
車両用情報伝達制御装置、及び、情報伝達制御方法
【課題】運転行動に不要な情報に誘目され、運転行動を阻害されることを防止するための技術を提供する。
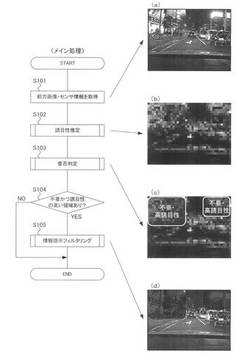
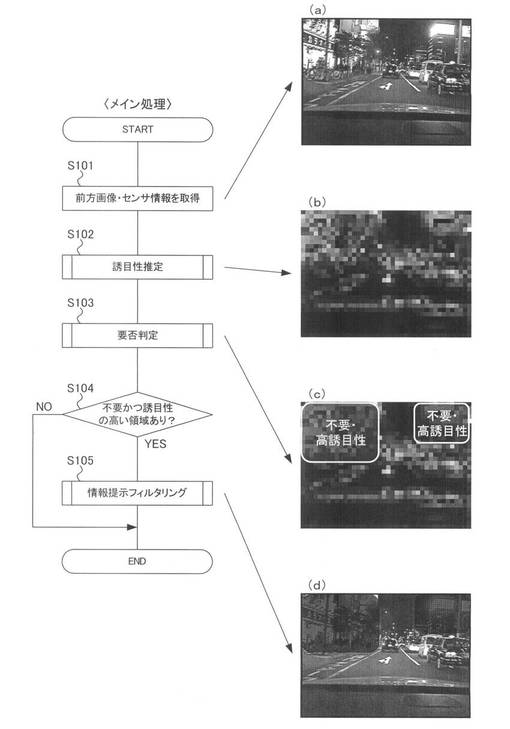
【解決手段】車載カメラで自車両前方の運転視界画像を撮像し(S101)、その運転視界画像上において運転者の注意を強く引く高誘目性領域を推定する(S102)。つぎに、推定した高誘目性領域が運転行動に必要な情報であるか否かを判定する(S103)。要否の判定は、運転視界画像上の高誘目性領域と、注意領域認識部30において認識された注意領域との位置関係に基づいて行う。そして、前記要否判定の結果において運転支援画像上において運転行動に不要で、かつ誘目性の高い領域が存在する場合(S104:YES)、運転視界画像から特定された情報提示フィルタリングの対象となる領域に対応するマスク表示部の該当領域に、運転視界の視認性を低下させるマスク画像を表示する(S105)。
【解決手段】車載カメラで自車両前方の運転視界画像を撮像し(S101)、その運転視界画像上において運転者の注意を強く引く高誘目性領域を推定する(S102)。つぎに、推定した高誘目性領域が運転行動に必要な情報であるか否かを判定する(S103)。要否の判定は、運転視界画像上の高誘目性領域と、注意領域認識部30において認識された注意領域との位置関係に基づいて行う。そして、前記要否判定の結果において運転支援画像上において運転行動に不要で、かつ誘目性の高い領域が存在する場合(S104:YES)、運転視界画像から特定された情報提示フィルタリングの対象となる領域に対応するマスク表示部の該当領域に、運転視界の視認性を低下させるマスク画像を表示する(S105)。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の乗員に対する情報伝達を制御するための技術に関する。
【背景技術】
【0002】
従来、車両の乗員に対して周辺状況に関する情報を提供する技術として、例えば、特許文献1に記載の車両用情報提供装置が知られている。この車両用情報提供装置では、運転者が注視すべき対象の視認性や誘目性に応じて、情報提示の方法や強度を変更する。
【0003】
具体的には、対象物の視認性や誘目性が低いと推定した場合には、対象物の位置や属性を示す情報提示を積極的に行い、対象物の視認性や誘目性が高いと推定した場合には、車両用情報提供装置が行う情報提示を一部抑制する。このようにすることで、運転者に対して情報を提供する際に、ドライバが煩わしく感じないようにできるとしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−30212号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来技術では、対象物の視認性や誘目性の度合に応じて情報提示の方法や強度を変更するものであり、情報提示による煩わしさを低減できるとはいえ、本質的には運転者に伝達される情報を増やすことで運転支援を行うものであることには変わりない。運転者に伝達される情報が増えれば、運転者の情報処理能力にかかる負荷も相応に増えることになる。昨今の運転支援システムでは、多くの情報を運転者に対して提示しており、運転者の情報処理能力にかかる負担が過大になることが懸念される。
【0006】
そこで、運転行動に不要な情報の伝達を抑制することで運転者の情報処理能力にかかる負担を軽減し、運転者の運転行動を支援する技術の開発が望まれる。
本発明は、上記課題を解決するためになされたものであり、運転行動に不要な情報に誘目され、運転行動を阻害されることを防止するための技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するためになされた請求項1に記載の車両用情報伝達制御装置は、車両の運転視界を撮像した画像情報から、運転者に対する誘目性が高く、かつ運転行動に不要と推定される高誘目性領域を特定し、その高誘目性領域に対応する運転視界の該当領域から運転者に伝達される視覚的情報に対して、運転者からの視認性を低下させるフィルタをかけることで当該視覚的情報の運転者への伝達を抑制することを特徴とする。
【0008】
また、請求項2に記載の車両用情報伝達制御装置は、誘目性領域特定手段と、要否判定手段と、フィルタリング手段とを備えることを特徴とする。誘目性領域特定手段は、車両の運転視界を撮像した画像情報から、運転者に対する誘目性が高いと推定される高誘目性領域を特定する。要否判定手段は、誘目性領域特定手段により特定された高誘目性領域に含まれる視覚的情報が運転行動に必要であるか否かを判定する。フィルタリング手段は、要否判定手段による判定の結果、運転行動に不要であると判断された高誘目性領域に対応する運転視界の該当領域から運転者に伝達される視覚的情報に対して、運転者からの視認性を低下させるフィルタをかける。
【0009】
本発明の車両用情報伝達制御装置によれば、外部から運転者にもたらされる様々な視覚的情報のうち、運転行動に不必要でかつ誘目性の高いと判断した視覚的情報の視認性を低下させることで、それらの視覚的情報の伝達を抑制できる。これにより、運転中に注意を向けるべきでない対象物に運転者が誘目されるのを防止でき、運転者を運転行動に集中させることができる。また、本発明は、従来のように運転者に対して能動的に情報を提供して運転支援を行うものとは異なり、外部からの不要な情報の伝達を抑制する、言い換えれば、不要な情報を間引くことで運転者の情報処理能力への負担を軽減できる。
【0010】
ところで、車両の運転視界を撮像した画像情報から誘目性の高い領域を特定する手法としては、画像情報における輝度、色、勾配、動きの少なくとも何れかの特徴量に基づく画像の顕著性を導出し、その顕著性に基づいて高誘目性領域を特定することが考えられる(請求項3)。
【0011】
人間の視覚は、光の色や強度、周囲との変化率(勾配)、時間的変化(動き)等といった様々な特徴量の時空間的変化が顕著な部分に注意を引かれる(誘目される)働きを持つことが知られている。そこで、運転視界を撮像した画像情報から、画像の輝度、色、勾配、動き等の特徴量に基づき、それらの時空間的変化の顕著性が高い部分を高誘目性領域と特定することで、運転者が誘目されやすい対象物を的確に特定できる。
【0012】
つぎに、請求項4に記載の発明は、運転視界の画像情報における運転者が注意すべき注意領域と、高誘目性領域との位置関係に応じて、当該高誘目性領域に含まれる視覚的情報が運転行動に必要であるか否かを判定することを特徴とする。
【0013】
車両を運転する場合、目に映るもの全に対してそれが何かを判断して注意を払っていては、急激な状況変化に対して判断が間に合わなくなるおそれがあるため、運転行動に必要な対象物に絞って注意を払うことが肝要となる。そのような観点から、運転視界を撮像した画像情報において運転者が注意すべき領域と、高誘目性領域との位置関係に応じて、当該高誘目性領域に含まれる視覚的情報が運転行動に必要であるか否かを判断するとよい。
【0014】
ここでいう運転者が注意すべき領域とは、例えば、車両の進行方向前方等の予め決められた範囲や、注意すべき対象物として検出した対象物が存在する範囲等が挙げられる。そして、画像情報から検出された高誘目性領域の位置が、それらの注意領域の位置に該当する場合、その高誘目性領域は運転行動に必要なものであると判断し、注意領域の位置に該当しない場合、その高誘目性領域が運転行動に不要なものであると判断すればよい。
【0015】
さらに、請求項5に記載の発明は、自車両の運転視界内に存在する交通参加者や特定の道路構造物を含む注意対象物を認識する認識手段を備え、要否判定手段は、認識手段によって認識された注意対象物が存在する画像情報における領域を注意領域として、その注意領域を除く範囲にある高誘目性領域を運転行動に不要であるものと判定することを特徴とする。
【0016】
このようにすることで、歩行者や他車両等の交通参加者や、運転者の注意を引くべき設けられた交通信号機、交通標識、道路標示、道路形状といった道路構造物等が検出された範囲といった運転行動において運転者が注意すべき対象物の視覚的情報はそのままに、それ以外の誘目されやすい視覚的情報の伝達を低減できる。これにより、運転行動において注意すべき交通参加者や道路構造物に対して運転者が注意を集中しやすくなる。
【0017】
ところで、運転行動に不要でかつ誘目性の高い視覚的情報の視認性を低減するフィルタリング手段としては、運転者から見える運転視界に重ねて設けられた表示領域を備える表示手段において、フィルタリングの対象となる前記視覚的情報の位置に対応する表示領域に透過率を低下させるマスク画像を表示する構成とすることが考えられる(請求項6)。
【0018】
このようなフィルタリング手段に用いられる表示手段としては、例えば、車両のフロントガラスに貼付け又は直近に設置して使用する透明のウィンドシールドディスプレイや、運転者の頭部に装着するヘッドマウントディスプレイ等が挙げられる。このような表示装置を用いる場合、フィルタリングすべき視覚的情報の位置を運転者からみた運転視界の位置に変換し、当該位置にマスクを提示することで、視覚的情報のフィルタリングが実現する。
【0019】
さらに、フィルタリング手段によるマスク画像の表示方法を工夫することが考えられる。具体的には、フィルタリング手段は、マスク画像を表示すべき表示範囲の中央部から、その表示範囲と非表示範囲との境界に向けて透過率を連続的に高くした前記マスク画像を表示する(請求項7)。このようにすることで、マスク画像の表示範囲とマスク画像を表示しない非表示範囲との境界において両者の透過率の差を小さくし、境界を目立たなくすることができる。そうすることで、マスク画像を表示した際に、表示範囲と非表示範囲との境界に運転者が誘目されるのを防ぐと共に、マスク画像を表示することにより運転者に与える違和感を低減できる。
【0020】
さらに、マスク画像の表示方法に関する工夫として、運転行動のために注意すべき所定領域の画像情報上におけるコントラストの高低度合と、フィルタリングの対象となる視覚的情報の画像情報上におけるコントラストの高低度合に応じて、マスク画像の透過率の高低度合を設定し、その設定した透過率でマスク画像を表示する構成であってもよい(請求項8)。
【0021】
例えば、マスク画像によりフィルタリングを施した視覚的情報が、運転行動のために注意すべき所定領域よりも相対的に目立たなくなるような透過率を設定すれば、運転行動に不要な領域の情報に誘目されることなく、運転行動のために注意すべき領域の情報を認識しやすくなると考えられる。
【0022】
そのためには、運転行動のために注意すべき所定領域のコントラストと、フィルタリングの対象となる視覚的情報のコントラストとの対比に基づき、マスク画像によりフィルタリングを施して透過率を下げた状態を想定した当該視覚的情報のコントラストが、運転行動のために注意すべき所定領域のコントラストよりも低くなるようにマスク画像の透過率を設定すればよい。
【0023】
あるいは、フィルタリング手段は、自車両の速度の高低度合に応じて、前記マスク画像の透過率の高低度合を設定し、その設定した透過率で前記マスク画像を表示するような構成であってもよい(請求項9)。
【0024】
例えば、車両が低速で走行している場合、運転者が視覚的情報を認識し、それを運転行動に反映させるのに時間的な余裕がある(運転者の負担が少ない)。そのため、様々な対象物に多少誘目されても、運転行動のための運転者の判断が間に合うため大きな問題はない。そこで、低速走行時には、例えば、フィルタリングに使用するマスク画像の透過率を比較的高めに設定することで、運転視界全体の見通しをよくすることが考えられる。また、停止時には、透過率を最大(フィルタリング効果なし)にしてもよい。
【0025】
一方、車両が高速で走行している場合、運転行動のための判断に費やせる時間が短くなる(運転者の負担が多い)。そのため、少しの脇見をしただけでも運転行動のために必要な判断が間に合わなくなるおそれがある。そこで、高速走行時には、例えば、フィルタリングに使用するマスク画像の透過率を比較的低目に設定することで、運転行動に必要な領域以外になるべく誘目されないようにすることが考えられる。
【0026】
このように、自車両の速度の高低度合に応じてマスク画像の透過率の高低度合を設定することで、車両の速度による運転負担の度合に応じた態様にて、運転者の情報処理能力の負担を軽減できる。
【0027】
つぎに、請求項10に記載の情報伝達制御方法は、車両の運転視界を撮像した画像情報から、運転者に対する誘目性が高いと推定される高誘目性領域を特定する誘目性領域特定手順と、誘目性領域特定手順において特定された高誘目性領域に含まれる視覚的情報が運転行動に必要であるか否かを判定する要否判定手順と、要否判定手順における判定の結果、運転行動に不要であると判断された高誘目性領域に対応する運転視界の該当領域から運転者に伝達される視覚的情報に対して、運転者からの視認性を低下させるフィルタをかけるフィルタリング手順とを有することを特徴とする。このような手順を有する情報伝達制御方法によれば、本発明の車両用情報伝達制御装置について上述した効果を得ることができる。
【図面の簡単な説明】
【0028】
【図1】実施形態の車両用情報伝達制御装置のシステム構成を示すブロック図である。
【図2】誘目性を推定するための顕著性マップの概要を示す説明図である。
【図3】高誘目性領域の要否判定の概要を示す説明図である。
【図4】情報提示フィルタリングの概要を示す説明図である。
【図5】マスク画像の表示方法の概要を示す説明図である。
【図6】メイン処理の手順を示すフローチャートである。
【図7】誘目性推定処理の手順を示すフローチャートである。
【図8】解像度ピラミッド(ガウシアン・ピラミッド)の概要を示す説明図である。
【図9】要否判定処理の手順を示すフローチャートである。
【図10】注意領域推定処理の手順を示すフローチャートである。
【図11】情報提示フィルタリング処理の手順を示すフローチャートである。
【図12】例外処理の手順を示すフローチャートである。
【図13】透過率設定処理の手順を示すフローチャートである。
【図14】運転時の視線分布の解析結果を示す説明図である。
【図15】情報提示フィルタリングによる効果の実証結果を示す説明図である。
【図16】情報提示フィルタリングによる効果の実証結果を示す説明図である。
【図17】情報提示フィルタリングによる効果の実証結果を示す説明図である。
【図18】情報提示フィルタリングとルームミラー、サイドミラーとの兼ね合いを示す説明図である。
【発明を実施するための形態】
【0029】
以下、本発明の一実施形態を図面に基づいて説明する。なお、本発明は下記の実施形態に何ら限定されるものではなく様々な態様にて実施することが可能である。
[車両用情報伝達制御装置のシステム構成の説明]
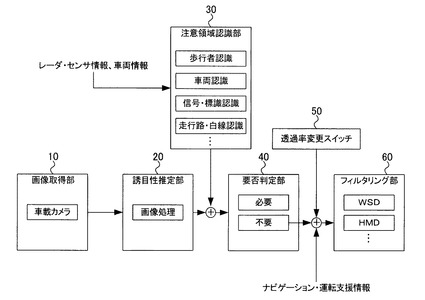
本発明が適用された車両用情報伝達制御装置のシステム構成について、図1に基づき説明する。本実施形態の車両用情報伝達制御装置は、車両に搭載される運転支援システムであり、図1に示すように、画像取得部10と、誘目性推定部20と、注意領域認識部30と、要否判定部40と、透過率変更スイッチ50と、フィルタリング部60とを備える。
【0030】
画像取得部10は、自車両前方を撮像する車載カメラ等の撮像手段により構成されている。この車載カメラは、CCDイメージセンサやCMOSイメージセンサ、及び被写体からの光をイメージセンサ上に集光するレンズ等を用いて構成された周知のものであり、運転者から見える自車両前方の運転視界全体が撮像範囲内に含まれるように、自車両前方に向けて配置されている。
【0031】
誘目性推定部20、注意領域認識部30、及び要否判定部40は、CPU,ROM,RAM,I/O等を備えた周知の情報処理装置(例えば、マイクロコンピュータ)として構成されている。
【0032】
このうち、誘目性推定部20は、画像取得部10から入力された撮像画像を画像処理によって解析し、運転者に対する誘目性が高いと推定される高誘目性領域を特定する機能を担う。誘目性の推定には、人間の注意を強く引く対象を見つけるための仕組みとして考案された「顕著性マップ」(Laurent Itti, Christof Koch, Ernst Niebur, "A model of saliency-based visual attention for rapid scene analysis," IEEE Trans. Pattern Analysis and Machine Intelligence, vol.20, no.11, pp.1254-1259, 1998.)の仕組みを利用する。
【0033】
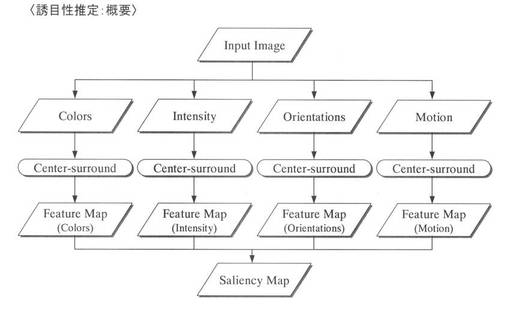
ここで顕著性マップ(Saliency Map)の概要について、図2に基づいて説明する。図2に示すように、顕著性マップは、画像の色(Colors)、輝度(Intensity)、勾配(Orientations)、動き(Motion)といった人間が本能的に注意を引かれる各要素について、その特徴性を示す特徴マップ(Feature Map)をそれぞれ作成し、それらを重ね合わせて画像上の注意を引く箇所を特定できるようにしたものである。顕著性マップの生成に使われる特徴マップは、画像の解像度の縮小処理を段階的に繰り返して得られる画像群(ガウシアン・ピラミッド)から解像度の異なるペアを使って差異を求めるCenter-Surround Operationと呼ばれる手法によって作成される。
【0034】
図1の説明に戻る。注意領域認識部30は、画像取得部10から入力された撮像画像の中から、運転行動に必要な情報、すなわち、運転行動に際して運転者が注意すべき対象物や範囲が映っている注意領域を認識する。本実施形態では、注意領域として認識する対象物や範囲として、歩行者や自転車、二輪車、自動車といった交通参加者、及び、交通信号機や交通標識、道路標示、走行路の形状や白線といった道路構造物を想定している。また、これらの注意領域を認識するために、画像取得部10による撮像画像からの画像認識に加えて、図示しないミリ波レーダやレーザレーダ等を用いた物体認識や、ステアリングの舵角等の車両情報を用いた走行路認識(進行方向判定)等を用いてもよい。
【0035】
要否判定部40は、誘目性推定部20において推定された高誘目性領域と、注意領域認識部30において認識された注意領域との位置関係から、高誘目性領域が運転行動に必要な情報であるか否かを判定する。
【0036】
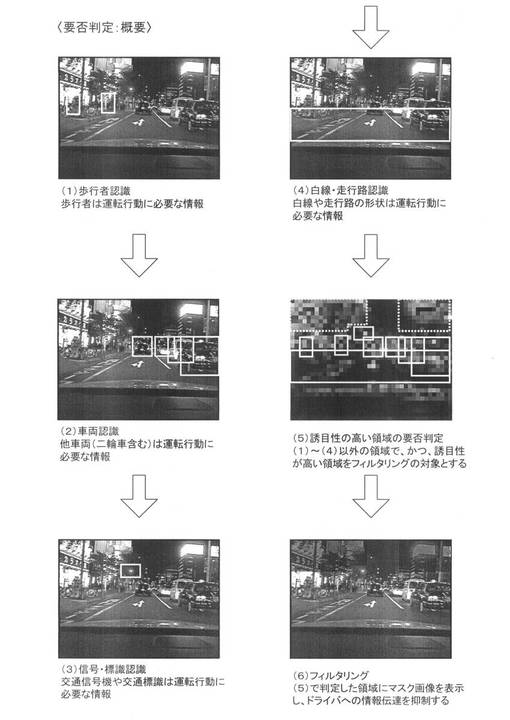
ここで、要否判定部40において実行される要否判定の概要について、図3を参照しながら説明する。要否判定は、まず、図3(1)〜(4)の手順のように、注意領域認識部30において運転視界の撮像画像上にある注意領域を認識した上で、図3(5)の手順で注意領域と高誘目性領域との位置関係から、高誘目性領域が運転行動に必要な情報であるか否かを判定する。
【0037】
図3(1)歩行者認識:安全運転のためには歩行者の存否や位置を把握しておく必要がある。よって、運転視界の撮像画像内に存在する歩行者を検出し、運転行動に必要な注意領域として認識する。
【0038】
図3(2)車両認識:安全運転のためには他車両(二輪車を含む)の存否や位置を把握しておく必要がある。よって、運転視界の撮像画像内に存在する車両を検出し、運転行動に必要な注意領域として認識する。
【0039】
図3(3)信号・標識認識:交通信号機や交通標識は、自車両の走行方法を選択する上で不可欠な情報である。よって、運転視界の撮像画像内に存在する交通信号機や交通標識を検出し、運転行動に必要な注意領域として認識する。
【0040】
図3(4)白線・走行路認識:走行路に設けられた白線や道路標示、あるいは走行路の形状は、自車両の速度や舵角を決定する上で不可欠な情報である。よって、運転視界の撮像画像内に白線や道路標示、走行路を検出した場合、それらを内包する領域を運転行動に必要な注意領域として認識する。
【0041】
図3(5)誘目性の高い領域の要否判定:上記(1)〜(4)で認識した注意領域は、運転行動における必要性が高い一方、それ以外の領域は運転行動における必要性は相対的に低い。そこで、誘目性推定部20による高誘目性領域の推定結果と、注意領域認識部30による認識結果とに基づき、高誘目性領域の要否判定を行う。その結果、注意領域以外の運転行動に不要な領域で、かつ高誘目性領域に該当する領域(図3(5)において点線で囲んだ領域)を抽出し、この領域を情報提示フィルタリングの対象とする。
【0042】
要否判定部40による要否判定の結果を受けて、フィルタリング部60は、情報提示フィルタリングの対象となる領域に対応する運転視界の該当領域に視認性を低下させるマスク画像を表示し、当該領域からの視覚的情報の運転者への伝達を抑制する(図3(6):フィルタリング)。
【0043】
図1の説明に戻る。透過率変更スイッチ50は、情報提示フィルタリングの強度をユーザが設定するための操作スイッチである。この透過率変更スイッチ50を操作することで、「透過率:高め」の設定を有効にすることができるようになっている。「透過率:高め」の設定が有効になっていると、情報提示フィルタリングの対象となる範囲に表示するマスク画像の透過率を通常よりも高くすることができ、これにより、必要に応じて情報提示フィルタリングの強度を意図的に低減できるようになっている。
【0044】
フィルタリング部60は、車両のフロントウィンドウ(ウインドシールド)に沿って設けられるウインドシールドディスプレイ(WSD)や、運転者の頭部に装着されるヘッドマウントディスプレイ(HMD)からなるマスク画像の表示部と、表示部の作動を制御する制御部からなる表示装置である。
【0045】
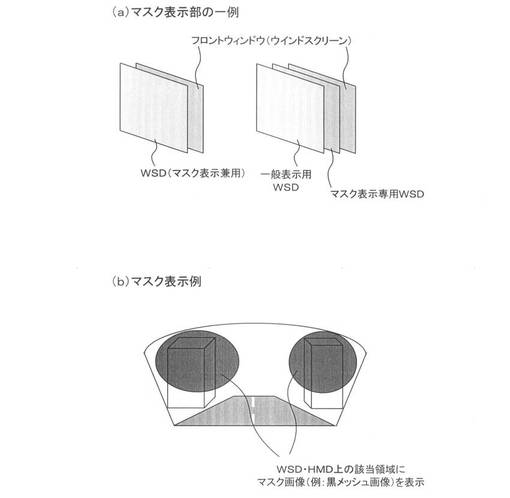
図4(a)は、マスク表示部の一例であり、フロントウィンドウに沿って設けられるWSDを用いた事例を示すものである。WSDは、運転者に視覚情報支援を行うための画像提示装置として、フロントウィンドウに広範囲に情報を映し出すことができる。これは、フロントウィンドウ越しにCG画像を現実の運転視界に重畳して表示可能なシースルー型の情報提示手段である。WSDでは、現実の景色をスクリーン越しに直接見るようになっており、現実の景色に仮想的な画像を重畳できるという利点がある。
【0046】
本実施形態のフィルタリング部60としては、一般用の情報提示と、情報提示フィルタリング用のマスク画像の表示とで1つのWSDを兼用するような構成であってもよいし、一般表示用のWSDと、マスク画像表示専用のWSDとをそれぞれ別個に備えるような構成であってもよい。
【0047】
図4(b)は、WSDやHMD等の表示部におけるマスク画像の表示例である。運転視界の撮像画像上で特定されたフィルタリングの対象領域の位置を、WSDやHMD等における表示範囲に変換し、その該当領域にマスク画像を表示する。マスク画像は、視覚的情報の伝達を完全に遮断するものではなく、例えば黒のメッシュ画像のように光の透過率を低下させて視覚的情報の伝達を一部抑制するものを用いる。また、高誘目性領域のコントラストやその他の外的な事情に応じて、マスク画像の透過性を変更する。
【0048】
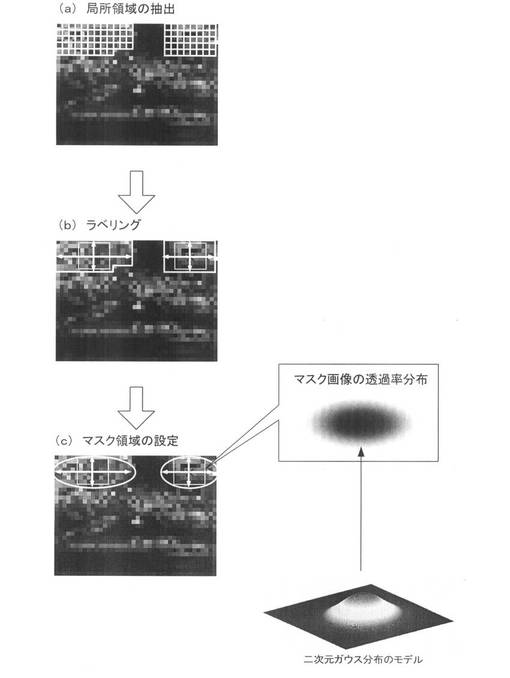
つぎに、マスク画像の具体的な表示方法について、図5を参照しながら説明する。マスク画像の表示は、図5(a)に示す局所領域の抽出、図5(b)に示すラベリング、図5(c)に示すマスク領域の設定の各手順を経て行われる。各手順の内容は以下のとおりである。
【0049】
(a)局所領域の抽出:注意領域以外の運転行動に不要な領域で、かつ誘目性推定部20において生成された顕著性マップにおける顕著度が予め設定された閾値よりも大きい局所領域を抽出する。
【0050】
(b)ラベリング:上記(a)の手順で抽出した局所領域群にラベリング処理を施す。ここでは、連続する局所領域ごとに同一の識別番号を割り当て、同一の識別番号を有する局所領域群を1つの領域として見なす。また、ラベリング処理によって得られた各領域の重心位置や縦横のサイズを抽出する。
【0051】
(c)マスク領域の設定:上記(b)の手順で得られた各領域の重心位置及び縦横のサイズに合わせて、二次元ガウス分布に基づくマスク画像の透過率分布を設定する。二次元ガウス分布のモデルでは、中心(=領域の重心位置)に近い程確率が高く、中心から離れた周辺領域になる程確率が低くなる。すなわち、二次元ガウス分布のモデルにおいて確率が高い程、マスク画像の透過率を低く、確率が低い程、マスク画像の透過率を高く設定する。このように、マスク画像の中央部から周辺部に向けて透過率を連続的に高くして境界部分の透過率をその周辺とほぼ同じにすることで、マスク画像の境界に運転者が注意を引かれないようにできる。
【0052】
[メイン処理の説明]
つぎに、実施形態の車両用情報伝達制御装置の各部において実行されるメイン処理の手順について、図6のフローチャートを参照しながら説明する。この処理は、車両の走行中において所定時間ごとに繰返し実行される。
【0053】
まず、画像取得部10において自車両前方の運転視界画像を取得する(S101)。図6(a)は運転視界画像の一例である。また、歩行者や他車両といった交通参加者を検知するためのレーダ・センサ類からの検知情報も併せて取得する。
【0054】
つぎに、誘目性推定部20は、S101で取得された運転視界画像上において運転者の注意を強く引く高誘目性領域を推定する誘目性推定処理を実行する(S102)。誘目性の推定は、運転視界画像を画像処理して顕著性マップを作成することにより行う。図6(b)は運転視界画像から作成された顕著性マップの一例である。この顕著性マップでは、誘目性の高低度合が画像の濃淡として表されている。なお、誘目性推定処理の詳細な内容については後述する。
【0055】
つぎに、要否判定部40は、S102で推定された運転視界画像における高誘目性領域が運転行動に必要な情報であるか否かを判定する要否判定処理を実行する(S103)。要否の判定は、運転視界画像の顕著性マップから特定された運転視界画像上の高誘目性領域と、注意領域認識部30において認識された注意領域との位置関係に基づいて行う。図6(c)は要否判定結果の一例である。なお、要否判定処理の詳細な内容については後述する。
【0056】
そして、S104の判断ステップでは、S103の要否判定の結果から運転支援画像上において運転行動に不要で、かつ誘目性の高い領域が存在するか否かを判断する。運転行動に不要で、かつ誘目性の高い領域が存在する場合(S104:YES)、S105の処理へ進み、存在しない場合(S104:NO)、本処理を終了する。
【0057】
S104で肯定判定をした場合に進むS105では、要否判定処理(S103)の結果を受けて、フィルタリング部60が情報提示フィルタリング処理を実行し、その後、本処理を終了する。この情報提示フィルタリング処理では、運転視界画像から特定された情報提示フィルタリングの対象となる領域に対応するマスク表示部の該当領域に、運転視界の視認性を低下させるマスク画像を表示する。図6(d)は、運転行動に不要でかつ誘目性が高いと推定された運転視界の一部領域に重畳してマスク画像を表示した事例である。この事例では、運転視界の左上部及び右上部に光の透過率を低下させるマスク画像が表示されている。これにより、周辺の建物の照明やネオンサイン、電光掲示板といった運転行動に不要でかつ誘目性の高い視覚的情報の伝達が抑制されている。なお、情報提示フィルタリング処理の詳細な内容については後述する。
【0058】
[誘目性推定処理の説明]
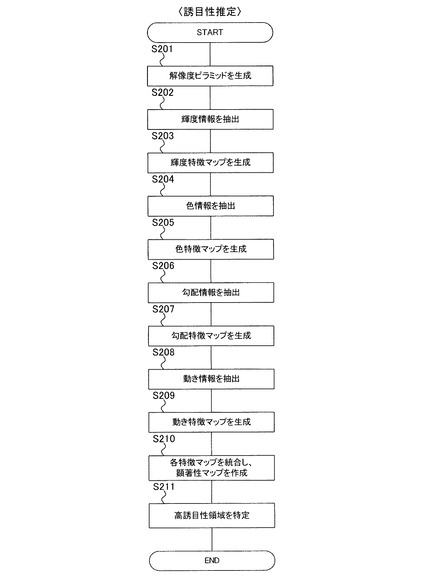
上述のメイン処理のS102で実行される誘目性推定処理の手順について、図7のフローチャートを参照しながら説明する。
【0059】
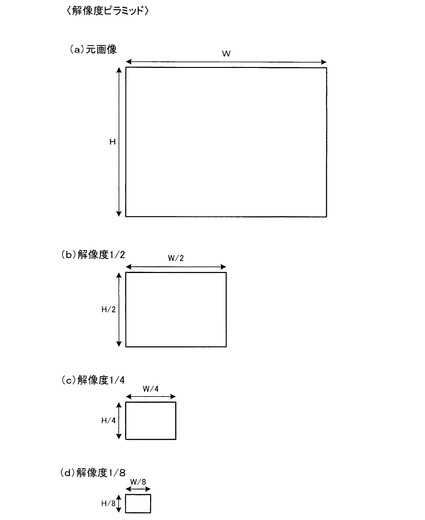
誘目性推定部20は、まず、画像取得部10で取得した運転視界の撮像画像を処理して、解像度の異なる複数の画像からなる解像度ピラミッドを生成する(S201)。ここでは、図8に示すように、元画像に縮小処理を繰り返すことで、解像度を1/2、1/4、1/8…と小さくした画像群を生成する。このような画像を解像度順に重ねていくとピラミッドのような階層構造になるので、このような画像群は解像度ピラミッドと呼ばれる。
【0060】
つぎに、S201で生成した解像度ピラミッドの各階層の画像から、各画像の各点の輝度情報を抽出する(S202)。そして、その抽出した各画像の各点の輝度情報から、画像の輝度に関する特徴性を示す輝度特徴マップを生成する(S203)。ここでは、解像度ピラミッドにおいて解像度の異なる画像のペアを複数使って、画像の各点における輝度の差異を求め、その結果を元に輝度特徴マップを得ることができる。
【0061】
つぎに、S201で生成した解像度ピラミッドの各階層の画像から、各画像の各点の色(赤、緑、青、あるいは彩度、色相)情報を抽出する(S204)。そして、その抽出した各画像の各点の色情報から、画像の色に関する特徴性を示す色特徴マップを生成する(S205)。ここでは、解像度ピラミッドにおいて解像度の異なる画像のペアを複数使って、画像の各点における色の差異を求め、その結果を元に色特徴マップを得ることができる。
【0062】
つぎに、S201で生成した解像度ピラミッドの各階層の画像から、各画像の各点の勾配情報を抽出する(S206)。画像の勾配とは、各画素値の変化の度合を示すものである。そして、その抽出した各画像の各点の勾配情報から、画像の勾配に関する特徴性を示す勾配特徴マップを生成する(S207)。ここでは、解像度ピラミッドにおいて解像度の異なる画像のペアを複数使って、画像の各点における勾配の差異を求め、その結果を元に勾配特徴マップを得ることができる。
【0063】
つぎに、S201において時系列の複数の撮像画像から生成した時系列の複数の解像度ピラミッドにおける各階層の画像から、各画像の各点の時空間的変化(動き情報)を抽出する(S208)。そして、その抽出した各画像の各点の動き情報から、画像の動きに関する特徴性を示す動き特徴マップを生成する(S209)。ここでは、解像度ピラミッドの時系列に基づき、各階層画像の各点において方向及び速度の成分を計算し、その結果を元に動き特徴マップを得ることができる。
【0064】
つぎに、S203,S205,S207,S209の各ステップで生成した各特徴マップを重ね合わせて統合することで、運転視界画像に関する顕著性マップを作成する(S210)。この顕著性マップにより、運転視界画像について誘目されやすさの度合を推定した結果が得られる。そして、顕著性マップで所定の閾値より高い値を示す箇所に該当する画像領域を高誘目性領域として特定し(S211)、本処理を終了する。
【0065】
[要否判定処理の説明]
上述のメイン処理のS103で実行される要否判定処理の手順について、図9のフローチャートを参照しながら説明する。
【0066】
要否判定処理においては、まず、注意領域認識部30で注意領域推定処理が実行される(S301)。この注意領域推定処理については、参照先を図10のフローチャートに移して説明をする。
【0067】
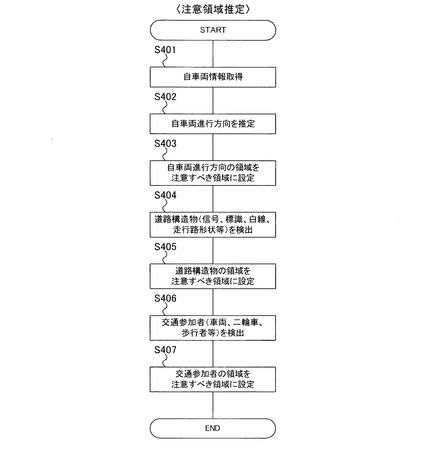
図10のフローチャートに示すように、注意領域認識部30は、まず、現在の操舵角等、自車両の進行方向を推定するための車両情報を取得する(S401)。つぎに、S401で取得した車両情報に基づいて自車両の現在の進行方向を推定する(S402)。そして、画像取得部10により取得された運転視界画像において自車両の進行方向前方に該当する領域を注意領域に設定する(S403)。
【0068】
つぎに、運転視界画像から、交通信号機、交通標識、道路標示、白線及び走行路の形状等の道路構造物を画像認識により検出する(S404)。そして、S404で検出した道路構造物に該当する運転視界画像の領域を注意領域に設定する(S405)。
【0069】
つぎに、運転視界画像における画像認識や、レーダ・センサ類による検出情報から、車両、二輪車及び歩行者等の交通参加者を検出する(S406)。そして、S406で検出した交通参加者に該当する運転視界画像の領域を注意領域に設定し(S407)、本処理を終了する。
【0070】
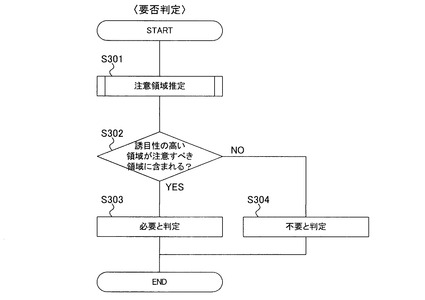
図9のフローチャートの説明に戻る。S302では、上述の誘目性推定処理(図7参照)において推定された各高誘目性領域と、S301の注意領域推定処理において推定された各注意領域との位置関係を比較し、それぞれの高誘目性領域が注意領域に含まれているか否かを判定する。高誘目性領域が注意領域に含まれている場合(S302:YES)、その部分の高誘目性領域については運転行動に必要な情報であると特定する(S303)。一方、高誘目性領域が注意領域に含まれていない場合(S302:NO)、その部分の高誘目性領域については運転行動に不要な情報であると特定する(S304)。
【0071】
[情報提示フィルタリング処理の説明]
上述のメイン処理のS105で実行される情報提示フィルタリング処理の手順について、図11のフローチャートを参照しながら説明する。
【0072】
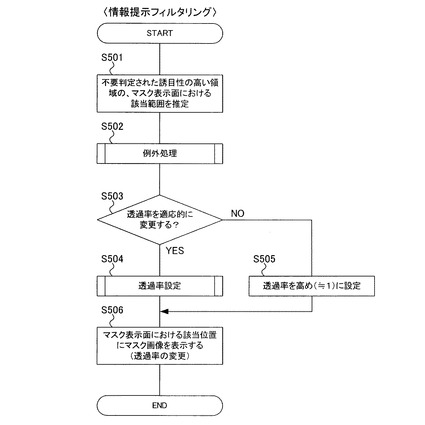
フィルタリング部60では、まず、要否判定部40による処理結果を受けて、不要判定された高誘目性領域の位置を、マスク表示部における位置に変換する(S501)。ここでは、運転視界画像上で特定された高誘目性領域の位置と、運転者から見た運転視界の位置とが同じになるように、マスク表示部における当該範囲を推定する。
【0073】
つぎに、表示するマスク画像の透過率に例外条件を適用するか否かを判断する例外処理を実行する(S502)。この例外処理については、参照先を図12のフローチャートに移して説明をする。
【0074】
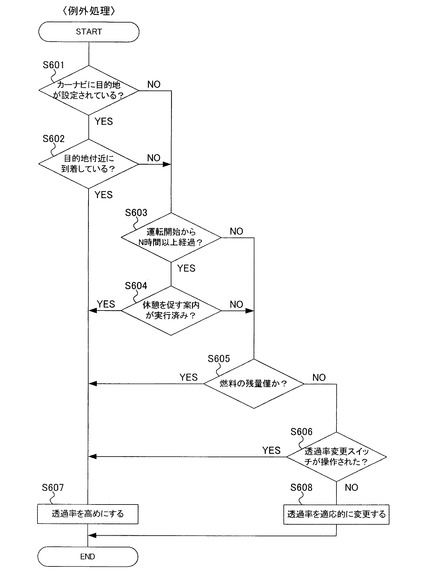
図12のフローチャートに示すように、運転者に対して目的地までの経路案内を行う車載ナビゲーション装置(図示なし)から取得したナビゲーション情報に基づき、経路案内の目的地が設定されているか否かを判定する(S601)。目的地が設定されている場合(S601:YES)、S602の処理へ進み、目的地が設定されていない場合(S601:NO)、S603の処理へ進む。
【0075】
目的地が設定されている場合に進むS602では、ナビゲーション情報に基づいて、自車両が目的地付近に到着している状態であるか否かを判定する。目的地付近に到着している場合(S602:YES)、S607の処理へ進み、目的地付近に到着していない場合(S602:NO)、S603の処理へ進む。
【0076】
自車両が目的地付近に到着している場合に進むS607では、情報提示フィルタリングのために表示するマスク画像の透過率を高め(≒1)にする設定を有効にする。このように、車載ナビゲーション装置において目的地が設定されており、かつ、自車両が目的地付近に到着している場合、運転者が不慣れな道で目的地を探すために周辺の景色に意図的に注意を向けている状況にあると予想される。このような状況では、マスク画像の透過率をほぼ全透過に近い値に設定することで、運転者が見たい情報が抑制されてしまうのを防止できる。
【0077】
一方、S601又はS602で否定判定をした場合に進むS603では、運転時間の管理を行う別の運転支援機器(図示なし)から取得した運転支援情報に基づき、運転者が運転を開始してからの経過時間がN時間(Nは予め設定された時間)以上経過しているか否かを判定する。運転開始からの経過時間がN時間以上である場合(S603:YES)、S604の処理へ進み、運転開始からの経過時間がN時間未満である場合(S603:NO)、S605の処理へ進む。
【0078】
運転開始からの経過時間がN時間以上である場合に進むS604では、運転時間の管理を行う運転支援機器において休憩を促す案内が実施済みであるか否かを判定する。休憩を促す案内が実施済みである場合(S604:YES)、S607の処理へ進み、休憩を促す案内がまだ実施されていない場合(S604:NO)、S605の処理へ進む。
【0079】
休憩を促す案内が実施済みである場合に進むS607では、情報提示フィルタリングのために表示するマスク画像の透過率を高め(≒1)にする設定を有効にする。このように、運転開始から長時間が経過しており、かつ、休憩を促す案内が実施されている場合、運転者が休憩するための施設を探すために周辺の景色に意図的に注意を向けている状況にあると予想される。このような状況では、マスク画像の透過率をほぼ全透過に近い値に設定することで、運転者が見たい情報が抑制されてしまうのを防止できる。
【0080】
一方、S603又はS604で否定判定をした場合に進むS605では、燃料計から取得した情報に基づき、燃料の残量が僅少になっているか否かを判定する。燃料の残量が僅少になっている場合(S605:YES)、S607の処理へ進み、燃料の残量が僅少ではない場合(S605:NO)、S606の処理へ進む。
【0081】
燃料の残量が僅少になっている場合に進むS607では、情報提示フィルタリングのために表示するマスク画像の透過率を高め(≒1)にする設定を有効にする。このように、燃料が僅少になっている場合、運転者は燃料を補給できる給油施設や充電施設を探すために周辺の景色に意図的に注意を向けている状況にあると予想される。このような状況では、マスク画像の透過率をほぼ全透過に近い値に設定することで、運転者が見たい情報が抑制されてしまうのを防止できる。
【0082】
一方、S605で否定判定をした場合に進むS606では、透過率変更スイッチ50が操作されている、すなわち、「透過率:高め」の設定が有効にされているか否かを判定する。透過率変更スイッチ50の操作により「透過率:高め」の設定が有効にされている場合(S605:YES)、S607の処理へ進み、情報提示フィルタリングのために表示するマスク画像の透過率を高め(≒1)にする設定を有効にする。このように、ユーザが透過率変更スイッチ50を操作することにより、意図的にマスク画像の透過率をほぼ全透過に近い値に設定することができる。
【0083】
一方、透過率変更スイッチ50において「透過率:高め」の設定が無効にされている場合(S605:NO)、S608の処理へ進み、情報提示フィルタリングのために表示するマスク画像の透過率を適応的に変更する設定を有効にする(例外の適用なし)。
【0084】
図11のフローチャートの説明に戻る。次のS503では、先のS502の例外処理の結果において透過率を適応的に変更する設定が有効になっているか否かを判定する。透過率を適応的に変更する設定が有効になっている場合(S503:YES)、S504の処理へ進み、透過率を高めにする設定が有効になっていない場合(S503:NO)、S505の処理へ進む。
【0085】
透過率を適応的に変更する設定が有効になっている場合に進むS504では、マスク対象領域(不要判定された高誘目性領域)ごとにマスク画像の透過率を決定するための透過率設定処理を実行し、その後、S506の処理へ進む。この透過率設定処理については、参照先を図13のフローチャートに移して説明をする。
【0086】
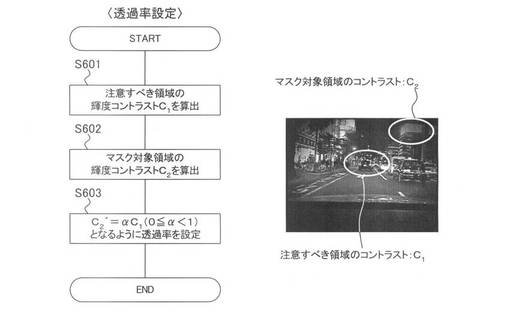
図13のフローチャートに示すように、まず、運転視界画像上における注意領域の輝度コントラストC1を算出する(S601)。つぎに、運転視界画像上におけるマスク対象領域(不要判定された高誘目性領域)の輝度コントラストC2を算出する(S602)。
【0087】
つぎに、S601,S602で算出した輝度コントラストC1,C2の値から、当該マスク対象領域に対してマスク画像によるフィルタリングをかけたと想定したときの輝度コントラストC2´が下記式(1)を満たすような透過率を計算する(S603)。
C2´=αC1(ただし、αは0≦α<1を満たす所定数)…式(1)
このようにすることで、マスク画像を表示したときの当該マスク対象領域の輝度コントラストを運転行動に必要な注意領域の輝度コントラストよりも低くすることができ、運転者が注意領域に対して注意を向けやすくできる。このように、マスク対象領域と注意領域との輝度コントラストの対比に基づいてマスク画像の透過率を決定することができる。
【0088】
この他にも、自車両の現在の速度に応じて透過率を変更してもよい。例えば、停止時や徐行時においては運転行動に不要な領域に注意を向けたとしても安全性は確保されるため、透過率を1に設定(マスキングの効果なし)する一方、通常の走行時は図13のフローチャートに示すとおり、運転視界画像の輝度コントラストに基づいて適応的に透過率を設定する。
【0089】
図11のフローチャートの説明に戻る。一方、S503で否定判定をした場合に進むS505では、表示するマスク画像の透過率を高め(≒1)に設定し、その後S506の処理へ進む。
【0090】
つぎに、S506では、S504又はS505で設定した透過率に応じて、マスク表示面における該当位置にマスク画像を表示して、運転者から見える運転視界の透過率を変更する。具体的には、図5を参照しながら既に説明したとおり、(a)局所領域の抽出、(b)ラベリング、(c)マスク領域及び透過率分布の設定といった手順を経てマスク画像を表示する。
【0091】
[情報提示フィルタリングによる効果の検証]
情報提示フィルタリングによる効果を、運転時における運転者の視線分布の測定結果から検証する。ここでは、運転行動に不要な高誘目領域が存在する場合には視線の分布が運転視界の広範囲に広がる一方、情報提示フィルタリングを施すことで、運転行動において注意を向けるべき位置に視線が集中することを実験結果から確認する。
【0092】
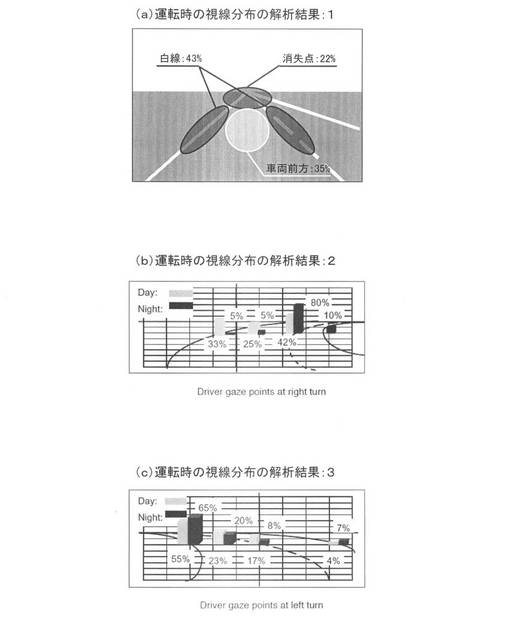
まず、視線を計測するアイマークレコーダーを用いた予備実験により、運転時に運転者が注意を向けるべき位置を確認した。その結果から、運転視界中に誘目性の高い領域がない場合の運転者の視線分布の解析結果を、図14(a)に示す。この図に示すように、運転視界中に誘目性の高い領域がない場合の視線分布は、消失点近傍に22%、路面上の白線に43%、自車両前方に35%程度集中することが確認された。
【0093】
図14(a)に示す実験結果以外にも、運転時の視線分布として、下記参考文献のような研究成果も報告されている。これによると、昼夜を問わず、右カーブではセンターラインに視線が集まりやすい傾向にあり(図14(b)参照)、左カーブでは路肩線に視線が集まりやすい傾向にある(図14(c)参照)。
〈参考文献〉石黒浩二,山田有二,“世界初インテリジェントAFSの制御仕様開発”,デンソーテクニカルレビュー,vol.9,no.2,pp.137-141,2004.
図14(a)〜(c)に示す解析結果から、誘目性の高い領域に注意が逸れずに運転に集中している場合、自車両の進行方向に視線が集まる傾向にあることが分かる。
【0094】
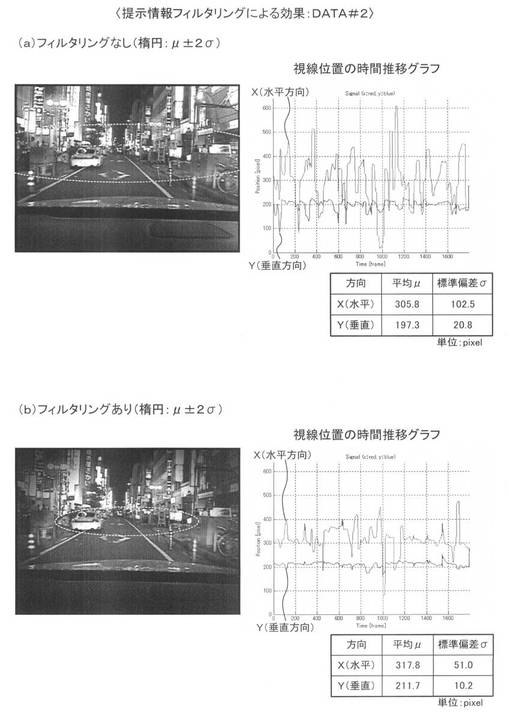
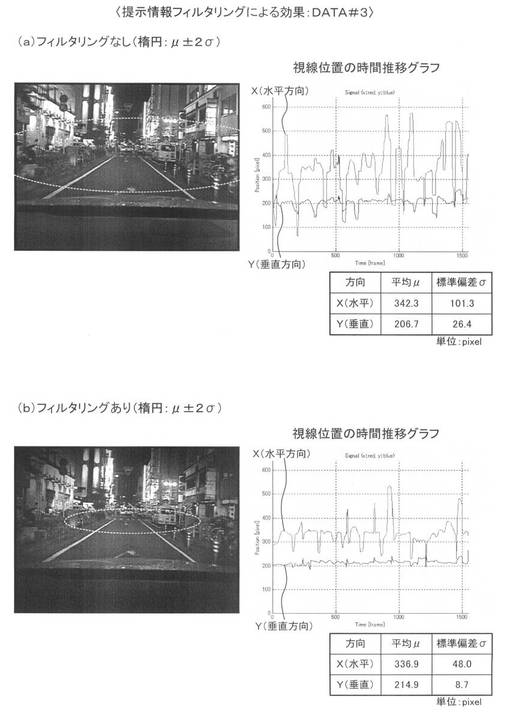
つぎに、同じ運転風景において情報提示フィルタリングのない状態とある状態とでそれぞれ被験者の視線位置の時間推移を計測した対比実験の結果について、図15〜17に示す3つの実験結果を参照しながら説明する。
【0095】
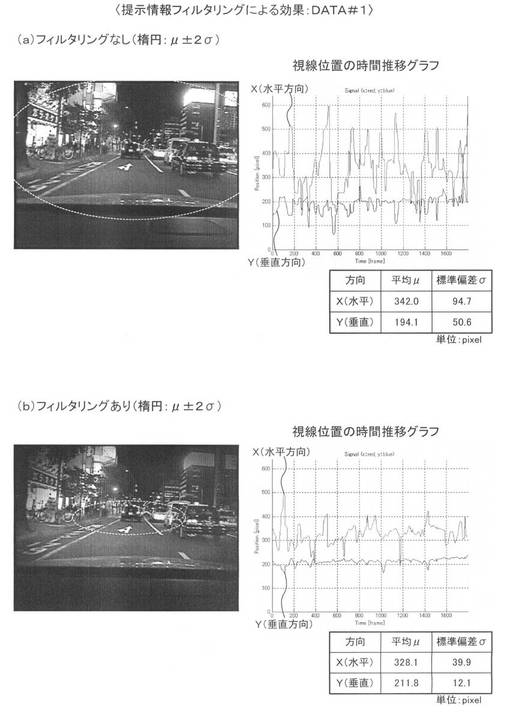
この実験では、夜間の繁華街において車載カメラで撮像した動画像を利用し、同じ動画像について、一方はカメラで撮像したままの画像(フィルタリングなし)で被験者の視線位置を計測し、他方はネオンサインや電光掲示板など、誘目性が高く、かつ運転行動に不要な領域に透過率を下げるマスク画像を重ねて表示した画像(フィルタリングあり)で被験者の視線位置を計測した結果を対比した。なお、実験は、DATA#1〜3の3種類の運転視界画像について実施した。
【0096】
図15は、DATA#1の実験結果を示す説明図である。このうち、(a)はフィルタリングなしでの実験結果であり、(b)はフィルタリングありでの実験結果であり、それぞれに運転視界画像例、運転視界画像上における視線位置の時間推移グラフ、時間推移グラフ統計結果(座標平均値μ、標準偏差σ)の表を記載している(図16,17についても同様)。なお、視線位置の時間推移グラフにおいて、横軸は時間を示しており、縦軸はXY座標値(単位:pixel)を示している。
【0097】
図15(a),(b)の計測結果を比較すると、双方とも視線位置の平均値μは車両の進行方向前方付近にあるものの、そのばらつきを示す標準偏差σの値については、フィルタリングなしの方が数倍程度大きくなっている。この結果から、フィルタリングなしの場合、被験者の視線位置は運転視界画像に補記した破線楕円で示すように広範囲にばらついており、フィルタリングありの場合、被験者の視線位置は運転視界画像に補記した破線楕円で示すように車両の進行方向前方、すなわち、運転行動において注意を向けるべき位置に集中していることが確認できる。
【0098】
図16は、DATA#2の実験結果を示す説明図である。このうち、(a)はフィルタリングなしでの実験結果であり、(b)はフィルタリングありでの実験結果である。この計測結果を比較すると、双方とも視線位置の平均値μは車両の進行方向前方付近にあるものの、そのばらつきを示す標準偏差σの値については、フィルタリングなしの方が2倍程度大きくなっている。この結果から、フィルタリングなしの場合、被験者の視線位置は運転視界画像に補記した破線楕円で示すように広範囲にばらついており、フィルタリングありの場合、被験者の視線位置は運転視界画像に補記した破線楕円で示すように車両の進行方向前方、すなわち、運転行動において注意を向けるべき位置に集中していることが確認できる。
【0099】
図17は、DATA#3の実験結果を示す説明図である。このうち、(a)はフィルタリングなしでの実験結果であり、(b)はフィルタリングありでの実験結果である。この計測結果を比較すると、双方とも視線位置の平均値μは車両の進行方向前方付近にあるものの、そのばらつきを示す標準偏差σの値については、フィルタリングなしの方が2倍以上大きくなっている。この結果から、フィルタリングなしの場合、被験者の視線位置は運転視界画像に補記した破線楕円で示すように広範囲にばらついており、フィルタリングありの場合、被験者の視線位置は運転視界画像に補記した破線楕円で示すように車両の進行方向前方、すなわち、運転行動において注意を向けるべき位置に集中していることが確認できる。
【0100】
以上、図15〜17に示す実験結果から、情報提示フィルタリングを行って運転者に対する情報の伝達を抑制することで、運転行動に不要な高誘目性領域に運転者が誘目されにくくなり、運転行動において注意を向けるべき位置に視線が集中することが確認された。
【0101】
[特許請求の範囲に記載の構成との対応]
実施形態の車両用情報伝達制御装置の構成と、特許請求の範囲に記載の構成との対応は次のとおりである。実施形態の車両用情報伝達制御装置における誘目性推定部20が、特許請求の範囲における誘目性領域特定手段に相当する。また、注意領域認識部30が、認識手段に相当する。また、要否判定部40が、要否判定手段に相当する。また、フィルタリング部60が、フィルタリング手段に相当する。
【0102】
[参考例]
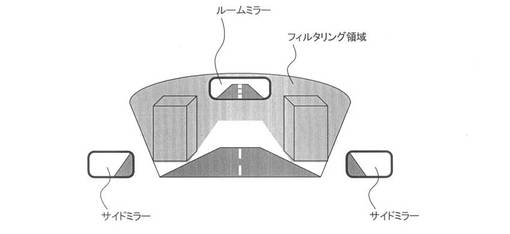
図18に示すように、運転視界内あるいは、その近傍に設けられるルームミラーやサイドミラー等のバックミラー(後写鏡)は、防眩機能が働いていない限り、本発明の情報伝達フィルタリングにより視認性を低下させた領域に比べ、相対的に輝度コントラストが高くなる可能性がある。人間は、輝度コントラストの高い領域に誘目されやすい傾向にあるため、情報伝達フィルタリングが行われることで、運転者がバックミラーを見る頻度が上がると推測される。
【0103】
一方、通常の鏡で構成されていた従来のバックミラーの代替として、将来、車両後方を撮像した映像を液晶ディスプレイ等の表示装置に映し出すバックモニターが広く普及する可能性がある。そこで、本発明の情報伝達フィルタリングの機能を、バックモニターのディスプレイ上に実装してもよい。また、フロントウィンドウ上で行う情報伝達フィルタリングと、バックモニターのディスプレイ上で行う情報伝達フィルタリングとを併用してもよい。
【符号の説明】
【0104】
10…画像取得部、20…誘目性推定部、30…注意領域認識部、40…要否判定部、50…透過率変更スイッチ、60…フィルタリング部。
【技術分野】
【0001】
本発明は、車両の乗員に対する情報伝達を制御するための技術に関する。
【背景技術】
【0002】
従来、車両の乗員に対して周辺状況に関する情報を提供する技術として、例えば、特許文献1に記載の車両用情報提供装置が知られている。この車両用情報提供装置では、運転者が注視すべき対象の視認性や誘目性に応じて、情報提示の方法や強度を変更する。
【0003】
具体的には、対象物の視認性や誘目性が低いと推定した場合には、対象物の位置や属性を示す情報提示を積極的に行い、対象物の視認性や誘目性が高いと推定した場合には、車両用情報提供装置が行う情報提示を一部抑制する。このようにすることで、運転者に対して情報を提供する際に、ドライバが煩わしく感じないようにできるとしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−30212号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記従来技術では、対象物の視認性や誘目性の度合に応じて情報提示の方法や強度を変更するものであり、情報提示による煩わしさを低減できるとはいえ、本質的には運転者に伝達される情報を増やすことで運転支援を行うものであることには変わりない。運転者に伝達される情報が増えれば、運転者の情報処理能力にかかる負荷も相応に増えることになる。昨今の運転支援システムでは、多くの情報を運転者に対して提示しており、運転者の情報処理能力にかかる負担が過大になることが懸念される。
【0006】
そこで、運転行動に不要な情報の伝達を抑制することで運転者の情報処理能力にかかる負担を軽減し、運転者の運転行動を支援する技術の開発が望まれる。
本発明は、上記課題を解決するためになされたものであり、運転行動に不要な情報に誘目され、運転行動を阻害されることを防止するための技術を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するためになされた請求項1に記載の車両用情報伝達制御装置は、車両の運転視界を撮像した画像情報から、運転者に対する誘目性が高く、かつ運転行動に不要と推定される高誘目性領域を特定し、その高誘目性領域に対応する運転視界の該当領域から運転者に伝達される視覚的情報に対して、運転者からの視認性を低下させるフィルタをかけることで当該視覚的情報の運転者への伝達を抑制することを特徴とする。
【0008】
また、請求項2に記載の車両用情報伝達制御装置は、誘目性領域特定手段と、要否判定手段と、フィルタリング手段とを備えることを特徴とする。誘目性領域特定手段は、車両の運転視界を撮像した画像情報から、運転者に対する誘目性が高いと推定される高誘目性領域を特定する。要否判定手段は、誘目性領域特定手段により特定された高誘目性領域に含まれる視覚的情報が運転行動に必要であるか否かを判定する。フィルタリング手段は、要否判定手段による判定の結果、運転行動に不要であると判断された高誘目性領域に対応する運転視界の該当領域から運転者に伝達される視覚的情報に対して、運転者からの視認性を低下させるフィルタをかける。
【0009】
本発明の車両用情報伝達制御装置によれば、外部から運転者にもたらされる様々な視覚的情報のうち、運転行動に不必要でかつ誘目性の高いと判断した視覚的情報の視認性を低下させることで、それらの視覚的情報の伝達を抑制できる。これにより、運転中に注意を向けるべきでない対象物に運転者が誘目されるのを防止でき、運転者を運転行動に集中させることができる。また、本発明は、従来のように運転者に対して能動的に情報を提供して運転支援を行うものとは異なり、外部からの不要な情報の伝達を抑制する、言い換えれば、不要な情報を間引くことで運転者の情報処理能力への負担を軽減できる。
【0010】
ところで、車両の運転視界を撮像した画像情報から誘目性の高い領域を特定する手法としては、画像情報における輝度、色、勾配、動きの少なくとも何れかの特徴量に基づく画像の顕著性を導出し、その顕著性に基づいて高誘目性領域を特定することが考えられる(請求項3)。
【0011】
人間の視覚は、光の色や強度、周囲との変化率(勾配)、時間的変化(動き)等といった様々な特徴量の時空間的変化が顕著な部分に注意を引かれる(誘目される)働きを持つことが知られている。そこで、運転視界を撮像した画像情報から、画像の輝度、色、勾配、動き等の特徴量に基づき、それらの時空間的変化の顕著性が高い部分を高誘目性領域と特定することで、運転者が誘目されやすい対象物を的確に特定できる。
【0012】
つぎに、請求項4に記載の発明は、運転視界の画像情報における運転者が注意すべき注意領域と、高誘目性領域との位置関係に応じて、当該高誘目性領域に含まれる視覚的情報が運転行動に必要であるか否かを判定することを特徴とする。
【0013】
車両を運転する場合、目に映るもの全に対してそれが何かを判断して注意を払っていては、急激な状況変化に対して判断が間に合わなくなるおそれがあるため、運転行動に必要な対象物に絞って注意を払うことが肝要となる。そのような観点から、運転視界を撮像した画像情報において運転者が注意すべき領域と、高誘目性領域との位置関係に応じて、当該高誘目性領域に含まれる視覚的情報が運転行動に必要であるか否かを判断するとよい。
【0014】
ここでいう運転者が注意すべき領域とは、例えば、車両の進行方向前方等の予め決められた範囲や、注意すべき対象物として検出した対象物が存在する範囲等が挙げられる。そして、画像情報から検出された高誘目性領域の位置が、それらの注意領域の位置に該当する場合、その高誘目性領域は運転行動に必要なものであると判断し、注意領域の位置に該当しない場合、その高誘目性領域が運転行動に不要なものであると判断すればよい。
【0015】
さらに、請求項5に記載の発明は、自車両の運転視界内に存在する交通参加者や特定の道路構造物を含む注意対象物を認識する認識手段を備え、要否判定手段は、認識手段によって認識された注意対象物が存在する画像情報における領域を注意領域として、その注意領域を除く範囲にある高誘目性領域を運転行動に不要であるものと判定することを特徴とする。
【0016】
このようにすることで、歩行者や他車両等の交通参加者や、運転者の注意を引くべき設けられた交通信号機、交通標識、道路標示、道路形状といった道路構造物等が検出された範囲といった運転行動において運転者が注意すべき対象物の視覚的情報はそのままに、それ以外の誘目されやすい視覚的情報の伝達を低減できる。これにより、運転行動において注意すべき交通参加者や道路構造物に対して運転者が注意を集中しやすくなる。
【0017】
ところで、運転行動に不要でかつ誘目性の高い視覚的情報の視認性を低減するフィルタリング手段としては、運転者から見える運転視界に重ねて設けられた表示領域を備える表示手段において、フィルタリングの対象となる前記視覚的情報の位置に対応する表示領域に透過率を低下させるマスク画像を表示する構成とすることが考えられる(請求項6)。
【0018】
このようなフィルタリング手段に用いられる表示手段としては、例えば、車両のフロントガラスに貼付け又は直近に設置して使用する透明のウィンドシールドディスプレイや、運転者の頭部に装着するヘッドマウントディスプレイ等が挙げられる。このような表示装置を用いる場合、フィルタリングすべき視覚的情報の位置を運転者からみた運転視界の位置に変換し、当該位置にマスクを提示することで、視覚的情報のフィルタリングが実現する。
【0019】
さらに、フィルタリング手段によるマスク画像の表示方法を工夫することが考えられる。具体的には、フィルタリング手段は、マスク画像を表示すべき表示範囲の中央部から、その表示範囲と非表示範囲との境界に向けて透過率を連続的に高くした前記マスク画像を表示する(請求項7)。このようにすることで、マスク画像の表示範囲とマスク画像を表示しない非表示範囲との境界において両者の透過率の差を小さくし、境界を目立たなくすることができる。そうすることで、マスク画像を表示した際に、表示範囲と非表示範囲との境界に運転者が誘目されるのを防ぐと共に、マスク画像を表示することにより運転者に与える違和感を低減できる。
【0020】
さらに、マスク画像の表示方法に関する工夫として、運転行動のために注意すべき所定領域の画像情報上におけるコントラストの高低度合と、フィルタリングの対象となる視覚的情報の画像情報上におけるコントラストの高低度合に応じて、マスク画像の透過率の高低度合を設定し、その設定した透過率でマスク画像を表示する構成であってもよい(請求項8)。
【0021】
例えば、マスク画像によりフィルタリングを施した視覚的情報が、運転行動のために注意すべき所定領域よりも相対的に目立たなくなるような透過率を設定すれば、運転行動に不要な領域の情報に誘目されることなく、運転行動のために注意すべき領域の情報を認識しやすくなると考えられる。
【0022】
そのためには、運転行動のために注意すべき所定領域のコントラストと、フィルタリングの対象となる視覚的情報のコントラストとの対比に基づき、マスク画像によりフィルタリングを施して透過率を下げた状態を想定した当該視覚的情報のコントラストが、運転行動のために注意すべき所定領域のコントラストよりも低くなるようにマスク画像の透過率を設定すればよい。
【0023】
あるいは、フィルタリング手段は、自車両の速度の高低度合に応じて、前記マスク画像の透過率の高低度合を設定し、その設定した透過率で前記マスク画像を表示するような構成であってもよい(請求項9)。
【0024】
例えば、車両が低速で走行している場合、運転者が視覚的情報を認識し、それを運転行動に反映させるのに時間的な余裕がある(運転者の負担が少ない)。そのため、様々な対象物に多少誘目されても、運転行動のための運転者の判断が間に合うため大きな問題はない。そこで、低速走行時には、例えば、フィルタリングに使用するマスク画像の透過率を比較的高めに設定することで、運転視界全体の見通しをよくすることが考えられる。また、停止時には、透過率を最大(フィルタリング効果なし)にしてもよい。
【0025】
一方、車両が高速で走行している場合、運転行動のための判断に費やせる時間が短くなる(運転者の負担が多い)。そのため、少しの脇見をしただけでも運転行動のために必要な判断が間に合わなくなるおそれがある。そこで、高速走行時には、例えば、フィルタリングに使用するマスク画像の透過率を比較的低目に設定することで、運転行動に必要な領域以外になるべく誘目されないようにすることが考えられる。
【0026】
このように、自車両の速度の高低度合に応じてマスク画像の透過率の高低度合を設定することで、車両の速度による運転負担の度合に応じた態様にて、運転者の情報処理能力の負担を軽減できる。
【0027】
つぎに、請求項10に記載の情報伝達制御方法は、車両の運転視界を撮像した画像情報から、運転者に対する誘目性が高いと推定される高誘目性領域を特定する誘目性領域特定手順と、誘目性領域特定手順において特定された高誘目性領域に含まれる視覚的情報が運転行動に必要であるか否かを判定する要否判定手順と、要否判定手順における判定の結果、運転行動に不要であると判断された高誘目性領域に対応する運転視界の該当領域から運転者に伝達される視覚的情報に対して、運転者からの視認性を低下させるフィルタをかけるフィルタリング手順とを有することを特徴とする。このような手順を有する情報伝達制御方法によれば、本発明の車両用情報伝達制御装置について上述した効果を得ることができる。
【図面の簡単な説明】
【0028】
【図1】実施形態の車両用情報伝達制御装置のシステム構成を示すブロック図である。
【図2】誘目性を推定するための顕著性マップの概要を示す説明図である。
【図3】高誘目性領域の要否判定の概要を示す説明図である。
【図4】情報提示フィルタリングの概要を示す説明図である。
【図5】マスク画像の表示方法の概要を示す説明図である。
【図6】メイン処理の手順を示すフローチャートである。
【図7】誘目性推定処理の手順を示すフローチャートである。
【図8】解像度ピラミッド(ガウシアン・ピラミッド)の概要を示す説明図である。
【図9】要否判定処理の手順を示すフローチャートである。
【図10】注意領域推定処理の手順を示すフローチャートである。
【図11】情報提示フィルタリング処理の手順を示すフローチャートである。
【図12】例外処理の手順を示すフローチャートである。
【図13】透過率設定処理の手順を示すフローチャートである。
【図14】運転時の視線分布の解析結果を示す説明図である。
【図15】情報提示フィルタリングによる効果の実証結果を示す説明図である。
【図16】情報提示フィルタリングによる効果の実証結果を示す説明図である。
【図17】情報提示フィルタリングによる効果の実証結果を示す説明図である。
【図18】情報提示フィルタリングとルームミラー、サイドミラーとの兼ね合いを示す説明図である。
【発明を実施するための形態】
【0029】
以下、本発明の一実施形態を図面に基づいて説明する。なお、本発明は下記の実施形態に何ら限定されるものではなく様々な態様にて実施することが可能である。
[車両用情報伝達制御装置のシステム構成の説明]
本発明が適用された車両用情報伝達制御装置のシステム構成について、図1に基づき説明する。本実施形態の車両用情報伝達制御装置は、車両に搭載される運転支援システムであり、図1に示すように、画像取得部10と、誘目性推定部20と、注意領域認識部30と、要否判定部40と、透過率変更スイッチ50と、フィルタリング部60とを備える。
【0030】
画像取得部10は、自車両前方を撮像する車載カメラ等の撮像手段により構成されている。この車載カメラは、CCDイメージセンサやCMOSイメージセンサ、及び被写体からの光をイメージセンサ上に集光するレンズ等を用いて構成された周知のものであり、運転者から見える自車両前方の運転視界全体が撮像範囲内に含まれるように、自車両前方に向けて配置されている。
【0031】
誘目性推定部20、注意領域認識部30、及び要否判定部40は、CPU,ROM,RAM,I/O等を備えた周知の情報処理装置(例えば、マイクロコンピュータ)として構成されている。
【0032】
このうち、誘目性推定部20は、画像取得部10から入力された撮像画像を画像処理によって解析し、運転者に対する誘目性が高いと推定される高誘目性領域を特定する機能を担う。誘目性の推定には、人間の注意を強く引く対象を見つけるための仕組みとして考案された「顕著性マップ」(Laurent Itti, Christof Koch, Ernst Niebur, "A model of saliency-based visual attention for rapid scene analysis," IEEE Trans. Pattern Analysis and Machine Intelligence, vol.20, no.11, pp.1254-1259, 1998.)の仕組みを利用する。
【0033】
ここで顕著性マップ(Saliency Map)の概要について、図2に基づいて説明する。図2に示すように、顕著性マップは、画像の色(Colors)、輝度(Intensity)、勾配(Orientations)、動き(Motion)といった人間が本能的に注意を引かれる各要素について、その特徴性を示す特徴マップ(Feature Map)をそれぞれ作成し、それらを重ね合わせて画像上の注意を引く箇所を特定できるようにしたものである。顕著性マップの生成に使われる特徴マップは、画像の解像度の縮小処理を段階的に繰り返して得られる画像群(ガウシアン・ピラミッド)から解像度の異なるペアを使って差異を求めるCenter-Surround Operationと呼ばれる手法によって作成される。
【0034】
図1の説明に戻る。注意領域認識部30は、画像取得部10から入力された撮像画像の中から、運転行動に必要な情報、すなわち、運転行動に際して運転者が注意すべき対象物や範囲が映っている注意領域を認識する。本実施形態では、注意領域として認識する対象物や範囲として、歩行者や自転車、二輪車、自動車といった交通参加者、及び、交通信号機や交通標識、道路標示、走行路の形状や白線といった道路構造物を想定している。また、これらの注意領域を認識するために、画像取得部10による撮像画像からの画像認識に加えて、図示しないミリ波レーダやレーザレーダ等を用いた物体認識や、ステアリングの舵角等の車両情報を用いた走行路認識(進行方向判定)等を用いてもよい。
【0035】
要否判定部40は、誘目性推定部20において推定された高誘目性領域と、注意領域認識部30において認識された注意領域との位置関係から、高誘目性領域が運転行動に必要な情報であるか否かを判定する。
【0036】
ここで、要否判定部40において実行される要否判定の概要について、図3を参照しながら説明する。要否判定は、まず、図3(1)〜(4)の手順のように、注意領域認識部30において運転視界の撮像画像上にある注意領域を認識した上で、図3(5)の手順で注意領域と高誘目性領域との位置関係から、高誘目性領域が運転行動に必要な情報であるか否かを判定する。
【0037】
図3(1)歩行者認識:安全運転のためには歩行者の存否や位置を把握しておく必要がある。よって、運転視界の撮像画像内に存在する歩行者を検出し、運転行動に必要な注意領域として認識する。
【0038】
図3(2)車両認識:安全運転のためには他車両(二輪車を含む)の存否や位置を把握しておく必要がある。よって、運転視界の撮像画像内に存在する車両を検出し、運転行動に必要な注意領域として認識する。
【0039】
図3(3)信号・標識認識:交通信号機や交通標識は、自車両の走行方法を選択する上で不可欠な情報である。よって、運転視界の撮像画像内に存在する交通信号機や交通標識を検出し、運転行動に必要な注意領域として認識する。
【0040】
図3(4)白線・走行路認識:走行路に設けられた白線や道路標示、あるいは走行路の形状は、自車両の速度や舵角を決定する上で不可欠な情報である。よって、運転視界の撮像画像内に白線や道路標示、走行路を検出した場合、それらを内包する領域を運転行動に必要な注意領域として認識する。
【0041】
図3(5)誘目性の高い領域の要否判定:上記(1)〜(4)で認識した注意領域は、運転行動における必要性が高い一方、それ以外の領域は運転行動における必要性は相対的に低い。そこで、誘目性推定部20による高誘目性領域の推定結果と、注意領域認識部30による認識結果とに基づき、高誘目性領域の要否判定を行う。その結果、注意領域以外の運転行動に不要な領域で、かつ高誘目性領域に該当する領域(図3(5)において点線で囲んだ領域)を抽出し、この領域を情報提示フィルタリングの対象とする。
【0042】
要否判定部40による要否判定の結果を受けて、フィルタリング部60は、情報提示フィルタリングの対象となる領域に対応する運転視界の該当領域に視認性を低下させるマスク画像を表示し、当該領域からの視覚的情報の運転者への伝達を抑制する(図3(6):フィルタリング)。
【0043】
図1の説明に戻る。透過率変更スイッチ50は、情報提示フィルタリングの強度をユーザが設定するための操作スイッチである。この透過率変更スイッチ50を操作することで、「透過率:高め」の設定を有効にすることができるようになっている。「透過率:高め」の設定が有効になっていると、情報提示フィルタリングの対象となる範囲に表示するマスク画像の透過率を通常よりも高くすることができ、これにより、必要に応じて情報提示フィルタリングの強度を意図的に低減できるようになっている。
【0044】
フィルタリング部60は、車両のフロントウィンドウ(ウインドシールド)に沿って設けられるウインドシールドディスプレイ(WSD)や、運転者の頭部に装着されるヘッドマウントディスプレイ(HMD)からなるマスク画像の表示部と、表示部の作動を制御する制御部からなる表示装置である。
【0045】
図4(a)は、マスク表示部の一例であり、フロントウィンドウに沿って設けられるWSDを用いた事例を示すものである。WSDは、運転者に視覚情報支援を行うための画像提示装置として、フロントウィンドウに広範囲に情報を映し出すことができる。これは、フロントウィンドウ越しにCG画像を現実の運転視界に重畳して表示可能なシースルー型の情報提示手段である。WSDでは、現実の景色をスクリーン越しに直接見るようになっており、現実の景色に仮想的な画像を重畳できるという利点がある。
【0046】
本実施形態のフィルタリング部60としては、一般用の情報提示と、情報提示フィルタリング用のマスク画像の表示とで1つのWSDを兼用するような構成であってもよいし、一般表示用のWSDと、マスク画像表示専用のWSDとをそれぞれ別個に備えるような構成であってもよい。
【0047】
図4(b)は、WSDやHMD等の表示部におけるマスク画像の表示例である。運転視界の撮像画像上で特定されたフィルタリングの対象領域の位置を、WSDやHMD等における表示範囲に変換し、その該当領域にマスク画像を表示する。マスク画像は、視覚的情報の伝達を完全に遮断するものではなく、例えば黒のメッシュ画像のように光の透過率を低下させて視覚的情報の伝達を一部抑制するものを用いる。また、高誘目性領域のコントラストやその他の外的な事情に応じて、マスク画像の透過性を変更する。
【0048】
つぎに、マスク画像の具体的な表示方法について、図5を参照しながら説明する。マスク画像の表示は、図5(a)に示す局所領域の抽出、図5(b)に示すラベリング、図5(c)に示すマスク領域の設定の各手順を経て行われる。各手順の内容は以下のとおりである。
【0049】
(a)局所領域の抽出:注意領域以外の運転行動に不要な領域で、かつ誘目性推定部20において生成された顕著性マップにおける顕著度が予め設定された閾値よりも大きい局所領域を抽出する。
【0050】
(b)ラベリング:上記(a)の手順で抽出した局所領域群にラベリング処理を施す。ここでは、連続する局所領域ごとに同一の識別番号を割り当て、同一の識別番号を有する局所領域群を1つの領域として見なす。また、ラベリング処理によって得られた各領域の重心位置や縦横のサイズを抽出する。
【0051】
(c)マスク領域の設定:上記(b)の手順で得られた各領域の重心位置及び縦横のサイズに合わせて、二次元ガウス分布に基づくマスク画像の透過率分布を設定する。二次元ガウス分布のモデルでは、中心(=領域の重心位置)に近い程確率が高く、中心から離れた周辺領域になる程確率が低くなる。すなわち、二次元ガウス分布のモデルにおいて確率が高い程、マスク画像の透過率を低く、確率が低い程、マスク画像の透過率を高く設定する。このように、マスク画像の中央部から周辺部に向けて透過率を連続的に高くして境界部分の透過率をその周辺とほぼ同じにすることで、マスク画像の境界に運転者が注意を引かれないようにできる。
【0052】
[メイン処理の説明]
つぎに、実施形態の車両用情報伝達制御装置の各部において実行されるメイン処理の手順について、図6のフローチャートを参照しながら説明する。この処理は、車両の走行中において所定時間ごとに繰返し実行される。
【0053】
まず、画像取得部10において自車両前方の運転視界画像を取得する(S101)。図6(a)は運転視界画像の一例である。また、歩行者や他車両といった交通参加者を検知するためのレーダ・センサ類からの検知情報も併せて取得する。
【0054】
つぎに、誘目性推定部20は、S101で取得された運転視界画像上において運転者の注意を強く引く高誘目性領域を推定する誘目性推定処理を実行する(S102)。誘目性の推定は、運転視界画像を画像処理して顕著性マップを作成することにより行う。図6(b)は運転視界画像から作成された顕著性マップの一例である。この顕著性マップでは、誘目性の高低度合が画像の濃淡として表されている。なお、誘目性推定処理の詳細な内容については後述する。
【0055】
つぎに、要否判定部40は、S102で推定された運転視界画像における高誘目性領域が運転行動に必要な情報であるか否かを判定する要否判定処理を実行する(S103)。要否の判定は、運転視界画像の顕著性マップから特定された運転視界画像上の高誘目性領域と、注意領域認識部30において認識された注意領域との位置関係に基づいて行う。図6(c)は要否判定結果の一例である。なお、要否判定処理の詳細な内容については後述する。
【0056】
そして、S104の判断ステップでは、S103の要否判定の結果から運転支援画像上において運転行動に不要で、かつ誘目性の高い領域が存在するか否かを判断する。運転行動に不要で、かつ誘目性の高い領域が存在する場合(S104:YES)、S105の処理へ進み、存在しない場合(S104:NO)、本処理を終了する。
【0057】
S104で肯定判定をした場合に進むS105では、要否判定処理(S103)の結果を受けて、フィルタリング部60が情報提示フィルタリング処理を実行し、その後、本処理を終了する。この情報提示フィルタリング処理では、運転視界画像から特定された情報提示フィルタリングの対象となる領域に対応するマスク表示部の該当領域に、運転視界の視認性を低下させるマスク画像を表示する。図6(d)は、運転行動に不要でかつ誘目性が高いと推定された運転視界の一部領域に重畳してマスク画像を表示した事例である。この事例では、運転視界の左上部及び右上部に光の透過率を低下させるマスク画像が表示されている。これにより、周辺の建物の照明やネオンサイン、電光掲示板といった運転行動に不要でかつ誘目性の高い視覚的情報の伝達が抑制されている。なお、情報提示フィルタリング処理の詳細な内容については後述する。
【0058】
[誘目性推定処理の説明]
上述のメイン処理のS102で実行される誘目性推定処理の手順について、図7のフローチャートを参照しながら説明する。
【0059】
誘目性推定部20は、まず、画像取得部10で取得した運転視界の撮像画像を処理して、解像度の異なる複数の画像からなる解像度ピラミッドを生成する(S201)。ここでは、図8に示すように、元画像に縮小処理を繰り返すことで、解像度を1/2、1/4、1/8…と小さくした画像群を生成する。このような画像を解像度順に重ねていくとピラミッドのような階層構造になるので、このような画像群は解像度ピラミッドと呼ばれる。
【0060】
つぎに、S201で生成した解像度ピラミッドの各階層の画像から、各画像の各点の輝度情報を抽出する(S202)。そして、その抽出した各画像の各点の輝度情報から、画像の輝度に関する特徴性を示す輝度特徴マップを生成する(S203)。ここでは、解像度ピラミッドにおいて解像度の異なる画像のペアを複数使って、画像の各点における輝度の差異を求め、その結果を元に輝度特徴マップを得ることができる。
【0061】
つぎに、S201で生成した解像度ピラミッドの各階層の画像から、各画像の各点の色(赤、緑、青、あるいは彩度、色相)情報を抽出する(S204)。そして、その抽出した各画像の各点の色情報から、画像の色に関する特徴性を示す色特徴マップを生成する(S205)。ここでは、解像度ピラミッドにおいて解像度の異なる画像のペアを複数使って、画像の各点における色の差異を求め、その結果を元に色特徴マップを得ることができる。
【0062】
つぎに、S201で生成した解像度ピラミッドの各階層の画像から、各画像の各点の勾配情報を抽出する(S206)。画像の勾配とは、各画素値の変化の度合を示すものである。そして、その抽出した各画像の各点の勾配情報から、画像の勾配に関する特徴性を示す勾配特徴マップを生成する(S207)。ここでは、解像度ピラミッドにおいて解像度の異なる画像のペアを複数使って、画像の各点における勾配の差異を求め、その結果を元に勾配特徴マップを得ることができる。
【0063】
つぎに、S201において時系列の複数の撮像画像から生成した時系列の複数の解像度ピラミッドにおける各階層の画像から、各画像の各点の時空間的変化(動き情報)を抽出する(S208)。そして、その抽出した各画像の各点の動き情報から、画像の動きに関する特徴性を示す動き特徴マップを生成する(S209)。ここでは、解像度ピラミッドの時系列に基づき、各階層画像の各点において方向及び速度の成分を計算し、その結果を元に動き特徴マップを得ることができる。
【0064】
つぎに、S203,S205,S207,S209の各ステップで生成した各特徴マップを重ね合わせて統合することで、運転視界画像に関する顕著性マップを作成する(S210)。この顕著性マップにより、運転視界画像について誘目されやすさの度合を推定した結果が得られる。そして、顕著性マップで所定の閾値より高い値を示す箇所に該当する画像領域を高誘目性領域として特定し(S211)、本処理を終了する。
【0065】
[要否判定処理の説明]
上述のメイン処理のS103で実行される要否判定処理の手順について、図9のフローチャートを参照しながら説明する。
【0066】
要否判定処理においては、まず、注意領域認識部30で注意領域推定処理が実行される(S301)。この注意領域推定処理については、参照先を図10のフローチャートに移して説明をする。
【0067】
図10のフローチャートに示すように、注意領域認識部30は、まず、現在の操舵角等、自車両の進行方向を推定するための車両情報を取得する(S401)。つぎに、S401で取得した車両情報に基づいて自車両の現在の進行方向を推定する(S402)。そして、画像取得部10により取得された運転視界画像において自車両の進行方向前方に該当する領域を注意領域に設定する(S403)。
【0068】
つぎに、運転視界画像から、交通信号機、交通標識、道路標示、白線及び走行路の形状等の道路構造物を画像認識により検出する(S404)。そして、S404で検出した道路構造物に該当する運転視界画像の領域を注意領域に設定する(S405)。
【0069】
つぎに、運転視界画像における画像認識や、レーダ・センサ類による検出情報から、車両、二輪車及び歩行者等の交通参加者を検出する(S406)。そして、S406で検出した交通参加者に該当する運転視界画像の領域を注意領域に設定し(S407)、本処理を終了する。
【0070】
図9のフローチャートの説明に戻る。S302では、上述の誘目性推定処理(図7参照)において推定された各高誘目性領域と、S301の注意領域推定処理において推定された各注意領域との位置関係を比較し、それぞれの高誘目性領域が注意領域に含まれているか否かを判定する。高誘目性領域が注意領域に含まれている場合(S302:YES)、その部分の高誘目性領域については運転行動に必要な情報であると特定する(S303)。一方、高誘目性領域が注意領域に含まれていない場合(S302:NO)、その部分の高誘目性領域については運転行動に不要な情報であると特定する(S304)。
【0071】
[情報提示フィルタリング処理の説明]
上述のメイン処理のS105で実行される情報提示フィルタリング処理の手順について、図11のフローチャートを参照しながら説明する。
【0072】
フィルタリング部60では、まず、要否判定部40による処理結果を受けて、不要判定された高誘目性領域の位置を、マスク表示部における位置に変換する(S501)。ここでは、運転視界画像上で特定された高誘目性領域の位置と、運転者から見た運転視界の位置とが同じになるように、マスク表示部における当該範囲を推定する。
【0073】
つぎに、表示するマスク画像の透過率に例外条件を適用するか否かを判断する例外処理を実行する(S502)。この例外処理については、参照先を図12のフローチャートに移して説明をする。
【0074】
図12のフローチャートに示すように、運転者に対して目的地までの経路案内を行う車載ナビゲーション装置(図示なし)から取得したナビゲーション情報に基づき、経路案内の目的地が設定されているか否かを判定する(S601)。目的地が設定されている場合(S601:YES)、S602の処理へ進み、目的地が設定されていない場合(S601:NO)、S603の処理へ進む。
【0075】
目的地が設定されている場合に進むS602では、ナビゲーション情報に基づいて、自車両が目的地付近に到着している状態であるか否かを判定する。目的地付近に到着している場合(S602:YES)、S607の処理へ進み、目的地付近に到着していない場合(S602:NO)、S603の処理へ進む。
【0076】
自車両が目的地付近に到着している場合に進むS607では、情報提示フィルタリングのために表示するマスク画像の透過率を高め(≒1)にする設定を有効にする。このように、車載ナビゲーション装置において目的地が設定されており、かつ、自車両が目的地付近に到着している場合、運転者が不慣れな道で目的地を探すために周辺の景色に意図的に注意を向けている状況にあると予想される。このような状況では、マスク画像の透過率をほぼ全透過に近い値に設定することで、運転者が見たい情報が抑制されてしまうのを防止できる。
【0077】
一方、S601又はS602で否定判定をした場合に進むS603では、運転時間の管理を行う別の運転支援機器(図示なし)から取得した運転支援情報に基づき、運転者が運転を開始してからの経過時間がN時間(Nは予め設定された時間)以上経過しているか否かを判定する。運転開始からの経過時間がN時間以上である場合(S603:YES)、S604の処理へ進み、運転開始からの経過時間がN時間未満である場合(S603:NO)、S605の処理へ進む。
【0078】
運転開始からの経過時間がN時間以上である場合に進むS604では、運転時間の管理を行う運転支援機器において休憩を促す案内が実施済みであるか否かを判定する。休憩を促す案内が実施済みである場合(S604:YES)、S607の処理へ進み、休憩を促す案内がまだ実施されていない場合(S604:NO)、S605の処理へ進む。
【0079】
休憩を促す案内が実施済みである場合に進むS607では、情報提示フィルタリングのために表示するマスク画像の透過率を高め(≒1)にする設定を有効にする。このように、運転開始から長時間が経過しており、かつ、休憩を促す案内が実施されている場合、運転者が休憩するための施設を探すために周辺の景色に意図的に注意を向けている状況にあると予想される。このような状況では、マスク画像の透過率をほぼ全透過に近い値に設定することで、運転者が見たい情報が抑制されてしまうのを防止できる。
【0080】
一方、S603又はS604で否定判定をした場合に進むS605では、燃料計から取得した情報に基づき、燃料の残量が僅少になっているか否かを判定する。燃料の残量が僅少になっている場合(S605:YES)、S607の処理へ進み、燃料の残量が僅少ではない場合(S605:NO)、S606の処理へ進む。
【0081】
燃料の残量が僅少になっている場合に進むS607では、情報提示フィルタリングのために表示するマスク画像の透過率を高め(≒1)にする設定を有効にする。このように、燃料が僅少になっている場合、運転者は燃料を補給できる給油施設や充電施設を探すために周辺の景色に意図的に注意を向けている状況にあると予想される。このような状況では、マスク画像の透過率をほぼ全透過に近い値に設定することで、運転者が見たい情報が抑制されてしまうのを防止できる。
【0082】
一方、S605で否定判定をした場合に進むS606では、透過率変更スイッチ50が操作されている、すなわち、「透過率:高め」の設定が有効にされているか否かを判定する。透過率変更スイッチ50の操作により「透過率:高め」の設定が有効にされている場合(S605:YES)、S607の処理へ進み、情報提示フィルタリングのために表示するマスク画像の透過率を高め(≒1)にする設定を有効にする。このように、ユーザが透過率変更スイッチ50を操作することにより、意図的にマスク画像の透過率をほぼ全透過に近い値に設定することができる。
【0083】
一方、透過率変更スイッチ50において「透過率:高め」の設定が無効にされている場合(S605:NO)、S608の処理へ進み、情報提示フィルタリングのために表示するマスク画像の透過率を適応的に変更する設定を有効にする(例外の適用なし)。
【0084】
図11のフローチャートの説明に戻る。次のS503では、先のS502の例外処理の結果において透過率を適応的に変更する設定が有効になっているか否かを判定する。透過率を適応的に変更する設定が有効になっている場合(S503:YES)、S504の処理へ進み、透過率を高めにする設定が有効になっていない場合(S503:NO)、S505の処理へ進む。
【0085】
透過率を適応的に変更する設定が有効になっている場合に進むS504では、マスク対象領域(不要判定された高誘目性領域)ごとにマスク画像の透過率を決定するための透過率設定処理を実行し、その後、S506の処理へ進む。この透過率設定処理については、参照先を図13のフローチャートに移して説明をする。
【0086】
図13のフローチャートに示すように、まず、運転視界画像上における注意領域の輝度コントラストC1を算出する(S601)。つぎに、運転視界画像上におけるマスク対象領域(不要判定された高誘目性領域)の輝度コントラストC2を算出する(S602)。
【0087】
つぎに、S601,S602で算出した輝度コントラストC1,C2の値から、当該マスク対象領域に対してマスク画像によるフィルタリングをかけたと想定したときの輝度コントラストC2´が下記式(1)を満たすような透過率を計算する(S603)。
C2´=αC1(ただし、αは0≦α<1を満たす所定数)…式(1)
このようにすることで、マスク画像を表示したときの当該マスク対象領域の輝度コントラストを運転行動に必要な注意領域の輝度コントラストよりも低くすることができ、運転者が注意領域に対して注意を向けやすくできる。このように、マスク対象領域と注意領域との輝度コントラストの対比に基づいてマスク画像の透過率を決定することができる。
【0088】
この他にも、自車両の現在の速度に応じて透過率を変更してもよい。例えば、停止時や徐行時においては運転行動に不要な領域に注意を向けたとしても安全性は確保されるため、透過率を1に設定(マスキングの効果なし)する一方、通常の走行時は図13のフローチャートに示すとおり、運転視界画像の輝度コントラストに基づいて適応的に透過率を設定する。
【0089】
図11のフローチャートの説明に戻る。一方、S503で否定判定をした場合に進むS505では、表示するマスク画像の透過率を高め(≒1)に設定し、その後S506の処理へ進む。
【0090】
つぎに、S506では、S504又はS505で設定した透過率に応じて、マスク表示面における該当位置にマスク画像を表示して、運転者から見える運転視界の透過率を変更する。具体的には、図5を参照しながら既に説明したとおり、(a)局所領域の抽出、(b)ラベリング、(c)マスク領域及び透過率分布の設定といった手順を経てマスク画像を表示する。
【0091】
[情報提示フィルタリングによる効果の検証]
情報提示フィルタリングによる効果を、運転時における運転者の視線分布の測定結果から検証する。ここでは、運転行動に不要な高誘目領域が存在する場合には視線の分布が運転視界の広範囲に広がる一方、情報提示フィルタリングを施すことで、運転行動において注意を向けるべき位置に視線が集中することを実験結果から確認する。
【0092】
まず、視線を計測するアイマークレコーダーを用いた予備実験により、運転時に運転者が注意を向けるべき位置を確認した。その結果から、運転視界中に誘目性の高い領域がない場合の運転者の視線分布の解析結果を、図14(a)に示す。この図に示すように、運転視界中に誘目性の高い領域がない場合の視線分布は、消失点近傍に22%、路面上の白線に43%、自車両前方に35%程度集中することが確認された。
【0093】
図14(a)に示す実験結果以外にも、運転時の視線分布として、下記参考文献のような研究成果も報告されている。これによると、昼夜を問わず、右カーブではセンターラインに視線が集まりやすい傾向にあり(図14(b)参照)、左カーブでは路肩線に視線が集まりやすい傾向にある(図14(c)参照)。
〈参考文献〉石黒浩二,山田有二,“世界初インテリジェントAFSの制御仕様開発”,デンソーテクニカルレビュー,vol.9,no.2,pp.137-141,2004.
図14(a)〜(c)に示す解析結果から、誘目性の高い領域に注意が逸れずに運転に集中している場合、自車両の進行方向に視線が集まる傾向にあることが分かる。
【0094】
つぎに、同じ運転風景において情報提示フィルタリングのない状態とある状態とでそれぞれ被験者の視線位置の時間推移を計測した対比実験の結果について、図15〜17に示す3つの実験結果を参照しながら説明する。
【0095】
この実験では、夜間の繁華街において車載カメラで撮像した動画像を利用し、同じ動画像について、一方はカメラで撮像したままの画像(フィルタリングなし)で被験者の視線位置を計測し、他方はネオンサインや電光掲示板など、誘目性が高く、かつ運転行動に不要な領域に透過率を下げるマスク画像を重ねて表示した画像(フィルタリングあり)で被験者の視線位置を計測した結果を対比した。なお、実験は、DATA#1〜3の3種類の運転視界画像について実施した。
【0096】
図15は、DATA#1の実験結果を示す説明図である。このうち、(a)はフィルタリングなしでの実験結果であり、(b)はフィルタリングありでの実験結果であり、それぞれに運転視界画像例、運転視界画像上における視線位置の時間推移グラフ、時間推移グラフ統計結果(座標平均値μ、標準偏差σ)の表を記載している(図16,17についても同様)。なお、視線位置の時間推移グラフにおいて、横軸は時間を示しており、縦軸はXY座標値(単位:pixel)を示している。
【0097】
図15(a),(b)の計測結果を比較すると、双方とも視線位置の平均値μは車両の進行方向前方付近にあるものの、そのばらつきを示す標準偏差σの値については、フィルタリングなしの方が数倍程度大きくなっている。この結果から、フィルタリングなしの場合、被験者の視線位置は運転視界画像に補記した破線楕円で示すように広範囲にばらついており、フィルタリングありの場合、被験者の視線位置は運転視界画像に補記した破線楕円で示すように車両の進行方向前方、すなわち、運転行動において注意を向けるべき位置に集中していることが確認できる。
【0098】
図16は、DATA#2の実験結果を示す説明図である。このうち、(a)はフィルタリングなしでの実験結果であり、(b)はフィルタリングありでの実験結果である。この計測結果を比較すると、双方とも視線位置の平均値μは車両の進行方向前方付近にあるものの、そのばらつきを示す標準偏差σの値については、フィルタリングなしの方が2倍程度大きくなっている。この結果から、フィルタリングなしの場合、被験者の視線位置は運転視界画像に補記した破線楕円で示すように広範囲にばらついており、フィルタリングありの場合、被験者の視線位置は運転視界画像に補記した破線楕円で示すように車両の進行方向前方、すなわち、運転行動において注意を向けるべき位置に集中していることが確認できる。
【0099】
図17は、DATA#3の実験結果を示す説明図である。このうち、(a)はフィルタリングなしでの実験結果であり、(b)はフィルタリングありでの実験結果である。この計測結果を比較すると、双方とも視線位置の平均値μは車両の進行方向前方付近にあるものの、そのばらつきを示す標準偏差σの値については、フィルタリングなしの方が2倍以上大きくなっている。この結果から、フィルタリングなしの場合、被験者の視線位置は運転視界画像に補記した破線楕円で示すように広範囲にばらついており、フィルタリングありの場合、被験者の視線位置は運転視界画像に補記した破線楕円で示すように車両の進行方向前方、すなわち、運転行動において注意を向けるべき位置に集中していることが確認できる。
【0100】
以上、図15〜17に示す実験結果から、情報提示フィルタリングを行って運転者に対する情報の伝達を抑制することで、運転行動に不要な高誘目性領域に運転者が誘目されにくくなり、運転行動において注意を向けるべき位置に視線が集中することが確認された。
【0101】
[特許請求の範囲に記載の構成との対応]
実施形態の車両用情報伝達制御装置の構成と、特許請求の範囲に記載の構成との対応は次のとおりである。実施形態の車両用情報伝達制御装置における誘目性推定部20が、特許請求の範囲における誘目性領域特定手段に相当する。また、注意領域認識部30が、認識手段に相当する。また、要否判定部40が、要否判定手段に相当する。また、フィルタリング部60が、フィルタリング手段に相当する。
【0102】
[参考例]
図18に示すように、運転視界内あるいは、その近傍に設けられるルームミラーやサイドミラー等のバックミラー(後写鏡)は、防眩機能が働いていない限り、本発明の情報伝達フィルタリングにより視認性を低下させた領域に比べ、相対的に輝度コントラストが高くなる可能性がある。人間は、輝度コントラストの高い領域に誘目されやすい傾向にあるため、情報伝達フィルタリングが行われることで、運転者がバックミラーを見る頻度が上がると推測される。
【0103】
一方、通常の鏡で構成されていた従来のバックミラーの代替として、将来、車両後方を撮像した映像を液晶ディスプレイ等の表示装置に映し出すバックモニターが広く普及する可能性がある。そこで、本発明の情報伝達フィルタリングの機能を、バックモニターのディスプレイ上に実装してもよい。また、フロントウィンドウ上で行う情報伝達フィルタリングと、バックモニターのディスプレイ上で行う情報伝達フィルタリングとを併用してもよい。
【符号の説明】
【0104】
10…画像取得部、20…誘目性推定部、30…注意領域認識部、40…要否判定部、50…透過率変更スイッチ、60…フィルタリング部。
【特許請求の範囲】
【請求項1】
車両の運転視界を撮像した画像情報から、運転者に対する誘目性が高く、かつ運転行動に不要と推定される高誘目性領域を特定し、その高誘目性領域に対応する前記運転視界の該当領域から運転者に伝達される視覚的情報に対して、運転者からの視認性を低下させるフィルタをかけることで当該視覚的情報の運転者への伝達を抑制することを特徴とする車両用情報伝達制御装置。
【請求項2】
車両の運転視界を撮像した画像情報から、運転者に対する誘目性が高いと推定される高誘目性領域を特定する誘目性領域特定手段と、
前記誘目性領域特定手段により特定された高誘目性領域に含まれる視覚的情報が運転行動に必要であるか否かを判定する要否判定手段と、
前記要否判定手段による判定の結果、運転行動に不要であると判断された前記高誘目性領域に対応する前記運転視界の該当領域から運転者に伝達される視覚的情報に対して、運転者からの視認性を低下させるフィルタをかけるフィルタリング手段とを備えること
を特徴とする車両用情報伝達制御装置。
【請求項3】
請求項2に記載の車両用情報伝達制御装置において、
前記誘目性領域特定手段は、車両の運転視界を撮像した画像情報における輝度、色、勾配、動きの少なくとも何れかの特徴量に基づく画像の顕著性を導出し、その顕著性に基づいて高誘目性領域を特定すること
を特徴とする車両用情報伝達制御装置。
【請求項4】
請求項2又は請求項3に記載の車両用情報伝達制御装置において、
前記要否判定手段は、前記運転視界の画像情報における運転者が注意すべき注意領域と、前記高誘目性領域との位置関係に応じて、当該高誘目性領域に含まれる視覚的情報が運転行動に必要であるか否かを判定すること
を特徴とする車両用情報伝達制御装置。
【請求項5】
請求項4に記載の車両用情報伝達制御装置において、
自車両の運転視界内に存在する交通参加者や特定の道路構造物を含む注意対象物を認識する認識手段を更に備え、
前記要否判定手段は、前記認識手段によって認識された注意対象物が存在する前記画像情報における領域を前記注意領域として、その注意領域を除く範囲にある前記高誘目性領域を運転行動に不要であるものと判定すること
を特徴とする車両用情報伝達制御装置。
【請求項6】
請求項2ないし請求項5の何れか1項に記載の車両用情報伝達制御装置において、
前記フィルタリング手段は、運転者から見える運転視界に重ねて設けられた表示領域を備える表示手段において、フィルタリングの対象となる前記視覚的情報の位置に対応する表示領域に透過率を低下させるマスク画像を表示すること
を特徴とする車両用情報伝達制御装置。
【請求項7】
請求項6に記載の車両用情報伝達制御装置において、
前記フィルタリング手段は、前記マスク画像を表示すべき表示範囲の中央部から、その表示範囲と非表示範囲との境界に向けて透過率を連続的に高くした前記マスク画像を表示すること
を特徴とする車両用情報伝達制御装置。
【請求項8】
請求項6又は請求項7に記載の車両用情報伝達制御装置において、
前記フィルタリング手段は、運転行動のために注意すべき所定領域の前記画像情報上におけるコントラストの高低度合と、フィルタリングの対象となる前記視覚的情報の前記画像情報上におけるコントラストの高低度合に応じて、前記マスク画像の透過率の高低度合を設定し、その設定した透過率で前記マスク画像を表示すること
を特徴とする車両用情報伝達制御装置。
【請求項9】
請求項6ないし請求項7の何れか1項に記載の車両用情報伝達制御装置において、
前記フィルタリング手段は、自車両の速度の高低度合に応じて、前記マスク画像の透過率の高低度合を設定し、その設定した透過率で前記マスク画像を表示すること
を特徴とする車両用情報伝達制御装置。
【請求項10】
車両の運転視界を撮像した画像情報から、運転者に対する誘目性が高いと推定される高誘目性領域を特定する誘目性領域特定手順と、
前記誘目性領域特定手順において特定された高誘目性領域に含まれる視覚的情報が運転行動に必要であるか否かを判定する要否判定手順と、
前記要否判定手順における判定の結果、運転行動に不要であると判断された前記高誘目性領域に対応する前記運転視界の該当領域から運転者に伝達される視覚的情報に対して、運転者からの視認性を低下させるフィルタをかけるフィルタリング手順とを有すること
を特徴とする情報伝達制御方法。
【請求項1】
車両の運転視界を撮像した画像情報から、運転者に対する誘目性が高く、かつ運転行動に不要と推定される高誘目性領域を特定し、その高誘目性領域に対応する前記運転視界の該当領域から運転者に伝達される視覚的情報に対して、運転者からの視認性を低下させるフィルタをかけることで当該視覚的情報の運転者への伝達を抑制することを特徴とする車両用情報伝達制御装置。
【請求項2】
車両の運転視界を撮像した画像情報から、運転者に対する誘目性が高いと推定される高誘目性領域を特定する誘目性領域特定手段と、
前記誘目性領域特定手段により特定された高誘目性領域に含まれる視覚的情報が運転行動に必要であるか否かを判定する要否判定手段と、
前記要否判定手段による判定の結果、運転行動に不要であると判断された前記高誘目性領域に対応する前記運転視界の該当領域から運転者に伝達される視覚的情報に対して、運転者からの視認性を低下させるフィルタをかけるフィルタリング手段とを備えること
を特徴とする車両用情報伝達制御装置。
【請求項3】
請求項2に記載の車両用情報伝達制御装置において、
前記誘目性領域特定手段は、車両の運転視界を撮像した画像情報における輝度、色、勾配、動きの少なくとも何れかの特徴量に基づく画像の顕著性を導出し、その顕著性に基づいて高誘目性領域を特定すること
を特徴とする車両用情報伝達制御装置。
【請求項4】
請求項2又は請求項3に記載の車両用情報伝達制御装置において、
前記要否判定手段は、前記運転視界の画像情報における運転者が注意すべき注意領域と、前記高誘目性領域との位置関係に応じて、当該高誘目性領域に含まれる視覚的情報が運転行動に必要であるか否かを判定すること
を特徴とする車両用情報伝達制御装置。
【請求項5】
請求項4に記載の車両用情報伝達制御装置において、
自車両の運転視界内に存在する交通参加者や特定の道路構造物を含む注意対象物を認識する認識手段を更に備え、
前記要否判定手段は、前記認識手段によって認識された注意対象物が存在する前記画像情報における領域を前記注意領域として、その注意領域を除く範囲にある前記高誘目性領域を運転行動に不要であるものと判定すること
を特徴とする車両用情報伝達制御装置。
【請求項6】
請求項2ないし請求項5の何れか1項に記載の車両用情報伝達制御装置において、
前記フィルタリング手段は、運転者から見える運転視界に重ねて設けられた表示領域を備える表示手段において、フィルタリングの対象となる前記視覚的情報の位置に対応する表示領域に透過率を低下させるマスク画像を表示すること
を特徴とする車両用情報伝達制御装置。
【請求項7】
請求項6に記載の車両用情報伝達制御装置において、
前記フィルタリング手段は、前記マスク画像を表示すべき表示範囲の中央部から、その表示範囲と非表示範囲との境界に向けて透過率を連続的に高くした前記マスク画像を表示すること
を特徴とする車両用情報伝達制御装置。
【請求項8】
請求項6又は請求項7に記載の車両用情報伝達制御装置において、
前記フィルタリング手段は、運転行動のために注意すべき所定領域の前記画像情報上におけるコントラストの高低度合と、フィルタリングの対象となる前記視覚的情報の前記画像情報上におけるコントラストの高低度合に応じて、前記マスク画像の透過率の高低度合を設定し、その設定した透過率で前記マスク画像を表示すること
を特徴とする車両用情報伝達制御装置。
【請求項9】
請求項6ないし請求項7の何れか1項に記載の車両用情報伝達制御装置において、
前記フィルタリング手段は、自車両の速度の高低度合に応じて、前記マスク画像の透過率の高低度合を設定し、その設定した透過率で前記マスク画像を表示すること
を特徴とする車両用情報伝達制御装置。
【請求項10】
車両の運転視界を撮像した画像情報から、運転者に対する誘目性が高いと推定される高誘目性領域を特定する誘目性領域特定手順と、
前記誘目性領域特定手順において特定された高誘目性領域に含まれる視覚的情報が運転行動に必要であるか否かを判定する要否判定手順と、
前記要否判定手順における判定の結果、運転行動に不要であると判断された前記高誘目性領域に対応する前記運転視界の該当領域から運転者に伝達される視覚的情報に対して、運転者からの視認性を低下させるフィルタをかけるフィルタリング手順とを有すること
を特徴とする情報伝達制御方法。
【図1】


【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図2】
【図3】
【図4】
【図5】
【図6】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【公開番号】特開2012−247847(P2012−247847A)
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願番号】特願2011−117100(P2011−117100)
【出願日】平成23年5月25日(2011.5.25)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年12月13日(2012.12.13)
【国際特許分類】
【出願日】平成23年5月25日(2011.5.25)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]