
車両用経路案内装置

【課題】目的地への到達時間が無闇に延びる恐れがない適切な経路案内を実施すること。
【解決手段】制御装置2は、出発地から目的地までの案内経路に基づいた案内動作の実行期間中には、自車両が走行中の車線を、前方カメラ19による撮影画像の解析並びに地図データを利用して認識すると共に、案内経路に沿った前方交差点に、右左折や直進などの進路規制があるか否かを、地図データやVICS受信機10の受信情報などに基づいて検出する。また、制御装置2は、経路案内の実施時において、自車両の運転者が意図する走行車線変更行動がターンシグナルスイッチ12を通じて検出された場合に、当該変更行動が、検出済みの進路規制車線または当該進路規制車線に続く車線への車線変更であり、且つその車線変更後の進路規制に従って車両を走行させたときに案内経路を逸脱する場合には、自車両の運転者向けの警報信号をスピーカ8aから発生する。
【解決手段】制御装置2は、出発地から目的地までの案内経路に基づいた案内動作の実行期間中には、自車両が走行中の車線を、前方カメラ19による撮影画像の解析並びに地図データを利用して認識すると共に、案内経路に沿った前方交差点に、右左折や直進などの進路規制があるか否かを、地図データやVICS受信機10の受信情報などに基づいて検出する。また、制御装置2は、経路案内の実施時において、自車両の運転者が意図する走行車線変更行動がターンシグナルスイッチ12を通じて検出された場合に、当該変更行動が、検出済みの進路規制車線または当該進路規制車線に続く車線への車線変更であり、且つその車線変更後の進路規制に従って車両を走行させたときに案内経路を逸脱する場合には、自車両の運転者向けの警報信号をスピーカ8aから発生する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、地図データに基づいて出発地から目的地までの案内経路を算出し、その案内経路に基づいて車両進行方向に係る案内動作を行う機能を備えた車両用経路案内装置に関する。
【背景技術】
【0002】
出発地(現在位置或いはユーザによる設定位置)から目的地までの案内経路を地図画面上で表示するようにした車両用経路案内装置を利用する場合、車両を上記案内経路に沿って走行させることができない状態(例えば、直進すべきところを右折或いは左折のみが許容された車線へ誤って進入した状態、この逆に右折或いは左折すべきところを直進のみが許容された車線へ誤って進入した状態など)が発生する可能性が多々ある。このような状況に陥った場合、従来の車両用経路案内装置では、車両が未だ案内経路上を走行しているため、案内経路の再探索が行われず、例えば右折できないにもかかわらず右折の案内、つまり交通違反に繋がる案内が行われることになり、運転者に不快感を与える恐れがある。従来では、このような状況に対処するため、例えば特許文献1に見られるように、路側のビーコンから受信したデータに基づいて次の交差点に車線変更禁止区域が存在することを検出した場合に、案内経路以外の新経路を探索してメモリに予め記憶しておき、当該交差点に差し掛かった自車両の走行車線が誤ったものであった場合には、その走行車線に対応した新経路をメモリから読み出して地図画面上に表示することが行われている。
【特許文献1】特開平8−110236号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
特許文献1に記載された手段では、車両が誤って不適正な車線へ進入したとしても、それに即した新たな案内経路が表示されるから、その案内経路に沿った走行が交通違反に繋がる事態を防止可能になる。しかしながら、この手段では、本来走行すべきルートから逸脱した経路案内が行われるため遠回りになるケースが多くなり、結果的に、目的地に到達するまでの所要時間が無闇に延びてしまう、という問題点が出てくる。
【0004】
この場合、一般的な車両運転者にあっては、走行中の車線が渋滞している場合には隣接した車線へ移動するという運転操作を行い勝ちであり、これが上記のような誤った車線変更の原因になるという背景がある。従って、誤った車線変更が行われようとしている場合に、車両運転者に対する警告動作を行うようにすれば、前記問題点が発生することを未然に防止可能になると考えられる。また、このような警告動作とは逆に、例えば、走行中の車線のみが渋滞している場合に、案内経路の変更がない範囲で隣接する車線(渋滞していない車線)への移動を推奨する報知動作を行うようにすれば、目的地に到達するまでの所要時間の短縮が可能になると共に、車両運転者にとって不案内な道路でも安心して車線変更を行い得るようになる、と考えられる。
【0005】
本発明は、上記事情に鑑みてなされたものであり、その目的は、目的地への到達時間が無闇に延びる恐れがない適切な経路案内を実施可能となる車両用経路案内装置を提供することにある。
【課題を解決するための手段】
【0006】
請求項1記載の手段によれば、経路探索手段により算出された案内経路に基づいた案内動作が行われている期間中においては、制御手段が、自車両が走行中の車線を走行車線認識手段の出力に基づいて認識すると共に、その認識状態で、自車両の運転者が意図する走行車線変更行動が運転者意図検出手段により検出された場合に、当該変更行動が規制状態検出手段により検出された進路規制車線または当該進路規制車線に続く車線への車線変更であり、且つその車線変更後の進路規制に従って車両を走行させたときに前記案内経路を逸脱する場合には、自車両の運転者に向けて警報信号を発生するようになる。つまり、車両運転者が、案内経路の逸脱原因となる誤った車線変更を実施しようとした場合には、当該運転者に対して、その車線変更を思い止まらせるような警報信号が発せられることになるから、誤った車線変更を未然に防止できるようになる。この結果、目的地に到達するまでの所要時間が従来のように無闇に延びてしまう恐れがない適切な経路案内を実施可能になる。
【0007】
請求項2記載の手段によれば、経路探索手段により算出された案内経路に基づいた案内動作が行われている期間中においては、制御手段が、走行車線認識手段により認識される自車両の走行車線並びにその隣車線の渋滞状況を前記渋滞検出手段の検出出力に基づいて判断し、自車両の走行車線が渋滞し且つ隣車線が渋滞していない場合には、その隣車線の進路規制状態を規制状態検出手段の検出出力に基づいて判断し、当該隣車線への車線変更後の進路規制に従って自車両を走行させたときに前記案内経路を逸脱しない場合に、自車両の運転者に向けて隣車線への車線変更を推奨する報知動作を行うようになる。つまり、自車両が走行中の車線のみが渋滞しているような状況下では、案内経路の変更がない範囲で隣接する車線(渋滞していない車線)への移動が推奨されることになる。この結果、目的地に到達するまでの所要時間を短縮できる適切な経路案内を実施可能になるものであり、これと同時に、車両運転者にとって不案内な道路でも安心して車線変更を行い得るようになる、という効果も得られるようになる。
【0008】
請求項3記載の手段によれば、進路規制がある車線の検出を、車載カメラによる撮影画像を利用して行うことができるから、前記制御手段にあっては、そのような進路規制がある車線に係る情報を提供するインフラが整備されていない場所、或いは当該情報を提供する地図データが不十分な場所などにおいても、前記警報信号を発生する制御或いは前記報知動作を実行する制御が可能になる。
【0009】
請求項4及び5記載の手段によれば、規制状態検出手段において過去に検出された情報、つまり進路規制が存在する車線についての情報が記憶手段に蓄積されることになるから、前記制御手段にあっては、そのような情報を規制状態検出手段から取得できないような状態(例えば情報提供元のインフラとの通信障害が発生した状態、車載カメラにより自車両の前方の景色を鮮明に撮影できない状態など)となった場合でも、記憶手段に記憶された情報を利用して、前記警報信号を発生する制御或いは前記報知動作を実行する制御を確実に行い得るようになる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の一実施例について図面を参照しながら説明する。
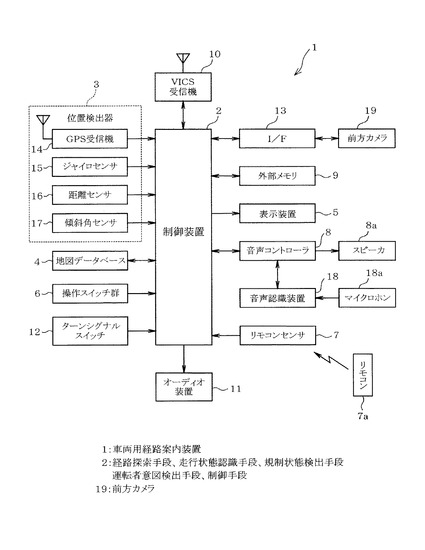
図1には、車両に搭載されたカーナビゲーション装置1(車両用経路案内装置に相当)及びこれに関連した部分の電気的構成が機能ブロックの組み合わせにより概略的に示されている。この図1において、カーナビゲーション装置1は、そのナビゲーション動作を制御する機能を有した制御装置2(経路探索手段、走行車線認識手段、規制状態検出手段、運転者意図検出手段、制御手段に相当)に対して、位置検出器3、地図データベース4、表示装置5、操作スイッチ群6、リモコンセンサ7、音声コントローラ8、外部メモリ9、VICS受信機10、オーディオ装置11、ターンシグナルスイッチ12、カメラインタフェース13などを接続して構成されている。
【0011】
制御装置2は、CPU、ROM、RAM、I/Oインタフェース及びこれらを接続するバスラインなど(何れも図示せず)を備えたマイクロコンピュータにより構成されている。これらのうち、ROMには、カーナビゲーション用のプログラムなどが格納され、RAMにはプログラム実行時の処理データの他に地図データベース4から取得した道路地図データ、VICS受信機10が受信した道路交通情報、カメラインタフェース13を通じて与えられる画像データなどが一時的に格納される。
【0012】
位置検出器3は、例えば、GPS用人工衛星からの信号を受信するGPS受信機14、ヨーレートを検出するためのジャイロセンサ15、車両の走行距離を検出するための距離センサ16、車両のピッチング方向の傾斜角を検出するための傾斜角センサ17などを含んで構成されており、車両の現在位置情報を算出する部分である。
【0013】
地図データベース4は、CD−ROMやDVD−ROM或いはHDDなどのような大容量の情報記録媒体(不揮発性の半導体メモリでも実現可能)を利用して構成されたものであり、地図表示のための地図描画用データ、マップマッチングや経路探索、経路案内などの種々の処理に必要な道路データ(右左折や直進などの進路規制や車線変更規制がある車線に係る規制情報も含む)、交差点の詳細データから成る交差点データ、背景レイヤのための背景データ、地名などを表示するための地名データの他に、施設名称を例えば50音順に並べた施設名称データベース、電話番号と施設の対応を示す電話番号データベースなど、多様な地図データが記憶されている。
【0014】
表示装置5は、地図画面などを表示するための例えばカラー液晶ディスプレイを含んで構成されており、車両の運転席近傍に設置される。この表示装置5の画面には、通常時において縮尺を複数段階に変更可能な道路地図が表示されると共に、その表示に重ね合わせて、車両の現在位置及び進行方向を示すポインタが表示されるようになっている。また、周知のダイクストラ法を用いて行われる出発地から目的地までの経路計算結果に基づいた経路案内機能の実行時には、道路地図に重ね合わせた状態で進むべき案内経路(誘導経路)が表示されるようになっている。さらに、ユーザ(一般的には車両の運転者)による目的地などの検索及び入力のための各種のメニュー画面及び入力画面、並びに各種のメッセージ・インフォメーションやヘルプ画面なども表示されるようになっている。
【0015】
操作スイッチ群6は、表示装置5の周辺に配置されたメカニカルスイッチや当該表示装置5のディスプレイ上に形成されたタッチパネルスイッチなどから成り、その操作に応じて、カーナビゲーション装置1に係る各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整など)の実行を指示する種々の操作コマンドを発生して制御装置2に与える構成となっている。
【0016】
リモコンセンサ7は、リモコン7aからのリモコン信号、つまり、上述したカーナビゲーション装置1に係る各種機能の実行を指示するための種々の操作コマンドを含む信号を制御装置2に与えるために設けられている。
【0017】
音声コントローラ8は、音声合成回路及びアンプなどを含んで構成されたもので、音声認識装置18を制御すると共に、音声入力があった運転者などに対し、スピーカ8aを通じてトークバック出力制御(音声出力)する。また、制御装置2からの音声情報(経路案内のためのメッセージや画面操作に係るガイダンスなど)をスピーカ8aから出力すると共に、音声認識装置18による音声認識結果を制御装置2に与える処理を実行する。
【0018】
尚、音声認識装置18は、マイクロホン18aからの音声入力をデジタルデータに変換する音声抽出部、音声認識用の比較パターン候補辞書を含んで成る音声認識部などを備えたもので、ユーザが発した音声を認識した結果を音声コントローラ8経由で制御装置2に与える構成となっている。また、この音声認識装置18は、前記操作スイッチ群6による種々の操作コマンドに対応した音声コマンドを識別できる構成となっており、この音声コマンドによりカーナビゲーション装置1に係る前述の各種機能の実行を指示できるようになっている。
【0019】
外部メモリ9は、フラッシュメモリなどのデータ書き換え可能な不揮発性メモリやHDDなどにより構成されたもので、電源オフ時にも消去してはいけない特定データを記憶したり、頻繁に使用するデータを地図データベースからコピーして利用したりするなどの用途のために設けられている。尚、外部メモリ9は、リムーバブルメディアにより構成しても良い。
【0020】
VICS受信機10は、VICSセンサユニットやFM多重放送受信機(何れも図示せず)などを備えたもので、例えばVICSセンサユニットがVICS局から受信した光/電波ビーコンなどによる道路交通情報やFM多重放送受信機が受信したFM多重放送からの道路交通情報を制御装置2に与える構成となっている。
【0021】
オーディオ装置11は、音源ユニット、チューナ、アンプ、多チャンネルスピーカなどを含んで構成されたもので、音源ユニット或いはチューナからの音声信号を多チャンネルスピーカから再生出力する動作を制御装置2からの指令に応じて実行する。上記音源ユニットとしては、多連装CDチェンジャ、HDD、MDなどが設けられるものであるが、特に、前記地図データベース4がHDDにより構成されている場合、或いは前記外部メモリ9がHDDにより構成されている場合には、当該HDDを音源ユニットとして兼用可能である。また、前記スピーカ8aは、オーディオ装置の多チャンネルスピーカの1チャンネルを利用して構成することも可能である。
【0022】
ターンシグナルスイッチ12は、車両の右折準備操作及び左折準備操作或いはレーンチェンジ操作が行われたときにウインカランプの点滅動作を行わせる周知構成のものであり、右折準備操作或いは右方向へのレーンチェンジ操作が行われたときに右折信号を制御装置2に与え、左折準備操作或いは左方向へのレーンチェンジ操作が行われたときに左折信号を制御装置2に与える構成となっている。
【0023】
カメラインタフェース13は、制御装置2と、自車両の前方を撮影可能に設置された前方カメラ19(車載カメラに相当)との間での信号授受を行うためのもので、制御装置2から前方カメラ19へは、その撮影動作の開始及び停止を指令する信号が与えられ、前方カメラ19から制御装置2へは、当該カメラ19が撮影した画像(自車両の前方画像)データが与えられる。
【0024】
制御装置2は、操作スイッチ群6或いはリモコンセンサ7を通じて入力された操作コマンドや音声認識装置18から入力された音声コマンドに基づいて、周知の地図表示機能、地図データベース4から取得した地図データを用いて出発地から目的地までの案内経路を算出する経路探索機能、算出された案内経路に基づいて車両進行方向に係る案内動作を行う経路案内機能、電話番号検索機能、郵便番号検索機能、マップコード(登録商標)のような固有コードを利用した検索機能、50音検索機能、ジャンル別検索機能、最寄り施設検索機能、目的地登録機能、地点登録機能など、多種多様な支援機能に係る処理を実行するように構成されているが、本発明の要旨に直接的に関係した機能として、車線変更管理機能が設定されている。
【0025】
そこで、以下においては、この車線変更管理機能について図2に示すフローチャートを参照しながら説明する。
図2には、制御装置2による制御内容のうち、上記車線変更管理機能を実現するための処理を含む制御内容が概略的に示されている。この図2において、まず、経路案内フラグ(操作コマンドや音声コマンドにより経路案内が指令されている状態を示す)がセットされているか否かを判断し(ステップS1)、セットされていない状態では、カーナビゲーション機能に係る通常処理ルーチンS2を実行した後にステップS1へリターンする。
【0026】
これに対して経路案内フラグがセットされていた場合には、表示装置5に表示中の地図画面上に、前記経路探索機能により算出した案内経路の表示などを行う案内経路表示ルーチンS3、自車両が走行中の車線を認識するステップS4を順次実行する。このような車線認識は、例えば、前方カメラ19により撮影した自車両前方画像の解析データと、地図データベース4から取得した地図データ(特に、車線数を示すデータ)とを利用して行うことができる。
【0027】
次いで、案内経路に沿った前方交差点手前の車線に、右左折や直進などの進路規制があるか否かを判断する(ステップS5)。このような進路規制がある車線の検出は、地図データベース4から取得した地図データやVICS受信機10を通じて取得した道路情報などに基づいて行うことになる。また、進路規制がある車線を、上記地図データや道路情報などにより検出できない場合には、前方カメラ19により撮影した前方画像の解析に基づいて検出する構成となっている。
【0028】
案内経路に沿った前方交差点手前の車線に進路規制がある場合には、自車両の運転者が意図する走行車線変更行動があるか否かを判断する(ステップS6)。このような走行車線変更行動は、ターンシグナルスイッチ12からの右折信号或いは左折信号の入力の有無に基づいて判断することになる。
【0029】
尚、上記のような走行車線変更行動の有無の判断を、他の手段、例えば、車両運転者の視線方向及びステアリング操作状態の各検出出力を利用した手段により行うことも可能である。具体的には、車両運転者の視線方向を検知する視線検知システム(例えば、車両運転者の顔部に向けて赤外光を投光する投光手段、車両運転者の顔部での反射赤外光を映像信号に変換する撮影手段、その映像信号に基づいて二値化処理や特徴点抽出処理などを行うことによって車両運転者の顔部の画像を抽出する画像処理手段、抽出された画像に基づいて車両運転者の視線方向を検出する演算手段を組み合わせたシステム)と、ステアリングホイールの操作角度及び操作方向を検出する操作状態検出手段とを設け、運転者の視線が隣車線或いは当該隣車線側のアウタミラー(ドアミラー)方向に向いた状態が予め設定された時間以上継続し、この状態でステアリングホイールが隣車線方向へ所定角度以上操作されたことを検出したときに、走行車線変更行動があったと判断する、などの構成とすることができる。
【0030】
ステップS6において走行車線変更行動ありと判断したときには、その変更先の車線を走行した場合に前方交差点での進路規制により自車両が案内経路を逸脱するか否かを判断する(ステップS7)。つまり、走行車線変更行動による変更先の車線をそのまま走行したと仮定したときに、前方交差点での進路規制に従った運転に伴い案内経路を逸脱する、と想定される状態時にはステップS7で「YES」と判断されることになる。
【0031】
このようにステップS7で「YES」と判断されたときには、音声コントローラ8からスピーカ8aを通じて警報信号を発生し(ステップS8)、この後にステップS1へリターンする。また、ステップS7で「NO」と判断されたときには、警報信号発生ステップS8をジャンプしてステップS1へリターンする。尚、このときの警報信号は、車両運転者の注意を喚起するアラーム音でも良いが、走行車線変更行動を制止する内容のメッセージ(音声コントローラ8内の音声合成回路により生成した合成音)であっても良い。
【0032】
一方、前記ステップS6において走行車線変更行動なしと判断したときには、自車両の走行車線(特には自車両の前方)が渋滞中か否かを判断する(ステップS9)。このような渋滞状態の判断は、例えば、前方カメラ19により撮影した自車両前方画像を解析することによりリアルタイムに行うことができる。尚、渋滞の有無の判断に他の手段、例えば車載レーダの探索結果による判断手段、路側インフラからのデータ提供手段などを利用しても良い。
【0033】
自車両の走行車線が渋滞していないと判断したとき(ステップS9:NO)には、そのままステップS1へリターンするが、渋滞中であると判断したときには、当該走行車線の隣車線が渋滞中であるか否かを、前述同様の手段により判断する(ステップS10)。
隣車線が渋滞中であったときには、そのままステップS1へリターンするが、渋滞していなかったとき(ステップS10:NO)には、その隣車線を走行した場合に前方交差点での進路規制により自車両が案内経路を逸脱するか否かを判断する(ステップS11)。つまり、渋滞していないと判断した隣車線をそのまま走行したと仮定したときに、前方交差点での進路規制に従った運転に伴い案内経路を逸脱する、と想定される状態時にはステップS11で「YES」と判断されることになる。
【0034】
このようにステップS11で「YES」と判断されたときには、そのままステップS1へリターンするが、「NO」と判断されたとき、つまり、渋滞していないと判断した隣車線をそのまま走行しても支障がないと考えられるときには、音声コントローラ8からスピーカ8aを通じて車線変更推奨メッセージを発生し(ステップS12)、この後にステップS1へリターンする。尚、上記車線変更推奨メッセージは、音声コントローラ8内の音声合成回路により生成することになる。
【0035】
前記ステップS5で「NO」と判断した場合、つまり、案内経路に沿った前方交差点に進路規制がなかった場合には、自車両の走行車線(特には自車両の前方)が渋滞中か否かを前述同様の手段により判断する(ステップS13)。この場合、自車両の走行車線が渋滞していないと判断したとき(ステップS13:NO)には、そのままステップS1へリターンするが、渋滞中であると判断したときには、当該走行車線の隣車線が渋滞中であるか否かを、前述同様の手段により判断する(ステップS14)。
隣車線が渋滞中であったときには、そのままステップS1へリターンするが、渋滞していなかったとき(ステップS14:NO)には、前記車線変更推奨メッセージ発生ステップS12を実行した後にステップS1へリターンする。
【0036】
尚、図2中に示されていないが、制御装置2は、操作スイッチ群6、リモコン7a、マイクロホン18aを通じて操作コマンドや音声コマンドの入力があった場合には、そのコマンドに対応する割り込み処理を実行する構成となっている。
【0037】
要するに、図2に示すような制御が行われる結果、以下に述べるような作用・効果が得られるものである。
即ち、制御装置2は、案内経路に基づいた案内動作の実行期間中においては、自車両が走行中の車線を、例えば前方カメラ19により撮影した前方画像の解析データ並びに地図データを利用して認識すると共に、案内経路に沿った前方交差点に、右左折や直進などの進路規制があるか否かを判断(検出)する。また、制御装置2は、上記車線認識状態で、自車両の運転者が意図する走行車線変更行動の有無を、例えばターンシグナルスイッチ12からの信号に基づいて判断(検出)する。このような走行車線変更行動があった場合、制御装置2は、その変更行動が、上述のように判断した進路規制車線(または当該進路規制車線に続く車線)への車線変更であり、且つその車線変更後の進路規制に従って車両を走行させたと仮定したときに案内経路を逸脱する状態にあった場合には、自車両の運転者に向けた警報信号をスピーカ8aから発生するようになる。
【0038】
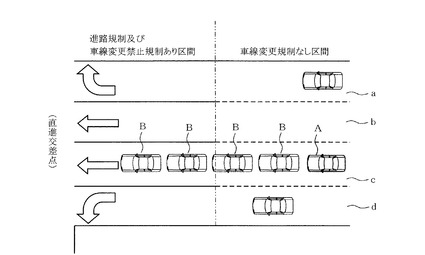
このような警報信号の発生タイミングを図面により説明すると、以下のようになる。つまり、図3に模式的に示すように、例えば4本の車線a、b、c、dがある道路において、案内経路では左折対象となる交差点(図3中では左折交差点と表記)の手前に各車線a、b、c、dに係る進路規制及び車線変更禁止規制区間がある状態を想定する。この場合、交差点において左折のみが許容された車線dを走行中の自車両Aの運転者が、前方に多数台の車両Bが並んでいる状況に反応して隣車線cへ車線変更したときには、当該車線cをそのまま走行すると進路規制(直進のみ許可)があるため、交通規則を遵守した運転の結果、案内経路を逸脱することになる。この場合、本実施例では、車線dを走行中の自車両Aの運転者が、隣車線cへの走行車線変更行動を起こしたとき(案内経路の逸脱原因となる誤った車線変更を実施しようとしたとき)には、当該運転者に向けて、車線変更を思い止まらせるような警報信号が発せられることになるから、誤った車線変更を未然に防止できるようになる。この結果、経路案内中の目的地に到達するまでの所要時間が従来のように無闇に延びてしまう恐れがない適切な経路案内を実施可能になる。
【0039】
また、制御装置2は、案内経路に基づいた案内動作の実行期間中において、自車両の走行車線並びにその隣車線の渋滞状況を、例えば前方カメラ19により撮影した前方画像に基づいてリアルタイムに判断(検出)し、自車両の走行車線が渋滞し且つ隣車線が渋滞していない場合には、その隣車線への車線変更を推奨するメッセージをスピーカ8aから発生する報知動作を、案内経路に沿った前方交差点の進路規制状況を加味して実施するようになる。
【0040】
具体的には、案内経路に沿った前方交差点に進路規制がない場合には、自車両の走行車線が渋滞し且つ隣車線が渋滞していないことを前提に、自車両の運転者に向けて隣車線への車線変更を推奨する車線変更推奨メッセージの報知動作を行う。これに対して、案内経路に沿った前方交差点に進路規制がある場合には、隣車線への車線変更後の進路規制に従って自車両を走行させたときに案内経路を逸脱しない場合のみ、自車両の運転者に向けて隣車線への車線変更を推奨する車線変更推奨メッセージの報知動作を行うようになる。
【0041】
このような進路規制も加味した車線変更推奨メッセージの発生タイミングを図面により説明すると、以下のようになる。つまり、図4に模式的に示すように、例えば4本の車線a、b、c、dがある道路において、案内経路では直進対象となる交差点(図4中では直進交差点と表記)の手前に各車線a、b、c、dに係る進路規制及び車線変更禁止規制区間がある状態を想定する。この場合、自車両Aが走行中の車線cが他の車両Bにより渋滞し、その隣車線bが渋滞していない状況において、当該隣車線bへの車線変更後の進路規制に従って自車両を走行させたときに前記案内経路を逸脱しない場合には、自車両Aの運転者に向けて隣車線bへの車線変更推奨メッセージの報知動作を行うようになる。要するに、自車両Aが走行中の車線cが渋滞している場合には、案内経路の変更がない範囲で隣接する非渋滞車線bへの移動が推奨されることになる。この結果、経路案内中の目的地に到達するまでの所要時間を短縮できる適切な経路案内を実施可能になるものであり、これと同時に、車両運転者にとって不案内な道路でも安心して車線変更を行い得るようになる、という効果も得られるようになる。
【0042】
また、本実施例によれば、進路規制がある車線の検出を、前方カメラ19による撮影画像の解析によっても行い得る構成となっているから、制御装置2にあっては、そのような進路規制がある車線に係る情報を提供するインフラ(VICSなど)が整備されていない場所、或いは当該情報を提供する地図データが不十分な場所などにおいても、前記警報信号や前記車線変更推奨メッセージの発生制御を確実に実行できるようになる。
【0043】
(その他の実施の形態)
本発明は上記した実施例に限定されるものではなく、例えば以下のような変形または拡張が可能である。
制御装置2に対して、交差点手前の進路規制がある車線の検出結果の全部、或いは前方カメラ19による撮影画像の解析による検出結果のみを、外部メモリ9(請求項4及び5記載の発明でいう記憶手段に相当)に記憶し、この外部メモリ9の記憶内容を前記警報信号の出力制御や前記車線変更推奨メッセージの報知動作の制御に利用する機能を付加しても良い。このような構成によれば、進路規制が存在する車線についての過去の検出結果、つまり進路規制が存在する車線についての情報が外部メモリ9に蓄積されることになるから、制御装置2にあっては、そのような情報を前記実施例のような手段では取得できないような状態(例えば情報提供元のインフラとの通信障害が発生した状態、前方カメラ19により自車両の前方の景色を鮮明に撮影できない状態など)となった場合でも、外部メモリ9に記憶された情報を利用して、警報信号や車線変更推奨メッセージの発生制御を確実に行い得るようになる。
制御装置2に対して、交差点手前の車線変更禁止規制区間において、自車両の運転者が走行車線変更行動を起こしたときに、その車線変更が交通違反になることを報知する警報信号(アラーム音或いは警告メッセージ)を発生する機能を付加しても良い。
【図面の簡単な説明】
【0044】
【図1】本発明の一実施例の電気的構成を示す機能ブロック図
【図2】制御装置による制御内容を示すフローチャート
【図3】作用説明用の模式図(その1)
【図4】作用説明用の模式図(その2)
【符号の説明】
【0045】
1はカーナビゲーション装置(車両用経路案内装置)、2は制御装置(経路探索手段、走行車線認識手段、規制状態検出手段、運転者意図検出手段、制御手段)、3は位置検出器、4は地図データベース、5は表示装置、9は外部メモリ、12はターンシグナルスイッチ、19は前方カメラ(車載カメラ)を示す。
【技術分野】
【0001】
本発明は、地図データに基づいて出発地から目的地までの案内経路を算出し、その案内経路に基づいて車両進行方向に係る案内動作を行う機能を備えた車両用経路案内装置に関する。
【背景技術】
【0002】
出発地(現在位置或いはユーザによる設定位置)から目的地までの案内経路を地図画面上で表示するようにした車両用経路案内装置を利用する場合、車両を上記案内経路に沿って走行させることができない状態(例えば、直進すべきところを右折或いは左折のみが許容された車線へ誤って進入した状態、この逆に右折或いは左折すべきところを直進のみが許容された車線へ誤って進入した状態など)が発生する可能性が多々ある。このような状況に陥った場合、従来の車両用経路案内装置では、車両が未だ案内経路上を走行しているため、案内経路の再探索が行われず、例えば右折できないにもかかわらず右折の案内、つまり交通違反に繋がる案内が行われることになり、運転者に不快感を与える恐れがある。従来では、このような状況に対処するため、例えば特許文献1に見られるように、路側のビーコンから受信したデータに基づいて次の交差点に車線変更禁止区域が存在することを検出した場合に、案内経路以外の新経路を探索してメモリに予め記憶しておき、当該交差点に差し掛かった自車両の走行車線が誤ったものであった場合には、その走行車線に対応した新経路をメモリから読み出して地図画面上に表示することが行われている。
【特許文献1】特開平8−110236号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
特許文献1に記載された手段では、車両が誤って不適正な車線へ進入したとしても、それに即した新たな案内経路が表示されるから、その案内経路に沿った走行が交通違反に繋がる事態を防止可能になる。しかしながら、この手段では、本来走行すべきルートから逸脱した経路案内が行われるため遠回りになるケースが多くなり、結果的に、目的地に到達するまでの所要時間が無闇に延びてしまう、という問題点が出てくる。
【0004】
この場合、一般的な車両運転者にあっては、走行中の車線が渋滞している場合には隣接した車線へ移動するという運転操作を行い勝ちであり、これが上記のような誤った車線変更の原因になるという背景がある。従って、誤った車線変更が行われようとしている場合に、車両運転者に対する警告動作を行うようにすれば、前記問題点が発生することを未然に防止可能になると考えられる。また、このような警告動作とは逆に、例えば、走行中の車線のみが渋滞している場合に、案内経路の変更がない範囲で隣接する車線(渋滞していない車線)への移動を推奨する報知動作を行うようにすれば、目的地に到達するまでの所要時間の短縮が可能になると共に、車両運転者にとって不案内な道路でも安心して車線変更を行い得るようになる、と考えられる。
【0005】
本発明は、上記事情に鑑みてなされたものであり、その目的は、目的地への到達時間が無闇に延びる恐れがない適切な経路案内を実施可能となる車両用経路案内装置を提供することにある。
【課題を解決するための手段】
【0006】
請求項1記載の手段によれば、経路探索手段により算出された案内経路に基づいた案内動作が行われている期間中においては、制御手段が、自車両が走行中の車線を走行車線認識手段の出力に基づいて認識すると共に、その認識状態で、自車両の運転者が意図する走行車線変更行動が運転者意図検出手段により検出された場合に、当該変更行動が規制状態検出手段により検出された進路規制車線または当該進路規制車線に続く車線への車線変更であり、且つその車線変更後の進路規制に従って車両を走行させたときに前記案内経路を逸脱する場合には、自車両の運転者に向けて警報信号を発生するようになる。つまり、車両運転者が、案内経路の逸脱原因となる誤った車線変更を実施しようとした場合には、当該運転者に対して、その車線変更を思い止まらせるような警報信号が発せられることになるから、誤った車線変更を未然に防止できるようになる。この結果、目的地に到達するまでの所要時間が従来のように無闇に延びてしまう恐れがない適切な経路案内を実施可能になる。
【0007】
請求項2記載の手段によれば、経路探索手段により算出された案内経路に基づいた案内動作が行われている期間中においては、制御手段が、走行車線認識手段により認識される自車両の走行車線並びにその隣車線の渋滞状況を前記渋滞検出手段の検出出力に基づいて判断し、自車両の走行車線が渋滞し且つ隣車線が渋滞していない場合には、その隣車線の進路規制状態を規制状態検出手段の検出出力に基づいて判断し、当該隣車線への車線変更後の進路規制に従って自車両を走行させたときに前記案内経路を逸脱しない場合に、自車両の運転者に向けて隣車線への車線変更を推奨する報知動作を行うようになる。つまり、自車両が走行中の車線のみが渋滞しているような状況下では、案内経路の変更がない範囲で隣接する車線(渋滞していない車線)への移動が推奨されることになる。この結果、目的地に到達するまでの所要時間を短縮できる適切な経路案内を実施可能になるものであり、これと同時に、車両運転者にとって不案内な道路でも安心して車線変更を行い得るようになる、という効果も得られるようになる。
【0008】
請求項3記載の手段によれば、進路規制がある車線の検出を、車載カメラによる撮影画像を利用して行うことができるから、前記制御手段にあっては、そのような進路規制がある車線に係る情報を提供するインフラが整備されていない場所、或いは当該情報を提供する地図データが不十分な場所などにおいても、前記警報信号を発生する制御或いは前記報知動作を実行する制御が可能になる。
【0009】
請求項4及び5記載の手段によれば、規制状態検出手段において過去に検出された情報、つまり進路規制が存在する車線についての情報が記憶手段に蓄積されることになるから、前記制御手段にあっては、そのような情報を規制状態検出手段から取得できないような状態(例えば情報提供元のインフラとの通信障害が発生した状態、車載カメラにより自車両の前方の景色を鮮明に撮影できない状態など)となった場合でも、記憶手段に記憶された情報を利用して、前記警報信号を発生する制御或いは前記報知動作を実行する制御を確実に行い得るようになる。
【発明を実施するための最良の形態】
【0010】
以下、本発明の一実施例について図面を参照しながら説明する。
図1には、車両に搭載されたカーナビゲーション装置1(車両用経路案内装置に相当)及びこれに関連した部分の電気的構成が機能ブロックの組み合わせにより概略的に示されている。この図1において、カーナビゲーション装置1は、そのナビゲーション動作を制御する機能を有した制御装置2(経路探索手段、走行車線認識手段、規制状態検出手段、運転者意図検出手段、制御手段に相当)に対して、位置検出器3、地図データベース4、表示装置5、操作スイッチ群6、リモコンセンサ7、音声コントローラ8、外部メモリ9、VICS受信機10、オーディオ装置11、ターンシグナルスイッチ12、カメラインタフェース13などを接続して構成されている。
【0011】
制御装置2は、CPU、ROM、RAM、I/Oインタフェース及びこれらを接続するバスラインなど(何れも図示せず)を備えたマイクロコンピュータにより構成されている。これらのうち、ROMには、カーナビゲーション用のプログラムなどが格納され、RAMにはプログラム実行時の処理データの他に地図データベース4から取得した道路地図データ、VICS受信機10が受信した道路交通情報、カメラインタフェース13を通じて与えられる画像データなどが一時的に格納される。
【0012】
位置検出器3は、例えば、GPS用人工衛星からの信号を受信するGPS受信機14、ヨーレートを検出するためのジャイロセンサ15、車両の走行距離を検出するための距離センサ16、車両のピッチング方向の傾斜角を検出するための傾斜角センサ17などを含んで構成されており、車両の現在位置情報を算出する部分である。
【0013】
地図データベース4は、CD−ROMやDVD−ROM或いはHDDなどのような大容量の情報記録媒体(不揮発性の半導体メモリでも実現可能)を利用して構成されたものであり、地図表示のための地図描画用データ、マップマッチングや経路探索、経路案内などの種々の処理に必要な道路データ(右左折や直進などの進路規制や車線変更規制がある車線に係る規制情報も含む)、交差点の詳細データから成る交差点データ、背景レイヤのための背景データ、地名などを表示するための地名データの他に、施設名称を例えば50音順に並べた施設名称データベース、電話番号と施設の対応を示す電話番号データベースなど、多様な地図データが記憶されている。
【0014】
表示装置5は、地図画面などを表示するための例えばカラー液晶ディスプレイを含んで構成されており、車両の運転席近傍に設置される。この表示装置5の画面には、通常時において縮尺を複数段階に変更可能な道路地図が表示されると共に、その表示に重ね合わせて、車両の現在位置及び進行方向を示すポインタが表示されるようになっている。また、周知のダイクストラ法を用いて行われる出発地から目的地までの経路計算結果に基づいた経路案内機能の実行時には、道路地図に重ね合わせた状態で進むべき案内経路(誘導経路)が表示されるようになっている。さらに、ユーザ(一般的には車両の運転者)による目的地などの検索及び入力のための各種のメニュー画面及び入力画面、並びに各種のメッセージ・インフォメーションやヘルプ画面なども表示されるようになっている。
【0015】
操作スイッチ群6は、表示装置5の周辺に配置されたメカニカルスイッチや当該表示装置5のディスプレイ上に形成されたタッチパネルスイッチなどから成り、その操作に応じて、カーナビゲーション装置1に係る各種機能(例えば、地図縮尺変更、メニュー表示選択、目的地設定、経路探索、経路案内開始、現在位置修正、表示画面変更、音量調整など)の実行を指示する種々の操作コマンドを発生して制御装置2に与える構成となっている。
【0016】
リモコンセンサ7は、リモコン7aからのリモコン信号、つまり、上述したカーナビゲーション装置1に係る各種機能の実行を指示するための種々の操作コマンドを含む信号を制御装置2に与えるために設けられている。
【0017】
音声コントローラ8は、音声合成回路及びアンプなどを含んで構成されたもので、音声認識装置18を制御すると共に、音声入力があった運転者などに対し、スピーカ8aを通じてトークバック出力制御(音声出力)する。また、制御装置2からの音声情報(経路案内のためのメッセージや画面操作に係るガイダンスなど)をスピーカ8aから出力すると共に、音声認識装置18による音声認識結果を制御装置2に与える処理を実行する。
【0018】
尚、音声認識装置18は、マイクロホン18aからの音声入力をデジタルデータに変換する音声抽出部、音声認識用の比較パターン候補辞書を含んで成る音声認識部などを備えたもので、ユーザが発した音声を認識した結果を音声コントローラ8経由で制御装置2に与える構成となっている。また、この音声認識装置18は、前記操作スイッチ群6による種々の操作コマンドに対応した音声コマンドを識別できる構成となっており、この音声コマンドによりカーナビゲーション装置1に係る前述の各種機能の実行を指示できるようになっている。
【0019】
外部メモリ9は、フラッシュメモリなどのデータ書き換え可能な不揮発性メモリやHDDなどにより構成されたもので、電源オフ時にも消去してはいけない特定データを記憶したり、頻繁に使用するデータを地図データベースからコピーして利用したりするなどの用途のために設けられている。尚、外部メモリ9は、リムーバブルメディアにより構成しても良い。
【0020】
VICS受信機10は、VICSセンサユニットやFM多重放送受信機(何れも図示せず)などを備えたもので、例えばVICSセンサユニットがVICS局から受信した光/電波ビーコンなどによる道路交通情報やFM多重放送受信機が受信したFM多重放送からの道路交通情報を制御装置2に与える構成となっている。
【0021】
オーディオ装置11は、音源ユニット、チューナ、アンプ、多チャンネルスピーカなどを含んで構成されたもので、音源ユニット或いはチューナからの音声信号を多チャンネルスピーカから再生出力する動作を制御装置2からの指令に応じて実行する。上記音源ユニットとしては、多連装CDチェンジャ、HDD、MDなどが設けられるものであるが、特に、前記地図データベース4がHDDにより構成されている場合、或いは前記外部メモリ9がHDDにより構成されている場合には、当該HDDを音源ユニットとして兼用可能である。また、前記スピーカ8aは、オーディオ装置の多チャンネルスピーカの1チャンネルを利用して構成することも可能である。
【0022】
ターンシグナルスイッチ12は、車両の右折準備操作及び左折準備操作或いはレーンチェンジ操作が行われたときにウインカランプの点滅動作を行わせる周知構成のものであり、右折準備操作或いは右方向へのレーンチェンジ操作が行われたときに右折信号を制御装置2に与え、左折準備操作或いは左方向へのレーンチェンジ操作が行われたときに左折信号を制御装置2に与える構成となっている。
【0023】
カメラインタフェース13は、制御装置2と、自車両の前方を撮影可能に設置された前方カメラ19(車載カメラに相当)との間での信号授受を行うためのもので、制御装置2から前方カメラ19へは、その撮影動作の開始及び停止を指令する信号が与えられ、前方カメラ19から制御装置2へは、当該カメラ19が撮影した画像(自車両の前方画像)データが与えられる。
【0024】
制御装置2は、操作スイッチ群6或いはリモコンセンサ7を通じて入力された操作コマンドや音声認識装置18から入力された音声コマンドに基づいて、周知の地図表示機能、地図データベース4から取得した地図データを用いて出発地から目的地までの案内経路を算出する経路探索機能、算出された案内経路に基づいて車両進行方向に係る案内動作を行う経路案内機能、電話番号検索機能、郵便番号検索機能、マップコード(登録商標)のような固有コードを利用した検索機能、50音検索機能、ジャンル別検索機能、最寄り施設検索機能、目的地登録機能、地点登録機能など、多種多様な支援機能に係る処理を実行するように構成されているが、本発明の要旨に直接的に関係した機能として、車線変更管理機能が設定されている。
【0025】
そこで、以下においては、この車線変更管理機能について図2に示すフローチャートを参照しながら説明する。
図2には、制御装置2による制御内容のうち、上記車線変更管理機能を実現するための処理を含む制御内容が概略的に示されている。この図2において、まず、経路案内フラグ(操作コマンドや音声コマンドにより経路案内が指令されている状態を示す)がセットされているか否かを判断し(ステップS1)、セットされていない状態では、カーナビゲーション機能に係る通常処理ルーチンS2を実行した後にステップS1へリターンする。
【0026】
これに対して経路案内フラグがセットされていた場合には、表示装置5に表示中の地図画面上に、前記経路探索機能により算出した案内経路の表示などを行う案内経路表示ルーチンS3、自車両が走行中の車線を認識するステップS4を順次実行する。このような車線認識は、例えば、前方カメラ19により撮影した自車両前方画像の解析データと、地図データベース4から取得した地図データ(特に、車線数を示すデータ)とを利用して行うことができる。
【0027】
次いで、案内経路に沿った前方交差点手前の車線に、右左折や直進などの進路規制があるか否かを判断する(ステップS5)。このような進路規制がある車線の検出は、地図データベース4から取得した地図データやVICS受信機10を通じて取得した道路情報などに基づいて行うことになる。また、進路規制がある車線を、上記地図データや道路情報などにより検出できない場合には、前方カメラ19により撮影した前方画像の解析に基づいて検出する構成となっている。
【0028】
案内経路に沿った前方交差点手前の車線に進路規制がある場合には、自車両の運転者が意図する走行車線変更行動があるか否かを判断する(ステップS6)。このような走行車線変更行動は、ターンシグナルスイッチ12からの右折信号或いは左折信号の入力の有無に基づいて判断することになる。
【0029】
尚、上記のような走行車線変更行動の有無の判断を、他の手段、例えば、車両運転者の視線方向及びステアリング操作状態の各検出出力を利用した手段により行うことも可能である。具体的には、車両運転者の視線方向を検知する視線検知システム(例えば、車両運転者の顔部に向けて赤外光を投光する投光手段、車両運転者の顔部での反射赤外光を映像信号に変換する撮影手段、その映像信号に基づいて二値化処理や特徴点抽出処理などを行うことによって車両運転者の顔部の画像を抽出する画像処理手段、抽出された画像に基づいて車両運転者の視線方向を検出する演算手段を組み合わせたシステム)と、ステアリングホイールの操作角度及び操作方向を検出する操作状態検出手段とを設け、運転者の視線が隣車線或いは当該隣車線側のアウタミラー(ドアミラー)方向に向いた状態が予め設定された時間以上継続し、この状態でステアリングホイールが隣車線方向へ所定角度以上操作されたことを検出したときに、走行車線変更行動があったと判断する、などの構成とすることができる。
【0030】
ステップS6において走行車線変更行動ありと判断したときには、その変更先の車線を走行した場合に前方交差点での進路規制により自車両が案内経路を逸脱するか否かを判断する(ステップS7)。つまり、走行車線変更行動による変更先の車線をそのまま走行したと仮定したときに、前方交差点での進路規制に従った運転に伴い案内経路を逸脱する、と想定される状態時にはステップS7で「YES」と判断されることになる。
【0031】
このようにステップS7で「YES」と判断されたときには、音声コントローラ8からスピーカ8aを通じて警報信号を発生し(ステップS8)、この後にステップS1へリターンする。また、ステップS7で「NO」と判断されたときには、警報信号発生ステップS8をジャンプしてステップS1へリターンする。尚、このときの警報信号は、車両運転者の注意を喚起するアラーム音でも良いが、走行車線変更行動を制止する内容のメッセージ(音声コントローラ8内の音声合成回路により生成した合成音)であっても良い。
【0032】
一方、前記ステップS6において走行車線変更行動なしと判断したときには、自車両の走行車線(特には自車両の前方)が渋滞中か否かを判断する(ステップS9)。このような渋滞状態の判断は、例えば、前方カメラ19により撮影した自車両前方画像を解析することによりリアルタイムに行うことができる。尚、渋滞の有無の判断に他の手段、例えば車載レーダの探索結果による判断手段、路側インフラからのデータ提供手段などを利用しても良い。
【0033】
自車両の走行車線が渋滞していないと判断したとき(ステップS9:NO)には、そのままステップS1へリターンするが、渋滞中であると判断したときには、当該走行車線の隣車線が渋滞中であるか否かを、前述同様の手段により判断する(ステップS10)。
隣車線が渋滞中であったときには、そのままステップS1へリターンするが、渋滞していなかったとき(ステップS10:NO)には、その隣車線を走行した場合に前方交差点での進路規制により自車両が案内経路を逸脱するか否かを判断する(ステップS11)。つまり、渋滞していないと判断した隣車線をそのまま走行したと仮定したときに、前方交差点での進路規制に従った運転に伴い案内経路を逸脱する、と想定される状態時にはステップS11で「YES」と判断されることになる。
【0034】
このようにステップS11で「YES」と判断されたときには、そのままステップS1へリターンするが、「NO」と判断されたとき、つまり、渋滞していないと判断した隣車線をそのまま走行しても支障がないと考えられるときには、音声コントローラ8からスピーカ8aを通じて車線変更推奨メッセージを発生し(ステップS12)、この後にステップS1へリターンする。尚、上記車線変更推奨メッセージは、音声コントローラ8内の音声合成回路により生成することになる。
【0035】
前記ステップS5で「NO」と判断した場合、つまり、案内経路に沿った前方交差点に進路規制がなかった場合には、自車両の走行車線(特には自車両の前方)が渋滞中か否かを前述同様の手段により判断する(ステップS13)。この場合、自車両の走行車線が渋滞していないと判断したとき(ステップS13:NO)には、そのままステップS1へリターンするが、渋滞中であると判断したときには、当該走行車線の隣車線が渋滞中であるか否かを、前述同様の手段により判断する(ステップS14)。
隣車線が渋滞中であったときには、そのままステップS1へリターンするが、渋滞していなかったとき(ステップS14:NO)には、前記車線変更推奨メッセージ発生ステップS12を実行した後にステップS1へリターンする。
【0036】
尚、図2中に示されていないが、制御装置2は、操作スイッチ群6、リモコン7a、マイクロホン18aを通じて操作コマンドや音声コマンドの入力があった場合には、そのコマンドに対応する割り込み処理を実行する構成となっている。
【0037】
要するに、図2に示すような制御が行われる結果、以下に述べるような作用・効果が得られるものである。
即ち、制御装置2は、案内経路に基づいた案内動作の実行期間中においては、自車両が走行中の車線を、例えば前方カメラ19により撮影した前方画像の解析データ並びに地図データを利用して認識すると共に、案内経路に沿った前方交差点に、右左折や直進などの進路規制があるか否かを判断(検出)する。また、制御装置2は、上記車線認識状態で、自車両の運転者が意図する走行車線変更行動の有無を、例えばターンシグナルスイッチ12からの信号に基づいて判断(検出)する。このような走行車線変更行動があった場合、制御装置2は、その変更行動が、上述のように判断した進路規制車線(または当該進路規制車線に続く車線)への車線変更であり、且つその車線変更後の進路規制に従って車両を走行させたと仮定したときに案内経路を逸脱する状態にあった場合には、自車両の運転者に向けた警報信号をスピーカ8aから発生するようになる。
【0038】
このような警報信号の発生タイミングを図面により説明すると、以下のようになる。つまり、図3に模式的に示すように、例えば4本の車線a、b、c、dがある道路において、案内経路では左折対象となる交差点(図3中では左折交差点と表記)の手前に各車線a、b、c、dに係る進路規制及び車線変更禁止規制区間がある状態を想定する。この場合、交差点において左折のみが許容された車線dを走行中の自車両Aの運転者が、前方に多数台の車両Bが並んでいる状況に反応して隣車線cへ車線変更したときには、当該車線cをそのまま走行すると進路規制(直進のみ許可)があるため、交通規則を遵守した運転の結果、案内経路を逸脱することになる。この場合、本実施例では、車線dを走行中の自車両Aの運転者が、隣車線cへの走行車線変更行動を起こしたとき(案内経路の逸脱原因となる誤った車線変更を実施しようとしたとき)には、当該運転者に向けて、車線変更を思い止まらせるような警報信号が発せられることになるから、誤った車線変更を未然に防止できるようになる。この結果、経路案内中の目的地に到達するまでの所要時間が従来のように無闇に延びてしまう恐れがない適切な経路案内を実施可能になる。
【0039】
また、制御装置2は、案内経路に基づいた案内動作の実行期間中において、自車両の走行車線並びにその隣車線の渋滞状況を、例えば前方カメラ19により撮影した前方画像に基づいてリアルタイムに判断(検出)し、自車両の走行車線が渋滞し且つ隣車線が渋滞していない場合には、その隣車線への車線変更を推奨するメッセージをスピーカ8aから発生する報知動作を、案内経路に沿った前方交差点の進路規制状況を加味して実施するようになる。
【0040】
具体的には、案内経路に沿った前方交差点に進路規制がない場合には、自車両の走行車線が渋滞し且つ隣車線が渋滞していないことを前提に、自車両の運転者に向けて隣車線への車線変更を推奨する車線変更推奨メッセージの報知動作を行う。これに対して、案内経路に沿った前方交差点に進路規制がある場合には、隣車線への車線変更後の進路規制に従って自車両を走行させたときに案内経路を逸脱しない場合のみ、自車両の運転者に向けて隣車線への車線変更を推奨する車線変更推奨メッセージの報知動作を行うようになる。
【0041】
このような進路規制も加味した車線変更推奨メッセージの発生タイミングを図面により説明すると、以下のようになる。つまり、図4に模式的に示すように、例えば4本の車線a、b、c、dがある道路において、案内経路では直進対象となる交差点(図4中では直進交差点と表記)の手前に各車線a、b、c、dに係る進路規制及び車線変更禁止規制区間がある状態を想定する。この場合、自車両Aが走行中の車線cが他の車両Bにより渋滞し、その隣車線bが渋滞していない状況において、当該隣車線bへの車線変更後の進路規制に従って自車両を走行させたときに前記案内経路を逸脱しない場合には、自車両Aの運転者に向けて隣車線bへの車線変更推奨メッセージの報知動作を行うようになる。要するに、自車両Aが走行中の車線cが渋滞している場合には、案内経路の変更がない範囲で隣接する非渋滞車線bへの移動が推奨されることになる。この結果、経路案内中の目的地に到達するまでの所要時間を短縮できる適切な経路案内を実施可能になるものであり、これと同時に、車両運転者にとって不案内な道路でも安心して車線変更を行い得るようになる、という効果も得られるようになる。
【0042】
また、本実施例によれば、進路規制がある車線の検出を、前方カメラ19による撮影画像の解析によっても行い得る構成となっているから、制御装置2にあっては、そのような進路規制がある車線に係る情報を提供するインフラ(VICSなど)が整備されていない場所、或いは当該情報を提供する地図データが不十分な場所などにおいても、前記警報信号や前記車線変更推奨メッセージの発生制御を確実に実行できるようになる。
【0043】
(その他の実施の形態)
本発明は上記した実施例に限定されるものではなく、例えば以下のような変形または拡張が可能である。
制御装置2に対して、交差点手前の進路規制がある車線の検出結果の全部、或いは前方カメラ19による撮影画像の解析による検出結果のみを、外部メモリ9(請求項4及び5記載の発明でいう記憶手段に相当)に記憶し、この外部メモリ9の記憶内容を前記警報信号の出力制御や前記車線変更推奨メッセージの報知動作の制御に利用する機能を付加しても良い。このような構成によれば、進路規制が存在する車線についての過去の検出結果、つまり進路規制が存在する車線についての情報が外部メモリ9に蓄積されることになるから、制御装置2にあっては、そのような情報を前記実施例のような手段では取得できないような状態(例えば情報提供元のインフラとの通信障害が発生した状態、前方カメラ19により自車両の前方の景色を鮮明に撮影できない状態など)となった場合でも、外部メモリ9に記憶された情報を利用して、警報信号や車線変更推奨メッセージの発生制御を確実に行い得るようになる。
制御装置2に対して、交差点手前の車線変更禁止規制区間において、自車両の運転者が走行車線変更行動を起こしたときに、その車線変更が交通違反になることを報知する警報信号(アラーム音或いは警告メッセージ)を発生する機能を付加しても良い。
【図面の簡単な説明】
【0044】
【図1】本発明の一実施例の電気的構成を示す機能ブロック図
【図2】制御装置による制御内容を示すフローチャート
【図3】作用説明用の模式図(その1)
【図4】作用説明用の模式図(その2)
【符号の説明】
【0045】
1はカーナビゲーション装置(車両用経路案内装置)、2は制御装置(経路探索手段、走行車線認識手段、規制状態検出手段、運転者意図検出手段、制御手段)、3は位置検出器、4は地図データベース、5は表示装置、9は外部メモリ、12はターンシグナルスイッチ、19は前方カメラ(車載カメラ)を示す。
【特許請求の範囲】
【請求項1】
地図データを用いて出発地から目的地までの案内経路を算出する経路探索手段を備え、この経路探索手段により算出された案内経路に基づいて車両進行方向に係る案内動作を行う車両用経路案内装置において、
自車両が走行中の車線を認識する走行車線認識手段と、
前記案内経路中に存在する交差点手前の車線のうち進路規制がある車線を検出する規制状態検出手段と、
自車両の運転者が意図する走行車線変更行動を検出する運転者意図検出手段と、
前記案内動作が行われている期間に、自車両が走行中の車線を前記走行車線認識手段の出力に基づいて認識すると共に、その認識状態で前記運転者意図検出手段により前記走行車線変更行動が検出された場合に、当該変更行動が前記規制状態検出手段により検出された進路規制車線または当該進路規制車線に続く車線への車線変更であり、且つその車線変更後の進路規制に従って車両を走行させたときに前記案内経路を逸脱する場合に、自車両の運転者に向けて警報信号を発生する制御手段と、
を備えたことを特徴とする車両用経路案内装置。
【請求項2】
地図データを用いて出発地から目的地までの案内経路を算出する経路探索手段を備え、この経路探索手段により算出された案内経路に基づいて車両進行方向に係る案内動作を行う車両用経路案内装置において、
自車両が走行中の車線を認識する走行車線認識手段と、
前記案内経路中に存在する交差点手前の車線のうち進路規制がある車線を検出する規制状態検出手段と、
車両の進行先に存在する複数車線での車両渋滞状況をリアルタイムに検出する渋滞検出手段と、
前記案内動作が行われている期間に、前記走行車線認識手段により認識される自車両の走行車線並びにその隣車線の渋滞状況を前記渋滞検出手段の検出出力に基づいて判断し、自車両の走行車線が渋滞し且つ隣車線が渋滞していない場合に、その隣車線の進路規制状態を前記規制状態検出手段の検出出力に基づいて判断し、当該隣車線への車線変更後の進路規制に従って車両を走行させたときに前記案内経路を逸脱しない場合に、自車両の運転者に向けて隣車線への車線変更を推奨する報知動作を行う制御手段と、
を備えたことを特徴とする車両用経路案内装置。
【請求項3】
前記規制状態検出手段は、前記進路規制がある車線の検出を、車載カメラにより撮影した自車両の前方画像の解析に基づいて実行可能に構成されていることを特徴とする請求項1または2記載の車両用経路案内装置。
【請求項4】
前記制御手段は、前記規制状態検出手段による検出結果を記憶する記憶手段を備え、この記憶手段の記憶内容を前記警報信号の出力制御に利用することを特徴とする請求項1または3記載の車両用経路案内装置。
【請求項5】
前記制御手段は、前記規制状態検出手段による検出結果を記憶する記憶手段を備え、この記憶手段の記憶内容を前記報知動作の実行制御に利用することを特徴とする請求項2または3記載の車両用経路案内装置。
【請求項1】
地図データを用いて出発地から目的地までの案内経路を算出する経路探索手段を備え、この経路探索手段により算出された案内経路に基づいて車両進行方向に係る案内動作を行う車両用経路案内装置において、
自車両が走行中の車線を認識する走行車線認識手段と、
前記案内経路中に存在する交差点手前の車線のうち進路規制がある車線を検出する規制状態検出手段と、
自車両の運転者が意図する走行車線変更行動を検出する運転者意図検出手段と、
前記案内動作が行われている期間に、自車両が走行中の車線を前記走行車線認識手段の出力に基づいて認識すると共に、その認識状態で前記運転者意図検出手段により前記走行車線変更行動が検出された場合に、当該変更行動が前記規制状態検出手段により検出された進路規制車線または当該進路規制車線に続く車線への車線変更であり、且つその車線変更後の進路規制に従って車両を走行させたときに前記案内経路を逸脱する場合に、自車両の運転者に向けて警報信号を発生する制御手段と、
を備えたことを特徴とする車両用経路案内装置。
【請求項2】
地図データを用いて出発地から目的地までの案内経路を算出する経路探索手段を備え、この経路探索手段により算出された案内経路に基づいて車両進行方向に係る案内動作を行う車両用経路案内装置において、
自車両が走行中の車線を認識する走行車線認識手段と、
前記案内経路中に存在する交差点手前の車線のうち進路規制がある車線を検出する規制状態検出手段と、
車両の進行先に存在する複数車線での車両渋滞状況をリアルタイムに検出する渋滞検出手段と、
前記案内動作が行われている期間に、前記走行車線認識手段により認識される自車両の走行車線並びにその隣車線の渋滞状況を前記渋滞検出手段の検出出力に基づいて判断し、自車両の走行車線が渋滞し且つ隣車線が渋滞していない場合に、その隣車線の進路規制状態を前記規制状態検出手段の検出出力に基づいて判断し、当該隣車線への車線変更後の進路規制に従って車両を走行させたときに前記案内経路を逸脱しない場合に、自車両の運転者に向けて隣車線への車線変更を推奨する報知動作を行う制御手段と、
を備えたことを特徴とする車両用経路案内装置。
【請求項3】
前記規制状態検出手段は、前記進路規制がある車線の検出を、車載カメラにより撮影した自車両の前方画像の解析に基づいて実行可能に構成されていることを特徴とする請求項1または2記載の車両用経路案内装置。
【請求項4】
前記制御手段は、前記規制状態検出手段による検出結果を記憶する記憶手段を備え、この記憶手段の記憶内容を前記警報信号の出力制御に利用することを特徴とする請求項1または3記載の車両用経路案内装置。
【請求項5】
前記制御手段は、前記規制状態検出手段による検出結果を記憶する記憶手段を備え、この記憶手段の記憶内容を前記報知動作の実行制御に利用することを特徴とする請求項2または3記載の車両用経路案内装置。
【図1】


【図2】

【図3】

【図4】
【図2】
【図3】
【図4】
【公開番号】特開2007−147317(P2007−147317A)
【公開日】平成19年6月14日(2007.6.14)
【国際特許分類】
【出願番号】特願2005−338748(P2005−338748)
【出願日】平成17年11月24日(2005.11.24)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成19年6月14日(2007.6.14)
【国際特許分類】
【出願日】平成17年11月24日(2005.11.24)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]