
車両用運転支援装置
【課題】交通量の多い走行環境においても、制御対象として不要な車両等を精度良く排除して演算負荷を軽減することができる車両用運転支援装置を提供する。
【解決手段】制御装置10は、車車間通信を通じて検出した他車の中から制御対象となる他車を選定し、地図データ上にマッチングするに際し、制御対象となる他車の選定領域Aを、自車50の道路情報と運転情報とに基づいて可変設定する。これにより、交通量の多い走行環境においても、制御対象として不要な車両等を精度良く排除してマップマッチング等の演算負荷を軽減することができる。
【解決手段】制御装置10は、車車間通信を通じて検出した他車の中から制御対象となる他車を選定し、地図データ上にマッチングするに際し、制御対象となる他車の選定領域Aを、自車50の道路情報と運転情報とに基づいて可変設定する。これにより、交通量の多い走行環境においても、制御対象として不要な車両等を精度良く排除してマップマッチング等の演算負荷を軽減することができる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、自車の情報と車車間通信により他車から取得した情報とを用いて運転支援を行う車両用運転支援装置に関する。
【背景技術】
【0002】
近年、自動車等の車両の交通状況の改善と安全性向上のため、エレクトロニクス技術を用いて人と道路と車両とを一体のシステムとして構築し、ナビゲーションシステムの高度化、有料道路等の自動料金収受システムの確立、安全運転の支援、交通管理の最適化、道路管理の効率化を図るITS(Intelligent Transport Systems;高度道路交通システム)の技術開発が進められている。
【0003】
また、ITS技術に対応した自動車として、車両周辺の走行環境や路面の状況等の各種情報を収集するための各種センサや情報認識装置を搭載し、収集した情報や認識結果に基づいてドライバの安全運転を支援するASV(Advanced Safety Vehicle;先進安全自動車)の開発も進められている。
【0004】
このASVにおいては、路上に設置した基地局と車両に搭載する移動局との間で行う路車間通信や、移動局間で行う車車間通信等の無線通信を利用した運転支援について様々な技術が検討されている。例えば、車車間通信を活用した情報交換型の運転支援として、受信した他車情報の中から衝突可能性の高い車両を抽出し、自車ドライバに情報提供や注意喚起を行い、事故防止を図る技術が数多く提案されている。
【0005】
この種の運転支援では、例えば、特許文献1に開示されているように、他車との衝突可能性を判定するため、自車及び他車の位置情報等(例えば、GPSによる緯度・経度・方位等)を用いて道路ネットワークデータへのマップマッチング(マッピング)が行われ、道路上における互いの相対位置関係が導出される。その際、特許文献1の技術では、特に、交通量の多い箇所における演算負荷等を軽減するため、自車から他車までの距離や予め設定された優先順位等を基に、危険度の低い車両を予め排除することで、実際にマッチング処理を行う車両台数の削減が図られている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−65480号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上述の特許文献1に開示された技術は、単に自車から他車までの距離や予め設定された優先順位等に基づいて一義的に車両台数の削減を行うものであるため、常に最適な車両の削減が行われるとは限らず、特に、片側2車線以上を有する都心部の道路等のように自車周辺に多数の車両(通信車両)が存在する走行環境では、マッチング対象となる車両台数を十分な台数まで削減することが困難となる虞がある。その結果、マッチング処理等の負荷が十分に軽減されず、その分、情報提供や注意喚起等の処理に遅れが生じてドライバの不信等を招く虞がある。
【0008】
本発明は上記事情に鑑みてなされたもので、交通量の多い走行環境においても、制御対象として不要な車両等を精度良く排除して演算負荷を軽減することができる車両用運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、車車間通信を用いて他車との間で情報を送受信する車車間通信手段と、前記車車間通信を通じて検出した他車の中から制御対象となる他車を選定し、地図データ上にマッチングするマッチング手段と、前記制御対象となる他車の選定領域を、自車の道路情報と運転情報とに基づいて可変設定する選定領域設定手段と、を備えたことを特徴とする。
【発明の効果】
【0010】
本発明の車両用運転支援装置によれば、交通量の多い走行環境においても、制御対象として不要な車両等を精度良く排除して演算負荷を軽減することができる。
【図面の簡単な説明】
【0011】
【図1】車両用運転支援装置の概略構成図
【図2】運転支援制御ルーチンを示すフローチャート
【図3】選定領域設定サブルーチンを示すフローチャート
【図4】走行環境情報設定サブルーチンを示すフローチャート
【図5】各走行路において設定される小領域を示す説明図
【発明を実施するための形態】
【0012】
以下、図面を参照して本発明の形態を説明する。図面は本発明の一実施形態に係わり、図1は車両用運転支援装置の概略構成図、図2は運転支援制御ルーチンを示すフローチャート、図3は選定領域設定サブルーチンを示すフローチャート、図4は走行環境情報設定サブルーチンを示すフローチャート、図5は各走行路において設定される小領域を示す説明図である。
【0013】
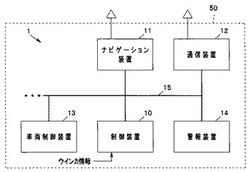
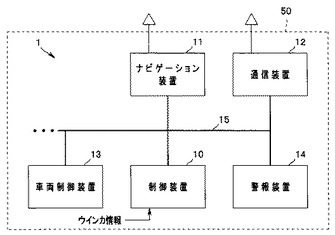
図1に示す運転支援装置1は、周辺の車両(他車)や路肩に設置された通信装置或いは通信センタ等との通信機能を有し、自動車等の車両(自車両)50に搭載されている。本実施形態において、運転支援装置1での通信は自車両50と他車との通信により各種情報を交換する車車間通信を主として構築され、運転支援装置1は、この車車間通信によって取得した情報と自車両50自身で取得した情報とに基づいて、衝突防止支援等の運転支援を行う。
【0014】
この運転支援装置1は、制御装置10を中心として構成され、より具体的には、制御装置10に、ナビゲーション装置11、通信装置12、車両制御装置13、警報装置14等の各装置が、CAN(Controller Area Network)等の車内通信系15を介して双方向通信可能に接続されて要部が構成されている。
【0015】
ナビゲーション装置11は、自車両50の現在位置から目的地までの最適経路の探索や設定された経路の経路案内を出力する等のドライバの経路誘導のための各種動作を行うものであり、自車両50の位置を測位し、この測位した自車位置と地図データとを演算・合成し、地図の縮尺変更、地名の詳細表示、地域情報の表示切換え等の操作入力に対応して、自車両50の現在位置及びその周辺の地図をディスプレイに表示し、また、通信装置12を介して受信した道路・交通情報等の各種情報を表示する。
【0016】
この場合において、具体的には、自車両50の位置は、GPS(Global Positioning System;全世界測位衛星システム)等の測位衛星からの電波に基づく自車両50の位置、地磁気センサ及び車輪速センサからの信号に基づく推測航法による自車両50の位置等に基づいて測位される。また、地図データは、例えば、各種道路情報を備えた複数のノードをリンクで結合した道路ネットワーク情報を主体として構成され、この地図データ上には、測位された自車両50の位置がマップマッチングによって合成される。そして、このように生成された位置情報等の情報は車内通信系15を介して自車両50内の他の装置にも送信され、さらには、通信装置12を介した車車間通信により、他の車両にも送信される。
【0017】
通信装置12は、例えば、ITS(Intelligent Transport Systems;高度道路交通システム)に対応した装置として、道路付帯設備からの光や電波ビーコンを受信して交通渋滞情報、天気情報、特定区域の交通規制情報等の各種情報を取得し、また、自車両50周辺を走行する他の車両との車車間通信を行い、車両情報を授受する車車間通信手段としての機能を有している。本実施形態における車車間通信においては、所定の周波数帯でのキャリア信号を用いて通信可能エリア内に存在する車両との通信を行い、測位情報、車両種別、車両位置、車速、加減速度、ブレーキ作動状態、ウインカ状態等の情報を相互に交換する。
【0018】
車両制御装置13は、エンジン制御、変速機制御、VDC(Vehicle Dynamics Control;ビークルダイナミクスコントロール)等の各制御コントローラから構成されるものであり、一定車速での定速走行制御、自車両50前方を走行する走行車両に対する追従走行制御、自動ブレーキによる減速等の制御機能を備えている。車両制御装置13における自車両50のエンジン回転数、速度(車速)、変速段、ブレーキの作動状態等の運転情報は、車内通信系15に送出される。
【0019】
制御装置10は、通信装置12を用いた車車間通信によって検出された他の車両を、地図データ上にマップマッチングすることで、道路上における自車両50と他車との相対位置関係を導出する。なお、本実施形態において、地図データには、例えば、車内通信系15を介してナビゲーション装置11から供給されるデジタル地図データが用いられる。
【0020】
このようなマップマッチングにおける演算処理を軽減するため、制御装置10は、車車間通信を通じて検出した他車の中から制御対象となる他車を絞り込むための選定処理を行う。本実施形態において、この選定処理では、特に、自車50が第1当事者となり得る衝突事故の相手車両(他車)を中心とした選定が行われるようになっている。本実施形態において、この選定処理は、地図データ上に設定される選定領域A内の他車を抽出することにより行われ、この選定処理に際し、制御装置10は、自車50の道路情報(道路種別、道路形状、道路幅、交差点の有無、信号機の有無等)と、ドライバの運転行動等に伴う運転情報(車速、ウインカ状態等)とに基づいて他車の選定領域Aを可変設定する。なお、自車50のウインカ状態は、例えば、図示しないウインカスイッチから直接的に、或いは、車内通信系15を介して制御装置10に入力される。
【0021】
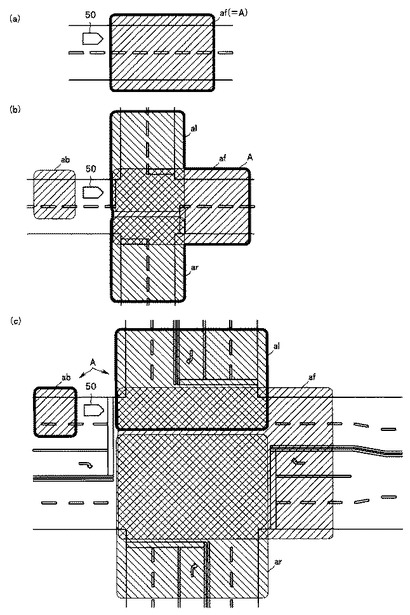
ここで、制御装置10は、例えば、自車50の前方或いは自車50を基準とする複数の方向に個別の小領域aを可変設定し、設定した小領域aの中から選択した1または2以上の方向の小領域aを組み合わせることによって選定領域Aを設定する。より具体的には、制御装置10は、例えば、自車50が直近に交差点の存在しない単路上に位置するとき、自車50の前方向に小領域afを可変設定し、当該小領域afを選定領域Aとして設定する(図5(a)参照)。一方、制御装置10は、例えば、自車50が交差点の直前に位置するとき、自車50の前後左右方向に個別の小領域af,ab,al,arを可変設定し、これらの小領域aから選択した1または2以上の方向の小領域aの組み合わせによって選定領域Aを設定する(図5(b),(c)参照)。なお、図5(b)には、例えば、前、左、及び右方向の小領域af,al,arの組合せによって構成された選定領域Aが太枠で示されており、図5(c)には、例えば、後、及び左方向の小領域ab,alの組合せによって構成された選定領域Aが太枠で示されている。
【0022】
このように、本実施形態において、制御装置10は、マッチング手段、及び、選定領域設定手段としての各機能を実現する。なお、これらの機能は、例えば、ナビゲーション装置11等によって実現させることも可能である。
【0023】
そして、制御装置10は、地図データ上にマップマッチングされた自車50と他車との相対関係に基づいて、自車50の衝突判定を行い、他車との衝突の可能性が高いと判定した場合、警報装置14を通じた警報制御や、車両制御装置13を通じた自動ブレーキによる減速等を適宜行う。
【0024】
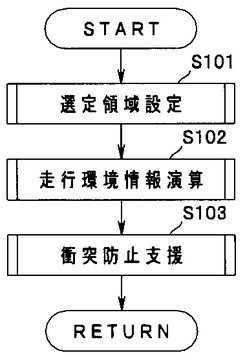
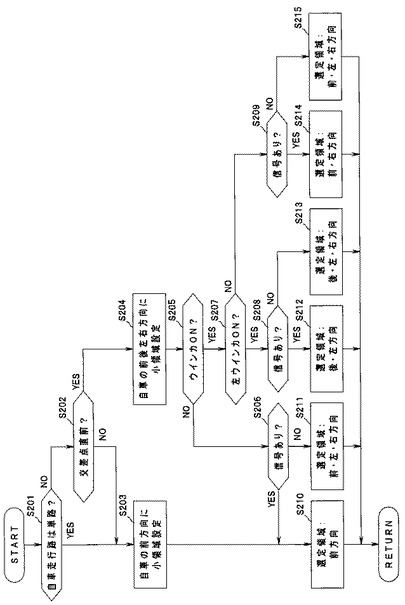
次に、制御装置10で実行される運転支援制御について、図2に示す運転支援制御ルーチンのフローチャートに従って説明する。このルーチンは、設定時間毎に繰り返し実行されるもので、ルーチンがスタートすると、制御装置10は、先ず、ステップS101において、通信装置12での車車間通信を通じて検出された他車の中から制御対象となる他車を選定するための選定領域Aを設定する。この選定領域Aの設定は、例えば、図3に示す選定領域設定サブルーチンのフローチャートに従って実行されるもので、サブルーチンがスタートすると、制御装置10は、先ず、ステップS201において、現在の自車走行路が、自車50前方の設定距離内に交差点を持たない単路であるか否かを調べる。
【0025】
そして、ステップS201において、現在の自車走行路が単路であると判定した場合、制御装置10は、ステップS203に進む。
【0026】
一方、ステップS201において、現在の自車走行路が単路ではなく、自車走行路前方に交差点が存在すると判定すると、制御装置10は、ステップS202に進み、現在の自車位置が交差点の直前であるか否かを調べる。そして、ステップS202において、現在の自車位置が交差点の直前ではないと判定した場合、制御装置10は、ステップS203に進む。
【0027】
ステップS201或いはステップS202からステップS203に進むと、制御装置10は、選定領域Aを構成するための小領域として、自車50の前方向のみに小領域af(図5(a)参照)を設定した後、ステップS210に進む。
【0028】
一方、ステップS202において、現在の自車位置が交差点の直前であると判定した場合、制御装置10は、ステップS204に進み、他車の選定領域Aを構成するための小領域として、自車50の前後左右の各方向(交差点の分岐状態に応じた各方向)に小領域af,ab,al,ar(図5(b),(c)参照)を設定する。
【0029】
この場合、ステップS203或いはステップS204で設定される各小領域aは、道路の延在方向に沿う長さが、例えば、地図データ上の設定リンク数のリンク長、或いは、地図データ上で設定距離内に存在するリンクのリンク長に基づいて設定されるようになっており、設定リンク数或いは設定距離は、例えば、自車50の車速に応じて可変設定される。また、小領域の幅は、例えば、地図データ上のノードに付された道路種別、道路形状、道路幅等の各種情報に応じて可変に設定される。
【0030】
ステップS204からステップS205に進むと、制御装置10は、自車50のウインカがON状態にあるか否かを調べる。
【0031】
そして、ステップS205において、ウインカがOFF状態にあり、ドライバが自車50直前の交差点内を直進する意思があると判定した場合、制御装置10は、ステップS206に進み、地図データ等に基づき、自車50直前の交差点に信号機が存在するか否かを調べる。その結果、制御装置10は、自車50直前の交差点に信号機が存在すると判定した場合にはステップS210に進み、自車直前の交差点に信号機が存在しないと判定した場合にはステップS211に進む。
【0032】
ステップS203或いはステップS206からステップS210に進むと、制御装置10は、自車50の前方の小領域afのみを構成要素とする選定領域Aを設定した後、サブルーチンを抜ける。すなわち、自車50が直近に交差点が存在しない単路等を走行している場合、自車50が第1当事者として衝突する可能性のある他車は、先行車或いは対向車以外は考えにくい。そこで、制御装置10は、自車50前方の小領域afのみを用いて選定領域Aを構成する。また、信号機のある交差点内に自車50が侵入する場合、自車50の右左折方向の道路上に存在する他車は停止していることが予想され、このような交差点内を自車50が直進する場合、自車50が第1当事者として衝突する可能性のある他車は、先行車或いは対向車(特に、交差点内を直進或いは右折する対向車)以外は考え難い。そこで、制御装置10は、自車50の前方向の小領域afのみを用いて選定領域Aを構成する。
【0033】
一方、ステップS206からステップS211に進むと、制御装置10は、自車50の前方向の小領域af、左方向の小領域al、及び、右方向の小領域arを構成要素とする選定領域Aを設定した後、サブルーチンを抜ける。すなわち、信号機のない交差点内に自車50が侵入する場合、自車50が第1当事者として衝突する可能線のある他車としては、先行車或いは対向車(特に、交差点内を直進或いは右折する対向車)に加え、自車50の右左折方向の道路上に存在する他車が考えられる。そこで、制御装置10は、自車50前方向の小領域afに加え、自車50の左右方向の小領域al,arを用いて選定領域Aを構成する。
【0034】
また、ステップS205において、ウインカがON状態にあり、ドライバが交差点内を直進する意思がないと判定した場合、制御装置10は、ステップS207に進み、左折用のウインカがONされているか否かを調べる。
【0035】
そして、ステップS207において、左折用のウインカがON状態にあり、ドライバが自車50直前の交差点内を左折する意思があると判定した場合、制御装置10は、ステップS208に進み、地図データ等に基づき、自車50直前の交差点に信号機が存在するか否かを調べる。その結果、制御装置10は、自車50直前の交差点に信号機が存在すると判定した場合にはステップS212に進み、自車直前の交差点に信号機が存在しないと判定した場合にはステップS213に進む。
【0036】
ステップS208からステップS212に進むと、制御装置10は、自車50後方向の小領域ab及び左方向の小領域alを構成要素とする選定領域Aを設定した後、サブルーチンを抜ける。すなわち、信号機のある交差点内に自車50が侵入する場合、自車50の右左折方向の道路上に存在する他車は停止していることが予想され、このような交差点内を自車50が左折する場合、自車50の右折方向の道路上に存在する他車を、自車50が第1当事者として衝突する可能性のある他車から除外することが可能となる。また、自車50が左折する場合、自車50は、先行車及び対向車の走行路を横切ることなく左折路に侵入するので、監視対象として自車50の前方向を除外することができる。その一方で、自車50が左折する場合、自車50の旋回方向内側に割り込みながら左折するバイク等の後続車(他車)に対する注意が必要となる。そこで、制御装置10は、自車50の後方向の小領域ab及び自車50の左方向の小領域alを用いて選定領域Aを構成する。
【0037】
一方、ステップS208からステップS213に進むと、制御装置10は、自車50の後方向の小領域ab、左方向の小領域al、及び、右方向の小領域arを構成要素とする選定領域Aを設定した後、サブルーチンを抜ける。すなわち、信号機のない交差点に自車50が侵入する場合、自車50が第1当事者として衝突する可能性のある他車としては、自車50の後方向及び自車50の左方向の他車に加え、自車50の右折方向の道路上に存在する他車が考えられる。そこで、制御装置10は、自車50の後方向の小領域ab及び自車50の左方向の小領域alに加え、自車50の右方向の小領域arを用いて選定領域Aを構成する。
【0038】
また、ステップS207において、左折用のウインカがON状態になく(右折用のウインカがON状態にあり)、ドライバが自車50直前の交差点内を右折する意思があると判定した場合、制御装置10は、ステップS209に進み、地図データ等に基づき、自車50直前の交差点に信号機が存在するか否かを調べる。その結果、制御装置10は、自車50直前の交差点に信号機が存在すると判定した場合にはステップS214に進み、自車直前の交差点に信号機が存在しないと判定した場合にはステップS215に進む。
【0039】
ステップS209からステップS214に進むと、制御装置10は、自車50前方向の小領域af及び右方向の小領域arを構成要素とする選定領域Aを設定した後、サブルーチンを抜ける。すなわち、信号機のある交差点内に自車50が侵入する場合、自車50の右左折方向の道路上に存在する他車が停止していることが予想され、このような交差点内を自車50が右折する場合、自車50の左折方向の道路上に存在する他車を、自車50が第1当事者として衝突する可能性がある他車から除外することが可能となる。また、自車50が右折する場合、自車50が後続車を巻き込むことは考え難いため、監視対象として自車50の後方向を除外することができる。その一方で、自車50が右折する場合、交差点内を直進或いは右折する対向車等に対する注意が必要となる。そこで、制御装置10は、自車50の前方向の小領域af及び右方向の小領域arを用いて選定領域Aを構成する。
【0040】
一方、ステップS209からステップS215に進むと、制御装置10は、自車50の前方向の小領域af、左方向の小領域al、及び、右方向の小領域arを構成要素とする選定領域Aを設定した後、サブルーチンを抜ける。すなわち、信号機のない交差点に自車50が侵入する場合、自車50が第1当事者として衝突する可能性のある他車としては、自車50の前方向及び右方向の他車に加え、自車50のさせる方向の道路上に存在する他車が考えられる。そこで、制御装置10は、自車50の前方向の小領域af及び右方向の小領域arに加え、自車50の左方向の小領域alを用いて選定領域Aを構成する。
【0041】
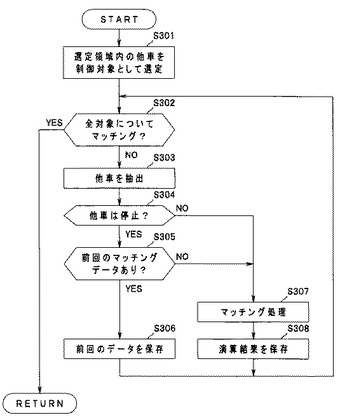
図2のメインルーチンにおいて、ステップS101からステップS102に進むと、制御装置10は、車車間通信等を通じて検出した他車の中から、ステップS101で設定した選定領域A内に存在する他車を抽出(選定)し、選定した他車情報をマップマッチングにより地図データ上に反映させた走行環境情報を演算する。この演算処理は、具体的には、例えば、図4に示す走行環境情報延在サブルーチンのフローチャートに従って実行されるもので、サブルーチンがスタートすると、制御装置10は、先ず、ステップS301において、選定領域A内に存在する他車を制御対象として選定する。
【0042】
そして、ステップS301からステップS302に進むと、制御装置10は、選定した全ての他車について、地図データ上へのマッチングが終了したか否かを調べ、未だ終了いていないと判定した場合には、ステップS303に進む。
【0043】
ステップS302からステップS303に進むと、制御装置10は、未だマップマッチングされていない他車を抽出し、続くステップS304において、抽出した他車は停止しているか否かを調べる。
【0044】
そして、ステップS304において、他車が停止していると判定した場合、制御装置10は、ステップS305に進み、当該他車について前回のマッチングデータが存在するか否かを調べる。
【0045】
そして、ステップS305において、停車中の他車について前回演算したマッチングデータが存在すると判定した場合、制御装置10は、ステップS306に進み、前回のデータを今回のマッチングデータとしてそのまま保存した後、ステップS302に戻る。すなわち、停車中の他車について前回延在したマッチングデータが存在する場合、当該他車は地図データ上において前回と同じ位置に存在するため、制御装置10は、前回のマッチングデータをそのまま流用することで演算を簡素化する。
【0046】
一方、ステップS305において、停車中の他車について前回演算したマッチングデータが存在しないと判定した場合、制御装置10は、ステップS307に進む。
【0047】
ステップS304或いはステップS305からステップS307に進むと、制御装置10は、現在抽出中の他車について、地図データ上へのマッチング処置を行い、続くステップS308において、演算結果を保存した後、ステップS302に戻る。
【0048】
また、ステップS302において、選定した全ての他車について、地図データ上へのマッチングが終了したと判定した場合、制御装置10は、サブルーチンを抜ける。
【0049】
図2のメインルーチンにおいて、ステップS102からステップS103に進むと、制御装置10は、ステップS102で演算した走行環境情報に基づいて他車との衝突防止支援を行った後、ルーチンを抜ける。すなわち、ステップS103において、制御装置10は、認識した走行環境情報に基づいて、他車との衝突判定を行い、衝突する可能性が高いと判定した場合には、警報装置14を通じた警報制御や車両制御装置13を通じた制動制御等を行う。
【0050】
このような実施形態によれば、車車間通信を通じて検出した他車の中から制御対象となる他車を選定し、地図データ上にマッチングするに際し、制御対象となる他車の選定領域Aを、自車50の道路情報と運転情報とに基づいて可変設定することにより、交通量の多い走行環境においても、制御対象として不要な車両等を精度良く排除してマップマッチング等の演算負荷を軽減することができる。
【0051】
この場合において、自車50が交差点の直前に位置するとき、自車50を基準とする複数の方向に個別の小領域aを可変設定し、これらの小領域aから選択した1または2以上の方向の小領域aの組合せによって選定領域Aを構成することにより、好適な選定領域Aを設定することができる。特に、自車の前後左右方向に個別の小領域af,ab,al,arを可変設定し、これらの小領域aから自車50の運転情報等に基づいて選択1または2以上の方向の小領域aの組合せによって選定領域Aを構成することにより、好適な選定領域Aを設定することができる。
【0052】
なお、上述の実施形態においては、交差点が十字路であることを例に説明したが、本発明はこれに限定されるものではなく、例えば、交差点がT字路である場合にも適用が可能である。この場合、例えば、上述のステップS204等の処理において、自車50が進行可能な道路が存在しない方向の小領域af、al、或いは、arを省略することにより、本発明を適用することが可能である。また、本発明は、例えば、交差点が5差路以上である場合にも適用が可能である。この場合、例えば、自車50の進行可能な道路が右方向に2つ存在する場合、上述のステップS204等の処理において、右方向に2つの小領域al(例えば、小領域al1,al2)を設定することにより、本発明を適用することが可能である。
【符号の説明】
【0053】
1 … 運転支援装置
10 … 制御装置(マッチング手段、選定領域設定手段)
11 … ナビゲーション装置
12 … 通信装置(車車間通信手段)
13 … 車両制御装置
14 … 警報装置
15 … 車内通信系
50 … 自車両(自車)
a … 小領域
A … 選定領域
【技術分野】
【0001】
本発明は、自車の情報と車車間通信により他車から取得した情報とを用いて運転支援を行う車両用運転支援装置に関する。
【背景技術】
【0002】
近年、自動車等の車両の交通状況の改善と安全性向上のため、エレクトロニクス技術を用いて人と道路と車両とを一体のシステムとして構築し、ナビゲーションシステムの高度化、有料道路等の自動料金収受システムの確立、安全運転の支援、交通管理の最適化、道路管理の効率化を図るITS(Intelligent Transport Systems;高度道路交通システム)の技術開発が進められている。
【0003】
また、ITS技術に対応した自動車として、車両周辺の走行環境や路面の状況等の各種情報を収集するための各種センサや情報認識装置を搭載し、収集した情報や認識結果に基づいてドライバの安全運転を支援するASV(Advanced Safety Vehicle;先進安全自動車)の開発も進められている。
【0004】
このASVにおいては、路上に設置した基地局と車両に搭載する移動局との間で行う路車間通信や、移動局間で行う車車間通信等の無線通信を利用した運転支援について様々な技術が検討されている。例えば、車車間通信を活用した情報交換型の運転支援として、受信した他車情報の中から衝突可能性の高い車両を抽出し、自車ドライバに情報提供や注意喚起を行い、事故防止を図る技術が数多く提案されている。
【0005】
この種の運転支援では、例えば、特許文献1に開示されているように、他車との衝突可能性を判定するため、自車及び他車の位置情報等(例えば、GPSによる緯度・経度・方位等)を用いて道路ネットワークデータへのマップマッチング(マッピング)が行われ、道路上における互いの相対位置関係が導出される。その際、特許文献1の技術では、特に、交通量の多い箇所における演算負荷等を軽減するため、自車から他車までの距離や予め設定された優先順位等を基に、危険度の低い車両を予め排除することで、実際にマッチング処理を行う車両台数の削減が図られている。
【先行技術文献】
【特許文献】
【0006】
【特許文献1】特開2008−65480号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、上述の特許文献1に開示された技術は、単に自車から他車までの距離や予め設定された優先順位等に基づいて一義的に車両台数の削減を行うものであるため、常に最適な車両の削減が行われるとは限らず、特に、片側2車線以上を有する都心部の道路等のように自車周辺に多数の車両(通信車両)が存在する走行環境では、マッチング対象となる車両台数を十分な台数まで削減することが困難となる虞がある。その結果、マッチング処理等の負荷が十分に軽減されず、その分、情報提供や注意喚起等の処理に遅れが生じてドライバの不信等を招く虞がある。
【0008】
本発明は上記事情に鑑みてなされたもので、交通量の多い走行環境においても、制御対象として不要な車両等を精度良く排除して演算負荷を軽減することができる車両用運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0009】
本発明は、車車間通信を用いて他車との間で情報を送受信する車車間通信手段と、前記車車間通信を通じて検出した他車の中から制御対象となる他車を選定し、地図データ上にマッチングするマッチング手段と、前記制御対象となる他車の選定領域を、自車の道路情報と運転情報とに基づいて可変設定する選定領域設定手段と、を備えたことを特徴とする。
【発明の効果】
【0010】
本発明の車両用運転支援装置によれば、交通量の多い走行環境においても、制御対象として不要な車両等を精度良く排除して演算負荷を軽減することができる。
【図面の簡単な説明】
【0011】
【図1】車両用運転支援装置の概略構成図
【図2】運転支援制御ルーチンを示すフローチャート
【図3】選定領域設定サブルーチンを示すフローチャート
【図4】走行環境情報設定サブルーチンを示すフローチャート
【図5】各走行路において設定される小領域を示す説明図
【発明を実施するための形態】
【0012】
以下、図面を参照して本発明の形態を説明する。図面は本発明の一実施形態に係わり、図1は車両用運転支援装置の概略構成図、図2は運転支援制御ルーチンを示すフローチャート、図3は選定領域設定サブルーチンを示すフローチャート、図4は走行環境情報設定サブルーチンを示すフローチャート、図5は各走行路において設定される小領域を示す説明図である。
【0013】
図1に示す運転支援装置1は、周辺の車両(他車)や路肩に設置された通信装置或いは通信センタ等との通信機能を有し、自動車等の車両(自車両)50に搭載されている。本実施形態において、運転支援装置1での通信は自車両50と他車との通信により各種情報を交換する車車間通信を主として構築され、運転支援装置1は、この車車間通信によって取得した情報と自車両50自身で取得した情報とに基づいて、衝突防止支援等の運転支援を行う。
【0014】
この運転支援装置1は、制御装置10を中心として構成され、より具体的には、制御装置10に、ナビゲーション装置11、通信装置12、車両制御装置13、警報装置14等の各装置が、CAN(Controller Area Network)等の車内通信系15を介して双方向通信可能に接続されて要部が構成されている。
【0015】
ナビゲーション装置11は、自車両50の現在位置から目的地までの最適経路の探索や設定された経路の経路案内を出力する等のドライバの経路誘導のための各種動作を行うものであり、自車両50の位置を測位し、この測位した自車位置と地図データとを演算・合成し、地図の縮尺変更、地名の詳細表示、地域情報の表示切換え等の操作入力に対応して、自車両50の現在位置及びその周辺の地図をディスプレイに表示し、また、通信装置12を介して受信した道路・交通情報等の各種情報を表示する。
【0016】
この場合において、具体的には、自車両50の位置は、GPS(Global Positioning System;全世界測位衛星システム)等の測位衛星からの電波に基づく自車両50の位置、地磁気センサ及び車輪速センサからの信号に基づく推測航法による自車両50の位置等に基づいて測位される。また、地図データは、例えば、各種道路情報を備えた複数のノードをリンクで結合した道路ネットワーク情報を主体として構成され、この地図データ上には、測位された自車両50の位置がマップマッチングによって合成される。そして、このように生成された位置情報等の情報は車内通信系15を介して自車両50内の他の装置にも送信され、さらには、通信装置12を介した車車間通信により、他の車両にも送信される。
【0017】
通信装置12は、例えば、ITS(Intelligent Transport Systems;高度道路交通システム)に対応した装置として、道路付帯設備からの光や電波ビーコンを受信して交通渋滞情報、天気情報、特定区域の交通規制情報等の各種情報を取得し、また、自車両50周辺を走行する他の車両との車車間通信を行い、車両情報を授受する車車間通信手段としての機能を有している。本実施形態における車車間通信においては、所定の周波数帯でのキャリア信号を用いて通信可能エリア内に存在する車両との通信を行い、測位情報、車両種別、車両位置、車速、加減速度、ブレーキ作動状態、ウインカ状態等の情報を相互に交換する。
【0018】
車両制御装置13は、エンジン制御、変速機制御、VDC(Vehicle Dynamics Control;ビークルダイナミクスコントロール)等の各制御コントローラから構成されるものであり、一定車速での定速走行制御、自車両50前方を走行する走行車両に対する追従走行制御、自動ブレーキによる減速等の制御機能を備えている。車両制御装置13における自車両50のエンジン回転数、速度(車速)、変速段、ブレーキの作動状態等の運転情報は、車内通信系15に送出される。
【0019】
制御装置10は、通信装置12を用いた車車間通信によって検出された他の車両を、地図データ上にマップマッチングすることで、道路上における自車両50と他車との相対位置関係を導出する。なお、本実施形態において、地図データには、例えば、車内通信系15を介してナビゲーション装置11から供給されるデジタル地図データが用いられる。
【0020】
このようなマップマッチングにおける演算処理を軽減するため、制御装置10は、車車間通信を通じて検出した他車の中から制御対象となる他車を絞り込むための選定処理を行う。本実施形態において、この選定処理では、特に、自車50が第1当事者となり得る衝突事故の相手車両(他車)を中心とした選定が行われるようになっている。本実施形態において、この選定処理は、地図データ上に設定される選定領域A内の他車を抽出することにより行われ、この選定処理に際し、制御装置10は、自車50の道路情報(道路種別、道路形状、道路幅、交差点の有無、信号機の有無等)と、ドライバの運転行動等に伴う運転情報(車速、ウインカ状態等)とに基づいて他車の選定領域Aを可変設定する。なお、自車50のウインカ状態は、例えば、図示しないウインカスイッチから直接的に、或いは、車内通信系15を介して制御装置10に入力される。
【0021】
ここで、制御装置10は、例えば、自車50の前方或いは自車50を基準とする複数の方向に個別の小領域aを可変設定し、設定した小領域aの中から選択した1または2以上の方向の小領域aを組み合わせることによって選定領域Aを設定する。より具体的には、制御装置10は、例えば、自車50が直近に交差点の存在しない単路上に位置するとき、自車50の前方向に小領域afを可変設定し、当該小領域afを選定領域Aとして設定する(図5(a)参照)。一方、制御装置10は、例えば、自車50が交差点の直前に位置するとき、自車50の前後左右方向に個別の小領域af,ab,al,arを可変設定し、これらの小領域aから選択した1または2以上の方向の小領域aの組み合わせによって選定領域Aを設定する(図5(b),(c)参照)。なお、図5(b)には、例えば、前、左、及び右方向の小領域af,al,arの組合せによって構成された選定領域Aが太枠で示されており、図5(c)には、例えば、後、及び左方向の小領域ab,alの組合せによって構成された選定領域Aが太枠で示されている。
【0022】
このように、本実施形態において、制御装置10は、マッチング手段、及び、選定領域設定手段としての各機能を実現する。なお、これらの機能は、例えば、ナビゲーション装置11等によって実現させることも可能である。
【0023】
そして、制御装置10は、地図データ上にマップマッチングされた自車50と他車との相対関係に基づいて、自車50の衝突判定を行い、他車との衝突の可能性が高いと判定した場合、警報装置14を通じた警報制御や、車両制御装置13を通じた自動ブレーキによる減速等を適宜行う。
【0024】
次に、制御装置10で実行される運転支援制御について、図2に示す運転支援制御ルーチンのフローチャートに従って説明する。このルーチンは、設定時間毎に繰り返し実行されるもので、ルーチンがスタートすると、制御装置10は、先ず、ステップS101において、通信装置12での車車間通信を通じて検出された他車の中から制御対象となる他車を選定するための選定領域Aを設定する。この選定領域Aの設定は、例えば、図3に示す選定領域設定サブルーチンのフローチャートに従って実行されるもので、サブルーチンがスタートすると、制御装置10は、先ず、ステップS201において、現在の自車走行路が、自車50前方の設定距離内に交差点を持たない単路であるか否かを調べる。
【0025】
そして、ステップS201において、現在の自車走行路が単路であると判定した場合、制御装置10は、ステップS203に進む。
【0026】
一方、ステップS201において、現在の自車走行路が単路ではなく、自車走行路前方に交差点が存在すると判定すると、制御装置10は、ステップS202に進み、現在の自車位置が交差点の直前であるか否かを調べる。そして、ステップS202において、現在の自車位置が交差点の直前ではないと判定した場合、制御装置10は、ステップS203に進む。
【0027】
ステップS201或いはステップS202からステップS203に進むと、制御装置10は、選定領域Aを構成するための小領域として、自車50の前方向のみに小領域af(図5(a)参照)を設定した後、ステップS210に進む。
【0028】
一方、ステップS202において、現在の自車位置が交差点の直前であると判定した場合、制御装置10は、ステップS204に進み、他車の選定領域Aを構成するための小領域として、自車50の前後左右の各方向(交差点の分岐状態に応じた各方向)に小領域af,ab,al,ar(図5(b),(c)参照)を設定する。
【0029】
この場合、ステップS203或いはステップS204で設定される各小領域aは、道路の延在方向に沿う長さが、例えば、地図データ上の設定リンク数のリンク長、或いは、地図データ上で設定距離内に存在するリンクのリンク長に基づいて設定されるようになっており、設定リンク数或いは設定距離は、例えば、自車50の車速に応じて可変設定される。また、小領域の幅は、例えば、地図データ上のノードに付された道路種別、道路形状、道路幅等の各種情報に応じて可変に設定される。
【0030】
ステップS204からステップS205に進むと、制御装置10は、自車50のウインカがON状態にあるか否かを調べる。
【0031】
そして、ステップS205において、ウインカがOFF状態にあり、ドライバが自車50直前の交差点内を直進する意思があると判定した場合、制御装置10は、ステップS206に進み、地図データ等に基づき、自車50直前の交差点に信号機が存在するか否かを調べる。その結果、制御装置10は、自車50直前の交差点に信号機が存在すると判定した場合にはステップS210に進み、自車直前の交差点に信号機が存在しないと判定した場合にはステップS211に進む。
【0032】
ステップS203或いはステップS206からステップS210に進むと、制御装置10は、自車50の前方の小領域afのみを構成要素とする選定領域Aを設定した後、サブルーチンを抜ける。すなわち、自車50が直近に交差点が存在しない単路等を走行している場合、自車50が第1当事者として衝突する可能性のある他車は、先行車或いは対向車以外は考えにくい。そこで、制御装置10は、自車50前方の小領域afのみを用いて選定領域Aを構成する。また、信号機のある交差点内に自車50が侵入する場合、自車50の右左折方向の道路上に存在する他車は停止していることが予想され、このような交差点内を自車50が直進する場合、自車50が第1当事者として衝突する可能性のある他車は、先行車或いは対向車(特に、交差点内を直進或いは右折する対向車)以外は考え難い。そこで、制御装置10は、自車50の前方向の小領域afのみを用いて選定領域Aを構成する。
【0033】
一方、ステップS206からステップS211に進むと、制御装置10は、自車50の前方向の小領域af、左方向の小領域al、及び、右方向の小領域arを構成要素とする選定領域Aを設定した後、サブルーチンを抜ける。すなわち、信号機のない交差点内に自車50が侵入する場合、自車50が第1当事者として衝突する可能線のある他車としては、先行車或いは対向車(特に、交差点内を直進或いは右折する対向車)に加え、自車50の右左折方向の道路上に存在する他車が考えられる。そこで、制御装置10は、自車50前方向の小領域afに加え、自車50の左右方向の小領域al,arを用いて選定領域Aを構成する。
【0034】
また、ステップS205において、ウインカがON状態にあり、ドライバが交差点内を直進する意思がないと判定した場合、制御装置10は、ステップS207に進み、左折用のウインカがONされているか否かを調べる。
【0035】
そして、ステップS207において、左折用のウインカがON状態にあり、ドライバが自車50直前の交差点内を左折する意思があると判定した場合、制御装置10は、ステップS208に進み、地図データ等に基づき、自車50直前の交差点に信号機が存在するか否かを調べる。その結果、制御装置10は、自車50直前の交差点に信号機が存在すると判定した場合にはステップS212に進み、自車直前の交差点に信号機が存在しないと判定した場合にはステップS213に進む。
【0036】
ステップS208からステップS212に進むと、制御装置10は、自車50後方向の小領域ab及び左方向の小領域alを構成要素とする選定領域Aを設定した後、サブルーチンを抜ける。すなわち、信号機のある交差点内に自車50が侵入する場合、自車50の右左折方向の道路上に存在する他車は停止していることが予想され、このような交差点内を自車50が左折する場合、自車50の右折方向の道路上に存在する他車を、自車50が第1当事者として衝突する可能性のある他車から除外することが可能となる。また、自車50が左折する場合、自車50は、先行車及び対向車の走行路を横切ることなく左折路に侵入するので、監視対象として自車50の前方向を除外することができる。その一方で、自車50が左折する場合、自車50の旋回方向内側に割り込みながら左折するバイク等の後続車(他車)に対する注意が必要となる。そこで、制御装置10は、自車50の後方向の小領域ab及び自車50の左方向の小領域alを用いて選定領域Aを構成する。
【0037】
一方、ステップS208からステップS213に進むと、制御装置10は、自車50の後方向の小領域ab、左方向の小領域al、及び、右方向の小領域arを構成要素とする選定領域Aを設定した後、サブルーチンを抜ける。すなわち、信号機のない交差点に自車50が侵入する場合、自車50が第1当事者として衝突する可能性のある他車としては、自車50の後方向及び自車50の左方向の他車に加え、自車50の右折方向の道路上に存在する他車が考えられる。そこで、制御装置10は、自車50の後方向の小領域ab及び自車50の左方向の小領域alに加え、自車50の右方向の小領域arを用いて選定領域Aを構成する。
【0038】
また、ステップS207において、左折用のウインカがON状態になく(右折用のウインカがON状態にあり)、ドライバが自車50直前の交差点内を右折する意思があると判定した場合、制御装置10は、ステップS209に進み、地図データ等に基づき、自車50直前の交差点に信号機が存在するか否かを調べる。その結果、制御装置10は、自車50直前の交差点に信号機が存在すると判定した場合にはステップS214に進み、自車直前の交差点に信号機が存在しないと判定した場合にはステップS215に進む。
【0039】
ステップS209からステップS214に進むと、制御装置10は、自車50前方向の小領域af及び右方向の小領域arを構成要素とする選定領域Aを設定した後、サブルーチンを抜ける。すなわち、信号機のある交差点内に自車50が侵入する場合、自車50の右左折方向の道路上に存在する他車が停止していることが予想され、このような交差点内を自車50が右折する場合、自車50の左折方向の道路上に存在する他車を、自車50が第1当事者として衝突する可能性がある他車から除外することが可能となる。また、自車50が右折する場合、自車50が後続車を巻き込むことは考え難いため、監視対象として自車50の後方向を除外することができる。その一方で、自車50が右折する場合、交差点内を直進或いは右折する対向車等に対する注意が必要となる。そこで、制御装置10は、自車50の前方向の小領域af及び右方向の小領域arを用いて選定領域Aを構成する。
【0040】
一方、ステップS209からステップS215に進むと、制御装置10は、自車50の前方向の小領域af、左方向の小領域al、及び、右方向の小領域arを構成要素とする選定領域Aを設定した後、サブルーチンを抜ける。すなわち、信号機のない交差点に自車50が侵入する場合、自車50が第1当事者として衝突する可能性のある他車としては、自車50の前方向及び右方向の他車に加え、自車50のさせる方向の道路上に存在する他車が考えられる。そこで、制御装置10は、自車50の前方向の小領域af及び右方向の小領域arに加え、自車50の左方向の小領域alを用いて選定領域Aを構成する。
【0041】
図2のメインルーチンにおいて、ステップS101からステップS102に進むと、制御装置10は、車車間通信等を通じて検出した他車の中から、ステップS101で設定した選定領域A内に存在する他車を抽出(選定)し、選定した他車情報をマップマッチングにより地図データ上に反映させた走行環境情報を演算する。この演算処理は、具体的には、例えば、図4に示す走行環境情報延在サブルーチンのフローチャートに従って実行されるもので、サブルーチンがスタートすると、制御装置10は、先ず、ステップS301において、選定領域A内に存在する他車を制御対象として選定する。
【0042】
そして、ステップS301からステップS302に進むと、制御装置10は、選定した全ての他車について、地図データ上へのマッチングが終了したか否かを調べ、未だ終了いていないと判定した場合には、ステップS303に進む。
【0043】
ステップS302からステップS303に進むと、制御装置10は、未だマップマッチングされていない他車を抽出し、続くステップS304において、抽出した他車は停止しているか否かを調べる。
【0044】
そして、ステップS304において、他車が停止していると判定した場合、制御装置10は、ステップS305に進み、当該他車について前回のマッチングデータが存在するか否かを調べる。
【0045】
そして、ステップS305において、停車中の他車について前回演算したマッチングデータが存在すると判定した場合、制御装置10は、ステップS306に進み、前回のデータを今回のマッチングデータとしてそのまま保存した後、ステップS302に戻る。すなわち、停車中の他車について前回延在したマッチングデータが存在する場合、当該他車は地図データ上において前回と同じ位置に存在するため、制御装置10は、前回のマッチングデータをそのまま流用することで演算を簡素化する。
【0046】
一方、ステップS305において、停車中の他車について前回演算したマッチングデータが存在しないと判定した場合、制御装置10は、ステップS307に進む。
【0047】
ステップS304或いはステップS305からステップS307に進むと、制御装置10は、現在抽出中の他車について、地図データ上へのマッチング処置を行い、続くステップS308において、演算結果を保存した後、ステップS302に戻る。
【0048】
また、ステップS302において、選定した全ての他車について、地図データ上へのマッチングが終了したと判定した場合、制御装置10は、サブルーチンを抜ける。
【0049】
図2のメインルーチンにおいて、ステップS102からステップS103に進むと、制御装置10は、ステップS102で演算した走行環境情報に基づいて他車との衝突防止支援を行った後、ルーチンを抜ける。すなわち、ステップS103において、制御装置10は、認識した走行環境情報に基づいて、他車との衝突判定を行い、衝突する可能性が高いと判定した場合には、警報装置14を通じた警報制御や車両制御装置13を通じた制動制御等を行う。
【0050】
このような実施形態によれば、車車間通信を通じて検出した他車の中から制御対象となる他車を選定し、地図データ上にマッチングするに際し、制御対象となる他車の選定領域Aを、自車50の道路情報と運転情報とに基づいて可変設定することにより、交通量の多い走行環境においても、制御対象として不要な車両等を精度良く排除してマップマッチング等の演算負荷を軽減することができる。
【0051】
この場合において、自車50が交差点の直前に位置するとき、自車50を基準とする複数の方向に個別の小領域aを可変設定し、これらの小領域aから選択した1または2以上の方向の小領域aの組合せによって選定領域Aを構成することにより、好適な選定領域Aを設定することができる。特に、自車の前後左右方向に個別の小領域af,ab,al,arを可変設定し、これらの小領域aから自車50の運転情報等に基づいて選択1または2以上の方向の小領域aの組合せによって選定領域Aを構成することにより、好適な選定領域Aを設定することができる。
【0052】
なお、上述の実施形態においては、交差点が十字路であることを例に説明したが、本発明はこれに限定されるものではなく、例えば、交差点がT字路である場合にも適用が可能である。この場合、例えば、上述のステップS204等の処理において、自車50が進行可能な道路が存在しない方向の小領域af、al、或いは、arを省略することにより、本発明を適用することが可能である。また、本発明は、例えば、交差点が5差路以上である場合にも適用が可能である。この場合、例えば、自車50の進行可能な道路が右方向に2つ存在する場合、上述のステップS204等の処理において、右方向に2つの小領域al(例えば、小領域al1,al2)を設定することにより、本発明を適用することが可能である。
【符号の説明】
【0053】
1 … 運転支援装置
10 … 制御装置(マッチング手段、選定領域設定手段)
11 … ナビゲーション装置
12 … 通信装置(車車間通信手段)
13 … 車両制御装置
14 … 警報装置
15 … 車内通信系
50 … 自車両(自車)
a … 小領域
A … 選定領域
【特許請求の範囲】
【請求項1】
車車間通信を用いて他車との間で情報を送受信する車車間通信手段と、
前記車車間通信を通じて検出した他車の中から制御対象となる他車を選定し、地図データ上にマッチングするマッチング手段と、
前記制御対象となる他車の選定領域を、自車の道路情報と運転情報とに基づいて可変設定する選定領域設定手段と、を備えたことを特徴とする車両用運転支援装置。
【請求項2】
前記選定領域設定手段は、自車が交差点の直前に位置するとき、自車を基準とする複数の方向に個別の小領域を可変設定し、これらの小領域から選択した1または2以上の方向の前記小領域の組合せによって前記選定領域を構成することを特徴とする請求項1記載の車両用運転支援装置。
【請求項3】
前記選定領域設定手段は、自車のウインカ情報に基づいて、選択する前記小領域の組合せを可変設定することを特徴とする請求項2記載の車両用運転支援装置。
【請求項4】
前記選定領域設定手段は、前記交差点上の信号機の有無に基づいて、選択する前記小領域の組合せを可変設定することを特徴とする請求項3記載の車両用運転支援装置。
【請求項5】
前記選定領域設定手段は、自車が交差点の直前に位置するとき、自車の前後左右方向に個別の小領域を可変設定し、これらの小領域から選択した1または2以上の方向の前記小領域の組合せによって前記選定領域を構成することを特徴とする請求項1記載の車両用運転支援装置。
【請求項6】
前記選定領域設定手段は、自車のウインカ情報に基づいて前記交差点内を自車が直進すると判定したとき、自車の前、左、及び、右方向の前記小領域の組合せによって前記選定領域を構成することを特徴とする請求項5記載の車両用運転支援装置。
【請求項7】
前記選定領域設定手段は、前記交差点上に信号機が存在するとき、前記選定領域から、左、及び、右方向の前記小領域を除外することを特徴とする請求項6記載の車両用運転支援装置。
【請求項8】
前記選定領域設定手段は、自車のウインカ情報に基づいて前記交差点内を自車が左折すると判定したとき、自車の後、左、及び、右方向の前記小領域の組合せによって前記選定領域を構成することを特徴とする請求項5記載の車両用運転支援装置。
【請求項9】
前記選定領域設定手段は、前記交差点上に信号機が存在するとき、前記選定領域から、右方向の前記小領域を除外することを特徴とする請求項8記載の車両用運転支援装置。
【請求項10】
前記選定領域設定手段は、自車のウインカ情報に基づいて前記交差点内を自車が右折すると判定したとき、自車の前、左、及び、右方向の前記両領域の組合せによって前記選定領域を構成することを特徴とする請求項5記載の車両用運転支援装置。
【請求項11】
前記選定領域設定手段は、前記交差点上に信号機が存在するとき、前記選定領域から、左方向の前記小領域を除外することを特徴とする請求項10記載の車両用運転支援装置。
【請求項12】
前記マッチング手段は、他車の車速が零であるとき、前回のマッチング情報を保持することを特徴とすることを特徴とする請求項1乃至請求項11の何れか1項に記載の車両用運転支援装置。
【請求項1】
車車間通信を用いて他車との間で情報を送受信する車車間通信手段と、
前記車車間通信を通じて検出した他車の中から制御対象となる他車を選定し、地図データ上にマッチングするマッチング手段と、
前記制御対象となる他車の選定領域を、自車の道路情報と運転情報とに基づいて可変設定する選定領域設定手段と、を備えたことを特徴とする車両用運転支援装置。
【請求項2】
前記選定領域設定手段は、自車が交差点の直前に位置するとき、自車を基準とする複数の方向に個別の小領域を可変設定し、これらの小領域から選択した1または2以上の方向の前記小領域の組合せによって前記選定領域を構成することを特徴とする請求項1記載の車両用運転支援装置。
【請求項3】
前記選定領域設定手段は、自車のウインカ情報に基づいて、選択する前記小領域の組合せを可変設定することを特徴とする請求項2記載の車両用運転支援装置。
【請求項4】
前記選定領域設定手段は、前記交差点上の信号機の有無に基づいて、選択する前記小領域の組合せを可変設定することを特徴とする請求項3記載の車両用運転支援装置。
【請求項5】
前記選定領域設定手段は、自車が交差点の直前に位置するとき、自車の前後左右方向に個別の小領域を可変設定し、これらの小領域から選択した1または2以上の方向の前記小領域の組合せによって前記選定領域を構成することを特徴とする請求項1記載の車両用運転支援装置。
【請求項6】
前記選定領域設定手段は、自車のウインカ情報に基づいて前記交差点内を自車が直進すると判定したとき、自車の前、左、及び、右方向の前記小領域の組合せによって前記選定領域を構成することを特徴とする請求項5記載の車両用運転支援装置。
【請求項7】
前記選定領域設定手段は、前記交差点上に信号機が存在するとき、前記選定領域から、左、及び、右方向の前記小領域を除外することを特徴とする請求項6記載の車両用運転支援装置。
【請求項8】
前記選定領域設定手段は、自車のウインカ情報に基づいて前記交差点内を自車が左折すると判定したとき、自車の後、左、及び、右方向の前記小領域の組合せによって前記選定領域を構成することを特徴とする請求項5記載の車両用運転支援装置。
【請求項9】
前記選定領域設定手段は、前記交差点上に信号機が存在するとき、前記選定領域から、右方向の前記小領域を除外することを特徴とする請求項8記載の車両用運転支援装置。
【請求項10】
前記選定領域設定手段は、自車のウインカ情報に基づいて前記交差点内を自車が右折すると判定したとき、自車の前、左、及び、右方向の前記両領域の組合せによって前記選定領域を構成することを特徴とする請求項5記載の車両用運転支援装置。
【請求項11】
前記選定領域設定手段は、前記交差点上に信号機が存在するとき、前記選定領域から、左方向の前記小領域を除外することを特徴とする請求項10記載の車両用運転支援装置。
【請求項12】
前記マッチング手段は、他車の車速が零であるとき、前回のマッチング情報を保持することを特徴とすることを特徴とする請求項1乃至請求項11の何れか1項に記載の車両用運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2011−95929(P2011−95929A)
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願番号】特願2009−248223(P2009−248223)
【出願日】平成21年10月28日(2009.10.28)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
【公開日】平成23年5月12日(2011.5.12)
【国際特許分類】
【出願日】平成21年10月28日(2009.10.28)
【出願人】(000005348)富士重工業株式会社 (3,010)
【Fターム(参考)】
[ Back to top ]