
車両用転舵制御装置および車両用転舵制御方法
【課題】ブレーキ液圧の変動によらず、転舵対象車輪の車輪転舵角を安定性を良くすることのできる車両用転舵制御装置および車両用転舵制御方法を提供する。
【解決手段】ブレーキ液圧補正演算部61は、ブレーキ液圧が上昇している場合において、ブレーキ液圧が減少したときにブレーキ液圧を増加させて補正したブレーキ液圧補正値を出力する。そして、路面摩擦係数推定部63は、このブレーキ液圧補正値に基づいて路面摩擦係数を推定する。これにより、操舵制御量が安定化しスプリットμ路における運転者による修正操舵を容易にする。
【解決手段】ブレーキ液圧補正演算部61は、ブレーキ液圧が上昇している場合において、ブレーキ液圧が減少したときにブレーキ液圧を増加させて補正したブレーキ液圧補正値を出力する。そして、路面摩擦係数推定部63は、このブレーキ液圧補正値に基づいて路面摩擦係数を推定する。これにより、操舵制御量が安定化しスプリットμ路における運転者による修正操舵を容易にする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用転舵制御装置および車両用転舵制御方法に関する。
【背景技術】
【0002】
車両の左右輪の路面摩擦係数(μ)がそれぞれ異なる路面、所謂スプリットμ路(μスプリット路とも言う)がある。このような路面における車両の制動時には、左右輪間の路面摩擦係数の差に起因する制動力差によって車両重心回りのヨーモーメントが発生する。この左右輪間の路面摩擦係数の差に起因する制動力差によって車両重心回りのヨーモーメントを打ち消す為に、運転者による操舵操作が必要となり、運転者にとって煩わしいという問題がある。
【0003】
上記問題を解決する手法の1つとして、特許文献1に記載の車両の操舵制御装置においては、次のように制御する。まず、左右一対の車輪の各々に対する路面摩擦係数を推定する。次に、その推定結果に基づき、同車輪間の制動力差を演算し、転舵対象車輪のスリップ角と総横力の関係を表す「スリップ角−総横力特性」を設定する。そして、このスリップ角−総横力特性と左右一対の車輪間の制動力差との関係に基づいて、車輪転舵角を設定する。このとき、前記の車両の操舵制御装置は、各輪のブレーキ液圧より各輪の制動力を演算し、左右間の制動力差を用いて車輪転舵角を設定する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−247056号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
各車輪のABS(Antilock Brake System)制御装置の作動等によって、マスターシリンダ圧の振動や、運転者のブレーキ操作量の変化等によってブレーキ液圧が変動する場合がある。この場合に、前記の操舵制御装置では、各輪のブレーキ液圧を使用しているため、設定する車輪転舵角の出力が安定しないという問題があった。
そこで、本発明は、前記の課題に鑑み、ブレーキ液圧の変動によらず、車輪転舵角の安定性を良くすることのできる車両用転舵制御装置および車両用転舵制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る車両用転舵制御装置は、前記の目的を達成するために、次のように構成する。
ブレーキ液圧補正演算部は、ブレーキ液圧が上昇している場合において、ブレーキ液圧が減少したときにブレーキ液圧を増加して補正したブレーキ液圧補正値を出力する。そして、路面摩擦係数推定部は、このブレーキ液圧補正値に基づいて路面摩擦係数を推定する。
【発明の効果】
【0007】
本発明に係る車両用転舵制御装置および車両用転舵制御方法によれば、例えば、ABS制御の作動によるマスターシリンダ圧の変動や、運転者のポンピングブレーキ操作等によるブレーキ液圧の変動が生じた場合でも、推定する路面摩擦係数への影響を少なくすることができる。よって、操舵制御量が安定化し、スプリットμ路における運転者による修正操舵を容易にすることができる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態に係る車両用転舵制御装置の構成を示す模式図である。
【図2】車両用転舵制御装置の転舵制御コントローラの構成を示すブロック図である。
【図3】車両用転舵制御装置の目標修正転舵角演算部の構成を示すブロック図である。
【図4】車両用転舵制御装置における転舵制御コントローラで実行する処理の流れを示すフローチャートである。
【図5】目標修正転舵角演算部における目標修正転舵角演算処理の流れを示すフローチャートである。
【図6】路面摩擦係数の第1推定処理の流れを示すフローチャートである。
【図7】路面摩擦係数の第2推定処理の流れを示すフローチャートである。
【図8】路面摩擦係数の第3推定処理の流れを示すフローチャートである。
【図9】ブレーキ液圧とブレーキ液圧補正値とブレーキ液圧補正値とに含まれるヒステリシス特性の関係を示すグラフである。
【図10】路面摩擦係数推定部におけるブレーキ液圧補正値に基づく第1の路面摩擦係数の推定方法を示すグラフである。
【図11】路面摩擦係数推定部におけるブレーキ液圧補正値に基づく第2の路面摩擦係数の推定方法を示すグラフである。
【図12】路面摩擦係数推定部におけるブレーキ液圧補正値に基づく第3の路面摩擦係数の推定方法を示すグラフである。
【図13】常時最大ブレーキ液圧を保持する補正手法を用いたシミュレーションによるスプリットμ路(路面摩擦係数=1.1/0.1)における制動時のドライバ修正操舵の時系列変化を示すグラフである。
【図14】変形例に係る車両用転舵制御装置の構成を示す模式図である。
【図15】変形例に係る車両用転舵制御装置の転舵制御コントローラの構成を示すブロック図である。
【発明を実施するための形態】
【0009】
以下に、本発明の好適な実施形態(実施例)を添付図面に基づいて説明する。
(構成)
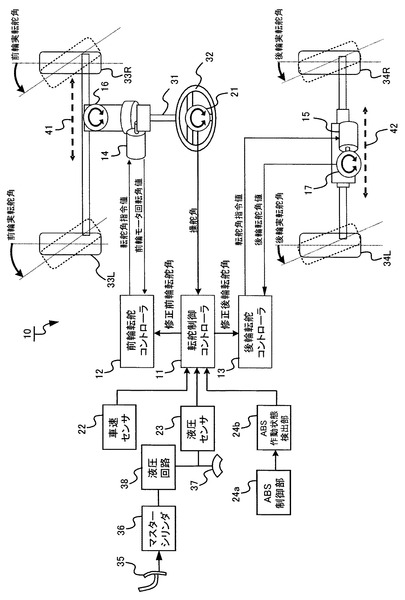
まず、図1を参照して、本発明の実施形態に係る車両用転舵制御装置10の構成を説明する。図1は、本発明の実施形態に係る車両用転舵制御装置10の構成を示す模式図である。
図1に示した車両は、転舵制御コントローラ11、前輪転舵コントローラ12、後輪転舵コントローラ13、前輪転舵アクチュエータ14、および後輪転舵アクチュエータ15を備える。さらに、車両は、液圧センサ23、およびABS作動状態検出部24bを備える。そして、車両用転舵制御装置10に、操舵角センサ21、車速センサ22、ABS制御部24aを接続する。
【0010】
図1に示したように、コラムシャフト31は、ステアリングホイール32と、前輪33L,33Rを転舵する前輪転舵機構41とを連結する。そして、そのコラムシャフト31に操舵角センサ21と前輪転舵アクチュエータ14とを設ける。
操舵角センサ21は、ステアリングホイール32の操舵角を検出する。操舵角センサ21は、例えばコラムシャフト31に設ける。操舵角センサ21は、例えばコラムシャフト31の回転角を検出するパルスエンコーダである。
【0011】
車速センサ22は、車体速(車速)を検出する。車速センサ22は、例えば各車輪に設け、各車輪速の平均値等から車速を検出する。
液圧センサ23は、マスターシリンダ36から発生したブレーキ37のブレーキ液圧を検出する。図示するように、液圧センサ23は、ブレーキ37とブレーキ37を作動するための力の伝達を行う液圧回路38との間の液圧を検出する。
なお、図示しないが、ブレーキ37は、前輪33L,33Rおよび後輪34L,34Rのそれぞれに備える。また、液圧センサ23は、各輪のブレーキ37に対応して複数備え、各輪のブレーキ液圧をそれぞれ検出する。
【0012】
ABS制御部24aは、制動時の車輪のロックに応じてABS(Antilock Brake System)制御を行う。具体的には制動時に車輪のロック(車輪速0)が発生した場合には、ロックが発生した車輪のブレーキ液圧を減圧し、このブレーキ液圧減圧によって車輪速加速度が0以上となった場合にブレーキ液圧を保持し、車輪速が所定値以上となった場合にはブレーキ液圧を増圧する、一般的に知られている(公知の)ABS制御を行う。なお、ABS制御としてはその他に、例えば車輪のスリップ率が所定値以上でブレーキ液圧を減圧し、このブレーキ液圧減圧によって車輪速加速度が0以上となった場合にブレーキ液圧を保持し、スリップ率が所定値未満となった場合にはブレーキ液圧を増圧する等、他の一般的に知られているABS制御であっても良い。
【0013】
ABS作動状態検出部24bは、ABS制御部24aの作動状態を検出し、ABS制御が作動中である場合に、ABS制御が作動中であることを示すABS作動フラグを転舵制御コントローラ11に対して出力するものである。
転舵制御コントローラ11は、操舵角センサ21が検出した操舵角と、車速センサ22が検出した車速とに応じて、操向輪である前輪33L,33Rおよび後輪34L,34Rの修正前輪転舵角と修正後輪転舵角とを演算して出力する。そして、転舵制御コントローラ11は、修正前輪転舵角を前輪転舵コントローラ12に出力し、修正後輪転舵角を後輪転舵コントローラ13に出力する。
【0014】
前輪転舵コントローラ12は、転舵制御コントローラ11が演算した修正前輪転舵角と、前輪転舵角センサ16が検出した実際の前輪転舵角との偏差を無くすような転舵角指令値を算出する。前輪転舵コントローラ12は、算出した転舵角指令値を前輪転舵アクチュエータ14に出力する。
後輪転舵コントローラ13は、転舵制御コントローラ11が演算した修正後輪転舵角と、後輪転舵角センサ17が検出した実際の後輪転舵角との偏差を無くすような転舵角指令値を算出する。後輪転舵コントローラ13は、算出した転舵角指令値を後輪転舵アクチュエータ15に出力する。
【0015】
前輪転舵アクチュエータ14は、前輪転舵コントローラ12からの転舵角指令値に応じて、コラムシャフト31を介して入力する回転を、減速または増速する可変ギヤ比制御を行う。すなわち、転舵制御コントローラ11が演算した修正前輪転舵角と、前輪転舵角センサ16が検出した実際の前輪転舵角との偏差を無くす様に、コラムシャフト31を介して入力する回転を減速または増速して前輪転舵機構41へ出力する。これにより、前輪33L,33Rの転舵角に対するステアリングホイール32の操舵角の比であるステアリングギア比を可変に制御する。
後輪転舵アクチュエータ15は、後輪転舵コントローラ13からの転舵角指令値により、後輪34L,34Rの転舵角を可変に制御する。
【0016】
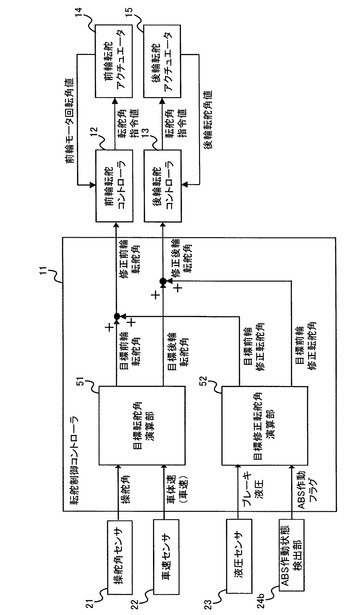
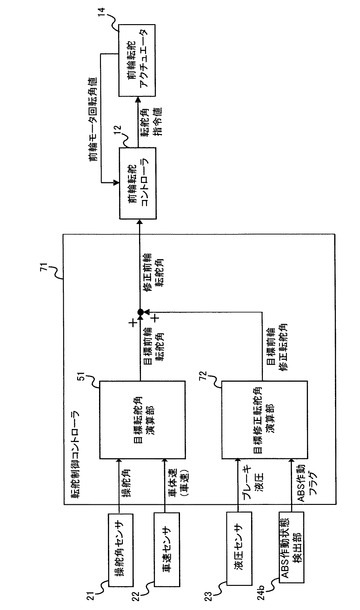
次に、図2を参照して、車両用転舵制御装置10の転舵制御コントローラ11の構成を説明する。図2は、車両用転舵制御装置10の転舵制御コントローラ11の構成を示すブロック図である。
転舵制御コントローラ11は、目標転舵角演算部51および目標修正転舵角演算部52を備える。
目標転舵角演算部51は、操舵角センサ21からの操舵角θと車速センサ22からの車速Vとに基づいて、2輪モデルを用いて車両パラメータを演算し、目標前輪転舵角および目標後輪転舵角を演算する。
目標修正転舵角演算部52は、液圧センサ23からのブレーキ液圧とABS作動状態検出部24bからのABS作動フラグとに基づいて、2輪モデルを用いて車両パラメータを演算し、目標前輪修正転舵角および目標後輪修正転舵角を演算する。
なお、2輪モデルを用いた車両パラメータの算出方法については、図3に示す目標修正転舵角演算部の構成を説明した後に説明する。
【0017】
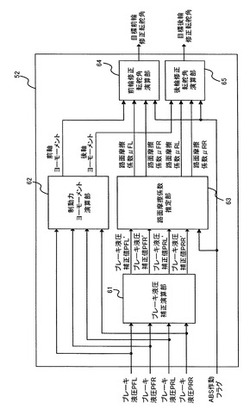
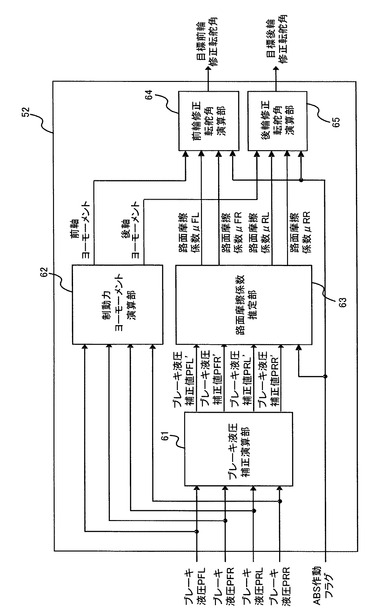
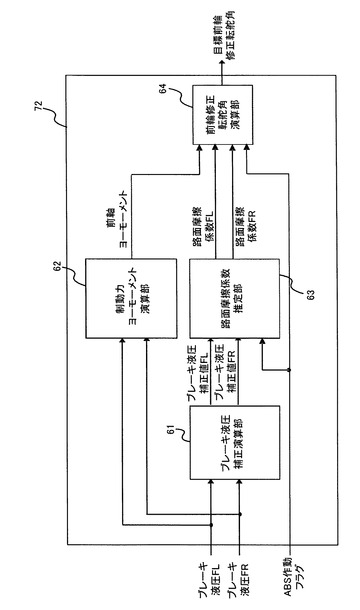
続いて、図3を参照して、車両用転舵制御装置10の目標修正転舵角演算部52の構成を説明する。図3は、車両用転舵制御装置10の目標修正転舵角演算部52の構成を示すブロック図である。
目標修正転舵角演算部52は、ブレーキ液圧補正値演算部61、制動力ヨーモーメント演算部62、路面摩擦係数推定部63、前輪修正転舵角演算部64、および後輪修正転舵角演算部65を備える。
【0018】
ブレーキ液圧補正値演算部61は、前輪33L,33Rおよび後輪34L,34Rのそれぞれに設けた液圧センサ23が検出した、前輪33L,33Rおよび後輪34L,34Rのそれぞれに対応するブレーキ液圧PFL,PFR,PRL,PRRを補正する。ブレーキ液圧補正値演算部61は、補正した各ブレーキ液圧PFL,PFR,PRL,PRRを、ブレーキ液圧補正値PFL’,PFR’,PRL’,PRR’として出力する。
【0019】
なお、ここでいうブレーキ液圧補正値PFL’,PFR’,PRL’,PRR’とは、制動のために用いる実ブレーキ液圧とは異なる。ブレーキ液圧補正値PFL’,PFR’,PRL’,PRR’は、後述する路面摩擦係数推定部63において各車輪に対応する路面摩擦係数μFL,μFR,μRL,μRRを推定するために用いる。
制動力ヨーモーメント演算部62は、液圧センサ23が検出したブレーキ液圧PFL,PFR,PRL,PRRに基づいて、前軸ヨーモーメントおよび後軸ヨーモーメントを演算して出力するものである。
【0020】
路面摩擦係数推定部63は、ブレーキ液圧補正値演算部61が演算したブレーキ液圧補正値PFL’,PFR’,PRL’,PRR’と、ABS作動状態検出部24bからのABS作動フラグとに基づいて、前輪33L,33Rおよび後輪34L,34Rのそれぞれに対応する路面摩擦係数μFL,μFR,μRL,μRRを推定して出力する。
前輪修正転舵角演算部64は、制動力ヨーモーメント演算部62が出力した前輪ヨーモーメントと、路面摩擦係数推定部63が出力した路面摩擦係数μFL,μFRと、ABS作動状態検出部24bのABS作動フラグとから、目標前輪修正転舵角を演算する。
【0021】
後輪修正転舵角演算部65は、制動力ヨーモーメント演算部62が出力した後輪ヨーモーメントと、路面摩擦係数推定部63が出力した路面摩擦係数μRL,μRRと、ABS作動状態検出部24bのABS作動フラグとから、目標後輪修正転舵角を演算する。
ここで、転舵制御コントローラ11における各演算部および推定部が演算する各車両パラメータの算出方法について説明する。
【0022】
(車両パラメータの算出)
一般に、2輪モデルを仮定すると、車両のヨー角加速度φ″と横加速度Vy´とは、下記(1)式および(2)式のようになる。
φ″=a11φ´+a12Vy+bf1θ+br1δ ………(1)
Vy´=a21φ´+a22Vy+bf2θ+br2δ ………(2)
【0023】
以上の式において、a11、a12、a21、a22、bf1、bf2は下記(3)式および(4)式のようになる。
a11=−2(Kf・Lf2+Kr・Lr2)/(Iz・Vx),
a12=−2(Kf・Lf−Kr・Lr)/(Iz・Vx),
a21={−M・Vx2−2(Kf・Lf−Kr・Lr)}/(M・Vx),
a22=−2(Kf+Kr)/(M・Vx) ………(3)
bf1=2Kf・Lf/(Iz・N),
bf2=2Kf/M・N,
br1=−2Kr・Lr/Iz,
br2=2Kr/M ………(4)
【0024】
ここで、各記号は、以下のパラメータを表している。
φ´:ヨーレート,
Vy:横速度,
Vx:前後速度,
θ:目標前輪転舵角(運転者操舵角),
δ:目標後輪転舵角,
Iz:車両慣性モーメント
M:車両重量
Lf:前軸〜重心点距離,
Lr:重心点〜後軸距離,
N:ギア比,
Kf:前輪コーナリングパワー,
Kr:後輪コーナリングパワー
【0025】
状態方程式より前輪操舵に対するヨーレート、横速度の伝達関数を求めると、下記(5)式および(6)式となる。
φ´(s)/θ(s)=Hf(s)/G(s)
={bf1・s+(a12・bf2−a22・bf1)}/G(s) ………(5)
Vy(s)/θ(s)={bf2・s+(a21・bf1−a11・bf2)}/G(s) ………(6)
【0026】
前記(5)式において、G(s)=s2−(a11+a22)s+(a11・a22−a12・a21)とすると、前記(5)式で示したヨーレート伝達関数は下記(7)式のようになる。
φ´(s)={ωφ´(V)2 ・(Tφ´(V)s+gφ´(V))}・θ(s)
/{s2+2ζφ´(V)・ωφ´(V)・s+ωφ´(V)2} ………(7)
ここで、
gφ´(V)=(a12・bf2−a22・bf1)/(a11・a22−a12・a21),
ωφ´(V)2=a11・a22−a12・a21,
2ζφ´(V)・ωφ´(V)=−a11−a22,
Tφ´(V)=bf1/(a11・a22−a12・a21)
である。
【0027】
また、同様に前記(6)式で示した横速度伝達関数は下記(8)式のようになる。
V(s)={ωVy(V)2 ・(TVy(V)s+gVy(V))}・θ(s)
/{s2+2ζVy(V)・ωVy(V)・s+ωVy(V)2} ………(8)
ここで、
gVy(V)=(a21・bf1−a11・bf2)/(a11・a22−a12・a21),
ωVy(V)2=a11・a22−a12・a21,
2ζVy(V)・ωVy(V)=−a11−a22,
TVy(V)=bf2/(a11・a22−a12・a21)
である。
以上から、車両パラメータgφ´(V)、ζφ´(V)、ωφ´(V)、Tφ´(V)、gVy(V)、ζVy(V)、ωVy(V)、TVy(V)を求める。
【0028】
次に、目標ヨーレートφ´tおよび目標横速度Vytの算出方法について、具体的に説明する。
(目標ヨーレートの算出)
先ず、目標ヨーレートの算出方法について説明する。なお、以下の説明において、「t」の添え字はパラメータが目標値であることを示すものである。
前記(7)式より、目標ヨー角加速度φ″t(s)は次式のようになる。
φ″t(s)=−2ζφ´t(V)・ωφ´t(V)・φ´t(s)
+ωφ´t(V)2・Tφ´(V)・θ(s)
+(1/s)ωφ´t(V)2・(gφ´t(V)・θ(s)−φ´t(s)) ………(9)
【0029】
ここで、目標ヨーレートのパラメータ、gφ´t(V)、ωφ´t(V)、ζφ´t(V)、Tφ´(V)は、下記(10)式のようになる。
gφ´t(V)=gφ´(V)×yrate_gain_map,
ωφ´t(V)=ωφ´(V)×yrate_omegn_map,
ζφ´t(V)=ζφ´(V)×yrate_zeta_map,
Tφ´t(V)=Tφ´(V)×yrate_zero_map ………(10)
但し、yrate_gain_map,yrate_omegn_map,yrate_zeta_map,yrate_zero_mapは、チューニングパラメータである。
以上の結果から、目標ヨーレートφ´t(s)は、次式のようになる。
φ´t(s)=(1/s)・φ″t(s) ………(11)
【0030】
(目標横速度の算出)
次に、目標横速度の算出方法について説明する。
前記(8)式より、目標横加速度Vy´t(s)は次式のようになる。
Vy´t(s)=−2ζVyt(V)・ωVyt(V)・Vyt(s)
+ωVyt(V)2・TVy(V)・θ(s)
+(1/s)ωVyt(V)2・(gVyt(V)・θ(s)−Vyt(s)) ………(12)
【0031】
ここで、目標横速度のパラメータ、gVyt(V)、ωVyt(V)、ζVyt(V)、TVy(V)は、下記(13)式のようになる。
gVyt(V)=gVy(V)×vy_gain_map,
ωVyt(V)=ωVy(V)×vy_omegn_map,
ζVyt(V)=ζVy(V)×vy_zeta_map,
TVyt(V)=TVy(V)×vy_zero_map ………(13)
但し、vy_gain_map,vy_omegn_map,vy_zeta_map,vy_zero_mapは、チューニングパラメータである。
以上の結果から、目標横速度Vyt(s)は、次式のようになる。
Vyt(s)=(1/s)・Vy´t(s) ………(14)
【0032】
次に目標ヨーレート目標ヨーレートφ´t(s)、目標横速度Vyt(s)から目標前輪転舵角θと目標後輪転舵角δを算出する。
φ″=a11φ´+a12Vy+bf1θ+br1δ ………(15)
Vy´=a21φ´+a22Vy+bf2θ+br2δ ………(16)
から、目標前輪転舵角θは、
θ=1/(bf1・br2−bf2・br1)[br2{φ″−(a11・φ´+a12・Vy)}−br1{Vy´−(a21・φ´+a22・Vy)}] ………(17)
となる。
同様に、目標後輪転舵角δは、
δ=1/(bf1・br2−bf2・br1)[−bf2{φ″−(a11・φ´+a12・Vy)}+bf1{Vy´t−(a21・φ´+a22・Vy)}] ………(18)
となる。
【0033】
(ヨーモーメントの算出)
なお、制動力によって車両に発生するヨーモーメントはブレーキ液圧等によって演算することができる。前輪車軸中心回りに発生するヨーモーメントMB_frontは、
MB_front=(FB_FL−FB_FR)・Tf/2
FB_FL=μB・PFL・S・(r/R)
FB_FR=μB・PFR・S・(r/R)
となる。同様に後輪車軸中心回りに発生するヨーモーメントMB_rearは、
MB_rear=(FB_RL−FB_RR)・Tr/2
FB_RL=μB・PRL・S・(r/R)
FB_RR=μB・PRR・S・(r/R)
となる。
【0034】
ここで、各記号は、以下のパラメータを表している。
FB_FL,FB_FR,FB_RL,FB_RR:各輪制動力,
PFL,PFR,PRL,PRR:各輪ブレーキ液圧,
Tf,Tr:前後トレッド,
μB:ブレーキパッド摩擦係数,
R:タイヤ半径,
r:ブレーキロータ有効半径,
S:ブレーキピストン面積
【0035】
(目標前輪修正転舵角の算出)
また、制動力ヨーモーメント演算部において算出した前輪車軸回りのヨーモーメントを打ち消す目標前輪修正転舵角θfは、
θf=−(1/bf1)・(1/IZ)・MB_front
となる。
ここでIZは、車両重心鉛直軸回りの慣性モーメントである。ただし、この目標前輪修正転舵角θfは左右の路面摩擦係数μ値が均等かつμ=1.1である場合を想定している。このため、左右の路面摩擦係数μが異なる場合は、路面摩擦係数μ値に反比例したゲインを目標前輪修正転舵角に乗じて補正する。前左右輪における修正操舵ゲインをそれぞれG(μFL)、G(μFR)とすれば、目標修正前輪転舵角は次式のようになる。
θf´=[G(μFL)+G(μFR)]・θf
【0036】
(目標後輪修正転舵角の算出)
また、後輪車軸回りのヨーモーメントを打ち消す目標後輪修正転舵角δrは、
δr=−(1/br1)・(1/IZ)・MB_rear
で表すことができる。同様に、後左右輪における修正操舵ゲインをそれぞれG(μRL)、G(μRR)とすれば、目標修正後輪転舵角は、次式のようになる。
δr´=[G(μRL)+G(μRR)]・δr
【0037】
(動作)
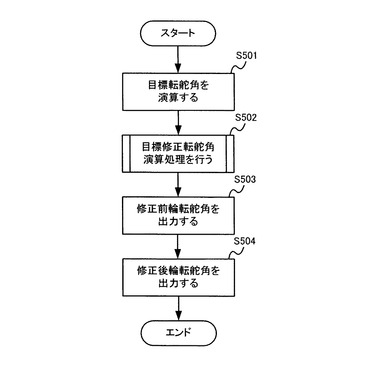
ここで、図4を参照して、車両用転舵制御装置10における転舵制御コントローラ11で実行する処理を説明する。図4は、車両用転舵制御装置10における転舵制御コントローラ11で実行する処理の流れを示すフローチャートである。
転舵制御コントローラ11の目標転舵角演算部51は、操舵角センサ21からの操舵角θと車速センサ22からの車速Vとに基づいて、車両パラメータを演算し、目標前輪転舵角および目標後輪転舵角を演算する(ステップS501)。
【0038】
次に、目標修正転舵角演算部52のブレーキ液圧補正演算部61は、後述する目標前輪修正転舵角および目標後輪修正転舵角を演算する目標修正転舵角演算処理を行う(ステップS502)。
転舵制御コントローラ11は、目標前輪転舵角と目標前輪修正転舵角とを加算した値と実際の前輪転舵角との偏差を修正前輪転舵角として前輪転舵コントローラ12に出力する(ステップS503)。加えて、転舵制御コントローラ11は、目標後輪転舵角と目標後輪修正転舵角とを加算した値と実際の後輪転舵角との偏差を修正後輪転舵角として転舵コントローラ13に出力する(ステップS504)。
【0039】
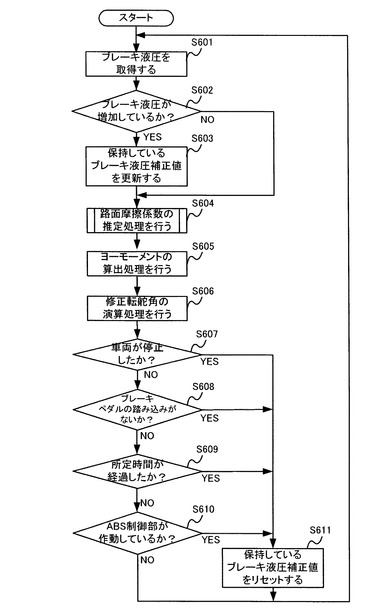
続いて、図5を参照して、ステップS502の目標修正転舵角演算部52における目標修正転舵角演算処理の流れを説明する。図5は、目標修正転舵角演算部52における目標修正転舵角演算処理の流れを示すフローチャートである。
まず、ブレーキ液圧補正値演算部61は、液圧センサ23から各ブレーキ液圧を取得する(ステップS601)。
ここで、ブレーキ液圧が増加している場合には(ステップS602の「YES」の分岐)、保持しているブレーキ液圧値をブレーキ液圧の最大値で更新する(ステップS603)。
【0040】
また、ブレーキ液圧が増加していない場合には(ステップS602の「NO」の分岐)、そのときの路面摩擦係数の推定処理に用いるブレーキ液圧を、保持している実ブレーキ液圧の最大値として補正する。つまり、この最大値を、ブレーキ液圧補正値として路面摩擦係数推定部63に出力する。
そして、路面摩擦係数推定部63は、ブレーキ液圧補正値演算部61が出力したブレーキ液圧補正値PFL’,PFR’,PRL’,PRR’に基づいて、路面摩擦係数の推定処理を行う(ステップS604)。制動力ヨーモーメント62は、液圧センサ23が検出したブレーキ液圧PFL,PFR,PRL,PRRに基づいて、前軸ヨーモーメントおよび前軸ヨーモーメントを演算する(ステップS605)。
【0041】
前輪転舵角演算部64は、制動力ヨーモーメント62が演算した前軸ヨーモーメントと、路面摩擦係数推定部63が推定した路面摩擦係数μFL,μFRと、ABS作動フラグとから目標前輪修正転舵角を算出する。また、前輪転舵角演算部65は、制動力ヨーモーメント62が演算した後軸ヨーモーメントと路面摩擦係数推定部63が推定した路面摩擦係数μRL,μRR、ABS作動フラグとから目標後輪修正転舵角を算出する(ステップS606)。
【0042】
ステップS607〜S610に示したブレーキ液圧補正値のリセット条件処理に合致するまで、ステップS601に戻り、処理を繰り返す。
また、車両が停止した場合(ステップS607の「YES」の分岐)、またはブレーキペダル35の踏み込み操作がなくなった場合には(ステップS608の「YES」の分岐)、保持しているブレーキ液圧値を初期値(ゼロ)にリセットして(ステップS611)、ステップS601に戻り、処理を繰り返す。
同様に、実ブレーキ液圧の最大値を保持し始めてから所定時間が経過した場合や(ステップS609の「YES」の分岐)、ABS制御が作動状態となった場合にも(ステップS610の「YES」の分岐)、保持しているブレーキ液圧値を初期値にリセットして、ステップS601に戻り、処理を繰り返す。
【0043】
続いて、図6〜図8を参照して、ステップS604の路面摩擦係数推定部63における路面摩擦係数の推定処理の流れを説明する。
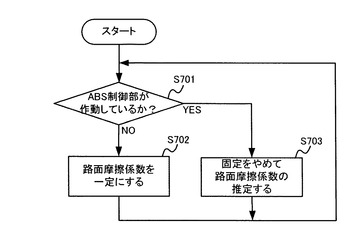
まず、図6は、路面摩擦係数の第1推定処理の流れを示すフローチャートである。
路面摩擦係数推定部63は、ABS制御部24aが作動していない場合には(ステップS701の「NO」の分岐)、前輪転舵角演算部64および後輪転舵角演算部65に出力する路面摩擦係数を路面状況に応じて設定した所定値で一定にする(ステップS702)。また、ステップS701に処理が戻り、路面摩擦係数推定部63は、ABS制御部24aが非作動状態から作動状態になった場合には(ステップS701の「YES」の分岐)、前輪転舵角演算部64および後輪転舵角演算部65に出力する路面摩擦係数を所定値で一定にするのをやめる。そして、路面摩擦係数推定部63は、ブレーキ液圧補正値から推定した路面摩擦係数を前輪転舵角演算部64および後輪転舵角演算部65に出力する(ステップS703)。
【0044】
その後、ステップS701に処理が戻り、ABS制御部24aの作動状態を判定し続ける。そして、ABS制御部24aが再び作動状態から非作動状態になった場合には(ステップS701の「NO」の分岐)、前輪転舵角演算部64および後輪転舵角演算部65に出力する路面摩擦係数を所定値で一定にする(ステップS702)。
【0045】
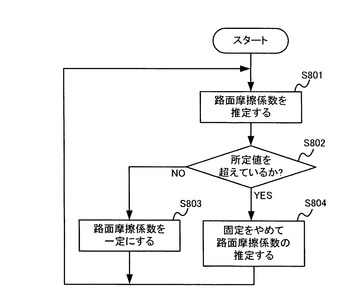
また、図7は、路面摩擦係数の第2推定処理の流れを示すフローチャートである。
まず、路面摩擦係数推定部63は、ブレーキ液圧補正値に基づいて路面摩擦係数を推定する(ステップS801)。このとき、路面摩擦係数推定部63は、推定した路面摩擦係数が所定値を超えていない場合には(ステップS802の「NO」の分岐)、前輪転舵角演算部64および後輪転舵角演算部65に出力する路面摩擦係数を所定値で一定にする(ステップS803)。そして、ステップS801に戻り、処理を繰り返す。
また、ステップS802で、推定した路面摩擦係数が所定値を超えている場合には(ステップS802の「YES」の分岐)、所定値に代えてブレーキ液圧によって推定した路面摩擦係数を前輪転舵角演算部64および後輪転舵角演算部65に出力して(ステップS804)、ステップS801に戻り、処理を繰り返す。
【0046】
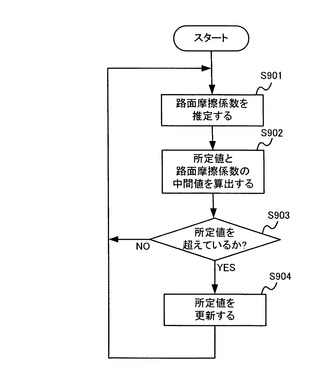
続いて、図8は、路面摩擦係数の第3推定処理の流れを示すフローチャートである。
まず、路面摩擦係数推定部63は、ブレーキ液圧補正値に基づいて路面摩擦係数を推定する(ステップS901)。このとき、路面摩擦係数推定部63は、推定した路面摩擦係数と、設定した数値の大きさが段階的に異なる複数の所定値との平均値を算出する。路面摩擦係数推定部63は、この平均値を路面摩擦係数として前輪転舵角演算部64および後輪転舵角演算部65に出力する(ステップS902)。なお、この所定値は、数値の最も小さいものから順に用いると共に、推定した路面摩擦係数の値に最も近く且つその路面摩擦係数よりも大きい値とする。ここで、推定した路面摩擦係数が現段階の所定値を超えていなければ(ステップS903の「NO」の分岐)、その所定値を平均値の算出に用いる所定値として保持し、ステップS901に戻り、処理を繰り返す。
【0047】
また、ステップS903で、推定した路面摩擦係数が所定値を超えていれば(ステップS903の「YES」の分岐)、現段階の所定値をそれよりも上の段階のものに更新して(ステップS904)、ステップS901に戻り、処理を繰り返す。例えば、1段階上のものに更新しても推定した路面摩擦係数より大きな数値とならない場合は、大きな数値となるようにそれよりも上の段階のものに更新する。
【0048】
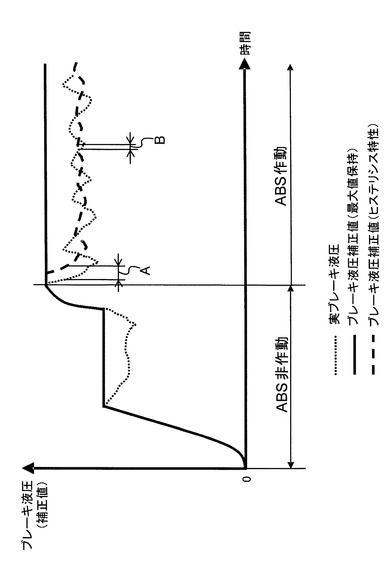
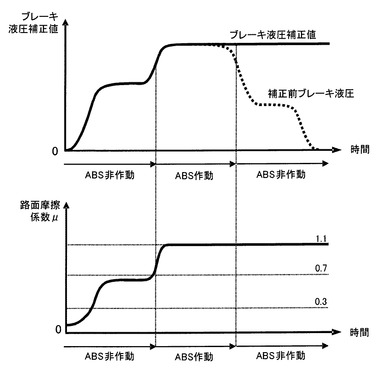
続いて、図9を参照して、ブレーキ液圧補正値演算部61におけるブレーキ液圧の補正演算方法を説明する。図9は、ブレーキ液圧とブレーキ液圧補正値とブレーキ液圧補正値とに含まれるヒステリシス特性の関係を示すグラフである。
図9に示したグラフの縦軸はブレーキ液圧補正値を示し、横軸は時間を示す。また、図中の点線は車両の制動に用いる実ブレーキ液圧を示し、実線は保持しているブレーキ液圧補正値を示し、破線はヒステリシス特性を含むブレーキ液圧補正値をそれぞれ示す。
【0049】
まず、ABS制御部24aが非作動の状態における補正演算方法について説明する。ブレーキ液圧補正演算部61は、図4に示したように実ブレーキ液圧の上昇中に、実ブレーキ液圧が減少方向に変動したときに、そのときの路面摩擦係数の推定に用いるブレーキ液圧として実ブレーキ液圧を増加補正する。これが、図中に実線で示したようなブレーキ液圧補正値となる。
【0050】
具体的に、ブレーキ液圧補正演算部61は、ブレーキ液圧の上昇中において、減少方向への変動が無い期間または保持した最大値を超える期間は、実ブレーキ液圧をそのままブレーキ液圧補正値として出力する。また、ブレーキ液圧補正演算部61は、減少方向への変化が生じている期間においては、保持した最大値をブレーキ液圧補正値として出力する。
【0051】
従って、ブレーキ液圧補正演算部61は、保持しているブレーキ液圧の最大値よりも実ブレーキ液圧が減少している場合は、保持しているブレーキ液圧値を更新せず、それまでの最大値を保持し続ける。なお、ブレーキ液圧補正演算部61は、車両が停車または運転者のブレーキペダル35の踏み込み操作がなくなった場合に、保持しているブレーキ液圧の最大値を初期値(ゼロ)にリセットする。
【0052】
次に、ABS制御部24aが作動状態における補正演算方法について説明する。ABS制御部24aが非作動状態から作動状態になった場合、補正の方法として3つの方法がある。
1つ目は、ブレーキ液圧の最大値を保持し、ABSの作動状態に関わらず常にブレーキ液圧の最大値をブレーキ液圧補正値とする方法である。2つ目は、ABSの作動前は、常にブレーキ液圧の最大値をブレーキ液圧補正値とし、ABS作動後は保持したブレーキ液圧の最大値を初期値にリセットすると共に一切の補正を行わない方法である。3つ目は、ABS作動後のブレーキ液圧に対してヒステリシス特性を持たせることで、ABS作動に起因するブレーキ液圧の振動を補正する方法である。
【0053】
特に3つ目の手法でいうヒステリシス特性とは、運転者の修正操舵の負担量等を考慮して意図的に施したブレーキ液圧補正値の変化特性のことである。ブレーキ液圧補正値演算部61は、例えば実ブレーキ液圧が増加しているときよりも減少しているときの方が、図中に示したように実ブレーキ液圧のブレーキヒステリシスとブレーキ液圧補正値のブレーキヒステリシスとの幅A(偏差)が大きくなるようにブレーキ液圧補正値を演算する。
【0054】
また、ブレーキ液圧補正値演算部61は、例えば実ブレーキ液圧の変化速度が速くなるのに従って、図中に示したように実ブレーキ液圧のブレーキヒステリシスとブレーキ液圧補正値のブレーキヒステリシスとの幅B(偏差)が小さくなるようにブレーキ液圧補正値を演算する。
このように、ブレーキ液圧に対して昇圧速度依存のヒステリシス特性を持たせる補正、つまり昇圧速度が大きい場合にはヒステリシス幅を小さくする。一方、昇圧速度が小さい場合には、ヒステリシス幅を大きくする。このような補正を施すことで、液圧変動に対する安定性を確保することができる。なお、上述した3つの補正手法については、運転者の修正操舵の負担量や、車両姿勢の安定性等の諸条件を考慮して選択すれば良い。
【0055】
ここで、図10〜図12を参照して、路面摩擦係数推定部63におけるブレーキ液圧補正値に基づく路面摩擦係数の推定方法を説明する。図10〜図12は、路面摩擦係数推定部63におけるブレーキ液圧補正値に基づく第1〜第3の路面摩擦係数の推定方法を示すグラフである。
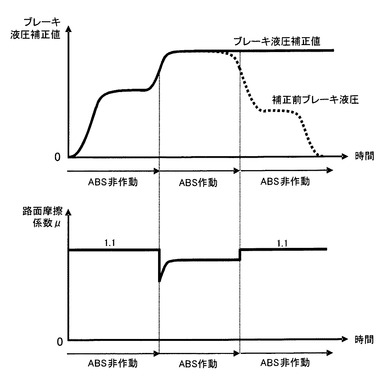
図10に示した路面摩擦係数の第1推定方法において、路面摩擦係数推定部63は、ABS制御が非作動状態であるとき、車輪における路面摩擦係数を路面状況に応じて設定した所定値(例えば1.1)で一定にする。なお、路面摩擦係数推定部63は、ABS制御が非作動状態から作動状態になったとき、ABS制御が作動状態であるときのブレーキ液圧から路面摩擦係数を推定する。これにより、転舵制御量が安定化し、制御による車両の不安定挙動を抑えることができる。
【0056】
つまり、図10に示したように、ブレーキ操作開始時は、ブレーキ液圧の変動が急である。このため、そのブレーキ液圧をそのまま用いると路面摩擦係数の推定誤差が大きくなる。そこで、第1の推定方法では、路面摩擦係数を所定値で一定にしておくことにより、ブレーキ液圧の上昇中における推定誤差を少なくする。そして、より適正な操舵制御量を出力しつつ、車両挙動の安定化を図ることができる。
【0057】
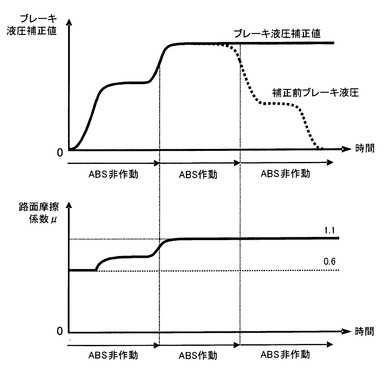
一方、図11に示した路面摩擦係数の第2推定方法において、路面摩擦係数推定部63は、ブレーキ液圧の上昇前において、車輪における路面摩擦係数の初期値として路面状況に応じて設定した所定値(例えば0.6)を前輪転舵角演算部64および後輪転舵角演算部65に出力する。そして、路面摩擦係数推定部63は、ブレーキ液圧補正値によって推定した路面摩擦係数が前記設定した所定値以下であるときは、路面摩擦係数をその所定値で一定にする。また、路面摩擦係数推定部63は、推定した路面摩擦係数が所定値を越えるときは、その所定値に代えて推定した路面摩擦係数を出力する。
【0058】
上述したように、ブレーキ操作開始時は、ブレーキ液圧の変動が特に急である。このため、ブレーキ液圧の変動も著しく急となり、路面摩擦係数の推定誤差が大きくなる。そこで、第2の推定方法では、ブレーキ液圧の立ち上がりにおいて、推定した路面摩擦係数が所定値を超えるまでは、路面摩擦係数を所定値で一定にしておく。これにより、ブレーキ液圧の上昇中における推定誤差をより少なくすることができる。
なお、前記の所定値は、路面状態等に合わせて任意の値を設定して良い。例えば、ウェット路面相当に合わせて0.8としても良い。これにより、ABS非作動時における推定誤差を少なくして、より適正な操舵制御量を出力しつつ車両挙動の安定化を図ることができる。
【0059】
また、図12に示した路面摩擦係数の第3推定方法において、路面摩擦係数推定部63は、各車輪における路面摩擦係数を、ブレーキ液圧補正値から推定した路面摩擦係数と路面状況に応じて設定した所定値(例えば0.3)との平均値とする。なお、この平均値の算出に用いる所定値は、同じく平均値の算出に用いる推定した路面摩擦係数よりも大きい所定値とする。
【0060】
つまり、第3推定方法においては、常に、ブレーキ液圧補正値から推定した路面摩擦係数と、推定した路面摩擦係数よりも大きい所定値との平均値を、路面摩擦係数とする。このため、仮にブレーキ液圧補正値から推定した路面摩擦係数が実際の路面摩擦係数より離れた値であったとしても、路面摩擦係数の推定に平均値を採用することによって、ブレーキ液圧の上昇中における推定誤差を少なくする。
【0061】
また、所定値はブレーキ液圧補正値に応じて1つのみならず複数設けても良い。例えば、ウエット路面以外にも、凍結路面や舗装道路、未舗装道路、山道等のドライブモードに合わせて、路面摩擦係数を設定することができる。所定値をブレーキ液圧補正値に応じて複数設けることによって、本来の路面摩擦係数と推定した路面摩擦係数との推定精度誤差を更に少なくすることができる。
【0062】
例えば、図示するように、所定値を例えば0.3、0.7、1.1の均等間隔(0.4ずつ)で設けることができる。そして、ブレーキ液圧補正値から推定した路面摩擦係数が大きくなるのに伴って、所定値を例えば0.3、0.7、1.1の順番で変更すれば、様々な路面の路面摩擦係数に精度良く近づけることができる。
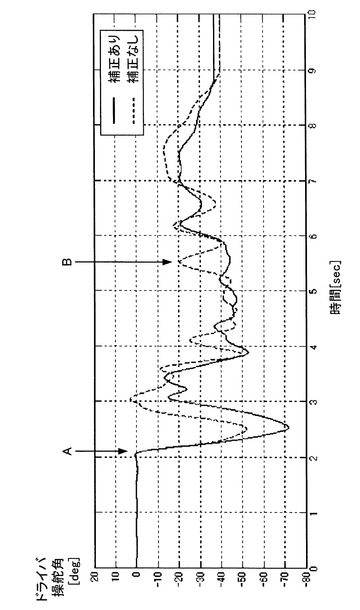
ここで、図13を参照して、ブレーキ液圧補正値に基づく操舵修正の効果を説明する。図13は、ABS制御部24aの作動状態に関わらず、常時最大ブレーキ液圧を保持する補正手法を用いたシミュレーションによるスプリットμ路(路面摩擦係数=1.1/0.1)における制動時のドライバ修正操舵の時系列変化を示すグラフである。
【0063】
図13に示したグラフの縦軸はドライバ操舵角を示し、横軸は時間を示す。また、図中の実線はブレーキ液圧補正値により路面摩擦係数を推定して転舵を行ったとき(補正あり)のドライバ操舵特性である。また、点線は実際のブレーキ液圧により路面摩擦係数を推定して転舵を行ったとき(補正なし)のドライバ操舵特性である。
2つの操舵特性を比較すると、ブレーキ液圧補正値により路面摩擦係数を推定して転舵を行ったとき(補正あり)のドライバ操舵特性の方が、補正なしのドライバ操舵特性よりも振幅(修正舵角の変動)が小さい。特に、ブレーキ液圧補正の効果が最も顕著に現れるのは、初期の修正操舵が開始時点(図中に示す矢印A)から約3.5秒経過後(図中に示す矢印B)であり、おおよそ10〜20[deg]の範囲で修正操舵の変動が低減していることがわかる。
【0064】
なお、本実施形態においては、前輪転舵コントローラ12、後輪転舵コントローラ13、前輪転舵アクチュエータ14および後輪転舵アクチュエータ15が転舵制御手段を構成し、液圧センサ23がブレーキ液圧検出手段を構成する。
また、ABS制御部24aがABS制御手段を構成し、ABS作動状態検出部24bがABS作動状態検出手段を構成し、目標転舵角演算部51が目標転舵角演算手段(ステップS501)を構成する。
ブレーキ液圧補正値演算部61がブレーキ液圧補正手段(ステップS601〜S603,S607〜S611)を構成し、路面摩擦係数推定部63が路面摩擦係数推定手段(ステップS604)を構成する。
【0065】
(作用効果)
(1)目標転舵角演算手段は、操舵角と車速とに基づいて操向輪の目標転舵角を演算する。ブレーキ液圧検出手段は、ブレーキ液圧を検出する。路面摩擦係数推定手段は、ブレーキ液圧に基づいて路面摩擦係数を推定する。ブレーキ液圧補正演算手段は、ブレーキ液圧の上昇中に、ブレーキ液圧が減少方向に変動したとき、そのときの路面摩擦係数の推定に用いるブレーキ液圧を増加補正する。前輪修正転舵角演算手段および後輪修正転舵角演算手段は、推定した路面摩擦係数に基づいて目標修正転舵角を演算する。転舵制御手段は、目標転舵角と目標修正転舵角とに基づいて算出した修正転舵角で操向輪の転舵機構を駆動制御する。
【0066】
これにより、ブレーキ液圧の上昇中に、ブレーキ液圧が減少方向に変動してもブレーキ液圧が減少せずに、ブレーキ液圧を増加補正することが可能となる。ブレーキ液圧の変動が生じた場合に、補正したブレーキ液圧から路面摩擦係数を推定するため、制動中の路面摩擦係数の推定精度が向上することが可能となる。また、操舵制御量が安定化し、スプリットμ路における運転者による修正操舵を容易にすることが可能となる。
【0067】
(2)ブレーキ液圧補正手段は、ブレーキ液圧の上昇中におけるブレーキ液圧の最大値を保持する。ブレーキ液圧補正手段は、ブレーキ液圧が保持した最大値未満になったときに、そのときの路面摩擦係数の推定に用いるブレーキ液圧を、保持したブレーキ液圧の最大値として補正する。
これにより、ブレーキペダルの操作等に応じてブレーキ液圧が上昇している途中において、ブレーキ液圧が減少方向に変化しても、ブレーキ液圧の最大値を保持する。このため、ブレーキ液圧の変動が生じた場合に推定する路面摩擦係数への影響を少なくして、運転操作等によるブレーキ液圧が変動する影響を低減することが可能となる。
【0068】
(3)ブレーキ液圧補正手段は、ブレーキ液圧と補正したブレーキ液圧のヒステリシスとの偏差が、ブレーキ液圧が増加しているときよりも減少しているときの方が大きくなるようにブレーキ液圧を補正する。
これにより、ブレーキ液圧補正値にヒステリシス特性を施すことで、液圧変動に対する安定性を確保することが可能となる。
(4)ブレーキ液圧補正手段は、ブレーキ液圧と補正したブレーキ液圧のヒステリシスとの幅は、ブレーキ液圧の変化速度が速くなるのに従って小さくなるようにブレーキ液圧を補正する。
前記同様に、ブレーキ液圧補正値にヒステリシス特性を施すことで、液圧変動に対する安定性を確保することが可能となる。
【0069】
(5)ブレーキ液圧補正手段は、車両が停車したときまたはブレーキペダルの踏み込み操作がなくなったとき、保持しているブレーキ液圧の最大値を初期値にリセットする。
これにより、車両が走行中またはブレーキ操作があるときには、運転者によるブレーキ操作によるブレーキ液圧の変動を低減して、制動中の路面摩擦係数の推定精度を向上することが可能となる。
(6)ブレーキ液圧補正手段は、ブレーキ液圧の最大値を保持してから所定時間が経過した後、保持しているブレーキ液圧の最大値を初期値にリセットする。
これにより、ブレーキ液圧の最大値を保持してから所定時間は、運転者によるブレーキ操作などによるブレーキ液圧の変動を低減して、制動中の路面摩擦係数の推定精度を向上することが可能となる。
【0070】
(7)ABS作動状態検出手段は、ABS制御手段の作動状態を検出する。ブレーキ液圧補正手段は、ABS制御手段が作動状態になったとき、保持しているブレーキ液圧の最大値を初期値にリセットすると共に、ABS制御手段が動作中はブレーキ液圧の補正を行わない。
これにより、ABS制御が作動していないとき間は、運転者によるブレーキ操作などによるブレーキ液圧の変動を低減して、制動中の路面摩擦係数の推定精度を向上することが可能となる。
【0071】
(8)ABS作動状態検出手段は、ABS制御手段の作動状態を検出する。路面摩擦係数推定手段は、ABS制御手段が非作動状態であるとき、第1の所定値を路面摩擦係数とする。
前記の路面摩擦係数の推定方法により、路面摩擦係数を所定値で一定にしておくため、ブレーキ液圧の上昇中における推定誤差を少なくする。よって、操舵制御量が安定化し、制御による車両の不安定挙動を抑えることが可能となる。
【0072】
(9)路面摩擦係数推定手段は、ブレーキ液圧に基づいて推定した路面摩擦係数が第2の所定値以下のとき、第2の所定値を路面摩擦係数とする。
前記の路面摩擦係数の推定方法により、推定した路面摩擦係数が所定値を超えるまでは、路面摩擦係数を所定値で一定にしておくため、ブレーキ液圧の上昇中における推定誤差をより少なくする。よって、車両挙動の安定化を図ることが可能となる。
【0073】
(10)路面摩擦係数推定手段が、ブレーキ液圧に基づいて推定した路面摩擦係数と路面状況に応じて設定した推定した路面摩擦係数よりも大きい第3の所定値との平均値を、路面摩擦係数とする。
前記の路面摩擦係数の推定方法により、常に、ブレーキ液圧補正値から推定した路面摩擦係数と、推定した路面摩擦係数よりも大きい所定値との平均値を、路面摩擦係数とする。このため、仮にブレーキ液圧補正値から推定した路面摩擦係数が所定値より離れた値であっても、路面摩擦係数に平均値を採用することによって、ブレーキ液圧の上昇中における推定誤差を少なくすることが可能となる。
【0074】
(11)路面摩擦係数推定手段が、平均値が第3の所定値を超えたとき、第3の所定値を増加する。
これにより、所定値をブレーキ液圧補正値に応じて複数設けることによって、本来の路面摩擦係数と推定した路面摩擦係数との推定精度誤差を更に少なくすることが可能となる。特に、路面摩擦係数を様々な路面の路面摩擦係数に精度良く近づけることが可能となる。
【0075】
(12)ブレーキ液圧の上昇中にブレーキ液圧が減少方向に変動したとき、そのときの路面摩擦係数の推定に用いるブレーキ液圧を増加補正する。
これにより、ブレーキ液圧を増加補正し、ブレーキ液圧の変動が生じた場合に、補正したブレーキ液圧から路面摩擦係数を推定することが可能となる。このため、制動中の路面摩擦係数の推定精度が向上することが可能となる。また、スプリットμ路における運転者による修正操舵を容易にすることが可能となる。
【0076】
(応用例)
(1)以上の実施形態で説明したコントローラの各演算部および推定部等の構成については、本発明が理解・実施できる程度に概略的に示したものにすぎない。
上述した実施形態に係る車両用転舵制御装置においては、前輪および後輪の転舵角を修正するものであったが、この構成に限らない。例えば、図14および図15に示す車両用転舵制御装置(変形例)のように、前輪のみの転舵角を修正するものであっても良い。このような構成の車両用転舵制御装置であっても、上述した車両用転舵制御装置と同様の効果を奏する。そして、運転者によるブレーキ操作量やABS制御などの作動によるブレーキ液圧の変動を抑えることができるため、制動中の路面摩擦係数の推定精度が向上させることができる。
【0077】
(2)以上の実施形態で説明した目標転舵角等の車両パラメータの算出方法については、本発明が理解・実施できる程度に概略的に示した例示にすぎない。
例えば、車両パラメータ等の算出にあっては、操舵角度と車速毎に設定したゲインマップを用いたり、操舵角速度に応じた微分項を追加したりしても良い。また、ブレーキ液圧補正値の算出方法やブレーキ液圧補正値に基づく路面摩擦係数の推定方法についても、他の条件を考慮するものであっても良い。ABS制御の作動状態や路面摩擦係数の推定時の複数の所定値等の組み合わせにより、路面状態や車両特性に応じた様々な制御が可能である。
以上より、本発明は、説明した実施形態に限定するものではなく、特許請求の範囲に示す技術的思想の範囲を逸脱しない限り様々な形態に変更することができる。
【符号の説明】
【0078】
10 車両用転舵制御装置
11 転舵制御コントローラ
12 前輪転舵コントローラ
13 後輪転舵コントローラ
14 前輪転舵アクチュエータ
15 後輪転舵アクチュエータ
51 目標転舵角演算部
52 目標修正転舵角演算部
61 ブレーキ液圧補正値演算部
62 制動力ヨーモーメント演算部
63 路面摩擦係数推定部
64 前輪修正転舵角演算部
65 後輪修正転舵角演算部
【技術分野】
【0001】
本発明は、車両用転舵制御装置および車両用転舵制御方法に関する。
【背景技術】
【0002】
車両の左右輪の路面摩擦係数(μ)がそれぞれ異なる路面、所謂スプリットμ路(μスプリット路とも言う)がある。このような路面における車両の制動時には、左右輪間の路面摩擦係数の差に起因する制動力差によって車両重心回りのヨーモーメントが発生する。この左右輪間の路面摩擦係数の差に起因する制動力差によって車両重心回りのヨーモーメントを打ち消す為に、運転者による操舵操作が必要となり、運転者にとって煩わしいという問題がある。
【0003】
上記問題を解決する手法の1つとして、特許文献1に記載の車両の操舵制御装置においては、次のように制御する。まず、左右一対の車輪の各々に対する路面摩擦係数を推定する。次に、その推定結果に基づき、同車輪間の制動力差を演算し、転舵対象車輪のスリップ角と総横力の関係を表す「スリップ角−総横力特性」を設定する。そして、このスリップ角−総横力特性と左右一対の車輪間の制動力差との関係に基づいて、車輪転舵角を設定する。このとき、前記の車両の操舵制御装置は、各輪のブレーキ液圧より各輪の制動力を演算し、左右間の制動力差を用いて車輪転舵角を設定する。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2005−247056号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
各車輪のABS(Antilock Brake System)制御装置の作動等によって、マスターシリンダ圧の振動や、運転者のブレーキ操作量の変化等によってブレーキ液圧が変動する場合がある。この場合に、前記の操舵制御装置では、各輪のブレーキ液圧を使用しているため、設定する車輪転舵角の出力が安定しないという問題があった。
そこで、本発明は、前記の課題に鑑み、ブレーキ液圧の変動によらず、車輪転舵角の安定性を良くすることのできる車両用転舵制御装置および車両用転舵制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明に係る車両用転舵制御装置は、前記の目的を達成するために、次のように構成する。
ブレーキ液圧補正演算部は、ブレーキ液圧が上昇している場合において、ブレーキ液圧が減少したときにブレーキ液圧を増加して補正したブレーキ液圧補正値を出力する。そして、路面摩擦係数推定部は、このブレーキ液圧補正値に基づいて路面摩擦係数を推定する。
【発明の効果】
【0007】
本発明に係る車両用転舵制御装置および車両用転舵制御方法によれば、例えば、ABS制御の作動によるマスターシリンダ圧の変動や、運転者のポンピングブレーキ操作等によるブレーキ液圧の変動が生じた場合でも、推定する路面摩擦係数への影響を少なくすることができる。よって、操舵制御量が安定化し、スプリットμ路における運転者による修正操舵を容易にすることができる。
【図面の簡単な説明】
【0008】
【図1】本発明の実施形態に係る車両用転舵制御装置の構成を示す模式図である。
【図2】車両用転舵制御装置の転舵制御コントローラの構成を示すブロック図である。
【図3】車両用転舵制御装置の目標修正転舵角演算部の構成を示すブロック図である。
【図4】車両用転舵制御装置における転舵制御コントローラで実行する処理の流れを示すフローチャートである。
【図5】目標修正転舵角演算部における目標修正転舵角演算処理の流れを示すフローチャートである。
【図6】路面摩擦係数の第1推定処理の流れを示すフローチャートである。
【図7】路面摩擦係数の第2推定処理の流れを示すフローチャートである。
【図8】路面摩擦係数の第3推定処理の流れを示すフローチャートである。
【図9】ブレーキ液圧とブレーキ液圧補正値とブレーキ液圧補正値とに含まれるヒステリシス特性の関係を示すグラフである。
【図10】路面摩擦係数推定部におけるブレーキ液圧補正値に基づく第1の路面摩擦係数の推定方法を示すグラフである。
【図11】路面摩擦係数推定部におけるブレーキ液圧補正値に基づく第2の路面摩擦係数の推定方法を示すグラフである。
【図12】路面摩擦係数推定部におけるブレーキ液圧補正値に基づく第3の路面摩擦係数の推定方法を示すグラフである。
【図13】常時最大ブレーキ液圧を保持する補正手法を用いたシミュレーションによるスプリットμ路(路面摩擦係数=1.1/0.1)における制動時のドライバ修正操舵の時系列変化を示すグラフである。
【図14】変形例に係る車両用転舵制御装置の構成を示す模式図である。
【図15】変形例に係る車両用転舵制御装置の転舵制御コントローラの構成を示すブロック図である。
【発明を実施するための形態】
【0009】
以下に、本発明の好適な実施形態(実施例)を添付図面に基づいて説明する。
(構成)
まず、図1を参照して、本発明の実施形態に係る車両用転舵制御装置10の構成を説明する。図1は、本発明の実施形態に係る車両用転舵制御装置10の構成を示す模式図である。
図1に示した車両は、転舵制御コントローラ11、前輪転舵コントローラ12、後輪転舵コントローラ13、前輪転舵アクチュエータ14、および後輪転舵アクチュエータ15を備える。さらに、車両は、液圧センサ23、およびABS作動状態検出部24bを備える。そして、車両用転舵制御装置10に、操舵角センサ21、車速センサ22、ABS制御部24aを接続する。
【0010】
図1に示したように、コラムシャフト31は、ステアリングホイール32と、前輪33L,33Rを転舵する前輪転舵機構41とを連結する。そして、そのコラムシャフト31に操舵角センサ21と前輪転舵アクチュエータ14とを設ける。
操舵角センサ21は、ステアリングホイール32の操舵角を検出する。操舵角センサ21は、例えばコラムシャフト31に設ける。操舵角センサ21は、例えばコラムシャフト31の回転角を検出するパルスエンコーダである。
【0011】
車速センサ22は、車体速(車速)を検出する。車速センサ22は、例えば各車輪に設け、各車輪速の平均値等から車速を検出する。
液圧センサ23は、マスターシリンダ36から発生したブレーキ37のブレーキ液圧を検出する。図示するように、液圧センサ23は、ブレーキ37とブレーキ37を作動するための力の伝達を行う液圧回路38との間の液圧を検出する。
なお、図示しないが、ブレーキ37は、前輪33L,33Rおよび後輪34L,34Rのそれぞれに備える。また、液圧センサ23は、各輪のブレーキ37に対応して複数備え、各輪のブレーキ液圧をそれぞれ検出する。
【0012】
ABS制御部24aは、制動時の車輪のロックに応じてABS(Antilock Brake System)制御を行う。具体的には制動時に車輪のロック(車輪速0)が発生した場合には、ロックが発生した車輪のブレーキ液圧を減圧し、このブレーキ液圧減圧によって車輪速加速度が0以上となった場合にブレーキ液圧を保持し、車輪速が所定値以上となった場合にはブレーキ液圧を増圧する、一般的に知られている(公知の)ABS制御を行う。なお、ABS制御としてはその他に、例えば車輪のスリップ率が所定値以上でブレーキ液圧を減圧し、このブレーキ液圧減圧によって車輪速加速度が0以上となった場合にブレーキ液圧を保持し、スリップ率が所定値未満となった場合にはブレーキ液圧を増圧する等、他の一般的に知られているABS制御であっても良い。
【0013】
ABS作動状態検出部24bは、ABS制御部24aの作動状態を検出し、ABS制御が作動中である場合に、ABS制御が作動中であることを示すABS作動フラグを転舵制御コントローラ11に対して出力するものである。
転舵制御コントローラ11は、操舵角センサ21が検出した操舵角と、車速センサ22が検出した車速とに応じて、操向輪である前輪33L,33Rおよび後輪34L,34Rの修正前輪転舵角と修正後輪転舵角とを演算して出力する。そして、転舵制御コントローラ11は、修正前輪転舵角を前輪転舵コントローラ12に出力し、修正後輪転舵角を後輪転舵コントローラ13に出力する。
【0014】
前輪転舵コントローラ12は、転舵制御コントローラ11が演算した修正前輪転舵角と、前輪転舵角センサ16が検出した実際の前輪転舵角との偏差を無くすような転舵角指令値を算出する。前輪転舵コントローラ12は、算出した転舵角指令値を前輪転舵アクチュエータ14に出力する。
後輪転舵コントローラ13は、転舵制御コントローラ11が演算した修正後輪転舵角と、後輪転舵角センサ17が検出した実際の後輪転舵角との偏差を無くすような転舵角指令値を算出する。後輪転舵コントローラ13は、算出した転舵角指令値を後輪転舵アクチュエータ15に出力する。
【0015】
前輪転舵アクチュエータ14は、前輪転舵コントローラ12からの転舵角指令値に応じて、コラムシャフト31を介して入力する回転を、減速または増速する可変ギヤ比制御を行う。すなわち、転舵制御コントローラ11が演算した修正前輪転舵角と、前輪転舵角センサ16が検出した実際の前輪転舵角との偏差を無くす様に、コラムシャフト31を介して入力する回転を減速または増速して前輪転舵機構41へ出力する。これにより、前輪33L,33Rの転舵角に対するステアリングホイール32の操舵角の比であるステアリングギア比を可変に制御する。
後輪転舵アクチュエータ15は、後輪転舵コントローラ13からの転舵角指令値により、後輪34L,34Rの転舵角を可変に制御する。
【0016】
次に、図2を参照して、車両用転舵制御装置10の転舵制御コントローラ11の構成を説明する。図2は、車両用転舵制御装置10の転舵制御コントローラ11の構成を示すブロック図である。
転舵制御コントローラ11は、目標転舵角演算部51および目標修正転舵角演算部52を備える。
目標転舵角演算部51は、操舵角センサ21からの操舵角θと車速センサ22からの車速Vとに基づいて、2輪モデルを用いて車両パラメータを演算し、目標前輪転舵角および目標後輪転舵角を演算する。
目標修正転舵角演算部52は、液圧センサ23からのブレーキ液圧とABS作動状態検出部24bからのABS作動フラグとに基づいて、2輪モデルを用いて車両パラメータを演算し、目標前輪修正転舵角および目標後輪修正転舵角を演算する。
なお、2輪モデルを用いた車両パラメータの算出方法については、図3に示す目標修正転舵角演算部の構成を説明した後に説明する。
【0017】
続いて、図3を参照して、車両用転舵制御装置10の目標修正転舵角演算部52の構成を説明する。図3は、車両用転舵制御装置10の目標修正転舵角演算部52の構成を示すブロック図である。
目標修正転舵角演算部52は、ブレーキ液圧補正値演算部61、制動力ヨーモーメント演算部62、路面摩擦係数推定部63、前輪修正転舵角演算部64、および後輪修正転舵角演算部65を備える。
【0018】
ブレーキ液圧補正値演算部61は、前輪33L,33Rおよび後輪34L,34Rのそれぞれに設けた液圧センサ23が検出した、前輪33L,33Rおよび後輪34L,34Rのそれぞれに対応するブレーキ液圧PFL,PFR,PRL,PRRを補正する。ブレーキ液圧補正値演算部61は、補正した各ブレーキ液圧PFL,PFR,PRL,PRRを、ブレーキ液圧補正値PFL’,PFR’,PRL’,PRR’として出力する。
【0019】
なお、ここでいうブレーキ液圧補正値PFL’,PFR’,PRL’,PRR’とは、制動のために用いる実ブレーキ液圧とは異なる。ブレーキ液圧補正値PFL’,PFR’,PRL’,PRR’は、後述する路面摩擦係数推定部63において各車輪に対応する路面摩擦係数μFL,μFR,μRL,μRRを推定するために用いる。
制動力ヨーモーメント演算部62は、液圧センサ23が検出したブレーキ液圧PFL,PFR,PRL,PRRに基づいて、前軸ヨーモーメントおよび後軸ヨーモーメントを演算して出力するものである。
【0020】
路面摩擦係数推定部63は、ブレーキ液圧補正値演算部61が演算したブレーキ液圧補正値PFL’,PFR’,PRL’,PRR’と、ABS作動状態検出部24bからのABS作動フラグとに基づいて、前輪33L,33Rおよび後輪34L,34Rのそれぞれに対応する路面摩擦係数μFL,μFR,μRL,μRRを推定して出力する。
前輪修正転舵角演算部64は、制動力ヨーモーメント演算部62が出力した前輪ヨーモーメントと、路面摩擦係数推定部63が出力した路面摩擦係数μFL,μFRと、ABS作動状態検出部24bのABS作動フラグとから、目標前輪修正転舵角を演算する。
【0021】
後輪修正転舵角演算部65は、制動力ヨーモーメント演算部62が出力した後輪ヨーモーメントと、路面摩擦係数推定部63が出力した路面摩擦係数μRL,μRRと、ABS作動状態検出部24bのABS作動フラグとから、目標後輪修正転舵角を演算する。
ここで、転舵制御コントローラ11における各演算部および推定部が演算する各車両パラメータの算出方法について説明する。
【0022】
(車両パラメータの算出)
一般に、2輪モデルを仮定すると、車両のヨー角加速度φ″と横加速度Vy´とは、下記(1)式および(2)式のようになる。
φ″=a11φ´+a12Vy+bf1θ+br1δ ………(1)
Vy´=a21φ´+a22Vy+bf2θ+br2δ ………(2)
【0023】
以上の式において、a11、a12、a21、a22、bf1、bf2は下記(3)式および(4)式のようになる。
a11=−2(Kf・Lf2+Kr・Lr2)/(Iz・Vx),
a12=−2(Kf・Lf−Kr・Lr)/(Iz・Vx),
a21={−M・Vx2−2(Kf・Lf−Kr・Lr)}/(M・Vx),
a22=−2(Kf+Kr)/(M・Vx) ………(3)
bf1=2Kf・Lf/(Iz・N),
bf2=2Kf/M・N,
br1=−2Kr・Lr/Iz,
br2=2Kr/M ………(4)
【0024】
ここで、各記号は、以下のパラメータを表している。
φ´:ヨーレート,
Vy:横速度,
Vx:前後速度,
θ:目標前輪転舵角(運転者操舵角),
δ:目標後輪転舵角,
Iz:車両慣性モーメント
M:車両重量
Lf:前軸〜重心点距離,
Lr:重心点〜後軸距離,
N:ギア比,
Kf:前輪コーナリングパワー,
Kr:後輪コーナリングパワー
【0025】
状態方程式より前輪操舵に対するヨーレート、横速度の伝達関数を求めると、下記(5)式および(6)式となる。
φ´(s)/θ(s)=Hf(s)/G(s)
={bf1・s+(a12・bf2−a22・bf1)}/G(s) ………(5)
Vy(s)/θ(s)={bf2・s+(a21・bf1−a11・bf2)}/G(s) ………(6)
【0026】
前記(5)式において、G(s)=s2−(a11+a22)s+(a11・a22−a12・a21)とすると、前記(5)式で示したヨーレート伝達関数は下記(7)式のようになる。
φ´(s)={ωφ´(V)2 ・(Tφ´(V)s+gφ´(V))}・θ(s)
/{s2+2ζφ´(V)・ωφ´(V)・s+ωφ´(V)2} ………(7)
ここで、
gφ´(V)=(a12・bf2−a22・bf1)/(a11・a22−a12・a21),
ωφ´(V)2=a11・a22−a12・a21,
2ζφ´(V)・ωφ´(V)=−a11−a22,
Tφ´(V)=bf1/(a11・a22−a12・a21)
である。
【0027】
また、同様に前記(6)式で示した横速度伝達関数は下記(8)式のようになる。
V(s)={ωVy(V)2 ・(TVy(V)s+gVy(V))}・θ(s)
/{s2+2ζVy(V)・ωVy(V)・s+ωVy(V)2} ………(8)
ここで、
gVy(V)=(a21・bf1−a11・bf2)/(a11・a22−a12・a21),
ωVy(V)2=a11・a22−a12・a21,
2ζVy(V)・ωVy(V)=−a11−a22,
TVy(V)=bf2/(a11・a22−a12・a21)
である。
以上から、車両パラメータgφ´(V)、ζφ´(V)、ωφ´(V)、Tφ´(V)、gVy(V)、ζVy(V)、ωVy(V)、TVy(V)を求める。
【0028】
次に、目標ヨーレートφ´tおよび目標横速度Vytの算出方法について、具体的に説明する。
(目標ヨーレートの算出)
先ず、目標ヨーレートの算出方法について説明する。なお、以下の説明において、「t」の添え字はパラメータが目標値であることを示すものである。
前記(7)式より、目標ヨー角加速度φ″t(s)は次式のようになる。
φ″t(s)=−2ζφ´t(V)・ωφ´t(V)・φ´t(s)
+ωφ´t(V)2・Tφ´(V)・θ(s)
+(1/s)ωφ´t(V)2・(gφ´t(V)・θ(s)−φ´t(s)) ………(9)
【0029】
ここで、目標ヨーレートのパラメータ、gφ´t(V)、ωφ´t(V)、ζφ´t(V)、Tφ´(V)は、下記(10)式のようになる。
gφ´t(V)=gφ´(V)×yrate_gain_map,
ωφ´t(V)=ωφ´(V)×yrate_omegn_map,
ζφ´t(V)=ζφ´(V)×yrate_zeta_map,
Tφ´t(V)=Tφ´(V)×yrate_zero_map ………(10)
但し、yrate_gain_map,yrate_omegn_map,yrate_zeta_map,yrate_zero_mapは、チューニングパラメータである。
以上の結果から、目標ヨーレートφ´t(s)は、次式のようになる。
φ´t(s)=(1/s)・φ″t(s) ………(11)
【0030】
(目標横速度の算出)
次に、目標横速度の算出方法について説明する。
前記(8)式より、目標横加速度Vy´t(s)は次式のようになる。
Vy´t(s)=−2ζVyt(V)・ωVyt(V)・Vyt(s)
+ωVyt(V)2・TVy(V)・θ(s)
+(1/s)ωVyt(V)2・(gVyt(V)・θ(s)−Vyt(s)) ………(12)
【0031】
ここで、目標横速度のパラメータ、gVyt(V)、ωVyt(V)、ζVyt(V)、TVy(V)は、下記(13)式のようになる。
gVyt(V)=gVy(V)×vy_gain_map,
ωVyt(V)=ωVy(V)×vy_omegn_map,
ζVyt(V)=ζVy(V)×vy_zeta_map,
TVyt(V)=TVy(V)×vy_zero_map ………(13)
但し、vy_gain_map,vy_omegn_map,vy_zeta_map,vy_zero_mapは、チューニングパラメータである。
以上の結果から、目標横速度Vyt(s)は、次式のようになる。
Vyt(s)=(1/s)・Vy´t(s) ………(14)
【0032】
次に目標ヨーレート目標ヨーレートφ´t(s)、目標横速度Vyt(s)から目標前輪転舵角θと目標後輪転舵角δを算出する。
φ″=a11φ´+a12Vy+bf1θ+br1δ ………(15)
Vy´=a21φ´+a22Vy+bf2θ+br2δ ………(16)
から、目標前輪転舵角θは、
θ=1/(bf1・br2−bf2・br1)[br2{φ″−(a11・φ´+a12・Vy)}−br1{Vy´−(a21・φ´+a22・Vy)}] ………(17)
となる。
同様に、目標後輪転舵角δは、
δ=1/(bf1・br2−bf2・br1)[−bf2{φ″−(a11・φ´+a12・Vy)}+bf1{Vy´t−(a21・φ´+a22・Vy)}] ………(18)
となる。
【0033】
(ヨーモーメントの算出)
なお、制動力によって車両に発生するヨーモーメントはブレーキ液圧等によって演算することができる。前輪車軸中心回りに発生するヨーモーメントMB_frontは、
MB_front=(FB_FL−FB_FR)・Tf/2
FB_FL=μB・PFL・S・(r/R)
FB_FR=μB・PFR・S・(r/R)
となる。同様に後輪車軸中心回りに発生するヨーモーメントMB_rearは、
MB_rear=(FB_RL−FB_RR)・Tr/2
FB_RL=μB・PRL・S・(r/R)
FB_RR=μB・PRR・S・(r/R)
となる。
【0034】
ここで、各記号は、以下のパラメータを表している。
FB_FL,FB_FR,FB_RL,FB_RR:各輪制動力,
PFL,PFR,PRL,PRR:各輪ブレーキ液圧,
Tf,Tr:前後トレッド,
μB:ブレーキパッド摩擦係数,
R:タイヤ半径,
r:ブレーキロータ有効半径,
S:ブレーキピストン面積
【0035】
(目標前輪修正転舵角の算出)
また、制動力ヨーモーメント演算部において算出した前輪車軸回りのヨーモーメントを打ち消す目標前輪修正転舵角θfは、
θf=−(1/bf1)・(1/IZ)・MB_front
となる。
ここでIZは、車両重心鉛直軸回りの慣性モーメントである。ただし、この目標前輪修正転舵角θfは左右の路面摩擦係数μ値が均等かつμ=1.1である場合を想定している。このため、左右の路面摩擦係数μが異なる場合は、路面摩擦係数μ値に反比例したゲインを目標前輪修正転舵角に乗じて補正する。前左右輪における修正操舵ゲインをそれぞれG(μFL)、G(μFR)とすれば、目標修正前輪転舵角は次式のようになる。
θf´=[G(μFL)+G(μFR)]・θf
【0036】
(目標後輪修正転舵角の算出)
また、後輪車軸回りのヨーモーメントを打ち消す目標後輪修正転舵角δrは、
δr=−(1/br1)・(1/IZ)・MB_rear
で表すことができる。同様に、後左右輪における修正操舵ゲインをそれぞれG(μRL)、G(μRR)とすれば、目標修正後輪転舵角は、次式のようになる。
δr´=[G(μRL)+G(μRR)]・δr
【0037】
(動作)
ここで、図4を参照して、車両用転舵制御装置10における転舵制御コントローラ11で実行する処理を説明する。図4は、車両用転舵制御装置10における転舵制御コントローラ11で実行する処理の流れを示すフローチャートである。
転舵制御コントローラ11の目標転舵角演算部51は、操舵角センサ21からの操舵角θと車速センサ22からの車速Vとに基づいて、車両パラメータを演算し、目標前輪転舵角および目標後輪転舵角を演算する(ステップS501)。
【0038】
次に、目標修正転舵角演算部52のブレーキ液圧補正演算部61は、後述する目標前輪修正転舵角および目標後輪修正転舵角を演算する目標修正転舵角演算処理を行う(ステップS502)。
転舵制御コントローラ11は、目標前輪転舵角と目標前輪修正転舵角とを加算した値と実際の前輪転舵角との偏差を修正前輪転舵角として前輪転舵コントローラ12に出力する(ステップS503)。加えて、転舵制御コントローラ11は、目標後輪転舵角と目標後輪修正転舵角とを加算した値と実際の後輪転舵角との偏差を修正後輪転舵角として転舵コントローラ13に出力する(ステップS504)。
【0039】
続いて、図5を参照して、ステップS502の目標修正転舵角演算部52における目標修正転舵角演算処理の流れを説明する。図5は、目標修正転舵角演算部52における目標修正転舵角演算処理の流れを示すフローチャートである。
まず、ブレーキ液圧補正値演算部61は、液圧センサ23から各ブレーキ液圧を取得する(ステップS601)。
ここで、ブレーキ液圧が増加している場合には(ステップS602の「YES」の分岐)、保持しているブレーキ液圧値をブレーキ液圧の最大値で更新する(ステップS603)。
【0040】
また、ブレーキ液圧が増加していない場合には(ステップS602の「NO」の分岐)、そのときの路面摩擦係数の推定処理に用いるブレーキ液圧を、保持している実ブレーキ液圧の最大値として補正する。つまり、この最大値を、ブレーキ液圧補正値として路面摩擦係数推定部63に出力する。
そして、路面摩擦係数推定部63は、ブレーキ液圧補正値演算部61が出力したブレーキ液圧補正値PFL’,PFR’,PRL’,PRR’に基づいて、路面摩擦係数の推定処理を行う(ステップS604)。制動力ヨーモーメント62は、液圧センサ23が検出したブレーキ液圧PFL,PFR,PRL,PRRに基づいて、前軸ヨーモーメントおよび前軸ヨーモーメントを演算する(ステップS605)。
【0041】
前輪転舵角演算部64は、制動力ヨーモーメント62が演算した前軸ヨーモーメントと、路面摩擦係数推定部63が推定した路面摩擦係数μFL,μFRと、ABS作動フラグとから目標前輪修正転舵角を算出する。また、前輪転舵角演算部65は、制動力ヨーモーメント62が演算した後軸ヨーモーメントと路面摩擦係数推定部63が推定した路面摩擦係数μRL,μRR、ABS作動フラグとから目標後輪修正転舵角を算出する(ステップS606)。
【0042】
ステップS607〜S610に示したブレーキ液圧補正値のリセット条件処理に合致するまで、ステップS601に戻り、処理を繰り返す。
また、車両が停止した場合(ステップS607の「YES」の分岐)、またはブレーキペダル35の踏み込み操作がなくなった場合には(ステップS608の「YES」の分岐)、保持しているブレーキ液圧値を初期値(ゼロ)にリセットして(ステップS611)、ステップS601に戻り、処理を繰り返す。
同様に、実ブレーキ液圧の最大値を保持し始めてから所定時間が経過した場合や(ステップS609の「YES」の分岐)、ABS制御が作動状態となった場合にも(ステップS610の「YES」の分岐)、保持しているブレーキ液圧値を初期値にリセットして、ステップS601に戻り、処理を繰り返す。
【0043】
続いて、図6〜図8を参照して、ステップS604の路面摩擦係数推定部63における路面摩擦係数の推定処理の流れを説明する。
まず、図6は、路面摩擦係数の第1推定処理の流れを示すフローチャートである。
路面摩擦係数推定部63は、ABS制御部24aが作動していない場合には(ステップS701の「NO」の分岐)、前輪転舵角演算部64および後輪転舵角演算部65に出力する路面摩擦係数を路面状況に応じて設定した所定値で一定にする(ステップS702)。また、ステップS701に処理が戻り、路面摩擦係数推定部63は、ABS制御部24aが非作動状態から作動状態になった場合には(ステップS701の「YES」の分岐)、前輪転舵角演算部64および後輪転舵角演算部65に出力する路面摩擦係数を所定値で一定にするのをやめる。そして、路面摩擦係数推定部63は、ブレーキ液圧補正値から推定した路面摩擦係数を前輪転舵角演算部64および後輪転舵角演算部65に出力する(ステップS703)。
【0044】
その後、ステップS701に処理が戻り、ABS制御部24aの作動状態を判定し続ける。そして、ABS制御部24aが再び作動状態から非作動状態になった場合には(ステップS701の「NO」の分岐)、前輪転舵角演算部64および後輪転舵角演算部65に出力する路面摩擦係数を所定値で一定にする(ステップS702)。
【0045】
また、図7は、路面摩擦係数の第2推定処理の流れを示すフローチャートである。
まず、路面摩擦係数推定部63は、ブレーキ液圧補正値に基づいて路面摩擦係数を推定する(ステップS801)。このとき、路面摩擦係数推定部63は、推定した路面摩擦係数が所定値を超えていない場合には(ステップS802の「NO」の分岐)、前輪転舵角演算部64および後輪転舵角演算部65に出力する路面摩擦係数を所定値で一定にする(ステップS803)。そして、ステップS801に戻り、処理を繰り返す。
また、ステップS802で、推定した路面摩擦係数が所定値を超えている場合には(ステップS802の「YES」の分岐)、所定値に代えてブレーキ液圧によって推定した路面摩擦係数を前輪転舵角演算部64および後輪転舵角演算部65に出力して(ステップS804)、ステップS801に戻り、処理を繰り返す。
【0046】
続いて、図8は、路面摩擦係数の第3推定処理の流れを示すフローチャートである。
まず、路面摩擦係数推定部63は、ブレーキ液圧補正値に基づいて路面摩擦係数を推定する(ステップS901)。このとき、路面摩擦係数推定部63は、推定した路面摩擦係数と、設定した数値の大きさが段階的に異なる複数の所定値との平均値を算出する。路面摩擦係数推定部63は、この平均値を路面摩擦係数として前輪転舵角演算部64および後輪転舵角演算部65に出力する(ステップS902)。なお、この所定値は、数値の最も小さいものから順に用いると共に、推定した路面摩擦係数の値に最も近く且つその路面摩擦係数よりも大きい値とする。ここで、推定した路面摩擦係数が現段階の所定値を超えていなければ(ステップS903の「NO」の分岐)、その所定値を平均値の算出に用いる所定値として保持し、ステップS901に戻り、処理を繰り返す。
【0047】
また、ステップS903で、推定した路面摩擦係数が所定値を超えていれば(ステップS903の「YES」の分岐)、現段階の所定値をそれよりも上の段階のものに更新して(ステップS904)、ステップS901に戻り、処理を繰り返す。例えば、1段階上のものに更新しても推定した路面摩擦係数より大きな数値とならない場合は、大きな数値となるようにそれよりも上の段階のものに更新する。
【0048】
続いて、図9を参照して、ブレーキ液圧補正値演算部61におけるブレーキ液圧の補正演算方法を説明する。図9は、ブレーキ液圧とブレーキ液圧補正値とブレーキ液圧補正値とに含まれるヒステリシス特性の関係を示すグラフである。
図9に示したグラフの縦軸はブレーキ液圧補正値を示し、横軸は時間を示す。また、図中の点線は車両の制動に用いる実ブレーキ液圧を示し、実線は保持しているブレーキ液圧補正値を示し、破線はヒステリシス特性を含むブレーキ液圧補正値をそれぞれ示す。
【0049】
まず、ABS制御部24aが非作動の状態における補正演算方法について説明する。ブレーキ液圧補正演算部61は、図4に示したように実ブレーキ液圧の上昇中に、実ブレーキ液圧が減少方向に変動したときに、そのときの路面摩擦係数の推定に用いるブレーキ液圧として実ブレーキ液圧を増加補正する。これが、図中に実線で示したようなブレーキ液圧補正値となる。
【0050】
具体的に、ブレーキ液圧補正演算部61は、ブレーキ液圧の上昇中において、減少方向への変動が無い期間または保持した最大値を超える期間は、実ブレーキ液圧をそのままブレーキ液圧補正値として出力する。また、ブレーキ液圧補正演算部61は、減少方向への変化が生じている期間においては、保持した最大値をブレーキ液圧補正値として出力する。
【0051】
従って、ブレーキ液圧補正演算部61は、保持しているブレーキ液圧の最大値よりも実ブレーキ液圧が減少している場合は、保持しているブレーキ液圧値を更新せず、それまでの最大値を保持し続ける。なお、ブレーキ液圧補正演算部61は、車両が停車または運転者のブレーキペダル35の踏み込み操作がなくなった場合に、保持しているブレーキ液圧の最大値を初期値(ゼロ)にリセットする。
【0052】
次に、ABS制御部24aが作動状態における補正演算方法について説明する。ABS制御部24aが非作動状態から作動状態になった場合、補正の方法として3つの方法がある。
1つ目は、ブレーキ液圧の最大値を保持し、ABSの作動状態に関わらず常にブレーキ液圧の最大値をブレーキ液圧補正値とする方法である。2つ目は、ABSの作動前は、常にブレーキ液圧の最大値をブレーキ液圧補正値とし、ABS作動後は保持したブレーキ液圧の最大値を初期値にリセットすると共に一切の補正を行わない方法である。3つ目は、ABS作動後のブレーキ液圧に対してヒステリシス特性を持たせることで、ABS作動に起因するブレーキ液圧の振動を補正する方法である。
【0053】
特に3つ目の手法でいうヒステリシス特性とは、運転者の修正操舵の負担量等を考慮して意図的に施したブレーキ液圧補正値の変化特性のことである。ブレーキ液圧補正値演算部61は、例えば実ブレーキ液圧が増加しているときよりも減少しているときの方が、図中に示したように実ブレーキ液圧のブレーキヒステリシスとブレーキ液圧補正値のブレーキヒステリシスとの幅A(偏差)が大きくなるようにブレーキ液圧補正値を演算する。
【0054】
また、ブレーキ液圧補正値演算部61は、例えば実ブレーキ液圧の変化速度が速くなるのに従って、図中に示したように実ブレーキ液圧のブレーキヒステリシスとブレーキ液圧補正値のブレーキヒステリシスとの幅B(偏差)が小さくなるようにブレーキ液圧補正値を演算する。
このように、ブレーキ液圧に対して昇圧速度依存のヒステリシス特性を持たせる補正、つまり昇圧速度が大きい場合にはヒステリシス幅を小さくする。一方、昇圧速度が小さい場合には、ヒステリシス幅を大きくする。このような補正を施すことで、液圧変動に対する安定性を確保することができる。なお、上述した3つの補正手法については、運転者の修正操舵の負担量や、車両姿勢の安定性等の諸条件を考慮して選択すれば良い。
【0055】
ここで、図10〜図12を参照して、路面摩擦係数推定部63におけるブレーキ液圧補正値に基づく路面摩擦係数の推定方法を説明する。図10〜図12は、路面摩擦係数推定部63におけるブレーキ液圧補正値に基づく第1〜第3の路面摩擦係数の推定方法を示すグラフである。
図10に示した路面摩擦係数の第1推定方法において、路面摩擦係数推定部63は、ABS制御が非作動状態であるとき、車輪における路面摩擦係数を路面状況に応じて設定した所定値(例えば1.1)で一定にする。なお、路面摩擦係数推定部63は、ABS制御が非作動状態から作動状態になったとき、ABS制御が作動状態であるときのブレーキ液圧から路面摩擦係数を推定する。これにより、転舵制御量が安定化し、制御による車両の不安定挙動を抑えることができる。
【0056】
つまり、図10に示したように、ブレーキ操作開始時は、ブレーキ液圧の変動が急である。このため、そのブレーキ液圧をそのまま用いると路面摩擦係数の推定誤差が大きくなる。そこで、第1の推定方法では、路面摩擦係数を所定値で一定にしておくことにより、ブレーキ液圧の上昇中における推定誤差を少なくする。そして、より適正な操舵制御量を出力しつつ、車両挙動の安定化を図ることができる。
【0057】
一方、図11に示した路面摩擦係数の第2推定方法において、路面摩擦係数推定部63は、ブレーキ液圧の上昇前において、車輪における路面摩擦係数の初期値として路面状況に応じて設定した所定値(例えば0.6)を前輪転舵角演算部64および後輪転舵角演算部65に出力する。そして、路面摩擦係数推定部63は、ブレーキ液圧補正値によって推定した路面摩擦係数が前記設定した所定値以下であるときは、路面摩擦係数をその所定値で一定にする。また、路面摩擦係数推定部63は、推定した路面摩擦係数が所定値を越えるときは、その所定値に代えて推定した路面摩擦係数を出力する。
【0058】
上述したように、ブレーキ操作開始時は、ブレーキ液圧の変動が特に急である。このため、ブレーキ液圧の変動も著しく急となり、路面摩擦係数の推定誤差が大きくなる。そこで、第2の推定方法では、ブレーキ液圧の立ち上がりにおいて、推定した路面摩擦係数が所定値を超えるまでは、路面摩擦係数を所定値で一定にしておく。これにより、ブレーキ液圧の上昇中における推定誤差をより少なくすることができる。
なお、前記の所定値は、路面状態等に合わせて任意の値を設定して良い。例えば、ウェット路面相当に合わせて0.8としても良い。これにより、ABS非作動時における推定誤差を少なくして、より適正な操舵制御量を出力しつつ車両挙動の安定化を図ることができる。
【0059】
また、図12に示した路面摩擦係数の第3推定方法において、路面摩擦係数推定部63は、各車輪における路面摩擦係数を、ブレーキ液圧補正値から推定した路面摩擦係数と路面状況に応じて設定した所定値(例えば0.3)との平均値とする。なお、この平均値の算出に用いる所定値は、同じく平均値の算出に用いる推定した路面摩擦係数よりも大きい所定値とする。
【0060】
つまり、第3推定方法においては、常に、ブレーキ液圧補正値から推定した路面摩擦係数と、推定した路面摩擦係数よりも大きい所定値との平均値を、路面摩擦係数とする。このため、仮にブレーキ液圧補正値から推定した路面摩擦係数が実際の路面摩擦係数より離れた値であったとしても、路面摩擦係数の推定に平均値を採用することによって、ブレーキ液圧の上昇中における推定誤差を少なくする。
【0061】
また、所定値はブレーキ液圧補正値に応じて1つのみならず複数設けても良い。例えば、ウエット路面以外にも、凍結路面や舗装道路、未舗装道路、山道等のドライブモードに合わせて、路面摩擦係数を設定することができる。所定値をブレーキ液圧補正値に応じて複数設けることによって、本来の路面摩擦係数と推定した路面摩擦係数との推定精度誤差を更に少なくすることができる。
【0062】
例えば、図示するように、所定値を例えば0.3、0.7、1.1の均等間隔(0.4ずつ)で設けることができる。そして、ブレーキ液圧補正値から推定した路面摩擦係数が大きくなるのに伴って、所定値を例えば0.3、0.7、1.1の順番で変更すれば、様々な路面の路面摩擦係数に精度良く近づけることができる。
ここで、図13を参照して、ブレーキ液圧補正値に基づく操舵修正の効果を説明する。図13は、ABS制御部24aの作動状態に関わらず、常時最大ブレーキ液圧を保持する補正手法を用いたシミュレーションによるスプリットμ路(路面摩擦係数=1.1/0.1)における制動時のドライバ修正操舵の時系列変化を示すグラフである。
【0063】
図13に示したグラフの縦軸はドライバ操舵角を示し、横軸は時間を示す。また、図中の実線はブレーキ液圧補正値により路面摩擦係数を推定して転舵を行ったとき(補正あり)のドライバ操舵特性である。また、点線は実際のブレーキ液圧により路面摩擦係数を推定して転舵を行ったとき(補正なし)のドライバ操舵特性である。
2つの操舵特性を比較すると、ブレーキ液圧補正値により路面摩擦係数を推定して転舵を行ったとき(補正あり)のドライバ操舵特性の方が、補正なしのドライバ操舵特性よりも振幅(修正舵角の変動)が小さい。特に、ブレーキ液圧補正の効果が最も顕著に現れるのは、初期の修正操舵が開始時点(図中に示す矢印A)から約3.5秒経過後(図中に示す矢印B)であり、おおよそ10〜20[deg]の範囲で修正操舵の変動が低減していることがわかる。
【0064】
なお、本実施形態においては、前輪転舵コントローラ12、後輪転舵コントローラ13、前輪転舵アクチュエータ14および後輪転舵アクチュエータ15が転舵制御手段を構成し、液圧センサ23がブレーキ液圧検出手段を構成する。
また、ABS制御部24aがABS制御手段を構成し、ABS作動状態検出部24bがABS作動状態検出手段を構成し、目標転舵角演算部51が目標転舵角演算手段(ステップS501)を構成する。
ブレーキ液圧補正値演算部61がブレーキ液圧補正手段(ステップS601〜S603,S607〜S611)を構成し、路面摩擦係数推定部63が路面摩擦係数推定手段(ステップS604)を構成する。
【0065】
(作用効果)
(1)目標転舵角演算手段は、操舵角と車速とに基づいて操向輪の目標転舵角を演算する。ブレーキ液圧検出手段は、ブレーキ液圧を検出する。路面摩擦係数推定手段は、ブレーキ液圧に基づいて路面摩擦係数を推定する。ブレーキ液圧補正演算手段は、ブレーキ液圧の上昇中に、ブレーキ液圧が減少方向に変動したとき、そのときの路面摩擦係数の推定に用いるブレーキ液圧を増加補正する。前輪修正転舵角演算手段および後輪修正転舵角演算手段は、推定した路面摩擦係数に基づいて目標修正転舵角を演算する。転舵制御手段は、目標転舵角と目標修正転舵角とに基づいて算出した修正転舵角で操向輪の転舵機構を駆動制御する。
【0066】
これにより、ブレーキ液圧の上昇中に、ブレーキ液圧が減少方向に変動してもブレーキ液圧が減少せずに、ブレーキ液圧を増加補正することが可能となる。ブレーキ液圧の変動が生じた場合に、補正したブレーキ液圧から路面摩擦係数を推定するため、制動中の路面摩擦係数の推定精度が向上することが可能となる。また、操舵制御量が安定化し、スプリットμ路における運転者による修正操舵を容易にすることが可能となる。
【0067】
(2)ブレーキ液圧補正手段は、ブレーキ液圧の上昇中におけるブレーキ液圧の最大値を保持する。ブレーキ液圧補正手段は、ブレーキ液圧が保持した最大値未満になったときに、そのときの路面摩擦係数の推定に用いるブレーキ液圧を、保持したブレーキ液圧の最大値として補正する。
これにより、ブレーキペダルの操作等に応じてブレーキ液圧が上昇している途中において、ブレーキ液圧が減少方向に変化しても、ブレーキ液圧の最大値を保持する。このため、ブレーキ液圧の変動が生じた場合に推定する路面摩擦係数への影響を少なくして、運転操作等によるブレーキ液圧が変動する影響を低減することが可能となる。
【0068】
(3)ブレーキ液圧補正手段は、ブレーキ液圧と補正したブレーキ液圧のヒステリシスとの偏差が、ブレーキ液圧が増加しているときよりも減少しているときの方が大きくなるようにブレーキ液圧を補正する。
これにより、ブレーキ液圧補正値にヒステリシス特性を施すことで、液圧変動に対する安定性を確保することが可能となる。
(4)ブレーキ液圧補正手段は、ブレーキ液圧と補正したブレーキ液圧のヒステリシスとの幅は、ブレーキ液圧の変化速度が速くなるのに従って小さくなるようにブレーキ液圧を補正する。
前記同様に、ブレーキ液圧補正値にヒステリシス特性を施すことで、液圧変動に対する安定性を確保することが可能となる。
【0069】
(5)ブレーキ液圧補正手段は、車両が停車したときまたはブレーキペダルの踏み込み操作がなくなったとき、保持しているブレーキ液圧の最大値を初期値にリセットする。
これにより、車両が走行中またはブレーキ操作があるときには、運転者によるブレーキ操作によるブレーキ液圧の変動を低減して、制動中の路面摩擦係数の推定精度を向上することが可能となる。
(6)ブレーキ液圧補正手段は、ブレーキ液圧の最大値を保持してから所定時間が経過した後、保持しているブレーキ液圧の最大値を初期値にリセットする。
これにより、ブレーキ液圧の最大値を保持してから所定時間は、運転者によるブレーキ操作などによるブレーキ液圧の変動を低減して、制動中の路面摩擦係数の推定精度を向上することが可能となる。
【0070】
(7)ABS作動状態検出手段は、ABS制御手段の作動状態を検出する。ブレーキ液圧補正手段は、ABS制御手段が作動状態になったとき、保持しているブレーキ液圧の最大値を初期値にリセットすると共に、ABS制御手段が動作中はブレーキ液圧の補正を行わない。
これにより、ABS制御が作動していないとき間は、運転者によるブレーキ操作などによるブレーキ液圧の変動を低減して、制動中の路面摩擦係数の推定精度を向上することが可能となる。
【0071】
(8)ABS作動状態検出手段は、ABS制御手段の作動状態を検出する。路面摩擦係数推定手段は、ABS制御手段が非作動状態であるとき、第1の所定値を路面摩擦係数とする。
前記の路面摩擦係数の推定方法により、路面摩擦係数を所定値で一定にしておくため、ブレーキ液圧の上昇中における推定誤差を少なくする。よって、操舵制御量が安定化し、制御による車両の不安定挙動を抑えることが可能となる。
【0072】
(9)路面摩擦係数推定手段は、ブレーキ液圧に基づいて推定した路面摩擦係数が第2の所定値以下のとき、第2の所定値を路面摩擦係数とする。
前記の路面摩擦係数の推定方法により、推定した路面摩擦係数が所定値を超えるまでは、路面摩擦係数を所定値で一定にしておくため、ブレーキ液圧の上昇中における推定誤差をより少なくする。よって、車両挙動の安定化を図ることが可能となる。
【0073】
(10)路面摩擦係数推定手段が、ブレーキ液圧に基づいて推定した路面摩擦係数と路面状況に応じて設定した推定した路面摩擦係数よりも大きい第3の所定値との平均値を、路面摩擦係数とする。
前記の路面摩擦係数の推定方法により、常に、ブレーキ液圧補正値から推定した路面摩擦係数と、推定した路面摩擦係数よりも大きい所定値との平均値を、路面摩擦係数とする。このため、仮にブレーキ液圧補正値から推定した路面摩擦係数が所定値より離れた値であっても、路面摩擦係数に平均値を採用することによって、ブレーキ液圧の上昇中における推定誤差を少なくすることが可能となる。
【0074】
(11)路面摩擦係数推定手段が、平均値が第3の所定値を超えたとき、第3の所定値を増加する。
これにより、所定値をブレーキ液圧補正値に応じて複数設けることによって、本来の路面摩擦係数と推定した路面摩擦係数との推定精度誤差を更に少なくすることが可能となる。特に、路面摩擦係数を様々な路面の路面摩擦係数に精度良く近づけることが可能となる。
【0075】
(12)ブレーキ液圧の上昇中にブレーキ液圧が減少方向に変動したとき、そのときの路面摩擦係数の推定に用いるブレーキ液圧を増加補正する。
これにより、ブレーキ液圧を増加補正し、ブレーキ液圧の変動が生じた場合に、補正したブレーキ液圧から路面摩擦係数を推定することが可能となる。このため、制動中の路面摩擦係数の推定精度が向上することが可能となる。また、スプリットμ路における運転者による修正操舵を容易にすることが可能となる。
【0076】
(応用例)
(1)以上の実施形態で説明したコントローラの各演算部および推定部等の構成については、本発明が理解・実施できる程度に概略的に示したものにすぎない。
上述した実施形態に係る車両用転舵制御装置においては、前輪および後輪の転舵角を修正するものであったが、この構成に限らない。例えば、図14および図15に示す車両用転舵制御装置(変形例)のように、前輪のみの転舵角を修正するものであっても良い。このような構成の車両用転舵制御装置であっても、上述した車両用転舵制御装置と同様の効果を奏する。そして、運転者によるブレーキ操作量やABS制御などの作動によるブレーキ液圧の変動を抑えることができるため、制動中の路面摩擦係数の推定精度が向上させることができる。
【0077】
(2)以上の実施形態で説明した目標転舵角等の車両パラメータの算出方法については、本発明が理解・実施できる程度に概略的に示した例示にすぎない。
例えば、車両パラメータ等の算出にあっては、操舵角度と車速毎に設定したゲインマップを用いたり、操舵角速度に応じた微分項を追加したりしても良い。また、ブレーキ液圧補正値の算出方法やブレーキ液圧補正値に基づく路面摩擦係数の推定方法についても、他の条件を考慮するものであっても良い。ABS制御の作動状態や路面摩擦係数の推定時の複数の所定値等の組み合わせにより、路面状態や車両特性に応じた様々な制御が可能である。
以上より、本発明は、説明した実施形態に限定するものではなく、特許請求の範囲に示す技術的思想の範囲を逸脱しない限り様々な形態に変更することができる。
【符号の説明】
【0078】
10 車両用転舵制御装置
11 転舵制御コントローラ
12 前輪転舵コントローラ
13 後輪転舵コントローラ
14 前輪転舵アクチュエータ
15 後輪転舵アクチュエータ
51 目標転舵角演算部
52 目標修正転舵角演算部
61 ブレーキ液圧補正値演算部
62 制動力ヨーモーメント演算部
63 路面摩擦係数推定部
64 前輪修正転舵角演算部
65 後輪修正転舵角演算部
【特許請求の範囲】
【請求項1】
運転者が操舵する車両のステアリングホイールの操舵角と車速とに基づいて操向輪の目標転舵角を演算する目標転舵角演算手段と、
ブレーキペダルの踏み込み操作に応じてマスターシリンダから発生するブレーキ液圧を検出するブレーキ液圧検出手段と、
前記ブレーキ液圧検出手段が検出した前記ブレーキ液圧に基づいて路面摩擦係数を推定する路面摩擦係数推定手段と、
前記ブレーキ液圧検出手段が検出した前記ブレーキ液圧の変動に基づいて、前記路面摩擦係数の推定に用いるブレーキ液圧を補正するブレーキ液圧補正手段と、
前記路面摩擦係数推定手段が推定した前記路面摩擦係数に基づいて目標修正転舵角を演算する目標修正転舵角演算手段と、
前記目標転舵角演算手段が演算した前記目標転舵角と、前記目標修正転舵角演算手段が演算した前記目標修正転舵角とに基づいて算出した修正転舵角で前記操向輪の転舵機構を駆動制御する転舵制御手段と、
を備え、
前記ブレーキ液圧補正手段は、前記ブレーキ液圧の上昇中に、前記ブレーキ液圧が減少方向に変動したとき、そのときの前記路面摩擦係数の推定に用いるブレーキ液圧を増加補正することを特徴とする車両用転舵制御装置。
【請求項2】
前記ブレーキ液圧補正手段は、前記ブレーキ液圧の上昇中における前記ブレーキ液圧の最大値を保持し、前記ブレーキ液圧が前記保持した最大値未満になったときに、そのときの前記路面摩擦係数の推定に用いるブレーキ液圧を、前記保持した前記ブレーキ液圧の最大値として補正することを特徴とする請求項1記載の車両用転舵制御装置。
【請求項3】
前記ブレーキ液圧補正手段は、前記ブレーキ液圧と補正したブレーキ液圧のヒステリシスとの偏差が、前記ブレーキ液圧が増加しているときよりも減少しているときの方が大きくなるように前記ブレーキ液圧を補正することを特徴とする請求項1記載の車両用転舵制御装置。
【請求項4】
前記ブレーキ液圧補正手段は、前記ブレーキ液圧と補正したブレーキ液圧のヒステリシスとの偏差が、前記ブレーキ液圧の変化速度が速くなるのに従って小さくなるように前記ブレーキ液圧を補正することを特徴とする請求項1または3記載の車両用転舵制御装置。
【請求項5】
前記ブレーキ液圧補正手段は、前記車両が停車したときまたは前記ブレーキペダルの前記踏み込み操作がなくなったとき、保持している前記ブレーキ液圧の最大値を初期値にリセットすることを特徴とする請求項2記載の車両用転舵制御装置。
【請求項6】
前記ブレーキ液圧補正手段は、前記ブレーキ液圧の最大値を保持してから所定時間が経過した後、保持している前記ブレーキ液圧の最大値を初期値にリセットすることを特徴とする請求項2または5記載の車両用転舵制御装置。
【請求項7】
制動時の車輪のロックに応じてABS(Antilock Brake System)制御を行うABS制御手段の作動状態を検出するABS作動状態検出手段を備え、
前記ブレーキ液圧補正手段は、前記ABS制御手段が作動状態になったとき、保持している前記ブレーキ液圧の最大値を初期値にリセットすると共に、前記ABS制御手段が動作中は前記ブレーキ液圧の補正を行わないことを特徴とする請求項2,5,6のいずれか1項に記載の車両用転舵制御装置。
【請求項8】
制動時の車輪のロックに応じてABS(Antilock Brake System)制御を行うABS制御手段の作動状態を検出するABS作動状態検出手段を備え、
前記路面摩擦係数推定手段は、前記ABS制御手段が非作動状態であるとき、所定の路面状況に対応する路面摩擦係数である第1の所定値を前記推定した路面摩擦係数とすることを特徴とする請求項1〜6のいずれか1項に記載の車両用転舵制御装置。
【請求項9】
前記路面摩擦係数推定手段は、前記ブレーキ液圧に基づいて推定した路面摩擦係数が所定の路面状況に対応する路面摩擦係数である第2の所定値以下のときは、前記第2の所定値を前記推定した路面摩擦係数とすることを特徴とする請求項1〜7のいずれか1項に記載の車両用転舵制御装置。
【請求項10】
前記路面摩擦係数推定手段は、前記ブレーキ液圧に基づいて推定した路面摩擦係数と前記推定した路面摩擦係数よりも大きい第3の所定値との平均値を前記推定した前記路面摩擦係数とすることを特徴とする請求項1〜7のいずれか1項に記載の車両用転舵制御装置。
【請求項11】
前記路面摩擦係数推定手段は、前記第3の所定値を、段階的な大きさの数値で複数設定し、
前記平均値の算出において、前記複数の第3の所定値のうち一番小さい数値のものから順に用い、前記推定した路面摩擦係数が現段階の前記第3の所定値を超える毎に、前記平均値の算出に用いる第3の所定値を次の段階のものに切り替えることを特徴とする請求項10記載の車両用転舵制御装置。
【請求項12】
運転者が操舵する車両のステアリングホイールの操舵角と車速とに基づいて操向輪の目標転舵角を演算する目標転舵角演算ステップ、
ブレーキペダルの踏み込み操作に応じてマスターシリンダから発生するブレーキ液圧を検出するブレーキ液圧検出ステップ、
前記ブレーキ液圧に基づいて路面摩擦係数を推定する路面摩擦係数推定ステップ、
前記ブレーキ液圧の変動に基づいて、前記路面摩擦係数の推定に用いるブレーキ液圧を補正するブレーキ液圧補正ステップ、
前記路面摩擦係数に基づいて目標修正転舵角を演算する目標修正転舵角演算ステップ、
前記前記目標転舵角と前記目標修正転舵角とに基づいて算出した修正転舵角で前記操向輪の転舵機構を駆動制御する転舵制御ステップ、
を有し、前記ブレーキ液圧の上昇中に、前記ブレーキ液圧が減少方向に変動したとき、そのときの前記路面摩擦係数の推定に用いるブレーキ液圧を増加補正することを特徴とする車両用転舵制御方法。
【請求項1】
運転者が操舵する車両のステアリングホイールの操舵角と車速とに基づいて操向輪の目標転舵角を演算する目標転舵角演算手段と、
ブレーキペダルの踏み込み操作に応じてマスターシリンダから発生するブレーキ液圧を検出するブレーキ液圧検出手段と、
前記ブレーキ液圧検出手段が検出した前記ブレーキ液圧に基づいて路面摩擦係数を推定する路面摩擦係数推定手段と、
前記ブレーキ液圧検出手段が検出した前記ブレーキ液圧の変動に基づいて、前記路面摩擦係数の推定に用いるブレーキ液圧を補正するブレーキ液圧補正手段と、
前記路面摩擦係数推定手段が推定した前記路面摩擦係数に基づいて目標修正転舵角を演算する目標修正転舵角演算手段と、
前記目標転舵角演算手段が演算した前記目標転舵角と、前記目標修正転舵角演算手段が演算した前記目標修正転舵角とに基づいて算出した修正転舵角で前記操向輪の転舵機構を駆動制御する転舵制御手段と、
を備え、
前記ブレーキ液圧補正手段は、前記ブレーキ液圧の上昇中に、前記ブレーキ液圧が減少方向に変動したとき、そのときの前記路面摩擦係数の推定に用いるブレーキ液圧を増加補正することを特徴とする車両用転舵制御装置。
【請求項2】
前記ブレーキ液圧補正手段は、前記ブレーキ液圧の上昇中における前記ブレーキ液圧の最大値を保持し、前記ブレーキ液圧が前記保持した最大値未満になったときに、そのときの前記路面摩擦係数の推定に用いるブレーキ液圧を、前記保持した前記ブレーキ液圧の最大値として補正することを特徴とする請求項1記載の車両用転舵制御装置。
【請求項3】
前記ブレーキ液圧補正手段は、前記ブレーキ液圧と補正したブレーキ液圧のヒステリシスとの偏差が、前記ブレーキ液圧が増加しているときよりも減少しているときの方が大きくなるように前記ブレーキ液圧を補正することを特徴とする請求項1記載の車両用転舵制御装置。
【請求項4】
前記ブレーキ液圧補正手段は、前記ブレーキ液圧と補正したブレーキ液圧のヒステリシスとの偏差が、前記ブレーキ液圧の変化速度が速くなるのに従って小さくなるように前記ブレーキ液圧を補正することを特徴とする請求項1または3記載の車両用転舵制御装置。
【請求項5】
前記ブレーキ液圧補正手段は、前記車両が停車したときまたは前記ブレーキペダルの前記踏み込み操作がなくなったとき、保持している前記ブレーキ液圧の最大値を初期値にリセットすることを特徴とする請求項2記載の車両用転舵制御装置。
【請求項6】
前記ブレーキ液圧補正手段は、前記ブレーキ液圧の最大値を保持してから所定時間が経過した後、保持している前記ブレーキ液圧の最大値を初期値にリセットすることを特徴とする請求項2または5記載の車両用転舵制御装置。
【請求項7】
制動時の車輪のロックに応じてABS(Antilock Brake System)制御を行うABS制御手段の作動状態を検出するABS作動状態検出手段を備え、
前記ブレーキ液圧補正手段は、前記ABS制御手段が作動状態になったとき、保持している前記ブレーキ液圧の最大値を初期値にリセットすると共に、前記ABS制御手段が動作中は前記ブレーキ液圧の補正を行わないことを特徴とする請求項2,5,6のいずれか1項に記載の車両用転舵制御装置。
【請求項8】
制動時の車輪のロックに応じてABS(Antilock Brake System)制御を行うABS制御手段の作動状態を検出するABS作動状態検出手段を備え、
前記路面摩擦係数推定手段は、前記ABS制御手段が非作動状態であるとき、所定の路面状況に対応する路面摩擦係数である第1の所定値を前記推定した路面摩擦係数とすることを特徴とする請求項1〜6のいずれか1項に記載の車両用転舵制御装置。
【請求項9】
前記路面摩擦係数推定手段は、前記ブレーキ液圧に基づいて推定した路面摩擦係数が所定の路面状況に対応する路面摩擦係数である第2の所定値以下のときは、前記第2の所定値を前記推定した路面摩擦係数とすることを特徴とする請求項1〜7のいずれか1項に記載の車両用転舵制御装置。
【請求項10】
前記路面摩擦係数推定手段は、前記ブレーキ液圧に基づいて推定した路面摩擦係数と前記推定した路面摩擦係数よりも大きい第3の所定値との平均値を前記推定した前記路面摩擦係数とすることを特徴とする請求項1〜7のいずれか1項に記載の車両用転舵制御装置。
【請求項11】
前記路面摩擦係数推定手段は、前記第3の所定値を、段階的な大きさの数値で複数設定し、
前記平均値の算出において、前記複数の第3の所定値のうち一番小さい数値のものから順に用い、前記推定した路面摩擦係数が現段階の前記第3の所定値を超える毎に、前記平均値の算出に用いる第3の所定値を次の段階のものに切り替えることを特徴とする請求項10記載の車両用転舵制御装置。
【請求項12】
運転者が操舵する車両のステアリングホイールの操舵角と車速とに基づいて操向輪の目標転舵角を演算する目標転舵角演算ステップ、
ブレーキペダルの踏み込み操作に応じてマスターシリンダから発生するブレーキ液圧を検出するブレーキ液圧検出ステップ、
前記ブレーキ液圧に基づいて路面摩擦係数を推定する路面摩擦係数推定ステップ、
前記ブレーキ液圧の変動に基づいて、前記路面摩擦係数の推定に用いるブレーキ液圧を補正するブレーキ液圧補正ステップ、
前記路面摩擦係数に基づいて目標修正転舵角を演算する目標修正転舵角演算ステップ、
前記前記目標転舵角と前記目標修正転舵角とに基づいて算出した修正転舵角で前記操向輪の転舵機構を駆動制御する転舵制御ステップ、
を有し、前記ブレーキ液圧の上昇中に、前記ブレーキ液圧が減少方向に変動したとき、そのときの前記路面摩擦係数の推定に用いるブレーキ液圧を増加補正することを特徴とする車両用転舵制御方法。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【公開番号】特開2010−188852(P2010−188852A)
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願番号】特願2009−35001(P2009−35001)
【出願日】平成21年2月18日(2009.2.18)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
【公開日】平成22年9月2日(2010.9.2)
【国際特許分類】
【出願日】平成21年2月18日(2009.2.18)
【出願人】(000003997)日産自動車株式会社 (16,386)
【Fターム(参考)】
[ Back to top ]