
車両用駆動装置の制御装置

【課題】電気式差動部と無段変速部とを備えた車両用駆動装置に対し、その車両用駆動装置全体の変速比の総合的な制御を実現することにより動力伝達効率の向上を図ることが可能な車両用駆動装置の制御装置を提供する。
【解決手段】切替ブレーキB0または切替クラッチC0を係合させ、無段変速部20で総合無段変速比γTを変更する場合と、切替クラッチC0および切替ブレーキB0を共に解放させ、電気式差動部11と無段変速部20とで総合無段変速比γTを変更する場合とを比較し、燃費の良い方を選択して運転する。これにより、電気式差動部11と無段変速部20とを備えた車両において、これまでにない大幅な燃費の改善が可能となる。
【解決手段】切替ブレーキB0または切替クラッチC0を係合させ、無段変速部20で総合無段変速比γTを変更する場合と、切替クラッチC0および切替ブレーキB0を共に解放させ、電気式差動部11と無段変速部20とで総合無段変速比γTを変更する場合とを比較し、燃費の良い方を選択して運転する。これにより、電気式差動部11と無段変速部20とを備えた車両において、これまでにない大幅な燃費の改善が可能となる。
【発明の詳細な説明】
【技術分野】
【0001】
本発明は、車両用駆動装置の制御装置に係る。特に、本発明は、車両用駆動装置における動力伝達効率の向上を図るための対策に関する。
【背景技術】
【0002】
近年、環境保護等の観点から、車両に搭載されたエンジン(内燃機関)からの排気ガスの排出量低減および燃料消費率(燃費)の改善が望まれており、これらを満足する車両として、ハイブリッドシステムを搭載したハイブリッド車両が実用化されている。
【0003】
このハイブリッド車両は、ガソリンエンジンなどの駆動源と、エンジンの出力により発電またはバッテリの電力により駆動する電動機(例えばモータジェネレータまたはモータ)とを備え、エンジンおよび電動機のいずれか一方または双方を走行駆動源としている。
【0004】
この種のハイブリッド車両に搭載されたハイブリッドシステムの駆動装置として、例えば下記の特許文献1〜3に開示されているものが知られている。これら特許文献に開示されている駆動装置は、差動部の回転要素に連結された第1電動機、差動部の入力軸に入力されたエンジンの出力を上記第1電動機および出力軸(伝達軸)に分配する動力分配機構、および、上記出力軸に連結された第2電動機などによって構成される電気式差動部と、この電気式差動部から駆動装置の出力軸との間における動力伝達経路の一部を構成する変速部(例えば有段式の変速機)とを備えた構成となっている。このような車両用駆動装置では、第1電動機および第2電動機の運転状態を制御することにより、電気式差動部が無段変速機構(電気式無段変速部)として作動する。また、上記動力分配機構は、その差動により、エンジンからの動力の主部を駆動輪に向けて機械的に伝達し、そのエンジンからの動力の一部を第1電動機から第2電動機への電気パスを用いて電気的に伝達するようになっている。
【0005】
また、特許文献3には、上記電気式差動部をロックする(非差動とする)ことによる電気パスの低減とエンジン動作点の変更による燃費の損得とを比較し、燃費の良い方で車両用駆動装置を運転させることが開示されている。
【特許文献1】特開2006−273305号公報
【特許文献2】特開2005−264762号公報
【特許文献3】特開2005−240917号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
上述したように前段側に電気式差動部が備えられ、後段側に変速部が備えられた車両用駆動装置の実用性を高めることに鑑み、本発明の発明者らは、電気式差動部の差動および変速部の変速を制御する手法について考察を行った。
【0007】
そして、上記特許文献1〜3に開示されているように後段側の変速部として有段変速機が適用されているものでは、この後段側の変速機の変速比が段階的にしか変化できないため、如何なる車速においても最適な燃費を得るといった制御の実現は不可能であることを見出した。このような事項は未公知のものである。
【0008】
そこで、本発明の発明者らは、上記変速部として、ベルト式やトロイダル式等の無段変速機を適用することに着目した(トロイダル式無段変速機を適用することについては未公開)。
【0009】
このように上記変速部として無段変速機を適用する場合、変速比の調整が可能な範囲ではエンジンを燃費最適動作点で駆動できるため、上述した特許文献3に係る燃費改善のための技術的思想は適用できず、燃費の良い車両用駆動装置の運転状態を選択するための新たな技術的思想を提案する必要がある。
【0010】
以上のような課題は、未公知の事項であって、本発明の発明者らが新たに見出したものである。
【0011】
本発明は、かかる点に鑑みてなされたものであり、その目的とするところは、電気式差動部と無段変速部とを備えた車両用駆動装置に対し、その車両用駆動装置全体の変速比の総合的な制御を実現することにより動力伝達効率の向上を図ることが可能な車両用駆動装置の制御装置を提供することにある。
【課題を解決するための手段】
【0012】
上記の目的を達成するために講じられた本発明の解決手段は、電気式差動部と無段変速部とを備えた車両用駆動装置の制御装置であって、上記電気式差動部の差動を制限して上記無段変速部で総合無段変速比を変更する場合と、上記電気式差動部を差動させ、この電気式差動部と上記無段変速部とで総合無段変速比を変更する場合とのそれぞれの燃費を車両の走行条件に応じて比較し、燃費の良い方を使用するようにしている。
【0013】
また好適には、上記電気式差動部の差動を制限した電気パス量の変化と、上記無段変速部の変速比が変化することによるその伝達効率の変化とを比較対象とする。
【0014】
また好適には、上記電気式差動部の入力側にはエンジンが配設されており、このエンジンの動作点が相違する場合、その変化を考慮して、上記電気式差動部の差動を制限して上記無段変速部で総合無段変速比を変更する場合と、上記電気式差動部を差動させ、この電気式差動部と上記無段変速部とで総合無段変速比を変更する場合とのうちの燃費の良い方を使用する。
【0015】
また好適には、上記車両の走行条件を車速とする。
【0016】
また好適には、電気式差動部の差動を制限した状態は、ローおよびハイの2つの状態を有する。
【0017】
また好適には、上記電気式差動部の差動の強制領域ではない場合に、上記電気式差動部の差動を制限して上記無段変速部で総合無段変速比を変更する場合と、上記電気式差動部を差動させ、この電気式差動部と上記無段変速部とで総合無段変速比を変更する場合とのうちの燃費の良い方を使用する。
【0018】
また好適には、上記電気式差動部は、差動ギヤと2つの電動機とを備えて構成されている。
【0019】
本発明では、上記電気式差動部の差動を制限して上記無段変速部で総合無段変速比を変更する場合と、上記電気式差動部を差動させ、この電気式差動部と上記無段変速部とで総合無段変速比を変更する場合とのうち燃費の良い方を使用した運転を実現できる。このため、これまでにない大幅な燃費の改善が可能な車両用駆動装置の制御を実現できる。
【0020】
また、上記車両の走行条件を車速とした場合には、電気パスを低減することによる伝達効率の向上が図れる。
【0021】
また、電気式差動部の差動を制限した状態としてローおよびハイの2つの状態を備えさせた場合には、動力性能と燃費性能との両立が可能となり、また、駆動装置の総合変速比の幅を大きく確保することができる。逆に言えば、無段変速部の変速比幅を比較的小さく設定することが可能になる。
【0022】
また、電気式差動部の差動の強制領域ではない場合に、上述した燃費の良い方を使用する制御を行うものでは、上記強制領域である場合には、その強制された状態(強制差動状態または強制非差動状態)を優先する。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施の形態を図面に基づいて説明する。
【0024】
(第1実施形態)
本実施形態は、2つのモータ・ジェネレータを備え、且つFR(フロントエンジン・リヤドライブ)型車両として構成されたハイブリッド車両に搭載される車両駆動装置に本発明を適用した場合について説明する。
【0025】
<ハイブリッドシステムの全体構成>
図1は、本実施形態に係るハイブリッド車両に搭載されたハイブリッドシステムを構成する車両用駆動装置10(以下、「駆動装置10」という)を示すスケルトン図である。
【0026】
図1において、駆動装置10は、トランスミッションケース12(以下、「ケース12」という)内において共通の軸心上に配設された入力回転部材としての入力軸14と、この入力軸14に、直接または図示しない脈動吸収ダンパ(振動減衰装置)を介して連結された電気式差動部11と、この電気式差動部11の出力回転部材である伝達部材18とを備えている。また、この駆動装置10は、上記伝達部材18に連結されて、上記電気式差動部11と駆動輪3(図8参照)との間の動力伝達経路の一部を構成する機械式無段変速部20(以下、「無段変速部20」という)と、この無段変速部20の出力側に連結された出力軸22とを備えている。更に、この駆動装置10は、上記入力軸14に直接または図示しない脈動吸収ダンパを介して連結された走行用の駆動力源(動力源)としてのエンジン8を備えている。このエンジン8は、例えばガソリンエンジンやディーゼルエンジン等の内燃機関により構成されている。これにより、車両用駆動装置10は、エンジン8からの動力を、上記電気式差動部11、無段変速部20およびディファレンシャル装置2(終減速機:図8参照)を経て駆動輪3へ伝達するようになっている。
【0027】
−電気式差動部11−
上記電気式差動部11は、第1電動機MG1と、上記入力軸14に入力されたエンジン8の出力を機械的に分配する機械的機構であってエンジン8の出力を第1電動機MG1および伝達部材18に分配する動力分配機構(差動機構)16と、伝達部材18と一体的に回転するように設けられた第2電動機MG2とを備えている。なお、本実施形態における第1電動機MG1および第2電動機MG2は、モータ(電動機)機能のみならず発電機能をも有する所謂モータジェネレータであるが、差動用電動機である第1電動機MG1は反力を発生させるためのジェネレータ(発電)機能を少なくとも備え、走行用電動機である第2電動機MG2は走行用の駆動力源として駆動力を出力するためのモータ(電動機)機能を少なくとも備えている。
【0028】
上記動力分配機構16は、例えば「0.436」程度の所定のギヤ比ρ0を有するシングルピニオン型の差動部遊星歯車装置17と、切替クラッチC0と、切替ブレーキB0とを備えている。上記差動部遊星歯車装置17は、差動部サンギヤS0、差動部遊星歯車P0、その差動部遊星歯車P0を自転および公転可能に支持する差動部キャリヤCA0、差動部遊星歯車P0を介して差動部サンギヤS0と噛み合う差動部リングギヤR0を回転要素(要素)として備えている。差動部サンギヤS0の歯数をZS0、差動部リングギヤR0の歯数をZR0とした場合、上記ギヤ比ρ0はZS0/ZR0である。
【0029】
この動力分配機構16においては、差動部キャリヤCA0が入力軸14すなわちエンジン8に連結され、差動部サンギヤS0が第1電動機MG1に連結され、差動部リングギヤR0が伝達部材18に連結されている。
【0030】
また、切替ブレーキB0は差動部サンギヤS0とケース12との間に設けられ、切替クラッチC0は差動部サンギヤS0と差動部キャリヤCA0との間に設けられている。これら切替クラッチC0および切替ブレーキB0が共に解放されると、動力分配機構16は差動部遊星歯車装置17の3要素である差動部サンギヤS0、差動部キャリヤCA0、差動部リングギヤR0がそれぞれ相互に相対回転可能となり、差動作用が可能な、すなわち差動作用が働く差動状態となる。これにより、エンジン8の出力が第1電動機MG1と伝達部材18とに分配されるとともに、分配されたエンジン8の出力の一部で第1電動機MG1から発生させられた電気エネルギが蓄電されたり、この電気エネルギにより第2電動機MG2が回転駆動される。このため、電気式差動部11(動力分配機構16)は、電気的な差動装置として機能し、所謂無段変速状態(電気的CVT状態)となり、エンジン8の回転数に関わらず伝達部材18の回転を連続的に(無段階に)変化させることができる。すなわち、動力分配機構16が差動状態になると、電気式差動部11も差動状態となり、この電気式差動部11は、その変速比γ0(入力軸14の回転数NlN/伝達部材18の回転数N18)が最小値γ0minから最大値γ0maxまで連続的に変化可能となる電気的な無段変速機として機能する無段変速状態となる。このように動力分配機構16が差動状態になると、動力分配機構16(電気式差動部11)に動力伝達可能に連結された第1電動機MG1、第2電動機MG2、およびエンジン8の各運転状態が制御されることにより、動力分配機構16の差動状態、すなわち入力軸14の回転数と伝達部材18の回転数との差動状態が制御される。
【0031】
この状態で、上記切替クラッチC0または切替ブレーキB0を係合させると、動力分配機構16は上記差動作用をしない、すなわち差動作用が不能な非差動状態となる。具体的には、上記切替クラッチC0を係合させて差動部サンギヤS0と差動部キャリヤCA0とが一体的に係合すると、動力分配機構16は、差動部遊星歯車装置17の3要素である差動部サンギヤS0、差動部キャリヤCA0、差動部リングギヤR0が共に回転、すなわち一体回転するロック状態となって上記差動作用が不能な非差動状態となる。これにより、電気式差動部11も非差動状態となる。また、エンジン8の回転数と伝達部材18の回転数とが一致する状態となるので、電気式差動部11(動力分配機構16)は変速比γ0が「1」に固定された変速機として機能する定変速状態すなわち有段変速状態となる。
【0032】
一方、上記切替クラッチC0に代えて切替ブレーキB0を係合させて差動部サンギヤS0がケース12に連結すると、動力分配機構16は、差動部サンギヤS0が非回転状態となるロック状態となって上記差動作用が不能な非差動状態となることから、電気式差動部11も非差動状態となる。また、差動部リングギヤR0は差動部キャリヤCA0よりも増速回転するので、動力分配機構16は増速機構として機能し、電気式差動部11(動力分配機構16)は変速比γ0が「1」より小さい値、例えば「0.696」に固定された増速変速機として機能する定変速状態すなわち有段変速状態となる。
【0033】
このように、本実施形態では、上記切替クラッチC0および切替ブレーキB0が、電気式差動部11(動力分配機構16)の変速状態を差動状態すなわち非ロック状態と、非差動状態すなわちロック状態とに選択的に切替える。つまり、電気式差動部11(動力分配機構16)を電気的な差動装置として作動可能な差動状態(例えば変速比が連続的に変化可能な無段変速機として作動する電気的な無段変速作動が可能な無段変速状態)と、電気的な無段変速作動を行わない変速状態(例えば無段変速機として作動せず無段変速作動を非作動として変速比を一定にロックするロック状態すなわち1または2種類以上の変速比の単段または複数段の変速機として作動する定変速状態(非差動状態))とに選択的に切替える差動状態切替装置として機能している。
【0034】
電気式差動部11は、切替クラッチC0および切替ブレーキB0が解放され且つ第1電動機MG1が反力を発生しない自由回転状態にされた場合には、電気式差動部11内の動力伝達経路における動力伝達を遮断する動力伝達遮断状態となる。一方、第1電動機MG1が反力を発生し、または、切替クラッチC0もしくは切替ブレーキB0の一方が係合された場合には、電気式差動部11内の動力伝達経路における動力伝達を可能とする動力伝達可能状態となる。そして、電気式差動部11が動力伝達遮断状態または動力伝達可能状態とされることにより、駆動装置10全体が動力伝達遮断状態または動力伝達可能状態となる。但し、本実施形態では第2電動機MG2と駆動輪3との間の動力伝達経路は遮断されることがないので、駆動装置10全体が動力伝達遮断状態とされるためには第2電動機MG2は自由回転状態にされる。
【0035】
上記切替クラッチC0および切替ブレーキB0は、従来の車両用有段式自動変速機においてよく用いられている油圧式摩擦係合装置であって、互いに重ねられた複数枚の摩擦板が油圧アクチュエータにより押圧される湿式多板型や、回転するドラムの外周面に巻き付けられた1本または2本のバンドの一端が油圧アクチュエータによって引き締められるバンドブレーキなどにより構成され、それが介装されている両側の部材を選択的に連結するようになっている。
【0036】
−無段変速部20−
無段変速部20は、その変速比γCVT(=伝達部材18の回転数N18/出力軸22の回転数NOUT)を機械的作用により連続的に変化させることができる無段の自動変速機として機能する所謂トロイダル式CVT変速装置(以下、「トロイダル式無段変速部20」と呼ぶ場合もある)により構成されている。本実施形態ではダブルキャビティ式のハーフトロイダル型の無段変速部20を適用した場合について説明するが、フルトロイダル型の無段変速部を適用することも可能である。
【0037】
上記伝達部材18の後段側に連結されている上記トロイダル式無段変速部20は、伝達部材18の回転軸上で相対向する2つの入力ディスク23a,23b(以下、特に区別しない場合には「入力ディスク23」という)と、これら2つ入力ディスク23a,23bの間において入力ディスク23a,23bのそれぞれに相対向して同軸上に設けられ且つ出力ギヤ27およびカウンタシャフト25を介して出力軸22に連結された2つの出力ディスク24a,24b(以下、特に区別しない場合には「出力ディスク24」という)とを備えている。また、この無段変速部20は、相対向するそれぞれの入力ディスク23a,23bと出力ディスク24a,24bとの間に、その回転軸を対称軸として2つずつ合計4つのパワーローラ26a,26b,26c,26d(以下、特に区別しない場合には「パワーローラ26」という)を備えている。
【0038】
そして、相対向する入力ディスク23と出力ディスク24とは互いが近付く方向に押圧され、それらの対向面はその間に設けられた2つのパワーローラ26の外周面と摩擦力を発生して接触し、その接触を維持しつつパワーローラ26の回転軸が揺動可能となるように、入力ディスク23および出力ディスク24の相対向するパワーローラ26との接触面は略円弧状断面を有している。
【0039】
このように構成されたトロイダル式無段変速部20では、第1の動力伝達経路をなす一組の入力ディスク23a、パワーローラ26a,26b、出力ディスク24aと、第2の動力伝達経路をなす一組の入力ディスク23b、パワーローラ26c,26d、出力ディスク24bとが、機械的配置としては伝達部材18の回転軸上で直列に設けられ、動力伝達経路としては並列に設けられている。そして、伝達部材18から入力された駆動トルクは、トロイダル式無段変速部20内の並列な2つの動力伝達経路でそれぞれ入力ディスク23、パワーローラ26、出力ディスク24の順に伝達され、この出力ディスク24に上記カウンタシャフト25を介して連結された出力軸22を経て駆動輪3へ伝達されるようになっている。
【0040】
このトロイダル式無段変速部20では、入力ディスク23と出力ディスク24とのそれぞれに対して外周面で摩擦接触する4つのパワーローラ26a〜26dの回転(傾転)角度を同時に変化させることによって、入力ディスク23におけるパワーローラ26との接触点の半径(有効径)と出力ディスク24におけるパワーローラ26との接触点の半径(有効径)との比が変化し、トロイダル式無段変速部20の変速比γCVTが連続的に変化する。以下、この変速比γCVTを変更するための機構について具体的に説明する。
【0041】
図2および図3は、トロイダル式無段変速部20を模式的に示す図である。上述したように、トロイダル式無段変速部20は、トロイダル面を対向させた上記入力ディスク23と出力ディスク24とが、二対、同一軸線上に配置され、出力ディスク24a,24bの間に出力ギヤ27が配置されている。この出力ギヤ27は上記カウンタシャフト25に動力を伝達するものである。
【0042】
各ディスク23,24および出力ギヤ27の中心部を上記伝達部材18が貫通しており、各入力ディスク23a,23bは、この伝達部材18に一体となって回転し、且つ軸線方向に移動できるように取り付けられている。これに対し、出力ディスク24a,24bおよび出力ギヤ27は、伝達部材18に対して相対回転自在に嵌合されており、且つ各出力ディスク24a,24bと出力ギヤ27とは一体となって回転するように連結されている。
【0043】
伝達部材18の一方の端部(図2の左側の端部)には、入力ディスク23aを抜け止めするためのロック部材としてのロックナット40が取り付けられている。これとは反対側の端部(図2での右側の端部)には、油圧シリンダ41が取り付けられている。この油圧シリンダ41は、各対の入力ディスク23と出力ディスク24とを互いに接近させる方向に押圧する挟圧力を生じさせるための挟圧力発生機構であって、シリンダ42が伝達部材18に固定されているとともに、そのシリンダ42の内部に軸線方向に移動可能に収容したピストン43が、入力ディスク23bの背面に当接している。したがって、これらシリンダ42とピストン43との間に油圧を供給することにより、ピストン43が一方の入力ディスク23bをこれとは反対側に配置されている入力ディスク23a側に向けて押圧するように構成されている。なお、この挟圧力発生機構は、油圧シリンダ41に代えて、トルクを軸線方向の推力に変化させるカム機構やネジ機構などの他の機構によって構成してもよい。
【0044】
各対の入力ディスク23と出力ディスク24との間にそれぞれ挟み込まれているパワーローラ26は、入力ディスク23と出力ディスク24との間でのトルクの伝達を媒介するいわゆる伝動部材であって、ほぼ円盤状をなし、入力ディスク23と出力ディスク24との間に、各ディスク23,24の円周方向に等間隔に配置されている。各パワーローラ26は、各ディスク23,24の回転に伴って自転し、また各ディスク23,24の間で傾く(傾転する)ように、それぞれトラニオン45によって保持されている。
【0045】
各トラニオン45は、パワーローラ26を自転かつ傾転自在に保持するためのものであって、中心側を向く面を平坦面とした保持部46の上下両側にトラニオン軸47,47が延びて形成されている。図3における上側のトラニオン軸47が軸受を介してアッパヨーク48に嵌合させられ、また、図3における下側のトラニオン軸47が軸受を介してロアヨーク49に嵌合させられている。したがって各トラニオン45は、それぞれトラニオン軸47,47を中心にして回転できるように各ヨーク48,49によって互いに連結されている。したがってトラニオン軸47の中心軸線が傾転軸となっている。
【0046】
各パワーローラ26は各トラニオン45における上記保持部46に取り付けたピボットシャフト50によって回転自在に保持され、また各パワーローラ26とそれぞれのトラニオン45との間にはスラスト軸受51が介装されている。
【0047】
各トラニオン45における図3での下側のトラニオン軸47は、直線的な前後動作を行うアクチュエータに連結されている。そのアクチュエータは、流体圧シリンダや、トルクを推力に変化させて出力する電動シリンダなどによって構成されており、本実施形態では油圧シリンダ52が採用されている。具体的には、上記トラニオン軸47は、各パワーローラ26に対応して設けた油圧シリンダ52のピストン52aに連結されている。これらの油圧シリンダ52は、一方のパワーローラ26を図3において上側に移動させると同時に他方のパワーローラ26を図3において下側に移動させるように構成されている。例えば、図3において左側の油圧シリンダ52におけるピストン52aより、上側の油圧室が変速比の小さい高速側に変速させるためのハイ油室52Hであり、これとは反対の下側の油圧室が変速比の大きい低速側に変速させるためのロー油室52Lとなっている。また、図3における右側の油圧シリンダ52におけるピストン52aより、上側の油圧室が変速比の大きい低速側に変速させるためのロー油室52Lであり、これとは反対の下側の油圧室が変速比の小さい高速側に変速させるためのハイ油室52Hとなっている。そして、ハイ油室52H,52H同士、およびロー油室52L,52L同士が互いに連通されている。
【0048】
上記のパワーローラ26を中立位置からアップシフト側あるいはダウンシフト側に変位(オフセット)させて変速を実行するための機構について説明すると、その機構は上記油圧シリンダ52などのアクチュエータを動作させるように構成された機構であり、図に示すものでは、デューティ制御される電磁弁53によって構成されている。なお、この種の制御弁としては、上述したハイ油室52H,52Hに対する油圧の給排を制御する弁とロー油室52L,52Lに対する油圧の給排を制御する弁との二本を設けてもよく、あるいは一本の制御弁で各油室52H,52H,52L,52Lに対する油圧の給排を同時に制御するように構成してもよい。
【0049】
図に示す電磁弁53は、上記ハイ油室52H,52Hに連通するハイ側ポート53aと、上記ロー油室52L,52Lに連通するロー側ポート53bと、ライン圧が入力される入力ポート53cと、二つのドレーンポート53d,53eと、ソレノイド54およびその反対側に配置されたスプリング55によって軸線方向に移動させられて各ポートの連通状態を切り替えるスプール56とを有している。そして、そのスプール56は、入力ポート53cおよび各ドレーンポート53d,53eをハイ側ポート53aおよびロー側ポート53bのいずれに対しても閉じた状態、入力ポート53cをハイ側ポート53aに連通させると同時にロー側ポート53bをドレーンポート53eに連通させたアップシフト状態、これとは反対に、入力ポート53cをロー側ポート53bに連通させると同時にハイ側ポート53aをドレーンポート53dに連通させたダウンシフト状態とに切り替えるように構成されている。
【0050】
上記電磁弁53を使用した変速制御は電気的に実行されるよう構成されている。すなわち、各パワーローラ26の位置をトラニオン45の位置もしくは変位量として検出するためにストロークセンサ61が設けられている。このストロークセンサ61は一例として、一方のトラニオン45のトラニオン軸47に取り付けられており、その軸線方向の変位量を電気的に検出し、検出信号として出力するように構成されている。ここで変位量とは、パワーローラ26に対してサイドスリップ力もしくは傾転力が作用しない中立位置からの上記傾転軸方向の移動量である。
【0051】
また、いずれかのトラニオン軸47に傾転角センサ62が設けられている。図に示すものでは、上記ストロークセンサ61が取り付けられているトラニオン軸47と同一軸線上にある他のトラニオン軸47に傾転角センサ62が取り付けられている。この傾転角センサ62は、トラニオン軸47の回転角度を電気的に検出して信号を出力するものであって、例えば入力ディスク23と出力ディスク24との回転数が等しい状態すなわち変速比が「1」の状態におけるトラニオン軸47の角度を「0」とし、この状態からのトラニオン軸47の回転角度を傾転角として検出し、その傾転角に応じた電気的な信号を出力するようになっている。
【0052】
さらに、いずれかの入力ディスク23の回転数を検出して電気的な信号を出力する入力回転数センサ63と、いずれかの出力ディスク24の回転数を検出して電気的な信号を出力する出力回転数センサ64とが設けられている。したがって、これらの回転数センサ63,64で検出された各回転数に基づいて、実際の変速比γCVTを求めることができる。
【0053】
これら各センサ61,62,63,64は、変速比や上述した挟圧力を制御するための電子制御装置(ECU)60(図6参照)に電気的に接続されている。この電子制御装置60は、マイクロコンピュータを主体として構成されたものであって、入力された信号および予め記憶しているデータならびにプログラムに従って各種の演算を行い、その演算結果に基づいて制御指令信号を出力するように構成されている。
【0054】
上記のトロイダル式無段変速部20によるトルクの伝達および変速について説明すると、伝達部材18から入力ディスク23a,23bにトルクが入力されると、その入力ディスク23a,23bにトラクションオイルを介して接触しているパワーローラ26a〜26dにトルクが伝達され、さらにそのパワーローラ26a〜26dから出力ディスク24a,24bにトラクションオイルを介してトルクが伝達される。その場合、トラクションオイルは加圧されることによりガラス転移し、それに伴う大きい剪断力によってトルクを伝達するので、各ディスク23,24は入力トルクに応じた圧力がパワーローラ26との間に生じるように押圧される。
【0055】
また、パワーローラ26の周速と各ディスク23,24のトルク伝達点(パワーローラ26がトラクションオイルを介して接触している点)の周速とは実質的に同じであるから、パワーローラ26が傾転して入力ディスク23との間のトルク伝達点の回転中心軸線からの半径と、出力ディスク24との間のトルク伝達点の回転中心からの半径とに応じて各ディスク23,24の回転数(回転速度)が異なり、その回転数の比率が変速比となる。
【0056】
このようにして変速比を設定するパワーローラ26の傾転は、パワーローラ26を図3の上下方向に移動させることにより生じる。例えば、上記電磁弁53を制御して油圧シリンダ52,52のハイ油室52H,52Hにライン圧を供給すると、図3の左側のパワーローラ26aが下側に移動し、且つ図3の右側のパワーローラ26bが上側に移動する。その結果、各パワーローラ26a,26bにはこれを傾転させる力(サイドスリップ力)がディスク23a,24aとの間に生じ、各パワーローラ26a,26bが傾転する。パワーローラ26a,26bの変位量は、実際の傾転角と目標とする傾転角との偏差に基づいて制御され、したがってパワーローラ26a,26bが次第に傾転して目標傾転角に一致すると、パワーローラ26a,26bは中立位置に復帰させられ、その傾転が止まる。その結果、目標とする変速比が設定される。
【0057】
上記の電子制御装置(ECU)60は、スロットル開度などで代表される要求駆動量や車速などに基づいて目標とする変速比に対応する傾転角度を求め、その傾転角度を達成するように電磁弁53に指令信号を出力する。その目標傾転角度は、パワーローラ26をトラニオン45と共にストロークさせることにより達成できるので、パワーローラ26のストローク量を上記ストロークセンサ61によって検出し、その検出したストローク量とストローク指令量との偏差を制御偏差として電磁弁53に対する指令信号(例えばデューティ比)がフィードバック制御される。
【0058】
上記の基本的な変速制御を図4にブロック図によって概念的に示してある。図4において、先ず、目標変速比に相当する目標傾転角度φoと実際の傾転角度φとの偏差が求められる。その目標変速比およびこれに対応する傾転角度の算出は、従来、トロイダル型無段変速機での変速制御で実行されているものと同様にして行うことができる。例えば、アクセル開度などで表される要求駆動量と車速とに基づいて要求駆動力が算出され、その要求駆動力と車速とから目標出力が求められ、その目標出力を最小の燃費で達成するエンジン8の回転数が求められ、その回転数でエンジン8が駆動するように目標変速比および目標傾転角度φ0が求められる。
【0059】
上記偏差に所定のゲインK1による処理を施してパワーローラ26のストローク量(一例として中立点からのストローク量)X0が求められる。そのストローク量X0と実際のストローク量Xとの偏差に所定のゲインK2による処理が施されて、上記電磁弁53について指令信号(例えばデューティ比)が求められ、その電磁弁53の出力する油圧によってパワーローラ26が変位し、かつそれに伴ってパワーローラ26が傾転することにより、無段変速部20が変速する。
【0060】
−変速−
以上のように構成された駆動装置10では、上述した如く動力分配機構16に切替クラッチC0および切替ブレーキB0が備えられており、切替クラッチC0および切替ブレーキB0の何れかが係合作動させられることによって、電気式差動部11は上述した無段変速機として作動する無段変速状態に加え、変速比γ0が一定の変速機として作動する定変速状態を構成することが可能とされている。したがって、駆動装置10では、切替クラッチC0および切替ブレーキB0の何れかを係合作動させることで定変速状態とされた電気式差動部11と無段変速部20とで機械的な無段変速機として作動する無段変速状態が構成され、切替クラッチC0および切替ブレーキB0の何れも係合作動させないことで無段変速状態とされた電気式差動部11と無段変速部20とで電気的かつ機械的な無段変速機として作動する無段変速状態が構成される。なお、駆動装置10内の動力伝達経路が遮断されたニュートラル「N」状態とする場合には、例えば切替クラッチC0および切替ブレーキB0が解放され第1電動機MG1および第2電動機MG2が共に自由回転状態とされる。
【0061】
駆動装置10において切替クラッチC0および切替ブレーキB0が共に解放された場合には、それにより電気式差動部11が電気的な無段変速機として機能し、それに直列の無段変速部20が機械的な無段変速機として機能して、電気式差動部11の変速比γ0と無段変速部20の変速比γCVTとの積である駆動装置10全体としてのトータル変速比(総合変速比)γT(=入力軸14の回転数NIN/出力軸22の回転数NOUT)が無段階に得られる。
【0062】
図5は、第1変速部として機能する電気式差動部11と第2変速部(無段変速部)として機能する無段変速部20とから構成される駆動装置10において、電気式差動部11の各回転要素の回転数(回転速度)の相対関係を直線上で表すことができる共線図(ある特定の動力伝達状態における共線図)を示している。この図5の共線図は、各回転要素を示す横軸と相対的回転数(回転速度)を示す縦軸とから成る二次元座標であり、2本の横線のうちの下側の横線X1が回転数零を示し、上側の横線X2が回転数「1.0」すなわち入力軸14に連結されたエンジン8の回転数NEを示している。
【0063】
また、電気式差動部11の各回転要素に対応する3本の縦線Y1,Y2,Y3は、左側から順に第2回転要素(第2要素)RE2に対応する差動部サンギヤS0、第1回転要素(第1要素)RE1に対応する差動部キャリヤCA0、第3回転要素(第3要素)RE3に対応する差動部リングギヤR0をそれぞれ表している。共線図の縦軸間の関係において遊星歯車装置17では差動部サンギヤS0と差動部キャリヤCA0との間が「1」に対応する間隔とされると、差動部キャリヤCA0と差動部リングギヤR0との間が遊星歯車装置17のギヤ比ρに対応する間隔とされる。すなわち、電気式差動部11では縦線Y1とY2との縦線間が「1」に対応する間隔に設定され、縦線Y2とY3との間隔は上記ギヤ比ρ0に対応する間隔に設定される。
【0064】
上記図5の共線図を用いて表現すれば、本実施形態の駆動装置10は、動力分配機構16(電気式差動部11)において、差動部遊星歯車装置17の第1回転要素RE1(差動部キャリヤCA0)が入力軸14すなわちエンジン8に連結されるとともに切替クラッチC0を介して第2回転要素(差動部サンギヤS0)RE2と選択的に連結され、この第2回転要素RE2が第1電動機MG1に連結されるとともに切替ブレーキB0を介してケース12に選択的に連結され、第3回転要素(差動部リングギヤR0)RE3が伝達部材18および第2電動機MG2に連結されて、入力軸14の回転を、伝達部材18を介して無段変速部20へ伝達する(入力させる)ように構成されている。このとき、Y2とX2の交点を通る直線L0により差動部サンギヤS0の回転数と差動部リングギヤR0の回転数との関係が示される。
【0065】
例えば、上記切替クラッチC0および切替ブレーキB0の解放により電気式差動部11が無段変速状態(差動状態)に切替えられたときは、第1電動機MG1の回転数を制御することによって直線L0と縦線Y1との交点で示される差動部サンギヤS0の回転が上昇または下降させられ、差動部リングギヤR0の回転数が略一定である場合には、直線L0と縦線Y2との交点で示される差動部キャリヤCA0の回転数が上昇または下降させられる。また、切替クラッチC0の係合により差動部サンギヤS0と差動部キャリヤCA0とが連結されると、動力分配機構16は差動部サンギヤS0と差動部キャリヤCA0と差動部リングギヤR0とが一体回転する非差動状態とされるので、直線L0は横線X2と一致し、エンジン回転数NEと同じ回転で伝達部材18が回転する。或いは、切替ブレーキB0の係合によって差動部サンギヤS0の回転が停止させられると、動力分配機構16は増速機構として機能する非差動状態とされるので、直線L0は図5に示す状態となり、その直線L0と縦線Y3との交点で示される差動部リングギヤR0すなわち伝達部材18の回転数は、エンジン回転数NEよりも増速された回転で無段変速部20へ入力される。
【0066】
また、無段変速部20においては、その変速比γCVTが連続的に変化し、出力軸22に向けて動力が伝達される。
【0067】
−電子制御装置60−
図6は、駆動装置10を制御するための制御装置である電子制御装置60に入力される信号及びその電子制御装置60から出力される信号を示している。この電子制御装置60は、CPU、ROM、RAM、および入出力インターフェースなどから成る所謂マイクロコンピュータを含んで構成されており、RAMの一時記憶機能を利用しつつROMに予め記憶されたプログラムに従って信号処埋を行うことによりエンジン8、第1電動機MG1、第2電動機MG2に関するハイブリッド駆動制御、無段変速部20の変速制御等の駆動制御を実行するものである。
【0068】
電子制御装置60には、上述したストロークセンサ、傾転角センサ、入力回転数センサ、出力回転数センサからの信号の他、エンジン水温TEMPWを示す信号、シフトポジションPSHを表す信号、第1電動機MG1の回転数NMG1(以下、「第1電動機回転数NMG1」という)を表す信号、第2電動機MG2の回転数NMG2(以下、「第2電動機回転数NMG2」という)を表す信号、エンジン8の回転数であるエンジン回転数NEを表す信号、変速比設定値を示す信号、Mモード(手動変速走行モード)を指令する信号、エアコンの作動を示すエアコン信号、出力軸22の回転数NOUT(以下、「出力軸回転数NOUT」という)に対応する車速Vを表す信号、CVT油温センサにより検出される無段変速部20の作動油温TEMPCVTを示す油温信号、サイドブレーキ操作を示す信号、フットブレーキ操作を示す信号、触媒温度を示す触媒温度信号、運転者の出力要求量に対応するアクセル開度Acc(アクセルペダルの操作量Acc)を示すアクセル開度信号、カム角信号、スノーモード設定を示すスノーモード設定信号、車両の前後加速度を示す加速度信号、オートクルーズ走行を示すオートクルーズ信号、車両の重量を示す車重信号、各車輪の車輪速を示す車輪速信号、エンジン8の空燃比A/Fを示す信号、スロットルバルブの開度を示す信号などが、それぞれ供給される。
【0069】
また、上記電子制御装置60からは、エンジン出力を制御するエンジン出力制御装置71(図8参照)への制御信号、例えばエンジン8の吸気管95に備えられた電子スロットル弁96の開度θTHを操作するスロットルアクチュエータ97への駆動信号や燃料噴射装置98によるエンジン8の各気筒内への燃料供給量を制御する燃料供給量信号や点火装置99によるエンジン8の点火時期を指令する点火信号、過給圧を調整するための過給圧調整信号、電動エアコンを作動させるための電動エアコン駆動信号、電動機MG1およびMG2の作動を指令する指令信号、シフトインジケータを作動させるためのシフトポジション(操作位置)表示信号、変速比を表示させるための変速比表示信号、スノーモードであることを表示させるためのスノーモード表示信号、制動時の車輪のスリップを防止するABSアクチュエータを作動させるためのABS作動信号、Mモードが選択されていることを表示させるMモード表示信号、電気式差動部11および無段変速部20の油圧アクチュエータを制御するために油圧制御回路72(図8参照)に含まれる電磁ソレノイド弁を作動させるバルブ指令信号、その電磁ソレノイド弁に供給されるライン圧を調整するためのライン圧コントロールソレノイド弁を作動させるバルブ指令信号、油圧制御回路72の油圧源である電動油圧ポンプを作動させるための駆動指令信号、電動ヒータを駆動するための信号、クルーズコントロール制御用コンピュータへの信号等が、それぞれ出力される。
【0070】
−シフト操作装置66−
図7は複数種類のシフトポジションPSHを人為的操作により切り替える切替装置としてのシフト操作装置66の一例を示す図である。このシフト操作装置66は、例えば運転席近傍に配設され、複数種類のシフトポジションPSHを選択するために操作されるシフトレバー68を備えている。
【0071】
そのシフトレバー68は、駆動装置10内の動力伝達経路が遮断されたニュートラル状態すなわち中立状態とし且つ出力軸22をロックするための駐車ポジション「P(パーキング)」、後進走行のための後進走行ポジション「R(リバース)」、駆動装置10内の動力伝達経路が遮断された中立状態とするための中立ポジション「N(ニュートラル)」、駆動装置10の変速可能なトータル変速比γTの変化範囲内で自動変速制御を実行させる前進走行ポジション「D(ドライブ)」、またはマニュアル走行モード(手動モード)を成立させて上記自動変速制御における高速側の変速段を制限する所謂変速レンジを設定するための前進マニュアル走行ポジション「M(マニュアル)」へ手動操作されるように設けられている。
【0072】
そして、上記シフトレバー68の手動操作により選択されたシフトポジションPSHに応じて例えば油圧制御回路72が電気的に切り替えられて、駆動装置10内の動力伝達経路が上記選択されたシフトポジションPSHに応じたものに変更される。例えば、シフトポジションPSHとして「P」ポジションまたは「N」ポジションが選択された場合には、切替クラッチC0と切替ブレーキB0とが共に解放され、第1電動機MG1と第2電動機MG2とが自由回転状態にされ、駆動装置10内の動力伝達経路が動力伝達遮断状態にされる。
【0073】
<制御部>
図8は、上記電子制御装置60による制御機能の要部を説明する機能ブロック線図である。図8において、ハイブリッド制御部74は、電気式差動部11の差動状態において、エンジン8を効率の高い作動域で作動させる一方で、エンジン8と第2電動機MG2との駆動力の配分や第1電動機MG1の発電による反力が最適になるように変化させて電気式差動部11の電気的な無段変速機としての変速比γ0を制御する。例えば、そのときの走行車速において、運転者の出力要求量としてのアクセル開度(アクセルペダル操作量)Accや車速Vから車両の目標(要求)出力を算出し、車両の目標出力と充電要求値とから必要なトータル目標出力を算出し、そのトータル目標出力が得られるように、伝達損失、補機負荷、第2電動機MG2のアシストトルク等を考慮して目標エンジン出力を算出する。そして、その目標エンジン出力が得られるエンジン回転数NEとエンジントルクTEとなるようにエンジン8を制御するとともに第1電動機MG1の発電量を制御する。
【0074】
ハイブリッド制御部74は、その制御を動力性能や燃費向上などのために無段変速部20の変速比γCVTを考慮して実行する。このようなハイブリッド制御では、エンジン8を効率のよい作動域で作動させるために定まるエンジン回転数NEと車速Vおよび無段変速部20の変速比γCVTで定まる伝達部材18の回転数N18とを整合させるために、電気式差動部11が電気的な無段変速機として機能させられる。すなわち、後述する電気式差動部11の差動領域にある場合、ハイブリッド制御部74は例えば図9の燃費マップに示すようなエンジン回転数NEとエンジン8の出力トルク(エンジントルク)TEとをパラメータとする二次元座標内において無段変速走行の時に運転性と燃費性とを両立するようにすなわちエンジン8の燃費向上のために予め実験的に定められたエンジン8の動作曲線である燃焼効率最適線LEF(最適燃費率曲線LEF、燃費マップ)を予め記憶しており、その燃焼効率最適線LEFに沿ってエンジン8が作動させられるように、例えば目標出力(トータル目標出力、要求駆動力)を充足するために必要なエンジン出力を発生するためのエンジントルクTEとエンジン回転数NEとなるように駆動装置10のトータル変速比γTの目標値を定め、その目標値が得られるように電気式差動部11の変速比γ0を制御する。
【0075】
このとき、ハイブリッド制御部74は、第1電動機MG1により発電された電気エネルギを、インバータ92を通して蓄電装置94や第2電動機MG2へ供給するので、エンジン8の動力の主要部は機械的に伝達部材18へ伝達されるが、エンジン8の動力の一部は第1電動機MG1の発電のために消費されてそこで電気エネルギに変換され、インバータ92を通してその電気エネルギが第2電動機MG2へ供給され、その第2電動機MG2が駆動されて第2電動機MG2から伝達部材18へ伝達される。この電気エネルギの発生から第2電動機MG2で消費されるまでに関連する機器により、エンジン8の動力の一部を電気エネルギに変換し、その電気エネルギを機械的エネルギに変換するまでの電気パスが構成される。
【0076】
ハイブリッド制御部74は、スロットル制御のためにスロットルアクチュエータ97により電子スロットル弁96を開閉制御させる他、燃料噴射制御のために燃料噴射装置98による燃料噴射量や噴射時期を制御させ、点火時期制御のためにイグナイタ等の点火装置99による点火時期を制御させる指令を単独で或いは組み合わせてエンジン出力制御装置71に出力して必要なエンジン出力を発生するようにエンジン8の出力制御を実行するエンジン出力制御部を機能的に備えている。例えば、ハイブリッド制御部74は、基本的には図示しない予め記憶された関係からアクセル開度信号Accに基づいてスロットルアクチュエータ97を駆動し、アクセル開度Accが増加するほどスロットル弁開度θTHを増加させるようにスロットル制御を実行する。
【0077】
図10の実線Aは、車両の発進/走行用(以下、走行用という)の駆動力源をエンジン8と電動機例えば第2電動機MG2とで切り替えるための、言い換えればエンジン8を走行用の駆動力源として車両を発進/走行(以下、走行という)させる所謂エンジン走行と、第2電動機MG2を走行用の駆動力源として車両を走行させる所謂モータ走行とを切り替えるための、エンジン走行領域とモータ走行領域との境界線である。この図10に示すエンジン走行とモータ走行とを切り替えるための境界線(実線A)を有する予め記憶された関係は、車速Vとアクセル開度Accとをパラメータとする二次元座標で構成された駆動力源切替線図(駆動力源マップ)の一例である。この駆動力源切替線図は例えばハイブリッド制御部74に予め記憶されている。
【0078】
そして、ハイブリッド制御部74は、例えば図10の駆動力源切替線図から車速Vとアクセル開度Accとで示される車両状態に基づいてモータ走行領域とエンジン走行領域との何れであるかを判断してモータ走行またはエンジン走行を実行する。このように、ハイブリッド制御部74によるモータ走行は、図10から明らかなように一般的にエンジン効率が高トルク域に比較して悪いとされる比較的低アクセル開度Acc時すなわち低エンジントルクTE時、または車速Vの比較的低車速時すなわち低負荷域で実行される。
【0079】
このモータ走行時には、停止しているエンジン8の引き摺りを抑制して燃費を向上させるために、電気式差動部11の差動作用によりエンジン回転数NEを零乃至略零にする。
【0080】
ハイブリッド制御部74はエンジン走行とモータ走行とを選択的に切り替える。そのためにハイブリッド制御部74は、エンジン8の始動および停止を行うエンジン始動停止制御部76を備えている。このエンジン始動停止制御部76は、ハイブリッド制御部74により例えば図10の駆動力源切替線図から車両状態に基づいてモータ走行とエンジン走行との切替えが判断された場合に、エンジン8の始動または停止を実行する。
【0081】
例えば、エンジン始動停止制御部76は、図10の実線Bの点a→点bに示すようにアクセルペダルが踏込操作されてアクセル開度Accが大きくなり車両状態がモータ走行領域からエンジン走行領域へ変化した場合には、第1電動機MG1に通電して第1電動機回転数NMG1を引き上げることで、すなわち第1電動機MG1をスタータとして機能させることで、例えば自立回転可能な回転数にまでエンジン回転数NEを引き上げ点火装置99により点火させ、エンジン8の始動を行って、モータ走行からエンジン走行へ切り替える。このとき、エンジン始動停止制御部76は、第1電動機回転数NMG1を速やかに引き上げることで、アイドル回転数NEIDL以下のエンジン回転数領域における共振領域を速やかに回避してエンジン始動を行い、その始動時の振動を抑制するようにしてもよい。
【0082】
また、エンジン始動停止制御部76は、図10の実線Bの点b→点aに示すように、アクセルペダルが戻されてアクセル開度Accが小さくなり車両状態がエンジン走行領域からモータ走行領域へ変化した場合には、燃料噴射装置98による燃料供給を停止させることにより、すなわちフューエルカットによりエンジン8の停止を行って、エンジン走行からモータ走行へ切り替える。このとき、エンジン始動停止制御部76は、第1電動機回転数NMG1を速やかに引き下げることでエンジン回転数NEを速やかに零乃至略零まで引き下げてもよい。これにより、上記共振領域を速やかに回避できて停止時の振動が抑制される。
【0083】
また、ハイブリッド制御部74は、エンジン走行領域であっても、蓄電装置94からの電気エネルギを第2電動機MG2へ供給し、その第2電動機MG2を駆動してエンジン8の動力を補助するトルクアシストが可能である。よって、本実施形態ではエンジン8と第2電動機MG2との両方を走行用の駆動力源とする車両の走行はモータ走行ではなくエンジン走行に含まれるものとする。
【0084】
また、ハイブリッド制御部74は、車両の停止状態または低車速状態に拘わらず、電気式差動部11の電気的CVT機能(差動作用)によってエンジン8の運転状態を維持させることができる。例えば、車両停止時に蓄電装置94の充電残量SOCが低下して第1電動機MG1による発電が必要となった場合には、エンジン8の動力により第1電動機MG1が発電状態でその第1電動機MG1の回転数が引き上げられ、第2電動機回転数NMG2が車両停止状態により零(略零)となっても動力分配機構16の差動作用によってエンジン回転数NEは自立回転可能な回転数以上に維持される。
【0085】
また、ハイブリッド制御部74は、車両の停止中または走行中に拘わらず、電気式差動部11の電気的CVT機能によって第1電動機回転数NMG1および/または第2電動機回転数NMG2を制御してエンジン回転数NEを任意の回転数に維持させられる。例えば、図5の共線図からもわかるようにハイブリッド制御部74はエンジン回転数NEを引き上げる場合には、第2電動機回転数NMG2を略一定に維持しつつ第1電動機回転数NMG1の引き上げを実行する。
【0086】
切替制御部78は、車両状態に基づいて上記差動状態切替装置(切替クラッチC0、切替ブレーキB0)の係合/解放を切り替えることにより、電気式差動部11の上記無段変速状態と有段変速状態とを、すなわち上記差動状態と上記ロック状態とを選択的に切り替える。例えば、切替制御部78は、上記図10と同じ座標系に表された破線、一点鎖線及び二点鎖線で示す差動状態切替線図(差動状態切替マップ)を予め記憶しており、その差動状態切替線図から車速Vおよびアクセル開度Accで示される車両状態に基づいて切替ブレーキB0または切替クラッチC0を係合(ロック)させるべきか否かを判断して、油圧制御回路72へ指令信号を出力することにより切替ブレーキB0または切替クラッチC0を係合させ、或いは切替ブレーキB0および切替クラッチC0を解放させる。例えば、アクセル開度Accが図10の判定アクセル開度Acc1を超えた高開度である場合には車両状態がC0ロック領域にあるので、切替制御部78は切替クラッチC0を係合させ電気式差動部11の変速比γ0を「1」に固定する(変速比がローに固定される)。また、アクセル開度Accが比較的低いため車両状態が上記C0ロック領域には入らず車速Vが図10の判定車速V1を超えた高車速である場合には車両状態がB0ロック領域にあるので、切替制御部78は切替ブレーキB0を係合させ電気式差動部11を変速比γ0が「0.696」で固定された増速変速機として機能させる(変速比がハイに固定される)。
【0087】
そして、切替制御部78は、切替ブレーキB0または切替クラッチC0を係合させた場合にはハイブリッド制御部74に対して電気式差動部11を電気的な無段変速機として機能させる差動制御を禁止し、一方、図10において低アクセル開度Acc、低車速Vの車両状態、すなわち車両状態が上記B0ロック領域にもC0ロック領域にも属さない電気式差動部11の無段制御領域である場合には切替ブレーキB0及び切替クラッチC0を解放させ、ハイブリッド制御部74に対して上記差動制御を許可する。
【0088】
尚、上述した如く、車速Vおよびアクセル開度Accで示される車両状態に基づいて切替ブレーキB0または切替クラッチC0を係合(ロック)させるべきか否かを判断する具体的な技術的思想については後述することとする。
【0089】
ここで上記図10について詳述すると、図10の太い破線は切替制御部78による電気式差動部11の無段制御領域とC0ロック領域との判定のための判定アクセル開度Acc1を示し、図10の太い一点鎖線は電気式差動部11の無段制御領域とB0ロック領域との判定のための判定車速V1を示しており、判定アクセル開度Acc1を超えた高アクセル開度Accであって判定車速V1を超えた高車速Vである場合にはC0ロック領域となっている。更に、図10の太い破線、太い一点鎖線、太い二点鎖線で示される判定アクセル開度Acc1と判定車速V1とには、それぞれ、細い破線、細い一点鎖線、細い二点鎖線で示されるようにヒステリシスが設けられている。なお、この図10の差動状態切替線図は判定アクセル開度Acc1および判定車速V1の少なくとも1つを含むものであってもよいし、アクセル開度Accおよび車速Vの何れかをパラメータとする予め記憶された切替線であってもよい。
【0090】
また、電気式差動部11を電気的な無段変速機として作動させるための電動機等の電気系の制御機器の故障や機能低下時、例えば第1電動機MG1における電気エネルギの発生からその電気エネルギが機械的エネルギに変換されるまでの電気パスに関連する機器の機能低下すなわち第1電動機MG1、第2電動機MG2、インバータ92、蓄電装置94、それらを接続する伝送路などの故障(フェイル)や、故障とか低温による機能低下が発生したような車両状態となる場合には、電気式差動部11の無段制御領域であっても車両走行を確保するために切替制御部78は優先的に切替ブレーキB0または切替クラッチC0を係合させてもよい。
【0091】
また、例えば判定車速V1は、高速走行において電気式差動部11が差動状態とされると返って燃費が低下するので、これを抑制するように、その高速走行において電気式差動部11が非差動状態となる。また、判定アクセル開度Acc1は、車両の高出力走行において第1電動機MG1の反力トルクをエンジン8の高出力域まで対応させない。
【0092】
このように、本実施形態の電気式差動部11(駆動装置10)は無段変速状態と有段変速状態(定変速状態)とに選択的に切替え可能であって、上記切替制御部78により車両状態に基づいて電気式差動部11の切り替えるべき変速状態が判断され、電気式差動部11が無段変速状態と有段変速状態とのいずれかに選択的に切り替えられる(この切り替えに関する技術的思想については後述する)。また、本実施形態では、ハイブリッド制御部74により車両状態に基づいてモータ走行或いはエンジン走行が実行されるが、このエンジン走行とモータ走行とを切り替えるために、エンジン始動停止制御部76によりエンジン8の始動または停止が行われる。
【0093】
無段変速制御部80は、油圧制御回路72へ指令信号を出力し、上記パワーローラ26を傾転させることにより無段変速部20の変速比γCVTを変化させて無段変速部20の変速を行う変速制御部として機能するものである。例えば、無段変速制御部80は、電気式差動部11の差動状態に応じて予め設定された車速Vおよびアクセル開度Accとの関係から変速比γCVTを決定し、その変速比γCVTが得られるように無段変速部20の変速制御を実行する。
【0094】
ここで、ハイブリッド制御部74による電気式差動部11の変速比γ0の制御によってエンジン走行中は燃費向上のため、エンジン回転数NE及びエンジントルクTEなどで示されるエンジン8の動作状態を示すエンジン動作点PEG(図9参照)が燃焼効率最適線LEFに沿うように(燃費最適点となるように)エンジン8が作動させられるが、更に、電気式差動部11におけるエンジン8からの出力(駆動エネルギ)の伝達効率η11を向上させて車両全体としての燃費向上が図られる。その制御機能の要部について以下に説明する。
【0095】
無段変速制御部80は、上述のように無段変速部20の変速制御を実行するが、エンジン走行中において電気式差動部11が差動状態(無段変速状態)である場合には図11に示される車速Vと無段変速部20の変速比γCVTとの関係を定める無段変速部変速比マップから車速Vに基づいて無段変速部20の変速比γCVTを決定(設定)する。この図11の無段変速部変速比マップは、その無段変速部変速比マップに従って車速Vから上記変速比γCVTが決定され燃焼効率最適線LEF上のエンジン動作点PEGでエンジン8が作動させられた場合に理想的には第1電動機回転数NMG1が零乃至は略零になるように、つまり図5の共線図で第1電動機回転数NMG1が回転停止を示すメカニカルロック点になるように予め実験等により求められ設定された車速Vと変速比γCVTとの関係で設定されている。従って、図11により無段変速部20の変速比γCVTを決定する無段変速制御部80は車速Vおよび燃焼効率最適線LEFに基づき、その燃焼効率最適線LEFにエンジン動作点PEGが沿うように無段変速部20の変速比γCVTを設定すると言える。そして、第1電動機回転数NMG1が零に近付くほど電気式差動部11の伝達効率η11は向上するので、図11に従って決定される無段変速部20の変速比γCVTである基本変速比は、上記電気式差動部11の伝達効率η11が充分に高くなるように、具体的に表現すればその伝達効率η11が予め定められた下限値以上になるように設定(決定)された変速比であると言える。
【0096】
また、無段変速制御部80は、上記切替ブレーキB0が係合され、第1電動機MG1がメカニカルロック点に維持されて、その回転が停止された場合にも、図11に示される車速Vと無段変速部20の変速比γCVTとの関係を定める無段変速部変速比マップから車速Vに基づいて無段変速部20の変速比γCVTを決定(設定)する。また、切替クラッチC0が係合されて、第1電動機MG1が入力軸14と一体的に回転する状態となった場合には、エンジン動作点PEGが上記燃焼効率最適線LEFに沿うよう、上記切替ブレーキB0が係合された場合に比べて変速比γCVTが小さく設定されるようになっている。
【0097】
上記ハイブリッド制御部74は電気式差動部11の伝達効率η11を高めるために差動制御部82を有している。エンジン走行中において電気式差動部11が差動状態(無段変速状態)である場合に、無段変速制御部80が図11の無段変速部変速比マップにより無段変速部20の変速比γCVTを決定すると差動制御部82は、電気式差動部11におけるエンジン8からの出力の伝達効率η11を高めるように第1電動機回転数NMG1を制御して電気式差動部11の変速比γ0を決定(設定)し変更する。電気式差動部11の伝達効率η11は第1電動機MG1と第2電動機MG2との間の電気パスに伝達される電気エネルギである電気パス量すなわち第1電動機MG1の電力が零に近付くほど向上するので、差動制御部82は、差動用電動機である第1電動機MG1の電力を零に近付けることによって上記電気式差動部11の伝達効率η11を高める。
【0098】
具体的に差動制御部82は、第1電動機MG1の電力を零に近付けることによって上記電気式差動部11の伝達効率η11を高めるため、上記電気式差動部11の伝達効率η11が充分に高いと見ることができる電気パス許容範囲内に第1電動機MG1の電力(電気パス量)が入っているか否かを判断する。その判断が肯定的である場合、すなわち、上記電気パス量が上記電気パス許容範囲内に入っている場合には、差動制御部82は現状の第1電動機回転数NMG1を維持する。一方、上記判断が否定的である場合には、差動制御部82は、図12に示されるような第1電動機回転数NMG1を零に近付ける方向に補正するための第1電動機回転数変更値ΔNMG1と上記電気パス量との予め設定された関係からその電気パス量すなわち第1電動機MG1の電力に基づき第1電動機回転数変更値ΔNMG1を決定し、第1電動機回転数NMG1を零に近付ける方向すなわち上記電気パス量を零に近付ける方向に第1電動機回転数NMG1を第1電動機回転数変更値ΔNMG1だけ補正する。第1電動機回転数変更値ΔNMG1と上記電気パス量との関係は、図12のように上記電気パス量が蓄電装置94の放電側に行くほど第1電動機回転数変更値ΔNMG1が大きくなる関係であってもよいし、図12と同様に第1電動機回転数変更値ΔNMG1の正負は原点を境に反転するが上記電気パス量に関わらず第1電動機回転数変更値ΔNMG1の絶対値が一定である関係であってもよい。差動制御部82は、上記第1電動機回転数NMG1についての補正をした場合には、再び上記電気パス許容範囲内に第1電動機MG1の消費電力(電気パス量)が入っているか否かを判断する。このように差動制御部82は、上記第1電動機MG1の電力(電気パス量)についての判断が肯定されるまでその判断と上記第1電動機回転数NMG1についての補正とを繰り返す。
【0099】
上述のように差動制御部82は、第1電動機MG1の電力を零に近付けることによって上記電気式差動部11の伝達効率η11を高めるが、第1電動機回転数NMG1が零に近付くほど上記第1電動機MG1の電力は零に近付くので、差動制御部82は第1電動機回転数NMG1を零に近付けることによって上記電気式差動部11の伝達効率η11を高めてもよい。そのような場合には、差動制御部82が行う判断における上記電気パス許容範囲は、第1電動機回転数NMG1についての許容範囲である第1電動機回転数許容範囲に置き替わり、差動制御部82はその第1電動機回転数許容範囲内に第1電動機回転数NMG1が入っているか否かを判断し、第1電動機回転数変更値ΔNMG1を決定するための図12では横軸が上記電気パス量から第1電動機回転数NMG1に置き替わる。
【0100】
このようにして無段変速制御部80が図11の無段変速部変速比マップにより無段変速部20の変速比γCVTを決定し、更に差動制御部82が上記電気パス量または第1電動機回転数NMG1を零に一層収束させることによって、上記電気式差動部11の伝達効率η11が高められることとなる。
【0101】
図13は、本実施形態の電子制御装置60の制御作動の要部すなわちエンジン走行中において電気式差動部11が差動状態(無段変速状態)である場合に電気式差動部11の伝達効率η11を向上させるための制御作動を説明するフローチャートであり、例えば数msec〜数十msec程度の極めて短いサイクルタイムで繰り返し実行される。
【0102】
先ず、ステップ(以下、「ステップ」を省略する)SA1においては、上記第1電動機回転数変更値ΔNMG1が初期化される。具体的には、第1電動機回転数変更値ΔNMG1が零に設定される。SA1の次はSA2へ移る。
【0103】
無段変速制御部80に対応するSA2においては、図11の無段変速部変速比マップから車速Vに基づいて無段変速部20の変速比γCVTが決定される。そして、その変速比γCVTが実現されるように、上述したパワーローラ26の傾転が行われる。SA2の次はSA3に移る。
【0104】
SA3においては、第1電動機回転数NMG1を零に近付ける方向すなわち上記電気パス量を零に近付ける方向に第1電動機回転数NMG1が第1電動機回転数変更値ΔNMG1だけ補正される。具体的には、目標とされる第1電動機回転数NMG1が現在の第1電動機回転数NMG1に第1電動機回転数変更値ΔNMG1を加算した回転数に設定変更され、その目標とされる第1電動機回転数NMG1になるように第1電動機MG1が制御される。SA3の次はSA4へ移る。
【0105】
SA4においては、第1電動機MG1の電力(電気パス量)が上記電気パス許容範囲内に入っているか否かが判断される。例えば、上記電気パス許容範囲はその範囲内に零を含みその上限値および下限値の絶対値が予め実験的に定められた闘値XEとされており、上記電気パス量の絶対値がその闘値XE以下か否かが判断される。ここで、上記電気パス量としては第1電動機MG1の電力が用いられているが、別の物理値、例えば第1電動機MG1の制御電流値が上記電気パス量として用いられてもよい。第1電動機MG1の制御電流値とは上記消費電力に対応する駆動電流値(消費電流値)または上記出力電力に対応する発電電流値をいう。この判断が肯定的である場合、すなわち、第1電動機MG1の電力(電気パス量)が上記電気パス許容範囲内に入っている場合には本フローチャートは終了する。一方、この判断が否定的である場合にはSA5に移る。
【0106】
上記SA4の判断対象は上記第1電動機MG1の電力(電気パス量)であるが、それに代えて第1電動機回転数NMG1について判断されてもよい。その場合にはSA4は図14のように置き替わりSA4において、例えば、上限値および下限値の絶対値が予め実験的に定められた閾値XNMG1とされた第1電動機回転数許容範囲内に第1電動機回転数NMG1が入っているか否か、言い換えれば、第1電動機回転数NMG1の絶対値が上記閾値XNMG1以下か否かが判断される。
【0107】
SA5においては、図12に示されるような第1電動機回転数変更値ΔNMG1と上記電気パス量との予め設定された関係からその電気パス量すなわち第1電動機MG1の電力に基づき第1電動機回転数変更値ΔNMG1が決定される。SA5の次はSA3に移る。なお、上記SA1、SA3、SA4及びSA5は、差動制御部82に対応する。
【0108】
また、無段変速制御部80の制御としては、エンジン走行中において電気式差動部11が差動状態(無段変速状態)である場合に、以下に述べるような変速制御を実行するようにしてもよい。つまり、無段変速部20の上記基本変速比として図11の無段変速部変速比マップにより無段変速部20の変速比γCVTを決定した後、電気式差動部11におけるエンジン8からの出力の伝達効率η11と無段変速部20における伝達効率ηCVTとの乗算値ηP(以下、「乗算効率ηP」という)を高めるように無段変速部20の変速比γCVTを決定(設定)し変更する。
【0109】
詳細に言うと、図15に示すような電気式差動部11の変速比γ0に応じて変化する上記変速比γCVTと乗算効率ηPとの関係である伝達効率乗算値マップが実験的に求められ無段変速制御部80に予め記憶されており、無段変速制御部80は、電気式差動部11の変速比γ0をエンジン回転数NEと第2電動機回転数NMG2とから検出し、図15の伝達効率乗算値マップとその検出された変速比γ0とに基づいて現在の無段変速部20の変速比γCVTに対応する乗算効率ηPを把握する。その上で無段変速制御部80は、図15の伝達効率乗算値マップ上でその乗算効率ηPがより高くなるように、図11の無段変速部変速比マップにより決定された無段変速部20の上記基本変速比に対して上記変速比γCVTの補正を行い、その変速比γCVTを決定(設定)し変更する。ここで、図11の無段変速部変速比マップに従って無段変速部20の変速比γCVTが上記基本変速比に設定されることで電気式差動部11においては理想的には第1電動機回転数NMG1が零乃至は略零になってその伝達効率η11は高められることとなるので、上記基本変速比に対する変速比γCVTの補正は上記乗算効率ηP(η11×ηCVT)がより高くなるようにすることではあるが専ら無段変速部20の伝達効率ηCVT(以下、「CVT効率ηCVT」という)がより高くなるようにすることである。
【0110】
具体的に無段変速制御部80は、図11の無段変速部変速比マップにより無段変速部20の変速比γCVTを決定した後、図15の伝達効率乗算値マップから現在の電気式差動部11の変速比γ0に対応する伝達効率曲線Lηを選択し、その選択された伝達効率曲線Lηにおいて現在の無段変速部20の変速比γCVTに対応する乗算効率ηPが点PMAX(図15参照)で示される最高効率から所定量低い伝達効率下限判定値以下であるか否かを判断する。この伝達効率下限判定値は乗算効率ηPが充分に高いと見ることができる乗算効率ηPの目標範囲の下限値である。その判断が否定的である場合、すなわち、上記乗算効率ηPが上記伝達効率下限判定値を超えている場合には、無段変速制御部80は、現状の無段変速部20の変速比γCVTを維持する。一方、上記判断が肯定的である場合、すなわち、乗算効率ηPが上記伝達効率下限判定値以下である場合には、無段変速制御部80は、最高効率を示す点PMAX(図15参照)に対応した目標となる変速比γCVTと現状の変速比γCVTとの差を求めその差を変速比γCVTの補正量である変速比変更値ΔγCVTとし、乗算効率ηPが高くなる方向すなわち上記点PMAXに近付く方向に無段変速部20の変速比γCVTを変速比変更値ΔγCVTだけ補正する。このとき、無段変速部20の変速比γCVTが大きく変動しないようにするために変速比変更値ΔγCVTの上限値である補正ガード値が予め設けられており、無段変速制御部80は変速比変更値ΔγCVT(絶対値)がその補正ガード値を超えない範囲内で無段変速部20の変速比γCVTを補正する。従って、無段変速制御部80は図15から求めた変速比変更値ΔγCVTの絶対値が上記補正ガード値を超えた場合にはその絶対値がその補正ガード値にまで小さくされるガード処理をした上で、上記無段変速部20の変速比γCVTの補正をする。図15に例示されるように、無段変速部20の変速比γCVTが変速比変更値ΔγCVTだけ一度補正されただけでは、その補正後の乗算効率ηPは上記伝達効率下限判定値を超えないことがある。無段変速制御部80は、上記無段変速部20の変速比γCVTの補正をした場合には、再び乗算効率ηPが上記伝達効率下限判定値以下であるか否かを判断する。このように無段変速制御部80は、乗算効率ηPについての判断と無段変速部20の変速比γCVTの補正とを繰り返す。
【0111】
無段変速制御部80が上記無段変速部20の変速比γCVTの補正をすることは、上述したように、専ら無段変速部20のCVT効率ηCVTがより高くなるようにすることでもあるので、無段変速制御部80はその判断対象を乗算効率ηPではなくCVT効率ηCVTとしてもよい。そのようにした場合には、図15の伝達効率乗算値マップはその縦軸を無段変速部20のCVT効率ηCVTとした無段変速部伝達効率マップに置き替わり、無段変速制御部80は、乗算効率ηPについてではなく、現在の無段変速部20の変速比γCVTに対応するCVT効率ηCVTが点PMAX(図15参照)で示される最高効率から所定量低いCVT効率下限判定値以下であるか否かを判断する。
【0112】
図16は、このような無段変速部20の変速比γCVTの補正を行う場合の制御作動の要部すなわちエンジン走行中において電気式差動部11が差動状態(無段変速状態)である場合に上記乗算効率ηPを向上させるための制御作動を説明するフローチャートであり、例えば数msec〜数十msec程度の極めて短いサイクルタイムで繰り返し実行される。
【0113】
先ず、SB1においては、無段変速部20の変速比γCVTが補正される場合の補正量である上記変速比変更値ΔγCVTが初期化される。具体的には、変速比変更値ΔγCVTが零に設定される。SB1の次はSB2へ移る。
【0114】
SB2においては、無段変速部20の上記基本変速比として図11の無段変速部変速比マップから車速Vに基づいて無段変速部20の変速比γCVTが決定される。SB2の次はSB3に移る。
【0115】
SB3においては、乗算効率ηPが高くなる方向すなわち図15において点PMAXに近付く方向に無段変速部20の変速比γCVTが、後述のSB5およびSB6にて設定変更される変速比変更値ΔγCVTだけ補正される。具体的には、目標とされる無段変速部20の変速比γCVTが現在の変速比γCVTに変速比変更値ΔγCVTを加算した変速比に設定変更され、その目標とされる変速比γCVTになるように、無段変速部20において上述したパワーローラ26の傾転が行われる。SB3の次はSB4へ移る。
【0116】
SB4においては、図15の伝達効率乗算値マップから現在の電気式差動部11の変速比γ0に対応する伝達効率曲線Lηが選択され、その選択された伝達効率曲線Lηにおいて現在の無段変速部20の変速比γCVTに対応する乗算効率ηPが上記伝達効率下限判定値以下であるか否かが判断される。ここで、本来的にはその乗算効率ηPが図15の伝達効率乗算値マップでの上記最高効率に達していないか否かが判断されるべきところ制御負荷軽減のため上記伝達効率下限判定値を用いて判断される。この判断が肯定的である場合、すなわち、上記乗算効率ηPが伝達効率下限判定値以下である場合にはSB5に移る。一方、この判断が否定的である場合には本フローチャートは終了する。
【0117】
上記SB4の判断対象は上記乗算効率ηPであるが、それに代えて無段変速部20のCVT効率ηCVTについて判断されてもよい。その場合にはSB4は図17のように置き替わり、SB4においては、縦軸を無段変速部20のCVT効率ηCVTとした上記無段変速部伝達効率マップとしての図15に基づいて、現在の無段変速部20の変速比γCVTに対応するCVT効率ηCVTが上記CVT効率下限判定値以下であるか否かが判断される。
【0118】
SB5においては、最高効率を示す点PMAX(図15参照)に対応した目標となる変速比γCVTと現状の変速比γCVTとの差が求められ、その差が変速比変更値ΔγCVTと決定される。SB5の次はSB6に移る。
【0119】
SB6においては変速比変更値ΔγCVTの上記ガード処理がなされる。具体的には、SB5にて決定された変速比変更値ΔγCVTの絶対値が予め設けられている上記補正ガード値を超えた場合にはその絶対値がその補正ガード値にまで小さくされて上記変速比変更値ΔγCVTが修正される。従って、SB5にて決定された変速比変更値ΔγCVTはSB6を経て確定する。SB6の次はSB3に移る。なお、上記SB1〜SB6は無段変速制御部80に対応する。
【0120】
このようにして、乗算効率ηPが最高効率PMAXとなるように制御する場合、エンジン動作点PEGが上記燃焼効率最適線LEFに沿うようにエンジン8の制御が行われると、第1電動機回転数NMG1はメカニカルロック点から外れる可能性があるが、この場合、本実施形態では、乗算効率ηPが最高効率PMAXとなることを優先し、第1電動機回転数NMG1がメカニカルロック点から外れることを許容する。
【0121】
次に、上述した如く、車速Vおよびアクセル開度Accで示される車両状態に基づいて切替ブレーキB0または切替クラッチC0を係合(ロック)させるべきか否かを判断する具体的な技術的思想について説明する。
【0122】
この技術的思想は、上記電気式差動部11の差動を制限(例えば切替ブレーキB0を係合)して無段変速部20で総合無段変速比γT(=入力軸14の回転数NIN/出力軸22の回転数NOUT)を変更する場合と、上記電気式差動部11を差動させ、この電気式差動部11と無段変速部20とで総合無段変速比γTを変更する場合とのそれぞれの燃費を車両の走行条件に応じて比較し、燃費の良い方を使用するといったものである。
【0123】
具体的には、以下に(1)および(2)で示す運転状態を比較し、燃費の良い方を使用するといったものである。
(1)切替ブレーキB0または切替クラッチC0を係合(ロック)させることで、第1電動機MG1をロックしたり、電気式差動部11の第3回転要素(差動部サンギヤS0、差動部キャリヤCA0、差動部リングギヤR0)を一体回転させる非差動状態とした場合であって、エンジン動作点PEGが上記燃焼効率最適線LEFに沿うようにエンジン8の制御を行った場合。
(2)切替クラッチC0および切替ブレーキB0を共に解放させることで、電気式差動部11を電気的な無段変速機として機能させた場合であって、無段変速部20の変速比を伝達効率の最も高い変速比(上述した図15から求まる変速比)に設定した場合に、エンジン動作点PEGが上記燃焼効率最適線LEFに沿うようにエンジン8の制御を行った場合。
【0124】
このような各運転状態を比較し、燃費の良い方を使用する。具体的には、これら各運転状態での燃費を実験等で予め計測しておき、車速、エンジン回転数、アクセル開度等をパラメータとして、上記(1)(2)のうちの何れを選択すべきかを予めアップ化しておき、実際の車両走行時には、このマップを参照することで上記(1)(2)のうちの何れかの運転状態が設定されるようになっている。このようにして作成されたものが、図10で示した差動状態切替マップである。つまり、この図10で示すマップに従って切替クラッチC0や切替ブレーキB0の係合および解放を調整することにより、上記(1)(2)のうち燃費の良い方を使用した運転が実現されることになる。言い換えると、電気式差動部11の差動を制限したことによる電気パス量の変化と、無段変速部20の変速比が変化することによるその伝達効率の変化とを比較対象とし、この両者のうち燃費の良い方を使用して運転が行われる。
【0125】
また、上述したような差動状態切替マップに従って上記(1)(2)の何れかの運転状態を選択するものに代えて、現在の車両走行状態から、各種判定を経て上記(1)(2)の何れかの運転状態を選択するようにしてもよい。この場合の判定手順を図18のフローチャートに沿って説明する。このフローチャートに示す制御は、車両の走行中であって、例えば数msec〜数十msec程度の極めて短いサイクルタイムで繰り返し実行される。
【0126】
図18のフローチャートにおいて、先ず、SC1では、車両の走行条件を読み込む。例えば、車速、アクセル開度、エンジン回転数、冷却水温度、シフトポジション等を読み込む。その後、SC2に移り、現在の車両走行状態が強制領域となっているか否かを判定する。この強制領域とは、電気式差動部11を強制的に差動状態(非ロック)としたり、強制的に非差動状態(ロック)とする場合である。例えば、車両の発進時には強制的に差動状態(非ロック)とされ、高トルク域では強制的に非差動状態(ロック)とされる(図10参照)。
【0127】
そして、上記強制領域となっておりSC2でYES判定された場合には、SC8に移り、その他の制御を実施する。つまり、上記(1)(2)のうちの何れを選択すべきかを判断して運転状態を設定するといった制御を実施することなく、現時点での強制領域に従って、電気式差動部11を強制差動状態または強制非差動状態にする。
【0128】
一方、上記強制領域となっておらずSC2でNO判定された場合には、SC3に移り、電気式差動部11のロック有利域(差動状態とするよりも非差動状態とする方が燃費が良好である)か否かを判定する。つまり、上記(1)(2)の各運転状態を比較し、切替ブレーキB0を係合(ロック)させた方が有利であるか否かを判定する。
【0129】
そして、電気式差動部11のロック有利域であり、SC3でYES判定された場合にはSC4に移り、電気式差動部11の差動制限(ロック)を実施し、SC5において、上記無段変速部20により総合変速比γTを変更する。つまり、電気式差動部11は差動制限によって変速比が固定されるので、無段変速部20の変速比を調整することで総合変速比γTを変更する。この場合、第1電動機MG1は強制的にロック点に設定されるため、上記電気パスの低減により動力伝達効率の向上が図れる。また、この場合、エンジン8は、エンジン動作点PEG(図9参照)が燃焼効率最適線LEFに沿うように(燃費最適点となるように)制御される。
【0130】
一方、電気式差動部11の非ロック有利域であり、SC3でNO判定された場合にはSC6に移り、電気式差動部11の差動制限を実施せず、つまり、差動状態として、SC7において、この電気式差動部11および上記無段変速部20により総合変速比γTを変更する。つまり、電気式差動部11の差動による変速比と無段変速部20の変速比とを調整することで総合変速比γTを変更する。
【0131】
尚、無段変速部20の変速比の制限から、エンジン8を燃費最適点で駆動できない場合、電気式差動部11をロックすると燃費の悪化を招くので、それを考慮し、電気式差動部11を差動させてエンジン8を燃費最適点で駆動させるようにしてもよい。この領域は、無段変速部20の伝達効率に影響されるため、この無段変速部20の油温に応じて変化させるようにしてもよい。また、燃料種によって、あるいは可変気筒(例えば、軽負荷時にはエンジン8が4気筒で駆動され高負荷時には8気筒で駆動されるような運転方式を行うもの)によるエンジンの燃費最適点が変更される場合にも、これに従って同様の動作を行わせる。
【0132】
<効果>
本実施形態によれば次のような効果(A1)〜(A10)がある。
【0133】
(A1)上述した如く、電気式差動部11の差動を制限して無段変速部20で総合変速比γTを変更する場合と、電気式差動部11を差動させ、この電気式差動部11と無段変速部20とで総合変速比γTを変更する場合とのうち燃費の良い方を使用した運転を実現できるようにしている。このため、これまでにない大幅な燃費の改善が可能な車両用駆動装置の制御を実現できる。
【0134】
(A2)図11により無段変速部20の変速比γCVTを決定する無段変速制御部80は車速Vおよび燃焼効率最適線LEFに基づき、その燃焼効率最適線LEFにエンジン動作点PEGが沿うように無段変速部20の変速比γCVTを設定すると言えるので、切替クラッチC0が係合されている状態、切替ブレーキB0が係合されている状態、切替クラッチC0および切替ブレーキB0が共に解放されている状態の何れにおいても上記エンジン8を最適燃費で運転することが可能であり、エンジン8の動作状態に起因した燃費の悪化を抑制できる。また、変速比γCVTを連続的に変化させることができる無段変速部20が電気式差動部11と駆動輪3との間の動力伝達経路の一部を構成しているので、第1電動機回転数NMG1が調整されることなく無段変速部20の変速比γCVTを変化させることによりエンジン回転数NEが車速Vに拘束されないようにすることが可能であり、電気式差動部11をその伝達効率η11の充分に高い所定の差動状態に維持しつつ燃焼効率最適線LEFにエンジン動作点PEGが沿うようにエンジン8を運転できる。
【0135】
(A3)差動制御部82は、電気式差動部11におけるエンジン8からの出力の伝達効率η11を高めるように第1電動機回転数NMG1を制御して電気式差動部11の変速比γ0を決定し変更するので、電気式差動部11の伝達効率η11低下による燃費の悪化を抑制できる。
【0136】
(A4)差動制御部82は、第1電動機MG1の電力を零に近付けることによって電気式差動部11の伝達効率η11を高めるので、電力例えば電圧一定であればその制御電流値を検出することにより上記伝達効率η11を高めることを容易に実施し得る。
【0137】
(A5)差動制御部82は第1電動機回転数NMG1を零に近付けることによって電気式差動部11の伝達効率η11を高めてもよく、そのようにした場合には、第1電動機回転数NMG1を検出することにより上記伝達効率η11を高めることを容易に実施し得る。
【0138】
(A6)無段変速制御部80は、電気式差動部11におけるエンジン8からの出力の伝達効率η11と無段変速部20における伝達効率ηCVTとの乗算値である乗算効率ηPを高めるように無段変速部20の変速比γCVTを決定(設定)し変更するので、電気式差動部11又は無段変速部20の伝達効率低下による燃費の悪化を抑制できる。
【0139】
(A7)無段変速制御部80は、上記乗算効率ηP(CVT効率ηCVT)がより高くなるように、図11の無段変速部変速比マップにより決定された無段変速部20の上記基本変速比に対して変速比γCVTの補正を行い、その変速比γCVTを決定し変更するので、図11による上記基本変速比の決定により上記乗算効率ηPがある程度高い状態から上記補正が開始されることとなり、効率的に無段変速部20の変速比γCVTを補正し設定できる。
【0140】
(A8)無段変速制御部80は、現在の無段変速部20の変速比γCVTに対応するCVT効率ηCVTが点PMAX(図15参照)で示される最高効率から所定量低いCVT効率下限判定値以下であるか否かを判断し、その判断が肯定的である場合には、上記点PMAXに近付く方向に無段変速部20の変速比γCVTを変速比変更値ΔγCVTだけ補正するので、充分に無段変速部20の伝達効率γCVTが高くなったところで上記補正が終了し制御負荷を軽減できる。
【0141】
(A9)予め上記補正ガード値が設けられており、無段変速制御部80は変速比変更値ΔγCVT(絶対値)がその補正ガード値を超えない範囲内で無段変速部20の変速比γCVTを補正するので、大幅に無段変速部20の変速比γCVTが変化することが回避され、乗員に違和感を生じさせないようすることが可能である。
【0142】
(A10)図15に示すような上記伝達効率乗算値マップが実験的に求められ無段変速制御部80に予め記憶されており、無段変速制御部80は、その伝達効率乗算値マップに基づいて無段変速部20の上記基本変速比に対して変速比γCVTの補正を行い、その変速比γCVTを決定(設定)し変更するので、その都度上記乗算効率ηPを算出する場合と比較して制御負荷を軽減できる。
【0143】
(第2実施形態)
図19は、第2実施形態の電子制御装置60による制御機能の要部を説明する機能ブロック線図である。この図19では第1実施形態の機能ブロック線図である図8に対し、エンジン燃焼方式制御部112とエンジン燃焼方式判定部114とが追加されている点が異なる。以下、その相違点について主に説明する。
【0144】
本実施形態のエンジン8は、理論空燃比の混合気を燃焼させるストイキ燃焼方式と理論空燃比よりも燃料が希薄な混合気を燃焼させるリーン燃焼方式との複数の燃料消費特性が異なる燃焼方式を備えており、走行状態に適した燃焼方式が採用される。図19のエンジン燃焼方式制御部112は、スロットル弁開度θTH、エンジン回転数NEなどからエンジン負荷を推定し、予め実験的に設定された条件に従いエンジン8の燃焼方式をそのエンジン負荷に応じたストイキ燃焼方式またはリーン燃焼方式に切り替える。
【0145】
本実施形態ではエンジン8の燃焼方式が複数あるのでハイブリッド制御部74は、燃焼効率最適線LEFとして図9ではなく、上記ストイキ燃焼方式とリーン燃焼方式とのそれぞれの燃焼方式に応じた図20のようなエンジン8の燃焼効率最適線LEF(最適燃費率曲線LEF、燃費マップ)を予め記憶している。そして、ハイブリッド制御部74は、エンジン8の燃焼方式に応じた燃焼効率最適線LEFを選択した上で第1実施形態の場合と同様にその選択された燃焼効率最適線LEFに沿ってエンジン8が作動させられるように電気式差動部11の変速比γ0を制御する。
【0146】
エンジン燃焼方式判定部114は、エンジン8の燃焼方式がストイキ燃焼方式とリーン燃焼方式との何れに切り替えられているかを判定する。
【0147】
無段変速制御部80は、第1実施形態の場合と同様に無段変速部20の変速を行う変速制御部として機能し、エンジン走行中において電気式差動部11が差動状態(無段変速状態)である場合には上記無段変速部変速比マップから車速Vに基づいて無段変速部20の変速比γCVTを決定(設定)する。但し、上記無段変速部変速比マップは、第1実施形態と同様にその無段変速部変速比マップに従って車速Vから上記変速比γCVTが決定され燃焼効率最適線LEF上のエンジン動作点PEGでエンジン8が作動させられた場合に理想的には第1電動機回転数NMG1が零乃至は略零(メカニカルロック点)になるように予め実験等により求められ設定された車速Vと変速比γCVTとの関係で設定するところ、本実施形態のエンジン8はストイキ燃焼方式とリーン燃焼方式とを備えており、燃焼効率最適線LEFはストイキ燃焼方式とリーン燃焼方式とのそれぞれの燃焼方式に応じて合計2本あるので、無段変速制御部80が予め記憶しており上記無段変速部20の変速比γCVTの決定に用いる上記無段変速部変速比マップである図21は、それぞれの上記燃焼方式に応じた合計2本の変速比曲線から構成されている点が図11(第1実施形態)と異なる。この図21に示す無段変速部変速比マップにより無段変速部20の変速比γCVTが決定された場合、各回転要素RE1〜RE3の相対回転数を示す共線図では図22のように、何れの燃焼方式でも車速Vで拘束される第4回転要素RE4(出力軸22)の回転数は変わらず理想的には第1電動機回転数NMG1はメカニカルロック点からずれないように運転され、エンジン回転数NEはそれぞれの燃焼方式の燃焼効率最適線LEFに沿ったエンジン動作点PEGに対応した異なった回転数になる。
【0148】
このように無段変速制御部80はエンジン8の燃焼方式に応じて上記2本の変速比曲線から何れかを選択する必要があるので、無段変速制御部80は、エンジン燃焼方式判定部114によりエンジン8がストイキ燃焼方式に切り替えられていると判定された場合には図21の無段変速部変速比マップからストイキ燃焼方式の変速比曲線を選択し、エンジン燃焼方式判定部114によりエンジン8がリーン燃焼方式に切り替えられていると判定された場合には図21の無段変速部変速比マップからリーン燃焼方式の変速比曲線を選択する。そして、無段変速制御部80は車速V及びその選択された変速比曲線に基づいて無段変速部20の変速比γCVTを決定(設定)する。言い換えると、上記選択された変速比曲線は現在の燃焼方式に応じた燃焼効率最適線LEF上のエンジン動作点PEGでエンジン8が作動させられた場合の車速Vと変速比γCVTとの関係であるので、無段変速制御部80は現在の燃焼方式に応じた燃焼効率最適線LEFに基づいて無段変速部20の変速比γCVTを決定(設定)する。
【0149】
図23は、本実施形態の電子制御装置60の制御作動の要部すなわちエンジン走行中において電気式差動部11が差動状態(無段変速状態)である場合にエンジン8の燃焼方式に応じて無段変速部20の変速比γCVTを決定する制御作動を説明するフローチャートであり、例えば数msec〜数十msec程度の極めて短いサイクルタイムで繰り返し実行される。
【0150】
先ず、エンジン燃焼方式判定部114に対応するSD1においては、エンジン8の燃焼方式がリーン燃焼方式に切り替えられているかが判定される。この判定が肯定的である場合、すなわち、エンジン8の燃焼方式がリーン燃焼方式に切り替えられている場合にはSD2に移る。一方、この判定が否定的である場合、すなわち、エンジン8の燃焼方式がストイキ燃焼方式に切り替えられている場合にはSD3に移る。
【0151】
SD2においては、図21の無段変速部変速比マップからリーン燃焼方式の変速比曲線が選択される。SD2の次はSD4に移る。
【0152】
SD3においては、図21の無段変速部変速比マップからストイキ燃焼方式の変速比曲線が選択される。SD3の次はSD4に移る。
【0153】
SD4においては、上記SD2もしくはSD3にて選択された変速比曲線が上記無段変速部20の基本変速比を決定するための変速比曲線としてメモリにストアされる。そして、その選択された変速比曲線及び車速Vに基づいて無段変速部20の変速比γCVTが決定される。なお、上記SD2〜SD4は無段変速制御部80に対応する。
【0154】
そして、本実施形態においても、上述した第1実施形態の場合と同様に、電気式差動部11の差動を制限して無段変速部20で総合変速比γTを変更する場合と、電気式差動部11を差動させ、この電気式差動部11と無段変速部20とで総合変速比γTを変更する場合とのうち燃費の良い方を使用した運転を実現できるようにしている。このため、これまでにない大幅な燃費の改善が可能な車両用駆動装置の制御を実現できる。
【0155】
本実施形態によれば、第1実施形態の効果(A1)〜(A10)に加え次のような効果(B1)がある。
【0156】
(B1)無段変速制御部80はエンジン8の燃焼方式に応じて選択された変速比曲線(図21参照)と車速Vとに基づいて無段変速部20の変速比γCVTを決定する。すなわち、現在の燃焼方式に応じた燃焼効率最適線LEF(図20参照)に基づいて無段変速部20の変速比γCVTを決定するので、エンジン8の燃焼方式が変更されてもその燃焼方式に応じて無段変速部20の変速比γCVTが決定(設定)され、それぞれの燃焼方式に応じた最適燃費を実現するようにエンジン8が運転され電気式差動部11の伝達効率η11が向上して車両全体として燃費低下を抑制することが可能である。
【0157】
(第3実施形態)
次に、第3実施形態について説明する。本実施形態は、機械式無段変速部の構成が上記第1実施形態のものと異なっている。具体的には、機械式無段変速部としてベルト式無段変速機(ベルト式CVT)を適用したものであって、FF(フロントエンジン・フロントドライブ)型車両に適用したものである。その他、駆動装置10の構成や制御は上記第1実施形態や第2実施形態のものと同様であるので、ここでは、このベルト式無段変速機で構成される無段変速部の構成についてのみ説明する。
【0158】
図24は、本実施形態の駆動装置10を示すスケルトン図である。伝達部材18の後段側に連結されているベルト式無段変速部120は、その変速比γCVT(=伝達部材18の回転数N18/出力軸22の回転数NOUT)を機械的作用により連続的に変化させることができる無段の自動変速機として機能するものである。
【0159】
そして、第1軸心RC1上に設けられ且つ伝達部材18に連結された入力側プーリであるプライマリプーリ121と、第2軸心RC2上にプライマリプーリ121と並列に設けられ且つ出力軸22に連結された出力側プーリであるセカンダリプーリ122と、これら一対のプーリ121,122の間に巻き付けられ、その一対のプーリ121,122間を摩擦力により動力伝達可能に連結するベルト123とを備えている。尚、図24における符号32は、ベルト式無段変速部120の出力側に出力軸22を介して連結されたデフドライブギヤであり、符号34は、デフドライブギヤ32に噛み合うデフリングギヤである。このデフリングギヤ34は上記ディファレンシャル装置2に連結されている。
【0160】
上記プライマリプーリ121は、回転軸方向にスライド可能な円錐状の可動シーブ121aとスライド不能に固定された円錐状の固定シーブ121bとから構成されており、可動シーブ121aと固定シーブ121bが頂点を向けて相対向して組み合わされて、ベルト123が接触するV字状のプライマリプーリ溝124が形成されている。またセカンダリプーリ122もプライマリプーリ121と同様の構成である。つまり、セカンダリプーリ122は可動シーブ122aと固定シーブ122bとから構成されており、両者の間にベルト123が接触するV字状のセカンダリプーリ溝125が形成されている。
【0161】
このベルト式無段変速部120では、プライマリプーリ121およびセカンダリプーリ122のそれぞれとベルト123との間で動力伝達のための摩擦力を得るためにベルト123に張力が与えられており、プライマリプーリ溝124とセカンダリプーリ溝125との何れでも各シーブ121a,121b,122a,122bの円錐面でベルト123と接触している。そのため、プライマリプーリ121の可動シーブ121aを固定シーブ121bに近付け、それと同期してセカンダリプーリ122の可動シーブ122aを固定シーブ122bから離すほど、プライマリプーリ121のベルト123との接触径(有効径)は大きくなりセカンダリプーリ122のベルト123との接触径(有効径)は小さくなってベルト式無段変速部120の変速比γCVTは小さくなる。すなわち、油圧制御などによってプライマリプーリ121とセカンダリプーリ122とが互いに同期してスライドされることによりベルト式無段変速部120の変速比γCVTは連続的に変化する。
【0162】
このベルト式無段変速部120を作動させるためのより具体的な構成として、上記プライマリプーリ121の可動シーブ121aおよびセカンダリプーリ122の可動シーブ122aには、油圧アクチュエータ126,127がそれぞれ備えられている。つまり、これら油圧アクチュエータ126,127内に形成された作動油圧室に所定油圧を作用させることで各可動シーブ121a,122aを固定シーブ121b,122bに対して進退移動させる構成となっている。
【0163】
また、プライマリプーリ121の油圧アクチュエータ126およびセカンダリプーリ122の油圧アクチュエータ127には、油圧制御回路を介して油圧がそれぞれ制御されて供給されるようになっている。つまり、プライマリプーリ121に備えられた油圧アクチュエータ126にはプライマリ制御油圧Ppriが供給され、セカンダリプーリ122に備えられた油圧アクチュエータ127にはセカンダリ制御油圧Psecが供給されるようになっている。
【0164】
より詳しくは、図示しないオイルパンから吸引されオイルポンプから吐出された作動油が、デューティ制御される調圧バルブにより調圧され、ライン圧PLとして制御される。このライン圧PLを有する作動油は、デューティ制御されるプライマリ側減圧バルブにより上記プライマリ制御油圧Ppriとされ、入力側(プライマリ側)の油圧アクチュエータ126に供給される。更に、ライン圧PLを有する作動油は、同じくデューティ制御され、セカンダリ側減圧バルブにより制御されて上記セカンダリ制御油圧Psecとされ、出力側(セカンダリ側)の油圧アクチュエータ127に供給される。
【0165】
上記無段変速制御部80には、上記伝達部材(プライマリシャフト)18の回転数N18および出力軸(セカンダリシャフト)22の回転数NOUT等、更には車速Vやアクセル開度Acc等の情報が入力され、予め実験等により求められているマップ等に基づいて、所要の変速比γCVT(=N18/NOUT)やベルト挟圧力を得るべく、上述のプライマリ制御油圧Ppriおよびセカンダリ制御油圧Psecが形成される。
【0166】
そして、プライマリ側の油圧アクチュエータ126の作動油圧室に作用するプライマリ制御油圧Ppriを制御することにより、プライマリプーリ溝124の幅が調整される。その結果、プライマリプーリ121におけるベルト123の巻き掛け半径が変化し、ベルト式無段変速部120の入力回転数N18と出力回転数NOUTとの比、すなわち変速比γCVTが無段階(連続的)に制御されることになる。
【0167】
更に、セカンダリ側の油圧アクチュエータ127の作動油圧室に作用するセカンダリ制御油圧Psecを制御することにより、セカンダリプーリ溝125の幅が変化する。つまり、ベルト123に対するセカンダリプーリ122の軸線方向のベルト挟圧(言い換えれば推力)が制御される。このベルト挟圧によりベルト123の張力が制御され、プライマリプーリ121およびセカンダリプーリ122とベルト123との接触面圧が制御される。このセカンダリ制御油圧Psecは、無段変速部120のプライマリプーリ121に接続される伝達部材18に入力されるトルクおよび変速比などに基づいて制御される。
【0168】
このように構成されたベルト式無段変速機で成る無段変速部120を備えた駆動装置1においても、上述した第1実施形態や第2実施形態の場合と同様に、電気式差動部11の差動を制限して無段変速部120で総合変速比γTを変更する場合と、電気式差動部11を差動させ、この電気式差動部11と無段変速部120とで総合変速比γTを変更する場合とのうち燃費の良い方を使用した運転を実現できるようにしている。このため、これまでにない大幅な燃費の改善が可能な車両用駆動装置の制御を実現できる。
【0169】
本実施形態によれば、第1実施形態に対し無段変速部120の機械的構造が異なるだけであるので、第1実施形態の効果(A1)〜(A10)と同様の効果がある。
【0170】
(他の実施形態)
以上、本発明の実施形態を図面に基づいて詳細に説明したが、これはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【0171】
例えば、前述の第2実施形態では、エンジン8の燃焼方式が変更される場合について説明されているが、エンジン8の運転方式であるエンジン8の燃焼方式が変更される場合のみならずその他の運転方式が変更される場合にも同様の制御作動で対応し得る。例えば、軽負荷時にはエンジン8が4気筒で駆動され高負荷時には8気筒で駆動されるような可変気筒の運転方式を備えたエンジン8にも上記制御作動で同様に対応し得る。
【0172】
また前述の第2実施形態において、エンジン8の燃焼方式はリーン燃焼方式とストイキ燃焼方式との2方式であるが3方式以上であっても差し支えない。
【0173】
また前述の第1実施形態〜第3実施形態において、第1電動機MG1の運転状態が制御されることにより、電気式差動部11(動力分配機構16)はその変速比γ0が最小値γ0minから最大値γ0maxまで連続的に変化させられる電気的な無段変速機として機能するものであったが、例えば電気式差動部11の変速比γ0を連続的ではなく差動作用を利用して敢えて段階的に変化させるものであってもよい。また、無段変速部20,120もその変速比γCVTを敢えて段階的に変化させるものであってもよい。
【0174】
また前述の第1実施形態〜第3実施形態において、エンジン8と電気式差動部11とは直結されているが、エンジン8が電気式差動部11にクラッチ等の係合要素を介して連結されていてもよい。
【0175】
また前述の第1実施形態〜第3実施形態において、第1電動機MG1と第2回転要素RE2とは直結されており、第2電動機MG2と第3回転要素RE3とは直結されているが、第1電動機MG1が第2回転要素RE2にクラッチ等の係合要素を介して連結され、第2電動機MG2が第3回転要素RE3にクラッチ等の係合要素を介して連結されていてもよい。
【0176】
また前述の第1実施形態〜第3実施形態において、エンジン8から駆動輪3への動力伝達経路において、電気式差動部11の次に無段変速部20が連結されているが、無段変速部20の次に電気式差動部11が連結されている順番でもよい。要するに、無段変速部20は、エンジン8から駆動輪3への動力伝達経路の一部を構成するように設けられておればよい。また、本発明は、電気式差動部11を備えていないシステムに対しても適用が可能である。
【0177】
また前述の第1実施形態〜第3実施形態において、図1によれば、電気式差動部11と無段変速部20とは直列に連結されているが、駆動装置10全体として電気的に差動状態を変更し得る電気式差動機能とその電気式差動機能による変速とは異なる原理で変速する機能とが備わっていれば、電気式差動部11と無段変速部20とが機械的に独立していなくても本発明は適用される。
【0178】
また前述の第1実施形態〜第3実施形態において、動力分配機構16はシングルプラネタリであるが、ダブルプラネタリであってもよい。
【0179】
また前述の第1実施形態〜第3実施形態において、差動部遊星歯車装置17を構成する第1回転要素RE1にはエンジン8が動力伝達可能に連結され、第2回転要素RE2には第1電動機MG1が動力伝達可能に連結され、第3回転要素RE3には駆動輪3への動力伝達経路が連結されているが、例えば、2つの遊星歯車装置がそれを構成する一部の回転要素で相互に連結された構成において、その遊星歯車装置の回転要素にそれぞれエンジン、電動機、駆動輪が動力伝達可能に連結されており、その遊星歯車装置の回転要素に連結されたクラッチ又はブレーキの制御により電気式差動部11が有段変速と無段変速とに切替可能な構成にも本発明は適用される。
【0180】
また前述の第1実施形態〜第3実施形態において、第2電動機MG2は伝達部材18に直接連結されているが、第2電動機MG2の連結位置はそれに限定されず、エンジン8又は伝達部材18から駆動輪3までの間の動力伝達経路に直接的或いは変速機、遊星歯車装置、係合装置等を介して間接的に連結されていてもよい。
【0181】
また、前述の第1実施形態〜第3実施形態の動力分配機構16では、差動部キャリヤCA0がエンジン8に連結され、差動部サンギヤS0が第1電動機MG1に連結され、差動部リングギヤR0が伝達部材18に連結されていたが、それらの連結関係は、必ずしもそれに限定されるものではなく、エンジン8、第1電動機MG1、伝達部材18は、差動部遊星歯車装置17の3要素CA0、S0、R0のうちのいずれと連結されていても差し支えない。
【0182】
また前述の第1実施形態〜第3実施形態において、エンジン8は入力軸14と直結されていたが、例えばギヤ、ベルト等を介して作動的に連結されておればよく、共通の軸心上に配置される必要もない。
【0183】
また前述の第1実施形態〜第3実施形態において、第1電動機MG1および第2電動機MG2は、入力軸14に同心に配置されて第1電動機MG1は差動部サンギヤS0に連結され第2電動機MG2は伝達部材18に連結されていたが、必ずしもそのように配置される必要はなく、例えばギヤ、ベルト、減速機等を介して作動的に第1電動機MG1は差動部サンギヤS0に連結され、第2電動機MG2は伝達部材18に連結されていてもよい。
【0184】
また前述の第1実施形態〜第3実施形態において、動力分配機構16は1組の差動部遊星歯車装置17から構成されていたが、2以上の遊星歯車装置から構成されて、非差動状態(定変速状態)では3段以上の変速機として機能するものであってもよい。
【0185】
また前述の第1実施形態〜第3実施形態において、第2電動機MG2はエンジン8から駆動輪3までの動力伝達経路の一部を構成する伝達部材18に連結されているが、第2電動機MG2がその動力伝達経路に連結されていることに加え、クラッチ等の係合要素を介して動力分配機構16にも連結可能とされており、第1電動機MG1の代わりに第2電動機MG2によって動力分配機構16の差動状態を制御可能とする駆動装置10の構成であってもよい。
【0186】
また前述した複数の実施形態はそれぞれ、例えば優先順位を設けるなどして、相互に組み合わせて実施することができる。
【0187】
その他、一々例示はしないが、本発明はその趣旨を逸脱しない範囲内において種々の変更が加えられて実施されるものである。
【図面の簡単な説明】
【0188】
【図1】第1実施形態に係るハイブリッド車両用駆動装置の構成を説明するスケルトン図である。
【図2】トロイダル式無段変速部の構成を模式的に示す図であって、ディスクの回転軸心に対して直交する方向から見た断面図である。
【図3】トロイダル式無段変速部の構成を模式的に示す図であって、ディスクの回転軸心に沿う方向から見た断面図である。
【図4】トロイダル式無段変速部の変速制御を概念的に示したブロック図である。
【図5】ハイブリッド車両用駆動装置において各回転要素の回転数の相対関係を直線上で表す共線図である。
【図6】ハイブリッド車両用駆動装置に設けられた電子制御装置の入出力信号を説明する図である。
【図7】ハイブリッド車両用駆動装置を操作するためのシフトレバーを備えたシフト操作装置の一例を示す図である。
【図8】第1実施形態に係るハイブリッド車両用駆動装置において、電子制御装置による制御機能の要部を説明する機能ブロック線図である。
【図9】第1実施形態に係るハイブリッド車両用駆動装置におけるエンジンの燃焼効率最適線を表す図である。
【図10】第1実施形態に係るハイブリッド車両用駆動装置において、車速とアクセル開度とをパラメータとする同じ二次元座標に構成された、差動部の差動状態の切替判断の基となる予め記憶された差動状態切替線図の一例と、エンジン走行とモータ走行とを切り替えるためのエンジン走行領域とモータ走行領域との境界線を有する予め記憶された駆動力源切替線図の一例とを示す図である。
【図11】図8の無段変速制御部が無段変速部の基本変速比としてその変速比を決定するために用いる車速と無段変速部の変速比との関係を示す無段変速部変速比マップを示す図である。
【図12】図8の差動制御部が第1電動機回転数NMG1を零に近付ける方向に補正するために用いる第1電動機回転数変更値ΔNMG1と電気パス量との予め設定された関係を示す図である。
【図13】第1実施形態において、図6の電子制御装置の制御作動の要部すなわちエンジン走行中において差動部が差動状態である場合に差動部の伝達効率を向上させるための制御を説明するフローチャート図である。
【図14】図13のSA4を置換するステップを示す図である。
【図15】無段変速制御部が無段変速部の変速比を補正するために用いる無段変速部の変速比と伝達効率との関係を示す図である。
【図16】図6の電子制御装置の制御作動の要部すなわちエンジン走行中において差動部が差動状態である場合に乗算効率を向上させるための制御作動を説明するフローチャート図である。
【図17】図16のSB4を置換するステップを示す図である。
【図18】車両走行状態に応じて運転状態を選択するための動作の手順を示すフローチャート図である。
【図19】第2実施形態において、図6の電子制御装置による制御機能の要部を説明する機能ブロック線図である。
【図20】第2実施形態において、エンジンの燃焼効率最適線を表す図であって、第1実施形態の図9に相当する図である。
【図21】第2実施形態において、図19の無段変速制御部が無段変速部の基本変速比としてその変速比を決定するために用いる車速と無段変速部の変速比との関係を示す無段変速部変速比マップであって、第1実施形態の図11に相当する図である。
【図22】第2実施形態において、エンジンの燃焼方式が切り替えられた場合の各回転要素の回転数の相対関係を例示した共線図である。
【図23】第2実施形態において、図6の電子制御装置の制御作動の要部すなわちエンジン走行中において差動部が差動状態である場合にエンジンの燃焼方式に応じて無段変速部の変速比を決定する制御作動を説明するフローチャート図である。
【図24】図1のハイブリッド車両用駆動装置の無段変速部をそれとは異なる構造の無段変速部に置換した第3実施形態のスケルトン図である。
【符号の説明】
【0189】
8 エンジン(内燃機関)
10 駆動装置(車両用駆動装置)
11 差動部(電気式差動部)
16 動力分配機構(差動機構)
20 無段変速部
120 無段変速部
MG1 第1電動機
MG2 第2電動機
S0 差動部サンギヤ
P0 差動部遊星歯車
CA0 差動部キャリヤ
R0 差動部リングギヤ
【技術分野】
【0001】
本発明は、車両用駆動装置の制御装置に係る。特に、本発明は、車両用駆動装置における動力伝達効率の向上を図るための対策に関する。
【背景技術】
【0002】
近年、環境保護等の観点から、車両に搭載されたエンジン(内燃機関)からの排気ガスの排出量低減および燃料消費率(燃費)の改善が望まれており、これらを満足する車両として、ハイブリッドシステムを搭載したハイブリッド車両が実用化されている。
【0003】
このハイブリッド車両は、ガソリンエンジンなどの駆動源と、エンジンの出力により発電またはバッテリの電力により駆動する電動機(例えばモータジェネレータまたはモータ)とを備え、エンジンおよび電動機のいずれか一方または双方を走行駆動源としている。
【0004】
この種のハイブリッド車両に搭載されたハイブリッドシステムの駆動装置として、例えば下記の特許文献1〜3に開示されているものが知られている。これら特許文献に開示されている駆動装置は、差動部の回転要素に連結された第1電動機、差動部の入力軸に入力されたエンジンの出力を上記第1電動機および出力軸(伝達軸)に分配する動力分配機構、および、上記出力軸に連結された第2電動機などによって構成される電気式差動部と、この電気式差動部から駆動装置の出力軸との間における動力伝達経路の一部を構成する変速部(例えば有段式の変速機)とを備えた構成となっている。このような車両用駆動装置では、第1電動機および第2電動機の運転状態を制御することにより、電気式差動部が無段変速機構(電気式無段変速部)として作動する。また、上記動力分配機構は、その差動により、エンジンからの動力の主部を駆動輪に向けて機械的に伝達し、そのエンジンからの動力の一部を第1電動機から第2電動機への電気パスを用いて電気的に伝達するようになっている。
【0005】
また、特許文献3には、上記電気式差動部をロックする(非差動とする)ことによる電気パスの低減とエンジン動作点の変更による燃費の損得とを比較し、燃費の良い方で車両用駆動装置を運転させることが開示されている。
【特許文献1】特開2006−273305号公報
【特許文献2】特開2005−264762号公報
【特許文献3】特開2005−240917号公報
【発明の開示】
【発明が解決しようとする課題】
【0006】
上述したように前段側に電気式差動部が備えられ、後段側に変速部が備えられた車両用駆動装置の実用性を高めることに鑑み、本発明の発明者らは、電気式差動部の差動および変速部の変速を制御する手法について考察を行った。
【0007】
そして、上記特許文献1〜3に開示されているように後段側の変速部として有段変速機が適用されているものでは、この後段側の変速機の変速比が段階的にしか変化できないため、如何なる車速においても最適な燃費を得るといった制御の実現は不可能であることを見出した。このような事項は未公知のものである。
【0008】
そこで、本発明の発明者らは、上記変速部として、ベルト式やトロイダル式等の無段変速機を適用することに着目した(トロイダル式無段変速機を適用することについては未公開)。
【0009】
このように上記変速部として無段変速機を適用する場合、変速比の調整が可能な範囲ではエンジンを燃費最適動作点で駆動できるため、上述した特許文献3に係る燃費改善のための技術的思想は適用できず、燃費の良い車両用駆動装置の運転状態を選択するための新たな技術的思想を提案する必要がある。
【0010】
以上のような課題は、未公知の事項であって、本発明の発明者らが新たに見出したものである。
【0011】
本発明は、かかる点に鑑みてなされたものであり、その目的とするところは、電気式差動部と無段変速部とを備えた車両用駆動装置に対し、その車両用駆動装置全体の変速比の総合的な制御を実現することにより動力伝達効率の向上を図ることが可能な車両用駆動装置の制御装置を提供することにある。
【課題を解決するための手段】
【0012】
上記の目的を達成するために講じられた本発明の解決手段は、電気式差動部と無段変速部とを備えた車両用駆動装置の制御装置であって、上記電気式差動部の差動を制限して上記無段変速部で総合無段変速比を変更する場合と、上記電気式差動部を差動させ、この電気式差動部と上記無段変速部とで総合無段変速比を変更する場合とのそれぞれの燃費を車両の走行条件に応じて比較し、燃費の良い方を使用するようにしている。
【0013】
また好適には、上記電気式差動部の差動を制限した電気パス量の変化と、上記無段変速部の変速比が変化することによるその伝達効率の変化とを比較対象とする。
【0014】
また好適には、上記電気式差動部の入力側にはエンジンが配設されており、このエンジンの動作点が相違する場合、その変化を考慮して、上記電気式差動部の差動を制限して上記無段変速部で総合無段変速比を変更する場合と、上記電気式差動部を差動させ、この電気式差動部と上記無段変速部とで総合無段変速比を変更する場合とのうちの燃費の良い方を使用する。
【0015】
また好適には、上記車両の走行条件を車速とする。
【0016】
また好適には、電気式差動部の差動を制限した状態は、ローおよびハイの2つの状態を有する。
【0017】
また好適には、上記電気式差動部の差動の強制領域ではない場合に、上記電気式差動部の差動を制限して上記無段変速部で総合無段変速比を変更する場合と、上記電気式差動部を差動させ、この電気式差動部と上記無段変速部とで総合無段変速比を変更する場合とのうちの燃費の良い方を使用する。
【0018】
また好適には、上記電気式差動部は、差動ギヤと2つの電動機とを備えて構成されている。
【0019】
本発明では、上記電気式差動部の差動を制限して上記無段変速部で総合無段変速比を変更する場合と、上記電気式差動部を差動させ、この電気式差動部と上記無段変速部とで総合無段変速比を変更する場合とのうち燃費の良い方を使用した運転を実現できる。このため、これまでにない大幅な燃費の改善が可能な車両用駆動装置の制御を実現できる。
【0020】
また、上記車両の走行条件を車速とした場合には、電気パスを低減することによる伝達効率の向上が図れる。
【0021】
また、電気式差動部の差動を制限した状態としてローおよびハイの2つの状態を備えさせた場合には、動力性能と燃費性能との両立が可能となり、また、駆動装置の総合変速比の幅を大きく確保することができる。逆に言えば、無段変速部の変速比幅を比較的小さく設定することが可能になる。
【0022】
また、電気式差動部の差動の強制領域ではない場合に、上述した燃費の良い方を使用する制御を行うものでは、上記強制領域である場合には、その強制された状態(強制差動状態または強制非差動状態)を優先する。
【発明を実施するための最良の形態】
【0023】
以下、本発明の実施の形態を図面に基づいて説明する。
【0024】
(第1実施形態)
本実施形態は、2つのモータ・ジェネレータを備え、且つFR(フロントエンジン・リヤドライブ)型車両として構成されたハイブリッド車両に搭載される車両駆動装置に本発明を適用した場合について説明する。
【0025】
<ハイブリッドシステムの全体構成>
図1は、本実施形態に係るハイブリッド車両に搭載されたハイブリッドシステムを構成する車両用駆動装置10(以下、「駆動装置10」という)を示すスケルトン図である。
【0026】
図1において、駆動装置10は、トランスミッションケース12(以下、「ケース12」という)内において共通の軸心上に配設された入力回転部材としての入力軸14と、この入力軸14に、直接または図示しない脈動吸収ダンパ(振動減衰装置)を介して連結された電気式差動部11と、この電気式差動部11の出力回転部材である伝達部材18とを備えている。また、この駆動装置10は、上記伝達部材18に連結されて、上記電気式差動部11と駆動輪3(図8参照)との間の動力伝達経路の一部を構成する機械式無段変速部20(以下、「無段変速部20」という)と、この無段変速部20の出力側に連結された出力軸22とを備えている。更に、この駆動装置10は、上記入力軸14に直接または図示しない脈動吸収ダンパを介して連結された走行用の駆動力源(動力源)としてのエンジン8を備えている。このエンジン8は、例えばガソリンエンジンやディーゼルエンジン等の内燃機関により構成されている。これにより、車両用駆動装置10は、エンジン8からの動力を、上記電気式差動部11、無段変速部20およびディファレンシャル装置2(終減速機:図8参照)を経て駆動輪3へ伝達するようになっている。
【0027】
−電気式差動部11−
上記電気式差動部11は、第1電動機MG1と、上記入力軸14に入力されたエンジン8の出力を機械的に分配する機械的機構であってエンジン8の出力を第1電動機MG1および伝達部材18に分配する動力分配機構(差動機構)16と、伝達部材18と一体的に回転するように設けられた第2電動機MG2とを備えている。なお、本実施形態における第1電動機MG1および第2電動機MG2は、モータ(電動機)機能のみならず発電機能をも有する所謂モータジェネレータであるが、差動用電動機である第1電動機MG1は反力を発生させるためのジェネレータ(発電)機能を少なくとも備え、走行用電動機である第2電動機MG2は走行用の駆動力源として駆動力を出力するためのモータ(電動機)機能を少なくとも備えている。
【0028】
上記動力分配機構16は、例えば「0.436」程度の所定のギヤ比ρ0を有するシングルピニオン型の差動部遊星歯車装置17と、切替クラッチC0と、切替ブレーキB0とを備えている。上記差動部遊星歯車装置17は、差動部サンギヤS0、差動部遊星歯車P0、その差動部遊星歯車P0を自転および公転可能に支持する差動部キャリヤCA0、差動部遊星歯車P0を介して差動部サンギヤS0と噛み合う差動部リングギヤR0を回転要素(要素)として備えている。差動部サンギヤS0の歯数をZS0、差動部リングギヤR0の歯数をZR0とした場合、上記ギヤ比ρ0はZS0/ZR0である。
【0029】
この動力分配機構16においては、差動部キャリヤCA0が入力軸14すなわちエンジン8に連結され、差動部サンギヤS0が第1電動機MG1に連結され、差動部リングギヤR0が伝達部材18に連結されている。
【0030】
また、切替ブレーキB0は差動部サンギヤS0とケース12との間に設けられ、切替クラッチC0は差動部サンギヤS0と差動部キャリヤCA0との間に設けられている。これら切替クラッチC0および切替ブレーキB0が共に解放されると、動力分配機構16は差動部遊星歯車装置17の3要素である差動部サンギヤS0、差動部キャリヤCA0、差動部リングギヤR0がそれぞれ相互に相対回転可能となり、差動作用が可能な、すなわち差動作用が働く差動状態となる。これにより、エンジン8の出力が第1電動機MG1と伝達部材18とに分配されるとともに、分配されたエンジン8の出力の一部で第1電動機MG1から発生させられた電気エネルギが蓄電されたり、この電気エネルギにより第2電動機MG2が回転駆動される。このため、電気式差動部11(動力分配機構16)は、電気的な差動装置として機能し、所謂無段変速状態(電気的CVT状態)となり、エンジン8の回転数に関わらず伝達部材18の回転を連続的に(無段階に)変化させることができる。すなわち、動力分配機構16が差動状態になると、電気式差動部11も差動状態となり、この電気式差動部11は、その変速比γ0(入力軸14の回転数NlN/伝達部材18の回転数N18)が最小値γ0minから最大値γ0maxまで連続的に変化可能となる電気的な無段変速機として機能する無段変速状態となる。このように動力分配機構16が差動状態になると、動力分配機構16(電気式差動部11)に動力伝達可能に連結された第1電動機MG1、第2電動機MG2、およびエンジン8の各運転状態が制御されることにより、動力分配機構16の差動状態、すなわち入力軸14の回転数と伝達部材18の回転数との差動状態が制御される。
【0031】
この状態で、上記切替クラッチC0または切替ブレーキB0を係合させると、動力分配機構16は上記差動作用をしない、すなわち差動作用が不能な非差動状態となる。具体的には、上記切替クラッチC0を係合させて差動部サンギヤS0と差動部キャリヤCA0とが一体的に係合すると、動力分配機構16は、差動部遊星歯車装置17の3要素である差動部サンギヤS0、差動部キャリヤCA0、差動部リングギヤR0が共に回転、すなわち一体回転するロック状態となって上記差動作用が不能な非差動状態となる。これにより、電気式差動部11も非差動状態となる。また、エンジン8の回転数と伝達部材18の回転数とが一致する状態となるので、電気式差動部11(動力分配機構16)は変速比γ0が「1」に固定された変速機として機能する定変速状態すなわち有段変速状態となる。
【0032】
一方、上記切替クラッチC0に代えて切替ブレーキB0を係合させて差動部サンギヤS0がケース12に連結すると、動力分配機構16は、差動部サンギヤS0が非回転状態となるロック状態となって上記差動作用が不能な非差動状態となることから、電気式差動部11も非差動状態となる。また、差動部リングギヤR0は差動部キャリヤCA0よりも増速回転するので、動力分配機構16は増速機構として機能し、電気式差動部11(動力分配機構16)は変速比γ0が「1」より小さい値、例えば「0.696」に固定された増速変速機として機能する定変速状態すなわち有段変速状態となる。
【0033】
このように、本実施形態では、上記切替クラッチC0および切替ブレーキB0が、電気式差動部11(動力分配機構16)の変速状態を差動状態すなわち非ロック状態と、非差動状態すなわちロック状態とに選択的に切替える。つまり、電気式差動部11(動力分配機構16)を電気的な差動装置として作動可能な差動状態(例えば変速比が連続的に変化可能な無段変速機として作動する電気的な無段変速作動が可能な無段変速状態)と、電気的な無段変速作動を行わない変速状態(例えば無段変速機として作動せず無段変速作動を非作動として変速比を一定にロックするロック状態すなわち1または2種類以上の変速比の単段または複数段の変速機として作動する定変速状態(非差動状態))とに選択的に切替える差動状態切替装置として機能している。
【0034】
電気式差動部11は、切替クラッチC0および切替ブレーキB0が解放され且つ第1電動機MG1が反力を発生しない自由回転状態にされた場合には、電気式差動部11内の動力伝達経路における動力伝達を遮断する動力伝達遮断状態となる。一方、第1電動機MG1が反力を発生し、または、切替クラッチC0もしくは切替ブレーキB0の一方が係合された場合には、電気式差動部11内の動力伝達経路における動力伝達を可能とする動力伝達可能状態となる。そして、電気式差動部11が動力伝達遮断状態または動力伝達可能状態とされることにより、駆動装置10全体が動力伝達遮断状態または動力伝達可能状態となる。但し、本実施形態では第2電動機MG2と駆動輪3との間の動力伝達経路は遮断されることがないので、駆動装置10全体が動力伝達遮断状態とされるためには第2電動機MG2は自由回転状態にされる。
【0035】
上記切替クラッチC0および切替ブレーキB0は、従来の車両用有段式自動変速機においてよく用いられている油圧式摩擦係合装置であって、互いに重ねられた複数枚の摩擦板が油圧アクチュエータにより押圧される湿式多板型や、回転するドラムの外周面に巻き付けられた1本または2本のバンドの一端が油圧アクチュエータによって引き締められるバンドブレーキなどにより構成され、それが介装されている両側の部材を選択的に連結するようになっている。
【0036】
−無段変速部20−
無段変速部20は、その変速比γCVT(=伝達部材18の回転数N18/出力軸22の回転数NOUT)を機械的作用により連続的に変化させることができる無段の自動変速機として機能する所謂トロイダル式CVT変速装置(以下、「トロイダル式無段変速部20」と呼ぶ場合もある)により構成されている。本実施形態ではダブルキャビティ式のハーフトロイダル型の無段変速部20を適用した場合について説明するが、フルトロイダル型の無段変速部を適用することも可能である。
【0037】
上記伝達部材18の後段側に連結されている上記トロイダル式無段変速部20は、伝達部材18の回転軸上で相対向する2つの入力ディスク23a,23b(以下、特に区別しない場合には「入力ディスク23」という)と、これら2つ入力ディスク23a,23bの間において入力ディスク23a,23bのそれぞれに相対向して同軸上に設けられ且つ出力ギヤ27およびカウンタシャフト25を介して出力軸22に連結された2つの出力ディスク24a,24b(以下、特に区別しない場合には「出力ディスク24」という)とを備えている。また、この無段変速部20は、相対向するそれぞれの入力ディスク23a,23bと出力ディスク24a,24bとの間に、その回転軸を対称軸として2つずつ合計4つのパワーローラ26a,26b,26c,26d(以下、特に区別しない場合には「パワーローラ26」という)を備えている。
【0038】
そして、相対向する入力ディスク23と出力ディスク24とは互いが近付く方向に押圧され、それらの対向面はその間に設けられた2つのパワーローラ26の外周面と摩擦力を発生して接触し、その接触を維持しつつパワーローラ26の回転軸が揺動可能となるように、入力ディスク23および出力ディスク24の相対向するパワーローラ26との接触面は略円弧状断面を有している。
【0039】
このように構成されたトロイダル式無段変速部20では、第1の動力伝達経路をなす一組の入力ディスク23a、パワーローラ26a,26b、出力ディスク24aと、第2の動力伝達経路をなす一組の入力ディスク23b、パワーローラ26c,26d、出力ディスク24bとが、機械的配置としては伝達部材18の回転軸上で直列に設けられ、動力伝達経路としては並列に設けられている。そして、伝達部材18から入力された駆動トルクは、トロイダル式無段変速部20内の並列な2つの動力伝達経路でそれぞれ入力ディスク23、パワーローラ26、出力ディスク24の順に伝達され、この出力ディスク24に上記カウンタシャフト25を介して連結された出力軸22を経て駆動輪3へ伝達されるようになっている。
【0040】
このトロイダル式無段変速部20では、入力ディスク23と出力ディスク24とのそれぞれに対して外周面で摩擦接触する4つのパワーローラ26a〜26dの回転(傾転)角度を同時に変化させることによって、入力ディスク23におけるパワーローラ26との接触点の半径(有効径)と出力ディスク24におけるパワーローラ26との接触点の半径(有効径)との比が変化し、トロイダル式無段変速部20の変速比γCVTが連続的に変化する。以下、この変速比γCVTを変更するための機構について具体的に説明する。
【0041】
図2および図3は、トロイダル式無段変速部20を模式的に示す図である。上述したように、トロイダル式無段変速部20は、トロイダル面を対向させた上記入力ディスク23と出力ディスク24とが、二対、同一軸線上に配置され、出力ディスク24a,24bの間に出力ギヤ27が配置されている。この出力ギヤ27は上記カウンタシャフト25に動力を伝達するものである。
【0042】
各ディスク23,24および出力ギヤ27の中心部を上記伝達部材18が貫通しており、各入力ディスク23a,23bは、この伝達部材18に一体となって回転し、且つ軸線方向に移動できるように取り付けられている。これに対し、出力ディスク24a,24bおよび出力ギヤ27は、伝達部材18に対して相対回転自在に嵌合されており、且つ各出力ディスク24a,24bと出力ギヤ27とは一体となって回転するように連結されている。
【0043】
伝達部材18の一方の端部(図2の左側の端部)には、入力ディスク23aを抜け止めするためのロック部材としてのロックナット40が取り付けられている。これとは反対側の端部(図2での右側の端部)には、油圧シリンダ41が取り付けられている。この油圧シリンダ41は、各対の入力ディスク23と出力ディスク24とを互いに接近させる方向に押圧する挟圧力を生じさせるための挟圧力発生機構であって、シリンダ42が伝達部材18に固定されているとともに、そのシリンダ42の内部に軸線方向に移動可能に収容したピストン43が、入力ディスク23bの背面に当接している。したがって、これらシリンダ42とピストン43との間に油圧を供給することにより、ピストン43が一方の入力ディスク23bをこれとは反対側に配置されている入力ディスク23a側に向けて押圧するように構成されている。なお、この挟圧力発生機構は、油圧シリンダ41に代えて、トルクを軸線方向の推力に変化させるカム機構やネジ機構などの他の機構によって構成してもよい。
【0044】
各対の入力ディスク23と出力ディスク24との間にそれぞれ挟み込まれているパワーローラ26は、入力ディスク23と出力ディスク24との間でのトルクの伝達を媒介するいわゆる伝動部材であって、ほぼ円盤状をなし、入力ディスク23と出力ディスク24との間に、各ディスク23,24の円周方向に等間隔に配置されている。各パワーローラ26は、各ディスク23,24の回転に伴って自転し、また各ディスク23,24の間で傾く(傾転する)ように、それぞれトラニオン45によって保持されている。
【0045】
各トラニオン45は、パワーローラ26を自転かつ傾転自在に保持するためのものであって、中心側を向く面を平坦面とした保持部46の上下両側にトラニオン軸47,47が延びて形成されている。図3における上側のトラニオン軸47が軸受を介してアッパヨーク48に嵌合させられ、また、図3における下側のトラニオン軸47が軸受を介してロアヨーク49に嵌合させられている。したがって各トラニオン45は、それぞれトラニオン軸47,47を中心にして回転できるように各ヨーク48,49によって互いに連結されている。したがってトラニオン軸47の中心軸線が傾転軸となっている。
【0046】
各パワーローラ26は各トラニオン45における上記保持部46に取り付けたピボットシャフト50によって回転自在に保持され、また各パワーローラ26とそれぞれのトラニオン45との間にはスラスト軸受51が介装されている。
【0047】
各トラニオン45における図3での下側のトラニオン軸47は、直線的な前後動作を行うアクチュエータに連結されている。そのアクチュエータは、流体圧シリンダや、トルクを推力に変化させて出力する電動シリンダなどによって構成されており、本実施形態では油圧シリンダ52が採用されている。具体的には、上記トラニオン軸47は、各パワーローラ26に対応して設けた油圧シリンダ52のピストン52aに連結されている。これらの油圧シリンダ52は、一方のパワーローラ26を図3において上側に移動させると同時に他方のパワーローラ26を図3において下側に移動させるように構成されている。例えば、図3において左側の油圧シリンダ52におけるピストン52aより、上側の油圧室が変速比の小さい高速側に変速させるためのハイ油室52Hであり、これとは反対の下側の油圧室が変速比の大きい低速側に変速させるためのロー油室52Lとなっている。また、図3における右側の油圧シリンダ52におけるピストン52aより、上側の油圧室が変速比の大きい低速側に変速させるためのロー油室52Lであり、これとは反対の下側の油圧室が変速比の小さい高速側に変速させるためのハイ油室52Hとなっている。そして、ハイ油室52H,52H同士、およびロー油室52L,52L同士が互いに連通されている。
【0048】
上記のパワーローラ26を中立位置からアップシフト側あるいはダウンシフト側に変位(オフセット)させて変速を実行するための機構について説明すると、その機構は上記油圧シリンダ52などのアクチュエータを動作させるように構成された機構であり、図に示すものでは、デューティ制御される電磁弁53によって構成されている。なお、この種の制御弁としては、上述したハイ油室52H,52Hに対する油圧の給排を制御する弁とロー油室52L,52Lに対する油圧の給排を制御する弁との二本を設けてもよく、あるいは一本の制御弁で各油室52H,52H,52L,52Lに対する油圧の給排を同時に制御するように構成してもよい。
【0049】
図に示す電磁弁53は、上記ハイ油室52H,52Hに連通するハイ側ポート53aと、上記ロー油室52L,52Lに連通するロー側ポート53bと、ライン圧が入力される入力ポート53cと、二つのドレーンポート53d,53eと、ソレノイド54およびその反対側に配置されたスプリング55によって軸線方向に移動させられて各ポートの連通状態を切り替えるスプール56とを有している。そして、そのスプール56は、入力ポート53cおよび各ドレーンポート53d,53eをハイ側ポート53aおよびロー側ポート53bのいずれに対しても閉じた状態、入力ポート53cをハイ側ポート53aに連通させると同時にロー側ポート53bをドレーンポート53eに連通させたアップシフト状態、これとは反対に、入力ポート53cをロー側ポート53bに連通させると同時にハイ側ポート53aをドレーンポート53dに連通させたダウンシフト状態とに切り替えるように構成されている。
【0050】
上記電磁弁53を使用した変速制御は電気的に実行されるよう構成されている。すなわち、各パワーローラ26の位置をトラニオン45の位置もしくは変位量として検出するためにストロークセンサ61が設けられている。このストロークセンサ61は一例として、一方のトラニオン45のトラニオン軸47に取り付けられており、その軸線方向の変位量を電気的に検出し、検出信号として出力するように構成されている。ここで変位量とは、パワーローラ26に対してサイドスリップ力もしくは傾転力が作用しない中立位置からの上記傾転軸方向の移動量である。
【0051】
また、いずれかのトラニオン軸47に傾転角センサ62が設けられている。図に示すものでは、上記ストロークセンサ61が取り付けられているトラニオン軸47と同一軸線上にある他のトラニオン軸47に傾転角センサ62が取り付けられている。この傾転角センサ62は、トラニオン軸47の回転角度を電気的に検出して信号を出力するものであって、例えば入力ディスク23と出力ディスク24との回転数が等しい状態すなわち変速比が「1」の状態におけるトラニオン軸47の角度を「0」とし、この状態からのトラニオン軸47の回転角度を傾転角として検出し、その傾転角に応じた電気的な信号を出力するようになっている。
【0052】
さらに、いずれかの入力ディスク23の回転数を検出して電気的な信号を出力する入力回転数センサ63と、いずれかの出力ディスク24の回転数を検出して電気的な信号を出力する出力回転数センサ64とが設けられている。したがって、これらの回転数センサ63,64で検出された各回転数に基づいて、実際の変速比γCVTを求めることができる。
【0053】
これら各センサ61,62,63,64は、変速比や上述した挟圧力を制御するための電子制御装置(ECU)60(図6参照)に電気的に接続されている。この電子制御装置60は、マイクロコンピュータを主体として構成されたものであって、入力された信号および予め記憶しているデータならびにプログラムに従って各種の演算を行い、その演算結果に基づいて制御指令信号を出力するように構成されている。
【0054】
上記のトロイダル式無段変速部20によるトルクの伝達および変速について説明すると、伝達部材18から入力ディスク23a,23bにトルクが入力されると、その入力ディスク23a,23bにトラクションオイルを介して接触しているパワーローラ26a〜26dにトルクが伝達され、さらにそのパワーローラ26a〜26dから出力ディスク24a,24bにトラクションオイルを介してトルクが伝達される。その場合、トラクションオイルは加圧されることによりガラス転移し、それに伴う大きい剪断力によってトルクを伝達するので、各ディスク23,24は入力トルクに応じた圧力がパワーローラ26との間に生じるように押圧される。
【0055】
また、パワーローラ26の周速と各ディスク23,24のトルク伝達点(パワーローラ26がトラクションオイルを介して接触している点)の周速とは実質的に同じであるから、パワーローラ26が傾転して入力ディスク23との間のトルク伝達点の回転中心軸線からの半径と、出力ディスク24との間のトルク伝達点の回転中心からの半径とに応じて各ディスク23,24の回転数(回転速度)が異なり、その回転数の比率が変速比となる。
【0056】
このようにして変速比を設定するパワーローラ26の傾転は、パワーローラ26を図3の上下方向に移動させることにより生じる。例えば、上記電磁弁53を制御して油圧シリンダ52,52のハイ油室52H,52Hにライン圧を供給すると、図3の左側のパワーローラ26aが下側に移動し、且つ図3の右側のパワーローラ26bが上側に移動する。その結果、各パワーローラ26a,26bにはこれを傾転させる力(サイドスリップ力)がディスク23a,24aとの間に生じ、各パワーローラ26a,26bが傾転する。パワーローラ26a,26bの変位量は、実際の傾転角と目標とする傾転角との偏差に基づいて制御され、したがってパワーローラ26a,26bが次第に傾転して目標傾転角に一致すると、パワーローラ26a,26bは中立位置に復帰させられ、その傾転が止まる。その結果、目標とする変速比が設定される。
【0057】
上記の電子制御装置(ECU)60は、スロットル開度などで代表される要求駆動量や車速などに基づいて目標とする変速比に対応する傾転角度を求め、その傾転角度を達成するように電磁弁53に指令信号を出力する。その目標傾転角度は、パワーローラ26をトラニオン45と共にストロークさせることにより達成できるので、パワーローラ26のストローク量を上記ストロークセンサ61によって検出し、その検出したストローク量とストローク指令量との偏差を制御偏差として電磁弁53に対する指令信号(例えばデューティ比)がフィードバック制御される。
【0058】
上記の基本的な変速制御を図4にブロック図によって概念的に示してある。図4において、先ず、目標変速比に相当する目標傾転角度φoと実際の傾転角度φとの偏差が求められる。その目標変速比およびこれに対応する傾転角度の算出は、従来、トロイダル型無段変速機での変速制御で実行されているものと同様にして行うことができる。例えば、アクセル開度などで表される要求駆動量と車速とに基づいて要求駆動力が算出され、その要求駆動力と車速とから目標出力が求められ、その目標出力を最小の燃費で達成するエンジン8の回転数が求められ、その回転数でエンジン8が駆動するように目標変速比および目標傾転角度φ0が求められる。
【0059】
上記偏差に所定のゲインK1による処理を施してパワーローラ26のストローク量(一例として中立点からのストローク量)X0が求められる。そのストローク量X0と実際のストローク量Xとの偏差に所定のゲインK2による処理が施されて、上記電磁弁53について指令信号(例えばデューティ比)が求められ、その電磁弁53の出力する油圧によってパワーローラ26が変位し、かつそれに伴ってパワーローラ26が傾転することにより、無段変速部20が変速する。
【0060】
−変速−
以上のように構成された駆動装置10では、上述した如く動力分配機構16に切替クラッチC0および切替ブレーキB0が備えられており、切替クラッチC0および切替ブレーキB0の何れかが係合作動させられることによって、電気式差動部11は上述した無段変速機として作動する無段変速状態に加え、変速比γ0が一定の変速機として作動する定変速状態を構成することが可能とされている。したがって、駆動装置10では、切替クラッチC0および切替ブレーキB0の何れかを係合作動させることで定変速状態とされた電気式差動部11と無段変速部20とで機械的な無段変速機として作動する無段変速状態が構成され、切替クラッチC0および切替ブレーキB0の何れも係合作動させないことで無段変速状態とされた電気式差動部11と無段変速部20とで電気的かつ機械的な無段変速機として作動する無段変速状態が構成される。なお、駆動装置10内の動力伝達経路が遮断されたニュートラル「N」状態とする場合には、例えば切替クラッチC0および切替ブレーキB0が解放され第1電動機MG1および第2電動機MG2が共に自由回転状態とされる。
【0061】
駆動装置10において切替クラッチC0および切替ブレーキB0が共に解放された場合には、それにより電気式差動部11が電気的な無段変速機として機能し、それに直列の無段変速部20が機械的な無段変速機として機能して、電気式差動部11の変速比γ0と無段変速部20の変速比γCVTとの積である駆動装置10全体としてのトータル変速比(総合変速比)γT(=入力軸14の回転数NIN/出力軸22の回転数NOUT)が無段階に得られる。
【0062】
図5は、第1変速部として機能する電気式差動部11と第2変速部(無段変速部)として機能する無段変速部20とから構成される駆動装置10において、電気式差動部11の各回転要素の回転数(回転速度)の相対関係を直線上で表すことができる共線図(ある特定の動力伝達状態における共線図)を示している。この図5の共線図は、各回転要素を示す横軸と相対的回転数(回転速度)を示す縦軸とから成る二次元座標であり、2本の横線のうちの下側の横線X1が回転数零を示し、上側の横線X2が回転数「1.0」すなわち入力軸14に連結されたエンジン8の回転数NEを示している。
【0063】
また、電気式差動部11の各回転要素に対応する3本の縦線Y1,Y2,Y3は、左側から順に第2回転要素(第2要素)RE2に対応する差動部サンギヤS0、第1回転要素(第1要素)RE1に対応する差動部キャリヤCA0、第3回転要素(第3要素)RE3に対応する差動部リングギヤR0をそれぞれ表している。共線図の縦軸間の関係において遊星歯車装置17では差動部サンギヤS0と差動部キャリヤCA0との間が「1」に対応する間隔とされると、差動部キャリヤCA0と差動部リングギヤR0との間が遊星歯車装置17のギヤ比ρに対応する間隔とされる。すなわち、電気式差動部11では縦線Y1とY2との縦線間が「1」に対応する間隔に設定され、縦線Y2とY3との間隔は上記ギヤ比ρ0に対応する間隔に設定される。
【0064】
上記図5の共線図を用いて表現すれば、本実施形態の駆動装置10は、動力分配機構16(電気式差動部11)において、差動部遊星歯車装置17の第1回転要素RE1(差動部キャリヤCA0)が入力軸14すなわちエンジン8に連結されるとともに切替クラッチC0を介して第2回転要素(差動部サンギヤS0)RE2と選択的に連結され、この第2回転要素RE2が第1電動機MG1に連結されるとともに切替ブレーキB0を介してケース12に選択的に連結され、第3回転要素(差動部リングギヤR0)RE3が伝達部材18および第2電動機MG2に連結されて、入力軸14の回転を、伝達部材18を介して無段変速部20へ伝達する(入力させる)ように構成されている。このとき、Y2とX2の交点を通る直線L0により差動部サンギヤS0の回転数と差動部リングギヤR0の回転数との関係が示される。
【0065】
例えば、上記切替クラッチC0および切替ブレーキB0の解放により電気式差動部11が無段変速状態(差動状態)に切替えられたときは、第1電動機MG1の回転数を制御することによって直線L0と縦線Y1との交点で示される差動部サンギヤS0の回転が上昇または下降させられ、差動部リングギヤR0の回転数が略一定である場合には、直線L0と縦線Y2との交点で示される差動部キャリヤCA0の回転数が上昇または下降させられる。また、切替クラッチC0の係合により差動部サンギヤS0と差動部キャリヤCA0とが連結されると、動力分配機構16は差動部サンギヤS0と差動部キャリヤCA0と差動部リングギヤR0とが一体回転する非差動状態とされるので、直線L0は横線X2と一致し、エンジン回転数NEと同じ回転で伝達部材18が回転する。或いは、切替ブレーキB0の係合によって差動部サンギヤS0の回転が停止させられると、動力分配機構16は増速機構として機能する非差動状態とされるので、直線L0は図5に示す状態となり、その直線L0と縦線Y3との交点で示される差動部リングギヤR0すなわち伝達部材18の回転数は、エンジン回転数NEよりも増速された回転で無段変速部20へ入力される。
【0066】
また、無段変速部20においては、その変速比γCVTが連続的に変化し、出力軸22に向けて動力が伝達される。
【0067】
−電子制御装置60−
図6は、駆動装置10を制御するための制御装置である電子制御装置60に入力される信号及びその電子制御装置60から出力される信号を示している。この電子制御装置60は、CPU、ROM、RAM、および入出力インターフェースなどから成る所謂マイクロコンピュータを含んで構成されており、RAMの一時記憶機能を利用しつつROMに予め記憶されたプログラムに従って信号処埋を行うことによりエンジン8、第1電動機MG1、第2電動機MG2に関するハイブリッド駆動制御、無段変速部20の変速制御等の駆動制御を実行するものである。
【0068】
電子制御装置60には、上述したストロークセンサ、傾転角センサ、入力回転数センサ、出力回転数センサからの信号の他、エンジン水温TEMPWを示す信号、シフトポジションPSHを表す信号、第1電動機MG1の回転数NMG1(以下、「第1電動機回転数NMG1」という)を表す信号、第2電動機MG2の回転数NMG2(以下、「第2電動機回転数NMG2」という)を表す信号、エンジン8の回転数であるエンジン回転数NEを表す信号、変速比設定値を示す信号、Mモード(手動変速走行モード)を指令する信号、エアコンの作動を示すエアコン信号、出力軸22の回転数NOUT(以下、「出力軸回転数NOUT」という)に対応する車速Vを表す信号、CVT油温センサにより検出される無段変速部20の作動油温TEMPCVTを示す油温信号、サイドブレーキ操作を示す信号、フットブレーキ操作を示す信号、触媒温度を示す触媒温度信号、運転者の出力要求量に対応するアクセル開度Acc(アクセルペダルの操作量Acc)を示すアクセル開度信号、カム角信号、スノーモード設定を示すスノーモード設定信号、車両の前後加速度を示す加速度信号、オートクルーズ走行を示すオートクルーズ信号、車両の重量を示す車重信号、各車輪の車輪速を示す車輪速信号、エンジン8の空燃比A/Fを示す信号、スロットルバルブの開度を示す信号などが、それぞれ供給される。
【0069】
また、上記電子制御装置60からは、エンジン出力を制御するエンジン出力制御装置71(図8参照)への制御信号、例えばエンジン8の吸気管95に備えられた電子スロットル弁96の開度θTHを操作するスロットルアクチュエータ97への駆動信号や燃料噴射装置98によるエンジン8の各気筒内への燃料供給量を制御する燃料供給量信号や点火装置99によるエンジン8の点火時期を指令する点火信号、過給圧を調整するための過給圧調整信号、電動エアコンを作動させるための電動エアコン駆動信号、電動機MG1およびMG2の作動を指令する指令信号、シフトインジケータを作動させるためのシフトポジション(操作位置)表示信号、変速比を表示させるための変速比表示信号、スノーモードであることを表示させるためのスノーモード表示信号、制動時の車輪のスリップを防止するABSアクチュエータを作動させるためのABS作動信号、Mモードが選択されていることを表示させるMモード表示信号、電気式差動部11および無段変速部20の油圧アクチュエータを制御するために油圧制御回路72(図8参照)に含まれる電磁ソレノイド弁を作動させるバルブ指令信号、その電磁ソレノイド弁に供給されるライン圧を調整するためのライン圧コントロールソレノイド弁を作動させるバルブ指令信号、油圧制御回路72の油圧源である電動油圧ポンプを作動させるための駆動指令信号、電動ヒータを駆動するための信号、クルーズコントロール制御用コンピュータへの信号等が、それぞれ出力される。
【0070】
−シフト操作装置66−
図7は複数種類のシフトポジションPSHを人為的操作により切り替える切替装置としてのシフト操作装置66の一例を示す図である。このシフト操作装置66は、例えば運転席近傍に配設され、複数種類のシフトポジションPSHを選択するために操作されるシフトレバー68を備えている。
【0071】
そのシフトレバー68は、駆動装置10内の動力伝達経路が遮断されたニュートラル状態すなわち中立状態とし且つ出力軸22をロックするための駐車ポジション「P(パーキング)」、後進走行のための後進走行ポジション「R(リバース)」、駆動装置10内の動力伝達経路が遮断された中立状態とするための中立ポジション「N(ニュートラル)」、駆動装置10の変速可能なトータル変速比γTの変化範囲内で自動変速制御を実行させる前進走行ポジション「D(ドライブ)」、またはマニュアル走行モード(手動モード)を成立させて上記自動変速制御における高速側の変速段を制限する所謂変速レンジを設定するための前進マニュアル走行ポジション「M(マニュアル)」へ手動操作されるように設けられている。
【0072】
そして、上記シフトレバー68の手動操作により選択されたシフトポジションPSHに応じて例えば油圧制御回路72が電気的に切り替えられて、駆動装置10内の動力伝達経路が上記選択されたシフトポジションPSHに応じたものに変更される。例えば、シフトポジションPSHとして「P」ポジションまたは「N」ポジションが選択された場合には、切替クラッチC0と切替ブレーキB0とが共に解放され、第1電動機MG1と第2電動機MG2とが自由回転状態にされ、駆動装置10内の動力伝達経路が動力伝達遮断状態にされる。
【0073】
<制御部>
図8は、上記電子制御装置60による制御機能の要部を説明する機能ブロック線図である。図8において、ハイブリッド制御部74は、電気式差動部11の差動状態において、エンジン8を効率の高い作動域で作動させる一方で、エンジン8と第2電動機MG2との駆動力の配分や第1電動機MG1の発電による反力が最適になるように変化させて電気式差動部11の電気的な無段変速機としての変速比γ0を制御する。例えば、そのときの走行車速において、運転者の出力要求量としてのアクセル開度(アクセルペダル操作量)Accや車速Vから車両の目標(要求)出力を算出し、車両の目標出力と充電要求値とから必要なトータル目標出力を算出し、そのトータル目標出力が得られるように、伝達損失、補機負荷、第2電動機MG2のアシストトルク等を考慮して目標エンジン出力を算出する。そして、その目標エンジン出力が得られるエンジン回転数NEとエンジントルクTEとなるようにエンジン8を制御するとともに第1電動機MG1の発電量を制御する。
【0074】
ハイブリッド制御部74は、その制御を動力性能や燃費向上などのために無段変速部20の変速比γCVTを考慮して実行する。このようなハイブリッド制御では、エンジン8を効率のよい作動域で作動させるために定まるエンジン回転数NEと車速Vおよび無段変速部20の変速比γCVTで定まる伝達部材18の回転数N18とを整合させるために、電気式差動部11が電気的な無段変速機として機能させられる。すなわち、後述する電気式差動部11の差動領域にある場合、ハイブリッド制御部74は例えば図9の燃費マップに示すようなエンジン回転数NEとエンジン8の出力トルク(エンジントルク)TEとをパラメータとする二次元座標内において無段変速走行の時に運転性と燃費性とを両立するようにすなわちエンジン8の燃費向上のために予め実験的に定められたエンジン8の動作曲線である燃焼効率最適線LEF(最適燃費率曲線LEF、燃費マップ)を予め記憶しており、その燃焼効率最適線LEFに沿ってエンジン8が作動させられるように、例えば目標出力(トータル目標出力、要求駆動力)を充足するために必要なエンジン出力を発生するためのエンジントルクTEとエンジン回転数NEとなるように駆動装置10のトータル変速比γTの目標値を定め、その目標値が得られるように電気式差動部11の変速比γ0を制御する。
【0075】
このとき、ハイブリッド制御部74は、第1電動機MG1により発電された電気エネルギを、インバータ92を通して蓄電装置94や第2電動機MG2へ供給するので、エンジン8の動力の主要部は機械的に伝達部材18へ伝達されるが、エンジン8の動力の一部は第1電動機MG1の発電のために消費されてそこで電気エネルギに変換され、インバータ92を通してその電気エネルギが第2電動機MG2へ供給され、その第2電動機MG2が駆動されて第2電動機MG2から伝達部材18へ伝達される。この電気エネルギの発生から第2電動機MG2で消費されるまでに関連する機器により、エンジン8の動力の一部を電気エネルギに変換し、その電気エネルギを機械的エネルギに変換するまでの電気パスが構成される。
【0076】
ハイブリッド制御部74は、スロットル制御のためにスロットルアクチュエータ97により電子スロットル弁96を開閉制御させる他、燃料噴射制御のために燃料噴射装置98による燃料噴射量や噴射時期を制御させ、点火時期制御のためにイグナイタ等の点火装置99による点火時期を制御させる指令を単独で或いは組み合わせてエンジン出力制御装置71に出力して必要なエンジン出力を発生するようにエンジン8の出力制御を実行するエンジン出力制御部を機能的に備えている。例えば、ハイブリッド制御部74は、基本的には図示しない予め記憶された関係からアクセル開度信号Accに基づいてスロットルアクチュエータ97を駆動し、アクセル開度Accが増加するほどスロットル弁開度θTHを増加させるようにスロットル制御を実行する。
【0077】
図10の実線Aは、車両の発進/走行用(以下、走行用という)の駆動力源をエンジン8と電動機例えば第2電動機MG2とで切り替えるための、言い換えればエンジン8を走行用の駆動力源として車両を発進/走行(以下、走行という)させる所謂エンジン走行と、第2電動機MG2を走行用の駆動力源として車両を走行させる所謂モータ走行とを切り替えるための、エンジン走行領域とモータ走行領域との境界線である。この図10に示すエンジン走行とモータ走行とを切り替えるための境界線(実線A)を有する予め記憶された関係は、車速Vとアクセル開度Accとをパラメータとする二次元座標で構成された駆動力源切替線図(駆動力源マップ)の一例である。この駆動力源切替線図は例えばハイブリッド制御部74に予め記憶されている。
【0078】
そして、ハイブリッド制御部74は、例えば図10の駆動力源切替線図から車速Vとアクセル開度Accとで示される車両状態に基づいてモータ走行領域とエンジン走行領域との何れであるかを判断してモータ走行またはエンジン走行を実行する。このように、ハイブリッド制御部74によるモータ走行は、図10から明らかなように一般的にエンジン効率が高トルク域に比較して悪いとされる比較的低アクセル開度Acc時すなわち低エンジントルクTE時、または車速Vの比較的低車速時すなわち低負荷域で実行される。
【0079】
このモータ走行時には、停止しているエンジン8の引き摺りを抑制して燃費を向上させるために、電気式差動部11の差動作用によりエンジン回転数NEを零乃至略零にする。
【0080】
ハイブリッド制御部74はエンジン走行とモータ走行とを選択的に切り替える。そのためにハイブリッド制御部74は、エンジン8の始動および停止を行うエンジン始動停止制御部76を備えている。このエンジン始動停止制御部76は、ハイブリッド制御部74により例えば図10の駆動力源切替線図から車両状態に基づいてモータ走行とエンジン走行との切替えが判断された場合に、エンジン8の始動または停止を実行する。
【0081】
例えば、エンジン始動停止制御部76は、図10の実線Bの点a→点bに示すようにアクセルペダルが踏込操作されてアクセル開度Accが大きくなり車両状態がモータ走行領域からエンジン走行領域へ変化した場合には、第1電動機MG1に通電して第1電動機回転数NMG1を引き上げることで、すなわち第1電動機MG1をスタータとして機能させることで、例えば自立回転可能な回転数にまでエンジン回転数NEを引き上げ点火装置99により点火させ、エンジン8の始動を行って、モータ走行からエンジン走行へ切り替える。このとき、エンジン始動停止制御部76は、第1電動機回転数NMG1を速やかに引き上げることで、アイドル回転数NEIDL以下のエンジン回転数領域における共振領域を速やかに回避してエンジン始動を行い、その始動時の振動を抑制するようにしてもよい。
【0082】
また、エンジン始動停止制御部76は、図10の実線Bの点b→点aに示すように、アクセルペダルが戻されてアクセル開度Accが小さくなり車両状態がエンジン走行領域からモータ走行領域へ変化した場合には、燃料噴射装置98による燃料供給を停止させることにより、すなわちフューエルカットによりエンジン8の停止を行って、エンジン走行からモータ走行へ切り替える。このとき、エンジン始動停止制御部76は、第1電動機回転数NMG1を速やかに引き下げることでエンジン回転数NEを速やかに零乃至略零まで引き下げてもよい。これにより、上記共振領域を速やかに回避できて停止時の振動が抑制される。
【0083】
また、ハイブリッド制御部74は、エンジン走行領域であっても、蓄電装置94からの電気エネルギを第2電動機MG2へ供給し、その第2電動機MG2を駆動してエンジン8の動力を補助するトルクアシストが可能である。よって、本実施形態ではエンジン8と第2電動機MG2との両方を走行用の駆動力源とする車両の走行はモータ走行ではなくエンジン走行に含まれるものとする。
【0084】
また、ハイブリッド制御部74は、車両の停止状態または低車速状態に拘わらず、電気式差動部11の電気的CVT機能(差動作用)によってエンジン8の運転状態を維持させることができる。例えば、車両停止時に蓄電装置94の充電残量SOCが低下して第1電動機MG1による発電が必要となった場合には、エンジン8の動力により第1電動機MG1が発電状態でその第1電動機MG1の回転数が引き上げられ、第2電動機回転数NMG2が車両停止状態により零(略零)となっても動力分配機構16の差動作用によってエンジン回転数NEは自立回転可能な回転数以上に維持される。
【0085】
また、ハイブリッド制御部74は、車両の停止中または走行中に拘わらず、電気式差動部11の電気的CVT機能によって第1電動機回転数NMG1および/または第2電動機回転数NMG2を制御してエンジン回転数NEを任意の回転数に維持させられる。例えば、図5の共線図からもわかるようにハイブリッド制御部74はエンジン回転数NEを引き上げる場合には、第2電動機回転数NMG2を略一定に維持しつつ第1電動機回転数NMG1の引き上げを実行する。
【0086】
切替制御部78は、車両状態に基づいて上記差動状態切替装置(切替クラッチC0、切替ブレーキB0)の係合/解放を切り替えることにより、電気式差動部11の上記無段変速状態と有段変速状態とを、すなわち上記差動状態と上記ロック状態とを選択的に切り替える。例えば、切替制御部78は、上記図10と同じ座標系に表された破線、一点鎖線及び二点鎖線で示す差動状態切替線図(差動状態切替マップ)を予め記憶しており、その差動状態切替線図から車速Vおよびアクセル開度Accで示される車両状態に基づいて切替ブレーキB0または切替クラッチC0を係合(ロック)させるべきか否かを判断して、油圧制御回路72へ指令信号を出力することにより切替ブレーキB0または切替クラッチC0を係合させ、或いは切替ブレーキB0および切替クラッチC0を解放させる。例えば、アクセル開度Accが図10の判定アクセル開度Acc1を超えた高開度である場合には車両状態がC0ロック領域にあるので、切替制御部78は切替クラッチC0を係合させ電気式差動部11の変速比γ0を「1」に固定する(変速比がローに固定される)。また、アクセル開度Accが比較的低いため車両状態が上記C0ロック領域には入らず車速Vが図10の判定車速V1を超えた高車速である場合には車両状態がB0ロック領域にあるので、切替制御部78は切替ブレーキB0を係合させ電気式差動部11を変速比γ0が「0.696」で固定された増速変速機として機能させる(変速比がハイに固定される)。
【0087】
そして、切替制御部78は、切替ブレーキB0または切替クラッチC0を係合させた場合にはハイブリッド制御部74に対して電気式差動部11を電気的な無段変速機として機能させる差動制御を禁止し、一方、図10において低アクセル開度Acc、低車速Vの車両状態、すなわち車両状態が上記B0ロック領域にもC0ロック領域にも属さない電気式差動部11の無段制御領域である場合には切替ブレーキB0及び切替クラッチC0を解放させ、ハイブリッド制御部74に対して上記差動制御を許可する。
【0088】
尚、上述した如く、車速Vおよびアクセル開度Accで示される車両状態に基づいて切替ブレーキB0または切替クラッチC0を係合(ロック)させるべきか否かを判断する具体的な技術的思想については後述することとする。
【0089】
ここで上記図10について詳述すると、図10の太い破線は切替制御部78による電気式差動部11の無段制御領域とC0ロック領域との判定のための判定アクセル開度Acc1を示し、図10の太い一点鎖線は電気式差動部11の無段制御領域とB0ロック領域との判定のための判定車速V1を示しており、判定アクセル開度Acc1を超えた高アクセル開度Accであって判定車速V1を超えた高車速Vである場合にはC0ロック領域となっている。更に、図10の太い破線、太い一点鎖線、太い二点鎖線で示される判定アクセル開度Acc1と判定車速V1とには、それぞれ、細い破線、細い一点鎖線、細い二点鎖線で示されるようにヒステリシスが設けられている。なお、この図10の差動状態切替線図は判定アクセル開度Acc1および判定車速V1の少なくとも1つを含むものであってもよいし、アクセル開度Accおよび車速Vの何れかをパラメータとする予め記憶された切替線であってもよい。
【0090】
また、電気式差動部11を電気的な無段変速機として作動させるための電動機等の電気系の制御機器の故障や機能低下時、例えば第1電動機MG1における電気エネルギの発生からその電気エネルギが機械的エネルギに変換されるまでの電気パスに関連する機器の機能低下すなわち第1電動機MG1、第2電動機MG2、インバータ92、蓄電装置94、それらを接続する伝送路などの故障(フェイル)や、故障とか低温による機能低下が発生したような車両状態となる場合には、電気式差動部11の無段制御領域であっても車両走行を確保するために切替制御部78は優先的に切替ブレーキB0または切替クラッチC0を係合させてもよい。
【0091】
また、例えば判定車速V1は、高速走行において電気式差動部11が差動状態とされると返って燃費が低下するので、これを抑制するように、その高速走行において電気式差動部11が非差動状態となる。また、判定アクセル開度Acc1は、車両の高出力走行において第1電動機MG1の反力トルクをエンジン8の高出力域まで対応させない。
【0092】
このように、本実施形態の電気式差動部11(駆動装置10)は無段変速状態と有段変速状態(定変速状態)とに選択的に切替え可能であって、上記切替制御部78により車両状態に基づいて電気式差動部11の切り替えるべき変速状態が判断され、電気式差動部11が無段変速状態と有段変速状態とのいずれかに選択的に切り替えられる(この切り替えに関する技術的思想については後述する)。また、本実施形態では、ハイブリッド制御部74により車両状態に基づいてモータ走行或いはエンジン走行が実行されるが、このエンジン走行とモータ走行とを切り替えるために、エンジン始動停止制御部76によりエンジン8の始動または停止が行われる。
【0093】
無段変速制御部80は、油圧制御回路72へ指令信号を出力し、上記パワーローラ26を傾転させることにより無段変速部20の変速比γCVTを変化させて無段変速部20の変速を行う変速制御部として機能するものである。例えば、無段変速制御部80は、電気式差動部11の差動状態に応じて予め設定された車速Vおよびアクセル開度Accとの関係から変速比γCVTを決定し、その変速比γCVTが得られるように無段変速部20の変速制御を実行する。
【0094】
ここで、ハイブリッド制御部74による電気式差動部11の変速比γ0の制御によってエンジン走行中は燃費向上のため、エンジン回転数NE及びエンジントルクTEなどで示されるエンジン8の動作状態を示すエンジン動作点PEG(図9参照)が燃焼効率最適線LEFに沿うように(燃費最適点となるように)エンジン8が作動させられるが、更に、電気式差動部11におけるエンジン8からの出力(駆動エネルギ)の伝達効率η11を向上させて車両全体としての燃費向上が図られる。その制御機能の要部について以下に説明する。
【0095】
無段変速制御部80は、上述のように無段変速部20の変速制御を実行するが、エンジン走行中において電気式差動部11が差動状態(無段変速状態)である場合には図11に示される車速Vと無段変速部20の変速比γCVTとの関係を定める無段変速部変速比マップから車速Vに基づいて無段変速部20の変速比γCVTを決定(設定)する。この図11の無段変速部変速比マップは、その無段変速部変速比マップに従って車速Vから上記変速比γCVTが決定され燃焼効率最適線LEF上のエンジン動作点PEGでエンジン8が作動させられた場合に理想的には第1電動機回転数NMG1が零乃至は略零になるように、つまり図5の共線図で第1電動機回転数NMG1が回転停止を示すメカニカルロック点になるように予め実験等により求められ設定された車速Vと変速比γCVTとの関係で設定されている。従って、図11により無段変速部20の変速比γCVTを決定する無段変速制御部80は車速Vおよび燃焼効率最適線LEFに基づき、その燃焼効率最適線LEFにエンジン動作点PEGが沿うように無段変速部20の変速比γCVTを設定すると言える。そして、第1電動機回転数NMG1が零に近付くほど電気式差動部11の伝達効率η11は向上するので、図11に従って決定される無段変速部20の変速比γCVTである基本変速比は、上記電気式差動部11の伝達効率η11が充分に高くなるように、具体的に表現すればその伝達効率η11が予め定められた下限値以上になるように設定(決定)された変速比であると言える。
【0096】
また、無段変速制御部80は、上記切替ブレーキB0が係合され、第1電動機MG1がメカニカルロック点に維持されて、その回転が停止された場合にも、図11に示される車速Vと無段変速部20の変速比γCVTとの関係を定める無段変速部変速比マップから車速Vに基づいて無段変速部20の変速比γCVTを決定(設定)する。また、切替クラッチC0が係合されて、第1電動機MG1が入力軸14と一体的に回転する状態となった場合には、エンジン動作点PEGが上記燃焼効率最適線LEFに沿うよう、上記切替ブレーキB0が係合された場合に比べて変速比γCVTが小さく設定されるようになっている。
【0097】
上記ハイブリッド制御部74は電気式差動部11の伝達効率η11を高めるために差動制御部82を有している。エンジン走行中において電気式差動部11が差動状態(無段変速状態)である場合に、無段変速制御部80が図11の無段変速部変速比マップにより無段変速部20の変速比γCVTを決定すると差動制御部82は、電気式差動部11におけるエンジン8からの出力の伝達効率η11を高めるように第1電動機回転数NMG1を制御して電気式差動部11の変速比γ0を決定(設定)し変更する。電気式差動部11の伝達効率η11は第1電動機MG1と第2電動機MG2との間の電気パスに伝達される電気エネルギである電気パス量すなわち第1電動機MG1の電力が零に近付くほど向上するので、差動制御部82は、差動用電動機である第1電動機MG1の電力を零に近付けることによって上記電気式差動部11の伝達効率η11を高める。
【0098】
具体的に差動制御部82は、第1電動機MG1の電力を零に近付けることによって上記電気式差動部11の伝達効率η11を高めるため、上記電気式差動部11の伝達効率η11が充分に高いと見ることができる電気パス許容範囲内に第1電動機MG1の電力(電気パス量)が入っているか否かを判断する。その判断が肯定的である場合、すなわち、上記電気パス量が上記電気パス許容範囲内に入っている場合には、差動制御部82は現状の第1電動機回転数NMG1を維持する。一方、上記判断が否定的である場合には、差動制御部82は、図12に示されるような第1電動機回転数NMG1を零に近付ける方向に補正するための第1電動機回転数変更値ΔNMG1と上記電気パス量との予め設定された関係からその電気パス量すなわち第1電動機MG1の電力に基づき第1電動機回転数変更値ΔNMG1を決定し、第1電動機回転数NMG1を零に近付ける方向すなわち上記電気パス量を零に近付ける方向に第1電動機回転数NMG1を第1電動機回転数変更値ΔNMG1だけ補正する。第1電動機回転数変更値ΔNMG1と上記電気パス量との関係は、図12のように上記電気パス量が蓄電装置94の放電側に行くほど第1電動機回転数変更値ΔNMG1が大きくなる関係であってもよいし、図12と同様に第1電動機回転数変更値ΔNMG1の正負は原点を境に反転するが上記電気パス量に関わらず第1電動機回転数変更値ΔNMG1の絶対値が一定である関係であってもよい。差動制御部82は、上記第1電動機回転数NMG1についての補正をした場合には、再び上記電気パス許容範囲内に第1電動機MG1の消費電力(電気パス量)が入っているか否かを判断する。このように差動制御部82は、上記第1電動機MG1の電力(電気パス量)についての判断が肯定されるまでその判断と上記第1電動機回転数NMG1についての補正とを繰り返す。
【0099】
上述のように差動制御部82は、第1電動機MG1の電力を零に近付けることによって上記電気式差動部11の伝達効率η11を高めるが、第1電動機回転数NMG1が零に近付くほど上記第1電動機MG1の電力は零に近付くので、差動制御部82は第1電動機回転数NMG1を零に近付けることによって上記電気式差動部11の伝達効率η11を高めてもよい。そのような場合には、差動制御部82が行う判断における上記電気パス許容範囲は、第1電動機回転数NMG1についての許容範囲である第1電動機回転数許容範囲に置き替わり、差動制御部82はその第1電動機回転数許容範囲内に第1電動機回転数NMG1が入っているか否かを判断し、第1電動機回転数変更値ΔNMG1を決定するための図12では横軸が上記電気パス量から第1電動機回転数NMG1に置き替わる。
【0100】
このようにして無段変速制御部80が図11の無段変速部変速比マップにより無段変速部20の変速比γCVTを決定し、更に差動制御部82が上記電気パス量または第1電動機回転数NMG1を零に一層収束させることによって、上記電気式差動部11の伝達効率η11が高められることとなる。
【0101】
図13は、本実施形態の電子制御装置60の制御作動の要部すなわちエンジン走行中において電気式差動部11が差動状態(無段変速状態)である場合に電気式差動部11の伝達効率η11を向上させるための制御作動を説明するフローチャートであり、例えば数msec〜数十msec程度の極めて短いサイクルタイムで繰り返し実行される。
【0102】
先ず、ステップ(以下、「ステップ」を省略する)SA1においては、上記第1電動機回転数変更値ΔNMG1が初期化される。具体的には、第1電動機回転数変更値ΔNMG1が零に設定される。SA1の次はSA2へ移る。
【0103】
無段変速制御部80に対応するSA2においては、図11の無段変速部変速比マップから車速Vに基づいて無段変速部20の変速比γCVTが決定される。そして、その変速比γCVTが実現されるように、上述したパワーローラ26の傾転が行われる。SA2の次はSA3に移る。
【0104】
SA3においては、第1電動機回転数NMG1を零に近付ける方向すなわち上記電気パス量を零に近付ける方向に第1電動機回転数NMG1が第1電動機回転数変更値ΔNMG1だけ補正される。具体的には、目標とされる第1電動機回転数NMG1が現在の第1電動機回転数NMG1に第1電動機回転数変更値ΔNMG1を加算した回転数に設定変更され、その目標とされる第1電動機回転数NMG1になるように第1電動機MG1が制御される。SA3の次はSA4へ移る。
【0105】
SA4においては、第1電動機MG1の電力(電気パス量)が上記電気パス許容範囲内に入っているか否かが判断される。例えば、上記電気パス許容範囲はその範囲内に零を含みその上限値および下限値の絶対値が予め実験的に定められた闘値XEとされており、上記電気パス量の絶対値がその闘値XE以下か否かが判断される。ここで、上記電気パス量としては第1電動機MG1の電力が用いられているが、別の物理値、例えば第1電動機MG1の制御電流値が上記電気パス量として用いられてもよい。第1電動機MG1の制御電流値とは上記消費電力に対応する駆動電流値(消費電流値)または上記出力電力に対応する発電電流値をいう。この判断が肯定的である場合、すなわち、第1電動機MG1の電力(電気パス量)が上記電気パス許容範囲内に入っている場合には本フローチャートは終了する。一方、この判断が否定的である場合にはSA5に移る。
【0106】
上記SA4の判断対象は上記第1電動機MG1の電力(電気パス量)であるが、それに代えて第1電動機回転数NMG1について判断されてもよい。その場合にはSA4は図14のように置き替わりSA4において、例えば、上限値および下限値の絶対値が予め実験的に定められた閾値XNMG1とされた第1電動機回転数許容範囲内に第1電動機回転数NMG1が入っているか否か、言い換えれば、第1電動機回転数NMG1の絶対値が上記閾値XNMG1以下か否かが判断される。
【0107】
SA5においては、図12に示されるような第1電動機回転数変更値ΔNMG1と上記電気パス量との予め設定された関係からその電気パス量すなわち第1電動機MG1の電力に基づき第1電動機回転数変更値ΔNMG1が決定される。SA5の次はSA3に移る。なお、上記SA1、SA3、SA4及びSA5は、差動制御部82に対応する。
【0108】
また、無段変速制御部80の制御としては、エンジン走行中において電気式差動部11が差動状態(無段変速状態)である場合に、以下に述べるような変速制御を実行するようにしてもよい。つまり、無段変速部20の上記基本変速比として図11の無段変速部変速比マップにより無段変速部20の変速比γCVTを決定した後、電気式差動部11におけるエンジン8からの出力の伝達効率η11と無段変速部20における伝達効率ηCVTとの乗算値ηP(以下、「乗算効率ηP」という)を高めるように無段変速部20の変速比γCVTを決定(設定)し変更する。
【0109】
詳細に言うと、図15に示すような電気式差動部11の変速比γ0に応じて変化する上記変速比γCVTと乗算効率ηPとの関係である伝達効率乗算値マップが実験的に求められ無段変速制御部80に予め記憶されており、無段変速制御部80は、電気式差動部11の変速比γ0をエンジン回転数NEと第2電動機回転数NMG2とから検出し、図15の伝達効率乗算値マップとその検出された変速比γ0とに基づいて現在の無段変速部20の変速比γCVTに対応する乗算効率ηPを把握する。その上で無段変速制御部80は、図15の伝達効率乗算値マップ上でその乗算効率ηPがより高くなるように、図11の無段変速部変速比マップにより決定された無段変速部20の上記基本変速比に対して上記変速比γCVTの補正を行い、その変速比γCVTを決定(設定)し変更する。ここで、図11の無段変速部変速比マップに従って無段変速部20の変速比γCVTが上記基本変速比に設定されることで電気式差動部11においては理想的には第1電動機回転数NMG1が零乃至は略零になってその伝達効率η11は高められることとなるので、上記基本変速比に対する変速比γCVTの補正は上記乗算効率ηP(η11×ηCVT)がより高くなるようにすることではあるが専ら無段変速部20の伝達効率ηCVT(以下、「CVT効率ηCVT」という)がより高くなるようにすることである。
【0110】
具体的に無段変速制御部80は、図11の無段変速部変速比マップにより無段変速部20の変速比γCVTを決定した後、図15の伝達効率乗算値マップから現在の電気式差動部11の変速比γ0に対応する伝達効率曲線Lηを選択し、その選択された伝達効率曲線Lηにおいて現在の無段変速部20の変速比γCVTに対応する乗算効率ηPが点PMAX(図15参照)で示される最高効率から所定量低い伝達効率下限判定値以下であるか否かを判断する。この伝達効率下限判定値は乗算効率ηPが充分に高いと見ることができる乗算効率ηPの目標範囲の下限値である。その判断が否定的である場合、すなわち、上記乗算効率ηPが上記伝達効率下限判定値を超えている場合には、無段変速制御部80は、現状の無段変速部20の変速比γCVTを維持する。一方、上記判断が肯定的である場合、すなわち、乗算効率ηPが上記伝達効率下限判定値以下である場合には、無段変速制御部80は、最高効率を示す点PMAX(図15参照)に対応した目標となる変速比γCVTと現状の変速比γCVTとの差を求めその差を変速比γCVTの補正量である変速比変更値ΔγCVTとし、乗算効率ηPが高くなる方向すなわち上記点PMAXに近付く方向に無段変速部20の変速比γCVTを変速比変更値ΔγCVTだけ補正する。このとき、無段変速部20の変速比γCVTが大きく変動しないようにするために変速比変更値ΔγCVTの上限値である補正ガード値が予め設けられており、無段変速制御部80は変速比変更値ΔγCVT(絶対値)がその補正ガード値を超えない範囲内で無段変速部20の変速比γCVTを補正する。従って、無段変速制御部80は図15から求めた変速比変更値ΔγCVTの絶対値が上記補正ガード値を超えた場合にはその絶対値がその補正ガード値にまで小さくされるガード処理をした上で、上記無段変速部20の変速比γCVTの補正をする。図15に例示されるように、無段変速部20の変速比γCVTが変速比変更値ΔγCVTだけ一度補正されただけでは、その補正後の乗算効率ηPは上記伝達効率下限判定値を超えないことがある。無段変速制御部80は、上記無段変速部20の変速比γCVTの補正をした場合には、再び乗算効率ηPが上記伝達効率下限判定値以下であるか否かを判断する。このように無段変速制御部80は、乗算効率ηPについての判断と無段変速部20の変速比γCVTの補正とを繰り返す。
【0111】
無段変速制御部80が上記無段変速部20の変速比γCVTの補正をすることは、上述したように、専ら無段変速部20のCVT効率ηCVTがより高くなるようにすることでもあるので、無段変速制御部80はその判断対象を乗算効率ηPではなくCVT効率ηCVTとしてもよい。そのようにした場合には、図15の伝達効率乗算値マップはその縦軸を無段変速部20のCVT効率ηCVTとした無段変速部伝達効率マップに置き替わり、無段変速制御部80は、乗算効率ηPについてではなく、現在の無段変速部20の変速比γCVTに対応するCVT効率ηCVTが点PMAX(図15参照)で示される最高効率から所定量低いCVT効率下限判定値以下であるか否かを判断する。
【0112】
図16は、このような無段変速部20の変速比γCVTの補正を行う場合の制御作動の要部すなわちエンジン走行中において電気式差動部11が差動状態(無段変速状態)である場合に上記乗算効率ηPを向上させるための制御作動を説明するフローチャートであり、例えば数msec〜数十msec程度の極めて短いサイクルタイムで繰り返し実行される。
【0113】
先ず、SB1においては、無段変速部20の変速比γCVTが補正される場合の補正量である上記変速比変更値ΔγCVTが初期化される。具体的には、変速比変更値ΔγCVTが零に設定される。SB1の次はSB2へ移る。
【0114】
SB2においては、無段変速部20の上記基本変速比として図11の無段変速部変速比マップから車速Vに基づいて無段変速部20の変速比γCVTが決定される。SB2の次はSB3に移る。
【0115】
SB3においては、乗算効率ηPが高くなる方向すなわち図15において点PMAXに近付く方向に無段変速部20の変速比γCVTが、後述のSB5およびSB6にて設定変更される変速比変更値ΔγCVTだけ補正される。具体的には、目標とされる無段変速部20の変速比γCVTが現在の変速比γCVTに変速比変更値ΔγCVTを加算した変速比に設定変更され、その目標とされる変速比γCVTになるように、無段変速部20において上述したパワーローラ26の傾転が行われる。SB3の次はSB4へ移る。
【0116】
SB4においては、図15の伝達効率乗算値マップから現在の電気式差動部11の変速比γ0に対応する伝達効率曲線Lηが選択され、その選択された伝達効率曲線Lηにおいて現在の無段変速部20の変速比γCVTに対応する乗算効率ηPが上記伝達効率下限判定値以下であるか否かが判断される。ここで、本来的にはその乗算効率ηPが図15の伝達効率乗算値マップでの上記最高効率に達していないか否かが判断されるべきところ制御負荷軽減のため上記伝達効率下限判定値を用いて判断される。この判断が肯定的である場合、すなわち、上記乗算効率ηPが伝達効率下限判定値以下である場合にはSB5に移る。一方、この判断が否定的である場合には本フローチャートは終了する。
【0117】
上記SB4の判断対象は上記乗算効率ηPであるが、それに代えて無段変速部20のCVT効率ηCVTについて判断されてもよい。その場合にはSB4は図17のように置き替わり、SB4においては、縦軸を無段変速部20のCVT効率ηCVTとした上記無段変速部伝達効率マップとしての図15に基づいて、現在の無段変速部20の変速比γCVTに対応するCVT効率ηCVTが上記CVT効率下限判定値以下であるか否かが判断される。
【0118】
SB5においては、最高効率を示す点PMAX(図15参照)に対応した目標となる変速比γCVTと現状の変速比γCVTとの差が求められ、その差が変速比変更値ΔγCVTと決定される。SB5の次はSB6に移る。
【0119】
SB6においては変速比変更値ΔγCVTの上記ガード処理がなされる。具体的には、SB5にて決定された変速比変更値ΔγCVTの絶対値が予め設けられている上記補正ガード値を超えた場合にはその絶対値がその補正ガード値にまで小さくされて上記変速比変更値ΔγCVTが修正される。従って、SB5にて決定された変速比変更値ΔγCVTはSB6を経て確定する。SB6の次はSB3に移る。なお、上記SB1〜SB6は無段変速制御部80に対応する。
【0120】
このようにして、乗算効率ηPが最高効率PMAXとなるように制御する場合、エンジン動作点PEGが上記燃焼効率最適線LEFに沿うようにエンジン8の制御が行われると、第1電動機回転数NMG1はメカニカルロック点から外れる可能性があるが、この場合、本実施形態では、乗算効率ηPが最高効率PMAXとなることを優先し、第1電動機回転数NMG1がメカニカルロック点から外れることを許容する。
【0121】
次に、上述した如く、車速Vおよびアクセル開度Accで示される車両状態に基づいて切替ブレーキB0または切替クラッチC0を係合(ロック)させるべきか否かを判断する具体的な技術的思想について説明する。
【0122】
この技術的思想は、上記電気式差動部11の差動を制限(例えば切替ブレーキB0を係合)して無段変速部20で総合無段変速比γT(=入力軸14の回転数NIN/出力軸22の回転数NOUT)を変更する場合と、上記電気式差動部11を差動させ、この電気式差動部11と無段変速部20とで総合無段変速比γTを変更する場合とのそれぞれの燃費を車両の走行条件に応じて比較し、燃費の良い方を使用するといったものである。
【0123】
具体的には、以下に(1)および(2)で示す運転状態を比較し、燃費の良い方を使用するといったものである。
(1)切替ブレーキB0または切替クラッチC0を係合(ロック)させることで、第1電動機MG1をロックしたり、電気式差動部11の第3回転要素(差動部サンギヤS0、差動部キャリヤCA0、差動部リングギヤR0)を一体回転させる非差動状態とした場合であって、エンジン動作点PEGが上記燃焼効率最適線LEFに沿うようにエンジン8の制御を行った場合。
(2)切替クラッチC0および切替ブレーキB0を共に解放させることで、電気式差動部11を電気的な無段変速機として機能させた場合であって、無段変速部20の変速比を伝達効率の最も高い変速比(上述した図15から求まる変速比)に設定した場合に、エンジン動作点PEGが上記燃焼効率最適線LEFに沿うようにエンジン8の制御を行った場合。
【0124】
このような各運転状態を比較し、燃費の良い方を使用する。具体的には、これら各運転状態での燃費を実験等で予め計測しておき、車速、エンジン回転数、アクセル開度等をパラメータとして、上記(1)(2)のうちの何れを選択すべきかを予めアップ化しておき、実際の車両走行時には、このマップを参照することで上記(1)(2)のうちの何れかの運転状態が設定されるようになっている。このようにして作成されたものが、図10で示した差動状態切替マップである。つまり、この図10で示すマップに従って切替クラッチC0や切替ブレーキB0の係合および解放を調整することにより、上記(1)(2)のうち燃費の良い方を使用した運転が実現されることになる。言い換えると、電気式差動部11の差動を制限したことによる電気パス量の変化と、無段変速部20の変速比が変化することによるその伝達効率の変化とを比較対象とし、この両者のうち燃費の良い方を使用して運転が行われる。
【0125】
また、上述したような差動状態切替マップに従って上記(1)(2)の何れかの運転状態を選択するものに代えて、現在の車両走行状態から、各種判定を経て上記(1)(2)の何れかの運転状態を選択するようにしてもよい。この場合の判定手順を図18のフローチャートに沿って説明する。このフローチャートに示す制御は、車両の走行中であって、例えば数msec〜数十msec程度の極めて短いサイクルタイムで繰り返し実行される。
【0126】
図18のフローチャートにおいて、先ず、SC1では、車両の走行条件を読み込む。例えば、車速、アクセル開度、エンジン回転数、冷却水温度、シフトポジション等を読み込む。その後、SC2に移り、現在の車両走行状態が強制領域となっているか否かを判定する。この強制領域とは、電気式差動部11を強制的に差動状態(非ロック)としたり、強制的に非差動状態(ロック)とする場合である。例えば、車両の発進時には強制的に差動状態(非ロック)とされ、高トルク域では強制的に非差動状態(ロック)とされる(図10参照)。
【0127】
そして、上記強制領域となっておりSC2でYES判定された場合には、SC8に移り、その他の制御を実施する。つまり、上記(1)(2)のうちの何れを選択すべきかを判断して運転状態を設定するといった制御を実施することなく、現時点での強制領域に従って、電気式差動部11を強制差動状態または強制非差動状態にする。
【0128】
一方、上記強制領域となっておらずSC2でNO判定された場合には、SC3に移り、電気式差動部11のロック有利域(差動状態とするよりも非差動状態とする方が燃費が良好である)か否かを判定する。つまり、上記(1)(2)の各運転状態を比較し、切替ブレーキB0を係合(ロック)させた方が有利であるか否かを判定する。
【0129】
そして、電気式差動部11のロック有利域であり、SC3でYES判定された場合にはSC4に移り、電気式差動部11の差動制限(ロック)を実施し、SC5において、上記無段変速部20により総合変速比γTを変更する。つまり、電気式差動部11は差動制限によって変速比が固定されるので、無段変速部20の変速比を調整することで総合変速比γTを変更する。この場合、第1電動機MG1は強制的にロック点に設定されるため、上記電気パスの低減により動力伝達効率の向上が図れる。また、この場合、エンジン8は、エンジン動作点PEG(図9参照)が燃焼効率最適線LEFに沿うように(燃費最適点となるように)制御される。
【0130】
一方、電気式差動部11の非ロック有利域であり、SC3でNO判定された場合にはSC6に移り、電気式差動部11の差動制限を実施せず、つまり、差動状態として、SC7において、この電気式差動部11および上記無段変速部20により総合変速比γTを変更する。つまり、電気式差動部11の差動による変速比と無段変速部20の変速比とを調整することで総合変速比γTを変更する。
【0131】
尚、無段変速部20の変速比の制限から、エンジン8を燃費最適点で駆動できない場合、電気式差動部11をロックすると燃費の悪化を招くので、それを考慮し、電気式差動部11を差動させてエンジン8を燃費最適点で駆動させるようにしてもよい。この領域は、無段変速部20の伝達効率に影響されるため、この無段変速部20の油温に応じて変化させるようにしてもよい。また、燃料種によって、あるいは可変気筒(例えば、軽負荷時にはエンジン8が4気筒で駆動され高負荷時には8気筒で駆動されるような運転方式を行うもの)によるエンジンの燃費最適点が変更される場合にも、これに従って同様の動作を行わせる。
【0132】
<効果>
本実施形態によれば次のような効果(A1)〜(A10)がある。
【0133】
(A1)上述した如く、電気式差動部11の差動を制限して無段変速部20で総合変速比γTを変更する場合と、電気式差動部11を差動させ、この電気式差動部11と無段変速部20とで総合変速比γTを変更する場合とのうち燃費の良い方を使用した運転を実現できるようにしている。このため、これまでにない大幅な燃費の改善が可能な車両用駆動装置の制御を実現できる。
【0134】
(A2)図11により無段変速部20の変速比γCVTを決定する無段変速制御部80は車速Vおよび燃焼効率最適線LEFに基づき、その燃焼効率最適線LEFにエンジン動作点PEGが沿うように無段変速部20の変速比γCVTを設定すると言えるので、切替クラッチC0が係合されている状態、切替ブレーキB0が係合されている状態、切替クラッチC0および切替ブレーキB0が共に解放されている状態の何れにおいても上記エンジン8を最適燃費で運転することが可能であり、エンジン8の動作状態に起因した燃費の悪化を抑制できる。また、変速比γCVTを連続的に変化させることができる無段変速部20が電気式差動部11と駆動輪3との間の動力伝達経路の一部を構成しているので、第1電動機回転数NMG1が調整されることなく無段変速部20の変速比γCVTを変化させることによりエンジン回転数NEが車速Vに拘束されないようにすることが可能であり、電気式差動部11をその伝達効率η11の充分に高い所定の差動状態に維持しつつ燃焼効率最適線LEFにエンジン動作点PEGが沿うようにエンジン8を運転できる。
【0135】
(A3)差動制御部82は、電気式差動部11におけるエンジン8からの出力の伝達効率η11を高めるように第1電動機回転数NMG1を制御して電気式差動部11の変速比γ0を決定し変更するので、電気式差動部11の伝達効率η11低下による燃費の悪化を抑制できる。
【0136】
(A4)差動制御部82は、第1電動機MG1の電力を零に近付けることによって電気式差動部11の伝達効率η11を高めるので、電力例えば電圧一定であればその制御電流値を検出することにより上記伝達効率η11を高めることを容易に実施し得る。
【0137】
(A5)差動制御部82は第1電動機回転数NMG1を零に近付けることによって電気式差動部11の伝達効率η11を高めてもよく、そのようにした場合には、第1電動機回転数NMG1を検出することにより上記伝達効率η11を高めることを容易に実施し得る。
【0138】
(A6)無段変速制御部80は、電気式差動部11におけるエンジン8からの出力の伝達効率η11と無段変速部20における伝達効率ηCVTとの乗算値である乗算効率ηPを高めるように無段変速部20の変速比γCVTを決定(設定)し変更するので、電気式差動部11又は無段変速部20の伝達効率低下による燃費の悪化を抑制できる。
【0139】
(A7)無段変速制御部80は、上記乗算効率ηP(CVT効率ηCVT)がより高くなるように、図11の無段変速部変速比マップにより決定された無段変速部20の上記基本変速比に対して変速比γCVTの補正を行い、その変速比γCVTを決定し変更するので、図11による上記基本変速比の決定により上記乗算効率ηPがある程度高い状態から上記補正が開始されることとなり、効率的に無段変速部20の変速比γCVTを補正し設定できる。
【0140】
(A8)無段変速制御部80は、現在の無段変速部20の変速比γCVTに対応するCVT効率ηCVTが点PMAX(図15参照)で示される最高効率から所定量低いCVT効率下限判定値以下であるか否かを判断し、その判断が肯定的である場合には、上記点PMAXに近付く方向に無段変速部20の変速比γCVTを変速比変更値ΔγCVTだけ補正するので、充分に無段変速部20の伝達効率γCVTが高くなったところで上記補正が終了し制御負荷を軽減できる。
【0141】
(A9)予め上記補正ガード値が設けられており、無段変速制御部80は変速比変更値ΔγCVT(絶対値)がその補正ガード値を超えない範囲内で無段変速部20の変速比γCVTを補正するので、大幅に無段変速部20の変速比γCVTが変化することが回避され、乗員に違和感を生じさせないようすることが可能である。
【0142】
(A10)図15に示すような上記伝達効率乗算値マップが実験的に求められ無段変速制御部80に予め記憶されており、無段変速制御部80は、その伝達効率乗算値マップに基づいて無段変速部20の上記基本変速比に対して変速比γCVTの補正を行い、その変速比γCVTを決定(設定)し変更するので、その都度上記乗算効率ηPを算出する場合と比較して制御負荷を軽減できる。
【0143】
(第2実施形態)
図19は、第2実施形態の電子制御装置60による制御機能の要部を説明する機能ブロック線図である。この図19では第1実施形態の機能ブロック線図である図8に対し、エンジン燃焼方式制御部112とエンジン燃焼方式判定部114とが追加されている点が異なる。以下、その相違点について主に説明する。
【0144】
本実施形態のエンジン8は、理論空燃比の混合気を燃焼させるストイキ燃焼方式と理論空燃比よりも燃料が希薄な混合気を燃焼させるリーン燃焼方式との複数の燃料消費特性が異なる燃焼方式を備えており、走行状態に適した燃焼方式が採用される。図19のエンジン燃焼方式制御部112は、スロットル弁開度θTH、エンジン回転数NEなどからエンジン負荷を推定し、予め実験的に設定された条件に従いエンジン8の燃焼方式をそのエンジン負荷に応じたストイキ燃焼方式またはリーン燃焼方式に切り替える。
【0145】
本実施形態ではエンジン8の燃焼方式が複数あるのでハイブリッド制御部74は、燃焼効率最適線LEFとして図9ではなく、上記ストイキ燃焼方式とリーン燃焼方式とのそれぞれの燃焼方式に応じた図20のようなエンジン8の燃焼効率最適線LEF(最適燃費率曲線LEF、燃費マップ)を予め記憶している。そして、ハイブリッド制御部74は、エンジン8の燃焼方式に応じた燃焼効率最適線LEFを選択した上で第1実施形態の場合と同様にその選択された燃焼効率最適線LEFに沿ってエンジン8が作動させられるように電気式差動部11の変速比γ0を制御する。
【0146】
エンジン燃焼方式判定部114は、エンジン8の燃焼方式がストイキ燃焼方式とリーン燃焼方式との何れに切り替えられているかを判定する。
【0147】
無段変速制御部80は、第1実施形態の場合と同様に無段変速部20の変速を行う変速制御部として機能し、エンジン走行中において電気式差動部11が差動状態(無段変速状態)である場合には上記無段変速部変速比マップから車速Vに基づいて無段変速部20の変速比γCVTを決定(設定)する。但し、上記無段変速部変速比マップは、第1実施形態と同様にその無段変速部変速比マップに従って車速Vから上記変速比γCVTが決定され燃焼効率最適線LEF上のエンジン動作点PEGでエンジン8が作動させられた場合に理想的には第1電動機回転数NMG1が零乃至は略零(メカニカルロック点)になるように予め実験等により求められ設定された車速Vと変速比γCVTとの関係で設定するところ、本実施形態のエンジン8はストイキ燃焼方式とリーン燃焼方式とを備えており、燃焼効率最適線LEFはストイキ燃焼方式とリーン燃焼方式とのそれぞれの燃焼方式に応じて合計2本あるので、無段変速制御部80が予め記憶しており上記無段変速部20の変速比γCVTの決定に用いる上記無段変速部変速比マップである図21は、それぞれの上記燃焼方式に応じた合計2本の変速比曲線から構成されている点が図11(第1実施形態)と異なる。この図21に示す無段変速部変速比マップにより無段変速部20の変速比γCVTが決定された場合、各回転要素RE1〜RE3の相対回転数を示す共線図では図22のように、何れの燃焼方式でも車速Vで拘束される第4回転要素RE4(出力軸22)の回転数は変わらず理想的には第1電動機回転数NMG1はメカニカルロック点からずれないように運転され、エンジン回転数NEはそれぞれの燃焼方式の燃焼効率最適線LEFに沿ったエンジン動作点PEGに対応した異なった回転数になる。
【0148】
このように無段変速制御部80はエンジン8の燃焼方式に応じて上記2本の変速比曲線から何れかを選択する必要があるので、無段変速制御部80は、エンジン燃焼方式判定部114によりエンジン8がストイキ燃焼方式に切り替えられていると判定された場合には図21の無段変速部変速比マップからストイキ燃焼方式の変速比曲線を選択し、エンジン燃焼方式判定部114によりエンジン8がリーン燃焼方式に切り替えられていると判定された場合には図21の無段変速部変速比マップからリーン燃焼方式の変速比曲線を選択する。そして、無段変速制御部80は車速V及びその選択された変速比曲線に基づいて無段変速部20の変速比γCVTを決定(設定)する。言い換えると、上記選択された変速比曲線は現在の燃焼方式に応じた燃焼効率最適線LEF上のエンジン動作点PEGでエンジン8が作動させられた場合の車速Vと変速比γCVTとの関係であるので、無段変速制御部80は現在の燃焼方式に応じた燃焼効率最適線LEFに基づいて無段変速部20の変速比γCVTを決定(設定)する。
【0149】
図23は、本実施形態の電子制御装置60の制御作動の要部すなわちエンジン走行中において電気式差動部11が差動状態(無段変速状態)である場合にエンジン8の燃焼方式に応じて無段変速部20の変速比γCVTを決定する制御作動を説明するフローチャートであり、例えば数msec〜数十msec程度の極めて短いサイクルタイムで繰り返し実行される。
【0150】
先ず、エンジン燃焼方式判定部114に対応するSD1においては、エンジン8の燃焼方式がリーン燃焼方式に切り替えられているかが判定される。この判定が肯定的である場合、すなわち、エンジン8の燃焼方式がリーン燃焼方式に切り替えられている場合にはSD2に移る。一方、この判定が否定的である場合、すなわち、エンジン8の燃焼方式がストイキ燃焼方式に切り替えられている場合にはSD3に移る。
【0151】
SD2においては、図21の無段変速部変速比マップからリーン燃焼方式の変速比曲線が選択される。SD2の次はSD4に移る。
【0152】
SD3においては、図21の無段変速部変速比マップからストイキ燃焼方式の変速比曲線が選択される。SD3の次はSD4に移る。
【0153】
SD4においては、上記SD2もしくはSD3にて選択された変速比曲線が上記無段変速部20の基本変速比を決定するための変速比曲線としてメモリにストアされる。そして、その選択された変速比曲線及び車速Vに基づいて無段変速部20の変速比γCVTが決定される。なお、上記SD2〜SD4は無段変速制御部80に対応する。
【0154】
そして、本実施形態においても、上述した第1実施形態の場合と同様に、電気式差動部11の差動を制限して無段変速部20で総合変速比γTを変更する場合と、電気式差動部11を差動させ、この電気式差動部11と無段変速部20とで総合変速比γTを変更する場合とのうち燃費の良い方を使用した運転を実現できるようにしている。このため、これまでにない大幅な燃費の改善が可能な車両用駆動装置の制御を実現できる。
【0155】
本実施形態によれば、第1実施形態の効果(A1)〜(A10)に加え次のような効果(B1)がある。
【0156】
(B1)無段変速制御部80はエンジン8の燃焼方式に応じて選択された変速比曲線(図21参照)と車速Vとに基づいて無段変速部20の変速比γCVTを決定する。すなわち、現在の燃焼方式に応じた燃焼効率最適線LEF(図20参照)に基づいて無段変速部20の変速比γCVTを決定するので、エンジン8の燃焼方式が変更されてもその燃焼方式に応じて無段変速部20の変速比γCVTが決定(設定)され、それぞれの燃焼方式に応じた最適燃費を実現するようにエンジン8が運転され電気式差動部11の伝達効率η11が向上して車両全体として燃費低下を抑制することが可能である。
【0157】
(第3実施形態)
次に、第3実施形態について説明する。本実施形態は、機械式無段変速部の構成が上記第1実施形態のものと異なっている。具体的には、機械式無段変速部としてベルト式無段変速機(ベルト式CVT)を適用したものであって、FF(フロントエンジン・フロントドライブ)型車両に適用したものである。その他、駆動装置10の構成や制御は上記第1実施形態や第2実施形態のものと同様であるので、ここでは、このベルト式無段変速機で構成される無段変速部の構成についてのみ説明する。
【0158】
図24は、本実施形態の駆動装置10を示すスケルトン図である。伝達部材18の後段側に連結されているベルト式無段変速部120は、その変速比γCVT(=伝達部材18の回転数N18/出力軸22の回転数NOUT)を機械的作用により連続的に変化させることができる無段の自動変速機として機能するものである。
【0159】
そして、第1軸心RC1上に設けられ且つ伝達部材18に連結された入力側プーリであるプライマリプーリ121と、第2軸心RC2上にプライマリプーリ121と並列に設けられ且つ出力軸22に連結された出力側プーリであるセカンダリプーリ122と、これら一対のプーリ121,122の間に巻き付けられ、その一対のプーリ121,122間を摩擦力により動力伝達可能に連結するベルト123とを備えている。尚、図24における符号32は、ベルト式無段変速部120の出力側に出力軸22を介して連結されたデフドライブギヤであり、符号34は、デフドライブギヤ32に噛み合うデフリングギヤである。このデフリングギヤ34は上記ディファレンシャル装置2に連結されている。
【0160】
上記プライマリプーリ121は、回転軸方向にスライド可能な円錐状の可動シーブ121aとスライド不能に固定された円錐状の固定シーブ121bとから構成されており、可動シーブ121aと固定シーブ121bが頂点を向けて相対向して組み合わされて、ベルト123が接触するV字状のプライマリプーリ溝124が形成されている。またセカンダリプーリ122もプライマリプーリ121と同様の構成である。つまり、セカンダリプーリ122は可動シーブ122aと固定シーブ122bとから構成されており、両者の間にベルト123が接触するV字状のセカンダリプーリ溝125が形成されている。
【0161】
このベルト式無段変速部120では、プライマリプーリ121およびセカンダリプーリ122のそれぞれとベルト123との間で動力伝達のための摩擦力を得るためにベルト123に張力が与えられており、プライマリプーリ溝124とセカンダリプーリ溝125との何れでも各シーブ121a,121b,122a,122bの円錐面でベルト123と接触している。そのため、プライマリプーリ121の可動シーブ121aを固定シーブ121bに近付け、それと同期してセカンダリプーリ122の可動シーブ122aを固定シーブ122bから離すほど、プライマリプーリ121のベルト123との接触径(有効径)は大きくなりセカンダリプーリ122のベルト123との接触径(有効径)は小さくなってベルト式無段変速部120の変速比γCVTは小さくなる。すなわち、油圧制御などによってプライマリプーリ121とセカンダリプーリ122とが互いに同期してスライドされることによりベルト式無段変速部120の変速比γCVTは連続的に変化する。
【0162】
このベルト式無段変速部120を作動させるためのより具体的な構成として、上記プライマリプーリ121の可動シーブ121aおよびセカンダリプーリ122の可動シーブ122aには、油圧アクチュエータ126,127がそれぞれ備えられている。つまり、これら油圧アクチュエータ126,127内に形成された作動油圧室に所定油圧を作用させることで各可動シーブ121a,122aを固定シーブ121b,122bに対して進退移動させる構成となっている。
【0163】
また、プライマリプーリ121の油圧アクチュエータ126およびセカンダリプーリ122の油圧アクチュエータ127には、油圧制御回路を介して油圧がそれぞれ制御されて供給されるようになっている。つまり、プライマリプーリ121に備えられた油圧アクチュエータ126にはプライマリ制御油圧Ppriが供給され、セカンダリプーリ122に備えられた油圧アクチュエータ127にはセカンダリ制御油圧Psecが供給されるようになっている。
【0164】
より詳しくは、図示しないオイルパンから吸引されオイルポンプから吐出された作動油が、デューティ制御される調圧バルブにより調圧され、ライン圧PLとして制御される。このライン圧PLを有する作動油は、デューティ制御されるプライマリ側減圧バルブにより上記プライマリ制御油圧Ppriとされ、入力側(プライマリ側)の油圧アクチュエータ126に供給される。更に、ライン圧PLを有する作動油は、同じくデューティ制御され、セカンダリ側減圧バルブにより制御されて上記セカンダリ制御油圧Psecとされ、出力側(セカンダリ側)の油圧アクチュエータ127に供給される。
【0165】
上記無段変速制御部80には、上記伝達部材(プライマリシャフト)18の回転数N18および出力軸(セカンダリシャフト)22の回転数NOUT等、更には車速Vやアクセル開度Acc等の情報が入力され、予め実験等により求められているマップ等に基づいて、所要の変速比γCVT(=N18/NOUT)やベルト挟圧力を得るべく、上述のプライマリ制御油圧Ppriおよびセカンダリ制御油圧Psecが形成される。
【0166】
そして、プライマリ側の油圧アクチュエータ126の作動油圧室に作用するプライマリ制御油圧Ppriを制御することにより、プライマリプーリ溝124の幅が調整される。その結果、プライマリプーリ121におけるベルト123の巻き掛け半径が変化し、ベルト式無段変速部120の入力回転数N18と出力回転数NOUTとの比、すなわち変速比γCVTが無段階(連続的)に制御されることになる。
【0167】
更に、セカンダリ側の油圧アクチュエータ127の作動油圧室に作用するセカンダリ制御油圧Psecを制御することにより、セカンダリプーリ溝125の幅が変化する。つまり、ベルト123に対するセカンダリプーリ122の軸線方向のベルト挟圧(言い換えれば推力)が制御される。このベルト挟圧によりベルト123の張力が制御され、プライマリプーリ121およびセカンダリプーリ122とベルト123との接触面圧が制御される。このセカンダリ制御油圧Psecは、無段変速部120のプライマリプーリ121に接続される伝達部材18に入力されるトルクおよび変速比などに基づいて制御される。
【0168】
このように構成されたベルト式無段変速機で成る無段変速部120を備えた駆動装置1においても、上述した第1実施形態や第2実施形態の場合と同様に、電気式差動部11の差動を制限して無段変速部120で総合変速比γTを変更する場合と、電気式差動部11を差動させ、この電気式差動部11と無段変速部120とで総合変速比γTを変更する場合とのうち燃費の良い方を使用した運転を実現できるようにしている。このため、これまでにない大幅な燃費の改善が可能な車両用駆動装置の制御を実現できる。
【0169】
本実施形態によれば、第1実施形態に対し無段変速部120の機械的構造が異なるだけであるので、第1実施形態の効果(A1)〜(A10)と同様の効果がある。
【0170】
(他の実施形態)
以上、本発明の実施形態を図面に基づいて詳細に説明したが、これはあくまでも一実施形態であり、本発明は当業者の知識に基づいて種々の変更、改良を加えた態様で実施することができる。
【0171】
例えば、前述の第2実施形態では、エンジン8の燃焼方式が変更される場合について説明されているが、エンジン8の運転方式であるエンジン8の燃焼方式が変更される場合のみならずその他の運転方式が変更される場合にも同様の制御作動で対応し得る。例えば、軽負荷時にはエンジン8が4気筒で駆動され高負荷時には8気筒で駆動されるような可変気筒の運転方式を備えたエンジン8にも上記制御作動で同様に対応し得る。
【0172】
また前述の第2実施形態において、エンジン8の燃焼方式はリーン燃焼方式とストイキ燃焼方式との2方式であるが3方式以上であっても差し支えない。
【0173】
また前述の第1実施形態〜第3実施形態において、第1電動機MG1の運転状態が制御されることにより、電気式差動部11(動力分配機構16)はその変速比γ0が最小値γ0minから最大値γ0maxまで連続的に変化させられる電気的な無段変速機として機能するものであったが、例えば電気式差動部11の変速比γ0を連続的ではなく差動作用を利用して敢えて段階的に変化させるものであってもよい。また、無段変速部20,120もその変速比γCVTを敢えて段階的に変化させるものであってもよい。
【0174】
また前述の第1実施形態〜第3実施形態において、エンジン8と電気式差動部11とは直結されているが、エンジン8が電気式差動部11にクラッチ等の係合要素を介して連結されていてもよい。
【0175】
また前述の第1実施形態〜第3実施形態において、第1電動機MG1と第2回転要素RE2とは直結されており、第2電動機MG2と第3回転要素RE3とは直結されているが、第1電動機MG1が第2回転要素RE2にクラッチ等の係合要素を介して連結され、第2電動機MG2が第3回転要素RE3にクラッチ等の係合要素を介して連結されていてもよい。
【0176】
また前述の第1実施形態〜第3実施形態において、エンジン8から駆動輪3への動力伝達経路において、電気式差動部11の次に無段変速部20が連結されているが、無段変速部20の次に電気式差動部11が連結されている順番でもよい。要するに、無段変速部20は、エンジン8から駆動輪3への動力伝達経路の一部を構成するように設けられておればよい。また、本発明は、電気式差動部11を備えていないシステムに対しても適用が可能である。
【0177】
また前述の第1実施形態〜第3実施形態において、図1によれば、電気式差動部11と無段変速部20とは直列に連結されているが、駆動装置10全体として電気的に差動状態を変更し得る電気式差動機能とその電気式差動機能による変速とは異なる原理で変速する機能とが備わっていれば、電気式差動部11と無段変速部20とが機械的に独立していなくても本発明は適用される。
【0178】
また前述の第1実施形態〜第3実施形態において、動力分配機構16はシングルプラネタリであるが、ダブルプラネタリであってもよい。
【0179】
また前述の第1実施形態〜第3実施形態において、差動部遊星歯車装置17を構成する第1回転要素RE1にはエンジン8が動力伝達可能に連結され、第2回転要素RE2には第1電動機MG1が動力伝達可能に連結され、第3回転要素RE3には駆動輪3への動力伝達経路が連結されているが、例えば、2つの遊星歯車装置がそれを構成する一部の回転要素で相互に連結された構成において、その遊星歯車装置の回転要素にそれぞれエンジン、電動機、駆動輪が動力伝達可能に連結されており、その遊星歯車装置の回転要素に連結されたクラッチ又はブレーキの制御により電気式差動部11が有段変速と無段変速とに切替可能な構成にも本発明は適用される。
【0180】
また前述の第1実施形態〜第3実施形態において、第2電動機MG2は伝達部材18に直接連結されているが、第2電動機MG2の連結位置はそれに限定されず、エンジン8又は伝達部材18から駆動輪3までの間の動力伝達経路に直接的或いは変速機、遊星歯車装置、係合装置等を介して間接的に連結されていてもよい。
【0181】
また、前述の第1実施形態〜第3実施形態の動力分配機構16では、差動部キャリヤCA0がエンジン8に連結され、差動部サンギヤS0が第1電動機MG1に連結され、差動部リングギヤR0が伝達部材18に連結されていたが、それらの連結関係は、必ずしもそれに限定されるものではなく、エンジン8、第1電動機MG1、伝達部材18は、差動部遊星歯車装置17の3要素CA0、S0、R0のうちのいずれと連結されていても差し支えない。
【0182】
また前述の第1実施形態〜第3実施形態において、エンジン8は入力軸14と直結されていたが、例えばギヤ、ベルト等を介して作動的に連結されておればよく、共通の軸心上に配置される必要もない。
【0183】
また前述の第1実施形態〜第3実施形態において、第1電動機MG1および第2電動機MG2は、入力軸14に同心に配置されて第1電動機MG1は差動部サンギヤS0に連結され第2電動機MG2は伝達部材18に連結されていたが、必ずしもそのように配置される必要はなく、例えばギヤ、ベルト、減速機等を介して作動的に第1電動機MG1は差動部サンギヤS0に連結され、第2電動機MG2は伝達部材18に連結されていてもよい。
【0184】
また前述の第1実施形態〜第3実施形態において、動力分配機構16は1組の差動部遊星歯車装置17から構成されていたが、2以上の遊星歯車装置から構成されて、非差動状態(定変速状態)では3段以上の変速機として機能するものであってもよい。
【0185】
また前述の第1実施形態〜第3実施形態において、第2電動機MG2はエンジン8から駆動輪3までの動力伝達経路の一部を構成する伝達部材18に連結されているが、第2電動機MG2がその動力伝達経路に連結されていることに加え、クラッチ等の係合要素を介して動力分配機構16にも連結可能とされており、第1電動機MG1の代わりに第2電動機MG2によって動力分配機構16の差動状態を制御可能とする駆動装置10の構成であってもよい。
【0186】
また前述した複数の実施形態はそれぞれ、例えば優先順位を設けるなどして、相互に組み合わせて実施することができる。
【0187】
その他、一々例示はしないが、本発明はその趣旨を逸脱しない範囲内において種々の変更が加えられて実施されるものである。
【図面の簡単な説明】
【0188】
【図1】第1実施形態に係るハイブリッド車両用駆動装置の構成を説明するスケルトン図である。
【図2】トロイダル式無段変速部の構成を模式的に示す図であって、ディスクの回転軸心に対して直交する方向から見た断面図である。
【図3】トロイダル式無段変速部の構成を模式的に示す図であって、ディスクの回転軸心に沿う方向から見た断面図である。
【図4】トロイダル式無段変速部の変速制御を概念的に示したブロック図である。
【図5】ハイブリッド車両用駆動装置において各回転要素の回転数の相対関係を直線上で表す共線図である。
【図6】ハイブリッド車両用駆動装置に設けられた電子制御装置の入出力信号を説明する図である。
【図7】ハイブリッド車両用駆動装置を操作するためのシフトレバーを備えたシフト操作装置の一例を示す図である。
【図8】第1実施形態に係るハイブリッド車両用駆動装置において、電子制御装置による制御機能の要部を説明する機能ブロック線図である。
【図9】第1実施形態に係るハイブリッド車両用駆動装置におけるエンジンの燃焼効率最適線を表す図である。
【図10】第1実施形態に係るハイブリッド車両用駆動装置において、車速とアクセル開度とをパラメータとする同じ二次元座標に構成された、差動部の差動状態の切替判断の基となる予め記憶された差動状態切替線図の一例と、エンジン走行とモータ走行とを切り替えるためのエンジン走行領域とモータ走行領域との境界線を有する予め記憶された駆動力源切替線図の一例とを示す図である。
【図11】図8の無段変速制御部が無段変速部の基本変速比としてその変速比を決定するために用いる車速と無段変速部の変速比との関係を示す無段変速部変速比マップを示す図である。
【図12】図8の差動制御部が第1電動機回転数NMG1を零に近付ける方向に補正するために用いる第1電動機回転数変更値ΔNMG1と電気パス量との予め設定された関係を示す図である。
【図13】第1実施形態において、図6の電子制御装置の制御作動の要部すなわちエンジン走行中において差動部が差動状態である場合に差動部の伝達効率を向上させるための制御を説明するフローチャート図である。
【図14】図13のSA4を置換するステップを示す図である。
【図15】無段変速制御部が無段変速部の変速比を補正するために用いる無段変速部の変速比と伝達効率との関係を示す図である。
【図16】図6の電子制御装置の制御作動の要部すなわちエンジン走行中において差動部が差動状態である場合に乗算効率を向上させるための制御作動を説明するフローチャート図である。
【図17】図16のSB4を置換するステップを示す図である。
【図18】車両走行状態に応じて運転状態を選択するための動作の手順を示すフローチャート図である。
【図19】第2実施形態において、図6の電子制御装置による制御機能の要部を説明する機能ブロック線図である。
【図20】第2実施形態において、エンジンの燃焼効率最適線を表す図であって、第1実施形態の図9に相当する図である。
【図21】第2実施形態において、図19の無段変速制御部が無段変速部の基本変速比としてその変速比を決定するために用いる車速と無段変速部の変速比との関係を示す無段変速部変速比マップであって、第1実施形態の図11に相当する図である。
【図22】第2実施形態において、エンジンの燃焼方式が切り替えられた場合の各回転要素の回転数の相対関係を例示した共線図である。
【図23】第2実施形態において、図6の電子制御装置の制御作動の要部すなわちエンジン走行中において差動部が差動状態である場合にエンジンの燃焼方式に応じて無段変速部の変速比を決定する制御作動を説明するフローチャート図である。
【図24】図1のハイブリッド車両用駆動装置の無段変速部をそれとは異なる構造の無段変速部に置換した第3実施形態のスケルトン図である。
【符号の説明】
【0189】
8 エンジン(内燃機関)
10 駆動装置(車両用駆動装置)
11 差動部(電気式差動部)
16 動力分配機構(差動機構)
20 無段変速部
120 無段変速部
MG1 第1電動機
MG2 第2電動機
S0 差動部サンギヤ
P0 差動部遊星歯車
CA0 差動部キャリヤ
R0 差動部リングギヤ
【特許請求の範囲】
【請求項1】
電気式差動部と無段変速部とを備えた車両用駆動装置の制御装置であって、
上記電気式差動部の差動を制限して上記無段変速部で総合無段変速比を変更する場合と、上記電気式差動部を差動させ、この電気式差動部と上記無段変速部とで総合無段変速比を変更する場合とのそれぞれの燃費を車両の走行条件に応じて比較し、燃費の良い方を使用することを特徴とする車両用駆動装置の制御装置。
【請求項2】
上記請求項1記載の車両用駆動装置の制御装置において、
上記電気式差動部の差動を制限した電気パス量の変化と、上記無段変速部の変速比が変化することによるその伝達効率の変化とが比較対象となることを特徴とする車両用駆動装置の制御装置。
【請求項3】
上記請求項1または2記載の車両用駆動装置の制御装置において、
上記電気式差動部の入力側にはエンジンが配設されており、このエンジンの動作点が相違する場合、その変化が考慮されて、上記電気式差動部の差動を制限して上記無段変速部で総合無段変速比を変更する場合と、上記電気式差動部を差動させ、この電気式差動部と上記無段変速部とで総合無段変速比を変更する場合とのうちの燃費の良い方を使用することを特徴とする車両用駆動装置の制御装置。
【請求項4】
上記請求項1、2または3記載の車両用駆動装置の制御装置において、
上記車両の走行条件は車速であることを特徴とする車両用駆動装置。
【請求項5】
上記請求項1〜4のうち何れか一つに記載の車両用駆動装置の制御装置において、
上記電気式差動部の差動を制限した状態は、ローおよびハイの2つの状態を有することを特徴とする車両用駆動装置。
【請求項6】
上記請求項1〜5のうち何れか一つに記載の車両用駆動装置の制御装置において、
上記電気式差動部の差動の強制領域ではない場合に、上記電気式差動部の差動を制限して上記無段変速部で総合無段変速比を変更する場合と、上記電気式差動部を差動させ、この電気式差動部と上記無段変速部とで総合無段変速比を変更する場合とのうちの燃費の良い方を使用することを特徴とする車両用駆動装置の制御装置。
【請求項7】
上記請求項1〜6のうち何れか一つに記載の車両用駆動装置の制御装置において、
上記電気式差動部は、差動ギヤと2つの電動機とを備えて構成されていることを特徴とする車両用駆動装置の制御装置。
【請求項1】
電気式差動部と無段変速部とを備えた車両用駆動装置の制御装置であって、
上記電気式差動部の差動を制限して上記無段変速部で総合無段変速比を変更する場合と、上記電気式差動部を差動させ、この電気式差動部と上記無段変速部とで総合無段変速比を変更する場合とのそれぞれの燃費を車両の走行条件に応じて比較し、燃費の良い方を使用することを特徴とする車両用駆動装置の制御装置。
【請求項2】
上記請求項1記載の車両用駆動装置の制御装置において、
上記電気式差動部の差動を制限した電気パス量の変化と、上記無段変速部の変速比が変化することによるその伝達効率の変化とが比較対象となることを特徴とする車両用駆動装置の制御装置。
【請求項3】
上記請求項1または2記載の車両用駆動装置の制御装置において、
上記電気式差動部の入力側にはエンジンが配設されており、このエンジンの動作点が相違する場合、その変化が考慮されて、上記電気式差動部の差動を制限して上記無段変速部で総合無段変速比を変更する場合と、上記電気式差動部を差動させ、この電気式差動部と上記無段変速部とで総合無段変速比を変更する場合とのうちの燃費の良い方を使用することを特徴とする車両用駆動装置の制御装置。
【請求項4】
上記請求項1、2または3記載の車両用駆動装置の制御装置において、
上記車両の走行条件は車速であることを特徴とする車両用駆動装置。
【請求項5】
上記請求項1〜4のうち何れか一つに記載の車両用駆動装置の制御装置において、
上記電気式差動部の差動を制限した状態は、ローおよびハイの2つの状態を有することを特徴とする車両用駆動装置。
【請求項6】
上記請求項1〜5のうち何れか一つに記載の車両用駆動装置の制御装置において、
上記電気式差動部の差動の強制領域ではない場合に、上記電気式差動部の差動を制限して上記無段変速部で総合無段変速比を変更する場合と、上記電気式差動部を差動させ、この電気式差動部と上記無段変速部とで総合無段変速比を変更する場合とのうちの燃費の良い方を使用することを特徴とする車両用駆動装置の制御装置。
【請求項7】
上記請求項1〜6のうち何れか一つに記載の車両用駆動装置の制御装置において、
上記電気式差動部は、差動ギヤと2つの電動機とを備えて構成されていることを特徴とする車両用駆動装置の制御装置。
【図1】


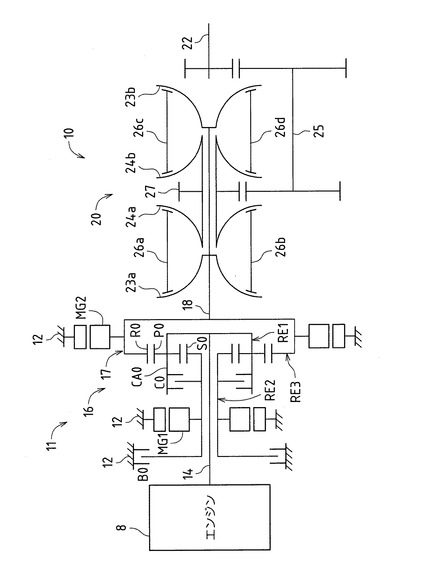
【図2】
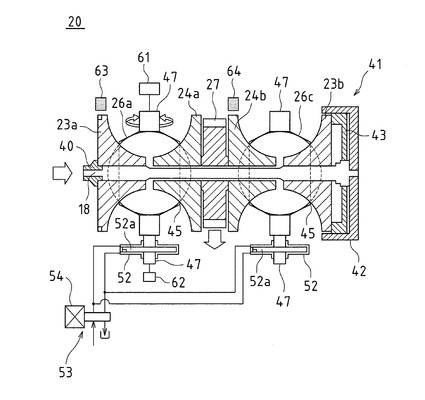
【図3】
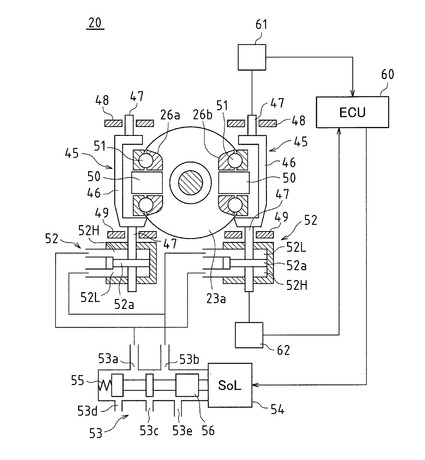
【図4】
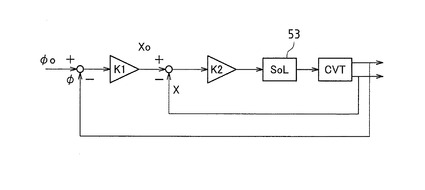
【図5】
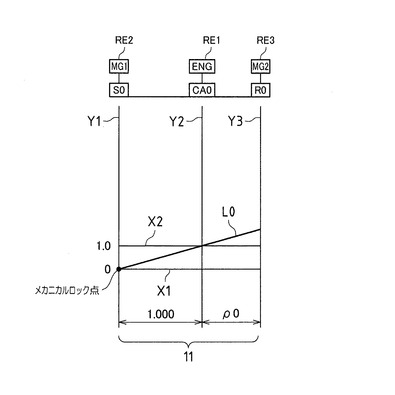
【図6】
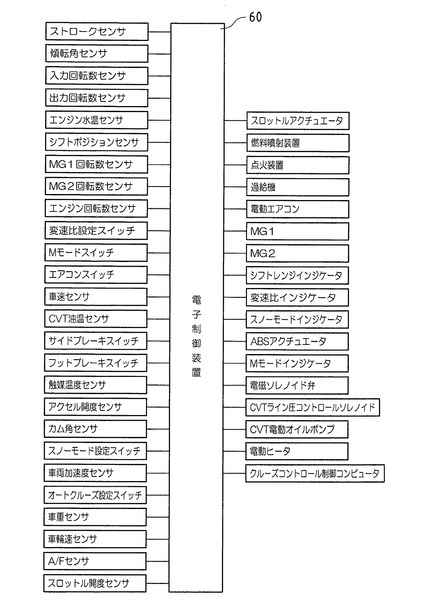
【図7】
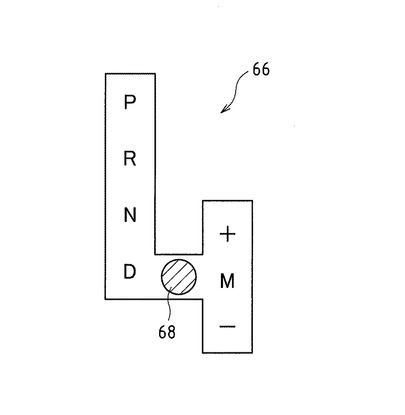
【図8】
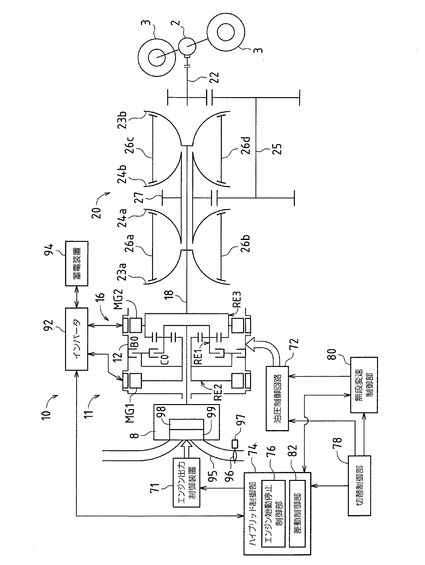
【図9】

【図10】
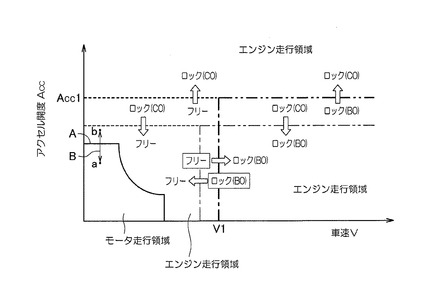
【図11】
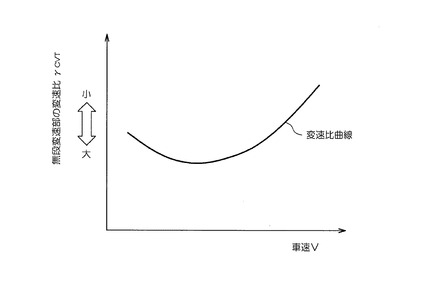
【図12】
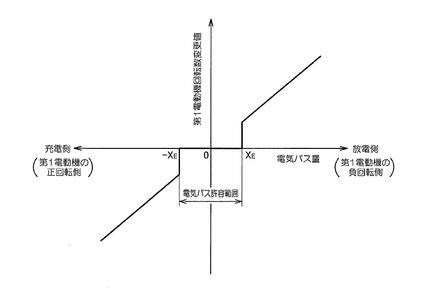
【図13】
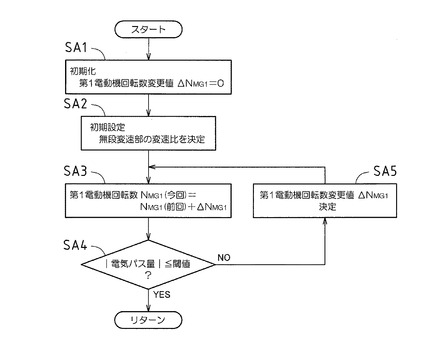
【図14】
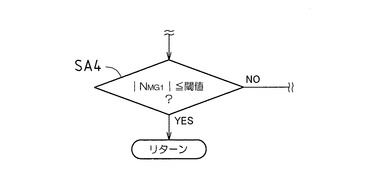
【図15】
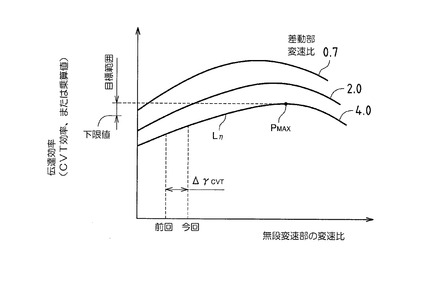
【図16】
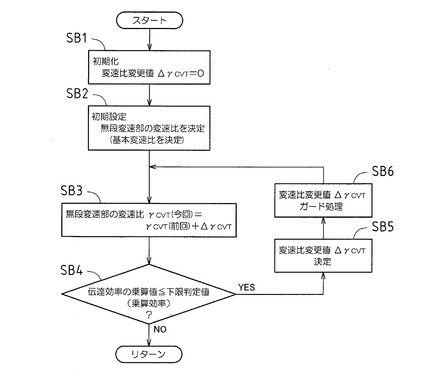
【図17】

【図18】

【図19】
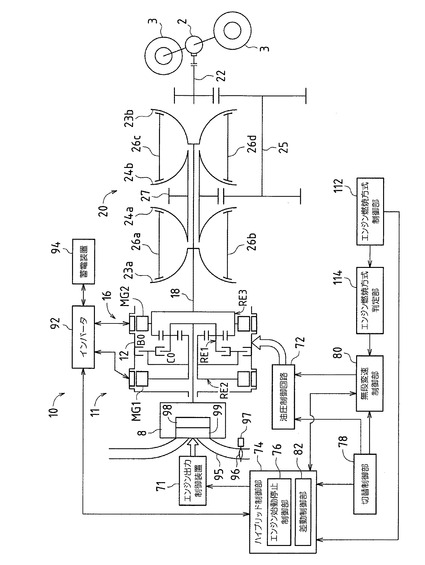
【図20】
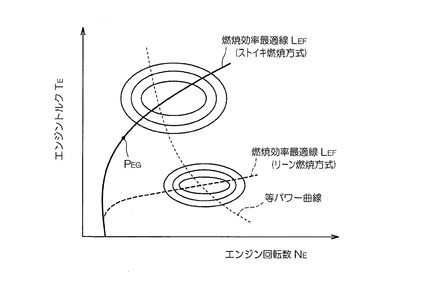
【図21】
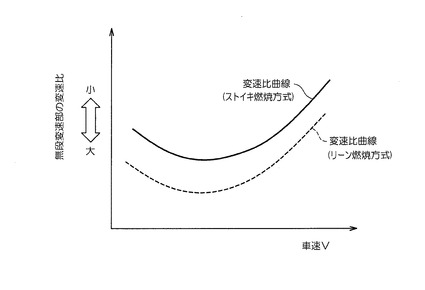
【図22】
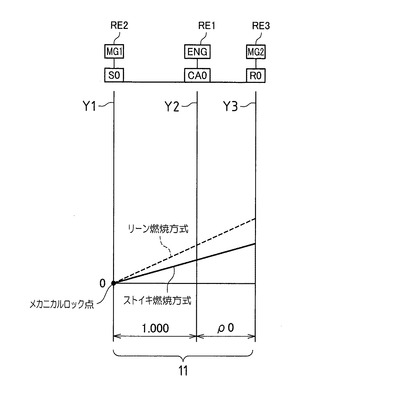
【図23】

【図24】
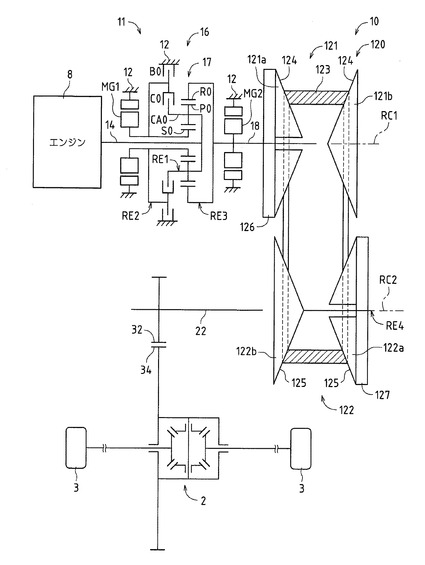
【図2】
【図3】
【図4】
【図5】
【図6】
【図7】
【図8】
【図9】
【図10】
【図11】
【図12】
【図13】
【図14】
【図15】
【図16】
【図17】
【図18】
【図19】
【図20】
【図21】
【図22】
【図23】
【図24】
【公開番号】特開2009−255828(P2009−255828A)
【公開日】平成21年11月5日(2009.11.5)
【国際特許分類】
【出願番号】特願2008−109090(P2008−109090)
【出願日】平成20年4月18日(2008.4.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
【公開日】平成21年11月5日(2009.11.5)
【国際特許分類】
【出願日】平成20年4月18日(2008.4.18)
【出願人】(000003207)トヨタ自動車株式会社 (59,920)
【Fターム(参考)】
[ Back to top ]