
車両用走行支援装置
【課題】 交差点右折時に自車右側から交差点に進入してくる障害物との接触を回避できる車両用走行支援装置を提供する。
【解決手段】 自車が演算された旋回経路を走行した場合のカメラ1の視界領域と死角領域との境界と死角移動物体の予測移動経路との交点を死角端点としたとき、交差点内で検出された自車位置における死角端点の位置を演算する死角端点位置演算部17と、演算された死角端点位置での死角移動物体の移動方向における死角端点の移動速度Vdを演算する死角端点移動速度演算部18と、記憶された死角移動物体の移動状態に基づいて、演算された死角端点位置における死角移動物体の移動速度Vnを検出する死角移動物体移動速度演算部19と、演算された死角端点移動速度Vdが演算された死角移動物体移動速度Vnよりも高くなるように自車速Vを制御する速度制御部20と、を備えた。
【解決手段】 自車が演算された旋回経路を走行した場合のカメラ1の視界領域と死角領域との境界と死角移動物体の予測移動経路との交点を死角端点としたとき、交差点内で検出された自車位置における死角端点の位置を演算する死角端点位置演算部17と、演算された死角端点位置での死角移動物体の移動方向における死角端点の移動速度Vdを演算する死角端点移動速度演算部18と、記憶された死角移動物体の移動状態に基づいて、演算された死角端点位置における死角移動物体の移動速度Vnを検出する死角移動物体移動速度演算部19と、演算された死角端点移動速度Vdが演算された死角移動物体移動速度Vnよりも高くなるように自車速Vを制御する速度制御部20と、を備えた。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用走行支援装置に関する。
【背景技術】
【0002】
従来の車両用走行支援装置としては、交差点進入時における障害物との接触を回避するために、車両のバンパに設けた広角レンズ付きビデオカメラで車両前方をモニタするものが知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−39218号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術にあっては、交差点進入時、自車の走行路が右折先道路よりも狭い場合、右折先道路の自車側のエリアが広いため、自車右側から交差点に進入する障害物の動きを把握しきれず、障害物と接触するおそれがあった。
本発明の目的は、交差点右折時に自車右側から交差点に進入してくる障害物との接触を回避できる車両用走行支援装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明では、交差点進入前に記憶した各障害物の移動状態に基づいて、自車が交差点で右折を開始したときに自車の右側であって撮像手段の死角領域に存在する最も速度が高い障害物を死角移動物体として選択し、自車の交差点右折時における死角端点の死角移動物体移動方向と同一方向の速度が死角移動物体の移動速度よりも高くなるように自車の速度を制御する。
【発明の効果】
【0006】
よって、本発明にあっては、右折時に撮像手段の死角から障害物が自車の前方に飛び出してくることが無いため、障害物との接触を回避できる。
【図面の簡単な説明】
【0007】
【図1】実施例1の車両用走行支援装置の構成図である。
【図2】実施例1のコントロールユニット4で実行される交差点右折時の車速制御処理の流れを示すフローチャートである。
【図3】実施例1の車速制御処理の動作を示す交差点右折時の模式図である。
【図4】実施例1の最低速度Vminと旋回速度限界値Vmaxとに応じた自車速Vの設定方法を示す図である。
【図5】実施例2の車両用走行支援装置の構成図である。
【図6】実施例2の最低速度Vminと旋回速度限界値Vmaxと停止限界速度Vlimとに応じた自車速Vの設定方法を示す図である。
【発明を実施するための形態】
【0008】
以下、本発明の車両用走行支援装置を実施するための形態を、図面に示し実施例に基づいて説明する。
〔実施例1〕
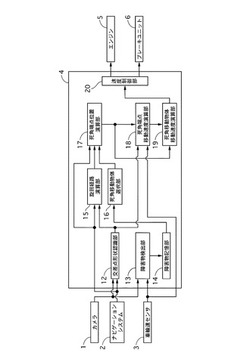
図1は、実施例1の車両用走行支援装置の構成図である。
実施例1の車両用走行支援装置は、カメラ(撮像手段)1と、ナビゲーションシステム(自車位置検出手段)2と、車輪速センサ3と、コントロールユニット4と、エンジン5と、ブレーキユニット6とを備える。
カメラ1は、自車の車体前端部(例えば、バンパ)に取り付けられ、自車前方を撮像する。
ナビゲーションシステム2は、GPS衛星からの信号を受信し、地図データベースを参照して自車の現在位置(自車位置)を検出すると共に、ドライバの設定した目標地点までの走行ルートを生成し、当該走行ルートを車室内に設けた図外のディスプレイに表示する。
【0009】
車輪速センサ3は、各車輪に設けられ、対応する車輪の速度を検出する。
コントロールユニット4は、カメラ1、ナビゲーションシステム2、車輪速センサ3等からの情報を入力し、走行支援として、自車がナビゲーションシステム2により生成された走行ルートに沿って走行するように、かつ、カメラ1により撮像された映像から走行路上に存在する障害物を検出し、障害物との接触を回避するように、前輪を転舵する転舵アクチュエータ(不図示)、エンジン5およびブレーキユニット6を駆動して自車を自動運転する。ドライバによる手動運転から自動運転への切り替えは、ドライバのスイッチ操作による行われる。また、自動運転の解除は、スイッチ操作またはドライバの操作介入により行われる。
実施例1では、自動運転による交差点右折時、自車右側から交差点に進入してくる障害物との接触を回避すべく、以下に示す制御ロジックに基づいてエンジン5およびブレーキユニット6を駆動し、自車の車速(自車速)を制御する。
ブレーキユニット6は、各車輪に設けられ、コントロールユニット4からの指令に応じて対応する車輪に制動力を発生させる。
【0010】
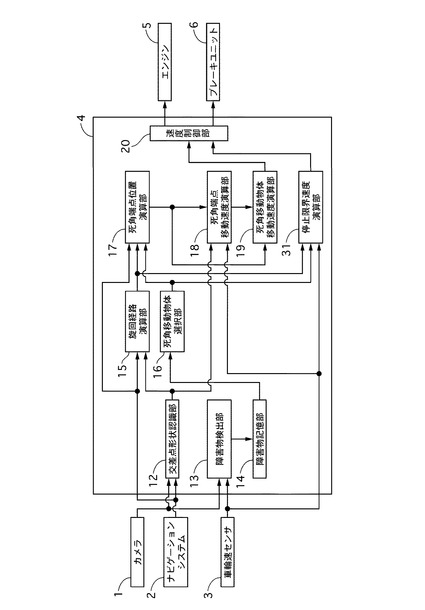
実施例1のコントロールユニット4は、交差点右折時における車速制御を実行するための構成として、交差点形状認識部(交差点形状認識手段)12と、障害物検出部(障害物検出手段)13と、障害物記憶部(障害物記憶手段)14と、旋回経路演算部(旋回経路演算手段)15と、死角移動物体選択部(死角移動物体選択手段)16と、死角端点位置演算部(死角端点位置演算手段)17と、死角端点移動速度演算部(死角端点移動速度演算手段)18と、死角移動物体移動速度演算部(死角移動物体移動速度演算手段)19と、速度制御部(速度制御手段)20と、を有する。
【0011】
交差点形状認識部12は、カメラ1からの映像と、ナビゲーションシステム2により検出された自車位置および地図データベースとに基づいて、自車前方に存在する交差点の形状を認識する。
障害物検出部13は、カメラ1からの映像と、車輪速センサ3から得られた各車輪速から求めた自車速とに基づいて、交差点接近中に自車の右側を自車と同一方向に移動する車両以外の各障害物の移動状態(位置、速度、加速度)を検出する。
障害物記憶部14は、障害物検出部13により検出された各障害物のうち、交差点までの距離が所定値以内、かつ、速度が所定値以上である障害物の移動状態を記憶する。
【0012】
旋回経路演算部15は、自車が前方に存在する交差点の右折を開始したとき、自車位置と交差点形状とに基づいて自車の旋回経路を演算する。
死角移動物体選択部16は、障害物記憶部14に記憶された各障害物の移動状態に基づいて各障害物の交差点進入速度を演算し、自車の交差点右折開始時に自車の右側であってカメラ1の死角領域に存在する最も速度が高い障害物を死角移動物体として選択する。カメラ1の死角領域は、自車周囲において、カメラ1の撮影可能範囲である前方視界領域(図3参照)を除く領域であって、カメラ1で撮影不能な領域をいう。
死角端点位置演算部17は、自車が旋回経路演算部15により演算された旋回経路を走行した場合のカメラ1の前方視界領域と死角領域との境界と、死角移動物体選択部16により選択された死角移動物体の予測移動経路との交点(または交点付近)を死角端点と定義したとき、交差点内で検出された自車位置における死角端点の位置を演算する。
【0013】
死角端点移動速度演算部18は、死角端点位置演算部17により演算された死角端点位置での死角移動物体の移動方向における死角端点の移動速度を演算する。死角移動物体の移動方向は、走行路の右側の道路端を延長した方向であり、移動速度は、旋回経路演算部15により演算された自車の旋回経路と、車輪速センサ3から得られた各車輪速から求めた自車速とに基づいて求めることができる。
死角移動物体移動速度演算部19は、障害物記憶部14に記憶された死角移動物体の移動状態(位置、速度、加速度)に基づいて、死角端点位置演算部17により演算された死角端点位置における死角移動物体の移動速度を検出する。
速度制御部20は、死角端点移動速度演算部18により演算された死角端点移動速度が、死角移動物体移動速度演算部19により演算された死角移動物体移動速度よりも高くなるように自車速を制御する。
【0014】
[交差点右折時の車速制御処理]
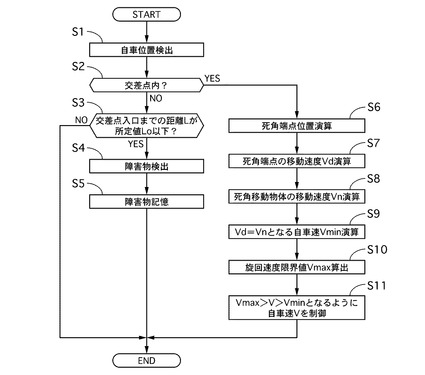
図2は、実施例1のコントロールユニット4で実行される交差点右折時の車速制御処理の流れを示すフローチャートであり、以下、各ステップについて説明する。なお、この処理は、自車前方に交差点が検出された場合に実行される。
ステップS1では、ナビゲーションシステム2において、自車位置を検出する。
ステップS2では、ナビゲーションシステム2において、交差点内であるか否かを判定し、YESの場合はステップS6へ進み、NOの場合はステップS3へ進む。
【0015】
ステップS3では、ナビゲーションシステム2において、交差点入口までの距離Lが所定値L0以下であるか否かを判定し、YESの場合はステップS4へ進み、NOの場合は本制御を終了する。
ステップS4では、障害物検出部13において、自車と進行方向が同じ障害物の位置p(交差点入口までの距離L)、速度vおよび加速度αを障害物毎に検出する。
ステップS5では、障害物記憶部14において、交差点入口までの距離Lが所定値L1(<L0)以下、かつ、速度vが所定値v1以上の障害物を記憶する。
【0016】
ステップS6では、死角端点位置演算部17において、現在の自車位置における死角端点位置を演算する。
ステップS7では、死角端点移動速度演算部18において、ステップS6で演算された死角端点の死角移動物体移動方向における移動速度Vdを演算する。
ステップS8では、死角移動物体選択部16において、自車の交差点右折開始時に自車の右側であってカメラ1の死角領域に存在する最も速度が高い障害物を死角移動物体として選択し、死角移動物体移動速度演算部19において、ステップS6で演算された死角端点での死角移動物体の移動速度Vnを演算する。
ステップS9では、速度制御部20において、Vd=Vnとなる自車の最低速度Vminを演算する。
【0017】
ステップS10では、速度制御部20において、旋回速度限界値Vmaxを最大横Gと自車の旋回経路とに基づいて演算する。最大横Gは、車両性能上、発生可能な最大横Gと、乗り心地上、発生可能な最大横Gとを比較して絶対値が小さな方を設定している。
ステップS11では、速度制御部20において、Vmax>V>Vminとなるように自車速Vを制御する。なお、Vmin≧Vmaxの場合は、V≦Vminとなるように自車速Vを制御する。
【0018】
次に、作用を説明する。
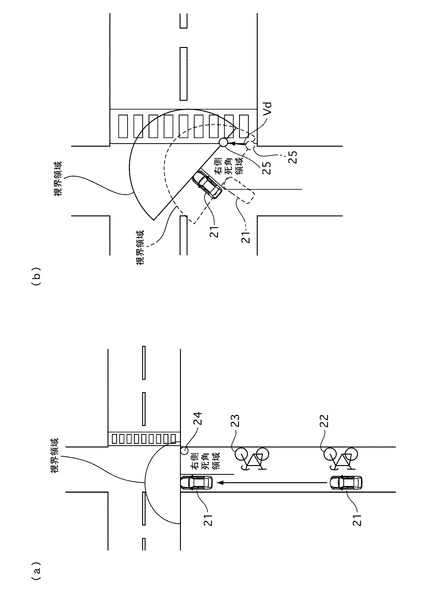
図3は、実施例1の車速制御処理の動作を示す交差点右折時の模式図であり、(a)は交差点接近中、(b)は交差点通過中を示す。
交差点接近中は、自車21と進行方向が同じ障害物22,23の位置、速度、加速度を検出し、記憶しておく。
続いて、交差点入口に到達したとき、右折時の旋回経路を想定すると共に、カメラ1の右側死角領域内の所定位置(図3(a)の点24)で速度が最も高くなる障害物を死角移動物体として選択する。
次に、自車21が想定した旋回経路を走行した場合の死角端点25の移動速度Vdを算出し、Vdが死角移動物体の移動速度Vnよりも高くなるように自車速Vを制御する。
【0019】
すなわち、実施例1の車両用走行支援装置では、自車が交差点で右折を開始したときにカメラ1の死角領域に存在する最も速度が高い障害物、すなわち、右折時にカメラ1の死角から自車の前方に飛び出してくる可能性が最も高い障害物を交差点進入前に記憶した各障害物の移動状態から推定し、右折時における死角端点の移動速度が当該障害物の移動速度よりも高くなるように自車速を制御する。
つまり、死角の移動速度が障害物の移動速度よりも高ければ、障害物が死角から自車の前方に飛び出してくることは無いため、自車の走行路が右折先道路よりも狭く、右折時に自車右側に死角が生じる場合であっても、カメラ1の死角に存在する障害物との接触を回避できる。
通常、自動運転中はカメラ1の映像から認識した障害物に対してのみ回避ロジックが作動するため、交差点右折時にカメラ1の右側死角領域から交差点に進入する障害物については自動運転による接触回避が困難であったが、実施例1の速度制御を適用することで、交差点進入時にカメラ1の死角に存在する障害物に対して接触を回避できる。
【0020】
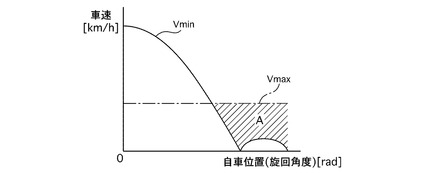
実施例1では、自車の最大横Gから旋回速度限界値Vmaxを求め、図4に示すように、Vmax>Vminとなる領域では、自車速Vが最低速度Vminと旋回速度限界値Vmaxとの間の範囲(図4の領域A)に収まるように制御する。
旋回速度限界値Vmaxを上限として自車速Vを制御することで、右折時に発生する横Gを発生可能な最大横G以下に抑えることができ、ドライバに与える違和感を抑制できる。
なお、図4に示すように、Vmin≧Vmaxとなる領域では、自車速VをVmin以下とする。
【0021】
次に、効果を説明する。
実施例1の車両用走行支援装置にあっては、以下に列挙する効果を奏する。
(1) 自車位置を検出するナビゲーションシステム2と、自車に搭載され、自車前方を撮像するカメラ1と、検出された自車位置と撮像された自車前方の映像に基づいて、自車前方に存在する交差点の形状を認識する交差点形状認識部12と、撮像された自車前方の映像に基づいて、交差点接近中に自車の右側を自車と同一方に移動する各障害物の移動状態を検出する障害物検出部13と、検出された各障害物の移動状態を記憶する障害物記憶部14と、自車の交差点右折開始時、検出された自車位置と認識された交差点形状とに基づいて自車の旋回経路を演算する旋回経路演算部15と、記憶された各障害物の移動状態に基づいて各障害物の交差点進入速度を演算し、自車の交差点右折開始時に自車の右側であってカメラ1の死角領域に存在する最も速度が高い障害物を死角移動物体として選択する死角移動物体選択部16と、自車が演算された旋回経路を走行した場合のカメラ1の視界領域と死角領域との境界と死角移動物体の予測移動経路との交点を死角端点としたとき、交差点内で検出された自車位置における死角端点の位置を演算する死角端点位置演算部17と、演算された死角端点位置での死角移動物体の移動方向における死角端点の移動速度Vdを演算する死角端点移動速度演算部18と、記憶された死角移動物体の移動状態に基づいて、演算された死角端点位置における死角移動物体の移動速度Vnを検出する死角移動物体移動速度演算部19と、演算された死角端点移動速度Vdが演算された死角移動物体移動速度Vnよりも高くなるように自車速Vを制御する速度制御部20と、を備えた。
これにより、自車の走行路が右折先道路よりも狭く、右折時に自車右側に死角が生じる場合であっても、死角から飛び出してくる障害物との接触を回避できる。
【0022】
(2) 速度制御部20は、旋回速度限界値Vmaxを上限として自車速Vを制御するため、右折時に発生する横Gを発生可能な最大横G以下に抑えることができ、ドライバに与える違和感を抑制できる。
【0023】
〔実施例2〕
実施例2は、停止可能限界速度を考慮する例である。
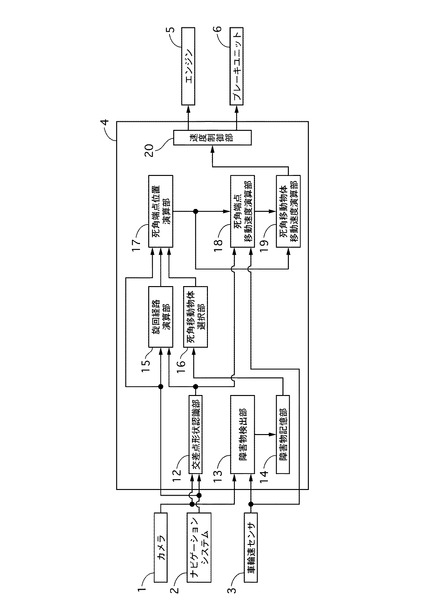
図5は、実施例2の車両用走行支援装置の構成図であり、実施例2では、図1に示した構成に対し、停止限界速度演算部(停止限界速度演算手段)31を追加した点で実施例1と異なる。
停止限界速度演算部31は、旋回経路演算部15により演算された旋回経路と、死角移動物体選択部16により選択された死角移動物体の予測移動経路とが交差する点で自車を停止させるために必要な自車速の上限値である停止限界速度Vlimを、交点と自車速とに基づいて演算する。
【0024】
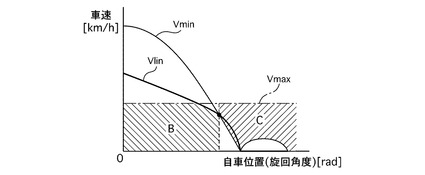
速度制御部20は、図6に示すように、交差点右折開始時からの自車位置(旋回角度)に応じた最低速度Vmin(Vd=Vnとなる自車の最低速度)と停止限界速度Vlimとの交点が旋回速度限界値Vmaxよりも低い場合、自車位置が交点に対応する位置に達するまでは停止限界速度Vlimと旋回速度限界値Vmaxのうち速度が低い方を上限として自車速Vを制御し、自車位置が交点に対応する位置を超えたときは旋回速度限界値Vmaxを上限として自車速Vを制御する。
よって、図6の例では、右折開始から自車位置がVminとVlimとの交点に対応する位置に達するまではVmaxとVlimのうち値が低い方を上限とする範囲(図6の領域B)に自車速Vを制御し、それ以降はVminとVmaxとの間の範囲(図6の領域C)に収まるように自車速Vを制御する。
【0025】
次に、作用を説明する。
実施例2では、停止限界速度Vlimを設定し、停止限界速度Vlimと最低速度Vminとが等しくなる自車位置で速度の制御範囲を切り替えることにより、障害物(死角移動物体)と交差する位置で自車が停止を停止させる速度制御と、障害物よりも先に交差点を通過する速度制御とをスムーズに切り替えることが可能である。
【0026】
次に、効果を説明する。
実施例2の車両用走行支援装置にあっては、実施例1の効果(1),(2)に加え、以下の効果を奏する。
(3) 演算された旋回経路と死角移動物体の予測移動経路とが交差する点で自車を停車させるために必要な自車速の上限値である停止限界速度Vlimを演算する停止限界速度演算部31を設け、速度制御部20は、交差点右折開始時からの自車位置(旋回角度)に応じた最低速度Vminと停止限界速度Vlimとの交点が旋回速度限界値Vmaxよりも低い場合、自車位置が交点に対応する位置に達するまでは停止限界速度Vlimと旋回速度限界値Vmaxのうち速度が低い方を上限として自車速Vを制御し、自車位置が交点に対応する位置を超えたときは旋回速度限界値Vmaxを上限として自車速Vを制御する。
これにより、障害物(死角移動物体)と交差する位置で自車が停止を停止させる速度制御と、障害物よりも先に交差点を通過する速度制御とをスムーズに切り替えることが可能である。
【0027】
(他の実施例)
以上、本発明を実施するための形態を、実施例に基づいて説明したが、本発明の具体的な構成は、実施例に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
実施例では、自動運転による交差点右折時について説明したが、本発明は、自車前方を撮像するカメラ(撮像手段)を備えた車両であれば、ドライバによる手動運転による交差点右折時にも適用でき、実施例と同様の作用効果を得ることができる。
【符号の説明】
【0028】
1 カメラ(撮像手段)
2 ナビゲーションシステム(自車位置検出手段)
3 車輪速センサ
4 コントロールユニット
5 エンジン
6 ブレーキユニット
12 交差点形状認識部(交差点形状認識手段)
13 障害物検出部(障害物検出手段)
14 障害物記憶部(障害物記憶手段)
15 旋回経路演算部(旋回経路演算手段)
16 死角移動物体選択部(死角移動物体選択手段)
17 死角端点位置演算部(死角端点位置演算手段)
18 死角端点移動速度演算部(死角端点移動速度演算手段)
19 死角移動物体移動速度演算部(死角移動物体移動速度演算手段)
20 速度制御部(速度制御手段)
31 停止限界速度演算部(停止限界速度演算手段)
【技術分野】
【0001】
本発明は、車両用走行支援装置に関する。
【背景技術】
【0002】
従来の車両用走行支援装置としては、交差点進入時における障害物との接触を回避するために、車両のバンパに設けた広角レンズ付きビデオカメラで車両前方をモニタするものが知られている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2001−39218号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上記従来技術にあっては、交差点進入時、自車の走行路が右折先道路よりも狭い場合、右折先道路の自車側のエリアが広いため、自車右側から交差点に進入する障害物の動きを把握しきれず、障害物と接触するおそれがあった。
本発明の目的は、交差点右折時に自車右側から交差点に進入してくる障害物との接触を回避できる車両用走行支援装置を提供することにある。
【課題を解決するための手段】
【0005】
本発明では、交差点進入前に記憶した各障害物の移動状態に基づいて、自車が交差点で右折を開始したときに自車の右側であって撮像手段の死角領域に存在する最も速度が高い障害物を死角移動物体として選択し、自車の交差点右折時における死角端点の死角移動物体移動方向と同一方向の速度が死角移動物体の移動速度よりも高くなるように自車の速度を制御する。
【発明の効果】
【0006】
よって、本発明にあっては、右折時に撮像手段の死角から障害物が自車の前方に飛び出してくることが無いため、障害物との接触を回避できる。
【図面の簡単な説明】
【0007】
【図1】実施例1の車両用走行支援装置の構成図である。
【図2】実施例1のコントロールユニット4で実行される交差点右折時の車速制御処理の流れを示すフローチャートである。
【図3】実施例1の車速制御処理の動作を示す交差点右折時の模式図である。
【図4】実施例1の最低速度Vminと旋回速度限界値Vmaxとに応じた自車速Vの設定方法を示す図である。
【図5】実施例2の車両用走行支援装置の構成図である。
【図6】実施例2の最低速度Vminと旋回速度限界値Vmaxと停止限界速度Vlimとに応じた自車速Vの設定方法を示す図である。
【発明を実施するための形態】
【0008】
以下、本発明の車両用走行支援装置を実施するための形態を、図面に示し実施例に基づいて説明する。
〔実施例1〕
図1は、実施例1の車両用走行支援装置の構成図である。
実施例1の車両用走行支援装置は、カメラ(撮像手段)1と、ナビゲーションシステム(自車位置検出手段)2と、車輪速センサ3と、コントロールユニット4と、エンジン5と、ブレーキユニット6とを備える。
カメラ1は、自車の車体前端部(例えば、バンパ)に取り付けられ、自車前方を撮像する。
ナビゲーションシステム2は、GPS衛星からの信号を受信し、地図データベースを参照して自車の現在位置(自車位置)を検出すると共に、ドライバの設定した目標地点までの走行ルートを生成し、当該走行ルートを車室内に設けた図外のディスプレイに表示する。
【0009】
車輪速センサ3は、各車輪に設けられ、対応する車輪の速度を検出する。
コントロールユニット4は、カメラ1、ナビゲーションシステム2、車輪速センサ3等からの情報を入力し、走行支援として、自車がナビゲーションシステム2により生成された走行ルートに沿って走行するように、かつ、カメラ1により撮像された映像から走行路上に存在する障害物を検出し、障害物との接触を回避するように、前輪を転舵する転舵アクチュエータ(不図示)、エンジン5およびブレーキユニット6を駆動して自車を自動運転する。ドライバによる手動運転から自動運転への切り替えは、ドライバのスイッチ操作による行われる。また、自動運転の解除は、スイッチ操作またはドライバの操作介入により行われる。
実施例1では、自動運転による交差点右折時、自車右側から交差点に進入してくる障害物との接触を回避すべく、以下に示す制御ロジックに基づいてエンジン5およびブレーキユニット6を駆動し、自車の車速(自車速)を制御する。
ブレーキユニット6は、各車輪に設けられ、コントロールユニット4からの指令に応じて対応する車輪に制動力を発生させる。
【0010】
実施例1のコントロールユニット4は、交差点右折時における車速制御を実行するための構成として、交差点形状認識部(交差点形状認識手段)12と、障害物検出部(障害物検出手段)13と、障害物記憶部(障害物記憶手段)14と、旋回経路演算部(旋回経路演算手段)15と、死角移動物体選択部(死角移動物体選択手段)16と、死角端点位置演算部(死角端点位置演算手段)17と、死角端点移動速度演算部(死角端点移動速度演算手段)18と、死角移動物体移動速度演算部(死角移動物体移動速度演算手段)19と、速度制御部(速度制御手段)20と、を有する。
【0011】
交差点形状認識部12は、カメラ1からの映像と、ナビゲーションシステム2により検出された自車位置および地図データベースとに基づいて、自車前方に存在する交差点の形状を認識する。
障害物検出部13は、カメラ1からの映像と、車輪速センサ3から得られた各車輪速から求めた自車速とに基づいて、交差点接近中に自車の右側を自車と同一方向に移動する車両以外の各障害物の移動状態(位置、速度、加速度)を検出する。
障害物記憶部14は、障害物検出部13により検出された各障害物のうち、交差点までの距離が所定値以内、かつ、速度が所定値以上である障害物の移動状態を記憶する。
【0012】
旋回経路演算部15は、自車が前方に存在する交差点の右折を開始したとき、自車位置と交差点形状とに基づいて自車の旋回経路を演算する。
死角移動物体選択部16は、障害物記憶部14に記憶された各障害物の移動状態に基づいて各障害物の交差点進入速度を演算し、自車の交差点右折開始時に自車の右側であってカメラ1の死角領域に存在する最も速度が高い障害物を死角移動物体として選択する。カメラ1の死角領域は、自車周囲において、カメラ1の撮影可能範囲である前方視界領域(図3参照)を除く領域であって、カメラ1で撮影不能な領域をいう。
死角端点位置演算部17は、自車が旋回経路演算部15により演算された旋回経路を走行した場合のカメラ1の前方視界領域と死角領域との境界と、死角移動物体選択部16により選択された死角移動物体の予測移動経路との交点(または交点付近)を死角端点と定義したとき、交差点内で検出された自車位置における死角端点の位置を演算する。
【0013】
死角端点移動速度演算部18は、死角端点位置演算部17により演算された死角端点位置での死角移動物体の移動方向における死角端点の移動速度を演算する。死角移動物体の移動方向は、走行路の右側の道路端を延長した方向であり、移動速度は、旋回経路演算部15により演算された自車の旋回経路と、車輪速センサ3から得られた各車輪速から求めた自車速とに基づいて求めることができる。
死角移動物体移動速度演算部19は、障害物記憶部14に記憶された死角移動物体の移動状態(位置、速度、加速度)に基づいて、死角端点位置演算部17により演算された死角端点位置における死角移動物体の移動速度を検出する。
速度制御部20は、死角端点移動速度演算部18により演算された死角端点移動速度が、死角移動物体移動速度演算部19により演算された死角移動物体移動速度よりも高くなるように自車速を制御する。
【0014】
[交差点右折時の車速制御処理]
図2は、実施例1のコントロールユニット4で実行される交差点右折時の車速制御処理の流れを示すフローチャートであり、以下、各ステップについて説明する。なお、この処理は、自車前方に交差点が検出された場合に実行される。
ステップS1では、ナビゲーションシステム2において、自車位置を検出する。
ステップS2では、ナビゲーションシステム2において、交差点内であるか否かを判定し、YESの場合はステップS6へ進み、NOの場合はステップS3へ進む。
【0015】
ステップS3では、ナビゲーションシステム2において、交差点入口までの距離Lが所定値L0以下であるか否かを判定し、YESの場合はステップS4へ進み、NOの場合は本制御を終了する。
ステップS4では、障害物検出部13において、自車と進行方向が同じ障害物の位置p(交差点入口までの距離L)、速度vおよび加速度αを障害物毎に検出する。
ステップS5では、障害物記憶部14において、交差点入口までの距離Lが所定値L1(<L0)以下、かつ、速度vが所定値v1以上の障害物を記憶する。
【0016】
ステップS6では、死角端点位置演算部17において、現在の自車位置における死角端点位置を演算する。
ステップS7では、死角端点移動速度演算部18において、ステップS6で演算された死角端点の死角移動物体移動方向における移動速度Vdを演算する。
ステップS8では、死角移動物体選択部16において、自車の交差点右折開始時に自車の右側であってカメラ1の死角領域に存在する最も速度が高い障害物を死角移動物体として選択し、死角移動物体移動速度演算部19において、ステップS6で演算された死角端点での死角移動物体の移動速度Vnを演算する。
ステップS9では、速度制御部20において、Vd=Vnとなる自車の最低速度Vminを演算する。
【0017】
ステップS10では、速度制御部20において、旋回速度限界値Vmaxを最大横Gと自車の旋回経路とに基づいて演算する。最大横Gは、車両性能上、発生可能な最大横Gと、乗り心地上、発生可能な最大横Gとを比較して絶対値が小さな方を設定している。
ステップS11では、速度制御部20において、Vmax>V>Vminとなるように自車速Vを制御する。なお、Vmin≧Vmaxの場合は、V≦Vminとなるように自車速Vを制御する。
【0018】
次に、作用を説明する。
図3は、実施例1の車速制御処理の動作を示す交差点右折時の模式図であり、(a)は交差点接近中、(b)は交差点通過中を示す。
交差点接近中は、自車21と進行方向が同じ障害物22,23の位置、速度、加速度を検出し、記憶しておく。
続いて、交差点入口に到達したとき、右折時の旋回経路を想定すると共に、カメラ1の右側死角領域内の所定位置(図3(a)の点24)で速度が最も高くなる障害物を死角移動物体として選択する。
次に、自車21が想定した旋回経路を走行した場合の死角端点25の移動速度Vdを算出し、Vdが死角移動物体の移動速度Vnよりも高くなるように自車速Vを制御する。
【0019】
すなわち、実施例1の車両用走行支援装置では、自車が交差点で右折を開始したときにカメラ1の死角領域に存在する最も速度が高い障害物、すなわち、右折時にカメラ1の死角から自車の前方に飛び出してくる可能性が最も高い障害物を交差点進入前に記憶した各障害物の移動状態から推定し、右折時における死角端点の移動速度が当該障害物の移動速度よりも高くなるように自車速を制御する。
つまり、死角の移動速度が障害物の移動速度よりも高ければ、障害物が死角から自車の前方に飛び出してくることは無いため、自車の走行路が右折先道路よりも狭く、右折時に自車右側に死角が生じる場合であっても、カメラ1の死角に存在する障害物との接触を回避できる。
通常、自動運転中はカメラ1の映像から認識した障害物に対してのみ回避ロジックが作動するため、交差点右折時にカメラ1の右側死角領域から交差点に進入する障害物については自動運転による接触回避が困難であったが、実施例1の速度制御を適用することで、交差点進入時にカメラ1の死角に存在する障害物に対して接触を回避できる。
【0020】
実施例1では、自車の最大横Gから旋回速度限界値Vmaxを求め、図4に示すように、Vmax>Vminとなる領域では、自車速Vが最低速度Vminと旋回速度限界値Vmaxとの間の範囲(図4の領域A)に収まるように制御する。
旋回速度限界値Vmaxを上限として自車速Vを制御することで、右折時に発生する横Gを発生可能な最大横G以下に抑えることができ、ドライバに与える違和感を抑制できる。
なお、図4に示すように、Vmin≧Vmaxとなる領域では、自車速VをVmin以下とする。
【0021】
次に、効果を説明する。
実施例1の車両用走行支援装置にあっては、以下に列挙する効果を奏する。
(1) 自車位置を検出するナビゲーションシステム2と、自車に搭載され、自車前方を撮像するカメラ1と、検出された自車位置と撮像された自車前方の映像に基づいて、自車前方に存在する交差点の形状を認識する交差点形状認識部12と、撮像された自車前方の映像に基づいて、交差点接近中に自車の右側を自車と同一方に移動する各障害物の移動状態を検出する障害物検出部13と、検出された各障害物の移動状態を記憶する障害物記憶部14と、自車の交差点右折開始時、検出された自車位置と認識された交差点形状とに基づいて自車の旋回経路を演算する旋回経路演算部15と、記憶された各障害物の移動状態に基づいて各障害物の交差点進入速度を演算し、自車の交差点右折開始時に自車の右側であってカメラ1の死角領域に存在する最も速度が高い障害物を死角移動物体として選択する死角移動物体選択部16と、自車が演算された旋回経路を走行した場合のカメラ1の視界領域と死角領域との境界と死角移動物体の予測移動経路との交点を死角端点としたとき、交差点内で検出された自車位置における死角端点の位置を演算する死角端点位置演算部17と、演算された死角端点位置での死角移動物体の移動方向における死角端点の移動速度Vdを演算する死角端点移動速度演算部18と、記憶された死角移動物体の移動状態に基づいて、演算された死角端点位置における死角移動物体の移動速度Vnを検出する死角移動物体移動速度演算部19と、演算された死角端点移動速度Vdが演算された死角移動物体移動速度Vnよりも高くなるように自車速Vを制御する速度制御部20と、を備えた。
これにより、自車の走行路が右折先道路よりも狭く、右折時に自車右側に死角が生じる場合であっても、死角から飛び出してくる障害物との接触を回避できる。
【0022】
(2) 速度制御部20は、旋回速度限界値Vmaxを上限として自車速Vを制御するため、右折時に発生する横Gを発生可能な最大横G以下に抑えることができ、ドライバに与える違和感を抑制できる。
【0023】
〔実施例2〕
実施例2は、停止可能限界速度を考慮する例である。
図5は、実施例2の車両用走行支援装置の構成図であり、実施例2では、図1に示した構成に対し、停止限界速度演算部(停止限界速度演算手段)31を追加した点で実施例1と異なる。
停止限界速度演算部31は、旋回経路演算部15により演算された旋回経路と、死角移動物体選択部16により選択された死角移動物体の予測移動経路とが交差する点で自車を停止させるために必要な自車速の上限値である停止限界速度Vlimを、交点と自車速とに基づいて演算する。
【0024】
速度制御部20は、図6に示すように、交差点右折開始時からの自車位置(旋回角度)に応じた最低速度Vmin(Vd=Vnとなる自車の最低速度)と停止限界速度Vlimとの交点が旋回速度限界値Vmaxよりも低い場合、自車位置が交点に対応する位置に達するまでは停止限界速度Vlimと旋回速度限界値Vmaxのうち速度が低い方を上限として自車速Vを制御し、自車位置が交点に対応する位置を超えたときは旋回速度限界値Vmaxを上限として自車速Vを制御する。
よって、図6の例では、右折開始から自車位置がVminとVlimとの交点に対応する位置に達するまではVmaxとVlimのうち値が低い方を上限とする範囲(図6の領域B)に自車速Vを制御し、それ以降はVminとVmaxとの間の範囲(図6の領域C)に収まるように自車速Vを制御する。
【0025】
次に、作用を説明する。
実施例2では、停止限界速度Vlimを設定し、停止限界速度Vlimと最低速度Vminとが等しくなる自車位置で速度の制御範囲を切り替えることにより、障害物(死角移動物体)と交差する位置で自車が停止を停止させる速度制御と、障害物よりも先に交差点を通過する速度制御とをスムーズに切り替えることが可能である。
【0026】
次に、効果を説明する。
実施例2の車両用走行支援装置にあっては、実施例1の効果(1),(2)に加え、以下の効果を奏する。
(3) 演算された旋回経路と死角移動物体の予測移動経路とが交差する点で自車を停車させるために必要な自車速の上限値である停止限界速度Vlimを演算する停止限界速度演算部31を設け、速度制御部20は、交差点右折開始時からの自車位置(旋回角度)に応じた最低速度Vminと停止限界速度Vlimとの交点が旋回速度限界値Vmaxよりも低い場合、自車位置が交点に対応する位置に達するまでは停止限界速度Vlimと旋回速度限界値Vmaxのうち速度が低い方を上限として自車速Vを制御し、自車位置が交点に対応する位置を超えたときは旋回速度限界値Vmaxを上限として自車速Vを制御する。
これにより、障害物(死角移動物体)と交差する位置で自車が停止を停止させる速度制御と、障害物よりも先に交差点を通過する速度制御とをスムーズに切り替えることが可能である。
【0027】
(他の実施例)
以上、本発明を実施するための形態を、実施例に基づいて説明したが、本発明の具体的な構成は、実施例に限定されるものではなく、発明の要旨を逸脱しない範囲の設計変更等があっても本発明に含まれる。
実施例では、自動運転による交差点右折時について説明したが、本発明は、自車前方を撮像するカメラ(撮像手段)を備えた車両であれば、ドライバによる手動運転による交差点右折時にも適用でき、実施例と同様の作用効果を得ることができる。
【符号の説明】
【0028】
1 カメラ(撮像手段)
2 ナビゲーションシステム(自車位置検出手段)
3 車輪速センサ
4 コントロールユニット
5 エンジン
6 ブレーキユニット
12 交差点形状認識部(交差点形状認識手段)
13 障害物検出部(障害物検出手段)
14 障害物記憶部(障害物記憶手段)
15 旋回経路演算部(旋回経路演算手段)
16 死角移動物体選択部(死角移動物体選択手段)
17 死角端点位置演算部(死角端点位置演算手段)
18 死角端点移動速度演算部(死角端点移動速度演算手段)
19 死角移動物体移動速度演算部(死角移動物体移動速度演算手段)
20 速度制御部(速度制御手段)
31 停止限界速度演算部(停止限界速度演算手段)
【特許請求の範囲】
【請求項1】
自車位置を検出する自車位置検出手段と、
自車に搭載され、自車前方を撮像する撮像手段と、
検出された自車位置と撮像された自車前方の映像に基づいて、自車前方に存在する交差点の形状を認識する交差点形状認識手段と、
撮像された自車前方の映像に基づいて、交差点接近中に自車の右側を自車と同一方に移動する各障害物の移動状態を検出する障害物検出手段と、
検出された各障害物の移動状態を記憶する障害物記憶手段と、
自車の交差点右折開始時、検出された自車位置と認識された交差点形状とに基づいて自車の旋回経路を演算する旋回経路演算手段と、
記憶された各障害物の移動状態に基づいて各障害物の交差点進入速度を演算し、自車の交差点右折開始時に自車の右側であって前記撮像手段の死角領域に存在する最も速度が高い障害物を死角移動物体として選択する死角移動物体選択手段と、
自車が演算された旋回経路を走行した場合の前記撮像手段の視界領域と死角領域との境界と前記死角移動物体の予測移動経路との交点を死角端点としたとき、交差点内で検出された自車位置における前記死角端点の位置を演算する死角端点位置演算手段と、
演算された死角端点位置での前記死角移動物体の移動方向における前記死角端点の移動速度を演算する死角端点移動速度演算手段と、
記憶された前記死角移動物体の移動状態に基づいて、前記演算された死角端点位置における前記死角移動物体の移動速度を検出する死角移動物体移動速度演算手段と、
演算された死角端点移動速度が演算された死角移動物体移動速度よりも高くなるように自車速を制御する速度制御手段と、
を備えたことを特徴とする車両用走行支援装置。
【請求項2】
請求項1に記載の車両用走行支援装置において、
前記速度制御手段は、前記旋回速度限界値を上限として自車速を制御することを特徴とする車両用走行支援装置。
【請求項3】
請求項1または請求項2に記載の車両用走行支援装置において、
演算された旋回経路と前記死角移動物体の予測移動経路とが交差する点で自車を停車させるために必要な自車速の上限値である停止限界速度を演算する停止限界速度演算手段を設け、
前記速度制御手段は、交差点右折開始時からの自車位置に応じた死角移動物体移動速度と停止限界速度との交点が自車の旋回速度限界値よりも低い場合、自車位置が前記交点に対応する位置に達するまでは前記停止限界速度と前記旋回速度限界値のうち速度が低い方を上限として自車速を制御し、自車位置が前記交点に対応する位置を超えたときは前記旋回速度限界値を上限として自車速を制御することを特徴とする車両用走行支援装置。
【請求項1】
自車位置を検出する自車位置検出手段と、
自車に搭載され、自車前方を撮像する撮像手段と、
検出された自車位置と撮像された自車前方の映像に基づいて、自車前方に存在する交差点の形状を認識する交差点形状認識手段と、
撮像された自車前方の映像に基づいて、交差点接近中に自車の右側を自車と同一方に移動する各障害物の移動状態を検出する障害物検出手段と、
検出された各障害物の移動状態を記憶する障害物記憶手段と、
自車の交差点右折開始時、検出された自車位置と認識された交差点形状とに基づいて自車の旋回経路を演算する旋回経路演算手段と、
記憶された各障害物の移動状態に基づいて各障害物の交差点進入速度を演算し、自車の交差点右折開始時に自車の右側であって前記撮像手段の死角領域に存在する最も速度が高い障害物を死角移動物体として選択する死角移動物体選択手段と、
自車が演算された旋回経路を走行した場合の前記撮像手段の視界領域と死角領域との境界と前記死角移動物体の予測移動経路との交点を死角端点としたとき、交差点内で検出された自車位置における前記死角端点の位置を演算する死角端点位置演算手段と、
演算された死角端点位置での前記死角移動物体の移動方向における前記死角端点の移動速度を演算する死角端点移動速度演算手段と、
記憶された前記死角移動物体の移動状態に基づいて、前記演算された死角端点位置における前記死角移動物体の移動速度を検出する死角移動物体移動速度演算手段と、
演算された死角端点移動速度が演算された死角移動物体移動速度よりも高くなるように自車速を制御する速度制御手段と、
を備えたことを特徴とする車両用走行支援装置。
【請求項2】
請求項1に記載の車両用走行支援装置において、
前記速度制御手段は、前記旋回速度限界値を上限として自車速を制御することを特徴とする車両用走行支援装置。
【請求項3】
請求項1または請求項2に記載の車両用走行支援装置において、
演算された旋回経路と前記死角移動物体の予測移動経路とが交差する点で自車を停車させるために必要な自車速の上限値である停止限界速度を演算する停止限界速度演算手段を設け、
前記速度制御手段は、交差点右折開始時からの自車位置に応じた死角移動物体移動速度と停止限界速度との交点が自車の旋回速度限界値よりも低い場合、自車位置が前記交点に対応する位置に達するまでは前記停止限界速度と前記旋回速度限界値のうち速度が低い方を上限として自車速を制御し、自車位置が前記交点に対応する位置を超えたときは前記旋回速度限界値を上限として自車速を制御することを特徴とする車両用走行支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図2】
【図3】
【図4】
【図5】
【図6】
【公開番号】特開2013−86782(P2013−86782A)
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願番号】特願2011−232365(P2011−232365)
【出願日】平成23年10月24日(2011.10.24)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成25年5月13日(2013.5.13)
【国際特許分類】
【出願日】平成23年10月24日(2011.10.24)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]