
車両用走行支援システム
【課題】運転者に対し渋滞を避けるべきか、最後尾につくべきかを知らせることが可能な車両用走行支援システムの提供。
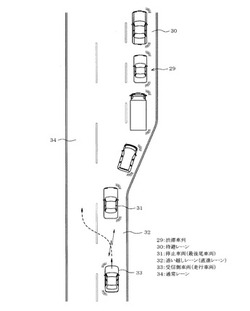
【解決手段】交差点において、右折するための渋滞車列29が右折待避レーン30から直進レーン32にまで延びると、最後尾車両31が車載ナビゲーション装置の車々間通信機により、後方を走行する車両33に対して渋滞情報を発信する。渋滞情報には、渋滞車列29の先頭車両の位置、最後尾車両31の位置および進行方向が含まれている。渋滞情報を受信した走行車両33の車載ナビゲーション装置は、位置検出器により自車両33の位置が渋滞車列29のあるレーン32であることを検出し、かつ自車両33の進行方向が交差点の直進である場合には、運転者に対して走行レーンを変更して渋滞車列29を回避するように指示する。
【解決手段】交差点において、右折するための渋滞車列29が右折待避レーン30から直進レーン32にまで延びると、最後尾車両31が車載ナビゲーション装置の車々間通信機により、後方を走行する車両33に対して渋滞情報を発信する。渋滞情報には、渋滞車列29の先頭車両の位置、最後尾車両31の位置および進行方向が含まれている。渋滞情報を受信した走行車両33の車載ナビゲーション装置は、位置検出器により自車両33の位置が渋滞車列29のあるレーン32であることを検出し、かつ自車両33の進行方向が交差点の直進である場合には、運転者に対して走行レーンを変更して渋滞車列29を回避するように指示する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、走行車両の運転者に対し、道路上の渋滞情報を提供する車両用走行支援システムに関する。
【背景技術】
【0002】
これまでにも、走行車両の運転者に対して、その運転を支援するために渋滞情報を提供する様々な従来技術があった。その一つとして、車両位置検出手段により、自車両の走行する車線を特定し、その車線上の渋滞情報を外部から送信される道路情報から入手するものがあった(例えば、特許文献1参照)。また、道路情報受信手段により受信した道路情報に基づき、表示装置に前方の渋滞レーンを示し、さらに、渋滞回避のためのレーンチェンジを促す車載装置に関するものもあった(例えば、特許文献2参照)。
このような、走行レーン前方における道路渋滞の有無を知らせるようなものにおいては、運転席からでは目視により確認できないような道路渋滞の存在を運転者が事前に知ることができ、走行車両が直進する場合には、渋滞を回避するために早めに対処することができる。
【0003】
しかしながら、その一方、この従来技術による渋滞情報では、運転者は自車両の走行しているレーンに渋滞があることを知りうるのみで、渋滞の原因といった情報を入手することはできず、渋滞に遭遇した車両の進行方向によっては、運転に必要な情報が不足することがあった。
通常、交差点において、右折車両が対向車の通過を待つために停止する待避レーンに多くの車両が入りこむと、停止した車列の後方の車両が待避レーンからはみ出して、直進レーンにまで並んで渋滞を引き起こすことは頻繁に見られる。このような渋滞に対して、交差点において右折したいと考えている車両が接近した場合、目前の渋滞が当該交差点において右折するための車両によるものか、あるいは別の原因によるものかがわからず、この渋滞の最後尾に自車両をつけるべきかどうかの判断ができないという不都合がある。
【0004】
また、渋滞に遭遇した車両の中には、間近の交差点は直進して通過し、その次の交差点において右折する予定のものもある。こういう車両にとっては、目前の渋滞が間近の交差点を右折する車両から始まっていれば、渋滞を回避する必要があり、その次の交差点を右折する車両から始まって、渋滞の車列がここまで延びているのであれば、自車両を渋滞の最後尾につける必要がある。このような状況においては、渋滞に遭遇した車両の運転者にとって、渋滞の最初の発生地点、あるいは渋滞車両の進行方向といった情報入手の必要性がある。
【特許文献1】特開2004−317386号公報
【特許文献2】特開平9−128686号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
このように、交差点等で右左折する車両にとっては、前方に渋滞が存在するということだけを知らせるものでは、この渋滞を避けるべきか、最後尾につくべきかを決定する情報としては不足している場合がある。
本発明は上記事情に鑑みてなされたものであり、その目的は、運転者に対し渋滞を避けるべきか、最後尾につくべきかを知らせることが可能な車両用走行支援システムを提供することにある。
【課題を解決するための手段】
【0006】
請求項1記載の車両用走行支援システムによれば、道路上において、走行中の車両が停止車両中の最後尾の車両から情報を受信した場合、走行指示手段は受信した情報、現在地検出手段により検出された自車両の位置、および進路検出手段により検出された自車両の進行方向に基づき、運転者に対し、停止車両を回避して走行するか、あるいは停止車両の後方に続いて停止させるかに関して指示する。これにより、運転者は、走行指示手段による指示により、停止車両に対する適切な運転方法を知ることができる。
【0007】
請求項2記載の車両用走行支援システムによれば、走行指示手段は、走行する自車両が現在走行しているレーンと停止車両中の最後尾の車両の位置するレーンとの異同、および走行する自車両の進行方向に基づいて、運転者に対し走行するレーンを変更するか否かを指示する。これにより、運転者は、走行指示手段による指示により、現在走行中のレーンを変更するべきか否かを知ることができる。
【0008】
請求項3記載の車両用走行支援システムによれば、停止車両中の最後尾の車両の位置が、道路上の右折用待避レーン上である場合、走行指示手段は運転者への指示は行わない。すなわち、停止車両中の最後尾の車両の位置が、道路上の右折用待避レーン上である場合、未だ、渋滞を引き起こしていないため、走行方法を指示する必要はなく、これにより、無駄な指示をすることを防ぐことができる。
【0009】
請求項4記載の車両用走行支援システムによれば、搭載された車載ナビゲーション装置により経路案内されて、交差点を右折する予定であった走行車両が、経路を変更して次の交差点以降において右折するために、停止車両中の最後尾の車両の位置するレーンからレーン変更して、右折予定していた交差点を直進した場合、車載ナビゲーション装置は再度経路探索を行う。これにより、交差点上における右折から直進走行への変更に対応して、再探索後の経路による案内を早めに実行できる。
【0010】
請求項5記載の車両用走行支援システムによれば、停止車両中の最後尾の車両から情報を受信した走行中の車両は、自車両よりも後方を走行している他の車両に対し、送受信手段により情報を送信し、走行しながら情報を受信した車両は、さらに、自車両よりも後方を走行している他の車両に対し、送受信手段により情報を送信し、以降、走行車両から、それよりも後方を走行する車両に情報を順次伝達する。これにより、走行中の車両を介して、後方の遠方車両へも渋滞情報を送信することができ、後方の車両は渋滞に対して早期に対応することができる。
【発明を実施するための最良の形態】
【0011】
<実施形態1>
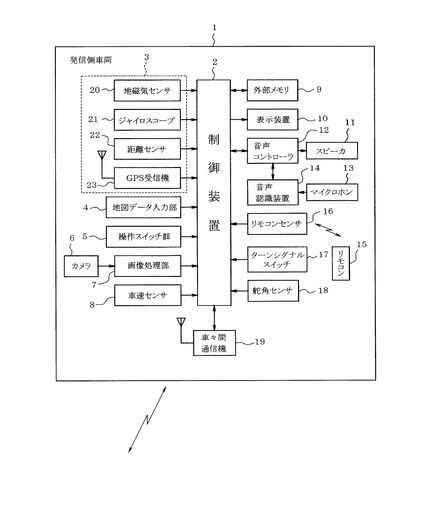
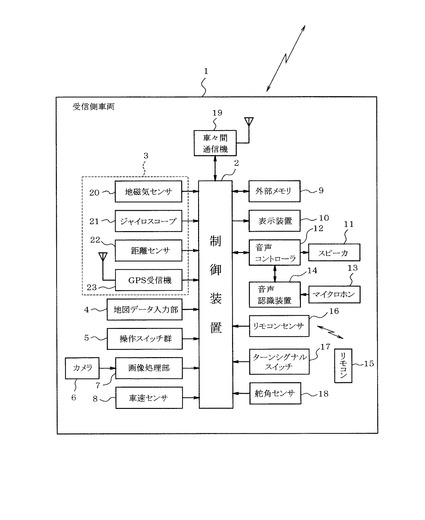
以下、図1乃至図12に基づいて、本発明の実施形態1による車両用走行支援システムについて説明する。図1および図2は、車両用走行支援システムの構成を示すブロック図である。車両用走行支援システムは、発信側車両(渋滞により停止した車列の先頭車両あるいは最後尾車両で後続の車両に情報を発信する車両)と受信側車両(渋滞により停止した車両から情報を受信する走行車両)とを含む複数の車両によって構成されている。発信側車両および受信側車両は、基本的に同一のものであってよく、道路上での状況に応じて、同一の車両が発信側車両となったり、受信側車両となったりするものである。
【0012】
各車両には、それぞれ車載ナビゲーション装置1が搭載されている。車載ナビゲーション装置1は、発信側マイコンを主体として構成された制御装置2、車両の現在位置を検出するための位置検出器3、地図データ入力部4、操作スイッチ群5、カメラ6、カメラ6に接続された画像処理部7、車速センサ8、外部メモリ9、カラー液晶ディスプレイ等からなる表示装置10、スピーカ11が接続された音声コントローラ12、マイクロホン13から入力された音声を認識する音声認識装置14、リモコン15との間でコマンド等の送受信を行うリモコンセンサ16、車両のステアリングコラム(図示せず)内蔵されたターンシグナルスイッチ17、車両のステアリングホイールの切り角を検出する舵角センサ18、他車との間で車々間通信を行う車々間通信機19から構成されている。
【0013】
位置検出器3は本発明の現在地検出手段に該当し、車両方位を検出する地磁気センサ20、車両の回転角速度を検出するジャイロスコープ21、車両の走行距離を検出する距離センサ22、人工衛星からの送信電波に基づいて車両(自車)の現在位置を検出(測位)するGPS(Global Positioning System)のためのGPS受信機23を有している。各センサ20〜23は、それぞれ性質の異なる誤差を有している。このため、制御装置2は、各センサ20〜23の検出値を補間しながら用いることにより、車両の現在位置、進行方向、速度、走行距離、現在時刻等を高精度で検出するようになっている。位置検出器3は、道路上のレーンを判別するために、これに限定されるものではないが、検出精度が1m程度のものを使用することが望ましい。なお、精度によっては、位置検出器3を上述したセンサ20〜23の一部のみで構成してもよい。また、上述した舵角センサ18や各転動輪の車輪センサ等を用いてもよい。
【0014】
地図データ入力部4は、道路地図データ、目印データ、マップマッチング用データ、目的地データ(施設データベース)、交通情報を道路データに変換するためのテーブルデータなどの各種データを記録した地図データ記録メディアからデータを読み出すためのドライブ装置により構成されている。地図データ記録メディアには、DVD等の大容量記憶媒体を用いるのが一般的であるが、メモリカード、ハードディスク装置等の媒体を用いてもよい。
【0015】
外部操作手段である操作スイッチ群5は、表示装置10の画面の近傍に設けられたメカニカルスイッチや、表示装置10の画面上に設けられるタッチパネルを含んで構成されている。ユーザは、この操作スイッチ群5を用いて、車両の目的地、目的地の検索に必要な情報(目的地検索条件)、通過点などの入力、表示装置10の画面や表示態様の切り替え(地図縮尺変更、メニュー表示選択、経路探索、経路案内開始、現在位置修正、音量調整等)を行う各種のコマンドの入力を行い、ナビゲーション装置1を作動させることができる。一方、リモコン15には複数の操作スイッチが設けられており、スイッチ操作によりリモコン15からリモコンセンサ16を介して各種の指令信号が制御装置2に送信される。なお、操作スイッチ群5とリモコン15は、何れの操作によっても制御装置2に同様の機能を実行させることができる。
【0016】
カメラ6は位置検出器3とともに本発明の現在地検出手段に該当し、可視光領域や赤外線領域で撮像可能なCCDカメラやCMOSカメラ等により形成されている。カメラ6は車両のフロントウィンドウ付近に取り付けられ、車両前方を撮影することにより、自車両が現在位置する走行レーン(走行車線)を検出している。また、画像処理部7は制御装置2と接続され、カメラ6によって形成された画像データを処理して、制御装置2へと送信する。
【0017】
車速センサ8は本発明の停車検出手段に該当し、車両のトランスミッション(図示せず)に取り付けられており、トランスミッションのギヤ回転速度から車両速度を検出するとともに、車速が0となった場合に車両の停止を検出する。また、車速センサ8は、これ以外の、例えば車両の駆動輪あるいは従動輪の回転速度から車両速度を検出するもの等であってもよい。
【0018】
外部メモリ9は、フラッシュメモリカード等から構成されている。この外部メモリ9には、特定のデータ例えば経路案内時に制御装置2が設定した目的地までの経路のデータ、車両が通過した経路のデータ等が記憶される。表示装置10の画面には、車両の位置周辺の地図が各種縮尺で表示されるとともに、その表示に重ね合わせて、車両の現在位置と進行方向とを示す現在地マーク(ポインタ)が表示される。また、目的地までの経路案内の実行時には経路案内用の画面が表示され、ユーザが目的地の検索に必要な情報等を入力したり、目的地の検索や設定を行うための入力用の画面や、各種のメッセージ等も表示される。さらに、走行車両が、渋滞により停止した車両から受信した情報に基づき、渋滞車列を先頭車両の位置および最後尾車両の位置を明らかにして、地図上に表示することも行う。尚、車載ナビゲーション装置1による経路案内機能は、ターンシグナルスイッチ17および舵角センサ18とともに、本発明の進路検出手段に該当している。
【0019】
音声認識装置14は、マイクロホン13を介して入力した音声と内部に記憶する認識用の辞書データとを照合し、入力された音声を認識する。音声コントローラ12は、音声認識装置14を制御して音声認識結果を制御装置2に出力するとともに、認識された音声はスピーカ11を介してトークバック出力する。また、制御装置2からの音声出力指令に基づいて音声出力信号をスピーカ11に出力する。スピーカ11から出力される音声は、案内に関する音声、操作説明に関する音声、盗難防止機能の動作中であることを報知する音声、音声認識結果に応じたトークバック音声、および停止車両から受信した情報に基づいて、運転者に対して走行方法に関する指示をする指示音声などである。
【0020】
ターンシグナルスイッチ17は車両のステアリングコラム(図示せず)内に取り付けられており、本発明の進路検出手段に該当して車両の進行方向を検出する。車両の運転者がウィンカレバーを操作することによりターンシグナルスイッチ17がオンされると、車両が右折あるいは左折することが検出され、オフ状態にある場合、車両が直進することが検出される。
【0021】
舵角センサ18はターンシグナルスイッチ17とともに本発明の進路検出手段に該当し、運転者がステアリングホイールを操作することにより、その操舵量を検出でき、車両の進行方向をも検出することができる。車々間通信機19は本発明の送受信手段に該当し、他の車両の車々間通信機19との間で情報の送受信を行う。車々間通信機19は、これに限定されるものではないが、通信範囲が半径数百mのものを使用することが望ましい。
【0022】
制御装置2を構成するマイコンはCPU、メモリ(RAM、ROM、EEPROM、フラッシュメモリ等)、I/Oなどを備えており、本発明の先頭車両判定手段および走行指示手段に該当している。制御装置2は、走行経路に沿って移動可能なように、表示装置10の画面に現在地周辺の道路地図を表示するとともに、車両の現在位置と進行方向を示す現在地マークを道路地図に重ね合わせて表示する機能である。この場合、車両の走行に伴って現在地の表示は地図上を移動し、地図は車両の位置に応じてスクロール表示される。このとき、車両の現在地を道路上にのせるマップマッチングが行われる。また、制御装置2は、地図データ入力器4から入力された地図データを記憶するメモリを備えている。
【0023】
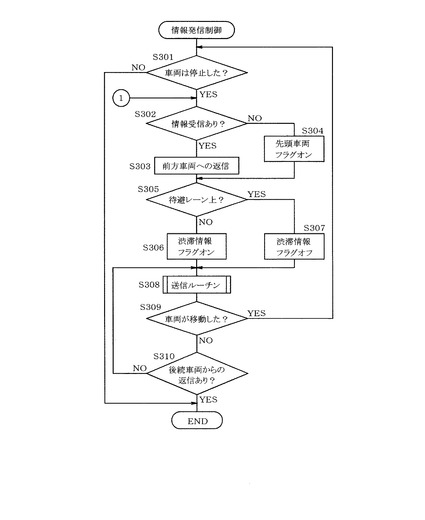
次に、図3、図4、図6および図7に基づいて、発信側車両における制御装置2によるナビゲーション装置1の制御方法について説明する。以下、説明中の車両は,すべて上述した車載ナビゲーション装置1を搭載しているものとする。尚、いずれの車両の制御装置2においても、制御の開始時において、後述する先頭車両フラグはオフされている。図6に示すように、最初、ナビゲーション装置1により経路案内されながら、片側複数の走行レーンを有する道路上を走行中の車両24が、車速センサ8により停止したことが検出されると(ステップS301)、車々間通信機19により前方に停止した他の車両から情報を受信したか否かが判定される(ステップS302)。
【0024】
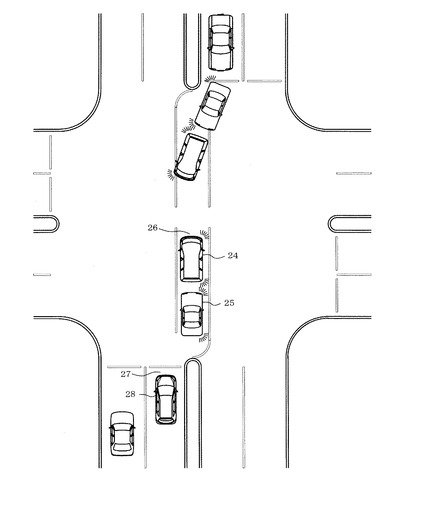
交差点において右折のために停止した車両24は、前方に停止する車両がないため情報を受信することもなく、自車両24が停止車両中の先頭車両であると判定され、当該車両24の制御装置2の先頭車両フラグがオンされる(ステップS304)。尚、この時点において、先頭車両24の後方にも停止車両はなく、先頭車両24は停止車両中の最後尾車両ともなる。次に、先頭車両24の制御装置2は、位置検出器3あるいはカメラ6により自車両24が右折のための待避レーン26(図6示)上にあるか否かを判定する(ステップS305)。図示するように、車両24は待避レーン26上にあり、追い越しレーン(直進レーン)27上にははみ出ていないため、未だ渋滞が発生することもなく、渋滞情報フラグをオフし(ステップS307)、ステップS308へと進む。
【0025】
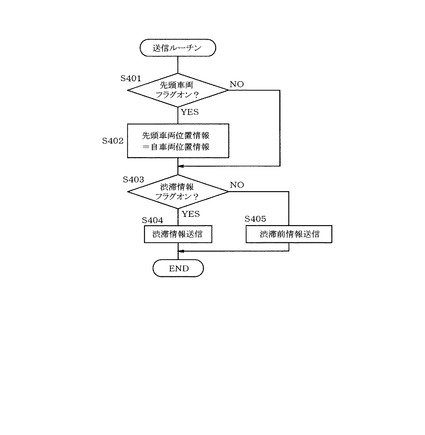
次に、図4に基づいて、先頭車両24の制御装置2による、ステップS308に示した送信ルーチンの実行方法について説明する。まず、先頭車両フラグがオンされていると判定されると(ステップS401)、制御装置2は前述したように、位置検出器3あるいはカメラ6により検出された自車両位置を先頭車両の位置とする(ステップS402)。次に、渋滞情報フラグがオンされていないと判定されると(ステップS403)、先頭車両24は車々間通信機19により、後続車両に対して渋滞前情報を送信する(ステップS405)。渋滞前情報は、位置検出器3あるいはカメラ6により検出された先頭車両24の位置、およびターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能により検出された先頭車両24の進行方向を含み、現在、渋滞は発生していないことを明示する情報である。尚、この時、先頭車両24が情報を発信する後続車両とは、自車両24の後方に新たに停止する車両、および自車両24の後方から走行してくる車両である。
【0026】
図3に戻って、先頭車両24の制御装置2は、車速センサ8あるいは位置検出器3により自車両24が移動したか否かを判定し(ステップS309)、自車両24が移動していれば、再びステップS301へと戻って、これまでと同様の制御を繰り返す。自車両24が移動していないと判定されると、前述したように、自車両24からの渋滞前情報の送信に対して、後続車両からの返信があるか否かを判定する(ステップS310)。後方に停止した車両がないため返信を受信しない場合は、図4に示した送信ルーチンへと戻り、後続車両への渋滞前情報の送信を継続する。
【0027】
先頭車両24から送信された渋滞前情報は、後方から交差点に向かって走行する車両によって受信される。しかしながら、車両24は待避レーン26上にあり、渋滞が発生していないため、情報を受信した走行車両の車載ナビゲーション装置1は、表示装置10を用いて、運転者に対して車両の交差点において車両24が停止していることを表す平面図を示すのみで、走行方法に関する指示を与えることはない。
【0028】
次に、図6に示したように、車両25が交差点を右折するために先頭車両24の後方に停止すると(ステップS301)、車両25は先頭車両24より送信された渋滞前情報の受信を開始する。先頭車両24からの受信をしたと判定されると(ステップS302)、停止車両25は、先頭車両フラグをオフしたまま、車々間通信機19を介して先頭車両24に対して返信を行う(ステップS303)。先頭車両24への返信は、自車両25が先頭車両24の後方に停止したことを先頭車両24に認識させることが可能な情報であり、先頭車両24は、停止車両25からの返信を受信すると情報発信制御ルーチンを終了し、これ以降、情報の発信は行わない(ステップS310)。
【0029】
一方、停止車両25の制御装置2は、前述の場合と同様に、自車両25が右折のための待避レーン26上にあるか否かを判定し(ステップS305)、待避レーン26上にあるため、渋滞情報フラグをオフし(ステップS307)、送信ルーチン(ステップS308)へと進む。
【0030】
次に、送信ルーチンにおいては、先頭車両フラグがオフされていると判定された後(ステップS401)、ステップS403において、渋滞情報フラグがオンされていないと判定され、停止車両25は停止車両中の最後尾車両として、車々間通信機19により、後続車両に対して渋滞前情報を送信する(ステップS405)。停止車両25により発信される渋滞前情報は、先頭車両24より受信した渋滞前情報に含まれていた先頭車両24の位置、位置検出器3あるいはカメラ6により検出された自車両25の位置、およびターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能により検出された自車両25の進行方向を含み、現在、渋滞は発生していないことを明示する情報である。
【0031】
このように、先頭車両24の後方に他車両25が停止した場合、先頭車両24の送信に対する停止車両25の返信を受信することにより先頭車両24は送信を停止し、代わって後方の停止車両25が先頭車両24から受信した先頭車両24の位置、位置検出器3あるいはカメラ6により検出された自車両25の位置、およびターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能により検出された自車両25の進行方向を含む情報を後続車両に発信する。尚、この時、停止車両25が情報を発信する後続車両とは、自車両25の後方に新たに停止する車両、および自車両25の後方から走行してくる車両である。
【0032】
図3に戻って、その後、停止車両25の制御装置2は、自車両25が移動したか否かを判定し(ステップS309)、自車両25が移動していれば、再びステップS301へと戻って、これまでと同様の制御を繰り返す。自車両25が移動していないと判定されると、前述したように、自車両25からの渋滞前情報の送信に対して、後続車両からの返信があるか否かを判定する(ステップS310)。後方に停止した車両がないため返信を受信しない場合は、図4に示した送信ルーチンへと戻り、後続車両への渋滞前情報の送信を継続する。
【0033】
停止車両25から送信された渋滞前情報は、後方から交差点に向かって走行する車両によって受信される。しかしながら、この時点における最後尾車両25は待避レーン26上にあり、渋滞が発生していないため、情報を受信した走行車両の車載ナビゲーション装置1は、表示装置10を用いて、運転者に対して車両の交差点において先頭車両24および車両25が停止していることを表す平面図を示すのみで、走行方法に関する指示を与えることはない。
【0034】
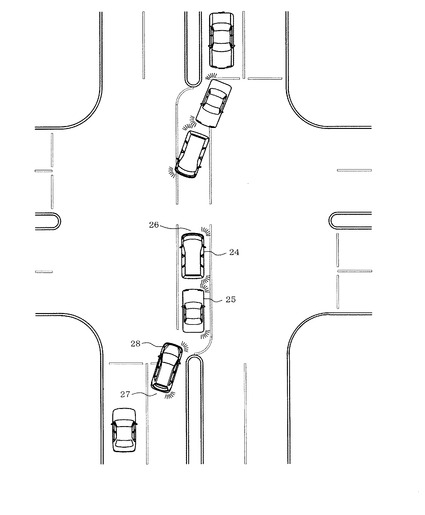
次に、図7に示したように、さらに、車両28が交差点を右折するために停止車両25の後方に停止すると(ステップS301)、車両28は停止車両25より送信された渋滞前情報の受信を開始する。停止車両25からの受信をしたと判定されると(ステップS302)、停止車両28は、先頭車両フラグをオフしたまま、車々間通信機19を介して停止車両25に対して返信を行う(ステップS303)。停止車両25は、新たな停止車両28からの返信を受信すると情報発信制御ルーチンを終了し、これ以降、情報の発信は行わない(ステップS310)。
一方、新たな停止車両28の制御装置2は、前述の場合と同様に、自車両28が右折のための待避レーン26上にあるか否かを判定し(ステップS305)、追い越しレーン27上にはみ出ているため渋滞が発生する恐れがあり、渋滞情報フラグをオンし(ステップS306)、送信ルーチン(ステップS308)へと進む。
【0035】
次に、送信ルーチンにおいては、先頭車両フラグがオフされていると判定されると(ステップS401)、ステップS403において、渋滞情報フラグがオンされていると判定され、停止車両28は停止車両中の最後尾車両として、車々間通信機19により、後続車両に対して渋滞情報を送信する(ステップS404)。新たな停止車両28により発信される渋滞情報は、前方の停止車両25より受信した渋滞前情報に含まれていた先頭車両24の位置、位置検出器3あるいはカメラ6により検出された自車両28の位置、およびターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能により検出された自車両28の進行方向を含み、渋滞が発生していることを明示する情報である。また、この最後尾車両28の位置情報には、車両28が停止している走行レーンを示す車線情報が含まれている。
【0036】
このように、情報を発信している停止車両25の後方に、さらに、他車両28が停止した場合、停止車両25の送信に対する新たな停止車両28の返信を受信することにより停止車両25は送信を停止し、代わって新たな停止車両28が前方車両25から受信した先頭車両24の位置、位置検出器3あるいはカメラ6により検出された自車両28の位置、およびターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能により検出された、自車両28の進行方向を含む情報を後続車両に発信する。
同様のことを順次継続していくことにより、常時、停止車両中の最後尾の車両から、先頭車両24の位置、自車両の位置、および自車両の進行方向を含む情報が後続車両に発信される。尚、この時、新たな停止車両28が情報を発信する後続車両とは、自車両28の後方に新たに停止する車両、および自車両28の後方から走行してくる車両である。
【0037】
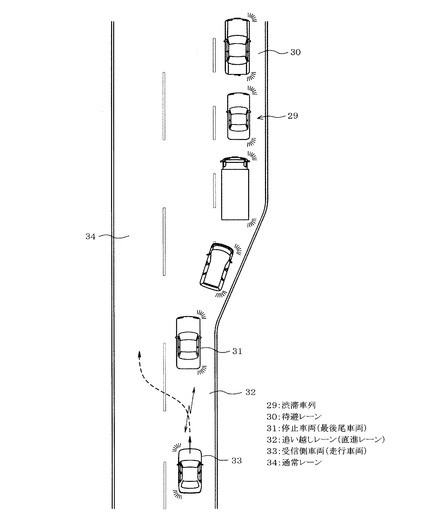
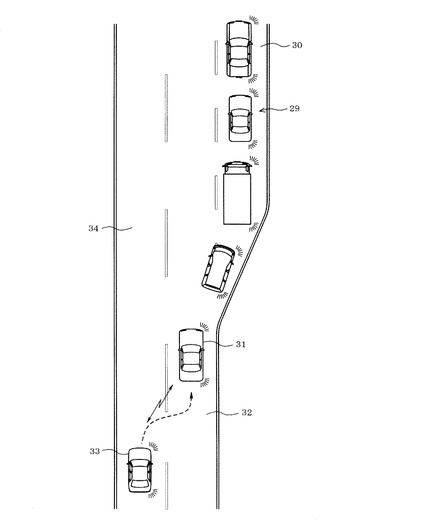
次に、図5および図8乃至図12に基づき、右折するために追い越しレーン(直進レーン)上にはみ出て停止した車両が渋滞情報を発信した場合に、それを受信した走行車両(受信側車両)において実行される車載ナビゲーション装置1の制御方法について説明する。図8に示すように、片側複数車線の走行レーンを有する道路上において、交差点において右折するために停止している車両により渋滞車列29が形成されている。渋滞車列29のうち大部分は右折のための待避レーン30上にあるが、最後尾の停止車両(発信側車両)31は追い越しレーン32まではみ出している。また、停止車両31は、前述したように最後尾車両として、後続車両に対して渋滞情報を発信している。車両31が発信する渋滞情報のうち、自車両31の位置情報には、車両31が停止している走行レーンを示す車線情報が含まれている。
【0038】
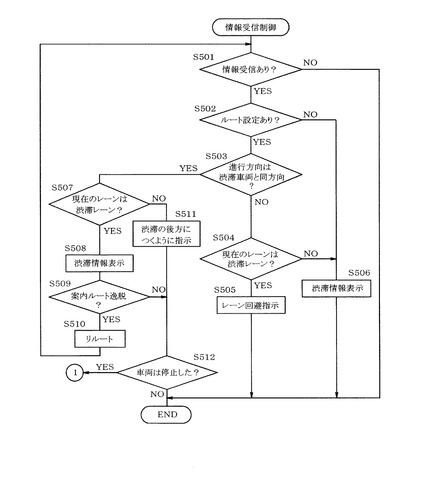
この状態において、停止している最後尾車両31よりも後方を走行している受信側車両33の制御装置2が、停止車両31が発信した渋滞情報を受信したと判定すると(ステップS501)、受信側車両33の車載ナビゲーション装置1においてルート設定され、経路案内が行われているか否かが判定される(ステップS502)。受信側車両33において経路案内が行われていると判定されると、ターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能に基づいて自車両33の進行方向を検出し、検出された自車両33の進行方向が、停止車両31の進路と同方向か否かが判定される(ステップS503)。
【0039】
停止車両31の進路は、渋滞情報に含まれる先頭車両の位置からわかる右折交差点と、停止車両31の進行方向情報とから特定される。あるいは、停止車両31の車載ナビゲーション装置1の経路案内機能によって検出してもよい。停止車両31の進路は、先頭車両の位置と停止車両31の進行方向とから「目前の交差点を右折」と決定されるため、受信側車両33の進行方向が例えば「目前の交差点を直進」である場合、自車両33の進行方向が停止車両31の進路と異なると判定される。この場合、停止車両31の渋滞情報に含まれる車線情報に基づき、現在、自車両33が走行するレーン32が、車両31が停止しているレーン32と同じか否かが判定される(ステップS504)。
【0040】
受信側車両33の走行するレーン32が、車両31が停止しているレーン32と同じ場合、そのまま進行すれば渋滞車列29に遭遇するため、制御装置2は運転者に対し、表示装置10およびスピーカ11を介して、現在走行中のレーン32から別のレーン(通常レーン)34に車線変更(レーン変更)し、渋滞車列29を回避するように指示する(ステップS505)。運転者に対する指示は、表示装置10において、道路上の待避レーン30および追い越しレーン32に渋滞車列29があることを示す平面図(図8示)を表示するとともに、スピーカ11により、例えば「前方が渋滞しています。車線変更して走行してください。」というふうに渋滞車列29を回避するように通知する。これにより、受信側車両33の運転者は、自車両33が渋滞車列29に遭遇する前に、通常レーン34に車線変更して渋滞車列29を回避できる(図8示)。その後、受信側車両33は停止することがなければ交差点から遠ざかり、制御ルーチンを終了する。
【0041】
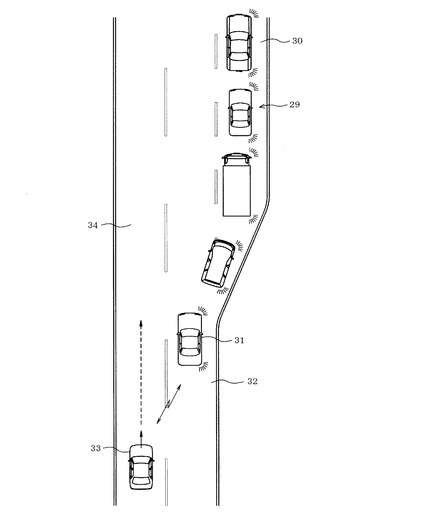
また、図9に示すように、受信側車両33の走行するレーン34が、車両31が停止しているレーン32と異なる場合(ステップS504)、そのまま進行しても渋滞車列29を回避できるため、ステップS506において、制御装置2は運転者に対し、表示装置10によって道路上の待避レーン30および追い越しレーン32に渋滞車列29があることを示す平面図(図9示)を表示するのみにとどめる。あるいは、スピーカ11により、例えば「右側車線が渋滞しています。このままの車線で走行してください。」というふうに通知してもよい。
【0042】
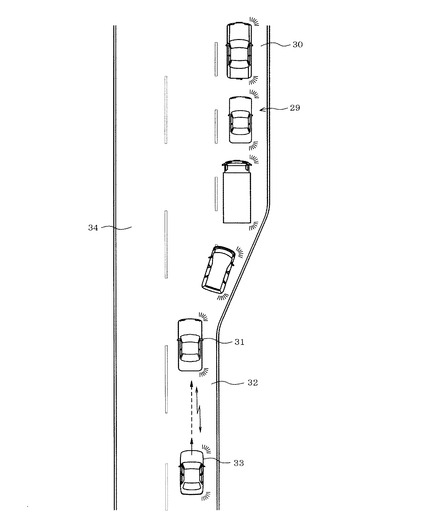
一方、ステップS503において、ターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能に基づいて検出された自車両33の進行方向が「目前の交差点を右折」であって、停止車両31の進路と同じと判定されると、ステップS507へと進んで、現在、自車両33が走行するレーンが、車両31が停止しているレーンと同じか否かが判定される。図10に示す場合、自車両33が走行するレーン32が、車両31が停止しているレーン32と同じと判定されると、自車両33はこのまま直進して、停止車両31の後方に停止すればよいから、制御装置2は運転者に対し、表示装置10によって、道路上の待避レーン30および追い越しレーン32に渋滞車列29があることを示す平面図(図10示)を表示するのみにとどめる。(ステップS508)。あるいは、スピーカ11により、例えば「前方に右折車両が停止しています。後方に続いて停止させてください。」というふうに通知してもよい。
【0043】
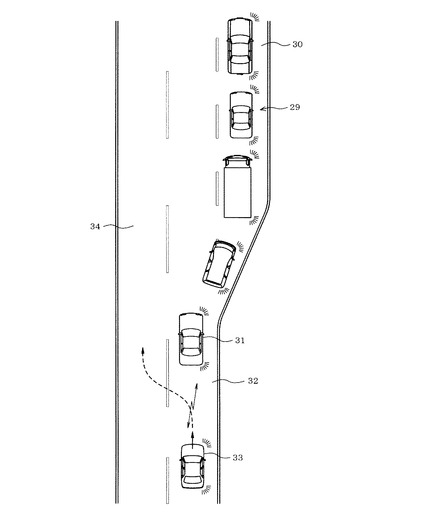
しかしながら、その後、図11に示すように、交差点を右折する予定であった受信側車両33が渋滞車列29の後方に並ぶことを嫌い、次の交差点以降において右折するために、車載ナビゲーション装置1によって案内されている経路を変更して、追い越しレーン32から通常レーン34に車線変更し、当該交差点を直進した場合、受信側車両33は案内経路を逸脱したと判定され(ステップS509)、車両33に搭載された車載ナビゲーション装置1は再度経路探索(リルート)を行った後(ステップS510)、ステップS501へと戻って、前述した場合と同様の制御が行われる。
【0044】
また、ステップS509において、車載ナビゲーション装置1によって案内されている経路を変更しなかったと判定されると、ステップS512へと進み、自車両33が停止車両31の後方に停止したか否かが判定される。停止車両1の後方に停止した場合、自車両33が新たな最後尾車両となるため、ステップS302(図3示)へと戻り、車両31に代わって車両33が渋滞情報を発信する。ステップS512において、車両33が停止車両31の後方に停止しなかったと判定された場合、受信側車両33の制御ルーチンは終了する。
【0045】
また、図12に示すように、交差点を右折する車両33が走行するレーン34が、車両31が停止しているレーン32と異なると判定されると(ステップS507)、自車両33はこのまま直進すると、渋滞車列29を通り越してしまうから、制御装置2は運転者に対し、表示装置10およびスピーカ11を介して、現在走行中のレーン34から別のレーン(追い越しレーン)32に車線変更し、渋滞車列29の最後尾に停止するように指示する(ステップS511)。運転者に対する指示は、表示装置10において、道路上の待避レーン30および追い越しレーン32に渋滞車列29があることを示す平面図(図12示)を表示するとともに、スピーカ11により、例えば「右折車両が停止しています。車線変更して後方につけて停止させてください。」というふうに通知する。
【0046】
これにより、受信側車両33の運転者は、自車両33が渋滞車列29を通り越してしまう前に、追い越しレーン32に車線変更して渋滞車列29の最後尾に停止することができる(図12示)。その後、停止車両31の後方に停止した場合、自車両33が新たな最後尾車両となるため、ステップS302(図3示)へと戻り、車両31に代わって車両33が渋滞情報を発信する(ステップS512)。ステップS512において、車両33が停止車両1の後方に停止しなかったと判定された場合、受信側車両33の制御ルーチンは終了する。
【0047】
また、受信側車両33の進行方向が、「目前の交差点を直進した後、次の交差点を右折」であった場合(図示せず)、受信側車両33の制御装置2は、渋滞情報に含まれる先頭車両の位置に基づいて、渋滞車列29が目前の交差点から始まっていると認識した場合には、自車両33の進行方向が停止車両31の進路と異なると判定し、自車両33に目前の交差点を直進させる。
【0048】
また、受信側車両33の進行方向が、「目前の交差点を直進した後、次の交差点を右折」であった場合、受信側車両33の制御装置2は、渋滞情報に含まれる先頭車両の位置に基づいて、渋滞車列29が次の交差点から始まり、目前の交差点まで延びていると認識した場合には、自車両33の進行方向が停止車両31の進路と同じと判定し、自車両33を渋滞車列29の最後尾に停止させる。
【0049】
また、図5に示したフローチャートのステップS502において、受信側車両33において、車載ナビゲーション装置1による経路案内が行われていないと判定された場合、制御装置2は運転者に対し、表示装置10によって道路上の待避レーン30および追い越しレーン32に渋滞車列29があることを示す平面図を表示するのみにとどめる。(ステップS506)。あるいは、表示装置10への表示に代えて、もしくは表示装置10への表示とともに、スピーカ11により「○○m(○個)先の交差点で右折待ち渋滞が発生しました。渋滞を回避する場合は、車線変更してください。」というふうに通知してもよい。これにより、受信側車両33の運転者は、自車両の運転計画および車両周囲の状況に基づき、早めに自車両33を運転操作することができる。
【0050】
本実施形態によれば、道路上において、走行中の車両33が渋滞車列29中の最後尾の車両31から渋滞情報を受信した場合、制御装置2は受信した情報、位置検出器3あるいはカメラ6により検出された自車両33の位置、およびターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能により検出された自車両33の進行方向に基づき、表示装置10およびスピーカ11を介して運転者に対し、停止車両31を回避して走行するか、あるいは停止車両31の後方に続いて停止させるかに関して指示する。これにより、運転者は、停止車両31に対する適切な運転方法を知ることができる。
【0051】
また、制御装置2は、走行する自車両33が現在走行しているレーンと渋滞車列29中の最後尾の車両31の位置するレーンとの異同、および走行する自車両33の進行方向に基づいて、運転者に対し走行するレーンを変更するか否かを指示する。これにより、運転者は、自車両33が渋滞を避けて直進するために、あるいは渋滞の最後尾につけるために、現在走行中のレーンを変更するべきか否かを知ることができる。
【0052】
また、渋滞車列中の最後尾の車両25の位置が、道路上の右折用待避レーン26上である場合、制御装置2は運転者への指示は行わない。渋滞車列中の最後尾の車両25の位置が、道路上の右折用待避レーン26上である場合、未だ、渋滞を引き起こしていないため、走行方法を指示する必要はなく、これにより、無駄な指示をすることを防ぐことができる。
【0053】
また、搭載された車載ナビゲーション装置1により経路案内されて、交差点を右折する予定であった走行車両33が、経路を変更して次の交差点以降において右折するために、渋滞車列中の最後尾の車両31の位置するレーン32からレーン変更して、右折予定していた交差点を直進した場合、車載ナビゲーション装置1は再度経路探索を行う。これにより、交差点上における右折から直進走行への変更に対応して、再探索後の経路による案内を早めに実行できる。
【0054】
<実施形態2>
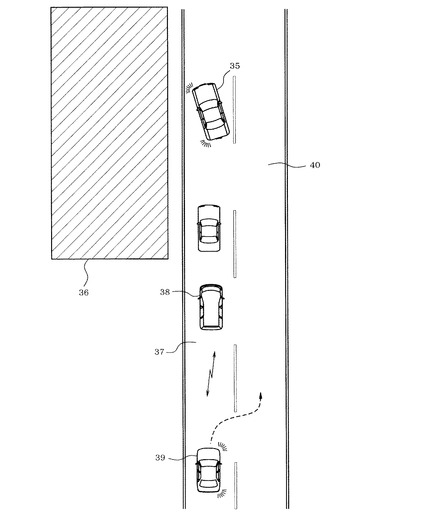
次に、図13に基づき、実施形態2による車載ナビゲーション装置1による制御方法について説明する。図13に示すように、車両35は道路の左沿道に位置する店舗36に入場するために、片側複数の走行レーンを有する道路の通常レーン37上に停止している。この場合、車両35が道路上で停止する理由としては、店舗36内の駐車場が満車であって、車両35がすぐに入場できないとか、店舗36の駐車場から他車が出場してくるため、車両35が道路上で待機している等が考えられる。
【0055】
車両35の後方には、車両35によりレーンをふさがれた複数の車両が停止しており、その最後尾の車両38から、上述したように渋滞情報が発信されている。車両38から発信された渋滞情報には、先頭車両35の位置、自車両38の現在位置および自車両38の進行方向が含まれており、これを直進車両39が受信している。直進車両39の制御装置2は、受信した渋滞情報に基づいて、表示装置10に道路上に停止車両があることを示す平面図(図13示)を表示するとともに、スピーカ11により、例えば「前方が渋滞しています。車線変更してください。」というふうに通知する。これにより、直進車両39は追い越しレーン40へ車線変更し、早期に渋滞を回避することができる。このように、本発明は交差点のみならず、道路から沿道への出入り等に伴う渋滞状態にも適用可能である。尚、停止車両35が道路の右沿道に位置する店舗に入場する時に発生する渋滞に対しても、上述した場合と同様である。
【0056】
<実施形態3>
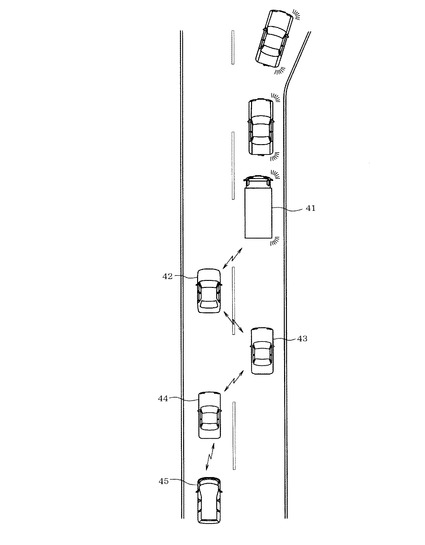
次に、図14に基づき、実施形態3による車載ナビゲーション装置1による制御方法について説明する。図14に示すように、本実施形態においては、道路上の渋滞車列の最後尾車両41から渋滞情報が発信され、渋滞情報を受信した走行中の車両42は、自車両42よりも後方を走行している他の走行車両43に対し渋滞情報を送信し、走行しながら情報を受信した車両43は、さらに、自車両43よりも後方を走行している他の車両44に対し渋滞情報を送信し、以降、走行車両44から、それよりも後方を走行する車両45に情報を順次伝達する(アドホック機能)。
【0057】
本実施形態によれば、走行車両42から、それよりも後方を走行する車両43〜45に情報を順次伝達することにより、走行中の車両42を介して、後方の遠方車両43〜45へも渋滞情報を送信することができ、後方の車両43〜45は渋滞に対して早期に対応することができる。
【0058】
<他の実施形態>
本発明は、上述した実施形態に限定されるものではなく、次のように変形または拡張することができる。
本発明は、交差点および車両の沿道への出入りによる渋滞のみでなく、鉄道の踏み切りあるいは交通事故等に起因する渋滞時にも適用可能である。
位置検出器3によって、車両の位置および存在するレーンが精度よく検出できれば、カメラ6は必ずしも必要ではない。
車両の進行方向は、車載ナビゲーション装置1の経路案内機能のみによって検出してもよい。
【図面の簡単な説明】
【0059】
【図1】実施形態1による発信側車両に搭載された車載ナビゲーション装置の構成を示すブロック図
【図2】受信側車両に搭載された車載ナビゲーション装置の構成を示すブロック図
【図3】発信側車両に搭載された車載ナビゲーション装置の制御装置による制御フローチャート
【図4】送信ルーチンによる制御フローチャート
【図5】受信側車両に搭載された車載ナビゲーション装置の制御装置による制御フローチャート
【図6】交差点の右折待避レーンに渋滞車列が発生したところを示した平面図
【図7】追い越しレーンにまで渋滞車列がはみ出したしたところを示した平面図
【図8】受信側車両が車線変更して交差点を直進する場合を示した平面図
【図9】受信側車両が車線変更せずに交差点を直進する場合を示した平面図
【図10】受信側車両が車線変更せずに交差点を右折する場合を示した平面図
【図11】受信側車両が経路変更して交差点を直進する場合を示した平面図
【図12】受信側車両が車線変更して交差点を右折する場合を示した平面図
【図13】実施形態2による道路上の車両の状態を示した平面図
【図14】実施形態3による道路上の車両の状態を示した平面図
【符号の説明】
【0060】
図面中、1は車載ナビゲーション装置、2は制御装置(先頭車両判定手段、走行指示手段)、3は位置検出器(現在地検出手段)、6はカメラ(現在地検出手段)、8は車速センサ(停車検出手段)、17はターンシグナルスイッチ(進路検出手段)、18は舵角センサ(進路検出手段)、19は車々間通信機(送受信手段)、24、35は先頭車両、26、30は待避レーン、27、32、40は追い越しレーン(直進レーン)、28、31、38、41は発信側車両(最後尾車両)、29は渋滞車列、33、39、42は受信側車両、34、37は通常レーンを示す。
【技術分野】
【0001】
本発明は、走行車両の運転者に対し、道路上の渋滞情報を提供する車両用走行支援システムに関する。
【背景技術】
【0002】
これまでにも、走行車両の運転者に対して、その運転を支援するために渋滞情報を提供する様々な従来技術があった。その一つとして、車両位置検出手段により、自車両の走行する車線を特定し、その車線上の渋滞情報を外部から送信される道路情報から入手するものがあった(例えば、特許文献1参照)。また、道路情報受信手段により受信した道路情報に基づき、表示装置に前方の渋滞レーンを示し、さらに、渋滞回避のためのレーンチェンジを促す車載装置に関するものもあった(例えば、特許文献2参照)。
このような、走行レーン前方における道路渋滞の有無を知らせるようなものにおいては、運転席からでは目視により確認できないような道路渋滞の存在を運転者が事前に知ることができ、走行車両が直進する場合には、渋滞を回避するために早めに対処することができる。
【0003】
しかしながら、その一方、この従来技術による渋滞情報では、運転者は自車両の走行しているレーンに渋滞があることを知りうるのみで、渋滞の原因といった情報を入手することはできず、渋滞に遭遇した車両の進行方向によっては、運転に必要な情報が不足することがあった。
通常、交差点において、右折車両が対向車の通過を待つために停止する待避レーンに多くの車両が入りこむと、停止した車列の後方の車両が待避レーンからはみ出して、直進レーンにまで並んで渋滞を引き起こすことは頻繁に見られる。このような渋滞に対して、交差点において右折したいと考えている車両が接近した場合、目前の渋滞が当該交差点において右折するための車両によるものか、あるいは別の原因によるものかがわからず、この渋滞の最後尾に自車両をつけるべきかどうかの判断ができないという不都合がある。
【0004】
また、渋滞に遭遇した車両の中には、間近の交差点は直進して通過し、その次の交差点において右折する予定のものもある。こういう車両にとっては、目前の渋滞が間近の交差点を右折する車両から始まっていれば、渋滞を回避する必要があり、その次の交差点を右折する車両から始まって、渋滞の車列がここまで延びているのであれば、自車両を渋滞の最後尾につける必要がある。このような状況においては、渋滞に遭遇した車両の運転者にとって、渋滞の最初の発生地点、あるいは渋滞車両の進行方向といった情報入手の必要性がある。
【特許文献1】特開2004−317386号公報
【特許文献2】特開平9−128686号公報
【発明の開示】
【発明が解決しようとする課題】
【0005】
このように、交差点等で右左折する車両にとっては、前方に渋滞が存在するということだけを知らせるものでは、この渋滞を避けるべきか、最後尾につくべきかを決定する情報としては不足している場合がある。
本発明は上記事情に鑑みてなされたものであり、その目的は、運転者に対し渋滞を避けるべきか、最後尾につくべきかを知らせることが可能な車両用走行支援システムを提供することにある。
【課題を解決するための手段】
【0006】
請求項1記載の車両用走行支援システムによれば、道路上において、走行中の車両が停止車両中の最後尾の車両から情報を受信した場合、走行指示手段は受信した情報、現在地検出手段により検出された自車両の位置、および進路検出手段により検出された自車両の進行方向に基づき、運転者に対し、停止車両を回避して走行するか、あるいは停止車両の後方に続いて停止させるかに関して指示する。これにより、運転者は、走行指示手段による指示により、停止車両に対する適切な運転方法を知ることができる。
【0007】
請求項2記載の車両用走行支援システムによれば、走行指示手段は、走行する自車両が現在走行しているレーンと停止車両中の最後尾の車両の位置するレーンとの異同、および走行する自車両の進行方向に基づいて、運転者に対し走行するレーンを変更するか否かを指示する。これにより、運転者は、走行指示手段による指示により、現在走行中のレーンを変更するべきか否かを知ることができる。
【0008】
請求項3記載の車両用走行支援システムによれば、停止車両中の最後尾の車両の位置が、道路上の右折用待避レーン上である場合、走行指示手段は運転者への指示は行わない。すなわち、停止車両中の最後尾の車両の位置が、道路上の右折用待避レーン上である場合、未だ、渋滞を引き起こしていないため、走行方法を指示する必要はなく、これにより、無駄な指示をすることを防ぐことができる。
【0009】
請求項4記載の車両用走行支援システムによれば、搭載された車載ナビゲーション装置により経路案内されて、交差点を右折する予定であった走行車両が、経路を変更して次の交差点以降において右折するために、停止車両中の最後尾の車両の位置するレーンからレーン変更して、右折予定していた交差点を直進した場合、車載ナビゲーション装置は再度経路探索を行う。これにより、交差点上における右折から直進走行への変更に対応して、再探索後の経路による案内を早めに実行できる。
【0010】
請求項5記載の車両用走行支援システムによれば、停止車両中の最後尾の車両から情報を受信した走行中の車両は、自車両よりも後方を走行している他の車両に対し、送受信手段により情報を送信し、走行しながら情報を受信した車両は、さらに、自車両よりも後方を走行している他の車両に対し、送受信手段により情報を送信し、以降、走行車両から、それよりも後方を走行する車両に情報を順次伝達する。これにより、走行中の車両を介して、後方の遠方車両へも渋滞情報を送信することができ、後方の車両は渋滞に対して早期に対応することができる。
【発明を実施するための最良の形態】
【0011】
<実施形態1>
以下、図1乃至図12に基づいて、本発明の実施形態1による車両用走行支援システムについて説明する。図1および図2は、車両用走行支援システムの構成を示すブロック図である。車両用走行支援システムは、発信側車両(渋滞により停止した車列の先頭車両あるいは最後尾車両で後続の車両に情報を発信する車両)と受信側車両(渋滞により停止した車両から情報を受信する走行車両)とを含む複数の車両によって構成されている。発信側車両および受信側車両は、基本的に同一のものであってよく、道路上での状況に応じて、同一の車両が発信側車両となったり、受信側車両となったりするものである。
【0012】
各車両には、それぞれ車載ナビゲーション装置1が搭載されている。車載ナビゲーション装置1は、発信側マイコンを主体として構成された制御装置2、車両の現在位置を検出するための位置検出器3、地図データ入力部4、操作スイッチ群5、カメラ6、カメラ6に接続された画像処理部7、車速センサ8、外部メモリ9、カラー液晶ディスプレイ等からなる表示装置10、スピーカ11が接続された音声コントローラ12、マイクロホン13から入力された音声を認識する音声認識装置14、リモコン15との間でコマンド等の送受信を行うリモコンセンサ16、車両のステアリングコラム(図示せず)内蔵されたターンシグナルスイッチ17、車両のステアリングホイールの切り角を検出する舵角センサ18、他車との間で車々間通信を行う車々間通信機19から構成されている。
【0013】
位置検出器3は本発明の現在地検出手段に該当し、車両方位を検出する地磁気センサ20、車両の回転角速度を検出するジャイロスコープ21、車両の走行距離を検出する距離センサ22、人工衛星からの送信電波に基づいて車両(自車)の現在位置を検出(測位)するGPS(Global Positioning System)のためのGPS受信機23を有している。各センサ20〜23は、それぞれ性質の異なる誤差を有している。このため、制御装置2は、各センサ20〜23の検出値を補間しながら用いることにより、車両の現在位置、進行方向、速度、走行距離、現在時刻等を高精度で検出するようになっている。位置検出器3は、道路上のレーンを判別するために、これに限定されるものではないが、検出精度が1m程度のものを使用することが望ましい。なお、精度によっては、位置検出器3を上述したセンサ20〜23の一部のみで構成してもよい。また、上述した舵角センサ18や各転動輪の車輪センサ等を用いてもよい。
【0014】
地図データ入力部4は、道路地図データ、目印データ、マップマッチング用データ、目的地データ(施設データベース)、交通情報を道路データに変換するためのテーブルデータなどの各種データを記録した地図データ記録メディアからデータを読み出すためのドライブ装置により構成されている。地図データ記録メディアには、DVD等の大容量記憶媒体を用いるのが一般的であるが、メモリカード、ハードディスク装置等の媒体を用いてもよい。
【0015】
外部操作手段である操作スイッチ群5は、表示装置10の画面の近傍に設けられたメカニカルスイッチや、表示装置10の画面上に設けられるタッチパネルを含んで構成されている。ユーザは、この操作スイッチ群5を用いて、車両の目的地、目的地の検索に必要な情報(目的地検索条件)、通過点などの入力、表示装置10の画面や表示態様の切り替え(地図縮尺変更、メニュー表示選択、経路探索、経路案内開始、現在位置修正、音量調整等)を行う各種のコマンドの入力を行い、ナビゲーション装置1を作動させることができる。一方、リモコン15には複数の操作スイッチが設けられており、スイッチ操作によりリモコン15からリモコンセンサ16を介して各種の指令信号が制御装置2に送信される。なお、操作スイッチ群5とリモコン15は、何れの操作によっても制御装置2に同様の機能を実行させることができる。
【0016】
カメラ6は位置検出器3とともに本発明の現在地検出手段に該当し、可視光領域や赤外線領域で撮像可能なCCDカメラやCMOSカメラ等により形成されている。カメラ6は車両のフロントウィンドウ付近に取り付けられ、車両前方を撮影することにより、自車両が現在位置する走行レーン(走行車線)を検出している。また、画像処理部7は制御装置2と接続され、カメラ6によって形成された画像データを処理して、制御装置2へと送信する。
【0017】
車速センサ8は本発明の停車検出手段に該当し、車両のトランスミッション(図示せず)に取り付けられており、トランスミッションのギヤ回転速度から車両速度を検出するとともに、車速が0となった場合に車両の停止を検出する。また、車速センサ8は、これ以外の、例えば車両の駆動輪あるいは従動輪の回転速度から車両速度を検出するもの等であってもよい。
【0018】
外部メモリ9は、フラッシュメモリカード等から構成されている。この外部メモリ9には、特定のデータ例えば経路案内時に制御装置2が設定した目的地までの経路のデータ、車両が通過した経路のデータ等が記憶される。表示装置10の画面には、車両の位置周辺の地図が各種縮尺で表示されるとともに、その表示に重ね合わせて、車両の現在位置と進行方向とを示す現在地マーク(ポインタ)が表示される。また、目的地までの経路案内の実行時には経路案内用の画面が表示され、ユーザが目的地の検索に必要な情報等を入力したり、目的地の検索や設定を行うための入力用の画面や、各種のメッセージ等も表示される。さらに、走行車両が、渋滞により停止した車両から受信した情報に基づき、渋滞車列を先頭車両の位置および最後尾車両の位置を明らかにして、地図上に表示することも行う。尚、車載ナビゲーション装置1による経路案内機能は、ターンシグナルスイッチ17および舵角センサ18とともに、本発明の進路検出手段に該当している。
【0019】
音声認識装置14は、マイクロホン13を介して入力した音声と内部に記憶する認識用の辞書データとを照合し、入力された音声を認識する。音声コントローラ12は、音声認識装置14を制御して音声認識結果を制御装置2に出力するとともに、認識された音声はスピーカ11を介してトークバック出力する。また、制御装置2からの音声出力指令に基づいて音声出力信号をスピーカ11に出力する。スピーカ11から出力される音声は、案内に関する音声、操作説明に関する音声、盗難防止機能の動作中であることを報知する音声、音声認識結果に応じたトークバック音声、および停止車両から受信した情報に基づいて、運転者に対して走行方法に関する指示をする指示音声などである。
【0020】
ターンシグナルスイッチ17は車両のステアリングコラム(図示せず)内に取り付けられており、本発明の進路検出手段に該当して車両の進行方向を検出する。車両の運転者がウィンカレバーを操作することによりターンシグナルスイッチ17がオンされると、車両が右折あるいは左折することが検出され、オフ状態にある場合、車両が直進することが検出される。
【0021】
舵角センサ18はターンシグナルスイッチ17とともに本発明の進路検出手段に該当し、運転者がステアリングホイールを操作することにより、その操舵量を検出でき、車両の進行方向をも検出することができる。車々間通信機19は本発明の送受信手段に該当し、他の車両の車々間通信機19との間で情報の送受信を行う。車々間通信機19は、これに限定されるものではないが、通信範囲が半径数百mのものを使用することが望ましい。
【0022】
制御装置2を構成するマイコンはCPU、メモリ(RAM、ROM、EEPROM、フラッシュメモリ等)、I/Oなどを備えており、本発明の先頭車両判定手段および走行指示手段に該当している。制御装置2は、走行経路に沿って移動可能なように、表示装置10の画面に現在地周辺の道路地図を表示するとともに、車両の現在位置と進行方向を示す現在地マークを道路地図に重ね合わせて表示する機能である。この場合、車両の走行に伴って現在地の表示は地図上を移動し、地図は車両の位置に応じてスクロール表示される。このとき、車両の現在地を道路上にのせるマップマッチングが行われる。また、制御装置2は、地図データ入力器4から入力された地図データを記憶するメモリを備えている。
【0023】
次に、図3、図4、図6および図7に基づいて、発信側車両における制御装置2によるナビゲーション装置1の制御方法について説明する。以下、説明中の車両は,すべて上述した車載ナビゲーション装置1を搭載しているものとする。尚、いずれの車両の制御装置2においても、制御の開始時において、後述する先頭車両フラグはオフされている。図6に示すように、最初、ナビゲーション装置1により経路案内されながら、片側複数の走行レーンを有する道路上を走行中の車両24が、車速センサ8により停止したことが検出されると(ステップS301)、車々間通信機19により前方に停止した他の車両から情報を受信したか否かが判定される(ステップS302)。
【0024】
交差点において右折のために停止した車両24は、前方に停止する車両がないため情報を受信することもなく、自車両24が停止車両中の先頭車両であると判定され、当該車両24の制御装置2の先頭車両フラグがオンされる(ステップS304)。尚、この時点において、先頭車両24の後方にも停止車両はなく、先頭車両24は停止車両中の最後尾車両ともなる。次に、先頭車両24の制御装置2は、位置検出器3あるいはカメラ6により自車両24が右折のための待避レーン26(図6示)上にあるか否かを判定する(ステップS305)。図示するように、車両24は待避レーン26上にあり、追い越しレーン(直進レーン)27上にははみ出ていないため、未だ渋滞が発生することもなく、渋滞情報フラグをオフし(ステップS307)、ステップS308へと進む。
【0025】
次に、図4に基づいて、先頭車両24の制御装置2による、ステップS308に示した送信ルーチンの実行方法について説明する。まず、先頭車両フラグがオンされていると判定されると(ステップS401)、制御装置2は前述したように、位置検出器3あるいはカメラ6により検出された自車両位置を先頭車両の位置とする(ステップS402)。次に、渋滞情報フラグがオンされていないと判定されると(ステップS403)、先頭車両24は車々間通信機19により、後続車両に対して渋滞前情報を送信する(ステップS405)。渋滞前情報は、位置検出器3あるいはカメラ6により検出された先頭車両24の位置、およびターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能により検出された先頭車両24の進行方向を含み、現在、渋滞は発生していないことを明示する情報である。尚、この時、先頭車両24が情報を発信する後続車両とは、自車両24の後方に新たに停止する車両、および自車両24の後方から走行してくる車両である。
【0026】
図3に戻って、先頭車両24の制御装置2は、車速センサ8あるいは位置検出器3により自車両24が移動したか否かを判定し(ステップS309)、自車両24が移動していれば、再びステップS301へと戻って、これまでと同様の制御を繰り返す。自車両24が移動していないと判定されると、前述したように、自車両24からの渋滞前情報の送信に対して、後続車両からの返信があるか否かを判定する(ステップS310)。後方に停止した車両がないため返信を受信しない場合は、図4に示した送信ルーチンへと戻り、後続車両への渋滞前情報の送信を継続する。
【0027】
先頭車両24から送信された渋滞前情報は、後方から交差点に向かって走行する車両によって受信される。しかしながら、車両24は待避レーン26上にあり、渋滞が発生していないため、情報を受信した走行車両の車載ナビゲーション装置1は、表示装置10を用いて、運転者に対して車両の交差点において車両24が停止していることを表す平面図を示すのみで、走行方法に関する指示を与えることはない。
【0028】
次に、図6に示したように、車両25が交差点を右折するために先頭車両24の後方に停止すると(ステップS301)、車両25は先頭車両24より送信された渋滞前情報の受信を開始する。先頭車両24からの受信をしたと判定されると(ステップS302)、停止車両25は、先頭車両フラグをオフしたまま、車々間通信機19を介して先頭車両24に対して返信を行う(ステップS303)。先頭車両24への返信は、自車両25が先頭車両24の後方に停止したことを先頭車両24に認識させることが可能な情報であり、先頭車両24は、停止車両25からの返信を受信すると情報発信制御ルーチンを終了し、これ以降、情報の発信は行わない(ステップS310)。
【0029】
一方、停止車両25の制御装置2は、前述の場合と同様に、自車両25が右折のための待避レーン26上にあるか否かを判定し(ステップS305)、待避レーン26上にあるため、渋滞情報フラグをオフし(ステップS307)、送信ルーチン(ステップS308)へと進む。
【0030】
次に、送信ルーチンにおいては、先頭車両フラグがオフされていると判定された後(ステップS401)、ステップS403において、渋滞情報フラグがオンされていないと判定され、停止車両25は停止車両中の最後尾車両として、車々間通信機19により、後続車両に対して渋滞前情報を送信する(ステップS405)。停止車両25により発信される渋滞前情報は、先頭車両24より受信した渋滞前情報に含まれていた先頭車両24の位置、位置検出器3あるいはカメラ6により検出された自車両25の位置、およびターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能により検出された自車両25の進行方向を含み、現在、渋滞は発生していないことを明示する情報である。
【0031】
このように、先頭車両24の後方に他車両25が停止した場合、先頭車両24の送信に対する停止車両25の返信を受信することにより先頭車両24は送信を停止し、代わって後方の停止車両25が先頭車両24から受信した先頭車両24の位置、位置検出器3あるいはカメラ6により検出された自車両25の位置、およびターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能により検出された自車両25の進行方向を含む情報を後続車両に発信する。尚、この時、停止車両25が情報を発信する後続車両とは、自車両25の後方に新たに停止する車両、および自車両25の後方から走行してくる車両である。
【0032】
図3に戻って、その後、停止車両25の制御装置2は、自車両25が移動したか否かを判定し(ステップS309)、自車両25が移動していれば、再びステップS301へと戻って、これまでと同様の制御を繰り返す。自車両25が移動していないと判定されると、前述したように、自車両25からの渋滞前情報の送信に対して、後続車両からの返信があるか否かを判定する(ステップS310)。後方に停止した車両がないため返信を受信しない場合は、図4に示した送信ルーチンへと戻り、後続車両への渋滞前情報の送信を継続する。
【0033】
停止車両25から送信された渋滞前情報は、後方から交差点に向かって走行する車両によって受信される。しかしながら、この時点における最後尾車両25は待避レーン26上にあり、渋滞が発生していないため、情報を受信した走行車両の車載ナビゲーション装置1は、表示装置10を用いて、運転者に対して車両の交差点において先頭車両24および車両25が停止していることを表す平面図を示すのみで、走行方法に関する指示を与えることはない。
【0034】
次に、図7に示したように、さらに、車両28が交差点を右折するために停止車両25の後方に停止すると(ステップS301)、車両28は停止車両25より送信された渋滞前情報の受信を開始する。停止車両25からの受信をしたと判定されると(ステップS302)、停止車両28は、先頭車両フラグをオフしたまま、車々間通信機19を介して停止車両25に対して返信を行う(ステップS303)。停止車両25は、新たな停止車両28からの返信を受信すると情報発信制御ルーチンを終了し、これ以降、情報の発信は行わない(ステップS310)。
一方、新たな停止車両28の制御装置2は、前述の場合と同様に、自車両28が右折のための待避レーン26上にあるか否かを判定し(ステップS305)、追い越しレーン27上にはみ出ているため渋滞が発生する恐れがあり、渋滞情報フラグをオンし(ステップS306)、送信ルーチン(ステップS308)へと進む。
【0035】
次に、送信ルーチンにおいては、先頭車両フラグがオフされていると判定されると(ステップS401)、ステップS403において、渋滞情報フラグがオンされていると判定され、停止車両28は停止車両中の最後尾車両として、車々間通信機19により、後続車両に対して渋滞情報を送信する(ステップS404)。新たな停止車両28により発信される渋滞情報は、前方の停止車両25より受信した渋滞前情報に含まれていた先頭車両24の位置、位置検出器3あるいはカメラ6により検出された自車両28の位置、およびターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能により検出された自車両28の進行方向を含み、渋滞が発生していることを明示する情報である。また、この最後尾車両28の位置情報には、車両28が停止している走行レーンを示す車線情報が含まれている。
【0036】
このように、情報を発信している停止車両25の後方に、さらに、他車両28が停止した場合、停止車両25の送信に対する新たな停止車両28の返信を受信することにより停止車両25は送信を停止し、代わって新たな停止車両28が前方車両25から受信した先頭車両24の位置、位置検出器3あるいはカメラ6により検出された自車両28の位置、およびターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能により検出された、自車両28の進行方向を含む情報を後続車両に発信する。
同様のことを順次継続していくことにより、常時、停止車両中の最後尾の車両から、先頭車両24の位置、自車両の位置、および自車両の進行方向を含む情報が後続車両に発信される。尚、この時、新たな停止車両28が情報を発信する後続車両とは、自車両28の後方に新たに停止する車両、および自車両28の後方から走行してくる車両である。
【0037】
次に、図5および図8乃至図12に基づき、右折するために追い越しレーン(直進レーン)上にはみ出て停止した車両が渋滞情報を発信した場合に、それを受信した走行車両(受信側車両)において実行される車載ナビゲーション装置1の制御方法について説明する。図8に示すように、片側複数車線の走行レーンを有する道路上において、交差点において右折するために停止している車両により渋滞車列29が形成されている。渋滞車列29のうち大部分は右折のための待避レーン30上にあるが、最後尾の停止車両(発信側車両)31は追い越しレーン32まではみ出している。また、停止車両31は、前述したように最後尾車両として、後続車両に対して渋滞情報を発信している。車両31が発信する渋滞情報のうち、自車両31の位置情報には、車両31が停止している走行レーンを示す車線情報が含まれている。
【0038】
この状態において、停止している最後尾車両31よりも後方を走行している受信側車両33の制御装置2が、停止車両31が発信した渋滞情報を受信したと判定すると(ステップS501)、受信側車両33の車載ナビゲーション装置1においてルート設定され、経路案内が行われているか否かが判定される(ステップS502)。受信側車両33において経路案内が行われていると判定されると、ターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能に基づいて自車両33の進行方向を検出し、検出された自車両33の進行方向が、停止車両31の進路と同方向か否かが判定される(ステップS503)。
【0039】
停止車両31の進路は、渋滞情報に含まれる先頭車両の位置からわかる右折交差点と、停止車両31の進行方向情報とから特定される。あるいは、停止車両31の車載ナビゲーション装置1の経路案内機能によって検出してもよい。停止車両31の進路は、先頭車両の位置と停止車両31の進行方向とから「目前の交差点を右折」と決定されるため、受信側車両33の進行方向が例えば「目前の交差点を直進」である場合、自車両33の進行方向が停止車両31の進路と異なると判定される。この場合、停止車両31の渋滞情報に含まれる車線情報に基づき、現在、自車両33が走行するレーン32が、車両31が停止しているレーン32と同じか否かが判定される(ステップS504)。
【0040】
受信側車両33の走行するレーン32が、車両31が停止しているレーン32と同じ場合、そのまま進行すれば渋滞車列29に遭遇するため、制御装置2は運転者に対し、表示装置10およびスピーカ11を介して、現在走行中のレーン32から別のレーン(通常レーン)34に車線変更(レーン変更)し、渋滞車列29を回避するように指示する(ステップS505)。運転者に対する指示は、表示装置10において、道路上の待避レーン30および追い越しレーン32に渋滞車列29があることを示す平面図(図8示)を表示するとともに、スピーカ11により、例えば「前方が渋滞しています。車線変更して走行してください。」というふうに渋滞車列29を回避するように通知する。これにより、受信側車両33の運転者は、自車両33が渋滞車列29に遭遇する前に、通常レーン34に車線変更して渋滞車列29を回避できる(図8示)。その後、受信側車両33は停止することがなければ交差点から遠ざかり、制御ルーチンを終了する。
【0041】
また、図9に示すように、受信側車両33の走行するレーン34が、車両31が停止しているレーン32と異なる場合(ステップS504)、そのまま進行しても渋滞車列29を回避できるため、ステップS506において、制御装置2は運転者に対し、表示装置10によって道路上の待避レーン30および追い越しレーン32に渋滞車列29があることを示す平面図(図9示)を表示するのみにとどめる。あるいは、スピーカ11により、例えば「右側車線が渋滞しています。このままの車線で走行してください。」というふうに通知してもよい。
【0042】
一方、ステップS503において、ターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能に基づいて検出された自車両33の進行方向が「目前の交差点を右折」であって、停止車両31の進路と同じと判定されると、ステップS507へと進んで、現在、自車両33が走行するレーンが、車両31が停止しているレーンと同じか否かが判定される。図10に示す場合、自車両33が走行するレーン32が、車両31が停止しているレーン32と同じと判定されると、自車両33はこのまま直進して、停止車両31の後方に停止すればよいから、制御装置2は運転者に対し、表示装置10によって、道路上の待避レーン30および追い越しレーン32に渋滞車列29があることを示す平面図(図10示)を表示するのみにとどめる。(ステップS508)。あるいは、スピーカ11により、例えば「前方に右折車両が停止しています。後方に続いて停止させてください。」というふうに通知してもよい。
【0043】
しかしながら、その後、図11に示すように、交差点を右折する予定であった受信側車両33が渋滞車列29の後方に並ぶことを嫌い、次の交差点以降において右折するために、車載ナビゲーション装置1によって案内されている経路を変更して、追い越しレーン32から通常レーン34に車線変更し、当該交差点を直進した場合、受信側車両33は案内経路を逸脱したと判定され(ステップS509)、車両33に搭載された車載ナビゲーション装置1は再度経路探索(リルート)を行った後(ステップS510)、ステップS501へと戻って、前述した場合と同様の制御が行われる。
【0044】
また、ステップS509において、車載ナビゲーション装置1によって案内されている経路を変更しなかったと判定されると、ステップS512へと進み、自車両33が停止車両31の後方に停止したか否かが判定される。停止車両1の後方に停止した場合、自車両33が新たな最後尾車両となるため、ステップS302(図3示)へと戻り、車両31に代わって車両33が渋滞情報を発信する。ステップS512において、車両33が停止車両31の後方に停止しなかったと判定された場合、受信側車両33の制御ルーチンは終了する。
【0045】
また、図12に示すように、交差点を右折する車両33が走行するレーン34が、車両31が停止しているレーン32と異なると判定されると(ステップS507)、自車両33はこのまま直進すると、渋滞車列29を通り越してしまうから、制御装置2は運転者に対し、表示装置10およびスピーカ11を介して、現在走行中のレーン34から別のレーン(追い越しレーン)32に車線変更し、渋滞車列29の最後尾に停止するように指示する(ステップS511)。運転者に対する指示は、表示装置10において、道路上の待避レーン30および追い越しレーン32に渋滞車列29があることを示す平面図(図12示)を表示するとともに、スピーカ11により、例えば「右折車両が停止しています。車線変更して後方につけて停止させてください。」というふうに通知する。
【0046】
これにより、受信側車両33の運転者は、自車両33が渋滞車列29を通り越してしまう前に、追い越しレーン32に車線変更して渋滞車列29の最後尾に停止することができる(図12示)。その後、停止車両31の後方に停止した場合、自車両33が新たな最後尾車両となるため、ステップS302(図3示)へと戻り、車両31に代わって車両33が渋滞情報を発信する(ステップS512)。ステップS512において、車両33が停止車両1の後方に停止しなかったと判定された場合、受信側車両33の制御ルーチンは終了する。
【0047】
また、受信側車両33の進行方向が、「目前の交差点を直進した後、次の交差点を右折」であった場合(図示せず)、受信側車両33の制御装置2は、渋滞情報に含まれる先頭車両の位置に基づいて、渋滞車列29が目前の交差点から始まっていると認識した場合には、自車両33の進行方向が停止車両31の進路と異なると判定し、自車両33に目前の交差点を直進させる。
【0048】
また、受信側車両33の進行方向が、「目前の交差点を直進した後、次の交差点を右折」であった場合、受信側車両33の制御装置2は、渋滞情報に含まれる先頭車両の位置に基づいて、渋滞車列29が次の交差点から始まり、目前の交差点まで延びていると認識した場合には、自車両33の進行方向が停止車両31の進路と同じと判定し、自車両33を渋滞車列29の最後尾に停止させる。
【0049】
また、図5に示したフローチャートのステップS502において、受信側車両33において、車載ナビゲーション装置1による経路案内が行われていないと判定された場合、制御装置2は運転者に対し、表示装置10によって道路上の待避レーン30および追い越しレーン32に渋滞車列29があることを示す平面図を表示するのみにとどめる。(ステップS506)。あるいは、表示装置10への表示に代えて、もしくは表示装置10への表示とともに、スピーカ11により「○○m(○個)先の交差点で右折待ち渋滞が発生しました。渋滞を回避する場合は、車線変更してください。」というふうに通知してもよい。これにより、受信側車両33の運転者は、自車両の運転計画および車両周囲の状況に基づき、早めに自車両33を運転操作することができる。
【0050】
本実施形態によれば、道路上において、走行中の車両33が渋滞車列29中の最後尾の車両31から渋滞情報を受信した場合、制御装置2は受信した情報、位置検出器3あるいはカメラ6により検出された自車両33の位置、およびターンシグナルスイッチ17または舵角センサ18もしくは車載ナビゲーション装置1の経路案内機能により検出された自車両33の進行方向に基づき、表示装置10およびスピーカ11を介して運転者に対し、停止車両31を回避して走行するか、あるいは停止車両31の後方に続いて停止させるかに関して指示する。これにより、運転者は、停止車両31に対する適切な運転方法を知ることができる。
【0051】
また、制御装置2は、走行する自車両33が現在走行しているレーンと渋滞車列29中の最後尾の車両31の位置するレーンとの異同、および走行する自車両33の進行方向に基づいて、運転者に対し走行するレーンを変更するか否かを指示する。これにより、運転者は、自車両33が渋滞を避けて直進するために、あるいは渋滞の最後尾につけるために、現在走行中のレーンを変更するべきか否かを知ることができる。
【0052】
また、渋滞車列中の最後尾の車両25の位置が、道路上の右折用待避レーン26上である場合、制御装置2は運転者への指示は行わない。渋滞車列中の最後尾の車両25の位置が、道路上の右折用待避レーン26上である場合、未だ、渋滞を引き起こしていないため、走行方法を指示する必要はなく、これにより、無駄な指示をすることを防ぐことができる。
【0053】
また、搭載された車載ナビゲーション装置1により経路案内されて、交差点を右折する予定であった走行車両33が、経路を変更して次の交差点以降において右折するために、渋滞車列中の最後尾の車両31の位置するレーン32からレーン変更して、右折予定していた交差点を直進した場合、車載ナビゲーション装置1は再度経路探索を行う。これにより、交差点上における右折から直進走行への変更に対応して、再探索後の経路による案内を早めに実行できる。
【0054】
<実施形態2>
次に、図13に基づき、実施形態2による車載ナビゲーション装置1による制御方法について説明する。図13に示すように、車両35は道路の左沿道に位置する店舗36に入場するために、片側複数の走行レーンを有する道路の通常レーン37上に停止している。この場合、車両35が道路上で停止する理由としては、店舗36内の駐車場が満車であって、車両35がすぐに入場できないとか、店舗36の駐車場から他車が出場してくるため、車両35が道路上で待機している等が考えられる。
【0055】
車両35の後方には、車両35によりレーンをふさがれた複数の車両が停止しており、その最後尾の車両38から、上述したように渋滞情報が発信されている。車両38から発信された渋滞情報には、先頭車両35の位置、自車両38の現在位置および自車両38の進行方向が含まれており、これを直進車両39が受信している。直進車両39の制御装置2は、受信した渋滞情報に基づいて、表示装置10に道路上に停止車両があることを示す平面図(図13示)を表示するとともに、スピーカ11により、例えば「前方が渋滞しています。車線変更してください。」というふうに通知する。これにより、直進車両39は追い越しレーン40へ車線変更し、早期に渋滞を回避することができる。このように、本発明は交差点のみならず、道路から沿道への出入り等に伴う渋滞状態にも適用可能である。尚、停止車両35が道路の右沿道に位置する店舗に入場する時に発生する渋滞に対しても、上述した場合と同様である。
【0056】
<実施形態3>
次に、図14に基づき、実施形態3による車載ナビゲーション装置1による制御方法について説明する。図14に示すように、本実施形態においては、道路上の渋滞車列の最後尾車両41から渋滞情報が発信され、渋滞情報を受信した走行中の車両42は、自車両42よりも後方を走行している他の走行車両43に対し渋滞情報を送信し、走行しながら情報を受信した車両43は、さらに、自車両43よりも後方を走行している他の車両44に対し渋滞情報を送信し、以降、走行車両44から、それよりも後方を走行する車両45に情報を順次伝達する(アドホック機能)。
【0057】
本実施形態によれば、走行車両42から、それよりも後方を走行する車両43〜45に情報を順次伝達することにより、走行中の車両42を介して、後方の遠方車両43〜45へも渋滞情報を送信することができ、後方の車両43〜45は渋滞に対して早期に対応することができる。
【0058】
<他の実施形態>
本発明は、上述した実施形態に限定されるものではなく、次のように変形または拡張することができる。
本発明は、交差点および車両の沿道への出入りによる渋滞のみでなく、鉄道の踏み切りあるいは交通事故等に起因する渋滞時にも適用可能である。
位置検出器3によって、車両の位置および存在するレーンが精度よく検出できれば、カメラ6は必ずしも必要ではない。
車両の進行方向は、車載ナビゲーション装置1の経路案内機能のみによって検出してもよい。
【図面の簡単な説明】
【0059】
【図1】実施形態1による発信側車両に搭載された車載ナビゲーション装置の構成を示すブロック図
【図2】受信側車両に搭載された車載ナビゲーション装置の構成を示すブロック図
【図3】発信側車両に搭載された車載ナビゲーション装置の制御装置による制御フローチャート
【図4】送信ルーチンによる制御フローチャート
【図5】受信側車両に搭載された車載ナビゲーション装置の制御装置による制御フローチャート
【図6】交差点の右折待避レーンに渋滞車列が発生したところを示した平面図
【図7】追い越しレーンにまで渋滞車列がはみ出したしたところを示した平面図
【図8】受信側車両が車線変更して交差点を直進する場合を示した平面図
【図9】受信側車両が車線変更せずに交差点を直進する場合を示した平面図
【図10】受信側車両が車線変更せずに交差点を右折する場合を示した平面図
【図11】受信側車両が経路変更して交差点を直進する場合を示した平面図
【図12】受信側車両が車線変更して交差点を右折する場合を示した平面図
【図13】実施形態2による道路上の車両の状態を示した平面図
【図14】実施形態3による道路上の車両の状態を示した平面図
【符号の説明】
【0060】
図面中、1は車載ナビゲーション装置、2は制御装置(先頭車両判定手段、走行指示手段)、3は位置検出器(現在地検出手段)、6はカメラ(現在地検出手段)、8は車速センサ(停車検出手段)、17はターンシグナルスイッチ(進路検出手段)、18は舵角センサ(進路検出手段)、19は車々間通信機(送受信手段)、24、35は先頭車両、26、30は待避レーン、27、32、40は追い越しレーン(直進レーン)、28、31、38、41は発信側車両(最後尾車両)、29は渋滞車列、33、39、42は受信側車両、34、37は通常レーンを示す。
【特許請求の範囲】
【請求項1】
車両の停止を検出する停車検出手段と、
車両の現在位置を検出する現在地検出手段と、
車両の進行方向を検出する進路検出手段と、
他の車両との間で情報の送受信を行う送受信手段と、
前記停車検出手段により、道路上に自車両が停止したことが検出された時、前記送受信手段により前方に停止した他の車両からの情報を受信しなかった場合には、自車両が停止車両中の先頭車両であると判定する先頭車両判定手段と、
走行中に他の車両から受信した情報に基づいて、運転者に対し、走行方法に関する指示を行う走行指示手段を各車両がそれぞれ備え、
道路上での停止時に、前記先頭車両判定手段により自車両が停止車両中の前記先頭車両であると判定された場合には、前記現在地検出手段により検出された自車両の位置、および前記進路検出手段により検出された自車両の進行方向を含む情報を後続車両に発信し、
前記先頭車両の後方に他車両が停止した場合、前記先頭車両の送信に対する停止車両の返信を受信することにより前記先頭車両は送信を停止し、代わって後方の停止車両が前記先頭車両から受信した前記先頭車両の位置、前記現在地検出手段により検出された自車両の位置、および前記進路検出手段により検出された自車両の進行方向を含む情報を後続車両に発信し、
さらに、発信車両の後方に他車両が停止した場合、発信車両の送信に対する停止車両の返信を受信することにより発信車両は送信を停止し、代わって新たな停止車両が前方車両から受信した前記先頭車両の位置、前記現在地検出手段により検出された自車両の位置、および前記進路検出手段により検出された自車両の進行方向を含む情報を後続車両に発信することを順次継続していくことにより、常時、停止車両中の最後尾の車両から、前記先頭車両の位置、自車両の位置、および自車両の進行方向を含む情報が後続車両に発信され、
道路上において、走行中の車両が停止車両中の最後尾の車両から情報を受信した場合、前記走行指示手段は受信した情報、前記現在地検出手段により検出された走行する自車両の位置、および前記進路検出手段により検出された自車両の進行方向に基づき、運転者に対し、停止車両を回避して走行するか、あるいは停止車両の後方に続いて停止させるかに関して指示することを特徴とする車両用走行支援システム。
【請求項2】
停止車両は片側複数の走行レーンを有する道路上に停止し、停止車両中の最後尾の車両からの最後尾車両の位置情報には、停止している走行レーンを示す車線情報が含まれており、前記走行指示手段は、走行車両が現在走行しているレーンと停止車両中の最後尾の車両の位置するレーンとの異同、および走行車両の進行方向に基づいて、運転者に対し走行するレーンを変更するか否かを指示することを特徴とする請求項1記載の車両用走行支援システム。
【請求項3】
前記現在地検出手段により検出された停止車両中の最後尾の車両の位置が、道路上の右折用待避レーン上である場合、前記走行指示手段は走行車両の運転者への指示は行わないことを特徴とする請求項1または2記載の車両用走行支援システム。
【請求項4】
搭載された車載ナビゲーション装置により経路案内されて、交差点を右折する予定であった走行車両が、経路を変更して次の交差点以降において右折するために、停止車両中の最後尾の車両の位置するレーンからレーン変更して、右折予定していた交差点を直進した場合、前記車載ナビゲーション装置は再度経路探索を行うことを特徴とする請求項1乃至3のいずれかに記載の車両用走行支援システム。
【請求項5】
停止車両中の最後尾の車両から情報を受信した走行中の車両は、自車両よりも後方を走行している他の車両に対し、前記送受信手段により情報を送信し、走行しながら情報を受信した車両は、さらに、自車両よりも後方を走行している他の車両に対し、前記送受信手段により情報を送信し、以降、走行車両から、それよりも後方を走行する車両に情報を順次伝達することを特徴とする請求項1乃至4のいずれかに記載の車両用走行支援システム。
【請求項1】
車両の停止を検出する停車検出手段と、
車両の現在位置を検出する現在地検出手段と、
車両の進行方向を検出する進路検出手段と、
他の車両との間で情報の送受信を行う送受信手段と、
前記停車検出手段により、道路上に自車両が停止したことが検出された時、前記送受信手段により前方に停止した他の車両からの情報を受信しなかった場合には、自車両が停止車両中の先頭車両であると判定する先頭車両判定手段と、
走行中に他の車両から受信した情報に基づいて、運転者に対し、走行方法に関する指示を行う走行指示手段を各車両がそれぞれ備え、
道路上での停止時に、前記先頭車両判定手段により自車両が停止車両中の前記先頭車両であると判定された場合には、前記現在地検出手段により検出された自車両の位置、および前記進路検出手段により検出された自車両の進行方向を含む情報を後続車両に発信し、
前記先頭車両の後方に他車両が停止した場合、前記先頭車両の送信に対する停止車両の返信を受信することにより前記先頭車両は送信を停止し、代わって後方の停止車両が前記先頭車両から受信した前記先頭車両の位置、前記現在地検出手段により検出された自車両の位置、および前記進路検出手段により検出された自車両の進行方向を含む情報を後続車両に発信し、
さらに、発信車両の後方に他車両が停止した場合、発信車両の送信に対する停止車両の返信を受信することにより発信車両は送信を停止し、代わって新たな停止車両が前方車両から受信した前記先頭車両の位置、前記現在地検出手段により検出された自車両の位置、および前記進路検出手段により検出された自車両の進行方向を含む情報を後続車両に発信することを順次継続していくことにより、常時、停止車両中の最後尾の車両から、前記先頭車両の位置、自車両の位置、および自車両の進行方向を含む情報が後続車両に発信され、
道路上において、走行中の車両が停止車両中の最後尾の車両から情報を受信した場合、前記走行指示手段は受信した情報、前記現在地検出手段により検出された走行する自車両の位置、および前記進路検出手段により検出された自車両の進行方向に基づき、運転者に対し、停止車両を回避して走行するか、あるいは停止車両の後方に続いて停止させるかに関して指示することを特徴とする車両用走行支援システム。
【請求項2】
停止車両は片側複数の走行レーンを有する道路上に停止し、停止車両中の最後尾の車両からの最後尾車両の位置情報には、停止している走行レーンを示す車線情報が含まれており、前記走行指示手段は、走行車両が現在走行しているレーンと停止車両中の最後尾の車両の位置するレーンとの異同、および走行車両の進行方向に基づいて、運転者に対し走行するレーンを変更するか否かを指示することを特徴とする請求項1記載の車両用走行支援システム。
【請求項3】
前記現在地検出手段により検出された停止車両中の最後尾の車両の位置が、道路上の右折用待避レーン上である場合、前記走行指示手段は走行車両の運転者への指示は行わないことを特徴とする請求項1または2記載の車両用走行支援システム。
【請求項4】
搭載された車載ナビゲーション装置により経路案内されて、交差点を右折する予定であった走行車両が、経路を変更して次の交差点以降において右折するために、停止車両中の最後尾の車両の位置するレーンからレーン変更して、右折予定していた交差点を直進した場合、前記車載ナビゲーション装置は再度経路探索を行うことを特徴とする請求項1乃至3のいずれかに記載の車両用走行支援システム。
【請求項5】
停止車両中の最後尾の車両から情報を受信した走行中の車両は、自車両よりも後方を走行している他の車両に対し、前記送受信手段により情報を送信し、走行しながら情報を受信した車両は、さらに、自車両よりも後方を走行している他の車両に対し、前記送受信手段により情報を送信し、以降、走行車両から、それよりも後方を走行する車両に情報を順次伝達することを特徴とする請求項1乃至4のいずれかに記載の車両用走行支援システム。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【公開番号】特開2009−31142(P2009−31142A)
【公開日】平成21年2月12日(2009.2.12)
【国際特許分類】
【出願番号】特願2007−195984(P2007−195984)
【出願日】平成19年7月27日(2007.7.27)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
【公開日】平成21年2月12日(2009.2.12)
【国際特許分類】
【出願日】平成19年7月27日(2007.7.27)
【出願人】(000004260)株式会社デンソー (27,639)
【Fターム(参考)】
[ Back to top ]