
車両用視覚能力訓練装置
【課題】ドライバーの周辺視野での視覚能力を向上させる。
【解決手段】LED50L、50C、50Rは、着座したドライバーの左前方、正面近傍、および右前方にそれぞれ設定された発光位置において、ドライバーの視覚認知を引き出すための光刺激を発生させる。走行環境判定部12は、車両の走行環境を取得し、光刺激の発生を許可するための所定の走行環境であるか否かを判定する。訓練制御部14は、走行環境判定部12により所定の走行環境であると判定されたとき、LEDによる光刺激の発生タイミングと発光位置の切り換えとを制御する。
【解決手段】LED50L、50C、50Rは、着座したドライバーの左前方、正面近傍、および右前方にそれぞれ設定された発光位置において、ドライバーの視覚認知を引き出すための光刺激を発生させる。走行環境判定部12は、車両の走行環境を取得し、光刺激の発生を許可するための所定の走行環境であるか否かを判定する。訓練制御部14は、走行環境判定部12により所定の走行環境であると判定されたとき、LEDによる光刺激の発生タイミングと発光位置の切り換えとを制御する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両走行中のドライバーの視覚能力を訓練するための装置に関する。
【背景技術】
【0002】
近年、高齢者の運転する車両による事故の多発が問題となっている。この要因の一つとして、加齢に伴って有効視野角が狭くなることが指摘されている。そこで、衝突の危険性のある物体を検出してドライバーに報知する技術が開発されている。
【0003】
例えば、特許文献1には、自車両の衝突可能性に基づいて運転者に注意喚起を与える車両用運転支援装置が開示されている。この装置は、運転者の視線方向に基づき、運転者が注意を払うべき物体又は領域に注意を払っているか否かを判定し、運転者が注意を払っていないと判定された物体又は領域について運転者に対して注意喚起を行う。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−231962号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1のように注意を払うべき物体や領域の注意喚起も有効であるが、事故予防の観点からは、ドライバー自身の視覚認知能力を向上させることがさらに望ましい。
【0006】
本発明はこうした状況に鑑みてなされたものであり、その目的は、車両走行中のドライバーの周辺視野における視覚認知能力を訓練するための技術を提供することにある。
【課題を解決するための手段】
【0007】
本発明のある態様は、車両用視覚能力訓練装置である。この装置は、着座したドライバーの少なくとも左前方および右前方にそれぞれ設定された発光位置において、ドライバーの視覚認知を引き出すための光刺激を発生させる発光手段と、車両の走行環境を取得し、前記光刺激の発生を許可するための所定の走行環境であるか否かを判定する判定手段と、前記判定手段により所定の走行環境であると判定されたとき、前記発光手段による光刺激の発生タイミングと前記発光位置の切り換えとを制御する制御手段と、を備える。
【0008】
この態様によると、ドライバーが車両を運転しているときにその左右前方で光刺激を発生させる視覚訓練を実行するので、ドライバーの左右の周辺視野における視覚能力を鍛えることができる。
【0009】
前記判定手段は、所定の車間距離以上開いた先行車が存在することを前記所定の走行環境として含んでもよい。これによると、ドライバーに先行車に対する注意を払わせた状態で視覚訓練が行われるので、ドライバーの視線を光刺激の方向に向けさせることなく、周辺視野における認知力を効率的に鍛えることができる。
【0010】
前記制御手段は、前記発光手段から光刺激をランダムに発生させてもよい。これにより、ドライバーが訓練に慣れてしまうことを防止できる。
【0011】
前記発光手段による光刺激をドライバーが認知したときに所定の入力機器を使用して行う確認操作を受け付ける操作受付手段をさらに備えてもよい。これにより、ドライバーが実際に光刺激を認知しているか否かについての情報を得ることができる。
【発明の効果】
【0012】
本発明によれば、車両走行中のドライバーの周辺視野における視覚認知能力を訓練することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係る視覚能力訓練装置の模式図である。
【図2】LEDの設置場所を示す図である。
【図3】視覚能力訓練装置の構成を示すブロック図である。
【図4】視覚訓練を実行するための条件を判定するフローチャートである。
【図5】認知率テストを実施した車両の構成を示す模式図である。
【図6】視覚能力訓練装置を用いた訓練後の、20歳代の被験者に対する認知率テストの結果を示す図である。
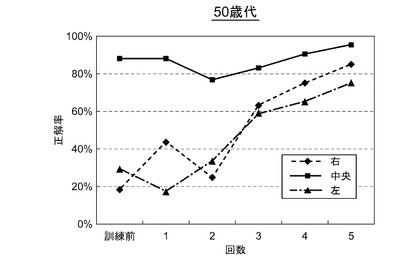
【図7】視覚能力訓練装置を用いた訓練後の、50歳代の被験者に対する認知率テストの結果を示す図である。
【発明を実施するための形態】
【0014】
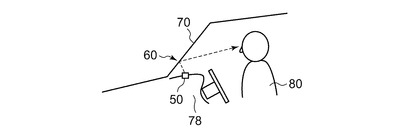
図1は、本発明の一実施形態に係る車両用の視覚能力訓練装置100の模式図である。図1は、車室内から車両の前方を観察した様子を示している。視覚能力訓練装置100は、車両の車室内に設置され、ドライバーの前方の複数箇所、特に左前方、正面近傍、右前方の三カ所で光刺激をランダムに発生させて、ドライバーの前方認知力を強化することを目的とする。以下の説明においては、視覚能力訓練装置100によるランダムな光刺激によりドライバーの視覚能力を向上させる訓練を「視覚訓練」と称する。
【0015】
光刺激は、右ハンドルの車両72に着座したドライバー80の左前方、前方、および右前方にそれぞれ設定された、フロントガラス70上の発光位置60L、60C、60Rで発生する。光刺激の発光手段は、例えばLED(Light Emitting Diode)50であり、図2に示すように車両のダッシュボード78の上方に設置される。左LED50L(図3参照)は左発光位置60Lに対応し、中央LED50Cは中央発光位置60Cに対応し、右LED50Rは右発光位置60Rに対応する。各LEDから放射された光は、フロントガラス上の対応する発光位置で反射されて、ドライバー80によって観察される。このような反射方式とすることで、LEDをフロントガラスに直接取り付ける必要がなく、また訓練不実施時に前方視界を妨げることがない。三つのLED50L、50C、50Rは、後述するように視覚訓練ECU(Electronic Control Unit)によって制御される。
【0016】
発光位置60L、60C、60Rは、例えば以下のような位置に設定される。
左発光位置60L:ドライバーの前方視線に対して左向きに40°の方向
中央発光位置60C:ドライバーの前方視線に対して左向きに1.3°の方向
右発光位置60R:ドライバーの前方視線に対して右向きに20°の方向
左および右の発光位置は、ドライバー80の約3m先の車線左端76Lおよび右端76Rを観察することを意図して設定されている。この位置は、左右からの他車両の割り込みを検知するのに適している。中央発光位置は、自車の約1秒前を走行している先行車74の中心を観察することを意図して設定されている。なお、左ハンドルの車両の場合、上記の発光位置を左右反転させたものになる。
【0017】
なお、各LEDの色は任意であるが、背景環境に影響を受けにくい色であることが好ましい。左、中央、右LEDの色および輝度は、同一であっても異なっていてもよい。
【0018】
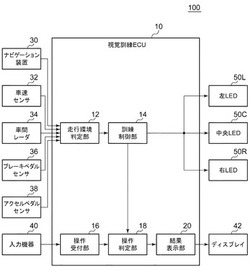
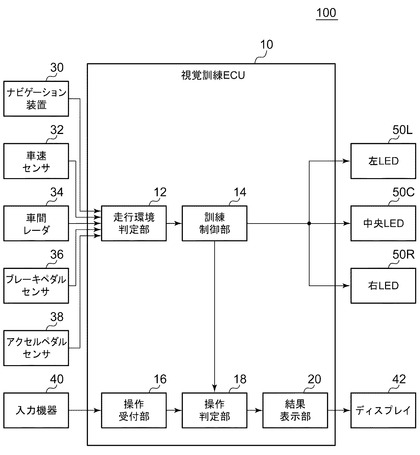
図3は、本実施形態に係る視覚能力訓練装置100の構成を示すブロック図である。視覚訓練ECU10の各ブロックは、ハードウェア的には、コンピュータのCPUやメモリをはじめとする素子や機械装置で実現でき、ソフトウェア的にはコンピュータプログラム等によって実現されるが、ここでは、それらの連携によって実現される機能ブロックとして描いている。したがって、これらの機能ブロックはハードウェア、ソフトウェアの組み合わせによっていろいろなかたちで実現できることは、当業者には理解されるところである。
【0019】
走行環境判定部12は、車両が走行中の環境が、上述の視覚訓練を実行するのに適切な環境であるか否かを判定する。具体的には、走行環境判定部12は、ナビゲーション装置30から走行中の道路が自動車専用道であるか否かの情報を、車速センサ32から自車速度を受け取る。また、走行環境判定部12は、赤外線レーザやミリ波などを前方に発信し先行車による反射波を検出する車間レーダ34からの情報を受け取り、先行車の有無を判定するとともに、先行車が存在する場合には車間距離を推定する。また、走行環境判定部12は、ブレーキペダルセンサ36およびアクセルペダルセンサ38から、それぞれのペダルが操作されているか否かの情報を受け取る。そして、走行環境判定部12は、これらの情報に基づいて、視覚訓練を実行するのに適切な環境であるかを判定する。この判定は、視覚訓練を実行してもドライバーの前方に対する注意力が削がれないようにするという観点から実行される。視覚訓練を実行するのに適切な環境であれば、走行環境判定部12は訓練制御部14に対して視覚訓練の開始を許可する。
【0020】
訓練制御部14は視覚訓練を実行する。具体的には、ドライバーの前方に設置された左LED50L、中央LED50C、右LED50Rによる発光位置の切り換えと、それぞれの発光タイミングとを制御する。左、中央、右のLEDの発光はランダムに切り換えられることが好ましい。
【0021】
視覚能力訓練装置100は、ドライバーが光刺激を認知したことを確かめるための入力機器40を選択的に備えていてもよい。この場合、視覚訓練ECU10は、操作受付部16、操作判定部18および結果表示部20を備える。
【0022】
操作受付部16は、入力機器40を用いたドライバーの確認操作入力を受け取る。入力機器40は、訓練専用のボタンやレバー等であってもよいが、通常の車両に設けられているボタンやレバー等と兼用させることが好ましい。例えば、ナビゲーション装置やオーディオ装置のボタン、ワイパーレバー、ステアリングスイッチなどが考えられる。視覚訓練の実行中は、これらの入力機器の本来の機能はキャンセルされるように構成される。
【0023】
入力機器40を用いたドライバーによる確認操作は、以下のようなものが考えられる。例えば、左LEDと右LEDの点灯時に、それぞれの光刺激を認知できたことを二つの入力機器で確認操作してもよい。または、左LEDまたは右LEDのいずれか一方の点灯時のみに、光刺激を認知できたことを一つの入力機器で確認操作してもよい。後述するように、右ハンドルの車両では一般に左LEDの認知率が低いので、左LEDの点灯時のみに確認操作させるようにしてもよいし、ドライバーが左LEDと右LEDのいずれかを選択できるようにしてもよい。
【0024】
操作判定部18は、ドライバーによる確認操作が正しいか否かを判定する。具体的には、訓練制御部14から左、中央、右のLEDのうちいずれを点灯させたかの情報を受け取り、その時点から所定時間内に対応する確認操作が操作受付部16により受け取られていた場合、ドライバーが光刺激を正しく認知したと判定する。
【0025】
結果表示部20は、操作判定部18による確認操作の判定結果に基づき、例えば正解率などの訓練結果をナビゲーション装置やインストルメンタルパネル上のディスプレイ42に表示する。これによって、ドライバーは視覚訓練の結果を直ちに知ることができる。
【0026】
結果表示部20の代わりに、またはこれに加えて、訓練結果を外部メモリ等に出力する結果出力部を設け、降車後に訓練結果をパーソナルコンピュータ等で確認できるようにしてもよい。
【0027】
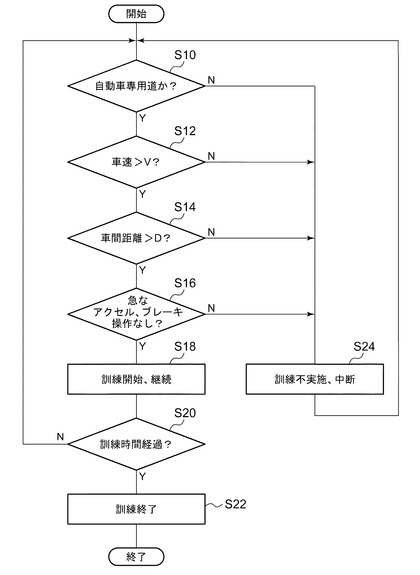
図4は、走行環境判定部12による、視覚訓練を実行するための条件を判定する処理のフローチャートである。このフローは、車両走行中に所定の間隔(例えば数秒毎)に繰り返し実行される。
【0028】
走行環境判定部12は、ナビゲーション装置30からの情報に基づき、走行中の道路が自動車専用道であるか否かを判定する(S10)。自動車専用道であるか否かは、走行中の道路の属性データに基づき判別することができる。自動車専用道であることを判定する理由は、自動車専用道であれば車両を右左折させる頻度が少なくステアリング操作も少ないので、視覚訓練を実施してもドライバーの注意力を削ぐ恐れがないと考えられるためである。代替的に、舵角センサにより取得されたステアリングホイールの舵角が所定の角度以下であるか、すなわち車両が直進走行中であるか否かを判定してもよい。
【0029】
続いて、走行環境判定部12は、車速センサ32からの情報に基づき、車速が所定値V(例えば、30km/h)以上であるか否かを判定する(S12)。この判定は、車速を落としているときは信号や右左折など注意を払う対象が多いことを考慮し、車両が巡航しているときに訓練を実施するために行われる。
【0030】
走行環境判定部12は、車間レーダ34からの情報に基づき、所定の車間距離D(例えば、自車両の車速で1秒分離れている距離)以上離れた先行車が存在するか否かを判定する(S14)。本実施形態の視覚訓練は、ドライバーが先行車を前方注視している状態で実行することが好ましいためである。
【0031】
さらに、走行環境判定部12は、ブレーキペダルセンサ36およびアクセルペダルセンサ38からの情報に基づき、急減速または急加速がされていないか否かを判定する(S16)。この判定を行う理由は、急減速または急加速時には車両周辺環境が大きく変化するので、ドライバーの注意力を視覚訓練に向けるのは好ましくないと考えられるからである。
【0032】
S10〜S16のいずれかで判定が否定的であるとき、走行環境判定部12は視覚訓練を許可しない。したがって、訓練制御部14は視覚訓練を開始しないか、実施中である場合には直ちに中断する(S24)。S10〜S16のいずれの判定も肯定的であるとき、走行環境判定部12は視覚訓練を許可する。これに応じて、訓練制御部14は視覚訓練を開始するか、すでに実行中である場合はそのまま継続する(S18)。
【0033】
走行環境判定部12は、視覚訓練の許可時から時間を計測し、所定の時間(例えば、10分)が経過すると(S20のY)、視覚訓練を終了するよう訓練制御部14に指令する(S22)。視覚訓練は例えば一日に一回までとし、走行環境判定部12は、訓練の終了後は日付が変わるまで図4のフローを実行しないことが好ましい。
【0034】
以上のように、適切な走行環境時であるときのみ視覚訓練を実行することで、前方(特に先行車)に対するドライバーの注意が散漫になるのを防止することができる。
【0035】
以下では、上述の実施形態に係る視覚能力訓練装置の有効性を検証した実験結果について説明する。
【0036】
この実験では、まず所定の条件で20歳代および50歳代の被験者に対して視覚訓練を実行した後、認知率の向上を確認するためのテストを行った。視覚訓練の条件は以下の通りである。
発光位置:図1の視覚能力訓練装置と同様に、左、中央、右の三カ所
LED色:緑色
一回の点灯時間:約50ミリ秒
制御:三つのLEDを約2秒間隔でランダムに点灯
【0037】
図5は、認知率テストを実施した車両72’の構成を示す模式図である。このテスト車両72’では、認知率テスト用のLED62L、62C、62Rを車両のボンネット76上に立てた三つのポール上に設置した。但し、ドライバー80からLED62L、62C、62Rへの視線とフロントガラス70付近との交点が、図1の発光位置60L、60C、60Rにそれぞれ対応するようにポールの設置位置を調整した。
【0038】
上記の視覚訓練を5日間、一日一回ずつ実行し、一回の訓練が終了する毎に認知率のテストを実行した。このテストでは、左、中央、右の三通りの操作入力ができる入力機器を使用し、LEDの点灯後所定の時間以内にドライバーからの確認操作があったときに正解と判定した。テストコースを走行中に直線区間で認知率テストを実施し、一周当たりLEDを合計10回点灯させることを5〜6周繰り返した。その他のテストの条件は以下の通りである。
LED色:赤色
一回の点灯時間:1秒
制御:三つのLEDを5〜7秒間隔(平均6秒間隔)でランダムに点灯
【0039】
図6は、20歳代の被験者に対する認知率テストの結果を示し、図7は50歳代の被験者に対する認知率テストの結果を示す。いずれも、横軸は訓練実行回数を示し、縦軸は左LED、中央LED、右LEDからの光刺激に対するドライバーの解答操作の正解率を示す。
【0040】
20歳代の被験者の場合、中央と右の光刺激に対する正解率は訓練前から高率であり、訓練を重ねてもほとんど変化しない。これと比べて左の光刺激に対する正解率は訓練前にはかなり低いものの、二回の訓練で大きく向上していることが分かる。50歳代の被験者の場合、中央の光刺激に対する正解率は訓練前から高率であるのに対し、左および右の光刺激に対する訓練前の正解率は、20歳代よりもかなり低い。しかしながら、訓練を重ねるにつれ、正解率が次第に向上していることが分かる。50歳代において、二回目の訓練後の正解率が一回目よりも低下しているのは、慣れの影響が出ていると考えられる。しかし、その後も訓練を続けることで、正解率は回復している。
【0041】
以上説明したように、本実施形態の視覚能力訓練装置によれば、ドライバーが車両を運転しているときに、ドライバーの左右前方で瞬間的に光刺激を発生させる視覚訓練を実行する。これにより、ドライバーの左右の周辺視野における視覚能力を鍛えることができる。左右の周辺視野は、交差点等において右または左方向から進入してくる車両や、追い越し、割り込みをしてくる車両を早期に発見するために重要である。
【0042】
また、走行環境判定部によって所定の走行環境にあるときにのみ視覚訓練が許可されるので、訓練によってドライバーの注意力を散漫にすることが防止される。特に、車間距離が所定値以上である先行車が存在しているときに視覚訓練が実行されるため、ドライバーは先行車に対して注意を払っており、視線が光刺激の方向に向くことを防止できる。そのため、周辺視野を効率的に鍛えることができる。
【0043】
以上、本発明を実施の形態をもとに説明した。これらの実施の形態はあくまで例示であり、実施の形態どうしの任意の組み合わせ、実施の形態の各構成要素や各処理プロセスの任意の組み合わせなどの変形例もまた、本発明の範囲にあることは当業者に理解されるところである。
本発明は、上述の各実施形態に限定されるものではなく、当業者の知識に基づいて各種の設計変更等の変形を加えることも可能である。各図に示す構成は、一例を説明するためのもので、同様な機能を達成できる構成であれば、適宜変更可能である。
【0044】
実施の形態では、左、中央、右の三カ所で光刺激を発生させることを述べた。しかしながら、左と右の二カ所、あるいは左または右の一カ所でのみ光刺激を発生させるように視覚能力訓練装置を構成してもよい。また、必要に応じて、光刺激の発生箇所を四カ所以上にしてもよい。
【符号の説明】
【0045】
10 視覚訓練ECU、 12 走行環境判定部、 14 訓練制御部、 16 操作受付部、 18 操作判定部、 20 結果表示部、 30 ナビゲーション装置、 32 車速センサ、 34 車間レーダ、 36 ブレーキペダルセンサ、 38 アクセルペダルセンサ、 40 入力機器、 42 ディスプレイ、 50 LED、 60 発光位置、 100 視覚能力訓練装置。
【技術分野】
【0001】
本発明は、車両走行中のドライバーの視覚能力を訓練するための装置に関する。
【背景技術】
【0002】
近年、高齢者の運転する車両による事故の多発が問題となっている。この要因の一つとして、加齢に伴って有効視野角が狭くなることが指摘されている。そこで、衝突の危険性のある物体を検出してドライバーに報知する技術が開発されている。
【0003】
例えば、特許文献1には、自車両の衝突可能性に基づいて運転者に注意喚起を与える車両用運転支援装置が開示されている。この装置は、運転者の視線方向に基づき、運転者が注意を払うべき物体又は領域に注意を払っているか否かを判定し、運転者が注意を払っていないと判定された物体又は領域について運転者に対して注意喚起を行う。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2006−231962号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1のように注意を払うべき物体や領域の注意喚起も有効であるが、事故予防の観点からは、ドライバー自身の視覚認知能力を向上させることがさらに望ましい。
【0006】
本発明はこうした状況に鑑みてなされたものであり、その目的は、車両走行中のドライバーの周辺視野における視覚認知能力を訓練するための技術を提供することにある。
【課題を解決するための手段】
【0007】
本発明のある態様は、車両用視覚能力訓練装置である。この装置は、着座したドライバーの少なくとも左前方および右前方にそれぞれ設定された発光位置において、ドライバーの視覚認知を引き出すための光刺激を発生させる発光手段と、車両の走行環境を取得し、前記光刺激の発生を許可するための所定の走行環境であるか否かを判定する判定手段と、前記判定手段により所定の走行環境であると判定されたとき、前記発光手段による光刺激の発生タイミングと前記発光位置の切り換えとを制御する制御手段と、を備える。
【0008】
この態様によると、ドライバーが車両を運転しているときにその左右前方で光刺激を発生させる視覚訓練を実行するので、ドライバーの左右の周辺視野における視覚能力を鍛えることができる。
【0009】
前記判定手段は、所定の車間距離以上開いた先行車が存在することを前記所定の走行環境として含んでもよい。これによると、ドライバーに先行車に対する注意を払わせた状態で視覚訓練が行われるので、ドライバーの視線を光刺激の方向に向けさせることなく、周辺視野における認知力を効率的に鍛えることができる。
【0010】
前記制御手段は、前記発光手段から光刺激をランダムに発生させてもよい。これにより、ドライバーが訓練に慣れてしまうことを防止できる。
【0011】
前記発光手段による光刺激をドライバーが認知したときに所定の入力機器を使用して行う確認操作を受け付ける操作受付手段をさらに備えてもよい。これにより、ドライバーが実際に光刺激を認知しているか否かについての情報を得ることができる。
【発明の効果】
【0012】
本発明によれば、車両走行中のドライバーの周辺視野における視覚認知能力を訓練することができる。
【図面の簡単な説明】
【0013】
【図1】本発明の一実施形態に係る視覚能力訓練装置の模式図である。
【図2】LEDの設置場所を示す図である。
【図3】視覚能力訓練装置の構成を示すブロック図である。
【図4】視覚訓練を実行するための条件を判定するフローチャートである。
【図5】認知率テストを実施した車両の構成を示す模式図である。
【図6】視覚能力訓練装置を用いた訓練後の、20歳代の被験者に対する認知率テストの結果を示す図である。
【図7】視覚能力訓練装置を用いた訓練後の、50歳代の被験者に対する認知率テストの結果を示す図である。
【発明を実施するための形態】
【0014】
図1は、本発明の一実施形態に係る車両用の視覚能力訓練装置100の模式図である。図1は、車室内から車両の前方を観察した様子を示している。視覚能力訓練装置100は、車両の車室内に設置され、ドライバーの前方の複数箇所、特に左前方、正面近傍、右前方の三カ所で光刺激をランダムに発生させて、ドライバーの前方認知力を強化することを目的とする。以下の説明においては、視覚能力訓練装置100によるランダムな光刺激によりドライバーの視覚能力を向上させる訓練を「視覚訓練」と称する。
【0015】
光刺激は、右ハンドルの車両72に着座したドライバー80の左前方、前方、および右前方にそれぞれ設定された、フロントガラス70上の発光位置60L、60C、60Rで発生する。光刺激の発光手段は、例えばLED(Light Emitting Diode)50であり、図2に示すように車両のダッシュボード78の上方に設置される。左LED50L(図3参照)は左発光位置60Lに対応し、中央LED50Cは中央発光位置60Cに対応し、右LED50Rは右発光位置60Rに対応する。各LEDから放射された光は、フロントガラス上の対応する発光位置で反射されて、ドライバー80によって観察される。このような反射方式とすることで、LEDをフロントガラスに直接取り付ける必要がなく、また訓練不実施時に前方視界を妨げることがない。三つのLED50L、50C、50Rは、後述するように視覚訓練ECU(Electronic Control Unit)によって制御される。
【0016】
発光位置60L、60C、60Rは、例えば以下のような位置に設定される。
左発光位置60L:ドライバーの前方視線に対して左向きに40°の方向
中央発光位置60C:ドライバーの前方視線に対して左向きに1.3°の方向
右発光位置60R:ドライバーの前方視線に対して右向きに20°の方向
左および右の発光位置は、ドライバー80の約3m先の車線左端76Lおよび右端76Rを観察することを意図して設定されている。この位置は、左右からの他車両の割り込みを検知するのに適している。中央発光位置は、自車の約1秒前を走行している先行車74の中心を観察することを意図して設定されている。なお、左ハンドルの車両の場合、上記の発光位置を左右反転させたものになる。
【0017】
なお、各LEDの色は任意であるが、背景環境に影響を受けにくい色であることが好ましい。左、中央、右LEDの色および輝度は、同一であっても異なっていてもよい。
【0018】
図3は、本実施形態に係る視覚能力訓練装置100の構成を示すブロック図である。視覚訓練ECU10の各ブロックは、ハードウェア的には、コンピュータのCPUやメモリをはじめとする素子や機械装置で実現でき、ソフトウェア的にはコンピュータプログラム等によって実現されるが、ここでは、それらの連携によって実現される機能ブロックとして描いている。したがって、これらの機能ブロックはハードウェア、ソフトウェアの組み合わせによっていろいろなかたちで実現できることは、当業者には理解されるところである。
【0019】
走行環境判定部12は、車両が走行中の環境が、上述の視覚訓練を実行するのに適切な環境であるか否かを判定する。具体的には、走行環境判定部12は、ナビゲーション装置30から走行中の道路が自動車専用道であるか否かの情報を、車速センサ32から自車速度を受け取る。また、走行環境判定部12は、赤外線レーザやミリ波などを前方に発信し先行車による反射波を検出する車間レーダ34からの情報を受け取り、先行車の有無を判定するとともに、先行車が存在する場合には車間距離を推定する。また、走行環境判定部12は、ブレーキペダルセンサ36およびアクセルペダルセンサ38から、それぞれのペダルが操作されているか否かの情報を受け取る。そして、走行環境判定部12は、これらの情報に基づいて、視覚訓練を実行するのに適切な環境であるかを判定する。この判定は、視覚訓練を実行してもドライバーの前方に対する注意力が削がれないようにするという観点から実行される。視覚訓練を実行するのに適切な環境であれば、走行環境判定部12は訓練制御部14に対して視覚訓練の開始を許可する。
【0020】
訓練制御部14は視覚訓練を実行する。具体的には、ドライバーの前方に設置された左LED50L、中央LED50C、右LED50Rによる発光位置の切り換えと、それぞれの発光タイミングとを制御する。左、中央、右のLEDの発光はランダムに切り換えられることが好ましい。
【0021】
視覚能力訓練装置100は、ドライバーが光刺激を認知したことを確かめるための入力機器40を選択的に備えていてもよい。この場合、視覚訓練ECU10は、操作受付部16、操作判定部18および結果表示部20を備える。
【0022】
操作受付部16は、入力機器40を用いたドライバーの確認操作入力を受け取る。入力機器40は、訓練専用のボタンやレバー等であってもよいが、通常の車両に設けられているボタンやレバー等と兼用させることが好ましい。例えば、ナビゲーション装置やオーディオ装置のボタン、ワイパーレバー、ステアリングスイッチなどが考えられる。視覚訓練の実行中は、これらの入力機器の本来の機能はキャンセルされるように構成される。
【0023】
入力機器40を用いたドライバーによる確認操作は、以下のようなものが考えられる。例えば、左LEDと右LEDの点灯時に、それぞれの光刺激を認知できたことを二つの入力機器で確認操作してもよい。または、左LEDまたは右LEDのいずれか一方の点灯時のみに、光刺激を認知できたことを一つの入力機器で確認操作してもよい。後述するように、右ハンドルの車両では一般に左LEDの認知率が低いので、左LEDの点灯時のみに確認操作させるようにしてもよいし、ドライバーが左LEDと右LEDのいずれかを選択できるようにしてもよい。
【0024】
操作判定部18は、ドライバーによる確認操作が正しいか否かを判定する。具体的には、訓練制御部14から左、中央、右のLEDのうちいずれを点灯させたかの情報を受け取り、その時点から所定時間内に対応する確認操作が操作受付部16により受け取られていた場合、ドライバーが光刺激を正しく認知したと判定する。
【0025】
結果表示部20は、操作判定部18による確認操作の判定結果に基づき、例えば正解率などの訓練結果をナビゲーション装置やインストルメンタルパネル上のディスプレイ42に表示する。これによって、ドライバーは視覚訓練の結果を直ちに知ることができる。
【0026】
結果表示部20の代わりに、またはこれに加えて、訓練結果を外部メモリ等に出力する結果出力部を設け、降車後に訓練結果をパーソナルコンピュータ等で確認できるようにしてもよい。
【0027】
図4は、走行環境判定部12による、視覚訓練を実行するための条件を判定する処理のフローチャートである。このフローは、車両走行中に所定の間隔(例えば数秒毎)に繰り返し実行される。
【0028】
走行環境判定部12は、ナビゲーション装置30からの情報に基づき、走行中の道路が自動車専用道であるか否かを判定する(S10)。自動車専用道であるか否かは、走行中の道路の属性データに基づき判別することができる。自動車専用道であることを判定する理由は、自動車専用道であれば車両を右左折させる頻度が少なくステアリング操作も少ないので、視覚訓練を実施してもドライバーの注意力を削ぐ恐れがないと考えられるためである。代替的に、舵角センサにより取得されたステアリングホイールの舵角が所定の角度以下であるか、すなわち車両が直進走行中であるか否かを判定してもよい。
【0029】
続いて、走行環境判定部12は、車速センサ32からの情報に基づき、車速が所定値V(例えば、30km/h)以上であるか否かを判定する(S12)。この判定は、車速を落としているときは信号や右左折など注意を払う対象が多いことを考慮し、車両が巡航しているときに訓練を実施するために行われる。
【0030】
走行環境判定部12は、車間レーダ34からの情報に基づき、所定の車間距離D(例えば、自車両の車速で1秒分離れている距離)以上離れた先行車が存在するか否かを判定する(S14)。本実施形態の視覚訓練は、ドライバーが先行車を前方注視している状態で実行することが好ましいためである。
【0031】
さらに、走行環境判定部12は、ブレーキペダルセンサ36およびアクセルペダルセンサ38からの情報に基づき、急減速または急加速がされていないか否かを判定する(S16)。この判定を行う理由は、急減速または急加速時には車両周辺環境が大きく変化するので、ドライバーの注意力を視覚訓練に向けるのは好ましくないと考えられるからである。
【0032】
S10〜S16のいずれかで判定が否定的であるとき、走行環境判定部12は視覚訓練を許可しない。したがって、訓練制御部14は視覚訓練を開始しないか、実施中である場合には直ちに中断する(S24)。S10〜S16のいずれの判定も肯定的であるとき、走行環境判定部12は視覚訓練を許可する。これに応じて、訓練制御部14は視覚訓練を開始するか、すでに実行中である場合はそのまま継続する(S18)。
【0033】
走行環境判定部12は、視覚訓練の許可時から時間を計測し、所定の時間(例えば、10分)が経過すると(S20のY)、視覚訓練を終了するよう訓練制御部14に指令する(S22)。視覚訓練は例えば一日に一回までとし、走行環境判定部12は、訓練の終了後は日付が変わるまで図4のフローを実行しないことが好ましい。
【0034】
以上のように、適切な走行環境時であるときのみ視覚訓練を実行することで、前方(特に先行車)に対するドライバーの注意が散漫になるのを防止することができる。
【0035】
以下では、上述の実施形態に係る視覚能力訓練装置の有効性を検証した実験結果について説明する。
【0036】
この実験では、まず所定の条件で20歳代および50歳代の被験者に対して視覚訓練を実行した後、認知率の向上を確認するためのテストを行った。視覚訓練の条件は以下の通りである。
発光位置:図1の視覚能力訓練装置と同様に、左、中央、右の三カ所
LED色:緑色
一回の点灯時間:約50ミリ秒
制御:三つのLEDを約2秒間隔でランダムに点灯
【0037】
図5は、認知率テストを実施した車両72’の構成を示す模式図である。このテスト車両72’では、認知率テスト用のLED62L、62C、62Rを車両のボンネット76上に立てた三つのポール上に設置した。但し、ドライバー80からLED62L、62C、62Rへの視線とフロントガラス70付近との交点が、図1の発光位置60L、60C、60Rにそれぞれ対応するようにポールの設置位置を調整した。
【0038】
上記の視覚訓練を5日間、一日一回ずつ実行し、一回の訓練が終了する毎に認知率のテストを実行した。このテストでは、左、中央、右の三通りの操作入力ができる入力機器を使用し、LEDの点灯後所定の時間以内にドライバーからの確認操作があったときに正解と判定した。テストコースを走行中に直線区間で認知率テストを実施し、一周当たりLEDを合計10回点灯させることを5〜6周繰り返した。その他のテストの条件は以下の通りである。
LED色:赤色
一回の点灯時間:1秒
制御:三つのLEDを5〜7秒間隔(平均6秒間隔)でランダムに点灯
【0039】
図6は、20歳代の被験者に対する認知率テストの結果を示し、図7は50歳代の被験者に対する認知率テストの結果を示す。いずれも、横軸は訓練実行回数を示し、縦軸は左LED、中央LED、右LEDからの光刺激に対するドライバーの解答操作の正解率を示す。
【0040】
20歳代の被験者の場合、中央と右の光刺激に対する正解率は訓練前から高率であり、訓練を重ねてもほとんど変化しない。これと比べて左の光刺激に対する正解率は訓練前にはかなり低いものの、二回の訓練で大きく向上していることが分かる。50歳代の被験者の場合、中央の光刺激に対する正解率は訓練前から高率であるのに対し、左および右の光刺激に対する訓練前の正解率は、20歳代よりもかなり低い。しかしながら、訓練を重ねるにつれ、正解率が次第に向上していることが分かる。50歳代において、二回目の訓練後の正解率が一回目よりも低下しているのは、慣れの影響が出ていると考えられる。しかし、その後も訓練を続けることで、正解率は回復している。
【0041】
以上説明したように、本実施形態の視覚能力訓練装置によれば、ドライバーが車両を運転しているときに、ドライバーの左右前方で瞬間的に光刺激を発生させる視覚訓練を実行する。これにより、ドライバーの左右の周辺視野における視覚能力を鍛えることができる。左右の周辺視野は、交差点等において右または左方向から進入してくる車両や、追い越し、割り込みをしてくる車両を早期に発見するために重要である。
【0042】
また、走行環境判定部によって所定の走行環境にあるときにのみ視覚訓練が許可されるので、訓練によってドライバーの注意力を散漫にすることが防止される。特に、車間距離が所定値以上である先行車が存在しているときに視覚訓練が実行されるため、ドライバーは先行車に対して注意を払っており、視線が光刺激の方向に向くことを防止できる。そのため、周辺視野を効率的に鍛えることができる。
【0043】
以上、本発明を実施の形態をもとに説明した。これらの実施の形態はあくまで例示であり、実施の形態どうしの任意の組み合わせ、実施の形態の各構成要素や各処理プロセスの任意の組み合わせなどの変形例もまた、本発明の範囲にあることは当業者に理解されるところである。
本発明は、上述の各実施形態に限定されるものではなく、当業者の知識に基づいて各種の設計変更等の変形を加えることも可能である。各図に示す構成は、一例を説明するためのもので、同様な機能を達成できる構成であれば、適宜変更可能である。
【0044】
実施の形態では、左、中央、右の三カ所で光刺激を発生させることを述べた。しかしながら、左と右の二カ所、あるいは左または右の一カ所でのみ光刺激を発生させるように視覚能力訓練装置を構成してもよい。また、必要に応じて、光刺激の発生箇所を四カ所以上にしてもよい。
【符号の説明】
【0045】
10 視覚訓練ECU、 12 走行環境判定部、 14 訓練制御部、 16 操作受付部、 18 操作判定部、 20 結果表示部、 30 ナビゲーション装置、 32 車速センサ、 34 車間レーダ、 36 ブレーキペダルセンサ、 38 アクセルペダルセンサ、 40 入力機器、 42 ディスプレイ、 50 LED、 60 発光位置、 100 視覚能力訓練装置。
【特許請求の範囲】
【請求項1】
着座したドライバーの少なくとも左前方および右前方にそれぞれ設定された発光位置において、ドライバーの視覚認知を引き出すための光刺激を発生させる発光手段と、
車両の走行環境を取得し、前記光刺激の発生を許可するための所定の走行環境であるか否かを判定する判定手段と、
前記判定手段により所定の走行環境であると判定されたとき、前記発光手段による光刺激の発生タイミングと前記発光位置の切り換えとを制御する制御手段と、
を備える車両用視覚能力訓練装置。
【請求項2】
前記判定手段は、所定の車間距離以上開いた先行車が存在することを前記所定の走行環境として含むことを特徴とする請求項1に記載の車両用視覚能力訓練装置。
【請求項3】
前記制御手段は、前記発光手段から光刺激をランダムに発生させることを特徴とする請求項1または2に記載の車両用視覚能力訓練装置。
【請求項4】
前記発光手段による光刺激をドライバーが認知したときに所定の入力機器を使用して行う確認操作を受け付ける操作受付手段をさらに備えることを特徴とする請求項1ないし3のいずれかに記載の車両用視覚能力訓練装置。
【請求項1】
着座したドライバーの少なくとも左前方および右前方にそれぞれ設定された発光位置において、ドライバーの視覚認知を引き出すための光刺激を発生させる発光手段と、
車両の走行環境を取得し、前記光刺激の発生を許可するための所定の走行環境であるか否かを判定する判定手段と、
前記判定手段により所定の走行環境であると判定されたとき、前記発光手段による光刺激の発生タイミングと前記発光位置の切り換えとを制御する制御手段と、
を備える車両用視覚能力訓練装置。
【請求項2】
前記判定手段は、所定の車間距離以上開いた先行車が存在することを前記所定の走行環境として含むことを特徴とする請求項1に記載の車両用視覚能力訓練装置。
【請求項3】
前記制御手段は、前記発光手段から光刺激をランダムに発生させることを特徴とする請求項1または2に記載の車両用視覚能力訓練装置。
【請求項4】
前記発光手段による光刺激をドライバーが認知したときに所定の入力機器を使用して行う確認操作を受け付ける操作受付手段をさらに備えることを特徴とする請求項1ないし3のいずれかに記載の車両用視覚能力訓練装置。
【図1】



【図2】
【図3】
【図4】
【図5】

【図6】

【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2012−50690(P2012−50690A)
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願番号】特願2010−195711(P2010−195711)
【出願日】平成22年9月1日(2010.9.1)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【公開日】平成24年3月15日(2012.3.15)
【国際特許分類】
【出願日】平成22年9月1日(2010.9.1)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
[ Back to top ]