
車両用距離センサ
【課題】取付けが容易で、しかも車両のバンパに取り付けられた状態で確実に保持される車両用距離センサを提供する。
【解決手段】超音波センサ3(距離センサ)は、センサ本体42、ケース体46、ベゼル43、リテーナ44及びクランプ71を備える。超音波センサ3は、ケース体46のコネクタ部65の側からバンパ2,4の取付孔54に挿入されると、リテーナ44が取付孔54を通過するときに複数の爪部55が開方向に弾性変形する。取付孔54を通過した状態で爪部55が閉方向に弾性復帰する。クランプ71は、該クランプ71がケース体46に取り付けられた状態で、複数の爪部55のうちいずれかの爪部55と係合して該爪部55が開方向に弾性変形する動作を規制する突出壁部76(規制部)を有する。
【解決手段】超音波センサ3(距離センサ)は、センサ本体42、ケース体46、ベゼル43、リテーナ44及びクランプ71を備える。超音波センサ3は、ケース体46のコネクタ部65の側からバンパ2,4の取付孔54に挿入されると、リテーナ44が取付孔54を通過するときに複数の爪部55が開方向に弾性変形する。取付孔54を通過した状態で爪部55が閉方向に弾性復帰する。クランプ71は、該クランプ71がケース体46に取り付けられた状態で、複数の爪部55のうちいずれかの爪部55と係合して該爪部55が開方向に弾性変形する動作を規制する突出壁部76(規制部)を有する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、例えば車両の障害物検出装置に使用される車両用距離センサに関するものである。
【背景技術】
【0002】
近時の車両(例えば自動車)には、例えば駐車時における運転を支援するために、距離センサとしての例えば超音波センサが設けられている。この超音波センサは、車両の前後のバンパに所定数(例えば、前側のバンパに2個、後側のバンパに4個)取り付けられ、各超音波センサから送信した超音波が障害物に当たって戻ってくるまでの時間を検出することにより、車両と障害物までの距離を計測する。そして、その距離が設定値よりも小さくなれば、音声等で運転者に報知する。
【0003】
この種の超音波センサとして、例えば下記特許文献1に記載されているように、超音波センサをバンパの取付孔に取り付けるときにベゼルとケース体とを分離し、それらをバンパの外側と内側に配置してから両者を相対的に接近させて一体的に組み付けるものが知られている。この超音波センサでは、センサ本体を支持するベゼルの部分に複数本の金属ばねを取り付け、この金属ばねをバンパの取付孔の周縁部に係止させることによって超音波センサを固定するようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2000−513296号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記金属ばねは、例えばマルチフォーミング型によりベゼルとは別に製造し、後工程でベゼルと一体に組み付けている。このため、ベゼルに金属ばねを組み付けるための工程が必要となり、超音波センサのコストアップの要因となっている。
また、上記特許文献1に記載された超音波センサでは、バンパにベゼルを先に取り付け、後からケース体を組み付けるという2モーションの取付工程になっている。すなわち、最初からベゼルとケース体とを組み付けてバンパの取付孔に通す構造とした場合、金属ばねが取付孔を通過したときにつぶれて塑性変形してしまい、バンパを挟み込むことができなくなってしまうおそれがある。そして、各種の厚みのバンパに対応することも困難である。
【0006】
本発明は、上記不具合に鑑み、取付けが容易で、しかも車両のバンパに組み付けられた状態で確実に保持される車両用距離センサを提供することを課題としている。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明は、
車両のバンパの取付孔に取り付けられ、車両から障害物までの距離を計測するための距離センサであって、
車両の外部に信号を送信し、障害物に当たって戻ってくる反射信号を受信するセンサ本体と、
センサ本体を保持して、車両のバンパの取付孔に取り付けられるケース体と、
ケース体に接続されるハーネスを固定する機能を有し、ケース体に着脱可能に設けられるクランプと、
ケース体に嵌合される筒部を有し、その軸方向の一端部に取付孔の内径よりも大径のフランジ部が設けられたベゼルと、
樹脂材よりなり、ベゼルの筒部に嵌合されるリテーナと、を備え、
リテーナは、リング状の基部と、該基部における軸方向の端面から軸方向に沿って同一の側に延設される複数の腕部と、各腕部の先端から軸方向と交差する方向に突出して設けられ、それら突出部分の頂部を通る円の直径が取付孔の内径よりも大きく、取付孔に挿入されるときに開方向に弾性変形し、頂部が取付孔を通過した状態で閉方向に弾性復帰して取付孔の出口側の内周縁と係止される各爪部とを有し、
クランプは、複数の爪部のうちいずれかの爪部と係合して該爪部が開方向に弾性変形する動作を規制する規制部を有することを特徴とする。
【発明の効果】
【0008】
本発明に係る車両用距離センサは、上記したように構成され、センサ本体、ケース体、ベゼル、リテーナ及びクランプを備える。この距離センサがバンパの取付孔に取り付けられるとき、センサ本体、ケース体、ベゼル及びリテーナからなる距離センサがバンパの取付孔に挿入され、リテーナに設けられた爪部がバンパの取付孔の内周縁によって弾性変形しながら挿入される。爪部が弾性復帰し距離センサがバンパに取り付けられた状態で、ケース体にクランプを装着し、クランプの規制部が各爪部のうちいずれかの爪部と係合することにより、その爪部が開方向に弾性変形する動作が規制されて距離センサの抜止めが図られる。このため、距離センサに対してバンパの取付孔から離脱する向きの力が作用した場合でも、距離センサの脱落を良好に防止することができる。
【0009】
この場合、各爪部は、対向する爪部単体がリテーナの軸方向視において所定の開き角度でV字状に配置されており、爪部単体は、取付孔を通過するときにそれらの開き角度を大きくする方向に弾性変形し、クランプは、ケース体が車両のバンパの取付孔に取り付けられた後、該ケース体に対してリテーナの軸線方向へ近づけることで該ケース体に取り付けられ、規制部がリテーナの周方向にていずれかの爪部の爪部単体と近接配置されるように構成することができる。
【0010】
各爪部が、対向する爪部単体の組で構成され、爪部単体が取付孔を通過するときにそれらの開き角度を大きくする方向に弾性変形するものであれば、爪部単体の開き角度を大きくする方向への弾性変形により、各爪部をバンパの取付孔に容易に挿入することができる。また、クランプが、ケース体に対してリテーナの軸線方向へ近づけることで該ケース体に取り付けられるものであれば、クランプをケース体に容易に取り付けることができ、ひいてはクランプの規制部をいずれかの爪部間の領域内に容易に進入させ、所定の爪部単体に近接して配置することができる。
【0011】
また、クランプには、複数の係合爪が設けられ、各係合爪はケース体に設けられた被係合部と係合するように構成することができる。
【0012】
これによれば、ケース体に対するクランプの着脱を極めて簡易化(ワンタッチ着脱)することができる。
【図面の簡単な説明】
【0013】
【図1】超音波センサ3が取り付けられた車両1の平面図である。
【図2】障害物検出装置100のシステムブロック図である。
【図3】図2の要部の詳細図である。
【図4】超音波センサ3の斜視図である。
【図5】図4の超音波センサ3の分解斜視図である。
【図6】(A)はリテーナ44の爪部55の平面図、(B)は(A)の正面図、(C)は(A)の側面図である。
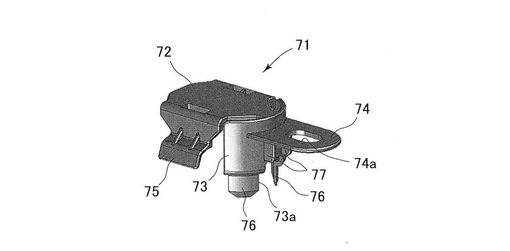
【図7】本発明の実施例1に係るクランプ71の斜視図である。
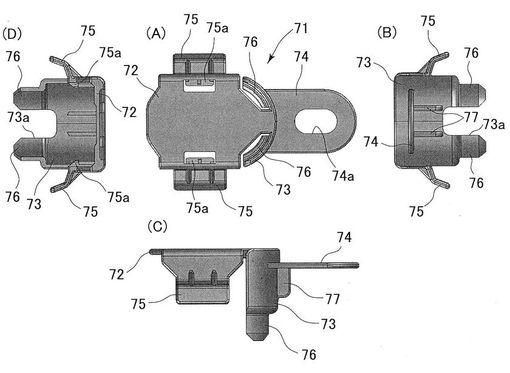
【図8】(A)は図7のクランプ71の平面図、(B)は(A)の正面図、(C)は(A)の側面図、(D)は(A)の背面図である。
【図9】(A),(B)は超音波センサ3をバンパ2の取付孔54に取り付けるときの説明図である。
【図10】(A),(B)は超音波センサ3をバンパ2の取付孔54に取り付けるときの説明図である。
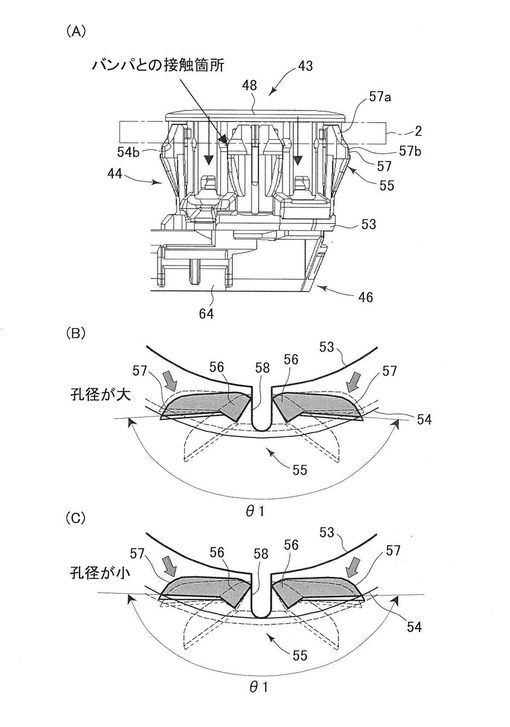
【図11】(A)は超音波センサ3をバンパ2に取り付けた状態を示す正面図、(B)は(A)において、バンパ2の厚みが薄い場合や取付孔54の孔径が大きい場合の平面図であり、(C)は(A)において、バンパ2の厚みが厚い場合や取付孔54の孔径が小さい場合の平面図である。
【図12】図10の超音波センサ3にクランプ71を取り付けるときの説明図である。
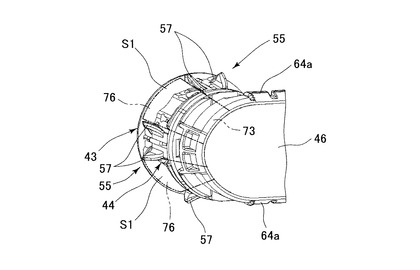
【図13】クランプ71の突出壁部76が4本の爪部単体57の弾性変形を規制する場合を例示する斜視図である。
【図14】図13の模式斜視図である。
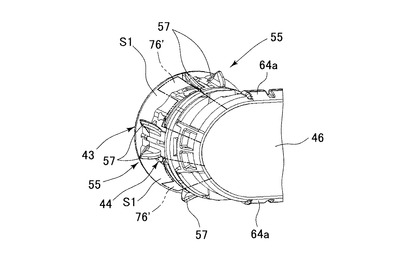
【図15】本発明の実施例2に係り、クランプ71の突出壁部76が2本の爪部単体57の弾性変形を規制する場合を例示する斜視図である。
【図16】図15の模式斜視図である。
【発明を実施するための形態】
【0014】
以下、本発明の各実施形態について図面を用いて説明する。
【実施例1】
【0015】
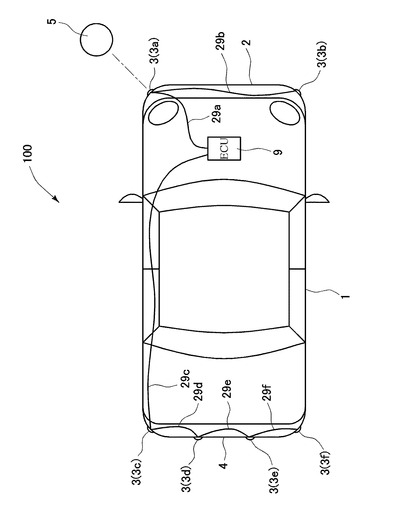
図1に示されるように、車両の障害物検出装置100(クリアランスソナー)は、車両1の前側のバンパ2における左右のコーナー部に取り付けられた距離センサとしての各超音波センサ3(3a,3b)と、車両1の後側のバンパ4における左右のコーナー部と中央部に取り付けられた各超音波センサ3(3c,3d,3e,3f)とを備えている。所定の条件の下で、各超音波センサ3から車両1の外部に向かって超音波が送信される。そして、この超音波の送信方向にある障害物5に当たって戻ってくる超音波(反射波)を受信することによって車両1から障害物5までの距離を検出し、その距離に応じて運転者に音声等で報知する。
【0016】
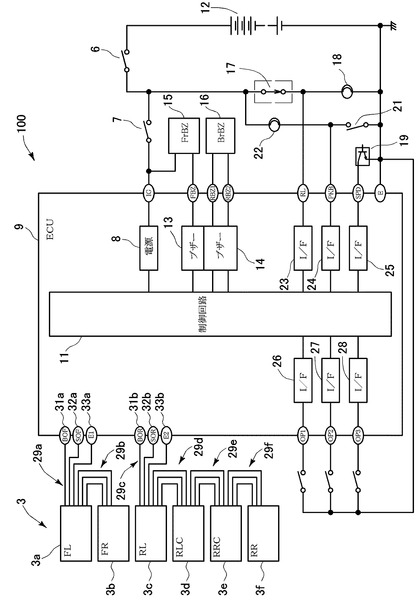
障害物検出装置100のシステムブロック図について説明する。図2に示されるように、障害物検出装置100のメインスイッチ7がONになっている状態で運転者がイグニッションスイッチ6をONにすると、電源回路8を介してECU9の制御回路11にバッテリー12からの電源が供給され、ブザー駆動回路13,14を介して前側のバンパ2に取り付けられた各超音波センサ3(3a,3b)に対応するブザー15と、後側のバンパ4に取り付けられた各超音波センサ3(3c,3d,3e,3f)に対応するブザー16とが作動待機状態となる。そして、運転者が車両1のシフトポジションを「パーキング(P)以外」に入れることにより、スタートスイッチ17がONとなり、障害物検出装置100が作動を開始する。なお、バックアップランプ18は、運転者がシフトポジションを「リバース(R)」に入れることにより、後側の各超音波センサ3(3d,3e)を作動させる等の作動条件を変えるために使用する。また、左右のコーナー部に取り付けられた各超音波センサ3(3a,3b,3c,3f)は、車速が所定値(例えば10km/h)以下のときにのみ作動するため、車速センサ19で車速を検出している。また、パーキングブレーキが作動しているときには障害物検出装置100は作動しないため、パーキングブレーキスイッチ21によりその作動状況を検出する。パーキングブレーキが作動しているときは、パーキングブレーキランプ22を点灯させることにより、運転者に報知する。これらの装置は、各インターフェース回路23〜25を介して制御回路11に接続されている。また、障害物検出装置100に関連するオプション装置は、各インターフェース回路26〜28を介して制御回路11に接続される。
【0017】
図1及び図2に示されるように、ECU9に各超音波センサ3(3a〜3f)が接続される。前側のバンパ2に取り付けられる2個の超音波センサ3a,3bのうち、バンパ2の左側(助手席側)コーナー部に取り付けられる超音波センサ3aが、ハーネス29aを介してECU9のGND端子31a、前側シリアル通信端子32a、電源端子33aに接続されている。また、バンパ2の右側(運転席側)コーナー部に取り付けられる超音波センサ3bは、ハーネス29bを介して超音波センサ3aに直列的に接続されている。同様に、後側のバンパ4の左側(助手席側)コーナー部に取り付けられる超音波センサ3cが、ハーネス29cを介してECU9のGND端子31b、後側シリアル通信端子32b、電源端子33bに接続されている。また、バンパ4の中央部及び右側(運転席側)コーナー部に取り付けられる各超音波センサ3d,3e,3fは、それぞれハーネス29d,29e,29fを介して超音波センサ3cに直列的に接続されている。
【0018】
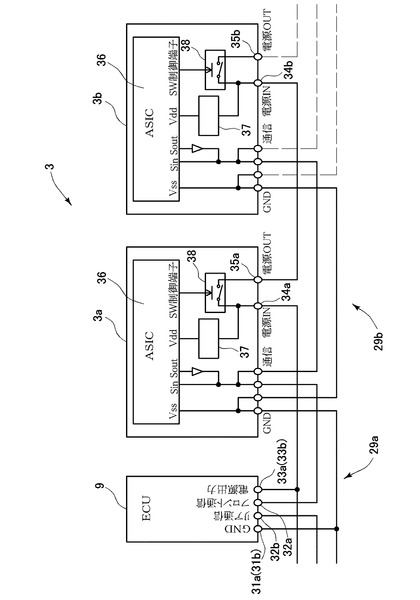
前側のバンパ2に取り付けられる超音波センサ3a,3bの接続形態について説明する。図3に示されるように、各超音波センサ3a,3bは、電源IN端子34a,34bと電源OUT端子35a,35bを有していて、ECU9の電源端子33aと超音波センサ3aの電源IN端子34aとが連結され、超音波センサ3aの電源OUT端子35aと超音波センサ3bの電源IN端子34bとが連結されている(デイジーチェーン接続)。超音波センサ3a(3b)の電源は、ASIC36(Application Specific Integrated Circuit)の電源端子(Vdd)と電源IN端子34a(34b)との間に介装されるレギュレータ37と、ASIC36のSW制御端子と電源IN端子34a(34b)及び電源OUT端子35a(35b)との間に介装されるFET38(電界効果トランジスタ)とを備える。即ち、FET38のスイッチング作用によって各超音波センサ3a(3b)への電源供給が切り替えられる。
【0019】
超音波センサ3bにさらに別の超音波センサ3を接続するときは、上記と同様に接続される。そのときの接続状態を、図3において破線で示す。なお、後側のバンパ4に取り付けられる4個の超音波センサ3c〜3fは、前側の超音波センサ3a,3bと全く同様に接続されるため説明を省略する。また、前側の超音波センサ3a,3bと後側超音波センサ3c〜3fの構成は全く同一なので、以降においてはそれらを総称する1つの超音波センサ3についての説明をする。
【0020】
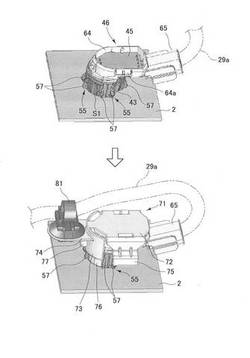
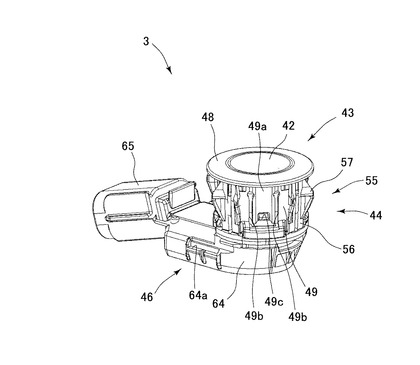
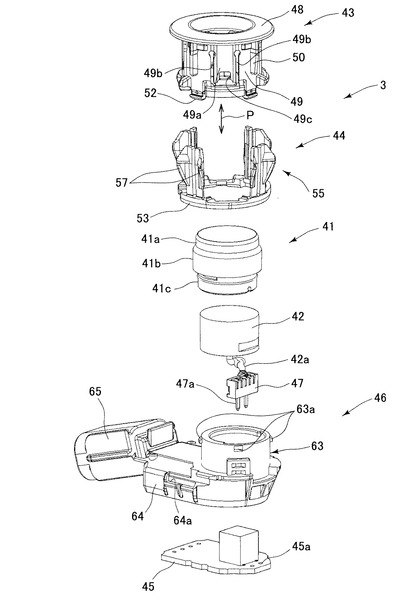
本実施例1の超音波センサ3の構成について説明する。図4及び図5に示されるように、超音波センサ3は、車両1の外部に向かって超音波を送信するとともに、障害物5(図1参照)に当たって戻ってきた反射波を受信する円柱形状のセンサ本体42(マイクロホン)と、センサ本体42を覆うシリコーンゴム等からなるクッション材41と、これらクッション材41及びセンサ本体42を支持するケース体46と、ケース体46を覆うベゼル43と、ベゼル43に装着されるリテーナ44と、センサ本体42と接続されセンサ本体を制御する電子回路部分である基板部材45と、を備えている。そして、ケース体46、ベゼル43及びリテーナ44が、ハーネス29a(ハーネス29b〜29fについても同様。以下の説明ではハーネス29aを代表して説明する。)を固定するためのクランプ71により覆われるようになっている(図12参照)。
【0021】
上記の各部材について説明する。クッション材41は、段付き円筒形状に形成され、両端部に位置し、ほぼ同じ外径を有する第1及び第2円筒部41a,41cと、中間部に位置し、第1及び第2円筒部41a,41cよりも少しだけ外径が大きい第3円筒部41bとを一体に備えている。
【0022】
センサ本体42には、所定の固有振動数を有する圧電素子(図示せず)が内装されている。基板部材45を作動させて圧電素子に所定の電圧を付加するとこの圧電素子が振動し、超音波が発生する。この超音波が、センサ本体42の上面から外部に送信される。そして、障害物5に当たって反射した超音波をセンサ本体42が受信する。このとき、超音波がセンサ本体42から障害物5までの往復に要した時間が計測されることにより、車両1から障害物5までの距離が求められる。
【0023】
センサ本体42の底面から電線42aが延設されていて、センサ本体42は、電線42aを介して基板部材45と接続される。すなわち、電線42aの先端に設けられたコネクタ47から突出する2本の端子47aが、基板部材45の対応する取付孔45aに挿入されることにより、センサ本体42と基板部材45とが接続される。
【0024】
次に、ベゼル43について説明する。ベゼル43は、薄いリング状のフランジ部48と、その下方に垂下するように延設された円筒形状の筒壁部49とを備える。筒壁部49の内径は、後述するケース体46におけるセンサ収容部63の外径よりも僅かに大きい。クッション材41で覆われたセンサ本体42は、クッション材41の第1及び第3円筒部41a,41bがベゼル43の内側部分に挿入されて収容された状態で、第2円筒部41cがケース体46のセンサ収容部63に挿入されて収容される。このため、フランジ部48の内径は、クッション材41の第1円筒部41aの外径よりも僅かに大きく、筒壁部49の内径は、クッション材41の第3円筒部41bの外径よりも僅かに大きい。そして、筒壁部49にクッション材41で覆われたセンサ本体42が収容されたとき、センサ本体42の上面は、ベゼル43のフランジ部48の上面と面一に配置される。
【0025】
ベゼル43の筒壁部49の外周面には、周方向に一定の角度をおいて複数本(本実施例の場合、4本)のリブ50が設けられている。各リブ50は、フランジ部48の下面からベゼル43の軸方向(以下、この方向を軸方向Pと記載する。)に沿って延設され、それらの下端部は、筒壁部49の高さ(軸方向Pの長さ)の約半分程度の部位に位置している。各リブ50は、ベゼル43の強度を補強するとともに、ベゼル43に嵌合されたリテーナ44が周方向にずれることがないように、ずれ止めの機能を有している。
【0026】
また、筒壁部49の下端部には、周方向に一定の角度をおいて複数(本実施例の場合、4本)の係止爪52が設けられている。本実施例のベゼル43の場合、各係止爪52は、各リブ50の直下に配置されている。これらの係止爪52は、リテーナ44がベゼル43に嵌合されたとき、リテーナ44の基部53(後述)に引っ掛かる。このとき、リテーナ44の爪部55(後述)の上端面(後述する腕部56の先端部56a)は、フランジ部48の下面に当接する。これにより、ベゼル43に嵌合されたリテーナ44が上下方向(軸方向P)に拘束され、上下方向にずれることはない。
【0027】
また、筒壁部49には、周方向に一定の角度をおいて複数(本実施例の場合、4つ)の可動壁部49aが設けられている。各可動壁部49aは、基端側を支点として径方向外向きに独自に弾性変形可能とされている。すなわち、筒壁部49には、その下端部側で開口しベゼル43の軸方向P沿いに延び出して上端部に達する一対のスリット49b,49bが複数組設けられており、一組のスリット49b,49b間に位置する筒壁部49の部位が可動壁部49aとされている。そして、各可動壁部49aには、後述するケース体46におけるセンサ収容部63の開口部近傍に設けられた突起部63aに係合可能なタブ孔部49cが設けられている。
【0028】
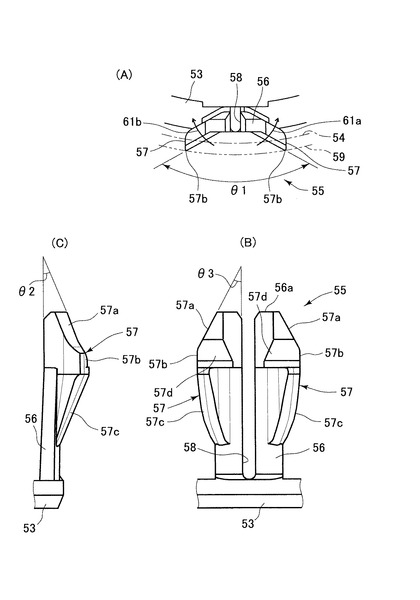
次に、リテーナ44について説明する。図4ないし図6に示されるように、リテーナ44は、ベゼル43の筒壁部49の外径よりも僅かに大きい内径を有するリング状の基部53と、基部53の上面からリテーナ44の軸方向Pに沿って立ち上がり、バンパ2,4の取付孔54と係止する複数組(本実施例の場合、4組)の爪部55とを備える。各爪部55の形状は、いずれも同一である。各爪部55は、基部53の上面からリテーナ44の軸方向に沿って延設される腕部56と、腕部56の外側面における幅方向の端部から、リテーナ44の軸方向Pと交差する方向で、かつ各腕部56の外側面に対して斜めになる方向に突出し、平面視(軸方向視)においてV字を呈するように対称に設けられた一対の爪部単体57とを備える。そして、腕部56における幅方向のほぼ中央部には、腕部56の先端部56aの側で開口し、基部53の上面にまで達するスリット58が、リテーナ44の軸方向Pに沿って設けられている。このため、各爪部55の爪部単体57は、それぞれ独自に弾性変形可能である。そして、一対の爪部単体57同士の開き角度θ1(図6(A)参照)は、105〜115度であることが望ましい。
【0029】
具体的に、各爪部55の爪部単体57は、それらの正面視(リテーナ44の側面視)において略三角形状で、腕部56の先端部56aから、リテーナ44の軸心から遠ざかる方向に斜めに立ち上がる第1稜線部57aと、爪部単体57の頂部57b(第1稜線部57aの終端部)から腕部56の表面(外側面)まで緩やかな傾斜角度で下る第2稜線部57cとを備える。そして、図6の(B),(C)に示されるように、爪部55の側面視において腕部56の内側面と爪部単体57の第1稜線部57aとがなす角度θ2は、例えば20〜25度である。また、爪部55の正面視において腕部56の内側面と爪部単体57の第1稜線部57aとがなす角度θ3は、例えば25〜30度である。
【0030】
図6の(A)に示されるように、リテーナ44の軸心を中心とし、各爪部55の爪部単体57の頂部57bを通る円59の内径は、バンパ2,4の取付孔54の内径よりも大きい。このため、超音波センサ3におけるリテーナ44の部分がバンパ2,4の取付孔54に挿入されたとき、各爪部55の爪部単体57は、図6の(A)に示す矢印61a,61bの方向に弾性変形する。
【0031】
次に、ケース体46について説明する。図4及び図5に示されるように、ケース体46は、クッション材41の第2円筒部41cを収容するための円筒状に形成されたセンサ収容部63と、センサ収容部63を支持するベース部64と、ベース部64の端部に斜めに取り付けられるコネクタ部65とを備える。ケース体46は、センサ収容部63にてクッション材41で覆われたセンサ本体42を支持するとともに、コネクタ部65にてハーネス29aを接続するという機能を有する。
【0032】
ベース部64の両側壁部には、後述するクランプ71に設けられた係合爪75aに係合する被係合部64aがそれぞれ突出形成されている。また、ベース部64の下面は開放されていて、その内部に基板部材45が収容された状態でクランプ71が取り付けられることにより閉塞される(図12参照)。
【0033】
センサ収容部63の開口部近傍には、周方向に一定の角度で複数(本実施例の場合、4つ)の突起部63aが設けられている。そして、各突起部63aが、ベゼル43における各可動壁部49aのタブ穴部49cと係合することにより、ベゼル43とケース体46とが一体化されるようになっている。
【0034】
リテーナ44がベゼル43に嵌合されるとき、リテーナ44の腕部56の内周面がベゼル43の筒壁部49の外周面を滑りながら嵌合される。このとき、ベゼル43の筒壁部49の外周面に設けられた各リブ50が、腕部56のスリット58の部分に入り込む。当然のことながら、リブ50の幅は、スリット58の内幅よりも狭い。これにより、リテーナ44が周方向にずれることはない。
【0035】
次に、クランプ71について説明する。図7、図8及び図12に示されるように、クランプ71は、ベース部64の下面を覆う平板形状の基部72と、略半円形状に形成され基部72の前側位置(図8(A)中の右側)にて基部72から下向きに延設される円弧壁部73と、円弧壁部73の外周面を基端側として更に前向きに延設されるクリップ固定壁部74と、角度の異なる二つの傾斜壁が一体に接続されてなり基部72の両側端(図8(A)中の上下端)を基端側として基部72から下向きにそれぞれ延設されるクランプ固定解除壁部75とを備えている。
【0036】
円弧壁部73は、下側半分が小径となるように段付き壁状に形成されるとともに、その下部に二股形状の突出壁部76が形成されるように下端側から中間部へわたって切欠部73aにより切り欠かれている。各突出壁部76は、リテーナ44の各爪部55の間の周方向間隔よりも僅かだけ小さい周長をなすように形成されており、クランプ71がケース体46に取り付けられた状態で、各突出壁部76が4組の爪部55間の領域のうち前側の二つの領域S1、すなわちコネクタ部65との干渉を回避するためにコネクタ部65が形成されていない側に位置する爪部55間の領域S1(図12、図14参照)内にそれぞれ進入し、それぞれ隣り合う2本の爪部単体57(全部で4本)と近接配置されるようになっている。各突出壁部76が本発明の規制部に相当する。
【0037】
クリップ固定壁部74は、円弧壁部73の外周面に設けられた複数本のリブ77(本実施例の場合、2本)によりその剛性が確保されている。クリップ固定壁部74には、ハーネス29aを束ねるワイヤクリップ81(図12、図14参照)を取り付けるための取付孔74aが形成されている。
【0038】
各クランプ固定解除壁部75には、弾性変形に伴いケース体46のベース部64における被係合部64aと係合可能な(引っ掛かる)係合爪75aが設けられている。各クランプ固定解除壁部75は、その基端側を回動支点として内向きに弾性変形可能とされ、例えば作業者が両クランプ固定解除壁部75の開き角度を大きくするよう上向きに引き上げることにより、係合爪75aと被係合部64aとの係合状態が解除され、クランプ71をケース体46から容易に取り外すことができる。
【0039】
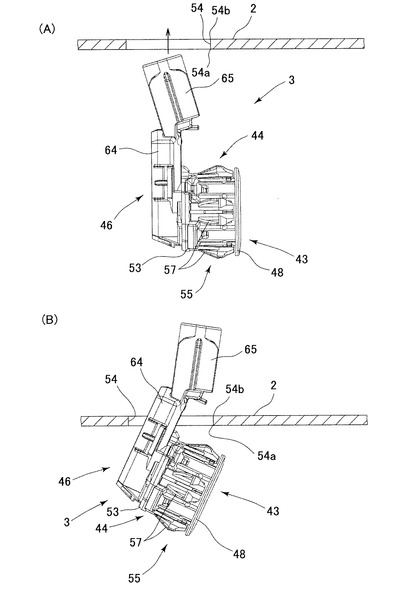
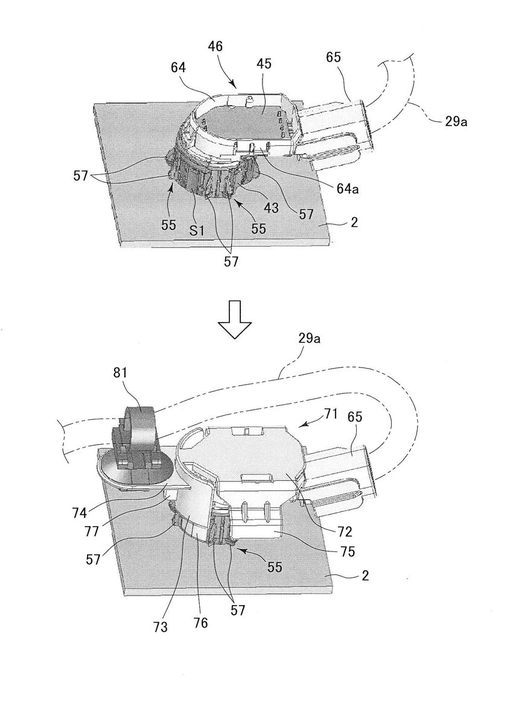
次に、本実施例の超音波センサ3を、バンパ2の取付孔54に取り付けるときの作用について説明する。図9の(A)に示されるように、センサ本体41、ベゼル43、リテーナ44、ケース体46等を一体に組み付けた状態の超音波センサ3を、バンパ2の取付孔54に、ケース体46のコネクタ部65の側を先にして挿入する。
【0040】
図9の(B)に示されるように、ケース体46のコネクタ部65がバンパ2の取付孔54を通過し、ケース体46のベース部64が取付孔54に位置するようにする。そして、超音波センサ3全体を傾けながら、ケース体46のベース部64を取付孔54に挿通させる。
【0041】
図10の(A)に示されるように、超音波センサ3のケース体46のベース部64をバンパ2と略平行に配置し、リテーナ44の部分を取付孔54に挿通させる。この状態で、超音波センサ3を押し込む。リテーナ44の基部53が取付孔54を通過し、各爪部55の爪部単体57の第2稜線部57cが取付孔54の入口側の内周縁54aに当接する。さらに超音波センサ3を押し込むと、各爪部55の爪部単体57がそれらの基端部(腕部56との接合部)を中心に、開き角度θ1を大きくする方向(図6の(A)において矢印61a,61bで示される方向)に弾性変形する。各爪部55の爪部単体57同士の間にスリット58が設けられているため、爪部単体57毎の弾性変形の自由度が高くなっている。
【0042】
各爪部55の爪部単体57が弾性変形し、それらがベゼル43の筒壁部49の外周面に接近すると、爪部単体57同士の頂部57bを結ぶ円59(図6の(A)参照)の直径がバンパ2の取付孔54の内径よりも小さくなり、リテーナ44(すなわち、爪部単体57の頂部57b)が取付孔54を通過可能となる。
【0043】
図10の(B)に示されるように、爪部単体57の頂部57bがバンパ2の取付孔54を通過し、取付孔54の出口側の内周縁54bを通過すると、爪部単体57の第1稜線部57aが取付孔54の内側の内周縁54bに当接する。そして、爪部単体57がそれらの基端部を中心に、開き角度θ1を小さくする方向(図6の(A)において矢印61a,61bで示される方向と反対の方向)に回動する(弾性復帰)。ベゼル43のフランジ部48がバンパ2の取付孔54の外側部分(バンパ2の表面)に当接したとき、取付孔54の内側の内周縁54bは、爪部単体57の第1稜線部57aと当接する。この結果、バンパ2は、爪部単体57の第1稜線部57aとベゼル43のフランジ部48とで挟まれる。このとき、超音波センサ3の爪部単体57が、弾性復帰力でもって取付孔54の内側の内周縁54bを押圧して係止するため、超音波センサ3が取付孔54から抜け出ることはない。
【0044】
このとき、バンパ2,4の厚みが薄い場合や取付孔54の孔径が大きい場合は、取付孔54の出口側の内周縁54bと爪部単体57の第1稜線部57aとの係止位置は、腕部56の先端部56a寄りになる。このため、図11の(A),(B)にてそれぞれ示されるように、超音波センサ3がバンパ2,4の取付孔54に取り付けられた状態で爪部単体57の開き角度θ1が小さくなる(換言すれば、爪部単体57は起立状態に近くなる)。このため、爪部単体57の弾性復帰力はそれほど大きくない。このとき、爪部単体57の第1稜線部57aは、取付孔54の内周縁54bに食い込んで係止される。
【0045】
一方、バンパ2,4の厚みが厚い場合や取付孔54の孔径が小さい場合は、取付孔54の出口側の内周縁54bと爪部単体57の第1稜線部57aとの係止位置は、爪部単体57の頂部57b寄りになる。このため、図11の(A),(C)にてそれぞれ示されるように、超音波センサ3がバンパ2,4の取付孔54に取り付けられた状態で爪部単体57の開き角度θ1が大きくなる(換言すれば、爪部単体57は寝かせ状態になる)。このとき、爪部単体57は、それらの外側面57dが大きな弾性復帰力で取付孔54の内周縁54bを押圧することによって係止される。
【0046】
ところで、上記した超音波センサ3は、作業者がバンパ2の内側から超音波センサ3をリテーナ44の軸方向Pに押し出すと、爪部単体57に対して、図6の(A)に示す矢印61a,61bの方向に回動させる力が作用するため、超音波センサ3を取付孔54から容易に抜き取ることができる。
【0047】
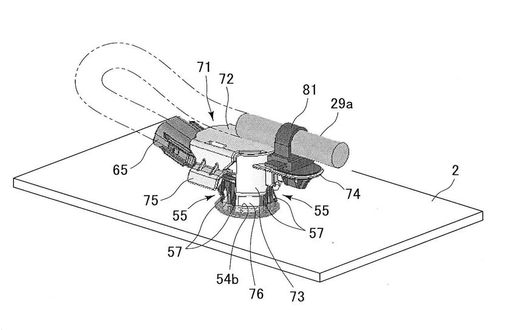
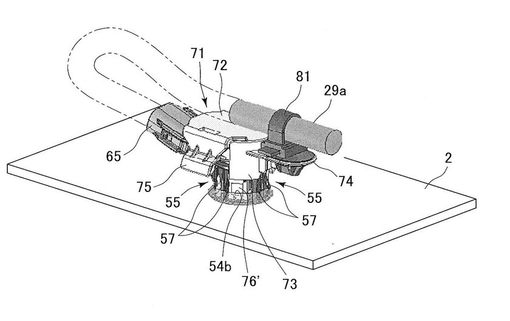
このため、本実施例1では、図12に示されるように、超音波センサ3がバンパ2に取り付けられた後、ケース体46にクランプ71が取り付けられるようになっている。この場合、最初にクランプ71をケース体46に取り付け、その後でハーネス29aをコネクタ部65に接続し、ハーネス29を束ねたワイヤクリップ81をクランプ71のクリップ固定壁部74に取り付けることができる。あるいは、最初にハーネス29aをコネクタ部65に接続し、その後でクランプ71をケース体46に取り付け、ハーネス29を束ねたワイヤクリップ81をクリップ固定壁部74に取り付けることもできる。
【0048】
いずれの場合も、クランプ71をケース体46に対してリテーナ44の軸線方向へ近づけることで、各クランプ固定解除壁部75の係合爪75aをケース体46の被係合部64aと係合させることができる。係合爪75aが被係合部64aと係合した状態では、図13及び図14に示されるように、クランプ71における円弧壁部73の各突出壁部76が2本の爪部単体57(二つの突出壁部76では4本の爪部単体57)の各側方に近接配置した状態となる。
【0049】
この状態で、超音波センサ3をリテーナ44の軸方向Pに押し出すと、爪部単体57が、図6の(A)の矢印61a,61bに示す開方向へ弾性変形しようとするが、爪部単体57は僅かだけ弾性変形すると、突出壁部76と係合(当接)し、それ以上開き角度を大きくする方向への回動が阻止される。このため、爪部単体57の頂部57bを結ぶ円59(図6の(A)参照)の直径がバンパ2の取付孔54の内径よりも小さくなることができなくなるので、リテーナ44(爪部単体57の頂部57b)が取付孔54を通過不能となる。すなわち、超音波センサ3を取付孔54から抜き取ることができなくなる。
【0050】
以上の説明からも明らかなように、上記実施例1では、クランプ71がケース体46に取り付けられた状態で、クランプ71の各突出壁部76が、その両隣に近接する爪部55の爪部単体57と係合することにより、爪部55が開方向に弾性変形する動作が規制されて超音波センサ3の抜止めが図られる。このため、例えば車両における軽衝突時等において超音波センサ3に対してバンパ2の取付孔54から離脱する向きの力が作用した場合でも、超音波センサ3の脱落を良好に防止することができる。これに対し、クランプ71をケース体46から取り外した状態で、ケース体46をリテーナ44の軸方向Pに押し出せば、各爪部55の爪部単体57に対して開方向への弾性変形を促すように力が作用するので、超音波センサ3を取付孔54から容易に抜き取ることができ、超音波センサ3のセンサ本体42を容易に交換することができる。
【0051】
また、上記実施例1では、クランプ71をケース体46に対してリテーナ44の軸線方向へ近づけ、クランプ71の係合爪75aをケース体46の被係合部64aと係合させることで、クランプ71をケース体46に容易に取り付けることができ、ひいてはクランプ71の各突出壁部76を爪部55間の領域S1内に容易に進入させ、所定の爪部単体57に近接して配置することができる。
【実施例2】
【0052】
上記実施例1では、図13及び図14に示されるように、クランプ71がケース体46に取り付けられた状態で、各突出壁部76が各領域S1内にそれぞれ進入し、隣り合う2本の爪部単体57と近接配置されるように構成されていた。これにより、突出壁部76との係合によって全部で4本の爪部単体57の弾性変形が直接規制されるようになっていたため、取付孔54からの超音波センサ3の抜止め効果を高めることができた。ただし、この態様に限らず、例えば図15及び図16に示されるように、各突出壁部76’の周長を小さく設定し、各突出壁部76’が隣り合う1本の爪部単体57(二つの突出壁部76では2本の爪部単体57)と近接配置されるように構成してもよい。すなわち、各爪部55の爪部単体57のうち少なくとも1本の爪部単体57の弾性変形を規制するようにすることで、取付孔54からの超音波センサ3の抜止めを図ることができる。
【0053】
なお、上記実施例1,2では、超音波センサ3が取り付けられる部位としてバンパ2,4を例示したが、本発明はバンパ2,4以外の部位に取り付けられる場合にも適用することができる。
【0054】
また、上記実施例1,2では、本発明を超音波センサに適用した場合について説明したが、本発明は光、電磁波等を利用して距離を測定するセンサにも適用することができる。
【符号の説明】
【0055】
1 車両
2,4 バンパ
3 超音波センサ(距離センサ)
5 障害物
29a〜29f ハーネス
41 クッション材
42 センサ本体
43 ベゼル
44 リテーナ
46 ケース体
54 取付孔
54b 出口側の内周縁
55 爪部
57 爪部単体
64 ベース部
64a 被係合部
65 コネクタ部
71 クランプ
72 基部
73 円弧壁部
74 クリップ固定壁部
75 クランプ固定解除壁部
75a 係合爪
76,76’ 突出壁部(規制部)
81 ワイヤクリップ
【技術分野】
【0001】
本発明は、例えば車両の障害物検出装置に使用される車両用距離センサに関するものである。
【背景技術】
【0002】
近時の車両(例えば自動車)には、例えば駐車時における運転を支援するために、距離センサとしての例えば超音波センサが設けられている。この超音波センサは、車両の前後のバンパに所定数(例えば、前側のバンパに2個、後側のバンパに4個)取り付けられ、各超音波センサから送信した超音波が障害物に当たって戻ってくるまでの時間を検出することにより、車両と障害物までの距離を計測する。そして、その距離が設定値よりも小さくなれば、音声等で運転者に報知する。
【0003】
この種の超音波センサとして、例えば下記特許文献1に記載されているように、超音波センサをバンパの取付孔に取り付けるときにベゼルとケース体とを分離し、それらをバンパの外側と内側に配置してから両者を相対的に接近させて一体的に組み付けるものが知られている。この超音波センサでは、センサ本体を支持するベゼルの部分に複数本の金属ばねを取り付け、この金属ばねをバンパの取付孔の周縁部に係止させることによって超音波センサを固定するようにしている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特表2000−513296号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
上記金属ばねは、例えばマルチフォーミング型によりベゼルとは別に製造し、後工程でベゼルと一体に組み付けている。このため、ベゼルに金属ばねを組み付けるための工程が必要となり、超音波センサのコストアップの要因となっている。
また、上記特許文献1に記載された超音波センサでは、バンパにベゼルを先に取り付け、後からケース体を組み付けるという2モーションの取付工程になっている。すなわち、最初からベゼルとケース体とを組み付けてバンパの取付孔に通す構造とした場合、金属ばねが取付孔を通過したときにつぶれて塑性変形してしまい、バンパを挟み込むことができなくなってしまうおそれがある。そして、各種の厚みのバンパに対応することも困難である。
【0006】
本発明は、上記不具合に鑑み、取付けが容易で、しかも車両のバンパに組み付けられた状態で確実に保持される車両用距離センサを提供することを課題としている。
【課題を解決するための手段】
【0007】
上記の課題を解決するために、本発明は、
車両のバンパの取付孔に取り付けられ、車両から障害物までの距離を計測するための距離センサであって、
車両の外部に信号を送信し、障害物に当たって戻ってくる反射信号を受信するセンサ本体と、
センサ本体を保持して、車両のバンパの取付孔に取り付けられるケース体と、
ケース体に接続されるハーネスを固定する機能を有し、ケース体に着脱可能に設けられるクランプと、
ケース体に嵌合される筒部を有し、その軸方向の一端部に取付孔の内径よりも大径のフランジ部が設けられたベゼルと、
樹脂材よりなり、ベゼルの筒部に嵌合されるリテーナと、を備え、
リテーナは、リング状の基部と、該基部における軸方向の端面から軸方向に沿って同一の側に延設される複数の腕部と、各腕部の先端から軸方向と交差する方向に突出して設けられ、それら突出部分の頂部を通る円の直径が取付孔の内径よりも大きく、取付孔に挿入されるときに開方向に弾性変形し、頂部が取付孔を通過した状態で閉方向に弾性復帰して取付孔の出口側の内周縁と係止される各爪部とを有し、
クランプは、複数の爪部のうちいずれかの爪部と係合して該爪部が開方向に弾性変形する動作を規制する規制部を有することを特徴とする。
【発明の効果】
【0008】
本発明に係る車両用距離センサは、上記したように構成され、センサ本体、ケース体、ベゼル、リテーナ及びクランプを備える。この距離センサがバンパの取付孔に取り付けられるとき、センサ本体、ケース体、ベゼル及びリテーナからなる距離センサがバンパの取付孔に挿入され、リテーナに設けられた爪部がバンパの取付孔の内周縁によって弾性変形しながら挿入される。爪部が弾性復帰し距離センサがバンパに取り付けられた状態で、ケース体にクランプを装着し、クランプの規制部が各爪部のうちいずれかの爪部と係合することにより、その爪部が開方向に弾性変形する動作が規制されて距離センサの抜止めが図られる。このため、距離センサに対してバンパの取付孔から離脱する向きの力が作用した場合でも、距離センサの脱落を良好に防止することができる。
【0009】
この場合、各爪部は、対向する爪部単体がリテーナの軸方向視において所定の開き角度でV字状に配置されており、爪部単体は、取付孔を通過するときにそれらの開き角度を大きくする方向に弾性変形し、クランプは、ケース体が車両のバンパの取付孔に取り付けられた後、該ケース体に対してリテーナの軸線方向へ近づけることで該ケース体に取り付けられ、規制部がリテーナの周方向にていずれかの爪部の爪部単体と近接配置されるように構成することができる。
【0010】
各爪部が、対向する爪部単体の組で構成され、爪部単体が取付孔を通過するときにそれらの開き角度を大きくする方向に弾性変形するものであれば、爪部単体の開き角度を大きくする方向への弾性変形により、各爪部をバンパの取付孔に容易に挿入することができる。また、クランプが、ケース体に対してリテーナの軸線方向へ近づけることで該ケース体に取り付けられるものであれば、クランプをケース体に容易に取り付けることができ、ひいてはクランプの規制部をいずれかの爪部間の領域内に容易に進入させ、所定の爪部単体に近接して配置することができる。
【0011】
また、クランプには、複数の係合爪が設けられ、各係合爪はケース体に設けられた被係合部と係合するように構成することができる。
【0012】
これによれば、ケース体に対するクランプの着脱を極めて簡易化(ワンタッチ着脱)することができる。
【図面の簡単な説明】
【0013】
【図1】超音波センサ3が取り付けられた車両1の平面図である。
【図2】障害物検出装置100のシステムブロック図である。
【図3】図2の要部の詳細図である。
【図4】超音波センサ3の斜視図である。
【図5】図4の超音波センサ3の分解斜視図である。
【図6】(A)はリテーナ44の爪部55の平面図、(B)は(A)の正面図、(C)は(A)の側面図である。
【図7】本発明の実施例1に係るクランプ71の斜視図である。
【図8】(A)は図7のクランプ71の平面図、(B)は(A)の正面図、(C)は(A)の側面図、(D)は(A)の背面図である。
【図9】(A),(B)は超音波センサ3をバンパ2の取付孔54に取り付けるときの説明図である。
【図10】(A),(B)は超音波センサ3をバンパ2の取付孔54に取り付けるときの説明図である。
【図11】(A)は超音波センサ3をバンパ2に取り付けた状態を示す正面図、(B)は(A)において、バンパ2の厚みが薄い場合や取付孔54の孔径が大きい場合の平面図であり、(C)は(A)において、バンパ2の厚みが厚い場合や取付孔54の孔径が小さい場合の平面図である。
【図12】図10の超音波センサ3にクランプ71を取り付けるときの説明図である。
【図13】クランプ71の突出壁部76が4本の爪部単体57の弾性変形を規制する場合を例示する斜視図である。
【図14】図13の模式斜視図である。
【図15】本発明の実施例2に係り、クランプ71の突出壁部76が2本の爪部単体57の弾性変形を規制する場合を例示する斜視図である。
【図16】図15の模式斜視図である。
【発明を実施するための形態】
【0014】
以下、本発明の各実施形態について図面を用いて説明する。
【実施例1】
【0015】
図1に示されるように、車両の障害物検出装置100(クリアランスソナー)は、車両1の前側のバンパ2における左右のコーナー部に取り付けられた距離センサとしての各超音波センサ3(3a,3b)と、車両1の後側のバンパ4における左右のコーナー部と中央部に取り付けられた各超音波センサ3(3c,3d,3e,3f)とを備えている。所定の条件の下で、各超音波センサ3から車両1の外部に向かって超音波が送信される。そして、この超音波の送信方向にある障害物5に当たって戻ってくる超音波(反射波)を受信することによって車両1から障害物5までの距離を検出し、その距離に応じて運転者に音声等で報知する。
【0016】
障害物検出装置100のシステムブロック図について説明する。図2に示されるように、障害物検出装置100のメインスイッチ7がONになっている状態で運転者がイグニッションスイッチ6をONにすると、電源回路8を介してECU9の制御回路11にバッテリー12からの電源が供給され、ブザー駆動回路13,14を介して前側のバンパ2に取り付けられた各超音波センサ3(3a,3b)に対応するブザー15と、後側のバンパ4に取り付けられた各超音波センサ3(3c,3d,3e,3f)に対応するブザー16とが作動待機状態となる。そして、運転者が車両1のシフトポジションを「パーキング(P)以外」に入れることにより、スタートスイッチ17がONとなり、障害物検出装置100が作動を開始する。なお、バックアップランプ18は、運転者がシフトポジションを「リバース(R)」に入れることにより、後側の各超音波センサ3(3d,3e)を作動させる等の作動条件を変えるために使用する。また、左右のコーナー部に取り付けられた各超音波センサ3(3a,3b,3c,3f)は、車速が所定値(例えば10km/h)以下のときにのみ作動するため、車速センサ19で車速を検出している。また、パーキングブレーキが作動しているときには障害物検出装置100は作動しないため、パーキングブレーキスイッチ21によりその作動状況を検出する。パーキングブレーキが作動しているときは、パーキングブレーキランプ22を点灯させることにより、運転者に報知する。これらの装置は、各インターフェース回路23〜25を介して制御回路11に接続されている。また、障害物検出装置100に関連するオプション装置は、各インターフェース回路26〜28を介して制御回路11に接続される。
【0017】
図1及び図2に示されるように、ECU9に各超音波センサ3(3a〜3f)が接続される。前側のバンパ2に取り付けられる2個の超音波センサ3a,3bのうち、バンパ2の左側(助手席側)コーナー部に取り付けられる超音波センサ3aが、ハーネス29aを介してECU9のGND端子31a、前側シリアル通信端子32a、電源端子33aに接続されている。また、バンパ2の右側(運転席側)コーナー部に取り付けられる超音波センサ3bは、ハーネス29bを介して超音波センサ3aに直列的に接続されている。同様に、後側のバンパ4の左側(助手席側)コーナー部に取り付けられる超音波センサ3cが、ハーネス29cを介してECU9のGND端子31b、後側シリアル通信端子32b、電源端子33bに接続されている。また、バンパ4の中央部及び右側(運転席側)コーナー部に取り付けられる各超音波センサ3d,3e,3fは、それぞれハーネス29d,29e,29fを介して超音波センサ3cに直列的に接続されている。
【0018】
前側のバンパ2に取り付けられる超音波センサ3a,3bの接続形態について説明する。図3に示されるように、各超音波センサ3a,3bは、電源IN端子34a,34bと電源OUT端子35a,35bを有していて、ECU9の電源端子33aと超音波センサ3aの電源IN端子34aとが連結され、超音波センサ3aの電源OUT端子35aと超音波センサ3bの電源IN端子34bとが連結されている(デイジーチェーン接続)。超音波センサ3a(3b)の電源は、ASIC36(Application Specific Integrated Circuit)の電源端子(Vdd)と電源IN端子34a(34b)との間に介装されるレギュレータ37と、ASIC36のSW制御端子と電源IN端子34a(34b)及び電源OUT端子35a(35b)との間に介装されるFET38(電界効果トランジスタ)とを備える。即ち、FET38のスイッチング作用によって各超音波センサ3a(3b)への電源供給が切り替えられる。
【0019】
超音波センサ3bにさらに別の超音波センサ3を接続するときは、上記と同様に接続される。そのときの接続状態を、図3において破線で示す。なお、後側のバンパ4に取り付けられる4個の超音波センサ3c〜3fは、前側の超音波センサ3a,3bと全く同様に接続されるため説明を省略する。また、前側の超音波センサ3a,3bと後側超音波センサ3c〜3fの構成は全く同一なので、以降においてはそれらを総称する1つの超音波センサ3についての説明をする。
【0020】
本実施例1の超音波センサ3の構成について説明する。図4及び図5に示されるように、超音波センサ3は、車両1の外部に向かって超音波を送信するとともに、障害物5(図1参照)に当たって戻ってきた反射波を受信する円柱形状のセンサ本体42(マイクロホン)と、センサ本体42を覆うシリコーンゴム等からなるクッション材41と、これらクッション材41及びセンサ本体42を支持するケース体46と、ケース体46を覆うベゼル43と、ベゼル43に装着されるリテーナ44と、センサ本体42と接続されセンサ本体を制御する電子回路部分である基板部材45と、を備えている。そして、ケース体46、ベゼル43及びリテーナ44が、ハーネス29a(ハーネス29b〜29fについても同様。以下の説明ではハーネス29aを代表して説明する。)を固定するためのクランプ71により覆われるようになっている(図12参照)。
【0021】
上記の各部材について説明する。クッション材41は、段付き円筒形状に形成され、両端部に位置し、ほぼ同じ外径を有する第1及び第2円筒部41a,41cと、中間部に位置し、第1及び第2円筒部41a,41cよりも少しだけ外径が大きい第3円筒部41bとを一体に備えている。
【0022】
センサ本体42には、所定の固有振動数を有する圧電素子(図示せず)が内装されている。基板部材45を作動させて圧電素子に所定の電圧を付加するとこの圧電素子が振動し、超音波が発生する。この超音波が、センサ本体42の上面から外部に送信される。そして、障害物5に当たって反射した超音波をセンサ本体42が受信する。このとき、超音波がセンサ本体42から障害物5までの往復に要した時間が計測されることにより、車両1から障害物5までの距離が求められる。
【0023】
センサ本体42の底面から電線42aが延設されていて、センサ本体42は、電線42aを介して基板部材45と接続される。すなわち、電線42aの先端に設けられたコネクタ47から突出する2本の端子47aが、基板部材45の対応する取付孔45aに挿入されることにより、センサ本体42と基板部材45とが接続される。
【0024】
次に、ベゼル43について説明する。ベゼル43は、薄いリング状のフランジ部48と、その下方に垂下するように延設された円筒形状の筒壁部49とを備える。筒壁部49の内径は、後述するケース体46におけるセンサ収容部63の外径よりも僅かに大きい。クッション材41で覆われたセンサ本体42は、クッション材41の第1及び第3円筒部41a,41bがベゼル43の内側部分に挿入されて収容された状態で、第2円筒部41cがケース体46のセンサ収容部63に挿入されて収容される。このため、フランジ部48の内径は、クッション材41の第1円筒部41aの外径よりも僅かに大きく、筒壁部49の内径は、クッション材41の第3円筒部41bの外径よりも僅かに大きい。そして、筒壁部49にクッション材41で覆われたセンサ本体42が収容されたとき、センサ本体42の上面は、ベゼル43のフランジ部48の上面と面一に配置される。
【0025】
ベゼル43の筒壁部49の外周面には、周方向に一定の角度をおいて複数本(本実施例の場合、4本)のリブ50が設けられている。各リブ50は、フランジ部48の下面からベゼル43の軸方向(以下、この方向を軸方向Pと記載する。)に沿って延設され、それらの下端部は、筒壁部49の高さ(軸方向Pの長さ)の約半分程度の部位に位置している。各リブ50は、ベゼル43の強度を補強するとともに、ベゼル43に嵌合されたリテーナ44が周方向にずれることがないように、ずれ止めの機能を有している。
【0026】
また、筒壁部49の下端部には、周方向に一定の角度をおいて複数(本実施例の場合、4本)の係止爪52が設けられている。本実施例のベゼル43の場合、各係止爪52は、各リブ50の直下に配置されている。これらの係止爪52は、リテーナ44がベゼル43に嵌合されたとき、リテーナ44の基部53(後述)に引っ掛かる。このとき、リテーナ44の爪部55(後述)の上端面(後述する腕部56の先端部56a)は、フランジ部48の下面に当接する。これにより、ベゼル43に嵌合されたリテーナ44が上下方向(軸方向P)に拘束され、上下方向にずれることはない。
【0027】
また、筒壁部49には、周方向に一定の角度をおいて複数(本実施例の場合、4つ)の可動壁部49aが設けられている。各可動壁部49aは、基端側を支点として径方向外向きに独自に弾性変形可能とされている。すなわち、筒壁部49には、その下端部側で開口しベゼル43の軸方向P沿いに延び出して上端部に達する一対のスリット49b,49bが複数組設けられており、一組のスリット49b,49b間に位置する筒壁部49の部位が可動壁部49aとされている。そして、各可動壁部49aには、後述するケース体46におけるセンサ収容部63の開口部近傍に設けられた突起部63aに係合可能なタブ孔部49cが設けられている。
【0028】
次に、リテーナ44について説明する。図4ないし図6に示されるように、リテーナ44は、ベゼル43の筒壁部49の外径よりも僅かに大きい内径を有するリング状の基部53と、基部53の上面からリテーナ44の軸方向Pに沿って立ち上がり、バンパ2,4の取付孔54と係止する複数組(本実施例の場合、4組)の爪部55とを備える。各爪部55の形状は、いずれも同一である。各爪部55は、基部53の上面からリテーナ44の軸方向に沿って延設される腕部56と、腕部56の外側面における幅方向の端部から、リテーナ44の軸方向Pと交差する方向で、かつ各腕部56の外側面に対して斜めになる方向に突出し、平面視(軸方向視)においてV字を呈するように対称に設けられた一対の爪部単体57とを備える。そして、腕部56における幅方向のほぼ中央部には、腕部56の先端部56aの側で開口し、基部53の上面にまで達するスリット58が、リテーナ44の軸方向Pに沿って設けられている。このため、各爪部55の爪部単体57は、それぞれ独自に弾性変形可能である。そして、一対の爪部単体57同士の開き角度θ1(図6(A)参照)は、105〜115度であることが望ましい。
【0029】
具体的に、各爪部55の爪部単体57は、それらの正面視(リテーナ44の側面視)において略三角形状で、腕部56の先端部56aから、リテーナ44の軸心から遠ざかる方向に斜めに立ち上がる第1稜線部57aと、爪部単体57の頂部57b(第1稜線部57aの終端部)から腕部56の表面(外側面)まで緩やかな傾斜角度で下る第2稜線部57cとを備える。そして、図6の(B),(C)に示されるように、爪部55の側面視において腕部56の内側面と爪部単体57の第1稜線部57aとがなす角度θ2は、例えば20〜25度である。また、爪部55の正面視において腕部56の内側面と爪部単体57の第1稜線部57aとがなす角度θ3は、例えば25〜30度である。
【0030】
図6の(A)に示されるように、リテーナ44の軸心を中心とし、各爪部55の爪部単体57の頂部57bを通る円59の内径は、バンパ2,4の取付孔54の内径よりも大きい。このため、超音波センサ3におけるリテーナ44の部分がバンパ2,4の取付孔54に挿入されたとき、各爪部55の爪部単体57は、図6の(A)に示す矢印61a,61bの方向に弾性変形する。
【0031】
次に、ケース体46について説明する。図4及び図5に示されるように、ケース体46は、クッション材41の第2円筒部41cを収容するための円筒状に形成されたセンサ収容部63と、センサ収容部63を支持するベース部64と、ベース部64の端部に斜めに取り付けられるコネクタ部65とを備える。ケース体46は、センサ収容部63にてクッション材41で覆われたセンサ本体42を支持するとともに、コネクタ部65にてハーネス29aを接続するという機能を有する。
【0032】
ベース部64の両側壁部には、後述するクランプ71に設けられた係合爪75aに係合する被係合部64aがそれぞれ突出形成されている。また、ベース部64の下面は開放されていて、その内部に基板部材45が収容された状態でクランプ71が取り付けられることにより閉塞される(図12参照)。
【0033】
センサ収容部63の開口部近傍には、周方向に一定の角度で複数(本実施例の場合、4つ)の突起部63aが設けられている。そして、各突起部63aが、ベゼル43における各可動壁部49aのタブ穴部49cと係合することにより、ベゼル43とケース体46とが一体化されるようになっている。
【0034】
リテーナ44がベゼル43に嵌合されるとき、リテーナ44の腕部56の内周面がベゼル43の筒壁部49の外周面を滑りながら嵌合される。このとき、ベゼル43の筒壁部49の外周面に設けられた各リブ50が、腕部56のスリット58の部分に入り込む。当然のことながら、リブ50の幅は、スリット58の内幅よりも狭い。これにより、リテーナ44が周方向にずれることはない。
【0035】
次に、クランプ71について説明する。図7、図8及び図12に示されるように、クランプ71は、ベース部64の下面を覆う平板形状の基部72と、略半円形状に形成され基部72の前側位置(図8(A)中の右側)にて基部72から下向きに延設される円弧壁部73と、円弧壁部73の外周面を基端側として更に前向きに延設されるクリップ固定壁部74と、角度の異なる二つの傾斜壁が一体に接続されてなり基部72の両側端(図8(A)中の上下端)を基端側として基部72から下向きにそれぞれ延設されるクランプ固定解除壁部75とを備えている。
【0036】
円弧壁部73は、下側半分が小径となるように段付き壁状に形成されるとともに、その下部に二股形状の突出壁部76が形成されるように下端側から中間部へわたって切欠部73aにより切り欠かれている。各突出壁部76は、リテーナ44の各爪部55の間の周方向間隔よりも僅かだけ小さい周長をなすように形成されており、クランプ71がケース体46に取り付けられた状態で、各突出壁部76が4組の爪部55間の領域のうち前側の二つの領域S1、すなわちコネクタ部65との干渉を回避するためにコネクタ部65が形成されていない側に位置する爪部55間の領域S1(図12、図14参照)内にそれぞれ進入し、それぞれ隣り合う2本の爪部単体57(全部で4本)と近接配置されるようになっている。各突出壁部76が本発明の規制部に相当する。
【0037】
クリップ固定壁部74は、円弧壁部73の外周面に設けられた複数本のリブ77(本実施例の場合、2本)によりその剛性が確保されている。クリップ固定壁部74には、ハーネス29aを束ねるワイヤクリップ81(図12、図14参照)を取り付けるための取付孔74aが形成されている。
【0038】
各クランプ固定解除壁部75には、弾性変形に伴いケース体46のベース部64における被係合部64aと係合可能な(引っ掛かる)係合爪75aが設けられている。各クランプ固定解除壁部75は、その基端側を回動支点として内向きに弾性変形可能とされ、例えば作業者が両クランプ固定解除壁部75の開き角度を大きくするよう上向きに引き上げることにより、係合爪75aと被係合部64aとの係合状態が解除され、クランプ71をケース体46から容易に取り外すことができる。
【0039】
次に、本実施例の超音波センサ3を、バンパ2の取付孔54に取り付けるときの作用について説明する。図9の(A)に示されるように、センサ本体41、ベゼル43、リテーナ44、ケース体46等を一体に組み付けた状態の超音波センサ3を、バンパ2の取付孔54に、ケース体46のコネクタ部65の側を先にして挿入する。
【0040】
図9の(B)に示されるように、ケース体46のコネクタ部65がバンパ2の取付孔54を通過し、ケース体46のベース部64が取付孔54に位置するようにする。そして、超音波センサ3全体を傾けながら、ケース体46のベース部64を取付孔54に挿通させる。
【0041】
図10の(A)に示されるように、超音波センサ3のケース体46のベース部64をバンパ2と略平行に配置し、リテーナ44の部分を取付孔54に挿通させる。この状態で、超音波センサ3を押し込む。リテーナ44の基部53が取付孔54を通過し、各爪部55の爪部単体57の第2稜線部57cが取付孔54の入口側の内周縁54aに当接する。さらに超音波センサ3を押し込むと、各爪部55の爪部単体57がそれらの基端部(腕部56との接合部)を中心に、開き角度θ1を大きくする方向(図6の(A)において矢印61a,61bで示される方向)に弾性変形する。各爪部55の爪部単体57同士の間にスリット58が設けられているため、爪部単体57毎の弾性変形の自由度が高くなっている。
【0042】
各爪部55の爪部単体57が弾性変形し、それらがベゼル43の筒壁部49の外周面に接近すると、爪部単体57同士の頂部57bを結ぶ円59(図6の(A)参照)の直径がバンパ2の取付孔54の内径よりも小さくなり、リテーナ44(すなわち、爪部単体57の頂部57b)が取付孔54を通過可能となる。
【0043】
図10の(B)に示されるように、爪部単体57の頂部57bがバンパ2の取付孔54を通過し、取付孔54の出口側の内周縁54bを通過すると、爪部単体57の第1稜線部57aが取付孔54の内側の内周縁54bに当接する。そして、爪部単体57がそれらの基端部を中心に、開き角度θ1を小さくする方向(図6の(A)において矢印61a,61bで示される方向と反対の方向)に回動する(弾性復帰)。ベゼル43のフランジ部48がバンパ2の取付孔54の外側部分(バンパ2の表面)に当接したとき、取付孔54の内側の内周縁54bは、爪部単体57の第1稜線部57aと当接する。この結果、バンパ2は、爪部単体57の第1稜線部57aとベゼル43のフランジ部48とで挟まれる。このとき、超音波センサ3の爪部単体57が、弾性復帰力でもって取付孔54の内側の内周縁54bを押圧して係止するため、超音波センサ3が取付孔54から抜け出ることはない。
【0044】
このとき、バンパ2,4の厚みが薄い場合や取付孔54の孔径が大きい場合は、取付孔54の出口側の内周縁54bと爪部単体57の第1稜線部57aとの係止位置は、腕部56の先端部56a寄りになる。このため、図11の(A),(B)にてそれぞれ示されるように、超音波センサ3がバンパ2,4の取付孔54に取り付けられた状態で爪部単体57の開き角度θ1が小さくなる(換言すれば、爪部単体57は起立状態に近くなる)。このため、爪部単体57の弾性復帰力はそれほど大きくない。このとき、爪部単体57の第1稜線部57aは、取付孔54の内周縁54bに食い込んで係止される。
【0045】
一方、バンパ2,4の厚みが厚い場合や取付孔54の孔径が小さい場合は、取付孔54の出口側の内周縁54bと爪部単体57の第1稜線部57aとの係止位置は、爪部単体57の頂部57b寄りになる。このため、図11の(A),(C)にてそれぞれ示されるように、超音波センサ3がバンパ2,4の取付孔54に取り付けられた状態で爪部単体57の開き角度θ1が大きくなる(換言すれば、爪部単体57は寝かせ状態になる)。このとき、爪部単体57は、それらの外側面57dが大きな弾性復帰力で取付孔54の内周縁54bを押圧することによって係止される。
【0046】
ところで、上記した超音波センサ3は、作業者がバンパ2の内側から超音波センサ3をリテーナ44の軸方向Pに押し出すと、爪部単体57に対して、図6の(A)に示す矢印61a,61bの方向に回動させる力が作用するため、超音波センサ3を取付孔54から容易に抜き取ることができる。
【0047】
このため、本実施例1では、図12に示されるように、超音波センサ3がバンパ2に取り付けられた後、ケース体46にクランプ71が取り付けられるようになっている。この場合、最初にクランプ71をケース体46に取り付け、その後でハーネス29aをコネクタ部65に接続し、ハーネス29を束ねたワイヤクリップ81をクランプ71のクリップ固定壁部74に取り付けることができる。あるいは、最初にハーネス29aをコネクタ部65に接続し、その後でクランプ71をケース体46に取り付け、ハーネス29を束ねたワイヤクリップ81をクリップ固定壁部74に取り付けることもできる。
【0048】
いずれの場合も、クランプ71をケース体46に対してリテーナ44の軸線方向へ近づけることで、各クランプ固定解除壁部75の係合爪75aをケース体46の被係合部64aと係合させることができる。係合爪75aが被係合部64aと係合した状態では、図13及び図14に示されるように、クランプ71における円弧壁部73の各突出壁部76が2本の爪部単体57(二つの突出壁部76では4本の爪部単体57)の各側方に近接配置した状態となる。
【0049】
この状態で、超音波センサ3をリテーナ44の軸方向Pに押し出すと、爪部単体57が、図6の(A)の矢印61a,61bに示す開方向へ弾性変形しようとするが、爪部単体57は僅かだけ弾性変形すると、突出壁部76と係合(当接)し、それ以上開き角度を大きくする方向への回動が阻止される。このため、爪部単体57の頂部57bを結ぶ円59(図6の(A)参照)の直径がバンパ2の取付孔54の内径よりも小さくなることができなくなるので、リテーナ44(爪部単体57の頂部57b)が取付孔54を通過不能となる。すなわち、超音波センサ3を取付孔54から抜き取ることができなくなる。
【0050】
以上の説明からも明らかなように、上記実施例1では、クランプ71がケース体46に取り付けられた状態で、クランプ71の各突出壁部76が、その両隣に近接する爪部55の爪部単体57と係合することにより、爪部55が開方向に弾性変形する動作が規制されて超音波センサ3の抜止めが図られる。このため、例えば車両における軽衝突時等において超音波センサ3に対してバンパ2の取付孔54から離脱する向きの力が作用した場合でも、超音波センサ3の脱落を良好に防止することができる。これに対し、クランプ71をケース体46から取り外した状態で、ケース体46をリテーナ44の軸方向Pに押し出せば、各爪部55の爪部単体57に対して開方向への弾性変形を促すように力が作用するので、超音波センサ3を取付孔54から容易に抜き取ることができ、超音波センサ3のセンサ本体42を容易に交換することができる。
【0051】
また、上記実施例1では、クランプ71をケース体46に対してリテーナ44の軸線方向へ近づけ、クランプ71の係合爪75aをケース体46の被係合部64aと係合させることで、クランプ71をケース体46に容易に取り付けることができ、ひいてはクランプ71の各突出壁部76を爪部55間の領域S1内に容易に進入させ、所定の爪部単体57に近接して配置することができる。
【実施例2】
【0052】
上記実施例1では、図13及び図14に示されるように、クランプ71がケース体46に取り付けられた状態で、各突出壁部76が各領域S1内にそれぞれ進入し、隣り合う2本の爪部単体57と近接配置されるように構成されていた。これにより、突出壁部76との係合によって全部で4本の爪部単体57の弾性変形が直接規制されるようになっていたため、取付孔54からの超音波センサ3の抜止め効果を高めることができた。ただし、この態様に限らず、例えば図15及び図16に示されるように、各突出壁部76’の周長を小さく設定し、各突出壁部76’が隣り合う1本の爪部単体57(二つの突出壁部76では2本の爪部単体57)と近接配置されるように構成してもよい。すなわち、各爪部55の爪部単体57のうち少なくとも1本の爪部単体57の弾性変形を規制するようにすることで、取付孔54からの超音波センサ3の抜止めを図ることができる。
【0053】
なお、上記実施例1,2では、超音波センサ3が取り付けられる部位としてバンパ2,4を例示したが、本発明はバンパ2,4以外の部位に取り付けられる場合にも適用することができる。
【0054】
また、上記実施例1,2では、本発明を超音波センサに適用した場合について説明したが、本発明は光、電磁波等を利用して距離を測定するセンサにも適用することができる。
【符号の説明】
【0055】
1 車両
2,4 バンパ
3 超音波センサ(距離センサ)
5 障害物
29a〜29f ハーネス
41 クッション材
42 センサ本体
43 ベゼル
44 リテーナ
46 ケース体
54 取付孔
54b 出口側の内周縁
55 爪部
57 爪部単体
64 ベース部
64a 被係合部
65 コネクタ部
71 クランプ
72 基部
73 円弧壁部
74 クリップ固定壁部
75 クランプ固定解除壁部
75a 係合爪
76,76’ 突出壁部(規制部)
81 ワイヤクリップ
【特許請求の範囲】
【請求項1】
車両のバンパの取付孔に取り付けられ、車両から障害物までの距離を計測するための距離センサであって、
車両の外部に信号を送信し、障害物に当たって戻ってくる反射信号を受信するセンサ本体と、
前記センサ本体を保持して、前記車両のバンパの取付孔に取り付けられるケース体と、
前記ケース体に接続されるハーネスを固定する機能を有し、前記ケース体に着脱可能に設けられるクランプと、
前記ケース体に嵌合される筒部を有し、その軸方向の一端部に前記取付孔の内径よりも大径のフランジ部が設けられたベゼルと、
樹脂材よりなり、前記ベゼルの筒部に嵌合されるリテーナと、を備え、
前記リテーナは、リング状の基部と、該基部における軸方向の端面から軸方向に沿って同一の側に延設される複数の腕部と、各腕部の先端から軸方向と交差する方向に突出して設けられ、それら突出部分の頂部を通る円の直径が前記取付孔の内径よりも大きく、前記取付孔に挿入されるときに開方向に弾性変形し、前記頂部が前記取付孔を通過した状態で閉方向に弾性復帰して前記取付孔の出口側の内周縁と係止される爪部とを有し、
前記クランプは、複数の前記爪部のうちいずれかの爪部と係合して該爪部が開方向に弾性変形する動作を規制する規制部を有することを特徴とする車両用距離センサ。
【請求項2】
前記各爪部は、対向する爪部単体が前記リテーナの軸方向視において所定の開き角度でV字状に配置されており、前記爪部単体は、前記取付孔を通過するときにそれらの開き角度を大きくする方向に弾性変形し、
前記クランプは、前記ケース体が前記車両のバンパの取付孔に取り付けられた後、該ケース体に対して前記リテーナの軸線方向へ近づけることで該ケース体に取り付けられ、前記規制部が前記リテーナの周方向にていずれかの前記爪部の爪部単体と近接配置される請求項1に記載の車両用距離センサ。
【請求項3】
前記クランプには、複数の係合爪が設けられ、前記各係合爪は前記ケース体に設けられた被係合部と係合する請求項2に記載の車両用距離センサ。
【請求項1】
車両のバンパの取付孔に取り付けられ、車両から障害物までの距離を計測するための距離センサであって、
車両の外部に信号を送信し、障害物に当たって戻ってくる反射信号を受信するセンサ本体と、
前記センサ本体を保持して、前記車両のバンパの取付孔に取り付けられるケース体と、
前記ケース体に接続されるハーネスを固定する機能を有し、前記ケース体に着脱可能に設けられるクランプと、
前記ケース体に嵌合される筒部を有し、その軸方向の一端部に前記取付孔の内径よりも大径のフランジ部が設けられたベゼルと、
樹脂材よりなり、前記ベゼルの筒部に嵌合されるリテーナと、を備え、
前記リテーナは、リング状の基部と、該基部における軸方向の端面から軸方向に沿って同一の側に延設される複数の腕部と、各腕部の先端から軸方向と交差する方向に突出して設けられ、それら突出部分の頂部を通る円の直径が前記取付孔の内径よりも大きく、前記取付孔に挿入されるときに開方向に弾性変形し、前記頂部が前記取付孔を通過した状態で閉方向に弾性復帰して前記取付孔の出口側の内周縁と係止される爪部とを有し、
前記クランプは、複数の前記爪部のうちいずれかの爪部と係合して該爪部が開方向に弾性変形する動作を規制する規制部を有することを特徴とする車両用距離センサ。
【請求項2】
前記各爪部は、対向する爪部単体が前記リテーナの軸方向視において所定の開き角度でV字状に配置されており、前記爪部単体は、前記取付孔を通過するときにそれらの開き角度を大きくする方向に弾性変形し、
前記クランプは、前記ケース体が前記車両のバンパの取付孔に取り付けられた後、該ケース体に対して前記リテーナの軸線方向へ近づけることで該ケース体に取り付けられ、前記規制部が前記リテーナの周方向にていずれかの前記爪部の爪部単体と近接配置される請求項1に記載の車両用距離センサ。
【請求項3】
前記クランプには、複数の係合爪が設けられ、前記各係合爪は前記ケース体に設けられた被係合部と係合する請求項2に記載の車両用距離センサ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図9】
【図10】

【図14】
【図16】
【図7】
【図8】
【図11】
【図12】
【図13】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図9】
【図10】
【図14】
【図16】
【図7】
【図8】
【図11】
【図12】
【図13】
【図15】
【公開番号】特開2013−67218(P2013−67218A)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願番号】特願2011−205577(P2011−205577)
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000004260)株式会社デンソー (27,639)
【公開日】平成25年4月18日(2013.4.18)
【国際特許分類】
【出願日】平成23年9月21日(2011.9.21)
【出願人】(000004260)株式会社デンソー (27,639)
[ Back to top ]