
車両用衝突検知装置

【課題】2つの圧力センサにそれぞれの目的に応じた異なる検知レンジを設定することで、装置全体としての検知精度を向上させる車両衝突検知装置を提供する。
【解決手段】本発明は、車両に搭載され、チャンバ空間7aが内部に形成され且つ呼吸孔71aを有するチャンバ部材7と、チャンバ空間7aの圧力を検出する第一圧力センサ8と、チャンバ空間7aの圧力を検出する第二圧力センサ9と、第一圧力センサ8の検知信号に基づいて車両への衝突を判別する第一判別部11と、第二圧力センサ9の検知信号に基づいて車両への衝突を判別する第二判別部12と、第一判別部11及び第二判別部12の判別結果に基づいて車両への衝突情報を外部に送信する送信部13と、を備え、第二判別部12の検知レンジの大きさは、第一判別部11の検知レンジの大きさと異なることを特徴とする。
【解決手段】本発明は、車両に搭載され、チャンバ空間7aが内部に形成され且つ呼吸孔71aを有するチャンバ部材7と、チャンバ空間7aの圧力を検出する第一圧力センサ8と、チャンバ空間7aの圧力を検出する第二圧力センサ9と、第一圧力センサ8の検知信号に基づいて車両への衝突を判別する第一判別部11と、第二圧力センサ9の検知信号に基づいて車両への衝突を判別する第二判別部12と、第一判別部11及び第二判別部12の判別結果に基づいて車両への衝突情報を外部に送信する送信部13と、を備え、第二判別部12の検知レンジの大きさは、第一判別部11の検知レンジの大きさと異なることを特徴とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両への衝突を検知する車両用衝突検知装置に関するものである。
【背景技術】
【0002】
近年、多くの車両には、車両への衝突を検知する車両用衝突検知装置が搭載されている。車両用衝突検知装置には、チャンバ部材を用いて、衝突前後のチャンバ部材内部(チャンバ空間)の圧力変化を検出し、衝突を検知するもの(以下、単に車両用衝突検知装置と称する)があり、例えば特開2010−163155号公報(特許文献1)に記載されている。
【0003】
車両用衝突検知装置は、例えば、エアバッグ等の乗員保護装置や、アクティブフードやカウルエアバッグ等の歩行者保護装置の展開制御に必要な衝突判別に用いられる。衝突判別は、チャンバ空間の圧力上昇に基づく演算値が閾値を超えるか否かにより判別される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−163155号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のような車両衝突検知装置において、1つのチャンバ部材に対し2つの圧力センサを設け、冗長により検知精度を向上させることが行われている。しかし、一方の圧力センサを単に冗長用のセンサとして用いるだけでは、検知精度向上の面では限界があった。
【0006】
本発明は、このような事情に鑑みて為されたものであり、2つの圧力センサにそれぞれの目的に応じた異なる検知レンジを設定することで、装置全体としての検知精度を向上させる車両衝突検知装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するためになされた請求項1に記載の発明は、車両に搭載され、チャンバ空間が内部に形成され且つ呼吸孔を有するチャンバ部材と、チャンバ空間の圧力を検出する第一圧力センサと、チャンバ空間の圧力を検出する第二圧力センサと、第一圧力センサの検知信号に基づいて車両への衝突を判別する第一判別部と、第二圧力センサの検知信号に基づいて車両への衝突を判別する第二判別部と、第一判別部及び第二判別部の判別結果に基づいて車両への衝突情報を外部に送信する送信部と、を備え、第二判別部の検知レンジの大きさは、第一判別部の検知レンジの大きさと異なることを特徴とする。
【0008】
この構成によれば、2つの圧力センサに対して異なる検知レンジが設定されているため、各判別部がそれぞれに個別の衝突判別(例えば判別対象を異にする)を行い、当該別個の判別結果に基づいて最終的な衝突判別を行うことができる。つまり、2つの圧力センサに対し異なる目的・判別対象を設定でき、それぞれに適した別個の衝突判別が可能であるため、各判別部における判別精度は向上し、2つの判別結果に基づいて出される衝突判別、すなわち装置全体としての衝突検知の精度は向上する。なお、検知レンジとは、機器(演算装置等)が処理するためのセンサ出力信号の最大値と最小値の差などを意味する。
【0009】
請求項2に記載の発明は、第一判別部が、第一圧力センサの検知信号に基づいて、外気圧による圧力変化及び衝突による圧力上昇値を算出し、第二判別部は、検知レンジが第一判別部より小さく、第二圧力センサの検知信号に基づいて、衝突による圧力上昇値を算出することを特徴とする。
【0010】
この構成によれば、第二判別部は、検知レンジのほぼ全てを衝突による圧力上昇値の算出に用いることができるため、衝突による圧力上昇値に対するノイズの大きさを相対的に小さくする(すなわち、S/N比を向上させる)ことができ、圧力上昇値が少ない衝突判別対象に対して、より高精度な衝突判別ができる。なお、第一判別部の検知レンジは、衝突による圧力変化に加え、外気圧による圧力変化を包含し、車両が走行している標高も算出できる。なお、ノイズ信号の例としては、AD変換誤差やセンサ検知信号の増幅後の電気ノイズなどが挙げられる。
【0011】
請求項3に記載の発明は、第一圧力センサは、チャンバ空間の絶対圧を検出し、第二圧力センサは、外気圧に対するチャンバ空間の相対圧を検出することを特徴とする。この構成によれば、第二圧力センサは、相対圧を検出するため、衝突による圧力上昇値のみを効果的に第二判別部に送信することができる。
【0012】
請求項4に記載の発明は、第一判別部が車両への衝突物の種類を判別し、第二判別部が車両への衝突の有無を判別することを特徴とする。この構成によれば、第二判別部は、衝突の有無のみを判別できればよく簡易な演算処理で衝突判別を実現できるため、演算負荷を抑制でき、演算用部品のコストを抑制できる。
【0013】
請求項5に記載の発明は、チャンバ部材が、車両バンパのバンパカバー内でバンパレインフォースメントの前面に配設され、判別部が、車両への歩行者の衝突を判別することを特徴とする。この構成によれば、より高精度で且つコストを抑制した歩行者衝突検知装置を実現することができる。
【図面の簡単な説明】
【0014】
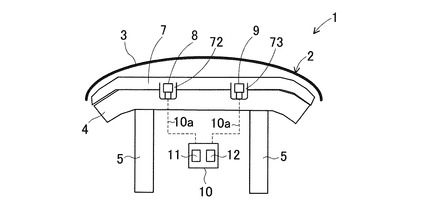
【図1】車両用衝突検知装置1を平面視にて示す全体構成図である。
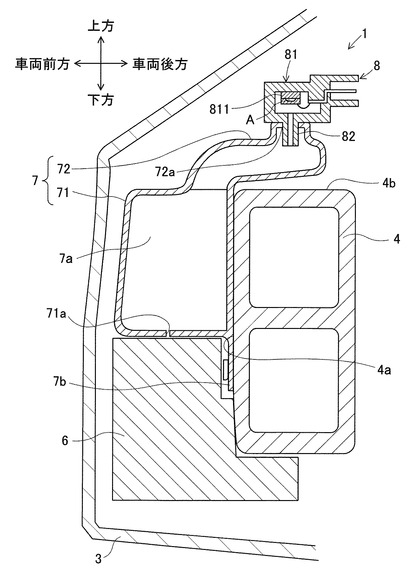
【図2】車両用衝突検知装置1を横から見た第一圧力センサ8を含む断面図である。
【図3】車両用衝突検知装置1を横から見た第二圧力センサ9を含む断面図である。
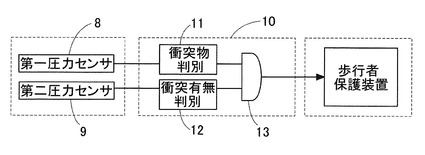
【図4】車両用衝突検知装置1の主構成を示す構成図である。
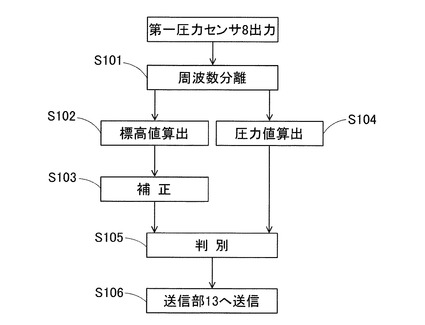
【図5】第一判別部11の処理フローを示す図である。
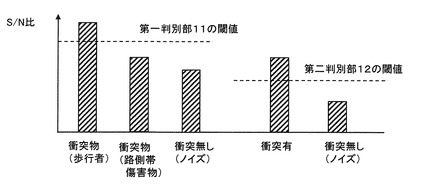
【図6】判別工程における閾値を示す模式図である。
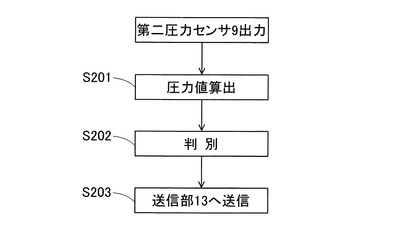
【図7】第二判別部12の処理フローを示す図である。
【発明を実施するための形態】
【0015】
次に、実施形態を挙げ、本発明をより詳しく説明する。本実施形態では、車両用衝突検知装置を歩行者の衝突を検知する歩行者衝突検知に適用したものを例として、図1〜図7を参照して説明する。
【0016】
車両用衝突検知装置1は、図1〜図3に示すように、車両バンパ2内に配設されたチャンバ部材7と、第一圧力センサ8と、第二圧力センサ9と、歩行者保護装置電子制御ユニット(以下、電子制御ユニットをECUと略記する)10と、を主体として構成されている。
【0017】
車両バンパ2は、バンパカバー3、バンパレインフォースメント4、サイドメンバ5、アブソーバ6、及び、チャンバ部材7を主体として構成されている。
【0018】
バンパカバー3は、車両前端にて車幅方向(左右方向)に延び、バンパレインフォースメント4、アブソーバ6、及びチャンバ部材7を覆うように車体に取り付けられる樹脂(例えば、ポリプロピレン)製カバー部材である。
【0019】
バンパレインフォースメント4は、バンパカバー3内に配設されて車幅方向に延びる金属製の構造部材であって、図2に示すように、内部中央に梁が設けられた中空部材である。
【0020】
サイドメンバ5は、車両の左右両側に位置して車両前後方向に延びる一対の金属製部材であり、その前端に上述したバンパレインフォースメント4が取り付けられる。
【0021】
アブソーバ6は、バンパカバー3内でバンパレインフォースメント4の前面4aの下方側に取り付けられる車幅方向に延びる発泡樹脂製部材であり、車両バンパ2における衝撃吸収作用を発揮する。
【0022】
チャンバ部材7は、バンパカバー3内でバンパレインフォースメント前面4aの上方側に配置され、ポリエチレンなどの軟質樹脂からなる車幅方向に延びる略箱状の中空部材である。チャンバ部材7の後端部には下方へ延設された舌状片7bが設けられ、チャンバ部材7は、その舌状片7bを介してリベット止め等によってバンパレインフォースメント前面4aに対して固定される。より詳細には、チャンバ部材7は、本体部71と、2つの延設部72、73とを備えている。
【0023】
本体部71は、チャンバ部材7の大部分を占めており、車幅方向に延びて内部に厚さ数mmの軟質樹脂の壁面によって囲まれた略密閉状のチャンバ空間7aを形成している。本体部71は、底面に僅かに開口した呼吸孔71aを有している。呼吸孔71aは、外部とチャンバ空間7aを連通させており、呼吸によりチャンバ空間7aの圧力を外気圧に合わせることができる。つまり、チャンバ空間7aの圧力(絶対圧)は、外気圧が変化することでも変化する。本体部71は、衝突により変形する部位であり、本体部71内の圧力変化がチャンバ空間7aの圧力変化として検出される。本体部71がチャンバ部材7の機能を発揮する本質的部分である。
【0024】
延設部72は、図1及び図2に示すように、軟質樹脂によって本体部71と一体的に成形され、本体部71の車幅方向の略中央部分からバンパレインフォースメント上面4bの上方に延び、車体前方側から車体後方側へ延設された部位である。延設部71aの内部空間は、本体部71の内部空間と連通しており、チャンバ空間7aの一部分を形成している。また、延設部72の上部には、内部空間(すなわち、チャンバ空間7a)を外部に連通させる差込口72aが設けられている。
【0025】
もう一方の延設部73は、図1及び図3に示すように、上記延設部72と同構成であって、差込口73aを有している。延設部73は、延設部72と離間して形成されている。
【0026】
第一圧力センサ8は、気体圧力を検出可能なセンサ装置であり、チャンバ部材7に組付けられてチャンバ空間7a内の圧力上昇値を検出可能に構成されている。詳細には、第一圧力センサ8は、図2に示すように、センサ本体81と、圧力導入管82と、を備えている。
【0027】
センサ本体81は、チャンバ部材7の外部にあって、圧力検出用のセンサ素子等を収容した部位である。本実施形態では、圧力検出用のセンサ素子として一般的なピエゾ素子(圧電素子)811を用いており、チャンバ空間7aの絶対圧を検出する。ここでの絶対圧は、真空に対する相対圧であり、ピエゾ素子811における後述する基準空間Aは、真空となっている。センサ本体81は、圧力に比例した電圧信号を出力し、信号線10aを介して歩行者保護装置ECU10へ信号送信する。
【0028】
圧力導入管82は、チャンバ空間7aの圧力をセンサ本体81に導入する略円筒状の管であり、センサ本体81から下方に伸びている。圧力導入管82は、チャンバ部材7の延設部72に設けられた差込口72aに差し込まれている。センサ本体81は、圧力導入管82を介してチャンバ空間7aの圧力を検出する。
【0029】
第二圧力センサ9は、延設部73に設置され、図3に示すように、センサ本体91と、圧力導入管92と、外圧導入管93と、を有している。センサ本体91は、センサ基板部911と、収容部912と、を有している。ピエゾ素子911は、収容部912の内部に配置される。ピエゾ素子911は、圧力検出の基準となる圧力をもつ基準空間Aを有している。ピエゾ素子911は、基準空間Aの圧力に対する素子外部の圧力を検出している。ピエゾ素子911は、基準空間Aを裏面側に開放する貫通孔Bを有している。
【0030】
収容部912は、内部に空間を形成し、当該内部空間は、圧力導入管92によりチャンバ空間7aと連通している。この構成は、第一圧力センサ8と同様の構成である。ここで、第二圧力センサ9においては、収容部912が、ピエゾ素子911の裏面が設置された壁面に、貫通孔Bに対応した貫通孔Cを有している。
【0031】
外圧導入管93は、一端が外部に開口し、他端が貫通孔Cに連通した導入路を有する管である。つまり、外圧導入管93は、センサ本体91に接続され、外部と貫通孔Cとを連通させている。これにより、ピエゾ素子911の基準空間Aは、貫通孔B、貫通孔C、及び外圧導入管93を介して、外部と連通している。つまり、ピエゾ素子911の基準となる圧力は、外気圧となる。ピエゾ素子911は、外気圧に対するチャンバ空間7aの圧力、すなわち相対圧を検出する。センサ本体91は、圧力に比例した電圧信号を出力し、信号線10aを介して歩行者保護装置ECU10へ信号送信する。
【0032】
なお、第一圧力センサ8は延設部72に、第二圧力センサ9は延設部73に、それぞれブランケット等(図示せず)により固定されている。
【0033】
歩行者保護装置ECU10は、図示しない歩行者保護装置(たとえば公知の歩行者保護用のエアバッグやフード跳ね上げ装置など)の起動制御を行うための電子制御装置であり、圧力センサ8、9から出力される信号が伝送線10aを介して入力されるように構成されている。歩行者保護装置ECU10は、両圧力センサ8、9における圧力検知信号に基づいて、車両バンパ2へ歩行者(すなわち、人体)が衝突したか否かを判別する処理を実行する。具体的に、歩行者保護装置ECU10は、図4に示すように、主に、第一判別部11と、第二判別部12と、送信部13と、を備えている。
【0034】
第一判別部11は、第一圧力センサ8からの出力信号を受信し、当該検知信号に基づいて衝突を判別するものである。具体的に、第一判別部11は、CPU(中央処理演算装置)を有する演算処理装置であって、CPUの性能に応じた所定の検知レンジを有している。第一判別部11は、設定されたプログラムに基づき以下の工程を実行する。
【0035】
まず、第一判別部11は、図5に示すように、検知レンジ内における第一圧力センサの出力信号を低周波成分と高周波成分とに分離する(S101:周波数分離工程)。この工程では、ローパスフィルタ及びハイパスフィルタが用いられる。続いて、第一判別部11は、分離された低周波成分に基づいて、車両が現在走行している標高(標高値)を算出する(S102:標高値算出工程)。外気圧の変化による圧力変化は、比較的緩やかな変化であるため、検知レンジ内の低周波成分を見ることで算出でき、外気圧から標高値が算出できる。
【0036】
続いて、第一判別部11は、標高値に基づいて、衝突判別の基準である閾値を補正する(S103:補正工程)。本実施形態において、この補正は、予め設定された補正値マップ(標高値ごとの補正値を記憶したデータ)に基づいて行われる。なお、補正対象は、高周波成分の増幅度でもよい。
【0037】
一方、第一判別部11は、分離された高周波成分に基づいて、衝突に起因して上昇する圧力値を算出する(S104:圧力値算出工程)。衝突による圧力変化は、瞬間的なものであり、検知レンジ内の高周波成分を見ることで算出できる。衝突があった場合、圧力値は上昇する。つまり、衝突時には、圧力値算出工程において、衝突により上昇した圧力値(圧力上昇値)が算出される。
【0038】
続いて、第一判別部11は、圧力値算出工程で算出された圧力上昇値(圧力値)と閾値とを比較し、圧力上昇値が閾値を超えた場合、歩行者が衝突したと判別する(S105:判別工程)。閾値は、後述する第二判別部12の閾値よりも大きく設定されており、コーン等に対する衝突などの小さな衝突は検知せず、歩行者との衝突以上の衝突を検知する。
【0039】
例えば、第一判別部11は、図6に示すように、検知レンジが大きいため閾値を大きく設定できる。図6の縦軸はS/N比である。なお、検知レンジは、CPUが処理できる信号の最大S/N比と最小S/N比で決まるものであり、ここでは、その最大S/N比と最小S/N比の差の大きさを意味する。検知信号のノイズに対する大きさが大きくなるほど、S/N比は大きくなる。つまり、衝突検知は、圧力上昇によるS/N比の上昇が閾値を超えるか否かによって行われる。
【0040】
第一判別部11は、ノイズや路側帯の障害物に対する衝突に対しても、S/N比が閾値を超えず、「衝突無し」と判別する。そして、第一判別部11は、歩行者が衝突した場合、S/N比の上昇が大きく、閾値を超えるため、「衝突有」と判別する。つまり、第一判別部11は、衝突物の種類を判別し、歩行者との衝突を検知する。
【0041】
第一判別部11は、後述する送信部13に判別情報を送信する(S106:送信工程)。第一判別部11は、検知レンジが大きく、検知信号の高周波成分と低周波成分とを分離することで、標高と衝突の両情報を算出することができる。
【0042】
一方、第二判別部12は、第二圧力センサ9からの出力信号を受信し、当該検知信号に基づいて衝突を判別するものである。具体的に、第二判別部12は、CPUを有する演算処理装置であって、CPUの性能は第一判別部11と比較して限定されている。つまり、第二判別部12は、検知レンジが第一判別部11より小さくなっている。第二判別部12は、設定されたプログラムに基づき以下の工程を実行する。
【0043】
第二判別部12は、図7に示すように、第二圧力センサ9からの出力信号に基づいて、圧力値を算出する(S201:圧力値算出工程)。第二圧力センサ9は、上記構成から、チャンバ空間7aの外気圧に対する相対圧を検出するため、出力信号に「外気圧による圧力変化」の成分が含まれていない。したがって、衝突によるチャンバ空間7aの圧力上昇のみを効果的に検出することができる。例えば、図6に示すように、ノイズがあったとしても、その大きさは、検知レンジ全体に対する大きさであるため相対的に小さくなる。
【0044】
第二判別部12は、周波数分離をすることなく、検知信号から直接、衝突による圧力上昇値を算出できる。さらに、第二判別部12は、すべての検知レンジを使用して衝突検知が可能となる。
【0045】
続いて、第二判別部12は、圧力値算出工程で算出された圧力上昇値(圧力値)と閾値とを比較し、圧力上昇値が閾値を超えた場合、「衝突有」と判別する(S202:判別工程)。図6に示すように、第二判別部12における閾値は、第一判別部11より低くなっており、衝突の有無のみを検知できる。そして、第二判別部12は、判別情報を送信部13に送信する(S203:送信工程)。
【0046】
送信部13は、第一判別部11及び第二判別部12からの判別情報に基づいて、衝突情報(歩行者の衝突の有無)を外部(電装機器等)に送信する。具体的に、送信部13は、両判別部11、12が「衝突有」と判別した場合に、歩行者保護装置に衝突信号(作動命令)を送信する。本実施形態において、送信部13は、論理回路のAND回路を用いて構成されている。
【0047】
このように、本実施形態の車両衝突検知装置1によれば、2つの圧力センサ8、9及び判別部11、12により、二重の衝突判別が可能となり、より高精度な衝突判別が可能となる。また、第一判別部11と第二判別部12の検知レンジが異なっているため、検知レンジが小さいほうに、安価なCPUを用いることができる。つまり、判別の二重化に伴うコスト増加を抑制することができる。例えば、第一圧力センサ8と第一判別部11とをメインセンサとし、第二圧力センサ9と安価な第二判別部12とをセーフィングセンサとして用いることができる。
【0048】
また、第二圧力センサ9は、相対圧を検出するため、衝突による圧力上昇のみを効果的に検出できる。したがって、第二判別部12は、検知レンジ全体で衝突に関する検知信号を見ることができる。つまり、本実施形態によれば、第二判別部12に高価なCPUを用いずとも、性能の低いものでも十分に且つ精度よく衝突の有無が検知できる。
【0049】
なお、車両用衝突検知装置1は、上記に限られない。例えば、車両用衝突検知装置1は、判別部11、12で実行する処理を一部圧力センサ8、9側で行う構成であってもよい。また、第一判別部11と第二判別部12は、別々のECUとして配置されてもよい。
【0050】
また、第一判別部11で実行する周波数分離工程は、ハイパスフィルタを用いずに行ってもよい。例えば、高周波成分は、ローパスフィルタ11aを介した低周波成分を、圧力センサ8の全体の出力信号から減算しても算出できる。第一判別部11は、このように演算により周波数分離を実行してもよい。
【0051】
また、車両用衝突検知装置1は、歩行者衝突検知に限られず、例えばエアバッグの展開制御(エアバッグECU)に係る衝突検知に用いられてもよい。
【符号の説明】
【0052】
1:車両用衝突検知装置、
2:車両バンパ、 3:バンパカバー、 4:バンパレインフォースメント、
5:サイドメンバ、 6:アブソーバ、 7:チャンバ部材、
8:第一圧力センサ、 9:第二圧力センサ、 10:歩行者保護装置ECU、
11:第一判別部、 12:第二判別部、 13:送信部
【技術分野】
【0001】
本発明は、車両への衝突を検知する車両用衝突検知装置に関するものである。
【背景技術】
【0002】
近年、多くの車両には、車両への衝突を検知する車両用衝突検知装置が搭載されている。車両用衝突検知装置には、チャンバ部材を用いて、衝突前後のチャンバ部材内部(チャンバ空間)の圧力変化を検出し、衝突を検知するもの(以下、単に車両用衝突検知装置と称する)があり、例えば特開2010−163155号公報(特許文献1)に記載されている。
【0003】
車両用衝突検知装置は、例えば、エアバッグ等の乗員保護装置や、アクティブフードやカウルエアバッグ等の歩行者保護装置の展開制御に必要な衝突判別に用いられる。衝突判別は、チャンバ空間の圧力上昇に基づく演算値が閾値を超えるか否かにより判別される。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2010−163155号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記のような車両衝突検知装置において、1つのチャンバ部材に対し2つの圧力センサを設け、冗長により検知精度を向上させることが行われている。しかし、一方の圧力センサを単に冗長用のセンサとして用いるだけでは、検知精度向上の面では限界があった。
【0006】
本発明は、このような事情に鑑みて為されたものであり、2つの圧力センサにそれぞれの目的に応じた異なる検知レンジを設定することで、装置全体としての検知精度を向上させる車両衝突検知装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するためになされた請求項1に記載の発明は、車両に搭載され、チャンバ空間が内部に形成され且つ呼吸孔を有するチャンバ部材と、チャンバ空間の圧力を検出する第一圧力センサと、チャンバ空間の圧力を検出する第二圧力センサと、第一圧力センサの検知信号に基づいて車両への衝突を判別する第一判別部と、第二圧力センサの検知信号に基づいて車両への衝突を判別する第二判別部と、第一判別部及び第二判別部の判別結果に基づいて車両への衝突情報を外部に送信する送信部と、を備え、第二判別部の検知レンジの大きさは、第一判別部の検知レンジの大きさと異なることを特徴とする。
【0008】
この構成によれば、2つの圧力センサに対して異なる検知レンジが設定されているため、各判別部がそれぞれに個別の衝突判別(例えば判別対象を異にする)を行い、当該別個の判別結果に基づいて最終的な衝突判別を行うことができる。つまり、2つの圧力センサに対し異なる目的・判別対象を設定でき、それぞれに適した別個の衝突判別が可能であるため、各判別部における判別精度は向上し、2つの判別結果に基づいて出される衝突判別、すなわち装置全体としての衝突検知の精度は向上する。なお、検知レンジとは、機器(演算装置等)が処理するためのセンサ出力信号の最大値と最小値の差などを意味する。
【0009】
請求項2に記載の発明は、第一判別部が、第一圧力センサの検知信号に基づいて、外気圧による圧力変化及び衝突による圧力上昇値を算出し、第二判別部は、検知レンジが第一判別部より小さく、第二圧力センサの検知信号に基づいて、衝突による圧力上昇値を算出することを特徴とする。
【0010】
この構成によれば、第二判別部は、検知レンジのほぼ全てを衝突による圧力上昇値の算出に用いることができるため、衝突による圧力上昇値に対するノイズの大きさを相対的に小さくする(すなわち、S/N比を向上させる)ことができ、圧力上昇値が少ない衝突判別対象に対して、より高精度な衝突判別ができる。なお、第一判別部の検知レンジは、衝突による圧力変化に加え、外気圧による圧力変化を包含し、車両が走行している標高も算出できる。なお、ノイズ信号の例としては、AD変換誤差やセンサ検知信号の増幅後の電気ノイズなどが挙げられる。
【0011】
請求項3に記載の発明は、第一圧力センサは、チャンバ空間の絶対圧を検出し、第二圧力センサは、外気圧に対するチャンバ空間の相対圧を検出することを特徴とする。この構成によれば、第二圧力センサは、相対圧を検出するため、衝突による圧力上昇値のみを効果的に第二判別部に送信することができる。
【0012】
請求項4に記載の発明は、第一判別部が車両への衝突物の種類を判別し、第二判別部が車両への衝突の有無を判別することを特徴とする。この構成によれば、第二判別部は、衝突の有無のみを判別できればよく簡易な演算処理で衝突判別を実現できるため、演算負荷を抑制でき、演算用部品のコストを抑制できる。
【0013】
請求項5に記載の発明は、チャンバ部材が、車両バンパのバンパカバー内でバンパレインフォースメントの前面に配設され、判別部が、車両への歩行者の衝突を判別することを特徴とする。この構成によれば、より高精度で且つコストを抑制した歩行者衝突検知装置を実現することができる。
【図面の簡単な説明】
【0014】
【図1】車両用衝突検知装置1を平面視にて示す全体構成図である。
【図2】車両用衝突検知装置1を横から見た第一圧力センサ8を含む断面図である。
【図3】車両用衝突検知装置1を横から見た第二圧力センサ9を含む断面図である。
【図4】車両用衝突検知装置1の主構成を示す構成図である。
【図5】第一判別部11の処理フローを示す図である。
【図6】判別工程における閾値を示す模式図である。
【図7】第二判別部12の処理フローを示す図である。
【発明を実施するための形態】
【0015】
次に、実施形態を挙げ、本発明をより詳しく説明する。本実施形態では、車両用衝突検知装置を歩行者の衝突を検知する歩行者衝突検知に適用したものを例として、図1〜図7を参照して説明する。
【0016】
車両用衝突検知装置1は、図1〜図3に示すように、車両バンパ2内に配設されたチャンバ部材7と、第一圧力センサ8と、第二圧力センサ9と、歩行者保護装置電子制御ユニット(以下、電子制御ユニットをECUと略記する)10と、を主体として構成されている。
【0017】
車両バンパ2は、バンパカバー3、バンパレインフォースメント4、サイドメンバ5、アブソーバ6、及び、チャンバ部材7を主体として構成されている。
【0018】
バンパカバー3は、車両前端にて車幅方向(左右方向)に延び、バンパレインフォースメント4、アブソーバ6、及びチャンバ部材7を覆うように車体に取り付けられる樹脂(例えば、ポリプロピレン)製カバー部材である。
【0019】
バンパレインフォースメント4は、バンパカバー3内に配設されて車幅方向に延びる金属製の構造部材であって、図2に示すように、内部中央に梁が設けられた中空部材である。
【0020】
サイドメンバ5は、車両の左右両側に位置して車両前後方向に延びる一対の金属製部材であり、その前端に上述したバンパレインフォースメント4が取り付けられる。
【0021】
アブソーバ6は、バンパカバー3内でバンパレインフォースメント4の前面4aの下方側に取り付けられる車幅方向に延びる発泡樹脂製部材であり、車両バンパ2における衝撃吸収作用を発揮する。
【0022】
チャンバ部材7は、バンパカバー3内でバンパレインフォースメント前面4aの上方側に配置され、ポリエチレンなどの軟質樹脂からなる車幅方向に延びる略箱状の中空部材である。チャンバ部材7の後端部には下方へ延設された舌状片7bが設けられ、チャンバ部材7は、その舌状片7bを介してリベット止め等によってバンパレインフォースメント前面4aに対して固定される。より詳細には、チャンバ部材7は、本体部71と、2つの延設部72、73とを備えている。
【0023】
本体部71は、チャンバ部材7の大部分を占めており、車幅方向に延びて内部に厚さ数mmの軟質樹脂の壁面によって囲まれた略密閉状のチャンバ空間7aを形成している。本体部71は、底面に僅かに開口した呼吸孔71aを有している。呼吸孔71aは、外部とチャンバ空間7aを連通させており、呼吸によりチャンバ空間7aの圧力を外気圧に合わせることができる。つまり、チャンバ空間7aの圧力(絶対圧)は、外気圧が変化することでも変化する。本体部71は、衝突により変形する部位であり、本体部71内の圧力変化がチャンバ空間7aの圧力変化として検出される。本体部71がチャンバ部材7の機能を発揮する本質的部分である。
【0024】
延設部72は、図1及び図2に示すように、軟質樹脂によって本体部71と一体的に成形され、本体部71の車幅方向の略中央部分からバンパレインフォースメント上面4bの上方に延び、車体前方側から車体後方側へ延設された部位である。延設部71aの内部空間は、本体部71の内部空間と連通しており、チャンバ空間7aの一部分を形成している。また、延設部72の上部には、内部空間(すなわち、チャンバ空間7a)を外部に連通させる差込口72aが設けられている。
【0025】
もう一方の延設部73は、図1及び図3に示すように、上記延設部72と同構成であって、差込口73aを有している。延設部73は、延設部72と離間して形成されている。
【0026】
第一圧力センサ8は、気体圧力を検出可能なセンサ装置であり、チャンバ部材7に組付けられてチャンバ空間7a内の圧力上昇値を検出可能に構成されている。詳細には、第一圧力センサ8は、図2に示すように、センサ本体81と、圧力導入管82と、を備えている。
【0027】
センサ本体81は、チャンバ部材7の外部にあって、圧力検出用のセンサ素子等を収容した部位である。本実施形態では、圧力検出用のセンサ素子として一般的なピエゾ素子(圧電素子)811を用いており、チャンバ空間7aの絶対圧を検出する。ここでの絶対圧は、真空に対する相対圧であり、ピエゾ素子811における後述する基準空間Aは、真空となっている。センサ本体81は、圧力に比例した電圧信号を出力し、信号線10aを介して歩行者保護装置ECU10へ信号送信する。
【0028】
圧力導入管82は、チャンバ空間7aの圧力をセンサ本体81に導入する略円筒状の管であり、センサ本体81から下方に伸びている。圧力導入管82は、チャンバ部材7の延設部72に設けられた差込口72aに差し込まれている。センサ本体81は、圧力導入管82を介してチャンバ空間7aの圧力を検出する。
【0029】
第二圧力センサ9は、延設部73に設置され、図3に示すように、センサ本体91と、圧力導入管92と、外圧導入管93と、を有している。センサ本体91は、センサ基板部911と、収容部912と、を有している。ピエゾ素子911は、収容部912の内部に配置される。ピエゾ素子911は、圧力検出の基準となる圧力をもつ基準空間Aを有している。ピエゾ素子911は、基準空間Aの圧力に対する素子外部の圧力を検出している。ピエゾ素子911は、基準空間Aを裏面側に開放する貫通孔Bを有している。
【0030】
収容部912は、内部に空間を形成し、当該内部空間は、圧力導入管92によりチャンバ空間7aと連通している。この構成は、第一圧力センサ8と同様の構成である。ここで、第二圧力センサ9においては、収容部912が、ピエゾ素子911の裏面が設置された壁面に、貫通孔Bに対応した貫通孔Cを有している。
【0031】
外圧導入管93は、一端が外部に開口し、他端が貫通孔Cに連通した導入路を有する管である。つまり、外圧導入管93は、センサ本体91に接続され、外部と貫通孔Cとを連通させている。これにより、ピエゾ素子911の基準空間Aは、貫通孔B、貫通孔C、及び外圧導入管93を介して、外部と連通している。つまり、ピエゾ素子911の基準となる圧力は、外気圧となる。ピエゾ素子911は、外気圧に対するチャンバ空間7aの圧力、すなわち相対圧を検出する。センサ本体91は、圧力に比例した電圧信号を出力し、信号線10aを介して歩行者保護装置ECU10へ信号送信する。
【0032】
なお、第一圧力センサ8は延設部72に、第二圧力センサ9は延設部73に、それぞれブランケット等(図示せず)により固定されている。
【0033】
歩行者保護装置ECU10は、図示しない歩行者保護装置(たとえば公知の歩行者保護用のエアバッグやフード跳ね上げ装置など)の起動制御を行うための電子制御装置であり、圧力センサ8、9から出力される信号が伝送線10aを介して入力されるように構成されている。歩行者保護装置ECU10は、両圧力センサ8、9における圧力検知信号に基づいて、車両バンパ2へ歩行者(すなわち、人体)が衝突したか否かを判別する処理を実行する。具体的に、歩行者保護装置ECU10は、図4に示すように、主に、第一判別部11と、第二判別部12と、送信部13と、を備えている。
【0034】
第一判別部11は、第一圧力センサ8からの出力信号を受信し、当該検知信号に基づいて衝突を判別するものである。具体的に、第一判別部11は、CPU(中央処理演算装置)を有する演算処理装置であって、CPUの性能に応じた所定の検知レンジを有している。第一判別部11は、設定されたプログラムに基づき以下の工程を実行する。
【0035】
まず、第一判別部11は、図5に示すように、検知レンジ内における第一圧力センサの出力信号を低周波成分と高周波成分とに分離する(S101:周波数分離工程)。この工程では、ローパスフィルタ及びハイパスフィルタが用いられる。続いて、第一判別部11は、分離された低周波成分に基づいて、車両が現在走行している標高(標高値)を算出する(S102:標高値算出工程)。外気圧の変化による圧力変化は、比較的緩やかな変化であるため、検知レンジ内の低周波成分を見ることで算出でき、外気圧から標高値が算出できる。
【0036】
続いて、第一判別部11は、標高値に基づいて、衝突判別の基準である閾値を補正する(S103:補正工程)。本実施形態において、この補正は、予め設定された補正値マップ(標高値ごとの補正値を記憶したデータ)に基づいて行われる。なお、補正対象は、高周波成分の増幅度でもよい。
【0037】
一方、第一判別部11は、分離された高周波成分に基づいて、衝突に起因して上昇する圧力値を算出する(S104:圧力値算出工程)。衝突による圧力変化は、瞬間的なものであり、検知レンジ内の高周波成分を見ることで算出できる。衝突があった場合、圧力値は上昇する。つまり、衝突時には、圧力値算出工程において、衝突により上昇した圧力値(圧力上昇値)が算出される。
【0038】
続いて、第一判別部11は、圧力値算出工程で算出された圧力上昇値(圧力値)と閾値とを比較し、圧力上昇値が閾値を超えた場合、歩行者が衝突したと判別する(S105:判別工程)。閾値は、後述する第二判別部12の閾値よりも大きく設定されており、コーン等に対する衝突などの小さな衝突は検知せず、歩行者との衝突以上の衝突を検知する。
【0039】
例えば、第一判別部11は、図6に示すように、検知レンジが大きいため閾値を大きく設定できる。図6の縦軸はS/N比である。なお、検知レンジは、CPUが処理できる信号の最大S/N比と最小S/N比で決まるものであり、ここでは、その最大S/N比と最小S/N比の差の大きさを意味する。検知信号のノイズに対する大きさが大きくなるほど、S/N比は大きくなる。つまり、衝突検知は、圧力上昇によるS/N比の上昇が閾値を超えるか否かによって行われる。
【0040】
第一判別部11は、ノイズや路側帯の障害物に対する衝突に対しても、S/N比が閾値を超えず、「衝突無し」と判別する。そして、第一判別部11は、歩行者が衝突した場合、S/N比の上昇が大きく、閾値を超えるため、「衝突有」と判別する。つまり、第一判別部11は、衝突物の種類を判別し、歩行者との衝突を検知する。
【0041】
第一判別部11は、後述する送信部13に判別情報を送信する(S106:送信工程)。第一判別部11は、検知レンジが大きく、検知信号の高周波成分と低周波成分とを分離することで、標高と衝突の両情報を算出することができる。
【0042】
一方、第二判別部12は、第二圧力センサ9からの出力信号を受信し、当該検知信号に基づいて衝突を判別するものである。具体的に、第二判別部12は、CPUを有する演算処理装置であって、CPUの性能は第一判別部11と比較して限定されている。つまり、第二判別部12は、検知レンジが第一判別部11より小さくなっている。第二判別部12は、設定されたプログラムに基づき以下の工程を実行する。
【0043】
第二判別部12は、図7に示すように、第二圧力センサ9からの出力信号に基づいて、圧力値を算出する(S201:圧力値算出工程)。第二圧力センサ9は、上記構成から、チャンバ空間7aの外気圧に対する相対圧を検出するため、出力信号に「外気圧による圧力変化」の成分が含まれていない。したがって、衝突によるチャンバ空間7aの圧力上昇のみを効果的に検出することができる。例えば、図6に示すように、ノイズがあったとしても、その大きさは、検知レンジ全体に対する大きさであるため相対的に小さくなる。
【0044】
第二判別部12は、周波数分離をすることなく、検知信号から直接、衝突による圧力上昇値を算出できる。さらに、第二判別部12は、すべての検知レンジを使用して衝突検知が可能となる。
【0045】
続いて、第二判別部12は、圧力値算出工程で算出された圧力上昇値(圧力値)と閾値とを比較し、圧力上昇値が閾値を超えた場合、「衝突有」と判別する(S202:判別工程)。図6に示すように、第二判別部12における閾値は、第一判別部11より低くなっており、衝突の有無のみを検知できる。そして、第二判別部12は、判別情報を送信部13に送信する(S203:送信工程)。
【0046】
送信部13は、第一判別部11及び第二判別部12からの判別情報に基づいて、衝突情報(歩行者の衝突の有無)を外部(電装機器等)に送信する。具体的に、送信部13は、両判別部11、12が「衝突有」と判別した場合に、歩行者保護装置に衝突信号(作動命令)を送信する。本実施形態において、送信部13は、論理回路のAND回路を用いて構成されている。
【0047】
このように、本実施形態の車両衝突検知装置1によれば、2つの圧力センサ8、9及び判別部11、12により、二重の衝突判別が可能となり、より高精度な衝突判別が可能となる。また、第一判別部11と第二判別部12の検知レンジが異なっているため、検知レンジが小さいほうに、安価なCPUを用いることができる。つまり、判別の二重化に伴うコスト増加を抑制することができる。例えば、第一圧力センサ8と第一判別部11とをメインセンサとし、第二圧力センサ9と安価な第二判別部12とをセーフィングセンサとして用いることができる。
【0048】
また、第二圧力センサ9は、相対圧を検出するため、衝突による圧力上昇のみを効果的に検出できる。したがって、第二判別部12は、検知レンジ全体で衝突に関する検知信号を見ることができる。つまり、本実施形態によれば、第二判別部12に高価なCPUを用いずとも、性能の低いものでも十分に且つ精度よく衝突の有無が検知できる。
【0049】
なお、車両用衝突検知装置1は、上記に限られない。例えば、車両用衝突検知装置1は、判別部11、12で実行する処理を一部圧力センサ8、9側で行う構成であってもよい。また、第一判別部11と第二判別部12は、別々のECUとして配置されてもよい。
【0050】
また、第一判別部11で実行する周波数分離工程は、ハイパスフィルタを用いずに行ってもよい。例えば、高周波成分は、ローパスフィルタ11aを介した低周波成分を、圧力センサ8の全体の出力信号から減算しても算出できる。第一判別部11は、このように演算により周波数分離を実行してもよい。
【0051】
また、車両用衝突検知装置1は、歩行者衝突検知に限られず、例えばエアバッグの展開制御(エアバッグECU)に係る衝突検知に用いられてもよい。
【符号の説明】
【0052】
1:車両用衝突検知装置、
2:車両バンパ、 3:バンパカバー、 4:バンパレインフォースメント、
5:サイドメンバ、 6:アブソーバ、 7:チャンバ部材、
8:第一圧力センサ、 9:第二圧力センサ、 10:歩行者保護装置ECU、
11:第一判別部、 12:第二判別部、 13:送信部
【特許請求の範囲】
【請求項1】
車両に搭載され、チャンバ空間が内部に形成され且つ呼吸孔を有するチャンバ部材と、
前記チャンバ空間の圧力を検出する第一圧力センサと、
前記チャンバ空間の圧力を検出する第二圧力センサと、
前記第一圧力センサの検知信号に基づいて前記車両への衝突を判別する第一判別部と、
前記第二圧力センサの検知信号に基づいて前記車両への衝突を判別する第二判別部と、
前記第一判別部及び前記第二判別部の判別結果に基づいて前記車両への衝突情報を外部に送信する送信部と、
を備え、
前記第二判別部の検知レンジの大きさは、前記第一判別部の検知レンジの大きさと異なることを特徴とする車両用衝突検知装置。
【請求項2】
前記第一判別部は、前記第一圧力センサの検知信号に基づいて、外気圧による圧力変化及び衝突による圧力上昇値を算出し、
前記第二判別部は、検知レンジが前記第一判別部より小さく、前記第二圧力センサの検知信号に基づいて、衝突による圧力上昇値を算出する請求項1に記載の車両用衝突検知装置。
【請求項3】
前記第一圧力センサは、前記チャンバ空間の絶対圧を検出し、
前記第二圧力センサは、外気圧に対する前記チャンバ空間の相対圧を検出する請求項1又は2に記載の車両用衝突検知装置。
【請求項4】
前記第一判別部は、前記車両への衝突物の種類を判別し、
前記第二判別部は、前記車両への衝突の有無を判別する請求項1〜3の何れか一項に記載の車両用衝突検知装置。
【請求項5】
前記チャンバ部材は、車両バンパのバンパカバー内でバンパレインフォースメントの前面に配設され、
前記判別部は、前記車両への歩行者の衝突を判別する請求項1〜4の何れか一項に記載の車両用衝突検知装置。
【請求項1】
車両に搭載され、チャンバ空間が内部に形成され且つ呼吸孔を有するチャンバ部材と、
前記チャンバ空間の圧力を検出する第一圧力センサと、
前記チャンバ空間の圧力を検出する第二圧力センサと、
前記第一圧力センサの検知信号に基づいて前記車両への衝突を判別する第一判別部と、
前記第二圧力センサの検知信号に基づいて前記車両への衝突を判別する第二判別部と、
前記第一判別部及び前記第二判別部の判別結果に基づいて前記車両への衝突情報を外部に送信する送信部と、
を備え、
前記第二判別部の検知レンジの大きさは、前記第一判別部の検知レンジの大きさと異なることを特徴とする車両用衝突検知装置。
【請求項2】
前記第一判別部は、前記第一圧力センサの検知信号に基づいて、外気圧による圧力変化及び衝突による圧力上昇値を算出し、
前記第二判別部は、検知レンジが前記第一判別部より小さく、前記第二圧力センサの検知信号に基づいて、衝突による圧力上昇値を算出する請求項1に記載の車両用衝突検知装置。
【請求項3】
前記第一圧力センサは、前記チャンバ空間の絶対圧を検出し、
前記第二圧力センサは、外気圧に対する前記チャンバ空間の相対圧を検出する請求項1又は2に記載の車両用衝突検知装置。
【請求項4】
前記第一判別部は、前記車両への衝突物の種類を判別し、
前記第二判別部は、前記車両への衝突の有無を判別する請求項1〜3の何れか一項に記載の車両用衝突検知装置。
【請求項5】
前記チャンバ部材は、車両バンパのバンパカバー内でバンパレインフォースメントの前面に配設され、
前記判別部は、前記車両への歩行者の衝突を判別する請求項1〜4の何れか一項に記載の車両用衝突検知装置。
【図1】


【図2】
【図3】

【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−96562(P2012−96562A)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願番号】特願2010−243285(P2010−243285)
【出願日】平成22年10月29日(2010.10.29)
【出願人】(000004260)株式会社デンソー (27,639)
【公開日】平成24年5月24日(2012.5.24)
【国際特許分類】
【出願日】平成22年10月29日(2010.10.29)
【出願人】(000004260)株式会社デンソー (27,639)
[ Back to top ]