
車両用情報処理装置及び車両用情報処理方法
【課題】先行車両との車間距離を測定する手段を有して車両用情報の処理を行うに、先行車両との車間距離に対するドライバ自身の認識レベルをより明確に把握することを可能とする車両用情報処理装置及び車両用情報処理方法を提供する。
【解決手段】車両用情報処理装置は、先行車両との車間距離を測定する手段を有して車両用情報の処理を行う。車両用情報処理装置は、車両のアクセルペダルがオフ操作された時の先行車両との車間距離であるアクセルオフ車間距離と、このアクセルペダルのオフ操作に引き続き車両のブレーキペダルが踏み込み操作された時の先行車両との車間距離であるブレーキオン車間距離とをそれぞれ関連付けして記憶する手段を備える。
【解決手段】車両用情報処理装置は、先行車両との車間距離を測定する手段を有して車両用情報の処理を行う。車両用情報処理装置は、車両のアクセルペダルがオフ操作された時の先行車両との車間距離であるアクセルオフ車間距離と、このアクセルペダルのオフ操作に引き続き車両のブレーキペダルが踏み込み操作された時の先行車両との車間距離であるブレーキオン車間距離とをそれぞれ関連付けして記憶する手段を備える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用情報処理装置及び車両用情報処理方法に関し、特に先行車両との車間距離を測定する手段を有して車両用情報の処理を行う装置及び方法の改良に関する。
【背景技術】
【0002】
従来から、車両等の運転を支援する装置として、自車両と先行車両との間の車間距離を監視し、車間距離が短くなると、必要に応じて警報等を発する装置が知られている。こうした装置の一例として、特許文献1に記載の装置がある。
【0003】
特許文献1に記載の装置には、先行車両との車間距離を検出する距離検出手段と、車両と先行車両との接触を回避するために作動される回避手段と、ドライバの減速操作を検出する操作検出手段とが設けられている。また同装置には、ドライバの減速操作開始時の車間距離と減速操作量とに基づいて当該車間距離に対する回避手段の作動開始タイミングを決定して記憶するタイミング判定手段と、このタイミング判定手段により決定され、記憶された作動開始タイミングに基づいて回避手段を制御する制御手段とが設けられている。そして、車間距離が警報車間距離よりも短いときなどに、タイミング判定手段により決定された作動開始タイミングにて、スピーカから警報音を発生させたり、ディスプレイにその旨を表示させたりする。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−4745号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述のように、特許文献1に記載の装置では、タイミング判定手段による作動開始タイミングの決定と記憶とが、ドライバの減速操作開始時の車間距離と減速操作量とに基づいて行われる。ところが、こうした減速操作を含むドライバの車両操作は、ドライバの嗜好や道路環境の影響等により大きく変動することが少なくない。すなわち、こうした先行車両との車間距離にせよ、ドライバの減速操作後の状態のみを学習、記憶したところで、こうした車間距離に対するドライバ自身の認識レベルを把握することは難しい。そしてこのことは、運転支援を行う装置に限らず、先行車両との車間距離を測定する手段を有して車両用情報処理を行う装置にとっては、その課題も概ね共通したものとなっている。
【0006】
本発明は、このような実情に鑑みてなされたものであり、その目的は、先行車両との車間距離を測定する手段を有して車両用情報の処理を行うに、先行車両との車間距離に対するドライバ自身の認識レベルをより明確に把握することを可能とする車両用情報処理装置及び車両用情報処理方法を提供することにある。
【課題を解決するための手段】
【0007】
以下、上記課題を解決するための手段及びその作用効果について記載する。
上記課題を解決するため、請求項1に記載の発明は、先行車両との車間距離を測定する手段を有して車両用情報の処理を行う車両用情報処理装置であって、車両のアクセルペダルがオフ操作された時の先行車両との車間距離であるアクセルオフ車間距離と、このアクセルペダルのオフ操作に引き続き車両のブレーキペダルが踏み込み操作された時の先行車両との車間距離であるブレーキオン車間距離とをそれぞれ関連付けして記憶する手段を備えることを要旨とする。
【0008】
上記課題を解決するため、請求項8に記載の発明は、先行車両との車間距離を測定する手段を有して車両用情報の処理を行う車両用情報処理方法であって、車両のアクセルペダルがオフ操作された時の先行車両との車間距離であるアクセルオフ車間距離と、このアクセルペダルのオフ操作に引き続き車両のブレーキペダルが踏み込み操作された時の先行車両との車間距離であるブレーキオン車間距離とをそれぞれ関連付けして記憶する工程を備えることを要旨とする。
【0009】
このような構成もしくは方法によれば、アクセルペダルのオフ操作(アクセルオフ)からブレーキペダルの踏み込み操作(ブレーキオン)までの一連の流れで先行車両との車間距離が記憶(学習目的でもよい)されていくため、車両用情報を処理するうえでのドライバの車両操作特性、特にここでは、先行車両との車間距離に対するドライバ自身の認識レベルがより明確となり、例えば先行車両との車間距離を確保するための運転支援を行う場合などの情報解析精度、支援精度等の更なる向上が期待される。これによれば、例えば運転支援に対するドライバの違和感を少なくすることができるようにもなる。
【0010】
請求項2に記載の発明は、請求項1に記載の車両用情報処理装置において、前記アクセルオフ車間距離及び前記ブレーキオン車間距離が、その都度の車速に更に関連付けされて記憶されることを要旨とする。
【0011】
請求項9に記載の発明は、請求項8に記載の車両用情報処理方法において、前記アクセルオフ車間距離及び前記ブレーキオン車間距離を、その都度の車速に更に関連付けて記憶することを要旨とする。
【0012】
このような構成もしくは方法によれば、ドライバの車両操作特性として、都度の速度も記憶するため、記憶されたアクセルオフ車間距離及びブレーキオン車間距離に対する運転支援を車速に基づいて行なうことができるようになるため、例えば先行車両との車間距離を確保するための運転支援を行う場合などの情報解析精度、支援精度等の向上が更に期待される。
【0013】
請求項3に記載の発明は、請求項2に記載の車両用情報処理装置において、前記車速に関連付けされた前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶が、所定の車速範囲の領域毎に区別して行われることを要旨とする。
【0014】
請求項10に記載の発明は、請求項9に記載の車両用情報処理方法において、前記車速に関連付けされた前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶を、所定の車速範囲の領域毎に区別して行うことを要旨とする。
【0015】
このような構成もしくは方法によれば、車速範囲に対応するようにアクセルオフ車間距離及びブレーキオン車間距離が学習されるようになるため、運転支援の解析精度や支援制度等を維持しつつ、運転支援に要するデータ量を減らすことができるようになる。
【0016】
請求項4に記載の発明は、請求項1〜3のいずれか一項に記載の車両用情報処理装置において、前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶がドライバの別に行われることを要旨とする。
【0017】
請求項11に記載の発明は、請求項8〜10のいずれか一項に記載の車両用情報処理方法において、前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶をドライバの別に行うことを要旨とする。
【0018】
このような構成もしくは方法によれば、ドライバの車両操作特性、特にここでは、車間距離に対するドライバ自身の認識レベルをドライバ毎に明確となり、例えば先行車両との車間距離を確保するための運転支援を行う場合などの情報解析精度、支援精度等をドライバに対応する高い精度にできることが期待される。
【0019】
請求項5に記載の発明は、請求項1〜4のいずれか一項に記載の車両用情報処理装置において、前記記憶されたアクセルオフ車間距離及びブレーキオン車間距離の少なくとも一方を現在の車間距離と比較することに基づいて、運転支援情報を提供する手段を更に備えることを要旨とする。
【0020】
このような構成によれば、情報解析精度、支援精度等を向上させることのできるように記憶されたアクセルオフ車間距離とブレーキオン車間距離に基づいて運転支援情報を提供することができるため、精度の高い運転支援が提供できるようになるとともに、こうして提供する運転支援をドライバにとって違和感の少ないものにすることができる。
【0021】
請求項6に記載の発明は、請求項5に記載の車両用情報処理装置において、現在の車間距離が前記アクセルオフ車間距離以上であるか否か、及び、前記ブレーキオン車間距離以上であるか否かに基づいて提供する運転支援情報を変化させることを要旨とする。
【0022】
このような構成により、アクセルオフ車間距離及びブレーキオン車間距離に基づいて提供される運転支援情報の態様が比較結果にあわせて変化するため、この運転支援情報を用いることで、運転支援の内容を車間距離にあわせて変化させることができるようにもなる。例えば、車間距離に対応する運転支援をアクセルオフ車間距離の場合と、ブレーキオン車間距離の場合とで段階的に変化させるようにすることで、ドライバにとって違和感の少ない運転支援を提供することができるようにもなる。
【0023】
請求項7に記載の発明は、請求項5又は6に記載の車両用情報処理装置において、車両の速度を計測する手段から得られた現在の車両の速度に対応するアクセルオフ車間距離及びブレーキオン車間距離が前記記憶する手段に記憶されていないとき、現在の車両の速度よりも高い速度に対応するアクセルオフ車間距離及びブレーキオン車間距離を現在の車間距離と比較することに基づいて、運転支援情報を提供することを要旨とする。
【0024】
このような構成によれば、現在の車間距離との比較に、現在の車速よりも高い速度に対応するアクセルオフ車間距離及びブレーキオン車間距離を用いることで、現在の車速に対応するアクセルオフ車間距離やブレーキオン車間距離が得られない場合であっても、車間距離に対する運転支援を提供することができるようになる。
【0025】
また、現在の車速よりも高い速度に対応するアクセルオフ車間距離やブレーキオン車間距離を比較に用いることで、車間距離が広めに確保されるため、運転支援が不安定になるおそれがない。
【図面の簡単な説明】
【0026】
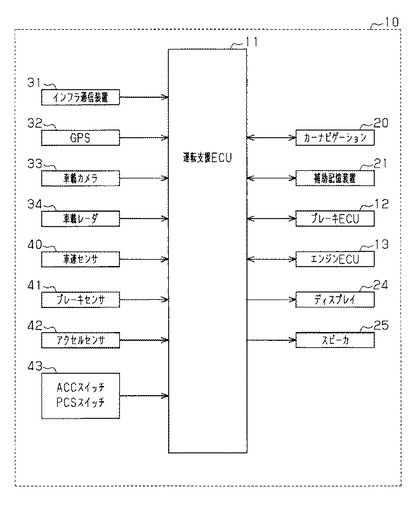
【図1】本発明にかかる車両用情報処理装置を備える運転支援装置を具体化した一実施形態について、そのシステム構成を示すブロック図。
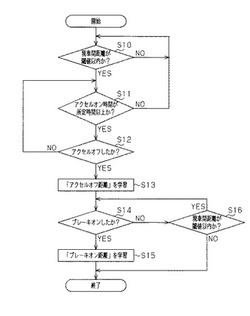
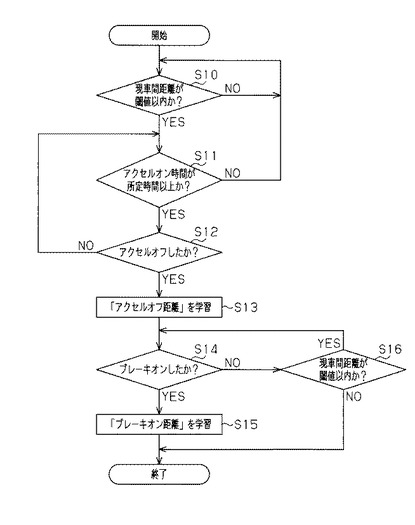
【図2】同実施形態の装置にて行われる車間距離の学習処理について、その学習手順を示すフローチャート。
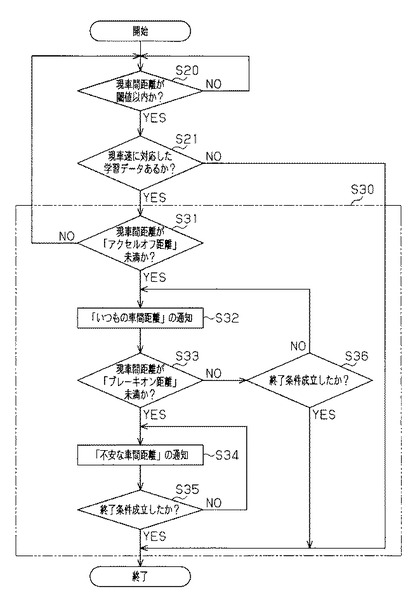
【図3】同実施形態の装置にて行われる車間距離を確保するための運転支援について、その運転支援手順を示すフローチャート。
【図4】同実施形態の装置におけるアクセルオフ距離及びブレーキオン距離等の関係を模式的に示す模式図。
【図5】同実施形態の装置にて運転支援として表示される画像を模式的に示す模式図であって、(a)は現在の車間距離が「いつもの車間距離」以上であるときの画像の模式図、(b)は現在の車間距離が「いつもの車間距離」の範囲にあるときの画像の模式図であり、(c)は現在の車間距離が「不安な車間距離」の範囲にあるときの画像の模式図。
【図6】本発明にかかる車両用情報処理装置を備える運転支援装置を具体化した他の実施形態について、その運転支援手順を示すタイミングチャート。
【図7】本発明にかかる車両用情報処理装置を備える運転支援装置を具体化したその他の実施形態について、その運転支援手順を示すタイミングチャート。
【発明を実施するための形態】
【0027】
以下、本発明にかかる車両用情報処理装置を備える運転支援装置を具体化した一実施形態について、図に従って説明する。
図1に示すように、車両10には、当該車両10を運転するドライバに対してその運転操作を支援するための各種制御等を行う車両用情報処理装置を構成する運転支援コントロールコンピュータ(運転支援ECU)11が設けられている。
【0028】
運転支援ECU11は、各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAM、入出力インターフェース、メモリ等を備えたマイクロコンピュータを中心に構成されている。運転支援ECU11には、運転支援を実行するための各種プログラムや、支援に用いられる各種パラメータなどが予め記憶されている。各種パラメータには、運転支援のタイミング等の演算に用いられる車両10の特性や性能を示す値なども含まれる。そして、演算装置による各種プログラムや各種パラメータの実行処理に基づいて、各種の運転支援が実行される。なお、本実施形態では、車間距離を学習するプログラムや、車間距離を確保するための運転支援を提供するプログラムや、それらプログラムに関するパラメータ等が記憶されている。このため、これらプログラムが演算装置で実行処理されることにより、運転支援ECU11は、車間距離を学習する(学習処理)ことができるようになるとともに、車間距離に対する運転支援を提供する(運転支援処理)ことができるようになる。
【0029】
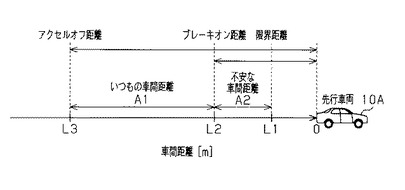
例えば、図4に示すように、運転支援ECU11では、自車両10と先行車両10Aとの車間距離について、学習処理によりアクセルオフ距離L3やブレーキオン距離L2が学習される。アクセルオフ距離L3は、自車両10が先行車両10Aに近づいたときにドライバが習慣的にアクセルオフの操作をする車間距離であり、ブレーキオン距離L2は、自車両10が先行車両10Aに近づき過ぎたときにドライバが習慣的にブレーキ操作(ブレーキオフ)をする車間距離である。つまり、それらの距離は、走行条件や環境が同一であっても、ドライバの個性によって多少変化する距離である。このとき、「いつもの車間距離」(範囲A1)は、アクセルオフ距離L3とブレーキオン距離L2とにより定められる範囲からなる。「不安な車間距離」(範囲A2)は、ブレーキオン距離L2と通常の減速操作で先行車両10Aへの接触を回避できる限界距離L1とにより定められる範囲からなる。
【0030】
運転支援ECU11には、車両10のブレーキの制御等を行うブレーキコントロールコンピュータ(ブレーキECU)12と、車両10のエンジンの制御等を行うエンジンコントロールコンピュータ(エンジンECU)13とが、CAN(Control Area Network)などの車載ネットワークを介してそれぞれ通信可能に接続されている。なお上記各ECU12,13は、上記運転支援ECU11と同様に、それぞれ各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAM、入出力インターフェース、メモリ等を備えたマイクロコンピュータを中心に構成されている。
【0031】
ブレーキECU12は、車両10のブレーキ装置の制御を行うECUであって、車速センサ40やブレーキセンサ41等の各種センサが接続されているとともに、各種センサからの信号に基づいて車両10のブレーキ装置の制御を通じて当該車両10に制動力を発生させる。具体的には、車速センサ40からの信号に基づいて把握される車両10の速度、ブレーキセンサ41のブレーキ踏込量の信号等に基づいて要求される制動力を算出してブレーキ装置を制御する。
【0032】
エンジンECU13は、車両10のエンジンの運転制御を行うECUであって、アクセル踏込量を検出するアクセルセンサ42や吸入空気量を検出するセンサ等が接続されるとともに、スロットルバルブの駆動回路、燃料噴射弁の駆動回路等の各種機器の駆動回路が接続されている。そして、エンジンECU13は、上記各センサから入力した検出信号に基づいて把握されるエンジンの運転状態等を検知するとともに、上記各種機器の駆動回路の指令信号を出力する。こうしてエンジンの運転制御がエンジンECU13を通じて実施される。
【0033】
また、運転支援ECU11には、カーナビゲーション20と、各種情報を読み書き可能に保持する車両用情報処理装置を構成する補助記憶装置21とがCANなどの車載ネットワークを介してそれぞれ通信可能に接続される。
【0034】
カーナビゲーション20は、全地球測位システム(GPS:Global Positioning System)等を利用して車両の現在位置を検出するとともに、予め記憶された道路地図情報を参照して、ドライバに走行目的地までの車両10の走行経路等の案内を行なう。カーナビゲーション20には、図示しない表示装置、入力装置、及び音声装置が設けられている。表示装置には、カーナビゲーション20から入力される画像データ等に対応した画像が表示される。これにより例えば、カーナビゲーション20は、車両10の現在位置とその周辺の地図とを組み合わせた画像データを出力して、車両10の位置とその周辺の地図とが組み合わされた画像を表示装置に表示させる。入力装置は、例えば、表示装置と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、各種の入力操作に使用される。音声装置は、音や音声を発生する装置であり、カーナビゲーション20から入力された音・音声データ等に対応した音や音声が出力される。音声装置には、音・音声データとして、カーナビゲーション20から、経路案内や交通情報などの音声情報が入力される。
【0035】
本実施形態のカーナビゲーション20は、補助記憶装置21に予め記憶された道路地図情報を取得して利用する。また、カーナビゲーション20は、車両10の位置に関する位置情報や、現在位置周辺の情報として抽出した道路地図情報などを運転支援ECU11に送信する。
【0036】
補助記憶装置21は、不揮発性の記憶装置であるHDD(Hard Disk Drive)を有し構成されており、ナビゲーション処理に使用する道路地図情報(地図データベース)など各種情報が格納されている。
【0037】
道路地図情報は、地図に関する情報であり、道路や道路地図の背景を表示するためのデータや、交差点の名称などから成るデータ等により構成されている。また、道路地図情報には、道路の形状、道路における交差点や横断歩道の情報などの道路付属情報が含まれている。具体的には、道路付属情報として、信号機が設けられた対象交差点の位置、道路の道路形状、トンネル、横断歩道、事故多発地点、路面状態などの情報が含まれる。運転支援ECU11は、これらの情報を学習処理の実行の可否や、運転支援処理の実行の可否の条件に用いることもできる。このことから、カーナビゲーション20から運転支援ECU11に送信される道路地図情報にも上述の道路付属情報等が含まれてもよい。
【0038】
また、補助記憶装置21には、運転支援ECU11が学習した情報、つまり学習データとしてのアクセルオフ距離L3やブレーキオン距離L2等が逐次記憶される。そして、運転支援ECU11は、車間距離を確保するため運転支援の際、それら記憶させたアクセルオフ距離L3やブレーキオン距離L2を補助記憶装置21から読み出して運転支援に利用する。
【0039】
さらに、運転支援ECU11には、運転支援に係る各種情報(警告情報)に応じた通知をドライバに対して出力する出力装置(マンマシンインターフェイス)として、ディスプレイ24及びスピーカ25が電気的に接続されていている。
【0040】
ディスプレイ24は、液晶ディスプレイなどを有し構成され、車室内のセンターコンソール付近に設置される。このディスプレイ24には、運転支援ECU11から入力される画像データ等に対応した画像が表示されたり、予め設定されている運転支援用の画像や表示が表示される。例えば、ディスプレイ24は、運転支援ECU11から入力された画像データを表示したり、運転支援ECU11から入力された指示に対応し、ドライバに対して注意を喚起するための運転支援の情報(警告情報など)を表示したりする。
【0041】
スピーカ25は、運転支援ECU11から入力される指示に対応して、運転支援のため、ドライバへの注意を喚起するための警報音等を発生する装置であり、運転支援ECU11からの信号に応じた警報音などを出力することができる。
【0042】
また、運転支援ECU11には、インフラ通信装置31、全地球測位システム(GPS)32、車間距離を測定する手段としての車載カメラ33、及び車間距離を測定する手段としての車載レーダ34などの各種情報取得装置がそれぞれ電気的に接続されている。
【0043】
インフラ通信装置31は、道路に設けられる光ビーコン装置(図示略)と赤外線信号などの光信号により通信を行う通信装置である。インフラ通信装置31は、光ビーコン装置から受信したインフラ情報信号を運転支援ECU11に送信する。例えば、インフラ通信装置31は、光ビーコン装置を介して、インフラ情報の一つとして、VICS(Vehicle Information and Communication System)センタから配信される道路交通情報を受信する。この道路交通情報には、例えば、渋滞区間、渋滞度等の渋滞情報、通行止め等の通行規制情報等が含まれる。また、インフラ情報には、光ビーコン装置が設けられている周囲の道路の道路状況(交差点形状、曲率、勾配、車線数を含む)などこの道路に付随した付随情報や、地上設備等により検出された周辺の他車両の移動体情報なども含まれる。運転支援ECU11は、これらの情報を学習処理の実行の可否や、運転支援処理の実行の可否の条件に用いることもできる。
【0044】
GPS32は、車両10の絶対位置を検出するためにGPS衛星信号を受信するとともに、受信されたGPS衛星信号に基づき車両10の位置を検出する。また、GPS32は検出された車両10の位置情報を運転支援ECU11に送信する。これにより、運転支援ECU11は、車両10の位置を把握することができる。
【0045】
車載カメラ33は、ルームミラーの裏側に設置された光学式のCCDカメラなどにより車両10前方の所定範囲を撮像するとともに、撮像された撮像画像に基づく画像信号を運転支援ECU11に送信する。運転支援ECU11は、この車載カメラ33により撮像された画像信号に基づいて、前方の先行車両10Aの距離などの各種状態を抽出する。そして抽出された前方の先行車両10Aとの間の距離、つまり自車両10(車両10)と先行車両10Aとの間の車間距離を算出することができる。
【0046】
車載レーダ34は、レーザ光を車両前方の所定範囲に照射することにより、そのレーザ光を反射する前方車両等の反射物体との距離、相対速度、方位等を検出する。これらの検出結果は、各反射物体毎に、運転支援ECU11に送信される。これにより、運転支援ECU11は、車両10前方にある他車両などの移動体や障害物などの有無や種類を判別したり、離間距離を把握したりすることができる。これにより、自車両10と先行車両10Aとの間の車間距離を算出することができる。
【0047】
さらに、運転支援ECU11には、車速センサ40、ブレーキセンサ41、アクセルセンサ42などの各種センサがそれぞれ電気的に接続されている。
車速センサ40は、車輪の回転速度を検出するとともに、当該検出された回転速度に応じた信号を運転支援ECU11に送信する。
【0048】
ブレーキセンサ41は、ドライバによるブレーキペダルの操作の有無やペダルの踏込量を検出するとともに、当該検出された操作の有無や踏込量に応じた信号を運転支援ECU11に送信する。これにより、運転支援ECU11は、ブレーキペダルが踏み込み操作されたこと、いわゆるブレーキ操作によるブレーキオンを検出できる。
【0049】
アクセルセンサ42は、ドライバによるアクセルペダルの操作の有無やペダルの踏込量を検出するとともに、当該検出された操作の有無やペダルの踏込量に応じた信号を運転支援ECU11に送信する。これにより、運転支援ECU11は、アクセルペダルが踏み込み操作されたこと、いわゆるアクセル操作によるアクセルオンや、アクセルペダルがオフ操作されたこと、いわゆるアクセル操作の終了によるアクセルオフを検出できる。
【0050】
上記各センサからの各種信号は、それぞれ所定の周期で運転支援ECU11に送信されることから、運転支援ECU11は、上記伝達される各種信号に基づいて、車両10の速度等の車両状況や車両操作状況を逐次把握することができるようになっている。
【0051】
また、運転支援ECU11には、車速/車間制御(ACC:Adaptive Cruise Control)スイッチや、衝突回避緩和制御(PCS:Pre−Crash Safety)スイッチなどの各種操作スイッチ43が電気的に接続されている。すなわち、運転支援ECU11で車速/車間制御や衝突回避緩和制御が実行されたとき、それら制御に、本実施形態の車間距離を確保するための運転支援情報を用いるようにしてもよい。
【0052】
(作用)
次に、本実施形態の車両用情報処理装置による車間距離の学習処理について、図2に従って説明する。なお、この車間距離の学習処理は、必要に応じて随時実行されるようになっている。
【0053】
図2に示すように、車間距離の学習処理が開始されると、運転支援ECU11は、自車両10と先行車両10Aとの間の現在の車間距離が、車間距離の学習条件として定めた所定の閾値(学習距離)以内の距離であるか否かを判断する(図2のステップS10)。現在の車間距離が学習距離以内ではない、つまり学習距離より長い距離であると判断された場合(図2のステップS10でNO)、運転支援ECU11は、所定の時間間隔でステップS10の処理を繰り返す。つまり、車間距離が学習距離以内になったことが検出されることを待つ。
【0054】
一方、現在の車間距離が学習距離以内の距離であると判断された場合(図2のステップS10でYES)、運転支援ECU11は、アクセルが操作(アクセルオン)されていた時間が、車間距離の学習条件として定めた所定の時間(必要時間)以上の時間であるか否かを判断する(図2のステップS11)。このように、アクセル操作が必要時間以上である場合に限定して学習をすることにより、渋滞中などアクセル操作が頻繁に生じるような場合を除外することなどができるようになり、学習精度を向上させることができるようになる。そして、アクセルが操作されていた時間が必要時間以上ではない、つまり必要時間未満であると判断された場合(図2のステップS11でNO)、運転支援ECU11は、ステップS10でNOのときと同様、所定の時間間隔でステップS10の処理を繰り返す。つまり、車間距離が学習距離以内になったことが検出されることを待つ。
【0055】
その一方、アクセルが操作されていた時間が必要時間以上であると判断された場合(図2のステップS11でYES)、運転支援ECU11は、アクセル操作が終了(アクセルオフ)されたか否かを判断する(図2のステップS12)。アクセル操作が終了されていないと判断された場合(図2のステップS12でNO)、運転支援ECU11は、所定の時間間隔でステップS11の処理を繰り返すことで、必要時間経過後にアクセル操作が終了することが検出されることを待つ。
【0056】
すなわち、アクセル操作が終了したと判断された場合(図2のステップS12でYES)、運転支援ECU11は、現在の車間距離をアクセルオフ距離L3として学習する(図2のステップS13)。なおこのとき、アクセルオフ距離L3に併せて、現在の速度V3及び現在の位置P3をそれぞれ学習する。この学習処理では、10km/h毎に定められた車速範囲から選択された現在の速度V3が含まれる車速範囲に対し、アクセルオフ距離L3が学習されるようになっている。なお、本実施形態の学習にかかるアルゴリズムとしては種々の学習アルゴリズムを採用することができる。
【0057】
アクセルオフ距離L3が学習されると、運転支援ECU11は、ブレーキ操作(ブレーキオン)されたか否かを判断する(図2のステップS14)。ブレーキ操作されていないと判断された場合(図2のステップS14でNO)、運転支援ECU11は、ここでも現在の車間距離が閾値以内、つまり学習距離以内の距離であるか否かを判断する(図2のステップS16)。現在の車間距離が学習距離以内の距離であると判断された場合(図2のステップS16でYES)、運転支援ECU11は、所定の時間間隔でステップS14の処理を繰り返す。一方、現在の車間距離が学習距離以内の距離ではない、つまり学習距離より長いと判断された場合(図2のステップS16でNO)、運転支援ECU11は、学習処理を終了する(図2のフローの終了)。なおこのとき、ブレーキオン距離L2についてはまだ学習されないため、アクセル操作の終了(アクセルオフ)とブレーキ操作(ブレーキオン)とを一連の操作として関連付けた車間距離の学習をすることができない。このため、ステップS13で学習されたアクセルオフ距離L3等についての学習結果が取り消される。
【0058】
一方、ブレーキが操作されたと判断された場合(図2のステップS14でYES)、運転支援ECU11は、現在の車間距離をブレーキオン距離L2として学習する(図2のステップS15)。なおこのとき、ブレーキオン距離L2に併せて、現在の速度V2及び現在の位置P2をそれぞれ学習する。この学習処理では、ステップS13での学習と同様に、10km/h毎に定められた車速範囲から選択された現在の速度V2が含まれる車速範囲に対し、ブレーキオン距離L2が学習されるようになっている。これにより、アクセル操作の終了(アクセルオフ)とブレーキ操作(ブレーキオン)とが一連の操作としての関連を有した態様でそれら操作に対応する車間距離等が学習される。そして、学習処理が終了される(図2のフローの終了)。
【0059】
続いて、本実施形態の車両用情報処理装置による車間距離に対する運転支援処理について、図3〜5に従って説明する。なお、この車間距離の運転支援処理は、必要に応じて随時実行されるようになっている。
【0060】
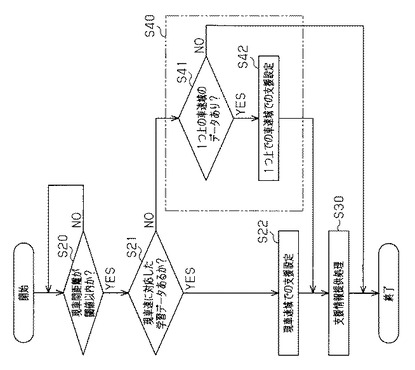
図3に示すように、車間距離を確保するための運転支援処理が開始されると、運転支援ECU11は、自車両10と先行車両10Aとの間の現在の車間距離が、車間距離の支援条件として定めた所定の閾値(支援距離)以内の距離であるか否かを判断する(図3のステップS20)。現在の車間距離が支援距離以内の距離ではない、つまり支援距離よりも長い距離であると判断された場合(図3のステップS20でNO)、運転支援ECU11は、所定の時間間隔でステップS20の処理を繰り返す。つまり、車間距離が支援距離になったことが検出されることを待つ。
【0061】
一方、現在の車間距離が支援距離以内の距離であると判断された場合(図3のステップS20でYES)、運転支援ECU11は、現在の車速に対応した学習データがあるか否かを判断する(図3のステップS21)。つまり運転支援ECU11は、現在の車速に対応した車速範囲を選択し、その車速範囲に関連付けられて学習されたアクセルオフ距離L3及びブレーキオン距離L2の有無を判断する。そして、現在の車速に対応した学習データがないと判断された場合(図3のステップS21でNO)、運転支援ECU11は、運転支援処理を終了する(図3のフローの終了)。
【0062】
一方、現在の車速に対応した学習データがあると判断された場合(図3のステップS21でYES)、運転支援ECU11は、ドライバに対して運転支援情報を提供する支援情報提供処理S30を行う。この運転支援情報は、ブレーキECU12やエンジンECU13に提供されてもよい。
【0063】
支援情報提供処理S30では、運転支援ECU11は、現在の車間距離がアクセルオフ距離L3未満であるか否かを判断する(図3のステップS31)。このとき、現在の車間距離がアクセルオフ距離L3未満ではないと判断された場合(図3のステップS31でNO)、運転支援ECU11は、所定の時間間隔をあけてステップS20の処理に戻る。つまり、車間距離が支援距離になったことが検出されることを待つ。
【0064】
現在の車間距離がアクセルオフ距離L3未満であると判断された場合(図3のステップS31でYES)、運転支援ECU11は、「いつもの車間距離」である旨の運転支援情報を通知(出力)する(図3のステップS32)。例えば、「いつもの車間距離」である旨の運転支援情報が通知されたディスプレイ24には、その旨を示す情報が表示され、スピーカ25からはその旨を示す音が出力される。
【0065】
続いて、運転支援ECU11は、現在の車間距離がブレーキオン距離L2未満であるか否かを判断する(図3のステップS33)。このとき、現在の車間距離がブレーキオン距離L2未満ではない、つまりブレーキオン距離L2以上と判断された場合(図3のステップS33でNO)、運転支援ECU11は、運転支援の終了条件が成立したか否かを判断する(図3のステップS36)。終了条件としては、ブレーキ操作(ブレーキオン)があることや、アクセル操作(アクセルオン)があることや、現在の車間距離が支援距離以上であることや、現在の車間距離が限界距離L1未満であることなどが挙げられ、これら条件のいずれか1つ以上の条件成立に基づいて、運転支援ECU11は、運転支援の終了条件が成立したと判断する。運転支援の終了条件が成立していないと判断されると(図3のステップS36でNO)、運転支援ECU11は、所定の時間間隔をあけてステップS32戻り、「いつもの車間距離」である旨の運転支援情報を通知(出力)することを繰り返す。
【0066】
その一方、運転支援の終了条件が成立していると判断されると(図3のステップS36でYES)、運転支援ECU11は、運転支援情報の提供を終了する(図3のフローの終了)。
【0067】
ここで、現在の車間距離がブレーキオン距離L2未満であると判断されると(図3のステップS33でYES)、運転支援ECU11は、「不安な車間距離」である旨の運転支援情報を通知(出力)する(図3のステップS34)。例えば、「不安な車間距離」である旨の運転支援情報が通知されたディスプレイ24には、その旨を示す情報が表示され、スピーカ25からはその旨を示す音が出力される。そして、運転支援ECU11は、運転支援の終了条件が成立したか否かを判断する(図3のステップS35)。終了条件は、上述のステップS36と同様である。
【0068】
運転支援の終了条件が成立していないと判断されると(図3のステップS35でYES)、運転支援ECU11は、所定の時間間隔をあけてステップS34に戻り、「不安な車間距離」である旨の運転支援情報を通知(出力)することを繰り返す。なお、ステップS35でNOのとき、ステップS33に戻すようにすることで、「不安な車間距離」が「いつもの車間距離」に変化した場合、ステップS32まで戻り、「いつもの車間距離」である旨の運転支援情報を通知できるようにしてもよい。
【0069】
一方、運転支援の終了条件が成立していると判断されると(図3のステップS35でNO)、運転支援ECU11は、運転支援情報の提供を終了する(図3のフローの終了)。
次に、図5を参照して、ドライバに対して提供される運転支援情報の態様について説明する。
【0070】
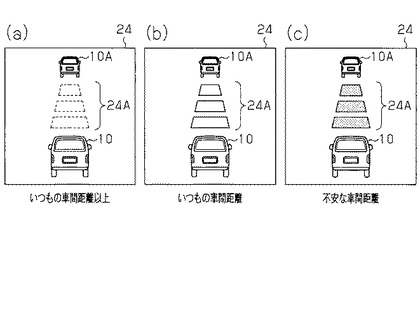
図5(a)〜(c)は、車間距離を確保するための運転支援として、ディスプレイ24に表示する画像を示している。ディスプレイ24には、自車両10と、先行車両10Aと、自車両10と先行車両10Aとの間に配置されたインジケータ24Aとが表示される。そして、インジケータ24Aの色などの表示態様が車間距離に応じて変化する。本実施形態では、車間距離が支援距離以上であるなど、車間距離を確保するための運転支援が不要である場合、図5(a)に示すように、ディスプレイ24には、インジケータ24Aが目立たない色として、例えばグレー(灰色)で表示される。また、「いつもの車間距離」である旨の運転支援情報が通知された場合、図5(b)に示すように、ディスプレイ24には、インジケータ24Aが現在の車間距離を肯定する色として、例えば青色で表示される。さらに、「不安な車間距離」である旨の運転支援情報が通知された場合、図5(c)に示すように、ディスプレイ24には、インジケータ24Aが現在の車間距離に注意を喚起する色として、例えば赤色で表示される。
【0071】
このように、ディスプレイ24に表示されたインジケータ24Aをドライバが参照することによって、ドライバの車両操作を、車間距離をインジケータ24Aが青色で示す範囲に維持させるように促すことができるようになる。これによって、先行車両10Aとの車間距離を確保するための運転支援を提供することができるようになる。
【0072】
以上説明したように、本実施形態の車両用情報処理装置によれば、以下に列記するような効果が得られるようになる。
(1)アクセルペダルのオフ操作(アクセルオフ)からブレーキペダルの踏み込み操作(ブレーキオン)までの一連の流れで先行車両10Aとの車間距離を学習目的で記憶していくようにした。このため、車両用情報を処理するうえでのドライバの車両操作特性、特にここでは、先行車両10Aとの車間距離に対するドライバ自身の認識レベルがより明確となり、例えば先行車両10Aとの車間距離を確保するための運転支援を行う場合などの情報解析精度、支援精度等の更なる向上が期待される。これによれば、例えば運転支援に対するドライバの違和感を少なくすることができるようにもなる。
【0073】
(2)ドライバの車両操作特性として、都度の速度も記憶するため、記憶されたアクセルオフ距離L3及びブレーキオン距離L2に対する運転支援を車速に基づいて行なうことができるようになる。このため、例えば先行車両10Aとの車間距離を確保するための運転支援を行う場合などの情報解析精度、支援精度等の向上が更に期待される。
【0074】
(3)車速範囲に対応するようにアクセルオフ距離L3及びブレーキオン距離L2を学習するようにした。このため、運転支援の解析精度や支援制度等を維持しつつ、運転支援に要するデータ量を減らすことができるようになる。
【0075】
(4)情報解析精度、支援精度等を向上させることのできるように学習されたアクセルオフ距離L3とブレーキオン距離L2に基づいて運転支援情報を提供することができるため、精度の高い運転支援が提供できるようになるとともに、こうして提供する運転支援をドライバにとって違和感の少ないものにすることができる。
【0076】
(5)アクセルオフ距離L3及びブレーキオン距離L2に基づいて提供される運転支援情報の態様が比較結果に応じて「いつもの車間距離」又は「不安な車間距離」に変化するため、この運転支援情報を用いることで、運転支援の内容を車間距離にあわせて変化させることができるようにもなる。例えば、例えばディスプレイ24に表示されるインジケータ24Aの色を、車間距離に応じて段階的に変化させるようにすることで、ドライバにとって違和感の少ない運転支援を提供することができるようにもなる。
【0077】
(その他の実施形態)
なお、上記実施形態は、例えば以下のような態様にて実施することもできる。
・上記実施形態では、現在の車速を含む車速範囲に対応する学習データがない場合(図3のステップS21でNO)、運転支援が行われない場合について例示した。しかしこれに限らず、現在の車速を含む車速範囲に対応する学習データがない場合、他の学習データを代用してもよい。例えば、図6に示すように、現在の車速に対応した学習データがあると判断された場合(図6のステップS21でYES)、現在の車速に対応する速度範囲の学習データに基づいて運転支援を行うことを設定し(図6のステップS22)、支援情報提供処理S30を行うようにすればよい。一方、現在の車速に対応した学習データがないと判断された場合(図6のステップS21でNO)、運転支援ECU11は、代替データ選択処理S40をしてもよい。代替データ選択処理S40では、一つ上の車速範囲に学習データがあるか否かを判断し(図6のステップS41)、該学習データがなかった場合(図6のステップS41でNO)、運転支援処理を終了するようにすればよい(図6のフローの終了)。一方、該学習データがあった場合(図6のステップS41でYES)、現在の車速に対応する速度範囲よりも一つ上の車速範囲の学習データに基づいて運転支援を行うことを設定し(図6のステップS42)、支援情報提供処理S30を行うようにすればよい。
【0078】
このように現在の車間距離との比較に、現在の車速よりも高い速度に対応するアクセルオフ車間距離及びブレーキオン車間距離を用いることで、現在の車速に対応するアクセルオフ車間距離やブレーキオン車間距離が得られない場合であっても、車間距離に対する運転支援を提供することができるようになる。
【0079】
また、現在の車速よりも高い速度に対応するアクセルオフ車間距離やブレーキオン車間距離を比較に用いることで、車間距離が広めに確保されるため、運転支援が不安定になるおそれがない。
【0080】
これにより、運転支援を提供できる可能性が高められ、この車両用情報処理装置の利便性が高められるようになる。
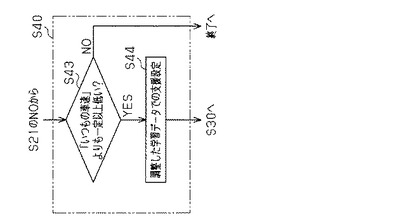
・また例えば、図7に示すように、代替データ選択処理S40では、当該地点における、現在の車速が「いつもの車速」よりも一定値(低速値)以上低いか否を判断し(図7のステップS43)、現在の車速が低速値以上低くなかった場合(図7のステップS43でNO)、運転支援処理を終了するようにしてもよい(図6のフローの終了へ)。なお、低速値は、予め設定されている速度の値でもよいし、普段の走行速度から所定の数値を引いて求められた速度の値など、普段の走行速度に基づいて算出される速度の値でもよい。
【0081】
一方、該現在の車速が低速値以上低かった場合(図7のステップS43でYES)、「いつもの車速」に対応するアクセルオフ距離を一定距離だけ長くするように調整した距離に基づいて、つまり調整した学習データに基づいて運転支援を行うことを設定し(図7のステップS44)、支援情報提供処理S30を行うようにすればよい。例えば、低速値を渋滞走行と判断できる値に設定し、アクセルオフ距離に代えて、アクセルオフ距離に当該低速値が加算調整された距離が運転支援に用いられるようにしている。これにより、アクセルオフ距離が長くなり、車間距離が広く確保されるように運転支援が行われる。例えば、渋滞時には車間距離を広げることで、燃費改善効果や渋滞緩和効果が高まることが期待されている。これにより、運転支援を提供できる可能性が高められ、この車両用情報処理装置の利便性が高められるようになる。
【0082】
・上記実施形態では、ディスプレイ24に運転支援に基づく警報等を表示する場合について例示したが、これに限らず、カーナビゲーションなどの表示装置に、ドライバに対して注意を喚起するために運転支援ECU11から入力された運転支援の情報(警告情報など)に応じた通知表示(警告表示)等の画像データを表示させてもよい。この場合、ディスプレイがなくても運転支援が提供できる。これにより、車両用情報処理装置としての構成の自由度などが向上するようになる。
【0083】
・上記実施形態では、スピーカ25から運転支援に基づく警報音等を発生させる場合について例示したが、これに限らず、カーナビゲーションなどの音声装置に、ドライバに対して注意を喚起するために運転支援ECU11から入力された運転支援の情報に応じた音声情報などを出力させてもよい。この場合、スピーカがなくても運転支援が提供できる。これにより、車両用情報処理装置としての構成の自由度などが向上するようになる。
【0084】
・上記実施形態では、車載レーダ34としてレーザ光を用いる場合について例示したが、しかしこれに限らず、車間距離を測定することができるのであれば、車載レーダは、音を用いるものや、電波を用いるものなどレーザ光以外のレーダであってもよい。これにより、車両用情報処理装置の構成の自由度が高められる。
【0085】
・上記実施形態では、車間距離を測定する手段が車載カメラ33、又は車載レーダ34である場合について例示したが、これに限らず、車間距離を測定することができれば、車間距離を測定する手段は、外部インフラ装置のカメラなど車載レーダ以外の手段であってもよい。これにより、車両用情報処理装置の構成の自由度が高められる。
【0086】
・上記実施形態では、運転支援処理において、車両10の現在の速度に基づいて学習データを探す場合について例示したが、これに限らず、車両の現在の速度とともに、車両の現在の位置に基づいて学習データを探すようにしてもよい。このように、位置情報を加えることで、支援精度の向上が期待される。
【0087】
・上記実施形態では、車両10におけるドライバの車両操作に基づいてアクセルオフ距離L3やブレーキオン距離L2が学習される場合について例示した。このとき、車両がドライバを認識したり車両にドライバを設定するようにして、ドライバ毎に車両操作を学習してもよい。このように、特定のドライバに特化する学習で、特定のドライバに対する情報解析の精度、支援制度の向上が期待でき、ドライバに適合した運転支援を提供することができる。これによって、車両用情報処理装置の利便性の向上が図られるようにもなる。
【0088】
・上記実施形態では、車速範囲の領域幅を10km/hに定めた場合を例示した。しかしこれに限らず、車速範囲の領域幅を10km/hより大きくしてもよいし、小さくしてもよい。また、各車速範囲の領域幅が異なっていてもよい。すなわち、10km/hの領域幅を有する車速範囲と、15km/hの領域幅を有する車速範囲とがあってもよい。これにより、車両用情報処理装置としての情報処理の自由度が向上するようになる。
【0089】
・上記実施形態では、アクセルオフ距離L3が学習された後にブレーキオン距離L2が学習されなかったとき、学習されたアクセルオフ距離L3の学習結果を取り消す場合について例示した。しかしこれに限らず、アクセルオフ距離やブレーキオン距離のみが学習されてもよい。例えばアクセルオフ距離のみを学習する場合、既に学習されているブレーキオン距離に対応付けるようにするとともに、対応付けできれば一連の操作として扱うこともできる。また、例えばブレーキオン距離のみを学習する場合、既に学習されているアクセルオフ距離に対応付けるようにするとともに、対応付けできれば一連の操作として扱うこともできる。これにより、車両用情報処理装置としての用途の拡大が測れるようになる。
【0090】
・上記実施形態では、現在の車間距離が学習距離以内の距離のときは、学習処理を開始する場合(図2のステップS10)について例示した。しかしこれに限らず、先行車両との車間距離が頻繁に変化する交差点付近やカーブ時などの箇所では学習処理を開始しないようにしてもよい。これにより、学習されるアクセルオフ距離やブレーキオン距離が好適に学習されるようになるため、車両用情報処理装置としても情報解析精度や支援精度を向上させることができるようになる。
【0091】
・上記実施形態では、現在の車間距離が支援距離以内の距離のときは、運転支援処理を開始する場合(図3のステップS20)について例示した。しかしこれに限らず、先行車両との車間距離が頻繁に変化する交差点付近やカーブ時などの箇所では運転支援処理を実施しないようにしてもよい。これにより、車間距離に対する運転支援の効果があまり得られず、運転支援がかえってドライバに煩わしさを感じさせるおそれのあるようなことを防ぐことができるようになる。これにより、車両用情報処理装置による車間距離に対する支援精度の向上が図られるようになる。
【符号の説明】
【0092】
10…車両、10A…先行車両、11…運転支援ECU(運転支援コントロールコンピュータ)、12…ブレーキECU(ブレーキコントロールコンピュータ)、13…エンジンECU(エンジンコントロールコンピュータ)、20…カーナビゲーション、21…補助記憶装置、24…ディスプレイ、24A…インジケータ、25…スピーカ、31…インフラ通信装置、32…GPS、32…全地球測位システム、33…車載カメラ、34…車載レーダ、40…車速センサ、41…ブレーキセンサ、42…アクセルセンサ、43…操作スイッチ。
【技術分野】
【0001】
本発明は、車両用情報処理装置及び車両用情報処理方法に関し、特に先行車両との車間距離を測定する手段を有して車両用情報の処理を行う装置及び方法の改良に関する。
【背景技術】
【0002】
従来から、車両等の運転を支援する装置として、自車両と先行車両との間の車間距離を監視し、車間距離が短くなると、必要に応じて警報等を発する装置が知られている。こうした装置の一例として、特許文献1に記載の装置がある。
【0003】
特許文献1に記載の装置には、先行車両との車間距離を検出する距離検出手段と、車両と先行車両との接触を回避するために作動される回避手段と、ドライバの減速操作を検出する操作検出手段とが設けられている。また同装置には、ドライバの減速操作開始時の車間距離と減速操作量とに基づいて当該車間距離に対する回避手段の作動開始タイミングを決定して記憶するタイミング判定手段と、このタイミング判定手段により決定され、記憶された作動開始タイミングに基づいて回避手段を制御する制御手段とが設けられている。そして、車間距離が警報車間距離よりも短いときなどに、タイミング判定手段により決定された作動開始タイミングにて、スピーカから警報音を発生させたり、ディスプレイにその旨を表示させたりする。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2001−4745号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上述のように、特許文献1に記載の装置では、タイミング判定手段による作動開始タイミングの決定と記憶とが、ドライバの減速操作開始時の車間距離と減速操作量とに基づいて行われる。ところが、こうした減速操作を含むドライバの車両操作は、ドライバの嗜好や道路環境の影響等により大きく変動することが少なくない。すなわち、こうした先行車両との車間距離にせよ、ドライバの減速操作後の状態のみを学習、記憶したところで、こうした車間距離に対するドライバ自身の認識レベルを把握することは難しい。そしてこのことは、運転支援を行う装置に限らず、先行車両との車間距離を測定する手段を有して車両用情報処理を行う装置にとっては、その課題も概ね共通したものとなっている。
【0006】
本発明は、このような実情に鑑みてなされたものであり、その目的は、先行車両との車間距離を測定する手段を有して車両用情報の処理を行うに、先行車両との車間距離に対するドライバ自身の認識レベルをより明確に把握することを可能とする車両用情報処理装置及び車両用情報処理方法を提供することにある。
【課題を解決するための手段】
【0007】
以下、上記課題を解決するための手段及びその作用効果について記載する。
上記課題を解決するため、請求項1に記載の発明は、先行車両との車間距離を測定する手段を有して車両用情報の処理を行う車両用情報処理装置であって、車両のアクセルペダルがオフ操作された時の先行車両との車間距離であるアクセルオフ車間距離と、このアクセルペダルのオフ操作に引き続き車両のブレーキペダルが踏み込み操作された時の先行車両との車間距離であるブレーキオン車間距離とをそれぞれ関連付けして記憶する手段を備えることを要旨とする。
【0008】
上記課題を解決するため、請求項8に記載の発明は、先行車両との車間距離を測定する手段を有して車両用情報の処理を行う車両用情報処理方法であって、車両のアクセルペダルがオフ操作された時の先行車両との車間距離であるアクセルオフ車間距離と、このアクセルペダルのオフ操作に引き続き車両のブレーキペダルが踏み込み操作された時の先行車両との車間距離であるブレーキオン車間距離とをそれぞれ関連付けして記憶する工程を備えることを要旨とする。
【0009】
このような構成もしくは方法によれば、アクセルペダルのオフ操作(アクセルオフ)からブレーキペダルの踏み込み操作(ブレーキオン)までの一連の流れで先行車両との車間距離が記憶(学習目的でもよい)されていくため、車両用情報を処理するうえでのドライバの車両操作特性、特にここでは、先行車両との車間距離に対するドライバ自身の認識レベルがより明確となり、例えば先行車両との車間距離を確保するための運転支援を行う場合などの情報解析精度、支援精度等の更なる向上が期待される。これによれば、例えば運転支援に対するドライバの違和感を少なくすることができるようにもなる。
【0010】
請求項2に記載の発明は、請求項1に記載の車両用情報処理装置において、前記アクセルオフ車間距離及び前記ブレーキオン車間距離が、その都度の車速に更に関連付けされて記憶されることを要旨とする。
【0011】
請求項9に記載の発明は、請求項8に記載の車両用情報処理方法において、前記アクセルオフ車間距離及び前記ブレーキオン車間距離を、その都度の車速に更に関連付けて記憶することを要旨とする。
【0012】
このような構成もしくは方法によれば、ドライバの車両操作特性として、都度の速度も記憶するため、記憶されたアクセルオフ車間距離及びブレーキオン車間距離に対する運転支援を車速に基づいて行なうことができるようになるため、例えば先行車両との車間距離を確保するための運転支援を行う場合などの情報解析精度、支援精度等の向上が更に期待される。
【0013】
請求項3に記載の発明は、請求項2に記載の車両用情報処理装置において、前記車速に関連付けされた前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶が、所定の車速範囲の領域毎に区別して行われることを要旨とする。
【0014】
請求項10に記載の発明は、請求項9に記載の車両用情報処理方法において、前記車速に関連付けされた前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶を、所定の車速範囲の領域毎に区別して行うことを要旨とする。
【0015】
このような構成もしくは方法によれば、車速範囲に対応するようにアクセルオフ車間距離及びブレーキオン車間距離が学習されるようになるため、運転支援の解析精度や支援制度等を維持しつつ、運転支援に要するデータ量を減らすことができるようになる。
【0016】
請求項4に記載の発明は、請求項1〜3のいずれか一項に記載の車両用情報処理装置において、前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶がドライバの別に行われることを要旨とする。
【0017】
請求項11に記載の発明は、請求項8〜10のいずれか一項に記載の車両用情報処理方法において、前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶をドライバの別に行うことを要旨とする。
【0018】
このような構成もしくは方法によれば、ドライバの車両操作特性、特にここでは、車間距離に対するドライバ自身の認識レベルをドライバ毎に明確となり、例えば先行車両との車間距離を確保するための運転支援を行う場合などの情報解析精度、支援精度等をドライバに対応する高い精度にできることが期待される。
【0019】
請求項5に記載の発明は、請求項1〜4のいずれか一項に記載の車両用情報処理装置において、前記記憶されたアクセルオフ車間距離及びブレーキオン車間距離の少なくとも一方を現在の車間距離と比較することに基づいて、運転支援情報を提供する手段を更に備えることを要旨とする。
【0020】
このような構成によれば、情報解析精度、支援精度等を向上させることのできるように記憶されたアクセルオフ車間距離とブレーキオン車間距離に基づいて運転支援情報を提供することができるため、精度の高い運転支援が提供できるようになるとともに、こうして提供する運転支援をドライバにとって違和感の少ないものにすることができる。
【0021】
請求項6に記載の発明は、請求項5に記載の車両用情報処理装置において、現在の車間距離が前記アクセルオフ車間距離以上であるか否か、及び、前記ブレーキオン車間距離以上であるか否かに基づいて提供する運転支援情報を変化させることを要旨とする。
【0022】
このような構成により、アクセルオフ車間距離及びブレーキオン車間距離に基づいて提供される運転支援情報の態様が比較結果にあわせて変化するため、この運転支援情報を用いることで、運転支援の内容を車間距離にあわせて変化させることができるようにもなる。例えば、車間距離に対応する運転支援をアクセルオフ車間距離の場合と、ブレーキオン車間距離の場合とで段階的に変化させるようにすることで、ドライバにとって違和感の少ない運転支援を提供することができるようにもなる。
【0023】
請求項7に記載の発明は、請求項5又は6に記載の車両用情報処理装置において、車両の速度を計測する手段から得られた現在の車両の速度に対応するアクセルオフ車間距離及びブレーキオン車間距離が前記記憶する手段に記憶されていないとき、現在の車両の速度よりも高い速度に対応するアクセルオフ車間距離及びブレーキオン車間距離を現在の車間距離と比較することに基づいて、運転支援情報を提供することを要旨とする。
【0024】
このような構成によれば、現在の車間距離との比較に、現在の車速よりも高い速度に対応するアクセルオフ車間距離及びブレーキオン車間距離を用いることで、現在の車速に対応するアクセルオフ車間距離やブレーキオン車間距離が得られない場合であっても、車間距離に対する運転支援を提供することができるようになる。
【0025】
また、現在の車速よりも高い速度に対応するアクセルオフ車間距離やブレーキオン車間距離を比較に用いることで、車間距離が広めに確保されるため、運転支援が不安定になるおそれがない。
【図面の簡単な説明】
【0026】
【図1】本発明にかかる車両用情報処理装置を備える運転支援装置を具体化した一実施形態について、そのシステム構成を示すブロック図。
【図2】同実施形態の装置にて行われる車間距離の学習処理について、その学習手順を示すフローチャート。
【図3】同実施形態の装置にて行われる車間距離を確保するための運転支援について、その運転支援手順を示すフローチャート。
【図4】同実施形態の装置におけるアクセルオフ距離及びブレーキオン距離等の関係を模式的に示す模式図。
【図5】同実施形態の装置にて運転支援として表示される画像を模式的に示す模式図であって、(a)は現在の車間距離が「いつもの車間距離」以上であるときの画像の模式図、(b)は現在の車間距離が「いつもの車間距離」の範囲にあるときの画像の模式図であり、(c)は現在の車間距離が「不安な車間距離」の範囲にあるときの画像の模式図。
【図6】本発明にかかる車両用情報処理装置を備える運転支援装置を具体化した他の実施形態について、その運転支援手順を示すタイミングチャート。
【図7】本発明にかかる車両用情報処理装置を備える運転支援装置を具体化したその他の実施形態について、その運転支援手順を示すタイミングチャート。
【発明を実施するための形態】
【0027】
以下、本発明にかかる車両用情報処理装置を備える運転支援装置を具体化した一実施形態について、図に従って説明する。
図1に示すように、車両10には、当該車両10を運転するドライバに対してその運転操作を支援するための各種制御等を行う車両用情報処理装置を構成する運転支援コントロールコンピュータ(運転支援ECU)11が設けられている。
【0028】
運転支援ECU11は、各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAM、入出力インターフェース、メモリ等を備えたマイクロコンピュータを中心に構成されている。運転支援ECU11には、運転支援を実行するための各種プログラムや、支援に用いられる各種パラメータなどが予め記憶されている。各種パラメータには、運転支援のタイミング等の演算に用いられる車両10の特性や性能を示す値なども含まれる。そして、演算装置による各種プログラムや各種パラメータの実行処理に基づいて、各種の運転支援が実行される。なお、本実施形態では、車間距離を学習するプログラムや、車間距離を確保するための運転支援を提供するプログラムや、それらプログラムに関するパラメータ等が記憶されている。このため、これらプログラムが演算装置で実行処理されることにより、運転支援ECU11は、車間距離を学習する(学習処理)ことができるようになるとともに、車間距離に対する運転支援を提供する(運転支援処理)ことができるようになる。
【0029】
例えば、図4に示すように、運転支援ECU11では、自車両10と先行車両10Aとの車間距離について、学習処理によりアクセルオフ距離L3やブレーキオン距離L2が学習される。アクセルオフ距離L3は、自車両10が先行車両10Aに近づいたときにドライバが習慣的にアクセルオフの操作をする車間距離であり、ブレーキオン距離L2は、自車両10が先行車両10Aに近づき過ぎたときにドライバが習慣的にブレーキ操作(ブレーキオフ)をする車間距離である。つまり、それらの距離は、走行条件や環境が同一であっても、ドライバの個性によって多少変化する距離である。このとき、「いつもの車間距離」(範囲A1)は、アクセルオフ距離L3とブレーキオン距離L2とにより定められる範囲からなる。「不安な車間距離」(範囲A2)は、ブレーキオン距離L2と通常の減速操作で先行車両10Aへの接触を回避できる限界距離L1とにより定められる範囲からなる。
【0030】
運転支援ECU11には、車両10のブレーキの制御等を行うブレーキコントロールコンピュータ(ブレーキECU)12と、車両10のエンジンの制御等を行うエンジンコントロールコンピュータ(エンジンECU)13とが、CAN(Control Area Network)などの車載ネットワークを介してそれぞれ通信可能に接続されている。なお上記各ECU12,13は、上記運転支援ECU11と同様に、それぞれ各種演算処理を実行するCPU、各種制御プログラムを格納するROM、データ格納やプログラム実行のためのワークエリアとして利用されるRAM、入出力インターフェース、メモリ等を備えたマイクロコンピュータを中心に構成されている。
【0031】
ブレーキECU12は、車両10のブレーキ装置の制御を行うECUであって、車速センサ40やブレーキセンサ41等の各種センサが接続されているとともに、各種センサからの信号に基づいて車両10のブレーキ装置の制御を通じて当該車両10に制動力を発生させる。具体的には、車速センサ40からの信号に基づいて把握される車両10の速度、ブレーキセンサ41のブレーキ踏込量の信号等に基づいて要求される制動力を算出してブレーキ装置を制御する。
【0032】
エンジンECU13は、車両10のエンジンの運転制御を行うECUであって、アクセル踏込量を検出するアクセルセンサ42や吸入空気量を検出するセンサ等が接続されるとともに、スロットルバルブの駆動回路、燃料噴射弁の駆動回路等の各種機器の駆動回路が接続されている。そして、エンジンECU13は、上記各センサから入力した検出信号に基づいて把握されるエンジンの運転状態等を検知するとともに、上記各種機器の駆動回路の指令信号を出力する。こうしてエンジンの運転制御がエンジンECU13を通じて実施される。
【0033】
また、運転支援ECU11には、カーナビゲーション20と、各種情報を読み書き可能に保持する車両用情報処理装置を構成する補助記憶装置21とがCANなどの車載ネットワークを介してそれぞれ通信可能に接続される。
【0034】
カーナビゲーション20は、全地球測位システム(GPS:Global Positioning System)等を利用して車両の現在位置を検出するとともに、予め記憶された道路地図情報を参照して、ドライバに走行目的地までの車両10の走行経路等の案内を行なう。カーナビゲーション20には、図示しない表示装置、入力装置、及び音声装置が設けられている。表示装置には、カーナビゲーション20から入力される画像データ等に対応した画像が表示される。これにより例えば、カーナビゲーション20は、車両10の現在位置とその周辺の地図とを組み合わせた画像データを出力して、車両10の位置とその周辺の地図とが組み合わされた画像を表示装置に表示させる。入力装置は、例えば、表示装置と一体になったタッチスイッチもしくはメカニカルなスイッチ等が用いられ、各種の入力操作に使用される。音声装置は、音や音声を発生する装置であり、カーナビゲーション20から入力された音・音声データ等に対応した音や音声が出力される。音声装置には、音・音声データとして、カーナビゲーション20から、経路案内や交通情報などの音声情報が入力される。
【0035】
本実施形態のカーナビゲーション20は、補助記憶装置21に予め記憶された道路地図情報を取得して利用する。また、カーナビゲーション20は、車両10の位置に関する位置情報や、現在位置周辺の情報として抽出した道路地図情報などを運転支援ECU11に送信する。
【0036】
補助記憶装置21は、不揮発性の記憶装置であるHDD(Hard Disk Drive)を有し構成されており、ナビゲーション処理に使用する道路地図情報(地図データベース)など各種情報が格納されている。
【0037】
道路地図情報は、地図に関する情報であり、道路や道路地図の背景を表示するためのデータや、交差点の名称などから成るデータ等により構成されている。また、道路地図情報には、道路の形状、道路における交差点や横断歩道の情報などの道路付属情報が含まれている。具体的には、道路付属情報として、信号機が設けられた対象交差点の位置、道路の道路形状、トンネル、横断歩道、事故多発地点、路面状態などの情報が含まれる。運転支援ECU11は、これらの情報を学習処理の実行の可否や、運転支援処理の実行の可否の条件に用いることもできる。このことから、カーナビゲーション20から運転支援ECU11に送信される道路地図情報にも上述の道路付属情報等が含まれてもよい。
【0038】
また、補助記憶装置21には、運転支援ECU11が学習した情報、つまり学習データとしてのアクセルオフ距離L3やブレーキオン距離L2等が逐次記憶される。そして、運転支援ECU11は、車間距離を確保するため運転支援の際、それら記憶させたアクセルオフ距離L3やブレーキオン距離L2を補助記憶装置21から読み出して運転支援に利用する。
【0039】
さらに、運転支援ECU11には、運転支援に係る各種情報(警告情報)に応じた通知をドライバに対して出力する出力装置(マンマシンインターフェイス)として、ディスプレイ24及びスピーカ25が電気的に接続されていている。
【0040】
ディスプレイ24は、液晶ディスプレイなどを有し構成され、車室内のセンターコンソール付近に設置される。このディスプレイ24には、運転支援ECU11から入力される画像データ等に対応した画像が表示されたり、予め設定されている運転支援用の画像や表示が表示される。例えば、ディスプレイ24は、運転支援ECU11から入力された画像データを表示したり、運転支援ECU11から入力された指示に対応し、ドライバに対して注意を喚起するための運転支援の情報(警告情報など)を表示したりする。
【0041】
スピーカ25は、運転支援ECU11から入力される指示に対応して、運転支援のため、ドライバへの注意を喚起するための警報音等を発生する装置であり、運転支援ECU11からの信号に応じた警報音などを出力することができる。
【0042】
また、運転支援ECU11には、インフラ通信装置31、全地球測位システム(GPS)32、車間距離を測定する手段としての車載カメラ33、及び車間距離を測定する手段としての車載レーダ34などの各種情報取得装置がそれぞれ電気的に接続されている。
【0043】
インフラ通信装置31は、道路に設けられる光ビーコン装置(図示略)と赤外線信号などの光信号により通信を行う通信装置である。インフラ通信装置31は、光ビーコン装置から受信したインフラ情報信号を運転支援ECU11に送信する。例えば、インフラ通信装置31は、光ビーコン装置を介して、インフラ情報の一つとして、VICS(Vehicle Information and Communication System)センタから配信される道路交通情報を受信する。この道路交通情報には、例えば、渋滞区間、渋滞度等の渋滞情報、通行止め等の通行規制情報等が含まれる。また、インフラ情報には、光ビーコン装置が設けられている周囲の道路の道路状況(交差点形状、曲率、勾配、車線数を含む)などこの道路に付随した付随情報や、地上設備等により検出された周辺の他車両の移動体情報なども含まれる。運転支援ECU11は、これらの情報を学習処理の実行の可否や、運転支援処理の実行の可否の条件に用いることもできる。
【0044】
GPS32は、車両10の絶対位置を検出するためにGPS衛星信号を受信するとともに、受信されたGPS衛星信号に基づき車両10の位置を検出する。また、GPS32は検出された車両10の位置情報を運転支援ECU11に送信する。これにより、運転支援ECU11は、車両10の位置を把握することができる。
【0045】
車載カメラ33は、ルームミラーの裏側に設置された光学式のCCDカメラなどにより車両10前方の所定範囲を撮像するとともに、撮像された撮像画像に基づく画像信号を運転支援ECU11に送信する。運転支援ECU11は、この車載カメラ33により撮像された画像信号に基づいて、前方の先行車両10Aの距離などの各種状態を抽出する。そして抽出された前方の先行車両10Aとの間の距離、つまり自車両10(車両10)と先行車両10Aとの間の車間距離を算出することができる。
【0046】
車載レーダ34は、レーザ光を車両前方の所定範囲に照射することにより、そのレーザ光を反射する前方車両等の反射物体との距離、相対速度、方位等を検出する。これらの検出結果は、各反射物体毎に、運転支援ECU11に送信される。これにより、運転支援ECU11は、車両10前方にある他車両などの移動体や障害物などの有無や種類を判別したり、離間距離を把握したりすることができる。これにより、自車両10と先行車両10Aとの間の車間距離を算出することができる。
【0047】
さらに、運転支援ECU11には、車速センサ40、ブレーキセンサ41、アクセルセンサ42などの各種センサがそれぞれ電気的に接続されている。
車速センサ40は、車輪の回転速度を検出するとともに、当該検出された回転速度に応じた信号を運転支援ECU11に送信する。
【0048】
ブレーキセンサ41は、ドライバによるブレーキペダルの操作の有無やペダルの踏込量を検出するとともに、当該検出された操作の有無や踏込量に応じた信号を運転支援ECU11に送信する。これにより、運転支援ECU11は、ブレーキペダルが踏み込み操作されたこと、いわゆるブレーキ操作によるブレーキオンを検出できる。
【0049】
アクセルセンサ42は、ドライバによるアクセルペダルの操作の有無やペダルの踏込量を検出するとともに、当該検出された操作の有無やペダルの踏込量に応じた信号を運転支援ECU11に送信する。これにより、運転支援ECU11は、アクセルペダルが踏み込み操作されたこと、いわゆるアクセル操作によるアクセルオンや、アクセルペダルがオフ操作されたこと、いわゆるアクセル操作の終了によるアクセルオフを検出できる。
【0050】
上記各センサからの各種信号は、それぞれ所定の周期で運転支援ECU11に送信されることから、運転支援ECU11は、上記伝達される各種信号に基づいて、車両10の速度等の車両状況や車両操作状況を逐次把握することができるようになっている。
【0051】
また、運転支援ECU11には、車速/車間制御(ACC:Adaptive Cruise Control)スイッチや、衝突回避緩和制御(PCS:Pre−Crash Safety)スイッチなどの各種操作スイッチ43が電気的に接続されている。すなわち、運転支援ECU11で車速/車間制御や衝突回避緩和制御が実行されたとき、それら制御に、本実施形態の車間距離を確保するための運転支援情報を用いるようにしてもよい。
【0052】
(作用)
次に、本実施形態の車両用情報処理装置による車間距離の学習処理について、図2に従って説明する。なお、この車間距離の学習処理は、必要に応じて随時実行されるようになっている。
【0053】
図2に示すように、車間距離の学習処理が開始されると、運転支援ECU11は、自車両10と先行車両10Aとの間の現在の車間距離が、車間距離の学習条件として定めた所定の閾値(学習距離)以内の距離であるか否かを判断する(図2のステップS10)。現在の車間距離が学習距離以内ではない、つまり学習距離より長い距離であると判断された場合(図2のステップS10でNO)、運転支援ECU11は、所定の時間間隔でステップS10の処理を繰り返す。つまり、車間距離が学習距離以内になったことが検出されることを待つ。
【0054】
一方、現在の車間距離が学習距離以内の距離であると判断された場合(図2のステップS10でYES)、運転支援ECU11は、アクセルが操作(アクセルオン)されていた時間が、車間距離の学習条件として定めた所定の時間(必要時間)以上の時間であるか否かを判断する(図2のステップS11)。このように、アクセル操作が必要時間以上である場合に限定して学習をすることにより、渋滞中などアクセル操作が頻繁に生じるような場合を除外することなどができるようになり、学習精度を向上させることができるようになる。そして、アクセルが操作されていた時間が必要時間以上ではない、つまり必要時間未満であると判断された場合(図2のステップS11でNO)、運転支援ECU11は、ステップS10でNOのときと同様、所定の時間間隔でステップS10の処理を繰り返す。つまり、車間距離が学習距離以内になったことが検出されることを待つ。
【0055】
その一方、アクセルが操作されていた時間が必要時間以上であると判断された場合(図2のステップS11でYES)、運転支援ECU11は、アクセル操作が終了(アクセルオフ)されたか否かを判断する(図2のステップS12)。アクセル操作が終了されていないと判断された場合(図2のステップS12でNO)、運転支援ECU11は、所定の時間間隔でステップS11の処理を繰り返すことで、必要時間経過後にアクセル操作が終了することが検出されることを待つ。
【0056】
すなわち、アクセル操作が終了したと判断された場合(図2のステップS12でYES)、運転支援ECU11は、現在の車間距離をアクセルオフ距離L3として学習する(図2のステップS13)。なおこのとき、アクセルオフ距離L3に併せて、現在の速度V3及び現在の位置P3をそれぞれ学習する。この学習処理では、10km/h毎に定められた車速範囲から選択された現在の速度V3が含まれる車速範囲に対し、アクセルオフ距離L3が学習されるようになっている。なお、本実施形態の学習にかかるアルゴリズムとしては種々の学習アルゴリズムを採用することができる。
【0057】
アクセルオフ距離L3が学習されると、運転支援ECU11は、ブレーキ操作(ブレーキオン)されたか否かを判断する(図2のステップS14)。ブレーキ操作されていないと判断された場合(図2のステップS14でNO)、運転支援ECU11は、ここでも現在の車間距離が閾値以内、つまり学習距離以内の距離であるか否かを判断する(図2のステップS16)。現在の車間距離が学習距離以内の距離であると判断された場合(図2のステップS16でYES)、運転支援ECU11は、所定の時間間隔でステップS14の処理を繰り返す。一方、現在の車間距離が学習距離以内の距離ではない、つまり学習距離より長いと判断された場合(図2のステップS16でNO)、運転支援ECU11は、学習処理を終了する(図2のフローの終了)。なおこのとき、ブレーキオン距離L2についてはまだ学習されないため、アクセル操作の終了(アクセルオフ)とブレーキ操作(ブレーキオン)とを一連の操作として関連付けた車間距離の学習をすることができない。このため、ステップS13で学習されたアクセルオフ距離L3等についての学習結果が取り消される。
【0058】
一方、ブレーキが操作されたと判断された場合(図2のステップS14でYES)、運転支援ECU11は、現在の車間距離をブレーキオン距離L2として学習する(図2のステップS15)。なおこのとき、ブレーキオン距離L2に併せて、現在の速度V2及び現在の位置P2をそれぞれ学習する。この学習処理では、ステップS13での学習と同様に、10km/h毎に定められた車速範囲から選択された現在の速度V2が含まれる車速範囲に対し、ブレーキオン距離L2が学習されるようになっている。これにより、アクセル操作の終了(アクセルオフ)とブレーキ操作(ブレーキオン)とが一連の操作としての関連を有した態様でそれら操作に対応する車間距離等が学習される。そして、学習処理が終了される(図2のフローの終了)。
【0059】
続いて、本実施形態の車両用情報処理装置による車間距離に対する運転支援処理について、図3〜5に従って説明する。なお、この車間距離の運転支援処理は、必要に応じて随時実行されるようになっている。
【0060】
図3に示すように、車間距離を確保するための運転支援処理が開始されると、運転支援ECU11は、自車両10と先行車両10Aとの間の現在の車間距離が、車間距離の支援条件として定めた所定の閾値(支援距離)以内の距離であるか否かを判断する(図3のステップS20)。現在の車間距離が支援距離以内の距離ではない、つまり支援距離よりも長い距離であると判断された場合(図3のステップS20でNO)、運転支援ECU11は、所定の時間間隔でステップS20の処理を繰り返す。つまり、車間距離が支援距離になったことが検出されることを待つ。
【0061】
一方、現在の車間距離が支援距離以内の距離であると判断された場合(図3のステップS20でYES)、運転支援ECU11は、現在の車速に対応した学習データがあるか否かを判断する(図3のステップS21)。つまり運転支援ECU11は、現在の車速に対応した車速範囲を選択し、その車速範囲に関連付けられて学習されたアクセルオフ距離L3及びブレーキオン距離L2の有無を判断する。そして、現在の車速に対応した学習データがないと判断された場合(図3のステップS21でNO)、運転支援ECU11は、運転支援処理を終了する(図3のフローの終了)。
【0062】
一方、現在の車速に対応した学習データがあると判断された場合(図3のステップS21でYES)、運転支援ECU11は、ドライバに対して運転支援情報を提供する支援情報提供処理S30を行う。この運転支援情報は、ブレーキECU12やエンジンECU13に提供されてもよい。
【0063】
支援情報提供処理S30では、運転支援ECU11は、現在の車間距離がアクセルオフ距離L3未満であるか否かを判断する(図3のステップS31)。このとき、現在の車間距離がアクセルオフ距離L3未満ではないと判断された場合(図3のステップS31でNO)、運転支援ECU11は、所定の時間間隔をあけてステップS20の処理に戻る。つまり、車間距離が支援距離になったことが検出されることを待つ。
【0064】
現在の車間距離がアクセルオフ距離L3未満であると判断された場合(図3のステップS31でYES)、運転支援ECU11は、「いつもの車間距離」である旨の運転支援情報を通知(出力)する(図3のステップS32)。例えば、「いつもの車間距離」である旨の運転支援情報が通知されたディスプレイ24には、その旨を示す情報が表示され、スピーカ25からはその旨を示す音が出力される。
【0065】
続いて、運転支援ECU11は、現在の車間距離がブレーキオン距離L2未満であるか否かを判断する(図3のステップS33)。このとき、現在の車間距離がブレーキオン距離L2未満ではない、つまりブレーキオン距離L2以上と判断された場合(図3のステップS33でNO)、運転支援ECU11は、運転支援の終了条件が成立したか否かを判断する(図3のステップS36)。終了条件としては、ブレーキ操作(ブレーキオン)があることや、アクセル操作(アクセルオン)があることや、現在の車間距離が支援距離以上であることや、現在の車間距離が限界距離L1未満であることなどが挙げられ、これら条件のいずれか1つ以上の条件成立に基づいて、運転支援ECU11は、運転支援の終了条件が成立したと判断する。運転支援の終了条件が成立していないと判断されると(図3のステップS36でNO)、運転支援ECU11は、所定の時間間隔をあけてステップS32戻り、「いつもの車間距離」である旨の運転支援情報を通知(出力)することを繰り返す。
【0066】
その一方、運転支援の終了条件が成立していると判断されると(図3のステップS36でYES)、運転支援ECU11は、運転支援情報の提供を終了する(図3のフローの終了)。
【0067】
ここで、現在の車間距離がブレーキオン距離L2未満であると判断されると(図3のステップS33でYES)、運転支援ECU11は、「不安な車間距離」である旨の運転支援情報を通知(出力)する(図3のステップS34)。例えば、「不安な車間距離」である旨の運転支援情報が通知されたディスプレイ24には、その旨を示す情報が表示され、スピーカ25からはその旨を示す音が出力される。そして、運転支援ECU11は、運転支援の終了条件が成立したか否かを判断する(図3のステップS35)。終了条件は、上述のステップS36と同様である。
【0068】
運転支援の終了条件が成立していないと判断されると(図3のステップS35でYES)、運転支援ECU11は、所定の時間間隔をあけてステップS34に戻り、「不安な車間距離」である旨の運転支援情報を通知(出力)することを繰り返す。なお、ステップS35でNOのとき、ステップS33に戻すようにすることで、「不安な車間距離」が「いつもの車間距離」に変化した場合、ステップS32まで戻り、「いつもの車間距離」である旨の運転支援情報を通知できるようにしてもよい。
【0069】
一方、運転支援の終了条件が成立していると判断されると(図3のステップS35でNO)、運転支援ECU11は、運転支援情報の提供を終了する(図3のフローの終了)。
次に、図5を参照して、ドライバに対して提供される運転支援情報の態様について説明する。
【0070】
図5(a)〜(c)は、車間距離を確保するための運転支援として、ディスプレイ24に表示する画像を示している。ディスプレイ24には、自車両10と、先行車両10Aと、自車両10と先行車両10Aとの間に配置されたインジケータ24Aとが表示される。そして、インジケータ24Aの色などの表示態様が車間距離に応じて変化する。本実施形態では、車間距離が支援距離以上であるなど、車間距離を確保するための運転支援が不要である場合、図5(a)に示すように、ディスプレイ24には、インジケータ24Aが目立たない色として、例えばグレー(灰色)で表示される。また、「いつもの車間距離」である旨の運転支援情報が通知された場合、図5(b)に示すように、ディスプレイ24には、インジケータ24Aが現在の車間距離を肯定する色として、例えば青色で表示される。さらに、「不安な車間距離」である旨の運転支援情報が通知された場合、図5(c)に示すように、ディスプレイ24には、インジケータ24Aが現在の車間距離に注意を喚起する色として、例えば赤色で表示される。
【0071】
このように、ディスプレイ24に表示されたインジケータ24Aをドライバが参照することによって、ドライバの車両操作を、車間距離をインジケータ24Aが青色で示す範囲に維持させるように促すことができるようになる。これによって、先行車両10Aとの車間距離を確保するための運転支援を提供することができるようになる。
【0072】
以上説明したように、本実施形態の車両用情報処理装置によれば、以下に列記するような効果が得られるようになる。
(1)アクセルペダルのオフ操作(アクセルオフ)からブレーキペダルの踏み込み操作(ブレーキオン)までの一連の流れで先行車両10Aとの車間距離を学習目的で記憶していくようにした。このため、車両用情報を処理するうえでのドライバの車両操作特性、特にここでは、先行車両10Aとの車間距離に対するドライバ自身の認識レベルがより明確となり、例えば先行車両10Aとの車間距離を確保するための運転支援を行う場合などの情報解析精度、支援精度等の更なる向上が期待される。これによれば、例えば運転支援に対するドライバの違和感を少なくすることができるようにもなる。
【0073】
(2)ドライバの車両操作特性として、都度の速度も記憶するため、記憶されたアクセルオフ距離L3及びブレーキオン距離L2に対する運転支援を車速に基づいて行なうことができるようになる。このため、例えば先行車両10Aとの車間距離を確保するための運転支援を行う場合などの情報解析精度、支援精度等の向上が更に期待される。
【0074】
(3)車速範囲に対応するようにアクセルオフ距離L3及びブレーキオン距離L2を学習するようにした。このため、運転支援の解析精度や支援制度等を維持しつつ、運転支援に要するデータ量を減らすことができるようになる。
【0075】
(4)情報解析精度、支援精度等を向上させることのできるように学習されたアクセルオフ距離L3とブレーキオン距離L2に基づいて運転支援情報を提供することができるため、精度の高い運転支援が提供できるようになるとともに、こうして提供する運転支援をドライバにとって違和感の少ないものにすることができる。
【0076】
(5)アクセルオフ距離L3及びブレーキオン距離L2に基づいて提供される運転支援情報の態様が比較結果に応じて「いつもの車間距離」又は「不安な車間距離」に変化するため、この運転支援情報を用いることで、運転支援の内容を車間距離にあわせて変化させることができるようにもなる。例えば、例えばディスプレイ24に表示されるインジケータ24Aの色を、車間距離に応じて段階的に変化させるようにすることで、ドライバにとって違和感の少ない運転支援を提供することができるようにもなる。
【0077】
(その他の実施形態)
なお、上記実施形態は、例えば以下のような態様にて実施することもできる。
・上記実施形態では、現在の車速を含む車速範囲に対応する学習データがない場合(図3のステップS21でNO)、運転支援が行われない場合について例示した。しかしこれに限らず、現在の車速を含む車速範囲に対応する学習データがない場合、他の学習データを代用してもよい。例えば、図6に示すように、現在の車速に対応した学習データがあると判断された場合(図6のステップS21でYES)、現在の車速に対応する速度範囲の学習データに基づいて運転支援を行うことを設定し(図6のステップS22)、支援情報提供処理S30を行うようにすればよい。一方、現在の車速に対応した学習データがないと判断された場合(図6のステップS21でNO)、運転支援ECU11は、代替データ選択処理S40をしてもよい。代替データ選択処理S40では、一つ上の車速範囲に学習データがあるか否かを判断し(図6のステップS41)、該学習データがなかった場合(図6のステップS41でNO)、運転支援処理を終了するようにすればよい(図6のフローの終了)。一方、該学習データがあった場合(図6のステップS41でYES)、現在の車速に対応する速度範囲よりも一つ上の車速範囲の学習データに基づいて運転支援を行うことを設定し(図6のステップS42)、支援情報提供処理S30を行うようにすればよい。
【0078】
このように現在の車間距離との比較に、現在の車速よりも高い速度に対応するアクセルオフ車間距離及びブレーキオン車間距離を用いることで、現在の車速に対応するアクセルオフ車間距離やブレーキオン車間距離が得られない場合であっても、車間距離に対する運転支援を提供することができるようになる。
【0079】
また、現在の車速よりも高い速度に対応するアクセルオフ車間距離やブレーキオン車間距離を比較に用いることで、車間距離が広めに確保されるため、運転支援が不安定になるおそれがない。
【0080】
これにより、運転支援を提供できる可能性が高められ、この車両用情報処理装置の利便性が高められるようになる。
・また例えば、図7に示すように、代替データ選択処理S40では、当該地点における、現在の車速が「いつもの車速」よりも一定値(低速値)以上低いか否を判断し(図7のステップS43)、現在の車速が低速値以上低くなかった場合(図7のステップS43でNO)、運転支援処理を終了するようにしてもよい(図6のフローの終了へ)。なお、低速値は、予め設定されている速度の値でもよいし、普段の走行速度から所定の数値を引いて求められた速度の値など、普段の走行速度に基づいて算出される速度の値でもよい。
【0081】
一方、該現在の車速が低速値以上低かった場合(図7のステップS43でYES)、「いつもの車速」に対応するアクセルオフ距離を一定距離だけ長くするように調整した距離に基づいて、つまり調整した学習データに基づいて運転支援を行うことを設定し(図7のステップS44)、支援情報提供処理S30を行うようにすればよい。例えば、低速値を渋滞走行と判断できる値に設定し、アクセルオフ距離に代えて、アクセルオフ距離に当該低速値が加算調整された距離が運転支援に用いられるようにしている。これにより、アクセルオフ距離が長くなり、車間距離が広く確保されるように運転支援が行われる。例えば、渋滞時には車間距離を広げることで、燃費改善効果や渋滞緩和効果が高まることが期待されている。これにより、運転支援を提供できる可能性が高められ、この車両用情報処理装置の利便性が高められるようになる。
【0082】
・上記実施形態では、ディスプレイ24に運転支援に基づく警報等を表示する場合について例示したが、これに限らず、カーナビゲーションなどの表示装置に、ドライバに対して注意を喚起するために運転支援ECU11から入力された運転支援の情報(警告情報など)に応じた通知表示(警告表示)等の画像データを表示させてもよい。この場合、ディスプレイがなくても運転支援が提供できる。これにより、車両用情報処理装置としての構成の自由度などが向上するようになる。
【0083】
・上記実施形態では、スピーカ25から運転支援に基づく警報音等を発生させる場合について例示したが、これに限らず、カーナビゲーションなどの音声装置に、ドライバに対して注意を喚起するために運転支援ECU11から入力された運転支援の情報に応じた音声情報などを出力させてもよい。この場合、スピーカがなくても運転支援が提供できる。これにより、車両用情報処理装置としての構成の自由度などが向上するようになる。
【0084】
・上記実施形態では、車載レーダ34としてレーザ光を用いる場合について例示したが、しかしこれに限らず、車間距離を測定することができるのであれば、車載レーダは、音を用いるものや、電波を用いるものなどレーザ光以外のレーダであってもよい。これにより、車両用情報処理装置の構成の自由度が高められる。
【0085】
・上記実施形態では、車間距離を測定する手段が車載カメラ33、又は車載レーダ34である場合について例示したが、これに限らず、車間距離を測定することができれば、車間距離を測定する手段は、外部インフラ装置のカメラなど車載レーダ以外の手段であってもよい。これにより、車両用情報処理装置の構成の自由度が高められる。
【0086】
・上記実施形態では、運転支援処理において、車両10の現在の速度に基づいて学習データを探す場合について例示したが、これに限らず、車両の現在の速度とともに、車両の現在の位置に基づいて学習データを探すようにしてもよい。このように、位置情報を加えることで、支援精度の向上が期待される。
【0087】
・上記実施形態では、車両10におけるドライバの車両操作に基づいてアクセルオフ距離L3やブレーキオン距離L2が学習される場合について例示した。このとき、車両がドライバを認識したり車両にドライバを設定するようにして、ドライバ毎に車両操作を学習してもよい。このように、特定のドライバに特化する学習で、特定のドライバに対する情報解析の精度、支援制度の向上が期待でき、ドライバに適合した運転支援を提供することができる。これによって、車両用情報処理装置の利便性の向上が図られるようにもなる。
【0088】
・上記実施形態では、車速範囲の領域幅を10km/hに定めた場合を例示した。しかしこれに限らず、車速範囲の領域幅を10km/hより大きくしてもよいし、小さくしてもよい。また、各車速範囲の領域幅が異なっていてもよい。すなわち、10km/hの領域幅を有する車速範囲と、15km/hの領域幅を有する車速範囲とがあってもよい。これにより、車両用情報処理装置としての情報処理の自由度が向上するようになる。
【0089】
・上記実施形態では、アクセルオフ距離L3が学習された後にブレーキオン距離L2が学習されなかったとき、学習されたアクセルオフ距離L3の学習結果を取り消す場合について例示した。しかしこれに限らず、アクセルオフ距離やブレーキオン距離のみが学習されてもよい。例えばアクセルオフ距離のみを学習する場合、既に学習されているブレーキオン距離に対応付けるようにするとともに、対応付けできれば一連の操作として扱うこともできる。また、例えばブレーキオン距離のみを学習する場合、既に学習されているアクセルオフ距離に対応付けるようにするとともに、対応付けできれば一連の操作として扱うこともできる。これにより、車両用情報処理装置としての用途の拡大が測れるようになる。
【0090】
・上記実施形態では、現在の車間距離が学習距離以内の距離のときは、学習処理を開始する場合(図2のステップS10)について例示した。しかしこれに限らず、先行車両との車間距離が頻繁に変化する交差点付近やカーブ時などの箇所では学習処理を開始しないようにしてもよい。これにより、学習されるアクセルオフ距離やブレーキオン距離が好適に学習されるようになるため、車両用情報処理装置としても情報解析精度や支援精度を向上させることができるようになる。
【0091】
・上記実施形態では、現在の車間距離が支援距離以内の距離のときは、運転支援処理を開始する場合(図3のステップS20)について例示した。しかしこれに限らず、先行車両との車間距離が頻繁に変化する交差点付近やカーブ時などの箇所では運転支援処理を実施しないようにしてもよい。これにより、車間距離に対する運転支援の効果があまり得られず、運転支援がかえってドライバに煩わしさを感じさせるおそれのあるようなことを防ぐことができるようになる。これにより、車両用情報処理装置による車間距離に対する支援精度の向上が図られるようになる。
【符号の説明】
【0092】
10…車両、10A…先行車両、11…運転支援ECU(運転支援コントロールコンピュータ)、12…ブレーキECU(ブレーキコントロールコンピュータ)、13…エンジンECU(エンジンコントロールコンピュータ)、20…カーナビゲーション、21…補助記憶装置、24…ディスプレイ、24A…インジケータ、25…スピーカ、31…インフラ通信装置、32…GPS、32…全地球測位システム、33…車載カメラ、34…車載レーダ、40…車速センサ、41…ブレーキセンサ、42…アクセルセンサ、43…操作スイッチ。
【特許請求の範囲】
【請求項1】
先行車両との車間距離を測定する手段を有して車両用情報の処理を行う車両用情報処理装置であって、
車両のアクセルペダルがオフ操作された時の先行車両との車間距離であるアクセルオフ車間距離と、このアクセルペダルのオフ操作に引き続き車両のブレーキペダルが踏み込み操作された時の先行車両との車間距離であるブレーキオン車間距離とをそれぞれ関連付けして記憶する手段を備える
ことを特徴とする車両用情報処理装置。
【請求項2】
前記アクセルオフ車間距離及び前記ブレーキオン車間距離が、その都度の車速に更に関連付けされて記憶される
請求項1に記載の車両用情報処理装置。
【請求項3】
前記車速に関連付けされた前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶が、所定の車速範囲の領域毎に区別して行われる
請求項2に記載の車両用情報処理装置。
【請求項4】
前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶がドライバの別に行われる
請求項1〜3のいずれか一項に記載の車両用情報処理装置。
【請求項5】
前記記憶されたアクセルオフ車間距離及びブレーキオン車間距離の少なくとも一方を現在の車間距離と比較することに基づいて、運転支援情報を提供する手段を更に備える
請求項1〜4のいずれか一項に記載の車両用情報処理装置。
【請求項6】
現在の車間距離が前記アクセルオフ車間距離以上であるか否か、及び、前記ブレーキオン車間距離以上であるか否かに基づいて提供する運転支援情報を変化させる
請求項5に記載の車両用情報処理装置。
【請求項7】
車両の速度を計測する手段から得られた現在の車両の速度に対応するアクセルオフ車間距離及びブレーキオン車間距離が前記記憶する手段に記憶されていないとき、現在の車両の速度よりも高い速度に対応するアクセルオフ車間距離及びブレーキオン車間距離を現在の車間距離と比較することに基づいて、運転支援情報を提供する
請求項5又は6に記載の車両用情報処理装置。
【請求項8】
先行車両との車間距離を測定する手段を有して車両用情報の処理を行う車両用情報処理方法であって、
車両のアクセルペダルがオフ操作された時の先行車両との車間距離であるアクセルオフ車間距離と、このアクセルペダルのオフ操作に引き続き車両のブレーキペダルが踏み込み操作された時の先行車両との車間距離であるブレーキオン車間距離とをそれぞれ関連付けして記憶する工程を備える
ことを特徴とする車両用情報処理方法。
【請求項9】
前記アクセルオフ車間距離及び前記ブレーキオン車間距離を、その都度の車速に更に関連付けて記憶する
請求項8に記載の車両用情報処理方法。
【請求項10】
前記車速に関連付けされた前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶を、所定の車速範囲の領域毎に区別して行う
請求項9に記載の車両用情報処理方法。
【請求項11】
前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶をドライバの別に行う
請求項8〜10のいずれか一項に記載の車両用情報処理方法。
【請求項1】
先行車両との車間距離を測定する手段を有して車両用情報の処理を行う車両用情報処理装置であって、
車両のアクセルペダルがオフ操作された時の先行車両との車間距離であるアクセルオフ車間距離と、このアクセルペダルのオフ操作に引き続き車両のブレーキペダルが踏み込み操作された時の先行車両との車間距離であるブレーキオン車間距離とをそれぞれ関連付けして記憶する手段を備える
ことを特徴とする車両用情報処理装置。
【請求項2】
前記アクセルオフ車間距離及び前記ブレーキオン車間距離が、その都度の車速に更に関連付けされて記憶される
請求項1に記載の車両用情報処理装置。
【請求項3】
前記車速に関連付けされた前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶が、所定の車速範囲の領域毎に区別して行われる
請求項2に記載の車両用情報処理装置。
【請求項4】
前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶がドライバの別に行われる
請求項1〜3のいずれか一項に記載の車両用情報処理装置。
【請求項5】
前記記憶されたアクセルオフ車間距離及びブレーキオン車間距離の少なくとも一方を現在の車間距離と比較することに基づいて、運転支援情報を提供する手段を更に備える
請求項1〜4のいずれか一項に記載の車両用情報処理装置。
【請求項6】
現在の車間距離が前記アクセルオフ車間距離以上であるか否か、及び、前記ブレーキオン車間距離以上であるか否かに基づいて提供する運転支援情報を変化させる
請求項5に記載の車両用情報処理装置。
【請求項7】
車両の速度を計測する手段から得られた現在の車両の速度に対応するアクセルオフ車間距離及びブレーキオン車間距離が前記記憶する手段に記憶されていないとき、現在の車両の速度よりも高い速度に対応するアクセルオフ車間距離及びブレーキオン車間距離を現在の車間距離と比較することに基づいて、運転支援情報を提供する
請求項5又は6に記載の車両用情報処理装置。
【請求項8】
先行車両との車間距離を測定する手段を有して車両用情報の処理を行う車両用情報処理方法であって、
車両のアクセルペダルがオフ操作された時の先行車両との車間距離であるアクセルオフ車間距離と、このアクセルペダルのオフ操作に引き続き車両のブレーキペダルが踏み込み操作された時の先行車両との車間距離であるブレーキオン車間距離とをそれぞれ関連付けして記憶する工程を備える
ことを特徴とする車両用情報処理方法。
【請求項9】
前記アクセルオフ車間距離及び前記ブレーキオン車間距離を、その都度の車速に更に関連付けて記憶する
請求項8に記載の車両用情報処理方法。
【請求項10】
前記車速に関連付けされた前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶を、所定の車速範囲の領域毎に区別して行う
請求項9に記載の車両用情報処理方法。
【請求項11】
前記アクセルオフ車間距離及び前記ブレーキオン車間距離の記憶をドライバの別に行う
請求項8〜10のいずれか一項に記載の車両用情報処理方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2013−68115(P2013−68115A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−205879(P2011−205879)
【出願日】平成23年9月21日(2011.9.21)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月21日(2011.9.21)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]