
車両用支援システム
本発明は、車両の走行方向の外部空間を検出する少なくとも1つの監視ユニットが設けられており、監視される外部空間の走行路側方にそれぞれ1つずつ、早期注意線と車線マークを含む後期注意線とによって画された注意ゾーンが定義されている、車両用支援システムに関する。このシステムにはさらに監視ユニットからのデータを評価する評価ユニットが設けられており、本発明によれば、評価ユニットによって注意ゾーン内に定義された注意閾値を上回ったことが識別された場合、別のプランによるドライバーアダプティブ条件に依存して、音響・視覚・触覚警報またはステアリング介入のための注意信号が出力される。
これにより本発明の支援システムは、有利には、ドライバーの要求を取り入れていっそう快適な印象を与えることができ、公知の支援システムに比べて受容能力が高められ、経済性の高い製品となっている。

これにより本発明の支援システムは、有利には、ドライバーの要求を取り入れていっそう快適な印象を与えることができ、公知の支援システムに比べて受容能力が高められ、経済性の高い製品となっている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、外部空間、特に車両の走行方向の外部空間を検出する少なくとも1つの監視ユニットが設けられている、車両用支援システムに関する。
【0002】
インテリジェントドライバー支援システムADAS(Advanced Driver Assistance System)はこんにちおよび将来の車両で重要な位置を占めつつある。将来の車両では、例えばカメラシステムなどの監視ユニットが補助手段として用いられ、外部空間、例えば車両の走行方向の外部空間を検出するようになるはずである。ここで最初に公知となったシステムアプリケーションは車線識別手段に基づいている。これに類するものとして、特に音響警報、視覚警報および/または触覚警報を送出する車線逸脱警報装置LDW(Lane Departure Warning)や、車線保持のためのステアリング介入装置LK(Lane Keep)などが挙げられる。
【0003】
事故、特に郊外走行時の事故の大きな原因の1つは車線の逸脱である。これは例えば居眠り、不注意、または車両その他の対象物に気を取られたことなどによって発生する。車線逸脱警報は特にLDWシステムによって回避することができる。
【0004】
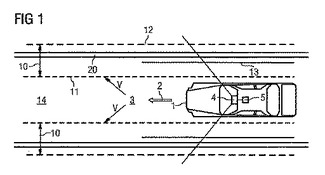
LDWシステムについては既にきわめて広汎なISO規格CD17361のドラフトが存在しており、その内容はこれからもほとんど変わらないものとすべきである。車輪が定義された注意ゾーン10いわゆる"warning zone"内にある場合、警報を出力しなければならないが、そうでない場合には警報を出力してはならない(図1を参照)。定義された注意ゾーン10は早期注意線11いわゆる"earliest warning line"と後期注意線12いわゆる"latest warning zone"とによって画される。注意ゾーン10内で警報を発する正確な時点は定義された注意閾値13いわゆる"warning threshold"によって定められる。定義された注意ゾーン間には警報の出力されないゾーンいわゆる"no warning zone"である車線14が存在している。
【0005】
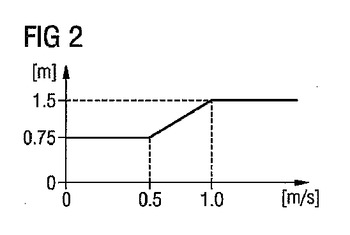
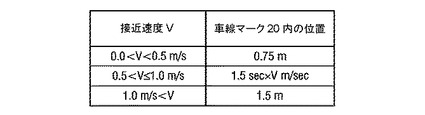
後期注意線12は自家用車両PDWでは車線マークいわゆる"lane boundary"の外側0.3mのところとなる。早期注意線11の位置は車両1の車線境界20への接近速度または逸脱速度("rate of departure")Vに依存して定められる。図2,図3にはそれぞれの位置が詳細に示されている。これは、Vが0.5m/sより小さいとき0.75mであり、Vが0.5m/s〜1m/sのとき0.75m〜1.5mのあいだで線形に上昇し、Vが1m/sより大きいとき1.5mである。
【0006】
ISO規格のドラフトには、注意閾値の位置を定義された注意ゾーン内でシフトする条件または警報を完全に抑圧する条件が挙げられている。
【0007】
警報は例えば、a)ドライバーがウィンカをセットした場合、b)ドライバーがブレーキペダルを踏んだ場合、c)ドライバーが回避や制動などの優先度の高いプラン(マヌーバー)を実行した場合、d)車両速度が所定の閾値、例えば市街領域でのエラーアラーム抑圧のための閾値17m/s=61.2kmを下回る場合、e)既に他の警報が出力されており、警報の多重を回避したい場合などに抑圧される。
【0008】
注意閾値13の位置は、ISOドラフトに準拠すれば、a)ドライバーの手動設定による場合、および/またはコーナーカット時の警報を回避したい場合に、定義された注意ゾーン10内でシフトされる。
【0009】
また当該のシステムはドライバーが全体としてオンオフすることができる。
【0010】
本発明の基礎とする課題は、前述の欠点を回避できる改善された支援システムを提供することである。特には支援システムの感度および受容能力を高める手段を提供することを目的とする。
【0011】
この課題は請求項1の特徴部分に記載の構成により解決される。
【0012】
有利な実施形態および実施態様は、単独でも相互に組み合わせても、特許請求の範囲の対象となる。
【0013】
本発明は、外部空間、例えば車両の走行方向の外部空間を検出する少なくとも1つの監視ユニットが設けられており、監視される外部空間の走行路側方にそれぞれ1つずつ注意ゾーンが定義されており、この注意ゾーンは早期注意線と車線マークまたは車線境界を含む後期注意線とによって画されている、車両用支援システムに関する。このシステムにはさらに監視ユニットから伝送されてくるデータを評価する評価ユニットが設けられており、この評価ユニットによって注意ゾーン内に定義された注意閾値を上回ったことが識別された場合、音響警報、視覚警報および/または触覚警報および/またはステアリング介入のための注意信号が出力される。
【0014】
本発明の支援システムは、冒頭に言及した形式のシステムから出発して、別のプランによるドライバーアダプティブ条件に依存して音響警報、視覚警報および/または触覚警報および/またはステアリング介入のための注意信号を出力することを特徴とする。
【0015】
プランに応じたドライバーアダプティブ条件に依存する警報出力および/またはステアリング介入は、有利には特にこの種のシステムの受容能力を高める。なぜならドライバーの要求を取り入れ、ドライバーに対していっそう快適な印象を与えることができるからである。
【0016】
有利には、例えば注意信号の出力はドライバーの設定した発進後の所定の時間範囲で抑圧される。経験上、例えば走行時間の初期のうちから何度も警報が与えられると、注意深いドライバーは煩わしく思うはずである。たいていは或る程度の時間が経過してはじめてドライバーの疲労が見られることになる。
【0017】
これに代えてまたはこれに加えて、警報出力は日時に依存する所定の範囲においても抑圧される。例えば、本発明の支援システムは夕方17:00から朝7:00までのあいだではただちに警報を発するが、朝7:00から夕方17:00までのあいだでは発進後1h経過してから警報を発する。ここでの時間範囲はメーカの作業者のみならずユーザもアダプティブに設定することができる。
【0018】
本発明によれば、注意閾値の位置が定義された初期位置から時間の経過に応じて早期注意線の方向へシフトされる。特に、注意閾値は、設定可能な時間範囲の後にシフトされるか、および/または設定された時間範囲にわたって連続的に許容注意ゾーン内の外側の位置から早期注意線の方向へシフトされる。有利には、注意閾値の最終位置はドライバーまたは車両メーカが設定することのできる定義された閾値位置(デフォルト位置)である。
【0019】
有利には、警報を抑圧するための時間範囲または注意閾値の位置をシフトするための時間範囲は天候および/または照明特性に依存して変化する。
【0020】
監視ユニットがカメラシステムを含む場合、日時および/または照明制御に基づいて設定された露光時間、増幅度および/または特性マップの形状などのカメラパラメータに基づいて天候が判別される。この判別手段は例えば機器内にテーブルの形態で格納することができる。日時を考慮したうえで露光時間が長いと評価された場合、つまり光特性が"暗"であった場合には、注意閾値は早期注意線の方向へシフトされ、これにより感度が高められる。
【0021】
有利には、注意閾値の初期位置および/または位置変化量もカレンダー日に依存してシフトされる。
【0022】
これに代えてまたはこれに加えて、特に注意閾値の位置は、ワイパレバーの作動またはレインセンサの信号に依存してシフトされる。こんにちの車両でのこうした設定または閾値は車両のCANバスを介してやり取りされ、これにより有利には支援システムの感度を高めることができる。
【0023】
本発明の有利な実施形態では、注意閾値の上方超過の回数が例えば1minごとにまたは他の定義された時間単位ごとに測定され、注意信号は第2の閾値が上方超過されてはじめて、例えば1min当たり2回の上方超過があってはじめて出力される。
【0024】
これに代えてまたはこれに加えて、注意閾値または第2の閾値が上方超過されるたびに、注意閾値の位置が早期注意線すなわち第1の注意線の方向へシフトされる。これにより有利には注意閾値が"より感"に設定される。
【0025】
本発明の別の有利な実施形態によれば、注意閾値の初期位置および/または位置変化量は定義されたドライバーへ個別に適合可能である。例えば、設定可能な時間範囲にわたって車線上の車両位置が測定され、統計的に評価されて、そこから有利にはドライバーの典型的なふるまいに対する推論が導出される。ドライバーに応じて注意閾値は"より感"または"より不感"に設定することができる。車線の中央を走行することの多いドライバーについては、揺れながら走行することの多いドライバーよりも閾値を"より感"に設定する。有利には、前述の適合化は、同一のドライバーによる種々の状態を検出するため、基本的に所定の限界値内で行われる。例を挙げれば、同一のドライバーであっても、朝には新鮮な気分で正確に車線を走行できるが、夕方には疲労して車線の中央から外れても反応に時間がかかることがある。また前述の適合化はドライバーごとに個別に行うこともできる。個別のデータ値がシステム内に格納されており、ドライバーのID識別の後にドライバー固有のパラメータ化が行われる。ID識別は例えば利用されるキーまたは指紋を介して、および/または容貌識別により行われる。
【0026】
本発明の有利な実施形態では、注意閾値は走行された車線の幅に依存して定められる。車線が狭い場合には注意閾値は外側に、つまり"より不感"に配置され、車線が広い場合には内側に、つまり"より感"に配置される。
【0027】
本発明の有利な実施形態では、注意閾値は道路のタイプに依存して定められる。道路が対向交通のある街道である場合には、システムは車線の左側で閾値を"より感"に設定する。また道路が複数車線のある高速道路である場合または同一の走行方向の隣接車線が識別されている場合には、システムは"より不感"に設定される。このためにはカメラを用いた付加的な車両識別手段が必要となる。
【0028】
本発明の別の有利な実施形態では、車両の側方領域、例えば左方のみ、右方のみ、または左方および右方を監視する別のカメラまたは別のセンサが設けられている。当該のカメラまたはセンサのレンジはブラインドスポットに相応する約9mまたはそれ以上であり、有利には150mまでである。自車両の近傍に少なくとも1つの車両が検出された場合、または自車両の位置する車線または他の車線で後方から高速で接近する車両があることが検出された場合には、注意閾値は"より感"に設定され、有利には危険に適合するようにパラメータ化が行われる。
【0029】
別の有利な実施形態では、前方走行車両、この前方走行車両と自車両との間隔およびこの前方走行車両と自車両との相対速度が識別される。これにより追い越し過程での警報が抑圧される。これは、他のシナリオ、例えば追い越し過程に続く車線復帰過程においても有効である。
【0030】
本発明の有利な実施形態では、他のセンサによって検出されたドライバーの疲労のサインが評価される。ドライバーの疲労が識別された場合には、システムは"より感"に設定される。公知の疲労識別手段としては、まばたきを識別する室内カメラや、アクセルペダル・クラッチペダル・ブレーキペダル・ステアリングホイールなどの運動の頻度を検出するセンサが挙げられる。
【0031】
本発明の有利な実施形態では、LDWシステムのストラテジに則した構成に応じて、ハンズフリートーク装置が作動されている場合、ドライバーが居眠りしているわけではないので、システムが完全にオフにされるか、または音響警報のみがオフにされるか、または通話中ドライバーに気づかれない可能性があるため意図的に視覚警報のみが出力される。
【0032】
電話の操作中であるということのほか、一時的に警報を抑圧すべき理由として、車載コンピュータ、ラジオ、エアコンの操作または他の複雑な操作過程が挙げられる。すなわちドライバーの居眠りの可能性が低いことがわかっている状況では警報が抑圧される。
【0033】
本発明の別の有利な実施形態では、カーブでの警報がコーナーカットに対するエラー警報を回避するために基本的に抑圧および/または修正される。これはカーブ走行ではドライバーに対して基本的に高度な注意が要求されるためである。例えば、前方に存在するカーブの曲率が識別され、走行ダイナミクスモデルにより、車両がその時点の速度で当該のカーブを通過できるか否かが推定される。特に危険な場合には、注意閾値に達する前に警報が出力されるか、および/または車両のステアリング、ブレーキングなどへの介入制御が行われる。
【0034】
従来の支援システムに比べて、本発明の支援システムはドライバーアダプティブ条件を考慮してシステムの受容能力を高めることにより経済性の高い製品が得られるという重要な利点を有する。
【0035】
本発明のさらなる詳細および利点を図示の実施例に則して以下に詳細に説明する。これらの図面のうち、図1には本発明の車両用支援システムを搭載した車両とその周囲とが示されており、図2には車両の接近速度に依存した車線境界に対する早期注意線の種々の間隔が示されており、図3には図2に相応するパラメータの表が示されている。
【0036】
図1には車両1およびその周囲が示されている。当該の車両には本発明の支援システムが搭載されている。支援システムは、外部空間3、特に車両1の走行方向2の外部空間を検出する少なくとも1つの監視ユニット4を含む。監視ユニット4として有利には2D撮像センサまたは3D撮像センサ、例えばモノカメラ、ステレオカメラ、ラインカメラ、超音波センサ、レーダーセンサおよび/またはLIDARセンサその他を備えたユニットが提供される。監視されている車両1の外部空間3では走行路14の側方に1つずつ注意ゾーン10が定義されている。この注意ゾーンは早期注意線11と車線マークまたは車線境界20を含む後期注意線12とによって画されている。
【0037】
以下に本発明の原理を監視ユニット4に則して説明する。監視ユニット4は画像検出ユニットであり、有利にはカメラである。このカメラは例えば車両1のルーフ領域の図示されていないルームミラー脚部の近傍に組み込まれており、水平方向の開放角約50°、垂直方向の開放角約30°である。
【0038】
画像処理コンピュータ(BVコンピュータ)は中央の評価ユニット5の一部であってもよいし、カメラ4のケーシング内に完全にまたは部分的に組み込まれていてもよい。BVコンピュータを介してカメラセンサデータが評価され、例えば車線マーク20が検出され、車線14に対する車両1の位置および相対角度および車線14のカーブ曲率が計算される。BVコンピュータは例えばCANバスを介して車両に接続されており、本発明によれば、速度、ブレーキ信号、ウィンカおよびステアリング信号の値や、ブラインドスポットカメラおよびACCレーダーその他のセンサの評価結果などを送出する。
【0039】
評価ユニット5を介して注意ゾーン10内に存在する注意閾値13の上方超過が識別されると、評価ユニット5は監視ユニット4から伝送されたデータに対して注意信号を出力する。注意閾値は感度に関して可変である。
【0040】
従属請求項に記載されているように、感度は種々のパラメータ、例えば注意ゾーン10の大きさに依存して変化する。注意ゾーンの大きさは状況に応じた注意線11,12の位置に依存して変化する。
【0041】
図2には車両1の接近速度Vに依存して変化する車線境界20から早期注意線11までの間隔が示されている。図3には図2に相応するパラメータの表が示されている。
【0042】
本発明によれば、警報および/またはステアリング介入のための注意信号は、プランに応じたドライバーアダプティブ条件に依存する場合にのみ出力される。これにより本発明の支援システムでは有利にドライバーの要求が考慮され、ドライバーにいっそう快適な印象を与えることができる。
【0043】
従来の支援システムに比べて、本発明の支援システムはドライバーアダプティブ条件を考慮してシステムの受容能力を高めることにより経済性の高い製品が得られるという重要な利点を有する。
【図面の簡単な説明】
【0044】
【図1】本発明の車両用支援システムを搭載した車両とその周囲とを示す図である。
【図2】車両の接近速度に依存した車線境界に対する早期注意線の種々の間隔を示す図である。
【図3】図2に相応するパラメータの表である。
【技術分野】
【0001】
本発明は、外部空間、特に車両の走行方向の外部空間を検出する少なくとも1つの監視ユニットが設けられている、車両用支援システムに関する。
【0002】
インテリジェントドライバー支援システムADAS(Advanced Driver Assistance System)はこんにちおよび将来の車両で重要な位置を占めつつある。将来の車両では、例えばカメラシステムなどの監視ユニットが補助手段として用いられ、外部空間、例えば車両の走行方向の外部空間を検出するようになるはずである。ここで最初に公知となったシステムアプリケーションは車線識別手段に基づいている。これに類するものとして、特に音響警報、視覚警報および/または触覚警報を送出する車線逸脱警報装置LDW(Lane Departure Warning)や、車線保持のためのステアリング介入装置LK(Lane Keep)などが挙げられる。
【0003】
事故、特に郊外走行時の事故の大きな原因の1つは車線の逸脱である。これは例えば居眠り、不注意、または車両その他の対象物に気を取られたことなどによって発生する。車線逸脱警報は特にLDWシステムによって回避することができる。
【0004】
LDWシステムについては既にきわめて広汎なISO規格CD17361のドラフトが存在しており、その内容はこれからもほとんど変わらないものとすべきである。車輪が定義された注意ゾーン10いわゆる"warning zone"内にある場合、警報を出力しなければならないが、そうでない場合には警報を出力してはならない(図1を参照)。定義された注意ゾーン10は早期注意線11いわゆる"earliest warning line"と後期注意線12いわゆる"latest warning zone"とによって画される。注意ゾーン10内で警報を発する正確な時点は定義された注意閾値13いわゆる"warning threshold"によって定められる。定義された注意ゾーン間には警報の出力されないゾーンいわゆる"no warning zone"である車線14が存在している。
【0005】
後期注意線12は自家用車両PDWでは車線マークいわゆる"lane boundary"の外側0.3mのところとなる。早期注意線11の位置は車両1の車線境界20への接近速度または逸脱速度("rate of departure")Vに依存して定められる。図2,図3にはそれぞれの位置が詳細に示されている。これは、Vが0.5m/sより小さいとき0.75mであり、Vが0.5m/s〜1m/sのとき0.75m〜1.5mのあいだで線形に上昇し、Vが1m/sより大きいとき1.5mである。
【0006】
ISO規格のドラフトには、注意閾値の位置を定義された注意ゾーン内でシフトする条件または警報を完全に抑圧する条件が挙げられている。
【0007】
警報は例えば、a)ドライバーがウィンカをセットした場合、b)ドライバーがブレーキペダルを踏んだ場合、c)ドライバーが回避や制動などの優先度の高いプラン(マヌーバー)を実行した場合、d)車両速度が所定の閾値、例えば市街領域でのエラーアラーム抑圧のための閾値17m/s=61.2kmを下回る場合、e)既に他の警報が出力されており、警報の多重を回避したい場合などに抑圧される。
【0008】
注意閾値13の位置は、ISOドラフトに準拠すれば、a)ドライバーの手動設定による場合、および/またはコーナーカット時の警報を回避したい場合に、定義された注意ゾーン10内でシフトされる。
【0009】
また当該のシステムはドライバーが全体としてオンオフすることができる。
【0010】
本発明の基礎とする課題は、前述の欠点を回避できる改善された支援システムを提供することである。特には支援システムの感度および受容能力を高める手段を提供することを目的とする。
【0011】
この課題は請求項1の特徴部分に記載の構成により解決される。
【0012】
有利な実施形態および実施態様は、単独でも相互に組み合わせても、特許請求の範囲の対象となる。
【0013】
本発明は、外部空間、例えば車両の走行方向の外部空間を検出する少なくとも1つの監視ユニットが設けられており、監視される外部空間の走行路側方にそれぞれ1つずつ注意ゾーンが定義されており、この注意ゾーンは早期注意線と車線マークまたは車線境界を含む後期注意線とによって画されている、車両用支援システムに関する。このシステムにはさらに監視ユニットから伝送されてくるデータを評価する評価ユニットが設けられており、この評価ユニットによって注意ゾーン内に定義された注意閾値を上回ったことが識別された場合、音響警報、視覚警報および/または触覚警報および/またはステアリング介入のための注意信号が出力される。
【0014】
本発明の支援システムは、冒頭に言及した形式のシステムから出発して、別のプランによるドライバーアダプティブ条件に依存して音響警報、視覚警報および/または触覚警報および/またはステアリング介入のための注意信号を出力することを特徴とする。
【0015】
プランに応じたドライバーアダプティブ条件に依存する警報出力および/またはステアリング介入は、有利には特にこの種のシステムの受容能力を高める。なぜならドライバーの要求を取り入れ、ドライバーに対していっそう快適な印象を与えることができるからである。
【0016】
有利には、例えば注意信号の出力はドライバーの設定した発進後の所定の時間範囲で抑圧される。経験上、例えば走行時間の初期のうちから何度も警報が与えられると、注意深いドライバーは煩わしく思うはずである。たいていは或る程度の時間が経過してはじめてドライバーの疲労が見られることになる。
【0017】
これに代えてまたはこれに加えて、警報出力は日時に依存する所定の範囲においても抑圧される。例えば、本発明の支援システムは夕方17:00から朝7:00までのあいだではただちに警報を発するが、朝7:00から夕方17:00までのあいだでは発進後1h経過してから警報を発する。ここでの時間範囲はメーカの作業者のみならずユーザもアダプティブに設定することができる。
【0018】
本発明によれば、注意閾値の位置が定義された初期位置から時間の経過に応じて早期注意線の方向へシフトされる。特に、注意閾値は、設定可能な時間範囲の後にシフトされるか、および/または設定された時間範囲にわたって連続的に許容注意ゾーン内の外側の位置から早期注意線の方向へシフトされる。有利には、注意閾値の最終位置はドライバーまたは車両メーカが設定することのできる定義された閾値位置(デフォルト位置)である。
【0019】
有利には、警報を抑圧するための時間範囲または注意閾値の位置をシフトするための時間範囲は天候および/または照明特性に依存して変化する。
【0020】
監視ユニットがカメラシステムを含む場合、日時および/または照明制御に基づいて設定された露光時間、増幅度および/または特性マップの形状などのカメラパラメータに基づいて天候が判別される。この判別手段は例えば機器内にテーブルの形態で格納することができる。日時を考慮したうえで露光時間が長いと評価された場合、つまり光特性が"暗"であった場合には、注意閾値は早期注意線の方向へシフトされ、これにより感度が高められる。
【0021】
有利には、注意閾値の初期位置および/または位置変化量もカレンダー日に依存してシフトされる。
【0022】
これに代えてまたはこれに加えて、特に注意閾値の位置は、ワイパレバーの作動またはレインセンサの信号に依存してシフトされる。こんにちの車両でのこうした設定または閾値は車両のCANバスを介してやり取りされ、これにより有利には支援システムの感度を高めることができる。
【0023】
本発明の有利な実施形態では、注意閾値の上方超過の回数が例えば1minごとにまたは他の定義された時間単位ごとに測定され、注意信号は第2の閾値が上方超過されてはじめて、例えば1min当たり2回の上方超過があってはじめて出力される。
【0024】
これに代えてまたはこれに加えて、注意閾値または第2の閾値が上方超過されるたびに、注意閾値の位置が早期注意線すなわち第1の注意線の方向へシフトされる。これにより有利には注意閾値が"より感"に設定される。
【0025】
本発明の別の有利な実施形態によれば、注意閾値の初期位置および/または位置変化量は定義されたドライバーへ個別に適合可能である。例えば、設定可能な時間範囲にわたって車線上の車両位置が測定され、統計的に評価されて、そこから有利にはドライバーの典型的なふるまいに対する推論が導出される。ドライバーに応じて注意閾値は"より感"または"より不感"に設定することができる。車線の中央を走行することの多いドライバーについては、揺れながら走行することの多いドライバーよりも閾値を"より感"に設定する。有利には、前述の適合化は、同一のドライバーによる種々の状態を検出するため、基本的に所定の限界値内で行われる。例を挙げれば、同一のドライバーであっても、朝には新鮮な気分で正確に車線を走行できるが、夕方には疲労して車線の中央から外れても反応に時間がかかることがある。また前述の適合化はドライバーごとに個別に行うこともできる。個別のデータ値がシステム内に格納されており、ドライバーのID識別の後にドライバー固有のパラメータ化が行われる。ID識別は例えば利用されるキーまたは指紋を介して、および/または容貌識別により行われる。
【0026】
本発明の有利な実施形態では、注意閾値は走行された車線の幅に依存して定められる。車線が狭い場合には注意閾値は外側に、つまり"より不感"に配置され、車線が広い場合には内側に、つまり"より感"に配置される。
【0027】
本発明の有利な実施形態では、注意閾値は道路のタイプに依存して定められる。道路が対向交通のある街道である場合には、システムは車線の左側で閾値を"より感"に設定する。また道路が複数車線のある高速道路である場合または同一の走行方向の隣接車線が識別されている場合には、システムは"より不感"に設定される。このためにはカメラを用いた付加的な車両識別手段が必要となる。
【0028】
本発明の別の有利な実施形態では、車両の側方領域、例えば左方のみ、右方のみ、または左方および右方を監視する別のカメラまたは別のセンサが設けられている。当該のカメラまたはセンサのレンジはブラインドスポットに相応する約9mまたはそれ以上であり、有利には150mまでである。自車両の近傍に少なくとも1つの車両が検出された場合、または自車両の位置する車線または他の車線で後方から高速で接近する車両があることが検出された場合には、注意閾値は"より感"に設定され、有利には危険に適合するようにパラメータ化が行われる。
【0029】
別の有利な実施形態では、前方走行車両、この前方走行車両と自車両との間隔およびこの前方走行車両と自車両との相対速度が識別される。これにより追い越し過程での警報が抑圧される。これは、他のシナリオ、例えば追い越し過程に続く車線復帰過程においても有効である。
【0030】
本発明の有利な実施形態では、他のセンサによって検出されたドライバーの疲労のサインが評価される。ドライバーの疲労が識別された場合には、システムは"より感"に設定される。公知の疲労識別手段としては、まばたきを識別する室内カメラや、アクセルペダル・クラッチペダル・ブレーキペダル・ステアリングホイールなどの運動の頻度を検出するセンサが挙げられる。
【0031】
本発明の有利な実施形態では、LDWシステムのストラテジに則した構成に応じて、ハンズフリートーク装置が作動されている場合、ドライバーが居眠りしているわけではないので、システムが完全にオフにされるか、または音響警報のみがオフにされるか、または通話中ドライバーに気づかれない可能性があるため意図的に視覚警報のみが出力される。
【0032】
電話の操作中であるということのほか、一時的に警報を抑圧すべき理由として、車載コンピュータ、ラジオ、エアコンの操作または他の複雑な操作過程が挙げられる。すなわちドライバーの居眠りの可能性が低いことがわかっている状況では警報が抑圧される。
【0033】
本発明の別の有利な実施形態では、カーブでの警報がコーナーカットに対するエラー警報を回避するために基本的に抑圧および/または修正される。これはカーブ走行ではドライバーに対して基本的に高度な注意が要求されるためである。例えば、前方に存在するカーブの曲率が識別され、走行ダイナミクスモデルにより、車両がその時点の速度で当該のカーブを通過できるか否かが推定される。特に危険な場合には、注意閾値に達する前に警報が出力されるか、および/または車両のステアリング、ブレーキングなどへの介入制御が行われる。
【0034】
従来の支援システムに比べて、本発明の支援システムはドライバーアダプティブ条件を考慮してシステムの受容能力を高めることにより経済性の高い製品が得られるという重要な利点を有する。
【0035】
本発明のさらなる詳細および利点を図示の実施例に則して以下に詳細に説明する。これらの図面のうち、図1には本発明の車両用支援システムを搭載した車両とその周囲とが示されており、図2には車両の接近速度に依存した車線境界に対する早期注意線の種々の間隔が示されており、図3には図2に相応するパラメータの表が示されている。
【0036】
図1には車両1およびその周囲が示されている。当該の車両には本発明の支援システムが搭載されている。支援システムは、外部空間3、特に車両1の走行方向2の外部空間を検出する少なくとも1つの監視ユニット4を含む。監視ユニット4として有利には2D撮像センサまたは3D撮像センサ、例えばモノカメラ、ステレオカメラ、ラインカメラ、超音波センサ、レーダーセンサおよび/またはLIDARセンサその他を備えたユニットが提供される。監視されている車両1の外部空間3では走行路14の側方に1つずつ注意ゾーン10が定義されている。この注意ゾーンは早期注意線11と車線マークまたは車線境界20を含む後期注意線12とによって画されている。
【0037】
以下に本発明の原理を監視ユニット4に則して説明する。監視ユニット4は画像検出ユニットであり、有利にはカメラである。このカメラは例えば車両1のルーフ領域の図示されていないルームミラー脚部の近傍に組み込まれており、水平方向の開放角約50°、垂直方向の開放角約30°である。
【0038】
画像処理コンピュータ(BVコンピュータ)は中央の評価ユニット5の一部であってもよいし、カメラ4のケーシング内に完全にまたは部分的に組み込まれていてもよい。BVコンピュータを介してカメラセンサデータが評価され、例えば車線マーク20が検出され、車線14に対する車両1の位置および相対角度および車線14のカーブ曲率が計算される。BVコンピュータは例えばCANバスを介して車両に接続されており、本発明によれば、速度、ブレーキ信号、ウィンカおよびステアリング信号の値や、ブラインドスポットカメラおよびACCレーダーその他のセンサの評価結果などを送出する。
【0039】
評価ユニット5を介して注意ゾーン10内に存在する注意閾値13の上方超過が識別されると、評価ユニット5は監視ユニット4から伝送されたデータに対して注意信号を出力する。注意閾値は感度に関して可変である。
【0040】
従属請求項に記載されているように、感度は種々のパラメータ、例えば注意ゾーン10の大きさに依存して変化する。注意ゾーンの大きさは状況に応じた注意線11,12の位置に依存して変化する。
【0041】
図2には車両1の接近速度Vに依存して変化する車線境界20から早期注意線11までの間隔が示されている。図3には図2に相応するパラメータの表が示されている。
【0042】
本発明によれば、警報および/またはステアリング介入のための注意信号は、プランに応じたドライバーアダプティブ条件に依存する場合にのみ出力される。これにより本発明の支援システムでは有利にドライバーの要求が考慮され、ドライバーにいっそう快適な印象を与えることができる。
【0043】
従来の支援システムに比べて、本発明の支援システムはドライバーアダプティブ条件を考慮してシステムの受容能力を高めることにより経済性の高い製品が得られるという重要な利点を有する。
【図面の簡単な説明】
【0044】
【図1】本発明の車両用支援システムを搭載した車両とその周囲とを示す図である。
【図2】車両の接近速度に依存した車線境界に対する早期注意線の種々の間隔を示す図である。
【図3】図2に相応するパラメータの表である。
【特許請求の範囲】
【請求項1】
外部空間(3)、例えば車両(1)の走行方向(2)の外部空間を検出する少なくとも1つの監視ユニット(4)が設けられており、監視される外部空間(3)の走行路(14)側方にそれぞれ1つずつ注意ゾーン(10)が定義されており、該注意ゾーンは早期注意線(11)と車線マークまたは車線境界(20)を含む後期注意線(12)とによって画されている、
車両用支援システムにおいて、
さらに監視ユニット(4)から伝送されてくるデータを評価する評価ユニット(5)が設けられており、
該評価ユニットによって定義された注意ゾーン(10)内の注意閾値(13)を上回ったことが識別された場合、別のプランに応じたドライバーアダプティブ条件に依存して音響警報、視覚警報および/または触覚警報および/またはステアリング介入のための注意信号が出力される
ことを特徴とする車両用支援システム。
【請求項2】
注意信号の出力はドライバーによって設定可能な発進後の所定の時間範囲において抑圧される、請求項1記載のシステム。
【請求項3】
注意信号の出力は日時に依存する時間範囲において抑圧される、請求項1または2記載のシステム。
【請求項4】
注意閾値(13)の位置が定義された初期位置から時間の経過に応じて早期注意線(11)の方向へシフトされる、請求項1から3までのいずれか1項記載のシステム。
【請求項5】
注意閾値の位置は設定可能な時間範囲の経過後にシフトされる、請求項4記載のシステム。
【請求項6】
注意閾値(13)の位置は設定された時間範囲にわたって連続的にシフトされる、請求項5または6記載のシステム。
【請求項7】
注意閾値の最終位置はドライバーまたは車両メーカが設定することのできる定義された閾値位置である、請求項4から6までのいずれか1項記載のシステム。
【請求項8】
警報を抑圧するための時間範囲または注意閾値の位置をシフトするための時間範囲は天候および/または照明特性に依存して変化する、請求項1から7までのいずれか1項記載のシステム。
【請求項9】
監視ユニット(5)は有利にはカメラシステムを含み、該カメラシステムにおいて日時および/または照明制御に基づいて設定された露光時間、増幅度および/または特性マップの形状などのカメラパラメータに基づいて天候が判別される、請求項8記載のシステム。
【請求項10】
注意閾値の初期位置および/または位置変化量はカレンダー日に依存してシフトされる、請求項4から9までのいずれか1項記載のシステム。
【請求項11】
注意閾値の位置はワイパレバーの作動またはレインセンサの信号に依存してシフトされる、請求項4から10までのいずれか1項記載のシステム。
【請求項12】
注意閾値の上方超過の回数が例えば1minごとにまたは他の定義された時間単位ごとに測定され、注意信号は第2の閾値が上方超過されてはじめて出力される、請求項1から11までのいずれか1項記載のシステム。
【請求項13】
注意閾値または第2の閾値が上方超過されるたびに、注意閾値の位置が早期注意線の方向へシフトされる、請求項1から12までのいずれか1項記載のシステム。
【請求項14】
注意閾値の位置は定義されたドライバーへ個別に適合可能である、請求項1から13までのいずれか1項記載のシステム。
【請求項15】
設定可能な時間範囲にわたって車線上の車両位置が測定され、統計的に評価されてドライバーの典型的なふるまいに対する推論が導出され、該推論に依存して注意閾値の初期位置および/または位置変化量が設定される、請求項14記載のシステム。
【請求項16】
個別のデータ値がメモリに格納されており、ドライバーのID識別の後にドライバー固有のパラメータ化が行われる、請求項14または15記載のシステム。
【請求項17】
ドライバーのID識別は利用されるキーまたは指紋を介して、および/または容貌識別により行われる、請求項16記載のシステム。
【請求項18】
注意閾値の初期位置は走行している車線の幅に依存して定められる、請求項1から17までのいずれか1項記載のシステム。
【請求項19】
注意閾値の初期位置は走行している道路のタイプに依存して定められる、請求項1から18までのいずれか1項記載のシステム。
【請求項20】
車両の側方領域を監視する別のカメラまたは別のセンサが設けられており、監視結果に依存して注意閾値の位置が変更される、請求項1から19までのいずれか1項記載のシステム。
【請求項21】
前方走行車両、該前方走行車両と自車両との間隔および/または該前方走行車両と自車両との相対速度が識別される、請求項1から20までのいずれか1項記載のシステム。
【請求項22】
注意信号の出力は追い越し過程および/または自車両の車線復帰過程が識別された場合に抑圧される、請求項21記載のシステム。
【請求項23】
ドライバーの疲労のサインを検出するセンサが設けられており、該サインに依存して注意閾値の位置が変更されるかおよび/または警報が出力される、請求項1から22までのいずれか1項記載のシステム。
【請求項24】
ハンズフリートーク装置が作動されている場合に音響警報による示唆のための注意信号が抑圧される、請求項1から23までのいずれか1項記載のシステム。
【請求項25】
ハンズフリートーク装置が作動されている場合には視覚警報のための注意信号のみが出力される、請求項1から24までのいずれか1項記載のシステム。
【請求項26】
電話、車載コンピュータ、ラジオ、エアコンの操作または他の複雑な操作過程が識別された場合、警報の出力が抑圧される、請求項1から25までのいずれか1項記載のシステム。
【請求項27】
前方に存在するカーブの曲率が識別されるかおよび/または走行ダイナミクスモデルにより推定され、車両のカーブ走行が識別された場合に、警報の出力が抑圧される、請求項1から26までのいずれか1項記載のシステム。
【請求項1】
外部空間(3)、例えば車両(1)の走行方向(2)の外部空間を検出する少なくとも1つの監視ユニット(4)が設けられており、監視される外部空間(3)の走行路(14)側方にそれぞれ1つずつ注意ゾーン(10)が定義されており、該注意ゾーンは早期注意線(11)と車線マークまたは車線境界(20)を含む後期注意線(12)とによって画されている、
車両用支援システムにおいて、
さらに監視ユニット(4)から伝送されてくるデータを評価する評価ユニット(5)が設けられており、
該評価ユニットによって定義された注意ゾーン(10)内の注意閾値(13)を上回ったことが識別された場合、別のプランに応じたドライバーアダプティブ条件に依存して音響警報、視覚警報および/または触覚警報および/またはステアリング介入のための注意信号が出力される
ことを特徴とする車両用支援システム。
【請求項2】
注意信号の出力はドライバーによって設定可能な発進後の所定の時間範囲において抑圧される、請求項1記載のシステム。
【請求項3】
注意信号の出力は日時に依存する時間範囲において抑圧される、請求項1または2記載のシステム。
【請求項4】
注意閾値(13)の位置が定義された初期位置から時間の経過に応じて早期注意線(11)の方向へシフトされる、請求項1から3までのいずれか1項記載のシステム。
【請求項5】
注意閾値の位置は設定可能な時間範囲の経過後にシフトされる、請求項4記載のシステム。
【請求項6】
注意閾値(13)の位置は設定された時間範囲にわたって連続的にシフトされる、請求項5または6記載のシステム。
【請求項7】
注意閾値の最終位置はドライバーまたは車両メーカが設定することのできる定義された閾値位置である、請求項4から6までのいずれか1項記載のシステム。
【請求項8】
警報を抑圧するための時間範囲または注意閾値の位置をシフトするための時間範囲は天候および/または照明特性に依存して変化する、請求項1から7までのいずれか1項記載のシステム。
【請求項9】
監視ユニット(5)は有利にはカメラシステムを含み、該カメラシステムにおいて日時および/または照明制御に基づいて設定された露光時間、増幅度および/または特性マップの形状などのカメラパラメータに基づいて天候が判別される、請求項8記載のシステム。
【請求項10】
注意閾値の初期位置および/または位置変化量はカレンダー日に依存してシフトされる、請求項4から9までのいずれか1項記載のシステム。
【請求項11】
注意閾値の位置はワイパレバーの作動またはレインセンサの信号に依存してシフトされる、請求項4から10までのいずれか1項記載のシステム。
【請求項12】
注意閾値の上方超過の回数が例えば1minごとにまたは他の定義された時間単位ごとに測定され、注意信号は第2の閾値が上方超過されてはじめて出力される、請求項1から11までのいずれか1項記載のシステム。
【請求項13】
注意閾値または第2の閾値が上方超過されるたびに、注意閾値の位置が早期注意線の方向へシフトされる、請求項1から12までのいずれか1項記載のシステム。
【請求項14】
注意閾値の位置は定義されたドライバーへ個別に適合可能である、請求項1から13までのいずれか1項記載のシステム。
【請求項15】
設定可能な時間範囲にわたって車線上の車両位置が測定され、統計的に評価されてドライバーの典型的なふるまいに対する推論が導出され、該推論に依存して注意閾値の初期位置および/または位置変化量が設定される、請求項14記載のシステム。
【請求項16】
個別のデータ値がメモリに格納されており、ドライバーのID識別の後にドライバー固有のパラメータ化が行われる、請求項14または15記載のシステム。
【請求項17】
ドライバーのID識別は利用されるキーまたは指紋を介して、および/または容貌識別により行われる、請求項16記載のシステム。
【請求項18】
注意閾値の初期位置は走行している車線の幅に依存して定められる、請求項1から17までのいずれか1項記載のシステム。
【請求項19】
注意閾値の初期位置は走行している道路のタイプに依存して定められる、請求項1から18までのいずれか1項記載のシステム。
【請求項20】
車両の側方領域を監視する別のカメラまたは別のセンサが設けられており、監視結果に依存して注意閾値の位置が変更される、請求項1から19までのいずれか1項記載のシステム。
【請求項21】
前方走行車両、該前方走行車両と自車両との間隔および/または該前方走行車両と自車両との相対速度が識別される、請求項1から20までのいずれか1項記載のシステム。
【請求項22】
注意信号の出力は追い越し過程および/または自車両の車線復帰過程が識別された場合に抑圧される、請求項21記載のシステム。
【請求項23】
ドライバーの疲労のサインを検出するセンサが設けられており、該サインに依存して注意閾値の位置が変更されるかおよび/または警報が出力される、請求項1から22までのいずれか1項記載のシステム。
【請求項24】
ハンズフリートーク装置が作動されている場合に音響警報による示唆のための注意信号が抑圧される、請求項1から23までのいずれか1項記載のシステム。
【請求項25】
ハンズフリートーク装置が作動されている場合には視覚警報のための注意信号のみが出力される、請求項1から24までのいずれか1項記載のシステム。
【請求項26】
電話、車載コンピュータ、ラジオ、エアコンの操作または他の複雑な操作過程が識別された場合、警報の出力が抑圧される、請求項1から25までのいずれか1項記載のシステム。
【請求項27】
前方に存在するカーブの曲率が識別されるかおよび/または走行ダイナミクスモデルにより推定され、車両のカーブ走行が識別された場合に、警報の出力が抑圧される、請求項1から26までのいずれか1項記載のシステム。
【図1】

【図2】
【図3】
【図2】
【図3】
【公表番号】特表2008−501167(P2008−501167A)
【公表日】平成20年1月17日(2008.1.17)
【国際特許分類】
【出願番号】特願2007−513908(P2007−513908)
【出願日】平成17年5月13日(2005.5.13)
【国際出願番号】PCT/EP2005/052224
【国際公開番号】WO2005/119624
【国際公開日】平成17年12月15日(2005.12.15)
【出願人】(390039413)シーメンス アクチエンゲゼルシヤフト (2,104)
【氏名又は名称原語表記】Siemens Aktiengesellschaft
【住所又は居所原語表記】Wittelsbacherplatz 2, D−80333 Muenchen, Germany
【Fターム(参考)】
【公表日】平成20年1月17日(2008.1.17)
【国際特許分類】
【出願日】平成17年5月13日(2005.5.13)
【国際出願番号】PCT/EP2005/052224
【国際公開番号】WO2005/119624
【国際公開日】平成17年12月15日(2005.12.15)
【出願人】(390039413)シーメンス アクチエンゲゼルシヤフト (2,104)
【氏名又は名称原語表記】Siemens Aktiengesellschaft
【住所又は居所原語表記】Wittelsbacherplatz 2, D−80333 Muenchen, Germany
【Fターム(参考)】
[ Back to top ]