
車両用情報表示装置
【課題】 車外の建物を運転者に安全かつ容易に認識させることが可能な車両用情報表示装置を提供することを目的とする。
【解決手段】 車両用ナビゲーション装置1は、車両Cに取り付けられ、運転者DRに対して建物BLを安全かつ容易に認識させるべく、ウインドシールド表示装置8によってウインドシールドWSに建物情報表示DIを表示する。建物情報表示DIは、例えば建物BLの名称を含み、運転者DRから見て建物BLの近傍となるウインドシールドWSの領域に表示される。これにより、運転者DRは、注視すべき方向から視線をそらさずに、建物BLの位置及びその情報(名称等)を容易に把握することができる。
【解決手段】 車両用ナビゲーション装置1は、車両Cに取り付けられ、運転者DRに対して建物BLを安全かつ容易に認識させるべく、ウインドシールド表示装置8によってウインドシールドWSに建物情報表示DIを表示する。建物情報表示DIは、例えば建物BLの名称を含み、運転者DRから見て建物BLの近傍となるウインドシールドWSの領域に表示される。これにより、運転者DRは、注視すべき方向から視線をそらさずに、建物BLの位置及びその情報(名称等)を容易に把握することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転者から見える建物の情報を表示する車両用情報表示装置に関する。
【背景技術】
【0002】
車両用ナビゲーション装置では、運転者に対して経路案内を行う場合に、目立つ建物(ランドマーク)を目印として案内する方法が用いられている。例えば、ダッシュボード付近に設置されたディスプレイ上の地図にランドマークを表示するとともに、該当するランドマークに近づいていることを音声で運転者に伝達することで案内を行う。
【0003】
【特許文献1】特開2004−037260号公報
【特許文献2】特開平7−257228号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、そのような案内(報知)の仕方は、運転者がランドマークを知っている場合は良いが、ランドマークを知らない場合には、まずディスプレイからランドマークの位置と特徴を短時間で認識し、その後ランドマークを車外の景色から探し出すことが必要となる。この動作は、運転者の視線を色々な方向に移動させることになるため、安全運転に支障が生じる。
【0005】
また、特許文献1では、運転者の視線を検出し、運転者が視認している建物の情報を音声で通知する技術が開示されているが、音声で通知するだけでは、どの建物が対象となる建物(ランドマーク)であるかを容易に認識することができない。
【0006】
本発明は、上記問題を鑑みて為されたものであり、車外の建物を運転者に安全かつ容易に認識させることが可能な車両用情報表示装置を提供することを目的とする。
【課題を解決するための手段及び発明の効果】
【0007】
上記課題を解決するため、請求項1の車両用情報表示装置は、3次元地図データを記憶する地図データ記憶手段と、3次元地図データに含まれる建物に関する建物情報を記憶する建物情報記憶手段と、車両の現在位置を検出する位置検出手段と、車両の進行方位を検出する方位検出手段と、車両の現在位置及び進行方位に基づき3次元地図データから運転者が見ていると想定される模擬情景画像を算出し、且つ、当該模擬情景画像に含まれる建物を特定する模擬情景画像計算部と、模擬情景画像に含まれる建物に関する建物情報を建物情報記憶手段から取得する建物情報取得部と、車両のウインドシールドに映像を表示するウインドシールド表示手段と、模擬情景画像に含まれる建物に関する建物情報を、運転者から見て当該建物の近傍となるウインドシールドの領域に表示するようにウインドシールド表示手段を制御する表示制御部とを備えることを特徴とする。
【0008】
本発明によると、3次元地図データから運転者が見ていると想定される模擬的な情景の画像(以下、模擬情景画像という)を算出し、それに基づいて、建物に関する建物情報を運転者から見て当該建物の近傍となるウインドシールドの領域に表示することで、運転者は運転中であっても注視すべき方向から視線を外すことなく安全かつ容易に建物を認識することができる。
【0009】
請求項2の車両用情報表示装置は、請求項1に記載の車両用情報表示装置において、運転者の目を撮影する運転者撮像手段と、運転者撮像手段により得られる画像から運転者の視線方向を検出する視線方向検出部とを備え、模擬情景画像計算部は、車両の現在位置及び進行方位、運転者の視線方向に基づき3次元地図データから運転者が見ていると想定される模擬情景画像を算出し、且つ、当該模擬情景画像に含まれる建物を特定する。これによれば、検出した運転者の視線方向に基づいて模擬情景画像が算出されるので、建物情報の表示位置を精度良く設定できる。
【0010】
請求項3の車両用情報表示装置は、請求項1または2に記載の車両用情報表示装置において、車外を撮影する車外撮像手段と、視線方向検出部により得られる運転者の視線方向及び車外撮像手段により得られる画像から運転者が見ている実情景画像を特定する実情景画像特定部と、模擬情景画像と実情景画像とを照合して該模擬情景画像の位置補正を行う情景画像照合部とを備え、表示制御部は、該情景画像照合部により位置補正された模擬情景画像に基づいて表示制御を行う。これによれば、運転者が実際に見ている情景の画像(以下、実情景画像という)は車外を撮影する車外撮像手段によって得られることから、運転者が実際に見ている情景により近いものであり、これに模擬情景画像を照合させて位置補正を行うことで、建物情報の表示位置を精度良く設定できる。
【0011】
請求項4の車両用情報表示装置では、請求項3に記載の車両用情報表示装置において、表示制御部は、実情景画像特定部により得られる実情景画像を、運転者から見た情景と重なるようにウインドシールドに表示させる。これによれば、運転者に建物をより認識させやすくすることができる。
【0012】
請求項5の車両用情報表示装置では、請求項1ないし3のいずれか1項に記載の車両用情報表示装置において、表示制御部は、模擬情景画像計算部により得られる模擬情景画像を、運転者から見た情景と重なるようにウインドシールドに表示させる。これによれば、例えば雨天時や夜間などの視界の悪い状況でも運転者に建物をより認識させやすくすることができる。
【0013】
請求項6の車両用情報表示装置は、請求項4または5に記載の車両用情報表示装置において、実情景画像または模擬情景画像を表示するか否かを選択する選択手段を備える。これによれば、運転者は、ウインドシールドへの実情景画像または模擬情景画像の表示を必要に応じて設定できる。
【0014】
請求項7の車両用情報表示装置では、請求項1ないし6のいずれか1項に記載の車両用情報表示装置において、模擬情景画像計算部は、車両の現在位置から模擬情景画像に含まれる建物までの距離を特定し、表示制御部は、当該距離が所定値以下である場合に建物情報を非表示とする。これによれば、車両の現在位置から建物までの距離が余りにも近ければ建物情報に拠らなくても運転者が建物を認識でき、表示が却って邪魔になる場合もあるので、当該距離が所定値以下である場合に建物情報を表示させないことで、運転者にとっては、より安全であり、また表示を煩わしく思うこともない。
【0015】
請求項8の車両用情報表示装置では、請求項1ないし7のいずれか1項に記載の車両用情報表示装置において、模擬情景画像計算部は、車両の現在位置から模擬情景画像に含まれる建物までの距離を特定し、表示制御部は、当該距離が所定値以上である場合に建物情報を非表示とする。これによれば、車両の現在位置から建物までの距離が余りにも遠ければ、そもそも運転者が建物を認識できる状態にないことや、またそのような状態で建物情報を表示すると却って邪魔になる場合もあるので、当該距離が所定値以上である場合に建物情報を表示させないことで、運転者は表示を煩わしく思うこともない。
【0016】
請求項9の車両用情報表示装置では、請求項1ないし6のいずれか1項に記載の車両用情報表示装置において、模擬情景画像計算部は、車両の現在位置から模擬情景画像に含まれる建物までの距離を特定し、表示制御部は、当該距離が所定範囲内にある場合にのみ建物情報を表示させる。これによれば、運転者が建物を容易に認識できる範囲等においてのみ建物情報を表示させることができる。
【0017】
請求項10の車両用情報表示装置は、請求項7ないし9のいずれか1項に記載の車両用情報表示装置において、所定範囲または所定値を設定する設定手段を備える。これによれば、運転者は、建物情報を表示させる条件となる所定範囲または所定値を必要に応じて設定できる。
【0018】
請求項11の車両用情報表示装置では、請求項1ないし10のいずれか1項に記載の車両用情報表示装置において、表示制御部は、運転者から見て空となるウインドシールドの領域に建物情報を表示させる。これによれば、建物情報が運転者から見て空となる領域に表示されるので、表示が運転者にとって運転の邪魔になることを防ぐことができる。
【0019】
請求項12の車両用情報表示装置では、請求項1ないし11のいずれか1項に記載の車両用情報表示装置において、表示制御部は、建物情報を透過表示させる。これによれば、建物情報が透過表示されるので、表示が運転者にとって運転の邪魔になることを防ぐことができる。
【0020】
請求項13の車両用情報表示装置では、請求項1ないし12のいずれか1項に記載の車両用情報表示装置において、表示制御部は、ウインドシールド外枠側を優先的に建物情報の表示位置とする。これによれば、建物情報が運転者の視界のより外側に表示されるので、表示が運転者にとって運転の邪魔になることを防ぐことができる。
【0021】
請求項14の車両用情報表示装置では、請求項1ないし13のいずれか1項に記載の車両用情報表示装置において、模擬情景画像計算部は、車両の現在位置から模擬情景画像に含まれる建物までの距離を特定し、表示制御部は、当該距離に応じて建物情報の詳細度を変化させる。これによれば、例えば建物までの距離が短くなると詳細な建物情報を表示する等、運転者は距離に応じて必要な情報を得ることができる。
【0022】
請求項15の車両用情報表示装置では、請求項1ないし14のいずれか1項に記載の車両用情報表示装置において、表示制御部は、模擬情景画像に含まれる建物内の個別施設及びその階数に係る情報を建物情報に含めて表示させる。これによれば、運転者は建物内の情報についても得ることができる。
【0023】
請求項16の車両用情報表示装置では、請求項1ないし15のいずれか1項に記載の車両用情報表示装置において、表示制御部は、模擬情景画像に含まれる建物が運転者から見て重なる場合に、近い側の建物に係る建物情報を優先的に表示させる。これによれば、運転者から見える建物に係る建物表示のみを運転者に認識させることができる。
【0024】
請求項17の車両用情報表示装置では、請求項1ないし16のいずれか1項に記載の車両用情報表示装置において、表示制御部は、建物情報の表示とともに、運転者から見て当該建物となるウインドシールドの領域にその輪郭を強調する輪郭強調表示を表示させる。これによれば、建物の輪郭が強調されるので、運転者は建物の認識がより容易となる。
【0025】
請求項18の車両用情報表示装置は、請求項1ないし17のいずれか1項に記載の車両用情報表示装置において、建物情報を表示するか否かを選択する選択手段を備える。これによれば、運転者は、ウインドシールドへの建物情報の表示を必要に応じて行うことができる。
【発明を実施するための最良の形態】
【0026】
(1)車両用情報表示装置
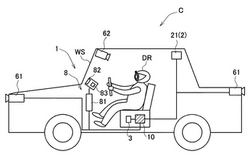
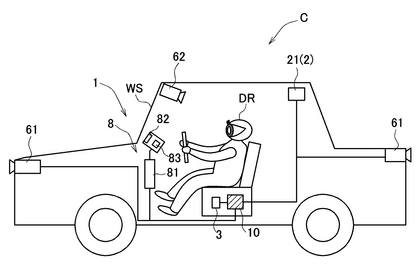
以下、本発明の車両用情報表示装置の一実施形態としての車両用ナビゲーション装置を、図面を参照しながら説明する。車両用ナビゲーション装置1(以下、単にナビゲーション装置1という)は、図1に示すように車両Cに取り付けられ、
運転者DRに対して建物BLを安全かつ容易に認識させるべく、ウインドシールド表示装置8によってウインドシールドWSに建物情報表示DIを表示する(図8参照)。以下、ナビゲーション装置1の詳細な構成及び作動について説明する。
【0027】
(2)装置構成
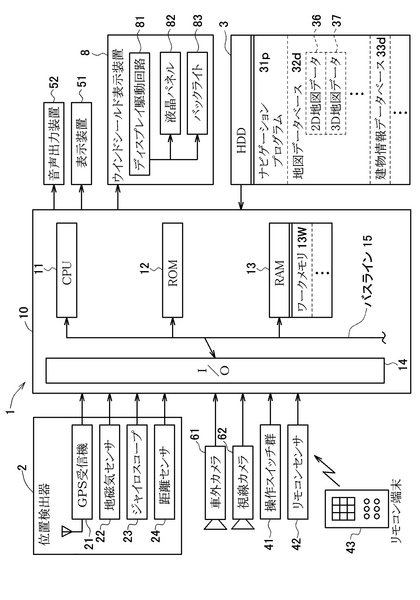
ナビゲーション装置1の構成について説明する。図1は、車両Cに取り付けられた状態のナビゲーション装置1を概略的に表す図であり、図2は、ナビゲーション装置1の電気的ブロック図を示すものである。ナビゲーション装置1は、位置検出器2,車外カメラ61,視線カメラ62,操作スイッチ群41,リモコン端末43,リモコンセンサ42,表示装置51,音声出力装置52,ウインドシールド表示装置8,ハードディスク装置(HDD)3及びこれらが接続された制御回路10を備えている。
【0028】
位置検出器2は、GPS衛星から送信されたGPS電波を受信し、その受信したGPS電波に格納されているパラメータを演算して位置データを取得するGPS受信機21、地磁気に基づいて方位を検出し、その検出した方位を表す方位データを取得する地磁気センサ22、角速度を検出することに基づいて方位を算出し、その算出した方位を示す方位データを取得するジャイロスコープ23、走行距離を検出し、その検出した距離を示す距離データを取得する距離センサ24を備えて構成され、各センサが取得した各データを相互補完することによって、自車の現在位置の検出(特定)と正確な走行距離の計測を行う。以上の構成によって、位置検出器2は、本発明の位置検出手段及び方位検出手段として機能する。具体的には、車両の現在位置は主にGPS受信器21によって検出され、車両の進行方位は地磁気センサ22及びジャイロスコープ23によって検出される。
【0029】
車外カメラ61は、本発明の車外撮像手段として機能するものであり、CCDカメラで構成され、車外を撮影して、撮影した映像をビデオ信号として制御回路10に入力する。
【0030】
視線カメラ62は、本発明の運転者撮像手段として機能するものであり、CCDカメラで構成され、運転者DRの目を撮影して、撮影した映像をビデオ信号として制御回路10に入力する。この画像を基に運転者DRの視線方向が検出される。
【0031】
操作スイッチ群41は、例えば、表示装置51と一体になったタッチスイッチ若しくはメカニカルなスイッチ等が用いられる。タッチスイッチは、表示装置51の画面上に縦横に微細に配置された赤外線センサより構成されており、例えば指やタッチペンなどでその赤外線を遮断すると、その遮断した位置が次元座標値(X,Y)として検出される。あるいは、表示装置51の画面上に感圧式の抵抗膜を配置し、指等で押下すると、押下した位置が次元座標値(X,Y)として検出される。また、マウスやカーソル等のポインティングデバイスを用いてもよい。リモコン端末43も、この操作スイッチ群41と同等の機能を有して構成されている。以上の構成により、操作スイッチ群41及びリモコン端末43は本発明の選択手段及び設定手段として機能する。
【0032】
表示装置51は、カラー液晶表示器により構成されており、その画面には位置検出器2から入力された車両現在位置マークと、HDD3から入力された地図データと、更に地図上に表示する誘導経路等付加データとを重ね合わせて表示するとともに、本画面に経路案内の設定及び経路誘導中の案内が表示される。また、音声出力装置52は、アンプやスピーカから構成され、目的地までの経路案内の実行時には案内のための合成音声を出力する。
【0033】
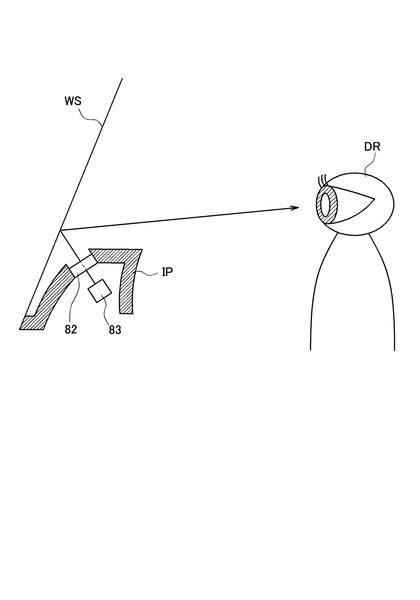
ウインドシールド表示装置8は、本発明のウインドシールド表示手段として機能するものであり、車両CのウインドシールドWSに映像を表示する(図1及び図14参照)。ウインドシールド表示装置8は、制御回路10から出力された表示命令に基づいてディスプレイ駆動回路81が液晶パネル82及びバックライト83を駆動する。具体的には、液晶パネル82及びバックライト83は、図14に示すように、ウインドシールドWSの下側から車両の内側へ延出するインストルメントパネルIPに配設されている。液晶パネル82は、インストルメントパネルIPの開口部分に支持されており、ディスプレイ駆動回路81により駆動するとともにバックライト83からの光を受けることで表示画像を表示する。そして、この表示画像は、表示光としてウインドシールドWSに入射され、運転席に着座した運転者DRの目に向けて反射されることで、虚像として運転者DRに捕らえられる。
【0034】
ハードディスク装置(HDD)3は、制御回路10(CPU11)を作動させるためのナビゲーションプログラム(以下、ナビプログラムと称する)31pを記憶している。なお、ナビプログラム31pは、制御部10のROM12に格納されていてもよい。また、HDD3は、ナビプログラム31pの動作に必要な種々のデータ、すなわち、地図描画のための地図データ(地図データベース32d),位置検出精度向上のためのマップマッチング用データ,建物(施設)情報データ(建物情報データベース33d)等を記憶しており、要求に応じて制御部10にデータを入力する。なお、これらのデータは、例えばCD−ROM,DVD−ROM,メモリカードなどの情報記録媒体に記憶させ、データ入力器から制御部10に入力するようにしてもよい。以上の構成により、HDD3は、本発明の地図データ記憶手段及び建物情報記憶手段として機能する。
【0035】
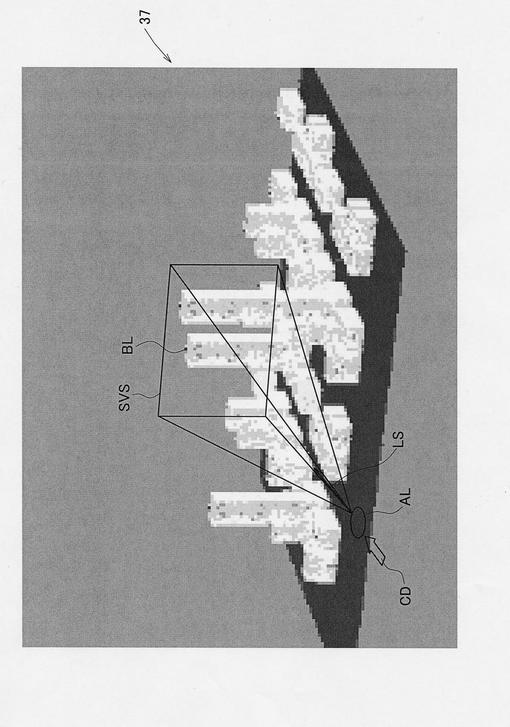
HDD3に構築された地図データベース32d(地図データ記憶手段)は、表示装置51の画面に表示される2次元地図データ(2D地図データ)36と、3次元地図データ(3D地図データ)37とを記憶している。ここで、3次元地図データ37は、通常の地図情報に加えて、建物の形状データと高さ情報を有しており(図5に3次元地図データ37のイメージ図を示す)、後述する模擬情景画像SVS(図5及び図6参照)の計算に用いられる。
【0036】
HDD3に構築された建物情報データベース33d(建物情報記憶手段)は、地図データ36,37に含まれる建物に関する建物情報を記憶している。すなわち、建物情報は、建物の名称や各建物についての詳細情報(例えば、各建物に含まれる施設の名称や建物内の階数、ジャンル等)などが地図データ36,37の地図上の位置と関連付けた状態で記憶されている。
【0037】
制御回路10は、通常のコンピュータとして構成されており、周知のCPU11,ROM12,RAM13,入出力インターフェース(I/O)14及びこれらの構成を接続するバスライン15が備えられている。CPU11は、HDD3に記憶されたナビプログラム31p及び種々のデータにより制御を行う。このナビプログラム31pは、RAM13上にてナビプログラム用ワークメモリ13wを作業領域とする形で作動する。以上の構成によって、制御回路10は、CPU11によりナビプログラム31pが起動されると、本発明の視線方向検出部,模擬情景画像計算部,建物情報取得部,表示制御部,実情景画像特定部,情景画像照合部,として機能する。
【0038】
(3)装置作動
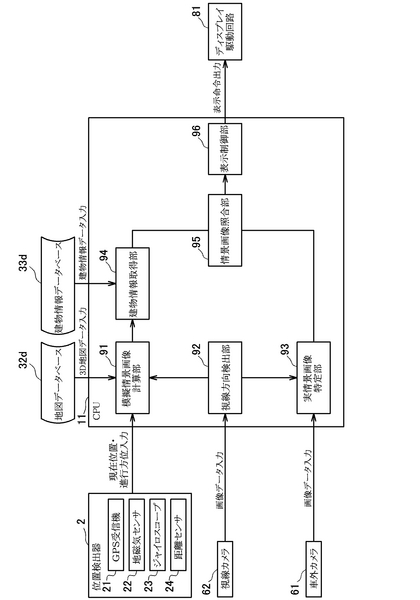
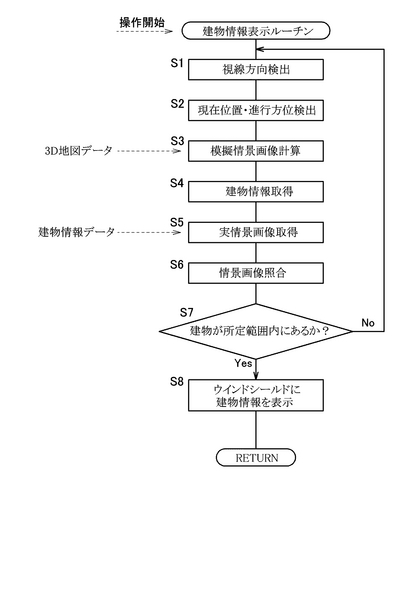
次に、ナビゲーション装置1の作動について、図3及び図4を参照して説明する。ここで、図3は、ナビゲーション装置1のCPU11が実行するナビプログラム31pの建物情報表示ルーチンを機能ブロック図で示すものであり、図4は同処理をフローチャートで示すものである。
【0039】
(3−1)メインルーチン
ナビプログラム31pのメインルーチンについて説明する。メインルーチン(図示せず)では、目的地設定処理,経路探索処理,経路案内処理が順に行われる。まず、目的地設定処理では、CPU11は、表示装置51の画面に目的地設定のためのメニューを表示し、運転者に操作スイッチ群41による目的地の入力を促す。次に、経路探索処理では、CPU11は、運転者が操作スイッチ群41により目的地を入力したことを検知すると、位置検出器2から得られるデータにより自車両Cの現在位置を求め、該現在位置から目的地までの最適な経路を探索する。このような自動的に最適な経路を設定する手法は、ダイクストラ法等の手法が知られている。次に、経路案内処理では、経路探索処理で求めた経路を表示装置51の画面上の道路地図に重ねて表示し、運転者に適切な経路を案内する。また、表示装置51や音声出力装置52によって操作時のガイダンスや動作状態に応じたメッセージの報知を行う。
【0040】
(3−2)建物情報表示ルーチン
図3及び図4に示す建物情報表示ルーチンについて説明する。建物情報表示ルーチンは、上記メインルーチンの経路案内処理中において、CPU11が操作スイッチ群41等の操作を検知することで開始される。具体的には、運転者が車外の景色から案内されたランドマーク等の建物を発見できない場合などに、ウインドシールドWSへの建物情報の表示を希望し、その操作を操作スイッチ群41等によって開始すると、CPU11がそれを検知して建物情報表示ルーチンが開始される。
【0041】
建物情報表示ルーチンが開始されると、CPU11は、視線カメラ62(図1参照)により得られる画像から運転者DRの視線方向を検出する(ステップS1,視線方向検出部92)。具体的には、視線カメラ62は運転者DRの顔面付近を撮影しており、この画像データの入力を受けたCPU11は、顔面画像から眼球領域を特定するとともに、眼球形状の曲率から眼球中心座標を求める。その一方、眼球領域から黒目(瞳孔)領域を特定して黒目中心座標も求める。そして、眼球中心座標から黒目中心座標へと向かう方向を視線方向として定める。なお、視線方向の検出には、他にも赤外光を用いる角膜反射法や強膜反射法などを用いることができる。
【0042】
次に、CPU11は、車両Cの現在位置及び進行方位を位置検出器2から取得する(ステップS2,模擬情景画像計算部91)。具体的には、車両Cの現在位置は主にGPS受信器21から、車両Cの進行方位は地磁気センサ22やジャイロスコープ23から取得できる。
【0043】
次に、CPU11は、図5のイメージ図に示すように、地図データベース32d内の3次元地図データ37から車両Cの現在位置AL及び進行方位CD、運転者DRの視線方向LSに基づいて、運転者DRが見ていると想定される模擬情景画像SVS(図6参照)を算出する(ステップS3,模擬情景画像計算部91)。図6に示すような2次元的に表された模擬情景画像SVSは、3次元地図データ37からレイトレーシング法等の手法により得ることができる。模擬情景画像SVSとなる範囲は、図5に示すように、例えば、運転者DRの視線方向LSを中心として上下左右に所定角度広がった範囲とすることができる。また、奥行きは、運転者DRの視線方向LSに沿った所定の長さで区切ることができる。
【0044】
また、CPU11は、模擬情景画像SVSを得るのと合わせて、模擬情景画像SVSに含まれる建物BLを特定する。具体的には、建物BLの地図上の位置や車両Cの現在位置から建物BLまでの距離が特定される。なお、ここでは、模擬情景画像SVSに含まれる全ての建物BLの特定を行ってもよいが、模擬情景画像SVSの中で所定の条件を満たす建物BLのみを特定するようにしてもよい。すなわち、例えば、ランドマークとなるような一定の高さ以上の建物BLのみを特定したり、経路案内において案内を行うべき建物BLのみを特定したりできる。
【0045】
次に、CPU11は、特定された建物BLに関する建物情報を建物情報データベース33dから取得する(ステップS4,建物情報取得部94)。建物情報データベース33dでは、地図上の地点と関連付けた状態で建物情報が記憶されているので、上記ステップ3で特定された建物BLの地図上の位置を基に、建物BLの建物情報が取得できる。
【0046】
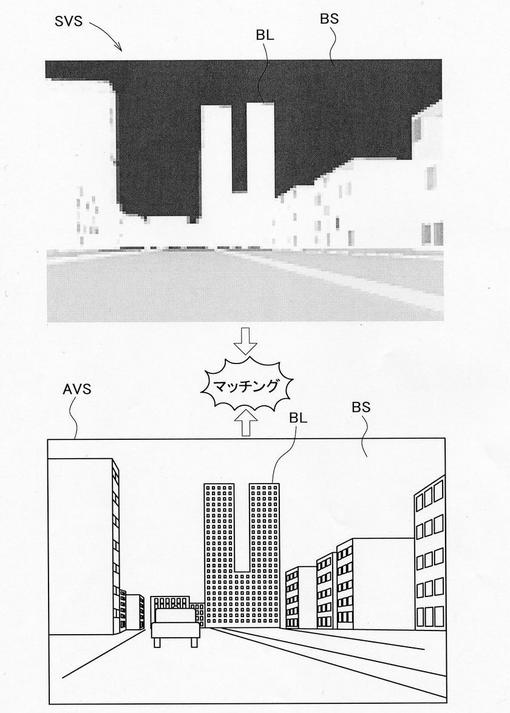
一方、CPU11は、運転者DRの視線方向及び車外カメラ61により得られる画像から運転者DRが見ている実情景画像AVS(図7参照)を特定する(ステップS5,実情景画像特定部93)。すなわち、車外カメラ61の撮影により得られる画像のうち運転者DRの視線方向にある部分を、運転者DRが見ている実情景画像AVSとして特定する。
【0047】
そして、CPU11は、図7に示すように、模擬情景画像SVSと実情景画像AVSとを照合(パターンマッチング)させて模擬情景画像SVSの位置補正を行う(ステップS6,情景画像照合部95)。模擬情景画像SVSは、3次元地図データ37から生成しており、運転者DRが実際に見ている情景とはズレている場合があることから、運転者DRが見ている情景により近い実情景画像AVSに模擬情景画像SVSを合わせることで、後述するウインドシールドWSへの建物情報の表示位置を精度良くすることができる。
【0048】
次に、CPU11は、車両Cの現在位置から建物BLまでの距離が所定範囲内にあるか否かを判定する(ステップS7,表示制御部96)。例えば、あまりにも距離が遠ければ運転者DRが建物BLを認識できない場合があるし、他方、あまりにも距離が近ければ建物情報に拠らなくても運転者DRが建物BLを認識でき、表示させることが却って邪魔になる場合もあるので、距離が所定範囲内にある場合に限って建物表示を表示する。なお、所定範囲は、操作スイッチ群41等により設定することができる。ここで、距離が所定範囲外であれば(ステップS7:No)、上述した模擬情景画像の計算(ステップS3)や実情景画像の取得(ステップS5)を継続する。
【0049】
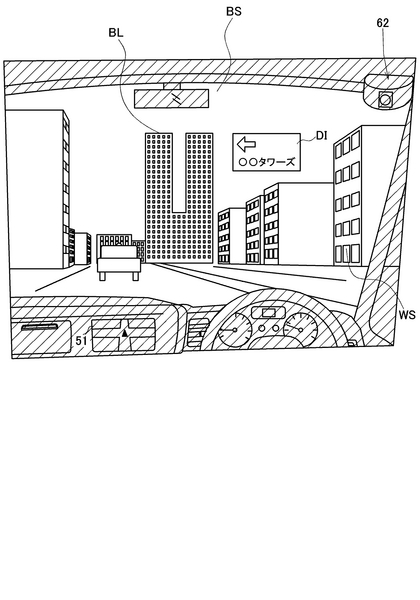
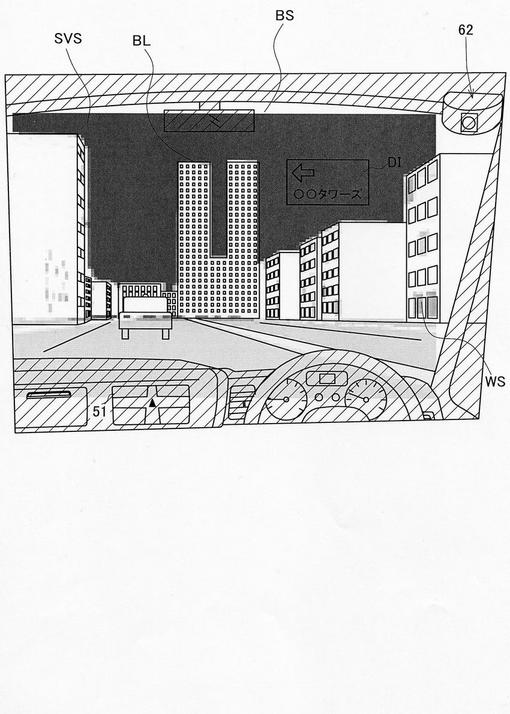
車両Cの現在位置から建物BLまでの距離が所定範囲内であれば(ステップS7:Yes)、CPU11は、ディスプレイ駆動回路81に表示命令を出力し、図8に示すようにウインドシールドWSに建物情報表示DIを表示させる(ステップS8,表示制御部96)。建物情報表示DIは、例えば建物BLの名称を含み、運転者DRから見て建物BLの近傍となるウインドシールドWSの領域に表示される。これにより、運転者DRは、注視すべき方向から視線をそらさずに、建物BLの位置及びその情報(名称等)を容易に把握することができる。建物情報表示DIの表示位置は、模擬情景画像SVS(図6参照)において定められ、それがウインドシールドWS上に反映される。ここで、模擬情景画像SVSは、上述したように情景画像照合部95によって位置補正されているので(図7参照)、模擬情景画像SVSで定めた表示位置が運転者DRの実際に見ている情景とリンクする。
【0050】
建物情報表示DIは、図8に示すように、運転者DRから見て空となるウインドシールドWSの領域(空領域BS)に表示される。空領域BSは、3次元地図データ37から得られる模擬情景画像SVSから特定することができる。例えば、模擬情景画像SVSをレイトレーシング法で得る場合において、建物BL等の物体から届く光線が存在しない領域を空領域BSとする。また、建物情報表示DIは、建物BLの近傍となる位置のうち、ウインドシールドWSの外枠側を優先的に表示位置とする。これは、例えば、運転者DRの視線方向を基に模擬情景画像SVSの中でのウインドシールドWSの範囲を特定することで、該範囲内の外縁側を表示位置として定めることができる。また、運転者DRの視線方向がウインドシールドWSの中心付近にあると仮定して、該中心(視線方向)からより遠い位置を表示位置として定めることもできる。このようにして建物情報表示DIが表示されることで、運転者DRの視界を塞いで運転の妨げになるような事態を避けることができる。なお、建物情報表示DIは、これらの表示形態に限らず、図9〜図12に示すような種々の表示形態が可能である。以下、各々について説明する。
【0051】
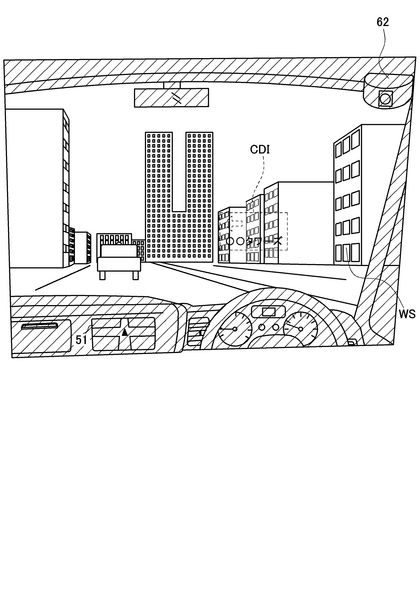
建物情報表示DIは、図9に示すように、透過表示させることができる(透過建物情報表示CDI)。これは、ウインドシールドWSに表示される建物情報表示DIの透明度を上げることの他に、明度を下げることでも実現できる。例えば、高いビルに囲まれている等の状況ではウインドシールドWSの空領域BSが少なくなってその他の領域に表示を行う必要が生じるが、このような場合に透過建物情報表示CDIを用いることで、運転の妨げになるような事態を避けることができる。
【0052】
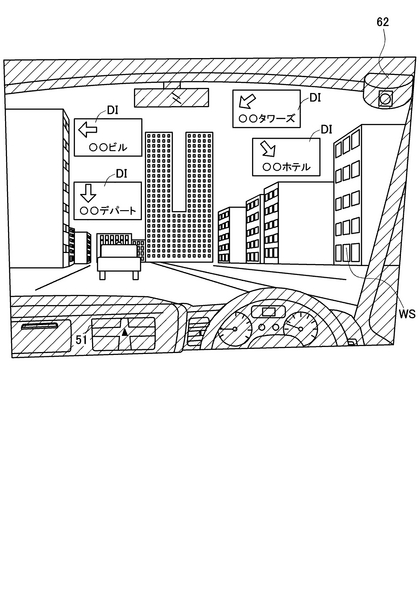
建物情報表示DIは、図10に示すように、複数表示させることができる。この際、建物BLが運転者から見て重なる場合があるので、近い側の建物に係る建物情報表示DIを優先的に表示させることで、運転者DRが見える建物BLに係る建物情報表示DIのみを運転者DRに認識させることができる。建物BLが運転者から見て重なるか否かは、3次元データ37における車両Cを基準とした建物同士の位置関係及び高さ関係等で判別できる。
【0053】
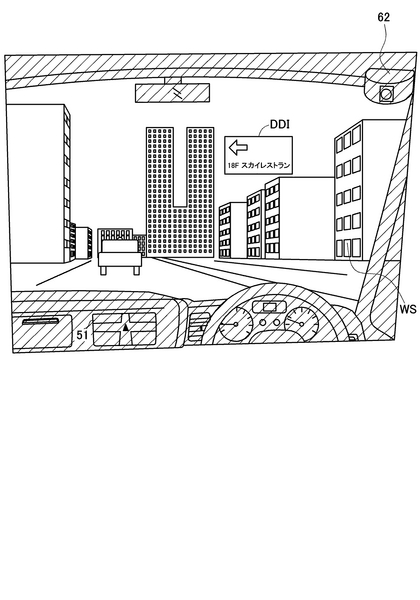
建物情報表示DIは、車両Cの現在位置から建物BLまでの距離に応じてその詳細度を変化させることができる。例えば、最初は図8に示すように建物名を含む建物情報表示DIを表示しておき、車両Cが所定の距離まで近付くと、建物情報データベース33dから建物BLの更なる詳細な情報(建物BL内の個別施設の名称やその階数を建物情報)を読み出し、これを含めて図11に示すような詳細建物情報表示DDIに切替える。これにより、運転者DRは段階的に詳細な建物情報を取得できる。
【0054】
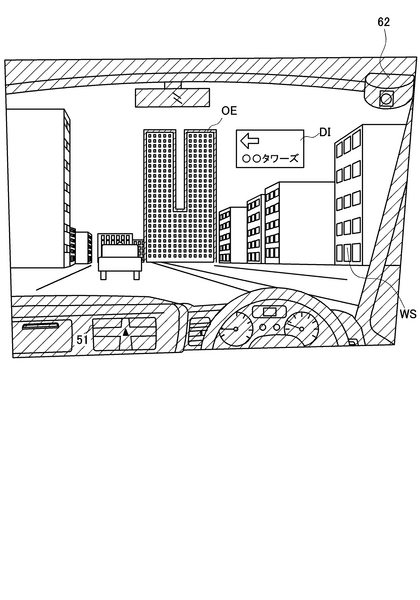
建物情報表示DIに加えて、図12に示すように、運転者DRから見て建物BLとなるウインドシールドWSの領域にその輪郭を強調する輪郭強調表示OEを表示させることもできる。3次元地図データ37から模擬情景画像SVSを得る際に、建物BLの領域とその他の領域とは区別されるので、その境界(すなわち建物BLの輪郭)に沿った領域に輪郭強調表示OEを表示することで、運転者DRがより建物BLを認識しやすくなる。
【0055】
ウインドシールドWSには、模擬情景画像SVS(図7参照)または実情景画像AVS(図7参照)を、運転者から見た情景と重なるように表示させることができる。重ね合わせる画像は、運転者DRの運転の邪魔とならないように、透明度や明度を調整して透過表示とすることが好ましい。図13に、模擬情景画像SVSを重ねて表示した場合を示す。これによれば、例えば夜間走行の場合等でも建物BLの認識が容易となる。なお、模擬情景画像SVSまたは実情景画像AVSを表示するか否かの選択は、操作スイッチ群41等の操作によって行うことができる。
【0056】
以上、本発明の実施形態について説明したが、本発明はこれらに限定されず、その要旨を逸脱しない範囲で適宜変更して実施し得るものである。
【図面の簡単な説明】
【0057】
【図1】車両に取り付けられた状態の本発明の車両用情報表示装置を概略的に表す図
【図2】本発明の車両用情報表示装置の電気的ブロック図
【図3】本発明の車両用情報表示装置が行う処理を表す機能ブロック図
【図4】本発明の車両用情報表示装置が行う処理を表すフローチャート
【図5】3次元地図データの説明図
【図6】模擬情景画像の説明図
【図7】模擬情景画像と実情景画像の照合に関する説明図
【図8】ウインドシールドへの第1表示例を示す図
【図9】ウインドシールドへの第2表示例を示す図
【図10】ウインドシールドへの第3表示例を示す図
【図11】ウインドシールドへの第4表示例を示す図
【図12】ウインドシールドへの第5表示例を示す図
【図13】ウインドシールドへの第6表示例を示す図
【図14】ウインドシールド表示装置の説明図
【符号の説明】
【0058】
1 車両用ナビゲーション装置(車両用情報表示装置)
2 位置検出器(位置検出手段,方位検出手段)
3 ハードディスク(地図データ記憶手段,建物情報記憶手段)
32d 地図データベース
33d 建物情報データベース
37 3次元地図データ
41 操作スイッチ群(選択手段,設定手段)
43 リモコン端末(選択手段,設定手段)
61 車外カメラ(車外撮像手段)
62 視線カメラ(運転者撮像手段)
8 ウインドシールド表示装置(ウインドシールド表示手段)
10 制御部(表示制御部,視線方向検出部,模擬情景画像計算部,建物情報取得部,実情景画像特定部,情景画像照合部)
【技術分野】
【0001】
本発明は、運転者から見える建物の情報を表示する車両用情報表示装置に関する。
【背景技術】
【0002】
車両用ナビゲーション装置では、運転者に対して経路案内を行う場合に、目立つ建物(ランドマーク)を目印として案内する方法が用いられている。例えば、ダッシュボード付近に設置されたディスプレイ上の地図にランドマークを表示するとともに、該当するランドマークに近づいていることを音声で運転者に伝達することで案内を行う。
【0003】
【特許文献1】特開2004−037260号公報
【特許文献2】特開平7−257228号公報
【発明の開示】
【発明が解決しようとする課題】
【0004】
しかし、そのような案内(報知)の仕方は、運転者がランドマークを知っている場合は良いが、ランドマークを知らない場合には、まずディスプレイからランドマークの位置と特徴を短時間で認識し、その後ランドマークを車外の景色から探し出すことが必要となる。この動作は、運転者の視線を色々な方向に移動させることになるため、安全運転に支障が生じる。
【0005】
また、特許文献1では、運転者の視線を検出し、運転者が視認している建物の情報を音声で通知する技術が開示されているが、音声で通知するだけでは、どの建物が対象となる建物(ランドマーク)であるかを容易に認識することができない。
【0006】
本発明は、上記問題を鑑みて為されたものであり、車外の建物を運転者に安全かつ容易に認識させることが可能な車両用情報表示装置を提供することを目的とする。
【課題を解決するための手段及び発明の効果】
【0007】
上記課題を解決するため、請求項1の車両用情報表示装置は、3次元地図データを記憶する地図データ記憶手段と、3次元地図データに含まれる建物に関する建物情報を記憶する建物情報記憶手段と、車両の現在位置を検出する位置検出手段と、車両の進行方位を検出する方位検出手段と、車両の現在位置及び進行方位に基づき3次元地図データから運転者が見ていると想定される模擬情景画像を算出し、且つ、当該模擬情景画像に含まれる建物を特定する模擬情景画像計算部と、模擬情景画像に含まれる建物に関する建物情報を建物情報記憶手段から取得する建物情報取得部と、車両のウインドシールドに映像を表示するウインドシールド表示手段と、模擬情景画像に含まれる建物に関する建物情報を、運転者から見て当該建物の近傍となるウインドシールドの領域に表示するようにウインドシールド表示手段を制御する表示制御部とを備えることを特徴とする。
【0008】
本発明によると、3次元地図データから運転者が見ていると想定される模擬的な情景の画像(以下、模擬情景画像という)を算出し、それに基づいて、建物に関する建物情報を運転者から見て当該建物の近傍となるウインドシールドの領域に表示することで、運転者は運転中であっても注視すべき方向から視線を外すことなく安全かつ容易に建物を認識することができる。
【0009】
請求項2の車両用情報表示装置は、請求項1に記載の車両用情報表示装置において、運転者の目を撮影する運転者撮像手段と、運転者撮像手段により得られる画像から運転者の視線方向を検出する視線方向検出部とを備え、模擬情景画像計算部は、車両の現在位置及び進行方位、運転者の視線方向に基づき3次元地図データから運転者が見ていると想定される模擬情景画像を算出し、且つ、当該模擬情景画像に含まれる建物を特定する。これによれば、検出した運転者の視線方向に基づいて模擬情景画像が算出されるので、建物情報の表示位置を精度良く設定できる。
【0010】
請求項3の車両用情報表示装置は、請求項1または2に記載の車両用情報表示装置において、車外を撮影する車外撮像手段と、視線方向検出部により得られる運転者の視線方向及び車外撮像手段により得られる画像から運転者が見ている実情景画像を特定する実情景画像特定部と、模擬情景画像と実情景画像とを照合して該模擬情景画像の位置補正を行う情景画像照合部とを備え、表示制御部は、該情景画像照合部により位置補正された模擬情景画像に基づいて表示制御を行う。これによれば、運転者が実際に見ている情景の画像(以下、実情景画像という)は車外を撮影する車外撮像手段によって得られることから、運転者が実際に見ている情景により近いものであり、これに模擬情景画像を照合させて位置補正を行うことで、建物情報の表示位置を精度良く設定できる。
【0011】
請求項4の車両用情報表示装置では、請求項3に記載の車両用情報表示装置において、表示制御部は、実情景画像特定部により得られる実情景画像を、運転者から見た情景と重なるようにウインドシールドに表示させる。これによれば、運転者に建物をより認識させやすくすることができる。
【0012】
請求項5の車両用情報表示装置では、請求項1ないし3のいずれか1項に記載の車両用情報表示装置において、表示制御部は、模擬情景画像計算部により得られる模擬情景画像を、運転者から見た情景と重なるようにウインドシールドに表示させる。これによれば、例えば雨天時や夜間などの視界の悪い状況でも運転者に建物をより認識させやすくすることができる。
【0013】
請求項6の車両用情報表示装置は、請求項4または5に記載の車両用情報表示装置において、実情景画像または模擬情景画像を表示するか否かを選択する選択手段を備える。これによれば、運転者は、ウインドシールドへの実情景画像または模擬情景画像の表示を必要に応じて設定できる。
【0014】
請求項7の車両用情報表示装置では、請求項1ないし6のいずれか1項に記載の車両用情報表示装置において、模擬情景画像計算部は、車両の現在位置から模擬情景画像に含まれる建物までの距離を特定し、表示制御部は、当該距離が所定値以下である場合に建物情報を非表示とする。これによれば、車両の現在位置から建物までの距離が余りにも近ければ建物情報に拠らなくても運転者が建物を認識でき、表示が却って邪魔になる場合もあるので、当該距離が所定値以下である場合に建物情報を表示させないことで、運転者にとっては、より安全であり、また表示を煩わしく思うこともない。
【0015】
請求項8の車両用情報表示装置では、請求項1ないし7のいずれか1項に記載の車両用情報表示装置において、模擬情景画像計算部は、車両の現在位置から模擬情景画像に含まれる建物までの距離を特定し、表示制御部は、当該距離が所定値以上である場合に建物情報を非表示とする。これによれば、車両の現在位置から建物までの距離が余りにも遠ければ、そもそも運転者が建物を認識できる状態にないことや、またそのような状態で建物情報を表示すると却って邪魔になる場合もあるので、当該距離が所定値以上である場合に建物情報を表示させないことで、運転者は表示を煩わしく思うこともない。
【0016】
請求項9の車両用情報表示装置では、請求項1ないし6のいずれか1項に記載の車両用情報表示装置において、模擬情景画像計算部は、車両の現在位置から模擬情景画像に含まれる建物までの距離を特定し、表示制御部は、当該距離が所定範囲内にある場合にのみ建物情報を表示させる。これによれば、運転者が建物を容易に認識できる範囲等においてのみ建物情報を表示させることができる。
【0017】
請求項10の車両用情報表示装置は、請求項7ないし9のいずれか1項に記載の車両用情報表示装置において、所定範囲または所定値を設定する設定手段を備える。これによれば、運転者は、建物情報を表示させる条件となる所定範囲または所定値を必要に応じて設定できる。
【0018】
請求項11の車両用情報表示装置では、請求項1ないし10のいずれか1項に記載の車両用情報表示装置において、表示制御部は、運転者から見て空となるウインドシールドの領域に建物情報を表示させる。これによれば、建物情報が運転者から見て空となる領域に表示されるので、表示が運転者にとって運転の邪魔になることを防ぐことができる。
【0019】
請求項12の車両用情報表示装置では、請求項1ないし11のいずれか1項に記載の車両用情報表示装置において、表示制御部は、建物情報を透過表示させる。これによれば、建物情報が透過表示されるので、表示が運転者にとって運転の邪魔になることを防ぐことができる。
【0020】
請求項13の車両用情報表示装置では、請求項1ないし12のいずれか1項に記載の車両用情報表示装置において、表示制御部は、ウインドシールド外枠側を優先的に建物情報の表示位置とする。これによれば、建物情報が運転者の視界のより外側に表示されるので、表示が運転者にとって運転の邪魔になることを防ぐことができる。
【0021】
請求項14の車両用情報表示装置では、請求項1ないし13のいずれか1項に記載の車両用情報表示装置において、模擬情景画像計算部は、車両の現在位置から模擬情景画像に含まれる建物までの距離を特定し、表示制御部は、当該距離に応じて建物情報の詳細度を変化させる。これによれば、例えば建物までの距離が短くなると詳細な建物情報を表示する等、運転者は距離に応じて必要な情報を得ることができる。
【0022】
請求項15の車両用情報表示装置では、請求項1ないし14のいずれか1項に記載の車両用情報表示装置において、表示制御部は、模擬情景画像に含まれる建物内の個別施設及びその階数に係る情報を建物情報に含めて表示させる。これによれば、運転者は建物内の情報についても得ることができる。
【0023】
請求項16の車両用情報表示装置では、請求項1ないし15のいずれか1項に記載の車両用情報表示装置において、表示制御部は、模擬情景画像に含まれる建物が運転者から見て重なる場合に、近い側の建物に係る建物情報を優先的に表示させる。これによれば、運転者から見える建物に係る建物表示のみを運転者に認識させることができる。
【0024】
請求項17の車両用情報表示装置では、請求項1ないし16のいずれか1項に記載の車両用情報表示装置において、表示制御部は、建物情報の表示とともに、運転者から見て当該建物となるウインドシールドの領域にその輪郭を強調する輪郭強調表示を表示させる。これによれば、建物の輪郭が強調されるので、運転者は建物の認識がより容易となる。
【0025】
請求項18の車両用情報表示装置は、請求項1ないし17のいずれか1項に記載の車両用情報表示装置において、建物情報を表示するか否かを選択する選択手段を備える。これによれば、運転者は、ウインドシールドへの建物情報の表示を必要に応じて行うことができる。
【発明を実施するための最良の形態】
【0026】
(1)車両用情報表示装置
以下、本発明の車両用情報表示装置の一実施形態としての車両用ナビゲーション装置を、図面を参照しながら説明する。車両用ナビゲーション装置1(以下、単にナビゲーション装置1という)は、図1に示すように車両Cに取り付けられ、
運転者DRに対して建物BLを安全かつ容易に認識させるべく、ウインドシールド表示装置8によってウインドシールドWSに建物情報表示DIを表示する(図8参照)。以下、ナビゲーション装置1の詳細な構成及び作動について説明する。
【0027】
(2)装置構成
ナビゲーション装置1の構成について説明する。図1は、車両Cに取り付けられた状態のナビゲーション装置1を概略的に表す図であり、図2は、ナビゲーション装置1の電気的ブロック図を示すものである。ナビゲーション装置1は、位置検出器2,車外カメラ61,視線カメラ62,操作スイッチ群41,リモコン端末43,リモコンセンサ42,表示装置51,音声出力装置52,ウインドシールド表示装置8,ハードディスク装置(HDD)3及びこれらが接続された制御回路10を備えている。
【0028】
位置検出器2は、GPS衛星から送信されたGPS電波を受信し、その受信したGPS電波に格納されているパラメータを演算して位置データを取得するGPS受信機21、地磁気に基づいて方位を検出し、その検出した方位を表す方位データを取得する地磁気センサ22、角速度を検出することに基づいて方位を算出し、その算出した方位を示す方位データを取得するジャイロスコープ23、走行距離を検出し、その検出した距離を示す距離データを取得する距離センサ24を備えて構成され、各センサが取得した各データを相互補完することによって、自車の現在位置の検出(特定)と正確な走行距離の計測を行う。以上の構成によって、位置検出器2は、本発明の位置検出手段及び方位検出手段として機能する。具体的には、車両の現在位置は主にGPS受信器21によって検出され、車両の進行方位は地磁気センサ22及びジャイロスコープ23によって検出される。
【0029】
車外カメラ61は、本発明の車外撮像手段として機能するものであり、CCDカメラで構成され、車外を撮影して、撮影した映像をビデオ信号として制御回路10に入力する。
【0030】
視線カメラ62は、本発明の運転者撮像手段として機能するものであり、CCDカメラで構成され、運転者DRの目を撮影して、撮影した映像をビデオ信号として制御回路10に入力する。この画像を基に運転者DRの視線方向が検出される。
【0031】
操作スイッチ群41は、例えば、表示装置51と一体になったタッチスイッチ若しくはメカニカルなスイッチ等が用いられる。タッチスイッチは、表示装置51の画面上に縦横に微細に配置された赤外線センサより構成されており、例えば指やタッチペンなどでその赤外線を遮断すると、その遮断した位置が次元座標値(X,Y)として検出される。あるいは、表示装置51の画面上に感圧式の抵抗膜を配置し、指等で押下すると、押下した位置が次元座標値(X,Y)として検出される。また、マウスやカーソル等のポインティングデバイスを用いてもよい。リモコン端末43も、この操作スイッチ群41と同等の機能を有して構成されている。以上の構成により、操作スイッチ群41及びリモコン端末43は本発明の選択手段及び設定手段として機能する。
【0032】
表示装置51は、カラー液晶表示器により構成されており、その画面には位置検出器2から入力された車両現在位置マークと、HDD3から入力された地図データと、更に地図上に表示する誘導経路等付加データとを重ね合わせて表示するとともに、本画面に経路案内の設定及び経路誘導中の案内が表示される。また、音声出力装置52は、アンプやスピーカから構成され、目的地までの経路案内の実行時には案内のための合成音声を出力する。
【0033】
ウインドシールド表示装置8は、本発明のウインドシールド表示手段として機能するものであり、車両CのウインドシールドWSに映像を表示する(図1及び図14参照)。ウインドシールド表示装置8は、制御回路10から出力された表示命令に基づいてディスプレイ駆動回路81が液晶パネル82及びバックライト83を駆動する。具体的には、液晶パネル82及びバックライト83は、図14に示すように、ウインドシールドWSの下側から車両の内側へ延出するインストルメントパネルIPに配設されている。液晶パネル82は、インストルメントパネルIPの開口部分に支持されており、ディスプレイ駆動回路81により駆動するとともにバックライト83からの光を受けることで表示画像を表示する。そして、この表示画像は、表示光としてウインドシールドWSに入射され、運転席に着座した運転者DRの目に向けて反射されることで、虚像として運転者DRに捕らえられる。
【0034】
ハードディスク装置(HDD)3は、制御回路10(CPU11)を作動させるためのナビゲーションプログラム(以下、ナビプログラムと称する)31pを記憶している。なお、ナビプログラム31pは、制御部10のROM12に格納されていてもよい。また、HDD3は、ナビプログラム31pの動作に必要な種々のデータ、すなわち、地図描画のための地図データ(地図データベース32d),位置検出精度向上のためのマップマッチング用データ,建物(施設)情報データ(建物情報データベース33d)等を記憶しており、要求に応じて制御部10にデータを入力する。なお、これらのデータは、例えばCD−ROM,DVD−ROM,メモリカードなどの情報記録媒体に記憶させ、データ入力器から制御部10に入力するようにしてもよい。以上の構成により、HDD3は、本発明の地図データ記憶手段及び建物情報記憶手段として機能する。
【0035】
HDD3に構築された地図データベース32d(地図データ記憶手段)は、表示装置51の画面に表示される2次元地図データ(2D地図データ)36と、3次元地図データ(3D地図データ)37とを記憶している。ここで、3次元地図データ37は、通常の地図情報に加えて、建物の形状データと高さ情報を有しており(図5に3次元地図データ37のイメージ図を示す)、後述する模擬情景画像SVS(図5及び図6参照)の計算に用いられる。
【0036】
HDD3に構築された建物情報データベース33d(建物情報記憶手段)は、地図データ36,37に含まれる建物に関する建物情報を記憶している。すなわち、建物情報は、建物の名称や各建物についての詳細情報(例えば、各建物に含まれる施設の名称や建物内の階数、ジャンル等)などが地図データ36,37の地図上の位置と関連付けた状態で記憶されている。
【0037】
制御回路10は、通常のコンピュータとして構成されており、周知のCPU11,ROM12,RAM13,入出力インターフェース(I/O)14及びこれらの構成を接続するバスライン15が備えられている。CPU11は、HDD3に記憶されたナビプログラム31p及び種々のデータにより制御を行う。このナビプログラム31pは、RAM13上にてナビプログラム用ワークメモリ13wを作業領域とする形で作動する。以上の構成によって、制御回路10は、CPU11によりナビプログラム31pが起動されると、本発明の視線方向検出部,模擬情景画像計算部,建物情報取得部,表示制御部,実情景画像特定部,情景画像照合部,として機能する。
【0038】
(3)装置作動
次に、ナビゲーション装置1の作動について、図3及び図4を参照して説明する。ここで、図3は、ナビゲーション装置1のCPU11が実行するナビプログラム31pの建物情報表示ルーチンを機能ブロック図で示すものであり、図4は同処理をフローチャートで示すものである。
【0039】
(3−1)メインルーチン
ナビプログラム31pのメインルーチンについて説明する。メインルーチン(図示せず)では、目的地設定処理,経路探索処理,経路案内処理が順に行われる。まず、目的地設定処理では、CPU11は、表示装置51の画面に目的地設定のためのメニューを表示し、運転者に操作スイッチ群41による目的地の入力を促す。次に、経路探索処理では、CPU11は、運転者が操作スイッチ群41により目的地を入力したことを検知すると、位置検出器2から得られるデータにより自車両Cの現在位置を求め、該現在位置から目的地までの最適な経路を探索する。このような自動的に最適な経路を設定する手法は、ダイクストラ法等の手法が知られている。次に、経路案内処理では、経路探索処理で求めた経路を表示装置51の画面上の道路地図に重ねて表示し、運転者に適切な経路を案内する。また、表示装置51や音声出力装置52によって操作時のガイダンスや動作状態に応じたメッセージの報知を行う。
【0040】
(3−2)建物情報表示ルーチン
図3及び図4に示す建物情報表示ルーチンについて説明する。建物情報表示ルーチンは、上記メインルーチンの経路案内処理中において、CPU11が操作スイッチ群41等の操作を検知することで開始される。具体的には、運転者が車外の景色から案内されたランドマーク等の建物を発見できない場合などに、ウインドシールドWSへの建物情報の表示を希望し、その操作を操作スイッチ群41等によって開始すると、CPU11がそれを検知して建物情報表示ルーチンが開始される。
【0041】
建物情報表示ルーチンが開始されると、CPU11は、視線カメラ62(図1参照)により得られる画像から運転者DRの視線方向を検出する(ステップS1,視線方向検出部92)。具体的には、視線カメラ62は運転者DRの顔面付近を撮影しており、この画像データの入力を受けたCPU11は、顔面画像から眼球領域を特定するとともに、眼球形状の曲率から眼球中心座標を求める。その一方、眼球領域から黒目(瞳孔)領域を特定して黒目中心座標も求める。そして、眼球中心座標から黒目中心座標へと向かう方向を視線方向として定める。なお、視線方向の検出には、他にも赤外光を用いる角膜反射法や強膜反射法などを用いることができる。
【0042】
次に、CPU11は、車両Cの現在位置及び進行方位を位置検出器2から取得する(ステップS2,模擬情景画像計算部91)。具体的には、車両Cの現在位置は主にGPS受信器21から、車両Cの進行方位は地磁気センサ22やジャイロスコープ23から取得できる。
【0043】
次に、CPU11は、図5のイメージ図に示すように、地図データベース32d内の3次元地図データ37から車両Cの現在位置AL及び進行方位CD、運転者DRの視線方向LSに基づいて、運転者DRが見ていると想定される模擬情景画像SVS(図6参照)を算出する(ステップS3,模擬情景画像計算部91)。図6に示すような2次元的に表された模擬情景画像SVSは、3次元地図データ37からレイトレーシング法等の手法により得ることができる。模擬情景画像SVSとなる範囲は、図5に示すように、例えば、運転者DRの視線方向LSを中心として上下左右に所定角度広がった範囲とすることができる。また、奥行きは、運転者DRの視線方向LSに沿った所定の長さで区切ることができる。
【0044】
また、CPU11は、模擬情景画像SVSを得るのと合わせて、模擬情景画像SVSに含まれる建物BLを特定する。具体的には、建物BLの地図上の位置や車両Cの現在位置から建物BLまでの距離が特定される。なお、ここでは、模擬情景画像SVSに含まれる全ての建物BLの特定を行ってもよいが、模擬情景画像SVSの中で所定の条件を満たす建物BLのみを特定するようにしてもよい。すなわち、例えば、ランドマークとなるような一定の高さ以上の建物BLのみを特定したり、経路案内において案内を行うべき建物BLのみを特定したりできる。
【0045】
次に、CPU11は、特定された建物BLに関する建物情報を建物情報データベース33dから取得する(ステップS4,建物情報取得部94)。建物情報データベース33dでは、地図上の地点と関連付けた状態で建物情報が記憶されているので、上記ステップ3で特定された建物BLの地図上の位置を基に、建物BLの建物情報が取得できる。
【0046】
一方、CPU11は、運転者DRの視線方向及び車外カメラ61により得られる画像から運転者DRが見ている実情景画像AVS(図7参照)を特定する(ステップS5,実情景画像特定部93)。すなわち、車外カメラ61の撮影により得られる画像のうち運転者DRの視線方向にある部分を、運転者DRが見ている実情景画像AVSとして特定する。
【0047】
そして、CPU11は、図7に示すように、模擬情景画像SVSと実情景画像AVSとを照合(パターンマッチング)させて模擬情景画像SVSの位置補正を行う(ステップS6,情景画像照合部95)。模擬情景画像SVSは、3次元地図データ37から生成しており、運転者DRが実際に見ている情景とはズレている場合があることから、運転者DRが見ている情景により近い実情景画像AVSに模擬情景画像SVSを合わせることで、後述するウインドシールドWSへの建物情報の表示位置を精度良くすることができる。
【0048】
次に、CPU11は、車両Cの現在位置から建物BLまでの距離が所定範囲内にあるか否かを判定する(ステップS7,表示制御部96)。例えば、あまりにも距離が遠ければ運転者DRが建物BLを認識できない場合があるし、他方、あまりにも距離が近ければ建物情報に拠らなくても運転者DRが建物BLを認識でき、表示させることが却って邪魔になる場合もあるので、距離が所定範囲内にある場合に限って建物表示を表示する。なお、所定範囲は、操作スイッチ群41等により設定することができる。ここで、距離が所定範囲外であれば(ステップS7:No)、上述した模擬情景画像の計算(ステップS3)や実情景画像の取得(ステップS5)を継続する。
【0049】
車両Cの現在位置から建物BLまでの距離が所定範囲内であれば(ステップS7:Yes)、CPU11は、ディスプレイ駆動回路81に表示命令を出力し、図8に示すようにウインドシールドWSに建物情報表示DIを表示させる(ステップS8,表示制御部96)。建物情報表示DIは、例えば建物BLの名称を含み、運転者DRから見て建物BLの近傍となるウインドシールドWSの領域に表示される。これにより、運転者DRは、注視すべき方向から視線をそらさずに、建物BLの位置及びその情報(名称等)を容易に把握することができる。建物情報表示DIの表示位置は、模擬情景画像SVS(図6参照)において定められ、それがウインドシールドWS上に反映される。ここで、模擬情景画像SVSは、上述したように情景画像照合部95によって位置補正されているので(図7参照)、模擬情景画像SVSで定めた表示位置が運転者DRの実際に見ている情景とリンクする。
【0050】
建物情報表示DIは、図8に示すように、運転者DRから見て空となるウインドシールドWSの領域(空領域BS)に表示される。空領域BSは、3次元地図データ37から得られる模擬情景画像SVSから特定することができる。例えば、模擬情景画像SVSをレイトレーシング法で得る場合において、建物BL等の物体から届く光線が存在しない領域を空領域BSとする。また、建物情報表示DIは、建物BLの近傍となる位置のうち、ウインドシールドWSの外枠側を優先的に表示位置とする。これは、例えば、運転者DRの視線方向を基に模擬情景画像SVSの中でのウインドシールドWSの範囲を特定することで、該範囲内の外縁側を表示位置として定めることができる。また、運転者DRの視線方向がウインドシールドWSの中心付近にあると仮定して、該中心(視線方向)からより遠い位置を表示位置として定めることもできる。このようにして建物情報表示DIが表示されることで、運転者DRの視界を塞いで運転の妨げになるような事態を避けることができる。なお、建物情報表示DIは、これらの表示形態に限らず、図9〜図12に示すような種々の表示形態が可能である。以下、各々について説明する。
【0051】
建物情報表示DIは、図9に示すように、透過表示させることができる(透過建物情報表示CDI)。これは、ウインドシールドWSに表示される建物情報表示DIの透明度を上げることの他に、明度を下げることでも実現できる。例えば、高いビルに囲まれている等の状況ではウインドシールドWSの空領域BSが少なくなってその他の領域に表示を行う必要が生じるが、このような場合に透過建物情報表示CDIを用いることで、運転の妨げになるような事態を避けることができる。
【0052】
建物情報表示DIは、図10に示すように、複数表示させることができる。この際、建物BLが運転者から見て重なる場合があるので、近い側の建物に係る建物情報表示DIを優先的に表示させることで、運転者DRが見える建物BLに係る建物情報表示DIのみを運転者DRに認識させることができる。建物BLが運転者から見て重なるか否かは、3次元データ37における車両Cを基準とした建物同士の位置関係及び高さ関係等で判別できる。
【0053】
建物情報表示DIは、車両Cの現在位置から建物BLまでの距離に応じてその詳細度を変化させることができる。例えば、最初は図8に示すように建物名を含む建物情報表示DIを表示しておき、車両Cが所定の距離まで近付くと、建物情報データベース33dから建物BLの更なる詳細な情報(建物BL内の個別施設の名称やその階数を建物情報)を読み出し、これを含めて図11に示すような詳細建物情報表示DDIに切替える。これにより、運転者DRは段階的に詳細な建物情報を取得できる。
【0054】
建物情報表示DIに加えて、図12に示すように、運転者DRから見て建物BLとなるウインドシールドWSの領域にその輪郭を強調する輪郭強調表示OEを表示させることもできる。3次元地図データ37から模擬情景画像SVSを得る際に、建物BLの領域とその他の領域とは区別されるので、その境界(すなわち建物BLの輪郭)に沿った領域に輪郭強調表示OEを表示することで、運転者DRがより建物BLを認識しやすくなる。
【0055】
ウインドシールドWSには、模擬情景画像SVS(図7参照)または実情景画像AVS(図7参照)を、運転者から見た情景と重なるように表示させることができる。重ね合わせる画像は、運転者DRの運転の邪魔とならないように、透明度や明度を調整して透過表示とすることが好ましい。図13に、模擬情景画像SVSを重ねて表示した場合を示す。これによれば、例えば夜間走行の場合等でも建物BLの認識が容易となる。なお、模擬情景画像SVSまたは実情景画像AVSを表示するか否かの選択は、操作スイッチ群41等の操作によって行うことができる。
【0056】
以上、本発明の実施形態について説明したが、本発明はこれらに限定されず、その要旨を逸脱しない範囲で適宜変更して実施し得るものである。
【図面の簡単な説明】
【0057】
【図1】車両に取り付けられた状態の本発明の車両用情報表示装置を概略的に表す図
【図2】本発明の車両用情報表示装置の電気的ブロック図
【図3】本発明の車両用情報表示装置が行う処理を表す機能ブロック図
【図4】本発明の車両用情報表示装置が行う処理を表すフローチャート
【図5】3次元地図データの説明図
【図6】模擬情景画像の説明図
【図7】模擬情景画像と実情景画像の照合に関する説明図
【図8】ウインドシールドへの第1表示例を示す図
【図9】ウインドシールドへの第2表示例を示す図
【図10】ウインドシールドへの第3表示例を示す図
【図11】ウインドシールドへの第4表示例を示す図
【図12】ウインドシールドへの第5表示例を示す図
【図13】ウインドシールドへの第6表示例を示す図
【図14】ウインドシールド表示装置の説明図
【符号の説明】
【0058】
1 車両用ナビゲーション装置(車両用情報表示装置)
2 位置検出器(位置検出手段,方位検出手段)
3 ハードディスク(地図データ記憶手段,建物情報記憶手段)
32d 地図データベース
33d 建物情報データベース
37 3次元地図データ
41 操作スイッチ群(選択手段,設定手段)
43 リモコン端末(選択手段,設定手段)
61 車外カメラ(車外撮像手段)
62 視線カメラ(運転者撮像手段)
8 ウインドシールド表示装置(ウインドシールド表示手段)
10 制御部(表示制御部,視線方向検出部,模擬情景画像計算部,建物情報取得部,実情景画像特定部,情景画像照合部)
【特許請求の範囲】
【請求項1】
3次元地図データを記憶する地図データ記憶手段と、
前記3次元地図データに含まれる建物に関する建物情報を記憶する建物情報記憶手段と、
車両の現在位置を検出する位置検出手段と、
車両の進行方位を検出する方位検出手段と、
車両の現在位置及び進行方位に基づき前記3次元地図データから運転者が見ていると想定される模擬情景画像を算出し、且つ、当該模擬情景画像に含まれる建物を特定する模擬情景画像計算部と、
前記模擬情景画像に含まれる建物に関する建物情報を前記建物情報記憶手段から取得する建物情報取得部と、
車両のウインドシールドに映像を表示するウインドシールド表示手段と、
前記模擬情景画像に含まれる建物に関する建物情報を、運転者から見て当該建物の近傍となる前記ウインドシールドの領域に表示するように前記ウインドシールド表示手段を制御する表示制御部と、
を備えることを特徴とする車両用情報表示装置。
【請求項2】
運転者の目を撮影する運転者撮像手段と、前記運転者撮像手段により得られる画像から運転者の視線方向を検出する視線方向検出部とを備え、
前記模擬情景画像計算部は、車両の現在位置及び進行方位、運転者の視線方向に基づき前記3次元地図データから運転者が見ていると想定される模擬情景画像を算出し、且つ、当該模擬情景画像に含まれる建物を特定する請求項1に記載の車両用情報表示装置。
【請求項3】
車外を撮影する車外撮像手段と、
前記視線方向検出部により得られる運転者の視線方向及び前記車外撮像手段により得られる画像から運転者が見ている実情景画像を特定する実情景画像特定部と、
前記模擬情景画像と前記実情景画像とを照合して該模擬情景画像の位置補正を行う情景画像照合部とを備え、
前記表示制御部は、該情景画像照合部により位置補正された前記模擬情景画像に基づいて表示制御を行う請求項1または2に記載の車両用情報表示装置。
【請求項4】
前記表示制御部は、前記実情景画像特定部により得られる前記実情景画像を、運転者から見た情景と重なるように前記ウインドシールドに表示させる請求項3に記載の車両用情報表示装置。
【請求項5】
前記表示制御部は、前記模擬情景画像計算部により得られる前記模擬情景画像を、運転者から見た情景と重なるように前記ウインドシールドに表示させる請求項1ないし3のいずれか1項に記載の車両用情報表示装置。
【請求項6】
前記実情景画像または前記模擬情景画像を表示するか否かを選択する選択手段を備える請求項4または5に記載の車両用情報表示装置。
【請求項7】
前記模擬情景画像計算部は、車両の現在位置から前記模擬情景画像に含まれる建物までの距離を特定し、前記表示制御部は、当該距離が所定値以下である場合に前記建物情報を非表示とする請求項1ないし6のいずれか1項に記載の車両用情報表示装置。
【請求項8】
前記模擬情景画像計算部は、車両の現在位置から前記模擬情景画像に含まれる建物までの距離を特定し、前記表示制御部は、当該距離が所定値以上である場合に前記建物情報を非表示とする請求項1ないし7のいずれか1項に記載の車両用情報表示装置。
【請求項9】
前記模擬情景画像計算部は、車両の現在位置から前記模擬情景画像に含まれる建物までの距離を特定し、前記表示制御部は、当該距離が所定範囲内にある場合にのみ前記建物情報を表示させる請求項1ないし6のいずれか1項に記載の車両用情報表示装置。
【請求項10】
前記所定範囲または前記所定値を設定する設定手段を備える請求項7ないし9のいずれか1項に記載の車両用情報表示装置。
【請求項11】
前記表示制御部は、運転者から見て空となる前記ウインドシールドの領域に前記建物情報を表示させる請求項1ないし10のいずれか1項に記載の車両用情報表示装置。
【請求項12】
前記表示制御部は、前記建物情報を透過表示させる請求項1ないし11のいずれか1項に記載の車両用情報表示装置。
【請求項13】
前記表示制御部は、前記ウインドシールド外枠側を優先的に前記建物情報の表示位置とする請求項1ないし12のいずれか1項に記載の車両用情報表示装置。
【請求項14】
前記模擬情景画像計算部は、車両の現在位置から前記模擬情景画像に含まれる建物までの距離を特定し、前記表示制御部は、当該距離に応じて前記建物情報の詳細度を変化させる請求項1ないし13のいずれか1項に記載の車両用情報表示装置。
【請求項15】
前記表示制御部は、前記模擬情景画像に含まれる建物内の個別施設及びその階数に係る情報を前記建物情報に含めて表示させる請求項1ないし14のいずれか1項に記載の車両用情報表示装置。
【請求項16】
前記表示制御部は、前記模擬情景画像に含まれる建物が運転者から見て重なる場合に、近い側の建物に係る前記建物情報を優先的に表示させる請求項1ないし15のいずれか1項に記載の車両用情報表示装置。
【請求項17】
前記表示制御部は、前記建物情報の表示とともに、運転者から見て当該建物となる前記ウインドシールドの領域にその輪郭を強調する輪郭強調表示を表示させる請求項1ないし16のいずれか1項に記載の車両用情報表示装置。
【請求項18】
前記建物情報を表示するか否かを選択する選択手段を備える請求項1ないし17のいずれか1項に記載の車両用情報表示装置。
【請求項1】
3次元地図データを記憶する地図データ記憶手段と、
前記3次元地図データに含まれる建物に関する建物情報を記憶する建物情報記憶手段と、
車両の現在位置を検出する位置検出手段と、
車両の進行方位を検出する方位検出手段と、
車両の現在位置及び進行方位に基づき前記3次元地図データから運転者が見ていると想定される模擬情景画像を算出し、且つ、当該模擬情景画像に含まれる建物を特定する模擬情景画像計算部と、
前記模擬情景画像に含まれる建物に関する建物情報を前記建物情報記憶手段から取得する建物情報取得部と、
車両のウインドシールドに映像を表示するウインドシールド表示手段と、
前記模擬情景画像に含まれる建物に関する建物情報を、運転者から見て当該建物の近傍となる前記ウインドシールドの領域に表示するように前記ウインドシールド表示手段を制御する表示制御部と、
を備えることを特徴とする車両用情報表示装置。
【請求項2】
運転者の目を撮影する運転者撮像手段と、前記運転者撮像手段により得られる画像から運転者の視線方向を検出する視線方向検出部とを備え、
前記模擬情景画像計算部は、車両の現在位置及び進行方位、運転者の視線方向に基づき前記3次元地図データから運転者が見ていると想定される模擬情景画像を算出し、且つ、当該模擬情景画像に含まれる建物を特定する請求項1に記載の車両用情報表示装置。
【請求項3】
車外を撮影する車外撮像手段と、
前記視線方向検出部により得られる運転者の視線方向及び前記車外撮像手段により得られる画像から運転者が見ている実情景画像を特定する実情景画像特定部と、
前記模擬情景画像と前記実情景画像とを照合して該模擬情景画像の位置補正を行う情景画像照合部とを備え、
前記表示制御部は、該情景画像照合部により位置補正された前記模擬情景画像に基づいて表示制御を行う請求項1または2に記載の車両用情報表示装置。
【請求項4】
前記表示制御部は、前記実情景画像特定部により得られる前記実情景画像を、運転者から見た情景と重なるように前記ウインドシールドに表示させる請求項3に記載の車両用情報表示装置。
【請求項5】
前記表示制御部は、前記模擬情景画像計算部により得られる前記模擬情景画像を、運転者から見た情景と重なるように前記ウインドシールドに表示させる請求項1ないし3のいずれか1項に記載の車両用情報表示装置。
【請求項6】
前記実情景画像または前記模擬情景画像を表示するか否かを選択する選択手段を備える請求項4または5に記載の車両用情報表示装置。
【請求項7】
前記模擬情景画像計算部は、車両の現在位置から前記模擬情景画像に含まれる建物までの距離を特定し、前記表示制御部は、当該距離が所定値以下である場合に前記建物情報を非表示とする請求項1ないし6のいずれか1項に記載の車両用情報表示装置。
【請求項8】
前記模擬情景画像計算部は、車両の現在位置から前記模擬情景画像に含まれる建物までの距離を特定し、前記表示制御部は、当該距離が所定値以上である場合に前記建物情報を非表示とする請求項1ないし7のいずれか1項に記載の車両用情報表示装置。
【請求項9】
前記模擬情景画像計算部は、車両の現在位置から前記模擬情景画像に含まれる建物までの距離を特定し、前記表示制御部は、当該距離が所定範囲内にある場合にのみ前記建物情報を表示させる請求項1ないし6のいずれか1項に記載の車両用情報表示装置。
【請求項10】
前記所定範囲または前記所定値を設定する設定手段を備える請求項7ないし9のいずれか1項に記載の車両用情報表示装置。
【請求項11】
前記表示制御部は、運転者から見て空となる前記ウインドシールドの領域に前記建物情報を表示させる請求項1ないし10のいずれか1項に記載の車両用情報表示装置。
【請求項12】
前記表示制御部は、前記建物情報を透過表示させる請求項1ないし11のいずれか1項に記載の車両用情報表示装置。
【請求項13】
前記表示制御部は、前記ウインドシールド外枠側を優先的に前記建物情報の表示位置とする請求項1ないし12のいずれか1項に記載の車両用情報表示装置。
【請求項14】
前記模擬情景画像計算部は、車両の現在位置から前記模擬情景画像に含まれる建物までの距離を特定し、前記表示制御部は、当該距離に応じて前記建物情報の詳細度を変化させる請求項1ないし13のいずれか1項に記載の車両用情報表示装置。
【請求項15】
前記表示制御部は、前記模擬情景画像に含まれる建物内の個別施設及びその階数に係る情報を前記建物情報に含めて表示させる請求項1ないし14のいずれか1項に記載の車両用情報表示装置。
【請求項16】
前記表示制御部は、前記模擬情景画像に含まれる建物が運転者から見て重なる場合に、近い側の建物に係る前記建物情報を優先的に表示させる請求項1ないし15のいずれか1項に記載の車両用情報表示装置。
【請求項17】
前記表示制御部は、前記建物情報の表示とともに、運転者から見て当該建物となる前記ウインドシールドの領域にその輪郭を強調する輪郭強調表示を表示させる請求項1ないし16のいずれか1項に記載の車両用情報表示装置。
【請求項18】
前記建物情報を表示するか否かを選択する選択手段を備える請求項1ないし17のいずれか1項に記載の車両用情報表示装置。
【図1】


【図2】
【図3】
【図4】
【図8】
【図9】
【図10】
【図11】
【図12】
【図14】
【図5】
【図6】

【図7】
【図13】
【図2】
【図3】
【図4】
【図8】
【図9】
【図10】
【図11】
【図12】
【図14】
【図5】
【図6】
【図7】
【図13】
【公開番号】特開2006−242859(P2006−242859A)
【公開日】平成18年9月14日(2006.9.14)
【国際特許分類】
【出願番号】特願2005−61264(P2005−61264)
【出願日】平成17年3月4日(2005.3.4)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年9月14日(2006.9.14)
【国際特許分類】
【出願日】平成17年3月4日(2005.3.4)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]