
車両用経路探索装置
【課題】 出発地周辺や目的地周辺においてユーザに違和感が発生しない最適ルートを探索できる車両用経路探索装置を提供する。
【解決手段】 第1道路コスト係数を道路情報に応じて記憶する第1道路コスト係数記憶手段と、道路が出発地を含む所定の領域に含まれる場合に適用される第2道路コスト係数を道路情報に応じて記憶する第2道路コスト係数記憶手段と、同一ルートについて、第1道路コスト係数のみを使用した総ルートコストを計算する一方、出発地を含む所定の領域に含まれる道路については第2道路コスト係数を使用するとともにそれ以外の道路については第1道路コスト係数を使用する総ルートコストを計算する総ルートコスト計算手段と、計算された総ルートコストを用いて案内経路を探索する経路探索手段と、を有することを特徴とする車両用経路探索装置として提供可能である。
【解決手段】 第1道路コスト係数を道路情報に応じて記憶する第1道路コスト係数記憶手段と、道路が出発地を含む所定の領域に含まれる場合に適用される第2道路コスト係数を道路情報に応じて記憶する第2道路コスト係数記憶手段と、同一ルートについて、第1道路コスト係数のみを使用した総ルートコストを計算する一方、出発地を含む所定の領域に含まれる道路については第2道路コスト係数を使用するとともにそれ以外の道路については第1道路コスト係数を使用する総ルートコストを計算する総ルートコスト計算手段と、計算された総ルートコストを用いて案内経路を探索する経路探索手段と、を有することを特徴とする車両用経路探索装置として提供可能である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、出発地から目的地までの経路を探索する車両用経路探索装置に関するものである。
【背景技術】
【0002】
従来の車両用ナビゲーション装置においては、例えば、ユーザが目的地を設定すると、出発地(通常、車両現在位置)から目的地までの経路を探索し、探索した経路にしたがって案内を行っている。経路探索に際しては、探索条件(推奨ルート、有料道路優先ルート、一般道優先ルート、距離優先ルート等)、道路種別(高速、国道、県道、細街路等)、規制(右左折規制、一方通行等)、リンク距離等に応じた固定のコストパラメータを利用し、その結果として最小のコストとなる単一の経路をその探索条件における最適経路として算出し、出発地から目的地まで経路表示するようにしている。
【0003】
経路探索に固定のコストパラメータを用いて最小コストとなる経路を最適経路として探索するものにあっては、コストパラメータが固定されているため、老若男女を問わない平均的な経路、あるいは比較的大きな道路が探索されやすい傾向があった。しかしながら、ユーザの個性、性格、その他の付帯条件により通行したいルートとは異なる場合もあるため、平均的な経路、あるいは比較的大きな道路では万人にとって最適な経路とはいえない場合がある。
【0004】
そこで、出発地側、および目的地側からそれぞれ探索コストを順次加算し、各ノードまたは交差点に、その直前ノードまたは交差点と、順次加算して算出された探索コストを割り付けて記憶させ、出発地側から探索した探索結果と、目的地側から探索した探索結果が交わる複数のノードまたは交差点を抽出し、抽出された各ノードまたは交差点から出発地側、及び目的地側へ順次ノードまたは交差点をたどることにより複数のルートを算出するナビゲーション装置が考案されている(特許文献1参照)。
【0005】
【特許文献1】特開2002−202137号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
特許文献1のナビゲーション装置では、出発地から目的地までの経路探索を行なう場合、道路種別、道路幅、信号機の有無などの情報に基づきルートコストを算出し、ユーザの好みに対応するため高速道優先、最短距離、最短時間など探索条件を変えて複数のルートを提示していたが、ルートコストを優先すると出発地周辺や目的地周辺で遠回りのルートとなる場合があった。特に、出発地が自宅である場合、道路状況を熟知している自宅周辺で遠回りのルートが探索されると、ユーザは探索結果に違和感をもち、ひいては経路探索機能を使用しなくなることもありえ、折角のナビゲーション装置を有効活用しないという問題も起こり得る。
【0007】
上記問題を背景として、本発明の課題は、出発地周辺や目的地周辺においてユーザに違和感が発生しない最適ルートを探索できる車両用経路探索装置を提供することにある。
【課題を解決するための手段および発明の効果】
【0008】
本発明は、上記課題を解決するための車両用経路探索装置を提供するものである。すなわち、請求項1によれば、第1道路コスト係数を道路情報に応じて記憶する第1道路コスト係数記憶手段と、道路が出発地を含む所定の領域に含まれる場合に適用される第2道路コスト係数を道路情報に応じて記憶する第2道路コスト係数記憶手段と、同一ルートについて、第1道路コスト係数のみを使用した総ルートコストを計算する一方、出発地を含む所定の領域に含まれる道路については第2道路コスト係数を使用するとともにそれ以外の道路については第1道路コスト係数を使用する総ルートコストを計算する総ルートコスト計算手段と、計算された総ルートコストを用いて案内経路を探索する経路探索手段と、を有することを特徴とする車両用経路探索装置として構成される。
【0009】
上記構成によって、自宅周辺等の出発地周辺とそれ以外の場所で探索条件すなわち道路コスト係数を切り替えることにより、出発地周辺ではユーザのよく知っている経路が優先して探索され、従来のような主要道路主体の遠回りのルートは探索されず、違和感が発生しない最適ルートを探索することが可能となる。
【0010】
また、請求項2によれば、上記課題を解決するための車両用経路探索装置は、第1道路コスト係数を道路情報に応じて記憶する第1道路コスト係数記憶手段と、道路が目的地を含む所定の領域に含まれる場合に適用される第3道路コスト係数を道路情報に応じて記憶する第3道路コスト係数記憶手段と、同一ルートについて、第1道路コスト係数のみを使用した総ルートコストを計算する一方、目的地を含む所定の領域に含まれる道路については第3道路コスト係数を使用するとともにそれ以外の道路については第1道路コスト係数を使用する総ルートコストを計算する総ルートコスト計算手段と、計算された総ルートコストを用いて案内経路を探索する経路探索手段と、を有することを特徴とする車両用経路探索装置として構成される。
【0011】
上記構成によって、目的地周辺とそれ以外の場所で探索条件すなわち道路コスト係数を切り替えることにより、目的地周辺ではユーザのよく知っている経路あるいはユーザが事前に調査した最適経路と同じ経路が優先して探索され、従来のような主要道路主体の遠回りのルートは探索されず、違和感が発生しない最適ルートを探索することが可能となる。
【0012】
また、請求項3によれば、上記課題を解決するための車両用経路探索装置は、第1道路コスト係数を道路情報に応じて記憶する第1道路コスト係数記憶手段と、道路が出発地を含む所定の領域に含まれる場合に適用される第2道路コスト係数を道路情報に応じて記憶する第2道路コスト係数記憶手段と、道路が目的地を含む所定の領域に含まれる場合に適用される第3道路コスト係数を道路情報に応じて記憶する第3道路コスト係数記憶手段と、同一ルートについて、第1道路コスト係数のみを使用した総ルートコストを計算する一方、出発地を含む所定の領域に含まれる道路については第2道路コスト係数を使用し、かつ目的地を含む所定の領域に含まれる道路については第3道路コスト係数を使用するとともにそれ以外の道路については第1道路コスト係数を使用する総ルートコストを計算する総ルートコスト計算手段と、計算された総ルートコストを用いて案内経路を探索する経路探索手段と、を有することを特徴とする車両用経路探索装置として構成される。
【0013】
上記構成によって、自宅周辺等の出発地周辺および目的地周辺と、それ以外の場所で探索条件すなわち道路コスト係数を切り替えることにより、出発地周辺ではユーザのよく知っている経路が優先して探索され、また目的地周辺ではユーザのよく知っている経路あるいはユーザが事前に調査した最適経路と同じ経路が優先して探索され、従来のような主要道路主体の遠回りのルートは探索されず、さらに違和感が発生しない最適ルートを探索することが可能となる。
【0014】
請求項4によれば、本発明の車両用経路探索装置における道路情報は、少なくとも道路種別を含む構成をとることができる。
【0015】
高速道路,国道等の道路種別は高速道路を優先して経路探索を行なう場合等に用いられ、経路探索における重要な要素の一つである。他にも道路に関するパラメータはあるが、上記構成によって、道路情報に応じて第1道路コスト係数,第2道路コスト係数,および第3道路コスト係数をそれぞれ設定することが可能となる。また、道路情報に道路種別以外のパラメータが含まれても各道路コスト係数をそれぞれ設定することが可能である。
【0016】
請求項5によれば、本発明の車両用経路探索装置における総ルートコスト計算手段は、ルートを構成する各道路の道路長および道路種別と、第1道路コスト係数,第2道路コスト係数,および第3道路コスト係数とを用いて総ルートコストを計算する構成をとることができる。
【0017】
道路種別は例えば高速道路,国道,県道等に分類される。高速道路,国道,県道等は、道路の幅員や車線数は概ね各種別において一定と見なすことができる。また、道路長は案内経路の探索における基本的な要素である。そこで、所定の種別の道路の所定の区間の道路長に各道路コスト係数を乗じたものを、当該区間のルートコストとすることができる。上記構成によって、比較的簡易な方法で総ルートコストを計算することが可能となる。
【0018】
請求項6によれば、本発明の車両用経路探索装置における経路探索手段は、計算された総ルートコストが最小となるルートを案内経路とする構成をとることができる。
【0019】
上記構成によって、第2道路コスト係数を出発地周辺で遠回りしない道路は低くし、また第3道路コスト係数を目的地周辺で遠回りしない道路は低くすることで、閾値を設けることなく計算されたルートコストの大小判定のみで最適な案内経路を判定することが可能となる。
【発明を実施するための最良の形態】
【0020】
出発地周辺や目的地周辺においてユーザに違和感が発生しない最適ルートを探索できる車両用経路探索装置を提供するという目的を、出発地周辺あるいは目的地周辺を含む道路コスト係数と、出発地周辺および目的地周辺を含まない領域の道路コスト係数とを用いてルートコストを計算する構成により実現した。
【実施例】
【0021】
以下、本発明の実施の形態を、本発明の車両用経路探索装置を車載用ナビゲーション装置(以下、ナビゲーション装置と略称)に適用した例を用いて、図面を参照しながら説明する。なお、本発明の車両用経路探索装置の適用範囲を車載用ナビゲーション装置に限定するものではない。例えば、パーソナルコンピュータに位置検出器1(後述)やナビプログラム21p(後述)等の、本発明の車両用経路探索装置と同等の機能を含んで車両に搭載する構成としてもよい。
【0022】
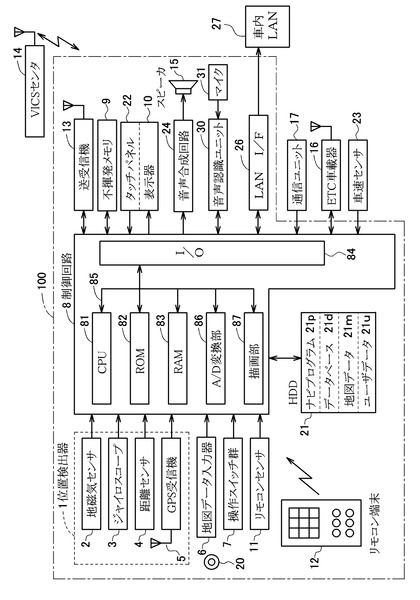
図1はナビゲーション装置100の構成を示すブロック図である。ナビゲーション装置100は、位置検出器1,地図データ入力器6,操作スイッチ群7,リモートコントロール(以下リモコンと称する)センサ11,音声案内などを行なう音声合成回路24およびスピーカ15,不揮発メモリ9,表示器10,ハードディスク装置(HDD)21,これらの接続された制御回路8,リモコン端末12を備えている。
【0023】
位置検出器1は、周知の地磁気センサ2,車両の回転角速度を検出するジャイロスコープ3,車両の走行距離を検出する距離センサ4,および衛星からの電波に基づいて車両の位置を検出するGPS受信機5を有している。これらのセンサ等2,3,4,5は各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお、精度によっては前述したうちの一部のセンサで構成してもよく、さらに、ステアリングの回転センサや各転動輪の車輪センサ例えば車速センサ23等を用いてもよい。
【0024】
操作スイッチ群7は、例えば表示器10と一体になったタッチパネル22もしくはメカニカルなスイッチが用いられる。タッチパネル22は、表示器10の画面上にガラス基盤と透明なフィルムにスペーサと呼ばれる隙間を介してX軸方向、Y軸方向に電気回路が配線され、フィルム上をユーザがタッチすると、押された部分の配線がショートして電圧値が変わるため、これを2次元座標値(X,Y)として検出する、いわゆる抵抗膜方式が広く用いられる。その他に、いわゆる静電容量方式を用いてもよい。メカニカルスイッチの他に、マウスやカーソル等のポインティングデバイスを用いてもよい。
【0025】
また、マイク31および音声認識ユニット30を用いて種々の指示を入力することも可能である。これは、マイク31から入力された音声信号を、音声認識ユニット30において周知の隠れマルコフモデル等の音声認識技術により処理を行ない、その結果に応じた操作コマンドに変換するものである。これら操作スイッチ群7、リモコン端末12、マイク31によって、種々の指示を入力することが可能である。
【0026】
送受信機13は、例えば道路に沿って設けられた送信機(図示せず)から出力される光ビーコン、または電波ビーコンによってVICS(Vehicle Information and Communication System:道路交通情報通信システム)センタ14から道路交通情報を受信、あるいはFM多重放送を受信するための装置である。
【0027】
また、ETC(Electronic Toll Collection:自動料金収受システム)車載器16と通信することにより、ETC車載器16がETC路上器(図示せず)から受信した料金情報などをナビゲーション装置100に取り込むことができる。また、ETC車載器16によって外部ネットワークと接続し、VICSセンタ14等との通信を行なう構成をとってもよい。
【0028】
通信ユニット17は、図示しない自動車電話機あるいは携帯電話機が接続されて、外部ネットワークを経由して図示しない情報センタとの通信を行なう。
【0029】
本発明の総ルートコスト計算手段,経路探索手段である制御回路8は通常のコンピュータとして構成されており、周知のCPU81,ROM82,RAM83,入出力回路であるI/O84およびこれらの構成を接続するバスライン85が備えられている。CPU81は、HDD21に記憶されたナビプログラム21pおよびデータにより制御を行なう。また、HDD21へのデータの読み書きの制御はCPU81によって行なわれる。A/D変換部86は周知のA/D(アナログ/デジタル)変換回路を含み、例えば位置検出器1などから制御回路8に入力されるアナログデータをCPU81で演算可能なデジタルデータに変換するものである。ROM82に、HDD21が故障した場合にナビゲーション機能のうちで必要最低限の動作を行なうためのプログラムを記憶しておいてもよい。
【0030】
描画部87は、HDD21等に記憶された表示用のデータや表示色のデータから表示器10に表示させるための表示画面データを生成する。
【0031】
本発明の第1道路コスト係数記憶手段,第2道路コスト係数記憶手段,第3道路コスト係数記憶手段でもあるHDD21には、ナビプログラム21pの他に位置検出の精度向上のためのいわゆるマップマッチング用データ、道路の接続を表した道路データを含む地図データ21mが記憶される。地図データ21mは、表示用となる所定の地図画像情報を記憶するとともに、リンク情報やノード情報等を含む道路網情報を記憶する。リンク情報は、各道路を構成する所定の区間情報であって、位置座標、距離、所要時間、道幅、車線数、制限速度等から構成される。また、ノード情報は、交差点(分岐路)等を規定する情報であって、位置座標、右左折車線数、接続先道路リンク等から構成される。また、リンク間接続情報には、通行の可不可を示すデータなどが設定されている。
【0032】
また、HDD21には経路案内の補助情報や娯楽情報、その他にユーザが独自にデータを書き込むことができ、ユーザデータ21uとして記憶される。これらのユーザデータ21uは、操作スイッチ群7,タッチパネル22およびリモコン端末12の操作あるいはマイク31からの音声入力によって内容の書き換えが可能である。また、ナビゲーション装置100の動作に必要なデータや各種情報をデータベース21dとして記憶してもよい。
【0033】
また、ナビプログラム,地図データ21mおよびユーザデータ21uは、地図データ入力器6を介して記憶媒体20からそのデータの追加・更新を行なうことが可能である。記憶媒体20は、そのデータ量からCD−ROMやDVDを用いるのが一般的であるが、例えばメモリカード等の他の媒体を用いてもよい。また、外部ネットワークを介してデータをダウンロードする構成を用いてもよい。
【0034】
不揮発メモリ9はEEPROM(Electrically Erasable & Programmable Read Only Memory:電気的消去・プログラム可能・読出し専用メモリ)やフラッシュメモリ等の書き換え可能な半導体メモリによって構成され、ナビゲーション装置100の動作に必要な情報およびデータが記憶されている。なお、不揮発メモリ9は、車両のアクセサリスイッチがオフ状態すなわち、ナビゲーション装置100がオフ状態になっても、記憶内容が保持されるようになっている。また、不揮発メモリ9の代わりにナビゲーション装置100の動作に必要な情報およびデータをHDD21に記憶してもよい。さらに、ナビゲーション装置100の動作に必要な情報およびデータを不揮発メモリ9とHDD21に分けて記憶してもよい。
【0035】
表示器10は周知のカラー液晶表示器で構成され、ドット・マトリックスLCD(Liquid Crystal Display)およびLCD表示制御を行なうための図示しないドライバ回路を含んで構成されている。ドライバ回路は、例えば、画素毎にトランジスタを付けて目的の画素を確実に点灯させたり消したりすることができるアクティブマトリックス駆動方式が用いられ、制御回路8から送られる表示指令および表示画面データに基づいて表示を行なう。また、表示器10として有機EL(ElectroLuminescence:電界発光)表示器,プラズマ表示器を用いてもよい。
【0036】
スピーカ15は周知の音声合成回路24に接続され、ナビプログラム21pの指令によって不揮発メモリ9あるいはHDD21に記憶されるデジタル音声データを音声合成回路24においてアナログ音声に変換したものが送出される。なお、音声合成の方法には、音声波形をそのままあるいは符号化して蓄積しておき、必要に応じて繋ぎあわせる録音編集方式などがある。
【0037】
車速センサ23は周知のロータリエンコーダ等の回転検出部を含み、例えば車輪取り付け部付近に設置されて車輪の回転を検出してパルス信号として制御回路8に送るものである。制御回路8では、その車輪の回転数を車両の速度に換算して、車両の現在位置から所定の場所までの予想到達時間を算出したり、車両の走行区間毎の平均車速を算出する。
【0038】
LAN(Local Area Network) I/F26は車内LAN27を介して他の車載機器やセンサとのデータの遣り取りを行なうためのインターフェース回路である。また、LAN I/F26を介して車速センサ23からのデータ取り込み、あるいはETC車載器16との接続を行なってもよい。
【0039】
このような構成を持つことにより、ナビゲーション装置100は、制御回路8のCPU81によりナビプログラム21pが起動されると、ユーザが操作スイッチ群7,タッチパネル22、リモコン端末12の操作あるいはマイク31からの音声入力によって、表示器10上に表示されるメニューから目的地経路を表示器10に表示させるための経路案内処理を選択した場合、次のような処理を実施する。
【0040】
すなわち、ユーザが地図上の任意の地点あるいは施設検索や住所検索、ユーザが設定した登録地などから地点を選択して目的地として設定すると、位置検出器1により車両の現在位置が求められ、該現在位置を出発地として目的地までの最適な案内経路を求める処理が行われる。そして、表示器10上の道路地図に案内経路を重ねて表示し、ユーザに適切な経路を案内する。このような自動的に最適な案内経路を設定する手法は、ダイクストラ法等の手法が知られている。また、表示器10およびスピーカ15の少なくとも一方によって、操作時のガイダンスや動作状態に応じたメッセージの報知を行なう。
【0041】
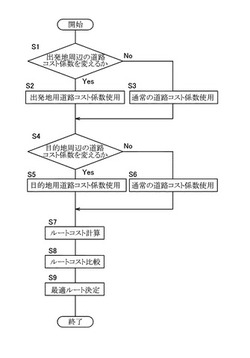
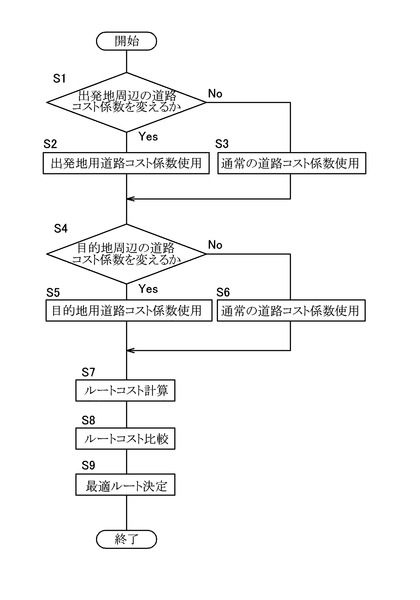
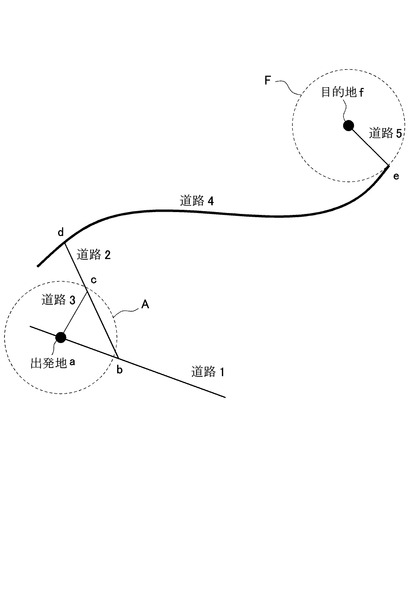
図2のフロー図および図3から図7を用いて、本発明における経路探索処理について説明する。なお、本処理はナビプログラム21pに含まれ、ナビプログラム21pの他のプログラムとともに繰り返し実行される。まず、上述の方法で目的地を設定する。目的地が設定されると、図3の出発地aを中心とする所定の半径の円で示される出発地周辺領域Aの道路コスト係数を変更するかを調べ、変更する場合(S1:Yes)はコスト係数を本発明の第2道路コスト係数である出発地用道路コスト係数に変更し(S2)、変更しない場合(S1:No)は本発明の第1道路コスト係数である通常の道路コスト係数を使用する(S3)。
【0042】
同様に、図3の目的地fを中心とする所定の半径の円で示される目的地周辺領域Fの道路コスト係数を変更するかを調べ、変更する場合(S4:Yes)は道路コスト係数を本発明の第3道路コスト係数である目的地用道路コスト係数に変更し(S5)、変更しない場合(S4:No)は通常の道路コスト係数を使用する(S6)。
【0043】
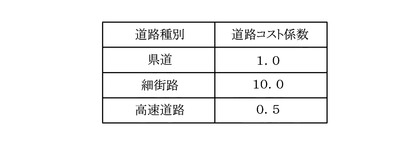
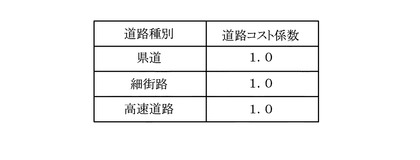
各道路コスト係数はHDD21のデータベース21dあるいは不揮発メモリ9に領域が確保される道路コスト係数記憶領域に記憶される。図4は通常の道路コスト係数,図5は出発地用道路コスト係数および目的地用道路コスト係数の一例である。道路コスト係数は道路種別毎に定義されている。また、出発地用道路コスト係数と目的地用道路コスト係数を別個に定義してもよい。
【0044】
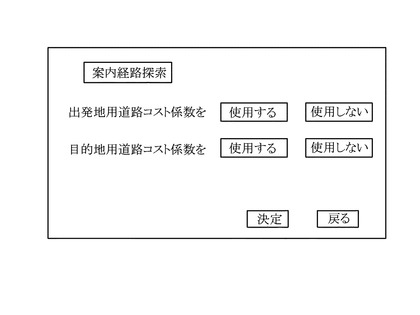
出発地用道路コスト係数および目的地用道路コスト係数を用いるかどうかは、ユーザが設定可能である。ユーザが操作スイッチ群7,タッチパネル22、リモコン端末12の操作あるいはマイク31からの音声入力によって、表示器10上に表示されるメニューから、図7のような出発地用道路コスト係数あるいは目的地用道路コスト係数を用いるかどうかを選択する画面を表示させ、その画面上でユーザが選択入力を行なう。設定内容はHDD21(ユーザデータ21u,データベース21d等)あるいは不揮発メモリ9に領域が確保されるユーザ設定内容記憶領域に記憶される。
【0045】
また、経路探索の度毎に出発地用道路コスト係数および目的地用道路コスト係数を用いるかをユーザに問い合わせるようにしてもよい。この場合は、目的地の設定が行なわれると(図2の例ではステップS1が実行される前の段階)、図7のような画面が表示され、ユーザは出発地用道路コスト係数あるいは目的地用道路コスト係数を用いるかどうかを選択する。そして選択された結果に基づいてルートコスト計算が行なわれる。
【0046】
出発地周辺領域Aあるいは目的地周辺領域Fの形状は、上述の例では円形状であるが、現在地aあるいは目的地fを中心する多角形としてもよい。また、出発地周辺領域Aと目的地周辺領域Fの形状が同一あるいは領域が同面積である必要はない。また、地図データ21mから得られる地形データ,道路データからそれぞれの領域の形状を決定してもよい。例えば、円形状の目的地周辺領域Fに河川が含まれ、その河川は目的地fの西方にあり北から南に流れ、ユーザ(車両)は目的地fの東方から目的地fへ向かうとき、目的地周辺領域Fにおいて当該河川を渡るための橋が全くない場合は、目的地周辺領域Fにおける当該河川よりも西側の領域を目的地周辺領域Fに含めないようにしてもよい。
【0047】
使用する道路コスト係数が決定されたら、出発地aと目的地fの経路においてルートコスト計算を行なう(S7)。ルートコストは、道路長に道路コスト係数を乗じたものの総和である。
【0048】
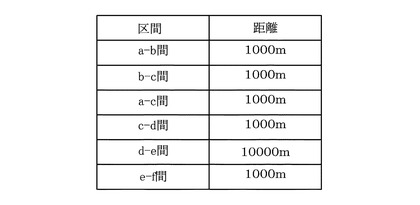
図3の例では、道路1,道路2,道路5が県道、道路3が細街路、道路4が高速道路である。また、出発地a,地点b,地点c,地点d,地点e,目的地fの各区間の距離は図6のようになっている。各区間の距離はリンク情報として地図データ21mに含まれているものを使用する。別途、ユーザデータ21uやデータベース21dに専用の記憶領域を確保してデータを格納してもよい。そして、出発地aから目的地fまでの間の探索経路は以下の2つのルートである。
・ルート1:a−b−c−d−e−f
・ルート2:a−c−d−e−f
【0049】
上記2つのルートについて通常の道路コスト係数を使用した場合のルートコストは以下のようになる。
・ルート1:1000m×1.0+1000m×1.0+1000m×1.0+10000m×0.5+1000m×1.0=9000m
・ルート2:1000m×10.0+1000m×1.0+10000m×0.5+1000m×1.0=17000m
【0050】
一方、2つのルートについて出発地用道路コスト係数を使用した場合のルートコストは以下のようになる。
・ルート1:1000m×1.0+1000m×1.0+1000m×1.0+10000m×1.0+1000m×1.0=14000m
・ルート2:1000m×1.0+1000m×1.0+10000m×1.0+1000m×1.0=13000m
【0051】
そして、計算されたルートコストを比較して(S8)、ルートコストの最も小さいものを最適ルートとして決定する(S9)。通常の道路コスト係数を使用した場合は運転しにくいと思われる細街路を含まないルート1が最適ルートとなるが、出発地用道路コスト係数を使用した場合はルート2が最適ルートとなる。ルート2には細街路(道路3)が含まれているが、自宅周辺等のようにユーザがよく知っている道路であれば、走行に支障はない。また、表示器10には出発地(例えば現在位置)と目的地を含む地図上に最適ルートが表示される。
【0052】
上記の例では目的地周辺領域Fには通常の道路コスト係数が1.0の道路5(県道)のみしかなかったため、目的地用道路コスト係数が使用されなかったが、目的地周辺領域Fに道路が複数あれば目的地用道路コスト係数を使用できる。さらに、出発地周辺領域Aと目的地周辺領域Fとの間の中間経路にも中間経路用コスト係数を定義してルートコスト計算を行なってもよい。
【0053】
例えば、出発地Aと目的地Fとの間にユーザが道路をよく知っている地点がある場合に、予めその地点を登録しておくようにしてもよい。登録方法は出発地用道路コスト係数および目的地用道路コスト係数を用いるかどうかの設定方法と同様で、図7の登録画面に「中間経路用コスト係数を用いる」という項目が追加され、「用いる」,「用いない」の他に「登録する」というボタンが表示される。「登録する」ボタンを押下して、上述の目的地を設定するのと同様の方法で地点を設定し、設定内容はHDD21あるいは不揮発メモリ9の所定の領域に記憶される。
【0054】
そして、ルートコスト計算にユーザが登録した地点が探索経路のいずれかに含まれる場合、ユーザに例えば図7の画面表示に「中間経路用コスト係数を使用する」かの選択肢を追加したり、あるいは音声ガイダンスにより中間経路用コスト係数を用いるかどうかを問い合わせ、ユーザの指示に応じたルートコスト計算を行なう。
【0055】
また、出発地用道路コスト係数,中間経路用コスト係数,目的地用道路コスト係数は、少なくとも一つあるいは二つ以上の組み合わせで使用してもよい。また、出発地用道路コスト係数,目的地用道路コスト係数を用いた地点をデータベース21d等に記憶し、以降の経路探索時には、これら記憶された地点が案内経路に含まれる場合には、該地点を含む所定の範囲において中間経路用コスト係数を用いてもよい。
【0056】
なお、本実施例では発明の内容を強調するために道路長と道路種別のみを用いたルートコストの算出について説明したが、通常のナビゲーション装置(100)においては車線数,道路幅,有料道路料金など他のリンク情報やノード情報等も使用してルートコストが算出されるので、車線数,道路幅,有料道路料金などに応じた道路コスト係数を設定してルートコスト計算に用いてもよい。例えば、基準車線数を2車線として、車線数が1車線増える毎に0.1を出発地用道路コスト係数,目的地用道路コスト係数から差し引き(最小値は0.1)、車線数が1車線減る毎に0.1を出発地用道路コスト係数,目的地用道路コスト係数に加える。
【0057】
以上、本発明の実施の形態を説明したが、これらはあくまで例示にすぎず、本発明はこれらに限定されるものではなく、特許請求の範囲の趣旨を逸脱しない限りにおいて、当業者の知識に基づく種々の変更が可能である。
【図面の簡単な説明】
【0058】
【図1】車載用ナビゲーション装置の構成を示すブロック図。
【図2】経路探索処理を説明するためのフロー図。
【図3】経路探索処理を説明するための道路図。
【図4】通常の道路コスト係数を示す図。
【図5】出発地用および目的地用の道路種別毎の道路コスト係数を示す図。
【図6】道路図の区間距離を示す図。
【図7】出発地用および目的地用の道路コスト係数の設定時あるいは選択時の表示画面の一例を示す図。
【符号の説明】
【0059】
1 位置検出器
8 制御回路(総ルートコスト計算手段,経路探索手段)
21 ハードディスク装置(第1道路コスト係数記憶手段,第2道路コスト係数記憶手段,第3道路コスト係数記憶手段)
100 車載用ナビゲーション装置
【技術分野】
【0001】
本発明は、出発地から目的地までの経路を探索する車両用経路探索装置に関するものである。
【背景技術】
【0002】
従来の車両用ナビゲーション装置においては、例えば、ユーザが目的地を設定すると、出発地(通常、車両現在位置)から目的地までの経路を探索し、探索した経路にしたがって案内を行っている。経路探索に際しては、探索条件(推奨ルート、有料道路優先ルート、一般道優先ルート、距離優先ルート等)、道路種別(高速、国道、県道、細街路等)、規制(右左折規制、一方通行等)、リンク距離等に応じた固定のコストパラメータを利用し、その結果として最小のコストとなる単一の経路をその探索条件における最適経路として算出し、出発地から目的地まで経路表示するようにしている。
【0003】
経路探索に固定のコストパラメータを用いて最小コストとなる経路を最適経路として探索するものにあっては、コストパラメータが固定されているため、老若男女を問わない平均的な経路、あるいは比較的大きな道路が探索されやすい傾向があった。しかしながら、ユーザの個性、性格、その他の付帯条件により通行したいルートとは異なる場合もあるため、平均的な経路、あるいは比較的大きな道路では万人にとって最適な経路とはいえない場合がある。
【0004】
そこで、出発地側、および目的地側からそれぞれ探索コストを順次加算し、各ノードまたは交差点に、その直前ノードまたは交差点と、順次加算して算出された探索コストを割り付けて記憶させ、出発地側から探索した探索結果と、目的地側から探索した探索結果が交わる複数のノードまたは交差点を抽出し、抽出された各ノードまたは交差点から出発地側、及び目的地側へ順次ノードまたは交差点をたどることにより複数のルートを算出するナビゲーション装置が考案されている(特許文献1参照)。
【0005】
【特許文献1】特開2002−202137号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
特許文献1のナビゲーション装置では、出発地から目的地までの経路探索を行なう場合、道路種別、道路幅、信号機の有無などの情報に基づきルートコストを算出し、ユーザの好みに対応するため高速道優先、最短距離、最短時間など探索条件を変えて複数のルートを提示していたが、ルートコストを優先すると出発地周辺や目的地周辺で遠回りのルートとなる場合があった。特に、出発地が自宅である場合、道路状況を熟知している自宅周辺で遠回りのルートが探索されると、ユーザは探索結果に違和感をもち、ひいては経路探索機能を使用しなくなることもありえ、折角のナビゲーション装置を有効活用しないという問題も起こり得る。
【0007】
上記問題を背景として、本発明の課題は、出発地周辺や目的地周辺においてユーザに違和感が発生しない最適ルートを探索できる車両用経路探索装置を提供することにある。
【課題を解決するための手段および発明の効果】
【0008】
本発明は、上記課題を解決するための車両用経路探索装置を提供するものである。すなわち、請求項1によれば、第1道路コスト係数を道路情報に応じて記憶する第1道路コスト係数記憶手段と、道路が出発地を含む所定の領域に含まれる場合に適用される第2道路コスト係数を道路情報に応じて記憶する第2道路コスト係数記憶手段と、同一ルートについて、第1道路コスト係数のみを使用した総ルートコストを計算する一方、出発地を含む所定の領域に含まれる道路については第2道路コスト係数を使用するとともにそれ以外の道路については第1道路コスト係数を使用する総ルートコストを計算する総ルートコスト計算手段と、計算された総ルートコストを用いて案内経路を探索する経路探索手段と、を有することを特徴とする車両用経路探索装置として構成される。
【0009】
上記構成によって、自宅周辺等の出発地周辺とそれ以外の場所で探索条件すなわち道路コスト係数を切り替えることにより、出発地周辺ではユーザのよく知っている経路が優先して探索され、従来のような主要道路主体の遠回りのルートは探索されず、違和感が発生しない最適ルートを探索することが可能となる。
【0010】
また、請求項2によれば、上記課題を解決するための車両用経路探索装置は、第1道路コスト係数を道路情報に応じて記憶する第1道路コスト係数記憶手段と、道路が目的地を含む所定の領域に含まれる場合に適用される第3道路コスト係数を道路情報に応じて記憶する第3道路コスト係数記憶手段と、同一ルートについて、第1道路コスト係数のみを使用した総ルートコストを計算する一方、目的地を含む所定の領域に含まれる道路については第3道路コスト係数を使用するとともにそれ以外の道路については第1道路コスト係数を使用する総ルートコストを計算する総ルートコスト計算手段と、計算された総ルートコストを用いて案内経路を探索する経路探索手段と、を有することを特徴とする車両用経路探索装置として構成される。
【0011】
上記構成によって、目的地周辺とそれ以外の場所で探索条件すなわち道路コスト係数を切り替えることにより、目的地周辺ではユーザのよく知っている経路あるいはユーザが事前に調査した最適経路と同じ経路が優先して探索され、従来のような主要道路主体の遠回りのルートは探索されず、違和感が発生しない最適ルートを探索することが可能となる。
【0012】
また、請求項3によれば、上記課題を解決するための車両用経路探索装置は、第1道路コスト係数を道路情報に応じて記憶する第1道路コスト係数記憶手段と、道路が出発地を含む所定の領域に含まれる場合に適用される第2道路コスト係数を道路情報に応じて記憶する第2道路コスト係数記憶手段と、道路が目的地を含む所定の領域に含まれる場合に適用される第3道路コスト係数を道路情報に応じて記憶する第3道路コスト係数記憶手段と、同一ルートについて、第1道路コスト係数のみを使用した総ルートコストを計算する一方、出発地を含む所定の領域に含まれる道路については第2道路コスト係数を使用し、かつ目的地を含む所定の領域に含まれる道路については第3道路コスト係数を使用するとともにそれ以外の道路については第1道路コスト係数を使用する総ルートコストを計算する総ルートコスト計算手段と、計算された総ルートコストを用いて案内経路を探索する経路探索手段と、を有することを特徴とする車両用経路探索装置として構成される。
【0013】
上記構成によって、自宅周辺等の出発地周辺および目的地周辺と、それ以外の場所で探索条件すなわち道路コスト係数を切り替えることにより、出発地周辺ではユーザのよく知っている経路が優先して探索され、また目的地周辺ではユーザのよく知っている経路あるいはユーザが事前に調査した最適経路と同じ経路が優先して探索され、従来のような主要道路主体の遠回りのルートは探索されず、さらに違和感が発生しない最適ルートを探索することが可能となる。
【0014】
請求項4によれば、本発明の車両用経路探索装置における道路情報は、少なくとも道路種別を含む構成をとることができる。
【0015】
高速道路,国道等の道路種別は高速道路を優先して経路探索を行なう場合等に用いられ、経路探索における重要な要素の一つである。他にも道路に関するパラメータはあるが、上記構成によって、道路情報に応じて第1道路コスト係数,第2道路コスト係数,および第3道路コスト係数をそれぞれ設定することが可能となる。また、道路情報に道路種別以外のパラメータが含まれても各道路コスト係数をそれぞれ設定することが可能である。
【0016】
請求項5によれば、本発明の車両用経路探索装置における総ルートコスト計算手段は、ルートを構成する各道路の道路長および道路種別と、第1道路コスト係数,第2道路コスト係数,および第3道路コスト係数とを用いて総ルートコストを計算する構成をとることができる。
【0017】
道路種別は例えば高速道路,国道,県道等に分類される。高速道路,国道,県道等は、道路の幅員や車線数は概ね各種別において一定と見なすことができる。また、道路長は案内経路の探索における基本的な要素である。そこで、所定の種別の道路の所定の区間の道路長に各道路コスト係数を乗じたものを、当該区間のルートコストとすることができる。上記構成によって、比較的簡易な方法で総ルートコストを計算することが可能となる。
【0018】
請求項6によれば、本発明の車両用経路探索装置における経路探索手段は、計算された総ルートコストが最小となるルートを案内経路とする構成をとることができる。
【0019】
上記構成によって、第2道路コスト係数を出発地周辺で遠回りしない道路は低くし、また第3道路コスト係数を目的地周辺で遠回りしない道路は低くすることで、閾値を設けることなく計算されたルートコストの大小判定のみで最適な案内経路を判定することが可能となる。
【発明を実施するための最良の形態】
【0020】
出発地周辺や目的地周辺においてユーザに違和感が発生しない最適ルートを探索できる車両用経路探索装置を提供するという目的を、出発地周辺あるいは目的地周辺を含む道路コスト係数と、出発地周辺および目的地周辺を含まない領域の道路コスト係数とを用いてルートコストを計算する構成により実現した。
【実施例】
【0021】
以下、本発明の実施の形態を、本発明の車両用経路探索装置を車載用ナビゲーション装置(以下、ナビゲーション装置と略称)に適用した例を用いて、図面を参照しながら説明する。なお、本発明の車両用経路探索装置の適用範囲を車載用ナビゲーション装置に限定するものではない。例えば、パーソナルコンピュータに位置検出器1(後述)やナビプログラム21p(後述)等の、本発明の車両用経路探索装置と同等の機能を含んで車両に搭載する構成としてもよい。
【0022】
図1はナビゲーション装置100の構成を示すブロック図である。ナビゲーション装置100は、位置検出器1,地図データ入力器6,操作スイッチ群7,リモートコントロール(以下リモコンと称する)センサ11,音声案内などを行なう音声合成回路24およびスピーカ15,不揮発メモリ9,表示器10,ハードディスク装置(HDD)21,これらの接続された制御回路8,リモコン端末12を備えている。
【0023】
位置検出器1は、周知の地磁気センサ2,車両の回転角速度を検出するジャイロスコープ3,車両の走行距離を検出する距離センサ4,および衛星からの電波に基づいて車両の位置を検出するGPS受信機5を有している。これらのセンサ等2,3,4,5は各々が性質の異なる誤差を持っているため、複数のセンサにより各々補完しながら使用するように構成されている。なお、精度によっては前述したうちの一部のセンサで構成してもよく、さらに、ステアリングの回転センサや各転動輪の車輪センサ例えば車速センサ23等を用いてもよい。
【0024】
操作スイッチ群7は、例えば表示器10と一体になったタッチパネル22もしくはメカニカルなスイッチが用いられる。タッチパネル22は、表示器10の画面上にガラス基盤と透明なフィルムにスペーサと呼ばれる隙間を介してX軸方向、Y軸方向に電気回路が配線され、フィルム上をユーザがタッチすると、押された部分の配線がショートして電圧値が変わるため、これを2次元座標値(X,Y)として検出する、いわゆる抵抗膜方式が広く用いられる。その他に、いわゆる静電容量方式を用いてもよい。メカニカルスイッチの他に、マウスやカーソル等のポインティングデバイスを用いてもよい。
【0025】
また、マイク31および音声認識ユニット30を用いて種々の指示を入力することも可能である。これは、マイク31から入力された音声信号を、音声認識ユニット30において周知の隠れマルコフモデル等の音声認識技術により処理を行ない、その結果に応じた操作コマンドに変換するものである。これら操作スイッチ群7、リモコン端末12、マイク31によって、種々の指示を入力することが可能である。
【0026】
送受信機13は、例えば道路に沿って設けられた送信機(図示せず)から出力される光ビーコン、または電波ビーコンによってVICS(Vehicle Information and Communication System:道路交通情報通信システム)センタ14から道路交通情報を受信、あるいはFM多重放送を受信するための装置である。
【0027】
また、ETC(Electronic Toll Collection:自動料金収受システム)車載器16と通信することにより、ETC車載器16がETC路上器(図示せず)から受信した料金情報などをナビゲーション装置100に取り込むことができる。また、ETC車載器16によって外部ネットワークと接続し、VICSセンタ14等との通信を行なう構成をとってもよい。
【0028】
通信ユニット17は、図示しない自動車電話機あるいは携帯電話機が接続されて、外部ネットワークを経由して図示しない情報センタとの通信を行なう。
【0029】
本発明の総ルートコスト計算手段,経路探索手段である制御回路8は通常のコンピュータとして構成されており、周知のCPU81,ROM82,RAM83,入出力回路であるI/O84およびこれらの構成を接続するバスライン85が備えられている。CPU81は、HDD21に記憶されたナビプログラム21pおよびデータにより制御を行なう。また、HDD21へのデータの読み書きの制御はCPU81によって行なわれる。A/D変換部86は周知のA/D(アナログ/デジタル)変換回路を含み、例えば位置検出器1などから制御回路8に入力されるアナログデータをCPU81で演算可能なデジタルデータに変換するものである。ROM82に、HDD21が故障した場合にナビゲーション機能のうちで必要最低限の動作を行なうためのプログラムを記憶しておいてもよい。
【0030】
描画部87は、HDD21等に記憶された表示用のデータや表示色のデータから表示器10に表示させるための表示画面データを生成する。
【0031】
本発明の第1道路コスト係数記憶手段,第2道路コスト係数記憶手段,第3道路コスト係数記憶手段でもあるHDD21には、ナビプログラム21pの他に位置検出の精度向上のためのいわゆるマップマッチング用データ、道路の接続を表した道路データを含む地図データ21mが記憶される。地図データ21mは、表示用となる所定の地図画像情報を記憶するとともに、リンク情報やノード情報等を含む道路網情報を記憶する。リンク情報は、各道路を構成する所定の区間情報であって、位置座標、距離、所要時間、道幅、車線数、制限速度等から構成される。また、ノード情報は、交差点(分岐路)等を規定する情報であって、位置座標、右左折車線数、接続先道路リンク等から構成される。また、リンク間接続情報には、通行の可不可を示すデータなどが設定されている。
【0032】
また、HDD21には経路案内の補助情報や娯楽情報、その他にユーザが独自にデータを書き込むことができ、ユーザデータ21uとして記憶される。これらのユーザデータ21uは、操作スイッチ群7,タッチパネル22およびリモコン端末12の操作あるいはマイク31からの音声入力によって内容の書き換えが可能である。また、ナビゲーション装置100の動作に必要なデータや各種情報をデータベース21dとして記憶してもよい。
【0033】
また、ナビプログラム,地図データ21mおよびユーザデータ21uは、地図データ入力器6を介して記憶媒体20からそのデータの追加・更新を行なうことが可能である。記憶媒体20は、そのデータ量からCD−ROMやDVDを用いるのが一般的であるが、例えばメモリカード等の他の媒体を用いてもよい。また、外部ネットワークを介してデータをダウンロードする構成を用いてもよい。
【0034】
不揮発メモリ9はEEPROM(Electrically Erasable & Programmable Read Only Memory:電気的消去・プログラム可能・読出し専用メモリ)やフラッシュメモリ等の書き換え可能な半導体メモリによって構成され、ナビゲーション装置100の動作に必要な情報およびデータが記憶されている。なお、不揮発メモリ9は、車両のアクセサリスイッチがオフ状態すなわち、ナビゲーション装置100がオフ状態になっても、記憶内容が保持されるようになっている。また、不揮発メモリ9の代わりにナビゲーション装置100の動作に必要な情報およびデータをHDD21に記憶してもよい。さらに、ナビゲーション装置100の動作に必要な情報およびデータを不揮発メモリ9とHDD21に分けて記憶してもよい。
【0035】
表示器10は周知のカラー液晶表示器で構成され、ドット・マトリックスLCD(Liquid Crystal Display)およびLCD表示制御を行なうための図示しないドライバ回路を含んで構成されている。ドライバ回路は、例えば、画素毎にトランジスタを付けて目的の画素を確実に点灯させたり消したりすることができるアクティブマトリックス駆動方式が用いられ、制御回路8から送られる表示指令および表示画面データに基づいて表示を行なう。また、表示器10として有機EL(ElectroLuminescence:電界発光)表示器,プラズマ表示器を用いてもよい。
【0036】
スピーカ15は周知の音声合成回路24に接続され、ナビプログラム21pの指令によって不揮発メモリ9あるいはHDD21に記憶されるデジタル音声データを音声合成回路24においてアナログ音声に変換したものが送出される。なお、音声合成の方法には、音声波形をそのままあるいは符号化して蓄積しておき、必要に応じて繋ぎあわせる録音編集方式などがある。
【0037】
車速センサ23は周知のロータリエンコーダ等の回転検出部を含み、例えば車輪取り付け部付近に設置されて車輪の回転を検出してパルス信号として制御回路8に送るものである。制御回路8では、その車輪の回転数を車両の速度に換算して、車両の現在位置から所定の場所までの予想到達時間を算出したり、車両の走行区間毎の平均車速を算出する。
【0038】
LAN(Local Area Network) I/F26は車内LAN27を介して他の車載機器やセンサとのデータの遣り取りを行なうためのインターフェース回路である。また、LAN I/F26を介して車速センサ23からのデータ取り込み、あるいはETC車載器16との接続を行なってもよい。
【0039】
このような構成を持つことにより、ナビゲーション装置100は、制御回路8のCPU81によりナビプログラム21pが起動されると、ユーザが操作スイッチ群7,タッチパネル22、リモコン端末12の操作あるいはマイク31からの音声入力によって、表示器10上に表示されるメニューから目的地経路を表示器10に表示させるための経路案内処理を選択した場合、次のような処理を実施する。
【0040】
すなわち、ユーザが地図上の任意の地点あるいは施設検索や住所検索、ユーザが設定した登録地などから地点を選択して目的地として設定すると、位置検出器1により車両の現在位置が求められ、該現在位置を出発地として目的地までの最適な案内経路を求める処理が行われる。そして、表示器10上の道路地図に案内経路を重ねて表示し、ユーザに適切な経路を案内する。このような自動的に最適な案内経路を設定する手法は、ダイクストラ法等の手法が知られている。また、表示器10およびスピーカ15の少なくとも一方によって、操作時のガイダンスや動作状態に応じたメッセージの報知を行なう。
【0041】
図2のフロー図および図3から図7を用いて、本発明における経路探索処理について説明する。なお、本処理はナビプログラム21pに含まれ、ナビプログラム21pの他のプログラムとともに繰り返し実行される。まず、上述の方法で目的地を設定する。目的地が設定されると、図3の出発地aを中心とする所定の半径の円で示される出発地周辺領域Aの道路コスト係数を変更するかを調べ、変更する場合(S1:Yes)はコスト係数を本発明の第2道路コスト係数である出発地用道路コスト係数に変更し(S2)、変更しない場合(S1:No)は本発明の第1道路コスト係数である通常の道路コスト係数を使用する(S3)。
【0042】
同様に、図3の目的地fを中心とする所定の半径の円で示される目的地周辺領域Fの道路コスト係数を変更するかを調べ、変更する場合(S4:Yes)は道路コスト係数を本発明の第3道路コスト係数である目的地用道路コスト係数に変更し(S5)、変更しない場合(S4:No)は通常の道路コスト係数を使用する(S6)。
【0043】
各道路コスト係数はHDD21のデータベース21dあるいは不揮発メモリ9に領域が確保される道路コスト係数記憶領域に記憶される。図4は通常の道路コスト係数,図5は出発地用道路コスト係数および目的地用道路コスト係数の一例である。道路コスト係数は道路種別毎に定義されている。また、出発地用道路コスト係数と目的地用道路コスト係数を別個に定義してもよい。
【0044】
出発地用道路コスト係数および目的地用道路コスト係数を用いるかどうかは、ユーザが設定可能である。ユーザが操作スイッチ群7,タッチパネル22、リモコン端末12の操作あるいはマイク31からの音声入力によって、表示器10上に表示されるメニューから、図7のような出発地用道路コスト係数あるいは目的地用道路コスト係数を用いるかどうかを選択する画面を表示させ、その画面上でユーザが選択入力を行なう。設定内容はHDD21(ユーザデータ21u,データベース21d等)あるいは不揮発メモリ9に領域が確保されるユーザ設定内容記憶領域に記憶される。
【0045】
また、経路探索の度毎に出発地用道路コスト係数および目的地用道路コスト係数を用いるかをユーザに問い合わせるようにしてもよい。この場合は、目的地の設定が行なわれると(図2の例ではステップS1が実行される前の段階)、図7のような画面が表示され、ユーザは出発地用道路コスト係数あるいは目的地用道路コスト係数を用いるかどうかを選択する。そして選択された結果に基づいてルートコスト計算が行なわれる。
【0046】
出発地周辺領域Aあるいは目的地周辺領域Fの形状は、上述の例では円形状であるが、現在地aあるいは目的地fを中心する多角形としてもよい。また、出発地周辺領域Aと目的地周辺領域Fの形状が同一あるいは領域が同面積である必要はない。また、地図データ21mから得られる地形データ,道路データからそれぞれの領域の形状を決定してもよい。例えば、円形状の目的地周辺領域Fに河川が含まれ、その河川は目的地fの西方にあり北から南に流れ、ユーザ(車両)は目的地fの東方から目的地fへ向かうとき、目的地周辺領域Fにおいて当該河川を渡るための橋が全くない場合は、目的地周辺領域Fにおける当該河川よりも西側の領域を目的地周辺領域Fに含めないようにしてもよい。
【0047】
使用する道路コスト係数が決定されたら、出発地aと目的地fの経路においてルートコスト計算を行なう(S7)。ルートコストは、道路長に道路コスト係数を乗じたものの総和である。
【0048】
図3の例では、道路1,道路2,道路5が県道、道路3が細街路、道路4が高速道路である。また、出発地a,地点b,地点c,地点d,地点e,目的地fの各区間の距離は図6のようになっている。各区間の距離はリンク情報として地図データ21mに含まれているものを使用する。別途、ユーザデータ21uやデータベース21dに専用の記憶領域を確保してデータを格納してもよい。そして、出発地aから目的地fまでの間の探索経路は以下の2つのルートである。
・ルート1:a−b−c−d−e−f
・ルート2:a−c−d−e−f
【0049】
上記2つのルートについて通常の道路コスト係数を使用した場合のルートコストは以下のようになる。
・ルート1:1000m×1.0+1000m×1.0+1000m×1.0+10000m×0.5+1000m×1.0=9000m
・ルート2:1000m×10.0+1000m×1.0+10000m×0.5+1000m×1.0=17000m
【0050】
一方、2つのルートについて出発地用道路コスト係数を使用した場合のルートコストは以下のようになる。
・ルート1:1000m×1.0+1000m×1.0+1000m×1.0+10000m×1.0+1000m×1.0=14000m
・ルート2:1000m×1.0+1000m×1.0+10000m×1.0+1000m×1.0=13000m
【0051】
そして、計算されたルートコストを比較して(S8)、ルートコストの最も小さいものを最適ルートとして決定する(S9)。通常の道路コスト係数を使用した場合は運転しにくいと思われる細街路を含まないルート1が最適ルートとなるが、出発地用道路コスト係数を使用した場合はルート2が最適ルートとなる。ルート2には細街路(道路3)が含まれているが、自宅周辺等のようにユーザがよく知っている道路であれば、走行に支障はない。また、表示器10には出発地(例えば現在位置)と目的地を含む地図上に最適ルートが表示される。
【0052】
上記の例では目的地周辺領域Fには通常の道路コスト係数が1.0の道路5(県道)のみしかなかったため、目的地用道路コスト係数が使用されなかったが、目的地周辺領域Fに道路が複数あれば目的地用道路コスト係数を使用できる。さらに、出発地周辺領域Aと目的地周辺領域Fとの間の中間経路にも中間経路用コスト係数を定義してルートコスト計算を行なってもよい。
【0053】
例えば、出発地Aと目的地Fとの間にユーザが道路をよく知っている地点がある場合に、予めその地点を登録しておくようにしてもよい。登録方法は出発地用道路コスト係数および目的地用道路コスト係数を用いるかどうかの設定方法と同様で、図7の登録画面に「中間経路用コスト係数を用いる」という項目が追加され、「用いる」,「用いない」の他に「登録する」というボタンが表示される。「登録する」ボタンを押下して、上述の目的地を設定するのと同様の方法で地点を設定し、設定内容はHDD21あるいは不揮発メモリ9の所定の領域に記憶される。
【0054】
そして、ルートコスト計算にユーザが登録した地点が探索経路のいずれかに含まれる場合、ユーザに例えば図7の画面表示に「中間経路用コスト係数を使用する」かの選択肢を追加したり、あるいは音声ガイダンスにより中間経路用コスト係数を用いるかどうかを問い合わせ、ユーザの指示に応じたルートコスト計算を行なう。
【0055】
また、出発地用道路コスト係数,中間経路用コスト係数,目的地用道路コスト係数は、少なくとも一つあるいは二つ以上の組み合わせで使用してもよい。また、出発地用道路コスト係数,目的地用道路コスト係数を用いた地点をデータベース21d等に記憶し、以降の経路探索時には、これら記憶された地点が案内経路に含まれる場合には、該地点を含む所定の範囲において中間経路用コスト係数を用いてもよい。
【0056】
なお、本実施例では発明の内容を強調するために道路長と道路種別のみを用いたルートコストの算出について説明したが、通常のナビゲーション装置(100)においては車線数,道路幅,有料道路料金など他のリンク情報やノード情報等も使用してルートコストが算出されるので、車線数,道路幅,有料道路料金などに応じた道路コスト係数を設定してルートコスト計算に用いてもよい。例えば、基準車線数を2車線として、車線数が1車線増える毎に0.1を出発地用道路コスト係数,目的地用道路コスト係数から差し引き(最小値は0.1)、車線数が1車線減る毎に0.1を出発地用道路コスト係数,目的地用道路コスト係数に加える。
【0057】
以上、本発明の実施の形態を説明したが、これらはあくまで例示にすぎず、本発明はこれらに限定されるものではなく、特許請求の範囲の趣旨を逸脱しない限りにおいて、当業者の知識に基づく種々の変更が可能である。
【図面の簡単な説明】
【0058】
【図1】車載用ナビゲーション装置の構成を示すブロック図。
【図2】経路探索処理を説明するためのフロー図。
【図3】経路探索処理を説明するための道路図。
【図4】通常の道路コスト係数を示す図。
【図5】出発地用および目的地用の道路種別毎の道路コスト係数を示す図。
【図6】道路図の区間距離を示す図。
【図7】出発地用および目的地用の道路コスト係数の設定時あるいは選択時の表示画面の一例を示す図。
【符号の説明】
【0059】
1 位置検出器
8 制御回路(総ルートコスト計算手段,経路探索手段)
21 ハードディスク装置(第1道路コスト係数記憶手段,第2道路コスト係数記憶手段,第3道路コスト係数記憶手段)
100 車載用ナビゲーション装置
【特許請求の範囲】
【請求項1】
第1道路コスト係数を道路情報に応じて記憶する第1道路コスト係数記憶手段と、
道路が出発地を含む所定の領域に含まれる場合に適用される第2道路コスト係数を前記道路情報に応じて記憶する第2道路コスト係数記憶手段と、
同一ルートについて、前記第1道路コスト係数のみを使用した総ルートコストを計算する一方、前記出発地を含む所定の領域に含まれる道路については前記第2道路コスト係数を使用するとともにそれ以外の道路については前記第1道路コスト係数を使用する総ルートコストを計算する総ルートコスト計算手段と、
前記計算された総ルートコストを用いて案内経路を探索する経路探索手段と、
を有することを特徴とする車両用経路探索装置。
【請求項2】
第1道路コスト係数を道路情報に応じて記憶する第1道路コスト係数記憶手段と、
道路が目的地を含む所定の領域に含まれる場合に適用される第3道路コスト係数を前記道路情報に応じて記憶する第3道路コスト係数記憶手段と、
同一ルートについて、前記第1道路コスト係数のみを使用した総ルートコストを計算する一方、前記目的地を含む所定の領域に含まれる道路については前記第3道路コスト係数を使用するとともにそれ以外の道路については前記第1道路コスト係数を使用する総ルートコストを計算する総ルートコスト計算手段と、
前記計算された総ルートコストを用いて案内経路を探索する経路探索手段と、
を有することを特徴とする車両用経路探索装置。
【請求項3】
第1道路コスト係数を道路情報に応じて記憶する第1道路コスト係数記憶手段と、
道路が出発地を含む所定の領域に含まれる場合に適用される第2道路コスト係数を前記道路情報に応じて記憶する第2道路コスト係数記憶手段と、
道路が目的地を含む所定の領域に含まれる場合に適用される第3道路コスト係数を前記道路情報に応じて記憶する第3道路コスト係数記憶手段と、
同一ルートについて、前記第1道路コスト係数のみを使用した総ルートコストを計算する一方、前記出発地を含む所定の領域に含まれる道路については前記第2道路コスト係数を使用し、かつ前記目的地を含む所定の領域に含まれる道路については前記第3道路コスト係数を使用するとともにそれ以外の道路については前記第1道路コスト係数を使用する総ルートコストを計算する総ルートコスト計算手段と、
前記計算された総ルートコストを用いて案内経路を探索する経路探索手段と、
を有することを特徴とする車両用経路探索装置。
【請求項4】
前記道路情報は少なくとも道路種別を含む請求項1ないし3のいずれか1項に記載の車両用経路探索装置。
【請求項5】
前記総ルートコスト計算手段は、ルートを構成する各道路の道路長および前記道路種別と、前記第1道路コスト係数,前記第2道路コスト係数,および前記第3道路コスト係数とを用いて前記総ルートコストを計算する請求項4に記載の車両用経路探索装置。
【請求項6】
前記経路探索手段は、前記計算された総ルートコストが最小となるルートを案内経路とする請求項1ないし5のいずれか1項に記載の車両用経路探索装置。
【請求項1】
第1道路コスト係数を道路情報に応じて記憶する第1道路コスト係数記憶手段と、
道路が出発地を含む所定の領域に含まれる場合に適用される第2道路コスト係数を前記道路情報に応じて記憶する第2道路コスト係数記憶手段と、
同一ルートについて、前記第1道路コスト係数のみを使用した総ルートコストを計算する一方、前記出発地を含む所定の領域に含まれる道路については前記第2道路コスト係数を使用するとともにそれ以外の道路については前記第1道路コスト係数を使用する総ルートコストを計算する総ルートコスト計算手段と、
前記計算された総ルートコストを用いて案内経路を探索する経路探索手段と、
を有することを特徴とする車両用経路探索装置。
【請求項2】
第1道路コスト係数を道路情報に応じて記憶する第1道路コスト係数記憶手段と、
道路が目的地を含む所定の領域に含まれる場合に適用される第3道路コスト係数を前記道路情報に応じて記憶する第3道路コスト係数記憶手段と、
同一ルートについて、前記第1道路コスト係数のみを使用した総ルートコストを計算する一方、前記目的地を含む所定の領域に含まれる道路については前記第3道路コスト係数を使用するとともにそれ以外の道路については前記第1道路コスト係数を使用する総ルートコストを計算する総ルートコスト計算手段と、
前記計算された総ルートコストを用いて案内経路を探索する経路探索手段と、
を有することを特徴とする車両用経路探索装置。
【請求項3】
第1道路コスト係数を道路情報に応じて記憶する第1道路コスト係数記憶手段と、
道路が出発地を含む所定の領域に含まれる場合に適用される第2道路コスト係数を前記道路情報に応じて記憶する第2道路コスト係数記憶手段と、
道路が目的地を含む所定の領域に含まれる場合に適用される第3道路コスト係数を前記道路情報に応じて記憶する第3道路コスト係数記憶手段と、
同一ルートについて、前記第1道路コスト係数のみを使用した総ルートコストを計算する一方、前記出発地を含む所定の領域に含まれる道路については前記第2道路コスト係数を使用し、かつ前記目的地を含む所定の領域に含まれる道路については前記第3道路コスト係数を使用するとともにそれ以外の道路については前記第1道路コスト係数を使用する総ルートコストを計算する総ルートコスト計算手段と、
前記計算された総ルートコストを用いて案内経路を探索する経路探索手段と、
を有することを特徴とする車両用経路探索装置。
【請求項4】
前記道路情報は少なくとも道路種別を含む請求項1ないし3のいずれか1項に記載の車両用経路探索装置。
【請求項5】
前記総ルートコスト計算手段は、ルートを構成する各道路の道路長および前記道路種別と、前記第1道路コスト係数,前記第2道路コスト係数,および前記第3道路コスト係数とを用いて前記総ルートコストを計算する請求項4に記載の車両用経路探索装置。
【請求項6】
前記経路探索手段は、前記計算された総ルートコストが最小となるルートを案内経路とする請求項1ないし5のいずれか1項に記載の車両用経路探索装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2007−113940(P2007−113940A)
【公開日】平成19年5月10日(2007.5.10)
【国際特許分類】
【出願番号】特願2005−302924(P2005−302924)
【出願日】平成17年10月18日(2005.10.18)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成19年5月10日(2007.5.10)
【国際特許分類】
【出願日】平成17年10月18日(2005.10.18)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]