
車両用走行制御装置及び車両用走行制御方法
【課題】運転者の加減速操作や運転負荷を低減する。
【解決手段】運転者が加減速操作する一つのレバー100Aが中立位置から操作されたことを検出すると、車両MMに加速度若しくは減速度を付与すると共に、上記レバー100Aを中立位置に付勢して無操作状態では上記レバー100Aを中立位置に保持する保持機構100Bを備える。そして、本発明は、上記レバー100Aが中立位置にあることを検出すると、車両MMを停止可能な減速度GNを車両MMに付与する。
【解決手段】運転者が加減速操作する一つのレバー100Aが中立位置から操作されたことを検出すると、車両MMに加速度若しくは減速度を付与すると共に、上記レバー100Aを中立位置に付勢して無操作状態では上記レバー100Aを中立位置に保持する保持機構100Bを備える。そして、本発明は、上記レバー100Aが中立位置にあることを検出すると、車両MMを停止可能な減速度GNを車両MMに付与する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、運転者の加減速操作に応じて目標加速度若しくは目標減速度を求め、その目標加速度若しくは目標減速度となるように、車両の加減速度を制御する技術に関する。
【背景技術】
【0002】
走行制御装置としては例えば特許文献1に記載の技術がある。この技術では、2方向に操作可能なレバーが、ステアリングホイールに設けられている。上記レバーに操作力が付加されない無操作状態では、上記レバーは、ばねに付勢されることで中立位置に戻る。
そして、運転者がレバーを中立位置から一方の方向に操作することで加速操作となり、また、中立位置から他方の方向に操作することで減速操作となる。その加速操作及び減速操作による加速および減速は、それぞれアクセル系統およびブレーキ系統に設けられたモータなどのアクチュエータを駆動することによって行われる。ここで、上記従来技術では、レバーに操作力が付加されずにレバーが中立位置に位置する状態となっているときには、上記加速・減速に関わるアクチュエータを駆動しない。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4400616号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術では、運転者が加減速操作を行うレバーが中立位置に戻っている場合は、制動装置による制動が車両に付加されていない。
ここで、エンジンで走行し且つ自動変速機を備える車両等の車両にあっては、クリープ現象によって、加速操作を行わない場合(レバー操作を行わない場合を含む。)、平坦路では特定の車速(以降クリープ車速と言う。一般に5〜10km/h程度である。)で一定速になる。このため、上記従来技術を備えた車両においては、レバーが操作されていないで中立位置になっている場合、車速がクリープ車速より高いときには車両はエンジンブレーキによって減速していくが、クリープ車速に到達すると車両は減速しなくなり、クリープ車速によって一定速になってしまう。
【0005】
このため、例えば渋滞走行等で、運転者が車両を頻繁に止めようとする場合には、レバーから手を離しただけでは、クリープ車速で一定速になってしまうため、運転者による車両を止めようとする意思が反映されずに、運転者によるレバー操作が必要になる。このことは、運転者にとって、加減速操作に対する負荷の増加となるおそれがある。
本発明は、上記のような点に着目してなされもので、運転者の操作や運転負荷を低減することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明は、車両の中立位置に対し異なる2方向へ運転者が加減速操作する操作体が中立位置から異なる2方向のいずれか一方に操作されたことを検出すると、車両に加速度若しくは減速度を付与すると共に、上記操作体を中立位置に付勢して無操作状態では上記操作体を中立位置に保持する保持機構を備える。そして、本発明は、上記操作体が中立位置にあることを検出すると、車両を停止可能な減速度を車両に付与する。
【発明の効果】
【0007】
本発明によれば、加減速指示するための運転者操作が無い状態においては、車両に停止可能な減速度を付与する。このため、発進と停止を繰り返すような渋滞走行等の走行状態にあっては、加速操作して発進後に、操作体を運転者が離したとき、車両は、停止に至るまで減速し続ける。このように、渋滞走行等の走行状態において、運転者は減速操作のために操作体に力を付加しなくても車両を停止させることが可能となる。
また、クリープ現象が発生する車両において、操作体を無操作状態としても、所定の車速(クリープ車速)で減速しなくなってしまうことがなくなり、車両の動きを一貫性をもって把握できるようになる。
以上のように、本発明によれば、運転者の操作・運転負荷を低減可能となる。
【図面の簡単な説明】
【0008】
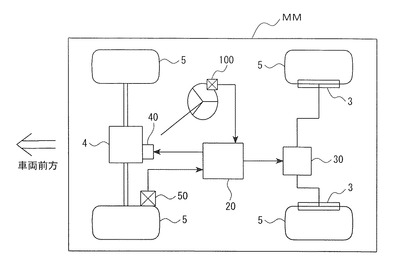
【図1】本発明に基づく実施形態に係る車両の概要構成図である。
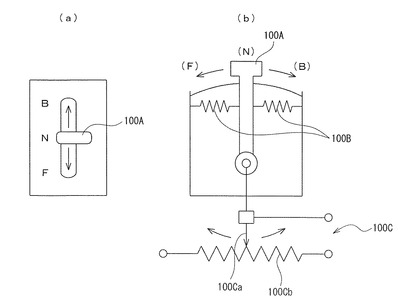
【図2】加減速度入力装置を説明する模式図であって、(a)は上面図、(b)は側面図である。
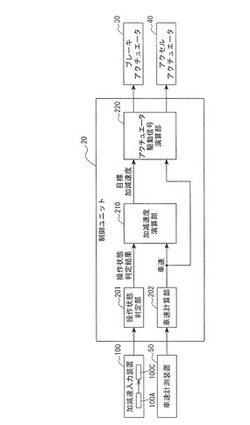
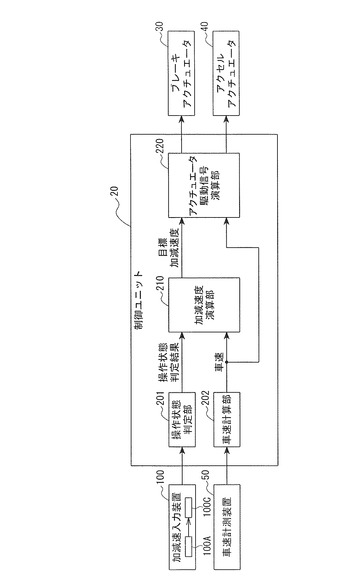
【図3】本発明に基づく実施形態に係る車両用走行制御装置の構成を示すシステム構成図である。
【図4】加減速度演算部210の処理を説明するフローチャートである。
【図5】発進停止を繰り返す渋滞を走行する場合の、加減速度演算部210の処理によって得られる車両の動作の例を説明するタイムチャートである。
【図6】中立位置から減速操作への切り替わり時に、目標加減速度を連続的に変化させたときの動作の例を説明するタイムチャートである。
【図7】中立位置から加速操作への切り替わり時に、目標加減速度を0から連続的に変化させたときの動作の例を説明するタイムチャートである。
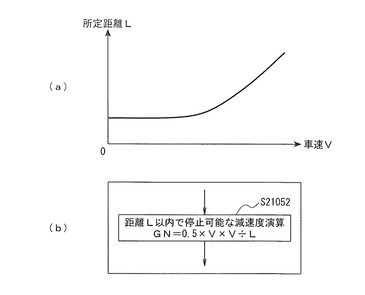
【図8】所定距離以内に停止可能な減速度を求める際の図であって、(a)は車速に対する所定距離の関係性を示す特性図、(b)は図2のステップ2105に替わる処理を示すフローチャートである。
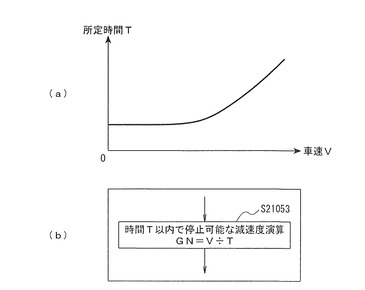
【図9】所定時間以内に停止可能な減速度を求める際の図であって、(a)は車速に対する所定時間の関係性を示す特性図、(b)は図2のステップ2105に替わる処理を示すフローチャートである。
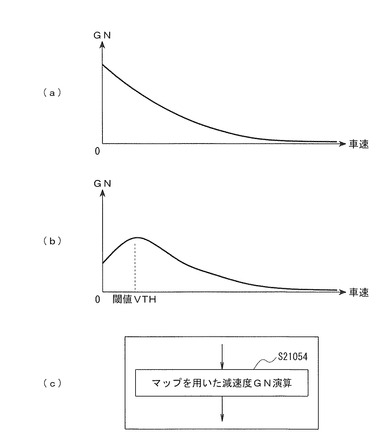
【図10】別例の減速度を説明する図であって、(a)は車速の増加に対して単調に減少する減速度を説明する図、(b)は車速が閾値以下である場合は車速の増加に対して単調に増加し閾値以上では車速の増加に対して単調に減少する減速度を説明する特性図、(c)はその際に図2のステップ2105に替わる処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
次に、本発明の実施形態について図面を参照して説明する。
先に加減速に関する用語について説明する。
以下の説明および図面においては、GF、GN、GBという記号を用いて説明を行う。GFは加速方向の加速度、GN、GBは、減速方向の加速度を示し、GN、GBという記号は車速が減速する際の単位時間当たりの変化率を正の値で表現するものとする。つまり、「GF=0.5m/s2」は加速することを意味する。また、「GN=0.5m/s2」、「GB=0.5m/s2」と表現した場合は、0.5m/s2で減速することを意味する。ただし、単にGと表現した場合は、一般の加速度を示す。つまり、減速する場合はマイナスの値、プラスの値とした場合は加速することを意味する。また、以降の説明では、減速方向の加速度を説明する場合には、「減速度」という言葉を用いて説明する。
【0010】
(構成)
車両MMには、図1及び図3に示すように、車両用走行制御装置の構成として、加減速入力装置100、車速計測装置50、制御ユニット20、ブレーキアクチュエータ30、アクセルアクチュエータ40が搭載されている。
加減速入力装置100は、運転者が加速及び減速指示のために加減速操作を手動で行う操作体を備える。本実施形態の加減速入力装置100の操作体は、図2に示すように、レバー100Aから構成され、そのレバー100Aは、ステアリングホイールやシフトレバーなどの手動で操作可能な運転席近傍の操作部に設けられている。上記レバー100Aは、予め設定した中立位置Nに対し異なる2方向に移動可能つまり運転者が操作可能となっている。異なる2方向として、本実施形態では180度向きが反対方向を例に挙げる。異なる2方向の向きの中立位置での交角は、180度でなくても良い。また、加減速操作の軌道も必ずしも直線状でなくても良い。又、必ずしも手動に限らずアクセルペダルを操作体として同様な機能をもつ構造にしてもよい。
【0011】
また、上記レバー100Aは、バネなどの弾性部材からなる保持機構100Bを備え、その保持機構100Bによって中立位置に向けて付勢されている。このため、レバー100Aは、操作力が付加されていない無操作状態では、中立位置へ自動的に戻って当該中立位置に保持された状態となる。
ここで、上記異なる2方向のうち、中立位置から1方向への操作を加速操作(図2F方向)、他方向への操作を減速操作(図2のB方向)と記載する。
【0012】
また、加減速入力装置100はレバー位置検出部100Cを備える。レバー位置検出部100Cは上記レバー100Aの位置を検出する。レバー位置検出部100Cが検出した位置情報は、レバー100Aが中立位置、加速操作側若しくは減速操作側に位置するのかの判定や、中立位置からの操作量を検出するために使用される。上記レバー位置検出部100Cは、例えば可変抵抗器で構成する。この場合には、操作レバー100Aの移動に伴って摺動子100Caが移動し、その移動する摺動子100Caが抵抗体100Cb上を摺動する構成とする。そして上記摺動子100Caの位置に応じた、摺動子100Caと抵抗体100Cbとの間の電圧値や抵抗値等を、中立位置からの操作量及び操作方向に応じた操作位置情報として出力する。レバー位置検出部100Cは、上記検出する操作位置情報を制御ユニット20に出力する。
【0013】
車速計測装置50は、車速を計測する装置である。本実施形態の車速計測装置50は、車輪速センサから構成される。車輪速センサは、車両MMの車輪5近傍に設けられ、車輪5の回転に応じてパルス信号を車速情報として出力し、その出力は制御ユニット20に入力される。
制動手段としてのブレーキアクチュエータ30は、電動式制動ユニットや油圧式制動ユニット等の制動ユニット3で発生する制動力を制御する制動制御部である。本実施形態では、制動ユニット3として油圧式制動ユニットを例にして説明する。本実施形態のブレーキアクチュエータ30は、制御用負圧ブースターから構成されて、制御ユニット20からブレーキの目標ホイルシリンダ圧を指令値として入力し、入力した目標ホイルシリンダ圧となるように制動ユニット3のホイルシリンダ圧を制御する。
【0014】
アクセルアクチュエータ40は、車両MMを駆動装置の駆動力を調整する駆動力調整装置である。本実施形態では、駆動装置としてエンジン4を例にして説明する。本実施形態のアクセルアクチュエータ40は、制御ユニット20から入力する加速指令値としてのスロットル開度(例えば電気信号として入力する。)に基づき、エンジン4に供給する燃料量の調整弁の開度を制御する電子制御スロットルである。
【0015】
制御ユニット20は、加減速入力装置100と車速計測装置50の出力を入力し、ブレーキアクチュエータ30とアクセルアクチュエータ40とに指令値を出力する機能を持つ、マイクロコンピュータおよびその周辺回路を備えるコントローラである。この制御ユニット20を構成するマイクロコンピュータと周辺回路は、図3に示すように、少なくとも操作状態判定部201、車速計算部202、加減速度演算部210、アクチュエータ駆動信号演算部220を有する構成となっている。
【0016】
上記操作状態判定部201は、加減速入力装置100が出力した電圧値(操作位置情報)を取得し、取得した電圧値をアナログ・デジタル変換する。そして、操作状態判定部201は、変換後の電圧値に基づき、加減速入力装置100が中立位置であるか、加速側に操作されているか、減速側に操作されているかを判定し、その操作状態の判定結果を加減速度演算部210へ出力する。
【0017】
本実施形態の操作状態判定部201では、具体的には、中立位置における電圧値を予め取得して基準電圧値とする。そして、「基準電圧値>取得した電圧値」ならば加速操作、「基準電圧値<取得した電圧値」ならば減速操作、「基準電圧値=取得した電圧値」ならば中立位置と判定する。また、基準電圧値と取得した電圧値との電圧差に基づき操作量を検出すればよい。
【0018】
車速計算部202は、車速計測装置50から車輪5の回転に応じたパルス波を入力して、その入力したパルス波に基づき、1周期に掛かる時間と車輪5の半径とから車速を計算する。そして、その計算した車速を加減速度演算部210に出力する。
加減速度演算部210の処理については後述する。
アクチュエータ駆動信号演算部220は、加減速度演算部210から目標加減速度(目標加速度及び目標減速度)を入力し、目標加減速度を実現可能なブレーキのホイルシリンダ圧の指令値、および、スロットル開度指令値を演算する。
【0019】
ここで、スロットル開度と、そのスロットル開度による車両MMが実際に発生する加速度との関係は強い非線形性を有する。このため、このアクチュエータ駆動信号演算部220では、例えばスロットル開度、現在の車速と発生加速度の関係性を記述した3次元マップや関数等を使用して、目標加速度(あるいは車両質量との関係で求められる目標駆動力)をスロットル開度指令に換算を行う。この制御は複雑であるが、エンジン制御では極一般的に行われる制御である。このため、本実施形態ではその制御の詳細説明を省略する。ブレーキ制御についても、同じように目標減速度からホイルシリンダ液圧へと変換する制御方法について各種の方法が公知として存在する。このため、説明を省略する。
【0020】
上記加減速度演算部210は、操作状態判定部201の判定結果に基づき、加減速入力装置100のレバー100A(操作体)が中立位置にある場合には、車両MMが停止可能な減速度を目標減速度として、アクチュエータ駆動信号演算部220に出力する。上記車両MMが停止可能な減速度は、実験などによって予め定めた規定の減速度である。
【0021】
また加減速度演算部210は、操作状態判定部201の判定結果に基づき、加減速入力装置100のレバー100Aが加速側に操作されている場合には、あらかじめ定めた規定の目標加速度、若しくは加速側への操作量に応じた目標加速度を演算する。また、加減速度演算部210は、加減速入力装置100のレバー100Aが減速側に操作されていると判定された場合には、あらかじめ定めた規定の減速度を目標減速度、若しくは減速側への操作量に応じた目標減速度を演算する。そして、加減速度演算部210は、演算した目標加速度若しくは目標減速度を目標加減速度としてアクチュエータ駆動信号演算部220へ出力する。
【0022】
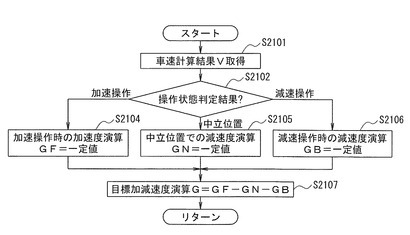
次に、上記加減速度演算部210の処理の一例を、図4に示すフローチャートを参照して説明する。なお、各処理は、所定のタイミング信号(マイコンのクロック信号から生成される)に同期して、予め設定した制御周期で処理を実行する。
まず加減速度演算部210は、ステップS2101にて、車速計算部202で計算された車速Vを取得する。
【0023】
次に、ステップS2102にて、操作状態判定部201から入力された、加減速入力装置100のレバー100Aが中立位置であるか、加速側に操作されているか、減速側に操作されているかの判定結果に基づき、処理分岐の判断を行う。すなわち、ステップS2102では、中立位置にある場合にはステップS2105の処理に移行し、加速側に操作されている場合はステップS2104の処理に移行し、減速側に操作されている場合はステップS2106の処理に移行する。
【0024】
ステップS2105では、中立位置での減速度GNを設定する。その後ステップS2107に移行する。上記中立位置での減速度GNは、例えば、GN=0.05G(≒0.5m/s2)とするなど、減速度GNを一定値に設定するのが最も簡易な方法である。各減速度の大きさについては、実験的に定めるなどの方法を取ればよい。なお、ステップS2105では、GF、GBをゼロクリアする。
【0025】
ステップS2104では、加速操作時の加速度GFを一定値として設定する。その後ステップS2107に移行する。例えば、GF=0.05G(≒0.5m/s2)とする。なお、ステップS2104では、GN、GBをゼロクリアする。
ステップS2106では、減速操作時の減速度GBを一定値として設定する。その後ステップS2107に移行する。例えば、GB=0.1G(≒1.0m/s2)としてGBを一定値に設定する。なお、ステップS2106では、GF、GNをゼロクリアする。
【0026】
ここで、上記減速操作時の減速度GBは、常に中立位置での減速度GN以上に設定する。すなわち、無操作状態である中立位置での減速度GNが、常に減速操作時の減速度GB以下となるように設定する。本実施形態では、GB>GNに設定している。なお、減速操作時の減速度GBは、上記範囲を保った上で、官能評価により設定することが可能である。また、減速操作時の減速度GBを操作量に応じた可変値に設定する場合であっても、その最低値を減速度GN以上に設定する。
【0027】
ステップS2107では、前述の処理で演算した中立位置での減速度GN、および、加速操作時の加速度GF、および減速操作時の減速度GBに基づいて、目標加減速度Gを演算する。具体的には、下記式に基づき目標加減速度Gを演算する。その後、次の制御周期において、上記ステップS2101の処理に移行する。目標加減速度Gは、正の値であれば目標加速度に対応し、負の値であれば目標減速度に対応する。
G=GF−GN−GB
加減速度演算部210は、以上の処理によってアクチュエータ駆動信号演算部220に出力する目標加減速度の演算処理を実施する。
【0028】
(動作その他)
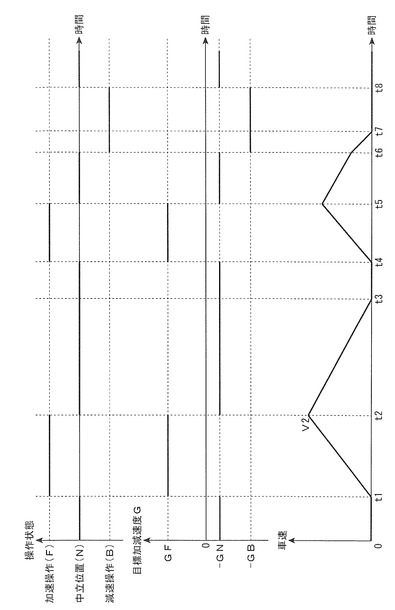
上記加減速入力装置100のレバー100Aの操作状態に応じて、上記処理によって得られる車両MMの動作の一例を図5に示す。この図5は、車両MMが発進・停止を繰り返す、渋滞した環境で走行する場合を想定した時系列での車両状態を示すタイムチャートの図である。
ここで図5中、上段は、レバー100Aの操作状態を表し、レバー100Aの操作結果を操作状態判定部201で判定した後の結果を示している。このため、レバー100Aの状態は、加速、減速、中立の3パターンで表している。図5の中段は、加減速度演算部210で演算された目標加減速度Gの状態を表している。先に説明したように、本実施形態では、加速側、減速側、中立時のそれぞれが一定の加速度、減速度(GB,GN,GF)を発生するように設定している。さらに、図5の下段は、上記目標加減速度に応じて生じた車速の変化を示している。
【0029】
次に、図5を参照しつつレバー100Aの操作に伴う車両動作の例について説明する。
まず、時刻0〜時刻t1の間において、車両MMは停止(車速=0km/h)しており、操作状態は中立位置となっている。この場合、操作状態判定部201では操作状態を中立位置と判定しているため、加減速度演算部210では目標加減速度Gを中立位置での減速度GNに基づき、G=−GNと演算している。この結果、ブレーキアクチュエータ30には、目標減速度がGNに対応するホイルシリンダ圧指令が送信し続けられるため、車両MMは停止し続ける。
【0030】
その後、渋滞路において先行車両が発進したとする。それに応じて、運転者が、時刻t1において、加減速入力装置100のレバー100Aを中立位置から加速側に操作を開始したとする。この場合、加減速度演算部210で演算される目標加減速度Gは、加速操作時の加速度GFとなり、車両MMは加速する。その後、時刻t2まで加速操作を継続して、車速V2に到達する。本実施形態では、GFが一定であるため、単純に下記式でV2を求めることが出来る。
V2=GF×(t2−t1)
【0031】
次いで、先行する車両MMが再び停止しようと減速したとする。そして、運転者が、時刻t2において、加減速入力装置100のレバー100Aを加速側に操作することを止めて加速操作を止めると(レバー100Aから手を離すと)、加減速入力装置100のレバー100Aは、保持機構100Bによって中立位置に自動的に戻る。この結果、加減速度演算部210で演算される目標加減速度Gは、中立位置での減速度GNに基づき、G=−GNとなり、車両MMは減速を開始する。
【0032】
本実施形態の車両用走行制御装置では、エンジン4のクリープ力のあるなしにかかわらず、レバー中立位置の状態にしておくことで、車両MMが停止するまで更には車両MMが停止した後も、減速度を発生し続ける。このため、車両MMは減速を継続し、時刻t3の時点で停止する。その後は、時刻0における車両MMの状態と同様に、加減速度演算部210から目標減速度(G=−GN)が出力され続ける。この結果、ブレーキアクチュエータ30には、GNに応じたホイルシリンダ圧指令が送信し続けられることで、車両MMは停止し続ける。
【0033】
以上の動作で示したように、中立位置での目標減速度GNは、車両MMが停止可能な減速度である。このため、発進と停止を繰り返す渋滞した環境を走行する場合においては、発進後に再び車両停止する際において、運転者は減速のために加減速入力装置100のレバー100Aに操作力を付加しなくとも車両MMを停止させることが可能になる。これによって、運転者の加減速操作のための操作負荷が低減される。
【0034】
また、上記ステップS2105で設定する中立位置での減速度GNは、加減速入力装置100のレバー100Aが減速側に操作されたときに発生させる減速度GB(ステップS2106で設定する。)より小さい値となるよう設定している。つまり、例えば、先に図4のフローチャートで示したように減速度GN及びGBをともに固定に設定する例であれば、中立位置での減速度GNは、減速側の減速度GBより小さい値とする。
【0035】
この動作について、再び図5を用いて説明する。
運転者が、時刻t4において再び加減速入力装置100のレバー100Aを中立位置から加速側に操作を開始し、更に時刻t5において運転者がレバー100Aの操作を止めると(レバー100Aから手を離すと)、時刻t5から、上述と同様に車両MMは減速度G=−GNにて減速を開始する。
【0036】
このとき、減速開始から車両MMがまだ停止していない時刻t6において、運転者が加減速入力装置100のレバー100Aを中立位置から減速側に操作を開始すると、加減速度演算部210で演算される目標加減速度Gは、減速操作時の減速度GBに基づき、G=−GBとなり、つまりステップ状の目標減速度が増加して車両MMは減速度GBにて減速する。そしてその後、時刻t7にて車両MMは停止する。時刻t8にて減速操作を止めたとしても、つまり運転者がレバー100Aから手を離したとしても、時刻0の状態と同様、車両MMは停止し続ける。
【0037】
ここで、時刻t5〜t6までの車速変化の傾き(すなわち減速度)は、時刻t6〜t7までの車速変化の傾きよりも緩やかになっている。すなわち、中立位置にて発生する減速度GNは、減速操作時に発生する減速度GBよりも小さい。したがって、運転者がレバー100Aが中立位置での減速度よりもっと大きな減速としたいときに、減速の調整が可能となるため、運転者は、自らの意思を反映しやすくなる。この結果、減速度の調整を容易に行うことができる。
【0038】
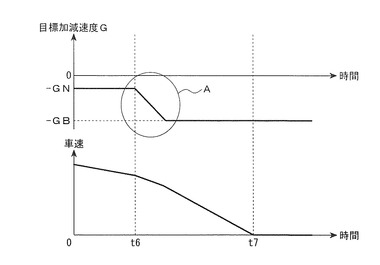
ここで、本実施形態では、時刻t6においてGB>GNとなるように、ステップ状に、つまり不連続に減速度が変化する例を示している。ただし、GB≧GNを満足すれば、例えば図4に示すパターンで変化しても良い。すなわち、中立位置の減速度GNから減速操作時の減速度GBに切り換える際に、予め設定した勾配をもって目標減速度Gを徐々に変化させるようにしても良い。つまり、図6に示す時刻t6〜t7の別パターンでは、図6のA部分において、減速度の切り替わり時に、目標加減速度Gが−GNから−GBとなるまで連続的に変化するように(急峻に変化しないように)、過渡的な減速度変化率にリミッターを設けた例を示している。これにより、運転者の減速意図を反映しつつ、発生する車速変化を滑らかにすることができて、乗心地がよくなる効果も得られる。
【0039】
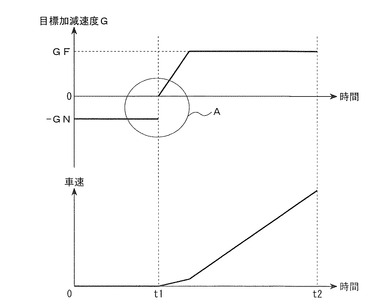
また、加速操作時の加速度GFは、中立位置での減速度GNの設定値に関係なく、加速側の0以上の値としている。このため、例えば、図5の時刻t1において、目標加減速度Gが、負の値−GNの状態から、加速操作を検出すると不連続に正の値GFに変化することに対応する。
図7は、上記加速操作時の減速度の別の設定例、及びそのときの動作例を示す図である。
図7に示す例では、発進直後の車速変化の滑らかさを求めて、目標加減速度Gの変化率に制限を掛けた例である。このようにする場合にあっても、目標加減速度Gの始点は0以下にならないようにする(図7のAを参照)。
【0040】
また、本実施形態では、レバー100Aの無操作時、すなわち中立位置の状態では減速度GNが発生する構成としている。運転者が中立位置のレバー100Aを加速側に操作した場合には、運転者が加速したいという意思表示をしたと考えられるが、このとき本実施形態では、無操作時と加速操作との間の加速度を敢えて不連続としたことにより、運転者の加速操作開始に対し速やかに加速が開始されるようになる。
【0041】
なお、減速側から加速側まで加速度の変化を連続となるように設定すると、加速側にレバー100Aを操作しても、車両MMに加速しない領域ができてしまうが、本実施形態では、そのような問題を回避出来る。
以上の説明では、加減速度演算部210に実装する加速操作、減速操作、中立位置における目標加減速度をそれぞれ予め定めた一定値(GF,GN,GB)である例を示してきた。しかしながら、この目標加減速度は一定値である必要はない。
【0042】
ここで レバー100Aは操作体を構成する。操作状態判定部201及び加減速度演算部210、ステップS2101〜S2107は、加減速度演算手段を構成する。後述のステップS21052又はステップS21053は、停止可能減速度算出手段を構成する。ブレーキアクチュエータ30は制動手段を構成する。
【0043】
(本実施形態の効果)
(1)レバー100A(操作体)は、車両の運転者が加速及び減速指示のために中立位置に対し異なる2方向へ操作可能に構成される。保持機構100Bは、上記操作体を中立位置に付勢して無操作状態では当該操作体を中立位置に保持する機構である。加減速度演算手段は、上記操作体の中立位置から上記2方向のうちの一方向への操作を加速操作として検出し、上記操作体の中立位置から上記2方向のうちの他方向への操作を減速操作として検出して、検出した加速操作若しくは減速操作に応じた目標加速度若しくは目標減速度を演算し、上記操作体が中立位置にあると判定すると、車両を停止可能な大きさの目標減速度を演算する。制動手段は、上記加減速度演算手段が演算した目標減速度に基づいて、車両を制動させる。
【0044】
運転者がレバー100A(操作体)を操作していないことで、レバー100Aが中立位置にある場合には、車両MMを停止可能な減速度を発生させる。
このため、例えば、発進と停止を繰り返すような渋滞走行を想定した場合、レバー100Aを加速方向に操作して発進し、その後レバー100Aを離したとき、車両MMは、停止に至るまで減速し続ける。これによって、運転者は減速のためにレバー100Aに力を付加しなくとも車両MMを停止させることが可能になる。
また、クリープ車速を発生する車両MMであっても、ある車速(クリープ車速)で、減速しなくなってしまうことがなくなり、車両MMの動きを一貫性をもって把握できる。
この結果、運転者による加減速指示の操作や運転負荷が低減する。
【0045】
(2)上記操作体が中立位置にあると判定したときの目標減速度は、上記減速操作に応じた目標減速度の最小値以下である。
運転者がレバー100Aを操作して明示的に減速操作を行ったときの減速度GBを、レバー中立位置すなわち運転者が何も操作していないときに発生する減速度GN以上になるようにした。このため、レバー中立位置で発生する減速度GNでは減速度が足りないと運転者が感じたときには、自らの意思によって減速度を増加させるレバー100Aの操作をすることができるようになる。これにより、車両MMの減速度を調整することが可能となり、運転者の減速度の微調整が容易になる。
【0046】
(3)上記加速操作に応じた目標加速度の最小値は、加速側のゼロ以上の大きさの値である。
運転者が中立位置からレバー100Aを加速側に操作した際には、運転者が加速したいという意思表示をしたと考えられる。これに鑑み、レバー100A無操作時には、負の加速度である減速度が発生する構成としている。そして、加速操作時の目標加速度を加速側のゼロ以上の大きさにして、無操作時と加速操作の間の加減速度を敢えて不連続としている。
【0047】
この構成によって、運転者が中立位置からレバー100Aを加速側に操作すると、運転者の加速操作に応じて速やかに加速が開始されるようになる。
なお、加減速度を減速側〜加速側まで連続となるように設定すると、加速側にレバー100Aを操作しても加速しない領域ができてしまうが、本実施形態では、この問題が無くなる。
【0048】
(変形例)
(1)制御ユニット20が、車両状態に応じて、予め設定した停止距離である中立制動停止距離内で車両MMを停止可能な減速度を求める停止可能減速度算出部を備える。そして、上記停止可能減速度算出部が求めた減速度を、上記操作体が中立位置にあると判定したときの目標減速度とするようにしてもよい。
この場合には、発進と停止を繰り返すような渋滞を走行する場合において、運転者が操作レバー100Aを操作しない際にどの程度の距離で停止するのかを想定しやすくなる。従って、例えば前走車が停止した場合などに、自車が停止位置にどの程度まで近付いたらレバー100Aを中立位置に戻せば良いかを理解しやすくなる。これによって、運転者の運転負荷が低減される。
【0049】
すなわち、上述した実施形態では、上記ステップS2105で設定する、中立位置での減速度GNを一定値として設定した。この中立位置での減速度GNは、車両MMの状態に基づき、予め設定した距離である中立制動停止距離以内で停止可能な減速度としてもよい。例えば、車速に基づき、中立制動停止距離以内で停止可能な減速度を演算し、その演算した減速度を中立位置での減速度GNとする。
【0050】
具体的には、上記ステップS2105の代わりに図8(b)で示すステップS21052を使用し、下記式によって減速度GNを演算する。ここで、中立制動停止距離をLとし、上記ステップS21012で取得した車速Vとする。このステップS2105は、停止可能減速度算出部を構成する。
GN=0.5×V2÷L
【0051】
ここで、中立制動停止距離Lは、あらかじめ実験的に求めておく。例えば、図8(a)に示すように、車速Vに対する停止可能な中立制動停止距離Lの関係性を定め、加減速度演算部210のプログラムに反映させておくのが良い。中立制動停止距離Lは、比較的車速が低い領域で一定値を保つ範囲に設定しておくことが効果的である。これにより、中立制動停止距離Lが一定値を保つ範囲内の車速であれば、車速Vの値が異なっていても、レバー100Aを中立位置にしてから車両MMが停止するまでの車両MMの移動距離を常に一定とすることが可能となる。
【0052】
このようにすると、レバー100Aの操作を止めてから車両MMが停止するまでの距離に着目して運転するシーンにおいて、上記車両用走行制御装置は利用しやすいという効果が発生する。例えば、発進と停止を繰り返す渋滞シーンにおいて発進後に再び車両MMを停止するときに、運転者は、停止するまでの距離を想定することが可能となり、停止させる位置どの程度近づいたら、または先行車に対する距離がどの程度になったら、操作レバー100Aを中立位置に戻せば良いかが理解しやすくなる。これによって、運転者の操作負荷が低減される。
【0053】
(2)制御ユニット20が、車両状態に応じて、予め設定した時間内で車両MMを停止可能な減速度を求める停止可能減速度算出部を備え、上記停止可能減速度算出部が求めた減速度を、上記操作体が中立位置にあると判定したときの目標減速度とするようにしてもよい。
この場合には、停止するまでの時間を想定して、レバー100Aを中立位置に戻すことが可能となり、発進と停止を繰り返す渋滞シーンにおいて発進後に再び車両停止するときに、運転者は、停止するまでの時間を想定して操作レバー100Aを中立位置に戻すことが可能となるので、運転者の操作負荷が低減される。
【0054】
すなわち、中立位置での減速度GNを、車両状態に基づき、中立位置になった時点から予め設定した所定時間である中立停止時間以内に停止可能な減速度に設定しても良い。例えば、車速に基づき、中立停止時間以内に停止可能な減速度を演算し、その演算した減速度を中立位置での減速度GNとする。
具体的には、上記ステップS2105の代わりに図9(b)で示すステップS21053を使用し、下記式によって減速度GNを演算する。ここで、中立停止時間をTとし、上記ステップS2101で取得した車速Vとする。このステップS2105は、停止可能減速度算出部を構成する。
GN=V÷T
【0055】
ここで、中立停止時間Tは、あらかじめ実験的に決定しておき、例えば、図9(a)に示すように、車速Vに対する停止可能な中立停止時間Tの関係性を定め、加減速度演算部210のプログラムに反映させておくのが良い。中立停止時間Tは、比較的車速が低い領域で一定値を保つ構成としておくのが効果的である。
例えば、車速20km/h以下の領域で、中立停止時間T=3秒と設定しているとする。中立位置になったときの車速Vが10km/hであれば減速度GNは、約0.93m/s2と計算される。また、車速Vが20km/hであれば減速度GNは、約1.85m/s2と計算される。
【0056】
このようにGNを設定することで、車速20km/h以下であれば、車速Vが異なっていても、中立位置にした時点から停止するまでの時間を常に一定とすることが可能となる。このようにすると、停止するまでの時間を重要視したいシーンでは利用しやすいという効果が発生する。例えば、信号器に信号切り替わりまでの時間が表示されているような場面では、時間とタイミングを合わせてレバー100Aを中立位置に戻すことで、目的とする停止位置でちょうど停止するような減速度を発生することができる。このことは、レバー100Aの操作1回だけで、最後に微調整することなく停止する効果につながる。
【0057】
(3)上記操作体が中立位置にあると判定したときの目標減速度は、車速が小さい場合に比べて、車速が大きい場合の方が小さいように設定しても良い。例えば、車速の増加に伴い単調に減少するように設定する。
一般の交通環境を考えた場合、渋滞路のような周辺の車両MMまで含めた車速が低い場面においては、頻繁に停止することから、比較的大きな減速度が必要なシーンが多い。
【0058】
逆に渋滞路を抜けて、交通流がスムーズになってくると、車速が上昇して車速の変動がそれほど大きくなくなる。このように交通の流れに乗って走るのに必要な減速度は、小さいことが多くなってくる。
これに対し、変形例(3)のように設定すると、運転者が操作レバー100Aによって予め設定した車速まで到達して、レバー100Aを離した際の減速度が、上記のような一般的な交通環境にマッチした減速度となる。このため、運転者が明示的に減速操作を行わなくても交通の流れに乗って走ることができる領域が拡大し、結果として運転者の操作負荷が減少する。
【0059】
すなわち、上記ステップS2105に代わりに図10(c)に示すステップS21054で処理を行い、そのテップS21054の処理で設定される、中立位置での減速度GNは、図10(a)に示すように、車速の増加に伴い単調に減少する特性に基づいて設定しても良い。
例えば、上記ステップS2105において、予め設定した減速度マップに基づき、上記ステップS2101で取得した車速Vに基づいて、減速度GNを演算する。
【0060】
上記予め設定した減速度マップは、例えば、
車速V=0km/h時 : 減速度GN=1.5m/s2
車速V=10km/h時 : 減速度GN=1.2m/s2
車速V=20km/h時 : 減速度GN=0.7m/s2
車速V=30km/h時 : 減速度GN=0.5m/s2
というように、車速に対する減速度のマップを予め設定しておく。
この場合には、車速が高ければ高いほど、比較的小さな減速度が発生し、また、車速が低ければ低いほど比較的大きな減速度が発生する。
一般の交通環境を考えた場合、渋滞路のような周辺の車両MMまで含めた車速が低い場面においては、頻繁に停止する。従って、このような場面では、比較的大きな減速度が必要なシーンが多い。
【0061】
逆に渋滞路を抜けて、交通流がスムーズになってくると、車速が高くなると共に交通の流れに乗って走るようになる。この場合には、車速の変動がそれほど大きくなく、交通の流れに乗って走るのに必要な減速度は小さいことが多くなってくる。そしてこの変形例では、運転者のレバー100Aの操作によって車両MMがある車速まで到達してから、レバー100Aを離した際の減速度が、上記のような一般的な交通環境にマッチした減速度となるため、運転者が明示的に減速操作を行わなくても交通の流れに乗って走ることができる領域が拡大する。この結果として、運転者の操作負荷が減少する。
【0062】
(4)さらに、上記操作体が中立位置にあると判定したときの目標減速度は、車速が予め設定した閾値以下では車速の増加に伴い増加し、車速が予め設定した閾値を越えると車速の増加に伴い減少するようにしても良い。たとえば、上側に凸の1個の極大値を持つ曲線で減速度を規定する。
変形例(3)の構成に加えて、さらに車両MMの停止間際には減速度を小さくすることで、停止間際の車両MMの挙動を小さくすることが可能となる。これによって、いわゆる、かっくんブレーキが防止できるので、運転者の乗り心地悪化を防止することができる。
【0063】
すなわち、中立位置の減速度GNは、車速に基づき図10(b)のように設定しても良い。
図10(b)に示すように、予め車速閾値VTHを設け、車速が閾値VTHより小さい領域では、減速度GNを車速の増加に伴い単調に増加するように演算し、車速が閾値VTHより大きい領域では、減速度GNを車速の増加に伴い単調に減少するように演算する。
【0064】
なお、上記車速閾値VTHは、例えば、5km/hなど、通常運転時における停止間際の車速に設定すればよい。または、車両MMの停止間際の速度においてブレーキシューとブレーキディスクの摩擦係数が変化する事が一般的に知られているため、この摩擦係数の変化する車速を実験的に求め、その車速を車速閾値VTHとして設定しても良い。
例えば、上記ステップS21054の処理で用いる、減速度の特性マップを以下のように替える。
【0065】
車速V=0km/h時 : 減速度GN=1.0m/s2
車速V=3km/h時 : 減速度GN=1.1m/s2
車速V=5km/h時 : 減速度GN=1.3m/s2
車速V=10km/h時 : 減速度GN=1.1m/s2
車速V=20km/h時 : 減速度GN=0.7m/s2
車速V=30km/h時 : 減速度GN=0.5m/s2
そして、上記ステップS2101で取得した車速Vに基づいて、減速度GNを演算する。
または、減速度の特性マップの代わりに、図10(b)のような形状特性を持つ極値を一つもち、ピークがVTHになるような連続的な関数を使用し、その関数に基づき減速度GNを求めても良い。
【0066】
この変形例では、「V>VTH」の範囲では、車速が高ければ高いほど、比較的小さな減速度が発生し、低ければ低いほど比較的大きな減速度が発生し、かつ、「V<VTH」における停止間際の車速の範囲では、比較的小さな減速度しか発生しない。
この場合には、車両MMの停止間際の車両MMの挙動を小さくすることが可能となるので、運転者の乗り心地悪化を防止することが可能となる。
【0067】
(5)次に、上記中立位置での減速度を、車速に応じて設定する別の例を説明する。以下の例では、減速度GNの設定を、足で操作するアクセル(加速操作子)とブレーキ(減速操作子)とを搭載した通常の車両MMを運転する複数の運転者の運転行動から収集したデータを統計処理し、その統計処理をした後のデータに基づいて設定する場合を例示する。
【0068】
「第1の別例」
第1の別例では、上記操作体が中立位置にあると判定したときの目標減速度は、予め設定した車速毎の減速度に基づき決定する。上記車速毎の減速度は、複数の運転者による各運転者毎の加減速操作と該加減速操作により車両MMに発生した加速・減速パターンのデータである収集データを、統計処理して抽出した値に基づき設定する。上記収集データは、加速操作用の操作体及び減速操作用の操作体を備え且つその2つの操作体が無操作の状態では目標減速度がゼロの車両MMを上記各運転者が運転して収集したデータである。
【0069】
この場合には、複数の運転者からデータを収集し、その収集したデータを統計処理することで抽出したデータに基づいて中立位置での減速度を設定しているので、中立位置での減速度を、多くの人の感覚にあう値に設定可能となる。
すなわち、収集データを、通常のアクセル(加速操作用の操作体)とブレーキ(減速操作用の操作体)を持つ車を使用し、通常の走行時における速度変化とアクセルおよびブレーキ操作を同期しながら時系列に収集する。このデータ収集を複数の運転者による各運転にてそれぞれ実施する。
【0070】
その収集したデータを統計処理して抽出したデータに基づいて減速度マップを作成する。減速度マップは、速度と減速度の関係を示し、例えば、次のような方法で作成する。この減速度マップを図10(c)で適用するマップとして使用すればよい。なお、「減速度マップ」が車速毎の減速度の情報となる。
すなわち、上記収集データを予め設定した所定の分解能の速度ごとに分割し、その分割した速度ごとに、統計処理を実施して、対応する速度における減速度の頻度を求める。
【0071】
対応する速度における減速度の頻度を求める一つの方法としては、例えば、分解能を2km/hとし、速度20km/h〜22km/hの間での減速度頻度を求める場合、運転者全員分の全走行区間のデータから、速度が、「速度20km/h〜22km/h」の間のときに観測された減速度を抽出し、ある減速度になる頻度をヒストグラムとして求めることで実施する。例えば、すべての運転者が全走行区間において「速度20km/h〜22km/h」の間で走行しているときの減速度が、90%は0.05m/s2、10%は0.06m/s2であるとする。この場合、ヒストグラムの分解能を0.01m/s2として設定すれば、0.05m/s2では90%の頻度(つまり、0.05m/s2±(0.01÷2)の区間の頻度)、0.06m/s2では10%の頻度(つまり、0.06m/s2±(0.01÷2)の区間の頻度)、他の減速度では、頻度が0%というヒストグラムができる。上記のような方法によって、2km/h間隔で全ての車速における減速度頻度ヒストグラムを作成する。
【0072】
次に、上記統計データに基づき中立時の減速度として活用する方法を説明する。
これは、例えば、各車速における最頻値を示した減速度をその車速における減速度として適用すればよい。先の例の場合、速度20km/h〜22km/hのときレバー100Aが中立であれば、0.05m/s2が最頻値であるので、この値を、速度20km/h〜22km/hの場合での減速度GNとする。このようにして減速度マップを作成し、予め記憶部に記憶しておく。
ここで、上記減速度マップは、例えば、車速毎の減速度としてマップとして保存してもよいし、ヒストグラムを滑らかに結ぶ曲線を当てはめてグラフや関数として保存してもよい。なお、実際に適用するときは、中立時における減速度を速度に応じた減速度として設定し減速させればよい。
【0073】
「第2の別例」
第2の別例では、上記車速毎の減速度は、上記収集データのうちの、加速操作用の操作体が加速操作状態から無操作となった瞬間または加速操作用の操作体が加速操作状態から無操作となった直後から予め設定した時間以内に車両MMに発生している減速度と、上記加速操作用の操作体が加速操作状態から無操作になった瞬間の車速とに基づき設定する。
この場合には、複数の運転者からデータを収集し、その収集したデータを統計処理することで抽出したデータに基づいて中立位置での減速度を設定している。このため、中立位置での減速度を、多くの人の感覚にあう値に設定可能となる。特に、無操作となったときのデータを使用することで、より中立位置での減速度を、多くの人の感覚にあう値に設定可能となる。
【0074】
次に、上記第1の別例で説明した収集データの統計データに基づく、速度に対する減速度マップの作成方法の第2の別例を説明する。速度に対する減速度マップが上記車速毎の減速度の情報となる。
第2の別例での減速度マップの作成方法を説明する。
ここでは、収集したデータの中から、アクセルから足を離した瞬間、つまりレバー100Aを中立にしたと同等の状態になった瞬間の減速度、または、その瞬間から予め設定した設定時間内での減速度とその変化を上記収集データから抽出する。つまり、このデータは、運転者が加速側に操作中の状態から、アクセルをオフしたあとの減速度の頻度を求める。すなわち、減速を始めたいときの減速度の頻度を求める。
【0075】
具体的な減速度マップの求め方は、例えば減速度マップの作成に使用する速度を、アクセルを離した瞬間の速度として、第1の別例と同様、予め設定した所定の速度ごとのヒストグラムとして求めればよい。また、ヒストグラムを作る際、減速度は、アクセルオフした瞬間(つまり0.1秒程度の非常に短い時間で見たときの)減速度としてもよいし、予め設定した所定の時間長さ(2〜3秒程度でもよいし10秒程度としてもよい)の範囲で起こる減速の平均値としてもよい。
【0076】
レバー100Aが加速操作状態から中立位置になった瞬間だけ、上記操作体が中立位置にあると判定したときの目標減速度として、上記第2の別例の適用して求めた車速毎の減速度(減速度マップ)を適用しても構わない。
すなわち、上記第2の別例で作成した、速度に対する減速度の集まりである減速度マップは、レバー100Aが加速側から離して中立にした瞬間だけに適用し、その後のレバー100A中立状態のときは、上述の減速度マップ(例えば第1の別例で説明した減速度マップ)を適用する、という方法で使用しても良い。
【0077】
このように、実際の走行パターンにおいて実際にアクセルから足を離した瞬間またはその後の減速の傾向を適用しているため、本実施形態のように加減速指示にレバー100Aを用いた場合におけるレバー100Aを中立位置にした瞬間の減速の度合いが、実際の運転フィーリングとより一層近いものとすることが可能となる。
【0078】
「第3の別例」
上記第1の別例で説明した収集データの統計データに基づく、速度に対する減速度マップの作成方法の第3の別例を説明する。
第3の別例では、加速操作用の操作体及び減速操作用の操作体を備え且つその2つの操作体が無操作の状態では目標減速度がゼロの車両MMを、複数の運転者がそれぞれ運転して収集したデータであって、車両MMに発生した速度変化の時系列データに基づき、車両MMに発生した速度変化のパターンを抽出する。そして、その抽出した速度変化のパターン毎にそのパターンに応じた減速度を求めて、その抽出した速度変化のパターンと対応する減速度をパターン参照データとして記憶しておく。そして、車両MMの速度変化のパターンと上記記憶している速度変化のパターンとが類似性が高いと判定すると、その類似性が高いと判定された上記記憶している速度変化のパターンに対応する減速度を、上記操作体が中立位置にあると判定したときの目標減速度に設定する。
【0079】
この場合には、複数の運転者からデータを収集し、その収集したデータを統計処理することで抽出したデータに基づいて中立位置での減速度を設定している。このため、中立位置での減速度を、多くの人の感覚にあう値に設定可能となる。特に時系列の速度変化パターンを利用することで、中立位置での減速度を、より多くの人の感覚にあう値に設定可能となる。
【0080】
上記第2の別例では、アクセル操作中からアクセルを離した瞬間をトリガとして、その瞬間からある所定時間内の減速度を抽出した。これに対し、第3の別例では、アクセルを離した瞬間だけではなく、予め設定した一定時間の速度変化パターンを抽出し、その速度変化と類似したパターンが観測された直後の減速度の統計データを抽出する。この抽出したデータの組がパターン参照データとなる。また、この抽出データは、第2の別例と同様に、ある速度およびその速度パターン観測ごとにおける減速度の頻度データとして減速度マップを作成する。
【0081】
ただし、第2の別例のヒストグラムは予め設定した分解能に区切った速度ごととしたが、速度だけでなく、この第3の別例での減速度マップは、速度パターンの変化ごとの減速度ヒストグラムとしてデータをマップ化する。
例えば、50km/h→51km/h→50km/h→51km/hのような速度変化が観測された場合、つまり、ある速度(この例では、50km/h)を中心に、同じ値となるよう振動しながらの速度調整がある場合、その直後の減速度は、減速度0.00001m/s2(つまりほとんど減速しない)になる頻度が高い、と統計データから抽出されたとする。その場合は実際の減速度マップは、「50km/h→51km/h→50km/h→51km/h」という速度変化に対し、減速度を0.00001m/s2と設定する。
【0082】
また、他にも、例えば、5km/h→4.8km/h→4.6km/h→4.4km/hと5km/h付近で単調減少するという速度変化において、統計データから、そのときは、減速度が0.01m/s2という値が高かったとする。その場合、同じように、「5km/h→4.8km/h→4.6km/h→4.4km/h」の場合は、減速度0.01m/s2と設定する。
【0083】
このような方法で、多くの統計データの中から頻繁に観測される速度変化のパターンを抽出し、その速度変化パターンの直後に頻度高く現れる減速度が存在する場合、速度変化に対する減速度マップとして設定する。
なお、実際の適用時は、「50km/h→51km/h→50km/h→51km/h」や「5km/h→4.8km/h→4.6km/h→4.4km/h」など、上記の減速度マップに存在する速度変化パターンと似た速度変化を観測した場合、上記のマップに登録されている減速度を適用するようにすればよい。
【0084】
なお、上記の減速度マップは、速度変化だけでなく、「0.02m/s2で加速、0.02m/s2で減速、0.02m/s2で加速」などの加速度の変化としてもよい。この場合は、適用する際も、マップの登録内容とあわせ、マップに登録されている加速、減速変化と類似した場合にこのマップに登録されている減速度を適用するようにすればよい。
ここで、速度変化や加速度変化パターンとの類似度は、時系列データを1次元的に並べた数値の相関を求めるなど、一般的な統計手法を適用すればよい。
【0085】
(6)制御ユニット20は、車両状態に応じて、中立制動停止距離内で車両MMを停止可能な減速度を求める上記停止可能減速度算出部を備える。そして、上記停止可能減速度算出部が求めた減速度を、上記操作体が中立位置にあると判定したときの目標減速度とする。このとき、上記中立制動停止距離は、複数の運転者による各運転者毎の加減速操作と該加減速操作により車両MMに発生した加速・減速パターンのデータである収集データを、統計処理して抽出した値に基づき設定する。上記収集データは、加速操作用の操作体及び減速操作用の操作体を備え且つその2つの操作体が無操作の状態では目標減速度がゼロの車両MMを上記各運転者が運転して収集したデータである。
【0086】
この場合には、複数の運転者からデータを収集し、その収集したデータを統計処理することで抽出したデータに基づいて中立制動停止距離を設定しているので、レバー100Aを中立位置にしてからの停止距離を、多くの人の感覚にあう値に設定可能となる。
すなわち、レバー100Aを中立位置にしたときに、減速度GNで停止するまでの距離である中立制動停止距離Lを、上記第1の別例で説明した収集データの統計データに基づいて求めもよい。
【0087】
この場合、抽出するデータは、ある速度から減速を始めて停止するまでの距離、もしくは、ある停止した時点からさかのぼって減速を始めたときの速度と、その瞬間から停止するまでに走行した距離などに基づき抽出する。
上記第1〜第3の別例では、収集データに基づき速度に対する減速度マップを求める。これに対し、この変形例では、速度に対する距離として求めるものである。
ある速度でアクセルをオフしてから停止するまでの距離がある値である頻度が高い場合、その距離を中立制動停止距離Lとして適用すればよい。
【0088】
また、この中立制動停止距離Lは、速度と距離だけではなく、第3の別例の方法を併用し、ある速度パターン観測時とその速度パターン観測から停止するまでの距離として統計データをまとめ、第3の別例の方法と同様、類似速度変化パターン観測時の減速度の計算に適用してもよい。これは、例えば、抽出するデータを「停止した時点からさかのぼって減速を始めたときの速度とその瞬間から停止するまでに走行した距離」とし、この停止した時点からある時間分だけさかのぼったときの速度変化を観測して、上記第3の別例と同様、ある速度変化パターンに対して非常に頻度の高い停止距離が存在する場合に適用するようしても良い。
【符号の説明】
【0089】
3 制動ユニット
4 エンジン
20 制御ユニット
201 操作状態判定部
202 車速計算部
210 加減速度演算部
220 アクチュエータ駆動信号演算部
30 ブレーキアクチュエータ
40 アクセルアクチュエータ
50 車速計測装置
100 加減速入力装置
100A レバー
100B 保持機構
100C レバー位置検出部
G 目標加減速度
GB 減速操作時の減速度
GF 加速操作時の加速度
GN 中立位置での減速度
L 中立制動停止距離
MM 車両
T 中立停止時間
V 車速
VTH 車速閾値
【技術分野】
【0001】
本発明は、運転者の加減速操作に応じて目標加速度若しくは目標減速度を求め、その目標加速度若しくは目標減速度となるように、車両の加減速度を制御する技術に関する。
【背景技術】
【0002】
走行制御装置としては例えば特許文献1に記載の技術がある。この技術では、2方向に操作可能なレバーが、ステアリングホイールに設けられている。上記レバーに操作力が付加されない無操作状態では、上記レバーは、ばねに付勢されることで中立位置に戻る。
そして、運転者がレバーを中立位置から一方の方向に操作することで加速操作となり、また、中立位置から他方の方向に操作することで減速操作となる。その加速操作及び減速操作による加速および減速は、それぞれアクセル系統およびブレーキ系統に設けられたモータなどのアクチュエータを駆動することによって行われる。ここで、上記従来技術では、レバーに操作力が付加されずにレバーが中立位置に位置する状態となっているときには、上記加速・減速に関わるアクチュエータを駆動しない。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特許第4400616号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記従来技術では、運転者が加減速操作を行うレバーが中立位置に戻っている場合は、制動装置による制動が車両に付加されていない。
ここで、エンジンで走行し且つ自動変速機を備える車両等の車両にあっては、クリープ現象によって、加速操作を行わない場合(レバー操作を行わない場合を含む。)、平坦路では特定の車速(以降クリープ車速と言う。一般に5〜10km/h程度である。)で一定速になる。このため、上記従来技術を備えた車両においては、レバーが操作されていないで中立位置になっている場合、車速がクリープ車速より高いときには車両はエンジンブレーキによって減速していくが、クリープ車速に到達すると車両は減速しなくなり、クリープ車速によって一定速になってしまう。
【0005】
このため、例えば渋滞走行等で、運転者が車両を頻繁に止めようとする場合には、レバーから手を離しただけでは、クリープ車速で一定速になってしまうため、運転者による車両を止めようとする意思が反映されずに、運転者によるレバー操作が必要になる。このことは、運転者にとって、加減速操作に対する負荷の増加となるおそれがある。
本発明は、上記のような点に着目してなされもので、運転者の操作や運転負荷を低減することを目的とする。
【課題を解決するための手段】
【0006】
上記課題を解決するために、本発明は、車両の中立位置に対し異なる2方向へ運転者が加減速操作する操作体が中立位置から異なる2方向のいずれか一方に操作されたことを検出すると、車両に加速度若しくは減速度を付与すると共に、上記操作体を中立位置に付勢して無操作状態では上記操作体を中立位置に保持する保持機構を備える。そして、本発明は、上記操作体が中立位置にあることを検出すると、車両を停止可能な減速度を車両に付与する。
【発明の効果】
【0007】
本発明によれば、加減速指示するための運転者操作が無い状態においては、車両に停止可能な減速度を付与する。このため、発進と停止を繰り返すような渋滞走行等の走行状態にあっては、加速操作して発進後に、操作体を運転者が離したとき、車両は、停止に至るまで減速し続ける。このように、渋滞走行等の走行状態において、運転者は減速操作のために操作体に力を付加しなくても車両を停止させることが可能となる。
また、クリープ現象が発生する車両において、操作体を無操作状態としても、所定の車速(クリープ車速)で減速しなくなってしまうことがなくなり、車両の動きを一貫性をもって把握できるようになる。
以上のように、本発明によれば、運転者の操作・運転負荷を低減可能となる。
【図面の簡単な説明】
【0008】
【図1】本発明に基づく実施形態に係る車両の概要構成図である。
【図2】加減速度入力装置を説明する模式図であって、(a)は上面図、(b)は側面図である。
【図3】本発明に基づく実施形態に係る車両用走行制御装置の構成を示すシステム構成図である。
【図4】加減速度演算部210の処理を説明するフローチャートである。
【図5】発進停止を繰り返す渋滞を走行する場合の、加減速度演算部210の処理によって得られる車両の動作の例を説明するタイムチャートである。
【図6】中立位置から減速操作への切り替わり時に、目標加減速度を連続的に変化させたときの動作の例を説明するタイムチャートである。
【図7】中立位置から加速操作への切り替わり時に、目標加減速度を0から連続的に変化させたときの動作の例を説明するタイムチャートである。
【図8】所定距離以内に停止可能な減速度を求める際の図であって、(a)は車速に対する所定距離の関係性を示す特性図、(b)は図2のステップ2105に替わる処理を示すフローチャートである。
【図9】所定時間以内に停止可能な減速度を求める際の図であって、(a)は車速に対する所定時間の関係性を示す特性図、(b)は図2のステップ2105に替わる処理を示すフローチャートである。
【図10】別例の減速度を説明する図であって、(a)は車速の増加に対して単調に減少する減速度を説明する図、(b)は車速が閾値以下である場合は車速の増加に対して単調に増加し閾値以上では車速の増加に対して単調に減少する減速度を説明する特性図、(c)はその際に図2のステップ2105に替わる処理を示すフローチャートである。
【発明を実施するための形態】
【0009】
次に、本発明の実施形態について図面を参照して説明する。
先に加減速に関する用語について説明する。
以下の説明および図面においては、GF、GN、GBという記号を用いて説明を行う。GFは加速方向の加速度、GN、GBは、減速方向の加速度を示し、GN、GBという記号は車速が減速する際の単位時間当たりの変化率を正の値で表現するものとする。つまり、「GF=0.5m/s2」は加速することを意味する。また、「GN=0.5m/s2」、「GB=0.5m/s2」と表現した場合は、0.5m/s2で減速することを意味する。ただし、単にGと表現した場合は、一般の加速度を示す。つまり、減速する場合はマイナスの値、プラスの値とした場合は加速することを意味する。また、以降の説明では、減速方向の加速度を説明する場合には、「減速度」という言葉を用いて説明する。
【0010】
(構成)
車両MMには、図1及び図3に示すように、車両用走行制御装置の構成として、加減速入力装置100、車速計測装置50、制御ユニット20、ブレーキアクチュエータ30、アクセルアクチュエータ40が搭載されている。
加減速入力装置100は、運転者が加速及び減速指示のために加減速操作を手動で行う操作体を備える。本実施形態の加減速入力装置100の操作体は、図2に示すように、レバー100Aから構成され、そのレバー100Aは、ステアリングホイールやシフトレバーなどの手動で操作可能な運転席近傍の操作部に設けられている。上記レバー100Aは、予め設定した中立位置Nに対し異なる2方向に移動可能つまり運転者が操作可能となっている。異なる2方向として、本実施形態では180度向きが反対方向を例に挙げる。異なる2方向の向きの中立位置での交角は、180度でなくても良い。また、加減速操作の軌道も必ずしも直線状でなくても良い。又、必ずしも手動に限らずアクセルペダルを操作体として同様な機能をもつ構造にしてもよい。
【0011】
また、上記レバー100Aは、バネなどの弾性部材からなる保持機構100Bを備え、その保持機構100Bによって中立位置に向けて付勢されている。このため、レバー100Aは、操作力が付加されていない無操作状態では、中立位置へ自動的に戻って当該中立位置に保持された状態となる。
ここで、上記異なる2方向のうち、中立位置から1方向への操作を加速操作(図2F方向)、他方向への操作を減速操作(図2のB方向)と記載する。
【0012】
また、加減速入力装置100はレバー位置検出部100Cを備える。レバー位置検出部100Cは上記レバー100Aの位置を検出する。レバー位置検出部100Cが検出した位置情報は、レバー100Aが中立位置、加速操作側若しくは減速操作側に位置するのかの判定や、中立位置からの操作量を検出するために使用される。上記レバー位置検出部100Cは、例えば可変抵抗器で構成する。この場合には、操作レバー100Aの移動に伴って摺動子100Caが移動し、その移動する摺動子100Caが抵抗体100Cb上を摺動する構成とする。そして上記摺動子100Caの位置に応じた、摺動子100Caと抵抗体100Cbとの間の電圧値や抵抗値等を、中立位置からの操作量及び操作方向に応じた操作位置情報として出力する。レバー位置検出部100Cは、上記検出する操作位置情報を制御ユニット20に出力する。
【0013】
車速計測装置50は、車速を計測する装置である。本実施形態の車速計測装置50は、車輪速センサから構成される。車輪速センサは、車両MMの車輪5近傍に設けられ、車輪5の回転に応じてパルス信号を車速情報として出力し、その出力は制御ユニット20に入力される。
制動手段としてのブレーキアクチュエータ30は、電動式制動ユニットや油圧式制動ユニット等の制動ユニット3で発生する制動力を制御する制動制御部である。本実施形態では、制動ユニット3として油圧式制動ユニットを例にして説明する。本実施形態のブレーキアクチュエータ30は、制御用負圧ブースターから構成されて、制御ユニット20からブレーキの目標ホイルシリンダ圧を指令値として入力し、入力した目標ホイルシリンダ圧となるように制動ユニット3のホイルシリンダ圧を制御する。
【0014】
アクセルアクチュエータ40は、車両MMを駆動装置の駆動力を調整する駆動力調整装置である。本実施形態では、駆動装置としてエンジン4を例にして説明する。本実施形態のアクセルアクチュエータ40は、制御ユニット20から入力する加速指令値としてのスロットル開度(例えば電気信号として入力する。)に基づき、エンジン4に供給する燃料量の調整弁の開度を制御する電子制御スロットルである。
【0015】
制御ユニット20は、加減速入力装置100と車速計測装置50の出力を入力し、ブレーキアクチュエータ30とアクセルアクチュエータ40とに指令値を出力する機能を持つ、マイクロコンピュータおよびその周辺回路を備えるコントローラである。この制御ユニット20を構成するマイクロコンピュータと周辺回路は、図3に示すように、少なくとも操作状態判定部201、車速計算部202、加減速度演算部210、アクチュエータ駆動信号演算部220を有する構成となっている。
【0016】
上記操作状態判定部201は、加減速入力装置100が出力した電圧値(操作位置情報)を取得し、取得した電圧値をアナログ・デジタル変換する。そして、操作状態判定部201は、変換後の電圧値に基づき、加減速入力装置100が中立位置であるか、加速側に操作されているか、減速側に操作されているかを判定し、その操作状態の判定結果を加減速度演算部210へ出力する。
【0017】
本実施形態の操作状態判定部201では、具体的には、中立位置における電圧値を予め取得して基準電圧値とする。そして、「基準電圧値>取得した電圧値」ならば加速操作、「基準電圧値<取得した電圧値」ならば減速操作、「基準電圧値=取得した電圧値」ならば中立位置と判定する。また、基準電圧値と取得した電圧値との電圧差に基づき操作量を検出すればよい。
【0018】
車速計算部202は、車速計測装置50から車輪5の回転に応じたパルス波を入力して、その入力したパルス波に基づき、1周期に掛かる時間と車輪5の半径とから車速を計算する。そして、その計算した車速を加減速度演算部210に出力する。
加減速度演算部210の処理については後述する。
アクチュエータ駆動信号演算部220は、加減速度演算部210から目標加減速度(目標加速度及び目標減速度)を入力し、目標加減速度を実現可能なブレーキのホイルシリンダ圧の指令値、および、スロットル開度指令値を演算する。
【0019】
ここで、スロットル開度と、そのスロットル開度による車両MMが実際に発生する加速度との関係は強い非線形性を有する。このため、このアクチュエータ駆動信号演算部220では、例えばスロットル開度、現在の車速と発生加速度の関係性を記述した3次元マップや関数等を使用して、目標加速度(あるいは車両質量との関係で求められる目標駆動力)をスロットル開度指令に換算を行う。この制御は複雑であるが、エンジン制御では極一般的に行われる制御である。このため、本実施形態ではその制御の詳細説明を省略する。ブレーキ制御についても、同じように目標減速度からホイルシリンダ液圧へと変換する制御方法について各種の方法が公知として存在する。このため、説明を省略する。
【0020】
上記加減速度演算部210は、操作状態判定部201の判定結果に基づき、加減速入力装置100のレバー100A(操作体)が中立位置にある場合には、車両MMが停止可能な減速度を目標減速度として、アクチュエータ駆動信号演算部220に出力する。上記車両MMが停止可能な減速度は、実験などによって予め定めた規定の減速度である。
【0021】
また加減速度演算部210は、操作状態判定部201の判定結果に基づき、加減速入力装置100のレバー100Aが加速側に操作されている場合には、あらかじめ定めた規定の目標加速度、若しくは加速側への操作量に応じた目標加速度を演算する。また、加減速度演算部210は、加減速入力装置100のレバー100Aが減速側に操作されていると判定された場合には、あらかじめ定めた規定の減速度を目標減速度、若しくは減速側への操作量に応じた目標減速度を演算する。そして、加減速度演算部210は、演算した目標加速度若しくは目標減速度を目標加減速度としてアクチュエータ駆動信号演算部220へ出力する。
【0022】
次に、上記加減速度演算部210の処理の一例を、図4に示すフローチャートを参照して説明する。なお、各処理は、所定のタイミング信号(マイコンのクロック信号から生成される)に同期して、予め設定した制御周期で処理を実行する。
まず加減速度演算部210は、ステップS2101にて、車速計算部202で計算された車速Vを取得する。
【0023】
次に、ステップS2102にて、操作状態判定部201から入力された、加減速入力装置100のレバー100Aが中立位置であるか、加速側に操作されているか、減速側に操作されているかの判定結果に基づき、処理分岐の判断を行う。すなわち、ステップS2102では、中立位置にある場合にはステップS2105の処理に移行し、加速側に操作されている場合はステップS2104の処理に移行し、減速側に操作されている場合はステップS2106の処理に移行する。
【0024】
ステップS2105では、中立位置での減速度GNを設定する。その後ステップS2107に移行する。上記中立位置での減速度GNは、例えば、GN=0.05G(≒0.5m/s2)とするなど、減速度GNを一定値に設定するのが最も簡易な方法である。各減速度の大きさについては、実験的に定めるなどの方法を取ればよい。なお、ステップS2105では、GF、GBをゼロクリアする。
【0025】
ステップS2104では、加速操作時の加速度GFを一定値として設定する。その後ステップS2107に移行する。例えば、GF=0.05G(≒0.5m/s2)とする。なお、ステップS2104では、GN、GBをゼロクリアする。
ステップS2106では、減速操作時の減速度GBを一定値として設定する。その後ステップS2107に移行する。例えば、GB=0.1G(≒1.0m/s2)としてGBを一定値に設定する。なお、ステップS2106では、GF、GNをゼロクリアする。
【0026】
ここで、上記減速操作時の減速度GBは、常に中立位置での減速度GN以上に設定する。すなわち、無操作状態である中立位置での減速度GNが、常に減速操作時の減速度GB以下となるように設定する。本実施形態では、GB>GNに設定している。なお、減速操作時の減速度GBは、上記範囲を保った上で、官能評価により設定することが可能である。また、減速操作時の減速度GBを操作量に応じた可変値に設定する場合であっても、その最低値を減速度GN以上に設定する。
【0027】
ステップS2107では、前述の処理で演算した中立位置での減速度GN、および、加速操作時の加速度GF、および減速操作時の減速度GBに基づいて、目標加減速度Gを演算する。具体的には、下記式に基づき目標加減速度Gを演算する。その後、次の制御周期において、上記ステップS2101の処理に移行する。目標加減速度Gは、正の値であれば目標加速度に対応し、負の値であれば目標減速度に対応する。
G=GF−GN−GB
加減速度演算部210は、以上の処理によってアクチュエータ駆動信号演算部220に出力する目標加減速度の演算処理を実施する。
【0028】
(動作その他)
上記加減速入力装置100のレバー100Aの操作状態に応じて、上記処理によって得られる車両MMの動作の一例を図5に示す。この図5は、車両MMが発進・停止を繰り返す、渋滞した環境で走行する場合を想定した時系列での車両状態を示すタイムチャートの図である。
ここで図5中、上段は、レバー100Aの操作状態を表し、レバー100Aの操作結果を操作状態判定部201で判定した後の結果を示している。このため、レバー100Aの状態は、加速、減速、中立の3パターンで表している。図5の中段は、加減速度演算部210で演算された目標加減速度Gの状態を表している。先に説明したように、本実施形態では、加速側、減速側、中立時のそれぞれが一定の加速度、減速度(GB,GN,GF)を発生するように設定している。さらに、図5の下段は、上記目標加減速度に応じて生じた車速の変化を示している。
【0029】
次に、図5を参照しつつレバー100Aの操作に伴う車両動作の例について説明する。
まず、時刻0〜時刻t1の間において、車両MMは停止(車速=0km/h)しており、操作状態は中立位置となっている。この場合、操作状態判定部201では操作状態を中立位置と判定しているため、加減速度演算部210では目標加減速度Gを中立位置での減速度GNに基づき、G=−GNと演算している。この結果、ブレーキアクチュエータ30には、目標減速度がGNに対応するホイルシリンダ圧指令が送信し続けられるため、車両MMは停止し続ける。
【0030】
その後、渋滞路において先行車両が発進したとする。それに応じて、運転者が、時刻t1において、加減速入力装置100のレバー100Aを中立位置から加速側に操作を開始したとする。この場合、加減速度演算部210で演算される目標加減速度Gは、加速操作時の加速度GFとなり、車両MMは加速する。その後、時刻t2まで加速操作を継続して、車速V2に到達する。本実施形態では、GFが一定であるため、単純に下記式でV2を求めることが出来る。
V2=GF×(t2−t1)
【0031】
次いで、先行する車両MMが再び停止しようと減速したとする。そして、運転者が、時刻t2において、加減速入力装置100のレバー100Aを加速側に操作することを止めて加速操作を止めると(レバー100Aから手を離すと)、加減速入力装置100のレバー100Aは、保持機構100Bによって中立位置に自動的に戻る。この結果、加減速度演算部210で演算される目標加減速度Gは、中立位置での減速度GNに基づき、G=−GNとなり、車両MMは減速を開始する。
【0032】
本実施形態の車両用走行制御装置では、エンジン4のクリープ力のあるなしにかかわらず、レバー中立位置の状態にしておくことで、車両MMが停止するまで更には車両MMが停止した後も、減速度を発生し続ける。このため、車両MMは減速を継続し、時刻t3の時点で停止する。その後は、時刻0における車両MMの状態と同様に、加減速度演算部210から目標減速度(G=−GN)が出力され続ける。この結果、ブレーキアクチュエータ30には、GNに応じたホイルシリンダ圧指令が送信し続けられることで、車両MMは停止し続ける。
【0033】
以上の動作で示したように、中立位置での目標減速度GNは、車両MMが停止可能な減速度である。このため、発進と停止を繰り返す渋滞した環境を走行する場合においては、発進後に再び車両停止する際において、運転者は減速のために加減速入力装置100のレバー100Aに操作力を付加しなくとも車両MMを停止させることが可能になる。これによって、運転者の加減速操作のための操作負荷が低減される。
【0034】
また、上記ステップS2105で設定する中立位置での減速度GNは、加減速入力装置100のレバー100Aが減速側に操作されたときに発生させる減速度GB(ステップS2106で設定する。)より小さい値となるよう設定している。つまり、例えば、先に図4のフローチャートで示したように減速度GN及びGBをともに固定に設定する例であれば、中立位置での減速度GNは、減速側の減速度GBより小さい値とする。
【0035】
この動作について、再び図5を用いて説明する。
運転者が、時刻t4において再び加減速入力装置100のレバー100Aを中立位置から加速側に操作を開始し、更に時刻t5において運転者がレバー100Aの操作を止めると(レバー100Aから手を離すと)、時刻t5から、上述と同様に車両MMは減速度G=−GNにて減速を開始する。
【0036】
このとき、減速開始から車両MMがまだ停止していない時刻t6において、運転者が加減速入力装置100のレバー100Aを中立位置から減速側に操作を開始すると、加減速度演算部210で演算される目標加減速度Gは、減速操作時の減速度GBに基づき、G=−GBとなり、つまりステップ状の目標減速度が増加して車両MMは減速度GBにて減速する。そしてその後、時刻t7にて車両MMは停止する。時刻t8にて減速操作を止めたとしても、つまり運転者がレバー100Aから手を離したとしても、時刻0の状態と同様、車両MMは停止し続ける。
【0037】
ここで、時刻t5〜t6までの車速変化の傾き(すなわち減速度)は、時刻t6〜t7までの車速変化の傾きよりも緩やかになっている。すなわち、中立位置にて発生する減速度GNは、減速操作時に発生する減速度GBよりも小さい。したがって、運転者がレバー100Aが中立位置での減速度よりもっと大きな減速としたいときに、減速の調整が可能となるため、運転者は、自らの意思を反映しやすくなる。この結果、減速度の調整を容易に行うことができる。
【0038】
ここで、本実施形態では、時刻t6においてGB>GNとなるように、ステップ状に、つまり不連続に減速度が変化する例を示している。ただし、GB≧GNを満足すれば、例えば図4に示すパターンで変化しても良い。すなわち、中立位置の減速度GNから減速操作時の減速度GBに切り換える際に、予め設定した勾配をもって目標減速度Gを徐々に変化させるようにしても良い。つまり、図6に示す時刻t6〜t7の別パターンでは、図6のA部分において、減速度の切り替わり時に、目標加減速度Gが−GNから−GBとなるまで連続的に変化するように(急峻に変化しないように)、過渡的な減速度変化率にリミッターを設けた例を示している。これにより、運転者の減速意図を反映しつつ、発生する車速変化を滑らかにすることができて、乗心地がよくなる効果も得られる。
【0039】
また、加速操作時の加速度GFは、中立位置での減速度GNの設定値に関係なく、加速側の0以上の値としている。このため、例えば、図5の時刻t1において、目標加減速度Gが、負の値−GNの状態から、加速操作を検出すると不連続に正の値GFに変化することに対応する。
図7は、上記加速操作時の減速度の別の設定例、及びそのときの動作例を示す図である。
図7に示す例では、発進直後の車速変化の滑らかさを求めて、目標加減速度Gの変化率に制限を掛けた例である。このようにする場合にあっても、目標加減速度Gの始点は0以下にならないようにする(図7のAを参照)。
【0040】
また、本実施形態では、レバー100Aの無操作時、すなわち中立位置の状態では減速度GNが発生する構成としている。運転者が中立位置のレバー100Aを加速側に操作した場合には、運転者が加速したいという意思表示をしたと考えられるが、このとき本実施形態では、無操作時と加速操作との間の加速度を敢えて不連続としたことにより、運転者の加速操作開始に対し速やかに加速が開始されるようになる。
【0041】
なお、減速側から加速側まで加速度の変化を連続となるように設定すると、加速側にレバー100Aを操作しても、車両MMに加速しない領域ができてしまうが、本実施形態では、そのような問題を回避出来る。
以上の説明では、加減速度演算部210に実装する加速操作、減速操作、中立位置における目標加減速度をそれぞれ予め定めた一定値(GF,GN,GB)である例を示してきた。しかしながら、この目標加減速度は一定値である必要はない。
【0042】
ここで レバー100Aは操作体を構成する。操作状態判定部201及び加減速度演算部210、ステップS2101〜S2107は、加減速度演算手段を構成する。後述のステップS21052又はステップS21053は、停止可能減速度算出手段を構成する。ブレーキアクチュエータ30は制動手段を構成する。
【0043】
(本実施形態の効果)
(1)レバー100A(操作体)は、車両の運転者が加速及び減速指示のために中立位置に対し異なる2方向へ操作可能に構成される。保持機構100Bは、上記操作体を中立位置に付勢して無操作状態では当該操作体を中立位置に保持する機構である。加減速度演算手段は、上記操作体の中立位置から上記2方向のうちの一方向への操作を加速操作として検出し、上記操作体の中立位置から上記2方向のうちの他方向への操作を減速操作として検出して、検出した加速操作若しくは減速操作に応じた目標加速度若しくは目標減速度を演算し、上記操作体が中立位置にあると判定すると、車両を停止可能な大きさの目標減速度を演算する。制動手段は、上記加減速度演算手段が演算した目標減速度に基づいて、車両を制動させる。
【0044】
運転者がレバー100A(操作体)を操作していないことで、レバー100Aが中立位置にある場合には、車両MMを停止可能な減速度を発生させる。
このため、例えば、発進と停止を繰り返すような渋滞走行を想定した場合、レバー100Aを加速方向に操作して発進し、その後レバー100Aを離したとき、車両MMは、停止に至るまで減速し続ける。これによって、運転者は減速のためにレバー100Aに力を付加しなくとも車両MMを停止させることが可能になる。
また、クリープ車速を発生する車両MMであっても、ある車速(クリープ車速)で、減速しなくなってしまうことがなくなり、車両MMの動きを一貫性をもって把握できる。
この結果、運転者による加減速指示の操作や運転負荷が低減する。
【0045】
(2)上記操作体が中立位置にあると判定したときの目標減速度は、上記減速操作に応じた目標減速度の最小値以下である。
運転者がレバー100Aを操作して明示的に減速操作を行ったときの減速度GBを、レバー中立位置すなわち運転者が何も操作していないときに発生する減速度GN以上になるようにした。このため、レバー中立位置で発生する減速度GNでは減速度が足りないと運転者が感じたときには、自らの意思によって減速度を増加させるレバー100Aの操作をすることができるようになる。これにより、車両MMの減速度を調整することが可能となり、運転者の減速度の微調整が容易になる。
【0046】
(3)上記加速操作に応じた目標加速度の最小値は、加速側のゼロ以上の大きさの値である。
運転者が中立位置からレバー100Aを加速側に操作した際には、運転者が加速したいという意思表示をしたと考えられる。これに鑑み、レバー100A無操作時には、負の加速度である減速度が発生する構成としている。そして、加速操作時の目標加速度を加速側のゼロ以上の大きさにして、無操作時と加速操作の間の加減速度を敢えて不連続としている。
【0047】
この構成によって、運転者が中立位置からレバー100Aを加速側に操作すると、運転者の加速操作に応じて速やかに加速が開始されるようになる。
なお、加減速度を減速側〜加速側まで連続となるように設定すると、加速側にレバー100Aを操作しても加速しない領域ができてしまうが、本実施形態では、この問題が無くなる。
【0048】
(変形例)
(1)制御ユニット20が、車両状態に応じて、予め設定した停止距離である中立制動停止距離内で車両MMを停止可能な減速度を求める停止可能減速度算出部を備える。そして、上記停止可能減速度算出部が求めた減速度を、上記操作体が中立位置にあると判定したときの目標減速度とするようにしてもよい。
この場合には、発進と停止を繰り返すような渋滞を走行する場合において、運転者が操作レバー100Aを操作しない際にどの程度の距離で停止するのかを想定しやすくなる。従って、例えば前走車が停止した場合などに、自車が停止位置にどの程度まで近付いたらレバー100Aを中立位置に戻せば良いかを理解しやすくなる。これによって、運転者の運転負荷が低減される。
【0049】
すなわち、上述した実施形態では、上記ステップS2105で設定する、中立位置での減速度GNを一定値として設定した。この中立位置での減速度GNは、車両MMの状態に基づき、予め設定した距離である中立制動停止距離以内で停止可能な減速度としてもよい。例えば、車速に基づき、中立制動停止距離以内で停止可能な減速度を演算し、その演算した減速度を中立位置での減速度GNとする。
【0050】
具体的には、上記ステップS2105の代わりに図8(b)で示すステップS21052を使用し、下記式によって減速度GNを演算する。ここで、中立制動停止距離をLとし、上記ステップS21012で取得した車速Vとする。このステップS2105は、停止可能減速度算出部を構成する。
GN=0.5×V2÷L
【0051】
ここで、中立制動停止距離Lは、あらかじめ実験的に求めておく。例えば、図8(a)に示すように、車速Vに対する停止可能な中立制動停止距離Lの関係性を定め、加減速度演算部210のプログラムに反映させておくのが良い。中立制動停止距離Lは、比較的車速が低い領域で一定値を保つ範囲に設定しておくことが効果的である。これにより、中立制動停止距離Lが一定値を保つ範囲内の車速であれば、車速Vの値が異なっていても、レバー100Aを中立位置にしてから車両MMが停止するまでの車両MMの移動距離を常に一定とすることが可能となる。
【0052】
このようにすると、レバー100Aの操作を止めてから車両MMが停止するまでの距離に着目して運転するシーンにおいて、上記車両用走行制御装置は利用しやすいという効果が発生する。例えば、発進と停止を繰り返す渋滞シーンにおいて発進後に再び車両MMを停止するときに、運転者は、停止するまでの距離を想定することが可能となり、停止させる位置どの程度近づいたら、または先行車に対する距離がどの程度になったら、操作レバー100Aを中立位置に戻せば良いかが理解しやすくなる。これによって、運転者の操作負荷が低減される。
【0053】
(2)制御ユニット20が、車両状態に応じて、予め設定した時間内で車両MMを停止可能な減速度を求める停止可能減速度算出部を備え、上記停止可能減速度算出部が求めた減速度を、上記操作体が中立位置にあると判定したときの目標減速度とするようにしてもよい。
この場合には、停止するまでの時間を想定して、レバー100Aを中立位置に戻すことが可能となり、発進と停止を繰り返す渋滞シーンにおいて発進後に再び車両停止するときに、運転者は、停止するまでの時間を想定して操作レバー100Aを中立位置に戻すことが可能となるので、運転者の操作負荷が低減される。
【0054】
すなわち、中立位置での減速度GNを、車両状態に基づき、中立位置になった時点から予め設定した所定時間である中立停止時間以内に停止可能な減速度に設定しても良い。例えば、車速に基づき、中立停止時間以内に停止可能な減速度を演算し、その演算した減速度を中立位置での減速度GNとする。
具体的には、上記ステップS2105の代わりに図9(b)で示すステップS21053を使用し、下記式によって減速度GNを演算する。ここで、中立停止時間をTとし、上記ステップS2101で取得した車速Vとする。このステップS2105は、停止可能減速度算出部を構成する。
GN=V÷T
【0055】
ここで、中立停止時間Tは、あらかじめ実験的に決定しておき、例えば、図9(a)に示すように、車速Vに対する停止可能な中立停止時間Tの関係性を定め、加減速度演算部210のプログラムに反映させておくのが良い。中立停止時間Tは、比較的車速が低い領域で一定値を保つ構成としておくのが効果的である。
例えば、車速20km/h以下の領域で、中立停止時間T=3秒と設定しているとする。中立位置になったときの車速Vが10km/hであれば減速度GNは、約0.93m/s2と計算される。また、車速Vが20km/hであれば減速度GNは、約1.85m/s2と計算される。
【0056】
このようにGNを設定することで、車速20km/h以下であれば、車速Vが異なっていても、中立位置にした時点から停止するまでの時間を常に一定とすることが可能となる。このようにすると、停止するまでの時間を重要視したいシーンでは利用しやすいという効果が発生する。例えば、信号器に信号切り替わりまでの時間が表示されているような場面では、時間とタイミングを合わせてレバー100Aを中立位置に戻すことで、目的とする停止位置でちょうど停止するような減速度を発生することができる。このことは、レバー100Aの操作1回だけで、最後に微調整することなく停止する効果につながる。
【0057】
(3)上記操作体が中立位置にあると判定したときの目標減速度は、車速が小さい場合に比べて、車速が大きい場合の方が小さいように設定しても良い。例えば、車速の増加に伴い単調に減少するように設定する。
一般の交通環境を考えた場合、渋滞路のような周辺の車両MMまで含めた車速が低い場面においては、頻繁に停止することから、比較的大きな減速度が必要なシーンが多い。
【0058】
逆に渋滞路を抜けて、交通流がスムーズになってくると、車速が上昇して車速の変動がそれほど大きくなくなる。このように交通の流れに乗って走るのに必要な減速度は、小さいことが多くなってくる。
これに対し、変形例(3)のように設定すると、運転者が操作レバー100Aによって予め設定した車速まで到達して、レバー100Aを離した際の減速度が、上記のような一般的な交通環境にマッチした減速度となる。このため、運転者が明示的に減速操作を行わなくても交通の流れに乗って走ることができる領域が拡大し、結果として運転者の操作負荷が減少する。
【0059】
すなわち、上記ステップS2105に代わりに図10(c)に示すステップS21054で処理を行い、そのテップS21054の処理で設定される、中立位置での減速度GNは、図10(a)に示すように、車速の増加に伴い単調に減少する特性に基づいて設定しても良い。
例えば、上記ステップS2105において、予め設定した減速度マップに基づき、上記ステップS2101で取得した車速Vに基づいて、減速度GNを演算する。
【0060】
上記予め設定した減速度マップは、例えば、
車速V=0km/h時 : 減速度GN=1.5m/s2
車速V=10km/h時 : 減速度GN=1.2m/s2
車速V=20km/h時 : 減速度GN=0.7m/s2
車速V=30km/h時 : 減速度GN=0.5m/s2
というように、車速に対する減速度のマップを予め設定しておく。
この場合には、車速が高ければ高いほど、比較的小さな減速度が発生し、また、車速が低ければ低いほど比較的大きな減速度が発生する。
一般の交通環境を考えた場合、渋滞路のような周辺の車両MMまで含めた車速が低い場面においては、頻繁に停止する。従って、このような場面では、比較的大きな減速度が必要なシーンが多い。
【0061】
逆に渋滞路を抜けて、交通流がスムーズになってくると、車速が高くなると共に交通の流れに乗って走るようになる。この場合には、車速の変動がそれほど大きくなく、交通の流れに乗って走るのに必要な減速度は小さいことが多くなってくる。そしてこの変形例では、運転者のレバー100Aの操作によって車両MMがある車速まで到達してから、レバー100Aを離した際の減速度が、上記のような一般的な交通環境にマッチした減速度となるため、運転者が明示的に減速操作を行わなくても交通の流れに乗って走ることができる領域が拡大する。この結果として、運転者の操作負荷が減少する。
【0062】
(4)さらに、上記操作体が中立位置にあると判定したときの目標減速度は、車速が予め設定した閾値以下では車速の増加に伴い増加し、車速が予め設定した閾値を越えると車速の増加に伴い減少するようにしても良い。たとえば、上側に凸の1個の極大値を持つ曲線で減速度を規定する。
変形例(3)の構成に加えて、さらに車両MMの停止間際には減速度を小さくすることで、停止間際の車両MMの挙動を小さくすることが可能となる。これによって、いわゆる、かっくんブレーキが防止できるので、運転者の乗り心地悪化を防止することができる。
【0063】
すなわち、中立位置の減速度GNは、車速に基づき図10(b)のように設定しても良い。
図10(b)に示すように、予め車速閾値VTHを設け、車速が閾値VTHより小さい領域では、減速度GNを車速の増加に伴い単調に増加するように演算し、車速が閾値VTHより大きい領域では、減速度GNを車速の増加に伴い単調に減少するように演算する。
【0064】
なお、上記車速閾値VTHは、例えば、5km/hなど、通常運転時における停止間際の車速に設定すればよい。または、車両MMの停止間際の速度においてブレーキシューとブレーキディスクの摩擦係数が変化する事が一般的に知られているため、この摩擦係数の変化する車速を実験的に求め、その車速を車速閾値VTHとして設定しても良い。
例えば、上記ステップS21054の処理で用いる、減速度の特性マップを以下のように替える。
【0065】
車速V=0km/h時 : 減速度GN=1.0m/s2
車速V=3km/h時 : 減速度GN=1.1m/s2
車速V=5km/h時 : 減速度GN=1.3m/s2
車速V=10km/h時 : 減速度GN=1.1m/s2
車速V=20km/h時 : 減速度GN=0.7m/s2
車速V=30km/h時 : 減速度GN=0.5m/s2
そして、上記ステップS2101で取得した車速Vに基づいて、減速度GNを演算する。
または、減速度の特性マップの代わりに、図10(b)のような形状特性を持つ極値を一つもち、ピークがVTHになるような連続的な関数を使用し、その関数に基づき減速度GNを求めても良い。
【0066】
この変形例では、「V>VTH」の範囲では、車速が高ければ高いほど、比較的小さな減速度が発生し、低ければ低いほど比較的大きな減速度が発生し、かつ、「V<VTH」における停止間際の車速の範囲では、比較的小さな減速度しか発生しない。
この場合には、車両MMの停止間際の車両MMの挙動を小さくすることが可能となるので、運転者の乗り心地悪化を防止することが可能となる。
【0067】
(5)次に、上記中立位置での減速度を、車速に応じて設定する別の例を説明する。以下の例では、減速度GNの設定を、足で操作するアクセル(加速操作子)とブレーキ(減速操作子)とを搭載した通常の車両MMを運転する複数の運転者の運転行動から収集したデータを統計処理し、その統計処理をした後のデータに基づいて設定する場合を例示する。
【0068】
「第1の別例」
第1の別例では、上記操作体が中立位置にあると判定したときの目標減速度は、予め設定した車速毎の減速度に基づき決定する。上記車速毎の減速度は、複数の運転者による各運転者毎の加減速操作と該加減速操作により車両MMに発生した加速・減速パターンのデータである収集データを、統計処理して抽出した値に基づき設定する。上記収集データは、加速操作用の操作体及び減速操作用の操作体を備え且つその2つの操作体が無操作の状態では目標減速度がゼロの車両MMを上記各運転者が運転して収集したデータである。
【0069】
この場合には、複数の運転者からデータを収集し、その収集したデータを統計処理することで抽出したデータに基づいて中立位置での減速度を設定しているので、中立位置での減速度を、多くの人の感覚にあう値に設定可能となる。
すなわち、収集データを、通常のアクセル(加速操作用の操作体)とブレーキ(減速操作用の操作体)を持つ車を使用し、通常の走行時における速度変化とアクセルおよびブレーキ操作を同期しながら時系列に収集する。このデータ収集を複数の運転者による各運転にてそれぞれ実施する。
【0070】
その収集したデータを統計処理して抽出したデータに基づいて減速度マップを作成する。減速度マップは、速度と減速度の関係を示し、例えば、次のような方法で作成する。この減速度マップを図10(c)で適用するマップとして使用すればよい。なお、「減速度マップ」が車速毎の減速度の情報となる。
すなわち、上記収集データを予め設定した所定の分解能の速度ごとに分割し、その分割した速度ごとに、統計処理を実施して、対応する速度における減速度の頻度を求める。
【0071】
対応する速度における減速度の頻度を求める一つの方法としては、例えば、分解能を2km/hとし、速度20km/h〜22km/hの間での減速度頻度を求める場合、運転者全員分の全走行区間のデータから、速度が、「速度20km/h〜22km/h」の間のときに観測された減速度を抽出し、ある減速度になる頻度をヒストグラムとして求めることで実施する。例えば、すべての運転者が全走行区間において「速度20km/h〜22km/h」の間で走行しているときの減速度が、90%は0.05m/s2、10%は0.06m/s2であるとする。この場合、ヒストグラムの分解能を0.01m/s2として設定すれば、0.05m/s2では90%の頻度(つまり、0.05m/s2±(0.01÷2)の区間の頻度)、0.06m/s2では10%の頻度(つまり、0.06m/s2±(0.01÷2)の区間の頻度)、他の減速度では、頻度が0%というヒストグラムができる。上記のような方法によって、2km/h間隔で全ての車速における減速度頻度ヒストグラムを作成する。
【0072】
次に、上記統計データに基づき中立時の減速度として活用する方法を説明する。
これは、例えば、各車速における最頻値を示した減速度をその車速における減速度として適用すればよい。先の例の場合、速度20km/h〜22km/hのときレバー100Aが中立であれば、0.05m/s2が最頻値であるので、この値を、速度20km/h〜22km/hの場合での減速度GNとする。このようにして減速度マップを作成し、予め記憶部に記憶しておく。
ここで、上記減速度マップは、例えば、車速毎の減速度としてマップとして保存してもよいし、ヒストグラムを滑らかに結ぶ曲線を当てはめてグラフや関数として保存してもよい。なお、実際に適用するときは、中立時における減速度を速度に応じた減速度として設定し減速させればよい。
【0073】
「第2の別例」
第2の別例では、上記車速毎の減速度は、上記収集データのうちの、加速操作用の操作体が加速操作状態から無操作となった瞬間または加速操作用の操作体が加速操作状態から無操作となった直後から予め設定した時間以内に車両MMに発生している減速度と、上記加速操作用の操作体が加速操作状態から無操作になった瞬間の車速とに基づき設定する。
この場合には、複数の運転者からデータを収集し、その収集したデータを統計処理することで抽出したデータに基づいて中立位置での減速度を設定している。このため、中立位置での減速度を、多くの人の感覚にあう値に設定可能となる。特に、無操作となったときのデータを使用することで、より中立位置での減速度を、多くの人の感覚にあう値に設定可能となる。
【0074】
次に、上記第1の別例で説明した収集データの統計データに基づく、速度に対する減速度マップの作成方法の第2の別例を説明する。速度に対する減速度マップが上記車速毎の減速度の情報となる。
第2の別例での減速度マップの作成方法を説明する。
ここでは、収集したデータの中から、アクセルから足を離した瞬間、つまりレバー100Aを中立にしたと同等の状態になった瞬間の減速度、または、その瞬間から予め設定した設定時間内での減速度とその変化を上記収集データから抽出する。つまり、このデータは、運転者が加速側に操作中の状態から、アクセルをオフしたあとの減速度の頻度を求める。すなわち、減速を始めたいときの減速度の頻度を求める。
【0075】
具体的な減速度マップの求め方は、例えば減速度マップの作成に使用する速度を、アクセルを離した瞬間の速度として、第1の別例と同様、予め設定した所定の速度ごとのヒストグラムとして求めればよい。また、ヒストグラムを作る際、減速度は、アクセルオフした瞬間(つまり0.1秒程度の非常に短い時間で見たときの)減速度としてもよいし、予め設定した所定の時間長さ(2〜3秒程度でもよいし10秒程度としてもよい)の範囲で起こる減速の平均値としてもよい。
【0076】
レバー100Aが加速操作状態から中立位置になった瞬間だけ、上記操作体が中立位置にあると判定したときの目標減速度として、上記第2の別例の適用して求めた車速毎の減速度(減速度マップ)を適用しても構わない。
すなわち、上記第2の別例で作成した、速度に対する減速度の集まりである減速度マップは、レバー100Aが加速側から離して中立にした瞬間だけに適用し、その後のレバー100A中立状態のときは、上述の減速度マップ(例えば第1の別例で説明した減速度マップ)を適用する、という方法で使用しても良い。
【0077】
このように、実際の走行パターンにおいて実際にアクセルから足を離した瞬間またはその後の減速の傾向を適用しているため、本実施形態のように加減速指示にレバー100Aを用いた場合におけるレバー100Aを中立位置にした瞬間の減速の度合いが、実際の運転フィーリングとより一層近いものとすることが可能となる。
【0078】
「第3の別例」
上記第1の別例で説明した収集データの統計データに基づく、速度に対する減速度マップの作成方法の第3の別例を説明する。
第3の別例では、加速操作用の操作体及び減速操作用の操作体を備え且つその2つの操作体が無操作の状態では目標減速度がゼロの車両MMを、複数の運転者がそれぞれ運転して収集したデータであって、車両MMに発生した速度変化の時系列データに基づき、車両MMに発生した速度変化のパターンを抽出する。そして、その抽出した速度変化のパターン毎にそのパターンに応じた減速度を求めて、その抽出した速度変化のパターンと対応する減速度をパターン参照データとして記憶しておく。そして、車両MMの速度変化のパターンと上記記憶している速度変化のパターンとが類似性が高いと判定すると、その類似性が高いと判定された上記記憶している速度変化のパターンに対応する減速度を、上記操作体が中立位置にあると判定したときの目標減速度に設定する。
【0079】
この場合には、複数の運転者からデータを収集し、その収集したデータを統計処理することで抽出したデータに基づいて中立位置での減速度を設定している。このため、中立位置での減速度を、多くの人の感覚にあう値に設定可能となる。特に時系列の速度変化パターンを利用することで、中立位置での減速度を、より多くの人の感覚にあう値に設定可能となる。
【0080】
上記第2の別例では、アクセル操作中からアクセルを離した瞬間をトリガとして、その瞬間からある所定時間内の減速度を抽出した。これに対し、第3の別例では、アクセルを離した瞬間だけではなく、予め設定した一定時間の速度変化パターンを抽出し、その速度変化と類似したパターンが観測された直後の減速度の統計データを抽出する。この抽出したデータの組がパターン参照データとなる。また、この抽出データは、第2の別例と同様に、ある速度およびその速度パターン観測ごとにおける減速度の頻度データとして減速度マップを作成する。
【0081】
ただし、第2の別例のヒストグラムは予め設定した分解能に区切った速度ごととしたが、速度だけでなく、この第3の別例での減速度マップは、速度パターンの変化ごとの減速度ヒストグラムとしてデータをマップ化する。
例えば、50km/h→51km/h→50km/h→51km/hのような速度変化が観測された場合、つまり、ある速度(この例では、50km/h)を中心に、同じ値となるよう振動しながらの速度調整がある場合、その直後の減速度は、減速度0.00001m/s2(つまりほとんど減速しない)になる頻度が高い、と統計データから抽出されたとする。その場合は実際の減速度マップは、「50km/h→51km/h→50km/h→51km/h」という速度変化に対し、減速度を0.00001m/s2と設定する。
【0082】
また、他にも、例えば、5km/h→4.8km/h→4.6km/h→4.4km/hと5km/h付近で単調減少するという速度変化において、統計データから、そのときは、減速度が0.01m/s2という値が高かったとする。その場合、同じように、「5km/h→4.8km/h→4.6km/h→4.4km/h」の場合は、減速度0.01m/s2と設定する。
【0083】
このような方法で、多くの統計データの中から頻繁に観測される速度変化のパターンを抽出し、その速度変化パターンの直後に頻度高く現れる減速度が存在する場合、速度変化に対する減速度マップとして設定する。
なお、実際の適用時は、「50km/h→51km/h→50km/h→51km/h」や「5km/h→4.8km/h→4.6km/h→4.4km/h」など、上記の減速度マップに存在する速度変化パターンと似た速度変化を観測した場合、上記のマップに登録されている減速度を適用するようにすればよい。
【0084】
なお、上記の減速度マップは、速度変化だけでなく、「0.02m/s2で加速、0.02m/s2で減速、0.02m/s2で加速」などの加速度の変化としてもよい。この場合は、適用する際も、マップの登録内容とあわせ、マップに登録されている加速、減速変化と類似した場合にこのマップに登録されている減速度を適用するようにすればよい。
ここで、速度変化や加速度変化パターンとの類似度は、時系列データを1次元的に並べた数値の相関を求めるなど、一般的な統計手法を適用すればよい。
【0085】
(6)制御ユニット20は、車両状態に応じて、中立制動停止距離内で車両MMを停止可能な減速度を求める上記停止可能減速度算出部を備える。そして、上記停止可能減速度算出部が求めた減速度を、上記操作体が中立位置にあると判定したときの目標減速度とする。このとき、上記中立制動停止距離は、複数の運転者による各運転者毎の加減速操作と該加減速操作により車両MMに発生した加速・減速パターンのデータである収集データを、統計処理して抽出した値に基づき設定する。上記収集データは、加速操作用の操作体及び減速操作用の操作体を備え且つその2つの操作体が無操作の状態では目標減速度がゼロの車両MMを上記各運転者が運転して収集したデータである。
【0086】
この場合には、複数の運転者からデータを収集し、その収集したデータを統計処理することで抽出したデータに基づいて中立制動停止距離を設定しているので、レバー100Aを中立位置にしてからの停止距離を、多くの人の感覚にあう値に設定可能となる。
すなわち、レバー100Aを中立位置にしたときに、減速度GNで停止するまでの距離である中立制動停止距離Lを、上記第1の別例で説明した収集データの統計データに基づいて求めもよい。
【0087】
この場合、抽出するデータは、ある速度から減速を始めて停止するまでの距離、もしくは、ある停止した時点からさかのぼって減速を始めたときの速度と、その瞬間から停止するまでに走行した距離などに基づき抽出する。
上記第1〜第3の別例では、収集データに基づき速度に対する減速度マップを求める。これに対し、この変形例では、速度に対する距離として求めるものである。
ある速度でアクセルをオフしてから停止するまでの距離がある値である頻度が高い場合、その距離を中立制動停止距離Lとして適用すればよい。
【0088】
また、この中立制動停止距離Lは、速度と距離だけではなく、第3の別例の方法を併用し、ある速度パターン観測時とその速度パターン観測から停止するまでの距離として統計データをまとめ、第3の別例の方法と同様、類似速度変化パターン観測時の減速度の計算に適用してもよい。これは、例えば、抽出するデータを「停止した時点からさかのぼって減速を始めたときの速度とその瞬間から停止するまでに走行した距離」とし、この停止した時点からある時間分だけさかのぼったときの速度変化を観測して、上記第3の別例と同様、ある速度変化パターンに対して非常に頻度の高い停止距離が存在する場合に適用するようしても良い。
【符号の説明】
【0089】
3 制動ユニット
4 エンジン
20 制御ユニット
201 操作状態判定部
202 車速計算部
210 加減速度演算部
220 アクチュエータ駆動信号演算部
30 ブレーキアクチュエータ
40 アクセルアクチュエータ
50 車速計測装置
100 加減速入力装置
100A レバー
100B 保持機構
100C レバー位置検出部
G 目標加減速度
GB 減速操作時の減速度
GF 加速操作時の加速度
GN 中立位置での減速度
L 中立制動停止距離
MM 車両
T 中立停止時間
V 車速
VTH 車速閾値
【特許請求の範囲】
【請求項1】
車両の運転者が加速及び減速指示のために中立位置に対し異なる2方向へ操作可能な操作体と、
上記操作体を中立位置に付勢して無操作状態では当該操作体を中立位置に保持する保持機構と、
上記操作体の中立位置から上記2方向のうちの一方向への操作を加速操作として検出し、上記操作体の中立位置から上記2方向のうちの他方向への操作を減速操作として検出して、検出した加速操作若しくは減速操作に応じた目標加速度若しくは目標減速度を演算し、上記操作体が中立位置にあると判定すると、車両を停止可能な大きさの目標減速度を演算する加減速度演算手段と、
上記加減速度演算手段が演算した目標減速度に基づいて、車両を制動させる制動手段とを備えることを特徴とする車両用走行制御装置。
【請求項2】
上記操作体が中立位置にあると判定したときの目標減速度は、上記減速操作に応じた目標減速度の最小値以下であることを特徴とする請求項1に記載した車両用走行制御装置。
【請求項3】
上記加速操作に応じた目標加速度の最小値は、加速側のゼロ以上の大きさの値であることを特徴とする請求項1又は請求項2に記載した車両用走行制御装置。
【請求項4】
更に車速検出手段とを備え
上記操作体が中立位置にあると判定したときの目標減速度は、車速が小さい場合に比べて、車速が大きい場合の方が小さいことを特徴とする請求項1〜請求項3のいずれか1項に記載した車両用走行制御装置。
【請求項5】
車速に応じて、予め設定した停止距離である中立制動停止距離内で車両を停止可能な減速度を求める停止可能減速度算出手段を備え、
上記停止可能減速度算出手段が求めた減速度を、上記操作体が中立位置にあると判定したときの目標減速度とすることを特徴とする請求項4に記載した車両用走行制御装置。
【請求項6】
車速に応じて、予め設定した時間内で車両を停止可能な減速度を求める停止可能減速度算出手段を備え、
上記停止可能減速度算出手段が求めた減速度を、上記操作体が中立位置にあると判定したときの目標減速度とすることを特徴とする請求項4に記載した車両用走行制御装置。
【請求項7】
上記操作体が中立位置にあると判定したときの目標減速度は、車速が予め設定した閾値以下では車速の増加に伴い増加し、車速が予め設定した閾値を越えると車速の増加に伴い減少することを特徴とする請求項4に記載した車両用走行制御装置。
【請求項8】
上記操作体が中立位置にあると判定したときの目標減速度は、予め設定した車速毎の減速度に基づき決定し、
上記車速毎の減速度は、複数の運転者による各運転者毎の加減速操作と該加減速操作により車両に発生した加速・減速パターンのデータである収集データを、統計処理して抽出した値に基づき設定し、
上記収集データは、加速操作用の操作体及び減速操作用の操作体を備え且つその2つの操作体が無操作の状態では目標減速度がゼロの車両を上記各運転者が運転して収集したデータであることを特徴とする請求項4に記載した車両用走行制御装置。
【請求項9】
上記車速毎の減速度は、上記収集データのうちの、加速操作用の操作体が加速操作状態から無操作となった瞬間または加速操作用の操作体が加速操作状態から無操作となった直後から予め設定した時間以内に車両に発生している減速度と、上記加速操作用の操作体が加速操作状態から無操作になった瞬間の車速とに基づき設定したことを特徴とする請求項8に記載した車両用走行制御装置。
【請求項10】
操作体が加速操作状態から中立位置になった瞬間だけ、上記操作体が中立位置にあると判定したときの目標減速度として、請求項9に記載の車速毎の減速度を適用することを特徴とする請求項9に記載した車両用走行制御装置。
【請求項11】
上記収集データは、車両に発生した速度変化の時系列データに基づき、車両に発生した速度変化のパターンを抽出すると共に、その抽出した速度変化のパターン毎にそのパターンに応じた減速度を求めて、その抽出した速度変化のパターンと対応する減速度をパターン参照データとして記憶しておき、
車両の速度変化のパターンと上記記憶している速度変化のパターンとが類似性が高いと判定すると、その類似性が高いと判定された上記記憶している速度変化のパターンに対応する減速度を、上記操作体が中立位置にあると判定したときの目標減速度に設定することを特徴とする請求項8に記載した車両用走行制御装置。
【請求項12】
車両の運転者が中立位置に対し異なる2方向へ加減速操作する操作体を有し、上記操作体を中立位置に付勢して無操作状態では上記操作体を中立位置に保持する保持機構を備え、その操作体が中立位置から上記異なる2方向のいずれか一方に操作されたことを検出すると、車両に加速度若しくは減速度を付与すると共に、
上記操作体が中立位置にあることを検出すると、車両を停止可能な減速度を車両に付与することを特徴とする車両用走行制御方法。
【請求項1】
車両の運転者が加速及び減速指示のために中立位置に対し異なる2方向へ操作可能な操作体と、
上記操作体を中立位置に付勢して無操作状態では当該操作体を中立位置に保持する保持機構と、
上記操作体の中立位置から上記2方向のうちの一方向への操作を加速操作として検出し、上記操作体の中立位置から上記2方向のうちの他方向への操作を減速操作として検出して、検出した加速操作若しくは減速操作に応じた目標加速度若しくは目標減速度を演算し、上記操作体が中立位置にあると判定すると、車両を停止可能な大きさの目標減速度を演算する加減速度演算手段と、
上記加減速度演算手段が演算した目標減速度に基づいて、車両を制動させる制動手段とを備えることを特徴とする車両用走行制御装置。
【請求項2】
上記操作体が中立位置にあると判定したときの目標減速度は、上記減速操作に応じた目標減速度の最小値以下であることを特徴とする請求項1に記載した車両用走行制御装置。
【請求項3】
上記加速操作に応じた目標加速度の最小値は、加速側のゼロ以上の大きさの値であることを特徴とする請求項1又は請求項2に記載した車両用走行制御装置。
【請求項4】
更に車速検出手段とを備え
上記操作体が中立位置にあると判定したときの目標減速度は、車速が小さい場合に比べて、車速が大きい場合の方が小さいことを特徴とする請求項1〜請求項3のいずれか1項に記載した車両用走行制御装置。
【請求項5】
車速に応じて、予め設定した停止距離である中立制動停止距離内で車両を停止可能な減速度を求める停止可能減速度算出手段を備え、
上記停止可能減速度算出手段が求めた減速度を、上記操作体が中立位置にあると判定したときの目標減速度とすることを特徴とする請求項4に記載した車両用走行制御装置。
【請求項6】
車速に応じて、予め設定した時間内で車両を停止可能な減速度を求める停止可能減速度算出手段を備え、
上記停止可能減速度算出手段が求めた減速度を、上記操作体が中立位置にあると判定したときの目標減速度とすることを特徴とする請求項4に記載した車両用走行制御装置。
【請求項7】
上記操作体が中立位置にあると判定したときの目標減速度は、車速が予め設定した閾値以下では車速の増加に伴い増加し、車速が予め設定した閾値を越えると車速の増加に伴い減少することを特徴とする請求項4に記載した車両用走行制御装置。
【請求項8】
上記操作体が中立位置にあると判定したときの目標減速度は、予め設定した車速毎の減速度に基づき決定し、
上記車速毎の減速度は、複数の運転者による各運転者毎の加減速操作と該加減速操作により車両に発生した加速・減速パターンのデータである収集データを、統計処理して抽出した値に基づき設定し、
上記収集データは、加速操作用の操作体及び減速操作用の操作体を備え且つその2つの操作体が無操作の状態では目標減速度がゼロの車両を上記各運転者が運転して収集したデータであることを特徴とする請求項4に記載した車両用走行制御装置。
【請求項9】
上記車速毎の減速度は、上記収集データのうちの、加速操作用の操作体が加速操作状態から無操作となった瞬間または加速操作用の操作体が加速操作状態から無操作となった直後から予め設定した時間以内に車両に発生している減速度と、上記加速操作用の操作体が加速操作状態から無操作になった瞬間の車速とに基づき設定したことを特徴とする請求項8に記載した車両用走行制御装置。
【請求項10】
操作体が加速操作状態から中立位置になった瞬間だけ、上記操作体が中立位置にあると判定したときの目標減速度として、請求項9に記載の車速毎の減速度を適用することを特徴とする請求項9に記載した車両用走行制御装置。
【請求項11】
上記収集データは、車両に発生した速度変化の時系列データに基づき、車両に発生した速度変化のパターンを抽出すると共に、その抽出した速度変化のパターン毎にそのパターンに応じた減速度を求めて、その抽出した速度変化のパターンと対応する減速度をパターン参照データとして記憶しておき、
車両の速度変化のパターンと上記記憶している速度変化のパターンとが類似性が高いと判定すると、その類似性が高いと判定された上記記憶している速度変化のパターンに対応する減速度を、上記操作体が中立位置にあると判定したときの目標減速度に設定することを特徴とする請求項8に記載した車両用走行制御装置。
【請求項12】
車両の運転者が中立位置に対し異なる2方向へ加減速操作する操作体を有し、上記操作体を中立位置に付勢して無操作状態では上記操作体を中立位置に保持する保持機構を備え、その操作体が中立位置から上記異なる2方向のいずれか一方に操作されたことを検出すると、車両に加速度若しくは減速度を付与すると共に、
上記操作体が中立位置にあることを検出すると、車両を停止可能な減速度を車両に付与することを特徴とする車両用走行制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−162208(P2012−162208A)
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願番号】特願2011−25546(P2011−25546)
【出願日】平成23年2月9日(2011.2.9)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成24年8月30日(2012.8.30)
【国際特許分類】
【出願日】平成23年2月9日(2011.2.9)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]