
車両用左右駆動力調整装置の制御装置
【課題】二次電池の充電率にかかわらず、常に姿勢制御を行うと共に、減速による違和感のない姿勢制御を行う車両用左右駆動力調整装置の制御装置を提供する。
【解決手段】姿勢制御を行うためのトルク差を演算し(ステップS1、S2)、二次電池の充電率の増減に応じて、電動AYCモータとブレーキ装置へのトルク差の配分率を変動させて(ステップS3〜S6)、配分されたトルク差により電動AYCモータ及びブレーキ装置を各々制御して、姿勢制御を行う(ステップS6〜14)。
【解決手段】姿勢制御を行うためのトルク差を演算し(ステップS1、S2)、二次電池の充電率の増減に応じて、電動AYCモータとブレーキ装置へのトルク差の配分率を変動させて(ステップS3〜S6)、配分されたトルク差により電動AYCモータ及びブレーキ装置を各々制御して、姿勢制御を行う(ステップS6〜14)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用左右駆動力調整装置を制御する制御装置に関する。
【背景技術】
【0002】
従来から、車両の左右輪の駆動力を調整する車両用左右駆動力調整装置が知られている。車両用左右駆動力調整装置は、左右輪の間にデファレンシャル・ギアと駆動力調整機構を有しており、駆動力調整機構を制御することで、左右輪への駆動力の配分を調整するようにしている。駆動力調整機構としては、クラッチ機構やブレーキ装置や電動モータ等を用いるものが知られており、中でも、電動モータを用いるものは、電動アクティブ・ヨー・コントロール(以降、電動AYCと呼ぶ。)と呼ばれており、電動モータを制御することで、左右輪への駆動力の配分を調整している。
【0003】
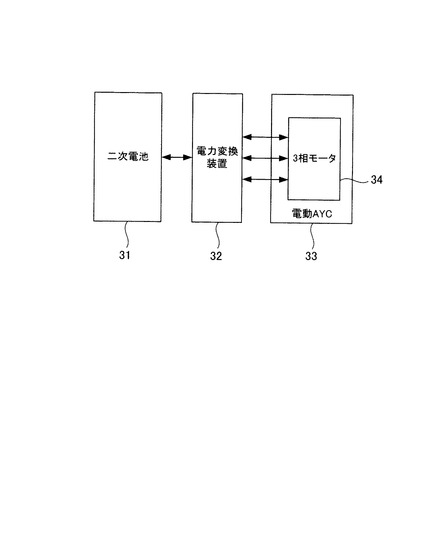
電動モータを用いた車両用左右駆動力調整装置においては、図5に示すように、リチウムイオン電池等の二次電池31からの電力を、例えば、電力変換装置32で3相交流へ変換し、変換した3相交流を電動AYC33の3相モータ34へ供給するようにしている。このとき、電動AYC33で消費される電力Pは以下の式で表すことができる。これは、後述する発電の場合も同様である。
【0004】
P=Tm・Nm=ΔT・ΔN/2
(Tm:モータトルク、Nm:モータ回転数、ΔT:トルク差、ΔN:左右輪回転数差)
【0005】
グリップ走行時に電動AYC33で車両の姿勢制御を行う場合、旋回促進制御のため、旋回を促進するモーメントを発生(回転数差を増大)する際には、3相モータ34を力行で制御するため、3相モータ34は電力Pを消費する。一方、旋回抑制制御のため、旋回を抑制するモーメントを発生(回転数差を減少)する際には、3相モータ34を回生で制御するため、3相モータ34は電力Pを発電する。従って、電動AYC33では、電力Pを消費する際には、二次電池31から電力を供給され、電力Pを発電する際には二次電池31へ充電することになる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3686626号公報
【特許文献2】特開2006−046495号公報
【特許文献3】特開2006−057745号公報
【特許文献4】特開2003−335143号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
図5に示すような電動AYC33を用いて、車両の姿勢制御を行う場合、二次電池31の充電率が100%時には、二次電池31へ充電ができないため、電動AYC33は旋回抑制制御ができなくなる。一方、二次電池31の充電率が0%時には、二次電池31から電力が取り出せないため、電動AYC33は旋回促進制御ができなくなる。
【0008】
なお、上述したように、駆動力調整機構として、ブレーキ装置を用いて、車両の姿勢制御を行う車両用左右駆動力調整装置もあるが、この場合、ブレーキの発熱によって、車両の持つ運動エネルギーを消費するため、燃費が低下すると共に、ブレーキの減速によって、ドライバーは違和感を覚えるという問題がある。
【0009】
本発明は上記課題に鑑みなされたもので、二次電池の充電率にかかわらず、常に姿勢制御を行うと共に、減速による違和感のない姿勢制御を行う車両用左右駆動力調整装置の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決する第1の発明に係る車両用左右駆動力調整装置の制御装置は、
車両の左右輪に各々制動力を付与するブレーキ装置と、前記左右輪にトルク差を発生させるモータと、前記モータに電力を供給すると共に、前記モータで発電された電力を充電する二次電池とを有し、前記ブレーキ装置、前記モータを用いて、車両の姿勢制御を行う車両用左右駆動力調整装置と、
前記モータ、前記ブレーキ装置及び前記二次電池を制御する制御装置とを備え、
前記制御装置は、
車両状態や操作状態に基づいて演算された目標車両姿勢に実車両姿勢を追従させる制御量を演算し、
前記二次電池の充電率の増減に応じて、前記モータと前記ブレーキ装置への前記制御量の配分率を変動させて、配分された制御量により前記モータ及び前記ブレーキ装置を各々制御して、車両の姿勢制御を行うことを特徴とする。
【0011】
上記課題を解決する第2の発明に係る車両用左右駆動力調整装置の制御装置は、
上記第1の発明に記載の車両用左右駆動力調整装置の制御装置において、
前記制御装置は、
演算された前記制御量による前記モータの動作が、前記モータによる回生であるか、又は、前記モータによる力行であるかを判定し、
回生である場合には、前記二次電池の充電率の増加に応じて、前記モータへの前記制御量の配分率を減少させると共に、前記ブレーキ装置への前記制御量の配分率を増加させて、配分された制御量により前記モータ及び前記ブレーキ装置を各々制御して、車両の姿勢制御を行い、
力行である場合には、前記二次電池の充電率の減少に応じて、前記モータへの前記制御量の配分率を減少させると共に、前記ブレーキ装置への前記制御量の配分率を増加させて、配分された制御量により前記モータ及び前記ブレーキ装置を各々制御して、車両の姿勢制御を行うことを特徴とする。
【0012】
上記課題を解決する第3の発明に係る車両用左右駆動力調整装置の制御装置は、
上記第2の発明に記載の車両用左右駆動力調整装置の制御装置において、
前記制御装置は、
回生である場合、前記充電率が充電率100%に近い領域においては、前記モータへの前記配分率を0%とすると共に、前記ブレーキ装置への前記配分率を100%として、前記ブレーキ装置のみを制御して、車両の姿勢制御を行い、
力行である場合、前記充電率が充電率0%に近い領域においては、前記モータへの前記配分率を0%とすると共に、前記ブレーキ装置への前記配分率を100%として、前記ブレーキ装置のみを制御して、車両の姿勢制御を行うことを特徴とする。
【発明の効果】
【0013】
本発明によれば、二次電池の充電率に応じて、車両の姿勢制御を行う制御量(トルク差)を電動AYC用モータとブレーキ装置に配分するので、二次電池の充電率にかかわらず、常に、車両の姿勢制御を行うことができる。
【0014】
又、本発明によれば、極力、電動AYC用モータを用いて、車両の姿勢制御を行うので、車両の持つ運動エネルギーを消費したり、燃費を低下させたりすることなく、効率を向上させることができ、減速による違和感のない制御を行うことができる。
【図面の簡単な説明】
【0015】
【図1】本発明に係る車両用左右駆動力調整装置の制御装置の実施形態の一例を説明する概略構成図である。
【図2】図1に示した車両用左右駆動力調整装置の制御装置を説明するブロック図である。
【図3】図1に示した車両用左右駆動力調整装置の制御装置におけるフローチャートである。
【図4】図1に示した車両用左右駆動力調整装置の制御装置で用いるマップであり、(a)は回生時、(b)は力行時のものである。
【図5】二次電池と電動AYC間の構成を説明するブロック図である。
【発明を実施するための形態】
【0016】
以下、図1〜図4を参照して、本発明に係る車両用左右駆動力調整装置の制御装置の実施形態の一例を説明する。
【0017】
(実施例1)
図1は、本実施例の車両用左右駆動力調整装置の制御装置を説明する概略構成図であり、図2は、図1に示した車両用左右駆動力調整装置の制御装置を説明するブロック図である。又、図3は、図1に示した車両用左右駆動力調整装の制御装置におけるフローチャートであり、図4(a)は、図1に示した車両用左右駆動力調整装の制御装置で用いる回生時のマップ、図4(b)は力行時のマップである。
【0018】
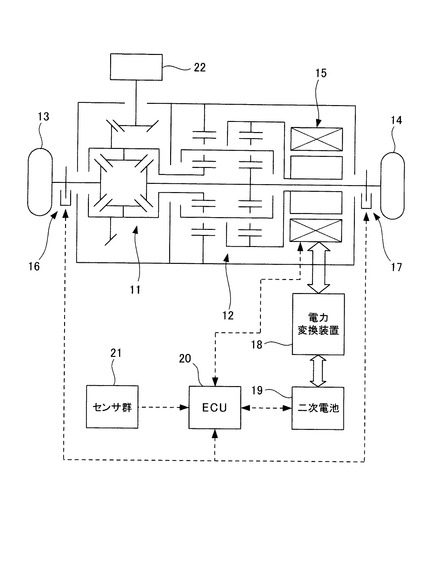
本実施例において、車両用左右駆動力調整装置は、デファレンシャル・ギア11と歯車機構12を介して連結されて、出力トルクにより左輪13と右輪14との間にトルク差を発生させる電動AYCモータ15と、左輪13及び右輪14に各々制動力を付与するブレーキ装置16、17と、電力変換装置18を介して、電動AYCモータ15に電力を供給すると共に、電動AYCモータ15で発電された電力を充電する二次電池19とを有している。そして、ECU(制御装置)20は、電動AYCモータ15、ブレーキ装置16、17及び二次電池19を制御するものである。詳細は後述するが、ECU20には、センサ群21からの種々のセンサ値が入力されて、その入力に応じた制御が行われることになる。
【0019】
このように、本実施例において、車両用左右駆動力調整装置は、車両の姿勢制御のために、ヨーモーメントを発生させるアクチュエータとなる電動AYC(歯車機構12、電動AYCモータ15)とブレーキ装置16、17とを有する構成である。
【0020】
なお、歯車機構12は、電動AYCモータ15と共に、左輪13と右輪14とに伝達される駆動力の配分量を調整するものであるが、歯車機構12の構成自体は、本発明と直接関係する部分ではないので、その詳細な説明は省略する。
【0021】
又、デファレンシャル・ギア11は、左輪13と右輪14との回転数差を調整するものであり、エンジンやモータ等の原動機22からの出力を、左輪13及び右輪14に駆動力として伝達するものである。デファレンシャル・ギア11としては、例えば、ベベルギア式のものを用いているが、デファレンシャル・ギア11の構成自体も、本発明と直接関係する部分ではないので、その詳細な説明は省略する。
【0022】
又、制御対象となる左輪13、右輪14は、本実施例では前輪とするが、後輪でも、四輪全部でも構わない。又、ブレーキ装置16、17は、左輪13、右輪14を各々制動できるものであれば、どのようなものを用いてもよいが、本実施例では、一例として、油圧式ブレーキ装置を用いて説明を行う。
【0023】
次に、図1と共に、図2、図4も参照して、ECU20の機能を説明する。
【0024】
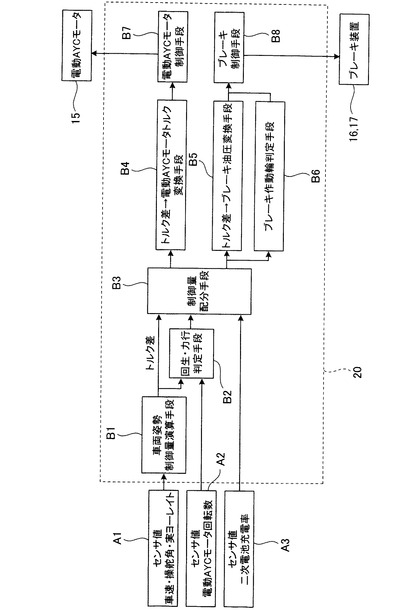
ECU20は、車両姿勢制御量演算手段B1と、回生・力行判定手段B2と、制御量配分手段B3と、トルク差→電動AYCモータトルク変換手段B4と、トルク差→ブレーキ油圧変換手段B5と、ブレーキ作動輪判定手段B6と、電動AYCモータ制御手段B7と、ブレーキ制御手段B8とを有する。
【0025】
車両姿勢制御量演算手段B1は、入力されたセンサ値A1に応じて、車両の姿勢制御を行うための制御量、つまり、トルク差を演算する。ここでは、実ヨーレートを目標ヨーレート追従させるためのヨーモーメントを発生させるトルク差を演算する。演算されたトルク差によって、旋回を抑制又は促進することになる。センサ値A1としては、センサ群23から、車速、操舵角、実ヨーレートが入力される。そして、目標ヨーレートは、入力された車速及び操舵角に基づき、その関数F1(車速・操舵角)から求めることができ、トルク差は、入力された実ヨーレートと求められた目標ヨーレートに基づき、PID制御により求めることができる。なお、トルク差は、PID制御に限らず、他の制御方法、例えば、H∞制御、ファジィ制御等により求めるようにしても良い。
【0026】
回生・力行判定手段B2は、トルク差によって発生させるヨーモーメントの方向と、入力されたセンサ値A2の電動AYCモータ回転数(回転方向の情報も含む)に応じて、電動AYCモータ15が回生となるか力行となるかを判定する。例えば、反時計回り方向のヨーレート、ヨーモーメント及びこのヨーモーメントを発生させるトルク差の符号を正とし、グリップ走行時に旋回した際の電動AYCモータ15の回転方向の符号を正とすると、[トルク差×電動AYCモータ回転数>=0]の場合を力行と判定し、それ以外の場合を回生と判定する。
【0027】
制御量配分手段B3は、力行・回生に応じて、配分率演算マップを選択し、入力されたセンサ値A3の二次電池充電率に応じて、電動AYCモータ15とブレーキ装置16、17に配分するトルク差の配分率を演算し、電動AYC配分量、ブレーキ装置配分量を求める。
【0028】
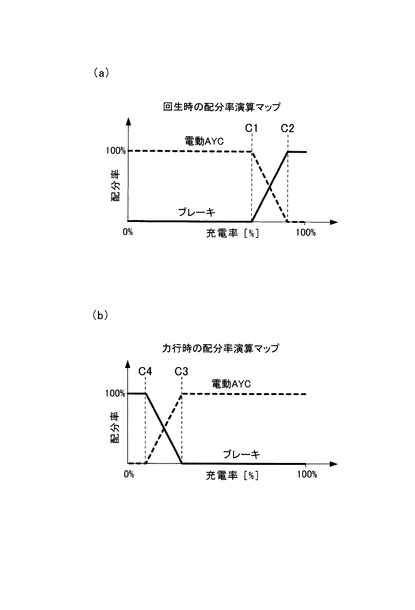
トルク差の配分率を演算するマップは、図4(a)、(b)に示すように、回生時と力行時で切り換えている。
【0029】
具体的には、回生時には、図4(a)に示すように、二次電池19において、充電率0%〜C1%の範囲では、電動AYC側への配分率を100%とし、ブレーキ側への配分率を0%としている。そして、充電率C1%以上となると、充電率C1%〜C2%(C1<C2)の範囲では、充電率の増加に比例して、電動AYC側への配分率を減少させ、ブレーキ側への配分率を増加させさせている。更に、充電率C2%以上となると、電動AYC側への配分率を0%とし、ブレーキ側への配分率を100%としている。
【0030】
このように、回生時には、二次電池19の充電率が高くない領域(充電率C1%以下)においては、電動AYC側のみにトルク差を配分して、電動AYCモータ15のみを使用するようにしている。そして、充電率が比較的高い領域(充電率C1%〜C2%)においては、充電率に応じて、電動AYC側及びブレーキ側へトルク差を配分して、電動AYCモータ15とブレーキ装置16、17を共用するようにしており、充電率が更に高い領域(充電率C2%以上)においては、ブレーキ側のみにトルク差を配分して、ブレーキ装置16、17のみを使用するようにしている。
【0031】
このようなマップを回生時に用いることにより、二次電池19の充電率が十分に高い領域(充電率C2%以上;C2%は電動AYCモータ15の発電により過充電となってしまう充電率)においては、ブレーキ装置16、17のみを使用することで、車両の姿勢制御を可能としている。又、充電率0%〜C2%の範囲では、電動AYCモータ15のみ、又は、電動AYCモータ15とブレーキ装置16、17を共に使用することにより、極力、電動AYCモータ15を用いて、車両の姿勢制御を行うので、車両の持つ運動エネルギーを消費したり、燃費を低下させたりすることなく、効率を向上させることができ、減速による違和感のない姿勢制御を行うことができる。
【0032】
一方、力行時には、図4(b)に示すように、二次電池19において、充電率100%〜C3%の範囲では、電動AYC側への配分率を100%とし、ブレーキ側への配分率を0%としている。そして、充電率C3%以下(C3<C1)となると、充電率C3%〜C4%(C4<C3)の範囲では、充電率の減少に比例して、電動AYC側への配分率を減少させ、ブレーキ側への配分率を増加させさせている。更に、充電率C4%以下となると、電動AYC側への配分率を0%とし、ブレーキ側への配分率を100%としている。
【0033】
このように、力行時には、二次電池19の充電率が低くない領域(充電率C3%以上)においては、電動AYC側のみにトルク差を配分して、電動AYCモータ15のみを使用するようにしている。そして、充電率が比較的低い領域(充電率C3%〜C4%)においては、充電率に応じて、電動AYC側及びブレーキ側へトルク差を配分して、電動AYCモータ15とブレーキ装置16、17を共用するようにしており、充電率が更に低い領域(充電率C4%以下)においては、ブレーキ側のみにトルク差を配分して、ブレーキ装置16、17のみを使用するようにしている。
【0034】
このようなマップを力行時に用いることにより、二次電池19の充電率が十分に低い領域(充電率C4%以下;C4%は、電動AYCモータ15の電力消費により充電率が0%となってしまう充電率)においては、ブレーキ装置16、17のみを使用することで、車両の姿勢制御を可能としている。又、充電率100%〜C4%の範囲では、電動AYCモータ15のみ、又は、電動AYCモータ15とブレーキ装置16、17を共に使用することにより、極力、電動AYCモータ15を用いて、車両の姿勢制御を行うので、車両の持つ運動エネルギーを消費したり、燃費を低下させたりすることなく、効率を向上させることができ、減速による違和感のない姿勢制御を行うことができる。
【0035】
そして、電動AYC配分量、ブレーキ装置配分量は以下の式から求める。
電動AYC配分量 =トルク差×電動AYCへの配分率
ブレーキ装置配分量=トルク差−電動AYC配分量
【0036】
トルク差→電動AYCモータトルク変換手段B4は、配分されたトルク差、即ち、求めた電動AYC配分量を、電動AYCモータトルクに変換する。電動AYCモータトルクは、以下の式を用いて変換する。
モータトルク=電動AYC配分量×変換係数(1/(2G))
ここで、Gは、モータ回転数Nm及び左右輪の回転数差ΔNを用いて、G=Nm/ΔNで表される。
【0037】
トルク差→ブレーキ油圧変換手段B5は、配分されたトルク差、即ち、求めたブレーキ装置配分量を、ブレーキ装置16、17を作動させるブレーキ油圧に変換する。ブレーキ油圧は、以下の式を用いて変換する。
ブレーキ油圧=ブレーキ装置配分量×変換係数
【0038】
ブレーキ作動輪判定手段B6は、配分されたトルク差、即ち、求めたブレーキ装置配分量から、どの車輪のブレーキ、即ち、ブレーキ装置16、17のいずれを作動させるかを判定する。
【0039】
電動AYCモータ制御手段B7は、入力されたモータトルク値を出力するように、電動AYCモータ15を制御する。
【0040】
ブレーキ制御手段B8は、制御を適用する車輪と入力されたブレーキ油圧に応じて、ブレーキ装置16、17を制御する。
【0041】
次に、図3のフローチャートに沿って、図1、図2及び図4も参照しながら、ECU20における制御手順を説明する。
【0042】
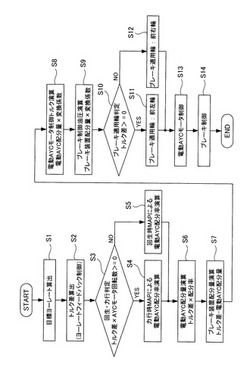
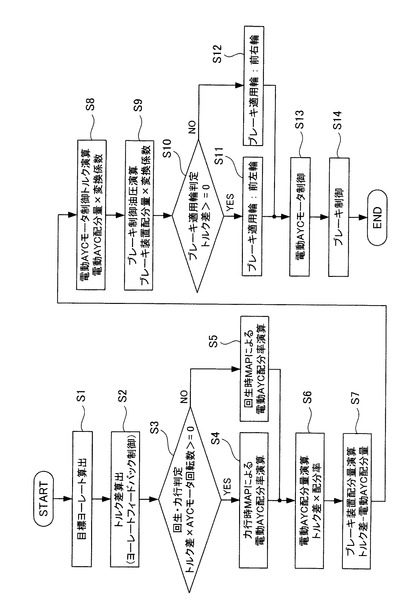
まず、検出した車速(車両状態)や操舵角(操作状態)に基づき、車速や操舵角に応じた目標ヨーレート(目標車両姿勢)を算出する(ステップS1;図3の車両姿勢制御量演算手段B1参照)。
【0043】
次に、検出した実ヨーレート(実車両姿勢)に基づき、目標ヨーレートを実ヨーレートに追従させるためのヨーモーメントを発生させるトルク差(制御量)を算出する(ステップS2;図3の車両姿勢制御量演算手段B1参照)。トルク差は、例えば、PID制御等を用いたヨーレートのフィードバック制御により求める。
【0044】
次に、算出したトルク差によって発生させるヨーモーメントの方向と、検出した電動AYCモータ回転数(回転方向の情報も含む)から、電動AYCモータ15の作動状態が回生となるか力行となるかを判定する(ステップS3;図3の回生・力行判定手段B2参照)。具体的には、前述したように、[トルク差×AYCモータ回転数>=0]が成り立つときは力行と判定し、ステップS4へ進み、それ以外は回生と判定し、ステップS5へ進む。
【0045】
力行と判定と判定された場合には、トルク差の配分率を演算するマップとして、力行時の配分率演算マップを選択し(図4(b)参照)、当該マップを用い、二次電池19の充電率に応じた、電動AYC側への配分率を演算する(ステップS4;図3の制御量配分手段B3参照)。
【0046】
一方、回生と判定と判定された場合には、トルク差の配分率を演算するマップとして、回生時の配分率演算マップを選択し(図4(a)参照)、当該マップを用い、二次電池19の充電率に応じた、電動AYC側への配分率を演算する(ステップS5;図3の制御量配分手段B3参照)。
【0047】
次に、電動AYC側への配分率に基づいて、電動AYC配分量を演算する(ステップS6;図3の制御量配分手段B3参照)。電動AYC配分量は、[トルク差×配分率]を演算することにより求める。
【0048】
次に、ブレーキ装置配分量を演算する(ステップS7;図3の制御量配分手段B3参照)。ブレーキ装置配分量は、[トルク差−電動AYC配分量]を演算することにより求める。
【0049】
つまり、ステップS3〜S7においては、回生であるか力行であるかの判定結果に応じて、トルク差の配分率を演算するマップを切り換え、切り換えたマップを用いて、二次電池の充電率に応じた配分率を演算し、演算した配分率を用いて、トルク差を電動AYC側とブレーキ側とに配分している。
【0050】
次に、配分されたトルク差、即ち、電動AYC配分量から、電動AYCモータ15で出力するモータトルクに変換する(ステップS8;図3のトルク差→電動AYCモータトルク変換手段B4参照)。電動AYCモータ51へのモータトルクは、[電動AYC配分量×変換係数]を演算することにより求める。
【0051】
同様に、配分されたトルク差、即ち、ブレーキ装置配分量から、ブレーキ装置16、17を作動させるブレーキ油圧に変換する(ステップS9;図3のトルク差→ブレーキ油圧変換手段B5参照)。ブレーキ油圧は、[ブレーキ装置配分量×変換係数]を演算することにより求める。
【0052】
このとき、ブレーキ装置配分量から、ブレーキを作動させる車輪を判定する。トルク差>=0である場合には、ブレーキ適用輪を前左輪と判定し、それ以外、つまり、トルク差<0である場合には、ブレーキ適用輪を前右輪と判定する(ステップS10〜S12;図3のブレーキ差動輪判定手段B6参照)。
【0053】
そして、上述したモータトルクを出力するように、電動AYCモータ15を制御する(ステップS13;図3の電動AYCモータ制御手段B7参照)。
【0054】
又、適用輪と判定された車輪に対して、上述したブレーキ油圧を制御するように、ブレーキ装置16、17を制御する(ステップS14;図3のブレーキ制御手段B8参照)。
【0055】
上述した制御手順により、車両の姿勢制御を行う際、二次電池19の充電率に応じて、トルク差を電動AYCモータ15とブレーキ装置16、17に配分している。これにより、二次電池19の充電率にかかわらず、常に、車両の姿勢制御を行うことを可能としている。又、極力、電動AYCモータ15を用いて、車両の姿勢制御を行うので、車両の持つ運動エネルギーを消費したり、燃費を低下させたりすることなく、効率を向上させることができ、減速による違和感のない制御を行うことが可能となる。
【産業上の利用可能性】
【0056】
本発明は、電動モータを用いて、車両の左右輪の駆動力を調整する車両用左右駆動力調整装置の制御装置に好適なものである。
【符号の説明】
【0057】
11 デファレンシャル・ギア
12 歯車機構
13 左輪
14 右輪
15 電動モータ
16、17 ブレーキ装置
19 二次電池
20 ECU
【技術分野】
【0001】
本発明は、車両用左右駆動力調整装置を制御する制御装置に関する。
【背景技術】
【0002】
従来から、車両の左右輪の駆動力を調整する車両用左右駆動力調整装置が知られている。車両用左右駆動力調整装置は、左右輪の間にデファレンシャル・ギアと駆動力調整機構を有しており、駆動力調整機構を制御することで、左右輪への駆動力の配分を調整するようにしている。駆動力調整機構としては、クラッチ機構やブレーキ装置や電動モータ等を用いるものが知られており、中でも、電動モータを用いるものは、電動アクティブ・ヨー・コントロール(以降、電動AYCと呼ぶ。)と呼ばれており、電動モータを制御することで、左右輪への駆動力の配分を調整している。
【0003】
電動モータを用いた車両用左右駆動力調整装置においては、図5に示すように、リチウムイオン電池等の二次電池31からの電力を、例えば、電力変換装置32で3相交流へ変換し、変換した3相交流を電動AYC33の3相モータ34へ供給するようにしている。このとき、電動AYC33で消費される電力Pは以下の式で表すことができる。これは、後述する発電の場合も同様である。
【0004】
P=Tm・Nm=ΔT・ΔN/2
(Tm:モータトルク、Nm:モータ回転数、ΔT:トルク差、ΔN:左右輪回転数差)
【0005】
グリップ走行時に電動AYC33で車両の姿勢制御を行う場合、旋回促進制御のため、旋回を促進するモーメントを発生(回転数差を増大)する際には、3相モータ34を力行で制御するため、3相モータ34は電力Pを消費する。一方、旋回抑制制御のため、旋回を抑制するモーメントを発生(回転数差を減少)する際には、3相モータ34を回生で制御するため、3相モータ34は電力Pを発電する。従って、電動AYC33では、電力Pを消費する際には、二次電池31から電力を供給され、電力Pを発電する際には二次電池31へ充電することになる。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特許第3686626号公報
【特許文献2】特開2006−046495号公報
【特許文献3】特開2006−057745号公報
【特許文献4】特開2003−335143号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
図5に示すような電動AYC33を用いて、車両の姿勢制御を行う場合、二次電池31の充電率が100%時には、二次電池31へ充電ができないため、電動AYC33は旋回抑制制御ができなくなる。一方、二次電池31の充電率が0%時には、二次電池31から電力が取り出せないため、電動AYC33は旋回促進制御ができなくなる。
【0008】
なお、上述したように、駆動力調整機構として、ブレーキ装置を用いて、車両の姿勢制御を行う車両用左右駆動力調整装置もあるが、この場合、ブレーキの発熱によって、車両の持つ運動エネルギーを消費するため、燃費が低下すると共に、ブレーキの減速によって、ドライバーは違和感を覚えるという問題がある。
【0009】
本発明は上記課題に鑑みなされたもので、二次電池の充電率にかかわらず、常に姿勢制御を行うと共に、減速による違和感のない姿勢制御を行う車両用左右駆動力調整装置の制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
上記課題を解決する第1の発明に係る車両用左右駆動力調整装置の制御装置は、
車両の左右輪に各々制動力を付与するブレーキ装置と、前記左右輪にトルク差を発生させるモータと、前記モータに電力を供給すると共に、前記モータで発電された電力を充電する二次電池とを有し、前記ブレーキ装置、前記モータを用いて、車両の姿勢制御を行う車両用左右駆動力調整装置と、
前記モータ、前記ブレーキ装置及び前記二次電池を制御する制御装置とを備え、
前記制御装置は、
車両状態や操作状態に基づいて演算された目標車両姿勢に実車両姿勢を追従させる制御量を演算し、
前記二次電池の充電率の増減に応じて、前記モータと前記ブレーキ装置への前記制御量の配分率を変動させて、配分された制御量により前記モータ及び前記ブレーキ装置を各々制御して、車両の姿勢制御を行うことを特徴とする。
【0011】
上記課題を解決する第2の発明に係る車両用左右駆動力調整装置の制御装置は、
上記第1の発明に記載の車両用左右駆動力調整装置の制御装置において、
前記制御装置は、
演算された前記制御量による前記モータの動作が、前記モータによる回生であるか、又は、前記モータによる力行であるかを判定し、
回生である場合には、前記二次電池の充電率の増加に応じて、前記モータへの前記制御量の配分率を減少させると共に、前記ブレーキ装置への前記制御量の配分率を増加させて、配分された制御量により前記モータ及び前記ブレーキ装置を各々制御して、車両の姿勢制御を行い、
力行である場合には、前記二次電池の充電率の減少に応じて、前記モータへの前記制御量の配分率を減少させると共に、前記ブレーキ装置への前記制御量の配分率を増加させて、配分された制御量により前記モータ及び前記ブレーキ装置を各々制御して、車両の姿勢制御を行うことを特徴とする。
【0012】
上記課題を解決する第3の発明に係る車両用左右駆動力調整装置の制御装置は、
上記第2の発明に記載の車両用左右駆動力調整装置の制御装置において、
前記制御装置は、
回生である場合、前記充電率が充電率100%に近い領域においては、前記モータへの前記配分率を0%とすると共に、前記ブレーキ装置への前記配分率を100%として、前記ブレーキ装置のみを制御して、車両の姿勢制御を行い、
力行である場合、前記充電率が充電率0%に近い領域においては、前記モータへの前記配分率を0%とすると共に、前記ブレーキ装置への前記配分率を100%として、前記ブレーキ装置のみを制御して、車両の姿勢制御を行うことを特徴とする。
【発明の効果】
【0013】
本発明によれば、二次電池の充電率に応じて、車両の姿勢制御を行う制御量(トルク差)を電動AYC用モータとブレーキ装置に配分するので、二次電池の充電率にかかわらず、常に、車両の姿勢制御を行うことができる。
【0014】
又、本発明によれば、極力、電動AYC用モータを用いて、車両の姿勢制御を行うので、車両の持つ運動エネルギーを消費したり、燃費を低下させたりすることなく、効率を向上させることができ、減速による違和感のない制御を行うことができる。
【図面の簡単な説明】
【0015】
【図1】本発明に係る車両用左右駆動力調整装置の制御装置の実施形態の一例を説明する概略構成図である。
【図2】図1に示した車両用左右駆動力調整装置の制御装置を説明するブロック図である。
【図3】図1に示した車両用左右駆動力調整装置の制御装置におけるフローチャートである。
【図4】図1に示した車両用左右駆動力調整装置の制御装置で用いるマップであり、(a)は回生時、(b)は力行時のものである。
【図5】二次電池と電動AYC間の構成を説明するブロック図である。
【発明を実施するための形態】
【0016】
以下、図1〜図4を参照して、本発明に係る車両用左右駆動力調整装置の制御装置の実施形態の一例を説明する。
【0017】
(実施例1)
図1は、本実施例の車両用左右駆動力調整装置の制御装置を説明する概略構成図であり、図2は、図1に示した車両用左右駆動力調整装置の制御装置を説明するブロック図である。又、図3は、図1に示した車両用左右駆動力調整装の制御装置におけるフローチャートであり、図4(a)は、図1に示した車両用左右駆動力調整装の制御装置で用いる回生時のマップ、図4(b)は力行時のマップである。
【0018】
本実施例において、車両用左右駆動力調整装置は、デファレンシャル・ギア11と歯車機構12を介して連結されて、出力トルクにより左輪13と右輪14との間にトルク差を発生させる電動AYCモータ15と、左輪13及び右輪14に各々制動力を付与するブレーキ装置16、17と、電力変換装置18を介して、電動AYCモータ15に電力を供給すると共に、電動AYCモータ15で発電された電力を充電する二次電池19とを有している。そして、ECU(制御装置)20は、電動AYCモータ15、ブレーキ装置16、17及び二次電池19を制御するものである。詳細は後述するが、ECU20には、センサ群21からの種々のセンサ値が入力されて、その入力に応じた制御が行われることになる。
【0019】
このように、本実施例において、車両用左右駆動力調整装置は、車両の姿勢制御のために、ヨーモーメントを発生させるアクチュエータとなる電動AYC(歯車機構12、電動AYCモータ15)とブレーキ装置16、17とを有する構成である。
【0020】
なお、歯車機構12は、電動AYCモータ15と共に、左輪13と右輪14とに伝達される駆動力の配分量を調整するものであるが、歯車機構12の構成自体は、本発明と直接関係する部分ではないので、その詳細な説明は省略する。
【0021】
又、デファレンシャル・ギア11は、左輪13と右輪14との回転数差を調整するものであり、エンジンやモータ等の原動機22からの出力を、左輪13及び右輪14に駆動力として伝達するものである。デファレンシャル・ギア11としては、例えば、ベベルギア式のものを用いているが、デファレンシャル・ギア11の構成自体も、本発明と直接関係する部分ではないので、その詳細な説明は省略する。
【0022】
又、制御対象となる左輪13、右輪14は、本実施例では前輪とするが、後輪でも、四輪全部でも構わない。又、ブレーキ装置16、17は、左輪13、右輪14を各々制動できるものであれば、どのようなものを用いてもよいが、本実施例では、一例として、油圧式ブレーキ装置を用いて説明を行う。
【0023】
次に、図1と共に、図2、図4も参照して、ECU20の機能を説明する。
【0024】
ECU20は、車両姿勢制御量演算手段B1と、回生・力行判定手段B2と、制御量配分手段B3と、トルク差→電動AYCモータトルク変換手段B4と、トルク差→ブレーキ油圧変換手段B5と、ブレーキ作動輪判定手段B6と、電動AYCモータ制御手段B7と、ブレーキ制御手段B8とを有する。
【0025】
車両姿勢制御量演算手段B1は、入力されたセンサ値A1に応じて、車両の姿勢制御を行うための制御量、つまり、トルク差を演算する。ここでは、実ヨーレートを目標ヨーレート追従させるためのヨーモーメントを発生させるトルク差を演算する。演算されたトルク差によって、旋回を抑制又は促進することになる。センサ値A1としては、センサ群23から、車速、操舵角、実ヨーレートが入力される。そして、目標ヨーレートは、入力された車速及び操舵角に基づき、その関数F1(車速・操舵角)から求めることができ、トルク差は、入力された実ヨーレートと求められた目標ヨーレートに基づき、PID制御により求めることができる。なお、トルク差は、PID制御に限らず、他の制御方法、例えば、H∞制御、ファジィ制御等により求めるようにしても良い。
【0026】
回生・力行判定手段B2は、トルク差によって発生させるヨーモーメントの方向と、入力されたセンサ値A2の電動AYCモータ回転数(回転方向の情報も含む)に応じて、電動AYCモータ15が回生となるか力行となるかを判定する。例えば、反時計回り方向のヨーレート、ヨーモーメント及びこのヨーモーメントを発生させるトルク差の符号を正とし、グリップ走行時に旋回した際の電動AYCモータ15の回転方向の符号を正とすると、[トルク差×電動AYCモータ回転数>=0]の場合を力行と判定し、それ以外の場合を回生と判定する。
【0027】
制御量配分手段B3は、力行・回生に応じて、配分率演算マップを選択し、入力されたセンサ値A3の二次電池充電率に応じて、電動AYCモータ15とブレーキ装置16、17に配分するトルク差の配分率を演算し、電動AYC配分量、ブレーキ装置配分量を求める。
【0028】
トルク差の配分率を演算するマップは、図4(a)、(b)に示すように、回生時と力行時で切り換えている。
【0029】
具体的には、回生時には、図4(a)に示すように、二次電池19において、充電率0%〜C1%の範囲では、電動AYC側への配分率を100%とし、ブレーキ側への配分率を0%としている。そして、充電率C1%以上となると、充電率C1%〜C2%(C1<C2)の範囲では、充電率の増加に比例して、電動AYC側への配分率を減少させ、ブレーキ側への配分率を増加させさせている。更に、充電率C2%以上となると、電動AYC側への配分率を0%とし、ブレーキ側への配分率を100%としている。
【0030】
このように、回生時には、二次電池19の充電率が高くない領域(充電率C1%以下)においては、電動AYC側のみにトルク差を配分して、電動AYCモータ15のみを使用するようにしている。そして、充電率が比較的高い領域(充電率C1%〜C2%)においては、充電率に応じて、電動AYC側及びブレーキ側へトルク差を配分して、電動AYCモータ15とブレーキ装置16、17を共用するようにしており、充電率が更に高い領域(充電率C2%以上)においては、ブレーキ側のみにトルク差を配分して、ブレーキ装置16、17のみを使用するようにしている。
【0031】
このようなマップを回生時に用いることにより、二次電池19の充電率が十分に高い領域(充電率C2%以上;C2%は電動AYCモータ15の発電により過充電となってしまう充電率)においては、ブレーキ装置16、17のみを使用することで、車両の姿勢制御を可能としている。又、充電率0%〜C2%の範囲では、電動AYCモータ15のみ、又は、電動AYCモータ15とブレーキ装置16、17を共に使用することにより、極力、電動AYCモータ15を用いて、車両の姿勢制御を行うので、車両の持つ運動エネルギーを消費したり、燃費を低下させたりすることなく、効率を向上させることができ、減速による違和感のない姿勢制御を行うことができる。
【0032】
一方、力行時には、図4(b)に示すように、二次電池19において、充電率100%〜C3%の範囲では、電動AYC側への配分率を100%とし、ブレーキ側への配分率を0%としている。そして、充電率C3%以下(C3<C1)となると、充電率C3%〜C4%(C4<C3)の範囲では、充電率の減少に比例して、電動AYC側への配分率を減少させ、ブレーキ側への配分率を増加させさせている。更に、充電率C4%以下となると、電動AYC側への配分率を0%とし、ブレーキ側への配分率を100%としている。
【0033】
このように、力行時には、二次電池19の充電率が低くない領域(充電率C3%以上)においては、電動AYC側のみにトルク差を配分して、電動AYCモータ15のみを使用するようにしている。そして、充電率が比較的低い領域(充電率C3%〜C4%)においては、充電率に応じて、電動AYC側及びブレーキ側へトルク差を配分して、電動AYCモータ15とブレーキ装置16、17を共用するようにしており、充電率が更に低い領域(充電率C4%以下)においては、ブレーキ側のみにトルク差を配分して、ブレーキ装置16、17のみを使用するようにしている。
【0034】
このようなマップを力行時に用いることにより、二次電池19の充電率が十分に低い領域(充電率C4%以下;C4%は、電動AYCモータ15の電力消費により充電率が0%となってしまう充電率)においては、ブレーキ装置16、17のみを使用することで、車両の姿勢制御を可能としている。又、充電率100%〜C4%の範囲では、電動AYCモータ15のみ、又は、電動AYCモータ15とブレーキ装置16、17を共に使用することにより、極力、電動AYCモータ15を用いて、車両の姿勢制御を行うので、車両の持つ運動エネルギーを消費したり、燃費を低下させたりすることなく、効率を向上させることができ、減速による違和感のない姿勢制御を行うことができる。
【0035】
そして、電動AYC配分量、ブレーキ装置配分量は以下の式から求める。
電動AYC配分量 =トルク差×電動AYCへの配分率
ブレーキ装置配分量=トルク差−電動AYC配分量
【0036】
トルク差→電動AYCモータトルク変換手段B4は、配分されたトルク差、即ち、求めた電動AYC配分量を、電動AYCモータトルクに変換する。電動AYCモータトルクは、以下の式を用いて変換する。
モータトルク=電動AYC配分量×変換係数(1/(2G))
ここで、Gは、モータ回転数Nm及び左右輪の回転数差ΔNを用いて、G=Nm/ΔNで表される。
【0037】
トルク差→ブレーキ油圧変換手段B5は、配分されたトルク差、即ち、求めたブレーキ装置配分量を、ブレーキ装置16、17を作動させるブレーキ油圧に変換する。ブレーキ油圧は、以下の式を用いて変換する。
ブレーキ油圧=ブレーキ装置配分量×変換係数
【0038】
ブレーキ作動輪判定手段B6は、配分されたトルク差、即ち、求めたブレーキ装置配分量から、どの車輪のブレーキ、即ち、ブレーキ装置16、17のいずれを作動させるかを判定する。
【0039】
電動AYCモータ制御手段B7は、入力されたモータトルク値を出力するように、電動AYCモータ15を制御する。
【0040】
ブレーキ制御手段B8は、制御を適用する車輪と入力されたブレーキ油圧に応じて、ブレーキ装置16、17を制御する。
【0041】
次に、図3のフローチャートに沿って、図1、図2及び図4も参照しながら、ECU20における制御手順を説明する。
【0042】
まず、検出した車速(車両状態)や操舵角(操作状態)に基づき、車速や操舵角に応じた目標ヨーレート(目標車両姿勢)を算出する(ステップS1;図3の車両姿勢制御量演算手段B1参照)。
【0043】
次に、検出した実ヨーレート(実車両姿勢)に基づき、目標ヨーレートを実ヨーレートに追従させるためのヨーモーメントを発生させるトルク差(制御量)を算出する(ステップS2;図3の車両姿勢制御量演算手段B1参照)。トルク差は、例えば、PID制御等を用いたヨーレートのフィードバック制御により求める。
【0044】
次に、算出したトルク差によって発生させるヨーモーメントの方向と、検出した電動AYCモータ回転数(回転方向の情報も含む)から、電動AYCモータ15の作動状態が回生となるか力行となるかを判定する(ステップS3;図3の回生・力行判定手段B2参照)。具体的には、前述したように、[トルク差×AYCモータ回転数>=0]が成り立つときは力行と判定し、ステップS4へ進み、それ以外は回生と判定し、ステップS5へ進む。
【0045】
力行と判定と判定された場合には、トルク差の配分率を演算するマップとして、力行時の配分率演算マップを選択し(図4(b)参照)、当該マップを用い、二次電池19の充電率に応じた、電動AYC側への配分率を演算する(ステップS4;図3の制御量配分手段B3参照)。
【0046】
一方、回生と判定と判定された場合には、トルク差の配分率を演算するマップとして、回生時の配分率演算マップを選択し(図4(a)参照)、当該マップを用い、二次電池19の充電率に応じた、電動AYC側への配分率を演算する(ステップS5;図3の制御量配分手段B3参照)。
【0047】
次に、電動AYC側への配分率に基づいて、電動AYC配分量を演算する(ステップS6;図3の制御量配分手段B3参照)。電動AYC配分量は、[トルク差×配分率]を演算することにより求める。
【0048】
次に、ブレーキ装置配分量を演算する(ステップS7;図3の制御量配分手段B3参照)。ブレーキ装置配分量は、[トルク差−電動AYC配分量]を演算することにより求める。
【0049】
つまり、ステップS3〜S7においては、回生であるか力行であるかの判定結果に応じて、トルク差の配分率を演算するマップを切り換え、切り換えたマップを用いて、二次電池の充電率に応じた配分率を演算し、演算した配分率を用いて、トルク差を電動AYC側とブレーキ側とに配分している。
【0050】
次に、配分されたトルク差、即ち、電動AYC配分量から、電動AYCモータ15で出力するモータトルクに変換する(ステップS8;図3のトルク差→電動AYCモータトルク変換手段B4参照)。電動AYCモータ51へのモータトルクは、[電動AYC配分量×変換係数]を演算することにより求める。
【0051】
同様に、配分されたトルク差、即ち、ブレーキ装置配分量から、ブレーキ装置16、17を作動させるブレーキ油圧に変換する(ステップS9;図3のトルク差→ブレーキ油圧変換手段B5参照)。ブレーキ油圧は、[ブレーキ装置配分量×変換係数]を演算することにより求める。
【0052】
このとき、ブレーキ装置配分量から、ブレーキを作動させる車輪を判定する。トルク差>=0である場合には、ブレーキ適用輪を前左輪と判定し、それ以外、つまり、トルク差<0である場合には、ブレーキ適用輪を前右輪と判定する(ステップS10〜S12;図3のブレーキ差動輪判定手段B6参照)。
【0053】
そして、上述したモータトルクを出力するように、電動AYCモータ15を制御する(ステップS13;図3の電動AYCモータ制御手段B7参照)。
【0054】
又、適用輪と判定された車輪に対して、上述したブレーキ油圧を制御するように、ブレーキ装置16、17を制御する(ステップS14;図3のブレーキ制御手段B8参照)。
【0055】
上述した制御手順により、車両の姿勢制御を行う際、二次電池19の充電率に応じて、トルク差を電動AYCモータ15とブレーキ装置16、17に配分している。これにより、二次電池19の充電率にかかわらず、常に、車両の姿勢制御を行うことを可能としている。又、極力、電動AYCモータ15を用いて、車両の姿勢制御を行うので、車両の持つ運動エネルギーを消費したり、燃費を低下させたりすることなく、効率を向上させることができ、減速による違和感のない制御を行うことが可能となる。
【産業上の利用可能性】
【0056】
本発明は、電動モータを用いて、車両の左右輪の駆動力を調整する車両用左右駆動力調整装置の制御装置に好適なものである。
【符号の説明】
【0057】
11 デファレンシャル・ギア
12 歯車機構
13 左輪
14 右輪
15 電動モータ
16、17 ブレーキ装置
19 二次電池
20 ECU
【特許請求の範囲】
【請求項1】
車両の左右輪に各々制動力を付与するブレーキ装置と、前記左右輪にトルク差を発生させるモータと、前記モータに電力を供給すると共に、前記モータで発電された電力を充電する二次電池とを有し、前記ブレーキ装置、前記モータを用いて、車両の姿勢制御を行う車両用左右駆動力調整装置と、
前記モータ、前記ブレーキ装置及び前記二次電池を制御する制御装置とを備え、
前記制御装置は、
車両状態や操作状態に基づいて演算された目標車両姿勢に実車両姿勢を追従させる制御量を演算し、
前記二次電池の充電率の増減に応じて、前記モータと前記ブレーキ装置への前記制御量の配分率を変動させて、配分された制御量により前記モータ及び前記ブレーキ装置を各々制御して、車両の姿勢制御を行うことを特徴とする車両用左右駆動力調整装置の制御装置。
【請求項2】
請求項1に記載の車両用左右駆動力調整装置の制御装置において、
前記制御装置は、
演算された前記制御量による前記モータの動作が、前記モータによる回生であるか、又は、前記モータによる力行であるかを判定し、
回生である場合には、前記二次電池の充電率の増加に応じて、前記モータへの前記制御量の配分率を減少させると共に、前記ブレーキ装置への前記制御量の配分率を増加させて、配分された制御量により前記モータ及び前記ブレーキ装置を各々制御して、車両の姿勢制御を行い、
力行である場合には、前記二次電池の充電率の減少に応じて、前記モータへの前記制御量の配分率を減少させると共に、前記ブレーキ装置への前記制御量の配分率を増加させて、配分された制御量により前記モータ及び前記ブレーキ装置を各々制御して、車両の姿勢制御を行うことを特徴とする車両用左右駆動力調整装置の制御装置。
【請求項3】
請求項2に記載の車両用左右駆動力調整装置の制御装置において、
前記制御装置は、
回生である場合、前記充電率が充電率100%に近い領域においては、前記モータへの前記配分率を0%とすると共に、前記ブレーキ装置への前記配分率を100%として、前記ブレーキ装置のみを制御して、車両の姿勢制御を行い、
力行である場合、前記充電率が充電率0%に近い領域においては、前記モータへの前記配分率を0%とすると共に、前記ブレーキ装置への前記配分率を100%として、前記ブレーキ装置のみを制御して、車両の姿勢制御を行うことを特徴とする車両用左右駆動力調整装置の制御装置。
【請求項1】
車両の左右輪に各々制動力を付与するブレーキ装置と、前記左右輪にトルク差を発生させるモータと、前記モータに電力を供給すると共に、前記モータで発電された電力を充電する二次電池とを有し、前記ブレーキ装置、前記モータを用いて、車両の姿勢制御を行う車両用左右駆動力調整装置と、
前記モータ、前記ブレーキ装置及び前記二次電池を制御する制御装置とを備え、
前記制御装置は、
車両状態や操作状態に基づいて演算された目標車両姿勢に実車両姿勢を追従させる制御量を演算し、
前記二次電池の充電率の増減に応じて、前記モータと前記ブレーキ装置への前記制御量の配分率を変動させて、配分された制御量により前記モータ及び前記ブレーキ装置を各々制御して、車両の姿勢制御を行うことを特徴とする車両用左右駆動力調整装置の制御装置。
【請求項2】
請求項1に記載の車両用左右駆動力調整装置の制御装置において、
前記制御装置は、
演算された前記制御量による前記モータの動作が、前記モータによる回生であるか、又は、前記モータによる力行であるかを判定し、
回生である場合には、前記二次電池の充電率の増加に応じて、前記モータへの前記制御量の配分率を減少させると共に、前記ブレーキ装置への前記制御量の配分率を増加させて、配分された制御量により前記モータ及び前記ブレーキ装置を各々制御して、車両の姿勢制御を行い、
力行である場合には、前記二次電池の充電率の減少に応じて、前記モータへの前記制御量の配分率を減少させると共に、前記ブレーキ装置への前記制御量の配分率を増加させて、配分された制御量により前記モータ及び前記ブレーキ装置を各々制御して、車両の姿勢制御を行うことを特徴とする車両用左右駆動力調整装置の制御装置。
【請求項3】
請求項2に記載の車両用左右駆動力調整装置の制御装置において、
前記制御装置は、
回生である場合、前記充電率が充電率100%に近い領域においては、前記モータへの前記配分率を0%とすると共に、前記ブレーキ装置への前記配分率を100%として、前記ブレーキ装置のみを制御して、車両の姿勢制御を行い、
力行である場合、前記充電率が充電率0%に近い領域においては、前記モータへの前記配分率を0%とすると共に、前記ブレーキ装置への前記配分率を100%として、前記ブレーキ装置のみを制御して、車両の姿勢制御を行うことを特徴とする車両用左右駆動力調整装置の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−126480(P2011−126480A)
【公開日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願番号】特願2009−288989(P2009−288989)
【出願日】平成21年12月21日(2009.12.21)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
【公開日】平成23年6月30日(2011.6.30)
【国際特許分類】
【出願日】平成21年12月21日(2009.12.21)
【出願人】(000006286)三菱自動車工業株式会社 (2,892)
【Fターム(参考)】
[ Back to top ]