
車両用現在位置検出装置
【課題】角速度センサの出力値を車両の回転角速度に換算する比率を示す換算ゲインを精度良く補正する。
【解決手段】ナビゲーション装置10において、演算部22は、換算ゲインを用いジャイロ12の出力値に基づいて車両の方位変化量を算出する。演算部21は、車速センサ11の出力値に基づいて車両の移動距離を算出する。現在位置検出部14は、算出される方位変化量および移動距離に基づいて車両の現在位置や進行方向を算出する。誤差推定部25は、GPS受信機13からの出力値と現在位置検出部14での算出値との差を観測値として算出し、その観測値に基づいて換算ゲインの誤差を状態量として推定する。補正部26は、推定される状態量に基づいて換算ゲインを補正する。換算ゲインの誤差共分散値が所定値よりも大きい場合には、当該換算ゲインの誤差共分散値を所定値に置き換える。
【解決手段】ナビゲーション装置10において、演算部22は、換算ゲインを用いジャイロ12の出力値に基づいて車両の方位変化量を算出する。演算部21は、車速センサ11の出力値に基づいて車両の移動距離を算出する。現在位置検出部14は、算出される方位変化量および移動距離に基づいて車両の現在位置や進行方向を算出する。誤差推定部25は、GPS受信機13からの出力値と現在位置検出部14での算出値との差を観測値として算出し、その観測値に基づいて換算ゲインの誤差を状態量として推定する。補正部26は、推定される状態量に基づいて換算ゲインを補正する。換算ゲインの誤差共分散値が所定値よりも大きい場合には、当該換算ゲインの誤差共分散値を所定値に置き換える。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の進行方向および走行距離に基づいて車両の現在位置を検出する車両用現在位置検出装置に関する。
【背景技術】
【0002】
ジャイロスコープなどの角速度センサ(方位センサ)の出力情報を補正する技術に関して、例えば特許文献1には、以下のような車両用現在位置検出装置に関する技術が開示されている。この車両用現在位置検出装置は、車両の回転角速度に応じた信号を出力するジャイロスコープ(以下、ジャイロと称する)と、車両の走行速度に応じたパルス信号を出力する速度センサと、GPS(Global Positioning System)衛星からの送信電波を受信し、車両の位置、方位(進行方向)、速度などを出力するGPS受信機と、ジャイロ、速度センサ、GPS受信機からの出力に基づいて車両の現在位置や進行方向などのデータ(推測航法を行うためのデータ)を検出する現在位置検出部と、を備えている。
【0003】
そして、現在位置検出部は、速度センサからのパルス信号に基づいて車両の移動距離を算出する移動距離演算部と、ジャイロからの検出信号に基づいて車両の方位変化量を算出する方位変化量演算部と、算出された方位変化量と移動距離とに基づいて車両の相対軌跡および車速を算出する相対軌跡演算部と、同じく方位変化量と移動距離とに基づいて車両の絶対方位および絶対位置を算出する絶対位置演算部と、相対軌跡演算部および絶対位置演算部での算出値とGPS受信機での検出値との差を観測値として算出し、車速、方位、位置の算出に使用する各種算出パラメータや算出結果の誤差を状態量として、その状態量の推定値を求めるカルマンフィルタからなる誤差推定部と、誤差推定部により算出された状態量(即ち誤差)の推定値に従って、各演算部での算出パラメータや算出値を補正する補正部とを備えている。誤差推定部は、状態量の一つとして、ジャイロ出力から回転角速度への換算比率を示す換算ゲインの誤差(ゲイン誤差)を推定する。そして、補正部は、この誤差推定部により求められるゲイン誤差の推定値により、ジャイロ出力および換算ゲインを用いて算出された方位変化量を補正する。
ところで、この種の装置においては、車両が直進走行を継続した場合(車両が旋回しない場合)には車両に回転角速度が発生しないことから、換算ゲインの誤差を適切に推定することができず、その結果、換算ゲインが必要以上に補正されて精度が低下してしまう場合がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−55678号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そこで、本発明の目的は、角速度センサの出力値を車両の回転角速度に換算する比率を示す換算ゲインを精度良く補正することができる車両用現在位置検出装置を提供することにある。
【課題を解決するための手段】
【0006】
請求項1の車両用現在位置検出装置によれば、角速度センサは、車両の回転角速度に応じた信号を出力する。速度センサは、車両の走行速度に応じた信号を出力する。方位変化量算出手段は、前記角速度センサの出力値を前記回転角速度に換算する比率を示す換算ゲインを算出パラメータとして用い、前記角速度センサの出力値に基づいて車両の方位変化量を算出する。移動距離算出手段は、前記速度センサの出力値に基づいて車両の移動距離を算出する。現在位置算出手段は、前記方位変化量算出手段によって算出される方位変化量および前記移動距離算出手段によって算出される移動距離に基づいて車両の現在位置や進行方向を算出する。GPS受信機は、GPS衛星からの電波を受信し、車両の現在位置および進行方向を出力する。誤差推定手段は、前記GPS受信機からの出力値と前記現在位置算出手段での算出値との差を観測値として算出し、その観測値に基づいて前記換算ゲインの誤差を状態量として推定する。補正手段は、前記誤差推定手段によって推定される前記状態量に基づいて前記換算ゲインを補正する。そして、前記換算ゲインの誤差共分散値が所定値よりも大きい場合には、当該換算ゲインの誤差共分散値は前記所定値に置き換えられる。
これにより、換算ゲインが必要以上に補正されてしまうことがなくなり、当該換算ゲインの補正を精度良く行うことができる。
【0007】
請求項2の車両用現在位置検出装置によれば、誤差発生要因判定手段は、前記換算ゲインの誤差の発生要因を判定する。そして、前記所定値は、前記誤差発生要因判定手段によって判定された前記発生要因に基づいて設定される。
これにより、換算ゲインの誤差の発生要因に基づいて当該換算ゲインの補正量の度合いが誤差発生要因別に設定されるので、換算ゲインの補正を一層精度良く行うことができる。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施形態に係るものであり、車両用現在位置検出装置の構成を示すブロック図
【図2】カルマンフィルタの概要を示す図
【図3】推測航法処理の内容を示すフローチャート
【図4】方位変化量・移動距離の演算処理の内容を示すフローチャート
【図5】相対軌跡の演算処理の内容を示すフローチャート
【図6】絶対方位・絶対位置の演算処理の内容を示すフローチャート
【図7】GPSとの複合化処理の内容を示すフローチャート
【図8】学習度の更新処理の内容を示すフローチャート
【図9】システム雑音と誤差共分散との関係を示す図
【図10】(12)式に相当する行列式を示す図
【図11】(13)式に相当する行列式を示す図
【図12】観測過程で発生する雑音を定義する行列式を示す図
【図13】誤差共分散を定義する行列式を示す図
【図14】ジャイロスコープの出力値と回転角速度との関係および誤差の補正手順を示す説明図
【発明を実施するための形態】
【0009】
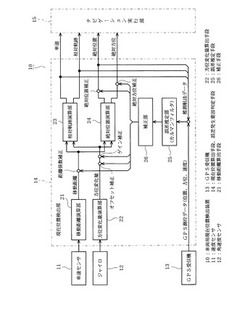
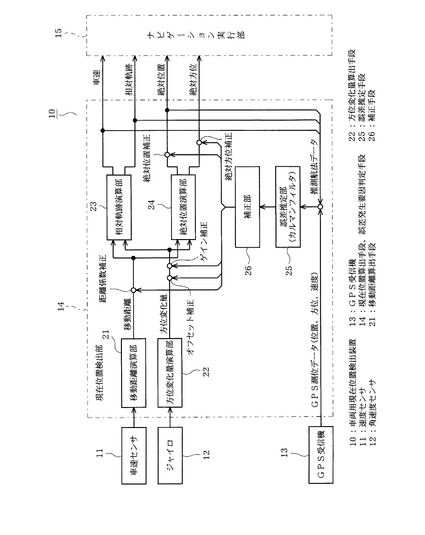
以下、本発明の一実施形態について図面を参照しながら説明する。図1に示すように、ナビゲーション装置10(車両用現在位置検出装置に相当)は、車両の走行速度に応じた間隔でパルス信号を出力する車速センサ11(速度センサに相当)と、車両に加わる回転運動の角速度に応じた検出信号を出力するジャイロスコープ12(角速度センサに相当、以下、単にジャイロと称する)と、GPS(Global Positioning System)用の人工衛星から送信される電波(衛星電波)をGPSアンテナ(図示せず)を介して受信し、車両の絶対的な位置,方位(進行方向),速度などを出力するGPS受信機13と、車速センサ11,ジャイロ12,GPS受信機13からの出力に基づいて車両の現在位置や進行方向などのデータ(推測航法を行うためのデータ)を検出する現在位置検出部14(現在位置算出手段に相当)と、現在位置検出部14での検出結果に基づき、表示画面(図示せず)の地図上に自車両の位置を表示したり、設定された目的地までの経路案内などを行うナビゲーション実行部15とを備えている。なお、現在位置検出部14およびナビゲーション実行部15は、周知のマイクロコンピュータを中心に構成された電子制御装置(ECU)の処理として実現されるものである。
【0010】
現在位置検出部14は、車速センサ11からのパルス信号に基づいて車両の移動距離を算出する移動距離演算部21(移動距離算出手段に相当)と、ジャイロ12からの検出信号に基づいて車両の方位変化量を算出する方位変化量演算部22(方位変化量算出手段に相当)と、算出された方位変化量と移動距離とに基づいて車両の相対軌跡および車速を算出する相対軌跡演算部23と、同じく方位変化量と移動距離とに基づいて車両の絶対方位および絶対位置を算出する絶対位置演算部24と、相対軌跡演算部23および絶対位置演算部24での算出値とGPS受信機13での検出値との差を観測値として算出し、車速,方位,位置の算出に使用する各種算出パラメータや算出結果の誤差を状態量として、その状態量の推定値を求めるカルマンフィルタからなる誤差推定部25(誤差推定手段に相当)と、誤差推定部25により算出された状態量(即ち誤差)の推定値に従って、各演算部21〜24での算出パラメータや算出値を補正する補正部26(補正手段に相当)とを備えている。
【0011】
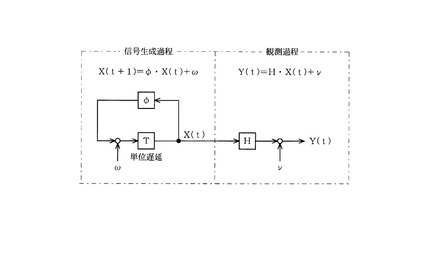
ここで、誤差推定部25を構成するカルマンフィルタの概要について説明する。図2に示すように、カルマンフィルタは、信号生成過程および観測過程からなる。即ち、カルマンフィルタは、プロセス行列φで定義される線形システム(信号生成過程)の状態X(t)に対して、観測行列Hで関係付けられた状態X(t)の一部が観測可能(観測過程)である場合に、この観測値Y(t)を入力として、状態X(t)の最適な推定値を与える。なお、ωは信号生成過程にて発生する雑音であり、νは観測過程にて発生する雑音である。
【0012】
そして、時刻tまでの情報を用いた状態Xの最適推定値、即ち、状態量X(t|t)は、次の(1)〜(5)式により求めることができる。
[式(1)]
X(t|t)=X(t|t−1)+K(t)[Y(t)−HX(t|t−1)]
[式(2)]
X(t|t−1)=φX(t−1|t−1)
[式(3)]
K(t)=P(t|t−1)HT[HP(t|t−1)HT+V]-1
[式(4)]
P(t|t−1)=φP(t−1|t−1)φT+W
[式(5)]
P(t−1|t−1)=[I−K(t−1)H]P(t−1|t−2)
なお、Kはカルマンゲインであり、Pは状態量Xの共分散(以下、誤差共分散と称する)であり、Vは観測過程で発生する雑音νの分散であり、Wは信号生成過程で発生する雑音ωの分散である。また、A(i|j)は時刻jまでの情報に基づく時刻iでのAの推定値である。なお、雑音ω,νは、いずれも平均0の白色ガウス雑音であり、互いに無相関である。また、Iは単位行列を意味し、添字の「T」は転置行列を意味し、添字の「−1」は逆行列を意味する。また、Wは本システムにおけるシステム雑音を意味する。
【0013】
このように定義されたカルマンフィルタでは、状態量Xを適当な初期状態に定義すると共に誤差共分散Pに適当な初期値を与え、その後、観測値Yに基づいて上述の計算を実行することにより、状態量の最適推定値X(t|t)が得られる。そして、観測が行われて観測値Yが得られるごとに計算を繰り返すことにより、状態量の最適推定値X(t|t)の精度が向上する。
【0014】
そして、本実施形態では、状態量Xとして、オフセット誤差(εG)、ゲイン誤差(εA)、距離係数誤差(εK)、絶対方位誤差(εθ)、絶対位置北方向誤差(εY)、絶対位置東方向誤差(εX)の6つの誤差値を用いる。
オフセット誤差(εG)は、ジャイロ12の出力値の大きさによらず、出力値の全領域にて均等に付加される誤差である。ゲイン誤差(εA)は、ジャイロ12の出力値を回転角速度に換算(変換)する比率として設定される換算ゲインの誤差である。距離係数誤差(εK)は、走行距離を算出する際に、車速センサ11から出力された単位時間当たりのパルス数に乗じられる距離係数の誤差である。絶対方位誤差(εθ)は、絶対方位を算出する際に上述のオフセット誤差(εG)、ゲイン誤差(εA)、距離係数誤差(εK)などに基づいて付与される誤差である。絶対位置北方向誤差(εY)および絶対位置東方向誤差(εX)は、絶対位置を算出する際に同様に付与される誤差である。これら誤差値εG,εA,εK,εθ,εY,εXは、次の(6)〜(11)式により定義される。
[式(6)]
εGt=εGt-1+ω0
[式(7)]
εAt=εAt-1+ω1
[式(8)]
εKt=εKt-1+ω2
[式(9)]
εθt=TT・εGt-1+DT・εAt-1+εθt-1+ω3
[式(10)]
εYt=sin(θ)・LT・(1+εKt-1)−sin(θT)・LT+εYt-1
[式(11)]
εXt=cos(θ)・LT・(1+εKt-1)−cos(θT)・LT+εXt-1
【0015】
なお、θは次の式により定義される。
θ=θT+εθt-1+TT・εGt-1/2+DT・εAt-1/2
また、TTは前回(前回の観測)からの経過時間であり、DTは前回からの方位変化量であり、LTは前回からの移動距離であり、θTは真の絶対方位である。
また、ω0は温度ドリフトなどによるオフセットの変動分(オフセット雑音と称する)であり、ω1は温度ドリフトなどによるジャイロゲインの変動分(ゲイン雑音と称する)であり、ω2は車速センサ11の経年変化による変動分(距離係数雑音と称する)であり、ω3はジャイロ12のクロスカップリングなどによる変動分(絶対方位雑音と称する)である。
【0016】
なお、(6)〜(8)式に示すように、オフセット誤差(εG)、ゲイン誤差(εA)、距離係数誤差(εK)については、確定的な変化はなく、前回の誤差にそれぞれノイズω0〜ω2が付加されたものとなっている。また、(9)式に示すように、絶対方位誤差(εθ)については、前回の誤差に、オフセット誤差(εG)に基づく方位誤差と、ゲイン誤差(εA)に基づく方位誤差と、ノイズω3が付加されたものとなっている。さらに、(10)式,(11)式に示すように、絶対位置誤差(εY),(εX)については、前回の誤差に、オフセット誤差(εG)および絶対方位誤差(εθ)に基づく方位誤差や距離係数誤差(εK)に基づく距離誤差によって生じる誤差が付加されたものとなっている。また、θは絶対位置演算部24にて算出される絶対方位を意味しており、真の絶対方位θTにセンサ誤差に基づく誤差が加わったものとなっている。
【0017】
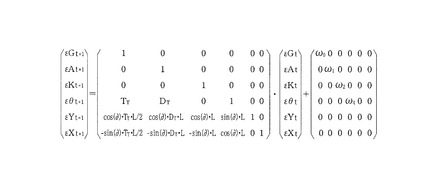
そして、これら誤差値εG,εA,εK,εθ,εY,εXの時間的な変化を規定するものがプロセス行列φであり、上記(6)〜(11)式を各誤差値にて偏微分し線形化することにより求められる。その結果、信号生成過程は、次に示す(12)式、即ち、図10に示す行列式により定義される。
[式(12)]
X(t+1)=φ・X(t)+W
【0018】
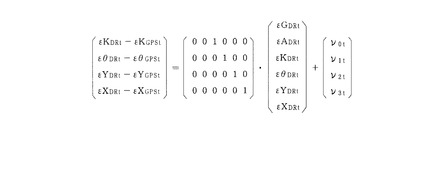
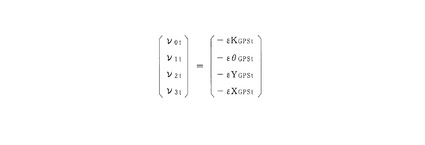
また、観測値Y(t)は、相対軌跡演算部23および絶対位置演算部24での算出値(以下、推測航法データと称する)と、GPS受信機13での検出値(以下、GPS測位データと称する)との差より求められる。それぞれの出力には誤差が含まれるため、観測値Y(t)において、推測航法データの誤差とGPS測位データの誤差との和が得られる。この観測値Y(t)と状態量X(t)とを関係付けることにより、観測過程は、次に示す(13)式、即ち、図11に示す行列式により定義される。
[式(13)]
Y(t)=H・X(t)+V
なお、観測過程で発生する雑音νは、GPS受信機13からの検出値に含まれる雑音であり、図12に示す行列式により定義される。
【0019】
このようなカルマンフィルタを有する現在位置検出部14では、移動距離演算部21が車速センサ11からの信号に基づいて車両の移動距離を算出し、方位変化量演算部22がジャイロ12からの信号に基づいて車両の方位変化量を算出する。すると、これら算出された移動距離および方位変化量に基づいて、相対軌跡演算部23および絶対位置演算部24が、推測航法データとして、車速,相対軌跡,絶対位置,絶対方位を算出する。一方、GPS受信機13は、GPS測位データとして、位置,方位,車速を随時出力している。
そして、誤差推定部25(カルマンフィルタ)は、推測航法データおよびGPS測位データに基づいて、各誤差εG,εA,εK,εθ,εY,εXの推定値を算出する。補正部26は、この推定値に基づいて、各演算部11〜14での算出パラメータや算出値の補正を行う。
【0020】
ところで、このように推定誤差に基づいて、車速センサ11の距離係数補正、ジャイロ12のオフセット補正,ゲイン補正、絶対方位補正、絶対位置補正を行った場合、(2)式に示す状態量の事前推定値X(t|t−1)は0となる。つまり、(1)式は次の(1a)式に示すようなものとなり、上述のように状態量Xとして定義された6つの誤差値は、この(1a)式および上述の(3)〜(5)式によって算出されることになる。
[式(1a)]
X(t|t)=X(t|t−1)+K(t)Y(t)
【0021】
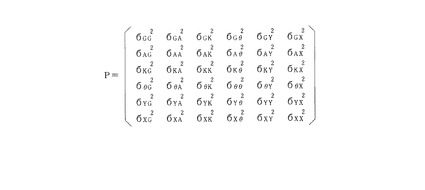
ここで、(3)〜(5)式にて用いられている誤差共分散Pは、図13に示すように定義される。
なお、図13に示すσGG2,σAA2,σKK2,σθθ2,σYY2,σXX2は、それぞれ各誤差εG,εA,εK,εθ,εY,εXの大きさの見積もりを表すものである。また、これら以外のσij2はi行とj列との相互相関値であり、例えばσAG2であれば、ゲイン誤差(εA)とオフセット誤差(εG)との相互相関値を表すものである。
この誤差共分散Pは上述の(4)式により更新される。但し、誤差共分散の初期値P(0|0)では、対角要素σij2(i=j)をそれぞれ誤差が最大となる値に設定し、それ以外の要素σij2(i≠j)を全て0に設定しておく。また、(3)式中の行列Hは(13)式にて定義されたものを使用する。同じく(3)式中の行列Vは図12に示す行列式にて定義されたものを使用する。さらに(4)式中の行列Wは(12)式にて定義されたものを使用する。
【0022】
次に、観測過程における観測値Y(t)としては、図11に示すように、εKDRt−εKGPSt、εθDRt−εθGPSt、εYDRt−εYGPSt、εXDRt−εXGPStを用いる。ここで、添字の「DRt」は時刻tにおける推測航法データに基づく値であることを意味し、添字の「GPSt」は時刻tにおけるGPS測位データに基づく値であることを意味する。
εKDRt−εKGPStは、推測航法データの速度とGPS測位データの速度との差から求まる距離係数誤差であり、具体的には、{(推測航法データの速度)−(GPS測位データの速度)}/(推測航法データの速度)により求められる。
εθDRt−εθGPStは、推測航法データの絶対方位とGPS測位データの方位との差を取ることにより得られる。即ち、推測航法データの絶対方位には真の絶対方位θTとその誤差εθDRtが含まれており、また、GPS測位データの方位には真の絶対方位θTとその誤差εθGPStが含まれている。そのため、それらの差を取ることによりεθDRt−εθGPStが得られる。
εYDRt−εYGPStは、推測航法データの絶対位置のY成分とGPS測位データの位置のY成分の誤差の差である。
εXDRt−εXGPStは、推測航法データの絶対位置のX成分とGPS測位データのX成分との誤差の差である。
【0023】
さらに、図12に示す行列式により定義される観測過程で発生する雑音νはGPS受信機13での雑音であり、以下のようにして求められる。即ち、GPS受信機13における擬似距離の計測誤差(UERE)とHDOP(Horizontal Dilution of Presision)の関係により、測位精度は、UERE×HDOPにより求められる。そして、この測位精度を2乗することにより、ν2t、ν3tが求められる。また、ドップラー周波数の計測誤差とHDOPの関係より、速度精度は、ドップラー周波数の計測誤差×HDOPにより求められる。そして、この速度精度/車速により距離係数計測誤差が求められ、これを2乗することによりν1tが求められる。さらに、車両の速度Vcと速度精度から方位精度が求められる。即ち、方位精度は、tan-1(速度精度/Vc)により求められる。そして、この方位精度を2乗することによりν0tが求められる。
【0024】
従って、観測過程におけるεKDRt−εKGPSt、εθDRt−εθGPSt、εYDRt−εYGPSt、εXDRt−εXGPStおよび上記雑音Vを入力として、上述の(3)〜(5)式および(1)式を実行することにより、信号生成過程にて定義された6つの誤差値εG,εA,εK,εθ,εY,εXからなる状態量Xが求められる。これらにより、車速センサ11の距離係数補正、ジャイロ12のオフセット補正,ゲイン補正、さらには、絶対位置補正、絶対方位補正が行われる。
【0025】
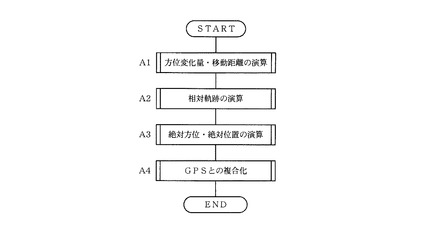
上述したように、現在位置検出部14は、マイクロコンピュータの処理として実現されるものである。以下、この現在位置検出部14が実行する推測航法処理を、図3〜図8に示すフローチャートに沿って説明する。なお、本処理は、一定周期TMで繰り返し実行される。
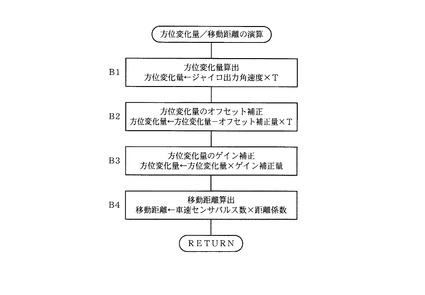
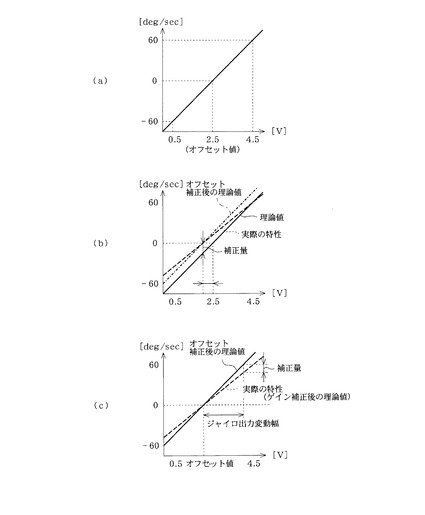
図3に示すように、まず、ステップA1では、現在位置検出部14は、移動距離演算部21および方位変化量演算部22により方位変化量・移動距離の演算処理を実行する。この演算処理の詳細を図4に沿って説明する。即ち、ステップB1では、ジャイロ12により検出されたジャイロ出力角速度にメインルーチンの起動周期TMを乗じることにより方位変化量を算出する。なお、ジャイロ出力角速度は、図14(a)のグラフから明らかなように、ジャイロ12の出力をサンプリングした値からオフセット値(この場合、2.5V)を減じたものに、換算ゲイン(グラフの傾きに相当)を乗じることにより算出されたものである。
次に、ステップB2では、後述するオフセット補正量にメインルーチンの起動周期TMを乗じたものを、ステップB1にて求めた方位変化量から減じることにより、方位変化量のオフセット補正を行う。即ち、図14(b)に示すように、角速度0[deg/sec]に対応するジャイロ12の出力電圧(ゼロ点)の変動に基づく誤差を補正する。
次に、ステップB3では、ステップB2にてオフセット補正された方位変化量に、後述するゲイン補正量を乗じることにより、方位変化量のゲイン補正を行う。即ち、図14(c)に示すように、グラフの傾き(換算ゲイン)の変動に基づく誤差を補正する。
次に、ステップB4では、本処理が前回起動されてから今回起動されるまでの間に検出された車速センサ11からの出力パルス数に、後述する距離係数を乗じることにより移動距離を算出する。以上により、方位変化量・移動距離の演算処理を終了する。
【0026】
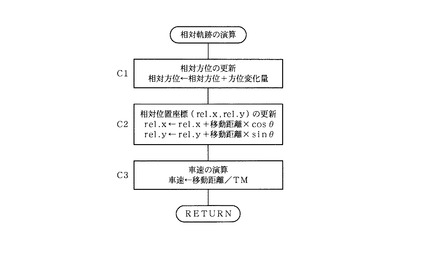
方位変化量・移動距離の演算処理を終了すると、現在位置検出部14は、図3のステップA2に移行し、相対軌跡演算部23により相対軌跡の演算処理を実行する。
この演算処理の詳細を図5に沿って説明する。即ち、ステップC1では、先のステップB3にて算出された方位変化量を、それまでに求められている相対方位に加算することにより、相対方位を更新する。次に、ステップC2では、この更新された相対方位、および、先のステップB4にて算出された移動距離に基づき、相対位置座標の更新を行う。具体的には、南北方向をx座標軸とした相対座標rel.xを次に示す(16)式に従って更新し、東西方向をy座標軸とした相対座標rel.yを次に示す(17)式に従って更新する。但し、θはステップC1にて算出された相対方位である。
[式(16)]
rel.x←rel.x+移動距離×cosθ
[式(17)]
rel.y←rel.y+移動距離×sinθ
【0027】
即ち、この更新は、移動距離に対する相対方位のx,y成分を、それまでの相対位置座標に加算することにより行っている。この相対位置座標は相対軌跡を求めるために行うもので、その相対軌跡と道路形状との関係により、いわゆるマップマッチングが行われる。
次に、ステップC3では、ステップB4にて算出された移動距離を、メインルーチンの起動周期TMで除することにより車速を算出する。以上により、相対軌跡の演算処理を終了する。
【0028】
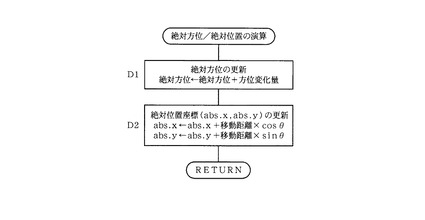
相対軌跡の演算処理を終了すると、現在位置検出部14は、図3のステップA3に移行し、絶対位置演算部24により絶対方位・絶対位置の演算処理を実行する。
この演算処理の詳細を図6に沿って説明する。即ち、ステップD1では、先のステップB3にて算出された方位変化量を、それまでに求められている絶対方位に加算することにより、絶対方位を更新する。次に、ステップD2では、この更新された絶対方位、および先のステップB4にて算出された移動距離に基づき、絶対位置座標の更新を行う。具体的には、南北方向をx座標軸とした絶対座標abs.xを次に示す(18)式に従って更新し、東西方向をy座標軸とした絶対座標abs.yを次に示す(19)式に従って更新する。但し、θはステップD1にて算出された絶対方位である。
[式(18)]
abs.x←abs.x+移動距離×cosθ
[式(19)]
abs.y←abs.y+移動距離×sinθ
【0029】
即ち、この更新は、移動距離に対する絶対方位のx,y成分を、それまでの絶対位置座標に加算することにより行っている。このようにして更新された絶対方位と絶対位置は後述するGPSとの複合化処理にて利用される。
【0030】
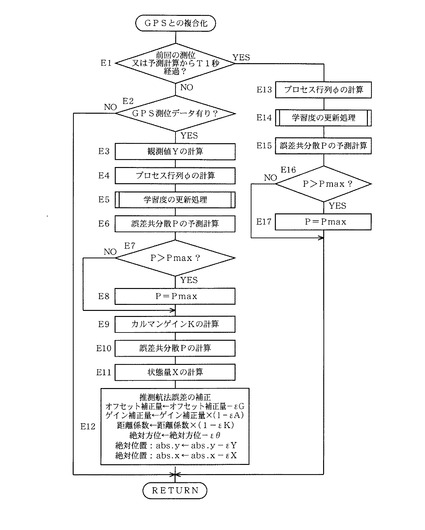
絶対方位・絶対位置の演算処理を終了すると、現在位置検出部14は、図3のステップA4に移行し、誤差推定部25および補正部26によりGPSとの複合化処理を実行する。この複合化処理の詳細を図7に沿って説明する。まず、ステップE1では、現在位置検出部14は、後述するGPS測位データに基づくカルマンフィルタの処理(ステップE3〜E12)または予測計算処理(ステップE13〜E17)が前回実行されてからT1秒経過したか否かを判定する。現在位置検出部14は、否定判定した場合(NO)にはステップE2に移行する。
ステップE2では、現在位置検出部14は、GPS受信機13が測位を行うことによりGPS受信機13からGPS測位データが入力されたか否かを判断する。現在位置検出部14は、肯定判定した場合(YES)には、ステップE3に移行して、誤差推定部25(カルマンフィルタ)による処理を開始する。一方、現在位置検出部14は、否定判定した場合(NO)には、そのまま本処理を終了する。
【0031】
ステップE3では、現在位置検出部14は、GPS受信機13からのGPS測位データ(速度,位置,方位)、および、先の推測航法処理により算出された推測航法データ(ステップC3により算出した車速,ステップD2により更新した絶対位置,ステップD1により更新した絶対方位)に基づいて観測値Y(εKDRt−εKGPSt、εθDRt−εθGPSt、εYDRt−εYGPSt、εXDRt−εXGPSt)の計算を行う。これと共に、観測過程で発生する雑音νをGPS受信機13のGPS測位データなどを基に計算する。
次に、現在位置検出部14は、ステップE4に移行し、プロセス行列φの計算を行う。このステップE4では、前回のプロセス行列の計算時点からの移動距離L、経過時間T(これらは図示しない計測処理により別途求められている)、および、ステップD1にて求めた絶対方位θにより、上記した(12)式に示すプロセス行列φを求める。
【0032】
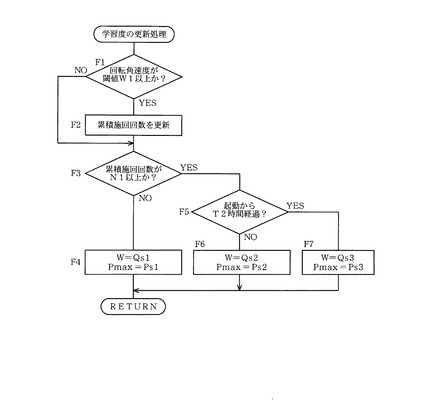
このようにして計算した観測値Yおよびプロセス行列φに基づき、以下では、上記した(3)〜(5)式の計算を行って(1a)式に示す状態量Xを求める。まず、現在位置検出部14は、ステップE5に移行して、学習度の更新処理を実行する。この更新処理の詳細を図8に沿って説明する。即ち、ステップF1では、現在位置検出部14は、ジャイロ12によって検出される回転角速度が閾値W1以上であるか否かを判断する。現在位置検出部14は、肯定判断をした場合(YES)には、ステップF2に移行して、累積旋回回数を更新する。この累積旋回回数は、車両にジャイロ12が取り付けられた後(例えば、車両の出荷後)において当該車両が旋回した回数(ジャイロ12によって検出される回転角速度が閾値W1以上となった回数)の累積値を記憶したものである。そして、現在位置検出部14は、累積旋回回数を更新すると、ステップF3に移行する。なお、現在位置検出部14は、ステップF1において否定判断した場合(NO)には、累積旋回回数を更新することなくステップF3に移行する。
【0033】
ステップF3では、現在位置検出部14は、累積旋回回数が閾値N1以上であるか否かを判断する(誤差発生要因判定手段に相当)。現在位置検出部14は、否定判断をした場合(NO)には、ステップF4に移行して、システム雑音WをQs1に設定するとともに、誤差共分散Pの上限値PmaxをPs1に設定する。
一方、現在位置検出部14は、ステップF3において肯定判断した場合(YES)には、ステップF5に移行して、ナビゲーション装置10が起動してからT2時間経過したか否かを判断する(誤差発生要因判定手段)。現在位置検出部14は、否定判断した場合(NO)には、ステップF6に移行して、システム雑音WをQs2に設定するとともに、誤差共分散Pの上限値PmaxをPs2に設定する。
一方、現在位置検出部14は、ステップF5において肯定判断した場合(YES)には、ステップF7に移行して、システム雑音WをQs3に設定するとともに、誤差共分散Pの上限値PmaxをPs3に設定する。
【0034】
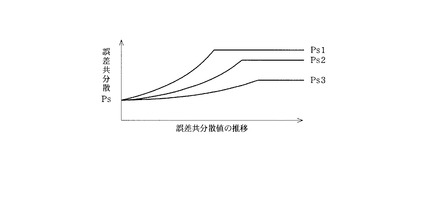
ここで、図9に示すように、上記のシステム雑音Wとして設定されるQs1,Qs2,Qs3は、Qs1>Qs2>Qs3の関係を満たすように設定される。また、上記の誤差共分散Pの上限値Pmaxとして設定されるPs1,Ps2,Ps3は、Ps1>Ps2>Ps3の関係を満たすように設定される。なお、システム雑音Wの値が大きいほど、誤差共分散Pの増加は急峻となる。
【0035】
車両にジャイロ12が取り付けられてから間もない場合、即ち、車両の累積旋回回数が少ない場合(ステップF3にてNO)には、換算ゲインの誤差の発生要因としては、ジャイロ12の取り付け角度の誤差(ジャイロ12の検出軸が傾いた状態で設置されることに基づく誤差)、或いは、ジャイロ12の製造ばらつきの誤差(ジャイロ12が製造される過程で各製品に固有に発生する誤差)が主な要因となる。このような要因により発生する誤差(オフセット性の誤差)は、変動するものではなく、補正をしなければ一定の誤差が発生し続けるが、補正をすれば除去することができ誤差が発生し続けることはない。そのため、このような誤差は早急に補正しておくことが望ましい。そこで、現在位置検出部14は、車両の累積旋回回数が少ない場合(ステップF3にてNO)には、システム雑音Wを大きく設定し(システム雑音W=Qs1)、また、誤差共分散Pの上限値Pmaxを大きく設定する(誤差共分散Pの上限値Pmax=Ps1)。これにより、換算ゲインの誤差の補正量が大きくなり、換算ゲインを迅速に補正することができる。
【0036】
一方、車両にジャイロ12が取り付けられてからある程度の時間が経過し、換算ゲインの補正もある程度繰り返された場合(ステップF3にてYES)には、換算ゲインの誤差の発生要因としては、温度変化に伴う誤差(ジャイロ12自体の温度変化に起因する誤差)が主な要因となる。このような要因により発生する誤差は、温度に応じて変動するものであり、補正をしたとしても、その後の温度変化により誤差が再び生じ得る。そのため、このような誤差は実際の状況(温度状況)に応じて随時補正することが望ましい。そこで、現在位置検出部14は、換算ゲインの補正がある程度繰り返された後においては、システム雑音Wを小さく設定し(システム雑音W=Qs2,Qs3)、また、誤差共分散Pの上限値Pmaxを小さく設定する(誤差共分散Pの上限値Pmax=Ps2,Ps3)。これにより、換算ゲインの誤差の補正量は小さくなるが、換算ゲインを実際の温度状況に応じてきめ細かく補正することができる。
【0037】
なお、ジャイロ12の温度は、ナビゲーション装置10が起動した後に徐々に上昇し始め、ある温度でほぼ一定に収束する傾向にある。そのため、起動からある程度の時間(この場合、T2時間)が経過していない場合(ステップF5にてNO)には、現在位置検出部14は、ジャイロ12の温度が上昇中(温度変化中)であると判断し、システム雑音WをQs3よりも大きめに設定し(システム雑音W=Qs2)、また、誤差共分散Pの上限値PmaxをPs3よりも大きめに設定する(誤差共分散Pの上限値Pmax=Ps2)。これにより、換算ゲインの誤差の補正量が比較的大きくなり、換算ゲインを温度変化に追従させながら補正することができる。
【0038】
一方、ナビゲーション装置10の起動からある程度の時間(T2時間)が経過した場合(ステップF5にてYES)には、現在位置検出部14は、ジャイロ12の温度がほぼ一定に収束したと判断し、システム雑音WをQs2よりも小さく設定し(システム雑音W=Qs3)、また、誤差共分散Pの上限値PmaxをPs2よりも小さく設定する(誤差共分散Pの上限値=Ps3)。これにより、換算ゲインの誤差の補正量が比較的小さくなり、収束した一定温度に応じて換算ゲインを精度良く補正することができる。また、ジャイロ12の温度がほぼ一定に収束し補正量を大きくする必要がない場合に、必要以上に補正量が大きくなってしまうことがない。
【0039】
以上のように換算ゲインの誤差の発生要因に基づいてシステム雑音Wおよび誤差共分散Pの上限値Pmaxの値を設定すると、現在位置検出部14は、学習度の更新処理を終了する。そして、図7のステップE6に移行して、(4)式により誤差共分散Pの予測計算を行う。そして、現在位置検出部14は、ステップE7に移行し、算出した誤差共分散Pの値が、上記のステップF4,F6,F7の何れかにて設定した誤差共分散Pの上限値Pmaxの値よりも大きいか否かを判断する。現在位置検出部14は、肯定判断した場合(YES)には、ステップE8に移行して、誤差共分散Pの値を上限値Pmaxに置き換える。そして、ステップE9に移行する。一方、現在位置検出部14は、ステップE7において否定判断した場合(NO)には、誤差共分差Pの値を上限値Pmaxに置き換えることなく、ステップE9に移行する。
【0040】
ステップE9では、現在位置検出部14は、(3)式によりカルマンゲインKの計算を行う。続くステップE10では、現在位置検出部14は、(5)式により誤差共分散Pの計算を行う。続くステップE11では、現在位置検出部14は、算出したカルマンゲインKおよび観測値Yに基づき、(1a)式により状態量Xを求める。この状態量Xは、(12)式の左辺に示すオフセット誤差(εG)、ゲイン誤差(εA),絶対方位誤差(εθ)、距離係数誤差(εK)、絶対位置北方向誤差(εY)、絶対位置東方向誤差(εX)を表している。
【0041】
そして、ステップE12では、状態量Xとして算出されたこれらの誤差値εG,εA,εK,εθ,εY,εXに基づき、推測航法誤差の補正(ジャイロ12のオフセット補正、同じくゲイン補正、車速センサ11の距離係数補正、絶対方位補正、絶対位置補正)を、次に示す(20)〜(25)式に従って行う。
[式(20)]
オフセット補正量=オフセット補正量−εG
[式(21)]
ゲイン補正量=ゲイン補正量×(1−εA)
[式(22)]
距離係数=距離係数×(1−εK)
[式(23)]
絶対方位=絶対方位−εθ
[式(24)]
abs.y(絶対位置)=abs.y−εY
[式(25)]
abs.x(絶対位置)=abs.x−εX
【0042】
即ち、ジャイロ12のオフセット補正およびゲイン補正により、ステップB2,B3にて用いられるオフセット補正量およびゲイン補正量が修正される。車速センサ11の距離係数補正により、ステップB4にて用いられる距離係数が修正される。絶対方位補正により、ステップD1にて用いられる絶対方位θが修正される。絶対位置補正により、ステップD2にて用いられる絶対位置が修正される。
そして、上記ステップE3〜E12の処理が、GPS受信機13からのGPS測位データが有るごとに繰り返されることにより、上記誤差が随時修正される。これにより、一層正確な推測航法データが得られることになる。
【0043】
なお、GPS受信機13からのGPS測位データが長時間(T1秒以上)に渡って得ることができず、先のステップE1にて肯定判定された場合(YES)には、現在位置検出部14は、プロセス行列φの計算(ステップE13)、学習度の更新処理(ステップE14)、誤差共分散Pの予測計算(ステップE15)を行い、算出した誤差共分散Pの値が設定した誤差共分散Pの上限値Pmaxの値よりも大きい場合には誤差共分散Pの値を上限値Pmaxに置き換える(ステップE16,E17)。なお、ステップE14における処理は、上述のステップE5における学習度の更新処理(図8参照)と同様の内容である。
GPS受信機13からGPS測位データが得られない場合、何も補正を行わないと誤差が大きくなってしまう。そのため、上記のステップE13〜E17の処理を実行することにより、誤差共分散Pの予測計算、即ち、誤差の見積もりと、システム雑音Wおよび誤差共分散Pの上限値Pmaxの設定については、定期的に行っておく。これにより、その後にGPS受信機13からのGPS測位データの入力が再開された時に行われるカルマンフィルタの処理を正確に行うことができる。
【0044】
以上に説明したように本実施形態によれば、誤差共分散Pに上限値Pmaxを設定し、算出された誤差共分散Pの値が設定した上限値Pmaxよりも大きい場合には、誤差共分差Pの値を上限値Pmaxに置き換えるように構成した。これにより、ジャイロ12の出力値を車両の回転角速度に換算する比率を示す換算ゲインが必要以上に補正されてしまうことがなくなり、当該換算ゲインの補正を精度良く行うことができる。
また、換算ゲインの誤差の発生要因に基づいて誤差共分散Pの上限値Pmax、換言すれば、換算ゲインの補正量の度合い(上限値)を誤差発生要因別に異なる値に設定するように構成した。これにより、換算ゲインの補正量を誤差の発生要因に応じた量とすることができ、換算ゲインの補正を一層精度良く行うことができる。
【0045】
なお、本発明は、上述した一実施形態にのみ限定されるものではなく、例えば次のように変形または拡張することができる。
システム雑音Wとして設定されるQs1,Qs2,Qs3の具体的な値、および、誤差共分散Pの上限値Pmaxとして設定されるPs1,Ps2,Ps3の具体的な値は、例えばナビゲーション装置10やジャイロ12の性能などに応じて適宜変更して設定することができる。また、推測航法処理における時間T1,T2、閾値W1,N1などの値は、適宜変更して設定することができる。
例えばジャイロ12を取り付け直した場合、つまり、ジャイロ12の取り付け角度が変化してしまうような場合には、記憶している累積旋回回数をリセットすることで、図8に示すステップF3,F4の処理、即ち、オフセット性の誤差を補正する処理を再び実行するようにするとよい。
【符号の説明】
【0046】
図面中、10はナビゲーション装置(車両用現在位置検出装置)、11は車速センサ(速度センサ)、12はジャイロスコープ(角速度センサ)、13はGPS受信機、14は現在位置検出部(現在位置算出手段、誤差発生要因判定手段)、21は移動距離演算部(移動距離算出手段)、22は方位変化量演算部(方位変化量算出手段)、25は誤差推定部(誤差推定手段)、26は補正部(補正手段)を示す。
【技術分野】
【0001】
本発明は、車両の進行方向および走行距離に基づいて車両の現在位置を検出する車両用現在位置検出装置に関する。
【背景技術】
【0002】
ジャイロスコープなどの角速度センサ(方位センサ)の出力情報を補正する技術に関して、例えば特許文献1には、以下のような車両用現在位置検出装置に関する技術が開示されている。この車両用現在位置検出装置は、車両の回転角速度に応じた信号を出力するジャイロスコープ(以下、ジャイロと称する)と、車両の走行速度に応じたパルス信号を出力する速度センサと、GPS(Global Positioning System)衛星からの送信電波を受信し、車両の位置、方位(進行方向)、速度などを出力するGPS受信機と、ジャイロ、速度センサ、GPS受信機からの出力に基づいて車両の現在位置や進行方向などのデータ(推測航法を行うためのデータ)を検出する現在位置検出部と、を備えている。
【0003】
そして、現在位置検出部は、速度センサからのパルス信号に基づいて車両の移動距離を算出する移動距離演算部と、ジャイロからの検出信号に基づいて車両の方位変化量を算出する方位変化量演算部と、算出された方位変化量と移動距離とに基づいて車両の相対軌跡および車速を算出する相対軌跡演算部と、同じく方位変化量と移動距離とに基づいて車両の絶対方位および絶対位置を算出する絶対位置演算部と、相対軌跡演算部および絶対位置演算部での算出値とGPS受信機での検出値との差を観測値として算出し、車速、方位、位置の算出に使用する各種算出パラメータや算出結果の誤差を状態量として、その状態量の推定値を求めるカルマンフィルタからなる誤差推定部と、誤差推定部により算出された状態量(即ち誤差)の推定値に従って、各演算部での算出パラメータや算出値を補正する補正部とを備えている。誤差推定部は、状態量の一つとして、ジャイロ出力から回転角速度への換算比率を示す換算ゲインの誤差(ゲイン誤差)を推定する。そして、補正部は、この誤差推定部により求められるゲイン誤差の推定値により、ジャイロ出力および換算ゲインを用いて算出された方位変化量を補正する。
ところで、この種の装置においては、車両が直進走行を継続した場合(車両が旋回しない場合)には車両に回転角速度が発生しないことから、換算ゲインの誤差を適切に推定することができず、その結果、換算ゲインが必要以上に補正されて精度が低下してしまう場合がある。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2000−55678号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
そこで、本発明の目的は、角速度センサの出力値を車両の回転角速度に換算する比率を示す換算ゲインを精度良く補正することができる車両用現在位置検出装置を提供することにある。
【課題を解決するための手段】
【0006】
請求項1の車両用現在位置検出装置によれば、角速度センサは、車両の回転角速度に応じた信号を出力する。速度センサは、車両の走行速度に応じた信号を出力する。方位変化量算出手段は、前記角速度センサの出力値を前記回転角速度に換算する比率を示す換算ゲインを算出パラメータとして用い、前記角速度センサの出力値に基づいて車両の方位変化量を算出する。移動距離算出手段は、前記速度センサの出力値に基づいて車両の移動距離を算出する。現在位置算出手段は、前記方位変化量算出手段によって算出される方位変化量および前記移動距離算出手段によって算出される移動距離に基づいて車両の現在位置や進行方向を算出する。GPS受信機は、GPS衛星からの電波を受信し、車両の現在位置および進行方向を出力する。誤差推定手段は、前記GPS受信機からの出力値と前記現在位置算出手段での算出値との差を観測値として算出し、その観測値に基づいて前記換算ゲインの誤差を状態量として推定する。補正手段は、前記誤差推定手段によって推定される前記状態量に基づいて前記換算ゲインを補正する。そして、前記換算ゲインの誤差共分散値が所定値よりも大きい場合には、当該換算ゲインの誤差共分散値は前記所定値に置き換えられる。
これにより、換算ゲインが必要以上に補正されてしまうことがなくなり、当該換算ゲインの補正を精度良く行うことができる。
【0007】
請求項2の車両用現在位置検出装置によれば、誤差発生要因判定手段は、前記換算ゲインの誤差の発生要因を判定する。そして、前記所定値は、前記誤差発生要因判定手段によって判定された前記発生要因に基づいて設定される。
これにより、換算ゲインの誤差の発生要因に基づいて当該換算ゲインの補正量の度合いが誤差発生要因別に設定されるので、換算ゲインの補正を一層精度良く行うことができる。
【図面の簡単な説明】
【0008】
【図1】本発明の一実施形態に係るものであり、車両用現在位置検出装置の構成を示すブロック図
【図2】カルマンフィルタの概要を示す図
【図3】推測航法処理の内容を示すフローチャート
【図4】方位変化量・移動距離の演算処理の内容を示すフローチャート
【図5】相対軌跡の演算処理の内容を示すフローチャート
【図6】絶対方位・絶対位置の演算処理の内容を示すフローチャート
【図7】GPSとの複合化処理の内容を示すフローチャート
【図8】学習度の更新処理の内容を示すフローチャート
【図9】システム雑音と誤差共分散との関係を示す図
【図10】(12)式に相当する行列式を示す図
【図11】(13)式に相当する行列式を示す図
【図12】観測過程で発生する雑音を定義する行列式を示す図
【図13】誤差共分散を定義する行列式を示す図
【図14】ジャイロスコープの出力値と回転角速度との関係および誤差の補正手順を示す説明図
【発明を実施するための形態】
【0009】
以下、本発明の一実施形態について図面を参照しながら説明する。図1に示すように、ナビゲーション装置10(車両用現在位置検出装置に相当)は、車両の走行速度に応じた間隔でパルス信号を出力する車速センサ11(速度センサに相当)と、車両に加わる回転運動の角速度に応じた検出信号を出力するジャイロスコープ12(角速度センサに相当、以下、単にジャイロと称する)と、GPS(Global Positioning System)用の人工衛星から送信される電波(衛星電波)をGPSアンテナ(図示せず)を介して受信し、車両の絶対的な位置,方位(進行方向),速度などを出力するGPS受信機13と、車速センサ11,ジャイロ12,GPS受信機13からの出力に基づいて車両の現在位置や進行方向などのデータ(推測航法を行うためのデータ)を検出する現在位置検出部14(現在位置算出手段に相当)と、現在位置検出部14での検出結果に基づき、表示画面(図示せず)の地図上に自車両の位置を表示したり、設定された目的地までの経路案内などを行うナビゲーション実行部15とを備えている。なお、現在位置検出部14およびナビゲーション実行部15は、周知のマイクロコンピュータを中心に構成された電子制御装置(ECU)の処理として実現されるものである。
【0010】
現在位置検出部14は、車速センサ11からのパルス信号に基づいて車両の移動距離を算出する移動距離演算部21(移動距離算出手段に相当)と、ジャイロ12からの検出信号に基づいて車両の方位変化量を算出する方位変化量演算部22(方位変化量算出手段に相当)と、算出された方位変化量と移動距離とに基づいて車両の相対軌跡および車速を算出する相対軌跡演算部23と、同じく方位変化量と移動距離とに基づいて車両の絶対方位および絶対位置を算出する絶対位置演算部24と、相対軌跡演算部23および絶対位置演算部24での算出値とGPS受信機13での検出値との差を観測値として算出し、車速,方位,位置の算出に使用する各種算出パラメータや算出結果の誤差を状態量として、その状態量の推定値を求めるカルマンフィルタからなる誤差推定部25(誤差推定手段に相当)と、誤差推定部25により算出された状態量(即ち誤差)の推定値に従って、各演算部21〜24での算出パラメータや算出値を補正する補正部26(補正手段に相当)とを備えている。
【0011】
ここで、誤差推定部25を構成するカルマンフィルタの概要について説明する。図2に示すように、カルマンフィルタは、信号生成過程および観測過程からなる。即ち、カルマンフィルタは、プロセス行列φで定義される線形システム(信号生成過程)の状態X(t)に対して、観測行列Hで関係付けられた状態X(t)の一部が観測可能(観測過程)である場合に、この観測値Y(t)を入力として、状態X(t)の最適な推定値を与える。なお、ωは信号生成過程にて発生する雑音であり、νは観測過程にて発生する雑音である。
【0012】
そして、時刻tまでの情報を用いた状態Xの最適推定値、即ち、状態量X(t|t)は、次の(1)〜(5)式により求めることができる。
[式(1)]
X(t|t)=X(t|t−1)+K(t)[Y(t)−HX(t|t−1)]
[式(2)]
X(t|t−1)=φX(t−1|t−1)
[式(3)]
K(t)=P(t|t−1)HT[HP(t|t−1)HT+V]-1
[式(4)]
P(t|t−1)=φP(t−1|t−1)φT+W
[式(5)]
P(t−1|t−1)=[I−K(t−1)H]P(t−1|t−2)
なお、Kはカルマンゲインであり、Pは状態量Xの共分散(以下、誤差共分散と称する)であり、Vは観測過程で発生する雑音νの分散であり、Wは信号生成過程で発生する雑音ωの分散である。また、A(i|j)は時刻jまでの情報に基づく時刻iでのAの推定値である。なお、雑音ω,νは、いずれも平均0の白色ガウス雑音であり、互いに無相関である。また、Iは単位行列を意味し、添字の「T」は転置行列を意味し、添字の「−1」は逆行列を意味する。また、Wは本システムにおけるシステム雑音を意味する。
【0013】
このように定義されたカルマンフィルタでは、状態量Xを適当な初期状態に定義すると共に誤差共分散Pに適当な初期値を与え、その後、観測値Yに基づいて上述の計算を実行することにより、状態量の最適推定値X(t|t)が得られる。そして、観測が行われて観測値Yが得られるごとに計算を繰り返すことにより、状態量の最適推定値X(t|t)の精度が向上する。
【0014】
そして、本実施形態では、状態量Xとして、オフセット誤差(εG)、ゲイン誤差(εA)、距離係数誤差(εK)、絶対方位誤差(εθ)、絶対位置北方向誤差(εY)、絶対位置東方向誤差(εX)の6つの誤差値を用いる。
オフセット誤差(εG)は、ジャイロ12の出力値の大きさによらず、出力値の全領域にて均等に付加される誤差である。ゲイン誤差(εA)は、ジャイロ12の出力値を回転角速度に換算(変換)する比率として設定される換算ゲインの誤差である。距離係数誤差(εK)は、走行距離を算出する際に、車速センサ11から出力された単位時間当たりのパルス数に乗じられる距離係数の誤差である。絶対方位誤差(εθ)は、絶対方位を算出する際に上述のオフセット誤差(εG)、ゲイン誤差(εA)、距離係数誤差(εK)などに基づいて付与される誤差である。絶対位置北方向誤差(εY)および絶対位置東方向誤差(εX)は、絶対位置を算出する際に同様に付与される誤差である。これら誤差値εG,εA,εK,εθ,εY,εXは、次の(6)〜(11)式により定義される。
[式(6)]
εGt=εGt-1+ω0
[式(7)]
εAt=εAt-1+ω1
[式(8)]
εKt=εKt-1+ω2
[式(9)]
εθt=TT・εGt-1+DT・εAt-1+εθt-1+ω3
[式(10)]
εYt=sin(θ)・LT・(1+εKt-1)−sin(θT)・LT+εYt-1
[式(11)]
εXt=cos(θ)・LT・(1+εKt-1)−cos(θT)・LT+εXt-1
【0015】
なお、θは次の式により定義される。
θ=θT+εθt-1+TT・εGt-1/2+DT・εAt-1/2
また、TTは前回(前回の観測)からの経過時間であり、DTは前回からの方位変化量であり、LTは前回からの移動距離であり、θTは真の絶対方位である。
また、ω0は温度ドリフトなどによるオフセットの変動分(オフセット雑音と称する)であり、ω1は温度ドリフトなどによるジャイロゲインの変動分(ゲイン雑音と称する)であり、ω2は車速センサ11の経年変化による変動分(距離係数雑音と称する)であり、ω3はジャイロ12のクロスカップリングなどによる変動分(絶対方位雑音と称する)である。
【0016】
なお、(6)〜(8)式に示すように、オフセット誤差(εG)、ゲイン誤差(εA)、距離係数誤差(εK)については、確定的な変化はなく、前回の誤差にそれぞれノイズω0〜ω2が付加されたものとなっている。また、(9)式に示すように、絶対方位誤差(εθ)については、前回の誤差に、オフセット誤差(εG)に基づく方位誤差と、ゲイン誤差(εA)に基づく方位誤差と、ノイズω3が付加されたものとなっている。さらに、(10)式,(11)式に示すように、絶対位置誤差(εY),(εX)については、前回の誤差に、オフセット誤差(εG)および絶対方位誤差(εθ)に基づく方位誤差や距離係数誤差(εK)に基づく距離誤差によって生じる誤差が付加されたものとなっている。また、θは絶対位置演算部24にて算出される絶対方位を意味しており、真の絶対方位θTにセンサ誤差に基づく誤差が加わったものとなっている。
【0017】
そして、これら誤差値εG,εA,εK,εθ,εY,εXの時間的な変化を規定するものがプロセス行列φであり、上記(6)〜(11)式を各誤差値にて偏微分し線形化することにより求められる。その結果、信号生成過程は、次に示す(12)式、即ち、図10に示す行列式により定義される。
[式(12)]
X(t+1)=φ・X(t)+W
【0018】
また、観測値Y(t)は、相対軌跡演算部23および絶対位置演算部24での算出値(以下、推測航法データと称する)と、GPS受信機13での検出値(以下、GPS測位データと称する)との差より求められる。それぞれの出力には誤差が含まれるため、観測値Y(t)において、推測航法データの誤差とGPS測位データの誤差との和が得られる。この観測値Y(t)と状態量X(t)とを関係付けることにより、観測過程は、次に示す(13)式、即ち、図11に示す行列式により定義される。
[式(13)]
Y(t)=H・X(t)+V
なお、観測過程で発生する雑音νは、GPS受信機13からの検出値に含まれる雑音であり、図12に示す行列式により定義される。
【0019】
このようなカルマンフィルタを有する現在位置検出部14では、移動距離演算部21が車速センサ11からの信号に基づいて車両の移動距離を算出し、方位変化量演算部22がジャイロ12からの信号に基づいて車両の方位変化量を算出する。すると、これら算出された移動距離および方位変化量に基づいて、相対軌跡演算部23および絶対位置演算部24が、推測航法データとして、車速,相対軌跡,絶対位置,絶対方位を算出する。一方、GPS受信機13は、GPS測位データとして、位置,方位,車速を随時出力している。
そして、誤差推定部25(カルマンフィルタ)は、推測航法データおよびGPS測位データに基づいて、各誤差εG,εA,εK,εθ,εY,εXの推定値を算出する。補正部26は、この推定値に基づいて、各演算部11〜14での算出パラメータや算出値の補正を行う。
【0020】
ところで、このように推定誤差に基づいて、車速センサ11の距離係数補正、ジャイロ12のオフセット補正,ゲイン補正、絶対方位補正、絶対位置補正を行った場合、(2)式に示す状態量の事前推定値X(t|t−1)は0となる。つまり、(1)式は次の(1a)式に示すようなものとなり、上述のように状態量Xとして定義された6つの誤差値は、この(1a)式および上述の(3)〜(5)式によって算出されることになる。
[式(1a)]
X(t|t)=X(t|t−1)+K(t)Y(t)
【0021】
ここで、(3)〜(5)式にて用いられている誤差共分散Pは、図13に示すように定義される。
なお、図13に示すσGG2,σAA2,σKK2,σθθ2,σYY2,σXX2は、それぞれ各誤差εG,εA,εK,εθ,εY,εXの大きさの見積もりを表すものである。また、これら以外のσij2はi行とj列との相互相関値であり、例えばσAG2であれば、ゲイン誤差(εA)とオフセット誤差(εG)との相互相関値を表すものである。
この誤差共分散Pは上述の(4)式により更新される。但し、誤差共分散の初期値P(0|0)では、対角要素σij2(i=j)をそれぞれ誤差が最大となる値に設定し、それ以外の要素σij2(i≠j)を全て0に設定しておく。また、(3)式中の行列Hは(13)式にて定義されたものを使用する。同じく(3)式中の行列Vは図12に示す行列式にて定義されたものを使用する。さらに(4)式中の行列Wは(12)式にて定義されたものを使用する。
【0022】
次に、観測過程における観測値Y(t)としては、図11に示すように、εKDRt−εKGPSt、εθDRt−εθGPSt、εYDRt−εYGPSt、εXDRt−εXGPStを用いる。ここで、添字の「DRt」は時刻tにおける推測航法データに基づく値であることを意味し、添字の「GPSt」は時刻tにおけるGPS測位データに基づく値であることを意味する。
εKDRt−εKGPStは、推測航法データの速度とGPS測位データの速度との差から求まる距離係数誤差であり、具体的には、{(推測航法データの速度)−(GPS測位データの速度)}/(推測航法データの速度)により求められる。
εθDRt−εθGPStは、推測航法データの絶対方位とGPS測位データの方位との差を取ることにより得られる。即ち、推測航法データの絶対方位には真の絶対方位θTとその誤差εθDRtが含まれており、また、GPS測位データの方位には真の絶対方位θTとその誤差εθGPStが含まれている。そのため、それらの差を取ることによりεθDRt−εθGPStが得られる。
εYDRt−εYGPStは、推測航法データの絶対位置のY成分とGPS測位データの位置のY成分の誤差の差である。
εXDRt−εXGPStは、推測航法データの絶対位置のX成分とGPS測位データのX成分との誤差の差である。
【0023】
さらに、図12に示す行列式により定義される観測過程で発生する雑音νはGPS受信機13での雑音であり、以下のようにして求められる。即ち、GPS受信機13における擬似距離の計測誤差(UERE)とHDOP(Horizontal Dilution of Presision)の関係により、測位精度は、UERE×HDOPにより求められる。そして、この測位精度を2乗することにより、ν2t、ν3tが求められる。また、ドップラー周波数の計測誤差とHDOPの関係より、速度精度は、ドップラー周波数の計測誤差×HDOPにより求められる。そして、この速度精度/車速により距離係数計測誤差が求められ、これを2乗することによりν1tが求められる。さらに、車両の速度Vcと速度精度から方位精度が求められる。即ち、方位精度は、tan-1(速度精度/Vc)により求められる。そして、この方位精度を2乗することによりν0tが求められる。
【0024】
従って、観測過程におけるεKDRt−εKGPSt、εθDRt−εθGPSt、εYDRt−εYGPSt、εXDRt−εXGPStおよび上記雑音Vを入力として、上述の(3)〜(5)式および(1)式を実行することにより、信号生成過程にて定義された6つの誤差値εG,εA,εK,εθ,εY,εXからなる状態量Xが求められる。これらにより、車速センサ11の距離係数補正、ジャイロ12のオフセット補正,ゲイン補正、さらには、絶対位置補正、絶対方位補正が行われる。
【0025】
上述したように、現在位置検出部14は、マイクロコンピュータの処理として実現されるものである。以下、この現在位置検出部14が実行する推測航法処理を、図3〜図8に示すフローチャートに沿って説明する。なお、本処理は、一定周期TMで繰り返し実行される。
図3に示すように、まず、ステップA1では、現在位置検出部14は、移動距離演算部21および方位変化量演算部22により方位変化量・移動距離の演算処理を実行する。この演算処理の詳細を図4に沿って説明する。即ち、ステップB1では、ジャイロ12により検出されたジャイロ出力角速度にメインルーチンの起動周期TMを乗じることにより方位変化量を算出する。なお、ジャイロ出力角速度は、図14(a)のグラフから明らかなように、ジャイロ12の出力をサンプリングした値からオフセット値(この場合、2.5V)を減じたものに、換算ゲイン(グラフの傾きに相当)を乗じることにより算出されたものである。
次に、ステップB2では、後述するオフセット補正量にメインルーチンの起動周期TMを乗じたものを、ステップB1にて求めた方位変化量から減じることにより、方位変化量のオフセット補正を行う。即ち、図14(b)に示すように、角速度0[deg/sec]に対応するジャイロ12の出力電圧(ゼロ点)の変動に基づく誤差を補正する。
次に、ステップB3では、ステップB2にてオフセット補正された方位変化量に、後述するゲイン補正量を乗じることにより、方位変化量のゲイン補正を行う。即ち、図14(c)に示すように、グラフの傾き(換算ゲイン)の変動に基づく誤差を補正する。
次に、ステップB4では、本処理が前回起動されてから今回起動されるまでの間に検出された車速センサ11からの出力パルス数に、後述する距離係数を乗じることにより移動距離を算出する。以上により、方位変化量・移動距離の演算処理を終了する。
【0026】
方位変化量・移動距離の演算処理を終了すると、現在位置検出部14は、図3のステップA2に移行し、相対軌跡演算部23により相対軌跡の演算処理を実行する。
この演算処理の詳細を図5に沿って説明する。即ち、ステップC1では、先のステップB3にて算出された方位変化量を、それまでに求められている相対方位に加算することにより、相対方位を更新する。次に、ステップC2では、この更新された相対方位、および、先のステップB4にて算出された移動距離に基づき、相対位置座標の更新を行う。具体的には、南北方向をx座標軸とした相対座標rel.xを次に示す(16)式に従って更新し、東西方向をy座標軸とした相対座標rel.yを次に示す(17)式に従って更新する。但し、θはステップC1にて算出された相対方位である。
[式(16)]
rel.x←rel.x+移動距離×cosθ
[式(17)]
rel.y←rel.y+移動距離×sinθ
【0027】
即ち、この更新は、移動距離に対する相対方位のx,y成分を、それまでの相対位置座標に加算することにより行っている。この相対位置座標は相対軌跡を求めるために行うもので、その相対軌跡と道路形状との関係により、いわゆるマップマッチングが行われる。
次に、ステップC3では、ステップB4にて算出された移動距離を、メインルーチンの起動周期TMで除することにより車速を算出する。以上により、相対軌跡の演算処理を終了する。
【0028】
相対軌跡の演算処理を終了すると、現在位置検出部14は、図3のステップA3に移行し、絶対位置演算部24により絶対方位・絶対位置の演算処理を実行する。
この演算処理の詳細を図6に沿って説明する。即ち、ステップD1では、先のステップB3にて算出された方位変化量を、それまでに求められている絶対方位に加算することにより、絶対方位を更新する。次に、ステップD2では、この更新された絶対方位、および先のステップB4にて算出された移動距離に基づき、絶対位置座標の更新を行う。具体的には、南北方向をx座標軸とした絶対座標abs.xを次に示す(18)式に従って更新し、東西方向をy座標軸とした絶対座標abs.yを次に示す(19)式に従って更新する。但し、θはステップD1にて算出された絶対方位である。
[式(18)]
abs.x←abs.x+移動距離×cosθ
[式(19)]
abs.y←abs.y+移動距離×sinθ
【0029】
即ち、この更新は、移動距離に対する絶対方位のx,y成分を、それまでの絶対位置座標に加算することにより行っている。このようにして更新された絶対方位と絶対位置は後述するGPSとの複合化処理にて利用される。
【0030】
絶対方位・絶対位置の演算処理を終了すると、現在位置検出部14は、図3のステップA4に移行し、誤差推定部25および補正部26によりGPSとの複合化処理を実行する。この複合化処理の詳細を図7に沿って説明する。まず、ステップE1では、現在位置検出部14は、後述するGPS測位データに基づくカルマンフィルタの処理(ステップE3〜E12)または予測計算処理(ステップE13〜E17)が前回実行されてからT1秒経過したか否かを判定する。現在位置検出部14は、否定判定した場合(NO)にはステップE2に移行する。
ステップE2では、現在位置検出部14は、GPS受信機13が測位を行うことによりGPS受信機13からGPS測位データが入力されたか否かを判断する。現在位置検出部14は、肯定判定した場合(YES)には、ステップE3に移行して、誤差推定部25(カルマンフィルタ)による処理を開始する。一方、現在位置検出部14は、否定判定した場合(NO)には、そのまま本処理を終了する。
【0031】
ステップE3では、現在位置検出部14は、GPS受信機13からのGPS測位データ(速度,位置,方位)、および、先の推測航法処理により算出された推測航法データ(ステップC3により算出した車速,ステップD2により更新した絶対位置,ステップD1により更新した絶対方位)に基づいて観測値Y(εKDRt−εKGPSt、εθDRt−εθGPSt、εYDRt−εYGPSt、εXDRt−εXGPSt)の計算を行う。これと共に、観測過程で発生する雑音νをGPS受信機13のGPS測位データなどを基に計算する。
次に、現在位置検出部14は、ステップE4に移行し、プロセス行列φの計算を行う。このステップE4では、前回のプロセス行列の計算時点からの移動距離L、経過時間T(これらは図示しない計測処理により別途求められている)、および、ステップD1にて求めた絶対方位θにより、上記した(12)式に示すプロセス行列φを求める。
【0032】
このようにして計算した観測値Yおよびプロセス行列φに基づき、以下では、上記した(3)〜(5)式の計算を行って(1a)式に示す状態量Xを求める。まず、現在位置検出部14は、ステップE5に移行して、学習度の更新処理を実行する。この更新処理の詳細を図8に沿って説明する。即ち、ステップF1では、現在位置検出部14は、ジャイロ12によって検出される回転角速度が閾値W1以上であるか否かを判断する。現在位置検出部14は、肯定判断をした場合(YES)には、ステップF2に移行して、累積旋回回数を更新する。この累積旋回回数は、車両にジャイロ12が取り付けられた後(例えば、車両の出荷後)において当該車両が旋回した回数(ジャイロ12によって検出される回転角速度が閾値W1以上となった回数)の累積値を記憶したものである。そして、現在位置検出部14は、累積旋回回数を更新すると、ステップF3に移行する。なお、現在位置検出部14は、ステップF1において否定判断した場合(NO)には、累積旋回回数を更新することなくステップF3に移行する。
【0033】
ステップF3では、現在位置検出部14は、累積旋回回数が閾値N1以上であるか否かを判断する(誤差発生要因判定手段に相当)。現在位置検出部14は、否定判断をした場合(NO)には、ステップF4に移行して、システム雑音WをQs1に設定するとともに、誤差共分散Pの上限値PmaxをPs1に設定する。
一方、現在位置検出部14は、ステップF3において肯定判断した場合(YES)には、ステップF5に移行して、ナビゲーション装置10が起動してからT2時間経過したか否かを判断する(誤差発生要因判定手段)。現在位置検出部14は、否定判断した場合(NO)には、ステップF6に移行して、システム雑音WをQs2に設定するとともに、誤差共分散Pの上限値PmaxをPs2に設定する。
一方、現在位置検出部14は、ステップF5において肯定判断した場合(YES)には、ステップF7に移行して、システム雑音WをQs3に設定するとともに、誤差共分散Pの上限値PmaxをPs3に設定する。
【0034】
ここで、図9に示すように、上記のシステム雑音Wとして設定されるQs1,Qs2,Qs3は、Qs1>Qs2>Qs3の関係を満たすように設定される。また、上記の誤差共分散Pの上限値Pmaxとして設定されるPs1,Ps2,Ps3は、Ps1>Ps2>Ps3の関係を満たすように設定される。なお、システム雑音Wの値が大きいほど、誤差共分散Pの増加は急峻となる。
【0035】
車両にジャイロ12が取り付けられてから間もない場合、即ち、車両の累積旋回回数が少ない場合(ステップF3にてNO)には、換算ゲインの誤差の発生要因としては、ジャイロ12の取り付け角度の誤差(ジャイロ12の検出軸が傾いた状態で設置されることに基づく誤差)、或いは、ジャイロ12の製造ばらつきの誤差(ジャイロ12が製造される過程で各製品に固有に発生する誤差)が主な要因となる。このような要因により発生する誤差(オフセット性の誤差)は、変動するものではなく、補正をしなければ一定の誤差が発生し続けるが、補正をすれば除去することができ誤差が発生し続けることはない。そのため、このような誤差は早急に補正しておくことが望ましい。そこで、現在位置検出部14は、車両の累積旋回回数が少ない場合(ステップF3にてNO)には、システム雑音Wを大きく設定し(システム雑音W=Qs1)、また、誤差共分散Pの上限値Pmaxを大きく設定する(誤差共分散Pの上限値Pmax=Ps1)。これにより、換算ゲインの誤差の補正量が大きくなり、換算ゲインを迅速に補正することができる。
【0036】
一方、車両にジャイロ12が取り付けられてからある程度の時間が経過し、換算ゲインの補正もある程度繰り返された場合(ステップF3にてYES)には、換算ゲインの誤差の発生要因としては、温度変化に伴う誤差(ジャイロ12自体の温度変化に起因する誤差)が主な要因となる。このような要因により発生する誤差は、温度に応じて変動するものであり、補正をしたとしても、その後の温度変化により誤差が再び生じ得る。そのため、このような誤差は実際の状況(温度状況)に応じて随時補正することが望ましい。そこで、現在位置検出部14は、換算ゲインの補正がある程度繰り返された後においては、システム雑音Wを小さく設定し(システム雑音W=Qs2,Qs3)、また、誤差共分散Pの上限値Pmaxを小さく設定する(誤差共分散Pの上限値Pmax=Ps2,Ps3)。これにより、換算ゲインの誤差の補正量は小さくなるが、換算ゲインを実際の温度状況に応じてきめ細かく補正することができる。
【0037】
なお、ジャイロ12の温度は、ナビゲーション装置10が起動した後に徐々に上昇し始め、ある温度でほぼ一定に収束する傾向にある。そのため、起動からある程度の時間(この場合、T2時間)が経過していない場合(ステップF5にてNO)には、現在位置検出部14は、ジャイロ12の温度が上昇中(温度変化中)であると判断し、システム雑音WをQs3よりも大きめに設定し(システム雑音W=Qs2)、また、誤差共分散Pの上限値PmaxをPs3よりも大きめに設定する(誤差共分散Pの上限値Pmax=Ps2)。これにより、換算ゲインの誤差の補正量が比較的大きくなり、換算ゲインを温度変化に追従させながら補正することができる。
【0038】
一方、ナビゲーション装置10の起動からある程度の時間(T2時間)が経過した場合(ステップF5にてYES)には、現在位置検出部14は、ジャイロ12の温度がほぼ一定に収束したと判断し、システム雑音WをQs2よりも小さく設定し(システム雑音W=Qs3)、また、誤差共分散Pの上限値PmaxをPs2よりも小さく設定する(誤差共分散Pの上限値=Ps3)。これにより、換算ゲインの誤差の補正量が比較的小さくなり、収束した一定温度に応じて換算ゲインを精度良く補正することができる。また、ジャイロ12の温度がほぼ一定に収束し補正量を大きくする必要がない場合に、必要以上に補正量が大きくなってしまうことがない。
【0039】
以上のように換算ゲインの誤差の発生要因に基づいてシステム雑音Wおよび誤差共分散Pの上限値Pmaxの値を設定すると、現在位置検出部14は、学習度の更新処理を終了する。そして、図7のステップE6に移行して、(4)式により誤差共分散Pの予測計算を行う。そして、現在位置検出部14は、ステップE7に移行し、算出した誤差共分散Pの値が、上記のステップF4,F6,F7の何れかにて設定した誤差共分散Pの上限値Pmaxの値よりも大きいか否かを判断する。現在位置検出部14は、肯定判断した場合(YES)には、ステップE8に移行して、誤差共分散Pの値を上限値Pmaxに置き換える。そして、ステップE9に移行する。一方、現在位置検出部14は、ステップE7において否定判断した場合(NO)には、誤差共分差Pの値を上限値Pmaxに置き換えることなく、ステップE9に移行する。
【0040】
ステップE9では、現在位置検出部14は、(3)式によりカルマンゲインKの計算を行う。続くステップE10では、現在位置検出部14は、(5)式により誤差共分散Pの計算を行う。続くステップE11では、現在位置検出部14は、算出したカルマンゲインKおよび観測値Yに基づき、(1a)式により状態量Xを求める。この状態量Xは、(12)式の左辺に示すオフセット誤差(εG)、ゲイン誤差(εA),絶対方位誤差(εθ)、距離係数誤差(εK)、絶対位置北方向誤差(εY)、絶対位置東方向誤差(εX)を表している。
【0041】
そして、ステップE12では、状態量Xとして算出されたこれらの誤差値εG,εA,εK,εθ,εY,εXに基づき、推測航法誤差の補正(ジャイロ12のオフセット補正、同じくゲイン補正、車速センサ11の距離係数補正、絶対方位補正、絶対位置補正)を、次に示す(20)〜(25)式に従って行う。
[式(20)]
オフセット補正量=オフセット補正量−εG
[式(21)]
ゲイン補正量=ゲイン補正量×(1−εA)
[式(22)]
距離係数=距離係数×(1−εK)
[式(23)]
絶対方位=絶対方位−εθ
[式(24)]
abs.y(絶対位置)=abs.y−εY
[式(25)]
abs.x(絶対位置)=abs.x−εX
【0042】
即ち、ジャイロ12のオフセット補正およびゲイン補正により、ステップB2,B3にて用いられるオフセット補正量およびゲイン補正量が修正される。車速センサ11の距離係数補正により、ステップB4にて用いられる距離係数が修正される。絶対方位補正により、ステップD1にて用いられる絶対方位θが修正される。絶対位置補正により、ステップD2にて用いられる絶対位置が修正される。
そして、上記ステップE3〜E12の処理が、GPS受信機13からのGPS測位データが有るごとに繰り返されることにより、上記誤差が随時修正される。これにより、一層正確な推測航法データが得られることになる。
【0043】
なお、GPS受信機13からのGPS測位データが長時間(T1秒以上)に渡って得ることができず、先のステップE1にて肯定判定された場合(YES)には、現在位置検出部14は、プロセス行列φの計算(ステップE13)、学習度の更新処理(ステップE14)、誤差共分散Pの予測計算(ステップE15)を行い、算出した誤差共分散Pの値が設定した誤差共分散Pの上限値Pmaxの値よりも大きい場合には誤差共分散Pの値を上限値Pmaxに置き換える(ステップE16,E17)。なお、ステップE14における処理は、上述のステップE5における学習度の更新処理(図8参照)と同様の内容である。
GPS受信機13からGPS測位データが得られない場合、何も補正を行わないと誤差が大きくなってしまう。そのため、上記のステップE13〜E17の処理を実行することにより、誤差共分散Pの予測計算、即ち、誤差の見積もりと、システム雑音Wおよび誤差共分散Pの上限値Pmaxの設定については、定期的に行っておく。これにより、その後にGPS受信機13からのGPS測位データの入力が再開された時に行われるカルマンフィルタの処理を正確に行うことができる。
【0044】
以上に説明したように本実施形態によれば、誤差共分散Pに上限値Pmaxを設定し、算出された誤差共分散Pの値が設定した上限値Pmaxよりも大きい場合には、誤差共分差Pの値を上限値Pmaxに置き換えるように構成した。これにより、ジャイロ12の出力値を車両の回転角速度に換算する比率を示す換算ゲインが必要以上に補正されてしまうことがなくなり、当該換算ゲインの補正を精度良く行うことができる。
また、換算ゲインの誤差の発生要因に基づいて誤差共分散Pの上限値Pmax、換言すれば、換算ゲインの補正量の度合い(上限値)を誤差発生要因別に異なる値に設定するように構成した。これにより、換算ゲインの補正量を誤差の発生要因に応じた量とすることができ、換算ゲインの補正を一層精度良く行うことができる。
【0045】
なお、本発明は、上述した一実施形態にのみ限定されるものではなく、例えば次のように変形または拡張することができる。
システム雑音Wとして設定されるQs1,Qs2,Qs3の具体的な値、および、誤差共分散Pの上限値Pmaxとして設定されるPs1,Ps2,Ps3の具体的な値は、例えばナビゲーション装置10やジャイロ12の性能などに応じて適宜変更して設定することができる。また、推測航法処理における時間T1,T2、閾値W1,N1などの値は、適宜変更して設定することができる。
例えばジャイロ12を取り付け直した場合、つまり、ジャイロ12の取り付け角度が変化してしまうような場合には、記憶している累積旋回回数をリセットすることで、図8に示すステップF3,F4の処理、即ち、オフセット性の誤差を補正する処理を再び実行するようにするとよい。
【符号の説明】
【0046】
図面中、10はナビゲーション装置(車両用現在位置検出装置)、11は車速センサ(速度センサ)、12はジャイロスコープ(角速度センサ)、13はGPS受信機、14は現在位置検出部(現在位置算出手段、誤差発生要因判定手段)、21は移動距離演算部(移動距離算出手段)、22は方位変化量演算部(方位変化量算出手段)、25は誤差推定部(誤差推定手段)、26は補正部(補正手段)を示す。
【特許請求の範囲】
【請求項1】
車両の回転角速度に応じた信号を出力する角速度センサと、
車両の走行速度に応じた信号を出力する速度センサと、
前記角速度センサの出力値を前記回転角速度に換算する比率を示す換算ゲインを算出パラメータとして用い、前記角速度センサの出力値に基づいて車両の方位変化量を算出する方位変化量算出手段と、
前記速度センサの出力値に基づいて車両の移動距離を算出する移動距離算出手段と、
前記方位変化量算出手段によって算出される方位変化量および前記移動距離算出手段によって算出される移動距離に基づいて車両の現在位置や進行方向を算出する現在位置算出手段と、
GPS衛星からの電波を受信し、車両の現在位置および進行方向を出力するGPS受信機と、
前記GPS受信機からの出力値と前記現在位置算出手段での算出値との差を観測値として算出し、その観測値に基づいて前記換算ゲインの誤差を状態量として推定する誤差推定手段と、
前記誤差推定手段によって推定される前記状態量に基づいて前記換算ゲインを補正する補正手段と、
を備え、
前記換算ゲインの誤差共分散値が所定値よりも大きい場合には、当該換算ゲインの誤差共分散値を前記所定値に置き換えることを特徴とする車両用現在位置検出装置。
【請求項2】
前記換算ゲインの誤差の発生要因を判定する誤差発生要因判定手段を備え、
前記誤差発生要因判定手段によって判定された前記発生要因に基づいて前記所定値を設定することを特徴とする請求項1記載の車両用現在位置検出装置。
【請求項1】
車両の回転角速度に応じた信号を出力する角速度センサと、
車両の走行速度に応じた信号を出力する速度センサと、
前記角速度センサの出力値を前記回転角速度に換算する比率を示す換算ゲインを算出パラメータとして用い、前記角速度センサの出力値に基づいて車両の方位変化量を算出する方位変化量算出手段と、
前記速度センサの出力値に基づいて車両の移動距離を算出する移動距離算出手段と、
前記方位変化量算出手段によって算出される方位変化量および前記移動距離算出手段によって算出される移動距離に基づいて車両の現在位置や進行方向を算出する現在位置算出手段と、
GPS衛星からの電波を受信し、車両の現在位置および進行方向を出力するGPS受信機と、
前記GPS受信機からの出力値と前記現在位置算出手段での算出値との差を観測値として算出し、その観測値に基づいて前記換算ゲインの誤差を状態量として推定する誤差推定手段と、
前記誤差推定手段によって推定される前記状態量に基づいて前記換算ゲインを補正する補正手段と、
を備え、
前記換算ゲインの誤差共分散値が所定値よりも大きい場合には、当該換算ゲインの誤差共分散値を前記所定値に置き換えることを特徴とする車両用現在位置検出装置。
【請求項2】
前記換算ゲインの誤差の発生要因を判定する誤差発生要因判定手段を備え、
前記誤差発生要因判定手段によって判定された前記発生要因に基づいて前記所定値を設定することを特徴とする請求項1記載の車両用現在位置検出装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2012−58087(P2012−58087A)
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願番号】特願2010−201941(P2010−201941)
【出願日】平成22年9月9日(2010.9.9)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成24年3月22日(2012.3.22)
【国際特許分類】
【出願日】平成22年9月9日(2010.9.9)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]