔が短いので,算出損傷確率P(t)は閾値Psを超過する。その結果,最下段のグラフに示す信号は1に変更され,これは変速機の損傷の確率が高いことを意味するものである。したがって,変速機損傷の判断が下される。
【0023】
上述したとおり,本発明方法によれば,車両用変速機の損傷を早期に,より短い演算時間で検出することが可能である。その際,連続的に発生する事象のみに基づいて変速機損傷の確率P(t)を変化させ,また,変速機における特定の作動部位に対してのみ,加速度信号を閾値aG及びΔaGと比較するため,損傷の検出について十分に高い信頼性を保障することが可能である。
【符号の説明】
【0024】
a(t) 電気的信号
aG 閾値
Δa(t) 速度変化率
ΔaG 閾値
T 時間
tM 計測時間
Z(t) 超過状態
P(t) 算出確率
PS 閾値
【特許請求の範囲】
【請求項1】
車両用変速機内の機械的振動を少なくとも1つの加速度センサにより検出して(S1)電気的信号(a(t))に変換し(S2),該信号をディジタル化(S3)した後に閾値(aG)と比較する(S4)ことにより変速機における損傷を早期に検出する方法において,
前記機械的振動を特定の作動部位において検出し,ディジタル化した電気的信号(a(t))に基づき,経時的に変動する加速度変動を決定し,該加速度変動が前記閾値(aG)を超過する超過状態(Z(t))の発生回数を計数し,該超過状態(Z(t))の発生回数に基づいて変速機の算出損傷確率(P(t))を決定する(S5)ことを特徴とする方法。
【請求項2】
請求項1に記載の方法において,前記超過状態(Z(t))を,加速度変動とその閾値(aG)との比較に加えて,加速度変化率(Δa(t))とその閾値(ΔaG)との比較により,前記電気的信号(a(t))における大きな加速度変化率の検出に基づいて判断することを特徴とする方法。
【請求項3】
請求項2に記載の方法において,前記加速度変化率(Δa(t))とその閾値(ΔaG)との比較に際して少なくとも1つの変化率リミッタを使用し,該リミッタにより物理的に不可能な変化率を除外することを特徴とする方法。
【請求項4】
請求項1〜3の何れか一項に記載の方法において,前記超過状態(Z(t))が発生する度に前記算出損傷確率(P(t))を増加させ(S5),前記超過状態(Z(t))が発生しない間は前記算出損傷確率(P(t))を減少させる(S8)ことを特徴とする方法。
【請求項5】
請求項1〜4の何れか一項に記載の方法において,前記算出損傷確率(P(t))をその閾値(Ps)と比較し(S6),該閾値を超過したときに変速機損傷と判断することを特徴とする方法。
【請求項6】
請求項5に記載の方法において,変速機損傷の前記判断を記録及び/又はディスプレー表示する(S7)ことを特徴とする方法。
【請求項7】
請求項1〜6の何れか一項に記載の方法において,前記特定の作動部位を,変速機の機械的振動が通常は軽微である特定の作動領域により形成することを特徴とする方法。
【請求項8】
車両用変速機であって,変速機の部品領域内に配置された少なくとも1つの加速度センサを備え,該加速度センサにより機械的振動を検出して電気的信号(a(t))に変換するものにおいて,請求項1〜7の何れか一項に記載の方法により,前記電気的信号(a(t))に基づいて損傷を判定することを特徴とする変速機。
【請求項9】
請求項8に記載の車両用変速機のためのコンピュータプログラム製品であって,該変速機の損傷を請求項1〜7の何れか一項に記載の方法により判定するものにおいて,変速機の特定の作動部位における機械的振動を検出し(S1),経時的に変動する加速度変動を決定し,電気的信号(a(t))が閾値(aG)を超過する状態の発生回数を計数し(S5),かつ,変速機の算出損傷確率(P(t))を決定する(S5)ためのルーチンが制御コマンドを構成するコンピュータプログラム。
【請求項10】
請求項9に記載のコンピュータプログラムを含むデータ担体。
【請求項1】
車両用変速機内の機械的振動を少なくとも1つの加速度センサにより検出して(S1)電気的信号(a(t))に変換し(S2),該信号をディジタル化(S3)した後に閾値(aG)と比較する(S4)ことにより変速機における損傷を早期に検出する方法において,
前記機械的振動を特定の作動部位において検出し,ディジタル化した電気的信号(a(t))に基づき,経時的に変動する加速度変動を決定し,該加速度変動が前記閾値(aG)を超過する超過状態(Z(t))の発生回数を計数し,該超過状態(Z(t))の発生回数に基づいて変速機の算出損傷確率(P(t))を決定する(S5)ことを特徴とする方法。
【請求項2】
請求項1に記載の方法において,前記超過状態(Z(t))を,加速度変動とその閾値(aG)との比較に加えて,加速度変化率(Δa(t))とその閾値(ΔaG)との比較により,前記電気的信号(a(t))における大きな加速度変化率の検出に基づいて判断することを特徴とする方法。
【請求項3】
請求項2に記載の方法において,前記加速度変化率(Δa(t))とその閾値(ΔaG)との比較に際して少なくとも1つの変化率リミッタを使用し,該リミッタにより物理的に不可能な変化率を除外することを特徴とする方法。
【請求項4】
請求項1〜3の何れか一項に記載の方法において,前記超過状態(Z(t))が発生する度に前記算出損傷確率(P(t))を増加させ(S5),前記超過状態(Z(t))が発生しない間は前記算出損傷確率(P(t))を減少させる(S8)ことを特徴とする方法。
【請求項5】
請求項1〜4の何れか一項に記載の方法において,前記算出損傷確率(P(t))をその閾値(Ps)と比較し(S6),該閾値を超過したときに変速機損傷と判断することを特徴とする方法。
【請求項6】
請求項5に記載の方法において,変速機損傷の前記判断を記録及び/又はディスプレー表示する(S7)ことを特徴とする方法。
【請求項7】
請求項1〜6の何れか一項に記載の方法において,前記特定の作動部位を,変速機の機械的振動が通常は軽微である特定の作動領域により形成することを特徴とする方法。
【請求項8】
車両用変速機であって,変速機の部品領域内に配置された少なくとも1つの加速度センサを備え,該加速度センサにより機械的振動を検出して電気的信号(a(t))に変換するものにおいて,請求項1〜7の何れか一項に記載の方法により,前記電気的信号(a(t))に基づいて損傷を判定することを特徴とする変速機。
【請求項9】
請求項8に記載の車両用変速機のためのコンピュータプログラム製品であって,該変速機の損傷を請求項1〜7の何れか一項に記載の方法により判定するものにおいて,変速機の特定の作動部位における機械的振動を検出し(S1),経時的に変動する加速度変動を決定し,電気的信号(a(t))が閾値(aG)を超過する状態の発生回数を計数し(S5),かつ,変速機の算出損傷確率(P(t))を決定する(S5)ためのルーチンが制御コマンドを構成するコンピュータプログラム。
【請求項10】
請求項9に記載のコンピュータプログラムを含むデータ担体。
【図1】


【図2】
【図3】
【図2】
【図3】
【公表番号】特表2013−501927(P2013−501927A)
【公表日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願番号】特願2012−524172(P2012−524172)
【出願日】平成22年7月14日(2010.7.14)
【国際出願番号】PCT/EP2010/060100
【国際公開番号】WO2011/018289
【国際公開日】平成23年2月17日(2011.2.17)
【出願人】(500045121)ツェットエフ、フリードリッヒスハーフェン、アクチエンゲゼルシャフト (312)
【氏名又は名称原語表記】ZF FRIEDRICHSHAFEN AG
【Fターム(参考)】
【公表日】平成25年1月17日(2013.1.17)
【国際特許分類】
【出願日】平成22年7月14日(2010.7.14)
【国際出願番号】PCT/EP2010/060100
【国際公開番号】WO2011/018289
【国際公開日】平成23年2月17日(2011.2.17)
【出願人】(500045121)ツェットエフ、フリードリッヒスハーフェン、アクチエンゲゼルシャフト (312)
【氏名又は名称原語表記】ZF FRIEDRICHSHAFEN AG
【Fターム(参考)】
[ Back to top ]