
車両用物体検知装置
【課題】前方車両の相対位置および相対速度を精度よく求めることが可能な車両用物体検知装置を提供する。
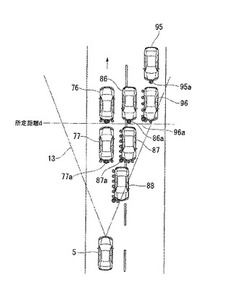
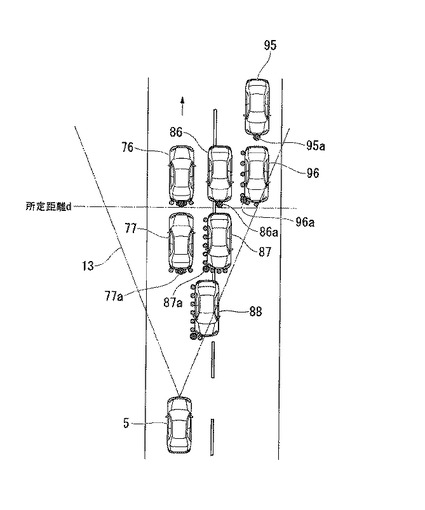
【解決手段】代表点算出手段は、前方車両87の反射点の配列に基づいて線分が2つ認識された場合には該線分の交点として算出される端点87aを、前方車両77の反射点の配列に基づいて線分が1つ認識された場合には該線分の重心点77aを代表点として算出し、代表点補正手段は、前方車両86の相対距離が所定距離d以上の場合に、代表点を端点から重心点86aに補正する構成とした。
【解決手段】代表点算出手段は、前方車両87の反射点の配列に基づいて線分が2つ認識された場合には該線分の交点として算出される端点87aを、前方車両77の反射点の配列に基づいて線分が1つ認識された場合には該線分の重心点77aを代表点として算出し、代表点補正手段は、前方車両86の相対距離が所定距離d以上の場合に、代表点を端点から重心点86aに補正する構成とした。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用物体検知装置に関するものである。特に、レーザレーダを用いてパルス状の送信波を断続的に照射し、物体からの反射波を検出し、放射から検出までの時間により物体までの距離を算出し、物体の横幅、位置、動き等を計測し、警報や車両制御を行うことにより、障害物との接触回避を図る装置に関するものである。
【背景技術】
【0002】
様々な車両用物体検知装置が開発されている。スキャニング式レーダは、車両に電磁波レーダやレーザレーダ等を搭載し、スキャン機構により車両前方の所定角度範囲に光波やミリ波等の送信波を照射し、物体からの反射波を検出することにより、車両前方の物体を認識するものである。この種の装置は、例えば先行車両と所定の車間距離を維持するように車速を制御する装置に適用される。また車両前方の障害物を認識し、障害物と自車両との相対距離や相対速度等に基づいて障害物との接触可能性を判断し、ドライバに警報や回避操作を促したり、自動でブレーキを作動させたりする装置に適用される。
【0003】
上述した技術では、衝突の判定等を行うため、前方車両と自車両との相対速度を高精度に推定する必要がある。相対速度は、レーザレーダにより時系列に検出した前方車両につき同一物体判定(トラッキング)を行い、単位時間当たりの自車両との相対位置の変化によって求めている。この相対速度を精度よく求めるためには、レーザレーダによる時系列で検出した前方車両を正しくトラッキングする必要がある。前方車両を正確にトラッキングするためには、前方車両の位置座標を正しく検出する必要がある。車両等の物体はある程度の大きさを有しているので、車両の特定部分の位置座標を継続的に検出する必要がある。以下には、この車両の特定部分を代表点という。
【0004】
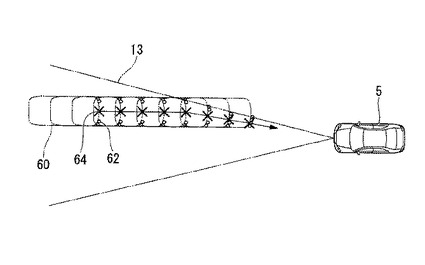
図7は、従来技術に係る物体検知方法の説明図である。この物体検知方法では、前方車両60の手前面の重心点64を、前方車両60の代表点として認識している。この場合、前方車両60の手前面の全部がレーダ走査範囲13に入り、手前面の全体について反射点62が認識できていれば、重心点64として手前面の中心点を算出することができる。しかしながら、自車両5の斜め前方に存在する車両60が自車両5に接近すると、前方車両60の手前面の一部がレーダ走査範囲13から外れる。この場合、レーダ走査範囲13内に存在する手前面の残部の反射点から重心点64を算出すると、重心点64の位置が幅方向にずれることになる。結果として、前方車両60は直進しているにもかかわらず、その進路軌跡が自車両5に向かって曲がっていると誤認することになる。
【0005】
前方車両の一部がレーダ走査範囲から外れた場合に、走査範囲外の部分の位置を補間計算する方法として、特許文献1に記載された物体位置検出方法が挙げられる。この物体位置検出方法は、検知角度内に存在する物体までの距離と方位および物体の横幅を計測し、計測中の物体までの距離および方位から物体の横位置の動きベクトルを計測し、計測中の物体の横幅を記憶しておき、計測中の物体の一部が検知角度外に出たと判断したる場合には、記憶しておいたその物体の横幅と、検知角度内で計測した物体の横位置の動きベクトルに基づいて、検知角度外の部分の位置を補間計算する。これにより、物体の位置や横幅、その物体の存在する範囲や物体の中心位置の軌跡を正しく求めることができるとされている。
【特許文献1】特開2002−122669号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載された技術では、前方車両が自車両に接近してレーザ走査範囲外にかかった場合には、前方車両が遠方に存在していたときに算出した横幅を用いて、走査範囲外の部分の位置を補間することになる。特に、前方車両が対向車両の場合には、リフレクタが存在しないフロント部分で算出した横幅を用いることになる。この幅寸法の誤差により、前方車両の補間精度が低下し、重心点の算出精度が低下する。これにより、相対位置および相対速度を精度よく求めることができないという問題がある。
【0007】
そこで本発明は、検知対象となる物体の相対位置および相対速度を精度よく求めることが可能な車両用物体検知装置の提供を課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、請求項1に係る発明は、自車両(例えば、実施形態における自車両5)周辺の所定範囲に電磁波を送信するとともに、前記自車両周辺に存在する物体(例えば、実施形態における前方車両70,80)からの反射波を受信する送受信手段(例えば、実施形態におけるレーダ12)と、前記物体上における前記電磁波の反射点の位置を算出する反射点算出手段(例えば、実施形態における反射点算出手段14)と、前記反射点に基づいて前記物体の位置を表す代表点の位置を算出する代表点算出手段(例えば、実施形態における代表点算出手段18)と、前記代表点に基づいて前記自車両と前記物体との相対位置および相対距離からなる相対関係を算出する相対関係算出手段(例えば、実施形態における相対関係算出手段20)と、前記相対位置に基づいて前記自車両と前記物体との相対速度を算出する相対速度算出手段(例えば、実施形態における相対速度算出手段21)と、を備えた車両用物体検知装置(例えば、実施形態における車両用物体検知装置10)であって、前記反射点の配列に基づいて前記物体の輪郭を構成する線分を認識する線分認識手段(例えば、実施形態における線分認識手段16)と、前記相対距離に基づいて前記代表点の位置を補正する代表点補正手段(例えば、実施形態における代表点補正手段26)と、を備え、前記代表点算出手段は、前記線分認識手段により前記線分が2つ認識された場合には該線分の交点として算出される前記物体の端点(例えば、実施形態における端点84)を、前記線分が1つ認識された場合には該線分の重心点(例えば、実施形態における重心点74)を前記代表点として算出し、前記代表点補正手段は、前記相対距離が所定距離(例えば、実施形態における所定距離d)以上の場合に、前記代表点を前記端点から前記重心点に補正することを特徴とする。
【0009】
請求項2に係る発明は、前記反射点に基づいて前記自車両の幅方向における前記物体の幅を算出する幅算出手段(例えば、実施形態における幅算出手段22)と、時系列で算出した前記物体の幅を比較し、前記物体の幅が減少している場合に、前記物体の一部が前記所定範囲外に逸脱したと判断する逸脱判断手段(例えば、実施形態における逸脱判断手段24)と、を備え、前記代表点補正手段は、前記相対速度が自車両に向かう方向であり、且つ前記逸脱判断手段により前記物体の一部が前記所定範囲外に逸脱したと判断された場合に、前記代表点を前記重心点から前記端点に補正することを特徴とする。
【0010】
請求項3に係る発明は、前記相対速度算出手段は、前回の前記相対位置の算出時から今回の前記相対位置の算出時にかけて前記代表点が前記重心点および前記端点の一方から他方に変更された場合に、前記自車両の幅方向における前記相対速度の算出を行わないことを特徴とする。
【0011】
請求項4に係る発明は、前記反射点に基づいて前記自車両の幅方向における前記物体の幅を算出する幅算出手段を備え、前記相対速度算出手段は、前回の前記相対位置の算出時から今回の前記相対位置の算出時にかけて前記代表点が前記重心点および前記端点の一方から他方に変更された場合に、前記幅算出手段により算出された前記物体の幅に基づいて前回算出した前記相対位置を補正しつつ、前記自車両の幅方向における前記相対速度を算出することを特徴とする。
【発明の効果】
【0012】
請求項1に係る発明によれば、物体が送受信手段の斜め前方に存在する場合に、手前面および自車両側の側面に沿った線分が2つ認識されるので、物体の自車両側の端点が代表点として算出される。そのため、物体の反対側の端点近傍が自車両周辺の所定範囲外に逸脱した場合でも、代表点を設定し直す必要がなく、また所定範囲外に逸脱した物体の一部を補間して代表点を算出し直す必要もない。したがって、物体の相対位置および相対速度を精度良く算出することができる。
また、物体との相対距離が所定距離以上の場合に代表点を端点から重心点に補正する構成としたので、物体が遠方にあるため反射点の個数が少なく位置精度が低い場合でも、平均化処理して求めた重心点を代表点とすることが可能になり、代表点の位置精度を確保することができる。したがって、物体の相対位置および相対速度を精度良く算出することができる。
【0013】
請求項2に係る発明によれば、物体の一部が所定範囲内から範囲外に逸脱した場合でも、代表点を重心点から端点に設定し直すことにより、前方車両の追跡を継続することができる。
【0014】
なお、前回の相対位置の算出時から今回の相対位置の算出時にかけて代表点が重心点および端点の一方から他方に変更された場合には、実態とは異なり幅方向の相対速度が算出されることになる。
これに対して、請求項3に係る発明によれば、その場合に自車両の幅方向における相対速度の算出を行わないので、算出された相対位置および相対速度の信頼性を向上させることができる。
【0015】
なお、代表点が重心点および端点の一方から他方に変更された場合には、代表点の位置が物体の幅の半分程度ずれることになる。
請求項4に係る発明によれば、物体の幅に基づいて前回算出した相対位置を補正しつつ、自車両の幅方向における相対速度を算出するので、物体の相対位置および相対速度を精度よく算出することができる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の実施形態につき図面を参照して説明する。
(車両用物体検知装置)
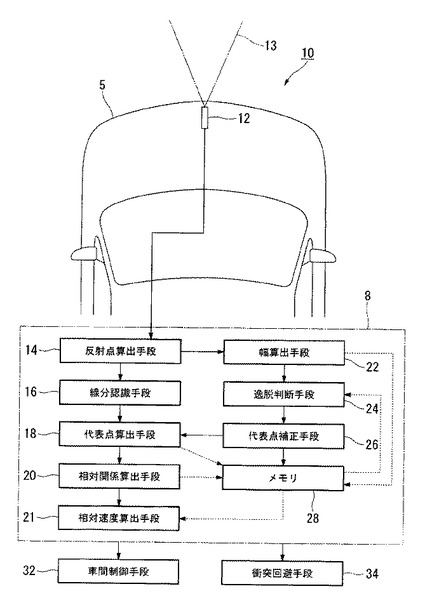
図1は、本実施形態に係る車両用物体検知装置のブロック図である。本実施形態に係る車両用物体検知装置10は、車両5に搭載されたものであって、電磁波を送受信するレーダ12と、電磁波の反射点算出手段14と、複数の反射点から前方車両の代表点を算出する代表点算出手段18と、代表点に基づいて自車両5と前方車両との相対関係を算出する相対関係算出手段20および相対速度を算出する相対速度算出手段21とを備えている。なお、レーダ12以外の反射点算出手段14や代表点算出手段18、相対関係算出手段20、相対速度算出手段21等は、車両5に搭載されたコンピュータ8に構築されている。
【0017】
車両5の前部には、レーザレーダやミリ波レーダ等のレーダ12が搭載されている。レーダ12は、電磁波を送信する送信部および反射波を受信する受信部を備えている。送信部は、前方に向かって電磁波を送信しつつ、所定の角度範囲13を走査しうるようになっている。受信部は、送信部から送信され前方車両で反射された反射波を受信するようになっている。
【0018】
また、レーダ12によって送信された電磁波が前方車両で反射する点を算出する反射点算出手段14が設けられている。一般に自車両に対する反射波の入射方向から、反射点が存在する方向を検知することができる。また電磁波の伝播速度は一定であるから、送受信に要した時間により反射点までの距離を算出することができる。そして、自車両に対する反射点の方向および距離に基づいて、自車両に対する反射点の相対位置(座標)を算出することができる。
【0019】
また、前方車両の位置を表す代表点の位置を算出する代表点算出手段18が設けられている。代表点算出手段18は、原則として以下の方法で代表点を算出する。
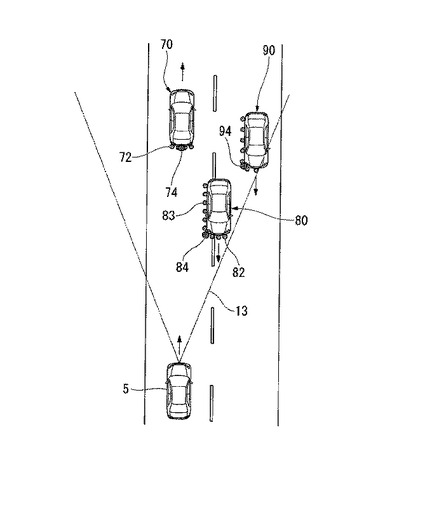
図2は、原則的な代表点算出方法の説明図である。前方車両70が自車両5の正面に存在する場合には、自車両5から照射された電磁波は、前方車両70の手前面のみで反射される。そのため、前方車両70の手前面のみに複数の反射点72が検出される。この場合には、複数の反射点72の重心点74を、前方車両70の代表点として算出する。なお前方車両が自車両と同方向に進行する先行車両である場合には、その手前面は背面であり、前方車両が自車両と逆方向に進行する対向車両である場合には、その手前面は前面である。
【0020】
一方、前方車両80が自車両5の斜め前方に存在する場合には、自車両5から照射された電磁波は、前方車両80の手前面に加えて、自車両5側の側面でも反射する。そのため、手前面に複数の反射点82が検出されるとともに、側面にも複数の反射点83が検出される。この場合には、複数の反射点82から手前面の輪郭を構成する線分を求めるとともに、複数の反射点83から側面の輪郭を構成する線分を求める。そして、手前面の輪郭線と側面の輪郭線との交点(すなわち、前方車両の自車両側の角部端点)を、前方車両の代表点として算出する。
なお代表点算出手段18は、算出した代表点の種類(重心点または端点)をメモリ28に記録する。
【0021】
なお、手前面の輪郭線および側面の輪郭線を求めるため、図1に示すように線分認識手段16が設けられている。線分認識手段16は、反射点の配列に基づいて前方車両の輪郭を構成する線分を認識するものである。各輪郭線の算出には、最小二乗法等を利用ことができる。
【0022】
一方、自車両5と前方車両との相対位置および相対距離からなる相対関係を算出する相対関係算出手段20が設けられている。上述した代表点算出手段18では、自車両に対する前方車両の代表点の相対座標が算出される。相対関係算出手段20では、この相対座標に基づいて、自車両5と前方車両との相対位置および相対距離を算出するようになっている。算出した相対位置は、時間情報とともにメモリ28に記録される。
【0023】
また、自車両と先行車両との相対速度を算出する相対速度算出手段21が設けられている。相対速度算出手段21は、相対関係算出手段20から現在の相対位置を受信するとともに、メモリ28に記録された前回の相対位置を読み出す。そして、単位時間あたりの相対位置の差を求めることにより、自車両5と先行車両との相対速度を算出する。なお相対速度は、水平2方向(自車両の前後方向および幅方向)のそれぞれについて算出する。
【0024】
(代表点補正手段)
本実施形態に係る車両用物体検知装置10は、相対関係算出手段20により算出された相対距離に基づいて、代表点算出手段18により算出された代表点を補正する代表点補正手段26を備えている。
図3は、代表点補正方法の説明図である。自車両5の斜め前方に存在する前方車両87は、手前面および側面に複数の反射点が検出されるため、代表点算出手段18は代表点を端点87aに設定する。自車両5の斜め前方に存在する前方車両86についても、同様に代表点を端点に設定する。これに対して代表点補正手段は、前方車両86と自車両5との相対距離が所定距離d以上である前方車両86について、代表点を端点から手前面の重心点86aに補正する処理を行う。
【0025】
図1に戻り、自車両の幅方向における前方車両の幅を算出する幅算出手段22が設けられている。幅算出手段22は、反射点算出手段14により検出された前方車両の複数の反射点のうち、自車両の幅方向と略平行な(手前面の)反射点群を抽出する。そして、その両端部に位置する反射点間の距離を、前方車両の幅として算出する。なお図2に示すように、前方車両90の手前面の一部がレーダ走査範囲13外に逸脱した場合でも、手前面の残部の反射点のうち両端部の反射点間の距離を前方車両90の幅とすればよい。算出した前方車両の幅は、時間情報とともにメモリ28に記録する。
【0026】
図1に戻り、前方車両の一部がレーダの走査範囲外に逸脱したことを判断する逸脱判断手段24が設けられている。図3において、前方車両95は手前面の全部がレーダ走査範囲13の内側に存在しているので、手前面の全体から反射点が検出される。これに対して、前方車両96は手前面の一部がレーダ走査範囲13の外側に逸脱しているので、手前面の残部のみから反射点が検出される。そのため、前方車両95が前方車両96の位置まで移動すると、両端部の反射点間の距離が小さくなり、幅算出手段22によって算出される前方車両の幅が減少することになる。そこで、図1に示す逸脱判断手段24は、幅算出手段22から今回算出した前方車両の幅を受信するとともに、メモリ28から前回算出した前方車両の幅を読み出す。そして、今回算出した前方車両の幅が前回より減少している場合には、前方車両の一部がレーダ走査範囲外に逸脱したと判断する。
【0027】
ところで、図3に示す前方車両96のように、手前面の一部がレーダ走査範囲13の外側に逸脱している場合において、手前面の残部の反射点から重心点を算出すると、レーダ走査範囲13からの逸脱量によって重心点の位置が変動することになる。重心点の位置が幅方向にずれると、幅方向の相対速度が算出されることになる。その結果、前方車両が直進しているにもかかわらず、斜行していると誤認されることになる。
【0028】
そこで、図1に示す代表点補正手段26は、自車両に接近する前方車両の一部がレーダ走査範囲外に逸脱した場合に、代表点を重心点から端点に補正する処理を行う。すなわち、相対速度算出手段21により算出された相対速度が自車に向かう方向であり、かつ逸脱判断手段24により前方車両の一部がレーダ走査範囲外に逸脱したと判断された場合に、前方車両の代表点を重心点から端点に補正する。具体的には、図3に示す前方車両95の代表点は重心点95aであるが、これが前方車両96の位置まで移動した場合に、代表点を端点96aに補正する。このように、前方車両の一部がレーダ走査範囲内から範囲外に逸脱した場合でも、代表点を重心点から端点に設定し直すことにより、前方車両の追跡を継続することができる。
【0029】
なお、前方車両95が前方車両96の位置まで移動してレーダ走査範囲外に逸脱した場合だけでなく、前方車両86が所定距離dを跨いで前方車両87の位置まで移動した場合にも、代表点が重心点から端点に変更されることになる。このように代表点が重心点および端点の一方から他方に変更された場合には、幅方向の相対速度が算出されることになり、前方車両が直進しているにもかかわらず、斜行していると誤認されることになる。
【0030】
そこで、図1に示す相対速度算出手段21は、代表点が重心点および端点の一方から他方に変更された場合に、幅方向の相対速度の算出を行わないようになっている。具体的には、相対速度算出手段21は、代表点算出手段から今回の代表点の種類(重心点または端点)を受信するとともに、メモリ28から前回の代表点の種類を読み出す。そして、今回の代表点の種類が前回と異なっている場合には、幅方向の相対速度の算出を行わない。この場合でも、自車両の前後方向における相対速度の算出は行うようにする。これにより、算出された相対位置および相対速度の信頼性を向上させることができる。
【0031】
なお代表点が変更された場合に、幅方向の相対速度を補正するようにしてもよい。代表点が重心点および端点の一方から他方に変更された場合には、代表点の位置が前方車両の幅の半分程度ずれることになる。そこで、前回の前方車両の相対位置を前方車両の幅の半分程度ずらしつつ、相対速度を算出することが望ましい。これにより、前方車両の相対位置および相対速度を精度よく算出することができる。
【0032】
そして、本実施形態に係る車両用物体検知装置10は、車間制御手段32や衝突回避手段34に接続されている。車間制御手段32は、前方車両と所定の車間距離を維持するように自車両の車速を制御するものである。具体的には、上記により算出された相対関係や相対速度等に基づいて、自車両のアクセル開度の上限を調整するようになっている。一方の衝突回避手段34は、上記により算出された相対距離や相対速度等に基づいて、前方車両との接触可能性を判断する。そして、ドライバに警報や回避操作を促したり、自動でブレーキを作動させたりするようになっている。
【0033】
(車両用物体検知方法)
次に、本実施形態に係る車両用物体検知方法について説明する。
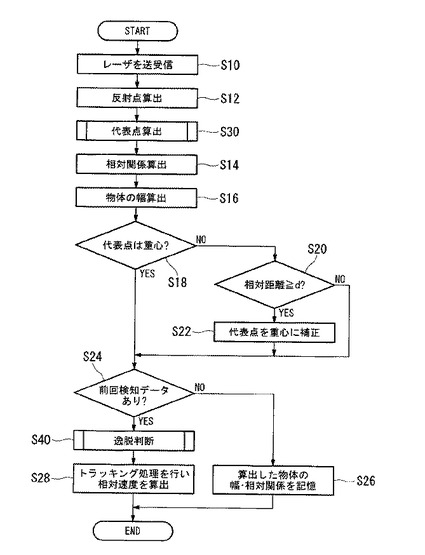
図4は、本実施形態に係る車両用物体検知方法のフローチャートである。まずS10において、レーダ12により、自車両周辺の所定範囲に電磁波を送信するとともに、前方車両からの反射波を受信する。次にS12において、反射点算出手段14により、前方車両における電磁波の反射点の位置を算出する。すなわち、図2に示すように、自車両5の正面に存在する前方車両70の場合には、手前面の反射点72の位置を算出する。一方、自車両5の斜め前方に存在する車両80の場合には、手前面の反射点82に加えて側面の反射点83の位置を算出する。
【0034】
次にS30において、代表点算出手段18により、前方車両の位置を表す代表点の位置を算出する。
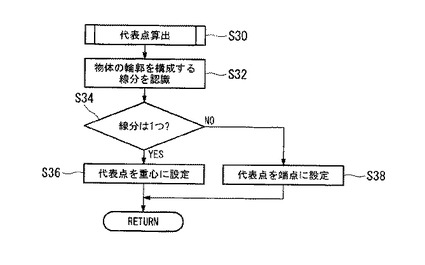
図5は、代表点算出サブルーチンのフローチャートである。まずS32において、線分認識手段16により、反射点の配列から前方車両の輪郭を構成する線分を認識する。次にS34において、代表点算出手段18により、認識された線分が1つであるか判断する。判断がYes(線分が1つ)の場合にはS36に進み、代表点を重心点に設定する。一方、判断がNo(線分が2つ)の場合にはS38に進み、代表点を端点に設定する。すなわち、図2に示す前方車両70の場合には、手前面に1つの線分のみが認識されるので、代表点を重心点74に設定する。一方、前方車両80の場合には、手前面および側面に2つの線分が認識されるので、代表点を両者の交点である端点84に設定する。
【0035】
図4に戻り、S14において、相対関係算出手段20により、自車両と前方車両との相対位置および相対距離からなる相対関係を算出する。次にS16において、幅算出手段22により、自車両の幅方向における前方車両の幅を算出する。
【0036】
次に、前方車両の相対距離が所定距離d以上の場合に、代表点を端点から重心点に補正する処理を行う。具体的には、まずS18において、代表点が重心点であるか判断する。判断がNo(代表点が端点)の場合にはS20に進み、自車両と前方車両との相対距離が所定距離d以上であるか判断する。判断がYes(相対距離がd以上)の場合には、代表点補正手段26により、代表点を端点から重心点に補正する。なお、S18の判断がYes(代表点が重心点)の場合、およびS20の判断がNo(相対距離がd未満)の場合には、代表点の補正を行わない。
【0037】
次に、前方車両の相対速度が自車に向かう方向であり且つ前方車両がレーダ走査範囲外に逸脱した場合に、代表点を重心点から端点に補正する処理を行う。具体的には、まずS24において、前回検知した前方車両の幅データがメモリ28に記録されているか判断する。判断がNo(初回検知)の場合にはS26に進み、S14で算出した前方車両との相対関係およびS16で算出した前方車両の幅をメモリ28に記録する。S24の判断がYes(2回目以降の検知)の場合にはS40に進み、逸脱判断手段24により逸脱判断を行う。
【0038】
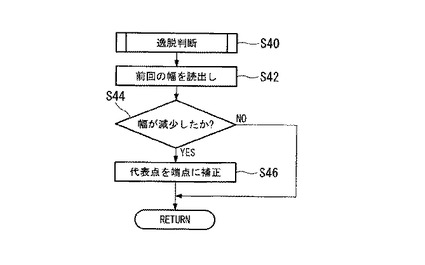
図6は、逸脱判断サブルーチンのフローチャートである。まずS42において、前回検知した前方車両の幅をメモリ28から読み出す。次にS44において、前回検知した前方車両の幅と、S16において今回検知した幅とを比較して、前方車両の幅が減少したか判断する。判断がNoの場合には代表点の補正を行わない。判断がYesの場合には、前方車両の相対速度が自車に向かう方向であり且つ前方車両がレーダ走査範囲外に逸脱した場合であるから、代表点を重心点から端点に補正する。なお、S30において代表点が既に端点に設定されている場合には、代表点の補正を行わなくてもよい。
【0039】
図4に戻り、S28において、相対速度算出手段21により、自車両と前方車両との相対速度を算出する。具体的には、まず前回検知した前方車両と今回検知した前方車両との同一性判断(トラッキング処理)を行う。同一であると判断した場合には、前回算出した前方車両との相対位置と、S14において今回算出した相対位置とを用いて、相対速度を算出する。なお、前回算出時から今回算出時にかけて代表点が重心点および端点の一方から他方に変更された場合には、上述したように幅方向の相対速度の算出を行わないようにする。なお、前回算出した前方車両の相対位置を前方車両の幅の半分程度ずらしつつ、相対速度を算出してもよい。
【0040】
以上に詳述したように、本実施形態に係る車両用物体検知装置は、前方車両の反射点の配列に基づいて線分が2つ認識された場合には該線分の交点として算出される前方車両の端点を、線分が1つ認識された場合には該線分の重心点を代表点として算出し、前方車両の相対距離が所定距離以上の場合には、代表点を端点から重心点に補正する構成とした。
この構成によれば、前方車両が自車両の斜め前方に存在する場合には、手前面および自車両側の側面に沿った線分が2つ認識されるので、前方車両の自車両側の端点が代表点として算出される。そのため、前方車両の反対側の端点近傍がレーダ走査範囲外に逸脱した場合でも、代表点を設定し直す必要がなく、またレーダ走査範囲外に逸脱した前方車両の一部を補間して代表点を算出し直す必要もない。したがって、前方車両の相対位置および相対速度を精度良く算出することができる。
また、前方車両の相対距離が所定距離以上の場合に代表点を端点から重心点に補正する構成としたので、前方車両が遠方にあるため反射点の個数が少なく位置精度が低い場合でも、平均化処理して求めた重心点を代表点とすることが可能になり、代表点の位置精度を確保することができる。したがって、前方車両の相対位置および相対速度を精度良く算出することができる。
【図面の簡単な説明】
【0041】
【図1】実施形態に係る車両用物体検知装置のブロック図である。
【図2】代表点算出方法の説明図である。
【図3】代表点補正方法の説明図である。
【図4】実施形態に係る車両用物体検知方法のフローチャートである。
【図5】代表点算出サブルーチンのフローチャートである。
【図6】逸脱判断サブルーチンのフローチャートである。
【図7】従来技術に係る物体検知方法の説明図である。
【符号の説明】
【0042】
d…所定距離 5…自車両 10…車両用物体検知装置 12…レーダ(送受信手段) 13…レーダ走査範囲(所定範囲) 14…反射点算出手段 16…線分認識手段 18…代表点算出手段 20…相対関係算出手段 21…相対速度算出手段 22…幅算出手段 24…逸脱判断手段 26…代表点補正手段 77,86,87…前方車両(物体) 77a,86a…重心点 87a…端点
【技術分野】
【0001】
本発明は、車両用物体検知装置に関するものである。特に、レーザレーダを用いてパルス状の送信波を断続的に照射し、物体からの反射波を検出し、放射から検出までの時間により物体までの距離を算出し、物体の横幅、位置、動き等を計測し、警報や車両制御を行うことにより、障害物との接触回避を図る装置に関するものである。
【背景技術】
【0002】
様々な車両用物体検知装置が開発されている。スキャニング式レーダは、車両に電磁波レーダやレーザレーダ等を搭載し、スキャン機構により車両前方の所定角度範囲に光波やミリ波等の送信波を照射し、物体からの反射波を検出することにより、車両前方の物体を認識するものである。この種の装置は、例えば先行車両と所定の車間距離を維持するように車速を制御する装置に適用される。また車両前方の障害物を認識し、障害物と自車両との相対距離や相対速度等に基づいて障害物との接触可能性を判断し、ドライバに警報や回避操作を促したり、自動でブレーキを作動させたりする装置に適用される。
【0003】
上述した技術では、衝突の判定等を行うため、前方車両と自車両との相対速度を高精度に推定する必要がある。相対速度は、レーザレーダにより時系列に検出した前方車両につき同一物体判定(トラッキング)を行い、単位時間当たりの自車両との相対位置の変化によって求めている。この相対速度を精度よく求めるためには、レーザレーダによる時系列で検出した前方車両を正しくトラッキングする必要がある。前方車両を正確にトラッキングするためには、前方車両の位置座標を正しく検出する必要がある。車両等の物体はある程度の大きさを有しているので、車両の特定部分の位置座標を継続的に検出する必要がある。以下には、この車両の特定部分を代表点という。
【0004】
図7は、従来技術に係る物体検知方法の説明図である。この物体検知方法では、前方車両60の手前面の重心点64を、前方車両60の代表点として認識している。この場合、前方車両60の手前面の全部がレーダ走査範囲13に入り、手前面の全体について反射点62が認識できていれば、重心点64として手前面の中心点を算出することができる。しかしながら、自車両5の斜め前方に存在する車両60が自車両5に接近すると、前方車両60の手前面の一部がレーダ走査範囲13から外れる。この場合、レーダ走査範囲13内に存在する手前面の残部の反射点から重心点64を算出すると、重心点64の位置が幅方向にずれることになる。結果として、前方車両60は直進しているにもかかわらず、その進路軌跡が自車両5に向かって曲がっていると誤認することになる。
【0005】
前方車両の一部がレーダ走査範囲から外れた場合に、走査範囲外の部分の位置を補間計算する方法として、特許文献1に記載された物体位置検出方法が挙げられる。この物体位置検出方法は、検知角度内に存在する物体までの距離と方位および物体の横幅を計測し、計測中の物体までの距離および方位から物体の横位置の動きベクトルを計測し、計測中の物体の横幅を記憶しておき、計測中の物体の一部が検知角度外に出たと判断したる場合には、記憶しておいたその物体の横幅と、検知角度内で計測した物体の横位置の動きベクトルに基づいて、検知角度外の部分の位置を補間計算する。これにより、物体の位置や横幅、その物体の存在する範囲や物体の中心位置の軌跡を正しく求めることができるとされている。
【特許文献1】特開2002−122669号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
しかしながら、特許文献1に記載された技術では、前方車両が自車両に接近してレーザ走査範囲外にかかった場合には、前方車両が遠方に存在していたときに算出した横幅を用いて、走査範囲外の部分の位置を補間することになる。特に、前方車両が対向車両の場合には、リフレクタが存在しないフロント部分で算出した横幅を用いることになる。この幅寸法の誤差により、前方車両の補間精度が低下し、重心点の算出精度が低下する。これにより、相対位置および相対速度を精度よく求めることができないという問題がある。
【0007】
そこで本発明は、検知対象となる物体の相対位置および相対速度を精度よく求めることが可能な車両用物体検知装置の提供を課題とする。
【課題を解決するための手段】
【0008】
上記課題を解決するために、請求項1に係る発明は、自車両(例えば、実施形態における自車両5)周辺の所定範囲に電磁波を送信するとともに、前記自車両周辺に存在する物体(例えば、実施形態における前方車両70,80)からの反射波を受信する送受信手段(例えば、実施形態におけるレーダ12)と、前記物体上における前記電磁波の反射点の位置を算出する反射点算出手段(例えば、実施形態における反射点算出手段14)と、前記反射点に基づいて前記物体の位置を表す代表点の位置を算出する代表点算出手段(例えば、実施形態における代表点算出手段18)と、前記代表点に基づいて前記自車両と前記物体との相対位置および相対距離からなる相対関係を算出する相対関係算出手段(例えば、実施形態における相対関係算出手段20)と、前記相対位置に基づいて前記自車両と前記物体との相対速度を算出する相対速度算出手段(例えば、実施形態における相対速度算出手段21)と、を備えた車両用物体検知装置(例えば、実施形態における車両用物体検知装置10)であって、前記反射点の配列に基づいて前記物体の輪郭を構成する線分を認識する線分認識手段(例えば、実施形態における線分認識手段16)と、前記相対距離に基づいて前記代表点の位置を補正する代表点補正手段(例えば、実施形態における代表点補正手段26)と、を備え、前記代表点算出手段は、前記線分認識手段により前記線分が2つ認識された場合には該線分の交点として算出される前記物体の端点(例えば、実施形態における端点84)を、前記線分が1つ認識された場合には該線分の重心点(例えば、実施形態における重心点74)を前記代表点として算出し、前記代表点補正手段は、前記相対距離が所定距離(例えば、実施形態における所定距離d)以上の場合に、前記代表点を前記端点から前記重心点に補正することを特徴とする。
【0009】
請求項2に係る発明は、前記反射点に基づいて前記自車両の幅方向における前記物体の幅を算出する幅算出手段(例えば、実施形態における幅算出手段22)と、時系列で算出した前記物体の幅を比較し、前記物体の幅が減少している場合に、前記物体の一部が前記所定範囲外に逸脱したと判断する逸脱判断手段(例えば、実施形態における逸脱判断手段24)と、を備え、前記代表点補正手段は、前記相対速度が自車両に向かう方向であり、且つ前記逸脱判断手段により前記物体の一部が前記所定範囲外に逸脱したと判断された場合に、前記代表点を前記重心点から前記端点に補正することを特徴とする。
【0010】
請求項3に係る発明は、前記相対速度算出手段は、前回の前記相対位置の算出時から今回の前記相対位置の算出時にかけて前記代表点が前記重心点および前記端点の一方から他方に変更された場合に、前記自車両の幅方向における前記相対速度の算出を行わないことを特徴とする。
【0011】
請求項4に係る発明は、前記反射点に基づいて前記自車両の幅方向における前記物体の幅を算出する幅算出手段を備え、前記相対速度算出手段は、前回の前記相対位置の算出時から今回の前記相対位置の算出時にかけて前記代表点が前記重心点および前記端点の一方から他方に変更された場合に、前記幅算出手段により算出された前記物体の幅に基づいて前回算出した前記相対位置を補正しつつ、前記自車両の幅方向における前記相対速度を算出することを特徴とする。
【発明の効果】
【0012】
請求項1に係る発明によれば、物体が送受信手段の斜め前方に存在する場合に、手前面および自車両側の側面に沿った線分が2つ認識されるので、物体の自車両側の端点が代表点として算出される。そのため、物体の反対側の端点近傍が自車両周辺の所定範囲外に逸脱した場合でも、代表点を設定し直す必要がなく、また所定範囲外に逸脱した物体の一部を補間して代表点を算出し直す必要もない。したがって、物体の相対位置および相対速度を精度良く算出することができる。
また、物体との相対距離が所定距離以上の場合に代表点を端点から重心点に補正する構成としたので、物体が遠方にあるため反射点の個数が少なく位置精度が低い場合でも、平均化処理して求めた重心点を代表点とすることが可能になり、代表点の位置精度を確保することができる。したがって、物体の相対位置および相対速度を精度良く算出することができる。
【0013】
請求項2に係る発明によれば、物体の一部が所定範囲内から範囲外に逸脱した場合でも、代表点を重心点から端点に設定し直すことにより、前方車両の追跡を継続することができる。
【0014】
なお、前回の相対位置の算出時から今回の相対位置の算出時にかけて代表点が重心点および端点の一方から他方に変更された場合には、実態とは異なり幅方向の相対速度が算出されることになる。
これに対して、請求項3に係る発明によれば、その場合に自車両の幅方向における相対速度の算出を行わないので、算出された相対位置および相対速度の信頼性を向上させることができる。
【0015】
なお、代表点が重心点および端点の一方から他方に変更された場合には、代表点の位置が物体の幅の半分程度ずれることになる。
請求項4に係る発明によれば、物体の幅に基づいて前回算出した相対位置を補正しつつ、自車両の幅方向における相対速度を算出するので、物体の相対位置および相対速度を精度よく算出することができる。
【発明を実施するための最良の形態】
【0016】
以下、本発明の実施形態につき図面を参照して説明する。
(車両用物体検知装置)
図1は、本実施形態に係る車両用物体検知装置のブロック図である。本実施形態に係る車両用物体検知装置10は、車両5に搭載されたものであって、電磁波を送受信するレーダ12と、電磁波の反射点算出手段14と、複数の反射点から前方車両の代表点を算出する代表点算出手段18と、代表点に基づいて自車両5と前方車両との相対関係を算出する相対関係算出手段20および相対速度を算出する相対速度算出手段21とを備えている。なお、レーダ12以外の反射点算出手段14や代表点算出手段18、相対関係算出手段20、相対速度算出手段21等は、車両5に搭載されたコンピュータ8に構築されている。
【0017】
車両5の前部には、レーザレーダやミリ波レーダ等のレーダ12が搭載されている。レーダ12は、電磁波を送信する送信部および反射波を受信する受信部を備えている。送信部は、前方に向かって電磁波を送信しつつ、所定の角度範囲13を走査しうるようになっている。受信部は、送信部から送信され前方車両で反射された反射波を受信するようになっている。
【0018】
また、レーダ12によって送信された電磁波が前方車両で反射する点を算出する反射点算出手段14が設けられている。一般に自車両に対する反射波の入射方向から、反射点が存在する方向を検知することができる。また電磁波の伝播速度は一定であるから、送受信に要した時間により反射点までの距離を算出することができる。そして、自車両に対する反射点の方向および距離に基づいて、自車両に対する反射点の相対位置(座標)を算出することができる。
【0019】
また、前方車両の位置を表す代表点の位置を算出する代表点算出手段18が設けられている。代表点算出手段18は、原則として以下の方法で代表点を算出する。
図2は、原則的な代表点算出方法の説明図である。前方車両70が自車両5の正面に存在する場合には、自車両5から照射された電磁波は、前方車両70の手前面のみで反射される。そのため、前方車両70の手前面のみに複数の反射点72が検出される。この場合には、複数の反射点72の重心点74を、前方車両70の代表点として算出する。なお前方車両が自車両と同方向に進行する先行車両である場合には、その手前面は背面であり、前方車両が自車両と逆方向に進行する対向車両である場合には、その手前面は前面である。
【0020】
一方、前方車両80が自車両5の斜め前方に存在する場合には、自車両5から照射された電磁波は、前方車両80の手前面に加えて、自車両5側の側面でも反射する。そのため、手前面に複数の反射点82が検出されるとともに、側面にも複数の反射点83が検出される。この場合には、複数の反射点82から手前面の輪郭を構成する線分を求めるとともに、複数の反射点83から側面の輪郭を構成する線分を求める。そして、手前面の輪郭線と側面の輪郭線との交点(すなわち、前方車両の自車両側の角部端点)を、前方車両の代表点として算出する。
なお代表点算出手段18は、算出した代表点の種類(重心点または端点)をメモリ28に記録する。
【0021】
なお、手前面の輪郭線および側面の輪郭線を求めるため、図1に示すように線分認識手段16が設けられている。線分認識手段16は、反射点の配列に基づいて前方車両の輪郭を構成する線分を認識するものである。各輪郭線の算出には、最小二乗法等を利用ことができる。
【0022】
一方、自車両5と前方車両との相対位置および相対距離からなる相対関係を算出する相対関係算出手段20が設けられている。上述した代表点算出手段18では、自車両に対する前方車両の代表点の相対座標が算出される。相対関係算出手段20では、この相対座標に基づいて、自車両5と前方車両との相対位置および相対距離を算出するようになっている。算出した相対位置は、時間情報とともにメモリ28に記録される。
【0023】
また、自車両と先行車両との相対速度を算出する相対速度算出手段21が設けられている。相対速度算出手段21は、相対関係算出手段20から現在の相対位置を受信するとともに、メモリ28に記録された前回の相対位置を読み出す。そして、単位時間あたりの相対位置の差を求めることにより、自車両5と先行車両との相対速度を算出する。なお相対速度は、水平2方向(自車両の前後方向および幅方向)のそれぞれについて算出する。
【0024】
(代表点補正手段)
本実施形態に係る車両用物体検知装置10は、相対関係算出手段20により算出された相対距離に基づいて、代表点算出手段18により算出された代表点を補正する代表点補正手段26を備えている。
図3は、代表点補正方法の説明図である。自車両5の斜め前方に存在する前方車両87は、手前面および側面に複数の反射点が検出されるため、代表点算出手段18は代表点を端点87aに設定する。自車両5の斜め前方に存在する前方車両86についても、同様に代表点を端点に設定する。これに対して代表点補正手段は、前方車両86と自車両5との相対距離が所定距離d以上である前方車両86について、代表点を端点から手前面の重心点86aに補正する処理を行う。
【0025】
図1に戻り、自車両の幅方向における前方車両の幅を算出する幅算出手段22が設けられている。幅算出手段22は、反射点算出手段14により検出された前方車両の複数の反射点のうち、自車両の幅方向と略平行な(手前面の)反射点群を抽出する。そして、その両端部に位置する反射点間の距離を、前方車両の幅として算出する。なお図2に示すように、前方車両90の手前面の一部がレーダ走査範囲13外に逸脱した場合でも、手前面の残部の反射点のうち両端部の反射点間の距離を前方車両90の幅とすればよい。算出した前方車両の幅は、時間情報とともにメモリ28に記録する。
【0026】
図1に戻り、前方車両の一部がレーダの走査範囲外に逸脱したことを判断する逸脱判断手段24が設けられている。図3において、前方車両95は手前面の全部がレーダ走査範囲13の内側に存在しているので、手前面の全体から反射点が検出される。これに対して、前方車両96は手前面の一部がレーダ走査範囲13の外側に逸脱しているので、手前面の残部のみから反射点が検出される。そのため、前方車両95が前方車両96の位置まで移動すると、両端部の反射点間の距離が小さくなり、幅算出手段22によって算出される前方車両の幅が減少することになる。そこで、図1に示す逸脱判断手段24は、幅算出手段22から今回算出した前方車両の幅を受信するとともに、メモリ28から前回算出した前方車両の幅を読み出す。そして、今回算出した前方車両の幅が前回より減少している場合には、前方車両の一部がレーダ走査範囲外に逸脱したと判断する。
【0027】
ところで、図3に示す前方車両96のように、手前面の一部がレーダ走査範囲13の外側に逸脱している場合において、手前面の残部の反射点から重心点を算出すると、レーダ走査範囲13からの逸脱量によって重心点の位置が変動することになる。重心点の位置が幅方向にずれると、幅方向の相対速度が算出されることになる。その結果、前方車両が直進しているにもかかわらず、斜行していると誤認されることになる。
【0028】
そこで、図1に示す代表点補正手段26は、自車両に接近する前方車両の一部がレーダ走査範囲外に逸脱した場合に、代表点を重心点から端点に補正する処理を行う。すなわち、相対速度算出手段21により算出された相対速度が自車に向かう方向であり、かつ逸脱判断手段24により前方車両の一部がレーダ走査範囲外に逸脱したと判断された場合に、前方車両の代表点を重心点から端点に補正する。具体的には、図3に示す前方車両95の代表点は重心点95aであるが、これが前方車両96の位置まで移動した場合に、代表点を端点96aに補正する。このように、前方車両の一部がレーダ走査範囲内から範囲外に逸脱した場合でも、代表点を重心点から端点に設定し直すことにより、前方車両の追跡を継続することができる。
【0029】
なお、前方車両95が前方車両96の位置まで移動してレーダ走査範囲外に逸脱した場合だけでなく、前方車両86が所定距離dを跨いで前方車両87の位置まで移動した場合にも、代表点が重心点から端点に変更されることになる。このように代表点が重心点および端点の一方から他方に変更された場合には、幅方向の相対速度が算出されることになり、前方車両が直進しているにもかかわらず、斜行していると誤認されることになる。
【0030】
そこで、図1に示す相対速度算出手段21は、代表点が重心点および端点の一方から他方に変更された場合に、幅方向の相対速度の算出を行わないようになっている。具体的には、相対速度算出手段21は、代表点算出手段から今回の代表点の種類(重心点または端点)を受信するとともに、メモリ28から前回の代表点の種類を読み出す。そして、今回の代表点の種類が前回と異なっている場合には、幅方向の相対速度の算出を行わない。この場合でも、自車両の前後方向における相対速度の算出は行うようにする。これにより、算出された相対位置および相対速度の信頼性を向上させることができる。
【0031】
なお代表点が変更された場合に、幅方向の相対速度を補正するようにしてもよい。代表点が重心点および端点の一方から他方に変更された場合には、代表点の位置が前方車両の幅の半分程度ずれることになる。そこで、前回の前方車両の相対位置を前方車両の幅の半分程度ずらしつつ、相対速度を算出することが望ましい。これにより、前方車両の相対位置および相対速度を精度よく算出することができる。
【0032】
そして、本実施形態に係る車両用物体検知装置10は、車間制御手段32や衝突回避手段34に接続されている。車間制御手段32は、前方車両と所定の車間距離を維持するように自車両の車速を制御するものである。具体的には、上記により算出された相対関係や相対速度等に基づいて、自車両のアクセル開度の上限を調整するようになっている。一方の衝突回避手段34は、上記により算出された相対距離や相対速度等に基づいて、前方車両との接触可能性を判断する。そして、ドライバに警報や回避操作を促したり、自動でブレーキを作動させたりするようになっている。
【0033】
(車両用物体検知方法)
次に、本実施形態に係る車両用物体検知方法について説明する。
図4は、本実施形態に係る車両用物体検知方法のフローチャートである。まずS10において、レーダ12により、自車両周辺の所定範囲に電磁波を送信するとともに、前方車両からの反射波を受信する。次にS12において、反射点算出手段14により、前方車両における電磁波の反射点の位置を算出する。すなわち、図2に示すように、自車両5の正面に存在する前方車両70の場合には、手前面の反射点72の位置を算出する。一方、自車両5の斜め前方に存在する車両80の場合には、手前面の反射点82に加えて側面の反射点83の位置を算出する。
【0034】
次にS30において、代表点算出手段18により、前方車両の位置を表す代表点の位置を算出する。
図5は、代表点算出サブルーチンのフローチャートである。まずS32において、線分認識手段16により、反射点の配列から前方車両の輪郭を構成する線分を認識する。次にS34において、代表点算出手段18により、認識された線分が1つであるか判断する。判断がYes(線分が1つ)の場合にはS36に進み、代表点を重心点に設定する。一方、判断がNo(線分が2つ)の場合にはS38に進み、代表点を端点に設定する。すなわち、図2に示す前方車両70の場合には、手前面に1つの線分のみが認識されるので、代表点を重心点74に設定する。一方、前方車両80の場合には、手前面および側面に2つの線分が認識されるので、代表点を両者の交点である端点84に設定する。
【0035】
図4に戻り、S14において、相対関係算出手段20により、自車両と前方車両との相対位置および相対距離からなる相対関係を算出する。次にS16において、幅算出手段22により、自車両の幅方向における前方車両の幅を算出する。
【0036】
次に、前方車両の相対距離が所定距離d以上の場合に、代表点を端点から重心点に補正する処理を行う。具体的には、まずS18において、代表点が重心点であるか判断する。判断がNo(代表点が端点)の場合にはS20に進み、自車両と前方車両との相対距離が所定距離d以上であるか判断する。判断がYes(相対距離がd以上)の場合には、代表点補正手段26により、代表点を端点から重心点に補正する。なお、S18の判断がYes(代表点が重心点)の場合、およびS20の判断がNo(相対距離がd未満)の場合には、代表点の補正を行わない。
【0037】
次に、前方車両の相対速度が自車に向かう方向であり且つ前方車両がレーダ走査範囲外に逸脱した場合に、代表点を重心点から端点に補正する処理を行う。具体的には、まずS24において、前回検知した前方車両の幅データがメモリ28に記録されているか判断する。判断がNo(初回検知)の場合にはS26に進み、S14で算出した前方車両との相対関係およびS16で算出した前方車両の幅をメモリ28に記録する。S24の判断がYes(2回目以降の検知)の場合にはS40に進み、逸脱判断手段24により逸脱判断を行う。
【0038】
図6は、逸脱判断サブルーチンのフローチャートである。まずS42において、前回検知した前方車両の幅をメモリ28から読み出す。次にS44において、前回検知した前方車両の幅と、S16において今回検知した幅とを比較して、前方車両の幅が減少したか判断する。判断がNoの場合には代表点の補正を行わない。判断がYesの場合には、前方車両の相対速度が自車に向かう方向であり且つ前方車両がレーダ走査範囲外に逸脱した場合であるから、代表点を重心点から端点に補正する。なお、S30において代表点が既に端点に設定されている場合には、代表点の補正を行わなくてもよい。
【0039】
図4に戻り、S28において、相対速度算出手段21により、自車両と前方車両との相対速度を算出する。具体的には、まず前回検知した前方車両と今回検知した前方車両との同一性判断(トラッキング処理)を行う。同一であると判断した場合には、前回算出した前方車両との相対位置と、S14において今回算出した相対位置とを用いて、相対速度を算出する。なお、前回算出時から今回算出時にかけて代表点が重心点および端点の一方から他方に変更された場合には、上述したように幅方向の相対速度の算出を行わないようにする。なお、前回算出した前方車両の相対位置を前方車両の幅の半分程度ずらしつつ、相対速度を算出してもよい。
【0040】
以上に詳述したように、本実施形態に係る車両用物体検知装置は、前方車両の反射点の配列に基づいて線分が2つ認識された場合には該線分の交点として算出される前方車両の端点を、線分が1つ認識された場合には該線分の重心点を代表点として算出し、前方車両の相対距離が所定距離以上の場合には、代表点を端点から重心点に補正する構成とした。
この構成によれば、前方車両が自車両の斜め前方に存在する場合には、手前面および自車両側の側面に沿った線分が2つ認識されるので、前方車両の自車両側の端点が代表点として算出される。そのため、前方車両の反対側の端点近傍がレーダ走査範囲外に逸脱した場合でも、代表点を設定し直す必要がなく、またレーダ走査範囲外に逸脱した前方車両の一部を補間して代表点を算出し直す必要もない。したがって、前方車両の相対位置および相対速度を精度良く算出することができる。
また、前方車両の相対距離が所定距離以上の場合に代表点を端点から重心点に補正する構成としたので、前方車両が遠方にあるため反射点の個数が少なく位置精度が低い場合でも、平均化処理して求めた重心点を代表点とすることが可能になり、代表点の位置精度を確保することができる。したがって、前方車両の相対位置および相対速度を精度良く算出することができる。
【図面の簡単な説明】
【0041】
【図1】実施形態に係る車両用物体検知装置のブロック図である。
【図2】代表点算出方法の説明図である。
【図3】代表点補正方法の説明図である。
【図4】実施形態に係る車両用物体検知方法のフローチャートである。
【図5】代表点算出サブルーチンのフローチャートである。
【図6】逸脱判断サブルーチンのフローチャートである。
【図7】従来技術に係る物体検知方法の説明図である。
【符号の説明】
【0042】
d…所定距離 5…自車両 10…車両用物体検知装置 12…レーダ(送受信手段) 13…レーダ走査範囲(所定範囲) 14…反射点算出手段 16…線分認識手段 18…代表点算出手段 20…相対関係算出手段 21…相対速度算出手段 22…幅算出手段 24…逸脱判断手段 26…代表点補正手段 77,86,87…前方車両(物体) 77a,86a…重心点 87a…端点
【特許請求の範囲】
【請求項1】
自車両周辺の所定範囲に電磁波を送信するとともに、前記自車両周辺に存在する物体からの反射波を受信する送受信手段と、
前記物体上における前記電磁波の反射点の位置を算出する反射点算出手段と、
前記反射点に基づいて前記物体の位置を表す代表点の位置を算出する代表点算出手段と、
前記代表点に基づいて前記自車両と前記物体との相対位置および相対距離からなる相対関係を算出する相対関係算出手段と、
前記相対位置に基づいて前記自車両と前記物体との相対速度を算出する相対速度算出手段と、を備えた車両用物体検知装置であって、
前記反射点の配列に基づいて前記物体の輪郭を構成する線分を認識する線分認識手段と、
前記相対距離に基づいて前記代表点の位置を補正する代表点補正手段と、を備え、
前記代表点算出手段は、前記線分認識手段により前記線分が2つ認識された場合には該線分の交点として算出される前記物体の端点を、前記線分が1つ認識された場合には該線分の重心点を前記代表点として算出し、
前記代表点補正手段は、前記相対距離が所定距離以上の場合に、前記代表点を前記端点から前記重心点に補正することを特徴とする車両用物体検知装置。
【請求項2】
前記反射点に基づいて前記自車両の幅方向における前記物体の幅を算出する幅算出手段と、
時系列で算出した前記物体の幅を比較し、前記物体の幅が減少している場合に、前記物体の一部が前記所定範囲外に逸脱したと判断する逸脱判断手段と、を備え、
前記代表点補正手段は、前記相対速度が自車両に向かう方向であり、且つ前記逸脱判断手段により前記物体の一部が前記所定範囲外に逸脱したと判断された場合に、前記代表点を前記重心点から前記端点に補正することを特徴とする請求項1に記載の車両用物体検知装置。
【請求項3】
前記相対速度算出手段は、前回の前記相対位置の算出時から今回の前記相対位置の算出時にかけて前記代表点が前記重心点および前記端点の一方から他方に変更された場合に、前記自車両の幅方向における前記相対速度の算出を行わないことを特徴とする請求項1または2に記載の車両用物体検知装置。
【請求項4】
前記反射点に基づいて前記自車両の幅方向における前記物体の幅を算出する幅算出手段を備え、
前記相対速度算出手段は、前回の前記相対位置の算出時から今回の前記相対位置の算出時にかけて前記代表点が前記重心点および前記端点の一方から他方に変更された場合に、前記幅算出手段により算出された前記物体の幅に基づいて前回算出した前記相対位置を補正しつつ、前記自車両の幅方向における前記相対速度を算出することを特徴とする請求項1または2に記載の車両用物体検知装置。
【請求項1】
自車両周辺の所定範囲に電磁波を送信するとともに、前記自車両周辺に存在する物体からの反射波を受信する送受信手段と、
前記物体上における前記電磁波の反射点の位置を算出する反射点算出手段と、
前記反射点に基づいて前記物体の位置を表す代表点の位置を算出する代表点算出手段と、
前記代表点に基づいて前記自車両と前記物体との相対位置および相対距離からなる相対関係を算出する相対関係算出手段と、
前記相対位置に基づいて前記自車両と前記物体との相対速度を算出する相対速度算出手段と、を備えた車両用物体検知装置であって、
前記反射点の配列に基づいて前記物体の輪郭を構成する線分を認識する線分認識手段と、
前記相対距離に基づいて前記代表点の位置を補正する代表点補正手段と、を備え、
前記代表点算出手段は、前記線分認識手段により前記線分が2つ認識された場合には該線分の交点として算出される前記物体の端点を、前記線分が1つ認識された場合には該線分の重心点を前記代表点として算出し、
前記代表点補正手段は、前記相対距離が所定距離以上の場合に、前記代表点を前記端点から前記重心点に補正することを特徴とする車両用物体検知装置。
【請求項2】
前記反射点に基づいて前記自車両の幅方向における前記物体の幅を算出する幅算出手段と、
時系列で算出した前記物体の幅を比較し、前記物体の幅が減少している場合に、前記物体の一部が前記所定範囲外に逸脱したと判断する逸脱判断手段と、を備え、
前記代表点補正手段は、前記相対速度が自車両に向かう方向であり、且つ前記逸脱判断手段により前記物体の一部が前記所定範囲外に逸脱したと判断された場合に、前記代表点を前記重心点から前記端点に補正することを特徴とする請求項1に記載の車両用物体検知装置。
【請求項3】
前記相対速度算出手段は、前回の前記相対位置の算出時から今回の前記相対位置の算出時にかけて前記代表点が前記重心点および前記端点の一方から他方に変更された場合に、前記自車両の幅方向における前記相対速度の算出を行わないことを特徴とする請求項1または2に記載の車両用物体検知装置。
【請求項4】
前記反射点に基づいて前記自車両の幅方向における前記物体の幅を算出する幅算出手段を備え、
前記相対速度算出手段は、前回の前記相対位置の算出時から今回の前記相対位置の算出時にかけて前記代表点が前記重心点および前記端点の一方から他方に変更された場合に、前記幅算出手段により算出された前記物体の幅に基づいて前回算出した前記相対位置を補正しつつ、前記自車両の幅方向における前記相対速度を算出することを特徴とする請求項1または2に記載の車両用物体検知装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2009−14479(P2009−14479A)
【公開日】平成21年1月22日(2009.1.22)
【国際特許分類】
【出願番号】特願2007−176094(P2007−176094)
【出願日】平成19年7月4日(2007.7.4)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
【公開日】平成21年1月22日(2009.1.22)
【国際特許分類】
【出願日】平成19年7月4日(2007.7.4)
【出願人】(000005326)本田技研工業株式会社 (23,863)
【Fターム(参考)】
[ Back to top ]