
車両用走行制御装置
【課題】二輪駆動の車両でも駆動輪のスリップによる誤差を補正値に反映しないようにして、車両の横加速度の推定精度を高めることにある。
【解決手段】車両1の左右の従動輪6,7の車輪速のうち一方の車輪速で他方の車輪速を除した値を補正係数として算出し、前記一方の車輪速に前記補正係数を乗じた値を一方の車輪速補正値として出力し、前記一方の車輪速補正値と前記他方の車輪速とに基づき横加速度を推定するようにした車両用走行制御装置3である。
【解決手段】車両1の左右の従動輪6,7の車輪速のうち一方の車輪速で他方の車輪速を除した値を補正係数として算出し、前記一方の車輪速に前記補正係数を乗じた値を一方の車輪速補正値として出力し、前記一方の車輪速補正値と前記他方の車輪速とに基づき横加速度を推定するようにした車両用走行制御装置3である。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両の車輪の左右それぞれの車輪速に基づき前記車両の横加速度を推定する横加速度推定手段を備え、その横加速度推定手段が推定した横加速度に基づき前記車両の走行状態を制御する車両用走行制御装置に関するものである。なお、この明細書では、特に断らない限り「回転数」とは「単位時間当たりの回転数」すなわち「回転速度」を意味する。
【背景技術】
【0002】
従来、車両の走行状態を制御する車両用走行制御装置として特許文献1記載のものが知られており、この制御装置は、車両のブレーキのアンチロック制御等のために車両の横加速度を推定するに際し、左右それぞれの前後輪の速度比(後輪速/前輪速)RAl,RArを車輪速の積分値の比として算出し、さらに左右輪の速度比が1より大きくなるように速度比RAl,Rarのうち大きい方を小さい方で除算して補正比RAを算出する。そしてその補正比から1を減算し、それに車体速の2乗を掛け、さらに後輪トレッドTRと重力加速度gとで除算した値を、真の横加速度からのずれ量TKYGとして算出している。
【0003】
これを数式で表すと以下のようになる。
RA=max[RAl,RAr]/min[Ral,Rar]
TKYG=V×V×(RA−1)/(TR×g)
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−030735号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら上記従来の制御装置では、4輪全ての車輪速を計算に含む構成となっていたため、フロントエンジン・前輪駆動(FF)やフロントエンジン・後輪駆動(FR)等の二輪駆動の車両では駆動輪のスリップによる誤差を補正値に反映してしまい、車両の横加速度の推定精度が低くなるという問題があった。
【課題を解決するための手段】
【0006】
この発明の車両用走行制御装置は、車両の車輪のうち従動輪の左右の車輪速のうち一方の車輪速で他方の車輪速を除した値を補正係数として算出し、前記一方の車輪速に前記補正係数を乗じた値を一方の車輪速補正値として出力し、横加速度推定手段が、前記一方の車輪速補正値と前記他方の車輪速とに基づき横加速度を推定するようにしたものである。
【発明の効果】
【0007】
この発明の車両用走行制御装置によれば、従動輪のみの左右の車輪速に基づく補正係数を用いて車両の横加速度を推定するので、フロントエンジン・前輪駆動(FF)やフロントエンジン・後輪駆動(FR)等の二輪駆動の車両でも駆動輪のスリップによる誤差を補正値に反映することがなく、それゆえ車両の横加速度の推定精度を高めることができる。
【図面の簡単な説明】
【0008】
【図1】本発明の車両用走行制御装置の一実施形態を構成する変速機制御ユニットを搭載した自動車のシステム構成を示す説明図である。
【図2】上記実施形態の車両用走行制御装置の構成を機能的に示すブロック線図である。
【図3】上記実施形態の車両用走行制御装置が実行する補正横加速度の算出処理の一例を示すブロック線図である。
【図4】上記実施形態の車両用走行制御装置が実行する補正横加速度の算出処理の他の一例を示すブロック線図である。
【図5】上記実施形態の車両用走行制御装置を用いた自動車と従来技術に係る制御装置を用いた自動車とのカーブ走行から直線走行に至る際の各因子の時間変化をそれぞれ示すグラフである。
【図6】上記実施形態の車両用走行制御装置を用いた自動車と従来技術に係る制御装置を用いた自動車との直線走行からカーブ走行を経て直線走行に戻る際の各因子の時間変化をそれぞれ示すグラフである。
【図7】上記実施形態の車両用走行制御装置を用いた自動車の直線走行とカーブ走行との繰返しの際の各因子の時間変化をそれぞれ示すグラフである。
【発明を実施するための形態】
【0009】
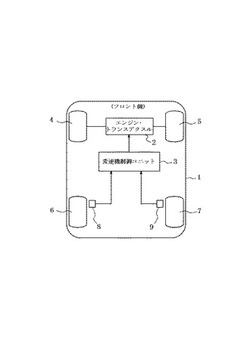
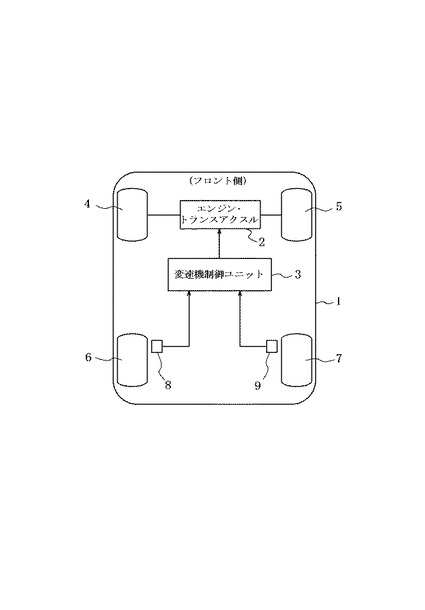
以下、本発明の車両用走行制御装置の実施形態を図面に基づき詳細に説明する。ここに図1は、本発明の車両用走行制御装置の一実施形態を構成する変速機制御ユニットを搭載した自動車のシステム構成を示す説明図、図2は、上記実施形態の車両用走行制御装置の構成を機能的に示すブロック線図であり、図1中、符号1は自動車を示す。
【0010】
図1に示す自動車1は、いわゆるフロントエンジン・前輪駆動(FF)型のもので、駆動源としてのエンジン・トランスアクスル2を備え、そのエンジン・トランスアクスル2はエンジンの出力回転を自動変速機で減速し、差動ギヤ機構を介して左右に出力する。エンジン・トランスアクスル2の自動変速機の作動は、通常のマイクロコンピュータを有する変速機制御ユニット3が制御する。自動車1の左右前輪4,5はエンジン・トランスアクスル2からの出力回転で駆動する一方、自動車1の左右後輪6,7は従動輪となる。
【0011】
左右後輪6,7には通常の回転数センサ8,9を設けてあり、これら回転数センサ8,9は左右後輪6,7の回転数を検出して変速機制御ユニット3に入力し、変速機制御ユニット3はそれら左右後輪6,7の回転数に基づき後述の如くして、自動車1に加わっている横加速度(横G)を推定し、その推定結果に基づき、カーブ走行中の横加速度が駆動輪である左右前輪4,5の摩擦力に対して過大であると判断した場合には、図示しないエンジン制御ユニットとの協調制御で、エンジン出力を低下させつつ変速比をハイ(変速比小)側に移行させて、左右前輪4,5のトラクションを摩擦力不足で滑らない程度に低下させ、カーブに沿ったニュートラルステア傾向での走行を可能にする。
【0012】
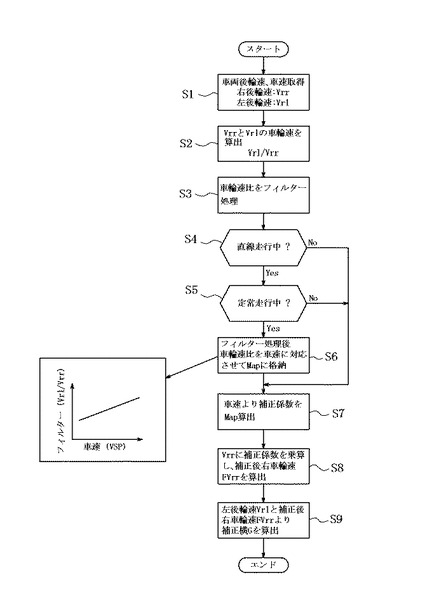
変速機制御ユニット3は、自動車1に加わっている横加速度(横G)を推定するために、例えば図2にブロック線図で示す補正横G演算部の構成に相当する、図3に示す処理を実行する。図2の構成に対応する図3では、変速機制御ユニット3が、ステップS1で、あらかじめ回転数センサ8,9の出力する左右後輪6,7の回転数にそれぞれ基準車輪直径と円周率πとを乗じて右後輪速Vrrと左後輪速Vrlとを求め、ステップS2で、車輪速比演算部11として、それらを除算して車輪速比Vrl/Vrrを求め、ステップS3で、フィルター処理部12として、その車輪速比Vrl/Vrrを1次遅れフィルターを用いて平滑化処理(フィルター処理)したフィルター処理後車輪速比Filter(Vrl/Vrr)を、横G補正係数として求める。
【0013】
一方、変速機制御ユニット3は、ステップS4で、直線判定部14として、後述の如くして先に求めた横加速度(横G)を時間微分した横G微分値から、後述のように、その横G微分値がプラス・マイナスに細かく振れていれば直線走行中と判断し、横G微分値がプラスかマイナスに偏っているかまたはその横G微分値をフィルター処理した値の絶対値が所定値以上であればカーブ走行中と判断する。また、ステップS5で、右後輪速Vrrと左後輪速Vrlとの平均値として求めた車速Vspを時間微分して得た、自動車1に加わっている前後加速度(前後G)から、定常走行判定部15として、その前後Gが所定範囲内であれば自動車1が定常(定速)走行中であると判断し、前後Gが所定範囲から外れていれば加速中または減速中であると判断する。
【0014】
しかして変速機制御ユニット3は、Map格納&算出部13として、ステップS4,S5で、自動車1が直線走行中かつ定常走行中であると判断した場合に、ステップS6で、上述したフィルター処理後車輪速比Filter(Vrl/Vrr)を、図3中左側に示すように、上記車速と対応させた値としてマップに記憶する。また、ステップS4で自動車1が直線走行中でないと判断した場合、またはステップS5で自動車1が定常(定速)走行中でないと判断した場合には、ステップS6はスキップする。
【0015】
そして変速機制御ユニット3は、補正後車輪速演算部16として、ステップS7で、横G補正係数としての、現在の車速に対応するフィルター処理後車輪速比Filter(Vrl/Vrr)をMap格納&算出部13のマップから読み出して、ステップS8で、右後輪速Vrrにそのフィルター処理後車輪速比Filter(Vrl/Vrr)を乗ずることで補正後右後輪速FVrrを求めて出力し、その後、ステップS9で、横G演算部17として、その補正後右後輪速FVrrと、左後輪速Vrlとから、次式により横加速度(横G)の推定値を算出する。但し、TRは左右後輪6,7間のトレッドである。
横G=(Vrl−FVrr)×(Vrl+FVrr)/(2×TR)
【0016】
変速機制御ユニット3は、異径タイヤ等による横G誤差を補正したこの横加速度の推定値を用いて、前述の如く変速比を制御することで、自動車1の操舵特性をニュートラルステア傾向に維持することができる。
【0017】
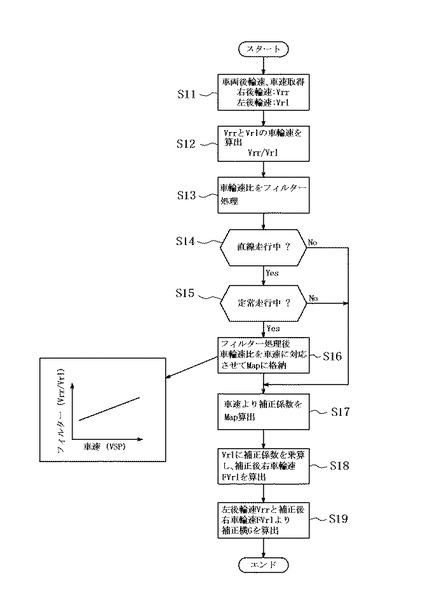
変速機制御ユニット3は、図3に示すフローチャートに代えて、図4に示すフローチャートを実行しても良く、この図4では、変速機制御ユニット3が、ステップS11で、あらかじめ回転数センサ8,9の出力する左右後輪6,7の回転数にそれぞれ基準車輪直径と円周率πとを乗じて右後輪速Vrrと左後輪速Vrlとを求め、ステップS12で、それらを除算して車輪速比Vrr/Vrlを求め、ステップS13で、その車輪速比Vrr/Vrlを1次遅れフィルターを用いて平滑化処理したフィルター処理後車輪速比Filter(Vrr/Vrl)を、横G補正係数として求める。
【0018】
一方、変速機制御ユニット3は、ステップS14で、先に求めた横加速度(横G)を時間微分した横G微分値から、その横G微分値がプラス・マイナスに振れていれば直線走行中と判断し、横G微分値がプラスかマイナスに偏っていればカーブ走行中と判断する。また、ステップS15で、右後輪速Vrrと左後輪速Vrlとの平均値として求めた車速を時間微分して得た、自動車1に加わっている前後加速度(前後G)から、その前後Gが所定範囲内であれば自動車1が定常走行中であると判断し、前後Gが所定範囲から外れていれば加減速中であると判断する。
【0019】
しかして、変速機制御ユニット3は、ステップS14,S15で、自動車1が直線走行中かつ定常走行中であると判断した場合に、ステップS16で、上述したフィルター処理後車輪速比Filter(Vrr/Vrl)を、図3中左側に示すように、上記車速と対応させた値としてマップに記憶する。また、ステップS14,S15で、自動車1が直線走行でないかまたは定常走行中でないと判断した場合には、ステップS16はスキップする。
【0020】
そして変速機制御ユニット3は、ステップS17で、横G補正係数としての、現在の車速に対応するフィルター処理後車輪速比Filter(Vrr/Vrl)をMap格納&算出部13のマップから読み出して、ステップS18で、左後輪速Vrlにそのフィルター処理後車輪速比Filter(Vrr/Vrl)を乗ずることで補正後左後輪速FVrlを求めて出力し、その後、ステップS19で、その補正後左後輪速FVrlと、右後輪速Vrrとから、次式により横加速度(横G)の推定値を算出する。但し、TRは左右後輪6,7間のトレッドである。
横G=(Vrr−FVrl)×(Vrr+FVrl)/(2×TR)
【0021】
図5は、上記実施形態の車両用走行制御装置を用いた自動車1と従来技術に係る制御装置を用いた自動車1とのカーブ走行から直線走行に至る際の各因子の時間変化をそれぞれ示しており、図示のように、自動車1のカーブ走行中は、従動輪としての左右後輪6,7の車輪速Vrl,Vrr間にカーブの旋回半径に応じた内外輪差が生じるとともに、その旋回半径と車速とに応じた実横Gが発生し、その一方で、車輪速Vrl,Vrrから横G補正係数(本実施形態ではフィルター処理後車輪速比)が求まり、さらにその横G補正係数を用いて車輪速から計算した横Gが求まっている。その後、直線走行に移ると、本実施形態では直線判定中かつ定常走行中は常時横G補正係数の更新を行うため、時刻t1で直線判定がされると、その直後から横G補正係数の修正を開始し、横Gも直ぐに修正方向に補正される。一方、従来の制御装置では、車輪速の積分を一定時間行うため、横G補正係数の修正が直ぐにはなされず時刻t2以降に遅くなり、横Gの補正も時刻t2以降に遅れる。また横G補正係数が積分中の走行状態の影響を受け、横Gの収束量が変わってしまう。
【0022】
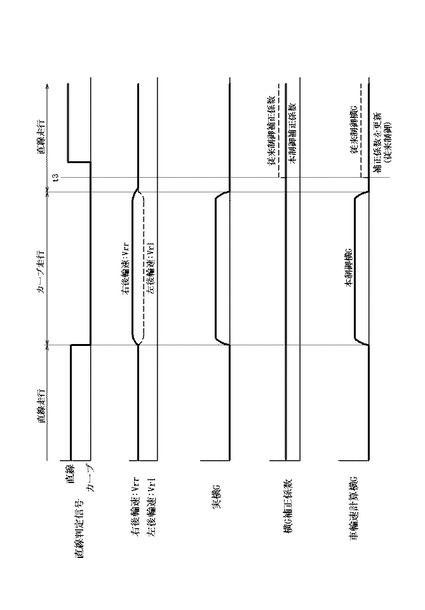
図6は、上記実施形態の車両用走行制御装置を用いた自動車1と従来技術に係る制御装置を用いた自動車1との直線走行からカーブ走行を経て直線走行に戻る際の各因子の時間変化をそれぞれ示しており、図示のように、自動車1の直線走行中は、従動輪としての左右後輪6,7の車輪速Vrl,Vrr間に内外輪差が生じていず、実横Gも車輪速計算横Gも発生していない。そしてカーブ走行に移ると、図5のカーブ走行中と同様、左右後輪6,7の車輪速Vrl,Vrr間にカーブの旋回半径に応じた内外輪差が生じるとともに、その旋回半径と車速とに応じた実横Gが発生し、その一方で、車輪速Vrl,Vrrから横G補正係数(本実施形態ではフィルター処理後車輪速比)が求まり、さらにその横G補正係数を用いて車輪速から計算した横Gが求まる。その際、本実施形態では直線走行中かつ定常走行中のみ横G補正係数の更新を行うため、カーブ走行中は補正係数が変化しないが、従来の制御装置では、カーブ走行中の車輪速も補正計算に含めているため、直線走行に戻ると、カーブ走行中の車輪速の積分結果も含めて時刻t3で補正係数の修正を行ってしまう。従ってその後の直線走行中、本実施形態では、横Gを意図通りゼロとして算出しているが、従来の制御装置ではカーブ走行時の外乱により、横Gをゼロでない値に算出してしまう。
【0023】
図7は、上記実施形態の車両用走行制御装置を用いた自動車1の直線走行とカーブ走行との繰返しの際の各因子の時間変化をそれぞれ示しており、図示のように、実横Gは、直線走行中はゼロであり、カーブ走行中は上昇および下降する。そして時刻t4,t5間のカーブ定常(定速)走行中はほぼ一定になる。これに対し、車輪速計算横Gを時間微分した微分値は、直線走行中はプラス(+)とマイナス(−)とに細かく振動的に振れ、カーブ走行中の最初および最後はプラス(+)およびマイナス(−)に偏る。そして中間の時刻t4,t5間のカーブ定常(定速)走行中は、直線走行中と同様にプラス(+)とマイナス(−)に振動的に振れるため、そのままでは直線走行中と紛らわしい。そこで本実施形態では、カーブの始まりと終わりとを、上記横G微分値の所定時間以上の偏りから判断し、その始まりと終わりとの中間でのカーブ定常走行については、横G微分値を一次遅れフィルターを用いて平滑化処理(フィルター処理)し、そのフィルター処理後の横G微分値の絶対値を正の所定の閾値Sと比較して、横G微分値が閾値S以上のときはカーブ定常走行中であり、横G微分値が閾値S未満のときは直線走行中であると判断している。
【0024】
なお、フィルター処理部12およびステップS3,S13における平滑化処理(フィルター処理)は、一次遅れフィルターを用いる代わりにPID(比例積分微分)制御等の目標値追従制御を用いて行うこともでき、そのようにすれば、自動車1の仕様等に応じて最適な制御を選択することができる。また、横G補正係数は、車輪速比をフィルター処理するのに代えて、例えば(1−(Vrr-Vrl)/Vsp)等の車輪速差を一次遅れフィルター等でフィルター処理して求めることもでき、そのようにすれば、自動車1の仕様等に応じて最適な演算方法を選択することができる。
【0025】
従って、横G演算部17は横加速度推定手段に相当し、車輪速比演算部11は補正係数算出手段に相当し、補正後車輪速演算部16は車輪速補正手段に相当する。そして、上述した本実施形態の車両用走行制御装置によれば、従動輪6,7のみの左右の車輪速Vrl,Vrrに基づく補正係数Filter(Vrl/Vrr)またはFilter(Vrr/Vrl)を用いて自動車1の横加速度を推定するので、フロントエンジン・前輪駆動(FF)の自動車1でも駆動輪4,5のスリップによる誤差を補正値に反映することがなく、それゆえ自動車1の横加速度の推定精度を高めることができる。
【0026】
しかも本実施形態の車両用走行制御装置によれば、補正係数記憶手段に相当するMap格納&算出部13が、補正係数を車速に対応させて記憶し、車輪速補正手段に相当する補正後車輪速演算部16は、そのMap格納&算出部13に記憶された、車速に対応する補正係数に基づき車輪速補正値を算出するので、タイヤ剛性やタイヤ空気圧に起因する左右後輪6,7の動半径変化に対応して、低車速から高車速まで安定して横加速度の補正を行うことができる。
【0027】
さらに本実施形態の車両用走行制御装置によれば、補正係数記憶手段に相当するMap格納&算出部13は、図6に示すように、自動車1が直進走行しているときの補正係数の記憶を行ない、カーブ(旋回)走行しているときの補正係数の記憶は行わないので、カーブ走行中の横加速度による左右後輪6,7の動半径変化や外乱等による横加速度の誤った補正を回避することができる。また、Map格納&算出部13は、自動車1が定常走行しているときの補正係数の記憶を行ない、加減速中の補正係数の記憶は行わないので、加減速中の前後加速度による左右後輪6,7の動半径変化や外乱等による横加速度の誤った補正を回避することができる。
【0028】
さらに本実施形態の車両用走行制御装置によれば、直進走行判断手段に相当する直進判定部14が、図7に示すように、推定した横加速度の微分値と、その微分値に対して一次遅れ処理を施した値の絶対値とに基づき直進走行か否かを判断するので、左右後輪6,7の直径差が発生した場合に直ちに収束方向へ横加速度を補正することができる。
【0029】
さらに本実施形態の車両用走行制御装置によれば、変速機制御ユニット3が補正係数算出手段として、車輪速比をフィルター処理するのに代えて例えば(1−(Vrr-Vrl)/Vsp)等の車輪速差をフィルター処理して横G補正係数を求めるようにすることで、自動車1の仕様等に応じて最適な演算方法を選択することができる。
【0030】
そして本実施形態の車両用走行制御装置によれば、補正係数算出手段に相当するフィルター処理部12が、一方の車輪速で他方の車輪速を除した値、または上記のように一方の車輪速と他方の車輪速との差の値に対して、一次遅れフィルターや目標値追従制御等で平滑化処理を施し、その平滑化処理後の値を補正係数として算出するので、推定した横加速度が外乱等の影響を受けてばたつくのを抑制することができる。
【0031】
以上、図示例に基づき説明したが、この発明は上述の例に限定されるものでなく、特許請求の範囲の記載範囲内で適宜変更することができ、例えば、上記実施形態は自動車1が直線走行中でも定常走行中の補正係数でなければ記憶を行わないが、この発明は直線走行中であれば加減速走行中の補正係数でも記憶を行うようにすることもできる。そして、上記実施形態はフロントエンジン・前輪駆動(FF)型の車両に適用したが、この発明はフロントエンジン・後輪駆動(FR)型の車両にも適用でき、また上記実施形態は変速機制御ユニットに適用したが、この発明はアンチロックブレーキシステムや駆動力配分制御システムの如き他の種類の車両用走行制御装置にも適用することができる。
【産業上の利用可能性】
【0032】
かくしてこの発明の車両用走行制御装置によれば、従動輪のみの左右の車輪速に基づく補正係数を用いて車両の横加速度を推定するので、フロントエンジン・前輪駆動(FF)やフロントエンジン・後輪駆動(FR)等の二輪駆動の車両でも駆動輪のスリップによる誤差を補正値に反映することがなく、それゆえ車両の横加速度の推定精度を高めることができる。
【符号の説明】
【0033】
1 自動車
2 エンジン・トランスアクスル
3 変速機制御ユニット(横加速度推定手段、補正係数算出手段、車輪速補正手段、補正係数記憶手段、直進走行判断手段)
4 左前輪
5 右前輪
6 左後輪(従動輪)
7 右後輪(従動輪)
8 回転数センサ
9 回転数センサ
11 車輪速比演算部(補正係数算出手段)
12 フィルター処理部(補正係数算出手段)
13 Map格納&算出部(補正係数記憶手段)
14 直線判定部(直線走行判断手段)
15 定常走行判定部
16 補正後車輪速演算部(車輪速補正手段)
17 横G演算部(横加速度推定手段)
【技術分野】
【0001】
本発明は、車両の車輪の左右それぞれの車輪速に基づき前記車両の横加速度を推定する横加速度推定手段を備え、その横加速度推定手段が推定した横加速度に基づき前記車両の走行状態を制御する車両用走行制御装置に関するものである。なお、この明細書では、特に断らない限り「回転数」とは「単位時間当たりの回転数」すなわち「回転速度」を意味する。
【背景技術】
【0002】
従来、車両の走行状態を制御する車両用走行制御装置として特許文献1記載のものが知られており、この制御装置は、車両のブレーキのアンチロック制御等のために車両の横加速度を推定するに際し、左右それぞれの前後輪の速度比(後輪速/前輪速)RAl,RArを車輪速の積分値の比として算出し、さらに左右輪の速度比が1より大きくなるように速度比RAl,Rarのうち大きい方を小さい方で除算して補正比RAを算出する。そしてその補正比から1を減算し、それに車体速の2乗を掛け、さらに後輪トレッドTRと重力加速度gとで除算した値を、真の横加速度からのずれ量TKYGとして算出している。
【0003】
これを数式で表すと以下のようになる。
RA=max[RAl,RAr]/min[Ral,Rar]
TKYG=V×V×(RA−1)/(TR×g)
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2007−030735号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら上記従来の制御装置では、4輪全ての車輪速を計算に含む構成となっていたため、フロントエンジン・前輪駆動(FF)やフロントエンジン・後輪駆動(FR)等の二輪駆動の車両では駆動輪のスリップによる誤差を補正値に反映してしまい、車両の横加速度の推定精度が低くなるという問題があった。
【課題を解決するための手段】
【0006】
この発明の車両用走行制御装置は、車両の車輪のうち従動輪の左右の車輪速のうち一方の車輪速で他方の車輪速を除した値を補正係数として算出し、前記一方の車輪速に前記補正係数を乗じた値を一方の車輪速補正値として出力し、横加速度推定手段が、前記一方の車輪速補正値と前記他方の車輪速とに基づき横加速度を推定するようにしたものである。
【発明の効果】
【0007】
この発明の車両用走行制御装置によれば、従動輪のみの左右の車輪速に基づく補正係数を用いて車両の横加速度を推定するので、フロントエンジン・前輪駆動(FF)やフロントエンジン・後輪駆動(FR)等の二輪駆動の車両でも駆動輪のスリップによる誤差を補正値に反映することがなく、それゆえ車両の横加速度の推定精度を高めることができる。
【図面の簡単な説明】
【0008】
【図1】本発明の車両用走行制御装置の一実施形態を構成する変速機制御ユニットを搭載した自動車のシステム構成を示す説明図である。
【図2】上記実施形態の車両用走行制御装置の構成を機能的に示すブロック線図である。
【図3】上記実施形態の車両用走行制御装置が実行する補正横加速度の算出処理の一例を示すブロック線図である。
【図4】上記実施形態の車両用走行制御装置が実行する補正横加速度の算出処理の他の一例を示すブロック線図である。
【図5】上記実施形態の車両用走行制御装置を用いた自動車と従来技術に係る制御装置を用いた自動車とのカーブ走行から直線走行に至る際の各因子の時間変化をそれぞれ示すグラフである。
【図6】上記実施形態の車両用走行制御装置を用いた自動車と従来技術に係る制御装置を用いた自動車との直線走行からカーブ走行を経て直線走行に戻る際の各因子の時間変化をそれぞれ示すグラフである。
【図7】上記実施形態の車両用走行制御装置を用いた自動車の直線走行とカーブ走行との繰返しの際の各因子の時間変化をそれぞれ示すグラフである。
【発明を実施するための形態】
【0009】
以下、本発明の車両用走行制御装置の実施形態を図面に基づき詳細に説明する。ここに図1は、本発明の車両用走行制御装置の一実施形態を構成する変速機制御ユニットを搭載した自動車のシステム構成を示す説明図、図2は、上記実施形態の車両用走行制御装置の構成を機能的に示すブロック線図であり、図1中、符号1は自動車を示す。
【0010】
図1に示す自動車1は、いわゆるフロントエンジン・前輪駆動(FF)型のもので、駆動源としてのエンジン・トランスアクスル2を備え、そのエンジン・トランスアクスル2はエンジンの出力回転を自動変速機で減速し、差動ギヤ機構を介して左右に出力する。エンジン・トランスアクスル2の自動変速機の作動は、通常のマイクロコンピュータを有する変速機制御ユニット3が制御する。自動車1の左右前輪4,5はエンジン・トランスアクスル2からの出力回転で駆動する一方、自動車1の左右後輪6,7は従動輪となる。
【0011】
左右後輪6,7には通常の回転数センサ8,9を設けてあり、これら回転数センサ8,9は左右後輪6,7の回転数を検出して変速機制御ユニット3に入力し、変速機制御ユニット3はそれら左右後輪6,7の回転数に基づき後述の如くして、自動車1に加わっている横加速度(横G)を推定し、その推定結果に基づき、カーブ走行中の横加速度が駆動輪である左右前輪4,5の摩擦力に対して過大であると判断した場合には、図示しないエンジン制御ユニットとの協調制御で、エンジン出力を低下させつつ変速比をハイ(変速比小)側に移行させて、左右前輪4,5のトラクションを摩擦力不足で滑らない程度に低下させ、カーブに沿ったニュートラルステア傾向での走行を可能にする。
【0012】
変速機制御ユニット3は、自動車1に加わっている横加速度(横G)を推定するために、例えば図2にブロック線図で示す補正横G演算部の構成に相当する、図3に示す処理を実行する。図2の構成に対応する図3では、変速機制御ユニット3が、ステップS1で、あらかじめ回転数センサ8,9の出力する左右後輪6,7の回転数にそれぞれ基準車輪直径と円周率πとを乗じて右後輪速Vrrと左後輪速Vrlとを求め、ステップS2で、車輪速比演算部11として、それらを除算して車輪速比Vrl/Vrrを求め、ステップS3で、フィルター処理部12として、その車輪速比Vrl/Vrrを1次遅れフィルターを用いて平滑化処理(フィルター処理)したフィルター処理後車輪速比Filter(Vrl/Vrr)を、横G補正係数として求める。
【0013】
一方、変速機制御ユニット3は、ステップS4で、直線判定部14として、後述の如くして先に求めた横加速度(横G)を時間微分した横G微分値から、後述のように、その横G微分値がプラス・マイナスに細かく振れていれば直線走行中と判断し、横G微分値がプラスかマイナスに偏っているかまたはその横G微分値をフィルター処理した値の絶対値が所定値以上であればカーブ走行中と判断する。また、ステップS5で、右後輪速Vrrと左後輪速Vrlとの平均値として求めた車速Vspを時間微分して得た、自動車1に加わっている前後加速度(前後G)から、定常走行判定部15として、その前後Gが所定範囲内であれば自動車1が定常(定速)走行中であると判断し、前後Gが所定範囲から外れていれば加速中または減速中であると判断する。
【0014】
しかして変速機制御ユニット3は、Map格納&算出部13として、ステップS4,S5で、自動車1が直線走行中かつ定常走行中であると判断した場合に、ステップS6で、上述したフィルター処理後車輪速比Filter(Vrl/Vrr)を、図3中左側に示すように、上記車速と対応させた値としてマップに記憶する。また、ステップS4で自動車1が直線走行中でないと判断した場合、またはステップS5で自動車1が定常(定速)走行中でないと判断した場合には、ステップS6はスキップする。
【0015】
そして変速機制御ユニット3は、補正後車輪速演算部16として、ステップS7で、横G補正係数としての、現在の車速に対応するフィルター処理後車輪速比Filter(Vrl/Vrr)をMap格納&算出部13のマップから読み出して、ステップS8で、右後輪速Vrrにそのフィルター処理後車輪速比Filter(Vrl/Vrr)を乗ずることで補正後右後輪速FVrrを求めて出力し、その後、ステップS9で、横G演算部17として、その補正後右後輪速FVrrと、左後輪速Vrlとから、次式により横加速度(横G)の推定値を算出する。但し、TRは左右後輪6,7間のトレッドである。
横G=(Vrl−FVrr)×(Vrl+FVrr)/(2×TR)
【0016】
変速機制御ユニット3は、異径タイヤ等による横G誤差を補正したこの横加速度の推定値を用いて、前述の如く変速比を制御することで、自動車1の操舵特性をニュートラルステア傾向に維持することができる。
【0017】
変速機制御ユニット3は、図3に示すフローチャートに代えて、図4に示すフローチャートを実行しても良く、この図4では、変速機制御ユニット3が、ステップS11で、あらかじめ回転数センサ8,9の出力する左右後輪6,7の回転数にそれぞれ基準車輪直径と円周率πとを乗じて右後輪速Vrrと左後輪速Vrlとを求め、ステップS12で、それらを除算して車輪速比Vrr/Vrlを求め、ステップS13で、その車輪速比Vrr/Vrlを1次遅れフィルターを用いて平滑化処理したフィルター処理後車輪速比Filter(Vrr/Vrl)を、横G補正係数として求める。
【0018】
一方、変速機制御ユニット3は、ステップS14で、先に求めた横加速度(横G)を時間微分した横G微分値から、その横G微分値がプラス・マイナスに振れていれば直線走行中と判断し、横G微分値がプラスかマイナスに偏っていればカーブ走行中と判断する。また、ステップS15で、右後輪速Vrrと左後輪速Vrlとの平均値として求めた車速を時間微分して得た、自動車1に加わっている前後加速度(前後G)から、その前後Gが所定範囲内であれば自動車1が定常走行中であると判断し、前後Gが所定範囲から外れていれば加減速中であると判断する。
【0019】
しかして、変速機制御ユニット3は、ステップS14,S15で、自動車1が直線走行中かつ定常走行中であると判断した場合に、ステップS16で、上述したフィルター処理後車輪速比Filter(Vrr/Vrl)を、図3中左側に示すように、上記車速と対応させた値としてマップに記憶する。また、ステップS14,S15で、自動車1が直線走行でないかまたは定常走行中でないと判断した場合には、ステップS16はスキップする。
【0020】
そして変速機制御ユニット3は、ステップS17で、横G補正係数としての、現在の車速に対応するフィルター処理後車輪速比Filter(Vrr/Vrl)をMap格納&算出部13のマップから読み出して、ステップS18で、左後輪速Vrlにそのフィルター処理後車輪速比Filter(Vrr/Vrl)を乗ずることで補正後左後輪速FVrlを求めて出力し、その後、ステップS19で、その補正後左後輪速FVrlと、右後輪速Vrrとから、次式により横加速度(横G)の推定値を算出する。但し、TRは左右後輪6,7間のトレッドである。
横G=(Vrr−FVrl)×(Vrr+FVrl)/(2×TR)
【0021】
図5は、上記実施形態の車両用走行制御装置を用いた自動車1と従来技術に係る制御装置を用いた自動車1とのカーブ走行から直線走行に至る際の各因子の時間変化をそれぞれ示しており、図示のように、自動車1のカーブ走行中は、従動輪としての左右後輪6,7の車輪速Vrl,Vrr間にカーブの旋回半径に応じた内外輪差が生じるとともに、その旋回半径と車速とに応じた実横Gが発生し、その一方で、車輪速Vrl,Vrrから横G補正係数(本実施形態ではフィルター処理後車輪速比)が求まり、さらにその横G補正係数を用いて車輪速から計算した横Gが求まっている。その後、直線走行に移ると、本実施形態では直線判定中かつ定常走行中は常時横G補正係数の更新を行うため、時刻t1で直線判定がされると、その直後から横G補正係数の修正を開始し、横Gも直ぐに修正方向に補正される。一方、従来の制御装置では、車輪速の積分を一定時間行うため、横G補正係数の修正が直ぐにはなされず時刻t2以降に遅くなり、横Gの補正も時刻t2以降に遅れる。また横G補正係数が積分中の走行状態の影響を受け、横Gの収束量が変わってしまう。
【0022】
図6は、上記実施形態の車両用走行制御装置を用いた自動車1と従来技術に係る制御装置を用いた自動車1との直線走行からカーブ走行を経て直線走行に戻る際の各因子の時間変化をそれぞれ示しており、図示のように、自動車1の直線走行中は、従動輪としての左右後輪6,7の車輪速Vrl,Vrr間に内外輪差が生じていず、実横Gも車輪速計算横Gも発生していない。そしてカーブ走行に移ると、図5のカーブ走行中と同様、左右後輪6,7の車輪速Vrl,Vrr間にカーブの旋回半径に応じた内外輪差が生じるとともに、その旋回半径と車速とに応じた実横Gが発生し、その一方で、車輪速Vrl,Vrrから横G補正係数(本実施形態ではフィルター処理後車輪速比)が求まり、さらにその横G補正係数を用いて車輪速から計算した横Gが求まる。その際、本実施形態では直線走行中かつ定常走行中のみ横G補正係数の更新を行うため、カーブ走行中は補正係数が変化しないが、従来の制御装置では、カーブ走行中の車輪速も補正計算に含めているため、直線走行に戻ると、カーブ走行中の車輪速の積分結果も含めて時刻t3で補正係数の修正を行ってしまう。従ってその後の直線走行中、本実施形態では、横Gを意図通りゼロとして算出しているが、従来の制御装置ではカーブ走行時の外乱により、横Gをゼロでない値に算出してしまう。
【0023】
図7は、上記実施形態の車両用走行制御装置を用いた自動車1の直線走行とカーブ走行との繰返しの際の各因子の時間変化をそれぞれ示しており、図示のように、実横Gは、直線走行中はゼロであり、カーブ走行中は上昇および下降する。そして時刻t4,t5間のカーブ定常(定速)走行中はほぼ一定になる。これに対し、車輪速計算横Gを時間微分した微分値は、直線走行中はプラス(+)とマイナス(−)とに細かく振動的に振れ、カーブ走行中の最初および最後はプラス(+)およびマイナス(−)に偏る。そして中間の時刻t4,t5間のカーブ定常(定速)走行中は、直線走行中と同様にプラス(+)とマイナス(−)に振動的に振れるため、そのままでは直線走行中と紛らわしい。そこで本実施形態では、カーブの始まりと終わりとを、上記横G微分値の所定時間以上の偏りから判断し、その始まりと終わりとの中間でのカーブ定常走行については、横G微分値を一次遅れフィルターを用いて平滑化処理(フィルター処理)し、そのフィルター処理後の横G微分値の絶対値を正の所定の閾値Sと比較して、横G微分値が閾値S以上のときはカーブ定常走行中であり、横G微分値が閾値S未満のときは直線走行中であると判断している。
【0024】
なお、フィルター処理部12およびステップS3,S13における平滑化処理(フィルター処理)は、一次遅れフィルターを用いる代わりにPID(比例積分微分)制御等の目標値追従制御を用いて行うこともでき、そのようにすれば、自動車1の仕様等に応じて最適な制御を選択することができる。また、横G補正係数は、車輪速比をフィルター処理するのに代えて、例えば(1−(Vrr-Vrl)/Vsp)等の車輪速差を一次遅れフィルター等でフィルター処理して求めることもでき、そのようにすれば、自動車1の仕様等に応じて最適な演算方法を選択することができる。
【0025】
従って、横G演算部17は横加速度推定手段に相当し、車輪速比演算部11は補正係数算出手段に相当し、補正後車輪速演算部16は車輪速補正手段に相当する。そして、上述した本実施形態の車両用走行制御装置によれば、従動輪6,7のみの左右の車輪速Vrl,Vrrに基づく補正係数Filter(Vrl/Vrr)またはFilter(Vrr/Vrl)を用いて自動車1の横加速度を推定するので、フロントエンジン・前輪駆動(FF)の自動車1でも駆動輪4,5のスリップによる誤差を補正値に反映することがなく、それゆえ自動車1の横加速度の推定精度を高めることができる。
【0026】
しかも本実施形態の車両用走行制御装置によれば、補正係数記憶手段に相当するMap格納&算出部13が、補正係数を車速に対応させて記憶し、車輪速補正手段に相当する補正後車輪速演算部16は、そのMap格納&算出部13に記憶された、車速に対応する補正係数に基づき車輪速補正値を算出するので、タイヤ剛性やタイヤ空気圧に起因する左右後輪6,7の動半径変化に対応して、低車速から高車速まで安定して横加速度の補正を行うことができる。
【0027】
さらに本実施形態の車両用走行制御装置によれば、補正係数記憶手段に相当するMap格納&算出部13は、図6に示すように、自動車1が直進走行しているときの補正係数の記憶を行ない、カーブ(旋回)走行しているときの補正係数の記憶は行わないので、カーブ走行中の横加速度による左右後輪6,7の動半径変化や外乱等による横加速度の誤った補正を回避することができる。また、Map格納&算出部13は、自動車1が定常走行しているときの補正係数の記憶を行ない、加減速中の補正係数の記憶は行わないので、加減速中の前後加速度による左右後輪6,7の動半径変化や外乱等による横加速度の誤った補正を回避することができる。
【0028】
さらに本実施形態の車両用走行制御装置によれば、直進走行判断手段に相当する直進判定部14が、図7に示すように、推定した横加速度の微分値と、その微分値に対して一次遅れ処理を施した値の絶対値とに基づき直進走行か否かを判断するので、左右後輪6,7の直径差が発生した場合に直ちに収束方向へ横加速度を補正することができる。
【0029】
さらに本実施形態の車両用走行制御装置によれば、変速機制御ユニット3が補正係数算出手段として、車輪速比をフィルター処理するのに代えて例えば(1−(Vrr-Vrl)/Vsp)等の車輪速差をフィルター処理して横G補正係数を求めるようにすることで、自動車1の仕様等に応じて最適な演算方法を選択することができる。
【0030】
そして本実施形態の車両用走行制御装置によれば、補正係数算出手段に相当するフィルター処理部12が、一方の車輪速で他方の車輪速を除した値、または上記のように一方の車輪速と他方の車輪速との差の値に対して、一次遅れフィルターや目標値追従制御等で平滑化処理を施し、その平滑化処理後の値を補正係数として算出するので、推定した横加速度が外乱等の影響を受けてばたつくのを抑制することができる。
【0031】
以上、図示例に基づき説明したが、この発明は上述の例に限定されるものでなく、特許請求の範囲の記載範囲内で適宜変更することができ、例えば、上記実施形態は自動車1が直線走行中でも定常走行中の補正係数でなければ記憶を行わないが、この発明は直線走行中であれば加減速走行中の補正係数でも記憶を行うようにすることもできる。そして、上記実施形態はフロントエンジン・前輪駆動(FF)型の車両に適用したが、この発明はフロントエンジン・後輪駆動(FR)型の車両にも適用でき、また上記実施形態は変速機制御ユニットに適用したが、この発明はアンチロックブレーキシステムや駆動力配分制御システムの如き他の種類の車両用走行制御装置にも適用することができる。
【産業上の利用可能性】
【0032】
かくしてこの発明の車両用走行制御装置によれば、従動輪のみの左右の車輪速に基づく補正係数を用いて車両の横加速度を推定するので、フロントエンジン・前輪駆動(FF)やフロントエンジン・後輪駆動(FR)等の二輪駆動の車両でも駆動輪のスリップによる誤差を補正値に反映することがなく、それゆえ車両の横加速度の推定精度を高めることができる。
【符号の説明】
【0033】
1 自動車
2 エンジン・トランスアクスル
3 変速機制御ユニット(横加速度推定手段、補正係数算出手段、車輪速補正手段、補正係数記憶手段、直進走行判断手段)
4 左前輪
5 右前輪
6 左後輪(従動輪)
7 右後輪(従動輪)
8 回転数センサ
9 回転数センサ
11 車輪速比演算部(補正係数算出手段)
12 フィルター処理部(補正係数算出手段)
13 Map格納&算出部(補正係数記憶手段)
14 直線判定部(直線走行判断手段)
15 定常走行判定部
16 補正後車輪速演算部(車輪速補正手段)
17 横G演算部(横加速度推定手段)
【特許請求の範囲】
【請求項1】
車両の車輪の左右それぞれの車輪速に基づき前記車両の横加速度を推定する横加速度推定手段を備え、その横加速度推定手段が推定した横加速度に基づき前記車両の走行状態を制御する車両用走行制御装置において、
前記車輪のうち従動輪の左右の車輪速のうち一方の車輪速で他方の車輪速を除した値を補正係数として算出する補正係数算出手段と、
前記一方の車輪速に前記補正係数を乗じた値を一方の車輪速補正値として出力する車輪速補正手段と、
を備え、
前記横加速度推定手段は、前記一方の車輪速補正値と前記他方の車輪速とに基づき前記横加速度を推定することを特徴とする、車両用走行制御装置。
【請求項2】
前記補正係数を車速に対応させて記憶する補正係数記憶手段を備え、
前記車輪速補正手段は、前記補正係数記憶手段に記憶された補正係数に基づき前記一方の車輪速補正値を算出することを特徴とする、請求項1記載の車両用走行制御装置。
【請求項3】
前記補正係数記憶手段は、前記車両が直進走行しているときの前記補正係数について前記記憶を行ない、旋回走行しているときの前記補正係数については前記記憶を行わないことを特徴とする、請求項2記載の車両用走行制御装置。
【請求項4】
前記推定した横加速度の微分値と、前記横加速度の微分値に対して遅れ処理を施した値の絶対値とに基づき直進走行か否かを判断する直進走行判断手段を備えることを特徴とする、請求項3記載の車両用走行制御装置。
【請求項5】
前記補正係数算出手段は、前記一方の車輪速で他方の車輪速を除した値に代えて、前記一方の車輪速と前記他方の車輪速との差の値を前記補正係数として算出することを特徴とする、請求項1から4までの何れか1項記載の車両用走行制御装置。
【請求項6】
前記補正係数算出手段は、前記一方の車輪速で他方の車輪速を除した値、または前記一方の車輪速と前記他方の車輪速との差の値に対して平滑化処理を施し、その平滑化処理を施した値を前記補正係数として算出することを特徴とする、請求項1から5までの何れか1項記載の車両用走行制御装置。
【請求項1】
車両の車輪の左右それぞれの車輪速に基づき前記車両の横加速度を推定する横加速度推定手段を備え、その横加速度推定手段が推定した横加速度に基づき前記車両の走行状態を制御する車両用走行制御装置において、
前記車輪のうち従動輪の左右の車輪速のうち一方の車輪速で他方の車輪速を除した値を補正係数として算出する補正係数算出手段と、
前記一方の車輪速に前記補正係数を乗じた値を一方の車輪速補正値として出力する車輪速補正手段と、
を備え、
前記横加速度推定手段は、前記一方の車輪速補正値と前記他方の車輪速とに基づき前記横加速度を推定することを特徴とする、車両用走行制御装置。
【請求項2】
前記補正係数を車速に対応させて記憶する補正係数記憶手段を備え、
前記車輪速補正手段は、前記補正係数記憶手段に記憶された補正係数に基づき前記一方の車輪速補正値を算出することを特徴とする、請求項1記載の車両用走行制御装置。
【請求項3】
前記補正係数記憶手段は、前記車両が直進走行しているときの前記補正係数について前記記憶を行ない、旋回走行しているときの前記補正係数については前記記憶を行わないことを特徴とする、請求項2記載の車両用走行制御装置。
【請求項4】
前記推定した横加速度の微分値と、前記横加速度の微分値に対して遅れ処理を施した値の絶対値とに基づき直進走行か否かを判断する直進走行判断手段を備えることを特徴とする、請求項3記載の車両用走行制御装置。
【請求項5】
前記補正係数算出手段は、前記一方の車輪速で他方の車輪速を除した値に代えて、前記一方の車輪速と前記他方の車輪速との差の値を前記補正係数として算出することを特徴とする、請求項1から4までの何れか1項記載の車両用走行制御装置。
【請求項6】
前記補正係数算出手段は、前記一方の車輪速で他方の車輪速を除した値、または前記一方の車輪速と前記他方の車輪速との差の値に対して平滑化処理を施し、その平滑化処理を施した値を前記補正係数として算出することを特徴とする、請求項1から5までの何れか1項記載の車両用走行制御装置。
【図1】


【図2】

【図3】
【図4】
【図5】

【図6】
【図7】

【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【公開番号】特開2010−202013(P2010−202013A)
【公開日】平成22年9月16日(2010.9.16)
【国際特許分類】
【出願番号】特願2009−48505(P2009−48505)
【出願日】平成21年3月2日(2009.3.2)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成22年9月16日(2010.9.16)
【国際特許分類】
【出願日】平成21年3月2日(2009.3.2)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]