
車両用診断装置
【課題】車両の故障診断を目的に車両の走行位置履歴を定期的に記録する構成において、運転者のプライバシーを保護することができる車両用診断装置を提供する。
【解決手段】ナビゲーション装置は、メータから取得した走行距離を速度補正し、マップマッチングにより地図の道路上となるように補正する。このとき、速度補正値が不適切な場合は、マップマッチングした2点の移動距離とそれに対応する絶対位置座標を演算して求めた移動距離との誤差が大きくなるので(ステップ106:NO)、現在位置ずれ状態であると判断し、ハードディスク装置に相対位置履歴を記憶する(ステップ112またはステップ114)。従って、修理作業者は、ハードディスク装置に記憶されている相対位置履歴に基づいて車速補正値が不適切であると判断したときは、車速補正値を適切となるように修正する。
【解決手段】ナビゲーション装置は、メータから取得した走行距離を速度補正し、マップマッチングにより地図の道路上となるように補正する。このとき、速度補正値が不適切な場合は、マップマッチングした2点の移動距離とそれに対応する絶対位置座標を演算して求めた移動距離との誤差が大きくなるので(ステップ106:NO)、現在位置ずれ状態であると判断し、ハードディスク装置に相対位置履歴を記憶する(ステップ112またはステップ114)。従って、修理作業者は、ハードディスク装置に記憶されている相対位置履歴に基づいて車速補正値が不適切であると判断したときは、車速補正値を適切となるように修正する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の走行位置履歴に基づいて車両の異常を診断可能とする車両用診断装置に関する。
【背景技術】
【0002】
車両の故障診断用に車両の走行履歴情報を記録する装置として、特許文献1のものがある。このものは、車両の車速等の走行データや走行履歴を記録し、故障が発生した場合には、これらの走行履歴情報に基づいて修理作業者が故障解析を行うようになっている。
【特許文献1】特開平11−125584号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、特許文献1のものでは、専門知識を持った者であれば、走行位置履歴などの運転者のプライバシーに関わる情報についても、容易に記録した情報から取り出すことができ、個人のプライバシー保護の観点から問題を有する。
【0004】
本発明は上記事情に鑑みてなされたもので、その目的は、車両の故障診断を目的に車両の走行位置履歴を定期的に記録する構成において、運転者のプライバシーを保護することができる車両用診断装置を提供することにある。
【課題を解決するための手段】
【0005】
請求項1の発明によれば、異常判断手段が車両の異常を検出したときは、現在位置履歴記憶手段は、現在位置取得手段が取得した現在位置の変化を相対位置座標で順に記憶する。これにより、修理作業者が車両の異常を診断するために走行位置履歴を読取るにしても、その走行位置履歴は相対位置座標で記憶されているので、異常の原因究明を可能にしながら、走行位置履歴が絶対座標で読取られることはない。つまり、読み出せる記録は断片的な相対位置座標であり、第三者には走行位置履歴の絶対位置座標は分らず、個人のプライバシーを保護することができる。
【0006】
請求項2の発明によれば、車両の車速を補正するための車速補正値が不適切な場合は、現在位置取得手段が取得した現在位置に基づく移動距離と走行距離取得手段が取得した走行距離に基づく移動距離との誤差が大きくなるので、その誤差が所定の許容範囲を上回った場合は、現在位置ずれを生じたと判断することができる。
【0007】
請求項3の発明によれば、通常時に走行位置履歴を記憶するにしても、その走行履歴は暗号化されているので、修理作業者が走行履歴を読取るにしても、走行位置を知ることはできない。また、運転者の了解を得て暗号化された情報も使用する場合は、故障時点での絶対位置座標を明らかにできるため、さらに幅広い故障診断を行うことができる。
【発明を実施するための最良の形態】
【0008】
(第1実施例)
以下、本発明をナビゲーション装置に適用した第1実施例について図1ないし図5を参照して説明する。
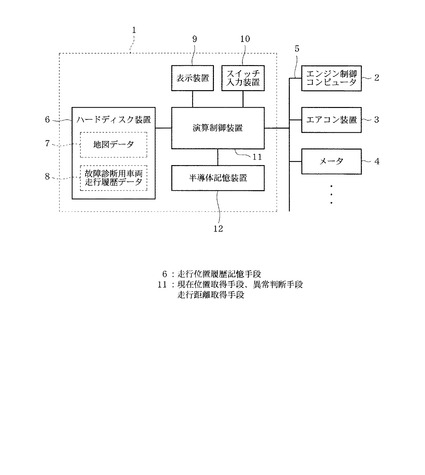
図1は、ナビゲーション装置の構成を示すブロック図である。この図1において、ナビゲーション装置1には、エンジン制御コンピュータ2、エアコン装置3、メータ4等の各種車載装置が通信ライン5等により接続されている。ナビゲーション装置1は、ナビゲーション装置1自身が有する機能を利用して、これらの各車載装置の故障診断を行うようになっている。ナビゲーション装置1のハードディスク装置(走行位置履歴記憶手段に相当)6は、地図データ7を格納する記憶手段として設けられているが、大容量であるため、本発明では空きスペースを利用して車両の車速等の走行データや走行位置履歴を故障診断用車両走行履歴データ8として記録する補助記憶手段としても機能するようになっている。
【0009】
表示装置9は液晶表示器からなり、ナビゲーション用の地図等を表示する。スイッチ入力装置10は、操作パネル上のボタンスイッチ、画面上のタッチスイッチ、またはリモコン等のナビゲーション装置を操作するためのものである。演算制御装置(現在位置取得手段、異常判断手段、走行距離取得手段に相当)11は、ナビゲーション装置1の中央制御を司る。半導体記憶装置12はナビゲーション装置1の各種情報を一時的に記憶するためのRAMまたはFlash・ROM等からなり、書き換え可能となっている。
【0010】
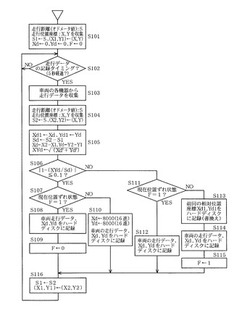
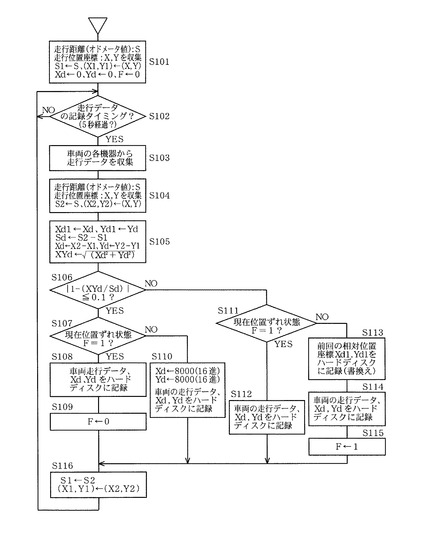
図2は、本装置により車両の車速等の走行データや走行位置履歴を記録する場合のフローチャートの一例を示している。この場合、ナビゲーション装置1は、走行位置履歴を記憶する場合は、ナビゲーション装置1自身が有するマップマッチング等のナビゲーション機能を利用するようになっている。ナビゲーション装置1は、ステップ101において、GPS情報等から演算した絶対位置座標(緯度:X、経度:Y)、およびメータ4から車両の走行距離(オドメータ値)Sを収集し、一時記憶エリアであるS1、X1、Y1にそれぞれ格納する。また、内部変数Xd、Yd、Fを初期化する。この場合、車両の走行距離(オドメータ値)Sはあらかじめ設定された車速補正値により補正されたデータである。
【0011】
ステップ102では、次のデータ記録タイミング、例えば5秒経過するまでループし、次のデータ記録タイミングになったときは、ステップ103へ進み、エンジン制御コンピュータ2、エアコン装置3、メータ4等から車両の走行データを収集する。例えばエンジン制御コンピュータ2からはエンジン回転数、燃料噴射量、点火角度など、エアコン装置3からは設定温度、内気温、外気温など、メータ4からは車速などの情報を収集する。
【0012】
次にステップ104へ進み、GPS情報等から演算した絶対位置座標(緯度:X、経度:Y)、およびメータ4から車両の走行距離(オドメータ値)Sを収集し、一時記憶エリアであるS2、X2、Y2にそれぞれ格納してから、ステップ105に進み、Xd、Ydの値をXd1、Yd1にそれぞれ退避する。このとき、メータ4から取得した走行距離(オドメータ値)から求められる移動距離SdをS2−S1により求める。また、絶対位置座標を地図の道路上にマップマッチングした補正位置座標の差(X2−X1)および(Y2−Y1)から相対位置座標Xd、Ydを求め、さらにそれらの間の移動距離XYdを(Xd2+Yd2)の平方根により求める。この場合、移動距離Sdは車速補正されたデータであり、移動距離XYdは絶対値座標によるデータである。
【0013】
ここで、GPSの受信状態、GPSアンテナの接続状態、車速補正などの受信環境が適切であり、現在位置ずれを生じていない場合、つまり車速補正が適切な場合は、車速情報等から演算した絶対位置座標から求められる移動距離と、メータ4から取得した走行距離(オドメータ値)から求められる移動距離とはほぼ一致するはずであるから、それらの誤差に基づいて受信環境が適切かを判断することができる。
【0014】
即ち、ステップ106において、車速センサからの走行距離(オドメータ値)から求められる移動距離Sdと、補正位置座標から演算した移動距離XYdとの誤差が、あらかじめ決められた値より小さい場合には、現在位置ずれが発生していないと判断してステップ107に進み、あらかじめ決められた値より大きい場合には、現在位置ずれが発生していると判断してステップ111に進む。具体的には、補正位置座標から演算した移動距離XYdと、車速センサからの走行距離(オドメータ値)から求められる移動距離Sdとの比を求めて、その値が、0.9から1.1の間にあるか否かで判定する。
【0015】
ステップ107では、前回の記録タイミングで現在位置ずれが発生していたと判断した場合にはF=1、現在位置ずれが発生していなかったと判断した場合にはF=0となる内部変数Fの値を調べて、F=1の場合にはステップ108へ進み、F=0の場合にはステップ110に進む。
【0016】
ここで、上述のように現在位置ずれが発生した場合には、その前後の記録タイミングでの相対位置座標も記録する。したがって、ステップ108では、前回の記録タイミングで現在位置ずれが発生していたと判断したため、今回の走行データと相対位置座標Xd、Ydをデータの発生タイミングがわかるように、時刻等のタイムスタンプと同時にそのままハードディスク装置6の故障診断用車両走行履歴データ8に記録し、ステップ109でFに0を書き込んでからステップ116へ進む。
【0017】
ステップ110では、前回も今回も現在位置ずれが発生していないと判断したため、走行位置履歴を記録せず、相対位置座標Xd、Ydはダミーの固定値、例えば8000(16進)として、車両の走行データとともに時刻等のタイムスタンプと同時にハードディスク装置6の故障診断用車両走行履歴データ8に記録してステップ116へ進む。
【0018】
一方、ステップ111では、前回の記録タイミングで現在位置ずれが発生していたと判断した場合にはF=1、現在位置ずれが発生していなかったと判断した場合にはF=0となる内部変数Fの値を調べて、F=1の場合にはステップ112へ進み、F=0の場合にはステップ113に進む。ステップ112では、現在位置ずれが発生していると判断したため、走行データと相対位置座標Xd、Ydをデータの発生タイミングがわかるように、時刻等のタイムスタンプと同時にそのままハードディスク装置6の故障診断用車両走行履歴データ8に記録してステップ116へ進む。ステップ113では、F=0、すなわち前回の記録タイミングで現在位置ずれが発生していないと判断したが、現在位置ずれが発生した場合には、その前後の記録タイミングでの相対位置座標も記録するため、前回の相対位置座標Xd1、Yd1によりハードディスク装置6の故障診断用車両走行履歴データ8に前回記録したXd、Ydを書き換える。そして、ステップ114において、走行データと相対位置座標Xd、Ydをデータの発生タイミングがわかるように、時刻等のタイムスタンプと同時にそのままハードディスク装置6の故障診断用車両走行履歴データ8に記録し、ステップ115でFに1を書込んでからステップ116へ進む。
【0019】
ステップ116では、次回の記録タイミングでの基準となるデータとして一時記憶エリアS1、X1、Y1のデータをS2、X2、Y2のデータでそれぞれ書き換えてステップ102に戻る。
以上のような動作により、現在位置ずれが発生した場合は、ハードディスク装置6の故障診断用車両走行履歴データ8に車両の相対位置座標に加えて車両の走行データが記憶される。
【0020】
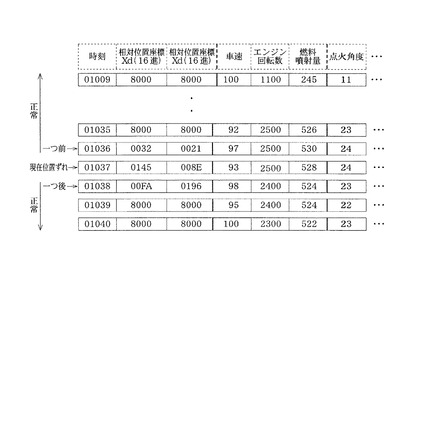
図3に、ハードディスク装置6の故障診断用車両走行履歴データ8に記録したデータの一例を示す。ハードディスク装置6の故障診断用車両走行履歴データ8には、時刻とともに、相対位置座標、車速、エンジン回転数、燃料噴射量、点火角度などの車両の走行データが記録される。なお、図3に示す記録例では、時刻01009から01035では位置座標から演算した移動距離XYdと、車速センサからの走行距離(オドメータ値)から求められる移動距離Sdとの差が小さく、正常(通常)であると判断し、相対位置座標Xd、Ydは固定値8000(16進)を記録している。また、時刻01036及び時刻01038以降もXYdとSdとの差が小さく正常(通常)であるが、時刻01037でXYdとSdの差が大きく現在位置ずれを生じたため、時刻01037及び前後の時刻01036、時刻01038については、相対位置座標Xd、Ydをそのまま記録している。そして、時刻01039以降においては、相対位置座標Xd、Ydとして固定値8000(16進)を記録している。
つまり、ナビゲーション装置1は、上述のようにして現在位置ずれを生じたと判断したときは、その現在位置ずれの判断期間を含むように車両の走行経路を相対位置座標で記憶するのである。
【0021】
さて、現在位置ずれを生じる要因として車速補正の不適切が考えられる。
図4は、車速補正が不適切な場合の走行位置履歴(相対位置座標)の一例を二次元の座標上に表した例を示す。パターンAは、相対位置座標を示す直線BCで現在位置ずれが発生し、その前後の直線AB、直線CDも記録されている状態を示している。直線AB、直線CDでは現在位置ずれが発生していないと判断しているため、マップマッチングにより道路上をトレースしていると考えられる。従って、直線AB、直線CDを延長した線(図4中に破線で示した線)が地図の道路上と考えられる。このパターンAの場合は、地図上の交差点に到達する前に、実際には交差点で右折したと考えられる。このようなパターンAが発生する場合は、装着された車輪の直径等による車速センサの補正値が小さいために、実際の走行距離よりも短く表示されていると考えられる。
このようにパターンAと判断する条件としては、直線ABと直線CDのなす角度が90°±45°の間で、且つ直線ABと直線BCのなす角度が90°以下の場合である。
【0022】
パターンBでは、実際の交差点に到達していないのに、地図上では通過したと表示した場合であり、車速センサの補正値が大きいために、実際の走行距離よりも長く表示されていると考えられる。
このようにパターンBと判断する条件としては、直線ABと直線CDのなす角度が90°±45°の間で、且つ直線ABと直線BCのなす角度が90°より大きい場合である。
【0023】
また、パターンCでは、平行した道路を1本間違えた場合であり、これは一般的に道路形状等により判定が難しい場合が多い。
このようにパターンCと判断する条件としては、直線ABと直線CDのなす角度が±45°以内で、且つ直線ABと直線BCのなす角度が90°以下の場合である。
ユーザは、ナビゲーション装置1で上述のような現在位置ずれが発生したときは、何らかの異常が発生したと判断して修理作業者に修理を依頼する。
【0024】
修理作業者は、ユーザからナビゲーション装置1の修理を依頼された場合は、ハードディスク装置6の故障診断用車両走行履歴データ8を解析する。
図5は、現在位置ずれに対する故障診断の解析手順例を示している。ステップ301において、修理作業者は、ハードディスク装置6の故障診断用車両走行履歴データ8に記録した有効な走行位置履歴の記録(ダミーで書き込んでいる8000(16進)以外の有効データ)があるかを検索する。ステップ302において、有効な走行位置履歴の記録がない場合はステップ303へ進み異常なしと判断する。有効な走行位置履歴の記録がある場合はステップ304へ進み、走行位置履歴の記録がある時刻の前後のGPS情報を読み込む。ステップ305に進み、走行位置履歴の記録がある時刻の前後においてGPSの受信レベルが正常かを判断する。正常でない場合には、ステップ306へ進み、その異常が継続的に続いているか一時的に発生しているかを判定する。一時的な異常の場合はステップ307へ進み、ビル陰やトンネル等での受信不良が発生したと推定する。継続的に続いている場合はステップ308へ進み、GPSアンテナ、ワイヤハーネスおよびコネクタの不良と推定して点検を実施する。
【0025】
ステップ305において、走行位置履歴の記録がある時刻の前後においてGPSの受信レベルが正常な場合には、ステップ309へ進み、走行位置履歴(相対位置座標)の二次元座標上での形状が、図4のパターンAに該当するかを判定する。パターンAに該当する場合は、ステップ310へ進み、車速補正値が小さいと判定する。パターンAに該当しない場合は、ステップ311へ進み、走行位置履歴(相対位置座標)の二次元座標上での形状が、図4のパターンBに該当するかを判定する。パターンBに該当する場合は、ステップ312へ進み、車速補正値が大きいと判定する。パターンBに該当しない場合は、ステップ313へ進み、走行位置履歴(相対位置座標)の二次元座標上での形状が、図4のパターンCに該当するかを判定する。パターンCに該当する場合は、ステップ314へ進み、異常なし(実力レベル)と判定する。
【0026】
一方、以上の何れの判定に当てはまらない場合は、ステップ315に進み、地図データに登録されていない新設道路等を走行した場合と推定できる。従って、運転者の協力を得て走行した場所を明確にする必要があるものの、上述したように相対位置座標のみを記録することにより、特殊な場合以外は、現在位置ずれの原因を推定できる。
【0027】
このような実施例によれば、GPS情報等から演算した絶対位置座標から求めた移動距離と、メータ4から取得した車両の走行距離から求めた移動距離との比較に基づいて現在位置ずれと判断したときは、車両の走行位置履歴として相対位置座標を記憶するようにしたので、走行位置履歴を絶対位置座標で記憶する従来例のものと違って、読み出せる記録は断片的な相対位置座標であり、第三者には走行位置履歴の絶対位置座標は分らず、個人のプライバシーを保護することができる。
しかも、このように優れた効果を奏する構成は、プログラムの変更のみで実施することができるので、ナビゲーション装置1を大幅に改造することなく低コストで実施することができる。
【0028】
(第2実施例)
次に、本発明の第2実施例について図6及び図7を参照して説明する。
上記の第1実施例では、現在位置ずれを生じていない通常状態では、走行データを記録しないようにしたが、絶対位置座標のみを第三者に分らないように暗号化して記録することもできる。この場合、車両の修理作業者は暗号化された情報以外は自由に見られるため、それらにより故障診断を実施することができる。
また、運転者の了解を得て暗号化された情報も使用すれば、故障時点での絶対位置座標を明らかにできるため、地図データに登録されていない新設道路を走行した場合等、さらに幅広い故障診断を行うことができる。
【0029】
図6は、システム構成を示すブロック図である。この図6のシステム構成図では、ハードディスク装置6の故障診断用車両走行履歴データ8の中に暗号化領域8aを追加した以外は図1と同じである。
【0030】
図7は、車両の車速等の走行データや走行位置履歴を記録する場合のフローチャートの一例であり、基本的には第1実施例の図2と同じである。ステップ201において、ナビゲーション装置1は、GPS情報等から演算した絶対位置座標(緯度:X、経度:Y)、およびメータ4から車両の走行距離(オドメータ値)Sを収集し、一時記憶エリアであるS1、X1、Y1にそれぞれ格納する。ステップ202では、絶対位置座標X1、Y1を、ハードディスク装置6の故障診断用車両走行履歴データ8の暗号化領域8aに時刻等のタイムスタンプと同時に記録する。このデータは暗号キーを持たない第三者は見ることができない。ステップ203以降はハードディスク装置6への書込みステップのみ図2と異なる。
【0031】
即ち、ステップ211では、現在位置ずれが発生していないと判定したため、ハードディスク装置6の故障診断用車両走行履歴データ8の暗号化領域8aに相対位置座標Xd、Ydを時刻等のタイムスタンプと同時に記録する。このデータは暗号キーを持たない第三者は見ることができない。そして、暗号化領域以外には相対位置座標Xd、Ydは固定値、例えば8000(16進)として、車両の走行データとともに時刻等のタイムスタンプと同時に記録する。ステップ209、ステップ213、ステップ214、ステップ215では、現在位置ずれが発生したと判断したため、または、その前後の相対位置座標の記録ステップであるため、ハードディスク装置6の故障診断用車両走行履歴データ8の暗号化領域8a以外に記録する。
【0032】
故障診断の解析手順については、暗号化された情報以外を使用する場合は、第1の実施例と同様である(図5参照)。
しかし、運転者の了解を得て暗号化された情報も使用する場合は、故障時点での絶対位置座標を明らかにできるため、さらに幅広い故障診断を行うことができる。例えば、現在位置ずれが、地図データに登録されていない新設道路であることが明確にできる。また、現在位置ずれ以外の故障診断においても、例えばエンジン制御コンピュータやエアコン装置との通信異常が特定の場所で発生する場合、その場所が電波送信施設や電力施設の近くであれば、それらの施設からの電気的なノイズの影響と推定できる。
【0033】
本発明は、上記各実施例に限定されることなく、次のように変形または拡張できる。
本実施例では、現在位置ずれの判定は、メータ4からの走行距離(オドメータ値)から求められる移動距離と、絶対位置座標から演算した移動距離との差が、あらかじめ決められた値より大きい場合としたが、位置座標から演算した移動距離(直線距離)ではなく、実際に地図画面上を移動した道のり距離とすれば、より正確な判定ができる。
車速補正の診断結果をユーザに報知することにより、ユーザが車速補正値を修正できるようにしてもよい。
【図面の簡単な説明】
【0034】
【図1】本発明の第1実施例におけるナビゲーション装置の電気的構成を示す機能ブロック図
【図2】ナビゲーション装置の動作を示すフローチャート
【図3】ハードディスク装置の記録データの一例を示す図
【図4】車速補正が不適切な場合の走行位置履歴の一例を示す図
【図5】現在位置ずれに対する故障診断の解析手順例を示すフローチャート
【図6】本発明の第2実施例を示す図1相当図
【図7】図2相当図
【符号の説明】
【0035】
図面中、1はナビゲーション装置、6はハードディスク装置(走行位置履歴記憶手段)、11は演算制御手段(現在位置取得手段、異常判断手段、走行距離取得手段)である。
【技術分野】
【0001】
本発明は、車両の走行位置履歴に基づいて車両の異常を診断可能とする車両用診断装置に関する。
【背景技術】
【0002】
車両の故障診断用に車両の走行履歴情報を記録する装置として、特許文献1のものがある。このものは、車両の車速等の走行データや走行履歴を記録し、故障が発生した場合には、これらの走行履歴情報に基づいて修理作業者が故障解析を行うようになっている。
【特許文献1】特開平11−125584号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
しかしながら、特許文献1のものでは、専門知識を持った者であれば、走行位置履歴などの運転者のプライバシーに関わる情報についても、容易に記録した情報から取り出すことができ、個人のプライバシー保護の観点から問題を有する。
【0004】
本発明は上記事情に鑑みてなされたもので、その目的は、車両の故障診断を目的に車両の走行位置履歴を定期的に記録する構成において、運転者のプライバシーを保護することができる車両用診断装置を提供することにある。
【課題を解決するための手段】
【0005】
請求項1の発明によれば、異常判断手段が車両の異常を検出したときは、現在位置履歴記憶手段は、現在位置取得手段が取得した現在位置の変化を相対位置座標で順に記憶する。これにより、修理作業者が車両の異常を診断するために走行位置履歴を読取るにしても、その走行位置履歴は相対位置座標で記憶されているので、異常の原因究明を可能にしながら、走行位置履歴が絶対座標で読取られることはない。つまり、読み出せる記録は断片的な相対位置座標であり、第三者には走行位置履歴の絶対位置座標は分らず、個人のプライバシーを保護することができる。
【0006】
請求項2の発明によれば、車両の車速を補正するための車速補正値が不適切な場合は、現在位置取得手段が取得した現在位置に基づく移動距離と走行距離取得手段が取得した走行距離に基づく移動距離との誤差が大きくなるので、その誤差が所定の許容範囲を上回った場合は、現在位置ずれを生じたと判断することができる。
【0007】
請求項3の発明によれば、通常時に走行位置履歴を記憶するにしても、その走行履歴は暗号化されているので、修理作業者が走行履歴を読取るにしても、走行位置を知ることはできない。また、運転者の了解を得て暗号化された情報も使用する場合は、故障時点での絶対位置座標を明らかにできるため、さらに幅広い故障診断を行うことができる。
【発明を実施するための最良の形態】
【0008】
(第1実施例)
以下、本発明をナビゲーション装置に適用した第1実施例について図1ないし図5を参照して説明する。
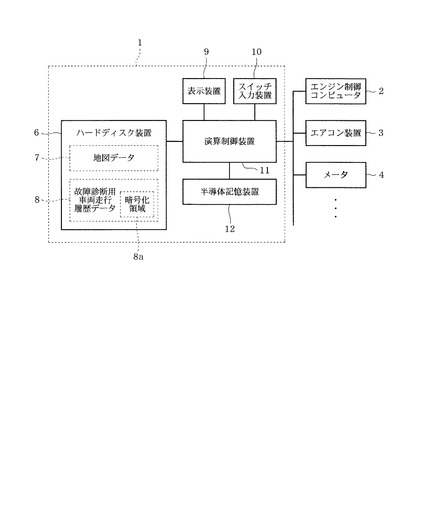
図1は、ナビゲーション装置の構成を示すブロック図である。この図1において、ナビゲーション装置1には、エンジン制御コンピュータ2、エアコン装置3、メータ4等の各種車載装置が通信ライン5等により接続されている。ナビゲーション装置1は、ナビゲーション装置1自身が有する機能を利用して、これらの各車載装置の故障診断を行うようになっている。ナビゲーション装置1のハードディスク装置(走行位置履歴記憶手段に相当)6は、地図データ7を格納する記憶手段として設けられているが、大容量であるため、本発明では空きスペースを利用して車両の車速等の走行データや走行位置履歴を故障診断用車両走行履歴データ8として記録する補助記憶手段としても機能するようになっている。
【0009】
表示装置9は液晶表示器からなり、ナビゲーション用の地図等を表示する。スイッチ入力装置10は、操作パネル上のボタンスイッチ、画面上のタッチスイッチ、またはリモコン等のナビゲーション装置を操作するためのものである。演算制御装置(現在位置取得手段、異常判断手段、走行距離取得手段に相当)11は、ナビゲーション装置1の中央制御を司る。半導体記憶装置12はナビゲーション装置1の各種情報を一時的に記憶するためのRAMまたはFlash・ROM等からなり、書き換え可能となっている。
【0010】
図2は、本装置により車両の車速等の走行データや走行位置履歴を記録する場合のフローチャートの一例を示している。この場合、ナビゲーション装置1は、走行位置履歴を記憶する場合は、ナビゲーション装置1自身が有するマップマッチング等のナビゲーション機能を利用するようになっている。ナビゲーション装置1は、ステップ101において、GPS情報等から演算した絶対位置座標(緯度:X、経度:Y)、およびメータ4から車両の走行距離(オドメータ値)Sを収集し、一時記憶エリアであるS1、X1、Y1にそれぞれ格納する。また、内部変数Xd、Yd、Fを初期化する。この場合、車両の走行距離(オドメータ値)Sはあらかじめ設定された車速補正値により補正されたデータである。
【0011】
ステップ102では、次のデータ記録タイミング、例えば5秒経過するまでループし、次のデータ記録タイミングになったときは、ステップ103へ進み、エンジン制御コンピュータ2、エアコン装置3、メータ4等から車両の走行データを収集する。例えばエンジン制御コンピュータ2からはエンジン回転数、燃料噴射量、点火角度など、エアコン装置3からは設定温度、内気温、外気温など、メータ4からは車速などの情報を収集する。
【0012】
次にステップ104へ進み、GPS情報等から演算した絶対位置座標(緯度:X、経度:Y)、およびメータ4から車両の走行距離(オドメータ値)Sを収集し、一時記憶エリアであるS2、X2、Y2にそれぞれ格納してから、ステップ105に進み、Xd、Ydの値をXd1、Yd1にそれぞれ退避する。このとき、メータ4から取得した走行距離(オドメータ値)から求められる移動距離SdをS2−S1により求める。また、絶対位置座標を地図の道路上にマップマッチングした補正位置座標の差(X2−X1)および(Y2−Y1)から相対位置座標Xd、Ydを求め、さらにそれらの間の移動距離XYdを(Xd2+Yd2)の平方根により求める。この場合、移動距離Sdは車速補正されたデータであり、移動距離XYdは絶対値座標によるデータである。
【0013】
ここで、GPSの受信状態、GPSアンテナの接続状態、車速補正などの受信環境が適切であり、現在位置ずれを生じていない場合、つまり車速補正が適切な場合は、車速情報等から演算した絶対位置座標から求められる移動距離と、メータ4から取得した走行距離(オドメータ値)から求められる移動距離とはほぼ一致するはずであるから、それらの誤差に基づいて受信環境が適切かを判断することができる。
【0014】
即ち、ステップ106において、車速センサからの走行距離(オドメータ値)から求められる移動距離Sdと、補正位置座標から演算した移動距離XYdとの誤差が、あらかじめ決められた値より小さい場合には、現在位置ずれが発生していないと判断してステップ107に進み、あらかじめ決められた値より大きい場合には、現在位置ずれが発生していると判断してステップ111に進む。具体的には、補正位置座標から演算した移動距離XYdと、車速センサからの走行距離(オドメータ値)から求められる移動距離Sdとの比を求めて、その値が、0.9から1.1の間にあるか否かで判定する。
【0015】
ステップ107では、前回の記録タイミングで現在位置ずれが発生していたと判断した場合にはF=1、現在位置ずれが発生していなかったと判断した場合にはF=0となる内部変数Fの値を調べて、F=1の場合にはステップ108へ進み、F=0の場合にはステップ110に進む。
【0016】
ここで、上述のように現在位置ずれが発生した場合には、その前後の記録タイミングでの相対位置座標も記録する。したがって、ステップ108では、前回の記録タイミングで現在位置ずれが発生していたと判断したため、今回の走行データと相対位置座標Xd、Ydをデータの発生タイミングがわかるように、時刻等のタイムスタンプと同時にそのままハードディスク装置6の故障診断用車両走行履歴データ8に記録し、ステップ109でFに0を書き込んでからステップ116へ進む。
【0017】
ステップ110では、前回も今回も現在位置ずれが発生していないと判断したため、走行位置履歴を記録せず、相対位置座標Xd、Ydはダミーの固定値、例えば8000(16進)として、車両の走行データとともに時刻等のタイムスタンプと同時にハードディスク装置6の故障診断用車両走行履歴データ8に記録してステップ116へ進む。
【0018】
一方、ステップ111では、前回の記録タイミングで現在位置ずれが発生していたと判断した場合にはF=1、現在位置ずれが発生していなかったと判断した場合にはF=0となる内部変数Fの値を調べて、F=1の場合にはステップ112へ進み、F=0の場合にはステップ113に進む。ステップ112では、現在位置ずれが発生していると判断したため、走行データと相対位置座標Xd、Ydをデータの発生タイミングがわかるように、時刻等のタイムスタンプと同時にそのままハードディスク装置6の故障診断用車両走行履歴データ8に記録してステップ116へ進む。ステップ113では、F=0、すなわち前回の記録タイミングで現在位置ずれが発生していないと判断したが、現在位置ずれが発生した場合には、その前後の記録タイミングでの相対位置座標も記録するため、前回の相対位置座標Xd1、Yd1によりハードディスク装置6の故障診断用車両走行履歴データ8に前回記録したXd、Ydを書き換える。そして、ステップ114において、走行データと相対位置座標Xd、Ydをデータの発生タイミングがわかるように、時刻等のタイムスタンプと同時にそのままハードディスク装置6の故障診断用車両走行履歴データ8に記録し、ステップ115でFに1を書込んでからステップ116へ進む。
【0019】
ステップ116では、次回の記録タイミングでの基準となるデータとして一時記憶エリアS1、X1、Y1のデータをS2、X2、Y2のデータでそれぞれ書き換えてステップ102に戻る。
以上のような動作により、現在位置ずれが発生した場合は、ハードディスク装置6の故障診断用車両走行履歴データ8に車両の相対位置座標に加えて車両の走行データが記憶される。
【0020】
図3に、ハードディスク装置6の故障診断用車両走行履歴データ8に記録したデータの一例を示す。ハードディスク装置6の故障診断用車両走行履歴データ8には、時刻とともに、相対位置座標、車速、エンジン回転数、燃料噴射量、点火角度などの車両の走行データが記録される。なお、図3に示す記録例では、時刻01009から01035では位置座標から演算した移動距離XYdと、車速センサからの走行距離(オドメータ値)から求められる移動距離Sdとの差が小さく、正常(通常)であると判断し、相対位置座標Xd、Ydは固定値8000(16進)を記録している。また、時刻01036及び時刻01038以降もXYdとSdとの差が小さく正常(通常)であるが、時刻01037でXYdとSdの差が大きく現在位置ずれを生じたため、時刻01037及び前後の時刻01036、時刻01038については、相対位置座標Xd、Ydをそのまま記録している。そして、時刻01039以降においては、相対位置座標Xd、Ydとして固定値8000(16進)を記録している。
つまり、ナビゲーション装置1は、上述のようにして現在位置ずれを生じたと判断したときは、その現在位置ずれの判断期間を含むように車両の走行経路を相対位置座標で記憶するのである。
【0021】
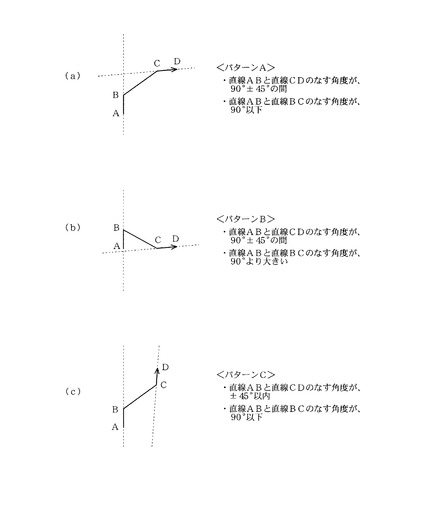
さて、現在位置ずれを生じる要因として車速補正の不適切が考えられる。
図4は、車速補正が不適切な場合の走行位置履歴(相対位置座標)の一例を二次元の座標上に表した例を示す。パターンAは、相対位置座標を示す直線BCで現在位置ずれが発生し、その前後の直線AB、直線CDも記録されている状態を示している。直線AB、直線CDでは現在位置ずれが発生していないと判断しているため、マップマッチングにより道路上をトレースしていると考えられる。従って、直線AB、直線CDを延長した線(図4中に破線で示した線)が地図の道路上と考えられる。このパターンAの場合は、地図上の交差点に到達する前に、実際には交差点で右折したと考えられる。このようなパターンAが発生する場合は、装着された車輪の直径等による車速センサの補正値が小さいために、実際の走行距離よりも短く表示されていると考えられる。
このようにパターンAと判断する条件としては、直線ABと直線CDのなす角度が90°±45°の間で、且つ直線ABと直線BCのなす角度が90°以下の場合である。
【0022】
パターンBでは、実際の交差点に到達していないのに、地図上では通過したと表示した場合であり、車速センサの補正値が大きいために、実際の走行距離よりも長く表示されていると考えられる。
このようにパターンBと判断する条件としては、直線ABと直線CDのなす角度が90°±45°の間で、且つ直線ABと直線BCのなす角度が90°より大きい場合である。
【0023】
また、パターンCでは、平行した道路を1本間違えた場合であり、これは一般的に道路形状等により判定が難しい場合が多い。
このようにパターンCと判断する条件としては、直線ABと直線CDのなす角度が±45°以内で、且つ直線ABと直線BCのなす角度が90°以下の場合である。
ユーザは、ナビゲーション装置1で上述のような現在位置ずれが発生したときは、何らかの異常が発生したと判断して修理作業者に修理を依頼する。
【0024】
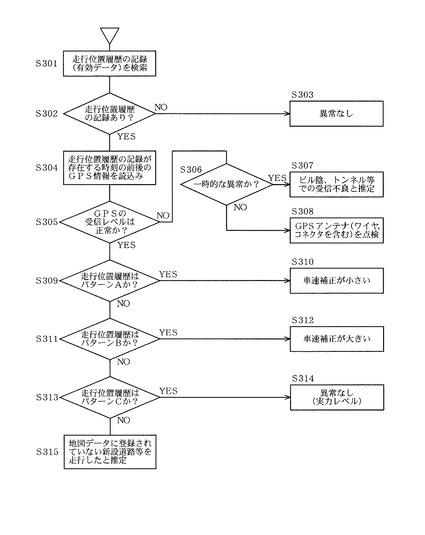
修理作業者は、ユーザからナビゲーション装置1の修理を依頼された場合は、ハードディスク装置6の故障診断用車両走行履歴データ8を解析する。
図5は、現在位置ずれに対する故障診断の解析手順例を示している。ステップ301において、修理作業者は、ハードディスク装置6の故障診断用車両走行履歴データ8に記録した有効な走行位置履歴の記録(ダミーで書き込んでいる8000(16進)以外の有効データ)があるかを検索する。ステップ302において、有効な走行位置履歴の記録がない場合はステップ303へ進み異常なしと判断する。有効な走行位置履歴の記録がある場合はステップ304へ進み、走行位置履歴の記録がある時刻の前後のGPS情報を読み込む。ステップ305に進み、走行位置履歴の記録がある時刻の前後においてGPSの受信レベルが正常かを判断する。正常でない場合には、ステップ306へ進み、その異常が継続的に続いているか一時的に発生しているかを判定する。一時的な異常の場合はステップ307へ進み、ビル陰やトンネル等での受信不良が発生したと推定する。継続的に続いている場合はステップ308へ進み、GPSアンテナ、ワイヤハーネスおよびコネクタの不良と推定して点検を実施する。
【0025】
ステップ305において、走行位置履歴の記録がある時刻の前後においてGPSの受信レベルが正常な場合には、ステップ309へ進み、走行位置履歴(相対位置座標)の二次元座標上での形状が、図4のパターンAに該当するかを判定する。パターンAに該当する場合は、ステップ310へ進み、車速補正値が小さいと判定する。パターンAに該当しない場合は、ステップ311へ進み、走行位置履歴(相対位置座標)の二次元座標上での形状が、図4のパターンBに該当するかを判定する。パターンBに該当する場合は、ステップ312へ進み、車速補正値が大きいと判定する。パターンBに該当しない場合は、ステップ313へ進み、走行位置履歴(相対位置座標)の二次元座標上での形状が、図4のパターンCに該当するかを判定する。パターンCに該当する場合は、ステップ314へ進み、異常なし(実力レベル)と判定する。
【0026】
一方、以上の何れの判定に当てはまらない場合は、ステップ315に進み、地図データに登録されていない新設道路等を走行した場合と推定できる。従って、運転者の協力を得て走行した場所を明確にする必要があるものの、上述したように相対位置座標のみを記録することにより、特殊な場合以外は、現在位置ずれの原因を推定できる。
【0027】
このような実施例によれば、GPS情報等から演算した絶対位置座標から求めた移動距離と、メータ4から取得した車両の走行距離から求めた移動距離との比較に基づいて現在位置ずれと判断したときは、車両の走行位置履歴として相対位置座標を記憶するようにしたので、走行位置履歴を絶対位置座標で記憶する従来例のものと違って、読み出せる記録は断片的な相対位置座標であり、第三者には走行位置履歴の絶対位置座標は分らず、個人のプライバシーを保護することができる。
しかも、このように優れた効果を奏する構成は、プログラムの変更のみで実施することができるので、ナビゲーション装置1を大幅に改造することなく低コストで実施することができる。
【0028】
(第2実施例)
次に、本発明の第2実施例について図6及び図7を参照して説明する。
上記の第1実施例では、現在位置ずれを生じていない通常状態では、走行データを記録しないようにしたが、絶対位置座標のみを第三者に分らないように暗号化して記録することもできる。この場合、車両の修理作業者は暗号化された情報以外は自由に見られるため、それらにより故障診断を実施することができる。
また、運転者の了解を得て暗号化された情報も使用すれば、故障時点での絶対位置座標を明らかにできるため、地図データに登録されていない新設道路を走行した場合等、さらに幅広い故障診断を行うことができる。
【0029】
図6は、システム構成を示すブロック図である。この図6のシステム構成図では、ハードディスク装置6の故障診断用車両走行履歴データ8の中に暗号化領域8aを追加した以外は図1と同じである。
【0030】
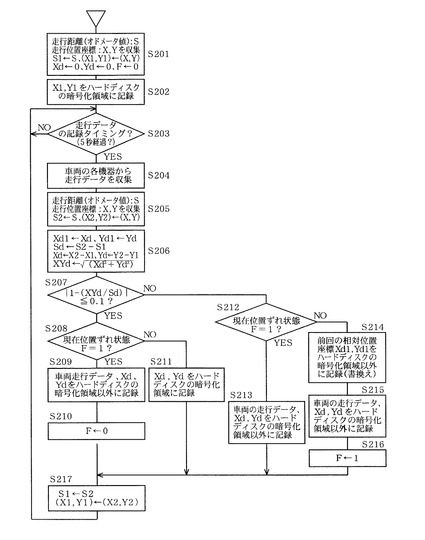
図7は、車両の車速等の走行データや走行位置履歴を記録する場合のフローチャートの一例であり、基本的には第1実施例の図2と同じである。ステップ201において、ナビゲーション装置1は、GPS情報等から演算した絶対位置座標(緯度:X、経度:Y)、およびメータ4から車両の走行距離(オドメータ値)Sを収集し、一時記憶エリアであるS1、X1、Y1にそれぞれ格納する。ステップ202では、絶対位置座標X1、Y1を、ハードディスク装置6の故障診断用車両走行履歴データ8の暗号化領域8aに時刻等のタイムスタンプと同時に記録する。このデータは暗号キーを持たない第三者は見ることができない。ステップ203以降はハードディスク装置6への書込みステップのみ図2と異なる。
【0031】
即ち、ステップ211では、現在位置ずれが発生していないと判定したため、ハードディスク装置6の故障診断用車両走行履歴データ8の暗号化領域8aに相対位置座標Xd、Ydを時刻等のタイムスタンプと同時に記録する。このデータは暗号キーを持たない第三者は見ることができない。そして、暗号化領域以外には相対位置座標Xd、Ydは固定値、例えば8000(16進)として、車両の走行データとともに時刻等のタイムスタンプと同時に記録する。ステップ209、ステップ213、ステップ214、ステップ215では、現在位置ずれが発生したと判断したため、または、その前後の相対位置座標の記録ステップであるため、ハードディスク装置6の故障診断用車両走行履歴データ8の暗号化領域8a以外に記録する。
【0032】
故障診断の解析手順については、暗号化された情報以外を使用する場合は、第1の実施例と同様である(図5参照)。
しかし、運転者の了解を得て暗号化された情報も使用する場合は、故障時点での絶対位置座標を明らかにできるため、さらに幅広い故障診断を行うことができる。例えば、現在位置ずれが、地図データに登録されていない新設道路であることが明確にできる。また、現在位置ずれ以外の故障診断においても、例えばエンジン制御コンピュータやエアコン装置との通信異常が特定の場所で発生する場合、その場所が電波送信施設や電力施設の近くであれば、それらの施設からの電気的なノイズの影響と推定できる。
【0033】
本発明は、上記各実施例に限定されることなく、次のように変形または拡張できる。
本実施例では、現在位置ずれの判定は、メータ4からの走行距離(オドメータ値)から求められる移動距離と、絶対位置座標から演算した移動距離との差が、あらかじめ決められた値より大きい場合としたが、位置座標から演算した移動距離(直線距離)ではなく、実際に地図画面上を移動した道のり距離とすれば、より正確な判定ができる。
車速補正の診断結果をユーザに報知することにより、ユーザが車速補正値を修正できるようにしてもよい。
【図面の簡単な説明】
【0034】
【図1】本発明の第1実施例におけるナビゲーション装置の電気的構成を示す機能ブロック図
【図2】ナビゲーション装置の動作を示すフローチャート
【図3】ハードディスク装置の記録データの一例を示す図
【図4】車速補正が不適切な場合の走行位置履歴の一例を示す図
【図5】現在位置ずれに対する故障診断の解析手順例を示すフローチャート
【図6】本発明の第2実施例を示す図1相当図
【図7】図2相当図
【符号の説明】
【0035】
図面中、1はナビゲーション装置、6はハードディスク装置(走行位置履歴記憶手段)、11は演算制御手段(現在位置取得手段、異常判断手段、走行距離取得手段)である。
【特許請求の範囲】
【請求項1】
車両の現在位置を所定期間毎に取得する現在位置取得手段と、
車両の走行位置履歴を記憶する走行位置履歴記憶手段と、
車両の異常を判断する異常判断手段とを備え、
前記走行位置履歴記憶手段は、通常時は走行位置履歴を記憶せず、前記異常判断手段が車両は異常であると判断した場合は、その判断期間中を含むように前記現在位置取得手段が取得した現在位置の変化を相対位置座標で順に記憶することを特徴とする車両用診断装置。
【請求項2】
車両側から走行距離を取得する走行距離取得手段を備え、
前記異常判断手段は、前記現在位置取得手段が取得した現在位置に基づく移動距離と前記走行距離取得手段が取得した走行距離に基づく移動距離との誤差が所定の許容範囲を上回った場合は現在位置ずれを生じたと判断することを特徴とする請求項1記載の車両用診断装置。
【請求項3】
前記走行位置履歴記憶手段は、通常時は前記走行位置履歴を記憶しないのに替えて暗号化して記憶することを特徴とする請求項1または2記載の車両用診断装置。
【請求項1】
車両の現在位置を所定期間毎に取得する現在位置取得手段と、
車両の走行位置履歴を記憶する走行位置履歴記憶手段と、
車両の異常を判断する異常判断手段とを備え、
前記走行位置履歴記憶手段は、通常時は走行位置履歴を記憶せず、前記異常判断手段が車両は異常であると判断した場合は、その判断期間中を含むように前記現在位置取得手段が取得した現在位置の変化を相対位置座標で順に記憶することを特徴とする車両用診断装置。
【請求項2】
車両側から走行距離を取得する走行距離取得手段を備え、
前記異常判断手段は、前記現在位置取得手段が取得した現在位置に基づく移動距離と前記走行距離取得手段が取得した走行距離に基づく移動距離との誤差が所定の許容範囲を上回った場合は現在位置ずれを生じたと判断することを特徴とする請求項1記載の車両用診断装置。
【請求項3】
前記走行位置履歴記憶手段は、通常時は前記走行位置履歴を記憶しないのに替えて暗号化して記憶することを特徴とする請求項1または2記載の車両用診断装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2008−44442(P2008−44442A)
【公開日】平成20年2月28日(2008.2.28)
【国際特許分類】
【出願番号】特願2006−219879(P2006−219879)
【出願日】平成18年8月11日(2006.8.11)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成20年2月28日(2008.2.28)
【国際特許分類】
【出願日】平成18年8月11日(2006.8.11)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]