
車両用表示装置
【課題】各車輪の応答性能の見落としを抑制することで、走行中における安全性を高める。
【解決手段】本発明に係る車両用表示装置10は、車両100の走行状態を制御する走行制御基板110の制御処理に基づいて、車両100の走行状態を表示するものであって、車両100を表す車両モデル11と、車両100の車輪を表す車輪モデル13,14,15,16と、が表示される。そして、車両用表示装置10は、車輪の駆動状態の異変に応じて車輪モデル13,14,15,16の表示色を変えて表示し、異変状態が所定の時間経過後まで表示される。
【解決手段】本発明に係る車両用表示装置10は、車両100の走行状態を制御する走行制御基板110の制御処理に基づいて、車両100の走行状態を表示するものであって、車両100を表す車両モデル11と、車両100の車輪を表す車輪モデル13,14,15,16と、が表示される。そして、車両用表示装置10は、車輪の駆動状態の異変に応じて車輪モデル13,14,15,16の表示色を変えて表示し、異変状態が所定の時間経過後まで表示される。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用表示装置に関し、特に、乗員に車両の走行制御手段による情報を報知することが可能な車両用表示装置に関する。
【背景技術】
【0002】
従来、乗員に車両の走行制御手段による情報を報知することが可能な車両用表示装置として、例えば、特許文献1には、運転状態に応じて変更したトルク配分の状態を視覚的に表示することが可能な4輪駆動車のトルク配分表示装置が開示されている。
【0003】
また、特許文献2にも、上記特許文献1と同様に、固定目盛部内内で可動表示バーを移動させ、この可動表示バーの移動位置によりトルク配分率を視覚的に表示することが可能な車両用駆動力表示装置が開示されている。
【0004】
また、特許文献3には、各駆動車輪を象った表示輪郭にバーグラフ状に配列された複数の表示セグメントを有し、この表示セグメントに各駆動車輪に発生している駆動トルクに応じた位置まで点灯させる4輪駆動型車両のトルク表示装置が開示されている。
【0005】
また、特許文献4には、車両の運転状態が2輪駆動であるのか、或いは4輪駆動であるのか、すなわち、各車輪の駆動状態を表示する表示手段を備えたハイブリット車の運転状態表示装置が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開昭61−244627号公報
【特許文献2】特開昭62−039715号公報
【特許文献3】実開昭63−42435号公報
【特許文献4】特開2002−247706号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、上記特許文献1乃至3では、上述したように、トルク配分の状態を視覚的に表示させることで、運転者に迅速に、かつ正確にトルク配分比を知らせることが可能になる。しかしながら、上記特許文献1乃至3では、路面に対する各車輪の応答性能を表示させるものではないため、運転者に安心感を与え、走行時における安全性を高めるという点では改善の余地がある。
【0008】
また、上記特許文献4では、上述したように、各車輪の駆動状態を表示することで、各車両の駆動状態を把握させることが可能になる。しかしながら、上記特許文献4では、路面に対する各車輪の応答性能を表示させるものではないため、運転者に安心感を与え、走行時における安全性を高めるとう点では改善の余地がある。
【0009】
本発明の目的は、上記従来の実状に鑑みて、各車輪の応答性能の見落としを抑制することで、走行中における安全性を高めることが可能な車両用表示装置を提供することにある。
【0010】
本発明の他の目的は、上記従来の実状に鑑みて、路面に対する各車輪の応答性能を運転者に瞬時に把握させることで、運転者に安心感を与え、走行中における安全性を高めることが可能な車両用表示装置を提供することにある。
【課題を解決するための手段】
【0011】
このような課題を解決するために、本発明に係る車両用表示装置は、車両の走行状態を制御する制御手段に基づいて、上記走行状態を表示するものであって、上記車両を表す車両モデルと、上記車両の車輪を表す車輪モデルと、上記車輪の駆動状態の異変に応じて当該異変状態を表す異変状態モデルと、上記異変状態を所定の時間経過後まで表す異変状態履歴モデルと、が表示される。
【0012】
好適には、上記解決手段に加えて、車両用表示装置に表示される上記車両モデル、上記車輪モデル、上記異変状態モデル及び上記異変状態履歴モデルの他に、上記車両用表示装置には、上記車輪の駆動状態を表す駆動状態モデルが表示される。
【0013】
好適には、上記解決手段に加えて、車両用表示装置の上記異変状態モデルは、上記車輪の駆動状態の異変レベルに応じて異なる表示態様で表示される。
【0014】
好適には、上記解決手段に加えて、車両用表示装置の上記車輪モデルは、上記車輪の舵角に連動して表示される。
【発明の効果】
【0015】
本発明の車両用表示装置によれば、各車輪の応答性能の見落としを抑制するとともに、路面に対する各車輪の応答性能を運転者に瞬時に把握させることで、走行中における安全性を高めることできる。
【図面の簡単な説明】
【0016】
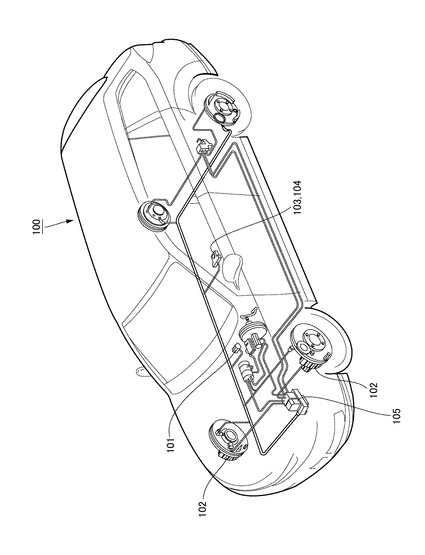
【図1】本発明の一実施の形態である車両用表示装置を適用した車両における車両用走行制御装置の概略構成を模式的に示し、この車両用走行制御装置を車両左前方側から目視した状態を示す斜視図である。
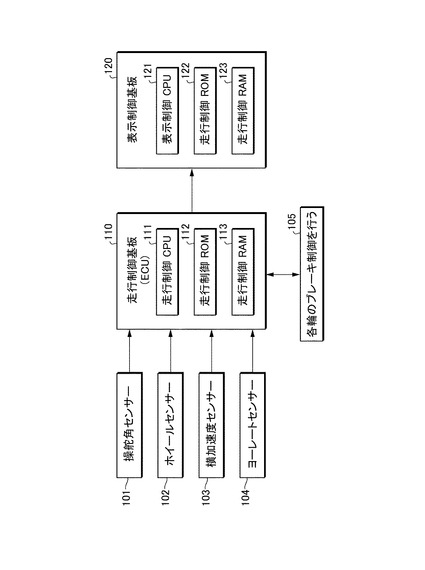
【図2】本発明の一実施の形態である車両用表示装置を適用した車両における車両用走行制御装置のブロック図である。
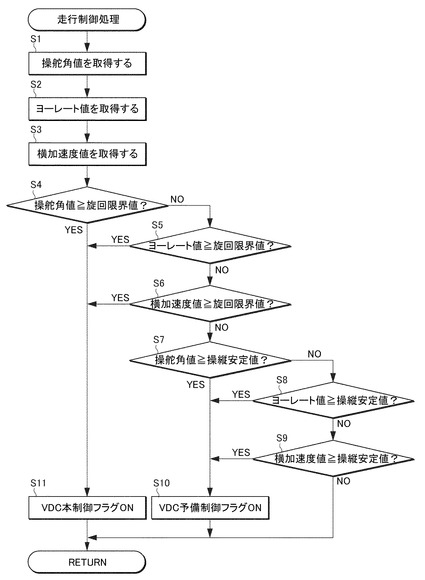
【図3】本発明の一実施の形態である車両用走行制御装置の走行制御処理を示すフローチャートである。
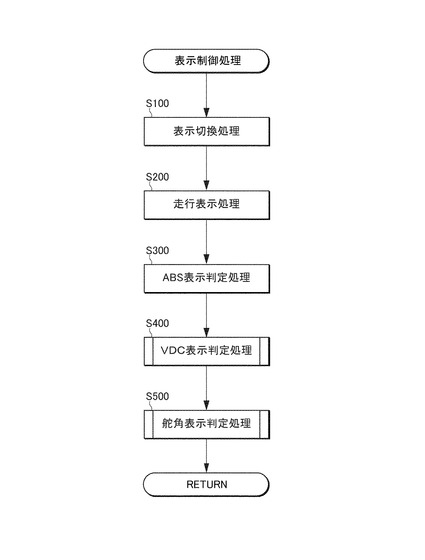
【図4】本発明の一実施の形態である車両用走行制御装置の表示制御処理を示すフローチャートである。
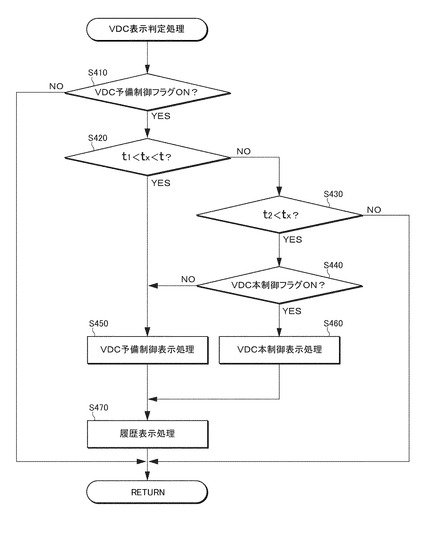
【図5】本発明の一実施の形態である車両用走行制御装置の表示制御処理におけるVDC表示判定処理を示すフローチャートである。
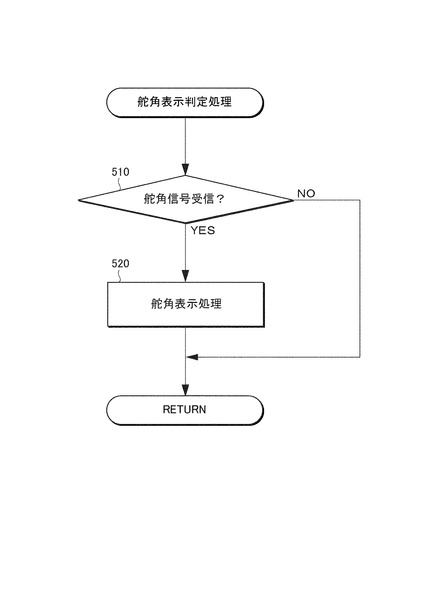
【図6】本発明の一実施の形態である車両用走行制御装置の表示制御処理における舵角表示処理を示すフローチャートである。
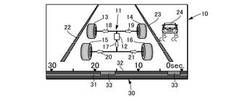
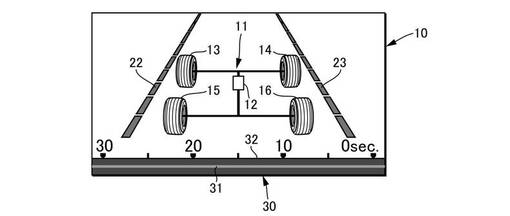
【図7A】本発明の一実施の形態である車両用表示装置を模式的に示し、この車両用表示装置の表示態様における第1態様を示す図である。
【図7B】本発明の一実施の形態である車両用表示装置を模式的に示し、この車両用表示装置の表示態様における第2態様を示す図である。
【図7C】本発明の一実施の形態である車両用表示装置を模式的に示し、この車両用表示装置の表示態様における第3態様を示す図である。
【図7D】本発明の一実施の形態である車両用表示装置を模式的に示し、この車両用表示装置の表示態様における第4態様を示す図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施の形態である車両用表示装置について、図を用いて説明する。まず、本発明の実施の形態である車両用表示装置を適用した車両の車両用走行制御ユニットの構成について、図1及び図2を用いて説明する。
【0018】
図1は、本発明の一実施の形態である車両用表示装置10を適用した車両100における車両用走行制御ユニットの概略構成を模式的に示し、この車両用走行制御ユニットを車両左前方側から目視した状態を示す斜視図であり、図2は、本発明の一実施の形態である車両用表示装置10を適用した車両100における車両用走行制御ユニットのブロック図である。
【0019】
図1及び図2に例示されるように、本実施の形態の車両100には、この車両100の運転状態を制御する車両用走行制御ユニットが搭載されている。この車両用走行制御ユニットは、主に、車両100の走行中における横滑りを防止する役目を果たし、例えば、VDC(Vehicle Dynamic Control)システムを用いて構成されている。
【0020】
この車両用走行制御ユニットは、この車両用走行制御ユニットの制御部である走行制御基板110を備えて構成されている。この走行制御基板110は、走行制御CPU111、走行制御ROM112及び走行制御RAM113を有して構成されている。
【0021】
そして、走行制御基板110は、走行制御CPU111により走行制御ROM112に記憶されている制御プログラムに従い、操舵角センサ101、ホイールセンサ102、横加速度センサ103及びヨーレートセンサ104等の各センサからの検出信号を受信し、走行制御RAM113に格納されている各種データに基づき、エンジン制御、ブレーキ制御等を行っている。
【0022】
本実施の形態において、走行制御基板110の入力側には、運転者により図示しないステアリング操作の操舵角を検出する操舵角センサ101と、車輪の回転速度を検出するホイールセンサ102と、車両100の横加速度を検出する横加速度センサ103と、車両100の回転を検出するヨーレートセンサと、が接続されている。
【0023】
これら操舵角センサ101、ホイールセンサ102、横加速度センサ103及びヨーレートセンサ104は、周知のものであるのでその説明を省略する。
【0024】
一方、走行制御基板110の出力側には、ハイドローリックユニット105が接続されている。このハイドローリックユニット105は、車両100の各車輪に併設されているブレーキホイールシリンダに対し、ブレーキ油圧を強制的に供給する役目を果たしている。すなわち、ハイドローリックユニット105は、各ブレーキホイールシリンダにブレーキ油圧を供給し、各車輪の回転速度を調整している。
【0025】
本実施の形態において、走行制御基板110の出力側には、この走行制御基板110で処理した情報を乗員に報知する報知手段である車両用表示装置10の表示制御を行う表示制御基板120が接続されている。
【0026】
(走行制御処理)
次に、本実施の形態の車両用走行制御ユニットの処理手順について、図3を用いて説明する。図3は、本発明の一実施の形態である車両用走行制御ユニットの走行制御処理を示すフローチャートである。
【0027】
この処理において、走行制御基板110では、図示しないステアリングの操舵角値、車両100のヨーレート値及び車両100の横加速度(左右方向加速度)値の旋回限界値が走行制御基板ROM112に記憶されている。
【0028】
また、この処理において、走行制御基板110では、旋回限界値と同様に、図示しないステアリングの操舵角値、車両100のヨーレート値及び車両100の横加速度(左右方向加速度)の操縦安定値が走行制御基板ROM112に記憶されている。
【0029】
なお、旋回限界値とは、車輪のキャンバ角が傾いている状態で車両100が走行(旋回または直進)した場合に、車両100が横滑りする恐れがあると判断される操舵角値、ヨーレート値及び横加速度値の限界値として設定された値である。
【0030】
一方、操縦安定値とは、車輪のキャンバ角が傾いている状態で車両100が走行(旋回または直進)した場合に、車両100の走行に影響を与えると判断される操舵角値、ヨーレート値及び横加速度値の限界値として設定された値である。ここで、旋回限界値と操縦安定値とは、旋回限界値の方が操縦安定値よりも大きい値で設定されている。
【0031】
ステップS1において、走行制御基板CPU111は、ステアリングの操舵角値を取得する。なお、この操舵角値は、車両100の操舵角センサにより取得している。
【0032】
ステップS2において、走行制御基板CPU111は、ヨーレート値を取得する。なお、このヨーレート値は、車両100のヨーレートセンサにより取得している。
【0033】
ステップS3において、走行制御基板CPU111は、横加速度値を取得する。なお、この横加速度値は、横加速度センサにより取得している。
【0034】
ステップS4において、走行制御基板CPU111は、上記ステップS1で取得したステアリングの操舵角値が旋回限界値以上であるか否かの判定を行う。この処理において、走行制御基板CPU111は、ステアリングの操舵角値が旋回限界値以上であると判定した場合には、ステップS11に処理を移す。
【0035】
一方、この処理において、走行制御基板CPU111は、ステアリングの操舵角値が旋回限界値以上ではない、すなわち、以下であると判定した場合には、ステップS5に処理を移す。
【0036】
ステップS5において、走行制御基板CPU111は、上記ステップS2で取得したヨーレート値が旋回限界値以上であるか否かを判定する。この処理において、走行制御基板CPUは、ヨーレート値が旋回限界値以上であると判定した場合には、ステップS11に処理を移す。
【0037】
一方、この処理において、走行制御基板CPU111は、ヨーレート値が旋回限界値以上でない、すなわち、以下であると判定した場合には、ステップS6に処理を移す。
【0038】
ステップS6において、走行制御基板CPU111は、上記ステップS3で取得した横加速度値が旋回限界値以上であるか否かを判定する。この処理において、走行制御基板CPUは、横加速度値が旋回限界値以上であると判定した場合には、ステップS11に処理を移す。
【0039】
一方、この処理において、走行制御基板CPU111は、横加速度値が旋回限界値以上でない、すなわち、以下であると判定した場合には、ステップS7に処理を移す。
【0040】
ステップS7において、走行制御基板CPU111は、上記ステップS1で取得したステアリングの操舵角値が操縦安定値以上であるか否かの判定を行う。この処理において、走行制御基板CPU111は、ステアリングの操舵角値が操縦安定値以上であると判定した場合には、ステップS10に処理を移す。
【0041】
一方、この処理において、走行制御基板CPU111は、ステアリングの操舵角値が操縦安定値以上ではない、すなわち、以下であると判定した場合には、ステップS8に処理を移す。
【0042】
ステップS8において、走行制御基板CPU111は、上記ステップS2で取得したヨーレート値が操縦安定値以上であるか否かを判定する。この処理において、走行制御基板CPU111は、ヨーレート値が操縦安定値以上であると判定した場合には、ステップS10に処理を移す。
【0043】
一方、この処理において、走行制御基板CPU111は、ヨーレート値が操縦安定値以上でない、すなわち、以下であると判定した場合には、ステップS9に処理を移す。
【0044】
ステップS9において、走行制御基板CPU111は、上記ステップS3で取得した横加速度値が操縦安定値以上であるか否かを判定する。この処理において、走行制御基板CPU111は、横加速度値が操縦安定値以上であると判定した場合には、ステップS10に処理を移す。
【0045】
一方、この処理において、走行制御基板CPU111は、横加速度値が操縦安定値以上でない、すなわち、以下であると判定した場合には、この走行制御処理を終了する。
【0046】
すなわち、本実施の形態において、走行制御基板CPU111は、操舵角値、ヨーレート値及び横加速度値が旋回限界値よりも小さく、かつ、操縦安定値よりも小さい場合には、この走行制御処理を終了する。
【0047】
ステップS10において、走行制御基板CPU111は、上記ステップS7からステップS9で操舵角値、ヨーレート値及び横加速度値の何れかが操縦安定値以上であると判定した場合には、VDC予備制御フラグをオンにする。
【0048】
ステップS11において、走行制御基板CPU111は、上記ステップS4からステップS6で操舵角値、ヨーレート値及び横加速度値の何れかが旋回限界値以上であると判定した場合には、VDC本制御フラグをオンにする。
【0049】
このように、本実施の形態の走行制御基板CPU111は、ステアリングの操作角値、車両100のヨーレート値及び車両100の横加速度値が旋回限界値以下で、かつ、ステアリングの操舵角値、車両100のヨーレート値及び車両100の横加速度値の何れかが操縦安定値以上である場合には、VDC予備制御フラグをオンにしている。
【0050】
また、本実施の形態の走行制御基板CPU111は、ステアリングの操作量、車両100のヨーレート値及び車両100の横加速度値の何れかが旋回限界値以上である場合には、VDC本制御フラグをオンにしている。
【0051】
これにより、本実施の形態の走行制御基板110は、例えば、ステアリングの操舵角値が旋回限界値よりも小さいが、走行する路面の摩擦係数が低く、これに起因して車両100に横滑りが発生するような場合、車両100のヨーレート値が旋回限界値以上であるかを判断しているため、車両100の横滑りを抑制することができる。
【0052】
また、本実施の形態の走行制御基板110は、例えば、車両100が直進走行状態にあり、ステアリングの操舵角値及びヨーレート値が旋回限界値よりも小さいが、トンネルを抜ける際に横風を受けた場合のように、外乱の影響で車両100の挙動が不安定となる場合であっても、車両100の横加速度値が旋回限界値以上であるかを判断しているため、操縦安定性を確保することができる。
【0053】
(表示制御処理)
以下、本実施の形態の走行制御基板110に基づいた車両用表示装置10の表示制御基板120の処理手順について、図4乃至図6を用いて説明する。図4は、本発明の一実施の形態である車両用走行制御ユニットの表示制御処理を示すフローチャートである。
【0054】
図5は、本発明の一実施の形態である車両用走行制御ユニットの表示制御処理におけるVDC表示判定処理を示すフローチャートであり、図6は、本発明の一実施の形態である車両用走行制御ユニットの表示制御処理における舵角表示処理を示すフローチャートである。
【0055】
ステップS100において、表示制御CPU121は、走行制御基板110から受信したコマンドに基づいて表示切換処理を行う。この処理において、表示制御CPU121は、車両100の駆動方式の表示切換処理を行う。
【0056】
すなわち、この処理において、表示制御CPU121は、車両100の駆動方式が4WDである場合には、車両用表示装置10に表示される車両モデル11の左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15、右後方車輪モデル16の夫々に、駆動源モデル12からの伝達状況を指し示す後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を表示する表示態様に切り換える。
【0057】
また、この処理において、表示制御CPU121は、車両100の駆動方式が2WDである場合には(例えば、FFの場合)、車両用表示装置10に後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を表示させない表示態様に切り換える。
【0058】
なお、この処理において、表示制御CPU121は、車両100の駆動方式が2WDである場合には、上述したように、後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を表示させない表示態様としているが、これに限定されず、例えば、FFの場合、左前方車輪矢印18及び右前方車輪矢印19を表示させる表示態様にしても良い。
【0059】
ステップS200において、表示制御CPU121は、走行制御基板110から受信したコマンドに基づいて走行表示処理を行う。この処理において、表示制御CPU121は、車両100が走行中であることを表示している。
【0060】
ここで、図7Bに例示されるように、表示制御CPU121は、上記ステップS1で切り換えた表示態様に基づき、例えば、駆動方式が4WDの場合、後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を表示させ、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を緑色に表示している。
【0061】
ステップS300において、表示制御CPU121は、走行制御基板110から受信したコマンドに基づいて、ABS表示判定処理を行う。この処理において、表示制御CPU121は、走行制御基板110から受信したコマンドに基づいて、車両100でABSが作動中である場合に、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を黄色に表示している。
【0062】
ここで、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を黄色に表示する際、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の全てではなく、ABSが作動している車輪のみ表示色を黄色に表示しても良い。
【0063】
また、この処理において、表示制御CPU121は、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を点滅させて表示している。ここで、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を点滅させる際、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21の全てではなく、ABSが作動している車輪のみ点滅させても良い。
【0064】
なお、本実施の形態において、表示制御CPU121は、表示態様の一例として、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16をABSの作動時と非作動時とで異なる色で表示させているが、これに限定されず、例えば、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16をABSの作動時には、点滅表示とし、非作動時には点灯表示としても良い。
【0065】
ステップS400において、表示制御CPUは、走行制御基板110から受信したコマンドに基づいて、VDC表示判定処理を行う。なお、このVDC表示判定処理については、図5を用いて後述する。
【0066】
ステップS500において、表示制御CPUは、走行制御基板110から受信したコマンドに基づいて、舵角表示判定処理を行う。この舵角表示判定処理については、図6を用いて後述する。
【0067】
(VDC表示処理)
ステップS410において、表示制御CPU121は、走行制御基板CPU111から受信したコマンドのうち、VDC予備制御用フラグがONであるか否かを判定する。この処理において、表示制御CPU121は、VDC予備制御用フラグがONであると判定した場合には、ステップS420に処理を移す。一方、この処理において、表示制御CPU121は、VDC予備制御用フラグがOFFであると判定した場合には、この表示基本処理を終了する。
【0068】
すなわち、図7Bに例示されるように、表示制御CPU121は、VDC予備制御用フラグがONであると判定した場合には、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を緑色に表示している。
【0069】
ステップS420において、表示制御CPU121は、VDC予備制御用フラグのON状態が所定の時間内であるか否かを判定する。この処理において、表示制御CPU121は、VDC予備制御用フラグのON状態が所定の時間内であると判定した場合には、ステップS450に処理を移す。一方、この処理において、表示制御CPU121は、VDC予備制御用フラグのON状態が所定の時間内でないと判定した場合には、ステップS430に処理を移す。
【0070】
ステップS430において、表示制御CPU121は、VDC予備制御用フラグのON状態が所定の時間よりも長時間であるか否かを判定する。この処理において、表示制御CPU121は、VDC予備制御用フラグのON状態が所定の時間よりも長時間である場合には、ステップS440に処理を移す。
【0071】
一方、この処理において、表示制御CPU121は、VDC予備制御用フラグのON状態が所定の時間よりも長時間ではない、すなわち、上記ステップS420で所定の時間内ではないと判定しているため、短時間である場合には、この基本表示処理を終了する。
【0072】
すなわち、この処理において、表示制御CPU121は、VDC予備制御用フラグがONであったとしても、VDC予備制御用フラグのON状態の時間が所定の時間よりも短時間である場合には、図7Bに例示されるように、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を緑色に表示している。
【0073】
このように、本実施の形態の車両用表示装置10は、必要以上にVDC作動状態を表示することなく、走行中における安心感を高めることが可能になり、走行中における安全性を高めることができる。
【0074】
また、本実施の形態の車両用表示装置10は、例えば、VDCの誤作動によりフラグが立ってしまったとしても、上述したように、必要以上にVDC作動状態を表示していないため、VDCの誤作動による表示を抑制することができる。
【0075】
ステップS440において、表示制御CPU121は、VDC本制御用フラグがONであるか否かを判定する。この処理において、表示制御CPU121は、VDC本制御用フラグがONであると判定した場合には、ステップS460に処理を移す。一方、この処理において、表示制御CPU121は、VDC本制御用フラグがONでないと判定した場合には、ステップS450に処理を移す。
【0076】
ステップS450において、表示制御CPU121は、VDC予備制御表示処理を行う。この処理において、表示制御CPU121は、VDC予備制御表示処理として、図7Cに例示されるように、車両用表示装置10に左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を黄色に表示している。
【0077】
このように、本実施の形態の車両用表示装置10は、車両用表示装置10に左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を変化させることで、運転者に予備的に走行状態を把握させることが可能になり、走行中における注意力を促すことが可能になり、安全性を高めることができる。
【0078】
また、この処理において、表示制御CPU121は、VDC予備制御用表示処理として、車両用表示装置10に左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を点滅させて表示している。
【0079】
ステップS460において、表示制御CPU121は、VDC本制御表示処理を行う。この処理において、表示制御CPU121は、VDC本制御表示処理として、図7Dに例示されるように、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16を点滅させるとともに、VDC本制御作動モデル24を表示させる。
【0080】
このように、本実施の形態の車両用表示装置10は、車両用表示装置10に左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16を点滅させたり、VDC本制御作動モデル24を表示しているため、運転者に瞬時に走行状態を把握させることが可能になり、安全性を高めることができる。
【0081】
ステップS470において、表示制御CPU121は、VDC予備制御表示処理及びVDC本制御表示処理の履歴表示処理を行う。この処理において、表示制御CPU121は、履歴表示処理として、図7C及び図7Dに例示されるように、表示したときから所定の時間の間、履歴表示バー33を表示している。
【0082】
このように、本実施の形態の車両用表示装置10は、VDC予備制御表示処理及びVDC本制御表示処理で処理した表示履歴を表示することで、走行中における見落としを防ぎ、事前準備を促し、安全性を高めることができる。
【0083】
(舵角表示処理)
ステップS510において、表示制御CPU121は、走行制御手段110から舵角信号を受信したか否かの判定を行う。この処理において、表示制御CPU121は、舵角信号を受信したと判定した場合には、ステップS520に処理を移す。この処理において、表示制御CPU121は、舵角信号を受信する際、舵角度値も受信している。
【0084】
一方、この処理において、表示制御CPU121は、舵角信号を受信していないと判定した場合には、この舵角表示処理を終了する。
【0085】
ステップS520において、表示制御CPUは、走行制御手段110で受信した舵角信号に基づいて車両用表示装置10の左前方車輪モデル13及び右前方車輪モデル14の舵角を表示する表示処理を行う。
【0086】
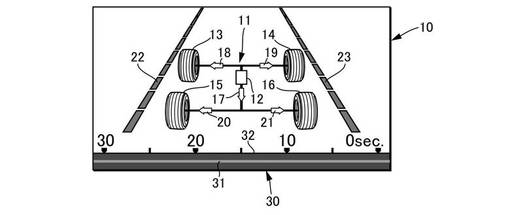
次に、本実施の形態の車両用表示装置10に表示される表示態様について、図7A、図7B、図7C及び図7Dを用いて説明する。なお、図7Aに例示される第1の表示態様は、車両100の停止状態を示している。
【0087】
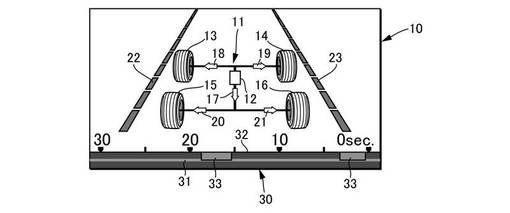
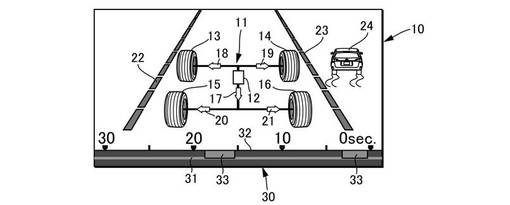
また、図7Bに例示される第2の表示態様は、車両100の走行状態を示しており、図7Cに例示される第3の表示態様は、車両100の走行状態におけるVDC予備制御が作動している状態を示しており、図7Dに例示される第4の表示態様は、車両100の走行状態におけるVDC本制御が作動している状態を示している。
【0088】
図7Aに例示されるように、車両用表示装置10の中央には、車両モデル11が表示されている。また、車両用表示装置10には、車両モデル11を構成する車両100の駆動源としてのエンジンモデル12と、車両100の車輪としての左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16が表示されている。
【0089】
また、車両用表示装置10には、車道モデルを構成する左側車道モデル22及び右側車道モデル23が表示されている。そして、これら左側車道モデル22及び右側車道モデル23は、車両100の走行中を表示する表示態様として、車両用表示装置10の上方から下方に向かって流動するように表示される。これにおり、本実施の形態の車両用表示装置10は、車両100が走行中であることを明示している。
【0090】
このように、本実施の形態の車両用表示装置10は、車道臨界線を上方から下方に向かって流動するように表示しているため、乗員に車両100の走行状態をより容易に把握させることが可能になる。
【0091】
図7Bに例示されるように、本実施の形態の車両用表示装置10には、図7Aに例示した車両モデル11、車両モデル11を構成するエンジンモデル12、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16、左側車道モデル22、右側車道モデル23の他に、駆動方式モデルとして後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21が表示されている。
【0092】
これら後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21は、車両100の駆動方式を指し示す役目を果たしている。具体的には、後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21は、車両100が4WDの場合、全て表示され、エンジンモデル12から左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16に動力が伝達している旨を表示している。
【0093】
また、後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21は、車両100が2WDの場合、全て表示されない。なお、本実施の形態の駆動方式モデルは、上述したように、2WDの場合、後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を全て表示させない表示態様としているが、これに限定されず、例えば、左前方車輪矢印18及び右前方車輪矢印19のみを表示させる表示態様としても良い。
【0094】
図7Cに例示されるように、本実施の形態の車両用表示装置10には、車両100のVDC予備制御の作動状態に関し、車両モデル11の左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を変更して表示している。
【0095】
ここで、本実施の形態の車両用表示装置10には、VDC予備制御の作動状態時の表示態様として、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を変更して表示しているが、この表示色の一例として、作動時に黄色で表示し、非作動時では緑色で表示している。
【0096】
図7Dに例示されるように、本実施の形態の車両用表示装置10には、車両100のVDC本制御の作動状態に関し、VDC本制御作動モデル24が表示されている。
【0097】
本実施の形態において、車両用表示装置10には、VDC履歴モデル30が表示されている。そして、車両用表示装置10には、このVDC履歴モデル30を構成する履歴表示領域31と、この履歴表示領域に付された時間目盛32と、履歴表示領域31内で移動可能な履歴バー33とが表示されている。
【0098】
このVDC履歴モデル30は、VDC予備制御作動時から所定の時間まで、履歴表示領域31内で履歴バー33を移動させて表示する表示態様となっている。例えば、図7C及び図7Dに例示されるように、履歴バー33が18秒を指し示す位置と、3秒を指し示す位置とに表示されている。
【0099】
すなわち、車両用表示装置10は、VDC予備制御、或いは、VDC本制御が18秒前及び3秒前に作動したことを指し示している。このため、車両用表示装置10は、VDC予備制御、或いはVDC本制御が作動していることのみならず、何秒前に作動したかを表示しているため、運転者の見落としを抑制することが可能になり、安全性を高めることができる。
【0100】
以上のように、本実施の形態の車両用表示装置10は、各車輪の応答性能の見落としを抑制することで、運転者に事前に注意を促すことが可能になり、走行中における安全性を高めることができる。
【0101】
なお、本実施の形態の車両用表示装置10は、VDCの履歴表示を可能しているが、これに限定されず、例えば、ABSの履歴表示を行うようにしても良い。このような場合、車両用表示装置10は、VDCの表示履歴情報及びABSの表示履歴情報の何れも受信した場合、何れか一方を優先して表示するように設定されている。
【符号の説明】
【0102】
10 車両用表示装置
11 車両モデル
12 駆動源モデル
13 左前方車輪モデル(車輪モデル)
14 右前方車輪モデル(車輪モデル)
15 左後方車輪モデル(車輪モデル)
16 右後方車輪モデル(車輪モデル)
17 後方車輪矢印(駆動状態モデル)
18 左前方車輪矢印(駆動状態モデル)
19 右前方車輪矢印(駆動状態モデル)
20 左後方車輪矢印(駆動状態モデル)
21 右後方車輪矢印(駆動状態モデル)
22 左側車道モデル
23 右側車道モデル
24 VDC本制御作動モデル(異変状態モデル)
30 VDC履歴モデル(異変状態履歴モデル)
31 履歴表示領域
32 時間目盛
33 履歴バー
100 車両
101 操舵角センサ
102 ホイールセンサ
103 横加速度センサ
104 ヨーレートセンサ
110 走行制御基板
120 表示制御基板
【技術分野】
【0001】
本発明は、車両用表示装置に関し、特に、乗員に車両の走行制御手段による情報を報知することが可能な車両用表示装置に関する。
【背景技術】
【0002】
従来、乗員に車両の走行制御手段による情報を報知することが可能な車両用表示装置として、例えば、特許文献1には、運転状態に応じて変更したトルク配分の状態を視覚的に表示することが可能な4輪駆動車のトルク配分表示装置が開示されている。
【0003】
また、特許文献2にも、上記特許文献1と同様に、固定目盛部内内で可動表示バーを移動させ、この可動表示バーの移動位置によりトルク配分率を視覚的に表示することが可能な車両用駆動力表示装置が開示されている。
【0004】
また、特許文献3には、各駆動車輪を象った表示輪郭にバーグラフ状に配列された複数の表示セグメントを有し、この表示セグメントに各駆動車輪に発生している駆動トルクに応じた位置まで点灯させる4輪駆動型車両のトルク表示装置が開示されている。
【0005】
また、特許文献4には、車両の運転状態が2輪駆動であるのか、或いは4輪駆動であるのか、すなわち、各車輪の駆動状態を表示する表示手段を備えたハイブリット車の運転状態表示装置が開示されている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開昭61−244627号公報
【特許文献2】特開昭62−039715号公報
【特許文献3】実開昭63−42435号公報
【特許文献4】特開2002−247706号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
ところで、上記特許文献1乃至3では、上述したように、トルク配分の状態を視覚的に表示させることで、運転者に迅速に、かつ正確にトルク配分比を知らせることが可能になる。しかしながら、上記特許文献1乃至3では、路面に対する各車輪の応答性能を表示させるものではないため、運転者に安心感を与え、走行時における安全性を高めるという点では改善の余地がある。
【0008】
また、上記特許文献4では、上述したように、各車輪の駆動状態を表示することで、各車両の駆動状態を把握させることが可能になる。しかしながら、上記特許文献4では、路面に対する各車輪の応答性能を表示させるものではないため、運転者に安心感を与え、走行時における安全性を高めるとう点では改善の余地がある。
【0009】
本発明の目的は、上記従来の実状に鑑みて、各車輪の応答性能の見落としを抑制することで、走行中における安全性を高めることが可能な車両用表示装置を提供することにある。
【0010】
本発明の他の目的は、上記従来の実状に鑑みて、路面に対する各車輪の応答性能を運転者に瞬時に把握させることで、運転者に安心感を与え、走行中における安全性を高めることが可能な車両用表示装置を提供することにある。
【課題を解決するための手段】
【0011】
このような課題を解決するために、本発明に係る車両用表示装置は、車両の走行状態を制御する制御手段に基づいて、上記走行状態を表示するものであって、上記車両を表す車両モデルと、上記車両の車輪を表す車輪モデルと、上記車輪の駆動状態の異変に応じて当該異変状態を表す異変状態モデルと、上記異変状態を所定の時間経過後まで表す異変状態履歴モデルと、が表示される。
【0012】
好適には、上記解決手段に加えて、車両用表示装置に表示される上記車両モデル、上記車輪モデル、上記異変状態モデル及び上記異変状態履歴モデルの他に、上記車両用表示装置には、上記車輪の駆動状態を表す駆動状態モデルが表示される。
【0013】
好適には、上記解決手段に加えて、車両用表示装置の上記異変状態モデルは、上記車輪の駆動状態の異変レベルに応じて異なる表示態様で表示される。
【0014】
好適には、上記解決手段に加えて、車両用表示装置の上記車輪モデルは、上記車輪の舵角に連動して表示される。
【発明の効果】
【0015】
本発明の車両用表示装置によれば、各車輪の応答性能の見落としを抑制するとともに、路面に対する各車輪の応答性能を運転者に瞬時に把握させることで、走行中における安全性を高めることできる。
【図面の簡単な説明】
【0016】
【図1】本発明の一実施の形態である車両用表示装置を適用した車両における車両用走行制御装置の概略構成を模式的に示し、この車両用走行制御装置を車両左前方側から目視した状態を示す斜視図である。
【図2】本発明の一実施の形態である車両用表示装置を適用した車両における車両用走行制御装置のブロック図である。
【図3】本発明の一実施の形態である車両用走行制御装置の走行制御処理を示すフローチャートである。
【図4】本発明の一実施の形態である車両用走行制御装置の表示制御処理を示すフローチャートである。
【図5】本発明の一実施の形態である車両用走行制御装置の表示制御処理におけるVDC表示判定処理を示すフローチャートである。
【図6】本発明の一実施の形態である車両用走行制御装置の表示制御処理における舵角表示処理を示すフローチャートである。
【図7A】本発明の一実施の形態である車両用表示装置を模式的に示し、この車両用表示装置の表示態様における第1態様を示す図である。
【図7B】本発明の一実施の形態である車両用表示装置を模式的に示し、この車両用表示装置の表示態様における第2態様を示す図である。
【図7C】本発明の一実施の形態である車両用表示装置を模式的に示し、この車両用表示装置の表示態様における第3態様を示す図である。
【図7D】本発明の一実施の形態である車両用表示装置を模式的に示し、この車両用表示装置の表示態様における第4態様を示す図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施の形態である車両用表示装置について、図を用いて説明する。まず、本発明の実施の形態である車両用表示装置を適用した車両の車両用走行制御ユニットの構成について、図1及び図2を用いて説明する。
【0018】
図1は、本発明の一実施の形態である車両用表示装置10を適用した車両100における車両用走行制御ユニットの概略構成を模式的に示し、この車両用走行制御ユニットを車両左前方側から目視した状態を示す斜視図であり、図2は、本発明の一実施の形態である車両用表示装置10を適用した車両100における車両用走行制御ユニットのブロック図である。
【0019】
図1及び図2に例示されるように、本実施の形態の車両100には、この車両100の運転状態を制御する車両用走行制御ユニットが搭載されている。この車両用走行制御ユニットは、主に、車両100の走行中における横滑りを防止する役目を果たし、例えば、VDC(Vehicle Dynamic Control)システムを用いて構成されている。
【0020】
この車両用走行制御ユニットは、この車両用走行制御ユニットの制御部である走行制御基板110を備えて構成されている。この走行制御基板110は、走行制御CPU111、走行制御ROM112及び走行制御RAM113を有して構成されている。
【0021】
そして、走行制御基板110は、走行制御CPU111により走行制御ROM112に記憶されている制御プログラムに従い、操舵角センサ101、ホイールセンサ102、横加速度センサ103及びヨーレートセンサ104等の各センサからの検出信号を受信し、走行制御RAM113に格納されている各種データに基づき、エンジン制御、ブレーキ制御等を行っている。
【0022】
本実施の形態において、走行制御基板110の入力側には、運転者により図示しないステアリング操作の操舵角を検出する操舵角センサ101と、車輪の回転速度を検出するホイールセンサ102と、車両100の横加速度を検出する横加速度センサ103と、車両100の回転を検出するヨーレートセンサと、が接続されている。
【0023】
これら操舵角センサ101、ホイールセンサ102、横加速度センサ103及びヨーレートセンサ104は、周知のものであるのでその説明を省略する。
【0024】
一方、走行制御基板110の出力側には、ハイドローリックユニット105が接続されている。このハイドローリックユニット105は、車両100の各車輪に併設されているブレーキホイールシリンダに対し、ブレーキ油圧を強制的に供給する役目を果たしている。すなわち、ハイドローリックユニット105は、各ブレーキホイールシリンダにブレーキ油圧を供給し、各車輪の回転速度を調整している。
【0025】
本実施の形態において、走行制御基板110の出力側には、この走行制御基板110で処理した情報を乗員に報知する報知手段である車両用表示装置10の表示制御を行う表示制御基板120が接続されている。
【0026】
(走行制御処理)
次に、本実施の形態の車両用走行制御ユニットの処理手順について、図3を用いて説明する。図3は、本発明の一実施の形態である車両用走行制御ユニットの走行制御処理を示すフローチャートである。
【0027】
この処理において、走行制御基板110では、図示しないステアリングの操舵角値、車両100のヨーレート値及び車両100の横加速度(左右方向加速度)値の旋回限界値が走行制御基板ROM112に記憶されている。
【0028】
また、この処理において、走行制御基板110では、旋回限界値と同様に、図示しないステアリングの操舵角値、車両100のヨーレート値及び車両100の横加速度(左右方向加速度)の操縦安定値が走行制御基板ROM112に記憶されている。
【0029】
なお、旋回限界値とは、車輪のキャンバ角が傾いている状態で車両100が走行(旋回または直進)した場合に、車両100が横滑りする恐れがあると判断される操舵角値、ヨーレート値及び横加速度値の限界値として設定された値である。
【0030】
一方、操縦安定値とは、車輪のキャンバ角が傾いている状態で車両100が走行(旋回または直進)した場合に、車両100の走行に影響を与えると判断される操舵角値、ヨーレート値及び横加速度値の限界値として設定された値である。ここで、旋回限界値と操縦安定値とは、旋回限界値の方が操縦安定値よりも大きい値で設定されている。
【0031】
ステップS1において、走行制御基板CPU111は、ステアリングの操舵角値を取得する。なお、この操舵角値は、車両100の操舵角センサにより取得している。
【0032】
ステップS2において、走行制御基板CPU111は、ヨーレート値を取得する。なお、このヨーレート値は、車両100のヨーレートセンサにより取得している。
【0033】
ステップS3において、走行制御基板CPU111は、横加速度値を取得する。なお、この横加速度値は、横加速度センサにより取得している。
【0034】
ステップS4において、走行制御基板CPU111は、上記ステップS1で取得したステアリングの操舵角値が旋回限界値以上であるか否かの判定を行う。この処理において、走行制御基板CPU111は、ステアリングの操舵角値が旋回限界値以上であると判定した場合には、ステップS11に処理を移す。
【0035】
一方、この処理において、走行制御基板CPU111は、ステアリングの操舵角値が旋回限界値以上ではない、すなわち、以下であると判定した場合には、ステップS5に処理を移す。
【0036】
ステップS5において、走行制御基板CPU111は、上記ステップS2で取得したヨーレート値が旋回限界値以上であるか否かを判定する。この処理において、走行制御基板CPUは、ヨーレート値が旋回限界値以上であると判定した場合には、ステップS11に処理を移す。
【0037】
一方、この処理において、走行制御基板CPU111は、ヨーレート値が旋回限界値以上でない、すなわち、以下であると判定した場合には、ステップS6に処理を移す。
【0038】
ステップS6において、走行制御基板CPU111は、上記ステップS3で取得した横加速度値が旋回限界値以上であるか否かを判定する。この処理において、走行制御基板CPUは、横加速度値が旋回限界値以上であると判定した場合には、ステップS11に処理を移す。
【0039】
一方、この処理において、走行制御基板CPU111は、横加速度値が旋回限界値以上でない、すなわち、以下であると判定した場合には、ステップS7に処理を移す。
【0040】
ステップS7において、走行制御基板CPU111は、上記ステップS1で取得したステアリングの操舵角値が操縦安定値以上であるか否かの判定を行う。この処理において、走行制御基板CPU111は、ステアリングの操舵角値が操縦安定値以上であると判定した場合には、ステップS10に処理を移す。
【0041】
一方、この処理において、走行制御基板CPU111は、ステアリングの操舵角値が操縦安定値以上ではない、すなわち、以下であると判定した場合には、ステップS8に処理を移す。
【0042】
ステップS8において、走行制御基板CPU111は、上記ステップS2で取得したヨーレート値が操縦安定値以上であるか否かを判定する。この処理において、走行制御基板CPU111は、ヨーレート値が操縦安定値以上であると判定した場合には、ステップS10に処理を移す。
【0043】
一方、この処理において、走行制御基板CPU111は、ヨーレート値が操縦安定値以上でない、すなわち、以下であると判定した場合には、ステップS9に処理を移す。
【0044】
ステップS9において、走行制御基板CPU111は、上記ステップS3で取得した横加速度値が操縦安定値以上であるか否かを判定する。この処理において、走行制御基板CPU111は、横加速度値が操縦安定値以上であると判定した場合には、ステップS10に処理を移す。
【0045】
一方、この処理において、走行制御基板CPU111は、横加速度値が操縦安定値以上でない、すなわち、以下であると判定した場合には、この走行制御処理を終了する。
【0046】
すなわち、本実施の形態において、走行制御基板CPU111は、操舵角値、ヨーレート値及び横加速度値が旋回限界値よりも小さく、かつ、操縦安定値よりも小さい場合には、この走行制御処理を終了する。
【0047】
ステップS10において、走行制御基板CPU111は、上記ステップS7からステップS9で操舵角値、ヨーレート値及び横加速度値の何れかが操縦安定値以上であると判定した場合には、VDC予備制御フラグをオンにする。
【0048】
ステップS11において、走行制御基板CPU111は、上記ステップS4からステップS6で操舵角値、ヨーレート値及び横加速度値の何れかが旋回限界値以上であると判定した場合には、VDC本制御フラグをオンにする。
【0049】
このように、本実施の形態の走行制御基板CPU111は、ステアリングの操作角値、車両100のヨーレート値及び車両100の横加速度値が旋回限界値以下で、かつ、ステアリングの操舵角値、車両100のヨーレート値及び車両100の横加速度値の何れかが操縦安定値以上である場合には、VDC予備制御フラグをオンにしている。
【0050】
また、本実施の形態の走行制御基板CPU111は、ステアリングの操作量、車両100のヨーレート値及び車両100の横加速度値の何れかが旋回限界値以上である場合には、VDC本制御フラグをオンにしている。
【0051】
これにより、本実施の形態の走行制御基板110は、例えば、ステアリングの操舵角値が旋回限界値よりも小さいが、走行する路面の摩擦係数が低く、これに起因して車両100に横滑りが発生するような場合、車両100のヨーレート値が旋回限界値以上であるかを判断しているため、車両100の横滑りを抑制することができる。
【0052】
また、本実施の形態の走行制御基板110は、例えば、車両100が直進走行状態にあり、ステアリングの操舵角値及びヨーレート値が旋回限界値よりも小さいが、トンネルを抜ける際に横風を受けた場合のように、外乱の影響で車両100の挙動が不安定となる場合であっても、車両100の横加速度値が旋回限界値以上であるかを判断しているため、操縦安定性を確保することができる。
【0053】
(表示制御処理)
以下、本実施の形態の走行制御基板110に基づいた車両用表示装置10の表示制御基板120の処理手順について、図4乃至図6を用いて説明する。図4は、本発明の一実施の形態である車両用走行制御ユニットの表示制御処理を示すフローチャートである。
【0054】
図5は、本発明の一実施の形態である車両用走行制御ユニットの表示制御処理におけるVDC表示判定処理を示すフローチャートであり、図6は、本発明の一実施の形態である車両用走行制御ユニットの表示制御処理における舵角表示処理を示すフローチャートである。
【0055】
ステップS100において、表示制御CPU121は、走行制御基板110から受信したコマンドに基づいて表示切換処理を行う。この処理において、表示制御CPU121は、車両100の駆動方式の表示切換処理を行う。
【0056】
すなわち、この処理において、表示制御CPU121は、車両100の駆動方式が4WDである場合には、車両用表示装置10に表示される車両モデル11の左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15、右後方車輪モデル16の夫々に、駆動源モデル12からの伝達状況を指し示す後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を表示する表示態様に切り換える。
【0057】
また、この処理において、表示制御CPU121は、車両100の駆動方式が2WDである場合には(例えば、FFの場合)、車両用表示装置10に後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を表示させない表示態様に切り換える。
【0058】
なお、この処理において、表示制御CPU121は、車両100の駆動方式が2WDである場合には、上述したように、後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を表示させない表示態様としているが、これに限定されず、例えば、FFの場合、左前方車輪矢印18及び右前方車輪矢印19を表示させる表示態様にしても良い。
【0059】
ステップS200において、表示制御CPU121は、走行制御基板110から受信したコマンドに基づいて走行表示処理を行う。この処理において、表示制御CPU121は、車両100が走行中であることを表示している。
【0060】
ここで、図7Bに例示されるように、表示制御CPU121は、上記ステップS1で切り換えた表示態様に基づき、例えば、駆動方式が4WDの場合、後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を表示させ、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を緑色に表示している。
【0061】
ステップS300において、表示制御CPU121は、走行制御基板110から受信したコマンドに基づいて、ABS表示判定処理を行う。この処理において、表示制御CPU121は、走行制御基板110から受信したコマンドに基づいて、車両100でABSが作動中である場合に、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を黄色に表示している。
【0062】
ここで、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を黄色に表示する際、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の全てではなく、ABSが作動している車輪のみ表示色を黄色に表示しても良い。
【0063】
また、この処理において、表示制御CPU121は、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を点滅させて表示している。ここで、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を点滅させる際、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21の全てではなく、ABSが作動している車輪のみ点滅させても良い。
【0064】
なお、本実施の形態において、表示制御CPU121は、表示態様の一例として、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16をABSの作動時と非作動時とで異なる色で表示させているが、これに限定されず、例えば、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16をABSの作動時には、点滅表示とし、非作動時には点灯表示としても良い。
【0065】
ステップS400において、表示制御CPUは、走行制御基板110から受信したコマンドに基づいて、VDC表示判定処理を行う。なお、このVDC表示判定処理については、図5を用いて後述する。
【0066】
ステップS500において、表示制御CPUは、走行制御基板110から受信したコマンドに基づいて、舵角表示判定処理を行う。この舵角表示判定処理については、図6を用いて後述する。
【0067】
(VDC表示処理)
ステップS410において、表示制御CPU121は、走行制御基板CPU111から受信したコマンドのうち、VDC予備制御用フラグがONであるか否かを判定する。この処理において、表示制御CPU121は、VDC予備制御用フラグがONであると判定した場合には、ステップS420に処理を移す。一方、この処理において、表示制御CPU121は、VDC予備制御用フラグがOFFであると判定した場合には、この表示基本処理を終了する。
【0068】
すなわち、図7Bに例示されるように、表示制御CPU121は、VDC予備制御用フラグがONであると判定した場合には、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を緑色に表示している。
【0069】
ステップS420において、表示制御CPU121は、VDC予備制御用フラグのON状態が所定の時間内であるか否かを判定する。この処理において、表示制御CPU121は、VDC予備制御用フラグのON状態が所定の時間内であると判定した場合には、ステップS450に処理を移す。一方、この処理において、表示制御CPU121は、VDC予備制御用フラグのON状態が所定の時間内でないと判定した場合には、ステップS430に処理を移す。
【0070】
ステップS430において、表示制御CPU121は、VDC予備制御用フラグのON状態が所定の時間よりも長時間であるか否かを判定する。この処理において、表示制御CPU121は、VDC予備制御用フラグのON状態が所定の時間よりも長時間である場合には、ステップS440に処理を移す。
【0071】
一方、この処理において、表示制御CPU121は、VDC予備制御用フラグのON状態が所定の時間よりも長時間ではない、すなわち、上記ステップS420で所定の時間内ではないと判定しているため、短時間である場合には、この基本表示処理を終了する。
【0072】
すなわち、この処理において、表示制御CPU121は、VDC予備制御用フラグがONであったとしても、VDC予備制御用フラグのON状態の時間が所定の時間よりも短時間である場合には、図7Bに例示されるように、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を緑色に表示している。
【0073】
このように、本実施の形態の車両用表示装置10は、必要以上にVDC作動状態を表示することなく、走行中における安心感を高めることが可能になり、走行中における安全性を高めることができる。
【0074】
また、本実施の形態の車両用表示装置10は、例えば、VDCの誤作動によりフラグが立ってしまったとしても、上述したように、必要以上にVDC作動状態を表示していないため、VDCの誤作動による表示を抑制することができる。
【0075】
ステップS440において、表示制御CPU121は、VDC本制御用フラグがONであるか否かを判定する。この処理において、表示制御CPU121は、VDC本制御用フラグがONであると判定した場合には、ステップS460に処理を移す。一方、この処理において、表示制御CPU121は、VDC本制御用フラグがONでないと判定した場合には、ステップS450に処理を移す。
【0076】
ステップS450において、表示制御CPU121は、VDC予備制御表示処理を行う。この処理において、表示制御CPU121は、VDC予備制御表示処理として、図7Cに例示されるように、車両用表示装置10に左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を黄色に表示している。
【0077】
このように、本実施の形態の車両用表示装置10は、車両用表示装置10に左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を変化させることで、運転者に予備的に走行状態を把握させることが可能になり、走行中における注意力を促すことが可能になり、安全性を高めることができる。
【0078】
また、この処理において、表示制御CPU121は、VDC予備制御用表示処理として、車両用表示装置10に左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を点滅させて表示している。
【0079】
ステップS460において、表示制御CPU121は、VDC本制御表示処理を行う。この処理において、表示制御CPU121は、VDC本制御表示処理として、図7Dに例示されるように、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16を点滅させるとともに、VDC本制御作動モデル24を表示させる。
【0080】
このように、本実施の形態の車両用表示装置10は、車両用表示装置10に左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16を点滅させたり、VDC本制御作動モデル24を表示しているため、運転者に瞬時に走行状態を把握させることが可能になり、安全性を高めることができる。
【0081】
ステップS470において、表示制御CPU121は、VDC予備制御表示処理及びVDC本制御表示処理の履歴表示処理を行う。この処理において、表示制御CPU121は、履歴表示処理として、図7C及び図7Dに例示されるように、表示したときから所定の時間の間、履歴表示バー33を表示している。
【0082】
このように、本実施の形態の車両用表示装置10は、VDC予備制御表示処理及びVDC本制御表示処理で処理した表示履歴を表示することで、走行中における見落としを防ぎ、事前準備を促し、安全性を高めることができる。
【0083】
(舵角表示処理)
ステップS510において、表示制御CPU121は、走行制御手段110から舵角信号を受信したか否かの判定を行う。この処理において、表示制御CPU121は、舵角信号を受信したと判定した場合には、ステップS520に処理を移す。この処理において、表示制御CPU121は、舵角信号を受信する際、舵角度値も受信している。
【0084】
一方、この処理において、表示制御CPU121は、舵角信号を受信していないと判定した場合には、この舵角表示処理を終了する。
【0085】
ステップS520において、表示制御CPUは、走行制御手段110で受信した舵角信号に基づいて車両用表示装置10の左前方車輪モデル13及び右前方車輪モデル14の舵角を表示する表示処理を行う。
【0086】
次に、本実施の形態の車両用表示装置10に表示される表示態様について、図7A、図7B、図7C及び図7Dを用いて説明する。なお、図7Aに例示される第1の表示態様は、車両100の停止状態を示している。
【0087】
また、図7Bに例示される第2の表示態様は、車両100の走行状態を示しており、図7Cに例示される第3の表示態様は、車両100の走行状態におけるVDC予備制御が作動している状態を示しており、図7Dに例示される第4の表示態様は、車両100の走行状態におけるVDC本制御が作動している状態を示している。
【0088】
図7Aに例示されるように、車両用表示装置10の中央には、車両モデル11が表示されている。また、車両用表示装置10には、車両モデル11を構成する車両100の駆動源としてのエンジンモデル12と、車両100の車輪としての左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16が表示されている。
【0089】
また、車両用表示装置10には、車道モデルを構成する左側車道モデル22及び右側車道モデル23が表示されている。そして、これら左側車道モデル22及び右側車道モデル23は、車両100の走行中を表示する表示態様として、車両用表示装置10の上方から下方に向かって流動するように表示される。これにおり、本実施の形態の車両用表示装置10は、車両100が走行中であることを明示している。
【0090】
このように、本実施の形態の車両用表示装置10は、車道臨界線を上方から下方に向かって流動するように表示しているため、乗員に車両100の走行状態をより容易に把握させることが可能になる。
【0091】
図7Bに例示されるように、本実施の形態の車両用表示装置10には、図7Aに例示した車両モデル11、車両モデル11を構成するエンジンモデル12、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16、左側車道モデル22、右側車道モデル23の他に、駆動方式モデルとして後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21が表示されている。
【0092】
これら後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21は、車両100の駆動方式を指し示す役目を果たしている。具体的には、後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21は、車両100が4WDの場合、全て表示され、エンジンモデル12から左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16に動力が伝達している旨を表示している。
【0093】
また、後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21は、車両100が2WDの場合、全て表示されない。なお、本実施の形態の駆動方式モデルは、上述したように、2WDの場合、後方車輪矢印17、左前方車輪矢印18、右前方車輪矢印19、左後方車輪矢印20及び右後方車輪矢印21を全て表示させない表示態様としているが、これに限定されず、例えば、左前方車輪矢印18及び右前方車輪矢印19のみを表示させる表示態様としても良い。
【0094】
図7Cに例示されるように、本実施の形態の車両用表示装置10には、車両100のVDC予備制御の作動状態に関し、車両モデル11の左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を変更して表示している。
【0095】
ここで、本実施の形態の車両用表示装置10には、VDC予備制御の作動状態時の表示態様として、左前方車輪モデル13、右前方車輪モデル14、左後方車輪モデル15及び右後方車輪モデル16の表示色を変更して表示しているが、この表示色の一例として、作動時に黄色で表示し、非作動時では緑色で表示している。
【0096】
図7Dに例示されるように、本実施の形態の車両用表示装置10には、車両100のVDC本制御の作動状態に関し、VDC本制御作動モデル24が表示されている。
【0097】
本実施の形態において、車両用表示装置10には、VDC履歴モデル30が表示されている。そして、車両用表示装置10には、このVDC履歴モデル30を構成する履歴表示領域31と、この履歴表示領域に付された時間目盛32と、履歴表示領域31内で移動可能な履歴バー33とが表示されている。
【0098】
このVDC履歴モデル30は、VDC予備制御作動時から所定の時間まで、履歴表示領域31内で履歴バー33を移動させて表示する表示態様となっている。例えば、図7C及び図7Dに例示されるように、履歴バー33が18秒を指し示す位置と、3秒を指し示す位置とに表示されている。
【0099】
すなわち、車両用表示装置10は、VDC予備制御、或いは、VDC本制御が18秒前及び3秒前に作動したことを指し示している。このため、車両用表示装置10は、VDC予備制御、或いはVDC本制御が作動していることのみならず、何秒前に作動したかを表示しているため、運転者の見落としを抑制することが可能になり、安全性を高めることができる。
【0100】
以上のように、本実施の形態の車両用表示装置10は、各車輪の応答性能の見落としを抑制することで、運転者に事前に注意を促すことが可能になり、走行中における安全性を高めることができる。
【0101】
なお、本実施の形態の車両用表示装置10は、VDCの履歴表示を可能しているが、これに限定されず、例えば、ABSの履歴表示を行うようにしても良い。このような場合、車両用表示装置10は、VDCの表示履歴情報及びABSの表示履歴情報の何れも受信した場合、何れか一方を優先して表示するように設定されている。
【符号の説明】
【0102】
10 車両用表示装置
11 車両モデル
12 駆動源モデル
13 左前方車輪モデル(車輪モデル)
14 右前方車輪モデル(車輪モデル)
15 左後方車輪モデル(車輪モデル)
16 右後方車輪モデル(車輪モデル)
17 後方車輪矢印(駆動状態モデル)
18 左前方車輪矢印(駆動状態モデル)
19 右前方車輪矢印(駆動状態モデル)
20 左後方車輪矢印(駆動状態モデル)
21 右後方車輪矢印(駆動状態モデル)
22 左側車道モデル
23 右側車道モデル
24 VDC本制御作動モデル(異変状態モデル)
30 VDC履歴モデル(異変状態履歴モデル)
31 履歴表示領域
32 時間目盛
33 履歴バー
100 車両
101 操舵角センサ
102 ホイールセンサ
103 横加速度センサ
104 ヨーレートセンサ
110 走行制御基板
120 表示制御基板
【特許請求の範囲】
【請求項1】
車両の走行状態を制御する制御手段に基づいて、前記走行状態を表示する車両用表示装置であって、
前記車両を表す車両モデルと、
前記車両の車輪を表す車輪モデルと、
前記車輪の駆動状態の異変に応じて当該異変状態を表す異変状態モデルと、
前記異変状態を所定の時間経過後まで表す異変状態履歴モデルと、が表示されること、
を特徴とする車両用表示装置。
【請求項2】
前記車両モデル、前記車輪モデル、前記異変状態モデル及び前記異変状態履歴モデルの他に、前記車輪の駆動状態を表す駆動状態モデルが表示されること、
を特徴とする請求項1記載の車両用表示装置。
【請求項3】
前記異変状態モデルは、前記車輪の駆動状態の異変レベルに応じて異なる表示態様で表示されること、
を特徴とする請求項1又は2記載の車両用表示装置。
【請求項4】
前記車輪モデルは、前記車輪の舵角に連動して表示されること、
を特徴とする請求項1乃至3の何れか一項に記載の車両用表示装置。
【請求項1】
車両の走行状態を制御する制御手段に基づいて、前記走行状態を表示する車両用表示装置であって、
前記車両を表す車両モデルと、
前記車両の車輪を表す車輪モデルと、
前記車輪の駆動状態の異変に応じて当該異変状態を表す異変状態モデルと、
前記異変状態を所定の時間経過後まで表す異変状態履歴モデルと、が表示されること、
を特徴とする車両用表示装置。
【請求項2】
前記車両モデル、前記車輪モデル、前記異変状態モデル及び前記異変状態履歴モデルの他に、前記車輪の駆動状態を表す駆動状態モデルが表示されること、
を特徴とする請求項1記載の車両用表示装置。
【請求項3】
前記異変状態モデルは、前記車輪の駆動状態の異変レベルに応じて異なる表示態様で表示されること、
を特徴とする請求項1又は2記載の車両用表示装置。
【請求項4】
前記車輪モデルは、前記車輪の舵角に連動して表示されること、
を特徴とする請求項1乃至3の何れか一項に記載の車両用表示装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図7D】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7A】
【図7B】
【図7C】
【図7D】
【公開番号】特開2013−67230(P2013−67230A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−205950(P2011−205950)
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
[ Back to top ]