
車両用現在位置決定装置
【課題】車両の方位と移動距離とから車両現在位置を逐次決定する車両用現在位置決定装置において、車速センサからの車速パルス信号が得られないような低車速時であっても車両の移動距離を算出することができるようにする。
【解決手段】 車両に設けられたカメラによって連続的に撮像される車両周辺の画像の変化に基づいて車速を決定する車速決定手段(S114、S116、S117)と、その車速決定手段によって決定された車速を用いて移動距離を算出する移動距離算出手段(S118)とを設け、車速パルス信号が得られているときはその車速パルス信号から移動距離を算出するが、車両が走行中であるにも拘らず、車速パルス信号が得られないときには、車速決定手段および移動距離算出手段を実行して移動距離を算出する。
【解決手段】 車両に設けられたカメラによって連続的に撮像される車両周辺の画像の変化に基づいて車速を決定する車速決定手段(S114、S116、S117)と、その車速決定手段によって決定された車速を用いて移動距離を算出する移動距離算出手段(S118)とを設け、車速パルス信号が得られているときはその車速パルス信号から移動距離を算出するが、車両が走行中であるにも拘らず、車速パルス信号が得られないときには、車速決定手段および移動距離算出手段を実行して移動距離を算出する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の方位および移動距離から、車両の現在位置を逐次決定する現在位置決定装置に関する。
【背景技術】
【0002】
車両の現在位置をディスプレイ上に道路地図とともに表示したり、現在地から目的地までの適切な経路を設定し、経路案内を行ったりするナビゲーション装置が知られている。
【0003】
ナビゲーション装置において車両の現在位置を表示したり、現在地から目的地までの経路案内を実行したりするためには、車両の現在位置を決定する必要がある。そのため、例えば、地磁気センサなどの方位センサからの出力値に基づいて決定される方位、および車速センサからの車速パルス信号に基づいて算出される移動距離を用いて推測航法演算を行うものが基本技術として知られている(たとえば、特許文献1)。
【0004】
しかし、この手法は車両自身で自車位置を決定する「自立航法」であるため、絶対位置が検出できない。そのため、例えばGPS衛星や路側ビーコンなどから発信される電波航法用の電波を利用して絶対位置や絶対方位などを得て、より適正な現在位置を決定することができるようにした技術も知られている。
【0005】
ただし、GPS衛星からの情報の場合、100m程度の誤差の発生を想定しておく必要があるため、位置決定の精度向上のために、いわゆるマップマッチングによる補正を行う技術がある。これは、上述した推測航法(自立航法のみ、あるいは、自立航法に電波航法を併用したもの)に基づいて算出した車両の現在位置に至る走行軌跡を、地図データに基づく道路情報と比較して位置補正を行うものである。
【0006】
しかし、マップマッチングには、推測航法演算に用いる移動距離の誤差が大きくなると、間違った道路にマッチングさせてしまう状況が生じる。そして、移動距離の誤差の原因として、車速センサからの車速パルス信号の精度に起因するものが知られている(たとえば、特許文献2)。
【0007】
車速センサは走行速度に応じた間隔で車速パルス信号を出力するが、数km/h(たとえば3.2km/h)未満の低車速では車速パルス信号を出力しない構成となっている場合が多い。また、車速センサ自体は3.2km/hのような低車速時にも車速パルス信号を出力する構成となっているが、その車速パルス信号を用いる際に信号精度を落とすこともある。たとえば、車速パルス信号をABSの制御にも用いる場合などであり、ABSの制御においては、3.2km/h未満の低車速時に制御をする必要がないことに加え、車速パルス信号の精度を高くしてしまうと処理負荷が大きくなってしまうので、車速パルス信号の精度を落とすのである。
【0008】
しかし、車速パルス信号の精度が低い場合、現在位置検出のための移動距離を算出する際の誤差が大きくなってしまう。たとえば、走行状態から停止状態となるとき、および、停止状態から再発進する時には、車速センサから車速パルス信号が出力されないにもかかわらず車両が走行している状態があるため、算出される移動距離にも誤差が生じる。また、その誤差は車速パルス信号の精度が低いほど大きくなる。そして、停止・再発進を繰り返すことにより、誤差は累積されることになる。
【0009】
その結果、例えば、碁盤の目のように複数の道路がある程度短い間隔で交差している状況では、ある交差点を曲がった場合に、マップマッチングにおいて一つ手前の交差点を曲がったと判断してしまう可能性がある。
【0010】
そこで、特許文献2では、車両の停止・再発進に伴う移動距離の算出誤差を少なくするため、車両の停止直前および再発進直後の車速パルス信号が得られない期間の移動距離を、その期間の前後の車両の加速度に基づいて推定している。
【0011】
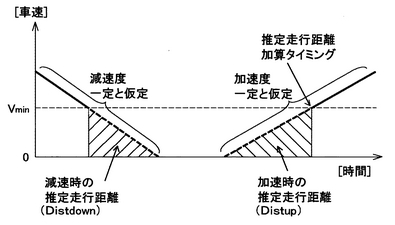
図1は、特許文献2の図3と同じ図であり、特許文献2における移動距離の推定手法を概念的に示す図である。この図1に示す手法は、車両が減速していって車速パルス信号が出力されなくなる場合には、車速パルス信号が出力されない車速Vmin未満の低速走行状態における加速度(つまり減速度)を車速Vmin未満になる直前の加速度に等しいと仮定して、斜線で示す領域の面積を「減速時の推定走行距離Distdown」としている。同様に、加速時も、車速パルス信号が出力されない車速Vmin未満の低速走行状態における加速度を、車速Vmin以上になった直後の加速度に等しいと仮定して、斜線で示す領域の面積を「加速時の推定走行距離Distup」としている。
【特許文献1】特開平8−54248号公報
【特許文献2】特開2000−97713号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
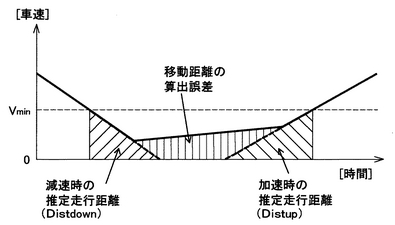
特許文献2の技術は、車速がVminよりも低く、車速センサから車速パルス信号が出力されない状態となった場合には、車両は一旦停止し、次いで再発進すると仮定して、車速パルス信号が出力されない期間の移動距離を推定している。しかし、実際には、車速がVminよりも低くなったときに、車両は、必ず停止し、次いで再発進する訳ではない。たとえば、渋滞中には、車速Vminよりも低い低車速での走行を継続することがある。この場合には、特許文献2の技術を用いたとしても、なお、移動距離に誤差が生じる。図2は、このことを概念的に説明する図である。図2は、車両が減速していったが停止はせず、車速Vmin未満での走行を継続し、次いで再加速した状態を示している。図2のような車速変化に対して特許文献2の技術を用いたとしても、図に示す面積分の算出誤差が生じてしまう。なお、図2のような車速変化の場合、車速Vminでの走行距離がある程度長い場合には、車速センサから車速パルス信号が全く出力されない訳ではなく、ある程度の数のパルスが出力されることがある。しかし、その場合の車速パルス信号はパルス間隔が長く、正確な演算処理が行えないため、その車速パルス信号に基づいた演算処理は実行されないようになっている。すなわち、演算処理装置を実行する処理装置にとっては、車速パルス信号が得られない状態が継続することになる。
【0013】
また、車両後進時にも、車速Vminよりも低い低車速で走行を継続することがある。この場合にも、特許文献2の技術では移動距離の算出精度が不十分となる。そして、移動距離の算出精度が不十分であると、現在位置の決定精度が不十分となってしまう。
【0014】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、車両の方位と移動距離とから車両現在位置を逐次決定する車両用現在位置決定装置において、車速センサからの車速パルス信号が得られないような低車速時であっても車両の移動距離を算出することができるようにすることにある。
【課題を解決するための手段】
【0015】
その目的を達成するための請求項1記載の発明は、車両の方位と移動距離とから、その車両の現在位置を逐次決定する車両用現在位置決定装置であって、前記車両に設けられたカメラによって連続的に撮像される車両周辺の画像の変化に基づいて車速を決定する車速決定手段と、その車速決定手段によって決定された車速を用いて前記移動距離を算出する移動距離算出手段とを含むことを特徴とする。
【0016】
この請求項1記載の発明のように、車速決定手段により、カメラによって撮像される画像の変化に基づいて車速を決定するようにすれば、画像は車速パルス信号が得られない低速走行時にも変化するので、車速パルス信号が得られないような低速走行時にも、車速決定手段によって算出された車速を用いて移動距離を算出することができる。
【0017】
ここで、移動距離算出手段において、車速決定手段による車速を用いた移動距離の算出は、車速センサから車速パルス信号が得られるときにも行ってもよいが、好ましくは、請求項2記載のように、車速センサから車速パルス信号が得られる場合にはその車速パルス信号に基づいて移動距離を算出し、車速パルス信号が得られない場合に前記車速決定手段によって決定される車速を用いて移動距離を算出するようにする。
【0018】
このように、車速センサから車速パルス信号が得られる場合には、従来と同様にその車速パルス信号に基づいて移動距離を算出し、さらに、車速パルス信号が得られないときに画像の変化に基づいて算出される車速を用いて移動距離を算出するようにすれば、確実に従来よりも車両の現在位置決定の精度が向上する。
【0019】
また、好ましくは、請求項3記載のように、前記カメラによって撮像される画像の変化に基づいて前記車両が走行中であるか否かを判定する走行判定手段をさらに備え、前記移動距離算出手段は、その走行判定手段によって走行中であると判定されたにも拘らず、車速センサから車速パルス信号が得られず、且つ、前記車速決定手段による車速決定ができない場合には、車速として、前記車速パルス信号が得られる車速の下限値よりも低く且つゼロよりも大きい一定車速を用いて前記移動距離を算出するようにする。
【0020】
このようにすれば、車速パルス信号が得られず、また、画像の変化に基づいて車速が決定できない場合であっても移動距離が算出されるので、さらに車両の現在位置決定の精度が向上する。
【0021】
また、請求項4記載のように、カメラによって撮像された画像からは、車両が走行中であるかのみを判断し、車両が走行中であるのに車速センサからの車速パルス信号が得られないときは、常に一定の車速であると仮定してもよい。すなわち、請求項4記載の発明は、車両の方位と移動距離とから、その車両の現在位置を逐次決定する車両用現在位置決定装置であって、車速センサからの車速パルス信号が得られない場合に、前記車両に設けられたカメラによって連続的に撮像される車両周辺の画像の変化に基づいて、車両が走行中であるか否かを判定する走行判定手段と、その走行判定手段によって走行中であると判定された場合には、車速として、前記車速パルス信号が得られる車速の下限値よりも低く且つゼロよりも大きい所定の一定値を用いて前記移動距離を算出する移動距離算出手段とを含むことを特徴とする。
【0022】
このようにしても、車速センサからの車速パルス信号が得られない低車速時であっても車両の移動距離が算出されることになって、前述の目的が達成される。
【0023】
また、請求項1乃至4記載の車両用現在位置決定装置は、請求項5のように、前記車両の現在位置に至るまでの走行軌跡と、予め記憶された地図データに基づく道路の形状とを比較するマップマッチング処理を行って、前記車両の現在位置を補正する補正手段をさらに備えている場合に特に有効である。車速パルス信号が得られないような低車速時にも移動距離が算出できるようになると、マップマッチング処理において誤ったマッチングを行ってしまうことが少なくなるからである。
【発明を実施するための最良の形態】
【0024】
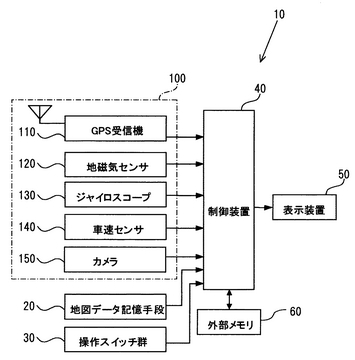
以下、本発明の実施の形態を図面に基づいて説明する。図3は、本発明の車両用現在位置決定装置としての機能を備えたナビゲーション装置10の全体構成を示すブロック図である。ナビゲーション装置10は、地図データ記憶手段20、操作スイッチ群30、制御装置40、表示装置50、外部メモリ60、および位置検出装置100を備えている。
【0025】
制御装置40は、通常のコンピュータであり、内部には周知のCPU、ROM、RAM、I/Oおよびこれらの構成を接続するためのバスラインを備えている。ROMには、制御装置40が実行するためのプログラムが書き込まれており、このプログラムに従ってCPU等が所定の演算処理を実行する。
【0026】
位置検出装置100は、衛星からの電波に基づいて車両の位置を測定するグローバルポジショニングシステム(GPS)のためのGPS受信機110、車両の絶対方位を検出するための地磁気センサ120、車両の相対方位を検出するためのジャイロスコープ130、および車速センサ140を有している。車速センサ140は、車両に通常備えられる一般的な構造であり、車速Vに応じた車速パルス信号を出力するが、たとえば数km/h程度である出力下限車速Vminよりも車速Vが低い場合には、車速パルス信号が出力されない構成となっている。また、位置検出装置100は、さらに、カメラ150を有している。このカメラ150は、本実施例ではCCDカメラを用いている。カメラ150は、車速Vを決定するための画像を連続的に取得する画像取得手段として用いられる。カメラ150の取り付け位置は、車両内部の、たとえば運転席近傍の天井等とされており、車両前方の所定範囲の道路状況を撮像する。
【0027】
GPS受信機110は電波航法による車両位置測定のためのものであり、地磁気センサ120、ジャイロスコープ130、車速センサ140およびカメラ150は自立航法による車両位置推定のためのものである。なお、電波航法には、GPSに代えて、道路交通情報通信システム(VICS)の光ビーコンを利用しても良いし、GPSとVICSを併用しても良い。また、自立航法における車両の方位を検出するために、地磁気センサ120およびジャイロスコープ130のいずれか一方のみを用いても良いし、それらに代えて、ステアリングセンサや車両の左右輪に設けられた車輪速センサを用いても良い。また、自立航法のみによって精度が満足される場合には、電波航法のためのGPS受信機110が設けられていなくても良い。
【0028】
地図データ記憶手段20は、たとえばDVD−ROM、CD−ROMなどの図示しない記憶媒体を備え、その記憶媒体には、道路データ、背景データ、文字データ、施設データ、およびマップマッチング用データなどが格納されており、それらのデータを制御装置40に入力する。
【0029】
操作スイッチ群30は、たとえば表示装置50と一体になったタッチスイッチもしくは表示装置50の周辺に設けられるメカニカルなスイッチ等からなり、表示装置50に表示された地図の縮尺変更、メニュー表示選択、目的地設定、自宅位置設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等の各種入力に使用される。
【0030】
表示装置50は、たとえば液晶ディスプレイ、有機ELディスプレイによって構成され、車両の現在位置に対応する自車位置マーク、地図データによって生成された車両周辺の道路地図などが表示され、また、状況に応じて目的地選択画面等も表示される。
【0031】
外部メモリ60は、たとえば、メモリカードやハードディスク等の書き込み可能な記憶媒体からなる。この外部メモリ60には、ユーザによって設定された自宅位置や、テキストデータ、画像データ、音声データ等の各種データが記憶される。なお、上記画像データには、たとえば、道路標識、信号機、電柱など、道路上またはその周辺に固定されている固定物の画像データが多数含まれている。また、外部メモリ60には、上記画像データが記憶されている固定物について、その種類毎に、カメラ150によって撮像された画像内におけるその固定物の大きさと、車両からの実際の距離との関係も記憶されている。
【0032】
前述の制御装置40は、位置検出装置100からの信号に基づいて推測航法演算を実行して車両の現在位置を逐次決定する。また、推測航法演算によって決定した車両の現在位置を地図データ記憶手段20に格納されたマップマッチングデータと比較することによって車両の現在位置を補正(確定)する。
【0033】
図4は、上述した制御装置40における車両の現在位置決定機能の要部を示すフローチャートである。この図4に示すフローチャートは、比較的短い所定の起動周期Tで繰り返し実行するようになっている。
【0034】
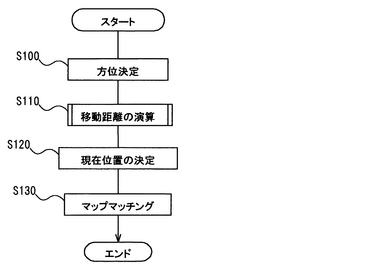
図4において、まず、ステップS100では、方位センサである地磁気センサ120およびジャイロスコープ130からの信号に基づいて車両の方位を決定する。
【0035】
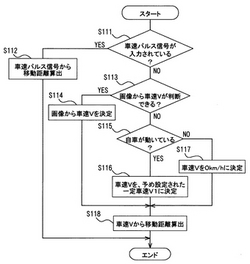
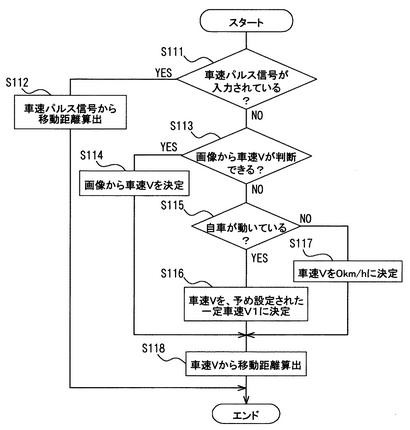
そして、続くステップS110では、図5に詳しく示す処理を実行することにより、図4のルーチンの起動周期Tの間に車両が移動した距離を演算する。
【0036】
図5において、まず、ステップS111では、車速センサ140から車速パルス信号が入力されているか否かを判断する。車速パルス信号が入力されており、ステップS111の判断が肯定された場合には、ステップS112において、前回移動距離を算出してからの車速パルス信号の入力数である車速パルス数に所定の距離係数を乗じることにより移動距離を算出する。この距離係数は、車速センサ140が出力する車速パルス信号の間隔に対応する車両走行距離であり、たとえば0.4mである。
【0037】
一方、車速パルス信号が入力されておらず、ステップS111の判断が否定された場合(すなわち、車速Vが出力下限車速Vminよりも低い場合)には、ステップS113において、カメラ150によって連続的に撮像されている画像から車速Vが判断できるか否かをさらに判断する。この判断は、具体的には、外部メモリ60に画像データが記憶されている固定物が、カメラ150によって撮像された画像内にあるか否かを検索することにより行う。
【0038】
このステップS113の判断が肯定された場合には、ステップS114においてカメラ150によって連続的に撮像されている画像の時間経過に伴う変化から車速Vを決定する。すなわち、まず、少なくとも2つの観測時点において、カメラ150によって撮像された画像内の固定物の大きさを決定する。次いで、その決定した大きさから、外部メモリ60に記憶されているその固定物の大きさと車両からの実際の距離との関係を用いて、各観測時点におけるその固定物と車両との間の相対距離を決定する。そして、決定した相対距離の変化と観測時点間の時間差から車速Vを算出する。
【0039】
一方、ステップS113の判断が否定された場合には、さらに、走行判定手段に相当するステップS115の判断を実行する。このステップS115では、自車が動いているか否かを判断する。この判断は、カメラ150によって連続的に撮像されている画像全体を用いて行い、画像全体が時間の経過に伴って変化しているか否かを判断することにより行う。画像全体を対象としてそれが変化しているか否かを判断するのみであるので、ステップS113において画像データが記憶されている固定物が画像内に検出できない場合でも、このステップS115の判断は可能なのである。
【0040】
そして、自車が動いていると判断した場合には、ステップS116において、車速Vを、0km/hよりも大きく、前述の出力下限車速Vminよりも低い速度に予め設定された一定車速V1(たとえば、V1=Vmin/2)に決定する。また、ステップS115の判断が否定された場合には、ステップS117において車速Vを0km/hに決定する。
【0041】
上記ステップS114、S116、およびS117が車速決定手段に相当し、ステップS114、S116、またはS117を実行したら、移動距離算出手段に相当するステップS118において、そのステップS114、S116、またはS117で決定した車速Vに図4のルーチンの起動周期Tを乗じることにより、移動距離を算出する。
【0042】
図4に戻って、ステップS110の実行後は、ステップS120において現在位置を決定する。すなわち、前回の図4の実行において確定した車両の位置を基準として、ステップS100で決定した方位へ、ステップS110で算出した移動距離だけ移動した位置を現在位置として決定する。なお、このようにして決定する現在位置は自立航法によるものであり、自立航法によって決定した現在位置と、GPS受信機110による現在位置とを比較して、その差が所定距離以上である場合には、GPS受信機110による現在位置を採用するようにしてもよい。
【0043】
続くステップS130は補正手段に相当する。このステップS130では、まず、上記ステップS120で決定した現在位置に基づいて、地図データ記憶手段20から自車両周辺の地図データを読み込み、さらに、その読み込んだ地図データ上においてステップS120で決定した現在位置と所定距離以内の道路、もしくはすでに道路上にその現在位置が位置している場合にはその道路を車両が走行する可能性がある道路として特定する。そして、今回のステップS120の実行によって決定した現在位置、および過去にこの図4を実行することにより決定した複数の現在位置を連結することにより走行軌跡を決定する。その走行軌跡の形状と、車両が走行する可能性のある道路の形状とを比較して、最も相関の高い道路を車両が現在走行している道路として決定するとともに、ステップS120で決定した現在位置がその道路上にない場合には、現在位置をその道路上となるように補正する。
【0044】
以上、説明した本実施形態によれば、車速パルス信号が得られないときであっても、カメラ150によって撮像される画像の変化に基づいて車速Vを決定するので(S114、S116、S117)、車速パルス信号が得られないような低速走行時にも、その車速Vを用いて移動距離を算出することができる。
【0045】
また、本実施形態によれば、車速パルス信号が得られるときには、従来と同様に、その車速パルス信号に基づいて移動距離を算出し、車速パルス信号が得られないときに、画像の変化に基づいて車速Vを決定して、その車速Vを用いて移動距離を算出するようになっているので、確実に従来よりも車両の現在位置決定の精度が向上する。
【0046】
さらに、本実施形態によれば、車両が走行中であるか否かを判断しており(S115)、車両が走行中であるにも拘らず、車速パルス信号が得られず、且つ、画像からも車速Vが決定できない場合にも、車速Vを一定車速V1として移動距離を算出しているので、車両の現在位置決定の精度がさらに向上する。
【0047】
そして、車両の現在位置決定の精度が向上しているので、マップマッチング処理(S130)において誤ったマッチングを行ってしまうことが少なくなる。
【0048】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、次の実施形態も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
【0049】
たとえば、前述の実施形態では、車速パルス信号が得られるときは、その車速パルス信号に基づいて移動距離を算出していたが、車速パルス信号が得られるときにも画像から車速Vを算出して、その車速Vから移動距離を算出するようにしてもよい。すなわち、図5において、ステップS111およびS112を省略してもよい。
【0050】
また、前述の実施形態では、画像から車速Vが判断できるか否かを判断しており、画像から車速Vが判断できないときであって、走行中であるときにのみ、車速Vを一定車速V1としていたが、車速パルス信号が入力されていないが、走行中であると判断したときには、常に車速Vを一定車速V1としてもよい。すなわち、図5において、ステップS113およびS114を省略してもよい。このようにしても、車速パルス信号が得られないが車両が走行中である状態の移動距離が算出されるので、車速パルス信号が得られないときの移動距離が全く算出されない態様に比較して現在位置の決定精度が向上する。
【0051】
また、図5において、ステップS115およびS116を省略し、ステップS113の判断が否定された場合には常にステップS117を実行するようにしてもよい。このようにしても、画像から車速Vが判断できる状態であれば車速Vが算出されるので(ステップS114)、車速パルス信号が得られないときの移動距離が全く算出されない態様に比較して現在位置の決定精度が向上する。
【0052】
また、前述の実施形態では、車両が単に走行中であるか否かを判断しているのみであり(S115)、その走行が前進走行であるか後進走行であるかを識別していなかったが、車速Vの決定(S114、S116)において、前進と後進とを区別するようにしてもよい(すなわち、後進走行であるときはマイナスの車速Vとする)。前進と後進との区別は、たとえば、シフトポジションセンサからの信号に基づいてシフトレバーの位置を判断することによって行う。あるいは、画像から車速Vを決定することができる場合には(S114)、時間経過に伴う固定物との間の相対距離の変化から前進か後進かを判断してもよい。たとえば、前述の実施形態のようにカメラ150が車両の前方を撮像するように設置されている場合には、時間経過に伴って固定物と車両との相対距離が大きくなっていれば、車両が後進していると判断することができる。
【0053】
また、前述の実施形態では、カメラ150によって撮像された画像に基づく車速Vの決定は、推測航法演算等も行う制御装置40において行っていたが、制御装置40とは別に画像に基づく車速Vの決定のための処理装置を設けることにより、制御装置40の処理負荷を軽減させるようにしてもよい。
【図面の簡単な説明】
【0054】
【図1】特許文献2における移動距離の推定手法を概念的に示す図である。
【図2】車両が車速Vmin未満での走行を継続した場合に、特許文献2の技術を適用したときの算出誤差を示す図である。
【図3】本発明の車両用現在位置決定装置としての機能を備えたナビゲーション装置10の全体構成を示すブロック図である。
【図4】制御装置40における車両の現在位置決定機能の要部を示すフローチャートである。
【図5】図4のステップS110(移動距離の演算)の処理を詳しく示すフローチャートである。
【符号の説明】
【0055】
10:ナビゲーション装置(車両用現在位置決定装置)
40:制御装置
140:車速センサ
150:カメラ
S114、S116、S117:車速決定手段
S115:走行判定手段
S118:移動距離算出手段
S130:補正手段
【技術分野】
【0001】
本発明は、車両の方位および移動距離から、車両の現在位置を逐次決定する現在位置決定装置に関する。
【背景技術】
【0002】
車両の現在位置をディスプレイ上に道路地図とともに表示したり、現在地から目的地までの適切な経路を設定し、経路案内を行ったりするナビゲーション装置が知られている。
【0003】
ナビゲーション装置において車両の現在位置を表示したり、現在地から目的地までの経路案内を実行したりするためには、車両の現在位置を決定する必要がある。そのため、例えば、地磁気センサなどの方位センサからの出力値に基づいて決定される方位、および車速センサからの車速パルス信号に基づいて算出される移動距離を用いて推測航法演算を行うものが基本技術として知られている(たとえば、特許文献1)。
【0004】
しかし、この手法は車両自身で自車位置を決定する「自立航法」であるため、絶対位置が検出できない。そのため、例えばGPS衛星や路側ビーコンなどから発信される電波航法用の電波を利用して絶対位置や絶対方位などを得て、より適正な現在位置を決定することができるようにした技術も知られている。
【0005】
ただし、GPS衛星からの情報の場合、100m程度の誤差の発生を想定しておく必要があるため、位置決定の精度向上のために、いわゆるマップマッチングによる補正を行う技術がある。これは、上述した推測航法(自立航法のみ、あるいは、自立航法に電波航法を併用したもの)に基づいて算出した車両の現在位置に至る走行軌跡を、地図データに基づく道路情報と比較して位置補正を行うものである。
【0006】
しかし、マップマッチングには、推測航法演算に用いる移動距離の誤差が大きくなると、間違った道路にマッチングさせてしまう状況が生じる。そして、移動距離の誤差の原因として、車速センサからの車速パルス信号の精度に起因するものが知られている(たとえば、特許文献2)。
【0007】
車速センサは走行速度に応じた間隔で車速パルス信号を出力するが、数km/h(たとえば3.2km/h)未満の低車速では車速パルス信号を出力しない構成となっている場合が多い。また、車速センサ自体は3.2km/hのような低車速時にも車速パルス信号を出力する構成となっているが、その車速パルス信号を用いる際に信号精度を落とすこともある。たとえば、車速パルス信号をABSの制御にも用いる場合などであり、ABSの制御においては、3.2km/h未満の低車速時に制御をする必要がないことに加え、車速パルス信号の精度を高くしてしまうと処理負荷が大きくなってしまうので、車速パルス信号の精度を落とすのである。
【0008】
しかし、車速パルス信号の精度が低い場合、現在位置検出のための移動距離を算出する際の誤差が大きくなってしまう。たとえば、走行状態から停止状態となるとき、および、停止状態から再発進する時には、車速センサから車速パルス信号が出力されないにもかかわらず車両が走行している状態があるため、算出される移動距離にも誤差が生じる。また、その誤差は車速パルス信号の精度が低いほど大きくなる。そして、停止・再発進を繰り返すことにより、誤差は累積されることになる。
【0009】
その結果、例えば、碁盤の目のように複数の道路がある程度短い間隔で交差している状況では、ある交差点を曲がった場合に、マップマッチングにおいて一つ手前の交差点を曲がったと判断してしまう可能性がある。
【0010】
そこで、特許文献2では、車両の停止・再発進に伴う移動距離の算出誤差を少なくするため、車両の停止直前および再発進直後の車速パルス信号が得られない期間の移動距離を、その期間の前後の車両の加速度に基づいて推定している。
【0011】
図1は、特許文献2の図3と同じ図であり、特許文献2における移動距離の推定手法を概念的に示す図である。この図1に示す手法は、車両が減速していって車速パルス信号が出力されなくなる場合には、車速パルス信号が出力されない車速Vmin未満の低速走行状態における加速度(つまり減速度)を車速Vmin未満になる直前の加速度に等しいと仮定して、斜線で示す領域の面積を「減速時の推定走行距離Distdown」としている。同様に、加速時も、車速パルス信号が出力されない車速Vmin未満の低速走行状態における加速度を、車速Vmin以上になった直後の加速度に等しいと仮定して、斜線で示す領域の面積を「加速時の推定走行距離Distup」としている。
【特許文献1】特開平8−54248号公報
【特許文献2】特開2000−97713号公報
【発明の開示】
【発明が解決しようとする課題】
【0012】
特許文献2の技術は、車速がVminよりも低く、車速センサから車速パルス信号が出力されない状態となった場合には、車両は一旦停止し、次いで再発進すると仮定して、車速パルス信号が出力されない期間の移動距離を推定している。しかし、実際には、車速がVminよりも低くなったときに、車両は、必ず停止し、次いで再発進する訳ではない。たとえば、渋滞中には、車速Vminよりも低い低車速での走行を継続することがある。この場合には、特許文献2の技術を用いたとしても、なお、移動距離に誤差が生じる。図2は、このことを概念的に説明する図である。図2は、車両が減速していったが停止はせず、車速Vmin未満での走行を継続し、次いで再加速した状態を示している。図2のような車速変化に対して特許文献2の技術を用いたとしても、図に示す面積分の算出誤差が生じてしまう。なお、図2のような車速変化の場合、車速Vminでの走行距離がある程度長い場合には、車速センサから車速パルス信号が全く出力されない訳ではなく、ある程度の数のパルスが出力されることがある。しかし、その場合の車速パルス信号はパルス間隔が長く、正確な演算処理が行えないため、その車速パルス信号に基づいた演算処理は実行されないようになっている。すなわち、演算処理装置を実行する処理装置にとっては、車速パルス信号が得られない状態が継続することになる。
【0013】
また、車両後進時にも、車速Vminよりも低い低車速で走行を継続することがある。この場合にも、特許文献2の技術では移動距離の算出精度が不十分となる。そして、移動距離の算出精度が不十分であると、現在位置の決定精度が不十分となってしまう。
【0014】
本発明は、この事情に基づいて成されたものであり、その目的とするところは、車両の方位と移動距離とから車両現在位置を逐次決定する車両用現在位置決定装置において、車速センサからの車速パルス信号が得られないような低車速時であっても車両の移動距離を算出することができるようにすることにある。
【課題を解決するための手段】
【0015】
その目的を達成するための請求項1記載の発明は、車両の方位と移動距離とから、その車両の現在位置を逐次決定する車両用現在位置決定装置であって、前記車両に設けられたカメラによって連続的に撮像される車両周辺の画像の変化に基づいて車速を決定する車速決定手段と、その車速決定手段によって決定された車速を用いて前記移動距離を算出する移動距離算出手段とを含むことを特徴とする。
【0016】
この請求項1記載の発明のように、車速決定手段により、カメラによって撮像される画像の変化に基づいて車速を決定するようにすれば、画像は車速パルス信号が得られない低速走行時にも変化するので、車速パルス信号が得られないような低速走行時にも、車速決定手段によって算出された車速を用いて移動距離を算出することができる。
【0017】
ここで、移動距離算出手段において、車速決定手段による車速を用いた移動距離の算出は、車速センサから車速パルス信号が得られるときにも行ってもよいが、好ましくは、請求項2記載のように、車速センサから車速パルス信号が得られる場合にはその車速パルス信号に基づいて移動距離を算出し、車速パルス信号が得られない場合に前記車速決定手段によって決定される車速を用いて移動距離を算出するようにする。
【0018】
このように、車速センサから車速パルス信号が得られる場合には、従来と同様にその車速パルス信号に基づいて移動距離を算出し、さらに、車速パルス信号が得られないときに画像の変化に基づいて算出される車速を用いて移動距離を算出するようにすれば、確実に従来よりも車両の現在位置決定の精度が向上する。
【0019】
また、好ましくは、請求項3記載のように、前記カメラによって撮像される画像の変化に基づいて前記車両が走行中であるか否かを判定する走行判定手段をさらに備え、前記移動距離算出手段は、その走行判定手段によって走行中であると判定されたにも拘らず、車速センサから車速パルス信号が得られず、且つ、前記車速決定手段による車速決定ができない場合には、車速として、前記車速パルス信号が得られる車速の下限値よりも低く且つゼロよりも大きい一定車速を用いて前記移動距離を算出するようにする。
【0020】
このようにすれば、車速パルス信号が得られず、また、画像の変化に基づいて車速が決定できない場合であっても移動距離が算出されるので、さらに車両の現在位置決定の精度が向上する。
【0021】
また、請求項4記載のように、カメラによって撮像された画像からは、車両が走行中であるかのみを判断し、車両が走行中であるのに車速センサからの車速パルス信号が得られないときは、常に一定の車速であると仮定してもよい。すなわち、請求項4記載の発明は、車両の方位と移動距離とから、その車両の現在位置を逐次決定する車両用現在位置決定装置であって、車速センサからの車速パルス信号が得られない場合に、前記車両に設けられたカメラによって連続的に撮像される車両周辺の画像の変化に基づいて、車両が走行中であるか否かを判定する走行判定手段と、その走行判定手段によって走行中であると判定された場合には、車速として、前記車速パルス信号が得られる車速の下限値よりも低く且つゼロよりも大きい所定の一定値を用いて前記移動距離を算出する移動距離算出手段とを含むことを特徴とする。
【0022】
このようにしても、車速センサからの車速パルス信号が得られない低車速時であっても車両の移動距離が算出されることになって、前述の目的が達成される。
【0023】
また、請求項1乃至4記載の車両用現在位置決定装置は、請求項5のように、前記車両の現在位置に至るまでの走行軌跡と、予め記憶された地図データに基づく道路の形状とを比較するマップマッチング処理を行って、前記車両の現在位置を補正する補正手段をさらに備えている場合に特に有効である。車速パルス信号が得られないような低車速時にも移動距離が算出できるようになると、マップマッチング処理において誤ったマッチングを行ってしまうことが少なくなるからである。
【発明を実施するための最良の形態】
【0024】
以下、本発明の実施の形態を図面に基づいて説明する。図3は、本発明の車両用現在位置決定装置としての機能を備えたナビゲーション装置10の全体構成を示すブロック図である。ナビゲーション装置10は、地図データ記憶手段20、操作スイッチ群30、制御装置40、表示装置50、外部メモリ60、および位置検出装置100を備えている。
【0025】
制御装置40は、通常のコンピュータであり、内部には周知のCPU、ROM、RAM、I/Oおよびこれらの構成を接続するためのバスラインを備えている。ROMには、制御装置40が実行するためのプログラムが書き込まれており、このプログラムに従ってCPU等が所定の演算処理を実行する。
【0026】
位置検出装置100は、衛星からの電波に基づいて車両の位置を測定するグローバルポジショニングシステム(GPS)のためのGPS受信機110、車両の絶対方位を検出するための地磁気センサ120、車両の相対方位を検出するためのジャイロスコープ130、および車速センサ140を有している。車速センサ140は、車両に通常備えられる一般的な構造であり、車速Vに応じた車速パルス信号を出力するが、たとえば数km/h程度である出力下限車速Vminよりも車速Vが低い場合には、車速パルス信号が出力されない構成となっている。また、位置検出装置100は、さらに、カメラ150を有している。このカメラ150は、本実施例ではCCDカメラを用いている。カメラ150は、車速Vを決定するための画像を連続的に取得する画像取得手段として用いられる。カメラ150の取り付け位置は、車両内部の、たとえば運転席近傍の天井等とされており、車両前方の所定範囲の道路状況を撮像する。
【0027】
GPS受信機110は電波航法による車両位置測定のためのものであり、地磁気センサ120、ジャイロスコープ130、車速センサ140およびカメラ150は自立航法による車両位置推定のためのものである。なお、電波航法には、GPSに代えて、道路交通情報通信システム(VICS)の光ビーコンを利用しても良いし、GPSとVICSを併用しても良い。また、自立航法における車両の方位を検出するために、地磁気センサ120およびジャイロスコープ130のいずれか一方のみを用いても良いし、それらに代えて、ステアリングセンサや車両の左右輪に設けられた車輪速センサを用いても良い。また、自立航法のみによって精度が満足される場合には、電波航法のためのGPS受信機110が設けられていなくても良い。
【0028】
地図データ記憶手段20は、たとえばDVD−ROM、CD−ROMなどの図示しない記憶媒体を備え、その記憶媒体には、道路データ、背景データ、文字データ、施設データ、およびマップマッチング用データなどが格納されており、それらのデータを制御装置40に入力する。
【0029】
操作スイッチ群30は、たとえば表示装置50と一体になったタッチスイッチもしくは表示装置50の周辺に設けられるメカニカルなスイッチ等からなり、表示装置50に表示された地図の縮尺変更、メニュー表示選択、目的地設定、自宅位置設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整等の各種入力に使用される。
【0030】
表示装置50は、たとえば液晶ディスプレイ、有機ELディスプレイによって構成され、車両の現在位置に対応する自車位置マーク、地図データによって生成された車両周辺の道路地図などが表示され、また、状況に応じて目的地選択画面等も表示される。
【0031】
外部メモリ60は、たとえば、メモリカードやハードディスク等の書き込み可能な記憶媒体からなる。この外部メモリ60には、ユーザによって設定された自宅位置や、テキストデータ、画像データ、音声データ等の各種データが記憶される。なお、上記画像データには、たとえば、道路標識、信号機、電柱など、道路上またはその周辺に固定されている固定物の画像データが多数含まれている。また、外部メモリ60には、上記画像データが記憶されている固定物について、その種類毎に、カメラ150によって撮像された画像内におけるその固定物の大きさと、車両からの実際の距離との関係も記憶されている。
【0032】
前述の制御装置40は、位置検出装置100からの信号に基づいて推測航法演算を実行して車両の現在位置を逐次決定する。また、推測航法演算によって決定した車両の現在位置を地図データ記憶手段20に格納されたマップマッチングデータと比較することによって車両の現在位置を補正(確定)する。
【0033】
図4は、上述した制御装置40における車両の現在位置決定機能の要部を示すフローチャートである。この図4に示すフローチャートは、比較的短い所定の起動周期Tで繰り返し実行するようになっている。
【0034】
図4において、まず、ステップS100では、方位センサである地磁気センサ120およびジャイロスコープ130からの信号に基づいて車両の方位を決定する。
【0035】
そして、続くステップS110では、図5に詳しく示す処理を実行することにより、図4のルーチンの起動周期Tの間に車両が移動した距離を演算する。
【0036】
図5において、まず、ステップS111では、車速センサ140から車速パルス信号が入力されているか否かを判断する。車速パルス信号が入力されており、ステップS111の判断が肯定された場合には、ステップS112において、前回移動距離を算出してからの車速パルス信号の入力数である車速パルス数に所定の距離係数を乗じることにより移動距離を算出する。この距離係数は、車速センサ140が出力する車速パルス信号の間隔に対応する車両走行距離であり、たとえば0.4mである。
【0037】
一方、車速パルス信号が入力されておらず、ステップS111の判断が否定された場合(すなわち、車速Vが出力下限車速Vminよりも低い場合)には、ステップS113において、カメラ150によって連続的に撮像されている画像から車速Vが判断できるか否かをさらに判断する。この判断は、具体的には、外部メモリ60に画像データが記憶されている固定物が、カメラ150によって撮像された画像内にあるか否かを検索することにより行う。
【0038】
このステップS113の判断が肯定された場合には、ステップS114においてカメラ150によって連続的に撮像されている画像の時間経過に伴う変化から車速Vを決定する。すなわち、まず、少なくとも2つの観測時点において、カメラ150によって撮像された画像内の固定物の大きさを決定する。次いで、その決定した大きさから、外部メモリ60に記憶されているその固定物の大きさと車両からの実際の距離との関係を用いて、各観測時点におけるその固定物と車両との間の相対距離を決定する。そして、決定した相対距離の変化と観測時点間の時間差から車速Vを算出する。
【0039】
一方、ステップS113の判断が否定された場合には、さらに、走行判定手段に相当するステップS115の判断を実行する。このステップS115では、自車が動いているか否かを判断する。この判断は、カメラ150によって連続的に撮像されている画像全体を用いて行い、画像全体が時間の経過に伴って変化しているか否かを判断することにより行う。画像全体を対象としてそれが変化しているか否かを判断するのみであるので、ステップS113において画像データが記憶されている固定物が画像内に検出できない場合でも、このステップS115の判断は可能なのである。
【0040】
そして、自車が動いていると判断した場合には、ステップS116において、車速Vを、0km/hよりも大きく、前述の出力下限車速Vminよりも低い速度に予め設定された一定車速V1(たとえば、V1=Vmin/2)に決定する。また、ステップS115の判断が否定された場合には、ステップS117において車速Vを0km/hに決定する。
【0041】
上記ステップS114、S116、およびS117が車速決定手段に相当し、ステップS114、S116、またはS117を実行したら、移動距離算出手段に相当するステップS118において、そのステップS114、S116、またはS117で決定した車速Vに図4のルーチンの起動周期Tを乗じることにより、移動距離を算出する。
【0042】
図4に戻って、ステップS110の実行後は、ステップS120において現在位置を決定する。すなわち、前回の図4の実行において確定した車両の位置を基準として、ステップS100で決定した方位へ、ステップS110で算出した移動距離だけ移動した位置を現在位置として決定する。なお、このようにして決定する現在位置は自立航法によるものであり、自立航法によって決定した現在位置と、GPS受信機110による現在位置とを比較して、その差が所定距離以上である場合には、GPS受信機110による現在位置を採用するようにしてもよい。
【0043】
続くステップS130は補正手段に相当する。このステップS130では、まず、上記ステップS120で決定した現在位置に基づいて、地図データ記憶手段20から自車両周辺の地図データを読み込み、さらに、その読み込んだ地図データ上においてステップS120で決定した現在位置と所定距離以内の道路、もしくはすでに道路上にその現在位置が位置している場合にはその道路を車両が走行する可能性がある道路として特定する。そして、今回のステップS120の実行によって決定した現在位置、および過去にこの図4を実行することにより決定した複数の現在位置を連結することにより走行軌跡を決定する。その走行軌跡の形状と、車両が走行する可能性のある道路の形状とを比較して、最も相関の高い道路を車両が現在走行している道路として決定するとともに、ステップS120で決定した現在位置がその道路上にない場合には、現在位置をその道路上となるように補正する。
【0044】
以上、説明した本実施形態によれば、車速パルス信号が得られないときであっても、カメラ150によって撮像される画像の変化に基づいて車速Vを決定するので(S114、S116、S117)、車速パルス信号が得られないような低速走行時にも、その車速Vを用いて移動距離を算出することができる。
【0045】
また、本実施形態によれば、車速パルス信号が得られるときには、従来と同様に、その車速パルス信号に基づいて移動距離を算出し、車速パルス信号が得られないときに、画像の変化に基づいて車速Vを決定して、その車速Vを用いて移動距離を算出するようになっているので、確実に従来よりも車両の現在位置決定の精度が向上する。
【0046】
さらに、本実施形態によれば、車両が走行中であるか否かを判断しており(S115)、車両が走行中であるにも拘らず、車速パルス信号が得られず、且つ、画像からも車速Vが決定できない場合にも、車速Vを一定車速V1として移動距離を算出しているので、車両の現在位置決定の精度がさらに向上する。
【0047】
そして、車両の現在位置決定の精度が向上しているので、マップマッチング処理(S130)において誤ったマッチングを行ってしまうことが少なくなる。
【0048】
以上、本発明の実施形態を説明したが、本発明は上述の実施形態に限定されるものではなく、次の実施形態も本発明の技術的範囲に含まれ、さらに、下記以外にも要旨を逸脱しない範囲内で種々変更して実施することができる。
【0049】
たとえば、前述の実施形態では、車速パルス信号が得られるときは、その車速パルス信号に基づいて移動距離を算出していたが、車速パルス信号が得られるときにも画像から車速Vを算出して、その車速Vから移動距離を算出するようにしてもよい。すなわち、図5において、ステップS111およびS112を省略してもよい。
【0050】
また、前述の実施形態では、画像から車速Vが判断できるか否かを判断しており、画像から車速Vが判断できないときであって、走行中であるときにのみ、車速Vを一定車速V1としていたが、車速パルス信号が入力されていないが、走行中であると判断したときには、常に車速Vを一定車速V1としてもよい。すなわち、図5において、ステップS113およびS114を省略してもよい。このようにしても、車速パルス信号が得られないが車両が走行中である状態の移動距離が算出されるので、車速パルス信号が得られないときの移動距離が全く算出されない態様に比較して現在位置の決定精度が向上する。
【0051】
また、図5において、ステップS115およびS116を省略し、ステップS113の判断が否定された場合には常にステップS117を実行するようにしてもよい。このようにしても、画像から車速Vが判断できる状態であれば車速Vが算出されるので(ステップS114)、車速パルス信号が得られないときの移動距離が全く算出されない態様に比較して現在位置の決定精度が向上する。
【0052】
また、前述の実施形態では、車両が単に走行中であるか否かを判断しているのみであり(S115)、その走行が前進走行であるか後進走行であるかを識別していなかったが、車速Vの決定(S114、S116)において、前進と後進とを区別するようにしてもよい(すなわち、後進走行であるときはマイナスの車速Vとする)。前進と後進との区別は、たとえば、シフトポジションセンサからの信号に基づいてシフトレバーの位置を判断することによって行う。あるいは、画像から車速Vを決定することができる場合には(S114)、時間経過に伴う固定物との間の相対距離の変化から前進か後進かを判断してもよい。たとえば、前述の実施形態のようにカメラ150が車両の前方を撮像するように設置されている場合には、時間経過に伴って固定物と車両との相対距離が大きくなっていれば、車両が後進していると判断することができる。
【0053】
また、前述の実施形態では、カメラ150によって撮像された画像に基づく車速Vの決定は、推測航法演算等も行う制御装置40において行っていたが、制御装置40とは別に画像に基づく車速Vの決定のための処理装置を設けることにより、制御装置40の処理負荷を軽減させるようにしてもよい。
【図面の簡単な説明】
【0054】
【図1】特許文献2における移動距離の推定手法を概念的に示す図である。
【図2】車両が車速Vmin未満での走行を継続した場合に、特許文献2の技術を適用したときの算出誤差を示す図である。
【図3】本発明の車両用現在位置決定装置としての機能を備えたナビゲーション装置10の全体構成を示すブロック図である。
【図4】制御装置40における車両の現在位置決定機能の要部を示すフローチャートである。
【図5】図4のステップS110(移動距離の演算)の処理を詳しく示すフローチャートである。
【符号の説明】
【0055】
10:ナビゲーション装置(車両用現在位置決定装置)
40:制御装置
140:車速センサ
150:カメラ
S114、S116、S117:車速決定手段
S115:走行判定手段
S118:移動距離算出手段
S130:補正手段
【特許請求の範囲】
【請求項1】
車両の方位と移動距離とから、その車両の現在位置を逐次決定する車両用現在位置決定装置であって、
前記車両に設けられたカメラによって連続的に撮像される車両周辺の画像の変化に基づいて車速を決定する車速決定手段と、
その車速決定手段によって決定された車速を用いて前記移動距離を算出する移動距離算出手段と
を含むことを特徴とする車両用現在位置決定装置。
【請求項2】
前記移動距離算出手段は、車速センサから車速パルス信号が得られる場合にはその車速パルス信号に基づいて移動距離を算出し、車速パルス信号が得られない場合には前記車速決定手段によって決定される車速を用いて移動距離を算出するものであることを特徴とする請求項1記載の車両用現在位置決定装置。
【請求項3】
請求項2記載の車両用現在位置決定装置であって、
前記カメラによって撮像される画像の変化に基づいて前記車両が走行中であるか否かを判定する走行判定手段をさらに備え、
前記移動距離算出手段は、その走行判定手段によって走行中であると判定されたにも拘らず、車速センサから車速パルス信号が得られず、且つ、前記車速決定手段による車速決定ができない場合には、車速として、前記車速パルス信号が得られる車速の下限値よりも低く且つゼロよりも大きい一定車速を用いて前記移動距離を算出するものである
ことを特徴とする車両用現在位置決定装置。
【請求項4】
車両の方位と移動距離とから、その車両の現在位置を逐次決定する車両用現在位置決定装置であって、
車速センサからの車速パルス信号が得られない場合に、前記車両に設けられたカメラによって連続的に撮像される車両周辺の画像の変化に基づいて、車両が走行中であるか否かを判定する走行判定手段と、
その走行判定手段によって走行中であると判定された場合には、車速として、前記車速パルス信号が得られる車速の下限値よりも低く且つゼロよりも大きい所定の一定値を用いて前記移動距離を算出する移動距離算出手段と
を含むことを特徴とする車両用現在位置決定装置。
【請求項5】
請求項1乃至4のいずれかに記載の車両用現在位置決定装置であって、
前記車両の現在位置に至るまでの走行軌跡と、予め記憶された地図データに基づく道路の形状とを比較するマップマッチング処理を行って、前記車両の現在位置を補正する補正手段をさらに備えていることを特徴とする車両用現在位置決定装置。
【請求項1】
車両の方位と移動距離とから、その車両の現在位置を逐次決定する車両用現在位置決定装置であって、
前記車両に設けられたカメラによって連続的に撮像される車両周辺の画像の変化に基づいて車速を決定する車速決定手段と、
その車速決定手段によって決定された車速を用いて前記移動距離を算出する移動距離算出手段と
を含むことを特徴とする車両用現在位置決定装置。
【請求項2】
前記移動距離算出手段は、車速センサから車速パルス信号が得られる場合にはその車速パルス信号に基づいて移動距離を算出し、車速パルス信号が得られない場合には前記車速決定手段によって決定される車速を用いて移動距離を算出するものであることを特徴とする請求項1記載の車両用現在位置決定装置。
【請求項3】
請求項2記載の車両用現在位置決定装置であって、
前記カメラによって撮像される画像の変化に基づいて前記車両が走行中であるか否かを判定する走行判定手段をさらに備え、
前記移動距離算出手段は、その走行判定手段によって走行中であると判定されたにも拘らず、車速センサから車速パルス信号が得られず、且つ、前記車速決定手段による車速決定ができない場合には、車速として、前記車速パルス信号が得られる車速の下限値よりも低く且つゼロよりも大きい一定車速を用いて前記移動距離を算出するものである
ことを特徴とする車両用現在位置決定装置。
【請求項4】
車両の方位と移動距離とから、その車両の現在位置を逐次決定する車両用現在位置決定装置であって、
車速センサからの車速パルス信号が得られない場合に、前記車両に設けられたカメラによって連続的に撮像される車両周辺の画像の変化に基づいて、車両が走行中であるか否かを判定する走行判定手段と、
その走行判定手段によって走行中であると判定された場合には、車速として、前記車速パルス信号が得られる車速の下限値よりも低く且つゼロよりも大きい所定の一定値を用いて前記移動距離を算出する移動距離算出手段と
を含むことを特徴とする車両用現在位置決定装置。
【請求項5】
請求項1乃至4のいずれかに記載の車両用現在位置決定装置であって、
前記車両の現在位置に至るまでの走行軌跡と、予め記憶された地図データに基づく道路の形状とを比較するマップマッチング処理を行って、前記車両の現在位置を補正する補正手段をさらに備えていることを特徴とする車両用現在位置決定装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2006−317287(P2006−317287A)
【公開日】平成18年11月24日(2006.11.24)
【国際特許分類】
【出願番号】特願2005−140258(P2005−140258)
【出願日】平成17年5月12日(2005.5.12)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成18年11月24日(2006.11.24)
【国際特許分類】
【出願日】平成17年5月12日(2005.5.12)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]