
車両用運転支援装置
【課題】車両周囲の障害物に関する危険性をより認識し易く、車両の安全運転により貢献する車両運転支援装置を提供する。
【解決手段】車両の自車位置・運転情報と、レーダ8が検出する車両周囲の障害物情報とに基づいて、車両に接近しつつある障害物を選出する選出手段13と、選出手段によって選出された障害物が、車両の走行経路上又は走行経路近傍に現れる時間及び位置を予測する予測手段14と、予測手段によって予測された時間及び位置に基づいて、車両のフロントガラス20の部位に、車両のフロントガラスを通して観察される実画像に、障害物が車両の走行経路上又は走行経路近傍に現れた状態を示す画像を重畳するように投影する車両用運転支援装置1。運転者は、視線を逸らさずに、フロントガラスを通して前方を見ている状態で、近い将来、自車両の走行経路上等に現れる障害物に関する危険性をより認識し易くなる。
【解決手段】車両の自車位置・運転情報と、レーダ8が検出する車両周囲の障害物情報とに基づいて、車両に接近しつつある障害物を選出する選出手段13と、選出手段によって選出された障害物が、車両の走行経路上又は走行経路近傍に現れる時間及び位置を予測する予測手段14と、予測手段によって予測された時間及び位置に基づいて、車両のフロントガラス20の部位に、車両のフロントガラスを通して観察される実画像に、障害物が車両の走行経路上又は走行経路近傍に現れた状態を示す画像を重畳するように投影する車両用運転支援装置1。運転者は、視線を逸らさずに、フロントガラスを通して前方を見ている状態で、近い将来、自車両の走行経路上等に現れる障害物に関する危険性をより認識し易くなる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用運転支援装置であって、特に、自車両の周囲の障害物に関する情報を取得して安全運転に資する車両用運転支援装置に関する。
【背景技術】
【0002】
車両用ナビゲーション装置は、例えば特許文献1に記載のように、セットした目的地までの走行経路をディスプレイに表示したり、自動車が走行した経路を保存し、その経路をディスプレイに表示することができる。さらに、車両用ナビゲーション装置の機能に加えて、周囲の障害物を検出し、検出した障害物の情報をディスプレイに表示する車両用運転支援装置も提案されている。
【0003】
このような車両用運転支援装置として、例えば特許文献2には、車両周囲の障害物の情報をユーザに提示する情報提示システムが提案されている。このシステムは、得られた障害物情報を虚像表示装置を用いて車両のフロントガラスに表示して安全運転に寄与するものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−81955号公報
【特許文献2】特開2009−120181号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記特許文献2に記載の情報提示システムにおいては、単に、虚像表示を利用して車両の周囲の障害物情報を運転者等に知らせるだけであるため、危険性が認識しづらく、改善の余地があった。
【0006】
そこで、本発明は、上記従来の技術における問題点に鑑みてなされたものであって、車両周囲の障害物に関する危険性をより認識し易く、車両の安全運転により貢献する車両運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明は、車両用運転支援装置であって、車両の自車位置・運転情報と、レーダが検出する該車両周囲の障害物情報とに基づいて、該車両に接近しつつある障害物を選出する選出手段と、該選出手段によって選出された障害物が、該車両の走行経路上又は走行経路近傍に現れる時間及び位置を予測する予測手段と、該予測手段によって予測された時間及び位置に基づいて、該車両のフロントガラスの部位に、該車両のフロントガラスを通して観察される実画像に、前記障害物が該車両の走行経路上又は走行経路近傍に現れた状態を示す画像を重畳するように投影することを特徴とする。
【0008】
そして、本発明によれば、近い将来、車両に接近しつつある障害物が該車両の走行経路上又は走行経路近傍に現れた状態を示す画像を車両のフロントガラスを通して観察される実画像に重畳するように投影するため、運転者は、視線を逸らさずに、フロントガラスを通して前方を見ている状態で、近い将来、自車両の走行経路上等に現れる障害物に関する危険性をより認識し易くなり、車両の安全運転により貢献することができる。
【0009】
また、上記車両用運転支援装置において、前記レーダが前記車両の側方又は/及び後方から接近しつつある障害物を検出した場合に、前記投影手段は、該車両に接近しつつある障害物に関する情報を、前記車両のフロントガラスの部位に投影することができ、側方又は/及び後方から接近しつつある障害物に関する情報もフロントガラスの部位に投影することで、運転者は、視線を逸らさずにこれらの障害物に関する情報を得ることができ、さらに安全運転に貢献することができる。
【0010】
また、本発明は、車両用運転支援装置であって、車両の自車位置・運転情報と、レーダが検出する該車両周囲の障害物情報とに基づいて、該車両に接近しつつある障害物を選出する選出手段と、該選出手段によって選出された障害物が、該車両の走行経路上又は走行経路近傍に現れる時間及び位置を予測する予測手段と、該予測手段によって予測された時間及び位置に基づいて、車両用ナビゲーション装置の表示部に、前記障害物が該車両の走行経路上又は走行経路近傍に現れた状態を示す画像を表示することを特徴とする。
【0011】
本発明によれば、近い将来、車両に接近しつつある障害物が該車両の走行経路上又は走行経路近傍に現れた状態を示す画像を車両用ナビゲーション装置の表示部に表示するため、運転者は、近い将来、自車両の走行経路上等に現れる障害物に関する危険性をより認識し易くなり、車両の安全運転により貢献することができる。
【0012】
また、上記車両用運転支援装置において、前記レーダが前記車両の側方又は/及び後方から接近しつつある障害物を検出した場合に、前記表示手段は、該車両に接近しつつある障害物に関する情報を、前記車両用ナビゲーション装置の表示部に表示することができ、側方又は/及び後方から接近しつつある障害物に関する情報も表示することで、さらに安全運転に貢献することができる。
【0013】
上記車両用運転支援装置において、さらに、前記車両に接近しつつある障害物に関する情報を、音声によって報知する音声報知手段を備えることができ、音声による報知を組み合わせることで、さらに車両の安全運転に貢献することができる。
【発明の効果】
【0014】
以上のように、本発明によれば、車両周囲の障害物に関する危険性をより認識し易く、車両の安全運転により貢献する車両運転支援装置を提供することが可能となる。
【図面の簡単な説明】
【0015】
【図1】本発明にかかる車両用運転支援装置の一実施の形態を示すブロック図である。
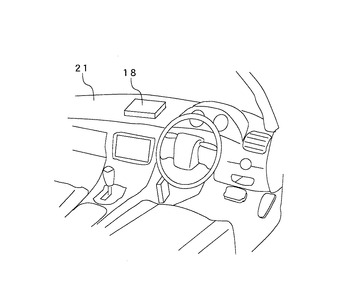
【図2】図1の投影部の設置例を示す概略図である。
【図3】運転支援用動画の一実施の形態を示す概略図である。
【図4】本発明にかかる車両用運転支援装置の動作を示すフローチャートである。
【図5】本発明にかかる車両用運転支援装置の動作を説明するための概略図である。
【発明を実施するための形態】
【0016】
次に、本発明を実施するための形態について、図面を参照しながら詳細に説明する。
【0017】
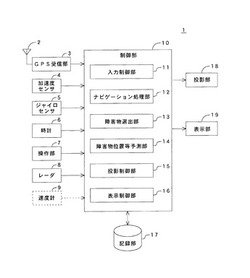
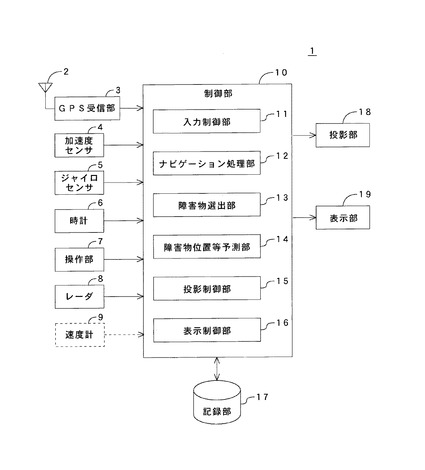
図1は、本発明にかかる車両用運転支援装置の一実施の形態を示し、この車両用運転支援装置1は、車両用ナビゲーション装置としての機能も有し、大別して、GPS(Global Positioning System)アンテナ2と、GPS受信部3と、加速度センサ4と、ジャイロセンサ5と、時計6と、操作部7と、レーダ8と、記録部17と、投影部18と、表示部19と、制御部10等で構成される。尚、制御部10には、車両用運転支援装置1が設置されている車両の既存の速度計9より自車両速度の検出信号が送信される。
【0018】
GPS受信部3は、GPS衛星からのGPS信号をGPSアンテナ2を介して受信する。
【0019】
加速度センサ4は、自車両の走行中の加速度を検出するために備えられ、機械式、光学式、半導体式等種々のセンサを使用することができる。
【0020】
ジャイロセンサ5は、自車両のヨー角速度(回転角速度)等を測位、演算するために備えられ、機械式、光学式のセンサを使用することができる。
【0021】
時計6は、例えば、水晶振動子の発振周波数に基づき、車両用運転支援装置1の現在の時刻情報を生成することができ、バッテリー(不図示)により常時駆動されている。
【0022】
操作部7は、この車両用運転支援装置1をユーザが操作するための操作子を備え、操作子に対する操作に応じた制御信号を出力する。操作子としては、例えば、車両用運転支援装置1の電源をON/OFFするための電源キーや、現在地から目的地までの案内を設定するためのキーなどが設けられる。これらの各種キーは、例えば、車両用運転支援装置1の筐体にハードウェアキーとして設けるようにしてもよいし、表示部19がタッチパネルディスプレイの場合には、各種キーがソフトウェアキーとして表示部19に表示されるようにしてもよい。
【0023】
レーダ8は、自律センサとしてミリ波帯の電波やレーザ光等の検出波によって障害物情報を取得するものであって、検出波を水平方向に全周360度走査しながら自車両の周囲に照射し、周囲に存在する他の車両や自転車、歩行者等の障害物に衝突して反射された反射波を受信し、障害物の形状、大きさ、位置(自車両に対する障害物の離間距離)、方向、接近速度(相対速度)等の障害物情報を取得するために備えられる。尚、レーダ8は、これら取得した障害物情報を第1障害物情報として障害物選出部13に送信する。
【0024】
記録部17は、例えば、HDD(Hard Disc Drive)やフラッシュメモリであり、地図データと、後述の運転支援に利用する種々の動画像等を記録する。
【0025】
投影部18は、図2に示すように、車両のダッシュボード21上に載置され、車両のフロントガラス部分に、後述の運転支援用動画を投影するために設けられる。このような投影部18として、例えば、虚像表示を投影するヘッドアップディスプレイ(Head Up Display:HUD)技術を利用することができる。
【0026】
表示部19は、例えばLCD(Liquid Crystal Display)からなり、地図画面やメニュー画面等を表示する。表示部19としては、例えば、LCD上にタッチセンサを有するタッチパネルが積層されたタッチパネルディスプレイを用いることができる。
【0027】
制御部10は、この車両用運転支援装置1の全体を制御し、入力制御部11と、ナビゲーション処理部12と、障害物選出部13と、障害物位置等予測部14と、投影制御部15と、表示制御部16とで構成される。
【0028】
入力制御部11は、操作部7から供給されるユーザの操作に応じた制御信号に基づき入力内容や選出内容を判別し、操作信号をナビゲーション処理部12へ出力する。
【0029】
ナビゲーション処理部12は、GPS受信部3で受信したGPS信号に基づき、車両の位置(緯度、経度)を示す位置情報を取得する。また、ユーザが操作部7を操作することによって目的地が設定された場合には、入力制御部11からその操作信号を受け取り、記録部17に記録される地図データに基づいて、現在地から目的地までの走行経路を算出する。
【0030】
障害物選出部13は、GPS受信部3、レーダ8等が電気的に接続され、受信した障害物情報及び自車両の位置・運転情報に基づいて、自車両に対して接近しつつある障害物の大きさ、速度等が所定の範囲にある物を選出するために設けられる。
【0031】
障害物位置等予測部14は、障害物選出部13で選出された上記障害物に関する情報及び自車両の位置・運転情報等に基づいて、自車両に対して接近しつつある障害物が自車両の走行経路上又は走行経路近傍に現れる時間及び位置を予測するために設けられ、予測した障害物位置を、第2障害物情報として投影制御部15、表示制御部16に送信する。
【0032】
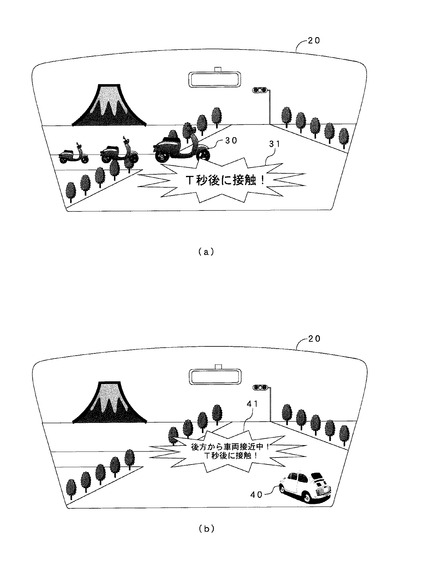
投影制御部15は、障害物位置等予測部14によって生成された第2障害物情報に基づいて、記録部17に記録される動画像を利用して運転支援用動画を生成するために備えられる。運転支援用動画とは、図3(a)に示すように、車両のフロントガラス20に投影されるものであって、例えば、実際の十字路から飛び出すように動く車両キャラクタ30と、それに付随する警告文31とで構成される。
【0033】
表示制御部16は、記録部17から地図データを読み出して地図画像を生成したり、操作部7に対するユーザ操作に応じて表示部19の表示画面を切り替える処理等を行う。また、投影制御部15と同様、第2障害物情報に基づいて、表示部19に表示するための運転支援用動画も生成することができる。
【0034】
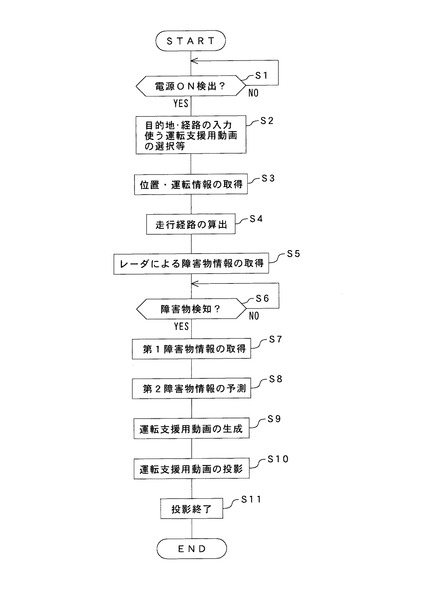
次に、上記構成を有する車両用運転支援装置1の動作について、図4を中心に、図1〜5を参照しながら説明する。
【0035】
ステップS1において、車両用運転支援装置1の電源ON、又はこの車両用運転支援装置1が搭載された車両のエンジンのスタートを検出したか否かが判断される。車両用運転支援装置1の電源ON、又はエンジンのスタートが検出された場合には、処理がステップS2に移行する。一方、車両用運転支援装置1の電源ON、又はエンジンのスタートが検出されなかった場合には、処理がステップS1に戻る。
【0036】
次に、ステップS2において、ユーザが車両用運転支援装置1の操作部7を操作することにより、目的地の設定や、投影する運転支援用動画の選定等を行うと、ナビゲーション処理部12は、ステップS3において、GPS受信部3からのGPS信号に基づいて位置・運転情報を取得し、ステップS4において記録部17に記録される地図データに基づき現在地から目的地までの走行経路を算出する。
【0037】
運転者が車両の運転を開始すると、ステップS5において、GPS受信部3、加速度センサ4と、ジャイロセンサ5等によって自車両の位置・運転情報の更新が随時行われると共に、記録部17に記録される立体地図データと、上記位置・運転情報に基づいてフロントガラス20を通して観察される実画像を投影制御部15において演算により推定する。
【0038】
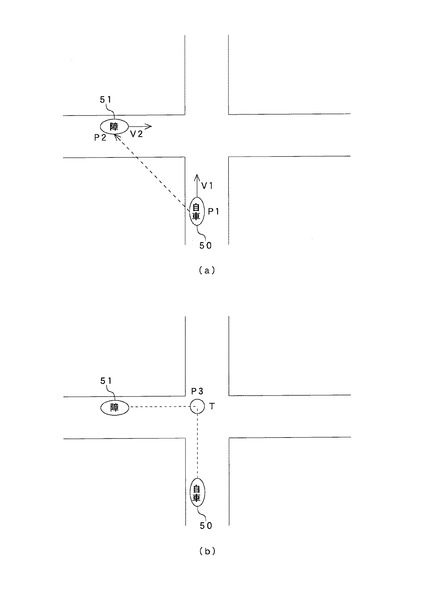
次に、レーダ8によって車両周囲にレーザを照射して車両周囲に障害物51を検知した場合には(ステップS6)、図5(a)に示すように、障害物選出部13は、受信した障害物情報及び自車両50の位置・運転情報に基づいて、自車両50に対して接近しつつある障害物51の大きさ、速度等が所定の範囲にあるか否かを判定し、所定の範囲にある場合には、ステップ7において、障害物51の主に位置P2、速度V2等の情報を、第1障害物情報として取得する。一方、レーダ8によって障害物が検知されなかった場合や、障害物選出部13で障害物の大きさ、速度等が所定の範囲にないと判定された場合には、処理がステップS6に戻る。
【0039】
次に、ステップS8において、障害物位置等予測部14は、上記ステップS7で取得された第1障害物情報と、自車両50の位置・運転情報に基づいて、自車両50に対して接近しつつある障害物51が自車両50の走行経路上又は走行経路近傍に現れる時間T及び位置P3を予測する(図5(b)参照)。この予測は、第1障害物情報と、上記投影制御部15において演算により推定した実画像とを関係づけることにより行われ、関係づけられた情報を第2障害物情報として投影制御部15に送信する。
【0040】
投影制御部15は、ステップS9において、上記第2障害物情報に基づいて、また、記録部17に記録される動画像を利用して、図3(a)に示すように、フロントガラス20を介して視認することのできる上記障害物51が走行経路上に現れる位置P3に、あたかも実際に飛び出してくるような車両キャラクタ30と、それに付随する警告文31とからなる運転支援用動画を生成し、投影部18を介して投影する(ステップS10)。これが、本発明の特徴部分であって、この車両キャラクタ30は、実際の道路から飛び出すように動くため、運転者はより障害物情報を把握しやすく、また、その危険性を実感し易い。この際、図3(a)に示したような警告文に代えて、「5・4・3・2・・」というように、カウントダウンして状況を知らせるようにしてもよい。さらに、上記車両キャラクタ30に代えて、人間型のアニメーションキャラクタが現れて左を指差しながら「もう直ぐ来るから注意して」と警告するようにしてもよい。また、投影制御部15によってフロントガラス20に車両キャラクタ30等を投影する代わりに、表示制御部16によって車両用運転支援装置1の表示部19に車両キャラクタ30等を表示することもできる。
【0041】
運転者は、投影された運転支援用動画に従って、例えば、自車両50の速度を緩めたりして障害物51と接触しないように運転する。自車両50が、障害物51が走行経路上に現れる位置P3を通過すると、ステップS11において、運転支援用動画の投影を終了する。
【0042】
尚、投影する運転支援用動画の投影優先度は、障害物51の位置P2と自車両50の位置P1とが近いもの程高く、また、障害物51の速度V2が速い程高くする。従って、投影制御部15や、表示制御部16は、レーダ8から受信する障害物情報の中から、障害物選出部13によって適宜優先度の高い障害物情報を選出して投影又は表示するよう制御することができ、例えば、障害物51の位置が遠い場合や、速度V2が遅い場合には、運転支援用動画を投影しないように制御することができる。
【0043】
以上のように、本発明によれば、運転者がさらに容易に障害物の情報を把握し易い車両用運転支援装置を提供することが可能となる。
【0044】
尚、上記車両用運転支援装置1においては、前方に障害物が存在する場合について説明したが、これに限らず、例えば、後方から障害物が接近している場合にも、図3(b)に示すように、車両のフロントガラス20の部位に、車両キャラクタ40と警告文41とからなる運転支援用動画を投影することができる。また、車両の左右方向に存在する障害物についても同様に、フロントガラス20の部位に運転支援用動画を投影することができる。また、音声出力部を別途設けることによって、上記警告文31に代えて音声で運転者に知らせるように構成することもできる。これらによって、左方に人がいて走って来ていたり、歩いているときに、このまま左に曲がれば巻き込んでしまう場合や、自車両が右折する場合に、対向車線の影に隠れているバイクがいることを予測して到達位置や時間やタイミング等を警告したりすることができる。
【符号の説明】
【0045】
1 車両用運転支援装置
2 GPSアンテナ
3 GPS受信部
4 加速度センサ
5 ジャイロセンサ
6 時計
7 操作部
8 レーダ
9 速度計
10 制御部
11 入力制御部
12 ナビゲーション処理部
13 障害物選出部
14 障害物位置等予測部
15 投影制御部
16 表示制御部
17 記録部
18 投影部
19 表示部
20 フロントガラス
21 ダッシュボード
30、40 車両キャラクタ
31、41 警告文
50 自車両
51 障害物
【技術分野】
【0001】
本発明は、車両用運転支援装置であって、特に、自車両の周囲の障害物に関する情報を取得して安全運転に資する車両用運転支援装置に関する。
【背景技術】
【0002】
車両用ナビゲーション装置は、例えば特許文献1に記載のように、セットした目的地までの走行経路をディスプレイに表示したり、自動車が走行した経路を保存し、その経路をディスプレイに表示することができる。さらに、車両用ナビゲーション装置の機能に加えて、周囲の障害物を検出し、検出した障害物の情報をディスプレイに表示する車両用運転支援装置も提案されている。
【0003】
このような車両用運転支援装置として、例えば特許文献2には、車両周囲の障害物の情報をユーザに提示する情報提示システムが提案されている。このシステムは、得られた障害物情報を虚像表示装置を用いて車両のフロントガラスに表示して安全運転に寄与するものである。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2002−81955号公報
【特許文献2】特開2009−120181号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、上記特許文献2に記載の情報提示システムにおいては、単に、虚像表示を利用して車両の周囲の障害物情報を運転者等に知らせるだけであるため、危険性が認識しづらく、改善の余地があった。
【0006】
そこで、本発明は、上記従来の技術における問題点に鑑みてなされたものであって、車両周囲の障害物に関する危険性をより認識し易く、車両の安全運転により貢献する車両運転支援装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明は、車両用運転支援装置であって、車両の自車位置・運転情報と、レーダが検出する該車両周囲の障害物情報とに基づいて、該車両に接近しつつある障害物を選出する選出手段と、該選出手段によって選出された障害物が、該車両の走行経路上又は走行経路近傍に現れる時間及び位置を予測する予測手段と、該予測手段によって予測された時間及び位置に基づいて、該車両のフロントガラスの部位に、該車両のフロントガラスを通して観察される実画像に、前記障害物が該車両の走行経路上又は走行経路近傍に現れた状態を示す画像を重畳するように投影することを特徴とする。
【0008】
そして、本発明によれば、近い将来、車両に接近しつつある障害物が該車両の走行経路上又は走行経路近傍に現れた状態を示す画像を車両のフロントガラスを通して観察される実画像に重畳するように投影するため、運転者は、視線を逸らさずに、フロントガラスを通して前方を見ている状態で、近い将来、自車両の走行経路上等に現れる障害物に関する危険性をより認識し易くなり、車両の安全運転により貢献することができる。
【0009】
また、上記車両用運転支援装置において、前記レーダが前記車両の側方又は/及び後方から接近しつつある障害物を検出した場合に、前記投影手段は、該車両に接近しつつある障害物に関する情報を、前記車両のフロントガラスの部位に投影することができ、側方又は/及び後方から接近しつつある障害物に関する情報もフロントガラスの部位に投影することで、運転者は、視線を逸らさずにこれらの障害物に関する情報を得ることができ、さらに安全運転に貢献することができる。
【0010】
また、本発明は、車両用運転支援装置であって、車両の自車位置・運転情報と、レーダが検出する該車両周囲の障害物情報とに基づいて、該車両に接近しつつある障害物を選出する選出手段と、該選出手段によって選出された障害物が、該車両の走行経路上又は走行経路近傍に現れる時間及び位置を予測する予測手段と、該予測手段によって予測された時間及び位置に基づいて、車両用ナビゲーション装置の表示部に、前記障害物が該車両の走行経路上又は走行経路近傍に現れた状態を示す画像を表示することを特徴とする。
【0011】
本発明によれば、近い将来、車両に接近しつつある障害物が該車両の走行経路上又は走行経路近傍に現れた状態を示す画像を車両用ナビゲーション装置の表示部に表示するため、運転者は、近い将来、自車両の走行経路上等に現れる障害物に関する危険性をより認識し易くなり、車両の安全運転により貢献することができる。
【0012】
また、上記車両用運転支援装置において、前記レーダが前記車両の側方又は/及び後方から接近しつつある障害物を検出した場合に、前記表示手段は、該車両に接近しつつある障害物に関する情報を、前記車両用ナビゲーション装置の表示部に表示することができ、側方又は/及び後方から接近しつつある障害物に関する情報も表示することで、さらに安全運転に貢献することができる。
【0013】
上記車両用運転支援装置において、さらに、前記車両に接近しつつある障害物に関する情報を、音声によって報知する音声報知手段を備えることができ、音声による報知を組み合わせることで、さらに車両の安全運転に貢献することができる。
【発明の効果】
【0014】
以上のように、本発明によれば、車両周囲の障害物に関する危険性をより認識し易く、車両の安全運転により貢献する車両運転支援装置を提供することが可能となる。
【図面の簡単な説明】
【0015】
【図1】本発明にかかる車両用運転支援装置の一実施の形態を示すブロック図である。
【図2】図1の投影部の設置例を示す概略図である。
【図3】運転支援用動画の一実施の形態を示す概略図である。
【図4】本発明にかかる車両用運転支援装置の動作を示すフローチャートである。
【図5】本発明にかかる車両用運転支援装置の動作を説明するための概略図である。
【発明を実施するための形態】
【0016】
次に、本発明を実施するための形態について、図面を参照しながら詳細に説明する。
【0017】
図1は、本発明にかかる車両用運転支援装置の一実施の形態を示し、この車両用運転支援装置1は、車両用ナビゲーション装置としての機能も有し、大別して、GPS(Global Positioning System)アンテナ2と、GPS受信部3と、加速度センサ4と、ジャイロセンサ5と、時計6と、操作部7と、レーダ8と、記録部17と、投影部18と、表示部19と、制御部10等で構成される。尚、制御部10には、車両用運転支援装置1が設置されている車両の既存の速度計9より自車両速度の検出信号が送信される。
【0018】
GPS受信部3は、GPS衛星からのGPS信号をGPSアンテナ2を介して受信する。
【0019】
加速度センサ4は、自車両の走行中の加速度を検出するために備えられ、機械式、光学式、半導体式等種々のセンサを使用することができる。
【0020】
ジャイロセンサ5は、自車両のヨー角速度(回転角速度)等を測位、演算するために備えられ、機械式、光学式のセンサを使用することができる。
【0021】
時計6は、例えば、水晶振動子の発振周波数に基づき、車両用運転支援装置1の現在の時刻情報を生成することができ、バッテリー(不図示)により常時駆動されている。
【0022】
操作部7は、この車両用運転支援装置1をユーザが操作するための操作子を備え、操作子に対する操作に応じた制御信号を出力する。操作子としては、例えば、車両用運転支援装置1の電源をON/OFFするための電源キーや、現在地から目的地までの案内を設定するためのキーなどが設けられる。これらの各種キーは、例えば、車両用運転支援装置1の筐体にハードウェアキーとして設けるようにしてもよいし、表示部19がタッチパネルディスプレイの場合には、各種キーがソフトウェアキーとして表示部19に表示されるようにしてもよい。
【0023】
レーダ8は、自律センサとしてミリ波帯の電波やレーザ光等の検出波によって障害物情報を取得するものであって、検出波を水平方向に全周360度走査しながら自車両の周囲に照射し、周囲に存在する他の車両や自転車、歩行者等の障害物に衝突して反射された反射波を受信し、障害物の形状、大きさ、位置(自車両に対する障害物の離間距離)、方向、接近速度(相対速度)等の障害物情報を取得するために備えられる。尚、レーダ8は、これら取得した障害物情報を第1障害物情報として障害物選出部13に送信する。
【0024】
記録部17は、例えば、HDD(Hard Disc Drive)やフラッシュメモリであり、地図データと、後述の運転支援に利用する種々の動画像等を記録する。
【0025】
投影部18は、図2に示すように、車両のダッシュボード21上に載置され、車両のフロントガラス部分に、後述の運転支援用動画を投影するために設けられる。このような投影部18として、例えば、虚像表示を投影するヘッドアップディスプレイ(Head Up Display:HUD)技術を利用することができる。
【0026】
表示部19は、例えばLCD(Liquid Crystal Display)からなり、地図画面やメニュー画面等を表示する。表示部19としては、例えば、LCD上にタッチセンサを有するタッチパネルが積層されたタッチパネルディスプレイを用いることができる。
【0027】
制御部10は、この車両用運転支援装置1の全体を制御し、入力制御部11と、ナビゲーション処理部12と、障害物選出部13と、障害物位置等予測部14と、投影制御部15と、表示制御部16とで構成される。
【0028】
入力制御部11は、操作部7から供給されるユーザの操作に応じた制御信号に基づき入力内容や選出内容を判別し、操作信号をナビゲーション処理部12へ出力する。
【0029】
ナビゲーション処理部12は、GPS受信部3で受信したGPS信号に基づき、車両の位置(緯度、経度)を示す位置情報を取得する。また、ユーザが操作部7を操作することによって目的地が設定された場合には、入力制御部11からその操作信号を受け取り、記録部17に記録される地図データに基づいて、現在地から目的地までの走行経路を算出する。
【0030】
障害物選出部13は、GPS受信部3、レーダ8等が電気的に接続され、受信した障害物情報及び自車両の位置・運転情報に基づいて、自車両に対して接近しつつある障害物の大きさ、速度等が所定の範囲にある物を選出するために設けられる。
【0031】
障害物位置等予測部14は、障害物選出部13で選出された上記障害物に関する情報及び自車両の位置・運転情報等に基づいて、自車両に対して接近しつつある障害物が自車両の走行経路上又は走行経路近傍に現れる時間及び位置を予測するために設けられ、予測した障害物位置を、第2障害物情報として投影制御部15、表示制御部16に送信する。
【0032】
投影制御部15は、障害物位置等予測部14によって生成された第2障害物情報に基づいて、記録部17に記録される動画像を利用して運転支援用動画を生成するために備えられる。運転支援用動画とは、図3(a)に示すように、車両のフロントガラス20に投影されるものであって、例えば、実際の十字路から飛び出すように動く車両キャラクタ30と、それに付随する警告文31とで構成される。
【0033】
表示制御部16は、記録部17から地図データを読み出して地図画像を生成したり、操作部7に対するユーザ操作に応じて表示部19の表示画面を切り替える処理等を行う。また、投影制御部15と同様、第2障害物情報に基づいて、表示部19に表示するための運転支援用動画も生成することができる。
【0034】
次に、上記構成を有する車両用運転支援装置1の動作について、図4を中心に、図1〜5を参照しながら説明する。
【0035】
ステップS1において、車両用運転支援装置1の電源ON、又はこの車両用運転支援装置1が搭載された車両のエンジンのスタートを検出したか否かが判断される。車両用運転支援装置1の電源ON、又はエンジンのスタートが検出された場合には、処理がステップS2に移行する。一方、車両用運転支援装置1の電源ON、又はエンジンのスタートが検出されなかった場合には、処理がステップS1に戻る。
【0036】
次に、ステップS2において、ユーザが車両用運転支援装置1の操作部7を操作することにより、目的地の設定や、投影する運転支援用動画の選定等を行うと、ナビゲーション処理部12は、ステップS3において、GPS受信部3からのGPS信号に基づいて位置・運転情報を取得し、ステップS4において記録部17に記録される地図データに基づき現在地から目的地までの走行経路を算出する。
【0037】
運転者が車両の運転を開始すると、ステップS5において、GPS受信部3、加速度センサ4と、ジャイロセンサ5等によって自車両の位置・運転情報の更新が随時行われると共に、記録部17に記録される立体地図データと、上記位置・運転情報に基づいてフロントガラス20を通して観察される実画像を投影制御部15において演算により推定する。
【0038】
次に、レーダ8によって車両周囲にレーザを照射して車両周囲に障害物51を検知した場合には(ステップS6)、図5(a)に示すように、障害物選出部13は、受信した障害物情報及び自車両50の位置・運転情報に基づいて、自車両50に対して接近しつつある障害物51の大きさ、速度等が所定の範囲にあるか否かを判定し、所定の範囲にある場合には、ステップ7において、障害物51の主に位置P2、速度V2等の情報を、第1障害物情報として取得する。一方、レーダ8によって障害物が検知されなかった場合や、障害物選出部13で障害物の大きさ、速度等が所定の範囲にないと判定された場合には、処理がステップS6に戻る。
【0039】
次に、ステップS8において、障害物位置等予測部14は、上記ステップS7で取得された第1障害物情報と、自車両50の位置・運転情報に基づいて、自車両50に対して接近しつつある障害物51が自車両50の走行経路上又は走行経路近傍に現れる時間T及び位置P3を予測する(図5(b)参照)。この予測は、第1障害物情報と、上記投影制御部15において演算により推定した実画像とを関係づけることにより行われ、関係づけられた情報を第2障害物情報として投影制御部15に送信する。
【0040】
投影制御部15は、ステップS9において、上記第2障害物情報に基づいて、また、記録部17に記録される動画像を利用して、図3(a)に示すように、フロントガラス20を介して視認することのできる上記障害物51が走行経路上に現れる位置P3に、あたかも実際に飛び出してくるような車両キャラクタ30と、それに付随する警告文31とからなる運転支援用動画を生成し、投影部18を介して投影する(ステップS10)。これが、本発明の特徴部分であって、この車両キャラクタ30は、実際の道路から飛び出すように動くため、運転者はより障害物情報を把握しやすく、また、その危険性を実感し易い。この際、図3(a)に示したような警告文に代えて、「5・4・3・2・・」というように、カウントダウンして状況を知らせるようにしてもよい。さらに、上記車両キャラクタ30に代えて、人間型のアニメーションキャラクタが現れて左を指差しながら「もう直ぐ来るから注意して」と警告するようにしてもよい。また、投影制御部15によってフロントガラス20に車両キャラクタ30等を投影する代わりに、表示制御部16によって車両用運転支援装置1の表示部19に車両キャラクタ30等を表示することもできる。
【0041】
運転者は、投影された運転支援用動画に従って、例えば、自車両50の速度を緩めたりして障害物51と接触しないように運転する。自車両50が、障害物51が走行経路上に現れる位置P3を通過すると、ステップS11において、運転支援用動画の投影を終了する。
【0042】
尚、投影する運転支援用動画の投影優先度は、障害物51の位置P2と自車両50の位置P1とが近いもの程高く、また、障害物51の速度V2が速い程高くする。従って、投影制御部15や、表示制御部16は、レーダ8から受信する障害物情報の中から、障害物選出部13によって適宜優先度の高い障害物情報を選出して投影又は表示するよう制御することができ、例えば、障害物51の位置が遠い場合や、速度V2が遅い場合には、運転支援用動画を投影しないように制御することができる。
【0043】
以上のように、本発明によれば、運転者がさらに容易に障害物の情報を把握し易い車両用運転支援装置を提供することが可能となる。
【0044】
尚、上記車両用運転支援装置1においては、前方に障害物が存在する場合について説明したが、これに限らず、例えば、後方から障害物が接近している場合にも、図3(b)に示すように、車両のフロントガラス20の部位に、車両キャラクタ40と警告文41とからなる運転支援用動画を投影することができる。また、車両の左右方向に存在する障害物についても同様に、フロントガラス20の部位に運転支援用動画を投影することができる。また、音声出力部を別途設けることによって、上記警告文31に代えて音声で運転者に知らせるように構成することもできる。これらによって、左方に人がいて走って来ていたり、歩いているときに、このまま左に曲がれば巻き込んでしまう場合や、自車両が右折する場合に、対向車線の影に隠れているバイクがいることを予測して到達位置や時間やタイミング等を警告したりすることができる。
【符号の説明】
【0045】
1 車両用運転支援装置
2 GPSアンテナ
3 GPS受信部
4 加速度センサ
5 ジャイロセンサ
6 時計
7 操作部
8 レーダ
9 速度計
10 制御部
11 入力制御部
12 ナビゲーション処理部
13 障害物選出部
14 障害物位置等予測部
15 投影制御部
16 表示制御部
17 記録部
18 投影部
19 表示部
20 フロントガラス
21 ダッシュボード
30、40 車両キャラクタ
31、41 警告文
50 自車両
51 障害物
【特許請求の範囲】
【請求項1】
車両の自車位置・運転情報と、レーダが検出する該車両周囲の障害物情報とに基づいて、該車両に接近しつつある障害物を選出する選出手段と、
該選出手段によって選出された障害物が、該車両の走行経路上又は走行経路近傍に現れる時間及び位置を予測する予測手段と、
該予測手段によって予測された時間及び位置に基づいて、該車両のフロントガラスの部位に、該車両のフロントガラスを通して観察される実画像に、前記障害物が該車両の走行経路上又は走行経路近傍に現れた状態を示す画像を重畳するように投影することを特徴とする車両用運転支援装置。
【請求項2】
前記レーダが前記車両の側方又は/及び後方から接近しつつある障害物を検出した場合に、前記投影手段は、該車両に接近しつつある障害物に関する情報を、前記車両のフロントガラスの部位に投影することを特徴とする請求項1に記載の車両用運転支援装置。
【請求項3】
車両の自車位置・運転情報と、レーダが検出する該車両周囲の障害物情報とに基づいて、該車両に接近しつつある障害物を選出する選出手段と、
該選出手段によって選出された障害物が、該車両の走行経路上又は走行経路近傍に現れる時間及び位置を予測する予測手段と、
該予測手段によって予測された時間及び位置に基づいて、車両用ナビゲーション装置の表示部に、前記障害物が該車両の走行経路上又は走行経路近傍に現れた状態を示す画像を表示することを特徴とする車両用運転支援装置。
【請求項4】
前記レーダが前記車両の側方又は/及び後方から接近しつつある障害物を検出した場合に、前記表示手段は、該車両に接近しつつある障害物に関する情報を、前記車両用ナビゲーション装置の表示部に表示することを特徴とする請求項3に記載の車両用運転支援装置。
【請求項5】
さらに、前記車両に接近しつつある障害物に関する情報を、音声によって報知する音声報知手段を備えることを特徴とする請求項1乃至4のいずれかに記載の車両用運転支援装置。
【請求項1】
車両の自車位置・運転情報と、レーダが検出する該車両周囲の障害物情報とに基づいて、該車両に接近しつつある障害物を選出する選出手段と、
該選出手段によって選出された障害物が、該車両の走行経路上又は走行経路近傍に現れる時間及び位置を予測する予測手段と、
該予測手段によって予測された時間及び位置に基づいて、該車両のフロントガラスの部位に、該車両のフロントガラスを通して観察される実画像に、前記障害物が該車両の走行経路上又は走行経路近傍に現れた状態を示す画像を重畳するように投影することを特徴とする車両用運転支援装置。
【請求項2】
前記レーダが前記車両の側方又は/及び後方から接近しつつある障害物を検出した場合に、前記投影手段は、該車両に接近しつつある障害物に関する情報を、前記車両のフロントガラスの部位に投影することを特徴とする請求項1に記載の車両用運転支援装置。
【請求項3】
車両の自車位置・運転情報と、レーダが検出する該車両周囲の障害物情報とに基づいて、該車両に接近しつつある障害物を選出する選出手段と、
該選出手段によって選出された障害物が、該車両の走行経路上又は走行経路近傍に現れる時間及び位置を予測する予測手段と、
該予測手段によって予測された時間及び位置に基づいて、車両用ナビゲーション装置の表示部に、前記障害物が該車両の走行経路上又は走行経路近傍に現れた状態を示す画像を表示することを特徴とする車両用運転支援装置。
【請求項4】
前記レーダが前記車両の側方又は/及び後方から接近しつつある障害物を検出した場合に、前記表示手段は、該車両に接近しつつある障害物に関する情報を、前記車両用ナビゲーション装置の表示部に表示することを特徴とする請求項3に記載の車両用運転支援装置。
【請求項5】
さらに、前記車両に接近しつつある障害物に関する情報を、音声によって報知する音声報知手段を備えることを特徴とする請求項1乃至4のいずれかに記載の車両用運転支援装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図2】
【図3】
【図4】
【図5】
【公開番号】特開2012−133699(P2012−133699A)
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願番号】特願2010−286965(P2010−286965)
【出願日】平成22年12月24日(2010.12.24)
【出願人】(500017678)株式会社ソフトウェア・ファクトリー (8)
【Fターム(参考)】
【公開日】平成24年7月12日(2012.7.12)
【国際特許分類】
【出願日】平成22年12月24日(2010.12.24)
【出願人】(500017678)株式会社ソフトウェア・ファクトリー (8)
【Fターム(参考)】
[ Back to top ]