
車両用監視装置
【課題】ドアミラー1,2に設けられたカメラ12,22を用いて、駐車支援や走行時の周辺観察に用いることができる映像を撮像するとともに、車両周囲の安全を監視するために用いることができる映像を撮像する。
【解決手段】
車両Mに取り付けられ、カメラ12,22とミラー本体と13,23が取り付けられたハウジングHを備えるドアミラー1,2と、ドアミラー1,2のハウジングHの向きを変更させるハウジング駆動機構11,21とを備え、車両から取得した動作情報から判断された車両状態パターンに応じて、ハウジング駆動機構11,21にハウジングHの向きを変更させる際に、車両のエンジンがオン状態であるか又はオフ状態であるかの情報を含む動作情報を取得し、この取得した動作情報から判断された車両状態パターンに応じて、ハウジング駆動機構11,21にドアミラー1,2のハウジングHの向きを変更させる制御装置10を備える車両用監視装置100を提供する。
【解決手段】
車両Mに取り付けられ、カメラ12,22とミラー本体と13,23が取り付けられたハウジングHを備えるドアミラー1,2と、ドアミラー1,2のハウジングHの向きを変更させるハウジング駆動機構11,21とを備え、車両から取得した動作情報から判断された車両状態パターンに応じて、ハウジング駆動機構11,21にハウジングHの向きを変更させる際に、車両のエンジンがオン状態であるか又はオフ状態であるかの情報を含む動作情報を取得し、この取得した動作情報から判断された車両状態パターンに応じて、ハウジング駆動機構11,21にドアミラー1,2のハウジングHの向きを変更させる制御装置10を備える車両用監視装置100を提供する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両のドアミラーに設けられたカメラを用いて、車両の周囲を監視する車両用監視装置に関する。
【背景技術】
【0002】
複数のカメラの映像を視点変換し、合成した映像を車室内のモニターに表示するナビゲーション装置等が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−208483号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では、各カメラが目的に応じた視野の映像を取得するので、他の目的に使用することができないという問題がある。例えば、ドアミラーに設けられたカメラは、駐車支援や走行時の周辺観察のために路面側(下方向)の映像を撮像するが、このような路面側(下向き)の映像は車両に接近する不審者などの高さのある物体の全体像を撮像することができないため、車両の安全のために車両周囲を監視する目的に使用することができず、利用目的が限定されるという問題がある。
【0005】
本発明が解決しようとする課題は、ドアミラーに設けられたカメラを用いて、車両の状態に応じて、駐車支援、走行時の周辺観察、及び車両周囲の状態の監視などに用いることができる映像を撮像することである。
【課題を解決するための手段】
【0006】
本発明は、車両のエンジンがオン状態であるか否かなどの動作情報から判断された車両の状態パターンに応じて車両のドアミラーのハウジングの向きを変更することにより、上記課題を解決する。
【発明の効果】
【0007】
本発明によれば、車両の動作情報から判断された車両の状態パターンに応じて車両のドアミラーのハウジングの向きを変更することにより、ハウジングに設けられたカメラの撮像方向を変更することができるので、車両の状態パターンに応じた利用目的に適した撮像方向の映像を取得することができる。この結果、ドアミラーのハウジングに設けられたカメラを用いて、駐車支援や走行時の周辺観察に適した映像のみならず、車両周囲の安全監視に適した映像を、車両の状態に応じて取得することができる。
【図面の簡単な説明】
【0008】
【図1】本発明に係る実施形態の車両用監視装置を含む監視システムの構成図である。
【図2】ドアミラーの設置例を示す図である。
【図3】ドアミラーのハウジングの駆動動作を説明するための第1の図である。
【図4】ドアミラーのハウジングの駆動動作を説明するための第2の図である。
【図5】ドアミラーのハウジングの駆動動作を説明するための第3の図である。
【図6】本発明の実施形態に係る車両監視システムの制御手順を示すフローチャート図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を図面に基づいて説明する。本実施形態では、本発明に係る車両用監視装置100を、外部端末装置800を用いて遠隔監視が可能な監視システム1000に適用した場合を例にして説明する。
【0010】
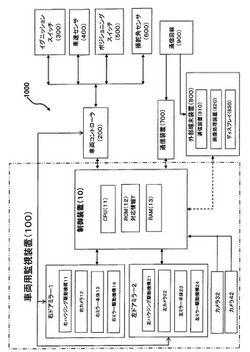
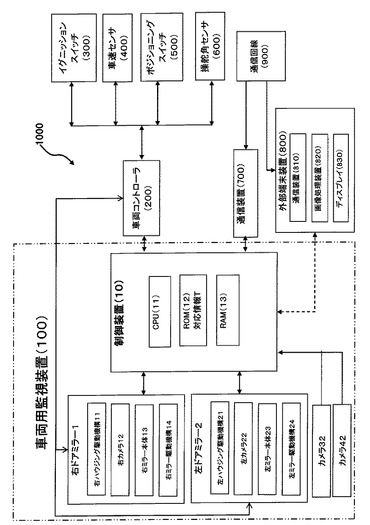
図1は、本実施形態に係る車両用監視装置100を有する監視システム1000のブロック構成図である。図1に示すように、本実施形態の監視システム1000は、車両用監視装置100と、車両コントローラ200と、通信装置700と、外部端末装置800とを有する。この監視システム1000は、車両コントローラ200と情報の授受が可能なイグニッションスイッチ300と、車速センサ400と、ポジショニングスイッチ500と、操舵角センサ600と、を備えることができる。これらの各装置はCAN(Controller Area Network)その他の車載LANによって接続され、相互に情報の授受を行うことができる。
【0011】
同図に示す本実施形態の監視システム1000において、車両用監視装置100は、通信装置700を介して携帯電話、スマートフォンその他の外部端末装置800(コンピュータ)と相互に通信が可能である。また、外部端末装置800は、通信装置810と、画像処理装置820と、ディスプレイ830とを備え、通信装置810が撮像画像を車両用監視装置100側から取得し、画像処理装置820が表示に必要な画像処理を実行し、ディスプレイ821が撮像画像を表示する。外部端末装置800を所持するユーザは、車両用監視装置100から送出された車両の撮像画像を、遠隔の地点にても確認することができる。
【0012】
また、同図に示すように、車両用監視装置100は、右ドアミラー1と、左ドアミラー2(ドアミラー1,2と総称することもある。以下同じ)と、制御装置10とを備える。
【0013】
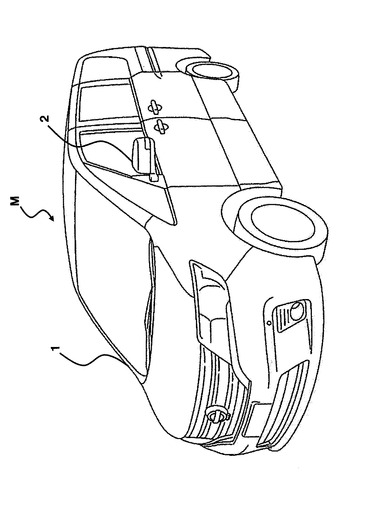
図2は、車両に設置された右ドアミラー1と左ドアミラー2を示す図である。図2に示すように、右ドアミラー1は車両Mの右側ドアに設けられ、左ドアミラー2は車両Mの左側ドアに設けられている。図示はしないが、右ドアミラー1と左ドアミラー2の他にも、車両後方や車両前方にカメラ32、42を設けることができる。
【0014】
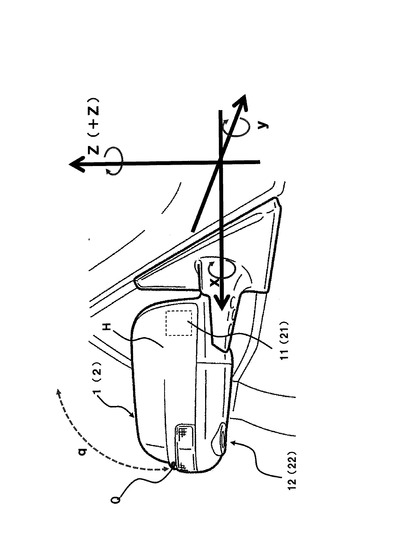
図3は、右ドアミラー1を車両前方側から見た図である。左ドアミラー2は右ドアミラー1と対称に表れるため、図示を省略する。図3に示すように、右ドアミラー1(左ドアミラー2)のハウジングHには、カメラ12(22)が設けられている(右カメラ12、左カメラ22を、カメラ12,22と総称することもある、以下、同じ)。カメラ12(22)は、通常時において、その撮像方向が車両の下側、つまり走行路面側に向くように取り付けられている。カメラ12(22)はCCD(Charge Coupled Devices)等の撮像素子を用いて構成され、所定の撮像方向の映像を撮像する。なお、特に限定されないが、本実施形態のカメラ12(22)としては、広角のカメラ12(22)を使用することができる。
【0015】
本実施形態の各ドアミラー1(2)のハウジンングH内部には、各ドアミラー1(2)のハウジングHを回転駆動させるモータを含む右ハウジング駆動機構11が設けられている(右ハウジング駆動機構11と左ハウジング駆動機構21を総称して、ハウジング駆動機構11,21等と称する。以下同じ)。本実施形態の各ハウジング駆動機構11(21)は、制御装置10からの駆動命令やミラーコントロールスイッチからの入力指令に従い、電源が供給されると、各ハウジングHを図中に示すx軸、y軸、z軸を回転軸として回転駆動させ、各ドアミラー1,2の向きを上下左右に変更させることができる。ちなみに、x軸は車両の車軸方向に沿い、y軸は車両の長さ方向に沿い、z軸は車両の高さ方向(重力方向)に沿う方向である(他図においても同じ)。
【0016】
具体的に、図3に示す右ドアミラー1は、各ハウジング駆動機構11(21)により、y軸を回転軸として向きを変えることができる。具体的に、ハウジングHを、y軸を回転軸として駆動させると、図3のハウジングHに点Qで示す部分は軌道qに沿って上側(z軸側)へ移動させることができる。つまり下方向(路面側:図3のz軸下方向)を撮像していた右カメラ12の撮像方向は、車両Mの横方向(車両側方側:図3のx軸方向)に変更される。つまり、y軸を回転軸としてハウジングHを駆動させると、右カメラ12の光軸はx軸に沿う方向、又はx軸方向成分を持つ方向に向き、車両Mの横方向の映像を撮像することができる。
【0017】
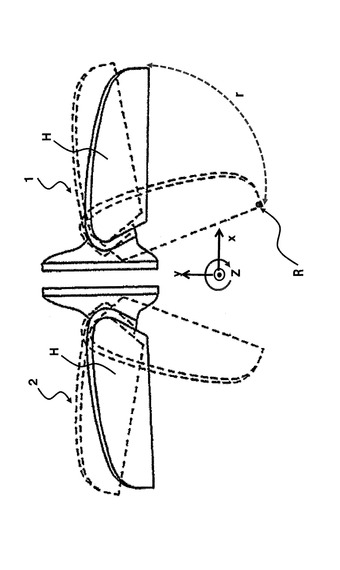
また、図4に示すように、右ドアミラー1,左ドアミラー2のハウジングHは、各ハウジングHに設けられた各ハウジング駆動機構11、21により、z軸を回転軸として向きを変えることができる。ハウジングHを、z軸を回転軸として駆動させると、図4のハウジングHに点Rで示す部分が軌道rに沿って車体幅(x軸側)に沿って移動させることができる。この駆動により、ドアミラー1,2を格納する(車体側に折り畳む)ことができる。
【0018】
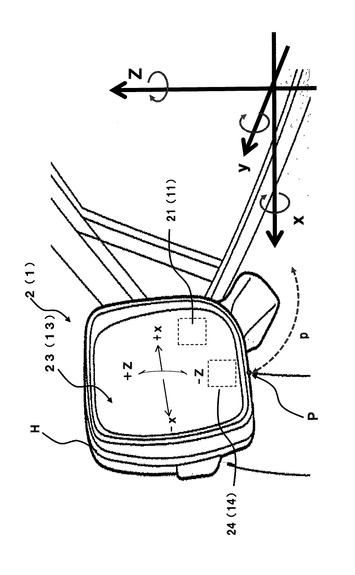
図5は左ドアミラー2を車両後側から見た図である。右ドアミラー1は左ドアミラー2と対称に表れるため、図示を省略する。図5に示すように、左ドアミラー2(1)のハウジングHは、各ハウジングHに設けられた各ハウジング駆動機構21(11)により、x軸を回転軸として向きを変えることができる。ハウジングHを、x軸を回転軸として駆動させると、図6のハウジングHの下端部に点Pで示す部分が軌道pに沿って車体長さ方向(y軸に沿う車両後方側)へ移動させることができる。もちろん、ハウジングHの下端部に点Pは反対側の方向(y軸に沿う車両前方側)も移動させることができる。つまり下方向(路面側:図5のz軸下方向)を撮像していた右カメラ12の撮像方向は、車両Mの前方向又は後方向(図5のy軸方向)に変更される。つまり、x軸を回転軸としてハウジングHを駆動させると、右カメラ12は、車両Mの前方向又は後方向の映像を撮像することができる。
【0019】
なお、各ハウジング駆動機構21(21)は、制御装置10からx軸成分、y軸成分、z軸成分のいずれか一つ以上の成分を含む駆動命令に従い、一方向だけではなく、各ハウジングHを任意の方向に向けることができる。
【0020】
同図に示すように、本実施形態の左ドアミラー2(1)のハウジングHには、左ミラー本体23(13)が設けられている(左ミラー本体23と右ミラー本体を、各ミラー本体13,23等と総称することもある。以下同じ)本実施形態の各ハウジングHは、各ミラー本体23(13)の鏡面の向きを変更させる左ミラー駆動機構24(14)を備えることができる(左ミラー駆動機構24と右ミラー駆動機構14とを、ミラー駆動機構14,24等と総称することもある。以下同じ)。この左ミラー駆動機構24(14)により、左ミラー本体23(13)の鏡面は上下又は左右に動かすことができる。図5に示すように、左ミラー駆動機構24(14)は、左ミラー本体23(13)を、鏡面の中心部を通るz軸を回転軸として左右に駆動することができ、鏡面の中心部を通るz軸を回転軸として上下に駆動することができる。つまり、左ミラー本体23(13)の鏡面を、z軸を支軸として鏡面の左端又は右端がハウジングH内に押しこまれるように動かすとともに、x軸を支軸として鏡面の上端又は下端がハウジングH内に押しこまれるように動かすことができる。
【0021】
なお、上述した各ハウジング駆動機構11、21及び/又は各ミラー駆動機構14,24の具体的な構成及び動作は特に限定されず、出願時に知られているドアミラーコントロールシステム、ミラーコントロールシステムに用いられる機構を適宜に用いることができる。
【0022】
ここで図1に戻り、上述の各ハウジング駆動機構11、21及び各ミラー駆動機構14,24を制御する、本実施形態に係る車両用監視装置100の制御装置10について説明する。制御装置10は、各ハウジング駆動機構11、21及び各ミラー駆動機構14,24の動作を制御するプログラムが格納されたROM(Read Only Memory)12と、このROM12に格納されたプログラムを実行することで、車両用監視装置100として機能する動作回路としてのCPU(Central Processing Unit)11と、アクセス可能な記憶装置として機能するRAM(Random Access Memory)13と、を備えている。
【0023】
また、本実施形態の制御装置10のCPU11は、画像処理コントロールユニット(Image Processing Control Unit: IPCU)を備える。制御装置10は、画像処理コントロールユニットを用いて、カメラ12,22,32,42から取得した撮像画像を解析し、撮像データから物体に対応する画像を抽出し、さらに抽出した画像に基づいて物体の動きを追跡し、経時的な物体の位置の変化(車両に対する存在位置又は車両に対する存在方向)を算出することができる。なお、これらの画像処理には、出願時に知られている手法を用いることができる。
【0024】
本実施形態に係る車両用監視装置100の制御装置10は、制御機能を実現するためのソフトウェアと、上述したハードウェアの協働により各機能を実行することができる。本実施形態では、制御装置10が、各ハウジング駆動機構11、21及び各ミラー駆動機構14,24に駆動命令を送る態様を例にして説明するが、本実施形態の制御装置10は、車両コントローラ200を介して各ハウジング駆動機構11、21及び各ミラー駆動機構14,24を制御することも可能である。
【0025】
以下に、車両用監視装置100の制御装置10が実現するハウジング駆動制御機能、ミラー駆動制御機能、移動体検出機能と、送信機能について説明する。
【0026】
まず、ハウジング駆動制御機能について説明する。本実施形態の制御装置10は、車両から取得した動作情報から判断された車両状態パターンに応じて、右ハウジング駆動機構11及び/又は左ハウジング駆動機構21に、右ドアミラー1及び/又は左ドアミラー2のハウジングHの向きを変更させる駆動命令を送出する。
【0027】
本実施形態における車両の動作情報は、エンジンのオンオフ情報、車両のシフトポジション、車両の車速、カメラのオン/オフ、及び車両の操舵角のうち一つ又は複数の情報を含む。制御装置10は、車両のエンジンのオンオフ信号を、イグニッションスイッチ300又は図外のエンジン制御装置から取得することができ、車両の車速を車速センサ400から取得することができ、車両のシフトポジションをポジショニングスイッチ500から取得することができ、カメラのオンオフ信号を右カメラ12、左カメラ22から取得することができ、車両の操舵角を操舵角センサ600から取得することができる。本実施形態の制御装置10は、これらの動作情報を、車両コントローラ200を介して取得することができる。
【0028】
本実施形態の制御装置10は、車両のエンジンがオン状態であるか又はオフ状態であるかの情報を含む動作情報を取得し、この取得した動作情報から判断された車両状態パターンに応じて、ハウジング駆動機構11,21にドアミラーのハウジングの向きを変更させることができる。特に限定されないが、本実施形態における車両状態パターンは、車両が走行中である走行支援モードと、車両が駐車操作中である駐車支援モードと、乗員が降車して車両から離れ、遠隔で車両の安全を見る遠隔監視モードとを、少なくとも含む。
【0029】
特に限定されないが、本実施形態の制御装置10は、車両のエンジンがオン状態であるか又はオフ状態であるかの情報(動作情報)を、車両コントローラ200を介して取得し、この取得した動作情報から車両状態パターンを判断する。本実施形態において、制御装置10は、エンジンがオフ状態である場合には、車両状態パターンが遠隔監視モードであると判断することができる。また、制御装置10は、エンジンがオン状態である場合には、車両状態パターンが駐車支援モード、走行支援モードのいずれかであると判断することができる。
【0030】
本実施形態の制御装置10は、判断された車両状態パターンに応じて、ハウジング駆動機構11,21にドアミラー1,2のハウジングHの向きを変更させることができる。
【0031】
本実施形態の制御装置10は、下掲の表1に示すように、車両側から取得した動作情報の組み合わせと、車両状態パターンとを予め対応情報Tに定義しておくことができる。制御装置10は、予め定義された対応情報Tを参照して、取得した動作情報から車両状態パターンを判断することができる。
【0032】
【表1】

【0033】
具体的に、本実施形態の制御装置10は、車両のエンジンがオフ状態である旨の情報に対応する、イグニッションスイッチがオフ状態であるという内容の動作情報を取得した場合には、カメラ12,22の撮像方向が、エンジンがオン状態である場合のカメラ12,22の撮像方向よりも上向きになるように、ドアミラー1,2のハウジングHの向きを変更させる駆動命令を、各ハウジング駆動機構11,21へ送出する。本実施形態における上向きとは、車両が水平に載置されている場合の水平面を基準とした場合に、車両の載置面(路面)とは反対側の方向(天)の成分を有する向きである。図3を例にすると、ドアミラー1,2のハウジングHの向きを上向きにする場合には、ハウジングHの可動部が、このハウジングHの取り付け位置を含むxy平面よりも+z方向側に移動する。具体的に、制御装置10は、少なくとも、y軸を回転軸とし、ドアミラー1,2の点Qを含む端部が上側に移動するように、右ドアミラー1については時計回り回転、左ドアミラー2については反時計回り回転動作を含む動作を実行させる駆動命令を各ハウジング駆動機構11,21へ送出する。各ハウジング駆動機構11,21は、制御装置10から取得した駆動命令に従い、各ドアミラー1、2のハウジングHを駆動させる。なお、制御装置10は、y軸回りの回転成分を含む駆動命令には、x軸回りの回転成分、z軸回りの回転成分の何れか又は両方を含めることができる。
【0034】
各ハウジング駆動機構11,21がy軸回りの回転成分を含む動きの駆動命令に基づいてハウジングHを回転駆動させると、カメラ12,22の撮像方向(光軸)の向きが、エンジンがオン状態であるときの下向き(路面側:図3のz軸下方向)に比べて、横向き(車両側方側:図3のx軸方向)に変化する。各ドアミラー1、2に取り付けられたカメラ12,22の撮像方向を車体の横方向にすると、ドアミラー1,2の高さから車体の周囲を撮像できるので、車両周囲に存在する高さのある物体の全体(不審者の全身)を撮像することができる。また、ドアミラー1,2の高さから車体の周囲を撮像すると、不審者等を撮像領域の中央部分で捉えることができるので、カメラ12,22が広角である場合であっても、不審者の明瞭な画像を得ることができる。ちなみに、カメラ12,22が下向きであると、車両周囲の不審者が撮像領域の境界近傍で捉えられる場合が多くなるので、不審者を捉えた画像の画質が低下するという不都合や、撮像領域の境界近傍や遠方に存在する不審者の大きさが実際よりも小さく捉えられてしまい、映像の内容が分かり難いという不都合が生じるが、本実施形態のように、カメラ12,22をy軸中心に回転させ、ドアミラー1,2の高さから車体の周囲を撮像することにより、このような不都合を解消することができる。
【0035】
また、本実施形態の制御装置10は、表1に示すように、エンジンがオン状態であり、シフトポジションがリバースである旨の動作情報を取得した場合には、車両状態パターンが駐車支援モードであると判断し、各カメラ12,22の撮像方向が下向きになるように(図3、図5の状態となるように)、ドアミラー1,2のハウジングHの向きを変更させることができる。具体的に、制御装置10は、少なくとも、x軸又はy軸を回転軸とし、各カメラ12,22の撮像方向が下向きになるような回転駆動命令を各ハウジング駆動機構11,21へ送出する。各ハウジング駆動機構11,21は、制御装置10から取得した駆動命令に従い、各ドアミラー1、2のハウジングHを駆動させる。なお、制御装置10は、x軸回りの回転成分、y軸回りの回転成分を含む駆動命令に、z軸回りの回転成分を含めることができる。
【0036】
さらに、本実施形態の制御装置10は、表1に示すように、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度以上(例えば10Km/h以上)である旨の動作情報を取得した場合には、車両状態パターンが走行支援モードであると判断し、カメラ12,22の撮像方向が後側方になるように、ドアミラー1,2のハウジングHの向きを変更させることができる。具体的に、制御装置10は、少なくとも、x軸を回転軸とし、各カメラ12,22の撮像方向が後側方になるような回転駆動命令を各ハウジング駆動機構11,21へ送出する。各ハウジング駆動機構11,21は、制御装置10から取得した駆動命令に従い、各ドアミラー1,2のハウジングHを駆動させる。なお、制御装置10は、x軸回りの回転成分を含む駆動命令に、y軸回りの回転成分、z軸回りの回転成分を含めることができる。なお、表1には、所定速度として10km/h以上、10km/h未満を例示したが、走行中であるか又は駐車操作中であるかを判断するための閾値としての所定速度は任意に設定することができる。
【0037】
加えて、本実施形態の制御装置10は、表1に示すように、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度未満(例えば10Km/h未満)であり、カメラ12,22がオフ状態である旨の動作情報を取得した場合には、車両状態パターンが走行支援モードであると判断し、カメラ12,22の撮像方向が後側方になるようにドアミラー1,2のハウジングHの向きを変更させる。また、本実施形態の制御装置10は、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度未満(例えば10Km/h未満)であり、カメラ12,22がオン状態である旨の動作情報を取得した場合には、車両状態パターンが駐車支援モードであると判断し、カメラ12,22の撮像方向が下向きになるように、ドアミラー1,2のハウジングHの向きを変更させる。いずれの場合も低速走行中乃至停車の状態であるが、カメラ12,22が動作中である場合には、駐車支援システムが稼働している可能性が高く、駐車支援システムが稼働している場合には、駐車操作を支援するために下向きの撮像方向で撮影した映像を提供することが好ましいからである。
【0038】
具体的に、制御装置10は、少なくとも、x軸を回転軸とし、各カメラ12,22の撮像方向が後側方になるような回転駆動命令を各ハウジング駆動機構11,21へ送出する。各ハウジング駆動機構11,21は、制御装置10から取得した駆動命令に従い、各ドアミラー1、2のハウジングHを駆動させる。なお、制御装置10は、x軸回りの回転成分を含む駆動命令に、y軸回りの回転成分、z軸回りの回転成分を含めることができる。
【0039】
さらに、本実施形態の制御装置10は、表1に示すように、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度未満(例えば10Km/h未満)であり、カメラ12,22がオフ状態である動作情報を取得した場合は、走行支援モードであると判断できるが、この状態は一連の駐車操作における一部の操作中の状態である可能性がある。この場合において、ハウジングHの向きを変えてしまうと、カメラ12,22の撮像方向も変化してしまうので、カメラ12,22の映像を見ながら駐車操作をしているドライバにとっては煩わしい。このため、本実施形態では、動作情報から表1の車両状態パターン3の走行支援モードを導いた場合であっても、直前の動作情報が駐車支援モードを示す場合には、車両は駐車操作中であると判断し、ハウジングHの向きを変えないようにする。
【0040】
つまり、本実施形態の制御装置10は、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度未満であり、カメラ12,22がオフ状態である動作情報を取得した場合に、その動作情報を取得する直前に取得した動作情報が、エンジンがオン状態であり、シフトポジションがリバースである旨の動作情報である場合(車両状態パターン1の場合)、又はエンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度未満であり、カメラ12,22がオン状態である旨の動作情報である場合には、ドアミラー1,2のハウジングHの向きの変更を実行しない。これにより、駐車操作の途中でカメラ12,22の撮像方向が変更されることを防止することができる。
【0041】
本実施形態の制御装置10は、シフトポジションがリバースの場合には動作情報として操舵角を考慮することができる。本実施形態の制御装置10は、下掲の表2に示すように、車両側から取得した操舵角を含む動作情報の組み合わせと、車両状態パターンとを予め対応情報Tとして定義することができる。制御装置10は、予め定義された対応情報Tを参照して、取得した動作情報から車両状態パターンを判断することができる。
【0042】
【表2】
【0043】
本実施形態の制御装置10は、エンジンがオン状態であり、シフトポジションがリバースであり、車両の操舵角が所定値以上である旨の動作情報を取得した場合には、車両状態パターンが走行支援モードであると判断し、カメラ12,22の撮像方向が後側方になるように、ドアミラー1,2のハウジングHの向きを変更させ、エンジンがオン状態であり、シフトポジションがリバースであり、車両の操舵角が所定値未満である旨の動作情報を取得した場合には、車両状態パターンが駐車支援モードであると判断し、カメラ12,22の撮像方向が下向きになるように、ドアミラー1,2のハウジングHの向きを変更させる。具体的に、制御装置10は、少なくとも、x軸を回転軸とし、各カメラ12,22の撮像方向が後側方又は下方向になるような回転駆動命令を各ハウジング駆動機構11,21へ送出する。各ハウジング駆動機構11,21は、制御装置10から取得した駆動命令に従い、各ドアミラー1、2のハウジングHを駆動させる。なお、制御装置10は、x軸回りの回転成分を含む駆動命令に、y軸回りの回転成分、z軸回りの回転成分を含めることができる。
【0044】
操舵角を考慮した制御において、制御装置10は、操舵角の方向に応じて右ドアミラー1又は左ドアミラー2の何れか一方のみのハウジングHを駆動させることができる。制御装置10は、車両の操舵角が右方向への操舵である旨の動作情報を取得した場合には、車両の右側の右ドアミラー1のハウジングHの向きを変更させ、車両の操舵角が左方向への操舵である旨の動作情報を取得した場合には、車両の左側の左ドアミラー2のハウジングHの向きを変更させることができる。これにより、カメラ12,22の撮像方向の変更が必要な方のドアミラー1,2のみを駆動させることができる。
【0045】
このように、本実施形態の制御装置10は、車両の動作情報から判断された車両状態パターンに応じて、各ハウジング駆動機構11,21に各ドアミラー1,2のハウジングHの向きを変更させるが、ハウジングHの向きが変わるとミラー本体13,23の向きも変わる。しかし、車両状態パターンに応じてカメラ12,22の撮像方向は変更したいが、ミラー本体13,23の向きは変更したくない場合がある。
【0046】
この要求に対応するため、本実施形態の車両用監視装置100の制御装置10は、ミラー駆動制御機能を備える。制御装置10は、ハウジング駆動機構11,21によるハウジングHの向きの変更量に基づいて、各ミラー駆動機構14,24(右ミラー駆動機構14、左ミラー駆動機構24を総称している。以下同じ)にミラー本体13.23の鏡面の向きを変更させることができる。具体的に、制御装置10は、ハウジング駆動機構11,21に送出するハウジングHの向きを変更させるための回転駆動軸、回転駆動方向、回転量、回転速度を含む制御指令に基づいて、このハウジングHの動きがミラー本体13、23の向きに影響を与えないように、ハウジングHの動きを打ち消すような回転駆動軸、回転駆動方向、回転量、回転速度を含む駆動命令を生成する。このミラー本体13,23の駆動命令は、ミラー本体13、23の動きがハウジングHの動きを打ち消すことができる内容であることが好ましい。つまり、制御装置10は、ハウジングHの駆動命令とミラー本体13,23の駆動命令とが実行された場合には、ハウジングHの経時的な動きとミラー本体13,23の経時的な動きが同期し、ミラー本体13,23の鏡面の位置が経時的に維持されるような駆動命令を生成する。
【0047】
例えば、本実施形態の制御装置10は、車両状態パターンが走行支援モードから駐車支援モードへ、駐車支援モードから走行支援モードへ変わった場合には、カメラ12,22の光軸を車両の状態に応じた撮像方向へ向けさせるための駆動命令をハウジング駆動機構11,21に送出するとともに、ミラー本体13、23の向きを維持させるための駆動命令(ハウジングHの動きを打ち消すための駆動命令)を各ミラー駆動機構14,24に送出する。
【0048】
各ミラー駆動機構14,24は、制御装置10から受信した駆動命令を実行することにより、ハウジングHの向きが変更されても、ミラー本体13,23の向きを一定に保つことができる。このように、車両状態パターンに応じてハウジングHの向きが変更されても、ミラー本体13、23の向きは変更されないので、運転者は違和感なく、ミラー本体13,23に映る車両周囲の状況を確認しながら運転操作をすることができる。
【0049】
次に、本実施形態の制御装置10の移動体検出機能について説明する。本実施形態の制御装置10は、車両状態パターンが遠隔監視モードである場合には、検出した移動体を追跡する画像を撮像することができる。
【0050】
本実施形態の制御装置10は、カメラ12,22の撮像画像に基づいて車両周囲の移動体及びその移動方向を検出することができる。先述したとおり、本実施形態の制御装置10は、画像処理コントロールユニット(Image Processing Control Unit: IPCU)を備えており、制御装置10は、画像処理コントロールユニットを用いて、車両に搭載されたカメラ12,22,32,42などの撮像画像を解析し、撮像データから物体に対応する画像を抽出し、さらに抽出した画像に基づいて物体の動きを追跡し、経時的な物体の位置の変化(車両に対する存在位置又は車両に対する存在方向)を算出することができる。
【0051】
また、制御装置10は、撮像画像に含まれる移動体に対応する画像の位置(画像座標上の位置)に基づいて、その移動体の存在方向を算出することができる。制御装置10は、移動体の存在方向に沿う撮像方向を算出する。そして、制御装置10は、移動体の存在方向を撮像するためのカメラ12,22の撮像方向を算出する。
【0052】
制御装置10は、エンジンがオフ状態である旨の動作情報を取得し、車両状態パターンが遠隔監視モードであると判断した場合であって、移動体が検出された場合には、検出された移動体の存在方向又はこの移動体の移動方向に応じて、ドアミラー1,2のハウジングHの向きを変更させる駆動命令を生成し、各ハウジング駆動機構11,21へ送出する。各ハウジング駆動機構11、21は、駆動命令に従ってドアミラー1,2のハウジングHを駆動させることにより、移動体を追跡して撮像することができる。これにより、遠隔監視時に、自動的に移動体を追跡した映像を撮像することができるので、車両に危険が生じた場合であっても、遠隔から車両の状態を正確に把握することができ、適切に対処することができる。
【0053】
最後に、本実施形態の制御装置10の通信機能について説明する。本実施形態の制御装置10は、外部の通信機能を備える端末装置との通信機能を備え、車両のエンジンがオフ状態である旨の動作情報を取得し、車両状態パターンが遠隔監視モードであると判断した場合には、カメラ12,22により撮像された映像のデータを車両の外部の端末装置800に送出することができる。端末装置800は、通信装置810が受信した映像のデータを、画像処理装置820に処理させ、ディスプレイ830に表示させる。これにより、車両のオーナーは車両から離れた位置においても、自分の車両の状況を映像で確認することができる。
【0054】
続いて、図6のフローチャート図に基づいて、本実施形態の監視システム1000の制御手順を説明する。
【0055】
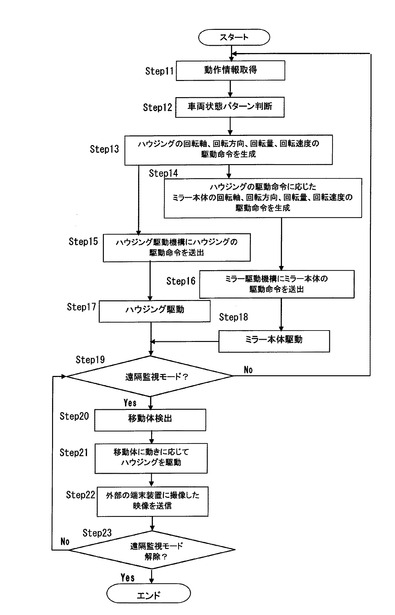
まず、車両用監視装置100の制御装置10は、ステップ11において、車両コントローラ200から車両の動作情報を所定周期で取得し、ステップ12において、動作情報に基づいて車両状態パターンを判断する。本実施形態では、予め動作情報と車両状態パターンとの関係が予め定義された対応情報T(表1、表2参照)に基づいて、動作情報から車両状態パターンを判断する。
【0056】
ステップ13において、制御装置10は車両状態パターンに応じたハウジングHの駆動命令を生成する。この駆動命令には、ハウジングHの回転軸(x,y,z)回転方向、回転量、回転速度の情報を含む。
【0057】
続くステップ14において、制御装置10は、ステップ13において生成されたハウジングHの駆動命令に基づいて、ミラー本体13,23の駆動命令を生成する。この駆動命令には、ミラー本体13、23Hの回転軸(x,y,z)回転方向、回転量、回転速度の情報を含む。
【0058】
そして、ステップ15において、制御装置10はステップ13において生成したハウジングHの駆動命令をハウジング駆動機構11,21へ送出し、ステップ16において、制御装置10はステップ14において生成したミラー本体13,23の駆動命令をミラー駆動機構14,24へ送出する。
【0059】
ステップ17において、ハウジング駆動機構11,21はステップ15で送出された駆動命令に基づいてハウジングHを駆動する。
【0060】
同じく、ステップ18において、ミラー駆動機構14,24はステップ16で送出された駆動命令に基づいてミラー本体13、23を駆動する。ミラー本体13,23の駆動は、ハウジングHの駆動と経時的に同期させるので、ハウジングHの向きを変えつつ、ミラー本体13、23の鏡面の位置(向き)を維持させることができる。
【0061】
制御装置10が車両状態パターンを遠隔監視モードであると判断した場合には(ステップ19)ステップ20へ進み、遠隔にいるユーザの外部端末装置800に映像を送信する。ステップ20において、制御装置10はカメラ12,22の撮像した画像に基づいて移動体の存在位置、存在方向を検出する。画像から移動体に関する情報の検出手法は、前述のとおり、既知の手法を適宜に利用することができる。
【0062】
ステップ21において、制御装置10は検出された移動体の存在方向に応じて、ハウジングHの設けられたカメラ12、22の撮像方向が移動体の存在方向と一致するように、ハウジングHの向きを変更させる駆動命令を生成し、ハウジング駆動機構11,21へ送出する。ハウジング駆動機構11、21はこの駆動命令に従いハウジングHの向きを駆動させる。ハウジングHが駆動すると、カメラ12,22の光軸を移動体の存在方向に合わせることができるので、カメラ12、22は移動体を撮像することができる。
【0063】
ステップ22において、制御装置10は、カメラ12、22が撮像した映像を外部端末装置800へ送信する。外部端末装置800は、受信した映像をディスプレイ830に表示し、車両の周囲の状況をユーザに提示する。
【0064】
ステップ20以降の処理は、遠隔監視モードが解除されるまで(たとえば、イグニッションキーがオンとなりエンジンが駆動を開始するまで)継続される。
【0065】
本発明は以上のように構成され、以上のように作用するので、以下の効果を奏する。
【0066】
本実施形態の車両用監視装置100、監視システム1000によれば、車両の動作情報から判断された車両状態パターンに応じて車両のドアミラー1,2のハウジングHの向きを変更することにより、ハウジングHに設けられたカメラ12,22の撮像方向を変更することができるので、車両状態パターンに応じた撮像方向の映像を取得することができる。この結果、ハウジングHに設けられたカメラ12,22を用いて、駐車支援や走行時の周辺観察に適した映像のみならず、車両周囲の安全監視に適した映像を、車両の状態に応じて取得することができる。
【0067】
たとえば、本実施形態の車両用監視装置100は、エンジンがオン状態であるか、オフ状態であるかの動作情報に応じた車両状態パターンに応じてドアミラー1,2のハウジングHの向きを変えるので、エンジンがオン状態の場合には駐車支援や走行時の周辺観察に適した映像を取得し、エンジンがオフ状態の場合には車両周囲の安全監視に適した映像を取得することができる。
【0068】
本実施形態の車両用監視装置100は、ハウジング駆動機構11,21によるハウジングHの向きの変更量に基づいて、ミラー駆動機構14,24にミラー本体13、23の鏡面の向きを変更させるので、ハウジングHが駆動してもミラー本体13,23の向きを一定に保つことができる。このように、車両状態パターンに応じてハウジングHの向きが変更されても、ミラー本体13、23の向きは変更されないので、運転者は違和感なく、ミラー本体13,23に映る車両周囲の状況を確認しながら運転操作をすることができる。
【0069】
本実施形態の車両用監視装置100は、車両の車速、シフトポジション、カメラ12,22のオン/オフ、及び車両の操舵角のうち一つ又は複数の情報を動作情報とするので、車両の状態を正確に判断することができる。つまり、これらの動作情報から、現在の車両の状況において駐車支援や走行時の周辺観察に適した映像が必要であるか、車両周囲の安全監視に適した映像が必要であるかを正確に判断することができる。
【0070】
本実施形態の車両用監視装置100は、エンジンがオフ状態である旨の動作情報を取得した場合には、カメラ12,22の撮像方向が、エンジンがオン状態である場合のカメラ12,22の撮像方向よりも上向きになるように、ドアミラー1,2のハウジングHの向きを変更させることにより、カメラ12,22の撮像方向(光軸)の向きを、エンジンがオン状態であるときの下向きに比べて、横向きに変化させることができる。各ドアミラー1、2に取り付けられたカメラ12,22の撮像方向を車体の横方向にすることで、ドアミラー1,2の高さから車体の周囲を撮像できるので、車両周囲に存在する高さのある物体の全体(不審者の全身)を撮像することができる。
また、ドアミラー1,2の高さから車体の周囲を撮像すると、不審者等を撮像領域の中央部分で捉えることができるので、カメラ12,22が広角である場合であっても、不審者の明瞭な画像を得ることができる。
【0071】
本実施形態の車両用監視装置100は、エンジンがオン状態であり、シフトポジションがリバースである旨の動作情報を取得した場合には、車両が駐車状態であると判断できるので、カメラ12,22の撮像方向が下向きになるように、ドアミラー1,2のハウジングHの向きを変更させることにより、駐車支援に適した映像を撮像することができる。
【0072】
本実施形態の車両用監視装置100は、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度以上である旨の動作情報を取得した場合には、車両が通常走行状態であると判断できるので、カメラ12,22の撮像方向が後側方になるように、ドアミラー1,2のハウジングHの向きを変更させることにより、走行支援に適した映像を撮像することができる。
【0073】
本実施形態の車両用監視装置100は、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度未満であるときに、カメラ12,22がオフ状態である旨の動作情報を取得した場合には、カメラ12,22の撮像方向が後側方になるようにドアミラー1,2のハウジングHの向きを変更させ、他方、カメラ12,22がオン状態である旨の動作情報を取得した場合には、カメラ12,22の撮像方向が下向きになるように、前記ドアミラーのハウジングの向きを変更させる。カメラ12,22がオン状態である場合には駐車支援のプログラムが実行されている可能性が高いと判断し、駐車支援に適した映像を撮像することができる。
【0074】
本実施形態の車両用監視装置100は、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度未満であり、カメラ12.22がオフ状態である動作情報を取得し、車両状態パターンが走行支援モードであると判断されたた場合であっても、直前に判断された車両状態パターンが駐車支援モードである場合にはドアミラー1,2のハウジングHの向きの変更を実行しないので、駐車操作の途中でカメラ12,22の撮像方向が変更されることを防止することができる。
【0075】
本実施形態の車両用監視装置100は、エンジンがオン状態であり、シフトポジションがリバースである動作情報を取得し、車両状態パターンが駐車支援モードであると判断されたた場合に、車両の操舵角が所定値以上である旨の動作情報を取得した場合には、カメラ12,22の撮像方向が後側方になるように、ドアミラー1,2のハウジングHの向きを変更させ、車両の操舵角が所定値未満である旨の動作情報を取得した場合には、カメラ12,22の撮像方向が下向きになるように、ドアミラー1,2のハウジングHの向きを変更させるので、駐車操作のうち車両を大きく旋回させるときには後ろ方向の状態を確認できる映像を撮像し、車両を直進させる(縦列駐車させる)ときには下方向(路面方向)の状態を確認できる映像を撮像することができる。
【0076】
本実施形態の車両用監視装置100は、車両の操舵角が右方向への操舵である旨の動作情報を取得した場合には、車両の右側のドアミラー1のハウジングHの向きを変更させ、車両の操舵角が左方向への操舵である旨の動作情報を取得した場合には、車両の左側のドアミラー2のハウジングHの向きを変更させるので、確認を要する方向(左又は右)のドアミラー1,2のハウジングのみを駆動させることができる。
【0077】
本実施形態の車両用監視装置100は、カメラ12、22の映像から移動体を検出し、その移動体の存在方向又は移動方向に応じてドアミラーのハウジングHの向きを変更させるので、移動体を追跡した映像を取得することができる。
【0078】
本実施形態の車両用監視装置100は、遠隔監視モードの場合にはカメラ12、22により撮像された映像を外部端末装置800に送出するので、車両のオーナーは車両から離れた位置においても、自分の車両の状況を映像で確認することができる。
【0079】
なお、以上説明したすべての実施形態は、本発明の理解を容易にするために記載されたものであって、本発明を限定するために記載されたものではない。したがって、上記の実施形態に開示された各要素は、本発明の技術的範囲に属する全ての設計変更や均等物をも含む趣旨である。
【0080】
本明細書では、本発明に係る車両用監視装置の一態様として車両用監視装置100及び監視システム1000を例にして説明するが、本発明はこれに限定されるものではない。
【0081】
また、本明細書では、本発明に係る車両用監視装置の一態様として、カメラ12、22の向きを変更させるハウジング駆動機構11、21と、ミラー本体13,23の鏡面の向きを変更させるミラー駆動機構14、24を制御可能な、CPU11、ROM12、RAM13を含む制御装置10を備える車両用監視装置100を一例として説明するが、これに限定されるものではない。
【0082】
本明細書では、ハウジング駆動制御手段と、ミラー駆動制御手段と、移動体検出手段と、送信手段とを有する本発明に係る車両用監視装置の一態様として、ハウジング駆動制御機能と、ミラー駆動制御機能と、移動体検出機能と、送信機能を備える制御装置10を有する車両用監視装置100を説明するが、これに限定されるものではない。
【符号の説明】
【0083】
1000…監視システム
100…車両用監視装置
M…車両
10…制御装置
11…CPU
12…ROM
13…RAM
200…車両コントローラ
300…イグニッションスイッチ
400…車速センサ
500…ポジショニングスイッチ
600…操舵角センサ
700…通信装置
800…外部端末装置
900…通信回線
【技術分野】
【0001】
本発明は、車両のドアミラーに設けられたカメラを用いて、車両の周囲を監視する車両用監視装置に関する。
【背景技術】
【0002】
複数のカメラの映像を視点変換し、合成した映像を車室内のモニターに表示するナビゲーション装置等が知られている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−208483号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の技術では、各カメラが目的に応じた視野の映像を取得するので、他の目的に使用することができないという問題がある。例えば、ドアミラーに設けられたカメラは、駐車支援や走行時の周辺観察のために路面側(下方向)の映像を撮像するが、このような路面側(下向き)の映像は車両に接近する不審者などの高さのある物体の全体像を撮像することができないため、車両の安全のために車両周囲を監視する目的に使用することができず、利用目的が限定されるという問題がある。
【0005】
本発明が解決しようとする課題は、ドアミラーに設けられたカメラを用いて、車両の状態に応じて、駐車支援、走行時の周辺観察、及び車両周囲の状態の監視などに用いることができる映像を撮像することである。
【課題を解決するための手段】
【0006】
本発明は、車両のエンジンがオン状態であるか否かなどの動作情報から判断された車両の状態パターンに応じて車両のドアミラーのハウジングの向きを変更することにより、上記課題を解決する。
【発明の効果】
【0007】
本発明によれば、車両の動作情報から判断された車両の状態パターンに応じて車両のドアミラーのハウジングの向きを変更することにより、ハウジングに設けられたカメラの撮像方向を変更することができるので、車両の状態パターンに応じた利用目的に適した撮像方向の映像を取得することができる。この結果、ドアミラーのハウジングに設けられたカメラを用いて、駐車支援や走行時の周辺観察に適した映像のみならず、車両周囲の安全監視に適した映像を、車両の状態に応じて取得することができる。
【図面の簡単な説明】
【0008】
【図1】本発明に係る実施形態の車両用監視装置を含む監視システムの構成図である。
【図2】ドアミラーの設置例を示す図である。
【図3】ドアミラーのハウジングの駆動動作を説明するための第1の図である。
【図4】ドアミラーのハウジングの駆動動作を説明するための第2の図である。
【図5】ドアミラーのハウジングの駆動動作を説明するための第3の図である。
【図6】本発明の実施形態に係る車両監視システムの制御手順を示すフローチャート図である。
【発明を実施するための形態】
【0009】
以下、本発明の実施形態を図面に基づいて説明する。本実施形態では、本発明に係る車両用監視装置100を、外部端末装置800を用いて遠隔監視が可能な監視システム1000に適用した場合を例にして説明する。
【0010】
図1は、本実施形態に係る車両用監視装置100を有する監視システム1000のブロック構成図である。図1に示すように、本実施形態の監視システム1000は、車両用監視装置100と、車両コントローラ200と、通信装置700と、外部端末装置800とを有する。この監視システム1000は、車両コントローラ200と情報の授受が可能なイグニッションスイッチ300と、車速センサ400と、ポジショニングスイッチ500と、操舵角センサ600と、を備えることができる。これらの各装置はCAN(Controller Area Network)その他の車載LANによって接続され、相互に情報の授受を行うことができる。
【0011】
同図に示す本実施形態の監視システム1000において、車両用監視装置100は、通信装置700を介して携帯電話、スマートフォンその他の外部端末装置800(コンピュータ)と相互に通信が可能である。また、外部端末装置800は、通信装置810と、画像処理装置820と、ディスプレイ830とを備え、通信装置810が撮像画像を車両用監視装置100側から取得し、画像処理装置820が表示に必要な画像処理を実行し、ディスプレイ821が撮像画像を表示する。外部端末装置800を所持するユーザは、車両用監視装置100から送出された車両の撮像画像を、遠隔の地点にても確認することができる。
【0012】
また、同図に示すように、車両用監視装置100は、右ドアミラー1と、左ドアミラー2(ドアミラー1,2と総称することもある。以下同じ)と、制御装置10とを備える。
【0013】
図2は、車両に設置された右ドアミラー1と左ドアミラー2を示す図である。図2に示すように、右ドアミラー1は車両Mの右側ドアに設けられ、左ドアミラー2は車両Mの左側ドアに設けられている。図示はしないが、右ドアミラー1と左ドアミラー2の他にも、車両後方や車両前方にカメラ32、42を設けることができる。
【0014】
図3は、右ドアミラー1を車両前方側から見た図である。左ドアミラー2は右ドアミラー1と対称に表れるため、図示を省略する。図3に示すように、右ドアミラー1(左ドアミラー2)のハウジングHには、カメラ12(22)が設けられている(右カメラ12、左カメラ22を、カメラ12,22と総称することもある、以下、同じ)。カメラ12(22)は、通常時において、その撮像方向が車両の下側、つまり走行路面側に向くように取り付けられている。カメラ12(22)はCCD(Charge Coupled Devices)等の撮像素子を用いて構成され、所定の撮像方向の映像を撮像する。なお、特に限定されないが、本実施形態のカメラ12(22)としては、広角のカメラ12(22)を使用することができる。
【0015】
本実施形態の各ドアミラー1(2)のハウジンングH内部には、各ドアミラー1(2)のハウジングHを回転駆動させるモータを含む右ハウジング駆動機構11が設けられている(右ハウジング駆動機構11と左ハウジング駆動機構21を総称して、ハウジング駆動機構11,21等と称する。以下同じ)。本実施形態の各ハウジング駆動機構11(21)は、制御装置10からの駆動命令やミラーコントロールスイッチからの入力指令に従い、電源が供給されると、各ハウジングHを図中に示すx軸、y軸、z軸を回転軸として回転駆動させ、各ドアミラー1,2の向きを上下左右に変更させることができる。ちなみに、x軸は車両の車軸方向に沿い、y軸は車両の長さ方向に沿い、z軸は車両の高さ方向(重力方向)に沿う方向である(他図においても同じ)。
【0016】
具体的に、図3に示す右ドアミラー1は、各ハウジング駆動機構11(21)により、y軸を回転軸として向きを変えることができる。具体的に、ハウジングHを、y軸を回転軸として駆動させると、図3のハウジングHに点Qで示す部分は軌道qに沿って上側(z軸側)へ移動させることができる。つまり下方向(路面側:図3のz軸下方向)を撮像していた右カメラ12の撮像方向は、車両Mの横方向(車両側方側:図3のx軸方向)に変更される。つまり、y軸を回転軸としてハウジングHを駆動させると、右カメラ12の光軸はx軸に沿う方向、又はx軸方向成分を持つ方向に向き、車両Mの横方向の映像を撮像することができる。
【0017】
また、図4に示すように、右ドアミラー1,左ドアミラー2のハウジングHは、各ハウジングHに設けられた各ハウジング駆動機構11、21により、z軸を回転軸として向きを変えることができる。ハウジングHを、z軸を回転軸として駆動させると、図4のハウジングHに点Rで示す部分が軌道rに沿って車体幅(x軸側)に沿って移動させることができる。この駆動により、ドアミラー1,2を格納する(車体側に折り畳む)ことができる。
【0018】
図5は左ドアミラー2を車両後側から見た図である。右ドアミラー1は左ドアミラー2と対称に表れるため、図示を省略する。図5に示すように、左ドアミラー2(1)のハウジングHは、各ハウジングHに設けられた各ハウジング駆動機構21(11)により、x軸を回転軸として向きを変えることができる。ハウジングHを、x軸を回転軸として駆動させると、図6のハウジングHの下端部に点Pで示す部分が軌道pに沿って車体長さ方向(y軸に沿う車両後方側)へ移動させることができる。もちろん、ハウジングHの下端部に点Pは反対側の方向(y軸に沿う車両前方側)も移動させることができる。つまり下方向(路面側:図5のz軸下方向)を撮像していた右カメラ12の撮像方向は、車両Mの前方向又は後方向(図5のy軸方向)に変更される。つまり、x軸を回転軸としてハウジングHを駆動させると、右カメラ12は、車両Mの前方向又は後方向の映像を撮像することができる。
【0019】
なお、各ハウジング駆動機構21(21)は、制御装置10からx軸成分、y軸成分、z軸成分のいずれか一つ以上の成分を含む駆動命令に従い、一方向だけではなく、各ハウジングHを任意の方向に向けることができる。
【0020】
同図に示すように、本実施形態の左ドアミラー2(1)のハウジングHには、左ミラー本体23(13)が設けられている(左ミラー本体23と右ミラー本体を、各ミラー本体13,23等と総称することもある。以下同じ)本実施形態の各ハウジングHは、各ミラー本体23(13)の鏡面の向きを変更させる左ミラー駆動機構24(14)を備えることができる(左ミラー駆動機構24と右ミラー駆動機構14とを、ミラー駆動機構14,24等と総称することもある。以下同じ)。この左ミラー駆動機構24(14)により、左ミラー本体23(13)の鏡面は上下又は左右に動かすことができる。図5に示すように、左ミラー駆動機構24(14)は、左ミラー本体23(13)を、鏡面の中心部を通るz軸を回転軸として左右に駆動することができ、鏡面の中心部を通るz軸を回転軸として上下に駆動することができる。つまり、左ミラー本体23(13)の鏡面を、z軸を支軸として鏡面の左端又は右端がハウジングH内に押しこまれるように動かすとともに、x軸を支軸として鏡面の上端又は下端がハウジングH内に押しこまれるように動かすことができる。
【0021】
なお、上述した各ハウジング駆動機構11、21及び/又は各ミラー駆動機構14,24の具体的な構成及び動作は特に限定されず、出願時に知られているドアミラーコントロールシステム、ミラーコントロールシステムに用いられる機構を適宜に用いることができる。
【0022】
ここで図1に戻り、上述の各ハウジング駆動機構11、21及び各ミラー駆動機構14,24を制御する、本実施形態に係る車両用監視装置100の制御装置10について説明する。制御装置10は、各ハウジング駆動機構11、21及び各ミラー駆動機構14,24の動作を制御するプログラムが格納されたROM(Read Only Memory)12と、このROM12に格納されたプログラムを実行することで、車両用監視装置100として機能する動作回路としてのCPU(Central Processing Unit)11と、アクセス可能な記憶装置として機能するRAM(Random Access Memory)13と、を備えている。
【0023】
また、本実施形態の制御装置10のCPU11は、画像処理コントロールユニット(Image Processing Control Unit: IPCU)を備える。制御装置10は、画像処理コントロールユニットを用いて、カメラ12,22,32,42から取得した撮像画像を解析し、撮像データから物体に対応する画像を抽出し、さらに抽出した画像に基づいて物体の動きを追跡し、経時的な物体の位置の変化(車両に対する存在位置又は車両に対する存在方向)を算出することができる。なお、これらの画像処理には、出願時に知られている手法を用いることができる。
【0024】
本実施形態に係る車両用監視装置100の制御装置10は、制御機能を実現するためのソフトウェアと、上述したハードウェアの協働により各機能を実行することができる。本実施形態では、制御装置10が、各ハウジング駆動機構11、21及び各ミラー駆動機構14,24に駆動命令を送る態様を例にして説明するが、本実施形態の制御装置10は、車両コントローラ200を介して各ハウジング駆動機構11、21及び各ミラー駆動機構14,24を制御することも可能である。
【0025】
以下に、車両用監視装置100の制御装置10が実現するハウジング駆動制御機能、ミラー駆動制御機能、移動体検出機能と、送信機能について説明する。
【0026】
まず、ハウジング駆動制御機能について説明する。本実施形態の制御装置10は、車両から取得した動作情報から判断された車両状態パターンに応じて、右ハウジング駆動機構11及び/又は左ハウジング駆動機構21に、右ドアミラー1及び/又は左ドアミラー2のハウジングHの向きを変更させる駆動命令を送出する。
【0027】
本実施形態における車両の動作情報は、エンジンのオンオフ情報、車両のシフトポジション、車両の車速、カメラのオン/オフ、及び車両の操舵角のうち一つ又は複数の情報を含む。制御装置10は、車両のエンジンのオンオフ信号を、イグニッションスイッチ300又は図外のエンジン制御装置から取得することができ、車両の車速を車速センサ400から取得することができ、車両のシフトポジションをポジショニングスイッチ500から取得することができ、カメラのオンオフ信号を右カメラ12、左カメラ22から取得することができ、車両の操舵角を操舵角センサ600から取得することができる。本実施形態の制御装置10は、これらの動作情報を、車両コントローラ200を介して取得することができる。
【0028】
本実施形態の制御装置10は、車両のエンジンがオン状態であるか又はオフ状態であるかの情報を含む動作情報を取得し、この取得した動作情報から判断された車両状態パターンに応じて、ハウジング駆動機構11,21にドアミラーのハウジングの向きを変更させることができる。特に限定されないが、本実施形態における車両状態パターンは、車両が走行中である走行支援モードと、車両が駐車操作中である駐車支援モードと、乗員が降車して車両から離れ、遠隔で車両の安全を見る遠隔監視モードとを、少なくとも含む。
【0029】
特に限定されないが、本実施形態の制御装置10は、車両のエンジンがオン状態であるか又はオフ状態であるかの情報(動作情報)を、車両コントローラ200を介して取得し、この取得した動作情報から車両状態パターンを判断する。本実施形態において、制御装置10は、エンジンがオフ状態である場合には、車両状態パターンが遠隔監視モードであると判断することができる。また、制御装置10は、エンジンがオン状態である場合には、車両状態パターンが駐車支援モード、走行支援モードのいずれかであると判断することができる。
【0030】
本実施形態の制御装置10は、判断された車両状態パターンに応じて、ハウジング駆動機構11,21にドアミラー1,2のハウジングHの向きを変更させることができる。
【0031】
本実施形態の制御装置10は、下掲の表1に示すように、車両側から取得した動作情報の組み合わせと、車両状態パターンとを予め対応情報Tに定義しておくことができる。制御装置10は、予め定義された対応情報Tを参照して、取得した動作情報から車両状態パターンを判断することができる。
【0032】
【表1】
【0033】
具体的に、本実施形態の制御装置10は、車両のエンジンがオフ状態である旨の情報に対応する、イグニッションスイッチがオフ状態であるという内容の動作情報を取得した場合には、カメラ12,22の撮像方向が、エンジンがオン状態である場合のカメラ12,22の撮像方向よりも上向きになるように、ドアミラー1,2のハウジングHの向きを変更させる駆動命令を、各ハウジング駆動機構11,21へ送出する。本実施形態における上向きとは、車両が水平に載置されている場合の水平面を基準とした場合に、車両の載置面(路面)とは反対側の方向(天)の成分を有する向きである。図3を例にすると、ドアミラー1,2のハウジングHの向きを上向きにする場合には、ハウジングHの可動部が、このハウジングHの取り付け位置を含むxy平面よりも+z方向側に移動する。具体的に、制御装置10は、少なくとも、y軸を回転軸とし、ドアミラー1,2の点Qを含む端部が上側に移動するように、右ドアミラー1については時計回り回転、左ドアミラー2については反時計回り回転動作を含む動作を実行させる駆動命令を各ハウジング駆動機構11,21へ送出する。各ハウジング駆動機構11,21は、制御装置10から取得した駆動命令に従い、各ドアミラー1、2のハウジングHを駆動させる。なお、制御装置10は、y軸回りの回転成分を含む駆動命令には、x軸回りの回転成分、z軸回りの回転成分の何れか又は両方を含めることができる。
【0034】
各ハウジング駆動機構11,21がy軸回りの回転成分を含む動きの駆動命令に基づいてハウジングHを回転駆動させると、カメラ12,22の撮像方向(光軸)の向きが、エンジンがオン状態であるときの下向き(路面側:図3のz軸下方向)に比べて、横向き(車両側方側:図3のx軸方向)に変化する。各ドアミラー1、2に取り付けられたカメラ12,22の撮像方向を車体の横方向にすると、ドアミラー1,2の高さから車体の周囲を撮像できるので、車両周囲に存在する高さのある物体の全体(不審者の全身)を撮像することができる。また、ドアミラー1,2の高さから車体の周囲を撮像すると、不審者等を撮像領域の中央部分で捉えることができるので、カメラ12,22が広角である場合であっても、不審者の明瞭な画像を得ることができる。ちなみに、カメラ12,22が下向きであると、車両周囲の不審者が撮像領域の境界近傍で捉えられる場合が多くなるので、不審者を捉えた画像の画質が低下するという不都合や、撮像領域の境界近傍や遠方に存在する不審者の大きさが実際よりも小さく捉えられてしまい、映像の内容が分かり難いという不都合が生じるが、本実施形態のように、カメラ12,22をy軸中心に回転させ、ドアミラー1,2の高さから車体の周囲を撮像することにより、このような不都合を解消することができる。
【0035】
また、本実施形態の制御装置10は、表1に示すように、エンジンがオン状態であり、シフトポジションがリバースである旨の動作情報を取得した場合には、車両状態パターンが駐車支援モードであると判断し、各カメラ12,22の撮像方向が下向きになるように(図3、図5の状態となるように)、ドアミラー1,2のハウジングHの向きを変更させることができる。具体的に、制御装置10は、少なくとも、x軸又はy軸を回転軸とし、各カメラ12,22の撮像方向が下向きになるような回転駆動命令を各ハウジング駆動機構11,21へ送出する。各ハウジング駆動機構11,21は、制御装置10から取得した駆動命令に従い、各ドアミラー1、2のハウジングHを駆動させる。なお、制御装置10は、x軸回りの回転成分、y軸回りの回転成分を含む駆動命令に、z軸回りの回転成分を含めることができる。
【0036】
さらに、本実施形態の制御装置10は、表1に示すように、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度以上(例えば10Km/h以上)である旨の動作情報を取得した場合には、車両状態パターンが走行支援モードであると判断し、カメラ12,22の撮像方向が後側方になるように、ドアミラー1,2のハウジングHの向きを変更させることができる。具体的に、制御装置10は、少なくとも、x軸を回転軸とし、各カメラ12,22の撮像方向が後側方になるような回転駆動命令を各ハウジング駆動機構11,21へ送出する。各ハウジング駆動機構11,21は、制御装置10から取得した駆動命令に従い、各ドアミラー1,2のハウジングHを駆動させる。なお、制御装置10は、x軸回りの回転成分を含む駆動命令に、y軸回りの回転成分、z軸回りの回転成分を含めることができる。なお、表1には、所定速度として10km/h以上、10km/h未満を例示したが、走行中であるか又は駐車操作中であるかを判断するための閾値としての所定速度は任意に設定することができる。
【0037】
加えて、本実施形態の制御装置10は、表1に示すように、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度未満(例えば10Km/h未満)であり、カメラ12,22がオフ状態である旨の動作情報を取得した場合には、車両状態パターンが走行支援モードであると判断し、カメラ12,22の撮像方向が後側方になるようにドアミラー1,2のハウジングHの向きを変更させる。また、本実施形態の制御装置10は、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度未満(例えば10Km/h未満)であり、カメラ12,22がオン状態である旨の動作情報を取得した場合には、車両状態パターンが駐車支援モードであると判断し、カメラ12,22の撮像方向が下向きになるように、ドアミラー1,2のハウジングHの向きを変更させる。いずれの場合も低速走行中乃至停車の状態であるが、カメラ12,22が動作中である場合には、駐車支援システムが稼働している可能性が高く、駐車支援システムが稼働している場合には、駐車操作を支援するために下向きの撮像方向で撮影した映像を提供することが好ましいからである。
【0038】
具体的に、制御装置10は、少なくとも、x軸を回転軸とし、各カメラ12,22の撮像方向が後側方になるような回転駆動命令を各ハウジング駆動機構11,21へ送出する。各ハウジング駆動機構11,21は、制御装置10から取得した駆動命令に従い、各ドアミラー1、2のハウジングHを駆動させる。なお、制御装置10は、x軸回りの回転成分を含む駆動命令に、y軸回りの回転成分、z軸回りの回転成分を含めることができる。
【0039】
さらに、本実施形態の制御装置10は、表1に示すように、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度未満(例えば10Km/h未満)であり、カメラ12,22がオフ状態である動作情報を取得した場合は、走行支援モードであると判断できるが、この状態は一連の駐車操作における一部の操作中の状態である可能性がある。この場合において、ハウジングHの向きを変えてしまうと、カメラ12,22の撮像方向も変化してしまうので、カメラ12,22の映像を見ながら駐車操作をしているドライバにとっては煩わしい。このため、本実施形態では、動作情報から表1の車両状態パターン3の走行支援モードを導いた場合であっても、直前の動作情報が駐車支援モードを示す場合には、車両は駐車操作中であると判断し、ハウジングHの向きを変えないようにする。
【0040】
つまり、本実施形態の制御装置10は、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度未満であり、カメラ12,22がオフ状態である動作情報を取得した場合に、その動作情報を取得する直前に取得した動作情報が、エンジンがオン状態であり、シフトポジションがリバースである旨の動作情報である場合(車両状態パターン1の場合)、又はエンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度未満であり、カメラ12,22がオン状態である旨の動作情報である場合には、ドアミラー1,2のハウジングHの向きの変更を実行しない。これにより、駐車操作の途中でカメラ12,22の撮像方向が変更されることを防止することができる。
【0041】
本実施形態の制御装置10は、シフトポジションがリバースの場合には動作情報として操舵角を考慮することができる。本実施形態の制御装置10は、下掲の表2に示すように、車両側から取得した操舵角を含む動作情報の組み合わせと、車両状態パターンとを予め対応情報Tとして定義することができる。制御装置10は、予め定義された対応情報Tを参照して、取得した動作情報から車両状態パターンを判断することができる。
【0042】
【表2】
【0043】
本実施形態の制御装置10は、エンジンがオン状態であり、シフトポジションがリバースであり、車両の操舵角が所定値以上である旨の動作情報を取得した場合には、車両状態パターンが走行支援モードであると判断し、カメラ12,22の撮像方向が後側方になるように、ドアミラー1,2のハウジングHの向きを変更させ、エンジンがオン状態であり、シフトポジションがリバースであり、車両の操舵角が所定値未満である旨の動作情報を取得した場合には、車両状態パターンが駐車支援モードであると判断し、カメラ12,22の撮像方向が下向きになるように、ドアミラー1,2のハウジングHの向きを変更させる。具体的に、制御装置10は、少なくとも、x軸を回転軸とし、各カメラ12,22の撮像方向が後側方又は下方向になるような回転駆動命令を各ハウジング駆動機構11,21へ送出する。各ハウジング駆動機構11,21は、制御装置10から取得した駆動命令に従い、各ドアミラー1、2のハウジングHを駆動させる。なお、制御装置10は、x軸回りの回転成分を含む駆動命令に、y軸回りの回転成分、z軸回りの回転成分を含めることができる。
【0044】
操舵角を考慮した制御において、制御装置10は、操舵角の方向に応じて右ドアミラー1又は左ドアミラー2の何れか一方のみのハウジングHを駆動させることができる。制御装置10は、車両の操舵角が右方向への操舵である旨の動作情報を取得した場合には、車両の右側の右ドアミラー1のハウジングHの向きを変更させ、車両の操舵角が左方向への操舵である旨の動作情報を取得した場合には、車両の左側の左ドアミラー2のハウジングHの向きを変更させることができる。これにより、カメラ12,22の撮像方向の変更が必要な方のドアミラー1,2のみを駆動させることができる。
【0045】
このように、本実施形態の制御装置10は、車両の動作情報から判断された車両状態パターンに応じて、各ハウジング駆動機構11,21に各ドアミラー1,2のハウジングHの向きを変更させるが、ハウジングHの向きが変わるとミラー本体13,23の向きも変わる。しかし、車両状態パターンに応じてカメラ12,22の撮像方向は変更したいが、ミラー本体13,23の向きは変更したくない場合がある。
【0046】
この要求に対応するため、本実施形態の車両用監視装置100の制御装置10は、ミラー駆動制御機能を備える。制御装置10は、ハウジング駆動機構11,21によるハウジングHの向きの変更量に基づいて、各ミラー駆動機構14,24(右ミラー駆動機構14、左ミラー駆動機構24を総称している。以下同じ)にミラー本体13.23の鏡面の向きを変更させることができる。具体的に、制御装置10は、ハウジング駆動機構11,21に送出するハウジングHの向きを変更させるための回転駆動軸、回転駆動方向、回転量、回転速度を含む制御指令に基づいて、このハウジングHの動きがミラー本体13、23の向きに影響を与えないように、ハウジングHの動きを打ち消すような回転駆動軸、回転駆動方向、回転量、回転速度を含む駆動命令を生成する。このミラー本体13,23の駆動命令は、ミラー本体13、23の動きがハウジングHの動きを打ち消すことができる内容であることが好ましい。つまり、制御装置10は、ハウジングHの駆動命令とミラー本体13,23の駆動命令とが実行された場合には、ハウジングHの経時的な動きとミラー本体13,23の経時的な動きが同期し、ミラー本体13,23の鏡面の位置が経時的に維持されるような駆動命令を生成する。
【0047】
例えば、本実施形態の制御装置10は、車両状態パターンが走行支援モードから駐車支援モードへ、駐車支援モードから走行支援モードへ変わった場合には、カメラ12,22の光軸を車両の状態に応じた撮像方向へ向けさせるための駆動命令をハウジング駆動機構11,21に送出するとともに、ミラー本体13、23の向きを維持させるための駆動命令(ハウジングHの動きを打ち消すための駆動命令)を各ミラー駆動機構14,24に送出する。
【0048】
各ミラー駆動機構14,24は、制御装置10から受信した駆動命令を実行することにより、ハウジングHの向きが変更されても、ミラー本体13,23の向きを一定に保つことができる。このように、車両状態パターンに応じてハウジングHの向きが変更されても、ミラー本体13、23の向きは変更されないので、運転者は違和感なく、ミラー本体13,23に映る車両周囲の状況を確認しながら運転操作をすることができる。
【0049】
次に、本実施形態の制御装置10の移動体検出機能について説明する。本実施形態の制御装置10は、車両状態パターンが遠隔監視モードである場合には、検出した移動体を追跡する画像を撮像することができる。
【0050】
本実施形態の制御装置10は、カメラ12,22の撮像画像に基づいて車両周囲の移動体及びその移動方向を検出することができる。先述したとおり、本実施形態の制御装置10は、画像処理コントロールユニット(Image Processing Control Unit: IPCU)を備えており、制御装置10は、画像処理コントロールユニットを用いて、車両に搭載されたカメラ12,22,32,42などの撮像画像を解析し、撮像データから物体に対応する画像を抽出し、さらに抽出した画像に基づいて物体の動きを追跡し、経時的な物体の位置の変化(車両に対する存在位置又は車両に対する存在方向)を算出することができる。
【0051】
また、制御装置10は、撮像画像に含まれる移動体に対応する画像の位置(画像座標上の位置)に基づいて、その移動体の存在方向を算出することができる。制御装置10は、移動体の存在方向に沿う撮像方向を算出する。そして、制御装置10は、移動体の存在方向を撮像するためのカメラ12,22の撮像方向を算出する。
【0052】
制御装置10は、エンジンがオフ状態である旨の動作情報を取得し、車両状態パターンが遠隔監視モードであると判断した場合であって、移動体が検出された場合には、検出された移動体の存在方向又はこの移動体の移動方向に応じて、ドアミラー1,2のハウジングHの向きを変更させる駆動命令を生成し、各ハウジング駆動機構11,21へ送出する。各ハウジング駆動機構11、21は、駆動命令に従ってドアミラー1,2のハウジングHを駆動させることにより、移動体を追跡して撮像することができる。これにより、遠隔監視時に、自動的に移動体を追跡した映像を撮像することができるので、車両に危険が生じた場合であっても、遠隔から車両の状態を正確に把握することができ、適切に対処することができる。
【0053】
最後に、本実施形態の制御装置10の通信機能について説明する。本実施形態の制御装置10は、外部の通信機能を備える端末装置との通信機能を備え、車両のエンジンがオフ状態である旨の動作情報を取得し、車両状態パターンが遠隔監視モードであると判断した場合には、カメラ12,22により撮像された映像のデータを車両の外部の端末装置800に送出することができる。端末装置800は、通信装置810が受信した映像のデータを、画像処理装置820に処理させ、ディスプレイ830に表示させる。これにより、車両のオーナーは車両から離れた位置においても、自分の車両の状況を映像で確認することができる。
【0054】
続いて、図6のフローチャート図に基づいて、本実施形態の監視システム1000の制御手順を説明する。
【0055】
まず、車両用監視装置100の制御装置10は、ステップ11において、車両コントローラ200から車両の動作情報を所定周期で取得し、ステップ12において、動作情報に基づいて車両状態パターンを判断する。本実施形態では、予め動作情報と車両状態パターンとの関係が予め定義された対応情報T(表1、表2参照)に基づいて、動作情報から車両状態パターンを判断する。
【0056】
ステップ13において、制御装置10は車両状態パターンに応じたハウジングHの駆動命令を生成する。この駆動命令には、ハウジングHの回転軸(x,y,z)回転方向、回転量、回転速度の情報を含む。
【0057】
続くステップ14において、制御装置10は、ステップ13において生成されたハウジングHの駆動命令に基づいて、ミラー本体13,23の駆動命令を生成する。この駆動命令には、ミラー本体13、23Hの回転軸(x,y,z)回転方向、回転量、回転速度の情報を含む。
【0058】
そして、ステップ15において、制御装置10はステップ13において生成したハウジングHの駆動命令をハウジング駆動機構11,21へ送出し、ステップ16において、制御装置10はステップ14において生成したミラー本体13,23の駆動命令をミラー駆動機構14,24へ送出する。
【0059】
ステップ17において、ハウジング駆動機構11,21はステップ15で送出された駆動命令に基づいてハウジングHを駆動する。
【0060】
同じく、ステップ18において、ミラー駆動機構14,24はステップ16で送出された駆動命令に基づいてミラー本体13、23を駆動する。ミラー本体13,23の駆動は、ハウジングHの駆動と経時的に同期させるので、ハウジングHの向きを変えつつ、ミラー本体13、23の鏡面の位置(向き)を維持させることができる。
【0061】
制御装置10が車両状態パターンを遠隔監視モードであると判断した場合には(ステップ19)ステップ20へ進み、遠隔にいるユーザの外部端末装置800に映像を送信する。ステップ20において、制御装置10はカメラ12,22の撮像した画像に基づいて移動体の存在位置、存在方向を検出する。画像から移動体に関する情報の検出手法は、前述のとおり、既知の手法を適宜に利用することができる。
【0062】
ステップ21において、制御装置10は検出された移動体の存在方向に応じて、ハウジングHの設けられたカメラ12、22の撮像方向が移動体の存在方向と一致するように、ハウジングHの向きを変更させる駆動命令を生成し、ハウジング駆動機構11,21へ送出する。ハウジング駆動機構11、21はこの駆動命令に従いハウジングHの向きを駆動させる。ハウジングHが駆動すると、カメラ12,22の光軸を移動体の存在方向に合わせることができるので、カメラ12、22は移動体を撮像することができる。
【0063】
ステップ22において、制御装置10は、カメラ12、22が撮像した映像を外部端末装置800へ送信する。外部端末装置800は、受信した映像をディスプレイ830に表示し、車両の周囲の状況をユーザに提示する。
【0064】
ステップ20以降の処理は、遠隔監視モードが解除されるまで(たとえば、イグニッションキーがオンとなりエンジンが駆動を開始するまで)継続される。
【0065】
本発明は以上のように構成され、以上のように作用するので、以下の効果を奏する。
【0066】
本実施形態の車両用監視装置100、監視システム1000によれば、車両の動作情報から判断された車両状態パターンに応じて車両のドアミラー1,2のハウジングHの向きを変更することにより、ハウジングHに設けられたカメラ12,22の撮像方向を変更することができるので、車両状態パターンに応じた撮像方向の映像を取得することができる。この結果、ハウジングHに設けられたカメラ12,22を用いて、駐車支援や走行時の周辺観察に適した映像のみならず、車両周囲の安全監視に適した映像を、車両の状態に応じて取得することができる。
【0067】
たとえば、本実施形態の車両用監視装置100は、エンジンがオン状態であるか、オフ状態であるかの動作情報に応じた車両状態パターンに応じてドアミラー1,2のハウジングHの向きを変えるので、エンジンがオン状態の場合には駐車支援や走行時の周辺観察に適した映像を取得し、エンジンがオフ状態の場合には車両周囲の安全監視に適した映像を取得することができる。
【0068】
本実施形態の車両用監視装置100は、ハウジング駆動機構11,21によるハウジングHの向きの変更量に基づいて、ミラー駆動機構14,24にミラー本体13、23の鏡面の向きを変更させるので、ハウジングHが駆動してもミラー本体13,23の向きを一定に保つことができる。このように、車両状態パターンに応じてハウジングHの向きが変更されても、ミラー本体13、23の向きは変更されないので、運転者は違和感なく、ミラー本体13,23に映る車両周囲の状況を確認しながら運転操作をすることができる。
【0069】
本実施形態の車両用監視装置100は、車両の車速、シフトポジション、カメラ12,22のオン/オフ、及び車両の操舵角のうち一つ又は複数の情報を動作情報とするので、車両の状態を正確に判断することができる。つまり、これらの動作情報から、現在の車両の状況において駐車支援や走行時の周辺観察に適した映像が必要であるか、車両周囲の安全監視に適した映像が必要であるかを正確に判断することができる。
【0070】
本実施形態の車両用監視装置100は、エンジンがオフ状態である旨の動作情報を取得した場合には、カメラ12,22の撮像方向が、エンジンがオン状態である場合のカメラ12,22の撮像方向よりも上向きになるように、ドアミラー1,2のハウジングHの向きを変更させることにより、カメラ12,22の撮像方向(光軸)の向きを、エンジンがオン状態であるときの下向きに比べて、横向きに変化させることができる。各ドアミラー1、2に取り付けられたカメラ12,22の撮像方向を車体の横方向にすることで、ドアミラー1,2の高さから車体の周囲を撮像できるので、車両周囲に存在する高さのある物体の全体(不審者の全身)を撮像することができる。
また、ドアミラー1,2の高さから車体の周囲を撮像すると、不審者等を撮像領域の中央部分で捉えることができるので、カメラ12,22が広角である場合であっても、不審者の明瞭な画像を得ることができる。
【0071】
本実施形態の車両用監視装置100は、エンジンがオン状態であり、シフトポジションがリバースである旨の動作情報を取得した場合には、車両が駐車状態であると判断できるので、カメラ12,22の撮像方向が下向きになるように、ドアミラー1,2のハウジングHの向きを変更させることにより、駐車支援に適した映像を撮像することができる。
【0072】
本実施形態の車両用監視装置100は、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度以上である旨の動作情報を取得した場合には、車両が通常走行状態であると判断できるので、カメラ12,22の撮像方向が後側方になるように、ドアミラー1,2のハウジングHの向きを変更させることにより、走行支援に適した映像を撮像することができる。
【0073】
本実施形態の車両用監視装置100は、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度未満であるときに、カメラ12,22がオフ状態である旨の動作情報を取得した場合には、カメラ12,22の撮像方向が後側方になるようにドアミラー1,2のハウジングHの向きを変更させ、他方、カメラ12,22がオン状態である旨の動作情報を取得した場合には、カメラ12,22の撮像方向が下向きになるように、前記ドアミラーのハウジングの向きを変更させる。カメラ12,22がオン状態である場合には駐車支援のプログラムが実行されている可能性が高いと判断し、駐車支援に適した映像を撮像することができる。
【0074】
本実施形態の車両用監視装置100は、エンジンがオン状態であり、シフトポジションがリバース以外であり、車両の車速が所定速度未満であり、カメラ12.22がオフ状態である動作情報を取得し、車両状態パターンが走行支援モードであると判断されたた場合であっても、直前に判断された車両状態パターンが駐車支援モードである場合にはドアミラー1,2のハウジングHの向きの変更を実行しないので、駐車操作の途中でカメラ12,22の撮像方向が変更されることを防止することができる。
【0075】
本実施形態の車両用監視装置100は、エンジンがオン状態であり、シフトポジションがリバースである動作情報を取得し、車両状態パターンが駐車支援モードであると判断されたた場合に、車両の操舵角が所定値以上である旨の動作情報を取得した場合には、カメラ12,22の撮像方向が後側方になるように、ドアミラー1,2のハウジングHの向きを変更させ、車両の操舵角が所定値未満である旨の動作情報を取得した場合には、カメラ12,22の撮像方向が下向きになるように、ドアミラー1,2のハウジングHの向きを変更させるので、駐車操作のうち車両を大きく旋回させるときには後ろ方向の状態を確認できる映像を撮像し、車両を直進させる(縦列駐車させる)ときには下方向(路面方向)の状態を確認できる映像を撮像することができる。
【0076】
本実施形態の車両用監視装置100は、車両の操舵角が右方向への操舵である旨の動作情報を取得した場合には、車両の右側のドアミラー1のハウジングHの向きを変更させ、車両の操舵角が左方向への操舵である旨の動作情報を取得した場合には、車両の左側のドアミラー2のハウジングHの向きを変更させるので、確認を要する方向(左又は右)のドアミラー1,2のハウジングのみを駆動させることができる。
【0077】
本実施形態の車両用監視装置100は、カメラ12、22の映像から移動体を検出し、その移動体の存在方向又は移動方向に応じてドアミラーのハウジングHの向きを変更させるので、移動体を追跡した映像を取得することができる。
【0078】
本実施形態の車両用監視装置100は、遠隔監視モードの場合にはカメラ12、22により撮像された映像を外部端末装置800に送出するので、車両のオーナーは車両から離れた位置においても、自分の車両の状況を映像で確認することができる。
【0079】
なお、以上説明したすべての実施形態は、本発明の理解を容易にするために記載されたものであって、本発明を限定するために記載されたものではない。したがって、上記の実施形態に開示された各要素は、本発明の技術的範囲に属する全ての設計変更や均等物をも含む趣旨である。
【0080】
本明細書では、本発明に係る車両用監視装置の一態様として車両用監視装置100及び監視システム1000を例にして説明するが、本発明はこれに限定されるものではない。
【0081】
また、本明細書では、本発明に係る車両用監視装置の一態様として、カメラ12、22の向きを変更させるハウジング駆動機構11、21と、ミラー本体13,23の鏡面の向きを変更させるミラー駆動機構14、24を制御可能な、CPU11、ROM12、RAM13を含む制御装置10を備える車両用監視装置100を一例として説明するが、これに限定されるものではない。
【0082】
本明細書では、ハウジング駆動制御手段と、ミラー駆動制御手段と、移動体検出手段と、送信手段とを有する本発明に係る車両用監視装置の一態様として、ハウジング駆動制御機能と、ミラー駆動制御機能と、移動体検出機能と、送信機能を備える制御装置10を有する車両用監視装置100を説明するが、これに限定されるものではない。
【符号の説明】
【0083】
1000…監視システム
100…車両用監視装置
M…車両
10…制御装置
11…CPU
12…ROM
13…RAM
200…車両コントローラ
300…イグニッションスイッチ
400…車速センサ
500…ポジショニングスイッチ
600…操舵角センサ
700…通信装置
800…外部端末装置
900…通信回線
【特許請求の範囲】
【請求項1】
車両に取り付けられ、カメラとミラー本体とが取り付けられたハウジングを備えるドアミラーと、
前記ドアミラーのハウジングの向きを変更させるハウジング駆動機構と、
前記車両から取得した動作情報から判断された車両状態パターンに応じて、前記ハウジング駆動機構に前記ハウジングの向きを変更させるハウジング駆動制御手段と、を備え、
前記ハウジング駆動制御手段は、前記車両のエンジンがオン状態であるか又はオフ状態であるかの情報を含む動作情報を取得し、当該取得した動作情報から判断された車両状態パターンに応じて、前記ハウジング駆動機構に前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項2】
請求項1に記載の車両用監視装置において、
前記ミラー本体の鏡面の向きを変更させるミラー駆動機構と、
前記ハウジング駆動機構によるハウジングの向きの変更量に基づいて、前記ミラー駆動機構に前記ミラー本体の鏡面の向きを変更させるミラー駆動制御手段と、をさらに備えることを特徴とする車両用監視装置。
【請求項3】
請求項1又は2に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、前記車両の車速、前記シフトポジション、前記カメラのオン/オフ、及び前記車両の操舵角のうち一つ又は複数の動作情報に基づいて、前記ハウジング駆動機構に前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項4】
請求項1〜3の何れか一項に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、前記エンジンがオフ状態である旨の動作情報を取得した場合には、前記エンジンがオン状態である場合の当該カメラの撮像方向よりも前記カメラの撮像方向が上向きになるように、前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項5】
請求項4に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、前記エンジンがオン状態であり、シフトポジションがリバースである旨の動作情報を取得した場合には、前記カメラの撮像方向が下向きになるように、前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項6】
請求項4又は5に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、前記エンジンがオン状態であり、シフトポジションがリバース以外であり、前記車両の車速が所定速度以上である旨の動作情報を取得した場合には、前記カメラの撮像方向が後側方になるように、前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項7】
請求項4〜6の何れか一項に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、前記エンジンがオン状態であり、シフトポジションがリバース以外であり、前記車両の車速が所定速度未満であり、前記カメラがオフ状態である旨の動作情報を取得した場合には、前記カメラの撮像方向が後側方になるように前記ドアミラーのハウジングの向きを変更させ、
前記ハウジング駆動制御手段は、前記エンジンがオン状態であり、シフトポジションがリバース以外であり、前記車両の車速が所定速度未満であり、前記カメラがオン状態である旨の動作情報を取得した場合には、前記カメラの撮像方向が下向きになるように、前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項8】
請求項7に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、前記エンジンがオン状態であり、シフトポジションがリバース以外であり、前記車両の車速が所定速度未満であり、前記カメラがオフ状態である動作情報を取得した場合において、
前記動作情報を取得する直前に取得した動作情報が、前記エンジンがオン状態であり、シフトポジションがリバースである旨の動作情報である場合、又は前記エンジンがオン状態であり、シフトポジションがリバース以外であり、前記車両の車速が所定速度未満であり、前記カメラがオン状態である旨の動作情報である場合には、前記ドアミラーのハウジングの向きの変更を実行しないことを特徴とする車両用監視装置。
【請求項9】
請求項4〜8の何れか一項に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、
前記エンジンがオン状態であり、シフトポジションがリバースであり、前記車両の操舵角が所定値以上である旨の動作情報を取得した場合には、前記カメラの撮像方向が後側方になるように、前記ドアミラーのハウジングの向きを変更させ、
前記エンジンがオン状態であり、シフトポジションがリバースであり、前記車両の操舵角が所定値未満である旨の動作情報を取得した場合には、前記カメラの撮像方向が下向きになるように、前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項10】
請求項9に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、前記車両の操舵角が右方向への操舵である旨の動作情報を取得した場合には、前記車両の右側のドアミラーのハウジングの向きを変更させ、
前記車両の操舵角が左方向への操舵である旨の動作情報を取得した場合には、前記車両の左側のドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項11】
請求項1〜10の何れか一項に記載の車両用監視装置において、
前記カメラの撮像画像に基づいて前記車両周囲の移動体及びその移動方向を検出する移動体検出手段をさらに備え、
前記ハウジング駆動制御手段は、前記エンジンがオフ状態である旨の動作情報を取得した後に、前記移動体検出手段により移動体が検出された場合には、前記カメラの撮像方向が前記検出された移動体の存在方向又は当該移動体の移動方向に向くように、前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項12】
請求項1〜11の何れか一項に記載の車両用監視装置において、
外部の通信機能を備える端末装置との通信機能を備える送信手段を、さらに備え、
前記送信手段は、前記車両のエンジンがオフ状態である旨の動作情報を取得した場合には、前記カメラにより撮像された映像を前記車両の外部の端末装置に送信することを特徴とする車両用監視装置。
【請求項1】
車両に取り付けられ、カメラとミラー本体とが取り付けられたハウジングを備えるドアミラーと、
前記ドアミラーのハウジングの向きを変更させるハウジング駆動機構と、
前記車両から取得した動作情報から判断された車両状態パターンに応じて、前記ハウジング駆動機構に前記ハウジングの向きを変更させるハウジング駆動制御手段と、を備え、
前記ハウジング駆動制御手段は、前記車両のエンジンがオン状態であるか又はオフ状態であるかの情報を含む動作情報を取得し、当該取得した動作情報から判断された車両状態パターンに応じて、前記ハウジング駆動機構に前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項2】
請求項1に記載の車両用監視装置において、
前記ミラー本体の鏡面の向きを変更させるミラー駆動機構と、
前記ハウジング駆動機構によるハウジングの向きの変更量に基づいて、前記ミラー駆動機構に前記ミラー本体の鏡面の向きを変更させるミラー駆動制御手段と、をさらに備えることを特徴とする車両用監視装置。
【請求項3】
請求項1又は2に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、前記車両の車速、前記シフトポジション、前記カメラのオン/オフ、及び前記車両の操舵角のうち一つ又は複数の動作情報に基づいて、前記ハウジング駆動機構に前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項4】
請求項1〜3の何れか一項に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、前記エンジンがオフ状態である旨の動作情報を取得した場合には、前記エンジンがオン状態である場合の当該カメラの撮像方向よりも前記カメラの撮像方向が上向きになるように、前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項5】
請求項4に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、前記エンジンがオン状態であり、シフトポジションがリバースである旨の動作情報を取得した場合には、前記カメラの撮像方向が下向きになるように、前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項6】
請求項4又は5に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、前記エンジンがオン状態であり、シフトポジションがリバース以外であり、前記車両の車速が所定速度以上である旨の動作情報を取得した場合には、前記カメラの撮像方向が後側方になるように、前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項7】
請求項4〜6の何れか一項に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、前記エンジンがオン状態であり、シフトポジションがリバース以外であり、前記車両の車速が所定速度未満であり、前記カメラがオフ状態である旨の動作情報を取得した場合には、前記カメラの撮像方向が後側方になるように前記ドアミラーのハウジングの向きを変更させ、
前記ハウジング駆動制御手段は、前記エンジンがオン状態であり、シフトポジションがリバース以外であり、前記車両の車速が所定速度未満であり、前記カメラがオン状態である旨の動作情報を取得した場合には、前記カメラの撮像方向が下向きになるように、前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項8】
請求項7に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、前記エンジンがオン状態であり、シフトポジションがリバース以外であり、前記車両の車速が所定速度未満であり、前記カメラがオフ状態である動作情報を取得した場合において、
前記動作情報を取得する直前に取得した動作情報が、前記エンジンがオン状態であり、シフトポジションがリバースである旨の動作情報である場合、又は前記エンジンがオン状態であり、シフトポジションがリバース以外であり、前記車両の車速が所定速度未満であり、前記カメラがオン状態である旨の動作情報である場合には、前記ドアミラーのハウジングの向きの変更を実行しないことを特徴とする車両用監視装置。
【請求項9】
請求項4〜8の何れか一項に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、
前記エンジンがオン状態であり、シフトポジションがリバースであり、前記車両の操舵角が所定値以上である旨の動作情報を取得した場合には、前記カメラの撮像方向が後側方になるように、前記ドアミラーのハウジングの向きを変更させ、
前記エンジンがオン状態であり、シフトポジションがリバースであり、前記車両の操舵角が所定値未満である旨の動作情報を取得した場合には、前記カメラの撮像方向が下向きになるように、前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項10】
請求項9に記載の車両用監視装置において、
前記ハウジング駆動制御手段は、前記車両の操舵角が右方向への操舵である旨の動作情報を取得した場合には、前記車両の右側のドアミラーのハウジングの向きを変更させ、
前記車両の操舵角が左方向への操舵である旨の動作情報を取得した場合には、前記車両の左側のドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項11】
請求項1〜10の何れか一項に記載の車両用監視装置において、
前記カメラの撮像画像に基づいて前記車両周囲の移動体及びその移動方向を検出する移動体検出手段をさらに備え、
前記ハウジング駆動制御手段は、前記エンジンがオフ状態である旨の動作情報を取得した後に、前記移動体検出手段により移動体が検出された場合には、前記カメラの撮像方向が前記検出された移動体の存在方向又は当該移動体の移動方向に向くように、前記ドアミラーのハウジングの向きを変更させることを特徴とする車両用監視装置。
【請求項12】
請求項1〜11の何れか一項に記載の車両用監視装置において、
外部の通信機能を備える端末装置との通信機能を備える送信手段を、さらに備え、
前記送信手段は、前記車両のエンジンがオフ状態である旨の動作情報を取得した場合には、前記カメラにより撮像された映像を前記車両の外部の端末装置に送信することを特徴とする車両用監視装置。
【図1】

【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−1298(P2013−1298A)
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願番号】特願2011−135970(P2011−135970)
【出願日】平成23年6月20日(2011.6.20)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成25年1月7日(2013.1.7)
【国際特許分類】
【出願日】平成23年6月20日(2011.6.20)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]