
車両用運転支援装置
【課題】走行路逸脱領域での車両の横方向位置の予測精度を出来る限り高くする。
【解決手段】横方向ずれ量推測部12が、所定時間毎に検出された時系列の横方向ずれ量の検出値に対して、ARモデル又はARXモデルを適用して、現時点から上記所定時間後の車両の横方向ずれ量である推測値を演算するとともに、上記ARモデル又は上記ARXモデルの適用に際して、ARモデルのAR係数又はARXモデルのAR係数及び外部入力係数を、各時点における横方向ずれ量の推測値と当該推測値と同じ時点の検出値との差である残差の二乗の値を重み付けして、それらを加算した値が最小となるように、重み付き最小二乗推定法により算出し、その各時点の残差の二乗和に対する重みを、当該残差と同じ時点の検出値のδ(≧1)乗の値とする。
【解決手段】横方向ずれ量推測部12が、所定時間毎に検出された時系列の横方向ずれ量の検出値に対して、ARモデル又はARXモデルを適用して、現時点から上記所定時間後の車両の横方向ずれ量である推測値を演算するとともに、上記ARモデル又は上記ARXモデルの適用に際して、ARモデルのAR係数又はARXモデルのAR係数及び外部入力係数を、各時点における横方向ずれ量の推測値と当該推測値と同じ時点の検出値との差である残差の二乗の値を重み付けして、それらを加算した値が最小となるように、重み付き最小二乗推定法により算出し、その各時点の残差の二乗和に対する重みを、当該残差と同じ時点の検出値のδ(≧1)乗の値とする。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両が走行している走行路に沿った所定の基準線に対する該車両の横方向ずれ量を、所定時間毎に検出して、現時点及びその直近の所定回数分の時系列の検出値に基づいて、現時点から上記所定時間後の上記車両の横方向ずれ量を推測する車両用運転支援装置に関する技術分野に属する。
【背景技術】
【0002】
従来より、車両の走行路逸脱(車線逸脱)の可能性を予測して、走行路逸脱の可能性が高いときに、逸脱警報を行うようにすることが知られている。例えば特許文献1では、カーブに対して車両が向いている角度をヨー角として検出して、カーブ曲率及び車速に基づいて、そのヨー角を補正し、車速及びヨーレートに基づいて、上記車両の予想軌跡を求め、上記補正されたヨー角及び上記予想軌跡に基づいて上記車両の車線逸脱の可能性を予測し、その予測結果に基づいて警報するようにしている。
【0003】
一方、現時点及び過去の時系列データに対して、ARモデル(自己回帰モデル;AutoRegressive model)又はARXモデル(AutoRegressive model with eXogenous variables model)を適用して、将来の予測値を算出する方法が知られている。例えば特許文献2では、時系列データの出力予測装置として、区分的ARXモデルを適用することが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−38487号公報
【特許文献2】特開2008−297986号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来の走行路逸脱の予測方法では、予測精度が低く、このため、走行路逸脱の判定を早期にかつ正確に予測することが困難であり、誤警報が発生するという問題がある。
【0006】
また、区分的ARXモデルは、動的状態が部分的状態間で連続的に変化する車両用運転支援装置に適用することは困難であるとともに、処理が複雑で処理負担が大きいという問題がある。
【0007】
そこで、現時点及び過去の時系列データに対して、ARモデル又はARXモデルを適用して、現時点から所定時間後の車両の横方向ずれ量である推測値を演算するようにすることが考えられる。この場合、ARモデル又はARXモデルの適用に際して、該ARモデルのAR係数(自己回帰係数ともいう)又は該ARXモデルのAR係数及び外部入力係数を算出する。上記AR係数及び外部入力係数は、通常、各時点における推測値と当該推測値と同じ時点の検出値との差である残差の二乗の値の和が最小となるように、最小二乗推定法により算出する。
【0008】
上記のように最小二乗推定法により上記AR係数及び外部入力係数を算出した場合には、車両の横方向の位置に関係なく、どの横方向位置においても略同じ程度の誤差でもって、推測値が算出される。
【0009】
しかし、上記のような車両用運転支援装置においては、走行路の幅方向中央位置及びその付近の領域での車両の横方向位置の予測精度に比べて、走行路の幅方向の端近傍の領域(走行路逸脱領域という)での車両の横方向位置の予測精度を出来る限り高くする必要があり、どの横方向位置においても略同じ程度の予測精度は必要がない。
【0010】
本発明は、斯かる点に鑑みてなされたものであり、その目的とするところは、走行路逸脱領域での車両の横方向位置の予測精度を出来る限り高くしようとすることにある。
【課題を解決するための手段】
【0011】
上記の目的を達成するために、本発明の車両用運転支援装置では、車両が走行している走行路に沿った所定の基準線に対する該車両の横方向ずれ量を、所定時間毎に検出する横方向ずれ量検出手段と、上記横方向ずれ量検出手段により検出された、現時点及びその直近の所定回数分の時系列の検出値に基づいて、現時点から上記所定時間後の上記車両の横方向ずれ量を推測する横方向ずれ量推測手段と、上記横方向ずれ量推測手段による推測結果に基づいて、上記車両が上記走行路から逸脱する可能性が高いか否かを判定する逸脱判定手段と、上記逸脱判定手段により上記車両が上記走行路から逸脱する可能性が高いと判定されたときに、上記車両の運転者に逸脱警報を報知する報知手段とを備え、上記横方向ずれ量推測手段は、上記横方向ずれ量検出手段により検出された上記時系列の検出値に対して、ARモデル又はARXモデルを適用して、現時点から上記所定時間後の上記車両の横方向ずれ量である推測値を演算するとともに、上記ARモデル又は上記ARXモデルの適用に際して、該ARモデルのAR係数又は該ARXモデルのAR係数及び外部入力係数を、上記各時点における上記推測値と当該推測値と同じ時点の検出値との差である残差の二乗の値を重み付けして、それらを加算した値が最小となるように、重み付き最小二乗推定法により算出するように構成され、上記各時点の残差の二乗和に対する重みが、当該残差と同じ時点の検出値のδ乗の値であり、δの値が1以上に設定されている、という構成とした。
【0012】
上記の構成により、車両の横方向位置(横方向ずれ量の検出値)に応じた値(検出値のδ(≧1)乗の値)を、重み付き最小二乗推定法の重みとして設定することで、走行路逸脱領域での車両の横方向位置の予測精度を向上させることが可能となる。
【0013】
上記車両用運転支援装置において、δの値が1以上2以下に設定されていることが好ましい。
【0014】
これにより、車両が走行路から逸脱する可能性が高い位置にあるときの予測精度を最大限に向上させることができる。
【発明の効果】
【0015】
以上説明したように、本発明の車両用運転支援装置によると、ARモデルのAR係数又はARXモデルのAR係数及び外部入力係数を、各時点における横方向ずれ量の推測値と当該推測値と同じ時点の検出値との差である残差の二乗の値を重み付けして、それらを加算した値が最小となるように、重み付き最小二乗推定法により算出し、その各時点の残差の二乗和に対する重みを、当該残差と同じ時点の検出値のδ(≧1)乗の値としたことにより、走行路逸脱領域での車両の横方向位置の予測精度を向上させることができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態に係る車両用運転支援装置を示すブロック図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態を図面に基づいて詳細に説明する。
【0018】
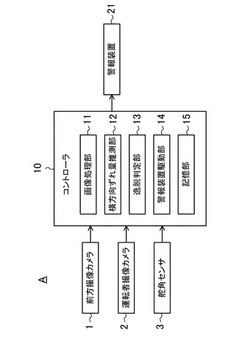
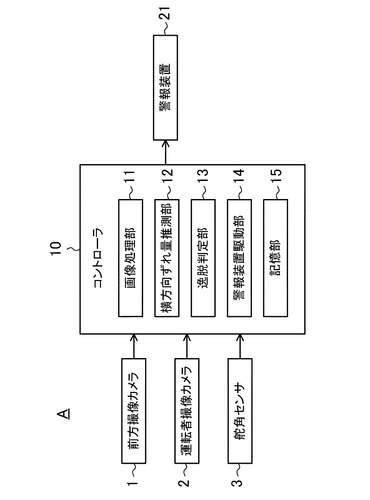
図1は、本発明の実施形態に係る車両用運転支援装置Aを示す。この車両用運転支援装置Aは、自動車等の車両に搭載されて、この車両が、その走行している走行路から逸脱する可能性が高いときに、車両の運転者に逸脱警報を報知するものである。上記走行路は、本実施形態では、幅方向両側が白線で区画された車線とするが、白線がない場合には、道路の幅方向全体となる。
【0019】
上記車両用運転支援装置Aは、上記車両の車幅方向中央に設けられかつ車両前方を撮像する、CCDカメラで構成された前方撮像カメラ1と、車両の車室内のインストルメントパネルにおける運転者前方位置に設けられかつ運転者を撮像する、CCDカメラで構成された運転者撮像カメラ2とを備えている。前方撮像カメラ1及び運転者撮像カメラ2の撮像データは、コントローラ10に入力される。
【0020】
上記コントローラ10は、周知のマイクロコンピュータをベースとするものであって、プログラムを実行する中央算出処理装置(CPU)と、例えばRAMやROMにより構成されてプログラムおよびデータを格納するメモリと、種々の信号の入出力を行うための入出力(I/O)バスとを含む。
【0021】
コントローラ10には、前方撮像カメラ1及び運転者撮像カメラ2からの撮像データに対して画像処理を行って各種情報を取得する画像処理部11が設けられている。
【0022】
上記画像処理部11は、前方撮像カメラ1からの撮像データに基づいて、車線幅(両白線の間隔)、車線の中央仮想線(両白線の中央位置を通る仮想線)に対する前方撮像カメラ1の横方向ずれ量、車線(又は白線)に対する前方撮像カメラ1の角度等を算出する。車線の中央仮想線に対する前方撮像カメラ1の横方向ずれ量は、車線中央からの車両の横方向ずれ量である。車線の中央仮想線は、車両が走行している走行路に沿った所定の基準線に相当する。また、車線に対するカメラの角度は、車線に対する車両の傾き角、つまり車両のヨー角である。
【0023】
また、画像処理部11は、運転者撮像カメラ2からの撮像データに基づいて、運転者の視線方向、運転者の頭部の前後方向及び左右方向の傾き角等を算出する。
【0024】
コントローラ10には、前方撮像カメラ1及び運転者撮像カメラ2からの撮像データに加えて、上記車両のステアリングホイールの操舵角を検出する舵角センサ3からの検出情報が入力される。
【0025】
車両の横方向ずれ量、車両のヨー角、運転者の視線方向、運転者の頭部の前後方向及び左右方向の傾き角、並びに、舵角センサ3による操舵角は、所定時間(例えば1秒〜3秒程度)毎に同じタイミングで検出され、各時点の検出値が、検出された時間に対応付けて、コントローラ10に設けられた記憶部15に記憶されていく。また、後述の如く推測した、車両の横方向ずれ量の推測値も、いつの時点の推測値かが分かるように記憶される。
【0026】
コントローラ10には、現時点から上記所定時間後の車両の横方向ずれ量を推測する横方向ずれ量推測部12と、この横方向ずれ量推測部12による推測結果に基づいて、車両が車線(走行路)から逸脱する可能性が高いか否かを判定する逸脱判定部13と、この逸脱判定部13により車両が、その走行している車線から逸脱する可能性が高いと判定されたときに、車両の運転者に逸脱警報を報知する警報装置21を駆動する警報装置駆動部14とが更に設けられている。
【0027】
上記横方向ずれ量推測部12は、上記画像処理部11により算出された、現時点及びその直近の所定回数分の時系列の横方向ずれ量(検出値)に対して、ARモデル(自己回帰モデル;AutoRegressive model)又はARXモデル(AutoRegressive model with eXogenous variables model)を適用して、現時点から上記所定時間後の上記車両の横方向ずれ量(推測値)を演算する。本実施形態では、その推測値の演算において、上記時系列の横方向ずれ量に加えて、現時点及びその直近の所定回数分(横方向ずれ量の所定回数とは異なっていてもよく、同じであってもよい)の時系列のパラメータ(横方向ずれ量以外のパラメータ)も考慮するARXモデルを用いる。本実施形態では、上記パラメータは、車両のヨー角、運転者の視線方向、運転者の頭部の前後方向及び左右方向の傾き角、並びに、舵角センサによる操舵角である。
【0028】
上記推測値を推測した後、上記所定時間が経過すると、実際の横方向ずれ量が検出され、横方向ずれ量の推測値と当該推測値と同じ時点の横方向ずれ量の検出値との差である残差(誤差)が求まることになる。このように各時点で残差を求めることが可能になる。
【0029】
上記推測値は、ARXモデルを用いて、式(1)の如く表される。
【0030】
【数1】

【0031】
式(1)の左辺は、現時点からt0時間後の横方向ずれ量(推測値)である。y(t−i)は、現時点及びその直近の所定回数(現時点を含めてn回)分の各時点の横方向ずれ量(検出値)である。例えはi=0では、現時点の横方向ずれ量(検出値)であり、i=1では、現時点から1つ前の時点の横方向ずれ量(検出値)である。
【0032】
βi(i=0,1,…,n−1)は、現時点及びその直近の所定回数(n回)分の各時点の横方向ずれ量(検出値)にそれぞれ掛けられるAR係数(自己回帰係数ともいう)である。式(1)の右辺の第1項は、上記各時点の横方向ずれ量(検出値)それぞれにAR係数を掛けて、それらを足し合わせたものに相当する。
【0033】
xi(t)(i=1,2,…,q)は、時刻tにおけるq個(本実施形態では、5個)のパラメータの測定値であり、x1は車両のヨー角であり、x2は運転者の視線方向であり、x3は運転者の頭部の前後方向の傾き角であり、x4は運転者の頭部の左右方向の傾き角であり、x5は操舵角である。ベクトル表記すると、式(2)のようになる。尚、[・]Tは、ベクトル又は行列の転置を意味する。
【0034】
【数2】
【0035】
x1(t−j)(j=0,1,…,m−1)は、現時点及びその直近の所定回数(現時点を含めてm回)分の各時点の車両のヨー角(検出値)である。x2(t−j)(j=0,1,…,m−1)は、現時点及びその直近の所定回数(m回)分の各時点の運転者の視線方向(検出値)であり、x3(t−j)(j=0,1,…,m−1)は、現時点及びその直近の所定回数(m回)分の各時点の運転者の頭部の前後方向の傾き角(検出値)であり、x4(t−j)(j=0,1,…,m−1)は、現時点及びその直近の所定回数(m回)分の各時点の運転者の頭部の左右方向の傾き角(検出値)であり、x5(t−j)(j=0,1,…,m−1)は、現時点及びその直近の所定回数(m回)分の各時点の操舵角(検出値)である。
【0036】
αij(i=1,2,…,q)(j=0,1,…,m−1)は、現時点及びその直近の所定回数(m回)分の各時点の各パラメータにそれぞれ掛けられる外部入力係数であり、各時点のものについてベクトル表記すると、式(3)のようになる。
【0037】
【数3】
【0038】
式(1)の右辺の第2項は、上記各時点の各パラメータ(検出値)それぞれに外部入力係数を掛けて、それらを足し合わせたものに相当する。
【0039】
現時点からt0時間後に横方向ずれ量を検出したとして、その検出値y(t+t0)は、式(4)の如く表される。
【0040】
【数4】
【0041】
式(4)中、ε(t+t0)は、t+t0時点における横方向ずれ量の推測値と当該推測値と同じ時点の横方向ずれ量の検出値との差である残差である。
【0042】
式(1)及び式(4)から式(5)が得られ、式(5)の右辺の第1項を1つの多項式構造として、式(6)のように簡単化する。
【0043】
【数5】
【0044】
現時点の推測値(現時点から上記所定時間前に推測されたもの)及びそれ以前の時点の推測値が合計N個あるとして、式(6)は、式(7)の如く、行列の関係式で表される。式(7)の各ベクトル及び行列は、式(8)〜式(11)に示す通りである。
【0045】
【数6】
【0046】
以上のように簡単化された多項式構造において、重み付き最小二乗推定法により、θベクトル、つまりAR係数及び外部入力係数を算出する。すなわち、AR係数及び外部入力係数を、各時点における横方向ずれ量の推測値と当該推測値と同じ時点の横方向ずれ量の検出値との差である残差の二乗の値を重み付けしてそれらを加算した値が最小となるように、重み付き最小二乗推定法、すなわち式(12)の最小化により算出する。
【0047】
この算出は、式(13)により行う。
【0048】
【数7】
【0049】
ここで、式(13)の重み行列Wは、式(14)で表される対角行列である。また、式(14)におけるwk(k=1,2,…,N)は、上記各時点の残差の二乗和に対する重みであり、式(15)で表される。
【0050】
【数8】
【0051】
式(15)に示すように、上記各時点の残差の二乗和に対する重みは、当該残差と同じ時点の横方向ずれ量の検出値のδ乗の値とする。重み付きのない通常の最小二乗推定法では、δ=0であるが、本実施形態では、δの値が1以上に設定されている。このように車両の横方向位置(横方向ずれ量の検出値)に応じた値を、重み付き最小二乗推定法の重みとして設定することで、横方向ずれ量が大きい領域(走行路逸脱領域)での車両の横方向位置の予測精度を向上させることが可能となる。δの値として特に好ましいのは、1以上2以下である。これは、δの値が2よりも大きいと、重みが大きくなり過ぎて、却って予測精度が悪化するからである。このことは、例えば、検出値を正弦波とし、これに白色雑音のノイズを加えたものを推測値として、シミュレーションを行った結果からも実証される。尚、n及びmの値は、検出値が通常、周期的にふらつくので、例えば数周期分の検出値が得られるような値を予め設定しておけばよい。
【0052】
上記のように重み付き最小二乗推定法により算出されたAR係数及び外部入力係数を式(1)に代入し、t0を上記所定時間とすれば、式(1)より、現時点から上記所定時間後の車両の横方向ずれ量(推測値)が求まる。
【0053】
ここで、δの値を、n、m及びqの値と共に決定する最適な方法を説明する。すなわち、それらの値の選択基準として、GIC(Generalized Infomation Criteria(一般化情報量基準))を用いる。具体的には、下記の式(16)で示されるGIC(n,m,q,δ)の値が最小になるn,m,q及びδの組み合わせを求める。
【0054】
【数9】
【0055】
式(16)中、σハット(σの文字の上に山形の記号を付したもの)の2乗は、各時点(N個分)において上記所定時間後の横方向ずれ量の推測値と当該推測値と同じ時点の検出値との差の分散(予測誤差の分散)である。εjハット(j=1,2,…,N)は、各時点(N個分)において上記所定時間後の横方向ずれ量の推測値と当該推測値と同じ時点の検出値との差(残差)である。Xは、式(9)で表され、Wは、式(14)で表される。xjのアンダーバーは、式(9)で表される行列のj行目をベクトル表記したものである。trace[・]は、行列の対角成分の和である。
【0056】
上記GICを用いることで、残差が1つの分布に従わないような上記ARXモデルにおいて、n、m、q及びδの値を適切に設定することができる。これにより、上記車両の運転者の個性や車両周囲の環境(道路の形状(カーブ又は直進)等)に対応して、車両の横方向ずれ量を、精度良く推測できるようになる。
【0057】
尚、GICを用いて、n、m、q及びδの値を設定したとしても、δの値は1以上になる。また、こうして設定されたqの値により、横方向ずれ量の推測値の演算に考慮されるパラメータが決まる。例えば、q=2であれば、x1である車両のヨー角と、x2である運転者の頭部の前後方向の傾き角とが、横方向ずれ量の推測値の演算に考慮されることになる。
【0058】
上記逸脱判定部13は、上記推測値が、予め設定された基準値よりも大きいときには、車両が車線(走行路)から逸脱する可能性が高いと判定する一方、上記推測値が上記基準値以下であるときには、車両が車線から逸脱する可能性が高くないと判定する。上記基準値は、本実施形態では、車線幅の1/2の値よりも小さくかつ該値に近い値である。
【0059】
上記逸脱判定部13により、車両が車線から逸脱する可能性が高いと判定されたときには、警報装置駆動部14が警報装置21に対して駆動信号を送信することで、警報装置21が作動して運転者に対して逸脱警報がなされ、これにより、運転者は逸脱を回避する行動をとることになる。一方、上記逸脱判定部13により、車両が車線から逸脱する可能性が高くないと判定されたときには、警報装置駆動部14が警報装置21に対して駆動信号を送信することはなく、運転者への逸脱警報はなされない。
【0060】
本実施形態では、前方撮像カメラ1及びコントローラ10の画像処理部11が、車両の横方向ずれ量を所定時間毎に検出する横方向ずれ量検出手段に相当し、コントローラ10の横方向ずれ量推測部12が、現時点から上記所定時間後の車両の横方向ずれ量を推測する横方向ずれ量推測手段に相当する。また、コントローラ10の逸脱判定部13が、上記車両が走行路から逸脱する可能性が高いか否かを判定する逸脱判定手段に相当し、コントローラ10の警報装置駆動部14及び警報装置21が、上記車両の運転者に逸脱警報を報知する報知手段に相当する。
【0061】
したがって、本実施形態では、ARXモデルのAR係数及び外部入力係数を、各時点における横方向ずれ量の推測値と当該推測値と同じ時点の検出値との差である残差の二乗の値を重み付けして、それらを加算した値が最小となるように、重み付き最小二乗推定法により算出し、その各時点の残差の二乗和に対する重みを、当該残差と同じ時点の検出値のδ(≧1)乗の値としたことにより、走行路逸脱領域での車両の横方向位置の予測精度を向上させることができ、車両の運転者に適確な逸脱警報を行うことができる。
【0062】
本発明は、上記実施形態に限られるものではなく、請求の範囲の主旨を逸脱しない範囲で代用が可能である。
【0063】
例えば、上記実施形態では、現時点及びその直近の所定回数分の時系列の横方向ずれ量(検出値)に対して、現時点及びその直近の所定回数分の時系列の車両のヨー角、運転者の視線方向、運転者の頭部の前後方向及び左右方向の傾き角、並びに、舵角センサによる操舵角も考慮したARXモデルを適用して、現時点から所定時間後の車両の横方向ずれ量(推測値)を演算したが、時系列の横方向ずれ量(検出値)に対して、ARモデルを適用して、現時点から所定時間後の車両の横方向ずれ量(推測値)を演算するようにしてもよい。この場合、そのARモデルのAR係数を、上記実施形態と同様にして、重み付き最小二乗推定法により算出すればよい。
【0064】
或いは、ARXモデルを用いる場合でも、横方向ずれ量の推測値の演算において考慮するパラメータの数は、いくつであってもよく、例えば車両のヨー角のみとしてもよい。また、横方向ずれ量の推測値の演算において考慮するパラメータは、上記実施形態で説明したものに限らず、横方向ずれ量に影響を及ぼすものであれば、どのようなものであってもよい。さらに、上記GICを用いて、横方向ずれ量の推測値の演算において考慮するパラメータを決めるようにしてもよい。この場合、x1,x2,…に割り当てるパラメータを、どのようにしてもよいが、横方向ずれ量に大きく影響を及ぼす順に割り当てるのがよい。
【0065】
上述の実施形態は単なる例示に過ぎず、本発明の範囲を限定的に解釈してはならない。本発明の範囲は請求の範囲によって定義され、請求の範囲の均等範囲に属する変形や変更は、全て本発明の範囲内のものである。
【産業上の利用可能性】
【0066】
本発明は、車両が走行している走行路に沿った所定の基準線に対する該車両の横方向ずれ量を、所定時間毎に検出して、現時点及びその直近の所定回数分の時系列の検出値に基づいて、現時点から上記所定時間後の上記車両の横方向ずれ量を推測する車両用運転支援装置に有用である。
【符号の説明】
【0067】
A 車両用運転支援装置
1 前方撮像カメラ(横方向ずれ量検出手段)
10 コントローラ
11 画像処理部(横方向ずれ量検出手段)
12 横方向ずれ量推測部(横方向ずれ量推測手段)
13 逸脱判定部(逸脱判定手段)
14 警報装置駆動部(報知手段)
21 警報装置(報知手段)
【技術分野】
【0001】
本発明は、車両が走行している走行路に沿った所定の基準線に対する該車両の横方向ずれ量を、所定時間毎に検出して、現時点及びその直近の所定回数分の時系列の検出値に基づいて、現時点から上記所定時間後の上記車両の横方向ずれ量を推測する車両用運転支援装置に関する技術分野に属する。
【背景技術】
【0002】
従来より、車両の走行路逸脱(車線逸脱)の可能性を予測して、走行路逸脱の可能性が高いときに、逸脱警報を行うようにすることが知られている。例えば特許文献1では、カーブに対して車両が向いている角度をヨー角として検出して、カーブ曲率及び車速に基づいて、そのヨー角を補正し、車速及びヨーレートに基づいて、上記車両の予想軌跡を求め、上記補正されたヨー角及び上記予想軌跡に基づいて上記車両の車線逸脱の可能性を予測し、その予測結果に基づいて警報するようにしている。
【0003】
一方、現時点及び過去の時系列データに対して、ARモデル(自己回帰モデル;AutoRegressive model)又はARXモデル(AutoRegressive model with eXogenous variables model)を適用して、将来の予測値を算出する方法が知られている。例えば特許文献2では、時系列データの出力予測装置として、区分的ARXモデルを適用することが開示されている。
【先行技術文献】
【特許文献】
【0004】
【特許文献1】特開2004−38487号公報
【特許文献2】特開2008−297986号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、従来の走行路逸脱の予測方法では、予測精度が低く、このため、走行路逸脱の判定を早期にかつ正確に予測することが困難であり、誤警報が発生するという問題がある。
【0006】
また、区分的ARXモデルは、動的状態が部分的状態間で連続的に変化する車両用運転支援装置に適用することは困難であるとともに、処理が複雑で処理負担が大きいという問題がある。
【0007】
そこで、現時点及び過去の時系列データに対して、ARモデル又はARXモデルを適用して、現時点から所定時間後の車両の横方向ずれ量である推測値を演算するようにすることが考えられる。この場合、ARモデル又はARXモデルの適用に際して、該ARモデルのAR係数(自己回帰係数ともいう)又は該ARXモデルのAR係数及び外部入力係数を算出する。上記AR係数及び外部入力係数は、通常、各時点における推測値と当該推測値と同じ時点の検出値との差である残差の二乗の値の和が最小となるように、最小二乗推定法により算出する。
【0008】
上記のように最小二乗推定法により上記AR係数及び外部入力係数を算出した場合には、車両の横方向の位置に関係なく、どの横方向位置においても略同じ程度の誤差でもって、推測値が算出される。
【0009】
しかし、上記のような車両用運転支援装置においては、走行路の幅方向中央位置及びその付近の領域での車両の横方向位置の予測精度に比べて、走行路の幅方向の端近傍の領域(走行路逸脱領域という)での車両の横方向位置の予測精度を出来る限り高くする必要があり、どの横方向位置においても略同じ程度の予測精度は必要がない。
【0010】
本発明は、斯かる点に鑑みてなされたものであり、その目的とするところは、走行路逸脱領域での車両の横方向位置の予測精度を出来る限り高くしようとすることにある。
【課題を解決するための手段】
【0011】
上記の目的を達成するために、本発明の車両用運転支援装置では、車両が走行している走行路に沿った所定の基準線に対する該車両の横方向ずれ量を、所定時間毎に検出する横方向ずれ量検出手段と、上記横方向ずれ量検出手段により検出された、現時点及びその直近の所定回数分の時系列の検出値に基づいて、現時点から上記所定時間後の上記車両の横方向ずれ量を推測する横方向ずれ量推測手段と、上記横方向ずれ量推測手段による推測結果に基づいて、上記車両が上記走行路から逸脱する可能性が高いか否かを判定する逸脱判定手段と、上記逸脱判定手段により上記車両が上記走行路から逸脱する可能性が高いと判定されたときに、上記車両の運転者に逸脱警報を報知する報知手段とを備え、上記横方向ずれ量推測手段は、上記横方向ずれ量検出手段により検出された上記時系列の検出値に対して、ARモデル又はARXモデルを適用して、現時点から上記所定時間後の上記車両の横方向ずれ量である推測値を演算するとともに、上記ARモデル又は上記ARXモデルの適用に際して、該ARモデルのAR係数又は該ARXモデルのAR係数及び外部入力係数を、上記各時点における上記推測値と当該推測値と同じ時点の検出値との差である残差の二乗の値を重み付けして、それらを加算した値が最小となるように、重み付き最小二乗推定法により算出するように構成され、上記各時点の残差の二乗和に対する重みが、当該残差と同じ時点の検出値のδ乗の値であり、δの値が1以上に設定されている、という構成とした。
【0012】
上記の構成により、車両の横方向位置(横方向ずれ量の検出値)に応じた値(検出値のδ(≧1)乗の値)を、重み付き最小二乗推定法の重みとして設定することで、走行路逸脱領域での車両の横方向位置の予測精度を向上させることが可能となる。
【0013】
上記車両用運転支援装置において、δの値が1以上2以下に設定されていることが好ましい。
【0014】
これにより、車両が走行路から逸脱する可能性が高い位置にあるときの予測精度を最大限に向上させることができる。
【発明の効果】
【0015】
以上説明したように、本発明の車両用運転支援装置によると、ARモデルのAR係数又はARXモデルのAR係数及び外部入力係数を、各時点における横方向ずれ量の推測値と当該推測値と同じ時点の検出値との差である残差の二乗の値を重み付けして、それらを加算した値が最小となるように、重み付き最小二乗推定法により算出し、その各時点の残差の二乗和に対する重みを、当該残差と同じ時点の検出値のδ(≧1)乗の値としたことにより、走行路逸脱領域での車両の横方向位置の予測精度を向上させることができる。
【図面の簡単な説明】
【0016】
【図1】本発明の実施形態に係る車両用運転支援装置を示すブロック図である。
【発明を実施するための形態】
【0017】
以下、本発明の実施形態を図面に基づいて詳細に説明する。
【0018】
図1は、本発明の実施形態に係る車両用運転支援装置Aを示す。この車両用運転支援装置Aは、自動車等の車両に搭載されて、この車両が、その走行している走行路から逸脱する可能性が高いときに、車両の運転者に逸脱警報を報知するものである。上記走行路は、本実施形態では、幅方向両側が白線で区画された車線とするが、白線がない場合には、道路の幅方向全体となる。
【0019】
上記車両用運転支援装置Aは、上記車両の車幅方向中央に設けられかつ車両前方を撮像する、CCDカメラで構成された前方撮像カメラ1と、車両の車室内のインストルメントパネルにおける運転者前方位置に設けられかつ運転者を撮像する、CCDカメラで構成された運転者撮像カメラ2とを備えている。前方撮像カメラ1及び運転者撮像カメラ2の撮像データは、コントローラ10に入力される。
【0020】
上記コントローラ10は、周知のマイクロコンピュータをベースとするものであって、プログラムを実行する中央算出処理装置(CPU)と、例えばRAMやROMにより構成されてプログラムおよびデータを格納するメモリと、種々の信号の入出力を行うための入出力(I/O)バスとを含む。
【0021】
コントローラ10には、前方撮像カメラ1及び運転者撮像カメラ2からの撮像データに対して画像処理を行って各種情報を取得する画像処理部11が設けられている。
【0022】
上記画像処理部11は、前方撮像カメラ1からの撮像データに基づいて、車線幅(両白線の間隔)、車線の中央仮想線(両白線の中央位置を通る仮想線)に対する前方撮像カメラ1の横方向ずれ量、車線(又は白線)に対する前方撮像カメラ1の角度等を算出する。車線の中央仮想線に対する前方撮像カメラ1の横方向ずれ量は、車線中央からの車両の横方向ずれ量である。車線の中央仮想線は、車両が走行している走行路に沿った所定の基準線に相当する。また、車線に対するカメラの角度は、車線に対する車両の傾き角、つまり車両のヨー角である。
【0023】
また、画像処理部11は、運転者撮像カメラ2からの撮像データに基づいて、運転者の視線方向、運転者の頭部の前後方向及び左右方向の傾き角等を算出する。
【0024】
コントローラ10には、前方撮像カメラ1及び運転者撮像カメラ2からの撮像データに加えて、上記車両のステアリングホイールの操舵角を検出する舵角センサ3からの検出情報が入力される。
【0025】
車両の横方向ずれ量、車両のヨー角、運転者の視線方向、運転者の頭部の前後方向及び左右方向の傾き角、並びに、舵角センサ3による操舵角は、所定時間(例えば1秒〜3秒程度)毎に同じタイミングで検出され、各時点の検出値が、検出された時間に対応付けて、コントローラ10に設けられた記憶部15に記憶されていく。また、後述の如く推測した、車両の横方向ずれ量の推測値も、いつの時点の推測値かが分かるように記憶される。
【0026】
コントローラ10には、現時点から上記所定時間後の車両の横方向ずれ量を推測する横方向ずれ量推測部12と、この横方向ずれ量推測部12による推測結果に基づいて、車両が車線(走行路)から逸脱する可能性が高いか否かを判定する逸脱判定部13と、この逸脱判定部13により車両が、その走行している車線から逸脱する可能性が高いと判定されたときに、車両の運転者に逸脱警報を報知する警報装置21を駆動する警報装置駆動部14とが更に設けられている。
【0027】
上記横方向ずれ量推測部12は、上記画像処理部11により算出された、現時点及びその直近の所定回数分の時系列の横方向ずれ量(検出値)に対して、ARモデル(自己回帰モデル;AutoRegressive model)又はARXモデル(AutoRegressive model with eXogenous variables model)を適用して、現時点から上記所定時間後の上記車両の横方向ずれ量(推測値)を演算する。本実施形態では、その推測値の演算において、上記時系列の横方向ずれ量に加えて、現時点及びその直近の所定回数分(横方向ずれ量の所定回数とは異なっていてもよく、同じであってもよい)の時系列のパラメータ(横方向ずれ量以外のパラメータ)も考慮するARXモデルを用いる。本実施形態では、上記パラメータは、車両のヨー角、運転者の視線方向、運転者の頭部の前後方向及び左右方向の傾き角、並びに、舵角センサによる操舵角である。
【0028】
上記推測値を推測した後、上記所定時間が経過すると、実際の横方向ずれ量が検出され、横方向ずれ量の推測値と当該推測値と同じ時点の横方向ずれ量の検出値との差である残差(誤差)が求まることになる。このように各時点で残差を求めることが可能になる。
【0029】
上記推測値は、ARXモデルを用いて、式(1)の如く表される。
【0030】
【数1】
【0031】
式(1)の左辺は、現時点からt0時間後の横方向ずれ量(推測値)である。y(t−i)は、現時点及びその直近の所定回数(現時点を含めてn回)分の各時点の横方向ずれ量(検出値)である。例えはi=0では、現時点の横方向ずれ量(検出値)であり、i=1では、現時点から1つ前の時点の横方向ずれ量(検出値)である。
【0032】
βi(i=0,1,…,n−1)は、現時点及びその直近の所定回数(n回)分の各時点の横方向ずれ量(検出値)にそれぞれ掛けられるAR係数(自己回帰係数ともいう)である。式(1)の右辺の第1項は、上記各時点の横方向ずれ量(検出値)それぞれにAR係数を掛けて、それらを足し合わせたものに相当する。
【0033】
xi(t)(i=1,2,…,q)は、時刻tにおけるq個(本実施形態では、5個)のパラメータの測定値であり、x1は車両のヨー角であり、x2は運転者の視線方向であり、x3は運転者の頭部の前後方向の傾き角であり、x4は運転者の頭部の左右方向の傾き角であり、x5は操舵角である。ベクトル表記すると、式(2)のようになる。尚、[・]Tは、ベクトル又は行列の転置を意味する。
【0034】
【数2】
【0035】
x1(t−j)(j=0,1,…,m−1)は、現時点及びその直近の所定回数(現時点を含めてm回)分の各時点の車両のヨー角(検出値)である。x2(t−j)(j=0,1,…,m−1)は、現時点及びその直近の所定回数(m回)分の各時点の運転者の視線方向(検出値)であり、x3(t−j)(j=0,1,…,m−1)は、現時点及びその直近の所定回数(m回)分の各時点の運転者の頭部の前後方向の傾き角(検出値)であり、x4(t−j)(j=0,1,…,m−1)は、現時点及びその直近の所定回数(m回)分の各時点の運転者の頭部の左右方向の傾き角(検出値)であり、x5(t−j)(j=0,1,…,m−1)は、現時点及びその直近の所定回数(m回)分の各時点の操舵角(検出値)である。
【0036】
αij(i=1,2,…,q)(j=0,1,…,m−1)は、現時点及びその直近の所定回数(m回)分の各時点の各パラメータにそれぞれ掛けられる外部入力係数であり、各時点のものについてベクトル表記すると、式(3)のようになる。
【0037】
【数3】
【0038】
式(1)の右辺の第2項は、上記各時点の各パラメータ(検出値)それぞれに外部入力係数を掛けて、それらを足し合わせたものに相当する。
【0039】
現時点からt0時間後に横方向ずれ量を検出したとして、その検出値y(t+t0)は、式(4)の如く表される。
【0040】
【数4】
【0041】
式(4)中、ε(t+t0)は、t+t0時点における横方向ずれ量の推測値と当該推測値と同じ時点の横方向ずれ量の検出値との差である残差である。
【0042】
式(1)及び式(4)から式(5)が得られ、式(5)の右辺の第1項を1つの多項式構造として、式(6)のように簡単化する。
【0043】
【数5】
【0044】
現時点の推測値(現時点から上記所定時間前に推測されたもの)及びそれ以前の時点の推測値が合計N個あるとして、式(6)は、式(7)の如く、行列の関係式で表される。式(7)の各ベクトル及び行列は、式(8)〜式(11)に示す通りである。
【0045】
【数6】
【0046】
以上のように簡単化された多項式構造において、重み付き最小二乗推定法により、θベクトル、つまりAR係数及び外部入力係数を算出する。すなわち、AR係数及び外部入力係数を、各時点における横方向ずれ量の推測値と当該推測値と同じ時点の横方向ずれ量の検出値との差である残差の二乗の値を重み付けしてそれらを加算した値が最小となるように、重み付き最小二乗推定法、すなわち式(12)の最小化により算出する。
【0047】
この算出は、式(13)により行う。
【0048】
【数7】
【0049】
ここで、式(13)の重み行列Wは、式(14)で表される対角行列である。また、式(14)におけるwk(k=1,2,…,N)は、上記各時点の残差の二乗和に対する重みであり、式(15)で表される。
【0050】
【数8】
【0051】
式(15)に示すように、上記各時点の残差の二乗和に対する重みは、当該残差と同じ時点の横方向ずれ量の検出値のδ乗の値とする。重み付きのない通常の最小二乗推定法では、δ=0であるが、本実施形態では、δの値が1以上に設定されている。このように車両の横方向位置(横方向ずれ量の検出値)に応じた値を、重み付き最小二乗推定法の重みとして設定することで、横方向ずれ量が大きい領域(走行路逸脱領域)での車両の横方向位置の予測精度を向上させることが可能となる。δの値として特に好ましいのは、1以上2以下である。これは、δの値が2よりも大きいと、重みが大きくなり過ぎて、却って予測精度が悪化するからである。このことは、例えば、検出値を正弦波とし、これに白色雑音のノイズを加えたものを推測値として、シミュレーションを行った結果からも実証される。尚、n及びmの値は、検出値が通常、周期的にふらつくので、例えば数周期分の検出値が得られるような値を予め設定しておけばよい。
【0052】
上記のように重み付き最小二乗推定法により算出されたAR係数及び外部入力係数を式(1)に代入し、t0を上記所定時間とすれば、式(1)より、現時点から上記所定時間後の車両の横方向ずれ量(推測値)が求まる。
【0053】
ここで、δの値を、n、m及びqの値と共に決定する最適な方法を説明する。すなわち、それらの値の選択基準として、GIC(Generalized Infomation Criteria(一般化情報量基準))を用いる。具体的には、下記の式(16)で示されるGIC(n,m,q,δ)の値が最小になるn,m,q及びδの組み合わせを求める。
【0054】
【数9】
【0055】
式(16)中、σハット(σの文字の上に山形の記号を付したもの)の2乗は、各時点(N個分)において上記所定時間後の横方向ずれ量の推測値と当該推測値と同じ時点の検出値との差の分散(予測誤差の分散)である。εjハット(j=1,2,…,N)は、各時点(N個分)において上記所定時間後の横方向ずれ量の推測値と当該推測値と同じ時点の検出値との差(残差)である。Xは、式(9)で表され、Wは、式(14)で表される。xjのアンダーバーは、式(9)で表される行列のj行目をベクトル表記したものである。trace[・]は、行列の対角成分の和である。
【0056】
上記GICを用いることで、残差が1つの分布に従わないような上記ARXモデルにおいて、n、m、q及びδの値を適切に設定することができる。これにより、上記車両の運転者の個性や車両周囲の環境(道路の形状(カーブ又は直進)等)に対応して、車両の横方向ずれ量を、精度良く推測できるようになる。
【0057】
尚、GICを用いて、n、m、q及びδの値を設定したとしても、δの値は1以上になる。また、こうして設定されたqの値により、横方向ずれ量の推測値の演算に考慮されるパラメータが決まる。例えば、q=2であれば、x1である車両のヨー角と、x2である運転者の頭部の前後方向の傾き角とが、横方向ずれ量の推測値の演算に考慮されることになる。
【0058】
上記逸脱判定部13は、上記推測値が、予め設定された基準値よりも大きいときには、車両が車線(走行路)から逸脱する可能性が高いと判定する一方、上記推測値が上記基準値以下であるときには、車両が車線から逸脱する可能性が高くないと判定する。上記基準値は、本実施形態では、車線幅の1/2の値よりも小さくかつ該値に近い値である。
【0059】
上記逸脱判定部13により、車両が車線から逸脱する可能性が高いと判定されたときには、警報装置駆動部14が警報装置21に対して駆動信号を送信することで、警報装置21が作動して運転者に対して逸脱警報がなされ、これにより、運転者は逸脱を回避する行動をとることになる。一方、上記逸脱判定部13により、車両が車線から逸脱する可能性が高くないと判定されたときには、警報装置駆動部14が警報装置21に対して駆動信号を送信することはなく、運転者への逸脱警報はなされない。
【0060】
本実施形態では、前方撮像カメラ1及びコントローラ10の画像処理部11が、車両の横方向ずれ量を所定時間毎に検出する横方向ずれ量検出手段に相当し、コントローラ10の横方向ずれ量推測部12が、現時点から上記所定時間後の車両の横方向ずれ量を推測する横方向ずれ量推測手段に相当する。また、コントローラ10の逸脱判定部13が、上記車両が走行路から逸脱する可能性が高いか否かを判定する逸脱判定手段に相当し、コントローラ10の警報装置駆動部14及び警報装置21が、上記車両の運転者に逸脱警報を報知する報知手段に相当する。
【0061】
したがって、本実施形態では、ARXモデルのAR係数及び外部入力係数を、各時点における横方向ずれ量の推測値と当該推測値と同じ時点の検出値との差である残差の二乗の値を重み付けして、それらを加算した値が最小となるように、重み付き最小二乗推定法により算出し、その各時点の残差の二乗和に対する重みを、当該残差と同じ時点の検出値のδ(≧1)乗の値としたことにより、走行路逸脱領域での車両の横方向位置の予測精度を向上させることができ、車両の運転者に適確な逸脱警報を行うことができる。
【0062】
本発明は、上記実施形態に限られるものではなく、請求の範囲の主旨を逸脱しない範囲で代用が可能である。
【0063】
例えば、上記実施形態では、現時点及びその直近の所定回数分の時系列の横方向ずれ量(検出値)に対して、現時点及びその直近の所定回数分の時系列の車両のヨー角、運転者の視線方向、運転者の頭部の前後方向及び左右方向の傾き角、並びに、舵角センサによる操舵角も考慮したARXモデルを適用して、現時点から所定時間後の車両の横方向ずれ量(推測値)を演算したが、時系列の横方向ずれ量(検出値)に対して、ARモデルを適用して、現時点から所定時間後の車両の横方向ずれ量(推測値)を演算するようにしてもよい。この場合、そのARモデルのAR係数を、上記実施形態と同様にして、重み付き最小二乗推定法により算出すればよい。
【0064】
或いは、ARXモデルを用いる場合でも、横方向ずれ量の推測値の演算において考慮するパラメータの数は、いくつであってもよく、例えば車両のヨー角のみとしてもよい。また、横方向ずれ量の推測値の演算において考慮するパラメータは、上記実施形態で説明したものに限らず、横方向ずれ量に影響を及ぼすものであれば、どのようなものであってもよい。さらに、上記GICを用いて、横方向ずれ量の推測値の演算において考慮するパラメータを決めるようにしてもよい。この場合、x1,x2,…に割り当てるパラメータを、どのようにしてもよいが、横方向ずれ量に大きく影響を及ぼす順に割り当てるのがよい。
【0065】
上述の実施形態は単なる例示に過ぎず、本発明の範囲を限定的に解釈してはならない。本発明の範囲は請求の範囲によって定義され、請求の範囲の均等範囲に属する変形や変更は、全て本発明の範囲内のものである。
【産業上の利用可能性】
【0066】
本発明は、車両が走行している走行路に沿った所定の基準線に対する該車両の横方向ずれ量を、所定時間毎に検出して、現時点及びその直近の所定回数分の時系列の検出値に基づいて、現時点から上記所定時間後の上記車両の横方向ずれ量を推測する車両用運転支援装置に有用である。
【符号の説明】
【0067】
A 車両用運転支援装置
1 前方撮像カメラ(横方向ずれ量検出手段)
10 コントローラ
11 画像処理部(横方向ずれ量検出手段)
12 横方向ずれ量推測部(横方向ずれ量推測手段)
13 逸脱判定部(逸脱判定手段)
14 警報装置駆動部(報知手段)
21 警報装置(報知手段)
【特許請求の範囲】
【請求項1】
車両が走行している走行路に沿った所定の基準線に対する該車両の横方向ずれ量を、所定時間毎に検出する横方向ずれ量検出手段と、
上記横方向ずれ量検出手段により検出された、現時点及びその直近の所定回数分の時系列の検出値に基づいて、現時点から上記所定時間後の上記車両の横方向ずれ量を推測する横方向ずれ量推測手段と、
上記横方向ずれ量推測手段による推測結果に基づいて、上記車両が上記走行路から逸脱する可能性が高いか否かを判定する逸脱判定手段と、
上記逸脱判定手段により上記車両が上記走行路から逸脱する可能性が高いと判定されたときに、上記車両の運転者に逸脱警報を報知する報知手段とを備え、
上記横方向ずれ量推測手段は、上記横方向ずれ量検出手段により検出された上記時系列の検出値に対して、ARモデル又はARXモデルを適用して、現時点から上記所定時間後の上記車両の横方向ずれ量である推測値を演算するとともに、上記ARモデル又は上記ARXモデルの適用に際して、該ARモデルのAR係数又は該ARXモデルのAR係数及び外部入力係数を、上記各時点における上記推測値と当該推測値と同じ時点の検出値との差である残差の二乗の値を重み付けして、それらを加算した値が最小となるように、重み付き最小二乗推定法により算出するように構成され、
上記各時点の残差の二乗和に対する重みが、当該残差と同じ時点の検出値のδ乗の値であり、
δの値が1以上に設定されていることを特徴とする車両用運転支援装置。
【請求項2】
請求項1記載の車両用運転支援装置において、
δの値が1以上2以下に設定されていることを特徴とする車両用運転支援装置。
【請求項1】
車両が走行している走行路に沿った所定の基準線に対する該車両の横方向ずれ量を、所定時間毎に検出する横方向ずれ量検出手段と、
上記横方向ずれ量検出手段により検出された、現時点及びその直近の所定回数分の時系列の検出値に基づいて、現時点から上記所定時間後の上記車両の横方向ずれ量を推測する横方向ずれ量推測手段と、
上記横方向ずれ量推測手段による推測結果に基づいて、上記車両が上記走行路から逸脱する可能性が高いか否かを判定する逸脱判定手段と、
上記逸脱判定手段により上記車両が上記走行路から逸脱する可能性が高いと判定されたときに、上記車両の運転者に逸脱警報を報知する報知手段とを備え、
上記横方向ずれ量推測手段は、上記横方向ずれ量検出手段により検出された上記時系列の検出値に対して、ARモデル又はARXモデルを適用して、現時点から上記所定時間後の上記車両の横方向ずれ量である推測値を演算するとともに、上記ARモデル又は上記ARXモデルの適用に際して、該ARモデルのAR係数又は該ARXモデルのAR係数及び外部入力係数を、上記各時点における上記推測値と当該推測値と同じ時点の検出値との差である残差の二乗の値を重み付けして、それらを加算した値が最小となるように、重み付き最小二乗推定法により算出するように構成され、
上記各時点の残差の二乗和に対する重みが、当該残差と同じ時点の検出値のδ乗の値であり、
δの値が1以上に設定されていることを特徴とする車両用運転支援装置。
【請求項2】
請求項1記載の車両用運転支援装置において、
δの値が1以上2以下に設定されていることを特徴とする車両用運転支援装置。
【図1】

【公開番号】特開2013−25521(P2013−25521A)
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願番号】特願2011−158888(P2011−158888)
【出願日】平成23年7月20日(2011.7.20)
【出願人】(504145342)国立大学法人九州大学 (960)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
【公開日】平成25年2月4日(2013.2.4)
【国際特許分類】
【出願日】平成23年7月20日(2011.7.20)
【出願人】(504145342)国立大学法人九州大学 (960)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
[ Back to top ]