
車両用情報処理装置
【課題】 要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供する。
【解決手段】 車両用情報処理装置は、要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出部21と、車両の減速等操作を検出する減速等操作検出部24と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習部26と、を備え、減速等操作位置学習部26は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習する。
【解決手段】 車両用情報処理装置は、要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出部21と、車両の減速等操作を検出する減速等操作検出部24と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習部26と、を備え、減速等操作位置学習部26は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用情報処理装置に係り、特に、交差点などの車両が減速を要する要減速地点における車両の操作を学習する車両用情報処理装置に関する。
【背景技術】
【0002】
車両の制御を行うにあたり、交差点などの車両の減速が必要となる要減速地点において、ドライバに対してブレーキ操作を促す車両用運転支援装置が開示されている(たとえば、特許文献1参照)。この車両用運転支援装置は、要減速地点を地図データベースに記憶しておき、要減速地点の所定距離手前の地点において、ドライバに対してブレーキ操作を誘導するというものである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−221889号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記特許文献1に開示された車両用運転支援装置においては、ドライバの意図とは無関係にブレーキ操作の誘導を開始する誘導開始地点を決定するようにしていた。このため、ドライバの運転嗜好に応じたブレーキ操作の誘導開始地点(減速等操作開始位置)を決定することができなかった。したがって、たとえば制動制御を行って、ブレーキ操作を開始するとしても、ドライバの嗜好に応じた位置で制動制御を開始することができず、あるいはドライバに運転操作を促進するとしても、適切な促進開始位置を決定することができないという問題があった。
【0005】
そこで、本発明の課題は、要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決した本発明に係る車両用情報処理装置は要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出手段と、車両の減速等操作を検出する減速等操作検出手段と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習手段と、を備え、減速等操作位置学習手段は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習することを特徴とする。
【0007】
本発明に係る車両用情報処理装置は、減速等操作位置学習手段は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習している。このため、要減速地点におけるドライバの意図に応じた減速等操作開始位置を学習に反映させることができる。したがって、要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【0008】
なお、本発明における「要減速地点」とは、車両の減速が要求される位置であり、たとえば交差点、カーブ路の進入点、踏切などを挙げることができる。また、「減速等操作」とは、要減速地点においてドライバが行うと想定される操作であり、代表的には減速操作があり、その他ステアリング操作などを挙げることができる。さらに、「減速等操作開始位置」とは、要減速地点の手前位置であって、減速等操作を開始する地点である。
【0009】
ここで、車両の周辺情報を検出する周辺情報検出手段と、車両の走行状態を検出する走行状態検出手段と、車両における要減速地点までの距離を補正する距離補正手段と、を備え、距離補正手段は、周辺情報検出手段で検出された周辺情報に基づいて算出される車両から要減速地点までの距離を、走行状態検出手段で検出された走行状態に基づいて補正する態様とすることができる。
【0010】
車両の周辺情報を検出する周辺情報検出手段では、要減速地点までの距離の検出精度が低くなってしまう。そこで、周辺情報検出手段で検出された周辺情報に基づいて算出される車両から要減速地点までの距離を、走行距離検出手段で検出された走行距離に基づいて補正している。走行距離検出手段では、要減速地点までの距離を高い精度で検出することができるので、要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置をより精度よく決定することができる。したがって、より精度よくドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【0011】
また、車両から要減速地点までの距離が所定距離以下となった場合に、距離補正手段によって車両から要減速地点までの距離を算出する際の走行距離検出手段で検出された走行距離の寄与率を大きくする態様とすることができる。
【0012】
このように、車両から要減速地点までの距離が所定距離以下となった場合に、距離補正手段によって車両から要減速地点までの距離を算出する際の走行距離検出手段で検出された走行距離の寄与率を大きくすることにより、さらに精度よくドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【0013】
また、周辺情報検出手段で検出された周辺情報に基づいて算出される車両から要減速地点までの距離が所定距離以下となった後、車両から要減速地点までの距離が所定距離以上増加した場合に、増加した地点での周辺情報検出手段で検出された周辺情報に基づいて算出される車両から要減速地点までの距離を、走行状態検出手段で検出された走行状態に基づいて補正する態様とすることができる。
【0014】
車両が進む経路によっては、車両から要減速地点までの距離が所定距離以下となった後、車両から要減速地点までの距離が増加する場合がある。そこで、増加した地点での周辺情報検出手段で検出された周辺情報に基づいて算出される車両から要減速地点までの距離を、走行状態検出手段で検出された走行状態に基づいて補正することにより、さらに精度よくドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【発明の効果】
【0015】
本発明に係る車両用情報処理装置によれば、要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態に係る車両用情報処理装置のブロック構成図である。
【図2】車両から対象交差点までの実際の距離と、ナビゲーション装置から送信される距離との関係を示すグラフである。
【図3】車両用情報処理装置の処理手順を示すフローチャートである。
【図4】車両から対象交差点までの実際の距離と、ナビゲーション装置から送信される距離との関係を示すグラフである。
【図5】車両から対象交差点までの実際の距離と、ナビゲーション装置から送信される距離との関係を示すグラフである。
【図6】距離補正部の処理手順を示すフローチャートである。
【図7】カーブが連続して存在する場合の車両から対象交差点までの実際の距離と、ナビゲーション装置から送信される距離との関係を示すグラフである。
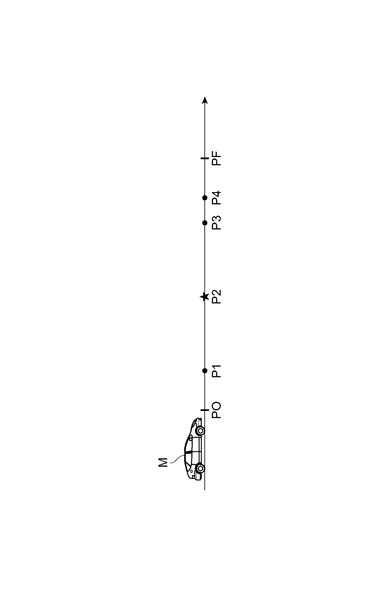
【図8】減速等操作を行った位置を示す図である。
【発明を実施するための形態】
【0017】
以下、添付図面を参照して本発明の実施形態について説明する。なお、図面の説明において同一の要素には同一の符号を付し、重複する説明を省略する。また、図示の便宜上、図面の寸法比率は説明のものと必ずしも一致しない。
【0018】
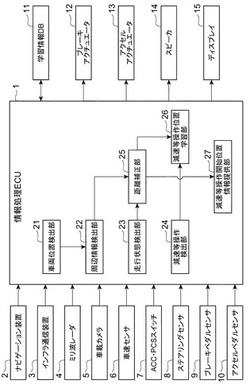
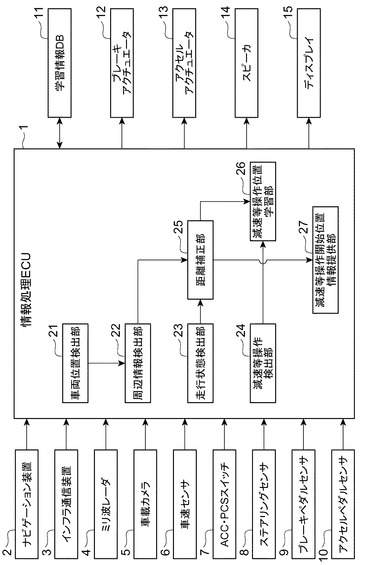
図1は、本発明の実施形態に係る車両用情報処理装置のブロック構成図である。図1に示すように、本実施形態に係る車両用情報処理装置は、情報処理ECU1を備えている。情報処理ECU(Electric Control Unit)1には、ナビゲーション装置2、インフラ通信装置3、ミリ波レーダ4、車載カメラ5、および車速センサ6が接続されている。
【0019】
また、情報処理ECU1には、アダプティブクルーズコントロール(Adaptive Cruise Control、以下「ACC」という)・プリクラッシュセーフティシステム(Pre-Crash Safety system、以下「PCS」という)スイッチ7、ステアリングセンサ8、ブレーキペダルセンサ9、およびアクセルペダルセンサ10が接続されている。さらに、情報処理ECU1には、学習情報データベース(以下「DB」という)11、ブレーキアクチュエータ12、アクセルアクチュエータ13、スピーカ14、およびディスプレイ15が接続されている。
【0020】
また、情報処理ECU1には、車両位置検出部21、周辺情報検出部22、走行状態検出部23、および減速等操作検出部24が設けられている。さらに、情報処理ECU1には、距離補正部25、減速等操作位置学習部26、および減速等操作開始位置情報提供部27が設けられている。
【0021】
ナビゲーション装置2は、車両の現在位置や目的地までの経路情報を、運転者に提供するための装置である。また、ナビゲーション装置2は、車両が走行する道路に関する地図情報DBを備えており、車両が現在走行している正確な位置である現在位置を取得する。さらに、ナビゲーション装置2は、要減速地点であるたとえば交差点(以下「対象交差点」という)までの距離に関する距離情報を取得する。地図情報DBは、本発明の地図情報記憶手段を構成する。
【0022】
ナビゲーション装置2は、取得した車両が現在走行している位置に関する走行位置情報や車両の走行位置の近傍における地図情報を情報処理ECU1に送信する。また、ナビゲーション装置2は、車両が現在走行しているリンクのリンクIDや車両の進行方向に位置する対象交差点の交差点IDに関するID情報、さらには、対象交差点までの距離に関する距離情報などを情報処理ECU1に送信する。さらに、ナビゲーション装置2では、対象交差点などの対象交差点までの距離が所定の規定値より長い場合には、この規定値に応じた距離情報を情報処理ECU1に送信する。ナビゲーション装置2は、本発明の車両位置検出手段および周辺情報検出手段を構成する。
【0023】
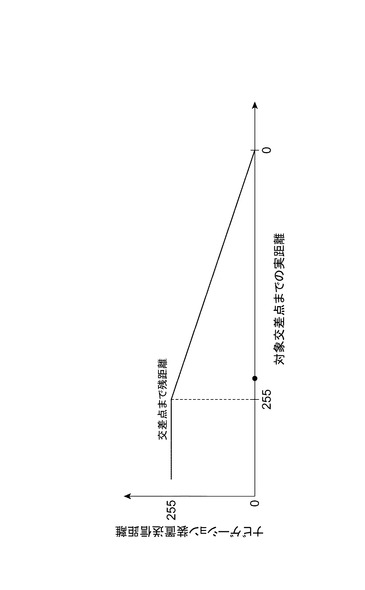
たとえば、図2に示すように、所定の規定値が255mである場合には、対象交差点までの距離が255m以上である場合には、対象交差点までの距離が255mである距離情報を情報処理ECU1に送信する。また、対象交差点までの距離が255m未満となった場合に、対象交差点までの距離を示す距離情報を情報処理ECU1に送信する。
【0024】
インフラ通信装置3は、主要道路などに設けられた路側装置や基地局との間で双方向通信を行う通信装置である。インフラ通信装置3は、路側装置や基地局との間における双方向通信によってたとえば対象交差点までの距離に関する距離情報を取得する。インフラ通信装置3は、路側装置や基地局から取得した距離情報を情報処理ECU1に送信する。
【0025】
ミリ波レーダ4は、ミリ波を利用して前方の物体を検出するレーダである。ミリ波レーダ4は、自動車の前面の中央に取り付けられる。ミリ波レーダ4では、ミリ波を自車両から前方に向けて出射し、対象交差点に設けられた信号機などから反射してきたミリ波を受信する。そして、ミリ波レーダ4では、出射から受信までの時間を計測することによって自車両から対象交差点までの距離を算出する。ミリ波レーダ4は、算出した自車両から交差点までの距離に関する距離情報を情報処理ECU1に送信する。
【0026】
車載カメラ5は、たとえば車両前部に設けられており、車両が走行する道路の前方における路面や対象交差点における信号等を撮像する。車載カメラ5は、撮像した画像に基づいて自車両から対象交差点までの距離を算出する。車載カメラ5は、算出した自車両から対象交差点までの距離に関する距離情報を情報処理ECU1に送信する。
を路面画像情報として情報処理ECU1に送信するとともに、撮像した車両前方の画像を前方画像情報として情報処理ECU1に送信する。
【0027】
車速センサ6は、たとえば車両の車輪部に設けられ、車輪の回転数を検出しており、検出した車輪の回転数から走行状態としての車速を算出している。車速センサ6は、算出した車速に基づく車速情報を情報処理ECU1に送信する。車速センサ6は、本発明の走行状態検出手段を構成する。
【0028】
ACC・PCSスイッチ7は、たとえば自車両のステアリングに設けられており、ドライバの操作によって、ACCを行うか否かについてのON−OFFが可能とされている。また、ドライバの操作によって、PCSを行うか否かについてのON−OFFが可能とされている。ACC・PCSスイッチ7は、ACCがONとなっているか否かに関するACCON−OFF情報、PCSがONとなっているか否かに関するPCSON−OFF情報を情報処理ECU1に送信する。
【0029】
ステアリングセンサ8は、たとえばステアリングに連結されたステアリングシャフトに取り付けられており、ステアリングを操作した場合におけるステアリングの操舵角を検出する。ステアリングセンサ8は、検出したステアリングの操舵角に基づくステアリング情報を情報処理ECU1に送信する。
【0030】
ブレーキペダルセンサ9は、たとえばブレーキペダルに設けられており、ブレーキペダルのストローク量を検出している。ブレーキペダルセンサ9は、検出したブレーキペダルのストローク量をブレーキ操作量情報として情報処理ECU1に送信する。アクセルペダルセンサ10は、たとえばアクセルペダルに設けられており、アクセルペダルのストローク量を検出している。アクセルペダルセンサ10は、検出したアクセルペダルのストローク量をアクセル操作量情報として情報処理ECU1に送信する。ステアリングセンサ8、ブレーキペダルセンサ9、アクセルペダルセンサ10は、本発明の減速等操作検出手段を構成する。
【0031】
学習情報DB11は、情報処理ECU1において学習された学習情報を対象交差点ごとに記憶している。学習情報DB11に記憶されている学習情報には、対象交差点から所定の範囲内における減速操作やステアリング操作(以下、「減速等操作」という)を開始した位置(以下、「減速等操作開始位置」という)に関する情報および減速等操作の内容に関する情報が含まれる。この学習情報としては、減速等操作開始位置における対象交差点からの離間距離に対応付けられた減速等操作の内容に関する情報が含まれる。学習情報DB11は、情報処理ECU1における周辺情報検出部22や減速等操作開始位置情報提供部27の読み出しに応じて、記憶している学習情報を情報処理ECU1に送信する。
【0032】
情報処理ECU1における車両位置検出部21は、ナビゲーション装置2から送信される走行位置情報および地図情報を取得し、取得した走行位置情報に基づいて、車両の現在位置を取得する。車両位置検出部21は、取得した車両の現在位置に関する現在位置信号を地図情報に基づく地図信号とともに周辺情報検出部22に出力する。
【0033】
周辺情報検出部22は、ナビゲーション装置2やインフラ通信装置3から送信されるID情報や距離情報、さらには車両位置検出部21から出力された現在位置信号および地図信号に基づいて、車両から対象交差点までの残距離を暫定的に取得する。対象交差点については、ナビゲーション装置2から送信されるID情報に基づいて判断する。
【0034】
ここで、ナビゲーション装置2やインフラ通信装置3から送信される距離情報が異なる場合には、どちらかを優先して採用することもできるし、これらを平均等の算術処理した値を採用することもできる。周辺情報検出部22は、取得した車両から対象交差点までの距離に基づく暫定残距離信号を地図信号とともに距離補正部25に出力する。
【0035】
走行状態検出部23は、ミリ波レーダ4や車載カメラ5から送信される距離情報に基づいて、対象交差点の近傍に到達し、対象交差点までの距離を検出できる場合に車両から対象交差点までの距離を検出する。あるいは、車速センサ6から送信される車速情報に基づいて、車両の走行距離を算出する。走行状態検出部23は、検出した対象交差点までの残距離を残距離信号として距離補正部25に出力し、車両の走行距離を走行距離信号として距離補正部25に出力する。
【0036】
減速等操作検出部24は、ブレーキペダルセンサ9から送信されるブレーキペダル情報やアクセルペダルセンサ10から送信されるアクセルペダル情報に基づいて、車両の減速操作を検出する。具体的に、ブレーキペダルの踏み込み量が大きくなったり、アクセルペダルの踏み込み量が小さくなったりした場合に、減速操作があったことを検出する。減速等操作を検出するにあたり、具体的には、アクセルペダルを戻す操作やブレーキペダルを踏み込む操作があったときに減速操作を検出し、ステアリングの切角が所定角度以上と成ったときにステアリング操作を検出することができる。
【0037】
さらに、減速等操作検出部24は、ステアリングセンサ8から送信されるステアリング情報に基づいて、車両のステアリング操作を検出する。減速等操作検出部24は、減速操作やステアリング操作といった減速等操作を検出した場合に、減速等操作信号を減速等操作位置学習部26に出力する。
【0038】
距離補正部25は、周辺情報検出部22から出力された暫定残距離信号について、走行状態検出部23から出力された走行距離信号を用いて補正し、補正残距離を算出する。あるいは、走行状態検出部23から残距離信号が出力された場合には、暫定算距離信号に代えて残距離信号に応じた残距離を補正残距離とする。
【0039】
このように、距離補正部25は、走行状態検出部23から出力された走行距離信号や残距離信号を用いて補正を行うことにより、車両から対象交差点までの距離を求める際に、車速情報から算出される走行距離の寄与率を大きくするようにしている。距離補正部25は、算出した補正残距離に基づく補正残距離信号を地図情報とともに減速等操作位置学習部26に出力する。情報処理ECU1は、本発明の距離補正手段を構成する。
【0040】
減速等操作位置学習部26は、減速等操作検出部24から出力された減速等操作信号、距離補正部25から出力された補正残距離信号および地図情報に基づいて、車両が減速等操作を開始した位置である減速等操作開始位置を取得する。減速等操作位置学習部26は、この減速等操作開始位置の対象交差点に対する位置を学習し、学習した減速等操作開始位置を対象交差点に対応付けて学習情報DB11に記憶させる。情報処理ECU1は、本発明の減速等操作位置学習手段を構成する。
【0041】
減速等操作開始位置情報提供部27は、ナビゲーション装置2から送信される地図情報または距離補正部25から出力される補正算距離信号に基づいて、車両における対象交差点までの距離を取得する。減速等操作開始位置情報提供部27は、車両における対象交差点までの距離を取得した際、この対象交差点における学習情報を学習情報DB11から読み出す。
【0042】
減速等操作開始位置情報提供部27は、車両における対象交差点に対する位置が、学習情報DB11から読み出した減速等操作開始位置となっている場合に、ブレーキアクチュエータ12、アクセルアクチュエータ13、スピーカ14、およびディスプレイ15に減速操作開始情報を送信する。さらには、ステアリング操作開始情報をスピーカ14、およびディスプレイ15に減速操作開始情報を送信する。
【0043】
ブレーキアクチュエータ12は、情報処理ECU1における減速等操作開始位置情報提供部27から減速操作開始情報が送信された場合に、ブレーキを作動させて車両を減速させる。アクセルアクチュエータ13は、情報処理ECU1における減速等操作開始位置情報提供部27から減速操作開始情報が送信された場合に、アクセル開度を緩めて車両を減速させる。
【0044】
また、スピーカ14は、情報処理ECU1における減速等操作開始位置情報提供部27から減速操作開始情報が送信された場合に、車両が減速を開始することを報知する減速開始音を出力する。さらに、減速等操作開始位置情報提供部27からステアリング操作開始情報が送信された場合に、ドライバにステアリング操作を促すステアリング操作開始促進音を出力する。
【0045】
ディスプレイ15は、情報処理ECU1における減速等操作開始位置情報提供部27から減速操作開始情報が送信された場合に、車両が減速を開始することを報知する減速開始情報を表示する。減速等操作開始位置情報提供部27からステアリング操作開始情報が送信された場合に、ドライバにステアリング操作を促すステアリング操作開始情報を表示する。
【0046】
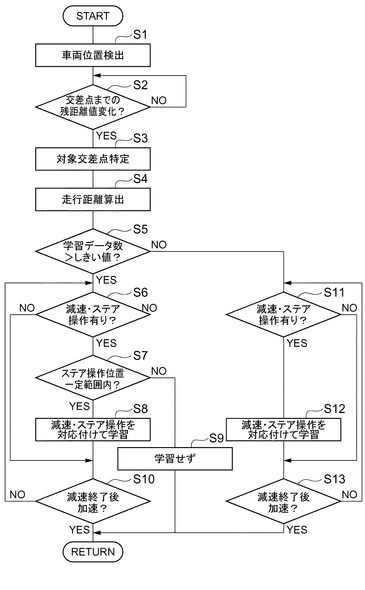
続いて、本実施形態に係る車両用情報処理装置における動作について説明する。図3は、本実施形態に係る車両用情報処理装置の処理手順を示すフローチャートである。図3に示すように、本実施形態に係る車両用情報処理装置においては、まず、車両位置検出部21において、ナビゲーション装置2から送信される走行位置情報に基づいて車両の位置を検出する(S1)。
【0047】
次に、周辺情報検出部22において、車両位置検出部21から出力される現在位置信号およびナビゲーション装置2から送信される距離情報に基づいて、対象交差点までの残距離を取得し、対象交差点までの残距離が変化したか否かを判断する(S2)。ここで、ナビゲーション装置2では、図2に示すように、車両の現在位置と対象交差点までの残距離を算出し、算出した距離が所定のしきい値、たとえば255m以上である場合には、距離情報として対象交差点までの距離が255mとなる距離情報を送信する。
【0048】
このため、周辺情報検出部22では、車両から対象交差点までの残距離が255m以上と遠い場合には、対象交差点までの残距離は変化しないと判断し、ステップS2の処理を繰り返す。一方、車両から対象交差点までの残距離が255mとなった場合には、ナビゲーション装置2から送信される距離情報に基づく対象交差点までの残距離が短くなる。このため、周辺情報検出部22においては、対象交差点までの残距離が変化したと判断することとなる。
【0049】
周辺情報検出部22において、対象交差点までの残距離が変化したと判断した場合には、対象交差点を特定する(S3)。対象交差点の特定は、残距離が255m未満となった交差点に対応するナビゲーション装置2から送信されるID情報を参照して特定することができる。
【0050】
続いて、距離補正部25において、車両から対象交差点までの残距離が255mとなった地点から車両が走行した距離を算出する(S4)。ここでの車両が走行した距離は、走行状態検出部23から出力される車速センサ6から送信された車速情報に基づく車速を積分することによって求めることができる。あるいは、ミリ波レーダ4から送信された距離情報や車載カメラ5から送信された距離情報を用いることもできる。
【0051】
距離補正部25では、ステップS2で取得した残距離およびステップS4で算出した走行距離に応じた走行距離信号に基づいて、車両から対象交差点までの距離を補正する。具体的には、車両が対象交差点から255mの位置に到達した後、車両が走行した走行距離を255mから減算することによって車両から対象交差点までの残距離を補正残距離として算出する。
【0052】
続いて、学習情報DB11に記憶されている学習データのうち、ここでの対象交差点についての学習データ数が所定のしきい値を超えているか否かを判断する(S5)。所定のしきい値は適宜設定されており、たとえば5回や10回、あるいはその他の回数とすることができる。
【0053】
このとき、対象交差点についての学習データ数が所定のしきい値を超えていると判断した場合には、減速操作やステアリング操作といった減速等操作があったか否かを判断する(S6)。減速等操作の有無は、ステアリングセンサ8から送信されるステアリング情報、ブレーキペダルセンサ9から送信されるブレーキ操作量情報、アクセルペダルセンサ10から送信されるアクセル操作量情報に基づいて判断される。
【0054】
その結果、減速等操作があったと判断した場合には、減速等操作位置学習部26において、距離補正部25から出力される補正残距離信号に基づいて、減速等操作が行われた位置を取得する。それから、学習情報DB11に記憶されている学習データを参照し、減速等操作が行われた位置が、減速等操作開始位置から一定の範囲内にあるか否かを判断する(S7)。ここでの一定の範囲は適宜決定されており、たとえば半径5m以内であったり、半径10m以内であったりすることができる。また、他の範囲とすることもできる。
【0055】
その結果、減速等操作が行われた位置が、減速等操作開始位置から一定の範囲内にあると判断した場合には、減速等操作の内容および減速等操作が行われた位置を減速等操作開始位置に対応付けて学習する(S8)。学習した減速等操作は、学習情報として学習情報DB11に書き込んで記憶させる。このときの減速等操作の内容としては、減速等操作を行った位置のほか、減速操作をした場合の減速度やステアリング操作をした場合の操舵角等を学習する。
【0056】
それから、減速等操作が終了した後に車両が加速したか否かを判断する(S10)。この判断は、車速センサ6から送信される車速情報に基づいて行われる。その結果、加速操作が行われていない場合には、ステップS6に戻って同様の操作を繰り返す。一方、加速操作が行われた場合には、そのまま処理を終了する。
【0057】
また、ステップS6において減速等操作がなかったと判断した場合には、そのままステップS10に進んで、減速等操作が終了した後に車両が加速したか否かを判断する(S10)。車両の加速があったか否かの判断は、たとえばブレーキがOFFとなった後に、アクセルペダルの踏み込み量が所定値以上となったか否か、あるいは減速後の車速変化が所定の速度変化以上となったか否かによって行うことができる。車両が加速したか否かの判断に代えて、ステアリングが所定角度以上操舵されたか否かの判断や走行距離が所定距離以上となったか否かの判断を行うこともできる。あるいはこれらの判断を複合的に行うこともできる。さらに、ステップS7において、減速等操作があった位置が、減速等操作開始位置から一定の範囲内にないと判断した場合には、学習を行うことなく(S9)、処理を終了する。
【0058】
他方、ステップS5において、対象交差点についての学習データ数が所定のしきい値を超えていないと判断した場合には、減速等操作があったか否かを判断する(S11)。この判断は、ステップS6における判断と同様にして行われる。その結果、減速等操作があった場合には、減速等操作を学習する(S12)。ここでは、減速等操作が行われた位置を減速等操作開始位置として設定し、設定した減速等操作開始位置に対応付けて減速等操作を学習する。
【0059】
その後、車両が加速したか否かを判断する(S13)。また、ステップS11において減速等操作がないと判断した場合にも、車両が加速したか否かを判断する(S13)。その結果、加速操作が行われていない場合には、ステップS11に戻って同様の操作を繰り返す。一方、加速操作が行われた場合には、そのまま処理を終了する。
【0060】
このように、本実施形態に係る車両用情報処理装置においては、対象交差点に近い範囲内において減速等操作が行われた場合に、減速等操作が行われた位置である減速等操作開始位置を対象交差点との離間距離に対応付けて学習している。そして、この学習情報が学習情報DB11に記憶されている。このため、対象交差点におけるドライバの意図に応じた減速等操作開始位置を学習に反映させることができるので、対象交差点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【0061】
したがって、たとえば減速等操作開始位置情報提供部27からブレーキアクチュエータ12に減速操作開始情報を送信して制動制御を行う場合に、学習情報DB11に記憶された学習情報を参照するので、ドライバの運転嗜好に応じたタイミングで制動制御を行うことができる。さらには、ステアリング操作開始情報を送信してステアリング操作を促す場合にも、ドライバの運転嗜好に応じたタイミングステアリング操作を促すことができる。
【0062】
ナビゲーション装置2から送信される距離情報は、精度が高くないが、対象交差点までの距離が遠い場合に、対象交差点とのおおよその距離を把握することができる。一方、ミリ波レーダ4や車載カメラ5によって距離を検出する場合、検出精度は高いものの、距離検出の距離に限界があるので、対象交差点までの距離が遠いと、その距離を検出することができなくなる。この点、本実施形態に係る車両用情報処理装置においては、対象交差点までの距離を検出するにあたり、距離補正部25において、ナビゲーション装置2から送信される距離情報に基づいて暫定的に取得された対象交差点までの距離を、車速センサ6から送信される車速情報から算出された走行距離によって補正して対象交差点までの距離として算出している。このため、対象交差点におけるドライバの運転嗜好に応じた減速等操作開始位置をより精度よく決定することができる。
【0063】
上述したように、ナビゲーション装置2は、車両の現在位置と対象交差点までの距離が255m以上である場合には、255mの距離情報をECU1に送信し、車両の現在位置と対象交差点までの距離が255m未満の場合は、対象交差点までの距離を示す距離情報をECU1に送信する。このため、本実施形態に係る車両用情報処理装置においては、ナビゲーション装置2から送信される距離情報に基づいて取得された車両の現在位置と対象交差点までの残距離が255m以上の場合と255m未満の場合とで、車速センサ6から送信される車速情報から算出される距離情報の寄与率を変更している。
【0064】
ナビゲーション装置2から送信される距離情報に基づいて取得された車両の現在位置と対象交差点までの残距離が255m以上の場合は、車速センサ6から送信される車速情報から算出される距離情報の寄与率は0である。これに対して、ナビゲーション装置2から送信される距離情報に基づいて取得された車両の現在位置と対象交差点までの残距離が255m未満の場合は、車速センサ6から送信される車速情報から算出される距離情報の寄与率が0を超える一定の割合となっている。精度の低いナビゲーション装置2から情報を対象交差点の近傍において補正することができるので、さらに精度よくドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【0065】
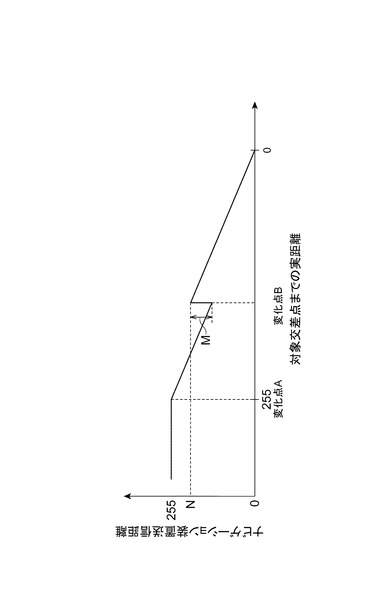
また、図3の処理においては、ナビゲーション装置2から送信される距離情報に基づいて、対象交差点までの残距離が変化したと判断した場合に、距離補正部25はその変化点を基準として車両の走行距離を算出している。具体的には、距離補正部25は対象交差点までの距離が255m未満になった地点を変化点Aとし、変化点Aから車両が走行した距離を算出している。対象交差点までの距離が255m未満になった後、通常はナビゲーション装置2から送信される距離情報が示す残距離は減少していくが、図4に示すように、一旦増加して再び減少することがある。たとえば、対象交差点までの距離が255m未満の地点に、他の交差点が存在する場合などのように対象交差点への経路が複数存在する場合に、車両が進む経路によっては、残距離が一旦増加して再び減少することがある。また、対象交差点の前にカーブが存在する場合にも、残距離が一旦増加して再び減少することがある。
【0066】
このような場合に、変化点Aから車両が走行した距離を算出し、255mから走行距離を減算して補正残距離を算出すると、誤差が大きくなる。そこで、かかる場合には、ナビゲーション装置2から送信される距離情報が示す残距離が一旦増加した地点を変化点Bとして、変化点Bから車両が走行した距離を算出するのが好ましい。そして、算出した走行距離をナビゲーション装置2から送信される変化点Bにおける距離情報が示す残距離から減算することによって車両から対象交差点までの残距離を補正残距離として算出するのが好ましい。
【0067】
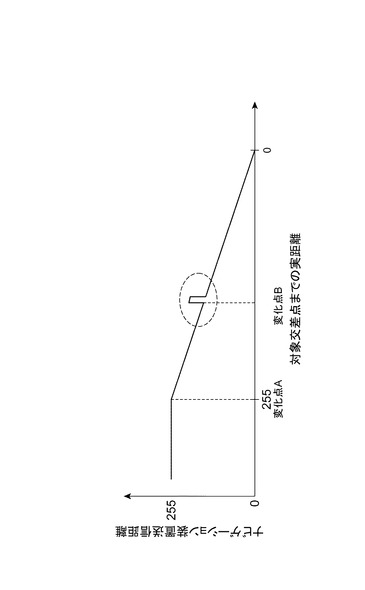
また、図5に示すように、ナビゲーション装置2から送信される距離情報が示す残距離が一旦増加した後、急激に減少することがある。これは、ナビゲーション装置2が、その地点において正確な残距離を検出できなかったことによるものである。したがって、このような場合には、変化点Bではなく変化点Aから車両が走行した距離を算出するのが好ましい。
【0068】
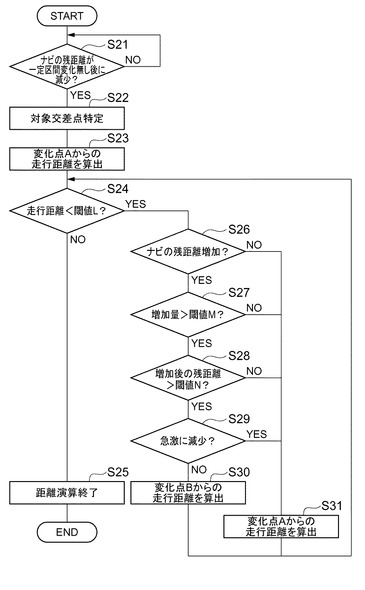
かかる場合を考慮した走行距離算出動作について説明する。図6は、本実施形態に係る車両用情報処理装置の処理手順を示すフローチャートである。この処理手順は、図3のステップS2〜ステップS4に代えて行われるものである。図6に示すように、まず、周辺情報検出部22は、ナビゲーション装置2から送信される距離情報に基づいて、対象交差点までの残距離の変化が無い区間を一定区間以上通過した後に、対象交差点までの残距離が減少したか否かを判断する(S21)。これは、対象交差点までの距離が255m未満の地点に車両が進入したか否かを判断することを意味する。
【0069】
ステップS21において、対象交差点までの残距離の変化が無い区間を一定区間以上通過した後に、対象交差点までの残距離が減少したと判断した場合には、対象交差点を特定する(S22)。対象交差点の特定は、残距離が255m未満となった交差点に対応するナビゲーション装置2から送信されるID情報を参照して特定することができる。一方で、ステップS21において、対象交差点までの残距離の変化が無い区間を一定区間以上通過した後に、対象交差点までの残距離が減少していないと判断した場合は、周辺情報検出部22はステップS21の判断を繰り返す。
【0070】
続いて、距離補正部25は、この残距離が減少した地点を変化点Aとして、変化点Aから車両が走行した距離を算出する(S23)。次に、距離補正部25は算出した走行距離が所定の第1閾値Lより小さいか否かを判断する(S24)。走行距離が第1閾値Lより小さいと判断した場合には、距離補正部25はナビゲーション装置2から送信される距離情報が示す対象交差点までの残距離が増加したか否かを判断する(S26)。残距離が増加したと判断した場合は、この残距離が増加した地点を変化点Bとし、距離補正部25はその増加量が所定の第2閾値Mより大きいか否かを判断する(S27)。
【0071】
増加量が第2閾値Mより大きいと判断した場合は、距離補正部25は増加後の残距離が所定の第3閾値Nより大きいか否かを判断する(S28)。増加後の残距離が第3閾値Nより大きいと判断した場合は、距離補正部25はナビゲーション装置2から送信される距離情報が示す対象交差点までの残距離が急激に減少したか否かを判断する(S29)。これは、ナビゲーション装置2から送信される距離情報が示す対象交差点までの残距離の増加が、ナビゲーション装置2が一時的に正確な残距離を検出できなかったことによるものか否かを判断することを意味する。
【0072】
S29において残距離が急激に減少していないと判断した場合は、距離補正部25は変化点Bから車両が走行した距離を算出する(S30)。そして、距離補正部25は算出した走行距離をナビゲーション装置2から送信される変化点Bにおける距離情報が示す残距離から減算することによって車両から対象交差点までの残距離を補正残距離として算出する。そして、ステップS24に戻って上記処理を繰り返す。
【0073】
一方で、ステップS26において残距離が増加していないと判断した場合、ステップS27において増加量が第2閾値M以下と判断した場合、ステップS28において増加後の残距離が第3閾値N以下と判断した場合、ステップS29において残距離が急激に減少したと判断した場合には、距離補正部25は変化点Aから車両が走行した距離を算出する(S31)。そして、距離補正部25は算出した走行距離を255mから減算することによって車両から対象交差点までの残距離を補正残距離として算出する。そして、ステップS24に戻って上記処理を繰り返す。ステップS24において、走行距離が第1閾値L以上と判断した場合には、これ以上走行距離が大きくなると誤差が大きくなると考えられる。従って走行距離の算出を終了して(S25)、図3のステップS5へ進む。
【0074】
上記処理において、ステップS27において残距離の増加量が第2閾値Mより大きいと判断し、かつ、ステップS28において増加後の残距離が第3閾値Nより大きいと判断した場合に、距離補正部25は変化点Bから車両が走行した距離を算出しているが、ステップS27において残距離の増加量が第2閾値Mより大きいと判断したか、あるいは、ステップS28において増加後の残距離が第3閾値Nより大きいと判断した場合に、変化点Bから車両が走行した距離を算出するようにしてもよい。
【0075】
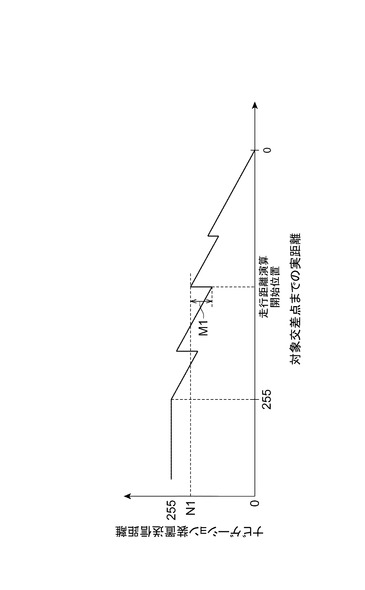
ところで、連続したカーブ路などでは、変化点が連続して存在することがある。その場合、図7に示すように、ステップS27における第2閾値M、ステップS28における第3閾値Nを変更するようにしてもよい。具体的には、距離補正部25は変化点A以降で所定回数の変化点を検出すると、連続カーブが存在するものと判断する。そして、ステップS27における閾値を第2閾値Mより小さい修正第2閾値M1に変更し、ステップS28における閾値を第3閾値Nより小さい修正第3閾値N1に変更する。あるいは、ステップ27かステップS28のいずれか一方の判断のみを行うように変更するようにしてもよい。
【0076】
また、連続したカーブ路などで変化点が連続して存在する場合、走行挙動を考慮して走行距離の演算開始位置を決定するようにしてもよい。たとえば、ステップS27、ステップS28に加えて、変化点が最も減速度が強い減速挙動から手前Xm以内であるか否かを判断し、Xm以内と判断した場合、距離補正部25はその変化点から車両が走行した距離を算出するようにしてもよい。あるいは、ステップS27、ステップS28に代えて、上記処理を行うようにしてもよい。
【0077】
このように、本実施形態に係る車両用情報処理装置において、精度の低いナビゲーション装置2からの情報を対象交差点の近傍において補正することができるので、さらに精度よくドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【0078】
以上、本発明の好適な実施形態について説明したが、本発明は上記実施形態に限定されるものではない。たとえば、上記実施形態においては、対象交差点の手前の位置において行われたステアリング操作の内容によって学習態様を変更することができる。たとえば、対象交差点の手前位置において、学習情報DB11に記憶されたステアリング操作と異なるステアリング操作があった場合、以後の学習を行わないようにすることもできる。
【0079】
この場合、図8に示すように、減速等操作開始位置P0から対象交差点PFの間において、第1位置P1でアクセルをOFFにする操作があり、第2位置P2でステアリング操作があったとする。また、第3位置P3でブレーキON操作があり、第4位置P4でブレーキOFF操作があったとする。この場合、第2位置P2におけるステアリング操作が学習情報DB11に記憶されていたステアリング操作と異なる操作である場合には、このときのステアリング操作は、通常行われない操作である可能性が高いと考えられる。
【0080】
したがって、第1位置P1におけるアクセル操作は学習するが、第3位置P3におけるブレーキ操作および第4位置P4におけるブレーキ操作の学習は中止するようにする。このような学習を行うことにより、通常行われない操作に基づく操作を学習対象から外すことができるので、ドライバの運転嗜好により応じた学習を行うことができる。
【0081】
ここでの通常行われない操作としてのステアリング操作としては、たとえば、ステアリング操作があった位置と、学習情報DB11に記憶されているステアリング操作があった位置とのずれが所定値以上である場合のステアリング操作が相当する。また、操作ステアリング量ずれが一定値以上である場合、車線変更回数が所定値以上である場合、右折専用レーンがない場合にステアリング操作があった場合、周辺車両が一定の距離以内にいるときにステアリング操作があった場合などを挙げることができる。
【0082】
また、上記実施形態では、対象交差点までの距離を補正するにあたり、車速を用いて補正を行っていたが、対象交差点と車両との距離を検出して検出した距離を補正残距離とすることもできる。この場合、車両と対象交差点との距離を直接検出することもできるし、標識や看板等の対象交差点の近傍における物標を車載カメラ5で検出し、検出した物標と対象交差点との距離から、車両から対象交差点までの残距離を検出することもできる。
【符号の説明】
【0083】
1…情報処理ECU、2…ナビゲーション装置、3…インフラ通信装置、4…ミリ波レーダ、5…車載カメラ、6…車速センサ、7…ACC・PCSスイッチ、8…ステアリングセンサ、9…ブレーキペダルセンサ、10…アクセルペダルセンサ、11…学習情報DB、12…ブレーキアクチュエータ、13…アクセルアクチュエータ、14…スピーカ、15…ディスプレイ、21…車両位置検出部、22…周辺情報検出部、23…走行状態検出部、24…減速等操作検出部、25…距離補正部、26…減速等操作位置学習部、27…減速等操作開始位置情報提供部。
【技術分野】
【0001】
本発明は、車両用情報処理装置に係り、特に、交差点などの車両が減速を要する要減速地点における車両の操作を学習する車両用情報処理装置に関する。
【背景技術】
【0002】
車両の制御を行うにあたり、交差点などの車両の減速が必要となる要減速地点において、ドライバに対してブレーキ操作を促す車両用運転支援装置が開示されている(たとえば、特許文献1参照)。この車両用運転支援装置は、要減速地点を地図データベースに記憶しておき、要減速地点の所定距離手前の地点において、ドライバに対してブレーキ操作を誘導するというものである。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2007−221889号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記特許文献1に開示された車両用運転支援装置においては、ドライバの意図とは無関係にブレーキ操作の誘導を開始する誘導開始地点を決定するようにしていた。このため、ドライバの運転嗜好に応じたブレーキ操作の誘導開始地点(減速等操作開始位置)を決定することができなかった。したがって、たとえば制動制御を行って、ブレーキ操作を開始するとしても、ドライバの嗜好に応じた位置で制動制御を開始することができず、あるいはドライバに運転操作を促進するとしても、適切な促進開始位置を決定することができないという問題があった。
【0005】
そこで、本発明の課題は、要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる車両用情報処理装置を提供することにある。
【課題を解決するための手段】
【0006】
上記課題を解決した本発明に係る車両用情報処理装置は要減速地点の地図情報を記憶する地図情報記憶手段と、車両の位置を検出する車両位置検出手段と、車両の減速等操作を検出する減速等操作検出手段と、要減速地点の手前位置であって、減速等操作が行われた位置を学習する減速等操作位置学習手段と、を備え、減速等操作位置学習手段は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習することを特徴とする。
【0007】
本発明に係る車両用情報処理装置は、減速等操作位置学習手段は、減速等操作が行われた位置の要減速地点からの離間距離に対応付けて、減速等操作を学習している。このため、要減速地点におけるドライバの意図に応じた減速等操作開始位置を学習に反映させることができる。したがって、要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【0008】
なお、本発明における「要減速地点」とは、車両の減速が要求される位置であり、たとえば交差点、カーブ路の進入点、踏切などを挙げることができる。また、「減速等操作」とは、要減速地点においてドライバが行うと想定される操作であり、代表的には減速操作があり、その他ステアリング操作などを挙げることができる。さらに、「減速等操作開始位置」とは、要減速地点の手前位置であって、減速等操作を開始する地点である。
【0009】
ここで、車両の周辺情報を検出する周辺情報検出手段と、車両の走行状態を検出する走行状態検出手段と、車両における要減速地点までの距離を補正する距離補正手段と、を備え、距離補正手段は、周辺情報検出手段で検出された周辺情報に基づいて算出される車両から要減速地点までの距離を、走行状態検出手段で検出された走行状態に基づいて補正する態様とすることができる。
【0010】
車両の周辺情報を検出する周辺情報検出手段では、要減速地点までの距離の検出精度が低くなってしまう。そこで、周辺情報検出手段で検出された周辺情報に基づいて算出される車両から要減速地点までの距離を、走行距離検出手段で検出された走行距離に基づいて補正している。走行距離検出手段では、要減速地点までの距離を高い精度で検出することができるので、要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置をより精度よく決定することができる。したがって、より精度よくドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【0011】
また、車両から要減速地点までの距離が所定距離以下となった場合に、距離補正手段によって車両から要減速地点までの距離を算出する際の走行距離検出手段で検出された走行距離の寄与率を大きくする態様とすることができる。
【0012】
このように、車両から要減速地点までの距離が所定距離以下となった場合に、距離補正手段によって車両から要減速地点までの距離を算出する際の走行距離検出手段で検出された走行距離の寄与率を大きくすることにより、さらに精度よくドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【0013】
また、周辺情報検出手段で検出された周辺情報に基づいて算出される車両から要減速地点までの距離が所定距離以下となった後、車両から要減速地点までの距離が所定距離以上増加した場合に、増加した地点での周辺情報検出手段で検出された周辺情報に基づいて算出される車両から要減速地点までの距離を、走行状態検出手段で検出された走行状態に基づいて補正する態様とすることができる。
【0014】
車両が進む経路によっては、車両から要減速地点までの距離が所定距離以下となった後、車両から要減速地点までの距離が増加する場合がある。そこで、増加した地点での周辺情報検出手段で検出された周辺情報に基づいて算出される車両から要減速地点までの距離を、走行状態検出手段で検出された走行状態に基づいて補正することにより、さらに精度よくドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【発明の効果】
【0015】
本発明に係る車両用情報処理装置によれば、要減速地点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態に係る車両用情報処理装置のブロック構成図である。
【図2】車両から対象交差点までの実際の距離と、ナビゲーション装置から送信される距離との関係を示すグラフである。
【図3】車両用情報処理装置の処理手順を示すフローチャートである。
【図4】車両から対象交差点までの実際の距離と、ナビゲーション装置から送信される距離との関係を示すグラフである。
【図5】車両から対象交差点までの実際の距離と、ナビゲーション装置から送信される距離との関係を示すグラフである。
【図6】距離補正部の処理手順を示すフローチャートである。
【図7】カーブが連続して存在する場合の車両から対象交差点までの実際の距離と、ナビゲーション装置から送信される距離との関係を示すグラフである。
【図8】減速等操作を行った位置を示す図である。
【発明を実施するための形態】
【0017】
以下、添付図面を参照して本発明の実施形態について説明する。なお、図面の説明において同一の要素には同一の符号を付し、重複する説明を省略する。また、図示の便宜上、図面の寸法比率は説明のものと必ずしも一致しない。
【0018】
図1は、本発明の実施形態に係る車両用情報処理装置のブロック構成図である。図1に示すように、本実施形態に係る車両用情報処理装置は、情報処理ECU1を備えている。情報処理ECU(Electric Control Unit)1には、ナビゲーション装置2、インフラ通信装置3、ミリ波レーダ4、車載カメラ5、および車速センサ6が接続されている。
【0019】
また、情報処理ECU1には、アダプティブクルーズコントロール(Adaptive Cruise Control、以下「ACC」という)・プリクラッシュセーフティシステム(Pre-Crash Safety system、以下「PCS」という)スイッチ7、ステアリングセンサ8、ブレーキペダルセンサ9、およびアクセルペダルセンサ10が接続されている。さらに、情報処理ECU1には、学習情報データベース(以下「DB」という)11、ブレーキアクチュエータ12、アクセルアクチュエータ13、スピーカ14、およびディスプレイ15が接続されている。
【0020】
また、情報処理ECU1には、車両位置検出部21、周辺情報検出部22、走行状態検出部23、および減速等操作検出部24が設けられている。さらに、情報処理ECU1には、距離補正部25、減速等操作位置学習部26、および減速等操作開始位置情報提供部27が設けられている。
【0021】
ナビゲーション装置2は、車両の現在位置や目的地までの経路情報を、運転者に提供するための装置である。また、ナビゲーション装置2は、車両が走行する道路に関する地図情報DBを備えており、車両が現在走行している正確な位置である現在位置を取得する。さらに、ナビゲーション装置2は、要減速地点であるたとえば交差点(以下「対象交差点」という)までの距離に関する距離情報を取得する。地図情報DBは、本発明の地図情報記憶手段を構成する。
【0022】
ナビゲーション装置2は、取得した車両が現在走行している位置に関する走行位置情報や車両の走行位置の近傍における地図情報を情報処理ECU1に送信する。また、ナビゲーション装置2は、車両が現在走行しているリンクのリンクIDや車両の進行方向に位置する対象交差点の交差点IDに関するID情報、さらには、対象交差点までの距離に関する距離情報などを情報処理ECU1に送信する。さらに、ナビゲーション装置2では、対象交差点などの対象交差点までの距離が所定の規定値より長い場合には、この規定値に応じた距離情報を情報処理ECU1に送信する。ナビゲーション装置2は、本発明の車両位置検出手段および周辺情報検出手段を構成する。
【0023】
たとえば、図2に示すように、所定の規定値が255mである場合には、対象交差点までの距離が255m以上である場合には、対象交差点までの距離が255mである距離情報を情報処理ECU1に送信する。また、対象交差点までの距離が255m未満となった場合に、対象交差点までの距離を示す距離情報を情報処理ECU1に送信する。
【0024】
インフラ通信装置3は、主要道路などに設けられた路側装置や基地局との間で双方向通信を行う通信装置である。インフラ通信装置3は、路側装置や基地局との間における双方向通信によってたとえば対象交差点までの距離に関する距離情報を取得する。インフラ通信装置3は、路側装置や基地局から取得した距離情報を情報処理ECU1に送信する。
【0025】
ミリ波レーダ4は、ミリ波を利用して前方の物体を検出するレーダである。ミリ波レーダ4は、自動車の前面の中央に取り付けられる。ミリ波レーダ4では、ミリ波を自車両から前方に向けて出射し、対象交差点に設けられた信号機などから反射してきたミリ波を受信する。そして、ミリ波レーダ4では、出射から受信までの時間を計測することによって自車両から対象交差点までの距離を算出する。ミリ波レーダ4は、算出した自車両から交差点までの距離に関する距離情報を情報処理ECU1に送信する。
【0026】
車載カメラ5は、たとえば車両前部に設けられており、車両が走行する道路の前方における路面や対象交差点における信号等を撮像する。車載カメラ5は、撮像した画像に基づいて自車両から対象交差点までの距離を算出する。車載カメラ5は、算出した自車両から対象交差点までの距離に関する距離情報を情報処理ECU1に送信する。
を路面画像情報として情報処理ECU1に送信するとともに、撮像した車両前方の画像を前方画像情報として情報処理ECU1に送信する。
【0027】
車速センサ6は、たとえば車両の車輪部に設けられ、車輪の回転数を検出しており、検出した車輪の回転数から走行状態としての車速を算出している。車速センサ6は、算出した車速に基づく車速情報を情報処理ECU1に送信する。車速センサ6は、本発明の走行状態検出手段を構成する。
【0028】
ACC・PCSスイッチ7は、たとえば自車両のステアリングに設けられており、ドライバの操作によって、ACCを行うか否かについてのON−OFFが可能とされている。また、ドライバの操作によって、PCSを行うか否かについてのON−OFFが可能とされている。ACC・PCSスイッチ7は、ACCがONとなっているか否かに関するACCON−OFF情報、PCSがONとなっているか否かに関するPCSON−OFF情報を情報処理ECU1に送信する。
【0029】
ステアリングセンサ8は、たとえばステアリングに連結されたステアリングシャフトに取り付けられており、ステアリングを操作した場合におけるステアリングの操舵角を検出する。ステアリングセンサ8は、検出したステアリングの操舵角に基づくステアリング情報を情報処理ECU1に送信する。
【0030】
ブレーキペダルセンサ9は、たとえばブレーキペダルに設けられており、ブレーキペダルのストローク量を検出している。ブレーキペダルセンサ9は、検出したブレーキペダルのストローク量をブレーキ操作量情報として情報処理ECU1に送信する。アクセルペダルセンサ10は、たとえばアクセルペダルに設けられており、アクセルペダルのストローク量を検出している。アクセルペダルセンサ10は、検出したアクセルペダルのストローク量をアクセル操作量情報として情報処理ECU1に送信する。ステアリングセンサ8、ブレーキペダルセンサ9、アクセルペダルセンサ10は、本発明の減速等操作検出手段を構成する。
【0031】
学習情報DB11は、情報処理ECU1において学習された学習情報を対象交差点ごとに記憶している。学習情報DB11に記憶されている学習情報には、対象交差点から所定の範囲内における減速操作やステアリング操作(以下、「減速等操作」という)を開始した位置(以下、「減速等操作開始位置」という)に関する情報および減速等操作の内容に関する情報が含まれる。この学習情報としては、減速等操作開始位置における対象交差点からの離間距離に対応付けられた減速等操作の内容に関する情報が含まれる。学習情報DB11は、情報処理ECU1における周辺情報検出部22や減速等操作開始位置情報提供部27の読み出しに応じて、記憶している学習情報を情報処理ECU1に送信する。
【0032】
情報処理ECU1における車両位置検出部21は、ナビゲーション装置2から送信される走行位置情報および地図情報を取得し、取得した走行位置情報に基づいて、車両の現在位置を取得する。車両位置検出部21は、取得した車両の現在位置に関する現在位置信号を地図情報に基づく地図信号とともに周辺情報検出部22に出力する。
【0033】
周辺情報検出部22は、ナビゲーション装置2やインフラ通信装置3から送信されるID情報や距離情報、さらには車両位置検出部21から出力された現在位置信号および地図信号に基づいて、車両から対象交差点までの残距離を暫定的に取得する。対象交差点については、ナビゲーション装置2から送信されるID情報に基づいて判断する。
【0034】
ここで、ナビゲーション装置2やインフラ通信装置3から送信される距離情報が異なる場合には、どちらかを優先して採用することもできるし、これらを平均等の算術処理した値を採用することもできる。周辺情報検出部22は、取得した車両から対象交差点までの距離に基づく暫定残距離信号を地図信号とともに距離補正部25に出力する。
【0035】
走行状態検出部23は、ミリ波レーダ4や車載カメラ5から送信される距離情報に基づいて、対象交差点の近傍に到達し、対象交差点までの距離を検出できる場合に車両から対象交差点までの距離を検出する。あるいは、車速センサ6から送信される車速情報に基づいて、車両の走行距離を算出する。走行状態検出部23は、検出した対象交差点までの残距離を残距離信号として距離補正部25に出力し、車両の走行距離を走行距離信号として距離補正部25に出力する。
【0036】
減速等操作検出部24は、ブレーキペダルセンサ9から送信されるブレーキペダル情報やアクセルペダルセンサ10から送信されるアクセルペダル情報に基づいて、車両の減速操作を検出する。具体的に、ブレーキペダルの踏み込み量が大きくなったり、アクセルペダルの踏み込み量が小さくなったりした場合に、減速操作があったことを検出する。減速等操作を検出するにあたり、具体的には、アクセルペダルを戻す操作やブレーキペダルを踏み込む操作があったときに減速操作を検出し、ステアリングの切角が所定角度以上と成ったときにステアリング操作を検出することができる。
【0037】
さらに、減速等操作検出部24は、ステアリングセンサ8から送信されるステアリング情報に基づいて、車両のステアリング操作を検出する。減速等操作検出部24は、減速操作やステアリング操作といった減速等操作を検出した場合に、減速等操作信号を減速等操作位置学習部26に出力する。
【0038】
距離補正部25は、周辺情報検出部22から出力された暫定残距離信号について、走行状態検出部23から出力された走行距離信号を用いて補正し、補正残距離を算出する。あるいは、走行状態検出部23から残距離信号が出力された場合には、暫定算距離信号に代えて残距離信号に応じた残距離を補正残距離とする。
【0039】
このように、距離補正部25は、走行状態検出部23から出力された走行距離信号や残距離信号を用いて補正を行うことにより、車両から対象交差点までの距離を求める際に、車速情報から算出される走行距離の寄与率を大きくするようにしている。距離補正部25は、算出した補正残距離に基づく補正残距離信号を地図情報とともに減速等操作位置学習部26に出力する。情報処理ECU1は、本発明の距離補正手段を構成する。
【0040】
減速等操作位置学習部26は、減速等操作検出部24から出力された減速等操作信号、距離補正部25から出力された補正残距離信号および地図情報に基づいて、車両が減速等操作を開始した位置である減速等操作開始位置を取得する。減速等操作位置学習部26は、この減速等操作開始位置の対象交差点に対する位置を学習し、学習した減速等操作開始位置を対象交差点に対応付けて学習情報DB11に記憶させる。情報処理ECU1は、本発明の減速等操作位置学習手段を構成する。
【0041】
減速等操作開始位置情報提供部27は、ナビゲーション装置2から送信される地図情報または距離補正部25から出力される補正算距離信号に基づいて、車両における対象交差点までの距離を取得する。減速等操作開始位置情報提供部27は、車両における対象交差点までの距離を取得した際、この対象交差点における学習情報を学習情報DB11から読み出す。
【0042】
減速等操作開始位置情報提供部27は、車両における対象交差点に対する位置が、学習情報DB11から読み出した減速等操作開始位置となっている場合に、ブレーキアクチュエータ12、アクセルアクチュエータ13、スピーカ14、およびディスプレイ15に減速操作開始情報を送信する。さらには、ステアリング操作開始情報をスピーカ14、およびディスプレイ15に減速操作開始情報を送信する。
【0043】
ブレーキアクチュエータ12は、情報処理ECU1における減速等操作開始位置情報提供部27から減速操作開始情報が送信された場合に、ブレーキを作動させて車両を減速させる。アクセルアクチュエータ13は、情報処理ECU1における減速等操作開始位置情報提供部27から減速操作開始情報が送信された場合に、アクセル開度を緩めて車両を減速させる。
【0044】
また、スピーカ14は、情報処理ECU1における減速等操作開始位置情報提供部27から減速操作開始情報が送信された場合に、車両が減速を開始することを報知する減速開始音を出力する。さらに、減速等操作開始位置情報提供部27からステアリング操作開始情報が送信された場合に、ドライバにステアリング操作を促すステアリング操作開始促進音を出力する。
【0045】
ディスプレイ15は、情報処理ECU1における減速等操作開始位置情報提供部27から減速操作開始情報が送信された場合に、車両が減速を開始することを報知する減速開始情報を表示する。減速等操作開始位置情報提供部27からステアリング操作開始情報が送信された場合に、ドライバにステアリング操作を促すステアリング操作開始情報を表示する。
【0046】
続いて、本実施形態に係る車両用情報処理装置における動作について説明する。図3は、本実施形態に係る車両用情報処理装置の処理手順を示すフローチャートである。図3に示すように、本実施形態に係る車両用情報処理装置においては、まず、車両位置検出部21において、ナビゲーション装置2から送信される走行位置情報に基づいて車両の位置を検出する(S1)。
【0047】
次に、周辺情報検出部22において、車両位置検出部21から出力される現在位置信号およびナビゲーション装置2から送信される距離情報に基づいて、対象交差点までの残距離を取得し、対象交差点までの残距離が変化したか否かを判断する(S2)。ここで、ナビゲーション装置2では、図2に示すように、車両の現在位置と対象交差点までの残距離を算出し、算出した距離が所定のしきい値、たとえば255m以上である場合には、距離情報として対象交差点までの距離が255mとなる距離情報を送信する。
【0048】
このため、周辺情報検出部22では、車両から対象交差点までの残距離が255m以上と遠い場合には、対象交差点までの残距離は変化しないと判断し、ステップS2の処理を繰り返す。一方、車両から対象交差点までの残距離が255mとなった場合には、ナビゲーション装置2から送信される距離情報に基づく対象交差点までの残距離が短くなる。このため、周辺情報検出部22においては、対象交差点までの残距離が変化したと判断することとなる。
【0049】
周辺情報検出部22において、対象交差点までの残距離が変化したと判断した場合には、対象交差点を特定する(S3)。対象交差点の特定は、残距離が255m未満となった交差点に対応するナビゲーション装置2から送信されるID情報を参照して特定することができる。
【0050】
続いて、距離補正部25において、車両から対象交差点までの残距離が255mとなった地点から車両が走行した距離を算出する(S4)。ここでの車両が走行した距離は、走行状態検出部23から出力される車速センサ6から送信された車速情報に基づく車速を積分することによって求めることができる。あるいは、ミリ波レーダ4から送信された距離情報や車載カメラ5から送信された距離情報を用いることもできる。
【0051】
距離補正部25では、ステップS2で取得した残距離およびステップS4で算出した走行距離に応じた走行距離信号に基づいて、車両から対象交差点までの距離を補正する。具体的には、車両が対象交差点から255mの位置に到達した後、車両が走行した走行距離を255mから減算することによって車両から対象交差点までの残距離を補正残距離として算出する。
【0052】
続いて、学習情報DB11に記憶されている学習データのうち、ここでの対象交差点についての学習データ数が所定のしきい値を超えているか否かを判断する(S5)。所定のしきい値は適宜設定されており、たとえば5回や10回、あるいはその他の回数とすることができる。
【0053】
このとき、対象交差点についての学習データ数が所定のしきい値を超えていると判断した場合には、減速操作やステアリング操作といった減速等操作があったか否かを判断する(S6)。減速等操作の有無は、ステアリングセンサ8から送信されるステアリング情報、ブレーキペダルセンサ9から送信されるブレーキ操作量情報、アクセルペダルセンサ10から送信されるアクセル操作量情報に基づいて判断される。
【0054】
その結果、減速等操作があったと判断した場合には、減速等操作位置学習部26において、距離補正部25から出力される補正残距離信号に基づいて、減速等操作が行われた位置を取得する。それから、学習情報DB11に記憶されている学習データを参照し、減速等操作が行われた位置が、減速等操作開始位置から一定の範囲内にあるか否かを判断する(S7)。ここでの一定の範囲は適宜決定されており、たとえば半径5m以内であったり、半径10m以内であったりすることができる。また、他の範囲とすることもできる。
【0055】
その結果、減速等操作が行われた位置が、減速等操作開始位置から一定の範囲内にあると判断した場合には、減速等操作の内容および減速等操作が行われた位置を減速等操作開始位置に対応付けて学習する(S8)。学習した減速等操作は、学習情報として学習情報DB11に書き込んで記憶させる。このときの減速等操作の内容としては、減速等操作を行った位置のほか、減速操作をした場合の減速度やステアリング操作をした場合の操舵角等を学習する。
【0056】
それから、減速等操作が終了した後に車両が加速したか否かを判断する(S10)。この判断は、車速センサ6から送信される車速情報に基づいて行われる。その結果、加速操作が行われていない場合には、ステップS6に戻って同様の操作を繰り返す。一方、加速操作が行われた場合には、そのまま処理を終了する。
【0057】
また、ステップS6において減速等操作がなかったと判断した場合には、そのままステップS10に進んで、減速等操作が終了した後に車両が加速したか否かを判断する(S10)。車両の加速があったか否かの判断は、たとえばブレーキがOFFとなった後に、アクセルペダルの踏み込み量が所定値以上となったか否か、あるいは減速後の車速変化が所定の速度変化以上となったか否かによって行うことができる。車両が加速したか否かの判断に代えて、ステアリングが所定角度以上操舵されたか否かの判断や走行距離が所定距離以上となったか否かの判断を行うこともできる。あるいはこれらの判断を複合的に行うこともできる。さらに、ステップS7において、減速等操作があった位置が、減速等操作開始位置から一定の範囲内にないと判断した場合には、学習を行うことなく(S9)、処理を終了する。
【0058】
他方、ステップS5において、対象交差点についての学習データ数が所定のしきい値を超えていないと判断した場合には、減速等操作があったか否かを判断する(S11)。この判断は、ステップS6における判断と同様にして行われる。その結果、減速等操作があった場合には、減速等操作を学習する(S12)。ここでは、減速等操作が行われた位置を減速等操作開始位置として設定し、設定した減速等操作開始位置に対応付けて減速等操作を学習する。
【0059】
その後、車両が加速したか否かを判断する(S13)。また、ステップS11において減速等操作がないと判断した場合にも、車両が加速したか否かを判断する(S13)。その結果、加速操作が行われていない場合には、ステップS11に戻って同様の操作を繰り返す。一方、加速操作が行われた場合には、そのまま処理を終了する。
【0060】
このように、本実施形態に係る車両用情報処理装置においては、対象交差点に近い範囲内において減速等操作が行われた場合に、減速等操作が行われた位置である減速等操作開始位置を対象交差点との離間距離に対応付けて学習している。そして、この学習情報が学習情報DB11に記憶されている。このため、対象交差点におけるドライバの意図に応じた減速等操作開始位置を学習に反映させることができるので、対象交差点におけるドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【0061】
したがって、たとえば減速等操作開始位置情報提供部27からブレーキアクチュエータ12に減速操作開始情報を送信して制動制御を行う場合に、学習情報DB11に記憶された学習情報を参照するので、ドライバの運転嗜好に応じたタイミングで制動制御を行うことができる。さらには、ステアリング操作開始情報を送信してステアリング操作を促す場合にも、ドライバの運転嗜好に応じたタイミングステアリング操作を促すことができる。
【0062】
ナビゲーション装置2から送信される距離情報は、精度が高くないが、対象交差点までの距離が遠い場合に、対象交差点とのおおよその距離を把握することができる。一方、ミリ波レーダ4や車載カメラ5によって距離を検出する場合、検出精度は高いものの、距離検出の距離に限界があるので、対象交差点までの距離が遠いと、その距離を検出することができなくなる。この点、本実施形態に係る車両用情報処理装置においては、対象交差点までの距離を検出するにあたり、距離補正部25において、ナビゲーション装置2から送信される距離情報に基づいて暫定的に取得された対象交差点までの距離を、車速センサ6から送信される車速情報から算出された走行距離によって補正して対象交差点までの距離として算出している。このため、対象交差点におけるドライバの運転嗜好に応じた減速等操作開始位置をより精度よく決定することができる。
【0063】
上述したように、ナビゲーション装置2は、車両の現在位置と対象交差点までの距離が255m以上である場合には、255mの距離情報をECU1に送信し、車両の現在位置と対象交差点までの距離が255m未満の場合は、対象交差点までの距離を示す距離情報をECU1に送信する。このため、本実施形態に係る車両用情報処理装置においては、ナビゲーション装置2から送信される距離情報に基づいて取得された車両の現在位置と対象交差点までの残距離が255m以上の場合と255m未満の場合とで、車速センサ6から送信される車速情報から算出される距離情報の寄与率を変更している。
【0064】
ナビゲーション装置2から送信される距離情報に基づいて取得された車両の現在位置と対象交差点までの残距離が255m以上の場合は、車速センサ6から送信される車速情報から算出される距離情報の寄与率は0である。これに対して、ナビゲーション装置2から送信される距離情報に基づいて取得された車両の現在位置と対象交差点までの残距離が255m未満の場合は、車速センサ6から送信される車速情報から算出される距離情報の寄与率が0を超える一定の割合となっている。精度の低いナビゲーション装置2から情報を対象交差点の近傍において補正することができるので、さらに精度よくドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【0065】
また、図3の処理においては、ナビゲーション装置2から送信される距離情報に基づいて、対象交差点までの残距離が変化したと判断した場合に、距離補正部25はその変化点を基準として車両の走行距離を算出している。具体的には、距離補正部25は対象交差点までの距離が255m未満になった地点を変化点Aとし、変化点Aから車両が走行した距離を算出している。対象交差点までの距離が255m未満になった後、通常はナビゲーション装置2から送信される距離情報が示す残距離は減少していくが、図4に示すように、一旦増加して再び減少することがある。たとえば、対象交差点までの距離が255m未満の地点に、他の交差点が存在する場合などのように対象交差点への経路が複数存在する場合に、車両が進む経路によっては、残距離が一旦増加して再び減少することがある。また、対象交差点の前にカーブが存在する場合にも、残距離が一旦増加して再び減少することがある。
【0066】
このような場合に、変化点Aから車両が走行した距離を算出し、255mから走行距離を減算して補正残距離を算出すると、誤差が大きくなる。そこで、かかる場合には、ナビゲーション装置2から送信される距離情報が示す残距離が一旦増加した地点を変化点Bとして、変化点Bから車両が走行した距離を算出するのが好ましい。そして、算出した走行距離をナビゲーション装置2から送信される変化点Bにおける距離情報が示す残距離から減算することによって車両から対象交差点までの残距離を補正残距離として算出するのが好ましい。
【0067】
また、図5に示すように、ナビゲーション装置2から送信される距離情報が示す残距離が一旦増加した後、急激に減少することがある。これは、ナビゲーション装置2が、その地点において正確な残距離を検出できなかったことによるものである。したがって、このような場合には、変化点Bではなく変化点Aから車両が走行した距離を算出するのが好ましい。
【0068】
かかる場合を考慮した走行距離算出動作について説明する。図6は、本実施形態に係る車両用情報処理装置の処理手順を示すフローチャートである。この処理手順は、図3のステップS2〜ステップS4に代えて行われるものである。図6に示すように、まず、周辺情報検出部22は、ナビゲーション装置2から送信される距離情報に基づいて、対象交差点までの残距離の変化が無い区間を一定区間以上通過した後に、対象交差点までの残距離が減少したか否かを判断する(S21)。これは、対象交差点までの距離が255m未満の地点に車両が進入したか否かを判断することを意味する。
【0069】
ステップS21において、対象交差点までの残距離の変化が無い区間を一定区間以上通過した後に、対象交差点までの残距離が減少したと判断した場合には、対象交差点を特定する(S22)。対象交差点の特定は、残距離が255m未満となった交差点に対応するナビゲーション装置2から送信されるID情報を参照して特定することができる。一方で、ステップS21において、対象交差点までの残距離の変化が無い区間を一定区間以上通過した後に、対象交差点までの残距離が減少していないと判断した場合は、周辺情報検出部22はステップS21の判断を繰り返す。
【0070】
続いて、距離補正部25は、この残距離が減少した地点を変化点Aとして、変化点Aから車両が走行した距離を算出する(S23)。次に、距離補正部25は算出した走行距離が所定の第1閾値Lより小さいか否かを判断する(S24)。走行距離が第1閾値Lより小さいと判断した場合には、距離補正部25はナビゲーション装置2から送信される距離情報が示す対象交差点までの残距離が増加したか否かを判断する(S26)。残距離が増加したと判断した場合は、この残距離が増加した地点を変化点Bとし、距離補正部25はその増加量が所定の第2閾値Mより大きいか否かを判断する(S27)。
【0071】
増加量が第2閾値Mより大きいと判断した場合は、距離補正部25は増加後の残距離が所定の第3閾値Nより大きいか否かを判断する(S28)。増加後の残距離が第3閾値Nより大きいと判断した場合は、距離補正部25はナビゲーション装置2から送信される距離情報が示す対象交差点までの残距離が急激に減少したか否かを判断する(S29)。これは、ナビゲーション装置2から送信される距離情報が示す対象交差点までの残距離の増加が、ナビゲーション装置2が一時的に正確な残距離を検出できなかったことによるものか否かを判断することを意味する。
【0072】
S29において残距離が急激に減少していないと判断した場合は、距離補正部25は変化点Bから車両が走行した距離を算出する(S30)。そして、距離補正部25は算出した走行距離をナビゲーション装置2から送信される変化点Bにおける距離情報が示す残距離から減算することによって車両から対象交差点までの残距離を補正残距離として算出する。そして、ステップS24に戻って上記処理を繰り返す。
【0073】
一方で、ステップS26において残距離が増加していないと判断した場合、ステップS27において増加量が第2閾値M以下と判断した場合、ステップS28において増加後の残距離が第3閾値N以下と判断した場合、ステップS29において残距離が急激に減少したと判断した場合には、距離補正部25は変化点Aから車両が走行した距離を算出する(S31)。そして、距離補正部25は算出した走行距離を255mから減算することによって車両から対象交差点までの残距離を補正残距離として算出する。そして、ステップS24に戻って上記処理を繰り返す。ステップS24において、走行距離が第1閾値L以上と判断した場合には、これ以上走行距離が大きくなると誤差が大きくなると考えられる。従って走行距離の算出を終了して(S25)、図3のステップS5へ進む。
【0074】
上記処理において、ステップS27において残距離の増加量が第2閾値Mより大きいと判断し、かつ、ステップS28において増加後の残距離が第3閾値Nより大きいと判断した場合に、距離補正部25は変化点Bから車両が走行した距離を算出しているが、ステップS27において残距離の増加量が第2閾値Mより大きいと判断したか、あるいは、ステップS28において増加後の残距離が第3閾値Nより大きいと判断した場合に、変化点Bから車両が走行した距離を算出するようにしてもよい。
【0075】
ところで、連続したカーブ路などでは、変化点が連続して存在することがある。その場合、図7に示すように、ステップS27における第2閾値M、ステップS28における第3閾値Nを変更するようにしてもよい。具体的には、距離補正部25は変化点A以降で所定回数の変化点を検出すると、連続カーブが存在するものと判断する。そして、ステップS27における閾値を第2閾値Mより小さい修正第2閾値M1に変更し、ステップS28における閾値を第3閾値Nより小さい修正第3閾値N1に変更する。あるいは、ステップ27かステップS28のいずれか一方の判断のみを行うように変更するようにしてもよい。
【0076】
また、連続したカーブ路などで変化点が連続して存在する場合、走行挙動を考慮して走行距離の演算開始位置を決定するようにしてもよい。たとえば、ステップS27、ステップS28に加えて、変化点が最も減速度が強い減速挙動から手前Xm以内であるか否かを判断し、Xm以内と判断した場合、距離補正部25はその変化点から車両が走行した距離を算出するようにしてもよい。あるいは、ステップS27、ステップS28に代えて、上記処理を行うようにしてもよい。
【0077】
このように、本実施形態に係る車両用情報処理装置において、精度の低いナビゲーション装置2からの情報を対象交差点の近傍において補正することができるので、さらに精度よくドライバの運転嗜好に応じた減速等操作開始位置を決定することができる。
【0078】
以上、本発明の好適な実施形態について説明したが、本発明は上記実施形態に限定されるものではない。たとえば、上記実施形態においては、対象交差点の手前の位置において行われたステアリング操作の内容によって学習態様を変更することができる。たとえば、対象交差点の手前位置において、学習情報DB11に記憶されたステアリング操作と異なるステアリング操作があった場合、以後の学習を行わないようにすることもできる。
【0079】
この場合、図8に示すように、減速等操作開始位置P0から対象交差点PFの間において、第1位置P1でアクセルをOFFにする操作があり、第2位置P2でステアリング操作があったとする。また、第3位置P3でブレーキON操作があり、第4位置P4でブレーキOFF操作があったとする。この場合、第2位置P2におけるステアリング操作が学習情報DB11に記憶されていたステアリング操作と異なる操作である場合には、このときのステアリング操作は、通常行われない操作である可能性が高いと考えられる。
【0080】
したがって、第1位置P1におけるアクセル操作は学習するが、第3位置P3におけるブレーキ操作および第4位置P4におけるブレーキ操作の学習は中止するようにする。このような学習を行うことにより、通常行われない操作に基づく操作を学習対象から外すことができるので、ドライバの運転嗜好により応じた学習を行うことができる。
【0081】
ここでの通常行われない操作としてのステアリング操作としては、たとえば、ステアリング操作があった位置と、学習情報DB11に記憶されているステアリング操作があった位置とのずれが所定値以上である場合のステアリング操作が相当する。また、操作ステアリング量ずれが一定値以上である場合、車線変更回数が所定値以上である場合、右折専用レーンがない場合にステアリング操作があった場合、周辺車両が一定の距離以内にいるときにステアリング操作があった場合などを挙げることができる。
【0082】
また、上記実施形態では、対象交差点までの距離を補正するにあたり、車速を用いて補正を行っていたが、対象交差点と車両との距離を検出して検出した距離を補正残距離とすることもできる。この場合、車両と対象交差点との距離を直接検出することもできるし、標識や看板等の対象交差点の近傍における物標を車載カメラ5で検出し、検出した物標と対象交差点との距離から、車両から対象交差点までの残距離を検出することもできる。
【符号の説明】
【0083】
1…情報処理ECU、2…ナビゲーション装置、3…インフラ通信装置、4…ミリ波レーダ、5…車載カメラ、6…車速センサ、7…ACC・PCSスイッチ、8…ステアリングセンサ、9…ブレーキペダルセンサ、10…アクセルペダルセンサ、11…学習情報DB、12…ブレーキアクチュエータ、13…アクセルアクチュエータ、14…スピーカ、15…ディスプレイ、21…車両位置検出部、22…周辺情報検出部、23…走行状態検出部、24…減速等操作検出部、25…距離補正部、26…減速等操作位置学習部、27…減速等操作開始位置情報提供部。
【特許請求の範囲】
【請求項1】
要減速地点の地図情報を記憶する地図情報記憶手段と、
車両の位置を検出する車両位置検出手段と、
車両の減速等操作を検出する減速等操作検出手段と、
要減速地点の手前位置であって、前記減速等操作が行われた位置を学習する減速等操作位置学習手段と、を備え、
前記減速等操作位置学習手段は、前記減速等操作が行われた位置の前記要減速地点からの離間距離に対応付けて、前記減速等操作を学習することを特徴とする車両用情報処理装置。
【請求項2】
車両の周辺情報を検出する周辺情報検出手段と、
前記車両の走行状態を検出する走行状態検出手段と、
前記車両における前記要減速地点までの距離を補正する距離補正手段と、を備え、
前記距離補正手段は、前記周辺情報検出手段で検出された周辺情報に基づいて算出される前記車両から前記要減速地点までの距離を、前記走行状態検出手段で検出された走行状態に基づいて補正する請求項1に記載の車両用情報処理装置。
【請求項3】
前記距離補正手段は、前記車両から前記要減速地点までの距離が所定距離以下となった場合に、前記距離補正手段によって前記車両から前記要減速地点までの距離を算出する際の前記走行状態検出手段で検出された走行状態の寄与率を大きくする請求項2に記載の車両用情報処理装置。
【請求項4】
前記距離補正手段は、前記周辺情報検出手段で検出された周辺情報に基づいて算出される前記車両から前記要減速地点までの距離が所定距離以下となった後、前記車両から前記要減速地点までの距離が増加した場合に、前記増加した地点での前記周辺情報検出手段で検出された周辺情報に基づいて算出される前記車両から前記要減速地点までの距離を、前記走行状態検出手段で検出された走行状態に基づいて補正する請求項2に記載の車両用情報処理装置。
【請求項1】
要減速地点の地図情報を記憶する地図情報記憶手段と、
車両の位置を検出する車両位置検出手段と、
車両の減速等操作を検出する減速等操作検出手段と、
要減速地点の手前位置であって、前記減速等操作が行われた位置を学習する減速等操作位置学習手段と、を備え、
前記減速等操作位置学習手段は、前記減速等操作が行われた位置の前記要減速地点からの離間距離に対応付けて、前記減速等操作を学習することを特徴とする車両用情報処理装置。
【請求項2】
車両の周辺情報を検出する周辺情報検出手段と、
前記車両の走行状態を検出する走行状態検出手段と、
前記車両における前記要減速地点までの距離を補正する距離補正手段と、を備え、
前記距離補正手段は、前記周辺情報検出手段で検出された周辺情報に基づいて算出される前記車両から前記要減速地点までの距離を、前記走行状態検出手段で検出された走行状態に基づいて補正する請求項1に記載の車両用情報処理装置。
【請求項3】
前記距離補正手段は、前記車両から前記要減速地点までの距離が所定距離以下となった場合に、前記距離補正手段によって前記車両から前記要減速地点までの距離を算出する際の前記走行状態検出手段で検出された走行状態の寄与率を大きくする請求項2に記載の車両用情報処理装置。
【請求項4】
前記距離補正手段は、前記周辺情報検出手段で検出された周辺情報に基づいて算出される前記車両から前記要減速地点までの距離が所定距離以下となった後、前記車両から前記要減速地点までの距離が増加した場合に、前記増加した地点での前記周辺情報検出手段で検出された周辺情報に基づいて算出される前記車両から前記要減速地点までの距離を、前記走行状態検出手段で検出された走行状態に基づいて補正する請求項2に記載の車両用情報処理装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−43279(P2012−43279A)
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願番号】特願2010−185265(P2010−185265)
【出願日】平成22年8月20日(2010.8.20)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成24年3月1日(2012.3.1)
【国際特許分類】
【出願日】平成22年8月20日(2010.8.20)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]