
車両用走行制御装置および車両用走行制御方法
【課題】道路状況に応じた設定車速を設定する。
【解決手段】自車両の速度が設定車速と一致するように車両を制御する装置において、自車両が走行している道路の制限速度を取得し、取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、設定車速を第2の制限速度に変更する。ドライバが前記操作手段を操作することによって前記設定車速を変更してから所定時間以内は、前記制限速度取得手段によって取得した制限速度が前記第1の制限速度から前記第2の制限速度に変化した場合でも、前記設定車速を前記第2の制限速度に変更する処理を抑制する。制限速度が前記第1の制限速度から前記第2の制限速度に変化したことをドライバに報知する。
【解決手段】自車両の速度が設定車速と一致するように車両を制御する装置において、自車両が走行している道路の制限速度を取得し、取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、設定車速を第2の制限速度に変更する。ドライバが前記操作手段を操作することによって前記設定車速を変更してから所定時間以内は、前記制限速度取得手段によって取得した制限速度が前記第1の制限速度から前記第2の制限速度に変化した場合でも、前記設定車速を前記第2の制限速度に変更する処理を抑制する。制限速度が前記第1の制限速度から前記第2の制限速度に変化したことをドライバに報知する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車速が設定車速に一致するように制御する装置および方法に関する。
【背景技術】
【0002】
従来、先行車に追従して自動走行する装置において、追従走行時の最高車速を道路の制限速度、または、ドライバが設定した制限速度に制限する技術が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平07−85400号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、車速を設定車速に一致させるシステムに従来の技術を適用すると、最高車速を制限するだけなので、例えば、走行中に道路の制限速度が80km/hから100km/hに変わっても、車速は変化せず、道路状況に応じた走行ができないという問題が生じる。
【課題を解決するための手段】
【0005】
本発明による車両用走行制御装置および車両用走行制御方法は、自車両の速度が設定車速と一致するように車両を制御する装置であって、自車両が走行している道路の制限速度を取得し、取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、設定車速を第2の制限速度に変更することを特徴とする。
【発明の効果】
【0006】
本発明による車両用走行制御装置および車両用走行制御方法によれば、道路状況に応じた設定車速を設定することができるので、道路状況に応じた走行制御を実現することができる。
【図面の簡単な説明】
【0007】
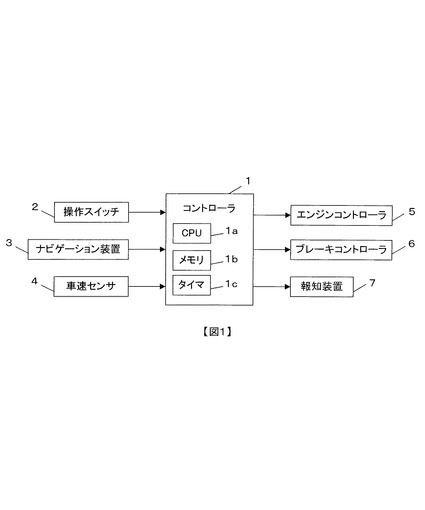
【図1】第1の実施の形態における車両用走行制御装置の構成を示すブロック図
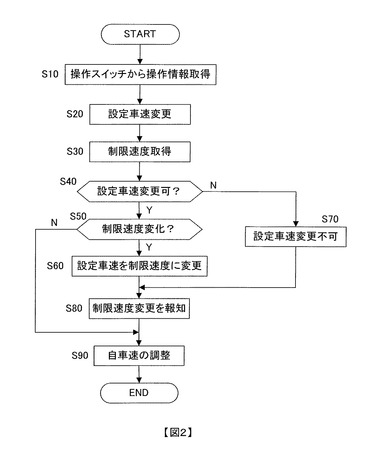
【図2】第1の実施の形態における車両用走行制御装置によって行われる処理内容を示すフローチャート
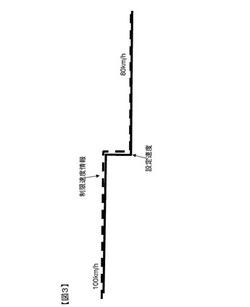
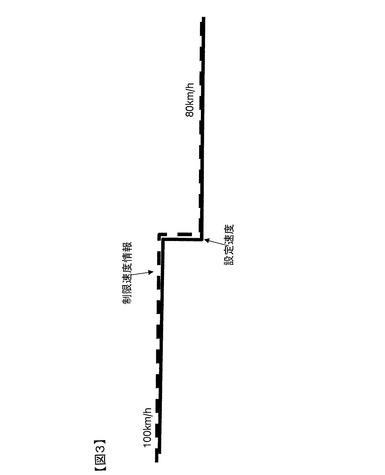
【図3】道路の制限速度が100km/hから80km/hに変化したことに伴い、設定車速も100km/hから80km/hに変化することを示す図
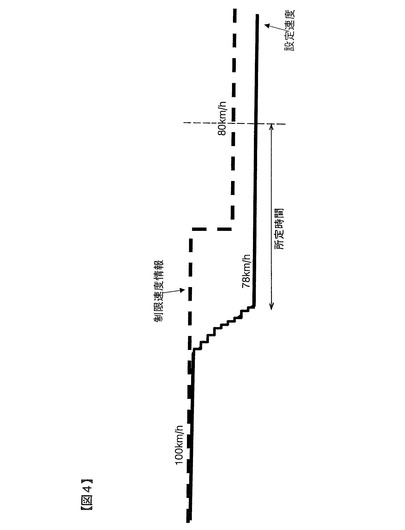
【図4】道路の制限速度が100km/hから80km/hに変化する手前で、ドライバが設定車速を78km/hに変更した場合の設定車速の変化を示す図
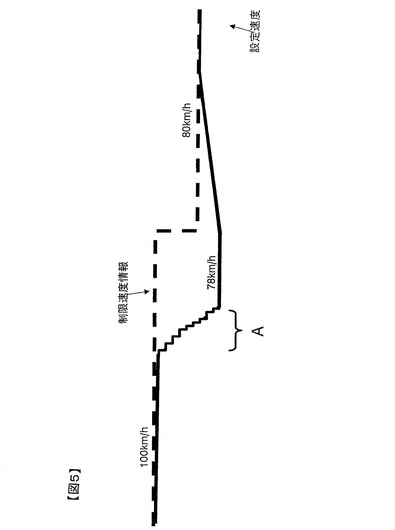
【図5】第2の実施の形態における車両用走行制御装置において、操作スイッチの操作が行われてから所定時間以内に、走行中の道路の制限速度が変化した場合の設定車速の変化を示す図
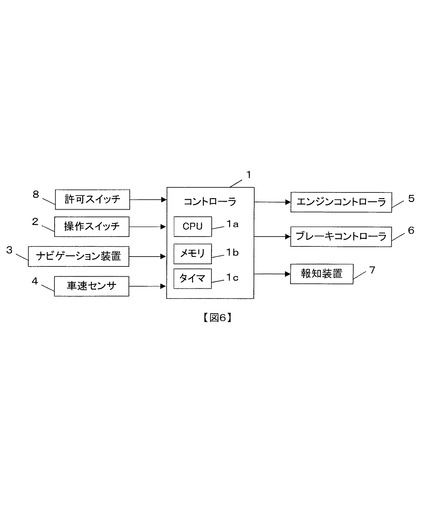
【図6】第3の実施の形態における車両用走行制御装置の構成を示すブロック図
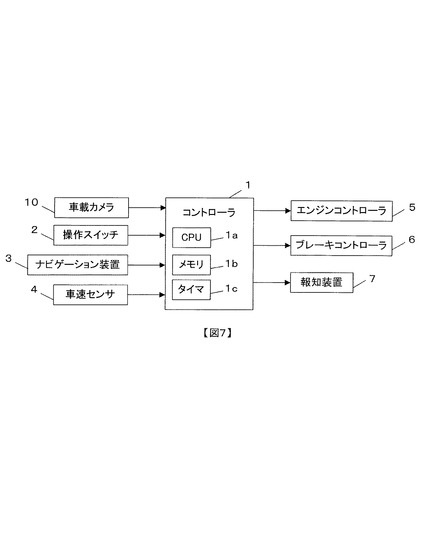
【図7】図1に示す第1の実施の形態における車両用走行制御装置の構成に加えて、車載カメラをさらに備えた場合の構成図
【図8】図1に示す第1の実施の形態における車両用走行制御装置の構成に加えて、路車間通信を行うための通信装置をさらに備えた場合の構成図
【発明を実施するための形態】
【0008】
−第1の実施の形態−
図1は、第1の実施の形態における車両用走行制御装置の構成を示すブロック図である。第1の実施の形態における車両用走行制御装置は、コントローラ1と、操作スイッチ2と、ナビゲーション装置3と、車速センサ4と、エンジンコントローラ5と、ブレーキコントローラ6と、報知装置7とを備える。この車両用走行制御装置は、ドライバがアクセルペダルから足を離しても、車両を設定車速で走行させる定速走行制御機能を備えている。
【0009】
操作スイッチ2は、車両が定速走行制御を行う際の設定車速を増加または減少させるためのスイッチであり、ドライバにより操作される。ナビゲーション装置3は、GPSユニット(不図示)や地図データベース(不図示)などを備え、GPSユニットによって検出される自車位置と、地図データベースに格納されている地図データとに基づいて、自車両が走行している道路を特定する。地図データベースに格納されている地図データには、道路の種別(高速道路、一般道路等)の情報とともに、道路の制限速度の情報が含まれている。ナビゲーション装置3は、自車両が走行していると判定した道路の制限速度を検出する。
【0010】
車速センサ4は、自車両の速度を検出する。エンジンコントローラ5は、後述するコントローラ1からの指示に基づいて、図示しないスロットルバルブの開閉を調整して、エンジントルクを制御することによって、車両の加減速度を制御する。ブレーキコントローラ6は、後述するコントローラ1からの指示に基づいて、各車輪に設けられている油圧ブレーキのブレーキ液圧を制御することによって、車両の減速度を制御する。
【0011】
報知装置7は、例えば、スピーカであり、後述するコントローラ1からの指示に基づいて、走行している道路の制限速度が変化したことをドライバに知らせる音声を出力する。
【0012】
コントローラ1は、CPU1a、メモリ1b、および、タイマ1cを備え、車速センサ4によって検出される自車両の速度を設定車速と一致させるためのエンジントルク指令値およびブレーキ液圧指令値を算出して、エンジンコントローラ5およびブレーキコントローラ6にそれぞれ出力する。設定車速は、後述するように、操作スイッチ2から入力される操作信号、および、ナビゲーション装置3から入力される走行道路の制限速度の情報に基づいて設定する。
【0013】
コントローラ1は、原則として、ドライバが操作スイッチ2を操作することによって設定する車速に基づいて設定車速を設定するが、自車両が走行している道路の制限速度が第1の制限速度から第2の制限速度へと変化すると、第2の制限速度を設定車速に設定する。例えば、設定車速95km/hで定速走行制御を行っている際に、走行している道路の制限速度が100km/hから80km/hに変わると、設定車速を80km/hに変更する。同様に、設定車速75km/hで定速走行制御を行っている際に、走行している道路の制限速度が80km/hから100km/hに変わると、設定車速を100km/hに変更する。これにより、走行している道路の状況に応じて、設定車速を自動的に変更することができる。
【0014】
ただし、第1の実施の形態における車両用走行制御装置では、ドライバが操作スイッチ2を操作することによって、設定車速を変更(増加または減少)させた場合には、操作スイッチ2の操作が行われてから所定時間(例えば、10秒)の間に道路の制限速度が変化しても、設定車速を変化後の制限速度に一致させる制御を禁止する。例えば、設定車速95km/hで定速走行制御を行っている際に、ドライバが設定車速を78km/hに変更してから10秒以内に、走行している道路の制限速度が100km/hから80km/hに変わっても、設定車速は78km/hのままで80km/hには変更しない。これにより、ドライバが意図的に設定車速を変更してからすぐに、設定車速が自動的に別の値に変更されてしまうのを防ぐことができる。
【0015】
図2は、第1の実施の形態における車両用走行制御装置によって行われる処理内容を示すフローチャートである。ドライバが定速走行制御を開始するためのスイッチ(不図示)を操作すると、コントローラ1のCPU1aは、ステップS10の処理を開始する。
【0016】
ステップS10では、操作スイッチ1から、ドライバの操作スイッチ1の操作状況を示す操作情報を取得して、ステップS20に進む。ステップS20では、ステップS10で取得した操作スイッチ1の操作情報に基づいて、設定車速を変更する。
(i)設定車速の増加時
操作スイッチ1が設定車速の増加方向に操作された場合には、次式(1)より、設定車速Vsetを算出する。ただし、Vset_oldは、前回の処理時における設定車速であり、ΔVupは、所定の設定速度増加量である。
Vset=Vset_old+ΔVup (1)
(ii)設定車速の減少時
操作スイッチ1が設定車速の減少方向に操作された場合には、次式(2)より、設定車速Vsetを算出する。ただし、Vset_oldは、前回の処理時における設定車速であり、ΔVdownは、所定の設定速度減少量である。
Vset=Vset_old−ΔVdown (2)
【0017】
ただし、ステップS10において、ドライバが操作スイッチ1を操作していないという操作情報を取得した場合には、ステップS20において、設定車速の変更は行わない。また、ドライバが操作スイッチ1を操作したという操作情報を取得すると、タイマ1cによる計時を開始する。
【0018】
ステップS20に続くステップS30では、ナビゲーション装置3から、自車両が走行している道路の制限速度Vlimitの情報を取得して、ステップS40に進む。ステップS40では、自車両が走行している道路の制限速度Vlimitの変化に応じた設定車速の変更が可能か否かを判定する。上述したように、ドライバが操作スイッチ1を操作(設定車速の変更操作)してから所定時間が経過するまで、すなわち、タイマ1cによる計時を開始してから所定時間が経過するまでの間は、制限速度Vlimitの変化に応じた設定車速の変更が不可能であると判定する。設定車速の変更が可能であると判断するとステップS50に進み、変更が不可能であると判定すると、ステップS70に進む。
【0019】
ステップS50では、ナビゲーション装置3から取得する制限速度Vlimitの情報に基づいて、自車両が走行している道路の制限速度が変化したか否かを判定する。走行中の道路の制限速度Vlimitが変化したと判定すると、ステップS60に進み、制限速度が変化していないと判定すると、ステップS90に進む。
【0020】
ステップS60では、設定車速を、変化後の制限速度Vlimitに一致させる。例えば、自車両が走行している道路の制限速度Vlimitが100km/hから80km/hに変わった場合には、設定車速を80km/hとする。図3は、自車両が走行している道路の制限速度Vlimitが100km/hから80km/hに変化したことに伴い、設定車速も100km/hから80km/hに変化することを示す図である。
【0021】
一方、ステップS70では、タイマ1cによる計測時間が所定時間を経過するまでの間は、走行中の道路の制限速度Vlimitが変化しても、設定車速を変更後の制限速度に変更する処理を行わない。
【0022】
図4は、自車両が走行している道路の制限速度Vlimitが100km/hから80km/hに変化する手前で、ドライバが操作スイッチ1を操作して、設定車速を78km/hに変更した場合の設定車速の変化を示す図である。上述したように、ドライバが操作スイッチ1を操作してから所定時間が経過するまでの間は、制限速度Vlimitの変化に応じた設定車速の変更を禁止するので、制限速度が100km/hから80km/hに変化しても、設定車速が78km/hから80km/hに変更されることはない。これにより、例えば、ドライバが前方道路の制限速度が80km/hであるという標識を見て、80km/hより少し低い78km/hに設定車速を変更した場合に、制限速度が80km/hの道路に進入してすぐに、設定車速が80km/hに変更されてしまうのを防ぐことができる。
【0023】
なお、図4に示す例において、ドライバが操作スイッチ1を操作して、設定車速を90km/hに変更した場合についても考察しておく。例えば、ナビゲーション装置3から取得した制限速度の情報では、制限速度が80km/hとなっていても、実際の道路の制限速度が80km/hから90km/hに変更されている場合もある。すなわち、ナビゲーション装置3に格納されている古いデータでは、ドライバの変更した車速(90km/h)が制限速度を超えているが、実際の制限速度は超えていないため、特に問題はない。また、実際の制限速度が80km/hの場合でも、ドライバは制限速度の標識等を確認することにより、設定車速を80km/h以下に変更することが可能である。
【0024】
ステップS60またはステップS70の処理が行われると、ステップS80に進む。ステップS80では、自車両が走行している道路の制限速度が変化した場合に、制限速度が変化したことを報知装置7によって、ドライバに報知する。例えば、「制限速度が100km/hから80km/hに変更になりました」というような音声をスピーカである報知装置7から出力する。ステップS80の処理を行うと、ステップS90に進む。
【0025】
ステップS90では、車速センサ4によって検出される車速が設定車速と一致するような指令値を算出する。例えば、設定車速に対して、自車速が低い場合には、車両を加速させるためのエンジントルク指令値を算出して、エンジンコントローラ5に出力する。また、設定車速に対して、自車速が高い場合には、車両を減速させるためのエンジントルク指令値およびブレーキ液圧指令値をそれぞれ算出して、エンジントルク指令値をエンジンコントローラ5に出力するとともに、ブレーキ液圧指令値をブレーキコントローラ6に出力する。これにより、自車両の速度が設定車速に保たれる。
【0026】
第1の実施の形態における車両用走行制御装置によれば、自車両の速度が設定車速と一致するように車両を制御する装置において、自車両が走行している道路の制限速度を取得し、取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、設定車速を第2の制限速度に変更する。これにより、道路状況に応じた設定車速を設定することができるので、道路状況に応じた定速走行制御を実現することができる。例えば、道路の制限速度が100km/hから80km/hに変わる場合であって、自車両が100km/hの定速走行を行っている場合に、設定車速が100km/hから80km/hに自動的に変わるので、ドライバが設定車速を80km/hに変更する操作を行う必要がなくなる。
【0027】
同様に、道路の制限速度が80km/hから100km/hに変わる場合も、設定車速が100km/hに自動的に変わるので、ドライバが設定車速を100km/hに変更する操作を行う必要がない。一方、最高車速を制限するだけの従来の装置では、道路の制限速度が80km/hから100km/hに変わっても、設定車速は80km/hで変わらないので、ドライバが設定車速を100km/hに変更する操作を行わなければならない。また、制限速度が100km/hの道路で設定車速を95km/hに設定したい場合、第1の実施の形態における車両用走行制御装置によれば、自動的に変更された100km/hの設定車速から5km/hだけ減少させる操作を行えばよい。一方、最高車速を制限するだけの従来の装置では、設定車速を80km/hから95km/hまで、15km/h増加させる操作を行う必要がある。
【0028】
また、第1の実施の形態における車両用走行制御装置によれば、ドライバが操作スイッチ1を操作することによって設定車速を変更してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止するようにした。これにより、例えば、自車両が走行している道路の制限速度が100km/hから80km/hに変更になる直前に、ドライバが設定車速を100km/hから78km/hに変更した場合に、制限速度が80km/hの道路に進入してすぐに、設定車速が78km/hから80km/hに変更されてしまうのを防ぐことができる。すなわち、設定車速の変更に際し、ドライバの意図を優先させることができる。
【0029】
さらに、第1の実施の形態における車両用走行制御装置によれば、自車両が走行している道路の制限速度が変化した場合に、制限速度が変化したことをドライバに報知するので、ドライバは制限速度が変化したことを容易に把握することができる。
【0030】
−第2の実施の形態−
第1の実施の形態における車両用走行制御装置では、ドライバが操作スイッチ1を操作することによって設定車速を変更してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止するようにした。第2の実施の形態における車両用走行制御装置では、ドライバが操作スイッチ1を操作してから所定時間以内に、走行中の道路の制限速度が変化した場合には、設定車速を変更後の制限速度に変更する際の所定時間あたりの変化量を小さくする。
【0031】
図5は、第2の実施の形態における車両用走行制御装置において、ドライバが操作スイッチ1を操作してから所定時間以内に、走行中の道路の制限速度が変化した場合の設定車速の変化を示す図である。設定車速を変更後の制限速度に変更する際の所定時間あたりの変化量を小さくしない場合には、図3に示すように、制限速度が第1の制限速度から第2の制限速度に変化すると、設定車速をすぐに第2の制限速度に変更する。しかし、第2の実施の形態では、設定車速を第2の制限速度に変更する際の所定時間あたりの変化量を小さくすることにより、設定車速が第2の制限速度に一致するまでの時間を長くする。これにより、制限速度が第1の制限速度から第2の制限速度に変化する直前に、ドライバが設定車速を変更した場合に、車両が第2の制限速度の道路に進入してすぐに、設定車速が第2の制限速度に変更されてしまうのを防ぐことができる。
【0032】
−第3の実施の形態−
図6は、第3の実施の形態における車両用走行制御装置の構成を示すブロック図である。第3の実施の形態における車両用走行制御装置は、図1に示す第1の実施の形態における車両用走行制御装置の構成に加えて、許可スイッチ8をさらに備えている。
【0033】
許可スイッチ8は、ドライバが操作スイッチ1を操作することによって設定車速を変更してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止する処理をドライバが許可するか否かを指示するためのスイッチである。すなわち、ドライバは、許可スイッチ8を操作することによって、操作スイッチ1を操作してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止する処理を許可するか、または、不許可とするかを予め選択しておく。
【0034】
コントローラ1は、許可スイッチ8からの指示が許可となっている場合にのみ、操作スイッチ1を操作してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止する処理を行う。逆に、許可スイッチ8からの指示が不許可となっている場合には、操作スイッチ1を操作してから所定時間以内に、道路の制限速度が第1の制限速度から第2の制限速度に変化すると、設定車速を第2の制限速度に変更する処理を行う。
【0035】
第3の実施の形態における車両用走行制御装置によれば、ドライバからの許可があった場合にのみ、操作スイッチ1を操作してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止する処理を行うので、ドライバの意図を優先した処理を行うことができる。
【0036】
本発明は、上述した各実施の形態に限定されることはない。例えば、上述した第1〜第3の実施の形態では、自車両が走行している道路の制限速度をナビゲーション装置3が検出したが、別の方法により検出してもよい。図7は、図1に示す第1の実施の形態における車両用走行制御装置の構成に加えて、車載カメラ10をさらに備えた場合の構成図である。車載カメラ10は、車両前方を撮像する。コントローラ1は、車載カメラ10により撮像された映像に対して、画像処理を施すことにより、制限速度が記された標識を検出し、検出した標識に描かれている制限速度を認識する。
【0037】
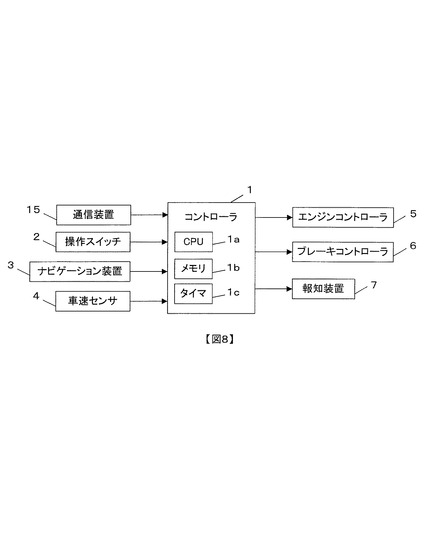
図8は、図1に示す第1の実施の形態における車両用走行制御装置の構成に加えて、路車間通信を行うための通信装置15をさらに備えた場合の構成図である。通信装置15は、VICS等の情報通信システムを利用するための通信装置であり、路側に設置されている路側機と通信を行うことにより、道路の制限速度の情報を取得する。
【0038】
上述した第1の実施の形態では、ドライバが操作スイッチ1を操作することによって設定車速を変更してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止するようにした。しかし、ドライバが操作スイッチ1を操作することによって設定車速を変更してから、車両が所定距離を走行する間は、制限速度の変化に基づく設定車速の変更を禁止するようにしてもよい。走行距離の検出は、車両が一般的に備えているセンサを利用すればよい。所定距離は、例えば、200m等のように固定した値を用いてもよいし、その時の車速で所定時間(例えば、10秒)走行する場合の距離としてもよい。第2および第3の実施の形態における車両用走行制御装置でも同様に、所定時間の代わりに、所定距離に基づいて制御することができる。
【0039】
第3の実施の形態における車両用走行制御装置では、ドライバからの許可があった場合にのみ、操作スイッチ1を操作してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止する処理を行った。第2の実施の形態でも同様に、ドライバからの許可があった場合にのみ、ドライバが操作スイッチ1を操作してから所定時間以内に、走行中の道路の制限速度が変化すると、設定車速を変更後の制限速度に変更する際の所定時間あたりの変化量を小さくする処理を行ってもよい。
【0040】
走行している道路の制限速度が変化したことをドライバに報知する報知装置7の一例として、音声で報知するスピーカを挙げたが、スピーカに限定されることはない。例えば、制限速度が変化したことを表示するディスプレイであってもよいし、点灯することにより、制限速度が変化したことを知らせるためのインジケータであってもよい。
【0041】
特許請求の範囲の構成要素と第1〜第3の実施の形態の構成要素との対応関係は次の通りである。すなわち、車速センサ4が車速検出手段を、エンジンコントローラ5およびブレーキコントローラ6が制御手段を、操作スイッチ2が操作手段を、ナビゲーション装置3が制限速度取得手段を、コントローラ1が設定車速変更手段を、報知装置7が報知手段をそれぞれ構成する。なお、以上の説明はあくまで一例であり、発明を解釈する上で、上記の実施形態の構成要素と本発明の構成要素との対応関係に何ら限定されるものではない。
【符号の説明】
【0042】
1…コントローラ
2…操作スイッチ
3…ナビゲーション装置
4…車速センサ
5…エンジンコントローラ
6…ブレーキコントローラ
7…報知装置
8…許可スイッチ
10…車載カメラ
【技術分野】
【0001】
本発明は、車速が設定車速に一致するように制御する装置および方法に関する。
【背景技術】
【0002】
従来、先行車に追従して自動走行する装置において、追従走行時の最高車速を道路の制限速度、または、ドライバが設定した制限速度に制限する技術が知られている(特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開平07−85400号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、車速を設定車速に一致させるシステムに従来の技術を適用すると、最高車速を制限するだけなので、例えば、走行中に道路の制限速度が80km/hから100km/hに変わっても、車速は変化せず、道路状況に応じた走行ができないという問題が生じる。
【課題を解決するための手段】
【0005】
本発明による車両用走行制御装置および車両用走行制御方法は、自車両の速度が設定車速と一致するように車両を制御する装置であって、自車両が走行している道路の制限速度を取得し、取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、設定車速を第2の制限速度に変更することを特徴とする。
【発明の効果】
【0006】
本発明による車両用走行制御装置および車両用走行制御方法によれば、道路状況に応じた設定車速を設定することができるので、道路状況に応じた走行制御を実現することができる。
【図面の簡単な説明】
【0007】
【図1】第1の実施の形態における車両用走行制御装置の構成を示すブロック図
【図2】第1の実施の形態における車両用走行制御装置によって行われる処理内容を示すフローチャート
【図3】道路の制限速度が100km/hから80km/hに変化したことに伴い、設定車速も100km/hから80km/hに変化することを示す図
【図4】道路の制限速度が100km/hから80km/hに変化する手前で、ドライバが設定車速を78km/hに変更した場合の設定車速の変化を示す図
【図5】第2の実施の形態における車両用走行制御装置において、操作スイッチの操作が行われてから所定時間以内に、走行中の道路の制限速度が変化した場合の設定車速の変化を示す図
【図6】第3の実施の形態における車両用走行制御装置の構成を示すブロック図
【図7】図1に示す第1の実施の形態における車両用走行制御装置の構成に加えて、車載カメラをさらに備えた場合の構成図
【図8】図1に示す第1の実施の形態における車両用走行制御装置の構成に加えて、路車間通信を行うための通信装置をさらに備えた場合の構成図
【発明を実施するための形態】
【0008】
−第1の実施の形態−
図1は、第1の実施の形態における車両用走行制御装置の構成を示すブロック図である。第1の実施の形態における車両用走行制御装置は、コントローラ1と、操作スイッチ2と、ナビゲーション装置3と、車速センサ4と、エンジンコントローラ5と、ブレーキコントローラ6と、報知装置7とを備える。この車両用走行制御装置は、ドライバがアクセルペダルから足を離しても、車両を設定車速で走行させる定速走行制御機能を備えている。
【0009】
操作スイッチ2は、車両が定速走行制御を行う際の設定車速を増加または減少させるためのスイッチであり、ドライバにより操作される。ナビゲーション装置3は、GPSユニット(不図示)や地図データベース(不図示)などを備え、GPSユニットによって検出される自車位置と、地図データベースに格納されている地図データとに基づいて、自車両が走行している道路を特定する。地図データベースに格納されている地図データには、道路の種別(高速道路、一般道路等)の情報とともに、道路の制限速度の情報が含まれている。ナビゲーション装置3は、自車両が走行していると判定した道路の制限速度を検出する。
【0010】
車速センサ4は、自車両の速度を検出する。エンジンコントローラ5は、後述するコントローラ1からの指示に基づいて、図示しないスロットルバルブの開閉を調整して、エンジントルクを制御することによって、車両の加減速度を制御する。ブレーキコントローラ6は、後述するコントローラ1からの指示に基づいて、各車輪に設けられている油圧ブレーキのブレーキ液圧を制御することによって、車両の減速度を制御する。
【0011】
報知装置7は、例えば、スピーカであり、後述するコントローラ1からの指示に基づいて、走行している道路の制限速度が変化したことをドライバに知らせる音声を出力する。
【0012】
コントローラ1は、CPU1a、メモリ1b、および、タイマ1cを備え、車速センサ4によって検出される自車両の速度を設定車速と一致させるためのエンジントルク指令値およびブレーキ液圧指令値を算出して、エンジンコントローラ5およびブレーキコントローラ6にそれぞれ出力する。設定車速は、後述するように、操作スイッチ2から入力される操作信号、および、ナビゲーション装置3から入力される走行道路の制限速度の情報に基づいて設定する。
【0013】
コントローラ1は、原則として、ドライバが操作スイッチ2を操作することによって設定する車速に基づいて設定車速を設定するが、自車両が走行している道路の制限速度が第1の制限速度から第2の制限速度へと変化すると、第2の制限速度を設定車速に設定する。例えば、設定車速95km/hで定速走行制御を行っている際に、走行している道路の制限速度が100km/hから80km/hに変わると、設定車速を80km/hに変更する。同様に、設定車速75km/hで定速走行制御を行っている際に、走行している道路の制限速度が80km/hから100km/hに変わると、設定車速を100km/hに変更する。これにより、走行している道路の状況に応じて、設定車速を自動的に変更することができる。
【0014】
ただし、第1の実施の形態における車両用走行制御装置では、ドライバが操作スイッチ2を操作することによって、設定車速を変更(増加または減少)させた場合には、操作スイッチ2の操作が行われてから所定時間(例えば、10秒)の間に道路の制限速度が変化しても、設定車速を変化後の制限速度に一致させる制御を禁止する。例えば、設定車速95km/hで定速走行制御を行っている際に、ドライバが設定車速を78km/hに変更してから10秒以内に、走行している道路の制限速度が100km/hから80km/hに変わっても、設定車速は78km/hのままで80km/hには変更しない。これにより、ドライバが意図的に設定車速を変更してからすぐに、設定車速が自動的に別の値に変更されてしまうのを防ぐことができる。
【0015】
図2は、第1の実施の形態における車両用走行制御装置によって行われる処理内容を示すフローチャートである。ドライバが定速走行制御を開始するためのスイッチ(不図示)を操作すると、コントローラ1のCPU1aは、ステップS10の処理を開始する。
【0016】
ステップS10では、操作スイッチ1から、ドライバの操作スイッチ1の操作状況を示す操作情報を取得して、ステップS20に進む。ステップS20では、ステップS10で取得した操作スイッチ1の操作情報に基づいて、設定車速を変更する。
(i)設定車速の増加時
操作スイッチ1が設定車速の増加方向に操作された場合には、次式(1)より、設定車速Vsetを算出する。ただし、Vset_oldは、前回の処理時における設定車速であり、ΔVupは、所定の設定速度増加量である。
Vset=Vset_old+ΔVup (1)
(ii)設定車速の減少時
操作スイッチ1が設定車速の減少方向に操作された場合には、次式(2)より、設定車速Vsetを算出する。ただし、Vset_oldは、前回の処理時における設定車速であり、ΔVdownは、所定の設定速度減少量である。
Vset=Vset_old−ΔVdown (2)
【0017】
ただし、ステップS10において、ドライバが操作スイッチ1を操作していないという操作情報を取得した場合には、ステップS20において、設定車速の変更は行わない。また、ドライバが操作スイッチ1を操作したという操作情報を取得すると、タイマ1cによる計時を開始する。
【0018】
ステップS20に続くステップS30では、ナビゲーション装置3から、自車両が走行している道路の制限速度Vlimitの情報を取得して、ステップS40に進む。ステップS40では、自車両が走行している道路の制限速度Vlimitの変化に応じた設定車速の変更が可能か否かを判定する。上述したように、ドライバが操作スイッチ1を操作(設定車速の変更操作)してから所定時間が経過するまで、すなわち、タイマ1cによる計時を開始してから所定時間が経過するまでの間は、制限速度Vlimitの変化に応じた設定車速の変更が不可能であると判定する。設定車速の変更が可能であると判断するとステップS50に進み、変更が不可能であると判定すると、ステップS70に進む。
【0019】
ステップS50では、ナビゲーション装置3から取得する制限速度Vlimitの情報に基づいて、自車両が走行している道路の制限速度が変化したか否かを判定する。走行中の道路の制限速度Vlimitが変化したと判定すると、ステップS60に進み、制限速度が変化していないと判定すると、ステップS90に進む。
【0020】
ステップS60では、設定車速を、変化後の制限速度Vlimitに一致させる。例えば、自車両が走行している道路の制限速度Vlimitが100km/hから80km/hに変わった場合には、設定車速を80km/hとする。図3は、自車両が走行している道路の制限速度Vlimitが100km/hから80km/hに変化したことに伴い、設定車速も100km/hから80km/hに変化することを示す図である。
【0021】
一方、ステップS70では、タイマ1cによる計測時間が所定時間を経過するまでの間は、走行中の道路の制限速度Vlimitが変化しても、設定車速を変更後の制限速度に変更する処理を行わない。
【0022】
図4は、自車両が走行している道路の制限速度Vlimitが100km/hから80km/hに変化する手前で、ドライバが操作スイッチ1を操作して、設定車速を78km/hに変更した場合の設定車速の変化を示す図である。上述したように、ドライバが操作スイッチ1を操作してから所定時間が経過するまでの間は、制限速度Vlimitの変化に応じた設定車速の変更を禁止するので、制限速度が100km/hから80km/hに変化しても、設定車速が78km/hから80km/hに変更されることはない。これにより、例えば、ドライバが前方道路の制限速度が80km/hであるという標識を見て、80km/hより少し低い78km/hに設定車速を変更した場合に、制限速度が80km/hの道路に進入してすぐに、設定車速が80km/hに変更されてしまうのを防ぐことができる。
【0023】
なお、図4に示す例において、ドライバが操作スイッチ1を操作して、設定車速を90km/hに変更した場合についても考察しておく。例えば、ナビゲーション装置3から取得した制限速度の情報では、制限速度が80km/hとなっていても、実際の道路の制限速度が80km/hから90km/hに変更されている場合もある。すなわち、ナビゲーション装置3に格納されている古いデータでは、ドライバの変更した車速(90km/h)が制限速度を超えているが、実際の制限速度は超えていないため、特に問題はない。また、実際の制限速度が80km/hの場合でも、ドライバは制限速度の標識等を確認することにより、設定車速を80km/h以下に変更することが可能である。
【0024】
ステップS60またはステップS70の処理が行われると、ステップS80に進む。ステップS80では、自車両が走行している道路の制限速度が変化した場合に、制限速度が変化したことを報知装置7によって、ドライバに報知する。例えば、「制限速度が100km/hから80km/hに変更になりました」というような音声をスピーカである報知装置7から出力する。ステップS80の処理を行うと、ステップS90に進む。
【0025】
ステップS90では、車速センサ4によって検出される車速が設定車速と一致するような指令値を算出する。例えば、設定車速に対して、自車速が低い場合には、車両を加速させるためのエンジントルク指令値を算出して、エンジンコントローラ5に出力する。また、設定車速に対して、自車速が高い場合には、車両を減速させるためのエンジントルク指令値およびブレーキ液圧指令値をそれぞれ算出して、エンジントルク指令値をエンジンコントローラ5に出力するとともに、ブレーキ液圧指令値をブレーキコントローラ6に出力する。これにより、自車両の速度が設定車速に保たれる。
【0026】
第1の実施の形態における車両用走行制御装置によれば、自車両の速度が設定車速と一致するように車両を制御する装置において、自車両が走行している道路の制限速度を取得し、取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、設定車速を第2の制限速度に変更する。これにより、道路状況に応じた設定車速を設定することができるので、道路状況に応じた定速走行制御を実現することができる。例えば、道路の制限速度が100km/hから80km/hに変わる場合であって、自車両が100km/hの定速走行を行っている場合に、設定車速が100km/hから80km/hに自動的に変わるので、ドライバが設定車速を80km/hに変更する操作を行う必要がなくなる。
【0027】
同様に、道路の制限速度が80km/hから100km/hに変わる場合も、設定車速が100km/hに自動的に変わるので、ドライバが設定車速を100km/hに変更する操作を行う必要がない。一方、最高車速を制限するだけの従来の装置では、道路の制限速度が80km/hから100km/hに変わっても、設定車速は80km/hで変わらないので、ドライバが設定車速を100km/hに変更する操作を行わなければならない。また、制限速度が100km/hの道路で設定車速を95km/hに設定したい場合、第1の実施の形態における車両用走行制御装置によれば、自動的に変更された100km/hの設定車速から5km/hだけ減少させる操作を行えばよい。一方、最高車速を制限するだけの従来の装置では、設定車速を80km/hから95km/hまで、15km/h増加させる操作を行う必要がある。
【0028】
また、第1の実施の形態における車両用走行制御装置によれば、ドライバが操作スイッチ1を操作することによって設定車速を変更してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止するようにした。これにより、例えば、自車両が走行している道路の制限速度が100km/hから80km/hに変更になる直前に、ドライバが設定車速を100km/hから78km/hに変更した場合に、制限速度が80km/hの道路に進入してすぐに、設定車速が78km/hから80km/hに変更されてしまうのを防ぐことができる。すなわち、設定車速の変更に際し、ドライバの意図を優先させることができる。
【0029】
さらに、第1の実施の形態における車両用走行制御装置によれば、自車両が走行している道路の制限速度が変化した場合に、制限速度が変化したことをドライバに報知するので、ドライバは制限速度が変化したことを容易に把握することができる。
【0030】
−第2の実施の形態−
第1の実施の形態における車両用走行制御装置では、ドライバが操作スイッチ1を操作することによって設定車速を変更してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止するようにした。第2の実施の形態における車両用走行制御装置では、ドライバが操作スイッチ1を操作してから所定時間以内に、走行中の道路の制限速度が変化した場合には、設定車速を変更後の制限速度に変更する際の所定時間あたりの変化量を小さくする。
【0031】
図5は、第2の実施の形態における車両用走行制御装置において、ドライバが操作スイッチ1を操作してから所定時間以内に、走行中の道路の制限速度が変化した場合の設定車速の変化を示す図である。設定車速を変更後の制限速度に変更する際の所定時間あたりの変化量を小さくしない場合には、図3に示すように、制限速度が第1の制限速度から第2の制限速度に変化すると、設定車速をすぐに第2の制限速度に変更する。しかし、第2の実施の形態では、設定車速を第2の制限速度に変更する際の所定時間あたりの変化量を小さくすることにより、設定車速が第2の制限速度に一致するまでの時間を長くする。これにより、制限速度が第1の制限速度から第2の制限速度に変化する直前に、ドライバが設定車速を変更した場合に、車両が第2の制限速度の道路に進入してすぐに、設定車速が第2の制限速度に変更されてしまうのを防ぐことができる。
【0032】
−第3の実施の形態−
図6は、第3の実施の形態における車両用走行制御装置の構成を示すブロック図である。第3の実施の形態における車両用走行制御装置は、図1に示す第1の実施の形態における車両用走行制御装置の構成に加えて、許可スイッチ8をさらに備えている。
【0033】
許可スイッチ8は、ドライバが操作スイッチ1を操作することによって設定車速を変更してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止する処理をドライバが許可するか否かを指示するためのスイッチである。すなわち、ドライバは、許可スイッチ8を操作することによって、操作スイッチ1を操作してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止する処理を許可するか、または、不許可とするかを予め選択しておく。
【0034】
コントローラ1は、許可スイッチ8からの指示が許可となっている場合にのみ、操作スイッチ1を操作してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止する処理を行う。逆に、許可スイッチ8からの指示が不許可となっている場合には、操作スイッチ1を操作してから所定時間以内に、道路の制限速度が第1の制限速度から第2の制限速度に変化すると、設定車速を第2の制限速度に変更する処理を行う。
【0035】
第3の実施の形態における車両用走行制御装置によれば、ドライバからの許可があった場合にのみ、操作スイッチ1を操作してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止する処理を行うので、ドライバの意図を優先した処理を行うことができる。
【0036】
本発明は、上述した各実施の形態に限定されることはない。例えば、上述した第1〜第3の実施の形態では、自車両が走行している道路の制限速度をナビゲーション装置3が検出したが、別の方法により検出してもよい。図7は、図1に示す第1の実施の形態における車両用走行制御装置の構成に加えて、車載カメラ10をさらに備えた場合の構成図である。車載カメラ10は、車両前方を撮像する。コントローラ1は、車載カメラ10により撮像された映像に対して、画像処理を施すことにより、制限速度が記された標識を検出し、検出した標識に描かれている制限速度を認識する。
【0037】
図8は、図1に示す第1の実施の形態における車両用走行制御装置の構成に加えて、路車間通信を行うための通信装置15をさらに備えた場合の構成図である。通信装置15は、VICS等の情報通信システムを利用するための通信装置であり、路側に設置されている路側機と通信を行うことにより、道路の制限速度の情報を取得する。
【0038】
上述した第1の実施の形態では、ドライバが操作スイッチ1を操作することによって設定車速を変更してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止するようにした。しかし、ドライバが操作スイッチ1を操作することによって設定車速を変更してから、車両が所定距離を走行する間は、制限速度の変化に基づく設定車速の変更を禁止するようにしてもよい。走行距離の検出は、車両が一般的に備えているセンサを利用すればよい。所定距離は、例えば、200m等のように固定した値を用いてもよいし、その時の車速で所定時間(例えば、10秒)走行する場合の距離としてもよい。第2および第3の実施の形態における車両用走行制御装置でも同様に、所定時間の代わりに、所定距離に基づいて制御することができる。
【0039】
第3の実施の形態における車両用走行制御装置では、ドライバからの許可があった場合にのみ、操作スイッチ1を操作してから所定時間以内は、制限速度の変化に基づく設定車速の変更を禁止する処理を行った。第2の実施の形態でも同様に、ドライバからの許可があった場合にのみ、ドライバが操作スイッチ1を操作してから所定時間以内に、走行中の道路の制限速度が変化すると、設定車速を変更後の制限速度に変更する際の所定時間あたりの変化量を小さくする処理を行ってもよい。
【0040】
走行している道路の制限速度が変化したことをドライバに報知する報知装置7の一例として、音声で報知するスピーカを挙げたが、スピーカに限定されることはない。例えば、制限速度が変化したことを表示するディスプレイであってもよいし、点灯することにより、制限速度が変化したことを知らせるためのインジケータであってもよい。
【0041】
特許請求の範囲の構成要素と第1〜第3の実施の形態の構成要素との対応関係は次の通りである。すなわち、車速センサ4が車速検出手段を、エンジンコントローラ5およびブレーキコントローラ6が制御手段を、操作スイッチ2が操作手段を、ナビゲーション装置3が制限速度取得手段を、コントローラ1が設定車速変更手段を、報知装置7が報知手段をそれぞれ構成する。なお、以上の説明はあくまで一例であり、発明を解釈する上で、上記の実施形態の構成要素と本発明の構成要素との対応関係に何ら限定されるものではない。
【符号の説明】
【0042】
1…コントローラ
2…操作スイッチ
3…ナビゲーション装置
4…車速センサ
5…エンジンコントローラ
6…ブレーキコントローラ
7…報知装置
8…許可スイッチ
10…車載カメラ
【特許請求の範囲】
【請求項1】
自車両の速度を検出する車速検出手段と、
ドライバの操作によって、車両が定速走行する際の車速(以下、設定車速)を設定することができる操作手段と、
前記車速検出手段によって検出される車速が前記設定車速と一致するように車両を制御する制御手段と、
自車両が走行している道路の制限速度を取得する制限速度取得手段と、
前記制限速度取得手段によって取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、前記設定車速を前記第2の制限速度に変更する設定車速変更手段とを備えることを特徴とする車両用走行制御装置。
【請求項2】
請求項1に記載の車両用走行制御装置において、
前記設定車速変更手段は、ドライバが前記操作手段を操作することによって前記設定車速を変更してから所定時間以内は、前記制限速度取得手段によって取得した制限速度が前記第1の制限速度から前記第2の制限速度に変化した場合でも、前記設定車速を前記第2の制限速度に変更する処理を抑制することを特徴とする車両用走行制御装置。
【請求項3】
請求項1に記載の車両用走行制御装置において、
前記設定車速変更手段は、ドライバが前記操作手段を操作することによって前記設定車速を変更してから、車両が所定距離を走行する間は、前記制限速度取得手段によって取得した制限速度が前記第1の制限速度から前記第2の制限速度に変化した場合でも、前記設定車速を前記第2の制限速度に変更する処理を抑制することを特徴とする車両用走行制御装置。
【請求項4】
請求項2または請求項3に記載の車両用走行制御装置において、
前記設定車速変更手段は、前記設定車速を前記第2の制限速度に変更する処理を禁止することによって、前記設定車速を前記第2の制限速度に変更する処理を抑制することを特徴とする車両用走行制御装置。
【請求項5】
請求項2または請求項3に記載の車両用走行制御装置において、
前記設定車速変更手段は、前記設定車速を前記第2の制限速度に変更する際の所定時間あたりの変化量を小さくすることによって、前記設定車速を前記第2の制限速度に変更する処理を抑制することを特徴とする車両用走行制御装置。
【請求項6】
請求項2または請求項3に記載の車両用走行制御装置において、
前記設定車速変更手段が前記設定車速を前記第2の制限速度に変更する処理を抑制する処理について、ドライバが許可するか否かを指示することができる指示手段をさらに備え、
前記設定車速変更手段は、前記指示手段によってドライバが許可する場合にのみ、前記設定車速を前記第2の制限速度に変更する処理を抑制することを特徴とする車両用走行制御装置。
【請求項7】
請求項1から請求項6のいずれか一項に記載の車両用走行制御装置において、
前記制限速度取得手段によって取得した制限速度が前記第1の制限速度から前記第2の制限速度に変化したことをドライバに報知する報知手段をさらに備えることを特徴とする車両用走行制御装置。
【請求項8】
自車両の速度が設定車速と一致するように車両を制御する車両用走行制御方法であって、
自車両が走行している道路の制限速度を取得し、
取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、前記設定車速を前記第2の制限速度に変更することを特徴とする車両用走行制御方法。
【請求項1】
自車両の速度を検出する車速検出手段と、
ドライバの操作によって、車両が定速走行する際の車速(以下、設定車速)を設定することができる操作手段と、
前記車速検出手段によって検出される車速が前記設定車速と一致するように車両を制御する制御手段と、
自車両が走行している道路の制限速度を取得する制限速度取得手段と、
前記制限速度取得手段によって取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、前記設定車速を前記第2の制限速度に変更する設定車速変更手段とを備えることを特徴とする車両用走行制御装置。
【請求項2】
請求項1に記載の車両用走行制御装置において、
前記設定車速変更手段は、ドライバが前記操作手段を操作することによって前記設定車速を変更してから所定時間以内は、前記制限速度取得手段によって取得した制限速度が前記第1の制限速度から前記第2の制限速度に変化した場合でも、前記設定車速を前記第2の制限速度に変更する処理を抑制することを特徴とする車両用走行制御装置。
【請求項3】
請求項1に記載の車両用走行制御装置において、
前記設定車速変更手段は、ドライバが前記操作手段を操作することによって前記設定車速を変更してから、車両が所定距離を走行する間は、前記制限速度取得手段によって取得した制限速度が前記第1の制限速度から前記第2の制限速度に変化した場合でも、前記設定車速を前記第2の制限速度に変更する処理を抑制することを特徴とする車両用走行制御装置。
【請求項4】
請求項2または請求項3に記載の車両用走行制御装置において、
前記設定車速変更手段は、前記設定車速を前記第2の制限速度に変更する処理を禁止することによって、前記設定車速を前記第2の制限速度に変更する処理を抑制することを特徴とする車両用走行制御装置。
【請求項5】
請求項2または請求項3に記載の車両用走行制御装置において、
前記設定車速変更手段は、前記設定車速を前記第2の制限速度に変更する際の所定時間あたりの変化量を小さくすることによって、前記設定車速を前記第2の制限速度に変更する処理を抑制することを特徴とする車両用走行制御装置。
【請求項6】
請求項2または請求項3に記載の車両用走行制御装置において、
前記設定車速変更手段が前記設定車速を前記第2の制限速度に変更する処理を抑制する処理について、ドライバが許可するか否かを指示することができる指示手段をさらに備え、
前記設定車速変更手段は、前記指示手段によってドライバが許可する場合にのみ、前記設定車速を前記第2の制限速度に変更する処理を抑制することを特徴とする車両用走行制御装置。
【請求項7】
請求項1から請求項6のいずれか一項に記載の車両用走行制御装置において、
前記制限速度取得手段によって取得した制限速度が前記第1の制限速度から前記第2の制限速度に変化したことをドライバに報知する報知手段をさらに備えることを特徴とする車両用走行制御装置。
【請求項8】
自車両の速度が設定車速と一致するように車両を制御する車両用走行制御方法であって、
自車両が走行している道路の制限速度を取得し、
取得した制限速度が第1の制限速度から第2の制限速度に変化した場合に、前記設定車速を前記第2の制限速度に変更することを特徴とする車両用走行制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2012−197076(P2012−197076A)
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願番号】特願2012−104781(P2012−104781)
【出願日】平成24年5月1日(2012.5.1)
【分割の表示】特願2007−115364(P2007−115364)の分割
【原出願日】平成19年4月25日(2007.4.25)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成24年10月18日(2012.10.18)
【国際特許分類】
【出願日】平成24年5月1日(2012.5.1)
【分割の表示】特願2007−115364(P2007−115364)の分割
【原出願日】平成19年4月25日(2007.4.25)
【公序良俗違反の表示】
(特許庁注:以下のものは登録商標)
1.VICS
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]