
車両用駆動操舵アクチュエータ
【課題】1つの電動モータにより駆動力と操舵力を自在に制御することができ、しかも、電力消費が少ない車両用駆動操舵アクチュエータを提供する。
【解決手段】車輪駆動ユニット200は、電動モータ11の回転を減速して車輪12へ伝達する第1の遊星ギヤ機構13を備え、操舵機構210は、操舵に応じて作動され、電動モータの回転を増減速する無段変速機15と、電動モータの回転動力が直接入力される第1入力部、電動モータの回転動力が無段変速機を介して入力される第2入力部および操舵ユニットを操舵する操舵部材に連結された出力部を有する第2の遊星ギヤ機構17とを備えている。
【解決手段】車輪駆動ユニット200は、電動モータ11の回転を減速して車輪12へ伝達する第1の遊星ギヤ機構13を備え、操舵機構210は、操舵に応じて作動され、電動モータの回転を増減速する無段変速機15と、電動モータの回転動力が直接入力される第1入力部、電動モータの回転動力が無段変速機を介して入力される第2入力部および操舵ユニットを操舵する操舵部材に連結された出力部を有する第2の遊星ギヤ機構17とを備えている。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、1つの電動モータによって車両を駆動したり操舵したりすることができる車両用駆動操舵アクチュエータに関するものである。
【背景技術】
【0002】
車輪駆動用の電動モータの動力を利用して、操舵を制御できるようにした車両駆動用アクチュエータとして、特許文献1に記載されたものが知られている。特許文献1に記載のものは、電動モータと、電動モータの回転を車軸に伝達して車輪を回転駆動する車輪駆動ユニットと、車輪を操舵制御する舵角制御機構とを備え、車輪駆動ユニットは、電動モータの回転を減速して車軸に伝達するとともに、動力を分配可能な遊星ギヤ機構を備え、遊星ギヤ機構によって分配された動力によって、舵角制御機構を作動させるように構成されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−23809号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の車両駆動用アクチュエータにおいては、遊星ギヤ機構を用いており、また、減速用に傘歯車が用いられているため、駆動力(駆動回転数)と操舵力(操舵角速度)の比が常に一定となり、駆動力と操舵力を自在に制御することができない。これは、操舵機構を前輪に用いた場合でも、後輪に用いた場合でも、駆動回転数の制約により、操舵速度や操舵力を車両状態に応じて適切に制御することが難しく、車両姿勢を不安定にしたり、運転者に良くないフィーリングを与えたりする。このため、特許文献1に記載のものにおいては、車両走行時の操舵制御を可能としているものの、車両停止時において自在な操舵を行えるようになっている。
【0005】
しかも、特許文献1に記載のものにおいては、電動モータの一方向の回転に対し、右操舵、左操舵を、2つのクラッチ(44、45)にて切替える構成であるため、クラッチ通電による消費電力が大きくなり、高コストとなるとともに、減速用傘歯車の効率の悪さにより、消費電力がさらに大きくなる問題があった。
【0006】
本発明は上記の課題に鑑みてなされたもので、1つの電動モータにより駆動力と操舵力を自在に制御することができ、しかも、電力消費が少ない車両用駆動操舵アクチュエータを提供することを目的とするものである。
【課題を解決するための手段】
【0007】
上記課題を解決するため、請求項1に係る発明の特徴は、電動モータと、該電動モータの回転によって、車輪を駆動する車輪駆動ユニットと、車輪を操舵する操舵機構とを備えた車両用駆動操舵アクチュエータであって、前記車輪駆動ユニットは、前記電動モータの回転を減速して前記車輪へ伝達する第1の遊星ギヤ機構を備え、前記操舵機構は、操舵に応じて前記電動モータの回転を増減速する無段変速機と、前記電動モータの回転動力が前記無段変速機を介して入力される第1入力部、前記電動モータの回転動力が直接入力される第2入力部および車輪に連結され当該車輪を操舵する出力部を有する第2の遊星ギヤ機構とを備えていることである。
【0008】
請求項2に係る発明の特徴は、請求項1において、前記無段変速機は、トロイダル無段変速機により構成されていることである。
【0009】
請求項3に係る発明の特徴は、請求項1において、前記第1の遊星ギヤ機構は、第1サンギヤと第1キャリヤと第1リングギヤを備え、前記第1サンギヤが前記電動モータに連結され、前記第1キャリヤが前記車輪に連結されていることである。
【0010】
請求項4に係る発明の特徴は、請求項3において、前記第1リングギヤの回転を自由状態にしたり、固定したりするクラッチ機構と、前記第1リングギヤの回転を自由にするべく前記クラッチ機構を制御するクラッチ制御手段を設けたことである。
【0011】
請求項5に係る発明の特徴は、請求項1において、前記第2の遊星ギヤ機構は、第2サンギヤと第2キャリヤと第2リングギヤを備え、前記第2サンギヤが前記無段変速機を介して前記電動モータに連結され、前記第2キャリヤが前記電動モータに連結され、前記第2リングギヤがステアリングギヤボックスの入力側に連結されていることである。
【0012】
請求項6に係る発明の特徴は、請求項2において、前記トロイダル無段変速機のバリエータは、ステアリングホイールの回転を検出するステアリングセンサの出力に応じて作動される電動駆動手段によって回動されることである。
【発明の効果】
【0013】
請求項1に係る発明によれば、車輪駆動ユニットは、電動モータの回転を減速して車輪へ伝達する第1の遊星ギヤ機構を備え、操舵機構は、操舵に応じて電動モータの回転を増減速する無段変速機と、電動モータの回転動力が無段変速機を介して入力される第1入力部、電動モータの回転動力が直接入力される第2入力部および車輪に連結され車輪を操舵する出力部を有する第2の遊星ギヤ機構とを備えている。
【0014】
この構成により、1つの電動モータによって車両を駆動する駆動力と、車両を操舵する操舵力を自在に制御するでき、しかも、無段変速機によって電動モータの回転動力を第2の遊星ギヤ機構の第2入力部に増速あるいは減速して伝達することができるので、走行状態によって正逆転方向に回転される電動モータの回転方向に拘らず、車輪を左右に操舵することができ、車両用駆動操舵アクチュエータを低コストで実現することができるとともに、少ない電力消費で車輪操舵を可能にすることができる。
【0015】
請求項2に係る発明によれば、無段変速機は、トロイダル無段変速機により構成されているので、レバー等によってバリエータを回動するだけの簡単な構成により、第2の遊星ギヤ機構の第2入力部に電動モータの回転動力を無段の変速比にて入力することができる。
【0016】
請求項3に係る発明によれば、第1の遊星ギヤ機構は、第1サンギヤと第1キャリヤと第1リングギヤを備え、第1サンギヤが電動モータに連結され、第1キャリヤが車輪に連結されているので、第1の遊星ギヤ機構によって電動モータの回転を高減速比で車輪に伝達することができる。
【0017】
請求項4に係る発明によれば、第1リングギヤの回転を自由状態にしたり、固定したりするクラッチ機構と、第1リングギヤの回転を自由にするべくクラッチ機構を制御するクラッチ制御手段を設けたので、車輪を停止した状態で、電動モータを駆動して据切操舵を行うことができる。
【0018】
請求項5に係る発明によれば、第2の遊星ギヤ機構は、第2サンギヤと第2キャリヤと第2リングギヤを備え、第2サンギヤが無段変速機を介して電動モータに連結され、第2キャリヤが電動モータに連結され、第2リングギヤがステアリングギヤボックスの入力側に連結されているので、無段変速機による無段変速によって第2サンギヤと第2キャリヤとの回転数差を自在に制御することができ、電動モータの一方向の回転によって第2リングギヤを正逆転することができ、右操舵あるいは左操舵を得ることができる。
【0019】
請求項6に係る発明によれば、トロイダル無段変速機のバリエータは、ステアリングホイールの回転を検出するステアリングセンサの出力に応じて作動される電動駆動手段によって回動されるので、ステアバイワイヤ式の操舵ユニットに適合した車両用駆動操舵アクチュエータを実現することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の実施の形態に係る車両用駆動操舵装置の全体を示す概要図である。
【図2】図1に示す車両用駆動操舵装置に制御ブロック図を併記した図である。
【図3】実施の形態に係るトロイダル無段変速機を示す概要図である。
【図4】トロイダル無段変速機のレバー位置と入力回転数および出力回転数の関係を示す図である。
【図5】トロイダル無段変速機と第2の遊星ギヤ機構の回転数の関係を示す図である。
【図6】実施の形態に係るクラッチ機構を制御するクラッチ制御手段を示す図である。
【図7】クラッチ制御手段の変形例を示す図である。
【図8】ステアバイワイヤシステムを示す図である。
【図9】車両を駆動および操舵するフローチャートを示す図である。
【図10】トロイダル無段変速機のレバー位置と入力トルクおよび出力トルクの関係を示す図である。
【発明を実施するための形態】
【0021】
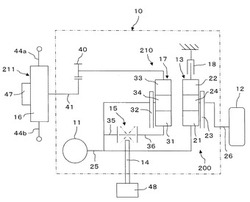
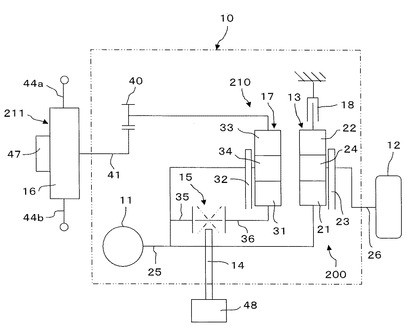
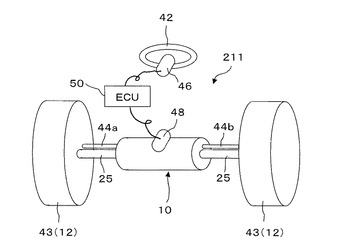
以下本発明の実施の形態を図面に基づいて説明する。図1は、本実施の形態に係る車両用駆動操舵アクチュエータの概要図を示すもので、当該車両用駆動操舵アクチュエータ10は、主として、電動モータ11と、電動モータ11によって駆動され、駆動車輪12を回転駆動する第1の遊星ギヤ機構13と、レバー14の操作によって減速比が変化されるトロイダル無段変速機15と、電動モータ11およびトロイダル無段変速機15によって駆動され、ステアリングギヤボックス16を操舵する第2の遊星ギヤ機構17と、第1の遊星ギヤ機構13のリングギヤの回転を規制あるいは許容するクラッチ機構18とを有している。
【0022】
電動モータ11は、左右の駆動車輪12内にそれぞれ組み込まれたインホイールモータからなり、固定子としてのステータと、ステータの内周に配置された回転子としてのロータとを有している。
【0023】
第1の遊星ギヤ機構13は、同一の軸線の回りにそれぞれ回転可能に支持された第1サンギヤ21、第1リングギヤ22および第1キャリヤ23と、第1キャリヤ23に回転可能に支持された第1遊星ギヤ24とによって構成されている。第1遊星ギヤ24は、第1サンギヤ21と第1リングギヤ22とに同時に噛合い、第1サンギヤ21の周りを公転可能かつ自転可能である。
【0024】
第1サンギヤ21は、電動モータ11の出力軸25に連結され、出力軸25と一体的に回転駆動される。第1キャリヤ23は、駆動車輪12の車輪駆動軸26に連結され、第1キャリヤ23の回転によって車輪駆動軸26を介して駆動車輪12が回転駆動される。電動モータ11は、車両の走行状態に応じて、正回転あるいは逆回転され、これによって、駆動車輪12が正逆回転されて車両が前進後退される。
【0025】
クラッチ機構18は、図6に示すように、ハウジング27と、ハウジング27内に収容された多板クラッチ28を有し、多板クラッチ28の内側クラッチプレート28aが第1リングギヤ22の外周に形成されたスプラインに回転係合され、外側クラッチプレート28bがハウジング27の内周に形成されたスプラインに回転係合されている。多板クラッチ28は、後述する構成のクラッチ制御手段30によって締結されたり、締結が解除されるようになっており、通常は、多板クラッチ28が締結されて、第1リングギヤ22が固定状態に保持されている。
【0026】
第2の遊星ギヤ機構17は、同一の軸線の回りにそれぞれ回転可能に支持された第1入力部をなす第2サンギヤ31と、第2入力部をなす第2キャリヤ32と、出力部をなす第2リングギヤ33と、第2キャリヤ32に回転可能に支持された第2遊星ギヤ34とによって構成されている。第2遊星ギヤ34は、第2サンギヤ31と第2リングギヤ33とに同時に噛合い、第2サンギヤ31の周りを公転可能かつ自転可能である。第2キャリヤ32は、電動モータ11の出力軸25に連結され、出力軸25と一体的に回転駆動されるようになっている。
【0027】
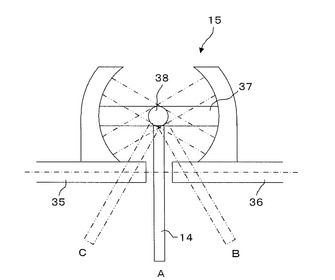
トロイダル無段変速機15の入力軸35は、電動モータ11の出力軸25に連結され、トロイダル無段変速機15の出力軸36は、第2の遊星ギヤ機構17の第2サンギヤ31に連結されている。トロイダル無段変速機15は、よく知られたもので、図3に示すように、レバー14の回転角度を制御することにより、レバー14に一体的に連結されたバリエータ37が回転され、これによって、入力軸35の回転が無段階に変速されて出力軸36に伝達されるようになっている。
【0028】
このように、電動モータ11の回転動力は、第1の遊星ギヤ機構13の第1サンギヤ21および第2の遊星ギヤ機構17の第2キャリヤ32にそれぞれ直接配分されると同時に、第2の遊星ギヤ機構17の第2サンギヤ21にトロイダル無段変速機15を介して配分される。
【0029】
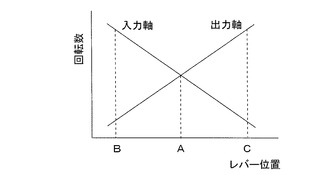
トロイダル無段変速機15のバリエータ37の回転中心部には、バリエータ37の角度を検出するバリエータ角度センサ38が設けられている。図4に、レバー14の角度位置に対する無段変速機15の入力軸35と出力軸36の回転数の関係を示す。図3において、ポジションAはレバー14の中立位置を示し、中立位置においては、入力軸35と出力軸36の回転数は同じとなり、レバー14をポジションAからポジションBに作動させると、入力軸35の回転が減速されて出力軸36に伝達され、反対に、レバー14をポジションAからポジションCに作動させると、入力軸35の回転が増速されて出力軸36に伝達される。
【0030】
上記したように、電動モータ11の回転動力は、第2の遊星ギヤ機構17の第2サンギヤ31および第2キャリヤ32に分割的に配分され、第2キャリヤ32には直接、第2サンギヤ31にはトロイダル無段変速機15を経由して回転が伝達されることにより、第2の遊星ギヤ機構17の第2リングギヤ33は、第2サンギヤ31の回転数と第2キャリヤ32の回転数との差に基づいて正逆回転される。
【0031】
第2リングギヤ33は、減速および方向変換ギヤ40を介して、ステアリングギヤボックス16の入力軸をなすステアリングシャフト41に連結されている。操舵ユニット211は、図8に示すように、ステアリングホイール42と操舵車輪43が機械的に分離され、ステアリングホイール42の回転が電気信号を介して操舵車輪43に伝達されるステアバイワイヤ式の操舵ユニットによって構成されている。なお、FF式の車両においては、操舵車輪43と駆動車輪12は同じものとなる。
【0032】
ステアリングギヤボックス16には、図示してないが、ステアリングシャフト41に連結されたラックピニオン機構が収容され、ラックピニオン機構のラック軸の両端には、タイロッド44a、44bが連結されている。タイロッド44a、44bには、図略のナックルアームを介して左右の操舵車輪43がそれぞれ連結され、ラック軸およびタイロッド44a、44bの軸方向移動により、操舵車輪43が右あるいは左に転舵されるようになっている。ステアバイワイヤ式の操舵ユニット211は、図8に示すように、ステアリングホイール42の操舵を検出するステアリングセンサ46と、タイロッド44a、44bの軸方向移動によって転舵される操舵車輪43の舵角を検出する舵角センサ47(図1参照)と、トロイダル無段変速機15のバリエータ37に連結されたレバー14を回動する電動駆動手段としての電動アクチュエータ48を有している。
【0033】
上記した電動モータ11および第1の遊星ギヤ機構13によって、駆動車輪12を駆動する車輪駆動ユニット200を構成している。また、電動モータ11、第2の遊星ギヤ機構17、トロイダル無段変速機15によって、操舵車輪43を操舵する操舵機構210を構成している。
【0034】
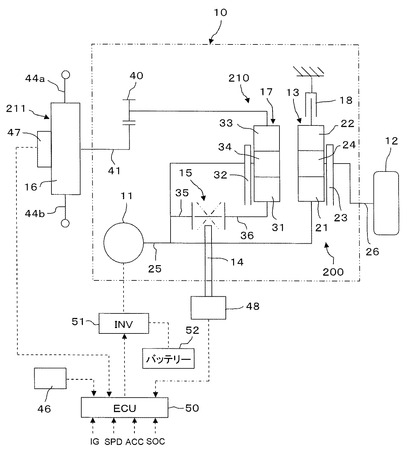
電動モータ11のステータ15の図略のコイルには、図2に示すように、車両運動制御用のECU50によって制御されるインバータ51より電圧が印加されるようになっている。ECU50には、イグニッションスイッチのON、OFF信号IG、車速信号SPD、アクセル開度信号ACCおよびバッテリー充電状態信号SOCが入力されるようになっており、各種信号に応じてインバータ51が制御され、電動モータ11の回転が制御される。なお、図中52は、電動モータ駆動用のバッテリーを示す。
【0035】
従って、ステアリングホイール42の操舵がステアリングセンサ46によって検出されると、ECU50によって電動アクチュエータ48がステアリングセンサ46の信号に応じて作動され、レバー14の角度位置を図4のポジションA(中立位置)からポジションBあるいはポジションC方向に所定角度作動させ、電動モータ11の回転を増速あるいは減速して第2の遊星ギヤ機構17の第2サンギヤ31に伝達する。すなわち、ステアリングホイール42が例えば右方向に操作されると、電動アクチュエータ48によってレバー14がポジションAからポジションB方向に作動され、反対に、左方向に操作されると、電動アクチュエータ48によってレバー14がポジションAからポジションC方向に作動される。レバー14がポジションBあるいはポジションCに作動されると、電動モータ11の回転が増速あるいは減速されて第2の遊星ギヤ機構17の第2サンギヤ31に伝達され、第2サンギヤ31と第2キャリヤ32との回転数に差異がもたらされて、方向変換ギヤ40が作動される。
【0036】
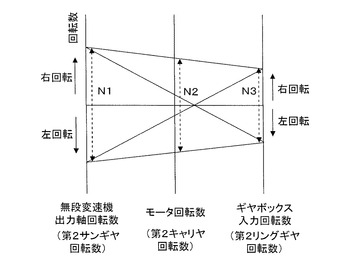
図5は、第2の遊星ギヤ機構17とトロイダル無段変速機15の回転数の関係を示すものである。第2の遊星ギヤ機構17への電動モータ11の回転入力が、例えば、正転方向とすると、トロイダル無段変速機15の入力軸35にも正転方向の回転入力が与えられる。トロイダル無段変速機15は、図3に示すレバー14の角度位置により、無段の変速比にて、正転方向または逆転方向のどちらの方向にも第2の遊星ギヤ機構17の第2サンギヤ31に入力される。また、電動モータ11の回転入力は第2の遊星ギヤ機構17の第2キャリヤ32に直接入力される。これにより、第2の遊星ギヤ機構17の第2リングギヤ33は、電動モータ11の一方向の回転にも係わらず、トロイダル無段変速機15のレバー14の角度位置により、正転方向または逆転方向に回転する。
【0037】
図5においては、中央の縦軸は、電動モータ11の回転数、すなわち、第2の遊星ギヤ機構17の第2キャリヤ32の回転数を示す。また、左側の縦軸は、トロイダル無段変速機15の出力軸36の回転数、すなわち、第2の遊星ギヤ機構17の第2サンギヤ31の回転数を示す。さらに、右側の縦軸は、ステアリングギヤボックス16の入力回転数、すなわち、第2の遊星ギヤ機構17の第2リングギヤ33の回転数を示す。
【0038】
図5より明らかなように、電動モータ11は走行状態によりN2の範囲内で正逆転方向に回転されるが、第2キャリヤ32(トロイダル無段変速機15の出力軸36)は、電動モータ11による入力回転方向に拘らず、N1の範囲内で正回転、逆回転が無段階に可能となり、これにより、第2リングギヤ33がN3の範囲内で正回転、逆回転され、右操舵あるいは左操舵を可能にできる。
【0039】
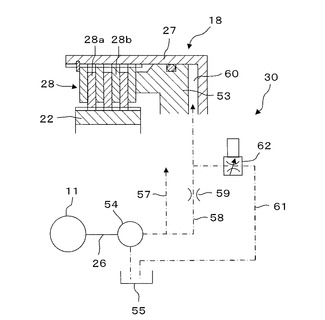
図6は、クラッチ機構18を制御するクラッチ制御手段30の一例を示すもので、電動モータ11を冷却する油圧ポンプの油圧を利用して、油圧ピストンにより多板クラッチ28を加圧することにより、クラッチ機構18を入切(締結、解除)できるようにしている。
【0040】
すなわち、電動モータ11の出力軸25には、電動モータ11を冷却するための油圧ポンプ54が連結されている。電動モータ11の回転によって油圧ポンプ54が駆動されると、リザーバ55より冷却油が汲み上げられ、冷却油供給通路57を介して電動モータ11の冷却系に冷却油が供給される。冷却油供給通路56には、クラッチ制御通路58が分岐され、クラッチ制御通路58は絞り通路59を介して、多板クラッチ28と油圧ピストン53との間に形成された油圧作動室60に接続されている。クラッチ制御通路58には、油圧作動室60と絞り通路59との間にリザーバ55に連通する排出通路61が接続され、この排出通路61中に、ECU50からの信号に基づいて開度が制御されるリニアソレノイドバルブからなるクラッチ制御バルブ62が設けられている。
【0041】
クラッチ制御バルブ62は、通常閉止されており、これによって、クラッチ機構18の油圧作動室60には所定圧の油圧が導入され、クラッチ機構18の多板クラッチ28を締結して、第1の遊星ギヤ機構13の第1リングギヤ22を固定状態に保持している。しかるに、ECU50からのクラッチ制御信号によって、クラッチ制御バルブ62が開放されると、クラッチ機構18の油圧作動室60に導入される油圧が低下され、クラッチ機構18の多板クラッチ28の締結が解除されて、第1リングギヤ22はフリーに回転できる状態となる。
【0042】
このように、クラッチ機構18の油圧作動室60に、クラッチ制御バルブ62によって所定圧の油圧を導入することにより、多板クラッチ28を所定の圧力で締結して、第1の遊星ギヤ機構13の第1リングギヤ22を固定状態に保持し、通常の走行時の最大駆動力では、多板クラッチ28がスリップしないようにしている。しかしながら、駆動車輪12に予期せぬ回転トルクが入力され、多板クラッチ28の締結力以上のトルクが作用すると、多板クラッチ28がスリップする。これによって、第1の遊星ギヤ機構13やその他のアクチュエータ内部構成部品の破損を防止するようにしている。
【0043】
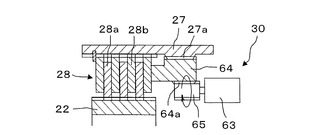
なお、クラッチ制御手段30は、上記した電動モータ11を冷却する油圧ポンプの油圧を利用するものに限定されるものではなく、図7に示すように、電動モータ11とは別の回転モータ63によって、クラッチ機構18の多板クラッチ28を締結および締結解除するものであってもよい。
【0044】
図7において、クラッチ機構18のハウジング27の内周にはねじ部27aが形成され、このねじ部27aに多板クラッチ28を押圧する加圧部材64の外周がねじ係合されている。加圧部材64の内周にはギヤ部64aが形成され、このギヤ部64aに噛合うギヤ65が回転モータ63の出力軸に設けられている。これにより、回転モータ63の回転によりギヤ65を介して加圧部材64が、ねじ作用によって回転と同時に軸方向移動されることにより、多板クラッチ28が締結、あるいは締結解除される。
【0045】
上記した実施の形態において、電動モータ11が正転あるいは逆転駆動されると、電動モータ11の回転は、第1の遊星ギヤ機構13の第1サンギヤ21に伝達される。同時に、電動モータ11の回転は、第2の遊星ギヤ機構17の第2サンギヤ31にトロイダル無段変速機15を介して伝達されるとともに、第2キャリヤ32に直接伝達される。
【0046】
通常時は、クラッチ機構18が締結されて、第1の遊星ギヤ機構13の第1リングギヤ22が固定状態に保持されているため、電動モータ11によって第1サンギヤ21が回転駆動されると、第1キャリヤ23に支持された第1遊星ギヤ24が第1リングギヤ22に噛合いながら公転運動され、第1キャリヤ23が所定の減速比で減速回転される。これにより、車輪駆動軸26を介して駆動車輪12が回転駆動され、車両が電動モータ11の回転数に応じた速度で前進あるいは後退走行される。
【0047】
一方、車両の直進走行時においては、電動モータ11の回転数に対し、第2の遊星ギヤ機構17のギヤ比により算出された適切な回転数を、第2サンギヤ31へ与えるべく、レバー14を適切な位置に保持することにより、第2リングギヤ33は静止状態に保持され、ステアリングシャフト41は回転されず、ステアリングギヤボックス16は中立状態に保持されている。
【0048】
しかる状態で、ステアリングホイール42が、例えば右回りに回転操作されると、これがステアリングセンサ46によって検出され、ステアリングセンサ46の出力信号に基づいて電動アクチュエータ48が、レバー14を前述の直進走行時の位置からポジションB方向に作動させる。かかるレバー14のポジションAからポジションB方向への作動により、トロイダル無段変速機15のバリエータ37が図3の反時計回りに回動され、トロイダル無段変速機15の入力軸35の回転が出力軸36に変速(減速)して伝えられる。
【0049】
これによって、第2の遊星ギヤ機構17の第2サンギヤ31の回転数が、第2キャリヤ32の回転数より低くなるため、第2サンギヤ31と第2キャリヤ32との回転差によって方向変換ギヤ40が一方向に回動され、ステアリングギヤボックス16のタイロッド44a、44bを介して操舵車輪43が右方向に転舵される。
【0050】
反対に、ステアリングホイール42が、左回りに回転操作されると、ステアリングセンサ46の出力信号に基づいて電動アクチュエータ48が、前記と反対に、レバー14を前述の直進走行時の位置からポジションC方向に作動させる。かかるレバー14のポジションAからポジションC方向への作動により、トロイダル無段変速機15のバリエータ37が図3の反時計回りに回動され、トロイダル無段変速機15の入力軸35の回転が出力軸36に増速して伝えられる。
【0051】
これによって、第2の遊星ギヤ機構17の第2サンギヤ31の回転数が、第2キャリヤ32の回転数より高くなるため、第2サンギヤ31と第2キャリヤ32との回転差によって方向変換ギヤ40が前記と逆方向に回動され、ステアリングギヤボックス16のタイロッド44a、44bを介して操舵車輪43が左方向に転舵される。
【0052】
ただし、上記した本例では、レバー14のポジションBへの作動により右方向に転舵、レバー14のポジションCへの作動により左方向に転舵されると記したが、方向変換ギヤ40の構成、ステアリングギヤボックス16の内部構成により、それぞれ逆方向に転舵される場合もある。
【0053】
ところで、車両の停止状態において、クラッチ機構18の締結を解除することにより、第1の遊星ギヤ機構13の第1リングギヤ22がフリーで回転できるように制御される。従って、ステアリングホイール42の操作に基づいて、電動モータ11が駆動され、第1の遊星ギヤ機構13の第1サンギヤ21が回転駆動されても、第1リングギヤ22の回転によって、第1キャリヤ23は回転することなく、駆動車輪12を静止状態に保持することができ、据切操舵が可能となる。
【0054】
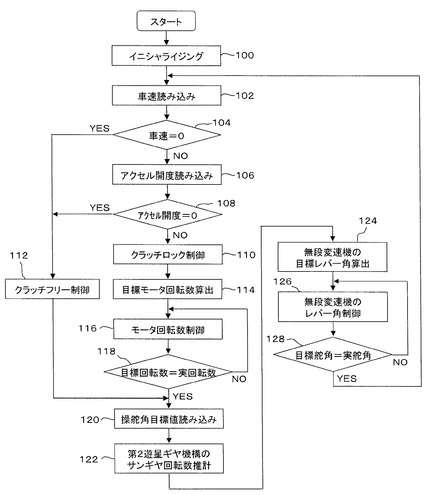
次に、上記した実施の形態における車両の駆動および操舵の動作を、図9のフローチャートに基づいて説明する。かかるフローチャートはイグニッションスイッチがONされることに基づいて実行される。
【0055】
まず、ステップ100において、ECU50のメモリに記憶された変数をイニシャライジング(初期化)し、次いでステップ102で、ECU50に入力された車速SPDが読込まれる。ステップ104では、車速SPDが0であるか否かが判別され、0(YES)である場合には、ステップ112に移行してクラッチ機構18がフリー回転できるように制御される。すなわち、車速が0の場合には、図6に示すクラッチ制御手段30のクラッチ制御バルブ62が開口制御され、第1のリングギヤ22がフリーに回転できるように、クラッチ機構18の多板クラッチ28の締結が解除され、後述するステップ120に移行される。
【0056】
ステップ104における判別結果がNOの場合には、ステップ106において、ECU50に入力されたアクセル開度ACCが読込まれ、続くステップ108において、アクセル開度ACCが0であるか否かが判別され、0(YES)である場合には、上記したステップ112に移行して、第1のリングギヤ22がフリーに回転できるように、クラッチ機構18の多板クラッチ28の締結が解除される。ステップ108における判別結果がNOの場合には、ステップ110に移行され、クラッチ機構18が締結される。すなわち、クラッチ制御手段30のクラッチ制御バルブ62が閉止制御されて、多板クラッチ28が締結され、第1の遊星ギヤ機構13の第1のリングギヤ22が静止状態に固定される。
【0057】
次いで、ステップ114において、電動モータ11の目標回転数がアクセル開度ACCに応じて算出され、ステップ116では、電動モータ11の回転数が算出された目標回転数に近づく方向に回転制御される。続いて、ステップ118では、電動モータ11の実回転数が、ステップ112で算出された目標回転数に等しくなったか否かが判別され、NOの場合には、ステップ116に戻って電動モータ11の回転制御が続行される。電動モータ11の実回転数が目標回転数に等しくなると、ステップ118における判別結果がYESとなり、ステップ120に進む。
【0058】
このように、電動モータ11がアクセル開度ACCに応じた目標回転数に回転制御されることにより、電動モータ11の回転が第1の遊星ギヤ機構13によって減速回転される駆動車輪12も、アクセル開度ACCに応じた回転数(回転速度)で駆動され、車両はアクセル開度に応じた速度で走行される。すなわち、電動モータ11によって第1のサンギヤ21が回転されると、第1のキャリヤ23に支持された遊星ギヤ24が第1のリングギヤ22に噛合いながら公転運動されることにより、第1のキャリヤ23が所定の減速比で減速回転され、駆動車輪12が回転駆動されて、車両が電動モータ11の回転数に応じた速度で走行される。
【0059】
ところで、車両の走行中にステアリングホイール42が回転操作されると、ステアリングホイール42の操作量(操作角)がステアリングセンサ46によって検出され、ステップ120においてステアリングホイール42の操作量に応じた操舵角の目標値が読み込まれる。次いで、ステップ122においては、操舵角を目標値に制御するに必要な第2の遊星ギヤ機構17の第2サンギヤ31の回転数が推計される。続いて、ステップ124においては、ステップ122で推計された第2サンギヤ31の回転数を得るに必要な無段変速機15のレバー14の目標角が算出され、これに基づいてステップ126において、電動アクチュエータ48によりレバー14が目標角に制御される。
【0060】
これにより、レバー14によって無段変速機15のバリエータ37が回転され、バリエータ37の回転に応じた所定の増速比あるいは減速比で入力軸35の回転が出力軸36に伝達され、第2の遊星ギヤ機構17の第2サンギヤ31がステップ122で推計された回転数に回転制御される。
【0061】
従って、電動モータ11の回転が第2キャリヤ32に直接伝えられるのに対し、第2サンギヤ31が目標操舵角に応じた回転数に回転制御されることにより、無段変速機15の制御によって、第1サンギヤ31と第2キャリヤ32が異なる回転数で回転できるようになり、第2の遊星ギヤ機構17の第2リングギヤ33が、一方向(右方向)あるいはそれと反対方向(左方向)に回転される。
【0062】
このようにして、ステアリングホイール42の右方向(左方向)の回転操作により、第2の遊星ギヤ機構17の第2リングギヤ33が、一方向(他方向)に回転されると、方向変換ギヤ40を介してステアリングギヤボックス16が作動され、タイロッド44a、44bが一方向(他方向)に移動され、図略のナックルアームを介して操舵車輪43が右方向(左方向)に転舵される。
【0063】
操舵車輪43の実舵角は舵角センサ47によって検出され、ステップ128において、舵角センサ47によって検出された実舵角が、上記ステップ120で読み込まれた目標舵角に等しくなったか否かが判別され、判別結果がNOの場合には、ステップ126の処理が続行され、YESになると、ステップ102に戻って新たに車速が読み込まれ、上記した動作を繰り返す。
【0064】
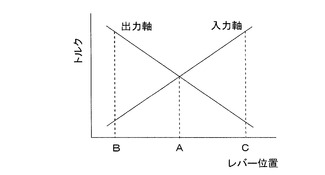
なお、電動モータ11の回転数とトルクは逆数の関係となり、レバー14の角度位置に対する無段変速機15の入力軸35と出力軸36のトルクの関係は、図10に示すようになる。すなわち、図10においては、上記した図4とは逆に、レバー14をポジションAからポジションB方向に作動させると、出力軸36に伝達されるトルクは増大し、レバー14をポジションAからポジションC方向に作動させると、出力軸36に伝達されるトルクは減少する。
【0065】
従って、図9で述べたステップ114〜118において、電動モータ11の目標回転数を算出する代わりに、電動モータ11の目標トルクを算出して、その目標トルクに一致するまで電動モータ11を回転制御するようにしてもよい。
【0066】
上記した実施の形態によれば、車輪駆動ユニット200は、電動モータ11の回転を減速して駆動車輪12へ伝達する第1の遊星ギヤ機構13を備え、操舵機構210は、操舵に応じて電動モータ11の回転を増減速するトロイダル無段変速機15と、電動モータ11の回転動力がトロイダル無段変速機15を介して入力される第2サンギヤ31、電動モータ11の回転動力が直接入力される第2キャリヤ32および操舵車輪43に連結され操舵車輪43を操舵する第2リングギヤ33を有する第2の遊星ギヤ機構13とを備えている。
【0067】
この構成により、トロイダル無段変速機15によって電動モータ11の回転動力を第2の遊星ギヤ機構17の第2サンギヤ31に増速あるいは減速して伝達することができるので、1つの電動モータ11によって駆動車輪12を駆動する駆動力と、操舵車輪43を操舵する操舵力を自在に制御することができる。しかも、無段変速機15によって電動モータ11の回転動力を第2の遊星ギヤ機構17の第2サンギヤ31に増速あるいは減速して伝達することができるので、走行状態によって正逆転方向に回転される電動モータ11の回転方向に拘らず、操舵車輪43を左右に操舵することができ、車両用駆動操舵アクチュエータ10を低コストで実現することができるとともに、少ない電力消費で車輪操舵を可能にすることができる。
【0068】
さらには、トロイダル無段変速機15のバリエータ37をレバー等によって回動するだけの簡単な構成により、操舵車輪43を左右に操舵することができるので、車両用駆動操舵アクチュエータ10を低コストで実現することができるとともに、少ない電力消費で操舵車輪43の操舵を可能にすることができる。
【0069】
また、上記した実施の形態によれば、第1遊星ギヤ機構13の第1リングギヤ22の回転を自由状態にしたり、固定したりするクラッチ機構14と、第1リングギヤ22の回転を自由にするべくクラッチ機構14を制御するクラッチ制御手段30を設けたので、駆動車輪12を停止した状態で、電動モータ11を駆動して操舵車輪43を据切操舵することができる。
【0070】
上記した実施の形態においては、無段変速機15としてトロイダル無段変速機を用いた例について述べたが、本発明は、トロイダル無段変速機15に限定されるものではなく、例えば、直径が変化する2つのプーリにベルトを通したベルト式CVT等の無段変速機を用いてもよい。
【0071】
また、上記した実施の形態においては、第2の遊星ギヤ機構17の第2サンギヤ31に無段変速機15を介して電動モータ11を連結し、第2キャリヤ32に電動モータ11を直接連結し、第2リングギヤ33をステアリングギヤボックス16に連結したが、第2の遊星ギヤ機構17の第2サンギヤ31、第2キャリヤ32および第2リングギヤ33のうちの何れか2つを、電動モータ11の回転動力が入力される入力部とし、残りの1つを操舵車輪43を操舵するための出力部としてもよい。
【0072】
さらに、上記した実施の形態においては、本発明の車両用駆動操舵アクチュエータ10を、ステアバイワイヤ式の操舵ユニット211に用いた例について述べたが、本発明は、ステアバイワイヤ式の操舵ユニット211に限定されるものではなく、ステアリングホイール42と操舵車輪43とを機械的に連結した構成の操舵ユニットにも適用可能である。
【0073】
斯様に、本発明は上記した実施の形態に限定されることなく、特許請求の範囲に記載した本発明の主旨を逸脱しない範囲内で種々の変形が可能であることは勿論である。
【産業上の利用可能性】
【0074】
本発明に係る車両用駆動操舵アクチュエータは、電動モータによって作動される車輪駆動ユニットと操舵機構を備えた車両に用いるのに適している。
【符号の説明】
【0075】
10…車両用駆動操舵システム、11…電動モータ、12…駆動車輪、13…第1の遊星ギヤ機構、14…コントロールレバー、15…トロイダル無段変速機、16…ステアリングギヤボックス、17…第2の遊星ギヤ機構、18…クラッチ機構、21…第1サンギヤ、22…第1リングギヤ、23…第1キャリヤ、24…第1遊星ギヤ、25…出力軸、26…車輪駆動軸、31…第2サンギヤ、32…第2キャリヤ、33…第2リングギヤ、34…第2遊星ギヤ、35…入力軸、36…出力軸、37…バリエータ、41…ステアリングシャフト、42…ステアリングホイール、43…操舵車輪、46…ステアリングセンサ、48…電動駆動手段(電動アクチュエータ)、200…車輪駆動ユニット、210…操舵機構、211…操舵ユニット。
【技術分野】
【0001】
本発明は、1つの電動モータによって車両を駆動したり操舵したりすることができる車両用駆動操舵アクチュエータに関するものである。
【背景技術】
【0002】
車輪駆動用の電動モータの動力を利用して、操舵を制御できるようにした車両駆動用アクチュエータとして、特許文献1に記載されたものが知られている。特許文献1に記載のものは、電動モータと、電動モータの回転を車軸に伝達して車輪を回転駆動する車輪駆動ユニットと、車輪を操舵制御する舵角制御機構とを備え、車輪駆動ユニットは、電動モータの回転を減速して車軸に伝達するとともに、動力を分配可能な遊星ギヤ機構を備え、遊星ギヤ機構によって分配された動力によって、舵角制御機構を作動させるように構成されている。
【先行技術文献】
【特許文献】
【0003】
【特許文献1】特開2010−23809号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に記載の車両駆動用アクチュエータにおいては、遊星ギヤ機構を用いており、また、減速用に傘歯車が用いられているため、駆動力(駆動回転数)と操舵力(操舵角速度)の比が常に一定となり、駆動力と操舵力を自在に制御することができない。これは、操舵機構を前輪に用いた場合でも、後輪に用いた場合でも、駆動回転数の制約により、操舵速度や操舵力を車両状態に応じて適切に制御することが難しく、車両姿勢を不安定にしたり、運転者に良くないフィーリングを与えたりする。このため、特許文献1に記載のものにおいては、車両走行時の操舵制御を可能としているものの、車両停止時において自在な操舵を行えるようになっている。
【0005】
しかも、特許文献1に記載のものにおいては、電動モータの一方向の回転に対し、右操舵、左操舵を、2つのクラッチ(44、45)にて切替える構成であるため、クラッチ通電による消費電力が大きくなり、高コストとなるとともに、減速用傘歯車の効率の悪さにより、消費電力がさらに大きくなる問題があった。
【0006】
本発明は上記の課題に鑑みてなされたもので、1つの電動モータにより駆動力と操舵力を自在に制御することができ、しかも、電力消費が少ない車両用駆動操舵アクチュエータを提供することを目的とするものである。
【課題を解決するための手段】
【0007】
上記課題を解決するため、請求項1に係る発明の特徴は、電動モータと、該電動モータの回転によって、車輪を駆動する車輪駆動ユニットと、車輪を操舵する操舵機構とを備えた車両用駆動操舵アクチュエータであって、前記車輪駆動ユニットは、前記電動モータの回転を減速して前記車輪へ伝達する第1の遊星ギヤ機構を備え、前記操舵機構は、操舵に応じて前記電動モータの回転を増減速する無段変速機と、前記電動モータの回転動力が前記無段変速機を介して入力される第1入力部、前記電動モータの回転動力が直接入力される第2入力部および車輪に連結され当該車輪を操舵する出力部を有する第2の遊星ギヤ機構とを備えていることである。
【0008】
請求項2に係る発明の特徴は、請求項1において、前記無段変速機は、トロイダル無段変速機により構成されていることである。
【0009】
請求項3に係る発明の特徴は、請求項1において、前記第1の遊星ギヤ機構は、第1サンギヤと第1キャリヤと第1リングギヤを備え、前記第1サンギヤが前記電動モータに連結され、前記第1キャリヤが前記車輪に連結されていることである。
【0010】
請求項4に係る発明の特徴は、請求項3において、前記第1リングギヤの回転を自由状態にしたり、固定したりするクラッチ機構と、前記第1リングギヤの回転を自由にするべく前記クラッチ機構を制御するクラッチ制御手段を設けたことである。
【0011】
請求項5に係る発明の特徴は、請求項1において、前記第2の遊星ギヤ機構は、第2サンギヤと第2キャリヤと第2リングギヤを備え、前記第2サンギヤが前記無段変速機を介して前記電動モータに連結され、前記第2キャリヤが前記電動モータに連結され、前記第2リングギヤがステアリングギヤボックスの入力側に連結されていることである。
【0012】
請求項6に係る発明の特徴は、請求項2において、前記トロイダル無段変速機のバリエータは、ステアリングホイールの回転を検出するステアリングセンサの出力に応じて作動される電動駆動手段によって回動されることである。
【発明の効果】
【0013】
請求項1に係る発明によれば、車輪駆動ユニットは、電動モータの回転を減速して車輪へ伝達する第1の遊星ギヤ機構を備え、操舵機構は、操舵に応じて電動モータの回転を増減速する無段変速機と、電動モータの回転動力が無段変速機を介して入力される第1入力部、電動モータの回転動力が直接入力される第2入力部および車輪に連結され車輪を操舵する出力部を有する第2の遊星ギヤ機構とを備えている。
【0014】
この構成により、1つの電動モータによって車両を駆動する駆動力と、車両を操舵する操舵力を自在に制御するでき、しかも、無段変速機によって電動モータの回転動力を第2の遊星ギヤ機構の第2入力部に増速あるいは減速して伝達することができるので、走行状態によって正逆転方向に回転される電動モータの回転方向に拘らず、車輪を左右に操舵することができ、車両用駆動操舵アクチュエータを低コストで実現することができるとともに、少ない電力消費で車輪操舵を可能にすることができる。
【0015】
請求項2に係る発明によれば、無段変速機は、トロイダル無段変速機により構成されているので、レバー等によってバリエータを回動するだけの簡単な構成により、第2の遊星ギヤ機構の第2入力部に電動モータの回転動力を無段の変速比にて入力することができる。
【0016】
請求項3に係る発明によれば、第1の遊星ギヤ機構は、第1サンギヤと第1キャリヤと第1リングギヤを備え、第1サンギヤが電動モータに連結され、第1キャリヤが車輪に連結されているので、第1の遊星ギヤ機構によって電動モータの回転を高減速比で車輪に伝達することができる。
【0017】
請求項4に係る発明によれば、第1リングギヤの回転を自由状態にしたり、固定したりするクラッチ機構と、第1リングギヤの回転を自由にするべくクラッチ機構を制御するクラッチ制御手段を設けたので、車輪を停止した状態で、電動モータを駆動して据切操舵を行うことができる。
【0018】
請求項5に係る発明によれば、第2の遊星ギヤ機構は、第2サンギヤと第2キャリヤと第2リングギヤを備え、第2サンギヤが無段変速機を介して電動モータに連結され、第2キャリヤが電動モータに連結され、第2リングギヤがステアリングギヤボックスの入力側に連結されているので、無段変速機による無段変速によって第2サンギヤと第2キャリヤとの回転数差を自在に制御することができ、電動モータの一方向の回転によって第2リングギヤを正逆転することができ、右操舵あるいは左操舵を得ることができる。
【0019】
請求項6に係る発明によれば、トロイダル無段変速機のバリエータは、ステアリングホイールの回転を検出するステアリングセンサの出力に応じて作動される電動駆動手段によって回動されるので、ステアバイワイヤ式の操舵ユニットに適合した車両用駆動操舵アクチュエータを実現することができる。
【図面の簡単な説明】
【0020】
【図1】本発明の実施の形態に係る車両用駆動操舵装置の全体を示す概要図である。
【図2】図1に示す車両用駆動操舵装置に制御ブロック図を併記した図である。
【図3】実施の形態に係るトロイダル無段変速機を示す概要図である。
【図4】トロイダル無段変速機のレバー位置と入力回転数および出力回転数の関係を示す図である。
【図5】トロイダル無段変速機と第2の遊星ギヤ機構の回転数の関係を示す図である。
【図6】実施の形態に係るクラッチ機構を制御するクラッチ制御手段を示す図である。
【図7】クラッチ制御手段の変形例を示す図である。
【図8】ステアバイワイヤシステムを示す図である。
【図9】車両を駆動および操舵するフローチャートを示す図である。
【図10】トロイダル無段変速機のレバー位置と入力トルクおよび出力トルクの関係を示す図である。
【発明を実施するための形態】
【0021】
以下本発明の実施の形態を図面に基づいて説明する。図1は、本実施の形態に係る車両用駆動操舵アクチュエータの概要図を示すもので、当該車両用駆動操舵アクチュエータ10は、主として、電動モータ11と、電動モータ11によって駆動され、駆動車輪12を回転駆動する第1の遊星ギヤ機構13と、レバー14の操作によって減速比が変化されるトロイダル無段変速機15と、電動モータ11およびトロイダル無段変速機15によって駆動され、ステアリングギヤボックス16を操舵する第2の遊星ギヤ機構17と、第1の遊星ギヤ機構13のリングギヤの回転を規制あるいは許容するクラッチ機構18とを有している。
【0022】
電動モータ11は、左右の駆動車輪12内にそれぞれ組み込まれたインホイールモータからなり、固定子としてのステータと、ステータの内周に配置された回転子としてのロータとを有している。
【0023】
第1の遊星ギヤ機構13は、同一の軸線の回りにそれぞれ回転可能に支持された第1サンギヤ21、第1リングギヤ22および第1キャリヤ23と、第1キャリヤ23に回転可能に支持された第1遊星ギヤ24とによって構成されている。第1遊星ギヤ24は、第1サンギヤ21と第1リングギヤ22とに同時に噛合い、第1サンギヤ21の周りを公転可能かつ自転可能である。
【0024】
第1サンギヤ21は、電動モータ11の出力軸25に連結され、出力軸25と一体的に回転駆動される。第1キャリヤ23は、駆動車輪12の車輪駆動軸26に連結され、第1キャリヤ23の回転によって車輪駆動軸26を介して駆動車輪12が回転駆動される。電動モータ11は、車両の走行状態に応じて、正回転あるいは逆回転され、これによって、駆動車輪12が正逆回転されて車両が前進後退される。
【0025】
クラッチ機構18は、図6に示すように、ハウジング27と、ハウジング27内に収容された多板クラッチ28を有し、多板クラッチ28の内側クラッチプレート28aが第1リングギヤ22の外周に形成されたスプラインに回転係合され、外側クラッチプレート28bがハウジング27の内周に形成されたスプラインに回転係合されている。多板クラッチ28は、後述する構成のクラッチ制御手段30によって締結されたり、締結が解除されるようになっており、通常は、多板クラッチ28が締結されて、第1リングギヤ22が固定状態に保持されている。
【0026】
第2の遊星ギヤ機構17は、同一の軸線の回りにそれぞれ回転可能に支持された第1入力部をなす第2サンギヤ31と、第2入力部をなす第2キャリヤ32と、出力部をなす第2リングギヤ33と、第2キャリヤ32に回転可能に支持された第2遊星ギヤ34とによって構成されている。第2遊星ギヤ34は、第2サンギヤ31と第2リングギヤ33とに同時に噛合い、第2サンギヤ31の周りを公転可能かつ自転可能である。第2キャリヤ32は、電動モータ11の出力軸25に連結され、出力軸25と一体的に回転駆動されるようになっている。
【0027】
トロイダル無段変速機15の入力軸35は、電動モータ11の出力軸25に連結され、トロイダル無段変速機15の出力軸36は、第2の遊星ギヤ機構17の第2サンギヤ31に連結されている。トロイダル無段変速機15は、よく知られたもので、図3に示すように、レバー14の回転角度を制御することにより、レバー14に一体的に連結されたバリエータ37が回転され、これによって、入力軸35の回転が無段階に変速されて出力軸36に伝達されるようになっている。
【0028】
このように、電動モータ11の回転動力は、第1の遊星ギヤ機構13の第1サンギヤ21および第2の遊星ギヤ機構17の第2キャリヤ32にそれぞれ直接配分されると同時に、第2の遊星ギヤ機構17の第2サンギヤ21にトロイダル無段変速機15を介して配分される。
【0029】
トロイダル無段変速機15のバリエータ37の回転中心部には、バリエータ37の角度を検出するバリエータ角度センサ38が設けられている。図4に、レバー14の角度位置に対する無段変速機15の入力軸35と出力軸36の回転数の関係を示す。図3において、ポジションAはレバー14の中立位置を示し、中立位置においては、入力軸35と出力軸36の回転数は同じとなり、レバー14をポジションAからポジションBに作動させると、入力軸35の回転が減速されて出力軸36に伝達され、反対に、レバー14をポジションAからポジションCに作動させると、入力軸35の回転が増速されて出力軸36に伝達される。
【0030】
上記したように、電動モータ11の回転動力は、第2の遊星ギヤ機構17の第2サンギヤ31および第2キャリヤ32に分割的に配分され、第2キャリヤ32には直接、第2サンギヤ31にはトロイダル無段変速機15を経由して回転が伝達されることにより、第2の遊星ギヤ機構17の第2リングギヤ33は、第2サンギヤ31の回転数と第2キャリヤ32の回転数との差に基づいて正逆回転される。
【0031】
第2リングギヤ33は、減速および方向変換ギヤ40を介して、ステアリングギヤボックス16の入力軸をなすステアリングシャフト41に連結されている。操舵ユニット211は、図8に示すように、ステアリングホイール42と操舵車輪43が機械的に分離され、ステアリングホイール42の回転が電気信号を介して操舵車輪43に伝達されるステアバイワイヤ式の操舵ユニットによって構成されている。なお、FF式の車両においては、操舵車輪43と駆動車輪12は同じものとなる。
【0032】
ステアリングギヤボックス16には、図示してないが、ステアリングシャフト41に連結されたラックピニオン機構が収容され、ラックピニオン機構のラック軸の両端には、タイロッド44a、44bが連結されている。タイロッド44a、44bには、図略のナックルアームを介して左右の操舵車輪43がそれぞれ連結され、ラック軸およびタイロッド44a、44bの軸方向移動により、操舵車輪43が右あるいは左に転舵されるようになっている。ステアバイワイヤ式の操舵ユニット211は、図8に示すように、ステアリングホイール42の操舵を検出するステアリングセンサ46と、タイロッド44a、44bの軸方向移動によって転舵される操舵車輪43の舵角を検出する舵角センサ47(図1参照)と、トロイダル無段変速機15のバリエータ37に連結されたレバー14を回動する電動駆動手段としての電動アクチュエータ48を有している。
【0033】
上記した電動モータ11および第1の遊星ギヤ機構13によって、駆動車輪12を駆動する車輪駆動ユニット200を構成している。また、電動モータ11、第2の遊星ギヤ機構17、トロイダル無段変速機15によって、操舵車輪43を操舵する操舵機構210を構成している。
【0034】
電動モータ11のステータ15の図略のコイルには、図2に示すように、車両運動制御用のECU50によって制御されるインバータ51より電圧が印加されるようになっている。ECU50には、イグニッションスイッチのON、OFF信号IG、車速信号SPD、アクセル開度信号ACCおよびバッテリー充電状態信号SOCが入力されるようになっており、各種信号に応じてインバータ51が制御され、電動モータ11の回転が制御される。なお、図中52は、電動モータ駆動用のバッテリーを示す。
【0035】
従って、ステアリングホイール42の操舵がステアリングセンサ46によって検出されると、ECU50によって電動アクチュエータ48がステアリングセンサ46の信号に応じて作動され、レバー14の角度位置を図4のポジションA(中立位置)からポジションBあるいはポジションC方向に所定角度作動させ、電動モータ11の回転を増速あるいは減速して第2の遊星ギヤ機構17の第2サンギヤ31に伝達する。すなわち、ステアリングホイール42が例えば右方向に操作されると、電動アクチュエータ48によってレバー14がポジションAからポジションB方向に作動され、反対に、左方向に操作されると、電動アクチュエータ48によってレバー14がポジションAからポジションC方向に作動される。レバー14がポジションBあるいはポジションCに作動されると、電動モータ11の回転が増速あるいは減速されて第2の遊星ギヤ機構17の第2サンギヤ31に伝達され、第2サンギヤ31と第2キャリヤ32との回転数に差異がもたらされて、方向変換ギヤ40が作動される。
【0036】
図5は、第2の遊星ギヤ機構17とトロイダル無段変速機15の回転数の関係を示すものである。第2の遊星ギヤ機構17への電動モータ11の回転入力が、例えば、正転方向とすると、トロイダル無段変速機15の入力軸35にも正転方向の回転入力が与えられる。トロイダル無段変速機15は、図3に示すレバー14の角度位置により、無段の変速比にて、正転方向または逆転方向のどちらの方向にも第2の遊星ギヤ機構17の第2サンギヤ31に入力される。また、電動モータ11の回転入力は第2の遊星ギヤ機構17の第2キャリヤ32に直接入力される。これにより、第2の遊星ギヤ機構17の第2リングギヤ33は、電動モータ11の一方向の回転にも係わらず、トロイダル無段変速機15のレバー14の角度位置により、正転方向または逆転方向に回転する。
【0037】
図5においては、中央の縦軸は、電動モータ11の回転数、すなわち、第2の遊星ギヤ機構17の第2キャリヤ32の回転数を示す。また、左側の縦軸は、トロイダル無段変速機15の出力軸36の回転数、すなわち、第2の遊星ギヤ機構17の第2サンギヤ31の回転数を示す。さらに、右側の縦軸は、ステアリングギヤボックス16の入力回転数、すなわち、第2の遊星ギヤ機構17の第2リングギヤ33の回転数を示す。
【0038】
図5より明らかなように、電動モータ11は走行状態によりN2の範囲内で正逆転方向に回転されるが、第2キャリヤ32(トロイダル無段変速機15の出力軸36)は、電動モータ11による入力回転方向に拘らず、N1の範囲内で正回転、逆回転が無段階に可能となり、これにより、第2リングギヤ33がN3の範囲内で正回転、逆回転され、右操舵あるいは左操舵を可能にできる。
【0039】
図6は、クラッチ機構18を制御するクラッチ制御手段30の一例を示すもので、電動モータ11を冷却する油圧ポンプの油圧を利用して、油圧ピストンにより多板クラッチ28を加圧することにより、クラッチ機構18を入切(締結、解除)できるようにしている。
【0040】
すなわち、電動モータ11の出力軸25には、電動モータ11を冷却するための油圧ポンプ54が連結されている。電動モータ11の回転によって油圧ポンプ54が駆動されると、リザーバ55より冷却油が汲み上げられ、冷却油供給通路57を介して電動モータ11の冷却系に冷却油が供給される。冷却油供給通路56には、クラッチ制御通路58が分岐され、クラッチ制御通路58は絞り通路59を介して、多板クラッチ28と油圧ピストン53との間に形成された油圧作動室60に接続されている。クラッチ制御通路58には、油圧作動室60と絞り通路59との間にリザーバ55に連通する排出通路61が接続され、この排出通路61中に、ECU50からの信号に基づいて開度が制御されるリニアソレノイドバルブからなるクラッチ制御バルブ62が設けられている。
【0041】
クラッチ制御バルブ62は、通常閉止されており、これによって、クラッチ機構18の油圧作動室60には所定圧の油圧が導入され、クラッチ機構18の多板クラッチ28を締結して、第1の遊星ギヤ機構13の第1リングギヤ22を固定状態に保持している。しかるに、ECU50からのクラッチ制御信号によって、クラッチ制御バルブ62が開放されると、クラッチ機構18の油圧作動室60に導入される油圧が低下され、クラッチ機構18の多板クラッチ28の締結が解除されて、第1リングギヤ22はフリーに回転できる状態となる。
【0042】
このように、クラッチ機構18の油圧作動室60に、クラッチ制御バルブ62によって所定圧の油圧を導入することにより、多板クラッチ28を所定の圧力で締結して、第1の遊星ギヤ機構13の第1リングギヤ22を固定状態に保持し、通常の走行時の最大駆動力では、多板クラッチ28がスリップしないようにしている。しかしながら、駆動車輪12に予期せぬ回転トルクが入力され、多板クラッチ28の締結力以上のトルクが作用すると、多板クラッチ28がスリップする。これによって、第1の遊星ギヤ機構13やその他のアクチュエータ内部構成部品の破損を防止するようにしている。
【0043】
なお、クラッチ制御手段30は、上記した電動モータ11を冷却する油圧ポンプの油圧を利用するものに限定されるものではなく、図7に示すように、電動モータ11とは別の回転モータ63によって、クラッチ機構18の多板クラッチ28を締結および締結解除するものであってもよい。
【0044】
図7において、クラッチ機構18のハウジング27の内周にはねじ部27aが形成され、このねじ部27aに多板クラッチ28を押圧する加圧部材64の外周がねじ係合されている。加圧部材64の内周にはギヤ部64aが形成され、このギヤ部64aに噛合うギヤ65が回転モータ63の出力軸に設けられている。これにより、回転モータ63の回転によりギヤ65を介して加圧部材64が、ねじ作用によって回転と同時に軸方向移動されることにより、多板クラッチ28が締結、あるいは締結解除される。
【0045】
上記した実施の形態において、電動モータ11が正転あるいは逆転駆動されると、電動モータ11の回転は、第1の遊星ギヤ機構13の第1サンギヤ21に伝達される。同時に、電動モータ11の回転は、第2の遊星ギヤ機構17の第2サンギヤ31にトロイダル無段変速機15を介して伝達されるとともに、第2キャリヤ32に直接伝達される。
【0046】
通常時は、クラッチ機構18が締結されて、第1の遊星ギヤ機構13の第1リングギヤ22が固定状態に保持されているため、電動モータ11によって第1サンギヤ21が回転駆動されると、第1キャリヤ23に支持された第1遊星ギヤ24が第1リングギヤ22に噛合いながら公転運動され、第1キャリヤ23が所定の減速比で減速回転される。これにより、車輪駆動軸26を介して駆動車輪12が回転駆動され、車両が電動モータ11の回転数に応じた速度で前進あるいは後退走行される。
【0047】
一方、車両の直進走行時においては、電動モータ11の回転数に対し、第2の遊星ギヤ機構17のギヤ比により算出された適切な回転数を、第2サンギヤ31へ与えるべく、レバー14を適切な位置に保持することにより、第2リングギヤ33は静止状態に保持され、ステアリングシャフト41は回転されず、ステアリングギヤボックス16は中立状態に保持されている。
【0048】
しかる状態で、ステアリングホイール42が、例えば右回りに回転操作されると、これがステアリングセンサ46によって検出され、ステアリングセンサ46の出力信号に基づいて電動アクチュエータ48が、レバー14を前述の直進走行時の位置からポジションB方向に作動させる。かかるレバー14のポジションAからポジションB方向への作動により、トロイダル無段変速機15のバリエータ37が図3の反時計回りに回動され、トロイダル無段変速機15の入力軸35の回転が出力軸36に変速(減速)して伝えられる。
【0049】
これによって、第2の遊星ギヤ機構17の第2サンギヤ31の回転数が、第2キャリヤ32の回転数より低くなるため、第2サンギヤ31と第2キャリヤ32との回転差によって方向変換ギヤ40が一方向に回動され、ステアリングギヤボックス16のタイロッド44a、44bを介して操舵車輪43が右方向に転舵される。
【0050】
反対に、ステアリングホイール42が、左回りに回転操作されると、ステアリングセンサ46の出力信号に基づいて電動アクチュエータ48が、前記と反対に、レバー14を前述の直進走行時の位置からポジションC方向に作動させる。かかるレバー14のポジションAからポジションC方向への作動により、トロイダル無段変速機15のバリエータ37が図3の反時計回りに回動され、トロイダル無段変速機15の入力軸35の回転が出力軸36に増速して伝えられる。
【0051】
これによって、第2の遊星ギヤ機構17の第2サンギヤ31の回転数が、第2キャリヤ32の回転数より高くなるため、第2サンギヤ31と第2キャリヤ32との回転差によって方向変換ギヤ40が前記と逆方向に回動され、ステアリングギヤボックス16のタイロッド44a、44bを介して操舵車輪43が左方向に転舵される。
【0052】
ただし、上記した本例では、レバー14のポジションBへの作動により右方向に転舵、レバー14のポジションCへの作動により左方向に転舵されると記したが、方向変換ギヤ40の構成、ステアリングギヤボックス16の内部構成により、それぞれ逆方向に転舵される場合もある。
【0053】
ところで、車両の停止状態において、クラッチ機構18の締結を解除することにより、第1の遊星ギヤ機構13の第1リングギヤ22がフリーで回転できるように制御される。従って、ステアリングホイール42の操作に基づいて、電動モータ11が駆動され、第1の遊星ギヤ機構13の第1サンギヤ21が回転駆動されても、第1リングギヤ22の回転によって、第1キャリヤ23は回転することなく、駆動車輪12を静止状態に保持することができ、据切操舵が可能となる。
【0054】
次に、上記した実施の形態における車両の駆動および操舵の動作を、図9のフローチャートに基づいて説明する。かかるフローチャートはイグニッションスイッチがONされることに基づいて実行される。
【0055】
まず、ステップ100において、ECU50のメモリに記憶された変数をイニシャライジング(初期化)し、次いでステップ102で、ECU50に入力された車速SPDが読込まれる。ステップ104では、車速SPDが0であるか否かが判別され、0(YES)である場合には、ステップ112に移行してクラッチ機構18がフリー回転できるように制御される。すなわち、車速が0の場合には、図6に示すクラッチ制御手段30のクラッチ制御バルブ62が開口制御され、第1のリングギヤ22がフリーに回転できるように、クラッチ機構18の多板クラッチ28の締結が解除され、後述するステップ120に移行される。
【0056】
ステップ104における判別結果がNOの場合には、ステップ106において、ECU50に入力されたアクセル開度ACCが読込まれ、続くステップ108において、アクセル開度ACCが0であるか否かが判別され、0(YES)である場合には、上記したステップ112に移行して、第1のリングギヤ22がフリーに回転できるように、クラッチ機構18の多板クラッチ28の締結が解除される。ステップ108における判別結果がNOの場合には、ステップ110に移行され、クラッチ機構18が締結される。すなわち、クラッチ制御手段30のクラッチ制御バルブ62が閉止制御されて、多板クラッチ28が締結され、第1の遊星ギヤ機構13の第1のリングギヤ22が静止状態に固定される。
【0057】
次いで、ステップ114において、電動モータ11の目標回転数がアクセル開度ACCに応じて算出され、ステップ116では、電動モータ11の回転数が算出された目標回転数に近づく方向に回転制御される。続いて、ステップ118では、電動モータ11の実回転数が、ステップ112で算出された目標回転数に等しくなったか否かが判別され、NOの場合には、ステップ116に戻って電動モータ11の回転制御が続行される。電動モータ11の実回転数が目標回転数に等しくなると、ステップ118における判別結果がYESとなり、ステップ120に進む。
【0058】
このように、電動モータ11がアクセル開度ACCに応じた目標回転数に回転制御されることにより、電動モータ11の回転が第1の遊星ギヤ機構13によって減速回転される駆動車輪12も、アクセル開度ACCに応じた回転数(回転速度)で駆動され、車両はアクセル開度に応じた速度で走行される。すなわち、電動モータ11によって第1のサンギヤ21が回転されると、第1のキャリヤ23に支持された遊星ギヤ24が第1のリングギヤ22に噛合いながら公転運動されることにより、第1のキャリヤ23が所定の減速比で減速回転され、駆動車輪12が回転駆動されて、車両が電動モータ11の回転数に応じた速度で走行される。
【0059】
ところで、車両の走行中にステアリングホイール42が回転操作されると、ステアリングホイール42の操作量(操作角)がステアリングセンサ46によって検出され、ステップ120においてステアリングホイール42の操作量に応じた操舵角の目標値が読み込まれる。次いで、ステップ122においては、操舵角を目標値に制御するに必要な第2の遊星ギヤ機構17の第2サンギヤ31の回転数が推計される。続いて、ステップ124においては、ステップ122で推計された第2サンギヤ31の回転数を得るに必要な無段変速機15のレバー14の目標角が算出され、これに基づいてステップ126において、電動アクチュエータ48によりレバー14が目標角に制御される。
【0060】
これにより、レバー14によって無段変速機15のバリエータ37が回転され、バリエータ37の回転に応じた所定の増速比あるいは減速比で入力軸35の回転が出力軸36に伝達され、第2の遊星ギヤ機構17の第2サンギヤ31がステップ122で推計された回転数に回転制御される。
【0061】
従って、電動モータ11の回転が第2キャリヤ32に直接伝えられるのに対し、第2サンギヤ31が目標操舵角に応じた回転数に回転制御されることにより、無段変速機15の制御によって、第1サンギヤ31と第2キャリヤ32が異なる回転数で回転できるようになり、第2の遊星ギヤ機構17の第2リングギヤ33が、一方向(右方向)あるいはそれと反対方向(左方向)に回転される。
【0062】
このようにして、ステアリングホイール42の右方向(左方向)の回転操作により、第2の遊星ギヤ機構17の第2リングギヤ33が、一方向(他方向)に回転されると、方向変換ギヤ40を介してステアリングギヤボックス16が作動され、タイロッド44a、44bが一方向(他方向)に移動され、図略のナックルアームを介して操舵車輪43が右方向(左方向)に転舵される。
【0063】
操舵車輪43の実舵角は舵角センサ47によって検出され、ステップ128において、舵角センサ47によって検出された実舵角が、上記ステップ120で読み込まれた目標舵角に等しくなったか否かが判別され、判別結果がNOの場合には、ステップ126の処理が続行され、YESになると、ステップ102に戻って新たに車速が読み込まれ、上記した動作を繰り返す。
【0064】
なお、電動モータ11の回転数とトルクは逆数の関係となり、レバー14の角度位置に対する無段変速機15の入力軸35と出力軸36のトルクの関係は、図10に示すようになる。すなわち、図10においては、上記した図4とは逆に、レバー14をポジションAからポジションB方向に作動させると、出力軸36に伝達されるトルクは増大し、レバー14をポジションAからポジションC方向に作動させると、出力軸36に伝達されるトルクは減少する。
【0065】
従って、図9で述べたステップ114〜118において、電動モータ11の目標回転数を算出する代わりに、電動モータ11の目標トルクを算出して、その目標トルクに一致するまで電動モータ11を回転制御するようにしてもよい。
【0066】
上記した実施の形態によれば、車輪駆動ユニット200は、電動モータ11の回転を減速して駆動車輪12へ伝達する第1の遊星ギヤ機構13を備え、操舵機構210は、操舵に応じて電動モータ11の回転を増減速するトロイダル無段変速機15と、電動モータ11の回転動力がトロイダル無段変速機15を介して入力される第2サンギヤ31、電動モータ11の回転動力が直接入力される第2キャリヤ32および操舵車輪43に連結され操舵車輪43を操舵する第2リングギヤ33を有する第2の遊星ギヤ機構13とを備えている。
【0067】
この構成により、トロイダル無段変速機15によって電動モータ11の回転動力を第2の遊星ギヤ機構17の第2サンギヤ31に増速あるいは減速して伝達することができるので、1つの電動モータ11によって駆動車輪12を駆動する駆動力と、操舵車輪43を操舵する操舵力を自在に制御することができる。しかも、無段変速機15によって電動モータ11の回転動力を第2の遊星ギヤ機構17の第2サンギヤ31に増速あるいは減速して伝達することができるので、走行状態によって正逆転方向に回転される電動モータ11の回転方向に拘らず、操舵車輪43を左右に操舵することができ、車両用駆動操舵アクチュエータ10を低コストで実現することができるとともに、少ない電力消費で車輪操舵を可能にすることができる。
【0068】
さらには、トロイダル無段変速機15のバリエータ37をレバー等によって回動するだけの簡単な構成により、操舵車輪43を左右に操舵することができるので、車両用駆動操舵アクチュエータ10を低コストで実現することができるとともに、少ない電力消費で操舵車輪43の操舵を可能にすることができる。
【0069】
また、上記した実施の形態によれば、第1遊星ギヤ機構13の第1リングギヤ22の回転を自由状態にしたり、固定したりするクラッチ機構14と、第1リングギヤ22の回転を自由にするべくクラッチ機構14を制御するクラッチ制御手段30を設けたので、駆動車輪12を停止した状態で、電動モータ11を駆動して操舵車輪43を据切操舵することができる。
【0070】
上記した実施の形態においては、無段変速機15としてトロイダル無段変速機を用いた例について述べたが、本発明は、トロイダル無段変速機15に限定されるものではなく、例えば、直径が変化する2つのプーリにベルトを通したベルト式CVT等の無段変速機を用いてもよい。
【0071】
また、上記した実施の形態においては、第2の遊星ギヤ機構17の第2サンギヤ31に無段変速機15を介して電動モータ11を連結し、第2キャリヤ32に電動モータ11を直接連結し、第2リングギヤ33をステアリングギヤボックス16に連結したが、第2の遊星ギヤ機構17の第2サンギヤ31、第2キャリヤ32および第2リングギヤ33のうちの何れか2つを、電動モータ11の回転動力が入力される入力部とし、残りの1つを操舵車輪43を操舵するための出力部としてもよい。
【0072】
さらに、上記した実施の形態においては、本発明の車両用駆動操舵アクチュエータ10を、ステアバイワイヤ式の操舵ユニット211に用いた例について述べたが、本発明は、ステアバイワイヤ式の操舵ユニット211に限定されるものではなく、ステアリングホイール42と操舵車輪43とを機械的に連結した構成の操舵ユニットにも適用可能である。
【0073】
斯様に、本発明は上記した実施の形態に限定されることなく、特許請求の範囲に記載した本発明の主旨を逸脱しない範囲内で種々の変形が可能であることは勿論である。
【産業上の利用可能性】
【0074】
本発明に係る車両用駆動操舵アクチュエータは、電動モータによって作動される車輪駆動ユニットと操舵機構を備えた車両に用いるのに適している。
【符号の説明】
【0075】
10…車両用駆動操舵システム、11…電動モータ、12…駆動車輪、13…第1の遊星ギヤ機構、14…コントロールレバー、15…トロイダル無段変速機、16…ステアリングギヤボックス、17…第2の遊星ギヤ機構、18…クラッチ機構、21…第1サンギヤ、22…第1リングギヤ、23…第1キャリヤ、24…第1遊星ギヤ、25…出力軸、26…車輪駆動軸、31…第2サンギヤ、32…第2キャリヤ、33…第2リングギヤ、34…第2遊星ギヤ、35…入力軸、36…出力軸、37…バリエータ、41…ステアリングシャフト、42…ステアリングホイール、43…操舵車輪、46…ステアリングセンサ、48…電動駆動手段(電動アクチュエータ)、200…車輪駆動ユニット、210…操舵機構、211…操舵ユニット。
【特許請求の範囲】
【請求項1】
電動モータと、該電動モータの回転によって、車輪を駆動する車輪駆動ユニットと、車輪を操舵する操舵機構とを備えた車両用駆動操舵アクチュエータであって、
前記車輪駆動ユニットは、前記電動モータの回転を減速して前記車輪へ伝達する第1の遊星ギヤ機構を備え、
前記操舵機構は、操舵に応じて前記電動モータの回転を増減速する無段変速機と、前記電動モータの回転動力が前記無段変速機を介して入力される第1入力部、前記電動モータの回転動力が直接入力される第2入力部および車輪に連結され当該車輪を操舵する出力部を有する第2の遊星ギヤ機構とを備えている、
ことを特徴とする車両用駆動操舵アクチュエータ。
【請求項2】
請求項1において、前記無段変速機は、トロイダル無段変速機により構成されていることを特徴とする車両用駆動操舵アクチュエータ。
【請求項3】
請求項1において、前記第1の遊星ギヤ機構は、第1サンギヤと第1キャリヤと第1リングギヤを備え、前記第1サンギヤが前記電動モータに連結され、前記第1キャリヤが前記車輪に連結されていることを特徴とする車両用駆動操舵アクチュエータ。
【請求項4】
請求項3において、前記第1リングギヤの回転を自由状態にしたり、固定したりするクラッチ機構と、前記第1リングギヤの回転を自由にするべく前記クラッチ機構を制御するクラッチ制御手段を設けたことを特徴とする車両用駆動操舵アクチュエータ。
【請求項5】
請求項1において、前記第2の遊星ギヤ機構は、第2サンギヤと第2キャリヤと第2リングギヤを備え、前記第2サンギヤが前記無段変速機を介して前記電動モータに連結され、前記第2キャリヤが前記電動モータに連結され、前記第2リングギヤがステアリングギヤボックスの入力側に連結されていることを特徴とする車両用駆動操舵アクチュエータ。
【請求項6】
請求項2において、前記トロイダル無段変速機のバリエータは、ステアリングホイールの回転を検出するステアリングセンサの出力に応じて作動される電動駆動手段によって回動されることを特徴とする車両用駆動操舵アクチュエータ。
【請求項1】
電動モータと、該電動モータの回転によって、車輪を駆動する車輪駆動ユニットと、車輪を操舵する操舵機構とを備えた車両用駆動操舵アクチュエータであって、
前記車輪駆動ユニットは、前記電動モータの回転を減速して前記車輪へ伝達する第1の遊星ギヤ機構を備え、
前記操舵機構は、操舵に応じて前記電動モータの回転を増減速する無段変速機と、前記電動モータの回転動力が前記無段変速機を介して入力される第1入力部、前記電動モータの回転動力が直接入力される第2入力部および車輪に連結され当該車輪を操舵する出力部を有する第2の遊星ギヤ機構とを備えている、
ことを特徴とする車両用駆動操舵アクチュエータ。
【請求項2】
請求項1において、前記無段変速機は、トロイダル無段変速機により構成されていることを特徴とする車両用駆動操舵アクチュエータ。
【請求項3】
請求項1において、前記第1の遊星ギヤ機構は、第1サンギヤと第1キャリヤと第1リングギヤを備え、前記第1サンギヤが前記電動モータに連結され、前記第1キャリヤが前記車輪に連結されていることを特徴とする車両用駆動操舵アクチュエータ。
【請求項4】
請求項3において、前記第1リングギヤの回転を自由状態にしたり、固定したりするクラッチ機構と、前記第1リングギヤの回転を自由にするべく前記クラッチ機構を制御するクラッチ制御手段を設けたことを特徴とする車両用駆動操舵アクチュエータ。
【請求項5】
請求項1において、前記第2の遊星ギヤ機構は、第2サンギヤと第2キャリヤと第2リングギヤを備え、前記第2サンギヤが前記無段変速機を介して前記電動モータに連結され、前記第2キャリヤが前記電動モータに連結され、前記第2リングギヤがステアリングギヤボックスの入力側に連結されていることを特徴とする車両用駆動操舵アクチュエータ。
【請求項6】
請求項2において、前記トロイダル無段変速機のバリエータは、ステアリングホイールの回転を検出するステアリングセンサの出力に応じて作動される電動駆動手段によって回動されることを特徴とする車両用駆動操舵アクチュエータ。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【公開番号】特開2012−158311(P2012−158311A)
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願番号】特願2011−21296(P2011−21296)
【出願日】平成23年2月3日(2011.2.3)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
【公開日】平成24年8月23日(2012.8.23)
【国際特許分類】
【出願日】平成23年2月3日(2011.2.3)
【出願人】(000000011)アイシン精機株式会社 (5,421)
【Fターム(参考)】
[ Back to top ]