
車両用駆動装置の制御方法および制御装置
【課題】 減速回生時のショックの発生を抑制する。
【解決手段】 エンジン12と、エンジン12に連結された第1モータ14と、エンジン12及び第1モータ14と駆動輪34とを断続する第1断続手段18と、エンジン12に並列に配置された第2モータ20と、第2モータ20と駆動輪34とを断続する第2断続手段24とを有する車両用駆動装置の制御方法であって、減速時において、第1断続手段18を締結し、第2断続手段24を解放して、第1モータ14による回生状態から、第1断続手段18を解放し、第2断続手段24を締結して、第2モータ20による回生状態に切り換えるときに、第1断続手段18を解放する前に第2断続手段24を締結し、その状態で、第1モータ14による回生量を減少させつつ第2モータ20による回生量を増大させる。そして、回生を行うモータが第1モータ14から第2モータ20に移行した後、第1断続手段18を解放する。
【解決手段】 エンジン12と、エンジン12に連結された第1モータ14と、エンジン12及び第1モータ14と駆動輪34とを断続する第1断続手段18と、エンジン12に並列に配置された第2モータ20と、第2モータ20と駆動輪34とを断続する第2断続手段24とを有する車両用駆動装置の制御方法であって、減速時において、第1断続手段18を締結し、第2断続手段24を解放して、第1モータ14による回生状態から、第1断続手段18を解放し、第2断続手段24を締結して、第2モータ20による回生状態に切り換えるときに、第1断続手段18を解放する前に第2断続手段24を締結し、その状態で、第1モータ14による回生量を減少させつつ第2モータ20による回生量を増大させる。そして、回生を行うモータが第1モータ14から第2モータ20に移行した後、第1断続手段18を解放する。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、モータを備えた車両用駆動装置の制御装置に関し、自動車の駆動技術の分野に属する。
【背景技術】
【0002】
従来より、駆動源としてモータとエンジンとを搭載し、選択的にいずれかを用いることにより駆動輪を駆動する、いわゆるシリーズパラレルハイブリッド車両が知られている。具体的には、このようなハイブリッド車両は、例えば特許文献1に記載されているように、エンジンと、該エンジンに連結された第1モータと、該エンジン及び第1モータと駆動輪との間を断続する第1断続手段と、エンジンに並列に配置された第2モータと、該第2モータと駆動輪との間を断続する第2断続手段とを有する。
【0003】
そして、低負荷低車速領域では第1断続手段を解放し(動力非伝達状態に)、第2断続手段を締結(動力伝達状態に)して第2モータで駆動輪を駆動し、高負荷領域および高車速領域では第1断続手段を締結し、第2断続手段を解放してエンジンで駆動輪を駆動する。なお、エンジンで駆動輪を駆動しているとき、該エンジンのスタータとして使用される第1モータが補助的に駆動輪を駆動する、すなわち第1モータがエンジンをアシストするために作動するハイブリッド車両も存在する。
【0004】
また、このようなハイブリッド車両の場合、減速時、高車速領域では第1断続手段を締結し、第2断続手段を解放して、第1モータを発電機として作動させることにより該第1モータでエネルギの回生を行い、低車速領域では第1断続手段を解放し、第2断続手段を締結して、第2モータを発電機として作動させることにより該第2モータでエネルギの回生を行う。そして、回生電力を、モータが駆動源として作動しているときに該モータに電力を供給するバッテリに充電する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−335190号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、上述に記載するように、減速回生を第1モータから第2モータに切り換えて実行する場合、高車速領域から低車速領域への移行の際、第1断続手段を締結状態から解放状態にするタイミング、第1モータの回生制御(発電機として作動させる制御)の停止のタイミング、第2断続手段を解放状態から締結状態にするタイミング、および第2モータの回生制御の開始のタイミングをどのように制御するかが課題となる。
【0007】
例えば、第1断続手段を解放して第1モータの回生制御を停止させるタイミングに対して、第2断続手段を締結して第2モータの回生制御を開始するタイミングが遅れると、その遅れた間だけ駆動輪を減速させる減速トルクが消滅して、車両の空走状態が発生する。これとは逆に、前者のタイミングに対して後者のタイミングが早すぎると、一時的に両モータとも発電状態となり、両モータの発電抵抗トルクにより減速トルクが増加して、車両にショックが発生する。
【0008】
そこで、本発明は、エンジンと、該エンジンに連結された第1モータと、該エンジン及び第1モータと駆動輪との間を断続する第1断続手段と、エンジンに並列に配置された第2モータと、該第2モータと駆動輪との間を断続する第2断続手段とを有するハイブリッド車両において、減速回生を第1モータから第2モータに切り換えて実行する際に起こる車両の空走状態やショックの発生を抑制することができる車両用駆動装置の制御方法および制御装置を提供することを課題とする。
【課題を解決するための手段】
【0009】
上述の課題を解決するために、請求項1に記載の発明は、エンジンと、該エンジンに連結された第1モータと、該エンジン及び第1モータと駆動輪との間を断続する第1断続手段と、エンジンに並列に配置された第2モータと、該第2モータと駆動輪との間を断続する第2断続手段とを有する車両用駆動装置の制御方法であって、
減速時において、前記第1断続手段を締結し、第2断続手段を解放して、第1モータで回生を行っている状態から、第1断続手段を解放し、第2断続手段を締結して、第2モータで回生を行う状態に切り換えるときに、
前記第1断続手段を解放する前に第2断続手段を締結する第1ステップと、
前記第1ステップにより両断続手段が締結されている状態で、第1モータによる回生量を減少させつつ第2モータによる回生量を増大させる第2ステップと、
前記第2ステップにより回生を行うモータが第1モータから第2モータに移行した後、前記第1断続手段を解放する第3ステップとを実行することを特徴とする。
【0010】
また、請求項2に記載の発明は、請求項1に記載の車両用駆動装置の制御方法において、
前記第1ステップの実行前に、第2モータを駆動して第2断続手段の第2モータ側の回転速度を断続相手側の回転速度に同期させるステップを実行し、該ステップにより前記両側の回転速度が同期した状態で前記第1ステップを実行することを特徴とする。
【0011】
ここで、第2断続手段における断続相手側とは、該断続手段がクラッチで構成される場合は、第2モータ側の回転部材に対向する駆動輪側の回転部材であり、また、後述の実施形態で示すように、ブレーキを用いて構成される場合は、第2モータに連動して回転する回転部材を固定するための部材であり、この場合、該回転部材を停止させることにより両側の回転速度が同期する。
【0012】
さらに、請求項3に記載の発明は、請求項1または2に記載の車両用駆動装置の制御方法において、
前記第2ステップで、第1モータによる回生量を減少させるときに、該第1モータのトルクを回生側のトルクからエンジンの機械抵抗トルクと実質的に等しい大きさの駆動側のトルクまで増大させ、
前記第3ステップは、第1モータの駆動側のトルクがエンジンの機械抵抗トルクと実質的に等しくなった時点で実行することを特徴とする。
【0013】
一方、請求項4に記載の発明は、エンジンと、該エンジンに連結された第1モータと、該エンジン及び第1モータと駆動輪との間を断続する第1断続手段と、エンジンに並列に配置された第2モータと、該第2モータと駆動輪との間を断続する第2断続手段とを有する車両用駆動装置の制御装置であって、
車速を検出する車速検出手段と、
車両の減速時に前記車速検出手段によって車速が所定の回生制御切換速度まで低下したことが検出されたときに、前記第1断続手段を締結状態から解放状態に切り換え、第2断続手段を解放状態から締結状態に切り換えるとともに、第1モータで回生を行っている状態から第2モータで回生を行う状態に切り換える制御手段とが備えられ、
前記制御手段は、
第1モータで回生を行っている状態から第2モータで回生を行う状態に切り換えるときに、前記第1断続手段を解放する前に第2断続手段を締結し、両断続手段が締結している状態で、第1モータによる回生量を減少させつつ第2モータによる回生量を増大させることにより、回生を行うモータを第1モータから第2モータに移行させ、その後、前記第1断続手段を解放することを特徴とする。
【0014】
また、請求項5に記載の発明は、請求項4に記載の車両用駆動装置の制御装置において、
前記第2モータと第2断続手段との間に減速手段が配置されており、
前記第2断続手段と減速手段は、プラネタリギヤセットと、該プラネタリギヤセットの所定の回転要素を固定するブレーキとで構成され、該ブレーキが締結された状態で第2モータの回転を減速して駆動輪側に伝達し、該ブレーキが解放された状態で第2モータと駆動輪とを切り離すように構成されていることを特徴とする。
【0015】
さらに、請求項6に記載の発明は、請求項4または5に記載の車両用駆動装置の制御装置において、
前記エンジン及び第1モータと駆動輪との間を断続する第1断続手段は該エンジン及び第1モータと駆動輪との間に介設された自動変速機で構成され、
前記制御手段は、前記自動変速機をニュートラル状態とすることにより、エンジン及び第1モータと駆動輪とを切り離すことを特徴とする。
【発明の効果】
【0016】
請求項1に記載の発明によれば、減速時において、第1モータで回生している状態から第2モータで回生する状態に切り換わるときに、第1断続手段が解放される前に第2断続手段が締結され、両断続手段が締結されている状態で、第1モータによる回生量が次第に減少する一方、第2モータによる回生量が次第に増大して、回生を行うモータが第1モータから第2モータに移行される。そして、その後、第1断続手段が解放されるので、回生するモータが切り換わるにもかかわらず、回生に伴う減速トルクが急激に変化することがなくなり、該減速トルクが一時的に消滅して車両が空走状態になることや、減速トルクが急激に増加して車両にショックが発生することが抑制される。
【0017】
また、請求項2に記載の発明によれば、第2断続手段を締結する前に、すなわち第2モータと駆動輪とを接続する前に、第2モータを駆動して第2断続手段の第2モータ側の回転速度を断続相手側の回転速度に同期させる。これにより、ショックの発生を抑制しつつ、第2モータと駆動輪とを接続することができる。
【0018】
さらに、請求項3に記載の発明によれば、第1モータによる回生量を減少させるときに、該第1モータのトルクを回生側のトルクからエンジンの機械抵抗トルクと実質的に等しい大きさの駆動側のトルクまで増大させ、該第1モータの駆動側のトルクがエンジンの機械抵抗トルクと実質的に等しくなった時点、すなわちエンジンと第1モータとが抵抗となることによる減速トルクが実質的にゼロになった時点で、第1断続手段がエンジン及び第1モータと駆動輪とを切り離す。これにより、第1断続手段が締結状態から解放状態に切り換わるときの減速トルクの変化量が実質的にゼロになり、該第1断続手段の解放に伴うショックの発生が防止される。
【0019】
一方、請求項4に記載の発明によれば、減速時において、第1モータで回生している状態から第2モータで回生する状態に切り換わるときに、第1断続手段が解放される前に第2断続手段が締結され、両断続手段が締結されている状態で、第1モータによる回生量が次第に減少する一方、第2モータによる回生量が次第に増大して、回生を行うモータが第1モータから第2モータに移行される。そして、その後、第1断続手段が解放されるので、回生するモータが切り換わるにもかかわらず、回生に伴う減速トルクが急激に変化することがなくなり、該減速トルクが一時的に消滅して車両が空走状態になることや、減速トルクが急激に増加して車両にショックが発生することが抑制される。
【0020】
また、請求項5に記載の発明によれば、第2モータと第2断続手段との間にプラネタリギヤセットで構成された減速手段が設けられ、該第2断続手段がプラネタリギヤセットの所定の回転要素を固定するブレーキで構成される。これにより、簡単な構成で第2モータと駆動輪とを確実に切り離すことができる。
【0021】
具体的に言うと、第2断続手段をブレーキでなくクラッチで構成する場合、第2モータと駆動輪とを確実に切り離すために、第2断続手段は、締結油圧室内の残留作動油に遠心力が作用することにより起こる不作為の締結を防止するために遠心バランス室を設けた複雑な構成のクラッチでなければいけないが、ブレーキを用いて構成すれば、その必要がなくなり、構成が簡素化される。
【0022】
さらに、請求項6に記載の発明によれば、第1断続手段は、エンジン及び第1モータと駆動輪との間に介設された自動変速機で構成され、該自動変速機がニュートラル状態とされることにより、エンジン及び第1モータと駆動輪とが切り離される。したがって、エンジン及び第1モータと駆動輪との間に、これらを接続しまたは切り離す断続手段を設ける必要がなくなる。
【図面の簡単な説明】
【0023】
【図1】本発明の一実施形態に係るハイブリッド車両の概略的な構成図である。
【図2】減速機と第2断続手段の部分的断面図である。
【図3】制御系統を概略的に示す図である。
【図4】運転者に要求された減速度を決定するためのマップである。
【図5】要求された減速度に対するブレーキの種類を示す図である。
【図6】減速回生時における第1および第2モータのトルクを決定するためのフローを示す図である。
【図7】回生切り換えの制御のフローを示す図である。
【図8】図7に示すフローに対応するタイムチャートを示す図である。
【発明を実施するための形態】
【0024】
以下、本発明の実施の形態について説明する。
【0025】
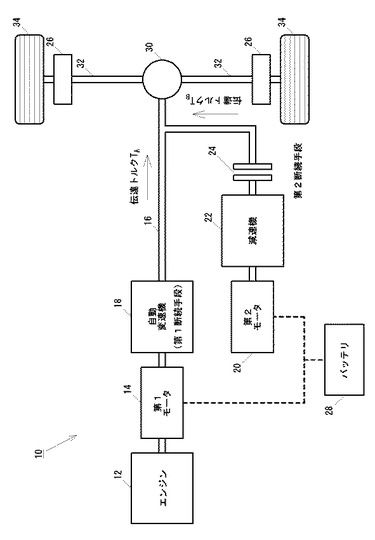
図1は本発明の一実施形態に係る、ハイブリッド車両の構成を簡略的に示している。図中において破線は、電力の流れを示している。
【0026】
図1に示すハイブリッド車両10は、一方の駆動源であるエンジン12と、エンジン12の出力軸に連結された第1モータ14と、入力軸がエンジン12の出力軸に連結されるとともに出力軸が駆動軸16に連結され、エンジン12と駆動軸16との間を断続する第1断続手段でもある自動変速機18と、他方の駆動源である第2モータ20と、モータ20の回転を減速する減速機22と、減速機22と駆動軸16との間を断続する第2断続手段24と、車両を停止させるためのホイールブレーキ26とを有する。また、第1モータ14と第2モータ20とに電力を供給するバッテリ28を有する。
【0027】
エンジン12は、駆動源として選択されたとき(例えば、走行状態に応じて車両制御装置が選択したとき、または運転者が駆動源として選択したとき)、自動変速機18、駆動軸16、差動装置30、車軸32と順に介して駆動輪34を駆動する。
【0028】
第1モータ14は、バッテリ28から電力の供給を受けてエンジン12をクランキングするスタータとして機能する。また、減速回生時(特にエンジンブレーキが使用される時)、駆動輪34により駆動軸16などを介して駆動されて発電し、バッテリ28を充電する。
【0029】
自動変速機18は、運転者が要求する変速段に応じてエンジン12の回転を、増速して、または減速して、若しくはそのまま駆動軸16に伝達する。また、第2モータ20が駆動源として選択されているときは、ニュートラル状態になり、エンジン12と駆動軸16とを切り離す、第1断続手段として機能する。
【0030】
第2モータ20は、駆動源として選択されたとき、バッテリ28から電力の供給を受けて、減速機22、締結状態(動力伝達状態)の第2断続手段24、駆動軸16、差動装置30、車軸32と順に介して駆動輪34を駆動する。また、減速回生時、駆動輪34により駆動軸16などを介して駆動されて発電し、バッテリ28を充電する。
【0031】
また、この第2モータ20は、減速機22、第2断続手段24と一体にされて、モータユニットとして構成されている。
【0032】
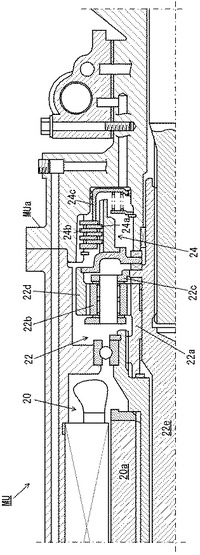
図2にモータユニットの部分断面図を示す。
【0033】
このモータユニットMUにおいて、減速機22は、サンギヤ22a、ピニオン22b、キャリア22c、およびリングギヤ22dからなるプラネタリギヤセットで構成されており、そのプラネタリギヤセットのサンギヤ22aが第2モータ20の回転子20aに連結されている。また、プラネタリギヤセットのキャリア22cは、減速機22の出力軸22eに連結されている。この出力軸22eは駆動軸16に連結されている。
【0034】
また、モータユニットMUにおいて、第2断続手段24は、油圧式のブレーキで構成されており、減速機22を構成するプラネタリギヤセットのリングギヤ22dとモータユニットハウジングMUaとを断続可能に連結する。
【0035】
第2モータ20が駆動源として選択されているときは、第2断続手段24を構成する油圧式ブレーキが油圧の供給を受けてリングギヤ22dをモータユニットハウジングMUaに締結する状態になり、第2モータ20の回転子20aに連結されたサンギヤ22aの回転がピニオン22bを介して減速されてキャリア22cに伝達され、このキャリア22cと連結された減速機22の出力軸22eが回転する。そして駆動輪34に回転が伝達される。
【0036】
一方、第2モータ20が駆動源として選択されていないときは(エンジン12が駆動源として選択されているときは)、第2断続手段24を構成する油圧式ブレーキがリングギヤ22dとモータユニットハウジングMUaとを切り離した状態になり、第2モータ20の回転子20aに連結されたサンギヤ22aの回転が、キャリア22cに伝達されずピニオン22bを介してリングギヤ22dに伝達される。そしてリングギヤ22dは空回転する。
【0037】
ここからは、本発明に係る、減速制御について説明する。
【0038】
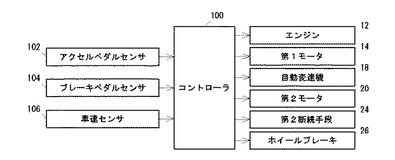
図3は、本発明に係る制御系統を概略的に示している。
【0039】
図に示すコントローラ100は、運転者が要求する減速を検出するためのアクセルペダルセンサ102およびブレーキペダルセンサ104と、ハイブリッド車両10の車速を検出する車速センサ106とからの検出信号に基づいて、減速に関連する制御を、エンジン12、第1モータ14、自動変速機18、第2モータ20、第2断続手段24、およびホイールブレーキ26に対して実行するように構成されている。
【0040】
まず、コントローラ100は、アクセルペダルの踏込量を検出するアクセルペダルセンサ102とブレーキペダルの踏込量を検出するブレーキペダルセンサ104とからの検出信号に基づいて、運転者が要求する、減速の開始やその減速度、また減速の終了を検出するように構成されている。
【0041】
具体的には、コントローラ100は、アクセルペダルセンサ102が検出したアクセルペダルの踏込量がゼロの場合に、運転者が減速の開始を要求していると判定し、その後のブレーキペダルセンサ104が検出するブレーキペダルの踏込量がゼロである場合は、運転者がエンジンブレーキによる減速を要求していると判定する。
【0042】
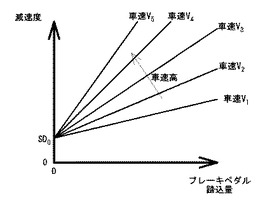
また、コントローラ100は、運転者が要求する減速度を、ブレーキペダルセンサ104が検出するブレーキペダルの踏込量と、車速センサ106が検出する車速と、予め作成された図4に示す減速度決定マップとに基づいて検出する。減速度は、図4に示すように、ブレーキペダルの踏込量が大きくなるほど、また、車速が高速になるほど大きくなる。
【0043】
要求された減速度で減速するために、コントローラ100が行う減速に関する制御は、減速が要求されたときの走行状態によって異なる。エンジンを駆動源として走行している場合、コントローラ100は、要求された減速度に応じて、エンジン12、第1モータ14、およびホイールブレーキ26を制御する。
【0044】
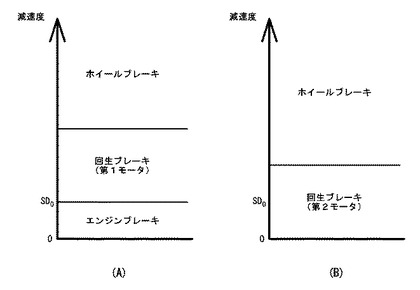
まず、図5(A)に示すように、要求された減速度がSD0より小さい場合、コントローラ100は、エンジン12を停止して(燃料の燃焼を停止して)、エンジンブレーキによる減速を実行する。なお、SD0は、図4に示すように、ブレーキペダルの踏込量がゼロのときの減速度である。
【0045】
要求減速度がSD0を超えている場合、コントローラ100は、エンジンブレーキに加え、第1モータ14を発電機として制御し、回生ブレーキによる減速を実行する。回生ブレーキ量は、第1モータ14の回生量(発電量)を変更することにより調整される。
【0046】
これより要求減速度が大きい場合、具体的に言えばエンジンブレーキと回生ブレーキとでは要求する減速度を達成できない場合、コントローラ100は、エンジンブレーキと回生ブレーキとに加え、ホイールブレーキ26を用いた減速を実行する。
【0047】
一方、第2モータ20を駆動源として走行している場合、コントローラ100は、要求された減速度に応じて、第2モータ20とホイールブレーキ26を制御する。
【0048】
図5(B)に示すように、コントローラ100は、第2モータ20を発電機として制御して回生ブレーキによる減速を実行し、この回生ブレーキのみで要求された減速度を達成できない場合は、これに加えてホイールブレーキ26を用いた減速を実行する。
【0049】
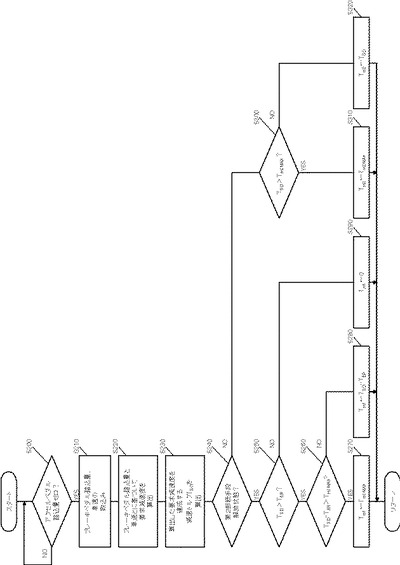
これらのことを踏まえた、第1モータ14と第2モータ20の回生量を決定するための制御の流れのフローの一例を図6に示す。このフローでは、回生量と対応する各モータのトルクを決定する。
【0050】
まず、図6に示すように、ステップS200において、コントローラ100は、アクセルペダルセンサ102からの検出信号に基づいて、アクセルペダルの踏込量がゼロか否かを判定する。アクセルペダルの踏込量がゼロであること、すなわち減速の開始が要求されたことを判定して、次のステップS210に進む。
【0051】
ステップS210において、コントローラ100は、ブレーキペダルセンサ104と車速センサ106とからの検出信号に基づいて、ブレーキペダルの踏込量と車速とを取込む。
【0052】
次に、ステップS220において、コントローラ100は、ステップ210で取込んだブレーキペダルの踏込量と車速、図4に示すマップに基づいて、運転者が要求する減速度を算出する。
【0053】
続いて、ステップS230において、コントローラ100は、ステップS220で算出した要求減速度を達成できる、駆動輪34を減速させる減速トルクTSDを算出する。
【0054】
ステップS240において、コントローラ100は、第2断続手段24が解放状態であるか否か、すなわち第2モータ20が選択されていないか否かを判定する。解放状態である場合、すなわち、第2モータ20でなくエンジン12が駆動源として選択されている場合、ステップS250に進む。そうでない場合、すなわち第2モータ20が駆動源として選択されている場合、ステップS300に進む。
【0055】
ステップS250において、コントローラ100は、エンジン12の機械抵抗トルクTERがステップS230で算出した減速トルクTSDより小さいか否かを判定する。小さい場合ステップS260に進む。そうでない場合ステップS290に進む。
【0056】
ステップS260において、コントローラ100は、第1モータ14が発生させることができる回生側(駆動輪34を減速させる側)の最大限界のトルクTm1MAXが、TSD−TERより小さいか否かを判定する。小さい場合、ステップS270に進む。そうでない場合ステップS280に進む。なお、Tm1MAXは、第1モータ14の仕様(能力)及びそのときのモータ回転速度によって決まっている。
【0057】
ステップS270において、コントローラ100は、第1モータ14に発生させるトルクTm1をTm1MAXに決定する。そして、リターンに進み、スタートに戻る。
【0058】
この場合、コントローラ100は、ステップS270を終了すると、エンジン12を停止してTERの機械抵抗トルクを発生させるとともに、Tm1MAXのトルクを発生するように第1モータ14を発電機として制御する。これに加えてホイルーブレーキ26を制御し、トータルとしてTSDの減速トルクを発生させて、すなわち要求された減速度で駆動輪32を減速する。
【0059】
一方、ステップS260でTm1MAXがTSD−TERより小さくないと判定した場合、ステップS280において、コントローラ100は、第1モータ14に発生させるトルクTm1をTSD−TERに決定する。そして、リターンに進み、スタートに戻る。
【0060】
この場合、コントローラ100は、ステップS280を終了すると、エンジン12を停止してTERの機械抵抗トルクを発生させるとともに、Tm1MAXのトルクを発生するように第1モータ14を発電機として制御する。これにより、トータルとしてTSDの減速トルクを発生させて、すなわち要求された減速度で駆動輪32を減速する。
【0061】
一方、ステップS250でTERがTSDより小さくないと判定した場合、ステップS290において、コントローラ100は、第1モータ14に発生させるトルクTm1をゼロに決定する。そして、リターンに進み、スタートに戻る。
【0062】
この場合、コントローラ100は、ステップS290を終了すると、エンジン12を停止してTERの機械抵抗トルクを発生させる。これにより、TSD(=TER)の減速トルクを発生させて、すなわち要求された減速度で駆動輪32を減速する。
【0063】
一方、ステップS240で第2断続手段24が解放状態でない、言い換えると第2モータ20が駆動源として選択されていると判定した場合、ステップS300において、コントローラ100は、第2モータ20が発生させることができる回生側(駆動輪34を減速させる側)の最大限界のトルクTm2MAXが、TSDより小さいか否かを判定する。小さい場合ステップS310に進む。そうでない場合ステップS320に進む。なお、Tm2MAXは、第2モータ20の仕様(能力)及びそのときのモータ回転速度によって決まっている。
【0064】
ステップS310において、コントローラ100は、第2モータ20に発生させるトルクTm2をTm2MAXに決定する。そして、リターンに進み、スタートに戻る。
【0065】
この場合、コントローラ100は、ステップS310を終了すると、Tm2MAXのトルクを発生するように第2モータ20を発電機として制御する。これに加えてホイルーブレーキ26を制御し、トータルとしてTSDの減速トルクを発生させて、すなわち要求された減速度で駆動輪32を減速する。
【0066】
一方、ステップS300でTm2MAXが、TSDより小さくないと判定した場合、ステップS320において、コントローラ100は、第2モータ20に発生させるトルクTm2をTSDに決定する。そして、リターンに進み、スタートに戻る。
【0067】
この場合、コントローラ100は、ステップS320を終了すると、TSDのトルクを発生するように第2モータ20を発電機として制御する。これにより、要求された減速度で駆動輪32を減速する。
【0068】
ここからは、本発明に係る、減速回生の切り換えについて説明する。
【0069】
コントローラ100は、第1モータ14の減速回生中に車速が所定車速に低下すると、減速回生のモータを第1モータ14から第2モータ20に切り換えるように構成されている。
【0070】
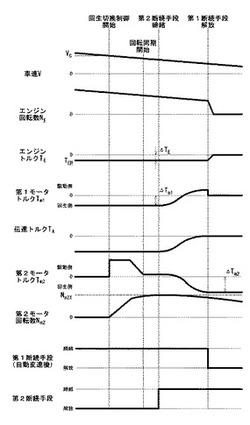
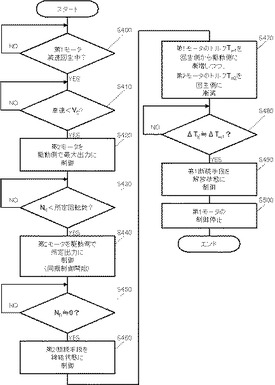
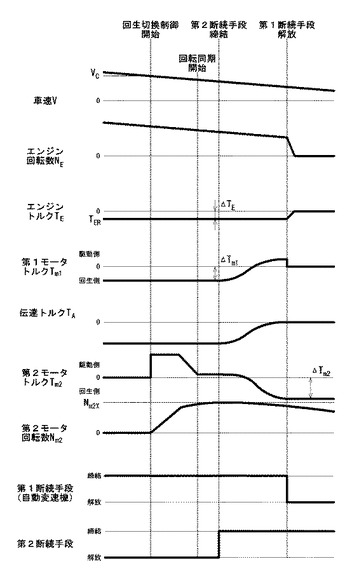
このことを、具体的に図7に示すフローと図8に示すタイムチャートとを用いて説明する。図7は回生切換制御の流れのフローを示し、図8は図7のフローに従うタイムチャートを示している。
【0071】
まず、コントローラ100は、第1モータ14による減速回生中に、車速センサ106が検出する車速が予め設定された所定車速VCに低下すると、回生切換制御を開始し、制御停止中の第2モータ20を駆動側で最大出力に制御する(図7のステップS400〜S420に対応。)。
【0072】
これにより、図8に示すように第2モータ20の回転数がゼロから急激に増加する。また、これに対応するように、図2に示す、減速機24を構成するプラネタリギヤセットのリングギヤ22の回転数NRが急激に減少する。
【0073】
具体的に説明すると、減速時において第2断続手段24である油圧式ブレーキが解放状態であるとき、すなわちリングギヤ22dがモータユニットハウジングMUaに締結されていないとき、該リングギヤ22dは、ピニオン22bを介して、駆動軸16に出力軸22eを介して連結されたキャリア22cにより回転されている。これに対してサンギヤ22aは回転しない。
【0074】
この状態で第2モータ20を駆動側に最大出力に制御してその回転子20aが回転し始めると、連結されているサンギヤ22aも回転し始める。そして、サンギヤ22aの回転数は急激に増加していき、これとは反対にリングギヤ22dの回転数NRは急激に減少していく。
【0075】
リングギヤ22dの回転数NRが所定回転数より小さくなると、コントローラ100は、回転同期制御を開始し、第2モータ20を駆動側で所定出力(最大出力より小さい出力)に制御する(図7のステップS430〜S440に対応。)。これにより、図8に示すように第2モータ20の回転数の増加が緩やかにされる。なお、リングギヤ22dの回転数NRは、車速センサ106が検出する車速(すなわち、キャリア22cの回転数)と、ピニオン22bとリングギヤ22dの歯数から算出することができる。
【0076】
なお、ここでいう回転同期制御は、第2モータ20の回転数を、その回転数と駆動軸16の回転数との比が減速機22の減速比になるように制御することであり、具体的には、リングギヤ22dの回転数NRがゼロになるように制御することである。
【0077】
リングギヤ22dの回転数NRが略ゼロになると(第2モータ20の回転数Nm2が対応するNm2xになると)、コントローラ100は、第2断続手段24を構成する油圧式ブレーキを締結状態に制御して、減速機24と駆動軸16とを接続する(図7のステップS450〜S460に対応。)。図2を用いて言えば、リングギヤ22d側に支持されている摩擦板24aの回転数が、モータユニットハウジングMUaに支持されている摩擦板24bの回転数と略同一のゼロになったときに、複数の摩擦板24a、24bをピストン22cにより締結方向に押圧する。
【0078】
この回転同期制御により、第2断続手段24を構成する油圧式ブレーキが締結するときのショックの発生を抑制しつつ、第2モータ20と駆動軸16とを接続することが可能になる。
【0079】
第2断続手段24を締結状態に制御すると、このとき第1断続手段18(自動変速機)も締結状態にあるので、図8に示すように、両方の断続手段が締結状態にあることになる。したがって、コントローラ100は、第2断続手段24の締結と同時に、第2モータ20をそのトルクTm2が回生側に急激に減少するように制御するのではなく(言い換えると急激に回生量を増加させるように制御するのではなく)、トルクTm2が漸減するように(回生量が漸増するように)制御する。これは、第2断続手段24の締結と同時に第2モータ20のトルクTm2を回生側に急激に減少させると(回生量を急激に増加すると)、第1断続手段18が締結状態にあってエンジン12および第1モータ14が駆動軸16に接続されている状態においては、減速トルクが急激に増加し、それによりハイブリッド車両10にショックが発生することがあるからである。
【0080】
この第2モータ20のトルクTm2を回生側に漸減させる制御と並行して、コントローラ100は、第1モータ14のトルクTm1を回生側から駆動側に漸増させる制御(回生量を漸減させる制御)も実行する(図7のステップS470。)。具体的には、トータルとしての回生量が略一定になるように制御する。それにより、回生に伴う減速トルクが急激に変化しないようにしている。
【0081】
第1モータ14のトルクTm1が駆動側に漸増して、そのトルクの大きさがエンジン12の機械抵抗トルクTERの大きさΔTEと実質的に等しくなると、コントローラ100は、第1断続手段18を解放状態に制御する、すなわち自動変速機18をニュートラル状態に制御する(図7のステップS480〜S490。)。
【0082】
すなわち、図1に示すエンジン12と駆動輪34との間の伝達トルクTAが、図8に示すように実質的にゼロになると略同時に、言い換えるとエンジン12と第1モータ14とが抵抗となることによる減速トルクが実質的にゼロになると略同時に、第1断続手段18がエンジン12および第1モータ14と駆動軸16とを切り離す。
【0083】
これにより、第1断続手段18が締結状態から解放状態に切り換わるときの減速トルクの変化量が実質的にゼロになり、該第1断続手段の18解放(自動変速機18のニュートラル状態への移行)に伴うショックの発生が防止される。
【0084】
第1断続手段18を解放状態に制御すると、コントローラ100は、第1モータ14の制御を停止する(図7のステップS500。)。これにより、回生切換制御が終了する。
【0085】
本実施形態によれば、減速時において、第1モータ14で回生している状態から第2モータ20で回生する状態に切り換わるときに、第1断続手段18が解放される前に第2断続手段24が締結され、両断続手段18、24が締結されている状態で、第1モータ14による回生量が次第に減少する一方、第2モータ20による回生量が次第に増大して、回生を行うモータが第1モータ14から第2モータ20に移行される。そして、その後、第1断続手段18が解放されるので、回生するモータが切り換わるにもかかわらず、回生に伴う減速トルクが急激に変化することがなくなり、該減速トルクが一時的に消滅して車両が空走状態になることや、減速トルクが急激に増加して車両にショックが発生することが抑制される。
【0086】
以上、上述の実施形態を挙げて本発明を説明したが、本発明はこれに限定されない。
【0087】
上述の実施形態の場合、第2断続手段24はブレーキで構成されているが、クラッチで構成してもよい。ただし、第2断続手段をブレーキでなくクラッチで構成する場合、第2モータと駆動軸とを確実に切り離すために、第2断続手段は、締結油圧室内の残留作動油に遠心力が作用することにより起こる不作為の締結を防止するために遠心バランス室を設けた複雑な構成のクラッチでなければいけない(上述の実施形態のようにブレーキを用いて第2手段を構成する方が、その構成が簡素で済む。)。
【0088】
また、上述の実施形態の場合、第1断続手段18は自動変速機で構成されているがこれに限らない。自動変速機の代わりに、エンジン及び第1モータと駆動輪との間に、これらを接続しまたは切り離す断続手段を設けてもよい。ただし、この間に自動変速機が配置されている場合は、自動変速機をニュートラル状態にして断続手段として機能させる方が、駆動系統の構成が簡素化されて好ましい。
【産業上の利用可能性】
【0089】
以上のように、本発明は、エンジンと、該エンジンに連結された第1モータと、該エンジン及び第1モータと駆動輪との間を断続する第1断続手段と、エンジンに並列に配置された第2モータと、該第2モータと駆動輪との間を断続する第2断続手段とを有するハイブリッド車両において、減速回生を第1モータから第2モータに切り換えて実行する際に起こる車両の空走状態やショックの発生を抑制することができる。したがって、モータを駆動源とする車両の分野において好適に利用される可能性がある。
【符号の説明】
【0090】
12 エンジン
14 第1モータ
18 第1断続手段(自動変速機)
20 第2モータ
24 第2断続手段(ブレーキ)
34 駆動輪
【技術分野】
【0001】
本発明は、モータを備えた車両用駆動装置の制御装置に関し、自動車の駆動技術の分野に属する。
【背景技術】
【0002】
従来より、駆動源としてモータとエンジンとを搭載し、選択的にいずれかを用いることにより駆動輪を駆動する、いわゆるシリーズパラレルハイブリッド車両が知られている。具体的には、このようなハイブリッド車両は、例えば特許文献1に記載されているように、エンジンと、該エンジンに連結された第1モータと、該エンジン及び第1モータと駆動輪との間を断続する第1断続手段と、エンジンに並列に配置された第2モータと、該第2モータと駆動輪との間を断続する第2断続手段とを有する。
【0003】
そして、低負荷低車速領域では第1断続手段を解放し(動力非伝達状態に)、第2断続手段を締結(動力伝達状態に)して第2モータで駆動輪を駆動し、高負荷領域および高車速領域では第1断続手段を締結し、第2断続手段を解放してエンジンで駆動輪を駆動する。なお、エンジンで駆動輪を駆動しているとき、該エンジンのスタータとして使用される第1モータが補助的に駆動輪を駆動する、すなわち第1モータがエンジンをアシストするために作動するハイブリッド車両も存在する。
【0004】
また、このようなハイブリッド車両の場合、減速時、高車速領域では第1断続手段を締結し、第2断続手段を解放して、第1モータを発電機として作動させることにより該第1モータでエネルギの回生を行い、低車速領域では第1断続手段を解放し、第2断続手段を締結して、第2モータを発電機として作動させることにより該第2モータでエネルギの回生を行う。そして、回生電力を、モータが駆動源として作動しているときに該モータに電力を供給するバッテリに充電する。
【先行技術文献】
【特許文献】
【0005】
【特許文献1】特開2006−335190号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、上述に記載するように、減速回生を第1モータから第2モータに切り換えて実行する場合、高車速領域から低車速領域への移行の際、第1断続手段を締結状態から解放状態にするタイミング、第1モータの回生制御(発電機として作動させる制御)の停止のタイミング、第2断続手段を解放状態から締結状態にするタイミング、および第2モータの回生制御の開始のタイミングをどのように制御するかが課題となる。
【0007】
例えば、第1断続手段を解放して第1モータの回生制御を停止させるタイミングに対して、第2断続手段を締結して第2モータの回生制御を開始するタイミングが遅れると、その遅れた間だけ駆動輪を減速させる減速トルクが消滅して、車両の空走状態が発生する。これとは逆に、前者のタイミングに対して後者のタイミングが早すぎると、一時的に両モータとも発電状態となり、両モータの発電抵抗トルクにより減速トルクが増加して、車両にショックが発生する。
【0008】
そこで、本発明は、エンジンと、該エンジンに連結された第1モータと、該エンジン及び第1モータと駆動輪との間を断続する第1断続手段と、エンジンに並列に配置された第2モータと、該第2モータと駆動輪との間を断続する第2断続手段とを有するハイブリッド車両において、減速回生を第1モータから第2モータに切り換えて実行する際に起こる車両の空走状態やショックの発生を抑制することができる車両用駆動装置の制御方法および制御装置を提供することを課題とする。
【課題を解決するための手段】
【0009】
上述の課題を解決するために、請求項1に記載の発明は、エンジンと、該エンジンに連結された第1モータと、該エンジン及び第1モータと駆動輪との間を断続する第1断続手段と、エンジンに並列に配置された第2モータと、該第2モータと駆動輪との間を断続する第2断続手段とを有する車両用駆動装置の制御方法であって、
減速時において、前記第1断続手段を締結し、第2断続手段を解放して、第1モータで回生を行っている状態から、第1断続手段を解放し、第2断続手段を締結して、第2モータで回生を行う状態に切り換えるときに、
前記第1断続手段を解放する前に第2断続手段を締結する第1ステップと、
前記第1ステップにより両断続手段が締結されている状態で、第1モータによる回生量を減少させつつ第2モータによる回生量を増大させる第2ステップと、
前記第2ステップにより回生を行うモータが第1モータから第2モータに移行した後、前記第1断続手段を解放する第3ステップとを実行することを特徴とする。
【0010】
また、請求項2に記載の発明は、請求項1に記載の車両用駆動装置の制御方法において、
前記第1ステップの実行前に、第2モータを駆動して第2断続手段の第2モータ側の回転速度を断続相手側の回転速度に同期させるステップを実行し、該ステップにより前記両側の回転速度が同期した状態で前記第1ステップを実行することを特徴とする。
【0011】
ここで、第2断続手段における断続相手側とは、該断続手段がクラッチで構成される場合は、第2モータ側の回転部材に対向する駆動輪側の回転部材であり、また、後述の実施形態で示すように、ブレーキを用いて構成される場合は、第2モータに連動して回転する回転部材を固定するための部材であり、この場合、該回転部材を停止させることにより両側の回転速度が同期する。
【0012】
さらに、請求項3に記載の発明は、請求項1または2に記載の車両用駆動装置の制御方法において、
前記第2ステップで、第1モータによる回生量を減少させるときに、該第1モータのトルクを回生側のトルクからエンジンの機械抵抗トルクと実質的に等しい大きさの駆動側のトルクまで増大させ、
前記第3ステップは、第1モータの駆動側のトルクがエンジンの機械抵抗トルクと実質的に等しくなった時点で実行することを特徴とする。
【0013】
一方、請求項4に記載の発明は、エンジンと、該エンジンに連結された第1モータと、該エンジン及び第1モータと駆動輪との間を断続する第1断続手段と、エンジンに並列に配置された第2モータと、該第2モータと駆動輪との間を断続する第2断続手段とを有する車両用駆動装置の制御装置であって、
車速を検出する車速検出手段と、
車両の減速時に前記車速検出手段によって車速が所定の回生制御切換速度まで低下したことが検出されたときに、前記第1断続手段を締結状態から解放状態に切り換え、第2断続手段を解放状態から締結状態に切り換えるとともに、第1モータで回生を行っている状態から第2モータで回生を行う状態に切り換える制御手段とが備えられ、
前記制御手段は、
第1モータで回生を行っている状態から第2モータで回生を行う状態に切り換えるときに、前記第1断続手段を解放する前に第2断続手段を締結し、両断続手段が締結している状態で、第1モータによる回生量を減少させつつ第2モータによる回生量を増大させることにより、回生を行うモータを第1モータから第2モータに移行させ、その後、前記第1断続手段を解放することを特徴とする。
【0014】
また、請求項5に記載の発明は、請求項4に記載の車両用駆動装置の制御装置において、
前記第2モータと第2断続手段との間に減速手段が配置されており、
前記第2断続手段と減速手段は、プラネタリギヤセットと、該プラネタリギヤセットの所定の回転要素を固定するブレーキとで構成され、該ブレーキが締結された状態で第2モータの回転を減速して駆動輪側に伝達し、該ブレーキが解放された状態で第2モータと駆動輪とを切り離すように構成されていることを特徴とする。
【0015】
さらに、請求項6に記載の発明は、請求項4または5に記載の車両用駆動装置の制御装置において、
前記エンジン及び第1モータと駆動輪との間を断続する第1断続手段は該エンジン及び第1モータと駆動輪との間に介設された自動変速機で構成され、
前記制御手段は、前記自動変速機をニュートラル状態とすることにより、エンジン及び第1モータと駆動輪とを切り離すことを特徴とする。
【発明の効果】
【0016】
請求項1に記載の発明によれば、減速時において、第1モータで回生している状態から第2モータで回生する状態に切り換わるときに、第1断続手段が解放される前に第2断続手段が締結され、両断続手段が締結されている状態で、第1モータによる回生量が次第に減少する一方、第2モータによる回生量が次第に増大して、回生を行うモータが第1モータから第2モータに移行される。そして、その後、第1断続手段が解放されるので、回生するモータが切り換わるにもかかわらず、回生に伴う減速トルクが急激に変化することがなくなり、該減速トルクが一時的に消滅して車両が空走状態になることや、減速トルクが急激に増加して車両にショックが発生することが抑制される。
【0017】
また、請求項2に記載の発明によれば、第2断続手段を締結する前に、すなわち第2モータと駆動輪とを接続する前に、第2モータを駆動して第2断続手段の第2モータ側の回転速度を断続相手側の回転速度に同期させる。これにより、ショックの発生を抑制しつつ、第2モータと駆動輪とを接続することができる。
【0018】
さらに、請求項3に記載の発明によれば、第1モータによる回生量を減少させるときに、該第1モータのトルクを回生側のトルクからエンジンの機械抵抗トルクと実質的に等しい大きさの駆動側のトルクまで増大させ、該第1モータの駆動側のトルクがエンジンの機械抵抗トルクと実質的に等しくなった時点、すなわちエンジンと第1モータとが抵抗となることによる減速トルクが実質的にゼロになった時点で、第1断続手段がエンジン及び第1モータと駆動輪とを切り離す。これにより、第1断続手段が締結状態から解放状態に切り換わるときの減速トルクの変化量が実質的にゼロになり、該第1断続手段の解放に伴うショックの発生が防止される。
【0019】
一方、請求項4に記載の発明によれば、減速時において、第1モータで回生している状態から第2モータで回生する状態に切り換わるときに、第1断続手段が解放される前に第2断続手段が締結され、両断続手段が締結されている状態で、第1モータによる回生量が次第に減少する一方、第2モータによる回生量が次第に増大して、回生を行うモータが第1モータから第2モータに移行される。そして、その後、第1断続手段が解放されるので、回生するモータが切り換わるにもかかわらず、回生に伴う減速トルクが急激に変化することがなくなり、該減速トルクが一時的に消滅して車両が空走状態になることや、減速トルクが急激に増加して車両にショックが発生することが抑制される。
【0020】
また、請求項5に記載の発明によれば、第2モータと第2断続手段との間にプラネタリギヤセットで構成された減速手段が設けられ、該第2断続手段がプラネタリギヤセットの所定の回転要素を固定するブレーキで構成される。これにより、簡単な構成で第2モータと駆動輪とを確実に切り離すことができる。
【0021】
具体的に言うと、第2断続手段をブレーキでなくクラッチで構成する場合、第2モータと駆動輪とを確実に切り離すために、第2断続手段は、締結油圧室内の残留作動油に遠心力が作用することにより起こる不作為の締結を防止するために遠心バランス室を設けた複雑な構成のクラッチでなければいけないが、ブレーキを用いて構成すれば、その必要がなくなり、構成が簡素化される。
【0022】
さらに、請求項6に記載の発明によれば、第1断続手段は、エンジン及び第1モータと駆動輪との間に介設された自動変速機で構成され、該自動変速機がニュートラル状態とされることにより、エンジン及び第1モータと駆動輪とが切り離される。したがって、エンジン及び第1モータと駆動輪との間に、これらを接続しまたは切り離す断続手段を設ける必要がなくなる。
【図面の簡単な説明】
【0023】
【図1】本発明の一実施形態に係るハイブリッド車両の概略的な構成図である。
【図2】減速機と第2断続手段の部分的断面図である。
【図3】制御系統を概略的に示す図である。
【図4】運転者に要求された減速度を決定するためのマップである。
【図5】要求された減速度に対するブレーキの種類を示す図である。
【図6】減速回生時における第1および第2モータのトルクを決定するためのフローを示す図である。
【図7】回生切り換えの制御のフローを示す図である。
【図8】図7に示すフローに対応するタイムチャートを示す図である。
【発明を実施するための形態】
【0024】
以下、本発明の実施の形態について説明する。
【0025】
図1は本発明の一実施形態に係る、ハイブリッド車両の構成を簡略的に示している。図中において破線は、電力の流れを示している。
【0026】
図1に示すハイブリッド車両10は、一方の駆動源であるエンジン12と、エンジン12の出力軸に連結された第1モータ14と、入力軸がエンジン12の出力軸に連結されるとともに出力軸が駆動軸16に連結され、エンジン12と駆動軸16との間を断続する第1断続手段でもある自動変速機18と、他方の駆動源である第2モータ20と、モータ20の回転を減速する減速機22と、減速機22と駆動軸16との間を断続する第2断続手段24と、車両を停止させるためのホイールブレーキ26とを有する。また、第1モータ14と第2モータ20とに電力を供給するバッテリ28を有する。
【0027】
エンジン12は、駆動源として選択されたとき(例えば、走行状態に応じて車両制御装置が選択したとき、または運転者が駆動源として選択したとき)、自動変速機18、駆動軸16、差動装置30、車軸32と順に介して駆動輪34を駆動する。
【0028】
第1モータ14は、バッテリ28から電力の供給を受けてエンジン12をクランキングするスタータとして機能する。また、減速回生時(特にエンジンブレーキが使用される時)、駆動輪34により駆動軸16などを介して駆動されて発電し、バッテリ28を充電する。
【0029】
自動変速機18は、運転者が要求する変速段に応じてエンジン12の回転を、増速して、または減速して、若しくはそのまま駆動軸16に伝達する。また、第2モータ20が駆動源として選択されているときは、ニュートラル状態になり、エンジン12と駆動軸16とを切り離す、第1断続手段として機能する。
【0030】
第2モータ20は、駆動源として選択されたとき、バッテリ28から電力の供給を受けて、減速機22、締結状態(動力伝達状態)の第2断続手段24、駆動軸16、差動装置30、車軸32と順に介して駆動輪34を駆動する。また、減速回生時、駆動輪34により駆動軸16などを介して駆動されて発電し、バッテリ28を充電する。
【0031】
また、この第2モータ20は、減速機22、第2断続手段24と一体にされて、モータユニットとして構成されている。
【0032】
図2にモータユニットの部分断面図を示す。
【0033】
このモータユニットMUにおいて、減速機22は、サンギヤ22a、ピニオン22b、キャリア22c、およびリングギヤ22dからなるプラネタリギヤセットで構成されており、そのプラネタリギヤセットのサンギヤ22aが第2モータ20の回転子20aに連結されている。また、プラネタリギヤセットのキャリア22cは、減速機22の出力軸22eに連結されている。この出力軸22eは駆動軸16に連結されている。
【0034】
また、モータユニットMUにおいて、第2断続手段24は、油圧式のブレーキで構成されており、減速機22を構成するプラネタリギヤセットのリングギヤ22dとモータユニットハウジングMUaとを断続可能に連結する。
【0035】
第2モータ20が駆動源として選択されているときは、第2断続手段24を構成する油圧式ブレーキが油圧の供給を受けてリングギヤ22dをモータユニットハウジングMUaに締結する状態になり、第2モータ20の回転子20aに連結されたサンギヤ22aの回転がピニオン22bを介して減速されてキャリア22cに伝達され、このキャリア22cと連結された減速機22の出力軸22eが回転する。そして駆動輪34に回転が伝達される。
【0036】
一方、第2モータ20が駆動源として選択されていないときは(エンジン12が駆動源として選択されているときは)、第2断続手段24を構成する油圧式ブレーキがリングギヤ22dとモータユニットハウジングMUaとを切り離した状態になり、第2モータ20の回転子20aに連結されたサンギヤ22aの回転が、キャリア22cに伝達されずピニオン22bを介してリングギヤ22dに伝達される。そしてリングギヤ22dは空回転する。
【0037】
ここからは、本発明に係る、減速制御について説明する。
【0038】
図3は、本発明に係る制御系統を概略的に示している。
【0039】
図に示すコントローラ100は、運転者が要求する減速を検出するためのアクセルペダルセンサ102およびブレーキペダルセンサ104と、ハイブリッド車両10の車速を検出する車速センサ106とからの検出信号に基づいて、減速に関連する制御を、エンジン12、第1モータ14、自動変速機18、第2モータ20、第2断続手段24、およびホイールブレーキ26に対して実行するように構成されている。
【0040】
まず、コントローラ100は、アクセルペダルの踏込量を検出するアクセルペダルセンサ102とブレーキペダルの踏込量を検出するブレーキペダルセンサ104とからの検出信号に基づいて、運転者が要求する、減速の開始やその減速度、また減速の終了を検出するように構成されている。
【0041】
具体的には、コントローラ100は、アクセルペダルセンサ102が検出したアクセルペダルの踏込量がゼロの場合に、運転者が減速の開始を要求していると判定し、その後のブレーキペダルセンサ104が検出するブレーキペダルの踏込量がゼロである場合は、運転者がエンジンブレーキによる減速を要求していると判定する。
【0042】
また、コントローラ100は、運転者が要求する減速度を、ブレーキペダルセンサ104が検出するブレーキペダルの踏込量と、車速センサ106が検出する車速と、予め作成された図4に示す減速度決定マップとに基づいて検出する。減速度は、図4に示すように、ブレーキペダルの踏込量が大きくなるほど、また、車速が高速になるほど大きくなる。
【0043】
要求された減速度で減速するために、コントローラ100が行う減速に関する制御は、減速が要求されたときの走行状態によって異なる。エンジンを駆動源として走行している場合、コントローラ100は、要求された減速度に応じて、エンジン12、第1モータ14、およびホイールブレーキ26を制御する。
【0044】
まず、図5(A)に示すように、要求された減速度がSD0より小さい場合、コントローラ100は、エンジン12を停止して(燃料の燃焼を停止して)、エンジンブレーキによる減速を実行する。なお、SD0は、図4に示すように、ブレーキペダルの踏込量がゼロのときの減速度である。
【0045】
要求減速度がSD0を超えている場合、コントローラ100は、エンジンブレーキに加え、第1モータ14を発電機として制御し、回生ブレーキによる減速を実行する。回生ブレーキ量は、第1モータ14の回生量(発電量)を変更することにより調整される。
【0046】
これより要求減速度が大きい場合、具体的に言えばエンジンブレーキと回生ブレーキとでは要求する減速度を達成できない場合、コントローラ100は、エンジンブレーキと回生ブレーキとに加え、ホイールブレーキ26を用いた減速を実行する。
【0047】
一方、第2モータ20を駆動源として走行している場合、コントローラ100は、要求された減速度に応じて、第2モータ20とホイールブレーキ26を制御する。
【0048】
図5(B)に示すように、コントローラ100は、第2モータ20を発電機として制御して回生ブレーキによる減速を実行し、この回生ブレーキのみで要求された減速度を達成できない場合は、これに加えてホイールブレーキ26を用いた減速を実行する。
【0049】
これらのことを踏まえた、第1モータ14と第2モータ20の回生量を決定するための制御の流れのフローの一例を図6に示す。このフローでは、回生量と対応する各モータのトルクを決定する。
【0050】
まず、図6に示すように、ステップS200において、コントローラ100は、アクセルペダルセンサ102からの検出信号に基づいて、アクセルペダルの踏込量がゼロか否かを判定する。アクセルペダルの踏込量がゼロであること、すなわち減速の開始が要求されたことを判定して、次のステップS210に進む。
【0051】
ステップS210において、コントローラ100は、ブレーキペダルセンサ104と車速センサ106とからの検出信号に基づいて、ブレーキペダルの踏込量と車速とを取込む。
【0052】
次に、ステップS220において、コントローラ100は、ステップ210で取込んだブレーキペダルの踏込量と車速、図4に示すマップに基づいて、運転者が要求する減速度を算出する。
【0053】
続いて、ステップS230において、コントローラ100は、ステップS220で算出した要求減速度を達成できる、駆動輪34を減速させる減速トルクTSDを算出する。
【0054】
ステップS240において、コントローラ100は、第2断続手段24が解放状態であるか否か、すなわち第2モータ20が選択されていないか否かを判定する。解放状態である場合、すなわち、第2モータ20でなくエンジン12が駆動源として選択されている場合、ステップS250に進む。そうでない場合、すなわち第2モータ20が駆動源として選択されている場合、ステップS300に進む。
【0055】
ステップS250において、コントローラ100は、エンジン12の機械抵抗トルクTERがステップS230で算出した減速トルクTSDより小さいか否かを判定する。小さい場合ステップS260に進む。そうでない場合ステップS290に進む。
【0056】
ステップS260において、コントローラ100は、第1モータ14が発生させることができる回生側(駆動輪34を減速させる側)の最大限界のトルクTm1MAXが、TSD−TERより小さいか否かを判定する。小さい場合、ステップS270に進む。そうでない場合ステップS280に進む。なお、Tm1MAXは、第1モータ14の仕様(能力)及びそのときのモータ回転速度によって決まっている。
【0057】
ステップS270において、コントローラ100は、第1モータ14に発生させるトルクTm1をTm1MAXに決定する。そして、リターンに進み、スタートに戻る。
【0058】
この場合、コントローラ100は、ステップS270を終了すると、エンジン12を停止してTERの機械抵抗トルクを発生させるとともに、Tm1MAXのトルクを発生するように第1モータ14を発電機として制御する。これに加えてホイルーブレーキ26を制御し、トータルとしてTSDの減速トルクを発生させて、すなわち要求された減速度で駆動輪32を減速する。
【0059】
一方、ステップS260でTm1MAXがTSD−TERより小さくないと判定した場合、ステップS280において、コントローラ100は、第1モータ14に発生させるトルクTm1をTSD−TERに決定する。そして、リターンに進み、スタートに戻る。
【0060】
この場合、コントローラ100は、ステップS280を終了すると、エンジン12を停止してTERの機械抵抗トルクを発生させるとともに、Tm1MAXのトルクを発生するように第1モータ14を発電機として制御する。これにより、トータルとしてTSDの減速トルクを発生させて、すなわち要求された減速度で駆動輪32を減速する。
【0061】
一方、ステップS250でTERがTSDより小さくないと判定した場合、ステップS290において、コントローラ100は、第1モータ14に発生させるトルクTm1をゼロに決定する。そして、リターンに進み、スタートに戻る。
【0062】
この場合、コントローラ100は、ステップS290を終了すると、エンジン12を停止してTERの機械抵抗トルクを発生させる。これにより、TSD(=TER)の減速トルクを発生させて、すなわち要求された減速度で駆動輪32を減速する。
【0063】
一方、ステップS240で第2断続手段24が解放状態でない、言い換えると第2モータ20が駆動源として選択されていると判定した場合、ステップS300において、コントローラ100は、第2モータ20が発生させることができる回生側(駆動輪34を減速させる側)の最大限界のトルクTm2MAXが、TSDより小さいか否かを判定する。小さい場合ステップS310に進む。そうでない場合ステップS320に進む。なお、Tm2MAXは、第2モータ20の仕様(能力)及びそのときのモータ回転速度によって決まっている。
【0064】
ステップS310において、コントローラ100は、第2モータ20に発生させるトルクTm2をTm2MAXに決定する。そして、リターンに進み、スタートに戻る。
【0065】
この場合、コントローラ100は、ステップS310を終了すると、Tm2MAXのトルクを発生するように第2モータ20を発電機として制御する。これに加えてホイルーブレーキ26を制御し、トータルとしてTSDの減速トルクを発生させて、すなわち要求された減速度で駆動輪32を減速する。
【0066】
一方、ステップS300でTm2MAXが、TSDより小さくないと判定した場合、ステップS320において、コントローラ100は、第2モータ20に発生させるトルクTm2をTSDに決定する。そして、リターンに進み、スタートに戻る。
【0067】
この場合、コントローラ100は、ステップS320を終了すると、TSDのトルクを発生するように第2モータ20を発電機として制御する。これにより、要求された減速度で駆動輪32を減速する。
【0068】
ここからは、本発明に係る、減速回生の切り換えについて説明する。
【0069】
コントローラ100は、第1モータ14の減速回生中に車速が所定車速に低下すると、減速回生のモータを第1モータ14から第2モータ20に切り換えるように構成されている。
【0070】
このことを、具体的に図7に示すフローと図8に示すタイムチャートとを用いて説明する。図7は回生切換制御の流れのフローを示し、図8は図7のフローに従うタイムチャートを示している。
【0071】
まず、コントローラ100は、第1モータ14による減速回生中に、車速センサ106が検出する車速が予め設定された所定車速VCに低下すると、回生切換制御を開始し、制御停止中の第2モータ20を駆動側で最大出力に制御する(図7のステップS400〜S420に対応。)。
【0072】
これにより、図8に示すように第2モータ20の回転数がゼロから急激に増加する。また、これに対応するように、図2に示す、減速機24を構成するプラネタリギヤセットのリングギヤ22の回転数NRが急激に減少する。
【0073】
具体的に説明すると、減速時において第2断続手段24である油圧式ブレーキが解放状態であるとき、すなわちリングギヤ22dがモータユニットハウジングMUaに締結されていないとき、該リングギヤ22dは、ピニオン22bを介して、駆動軸16に出力軸22eを介して連結されたキャリア22cにより回転されている。これに対してサンギヤ22aは回転しない。
【0074】
この状態で第2モータ20を駆動側に最大出力に制御してその回転子20aが回転し始めると、連結されているサンギヤ22aも回転し始める。そして、サンギヤ22aの回転数は急激に増加していき、これとは反対にリングギヤ22dの回転数NRは急激に減少していく。
【0075】
リングギヤ22dの回転数NRが所定回転数より小さくなると、コントローラ100は、回転同期制御を開始し、第2モータ20を駆動側で所定出力(最大出力より小さい出力)に制御する(図7のステップS430〜S440に対応。)。これにより、図8に示すように第2モータ20の回転数の増加が緩やかにされる。なお、リングギヤ22dの回転数NRは、車速センサ106が検出する車速(すなわち、キャリア22cの回転数)と、ピニオン22bとリングギヤ22dの歯数から算出することができる。
【0076】
なお、ここでいう回転同期制御は、第2モータ20の回転数を、その回転数と駆動軸16の回転数との比が減速機22の減速比になるように制御することであり、具体的には、リングギヤ22dの回転数NRがゼロになるように制御することである。
【0077】
リングギヤ22dの回転数NRが略ゼロになると(第2モータ20の回転数Nm2が対応するNm2xになると)、コントローラ100は、第2断続手段24を構成する油圧式ブレーキを締結状態に制御して、減速機24と駆動軸16とを接続する(図7のステップS450〜S460に対応。)。図2を用いて言えば、リングギヤ22d側に支持されている摩擦板24aの回転数が、モータユニットハウジングMUaに支持されている摩擦板24bの回転数と略同一のゼロになったときに、複数の摩擦板24a、24bをピストン22cにより締結方向に押圧する。
【0078】
この回転同期制御により、第2断続手段24を構成する油圧式ブレーキが締結するときのショックの発生を抑制しつつ、第2モータ20と駆動軸16とを接続することが可能になる。
【0079】
第2断続手段24を締結状態に制御すると、このとき第1断続手段18(自動変速機)も締結状態にあるので、図8に示すように、両方の断続手段が締結状態にあることになる。したがって、コントローラ100は、第2断続手段24の締結と同時に、第2モータ20をそのトルクTm2が回生側に急激に減少するように制御するのではなく(言い換えると急激に回生量を増加させるように制御するのではなく)、トルクTm2が漸減するように(回生量が漸増するように)制御する。これは、第2断続手段24の締結と同時に第2モータ20のトルクTm2を回生側に急激に減少させると(回生量を急激に増加すると)、第1断続手段18が締結状態にあってエンジン12および第1モータ14が駆動軸16に接続されている状態においては、減速トルクが急激に増加し、それによりハイブリッド車両10にショックが発生することがあるからである。
【0080】
この第2モータ20のトルクTm2を回生側に漸減させる制御と並行して、コントローラ100は、第1モータ14のトルクTm1を回生側から駆動側に漸増させる制御(回生量を漸減させる制御)も実行する(図7のステップS470。)。具体的には、トータルとしての回生量が略一定になるように制御する。それにより、回生に伴う減速トルクが急激に変化しないようにしている。
【0081】
第1モータ14のトルクTm1が駆動側に漸増して、そのトルクの大きさがエンジン12の機械抵抗トルクTERの大きさΔTEと実質的に等しくなると、コントローラ100は、第1断続手段18を解放状態に制御する、すなわち自動変速機18をニュートラル状態に制御する(図7のステップS480〜S490。)。
【0082】
すなわち、図1に示すエンジン12と駆動輪34との間の伝達トルクTAが、図8に示すように実質的にゼロになると略同時に、言い換えるとエンジン12と第1モータ14とが抵抗となることによる減速トルクが実質的にゼロになると略同時に、第1断続手段18がエンジン12および第1モータ14と駆動軸16とを切り離す。
【0083】
これにより、第1断続手段18が締結状態から解放状態に切り換わるときの減速トルクの変化量が実質的にゼロになり、該第1断続手段の18解放(自動変速機18のニュートラル状態への移行)に伴うショックの発生が防止される。
【0084】
第1断続手段18を解放状態に制御すると、コントローラ100は、第1モータ14の制御を停止する(図7のステップS500。)。これにより、回生切換制御が終了する。
【0085】
本実施形態によれば、減速時において、第1モータ14で回生している状態から第2モータ20で回生する状態に切り換わるときに、第1断続手段18が解放される前に第2断続手段24が締結され、両断続手段18、24が締結されている状態で、第1モータ14による回生量が次第に減少する一方、第2モータ20による回生量が次第に増大して、回生を行うモータが第1モータ14から第2モータ20に移行される。そして、その後、第1断続手段18が解放されるので、回生するモータが切り換わるにもかかわらず、回生に伴う減速トルクが急激に変化することがなくなり、該減速トルクが一時的に消滅して車両が空走状態になることや、減速トルクが急激に増加して車両にショックが発生することが抑制される。
【0086】
以上、上述の実施形態を挙げて本発明を説明したが、本発明はこれに限定されない。
【0087】
上述の実施形態の場合、第2断続手段24はブレーキで構成されているが、クラッチで構成してもよい。ただし、第2断続手段をブレーキでなくクラッチで構成する場合、第2モータと駆動軸とを確実に切り離すために、第2断続手段は、締結油圧室内の残留作動油に遠心力が作用することにより起こる不作為の締結を防止するために遠心バランス室を設けた複雑な構成のクラッチでなければいけない(上述の実施形態のようにブレーキを用いて第2手段を構成する方が、その構成が簡素で済む。)。
【0088】
また、上述の実施形態の場合、第1断続手段18は自動変速機で構成されているがこれに限らない。自動変速機の代わりに、エンジン及び第1モータと駆動輪との間に、これらを接続しまたは切り離す断続手段を設けてもよい。ただし、この間に自動変速機が配置されている場合は、自動変速機をニュートラル状態にして断続手段として機能させる方が、駆動系統の構成が簡素化されて好ましい。
【産業上の利用可能性】
【0089】
以上のように、本発明は、エンジンと、該エンジンに連結された第1モータと、該エンジン及び第1モータと駆動輪との間を断続する第1断続手段と、エンジンに並列に配置された第2モータと、該第2モータと駆動輪との間を断続する第2断続手段とを有するハイブリッド車両において、減速回生を第1モータから第2モータに切り換えて実行する際に起こる車両の空走状態やショックの発生を抑制することができる。したがって、モータを駆動源とする車両の分野において好適に利用される可能性がある。
【符号の説明】
【0090】
12 エンジン
14 第1モータ
18 第1断続手段(自動変速機)
20 第2モータ
24 第2断続手段(ブレーキ)
34 駆動輪
【特許請求の範囲】
【請求項1】
エンジンと、該エンジンに連結された第1モータと、該エンジン及び第1モータと駆動輪との間を断続する第1断続手段と、エンジンに並列に配置された第2モータと、該第2モータと駆動輪との間を断続する第2断続手段とを有する車両用駆動装置の制御方法であって、
減速時において、前記第1断続手段を締結し、第2断続手段を解放して、第1モータで回生を行っている状態から、第1断続手段を解放し、第2断続手段を締結して、第2モータで回生を行う状態に切り換えるときに、
前記第1断続手段を解放する前に第2断続手段を締結する第1ステップと、
前記第1ステップにより両断続手段が締結されている状態で、第1モータによる回生量を減少させつつ第2モータによる回生量を増大させる第2ステップと、
前記第2ステップにより回生を行うモータが第1モータから第2モータに移行した後、前記第1断続手段を解放する第3ステップとを実行することを特徴とする車両用駆動装置の制御方法。
【請求項2】
請求項1に記載の車両用駆動装置の制御方法において、
前記第1ステップの実行前に、第2モータを駆動して第2断続手段の第2モータ側の回転速度を断続相手側の回転速度に同期させるステップを実行し、該ステップにより前記両側の回転速度が同期した状態で前記第1ステップを実行することを特徴とする車両用駆動装置の制御方法。
【請求項3】
請求項1または2に記載の車両用駆動装置の制御方法において、
前記第2ステップで、第1モータによる回生量を減少させるときに、該第1モータのトルクを回生側のトルクからエンジンの機械抵抗トルクと実質的に等しい大きさの駆動側のトルクまで増大させ、
前記第3ステップは、第1モータの駆動側のトルクがエンジンの機械抵抗トルクと実質的に等しくなった時点で実行することを特徴とする車両用駆動装置の制御方法。
【請求項4】
エンジンと、該エンジンに連結された第1モータと、該エンジン及び第1モータと駆動輪との間を断続する第1断続手段と、エンジンに並列に配置された第2モータと、該第2モータと駆動輪との間を断続する第2断続手段とを有する車両用駆動装置の制御装置であって、
車速を検出する車速検出手段と、
車両の減速時に前記車速検出手段によって車速が所定の回生制御切換速度まで低下したことが検出されたときに、前記第1断続手段を締結状態から解放状態に切り換え、第2断続手段を解放状態から締結状態に切り換えるとともに、第1モータで回生を行っている状態から第2モータで回生を行う状態に切り換える制御手段とが備えられ、
前記制御手段は、
第1モータで回生を行っている状態から第2モータで回生を行う状態に切り換えるときに、前記第1断続手段を解放する前に第2断続手段を締結し、両断続手段が締結している状態で、第1モータによる回生量を減少させつつ第2モータによる回生量を増大させることにより、回生を行うモータを第1モータから第2モータに移行させ、その後、前記第1断続手段を解放することを特徴とする車両用駆動装置の制御装置。
【請求項5】
請求項4に記載の車両用駆動装置の制御装置において、
前記第2モータと第2断続手段との間に減速手段が配置されており、
前記第2断続手段と減速手段は、プラネタリギヤセットと、該プラネタリギヤセットの所定の回転要素を固定するブレーキとで構成され、該ブレーキが締結された状態で第2モータの回転を減速して駆動輪側に伝達し、該ブレーキが解放された状態で第2モータと駆動輪とを切り離すように構成されていることを特徴とする車両用駆動装置の制御装置。
【請求項6】
請求項4または5に記載の車両用駆動装置の制御装置において、
前記エンジン及び第1モータと駆動輪との間を断続する第1断続手段は該エンジン及び第1モータと駆動輪との間に介設された自動変速機で構成され、
前記制御手段は、前記自動変速機をニュートラル状態とすることにより、エンジン及び第1モータと駆動輪とを切り離すことを特徴とする車両用駆動装置の制御装置。
【請求項1】
エンジンと、該エンジンに連結された第1モータと、該エンジン及び第1モータと駆動輪との間を断続する第1断続手段と、エンジンに並列に配置された第2モータと、該第2モータと駆動輪との間を断続する第2断続手段とを有する車両用駆動装置の制御方法であって、
減速時において、前記第1断続手段を締結し、第2断続手段を解放して、第1モータで回生を行っている状態から、第1断続手段を解放し、第2断続手段を締結して、第2モータで回生を行う状態に切り換えるときに、
前記第1断続手段を解放する前に第2断続手段を締結する第1ステップと、
前記第1ステップにより両断続手段が締結されている状態で、第1モータによる回生量を減少させつつ第2モータによる回生量を増大させる第2ステップと、
前記第2ステップにより回生を行うモータが第1モータから第2モータに移行した後、前記第1断続手段を解放する第3ステップとを実行することを特徴とする車両用駆動装置の制御方法。
【請求項2】
請求項1に記載の車両用駆動装置の制御方法において、
前記第1ステップの実行前に、第2モータを駆動して第2断続手段の第2モータ側の回転速度を断続相手側の回転速度に同期させるステップを実行し、該ステップにより前記両側の回転速度が同期した状態で前記第1ステップを実行することを特徴とする車両用駆動装置の制御方法。
【請求項3】
請求項1または2に記載の車両用駆動装置の制御方法において、
前記第2ステップで、第1モータによる回生量を減少させるときに、該第1モータのトルクを回生側のトルクからエンジンの機械抵抗トルクと実質的に等しい大きさの駆動側のトルクまで増大させ、
前記第3ステップは、第1モータの駆動側のトルクがエンジンの機械抵抗トルクと実質的に等しくなった時点で実行することを特徴とする車両用駆動装置の制御方法。
【請求項4】
エンジンと、該エンジンに連結された第1モータと、該エンジン及び第1モータと駆動輪との間を断続する第1断続手段と、エンジンに並列に配置された第2モータと、該第2モータと駆動輪との間を断続する第2断続手段とを有する車両用駆動装置の制御装置であって、
車速を検出する車速検出手段と、
車両の減速時に前記車速検出手段によって車速が所定の回生制御切換速度まで低下したことが検出されたときに、前記第1断続手段を締結状態から解放状態に切り換え、第2断続手段を解放状態から締結状態に切り換えるとともに、第1モータで回生を行っている状態から第2モータで回生を行う状態に切り換える制御手段とが備えられ、
前記制御手段は、
第1モータで回生を行っている状態から第2モータで回生を行う状態に切り換えるときに、前記第1断続手段を解放する前に第2断続手段を締結し、両断続手段が締結している状態で、第1モータによる回生量を減少させつつ第2モータによる回生量を増大させることにより、回生を行うモータを第1モータから第2モータに移行させ、その後、前記第1断続手段を解放することを特徴とする車両用駆動装置の制御装置。
【請求項5】
請求項4に記載の車両用駆動装置の制御装置において、
前記第2モータと第2断続手段との間に減速手段が配置されており、
前記第2断続手段と減速手段は、プラネタリギヤセットと、該プラネタリギヤセットの所定の回転要素を固定するブレーキとで構成され、該ブレーキが締結された状態で第2モータの回転を減速して駆動輪側に伝達し、該ブレーキが解放された状態で第2モータと駆動輪とを切り離すように構成されていることを特徴とする車両用駆動装置の制御装置。
【請求項6】
請求項4または5に記載の車両用駆動装置の制御装置において、
前記エンジン及び第1モータと駆動輪との間を断続する第1断続手段は該エンジン及び第1モータと駆動輪との間に介設された自動変速機で構成され、
前記制御手段は、前記自動変速機をニュートラル状態とすることにより、エンジン及び第1モータと駆動輪とを切り離すことを特徴とする車両用駆動装置の制御装置。
【図1】


【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【公開番号】特開2010−158973(P2010−158973A)
【公開日】平成22年7月22日(2010.7.22)
【国際特許分類】
【出願番号】特願2009−2169(P2009−2169)
【出願日】平成21年1月8日(2009.1.8)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
【公開日】平成22年7月22日(2010.7.22)
【国際特許分類】
【出願日】平成21年1月8日(2009.1.8)
【出願人】(000003137)マツダ株式会社 (6,115)
【Fターム(参考)】
[ Back to top ]