
車両用電動ブレーキ装置
【課題】自車両の位置や速度に応じて適切に制動力を発生させることにより、車両の安全性を効果的に向上させることが可能な車両電動ブレーキ装置を提供する。
【解決手段】モータ15を駆動源とする電動ブレーキ10の作動により車輪3〜6の回転を制動する車両用電動ブレーキ装置1において、車両が停止すべき位置(停車位置)を検知する停車位置検知手段(23,25等)と、自車速度Vを検知する車速検知手段(21)と、上記停車位置検知手段により自車両Aの周りに停車位置が検知され、かつ上記車速検知手段により自車両Aが停止状態にあることが検知された場合に、上記モータ15を駆動して電動ブレーキ10を作動させる制御ユニット17とを設ける。
【解決手段】モータ15を駆動源とする電動ブレーキ10の作動により車輪3〜6の回転を制動する車両用電動ブレーキ装置1において、車両が停止すべき位置(停車位置)を検知する停車位置検知手段(23,25等)と、自車速度Vを検知する車速検知手段(21)と、上記停車位置検知手段により自車両Aの周りに停車位置が検知され、かつ上記車速検知手段により自車両Aが停止状態にあることが検知された場合に、上記モータ15を駆動して電動ブレーキ10を作動させる制御ユニット17とを設ける。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、電気式アクチュエータを駆動源とする電動ブレーキの作動により車輪の回転を制動する車両用電動ブレーキ装置に関する。
【背景技術】
【0002】
従来から、車輪の回転を制動するブレーキ装置として、電動モータ等からなる電気式アクチュエータを駆動源とした電動ブレーキ装置が知られている。例えば、下記特許文献1には、車両の四輪にそれぞれ設けられた電動ブレーキと、これら各電動ブレーキを個別に駆動する電動モータと、乗員により踏み込み操作されるブレーキペダルと、このブレーキペダルの操作に応じて上記各電動モータを駆動することにより、上記電動ブレーキの作動を制御するモータ制御装置とを備えた車両用電動ブレーキ装置が開示されている。
【特許文献1】特開2000−16258号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、近年では、車両の周囲を撮像する各種カメラや、地図データ等を記憶するナビゲーションユニットなどの様々な機器が車両に搭載されている。したがって、これらの機器から得られる情報を利用して上記電動ブレーキの作動を適切に制御することができれば、車両の安全性等をより向上させることができるが、上記特許文献1には、このような要求に応える技術についての開示は特になされていなかった。
【0004】
本発明は、上記のような事情に鑑みてなされたものであり、自車両の位置や速度に応じて適切に制動力を発生させることにより、車両の安全性を効果的に向上させることが可能な車両電動ブレーキ装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決するためのものとして、本発明は、電気式アクチュエータを駆動源とする電動ブレーキの作動により車輪の回転を制動する車両用電動ブレーキ装置であって、車両が停止すべき位置を検知する停車位置検知手段と、自車速度を検知する車速検知手段と、上記停車位置検知手段により自車両の周りに停車位置が検知され、かつ上記車速検知手段により自車両が停止状態にあることが検知された場合に、上記電気式アクチュエータを駆動して上記電動ブレーキを作動させる制御手段とを備えることを特徴とするものである(請求項1)。
【0006】
本発明によれば、車両が停止すべき位置において自車両が停止状態にあることが検知された場合に、制御手段による制御に基づき自動的に電動ブレーキが作動するように構成されているため、例えば乗員が誤って電動ブレーキの作動を解除するような操作を行った場合でも、この電動ブレーキによる制動力が適切に維持され、自車両が停車位置から不用意に動き出してしまうこと等を効果的に防止することができる。この結果、車両の不用意な挙動に起因した事故の発生等を効果的に防止でき、車両の安全性をより向上させることができる等の利点がある。
【0007】
上記停車位置検知手段は、例えば、道路地図上における自車両の位置を検知するナビゲーションユニットであることが好ましい(請求項2)。
【0008】
この構成によれば、ナビゲーションユニットという既存の設備を利用して上記停車位置を簡単かつ効率よく検知できるとともに、その結果に基づいて適正に電動ブレーキを作動させることができるという利点がある。
【0009】
上記停車位置検知手段は、路面上に付された停止線を検知する停止線検知手段であることも、また好ましい(請求項3)。
【0010】
この構成によれば、停止線の位置に基づいたより正確な停車位置を検知することができ、その結果に基づいてより適正なブレーキ制御を行えるという利点がある。
【0011】
また、上記制御手段は、上記停車位置検知手段により自車両の進行方向前方に停車位置が検知され、かつ上記車速検知手段により自車両の走行速度が所定値以上であることが検知された場合に、上記電動ブレーキを作動させることが好ましい(請求項4)。
【0012】
この構成によれば、例えば停車位置を見落とした乗員がブレーキ操作を忘れたりその操作が遅れたりしたような場合でも、停車位置の手前で適正に電動ブレーキを作動させて自車両を減速させることができ、車両の安全性をより効果的に向上させることができるという利点がある。
【0013】
本発明においては、上記制御手段が電動ブレーキを作動させる条件が成立したときに乗員に対し所定の警告を行う警報手段をさらに備えることが好ましい(請求項5)。
【0014】
この構成によれば、警報手段の作動によって乗員に注意を促すことができるとともに、何らの警告を行うことなく電動ブレーキを作動させた場合と異なり、走行中に電動ブレーキが突然作動することによる乗員の違和感を効果的に緩和できるという利点がある。
【0015】
また、上記制御手段は、自車両がメンテナンス中であることが確認されると上記電動ブレーキの作動を停止させることが好ましい(請求項6)。
【0016】
この構成によれば、自車両のメンテナンス中に電動ブレーキが不必要に作動してメンテナンス作業に支障が生じること等を効果的に防止できるという利点がある。
【発明の効果】
【0017】
以上説明したように、本発明の車両用電動ブレーキ装置によれば、自車両の位置や速度に応じて適切に制動力を発生させることができ、車両の安全性を効果的に向上させることができる。
【発明を実施するための最良の形態】
【0018】
<実施形態1>
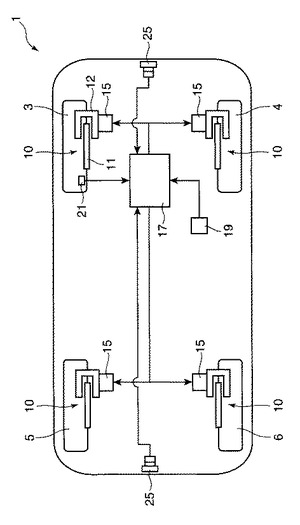
図1および図2は、本発明の第1実施形態にかかる車両用電動ブレーキ装置1の概略構成を示す図である。これらの図に示される車両用電動ブレーキ装置1は、車両の四輪(前輪3,4および後輪5,6)の回転をそれぞれ制動する4つの電動ブレーキ10と、これら各電動ブレーキ10をそれぞれ駆動するための電気的駆動源として設けられた4つのモータ15(本発明にかかる電気式アクチュエータに相当)と、乗員(運転者)により踏み込み操作されるブレーキペダル19と、このブレーキペダル19の操作状態(ペダルの踏み込み量や踏み込み速度)等に応じて上記各モータ15による電動ブレーキ10の駆動を制御する制御ユニット17(本発明にかかる制御手段に相当)とを備えている。
【0019】
上記電動ブレーキ10は、車輪3〜6と一体に回転する円盤状のロータ11と、このロータ11に対し左右からパッド材(摩擦材)を押し付けることにより所定の摩擦抵抗を発生させるキャリパー12とを有している。このうち、キャリパー12には、上記パッド材をロータ11に対し押し付ける図外のピストンが内蔵されており、このピストンが上記モータ15の駆動力に応じて進退駆動されることにより、上記パッド材およびロータ11間の摩擦抵抗が制御されて上記車輪3〜6に対し所定の制動力が付与されるようになっている。
【0020】
上記モータ15は、例えばDCモータ等からなる電動モータであり、図外のバッテリー等の電源供給部から電力の供給を受けて所定の駆動力を得、これに応じて上記電動ブレーキ10を作動させるように構成されている。
【0021】
上記ブレーキペダル19には、その踏み込み量や踏み込み速度を検知するペダルセンサ19aが内蔵されている。そして、このペダルセンサ19aにより検知されたペダル踏み込み量や踏み込み速度に応じた適切な制動力が上記各車輪3〜6に付与されるように、上記各モータ15の駆動力が上記制御ユニット17によって随時制御されるようになっている。
【0022】
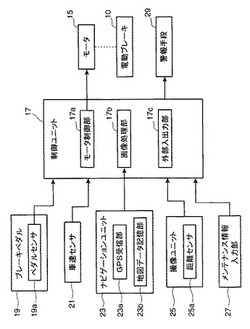
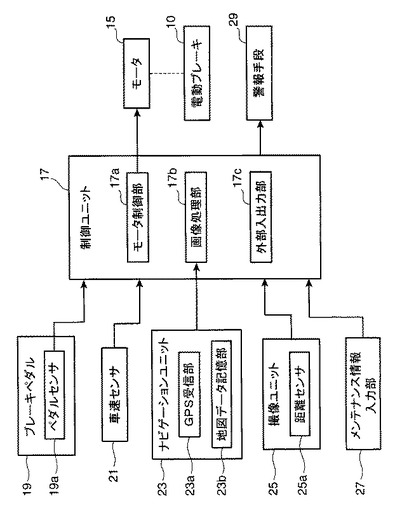
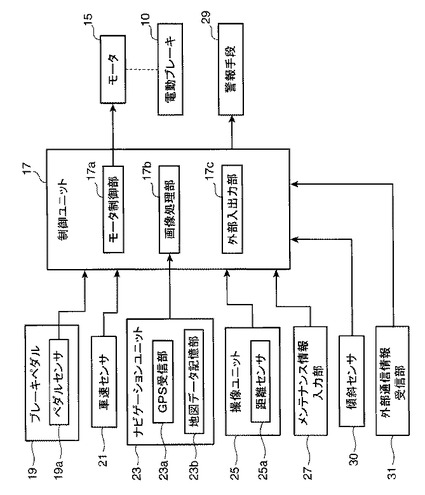
上記制御ユニット17は、周知のCPUや各種メモリ等からなるものであり、その機能要素として、上記モータ15の駆動を制御するモータ制御部17a、後述する撮像ユニット25から入力される画像データに対し所定の画像処理を行う画像処理部17b、および、各種センサや装置類から入力される信号の受け付け等を行う外部入出力部17c等を有している。
【0023】
また、上記制御ユニット17には、上記ペダルセンサ19aの他、自車両の走行速度を検知する車速センサ21と、自車両の現在位置や目的地までの経路等の各種情報を乗員に提供するナビゲーションユニット23と、自車両の前方および後方を撮像する一対の撮像ユニット25と、車両整備時に作業者によって入力操作されるメンテナンス情報入力部27とがそれぞれ接続されており、これら各種センサや装置類から上記制御ユニット17に対し必要な情報が随時入力されるようになっている。
【0024】
上記ナビゲーションユニット23は、例えばGPS衛星からの電波を受信するGPS受信部23aと、道路地図を記憶する地図データ記憶部23bとを有しており、上記GPS受信部23aにより受信された位置特定用の各種情報に基づいて、上記道路地図上での自車両の位置を検知し、その結果を図外のモニタ等に表示するように構成されている。
【0025】
上記撮像ユニット25は、例えばCCDカメラ等からなるものであり、自車両の前方または後方の画像を取り込んでその画像データを上記制御ユニット17の画像処理部17bに送信するように構成されている。また、この撮像ユニット25には、赤外線等を用いた距離センサ25aが内蔵されており、この距離センサ25aにより、撮像した対象物と自車両との距離が測定されるようになっている。
【0026】
上記メンテナンス情報入力部27は、自車両がメンテナンス中であることを上記制御ユニット17に認識させるためのものであり、例えばエンジンルーム等の車両の所定箇所に配設されている。そして、車両の整備作業(例えば車検整備や故障修理等)を行う際に作業者がこのメンテナンス情報入力部27に対し所定の入力操作を行うことにより、自車両がメンテナンス中である旨の情報が上記メンテナンス情報入力部27から上記制御ユニット17に送信されるようになっている。
【0027】
次に、上記制御ユニット17による制御動作について具体的に説明する。この制御ユニット17は、通常時に上記ペダルセンサ19aから入力される検出信号に応じて上記モータ15による電動ブレーキ10の駆動を制御する機能の他、以下に説明するような機能を有している。
【0028】
(1)停車維持機能
上記制御ユニット17は、車両が停止すべき位置(以下、このような位置を停車位置という)もしくはその近傍に自車両がいることが確認されるとともに、自車両が停止状態にある(つまり自車両の速度がゼロである)ことが上記車速センサ21により検知され、かつアクセルペダルが非操作状態にあることが図外のアクセルセンサ等により検知された場合に、自車両の停止状態を維持すべく、乗員によるブレーキペダル19の踏み込み操作の有無にかかわらず、上記モータ15を駆動して電動ブレーキ10を作動させ、上記車輪3〜6に対し所定の制動力を発生させるように構成されている。これにより、自車両が停車位置に停止している状態で乗員が誤ってブレーキペダル19の踏み込み力を解除したとしても、車両が不用意に動き出すことが防止され、車両の安全性が良好に確保される。
【0029】
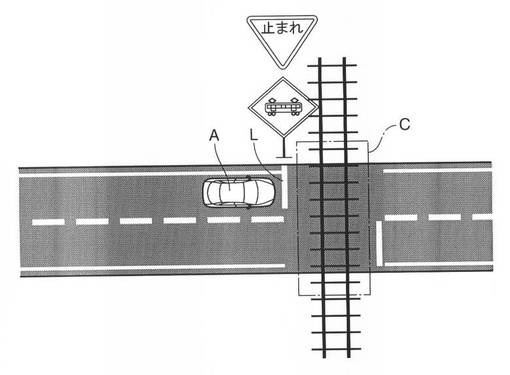
上記停車位置の認識は、上記ナビゲーションユニット23により検知される自車両の道路地図上での位置、および、上記撮像ユニット25により撮像される自車両の周囲の映像等に基づき行われる。例えば、日本の交通法規上では図3に示される踏切Cの手前で車両は停止しなければならないが、このような踏切Cの手前に自車両Aが位置することは、道路地図上での自車両Aの位置を検知可能な上記ナビゲーションユニット23により少なくとも大まかに検知することができる。さらに、自車両Aが踏切Cの手前にいることは、より正確には、当該踏切Cの手前の路面上に付された停止線Lが自車両Aの前方に存在することを上記撮像ユニット25等で認識することにより検知することができる。なおこの場合において、上記停止線Lの存在は、上記撮像ユニット25により撮像された車両前方等の映像を画像処理部17bで画像処理することにより認識することができる。以上のことから、当実施形態では、車両が停止すべき位置を検知する停車位置検知手段が、道路地図上における自車両Aの位置を検知する上記ナビゲーションユニット23と、路面上に付された停止線Lを認識する撮像ユニット25および画像処理部17bからなる停止線検知手段とにより構成されている。
【0030】
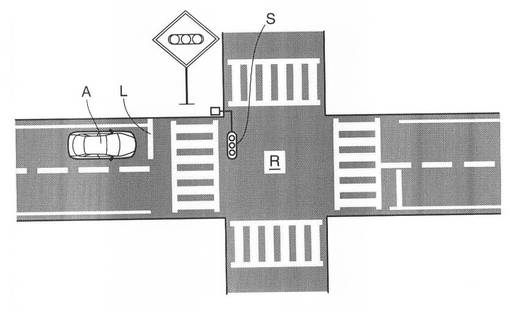
図4には、上記停車位置に関する別の例として、交差点Rの手前に自車両Aが位置した状態が示されている。この図4の例においては、自車両Aが交差点Rの近傍に位置することが上記ナビゲーションユニット23により検知されるとともに、上記交差点Rの手前に付された停止線Lが撮像ユニット25および画像処理部17bにより検知され、かつ自車両Aが停止状態にあることが車速センサ21により検知されるのに応じて、上記制御ユニット17がモータ15を駆動して電動ブレーキ10を作動させる。ただしこの場合には、交差点R内の信号機Sの色が青であるか否かが上記撮像ユニット25および画像処理部17bによって合わせて検知され、その結果に基づいて上記電動ブレーキ10の作動の有無が決定される。すなわち、信号機Sの色が青であれば車両は停止状態を維持する必要がないので、このような場合には、電動ブレーキ10を自動的に作動させる上記のような制御は行われず、電動ブレーキ10の作動の有無は乗員の運転操作に委ねられる。
【0031】
なお、以上説明したような制御ユニット17による停車維持機能は、乗員がアクセルペダルを踏み込む等により車両を発進させる旨の明確な意志表示を行った場合にはその時点で直ちに解除される。
【0032】
(2)自動減速機能
上記制御ユニット17は、上記ナビゲーションユニット23や撮像ユニット25等からなる停車位置検知手段により自車両Aの進行方向前方に停車位置が検知され、かつ上記車速センサ21により自車両Aの速度が所定値以上であることがあることが検知された場合にも、上記と同様に、乗員によるブレーキ操作の有無にかかわらず電動ブレーキ10を作動させる。そして、このように電動ブレーキ10が作動して自車両Aが強制的に減速させられることにより、停車位置(例えば図3および図4に示した踏切Cや交差点Rの手前)で停止すべきところを自車両Aが誤って通過してしまうことが防止されるようになっている。
【0033】
また、上記のようにして電動ブレーキ10を作動させるのに合わせて、制御ユニット17は、図2に示される警報手段29を作動させて乗員に対し所定の警告を行うように構成されている。この警報手段29は、例えば、所定の警告音を発生させる警告音発生装置や、ステアリングを振動させる振動発生装置等により構成することが可能である。
【0034】
(3)メンテナンス時のブレーキ解除機能
上記制御ユニット17は、上記メンテナンス情報入力部27からの出力信号に応じて自車両Aがメンテナンス中であることを認識した場合には、上記(1)(2)で説明したような制御、つまり、ブレーキ操作の有無にかかわらず上記電動ブレーキ10用のモータ15を駆動する制御の実行をキャンセルするように構成されている。これにより、例えばメンテナンス中に車輪3〜6を駆動するテスト等を行おうとしたときに、電動ブレーキ10が不必要に作動することが回避され、メンテナンス作業を円滑に行うことが可能になる。
【0035】
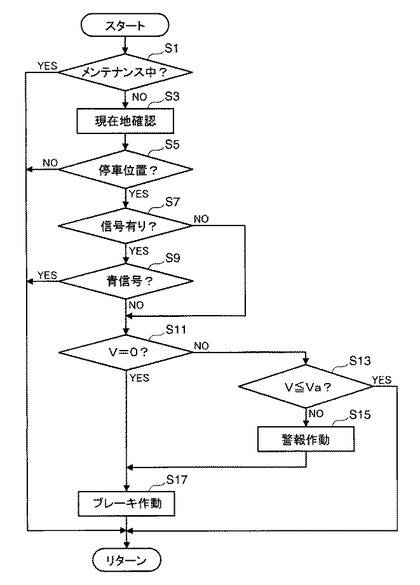
次に、以上説明したような制御ユニット17による制御動作の具体的内容を、図5に示されるフローチャートに基づき具体的に説明する。このフローチャートがスタートすると、上記制御ユニット17は、まず、自車両Aがメンテナンス中であるか否かを、上記メンテナンス情報入力部27からの出力信号の有無に応じて判定する制御を実行する(ステップS1)。そして、ここでNOと判定されて自車両Aがメンテナンス中でないこと(つまり通常の使用状態にあること)が確認された場合には、次のステップS3に移行し、自車両Aの道路地図上での位置(現在地)を、上記ナビゲーションユニット23からの情報に基づき認識する制御を実行する。一方、上記ステップS1でYESと判定されて自車両Aがメンテナンス中であることが確認された場合には、直ちにリターンされ、以下に説明するような制御動作は行われない。
【0036】
上記ステップS3で自車両Aの現在地を確認した後、制御ユニット17は、自車両Aが停車位置(例えば図3および図4に示した踏切Cや交差点Rの手前)もしくはその近傍にあるか否かを判定する制御を実行する(ステップS5)。具体的に、制御ユニット17は、上記ナビゲーションユニット17から取得した自車両Aの道路地図上での位置と、上記撮像ユニット25および画像処理部17bにより検知された停止線Lの位置とに基づいて、自車両Aから所定距離内に上記停車位置(より具体的には停止線L)が存在するか否かを判定する。なお、上記停止線Lから自車両Aまでの距離は、撮像ユニット25に内蔵された距離センサ25aにより測定することが可能である。
【0037】
上記ステップS5でYESと判定されて自車両Aから所定距離内に停車位置が存在することが確認された場合、制御ユニット17は、次のステップS7に移行して、自車両Aの進行方向前方に信号機Sが存在するか否かを判定するとともに、ここでYESと判定されて自車両Aの進行方向前方に信号機Sが存在することが確認された場合に、上記信号機Sの色が青であるか否かを判定する制御を実行する(ステップS9)。これらの各判定処理は、上記撮像ユニット25により撮像された自車両Aの進行方向前方の画像データを画像処理部17bで画像処理した結果に基づき行われる。
【0038】
さらに、上記ステップS9でNOと判定されて信号機Sの色が赤または黄であることが確認された場合、制御ユニット17は、上記車速センサ21からの検出信号に基づき自車両Aの走行速度Vがゼロ(V=0)であるか否かを判定する制御を実行する(ステップS11)。また、上記制御ユニット17は、上記ステップS7でNOと判定されて自車両Aの進行方向前方に信号機Sが存在しないことが確認された場合にも、上記と同じステップS11に移行してV=0か否かを判定する制御を実行する。なお、上記ステップS7でNOの場合(つまり信号機Sがないのに停止すべきである場合)とは、例えば、図3に示した踏切Cの手前や、信号機Sがなくかつ一旦停止すべき交差点の手前に自車両Aが位置している場合等が挙げられる。
【0039】
そして、上記ステップS11でYESと判定されてV=0であることが確認された場合、すなわち、信号機Sの色が赤または黄になっている交差点Rの手前で自車両Aが停止状態にあることが確認された場合に、制御ユニット17は、上記モータ15を駆動して電動ブレーキ10に所定の制動力を発生させる制動を実行する(ステップS17)。これにより、乗員がアクセルペダルを踏み込む等の動作を行わない限り、自車両Aは停止状態に維持されることになる。
【0040】
一方、上記ステップS11でNOと判定されて自車両Aが停止状態にないこと(つまり所定の車速で走行していること)が確認された場合には、上記自車両Aの現時点での速度Vが停止可能速度Va以下であるか否かを判定する制御を実行する(ステップS13)。なお、ここでいう停止可能速度Vaは、自車両Aが停車位置(つまり交差点Rの手前に付された停止線Lの位置)に達する前に十分な余裕をもって停止することが可能な上限の速度を指すものである。このような停止可能速度Vaは、上記距離センサ25aにより測定された自車両Aの現在位置から上記停止線Lまでの距離に基づき算出することが可能である。
【0041】
そして、上記ステップS13でNOと判定されて自車両Aの速度Vが停止可能速度Vaよりも大きいことが確認された場合、つまり、車速Vがこのまま維持されると自車両Aが上記停車位置までに安全に停止することが不可能になると予想される場合に、制御ユニット17は、上記警報手段29を作動させて乗員に警告を発するとともに(ステップS15)、上記ステップS17に移行して電動ブレーキ10を作動させ、自車両Aを減速させる制御を実行する。
【0042】
なお、以上説明したフローチャートにおいて、上記ステップS5でNOと判定されて自車両Aから所定範囲内に停車位置が存在しないことが確認された場合、または、上記ステップS9でYESと判定されて信号機Sの色が青であることが確認された場合、さらには、上記ステップS13でYESと判定されて車速Vが停止可能速度Va以下であることが確認された場合には、上記電動ブレーキ10を作動させる必要がないため、そのままリターンされる。
【0043】
上記のようにモータ15を駆動源とする電動ブレーキ10の作動により車輪3〜6の回転を制動する車両用電動ブレーキ装置1において、車両が停止すべき位置(停車位置)を検知するナビゲーションユニット23や撮像ユニット25等からなる停車位置検知手段と、自車速度Vを検知する車速検知手段としての車速センサ21と、上記停車位置検知手段により自車両Aの周りに停車位置が検知され、かつ上記車速センサ21により自車両Aが停止状態(V=0)にあることが検知された場合(図5のステップS11でYESの場合)に、上記モータ15を駆動して電動ブレーキ10を作動させる制御ユニット17とを設けた上記第1実施形態の構成によれば、自車両Aの位置や速度に応じて適切に制動力を発生させることができ、車両の安全性を効果的に向上させることができるという利点がある。
【0044】
すなわち、上記第1実施形態では、車両が停止すべき位置において自車両Aが停止状態にあることが検知された場合に、制御ユニット17による制御に基づき自動的に電動ブレーキ10が作動するように構成されているため、例えば乗員が誤ってブレーキペダル19の踏み込み力を解除する等により、上記電動ブレーキ10の作動を解除するような操作を行った場合でも、この電動ブレーキ10による制動力が適切に維持され、自車両Aが停車位置から不用意に動き出してしまうこと等を効果的に防止することができる。この結果、車両の不用意な挙動に起因した事故の発生等を効果的に防止でき、車両の安全性をより向上させることができるという利点がある。
【0045】
特に、自車両Aがオートマチック車である場合(つまりブレーキペダル19を離せば自動的に車両が発進するクリープ機能を備えた車両である場合)には、乗員の誤操作による車両の不用意な発進が起きる可能性が少なくないと考えられるため、このようなオートマチック車に上記構成を適用すれば、車両の安全性の向上をより効果的に図ることができる。また、交差点等で車両が比較的長い時間停止する必要がある場合等に、乗員がブレーキペダル19を踏み続けることを不要にすることにより、乗員のブレーキ操作を補助して乗員の快適性をより向上させることができるという利点もある。
【0046】
しかも、モータ15の駆動により作動する電動ブレーキ10が適用された車両に対し上記のようなブレーキ制御を行うことにより、制御上のソフトウェアをアレンジするだけの簡単な構成で、適正に電動ブレーキ10を作動させて車両の安全性を効果的に向上させることができるという利点がある。
【0047】
また、上記第1実施形態では、道路地図上での自車両Aの位置を検知するナビゲーションユニット23を用いて停車位置の検知を行うようにしたため、既存の設備を利用して上記停車位置を簡単かつ効率よく検知できるとともに、その結果に基づいて適正に電動ブレーキ10を作動させることができるという利点がある。
【0048】
さらに、上記第1実施形態では、撮像ユニット25および画像処理部17bからなる停止線検知手段により検知された停止線Lの位置に基づいて上記停車位置の検知を行うようにしたため、上記停車位置としてより正確な位置を割り出すことができ、その結果に基づいてより適正なブレーキ制御を行えるという利点がある。
【0049】
また、上記第1実施形態では、ナビゲーションユニット23や撮像ユニット25等により自車両Aの進行方向前方に停車位置が検知され、かつ上記車速センサ21により自車両Aの走行速度Vが所定値(停止可能速度Va)以上であることが検知された場合(図5のステップS13でNOの場合)に、上記制御ユニット17が電動ブレーキ10を作動させるように構成されているため、例えば停車位置を見落とした乗員がブレーキ操作を忘れたりその操作が遅れたりしたような場合でも、停車位置の手前で適正に電動ブレーキ10を作動させて自車両Aを減速させることができ、車両の安全性をより効果的に向上させることができるという利点がある。
【0050】
特に、上記第1実施形態のように、制御ユニット17が電動ブレーキ10を作動させる条件が成立したとき(つまり停車位置が検知されたときの走行速度Vが停止可能速度Vaよりも大きかった場合)に、警報手段29によって乗員に対し所定の警告を行うようにした場合には、その警告によって乗員に注意を促すことができるとともに、何らの警告を行うことなく電動ブレーキ10を作動させた場合と異なり、走行中に電動ブレーキ10が突然作動することによる乗員の違和感を効果的に緩和できるという利点がある。
【0051】
また、上記第1実施形態では、自車両Aがメンテナンス中であることがメンテナンス情報入力部27からの出力信号の有無に基づき確認されると、上記制御ユニット17が電動ブレーキ10の作動を停止させるように構成されているため、自車両Aのメンテナンス中に電動ブレーキ10が不必要に作動してメンテナンス作業に支障が生じること等を効果的に防止できるという利点がある。
【0052】
なお、上記第1実施形態では、車両が停止すべき停車位置が踏切Cや交差点Rの手前である場合を例に挙げて説明を行ったが、停車位置が検知されるのに応じて電動ブレーキ10を作動させる本発明の制御内容は、上記のような踏切Cや交差点Rの手前に自車両Aが位置している場合に限らず適用可能である。例えば、自車両Aが駐車場内にいることがナビゲーションユニット23により検知され、かつ撮像ユニット25および画像処理部17bにより駐車場内の停止線や車止め等が検知された場合には、これらの情報に基づき自車両Aが停止すべき位置(停車位置)を認識して必要に応じ電動ブレーキ10を作動させることにより、乗員による駐車動作を効果的に補助することができる。
【0053】
また、上記第1実施形態では、道路地図上での自車両Aの位置をナビゲーションユニット23で検知するとともに、路面上の停止線Lを撮像ユニット25および画像処理部17bで検知することにより、車両が停止すべき位置(停車位置)を認識するようにしたが、例えばナビゲーションユニット23の位置検出精度が十分に正確なものである場合には、このナビゲーションユニット23のみによって停車位置を検知するようにしてもよい。また、停止線Lを撮像することによって停車位置を検知する上記構成に代えて、信号機Sや各種道路標識等を撮像することによって停車位置を検知するようにしてもよい。
【0054】
また、上記第1実施形態では、電動ブレーキ10の駆動源としてDCモータ等からなるモータ15を設けたが、このような電動ブレーキ10の駆動源は、電力等の供給を受けて電動ブレーキ10を作動させ得るものであれば上記モータ15に限らず、各種電気式アクチュエータ(つまり電力の供給もしくは何らかの電気的信号の入力を受けることで作動する各種アクチュエータ)を用いることが可能である。
【0055】
<実施形態2>
図6は、本発明の第2実施形態を説明するためのブロック図である。この図6の例では、傾斜センサ30および外部通信情報受信部31が制御ユニット17に接続されている。なお、これ以外の構成は、上記第1実施形態と同様である。
【0056】
上記傾斜センサ30は、自車両Aの傾き等に基づいて路面が傾斜していることを検知するものである。
【0057】
上記外部通信情報受信部31は、例えば道路上に設置された何らかの情報発信装置から発せされる情報を受信するものである。すなわち、将来的に、車両の運行にかかわる各種情報(例えば交差点R内の信号機Sの表示が何色であるか等の情報)を所定の情報発信装置により道路上の車両に提供することが考えられるため、このような情報を受信するためのものとして、上記外部通信情報受信部31が設けられている。
【0058】
以上説明した第2実施形態の構成によれば、外部通信情報受信部31で受信された各種情報に基づき自車両Aが停止すべきであるか否か等を判断して、その判断結果に基づき電動ブレーキ10を作動させることが可能である。また、傾斜センサ30により路面が傾斜していることが確認された場合に、自車両Aがその傾斜によって勝手に動き出さないように電動ブレーキ10を作動させることも可能である。そして、このように外部からの通信情報や路面の傾斜状態等に基づき電動ブレーキ10を作動させることで、車両の安全性の向上をより効果的に図ることができる。
【図面の簡単な説明】
【0059】
【図1】本発明の第1実施形態にかかる車両用電動ブレーキ装置が適用された車両の概略構成を示す図である。
【図2】上記電動ブレーキ装置の制御系を示すブロック図である。
【図3】踏切の手前に自車両が位置した状態を示す説明図である。
【図4】交差点の手前に自車両が位置した状態を示す説明図である。
【図5】制御ユニットが行う制御動作の具体的内容を示すフローチャートである。
【図6】本発明の第2実施形態を説明するためのブロック図である。
【符号の説明】
【0060】
1 車両用電動ブレーキ装置
3〜6 車輪
10 電動ブレーキ
15 モータ(電気式アクチュエータ)
17 制御ユニット(制御手段)
17b 画像処理部(停止線検知手段)
21 車速センサ(車速検知手段)
23 ナビゲーションユニット
25 撮像ユニット(停止線検知手段)
29 警報手段
A 自車両
L 停止線
【技術分野】
【0001】
本発明は、電気式アクチュエータを駆動源とする電動ブレーキの作動により車輪の回転を制動する車両用電動ブレーキ装置に関する。
【背景技術】
【0002】
従来から、車輪の回転を制動するブレーキ装置として、電動モータ等からなる電気式アクチュエータを駆動源とした電動ブレーキ装置が知られている。例えば、下記特許文献1には、車両の四輪にそれぞれ設けられた電動ブレーキと、これら各電動ブレーキを個別に駆動する電動モータと、乗員により踏み込み操作されるブレーキペダルと、このブレーキペダルの操作に応じて上記各電動モータを駆動することにより、上記電動ブレーキの作動を制御するモータ制御装置とを備えた車両用電動ブレーキ装置が開示されている。
【特許文献1】特開2000−16258号公報
【発明の開示】
【発明が解決しようとする課題】
【0003】
ところで、近年では、車両の周囲を撮像する各種カメラや、地図データ等を記憶するナビゲーションユニットなどの様々な機器が車両に搭載されている。したがって、これらの機器から得られる情報を利用して上記電動ブレーキの作動を適切に制御することができれば、車両の安全性等をより向上させることができるが、上記特許文献1には、このような要求に応える技術についての開示は特になされていなかった。
【0004】
本発明は、上記のような事情に鑑みてなされたものであり、自車両の位置や速度に応じて適切に制動力を発生させることにより、車両の安全性を効果的に向上させることが可能な車両電動ブレーキ装置を提供することを目的とする。
【課題を解決するための手段】
【0005】
上記課題を解決するためのものとして、本発明は、電気式アクチュエータを駆動源とする電動ブレーキの作動により車輪の回転を制動する車両用電動ブレーキ装置であって、車両が停止すべき位置を検知する停車位置検知手段と、自車速度を検知する車速検知手段と、上記停車位置検知手段により自車両の周りに停車位置が検知され、かつ上記車速検知手段により自車両が停止状態にあることが検知された場合に、上記電気式アクチュエータを駆動して上記電動ブレーキを作動させる制御手段とを備えることを特徴とするものである(請求項1)。
【0006】
本発明によれば、車両が停止すべき位置において自車両が停止状態にあることが検知された場合に、制御手段による制御に基づき自動的に電動ブレーキが作動するように構成されているため、例えば乗員が誤って電動ブレーキの作動を解除するような操作を行った場合でも、この電動ブレーキによる制動力が適切に維持され、自車両が停車位置から不用意に動き出してしまうこと等を効果的に防止することができる。この結果、車両の不用意な挙動に起因した事故の発生等を効果的に防止でき、車両の安全性をより向上させることができる等の利点がある。
【0007】
上記停車位置検知手段は、例えば、道路地図上における自車両の位置を検知するナビゲーションユニットであることが好ましい(請求項2)。
【0008】
この構成によれば、ナビゲーションユニットという既存の設備を利用して上記停車位置を簡単かつ効率よく検知できるとともに、その結果に基づいて適正に電動ブレーキを作動させることができるという利点がある。
【0009】
上記停車位置検知手段は、路面上に付された停止線を検知する停止線検知手段であることも、また好ましい(請求項3)。
【0010】
この構成によれば、停止線の位置に基づいたより正確な停車位置を検知することができ、その結果に基づいてより適正なブレーキ制御を行えるという利点がある。
【0011】
また、上記制御手段は、上記停車位置検知手段により自車両の進行方向前方に停車位置が検知され、かつ上記車速検知手段により自車両の走行速度が所定値以上であることが検知された場合に、上記電動ブレーキを作動させることが好ましい(請求項4)。
【0012】
この構成によれば、例えば停車位置を見落とした乗員がブレーキ操作を忘れたりその操作が遅れたりしたような場合でも、停車位置の手前で適正に電動ブレーキを作動させて自車両を減速させることができ、車両の安全性をより効果的に向上させることができるという利点がある。
【0013】
本発明においては、上記制御手段が電動ブレーキを作動させる条件が成立したときに乗員に対し所定の警告を行う警報手段をさらに備えることが好ましい(請求項5)。
【0014】
この構成によれば、警報手段の作動によって乗員に注意を促すことができるとともに、何らの警告を行うことなく電動ブレーキを作動させた場合と異なり、走行中に電動ブレーキが突然作動することによる乗員の違和感を効果的に緩和できるという利点がある。
【0015】
また、上記制御手段は、自車両がメンテナンス中であることが確認されると上記電動ブレーキの作動を停止させることが好ましい(請求項6)。
【0016】
この構成によれば、自車両のメンテナンス中に電動ブレーキが不必要に作動してメンテナンス作業に支障が生じること等を効果的に防止できるという利点がある。
【発明の効果】
【0017】
以上説明したように、本発明の車両用電動ブレーキ装置によれば、自車両の位置や速度に応じて適切に制動力を発生させることができ、車両の安全性を効果的に向上させることができる。
【発明を実施するための最良の形態】
【0018】
<実施形態1>
図1および図2は、本発明の第1実施形態にかかる車両用電動ブレーキ装置1の概略構成を示す図である。これらの図に示される車両用電動ブレーキ装置1は、車両の四輪(前輪3,4および後輪5,6)の回転をそれぞれ制動する4つの電動ブレーキ10と、これら各電動ブレーキ10をそれぞれ駆動するための電気的駆動源として設けられた4つのモータ15(本発明にかかる電気式アクチュエータに相当)と、乗員(運転者)により踏み込み操作されるブレーキペダル19と、このブレーキペダル19の操作状態(ペダルの踏み込み量や踏み込み速度)等に応じて上記各モータ15による電動ブレーキ10の駆動を制御する制御ユニット17(本発明にかかる制御手段に相当)とを備えている。
【0019】
上記電動ブレーキ10は、車輪3〜6と一体に回転する円盤状のロータ11と、このロータ11に対し左右からパッド材(摩擦材)を押し付けることにより所定の摩擦抵抗を発生させるキャリパー12とを有している。このうち、キャリパー12には、上記パッド材をロータ11に対し押し付ける図外のピストンが内蔵されており、このピストンが上記モータ15の駆動力に応じて進退駆動されることにより、上記パッド材およびロータ11間の摩擦抵抗が制御されて上記車輪3〜6に対し所定の制動力が付与されるようになっている。
【0020】
上記モータ15は、例えばDCモータ等からなる電動モータであり、図外のバッテリー等の電源供給部から電力の供給を受けて所定の駆動力を得、これに応じて上記電動ブレーキ10を作動させるように構成されている。
【0021】
上記ブレーキペダル19には、その踏み込み量や踏み込み速度を検知するペダルセンサ19aが内蔵されている。そして、このペダルセンサ19aにより検知されたペダル踏み込み量や踏み込み速度に応じた適切な制動力が上記各車輪3〜6に付与されるように、上記各モータ15の駆動力が上記制御ユニット17によって随時制御されるようになっている。
【0022】
上記制御ユニット17は、周知のCPUや各種メモリ等からなるものであり、その機能要素として、上記モータ15の駆動を制御するモータ制御部17a、後述する撮像ユニット25から入力される画像データに対し所定の画像処理を行う画像処理部17b、および、各種センサや装置類から入力される信号の受け付け等を行う外部入出力部17c等を有している。
【0023】
また、上記制御ユニット17には、上記ペダルセンサ19aの他、自車両の走行速度を検知する車速センサ21と、自車両の現在位置や目的地までの経路等の各種情報を乗員に提供するナビゲーションユニット23と、自車両の前方および後方を撮像する一対の撮像ユニット25と、車両整備時に作業者によって入力操作されるメンテナンス情報入力部27とがそれぞれ接続されており、これら各種センサや装置類から上記制御ユニット17に対し必要な情報が随時入力されるようになっている。
【0024】
上記ナビゲーションユニット23は、例えばGPS衛星からの電波を受信するGPS受信部23aと、道路地図を記憶する地図データ記憶部23bとを有しており、上記GPS受信部23aにより受信された位置特定用の各種情報に基づいて、上記道路地図上での自車両の位置を検知し、その結果を図外のモニタ等に表示するように構成されている。
【0025】
上記撮像ユニット25は、例えばCCDカメラ等からなるものであり、自車両の前方または後方の画像を取り込んでその画像データを上記制御ユニット17の画像処理部17bに送信するように構成されている。また、この撮像ユニット25には、赤外線等を用いた距離センサ25aが内蔵されており、この距離センサ25aにより、撮像した対象物と自車両との距離が測定されるようになっている。
【0026】
上記メンテナンス情報入力部27は、自車両がメンテナンス中であることを上記制御ユニット17に認識させるためのものであり、例えばエンジンルーム等の車両の所定箇所に配設されている。そして、車両の整備作業(例えば車検整備や故障修理等)を行う際に作業者がこのメンテナンス情報入力部27に対し所定の入力操作を行うことにより、自車両がメンテナンス中である旨の情報が上記メンテナンス情報入力部27から上記制御ユニット17に送信されるようになっている。
【0027】
次に、上記制御ユニット17による制御動作について具体的に説明する。この制御ユニット17は、通常時に上記ペダルセンサ19aから入力される検出信号に応じて上記モータ15による電動ブレーキ10の駆動を制御する機能の他、以下に説明するような機能を有している。
【0028】
(1)停車維持機能
上記制御ユニット17は、車両が停止すべき位置(以下、このような位置を停車位置という)もしくはその近傍に自車両がいることが確認されるとともに、自車両が停止状態にある(つまり自車両の速度がゼロである)ことが上記車速センサ21により検知され、かつアクセルペダルが非操作状態にあることが図外のアクセルセンサ等により検知された場合に、自車両の停止状態を維持すべく、乗員によるブレーキペダル19の踏み込み操作の有無にかかわらず、上記モータ15を駆動して電動ブレーキ10を作動させ、上記車輪3〜6に対し所定の制動力を発生させるように構成されている。これにより、自車両が停車位置に停止している状態で乗員が誤ってブレーキペダル19の踏み込み力を解除したとしても、車両が不用意に動き出すことが防止され、車両の安全性が良好に確保される。
【0029】
上記停車位置の認識は、上記ナビゲーションユニット23により検知される自車両の道路地図上での位置、および、上記撮像ユニット25により撮像される自車両の周囲の映像等に基づき行われる。例えば、日本の交通法規上では図3に示される踏切Cの手前で車両は停止しなければならないが、このような踏切Cの手前に自車両Aが位置することは、道路地図上での自車両Aの位置を検知可能な上記ナビゲーションユニット23により少なくとも大まかに検知することができる。さらに、自車両Aが踏切Cの手前にいることは、より正確には、当該踏切Cの手前の路面上に付された停止線Lが自車両Aの前方に存在することを上記撮像ユニット25等で認識することにより検知することができる。なおこの場合において、上記停止線Lの存在は、上記撮像ユニット25により撮像された車両前方等の映像を画像処理部17bで画像処理することにより認識することができる。以上のことから、当実施形態では、車両が停止すべき位置を検知する停車位置検知手段が、道路地図上における自車両Aの位置を検知する上記ナビゲーションユニット23と、路面上に付された停止線Lを認識する撮像ユニット25および画像処理部17bからなる停止線検知手段とにより構成されている。
【0030】
図4には、上記停車位置に関する別の例として、交差点Rの手前に自車両Aが位置した状態が示されている。この図4の例においては、自車両Aが交差点Rの近傍に位置することが上記ナビゲーションユニット23により検知されるとともに、上記交差点Rの手前に付された停止線Lが撮像ユニット25および画像処理部17bにより検知され、かつ自車両Aが停止状態にあることが車速センサ21により検知されるのに応じて、上記制御ユニット17がモータ15を駆動して電動ブレーキ10を作動させる。ただしこの場合には、交差点R内の信号機Sの色が青であるか否かが上記撮像ユニット25および画像処理部17bによって合わせて検知され、その結果に基づいて上記電動ブレーキ10の作動の有無が決定される。すなわち、信号機Sの色が青であれば車両は停止状態を維持する必要がないので、このような場合には、電動ブレーキ10を自動的に作動させる上記のような制御は行われず、電動ブレーキ10の作動の有無は乗員の運転操作に委ねられる。
【0031】
なお、以上説明したような制御ユニット17による停車維持機能は、乗員がアクセルペダルを踏み込む等により車両を発進させる旨の明確な意志表示を行った場合にはその時点で直ちに解除される。
【0032】
(2)自動減速機能
上記制御ユニット17は、上記ナビゲーションユニット23や撮像ユニット25等からなる停車位置検知手段により自車両Aの進行方向前方に停車位置が検知され、かつ上記車速センサ21により自車両Aの速度が所定値以上であることがあることが検知された場合にも、上記と同様に、乗員によるブレーキ操作の有無にかかわらず電動ブレーキ10を作動させる。そして、このように電動ブレーキ10が作動して自車両Aが強制的に減速させられることにより、停車位置(例えば図3および図4に示した踏切Cや交差点Rの手前)で停止すべきところを自車両Aが誤って通過してしまうことが防止されるようになっている。
【0033】
また、上記のようにして電動ブレーキ10を作動させるのに合わせて、制御ユニット17は、図2に示される警報手段29を作動させて乗員に対し所定の警告を行うように構成されている。この警報手段29は、例えば、所定の警告音を発生させる警告音発生装置や、ステアリングを振動させる振動発生装置等により構成することが可能である。
【0034】
(3)メンテナンス時のブレーキ解除機能
上記制御ユニット17は、上記メンテナンス情報入力部27からの出力信号に応じて自車両Aがメンテナンス中であることを認識した場合には、上記(1)(2)で説明したような制御、つまり、ブレーキ操作の有無にかかわらず上記電動ブレーキ10用のモータ15を駆動する制御の実行をキャンセルするように構成されている。これにより、例えばメンテナンス中に車輪3〜6を駆動するテスト等を行おうとしたときに、電動ブレーキ10が不必要に作動することが回避され、メンテナンス作業を円滑に行うことが可能になる。
【0035】
次に、以上説明したような制御ユニット17による制御動作の具体的内容を、図5に示されるフローチャートに基づき具体的に説明する。このフローチャートがスタートすると、上記制御ユニット17は、まず、自車両Aがメンテナンス中であるか否かを、上記メンテナンス情報入力部27からの出力信号の有無に応じて判定する制御を実行する(ステップS1)。そして、ここでNOと判定されて自車両Aがメンテナンス中でないこと(つまり通常の使用状態にあること)が確認された場合には、次のステップS3に移行し、自車両Aの道路地図上での位置(現在地)を、上記ナビゲーションユニット23からの情報に基づき認識する制御を実行する。一方、上記ステップS1でYESと判定されて自車両Aがメンテナンス中であることが確認された場合には、直ちにリターンされ、以下に説明するような制御動作は行われない。
【0036】
上記ステップS3で自車両Aの現在地を確認した後、制御ユニット17は、自車両Aが停車位置(例えば図3および図4に示した踏切Cや交差点Rの手前)もしくはその近傍にあるか否かを判定する制御を実行する(ステップS5)。具体的に、制御ユニット17は、上記ナビゲーションユニット17から取得した自車両Aの道路地図上での位置と、上記撮像ユニット25および画像処理部17bにより検知された停止線Lの位置とに基づいて、自車両Aから所定距離内に上記停車位置(より具体的には停止線L)が存在するか否かを判定する。なお、上記停止線Lから自車両Aまでの距離は、撮像ユニット25に内蔵された距離センサ25aにより測定することが可能である。
【0037】
上記ステップS5でYESと判定されて自車両Aから所定距離内に停車位置が存在することが確認された場合、制御ユニット17は、次のステップS7に移行して、自車両Aの進行方向前方に信号機Sが存在するか否かを判定するとともに、ここでYESと判定されて自車両Aの進行方向前方に信号機Sが存在することが確認された場合に、上記信号機Sの色が青であるか否かを判定する制御を実行する(ステップS9)。これらの各判定処理は、上記撮像ユニット25により撮像された自車両Aの進行方向前方の画像データを画像処理部17bで画像処理した結果に基づき行われる。
【0038】
さらに、上記ステップS9でNOと判定されて信号機Sの色が赤または黄であることが確認された場合、制御ユニット17は、上記車速センサ21からの検出信号に基づき自車両Aの走行速度Vがゼロ(V=0)であるか否かを判定する制御を実行する(ステップS11)。また、上記制御ユニット17は、上記ステップS7でNOと判定されて自車両Aの進行方向前方に信号機Sが存在しないことが確認された場合にも、上記と同じステップS11に移行してV=0か否かを判定する制御を実行する。なお、上記ステップS7でNOの場合(つまり信号機Sがないのに停止すべきである場合)とは、例えば、図3に示した踏切Cの手前や、信号機Sがなくかつ一旦停止すべき交差点の手前に自車両Aが位置している場合等が挙げられる。
【0039】
そして、上記ステップS11でYESと判定されてV=0であることが確認された場合、すなわち、信号機Sの色が赤または黄になっている交差点Rの手前で自車両Aが停止状態にあることが確認された場合に、制御ユニット17は、上記モータ15を駆動して電動ブレーキ10に所定の制動力を発生させる制動を実行する(ステップS17)。これにより、乗員がアクセルペダルを踏み込む等の動作を行わない限り、自車両Aは停止状態に維持されることになる。
【0040】
一方、上記ステップS11でNOと判定されて自車両Aが停止状態にないこと(つまり所定の車速で走行していること)が確認された場合には、上記自車両Aの現時点での速度Vが停止可能速度Va以下であるか否かを判定する制御を実行する(ステップS13)。なお、ここでいう停止可能速度Vaは、自車両Aが停車位置(つまり交差点Rの手前に付された停止線Lの位置)に達する前に十分な余裕をもって停止することが可能な上限の速度を指すものである。このような停止可能速度Vaは、上記距離センサ25aにより測定された自車両Aの現在位置から上記停止線Lまでの距離に基づき算出することが可能である。
【0041】
そして、上記ステップS13でNOと判定されて自車両Aの速度Vが停止可能速度Vaよりも大きいことが確認された場合、つまり、車速Vがこのまま維持されると自車両Aが上記停車位置までに安全に停止することが不可能になると予想される場合に、制御ユニット17は、上記警報手段29を作動させて乗員に警告を発するとともに(ステップS15)、上記ステップS17に移行して電動ブレーキ10を作動させ、自車両Aを減速させる制御を実行する。
【0042】
なお、以上説明したフローチャートにおいて、上記ステップS5でNOと判定されて自車両Aから所定範囲内に停車位置が存在しないことが確認された場合、または、上記ステップS9でYESと判定されて信号機Sの色が青であることが確認された場合、さらには、上記ステップS13でYESと判定されて車速Vが停止可能速度Va以下であることが確認された場合には、上記電動ブレーキ10を作動させる必要がないため、そのままリターンされる。
【0043】
上記のようにモータ15を駆動源とする電動ブレーキ10の作動により車輪3〜6の回転を制動する車両用電動ブレーキ装置1において、車両が停止すべき位置(停車位置)を検知するナビゲーションユニット23や撮像ユニット25等からなる停車位置検知手段と、自車速度Vを検知する車速検知手段としての車速センサ21と、上記停車位置検知手段により自車両Aの周りに停車位置が検知され、かつ上記車速センサ21により自車両Aが停止状態(V=0)にあることが検知された場合(図5のステップS11でYESの場合)に、上記モータ15を駆動して電動ブレーキ10を作動させる制御ユニット17とを設けた上記第1実施形態の構成によれば、自車両Aの位置や速度に応じて適切に制動力を発生させることができ、車両の安全性を効果的に向上させることができるという利点がある。
【0044】
すなわち、上記第1実施形態では、車両が停止すべき位置において自車両Aが停止状態にあることが検知された場合に、制御ユニット17による制御に基づき自動的に電動ブレーキ10が作動するように構成されているため、例えば乗員が誤ってブレーキペダル19の踏み込み力を解除する等により、上記電動ブレーキ10の作動を解除するような操作を行った場合でも、この電動ブレーキ10による制動力が適切に維持され、自車両Aが停車位置から不用意に動き出してしまうこと等を効果的に防止することができる。この結果、車両の不用意な挙動に起因した事故の発生等を効果的に防止でき、車両の安全性をより向上させることができるという利点がある。
【0045】
特に、自車両Aがオートマチック車である場合(つまりブレーキペダル19を離せば自動的に車両が発進するクリープ機能を備えた車両である場合)には、乗員の誤操作による車両の不用意な発進が起きる可能性が少なくないと考えられるため、このようなオートマチック車に上記構成を適用すれば、車両の安全性の向上をより効果的に図ることができる。また、交差点等で車両が比較的長い時間停止する必要がある場合等に、乗員がブレーキペダル19を踏み続けることを不要にすることにより、乗員のブレーキ操作を補助して乗員の快適性をより向上させることができるという利点もある。
【0046】
しかも、モータ15の駆動により作動する電動ブレーキ10が適用された車両に対し上記のようなブレーキ制御を行うことにより、制御上のソフトウェアをアレンジするだけの簡単な構成で、適正に電動ブレーキ10を作動させて車両の安全性を効果的に向上させることができるという利点がある。
【0047】
また、上記第1実施形態では、道路地図上での自車両Aの位置を検知するナビゲーションユニット23を用いて停車位置の検知を行うようにしたため、既存の設備を利用して上記停車位置を簡単かつ効率よく検知できるとともに、その結果に基づいて適正に電動ブレーキ10を作動させることができるという利点がある。
【0048】
さらに、上記第1実施形態では、撮像ユニット25および画像処理部17bからなる停止線検知手段により検知された停止線Lの位置に基づいて上記停車位置の検知を行うようにしたため、上記停車位置としてより正確な位置を割り出すことができ、その結果に基づいてより適正なブレーキ制御を行えるという利点がある。
【0049】
また、上記第1実施形態では、ナビゲーションユニット23や撮像ユニット25等により自車両Aの進行方向前方に停車位置が検知され、かつ上記車速センサ21により自車両Aの走行速度Vが所定値(停止可能速度Va)以上であることが検知された場合(図5のステップS13でNOの場合)に、上記制御ユニット17が電動ブレーキ10を作動させるように構成されているため、例えば停車位置を見落とした乗員がブレーキ操作を忘れたりその操作が遅れたりしたような場合でも、停車位置の手前で適正に電動ブレーキ10を作動させて自車両Aを減速させることができ、車両の安全性をより効果的に向上させることができるという利点がある。
【0050】
特に、上記第1実施形態のように、制御ユニット17が電動ブレーキ10を作動させる条件が成立したとき(つまり停車位置が検知されたときの走行速度Vが停止可能速度Vaよりも大きかった場合)に、警報手段29によって乗員に対し所定の警告を行うようにした場合には、その警告によって乗員に注意を促すことができるとともに、何らの警告を行うことなく電動ブレーキ10を作動させた場合と異なり、走行中に電動ブレーキ10が突然作動することによる乗員の違和感を効果的に緩和できるという利点がある。
【0051】
また、上記第1実施形態では、自車両Aがメンテナンス中であることがメンテナンス情報入力部27からの出力信号の有無に基づき確認されると、上記制御ユニット17が電動ブレーキ10の作動を停止させるように構成されているため、自車両Aのメンテナンス中に電動ブレーキ10が不必要に作動してメンテナンス作業に支障が生じること等を効果的に防止できるという利点がある。
【0052】
なお、上記第1実施形態では、車両が停止すべき停車位置が踏切Cや交差点Rの手前である場合を例に挙げて説明を行ったが、停車位置が検知されるのに応じて電動ブレーキ10を作動させる本発明の制御内容は、上記のような踏切Cや交差点Rの手前に自車両Aが位置している場合に限らず適用可能である。例えば、自車両Aが駐車場内にいることがナビゲーションユニット23により検知され、かつ撮像ユニット25および画像処理部17bにより駐車場内の停止線や車止め等が検知された場合には、これらの情報に基づき自車両Aが停止すべき位置(停車位置)を認識して必要に応じ電動ブレーキ10を作動させることにより、乗員による駐車動作を効果的に補助することができる。
【0053】
また、上記第1実施形態では、道路地図上での自車両Aの位置をナビゲーションユニット23で検知するとともに、路面上の停止線Lを撮像ユニット25および画像処理部17bで検知することにより、車両が停止すべき位置(停車位置)を認識するようにしたが、例えばナビゲーションユニット23の位置検出精度が十分に正確なものである場合には、このナビゲーションユニット23のみによって停車位置を検知するようにしてもよい。また、停止線Lを撮像することによって停車位置を検知する上記構成に代えて、信号機Sや各種道路標識等を撮像することによって停車位置を検知するようにしてもよい。
【0054】
また、上記第1実施形態では、電動ブレーキ10の駆動源としてDCモータ等からなるモータ15を設けたが、このような電動ブレーキ10の駆動源は、電力等の供給を受けて電動ブレーキ10を作動させ得るものであれば上記モータ15に限らず、各種電気式アクチュエータ(つまり電力の供給もしくは何らかの電気的信号の入力を受けることで作動する各種アクチュエータ)を用いることが可能である。
【0055】
<実施形態2>
図6は、本発明の第2実施形態を説明するためのブロック図である。この図6の例では、傾斜センサ30および外部通信情報受信部31が制御ユニット17に接続されている。なお、これ以外の構成は、上記第1実施形態と同様である。
【0056】
上記傾斜センサ30は、自車両Aの傾き等に基づいて路面が傾斜していることを検知するものである。
【0057】
上記外部通信情報受信部31は、例えば道路上に設置された何らかの情報発信装置から発せされる情報を受信するものである。すなわち、将来的に、車両の運行にかかわる各種情報(例えば交差点R内の信号機Sの表示が何色であるか等の情報)を所定の情報発信装置により道路上の車両に提供することが考えられるため、このような情報を受信するためのものとして、上記外部通信情報受信部31が設けられている。
【0058】
以上説明した第2実施形態の構成によれば、外部通信情報受信部31で受信された各種情報に基づき自車両Aが停止すべきであるか否か等を判断して、その判断結果に基づき電動ブレーキ10を作動させることが可能である。また、傾斜センサ30により路面が傾斜していることが確認された場合に、自車両Aがその傾斜によって勝手に動き出さないように電動ブレーキ10を作動させることも可能である。そして、このように外部からの通信情報や路面の傾斜状態等に基づき電動ブレーキ10を作動させることで、車両の安全性の向上をより効果的に図ることができる。
【図面の簡単な説明】
【0059】
【図1】本発明の第1実施形態にかかる車両用電動ブレーキ装置が適用された車両の概略構成を示す図である。
【図2】上記電動ブレーキ装置の制御系を示すブロック図である。
【図3】踏切の手前に自車両が位置した状態を示す説明図である。
【図4】交差点の手前に自車両が位置した状態を示す説明図である。
【図5】制御ユニットが行う制御動作の具体的内容を示すフローチャートである。
【図6】本発明の第2実施形態を説明するためのブロック図である。
【符号の説明】
【0060】
1 車両用電動ブレーキ装置
3〜6 車輪
10 電動ブレーキ
15 モータ(電気式アクチュエータ)
17 制御ユニット(制御手段)
17b 画像処理部(停止線検知手段)
21 車速センサ(車速検知手段)
23 ナビゲーションユニット
25 撮像ユニット(停止線検知手段)
29 警報手段
A 自車両
L 停止線
【特許請求の範囲】
【請求項1】
電気式アクチュエータを駆動源とする電動ブレーキの作動により車輪の回転を制動する車両用電動ブレーキ装置であって、
車両が停止すべき位置を検知する停車位置検知手段と、
自車速度を検知する車速検知手段と、
上記停車位置検知手段により自車両の周りに停車位置が検知され、かつ上記車速検知手段により自車両が停止状態にあることが検知された場合に、上記電気式アクチュエータを駆動して上記電動ブレーキを作動させる制御手段とを備えることを特徴とする車両用電動ブレーキ装置。
【請求項2】
請求項1記載の車両用電動ブレーキ装置において、
上記停車位置検知手段は、道路地図上における自車両の位置を検知するナビゲーションユニットであることを特徴とする車両用電動ブレーキ装置。
【請求項3】
請求項1または2記載の車両用電動ブレーキ装置において、
上記停車位置検知手段は、路面上に付された停止線を検知する停止線検知手段であることを特徴とする車両用電動ブレーキ装置。
【請求項4】
請求項1〜3のいずれか1項に記載の車両用電動ブレーキ装置において、
上記制御手段は、上記停車位置検知手段により自車両の進行方向前方に停車位置が検知され、かつ上記車速検知手段により自車両の走行速度が所定値以上であることが検知された場合に、上記電動ブレーキを作動させることを特徴とする車両用電動ブレーキ装置。
【請求項5】
請求項4記載の車両用電動ブレーキ装置において、
上記制御手段が電動ブレーキを作動させる条件が成立したときに乗員に対し所定の警告を行う警報手段をさらに備えることを特徴とする車両用電動ブレーキ装置。
【請求項6】
請求項1〜5のいずれか1項に記載の車両用電動ブレーキ装置において、
上記制御手段は、自車両がメンテナンス中であることが確認されると上記電動ブレーキの作動を停止させることを特徴とする車両用電動ブレーキ装置。
【請求項1】
電気式アクチュエータを駆動源とする電動ブレーキの作動により車輪の回転を制動する車両用電動ブレーキ装置であって、
車両が停止すべき位置を検知する停車位置検知手段と、
自車速度を検知する車速検知手段と、
上記停車位置検知手段により自車両の周りに停車位置が検知され、かつ上記車速検知手段により自車両が停止状態にあることが検知された場合に、上記電気式アクチュエータを駆動して上記電動ブレーキを作動させる制御手段とを備えることを特徴とする車両用電動ブレーキ装置。
【請求項2】
請求項1記載の車両用電動ブレーキ装置において、
上記停車位置検知手段は、道路地図上における自車両の位置を検知するナビゲーションユニットであることを特徴とする車両用電動ブレーキ装置。
【請求項3】
請求項1または2記載の車両用電動ブレーキ装置において、
上記停車位置検知手段は、路面上に付された停止線を検知する停止線検知手段であることを特徴とする車両用電動ブレーキ装置。
【請求項4】
請求項1〜3のいずれか1項に記載の車両用電動ブレーキ装置において、
上記制御手段は、上記停車位置検知手段により自車両の進行方向前方に停車位置が検知され、かつ上記車速検知手段により自車両の走行速度が所定値以上であることが検知された場合に、上記電動ブレーキを作動させることを特徴とする車両用電動ブレーキ装置。
【請求項5】
請求項4記載の車両用電動ブレーキ装置において、
上記制御手段が電動ブレーキを作動させる条件が成立したときに乗員に対し所定の警告を行う警報手段をさらに備えることを特徴とする車両用電動ブレーキ装置。
【請求項6】
請求項1〜5のいずれか1項に記載の車両用電動ブレーキ装置において、
上記制御手段は、自車両がメンテナンス中であることが確認されると上記電動ブレーキの作動を停止させることを特徴とする車両用電動ブレーキ装置。
【図1】


【図2】
【図5】
【図6】
【図3】
【図4】
【図2】
【図5】
【図6】
【図3】
【図4】
【公開番号】特開2009−143308(P2009−143308A)
【公開日】平成21年7月2日(2009.7.2)
【国際特許分類】
【出願番号】特願2007−320969(P2007−320969)
【出願日】平成19年12月12日(2007.12.12)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
【公開日】平成21年7月2日(2009.7.2)
【国際特許分類】
【出願日】平成19年12月12日(2007.12.12)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
[ Back to top ]